
ローラコンベア用ストッパシステム
【課題】ローラコンベアに複数のストッパ機構をシンプルな構成で設けることにより、連続的に投入される物品を適切なタイミングで下流側排出端に排出可能なローラコンベア用ストッパシステムを提供する。
【解決手段】ローラコンベア用ストッパシステム(100)は、下り傾斜を有するレール(11)に回転自在な複数のローラ(12)が配設されてなるローラコンベアにおいて、搬送物品(50)を停止させる。ストッパシステム(100)は、駆動軸(134)を回転させる駆動部(130)と、駆動軸の回転駆動に伴って停止状態と非停止状態とを切り替え可能な第1のストッパ機構(110)及び第2のストッパ機構(120)とを備える。第1のストッパ機構(110)及び第2のストッパ機構(120)はシャフト(116)によって互いに連結されており、第1のストッパ機構が停止状態と非停止状態の一方の状態をとるとき第2のストッパ機構は他方の状態をとる。
【解決手段】ローラコンベア用ストッパシステム(100)は、下り傾斜を有するレール(11)に回転自在な複数のローラ(12)が配設されてなるローラコンベアにおいて、搬送物品(50)を停止させる。ストッパシステム(100)は、駆動軸(134)を回転させる駆動部(130)と、駆動軸の回転駆動に伴って停止状態と非停止状態とを切り替え可能な第1のストッパ機構(110)及び第2のストッパ機構(120)とを備える。第1のストッパ機構(110)及び第2のストッパ機構(120)はシャフト(116)によって互いに連結されており、第1のストッパ機構が停止状態と非停止状態の一方の状態をとるとき第2のストッパ機構は他方の状態をとる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムの技術分野に関する。
【背景技術】
【0002】
物品の搬送において、下り傾斜を有するレール上に複数の回転自在なローラが配設してなるローラコンベアが広く利用されている。この種のローラコンベアでは、当該下り傾斜に沿って物品が自重により搬送されるが、搬送途中の物品を所定位置で停止させるためのストッパ機構が設けられる場合がある。
【0003】
例えば特許文献1には、ローラコンベアの搬送面に対し略垂直方向に入退自在なストッパにより、搬送中の物品を搬送面上で停止可能なストッパ機構が開示されている。また特許文献2では、このようなストッパ機構の構造を工夫することにより、ローラコンベアの下側にコンパクトに配置可能なストッパ機構が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−108931号公報
【特許文献2】特開2000−72246号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
下り傾斜に沿って物品が搬送されるローラコンベアでは自重によって物品の搬送が行われるため、連続的に物品が投入された場合、ローラコンベアの下流側排出端において、投入された物品同士が玉突き状に衝突してしまうという問題がある。この問題に対する解決手段として、上述したストッパ機構を利用して、下流側排出端への物品の搬送タイミングを調整することが考えられる。このようにストッパ機構を利用する場合、上流側から次々に搬送されてくる物品を下流側排出端に一つずつ順に送り出す必要がある。即ち、一の物品を下流側排出端に送り出す際に、上流側にある他の物品が当該一の物品と共に下流側排出端になだれ込まないように停止させておく必要がある。このような動作を実現するためには、ローラコンベアに複数のストッパ機構を設ける必要があるが、従来のストッパ機構をそのまま複数設けると構造が複雑化してしまい、製造コストやメンテナンスに要する手間が増大してしまうという問題がある。
【0006】
本発明は、上述した問題点に鑑みなされたものであり、ローラコンベアに複数のストッパ機構をシンプルな構成で設けることにより、連続的に投入される物品を適切なタイミングで下流側排出端に排出可能なローラコンベア用ストッパシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のローラコンベア用ストッパシステムは上記課題を解決するために、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムであって、前記搬送面より下側に設けられた駆動軸を回転駆動させる駆動部と、前記駆動軸の回転駆動に伴って、第1のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置で停止させる停止状態と、前記第1のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第1のストッパ機構と、前記駆動軸の回転駆動に伴って、第2のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置より下流側にある第2の停止位置で停止させる停止状態と、前記第2のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第2のストッパ機構とを備え、前記第1のストッパ機構が前記停止状態と前記非停止状態の一方の状態をとるとき、前記第2のストッパ機構は他方の状態をとるように構成し、前記第2のストッパが前記搬送面の下側に退いた際に、前記第2の停止位置に停止された物品が前記下流側排出端に搬送されると共に、前記第1のストッパが前記搬送面の上側に突出することによって前記第1の停止位置より上流側にある物品を前記第1の停止位置で停止させることを特徴とする。
【0008】
本発明によれば、下流側にある第2のストッパ機構を停止状態から非停止状態に切り替えた場合、上流側にある第1のストッパ機構は逆に非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構によって停止されていた下流側の物品は下流側排出端に向って搬送される一方で、上流側にある物品は第1のストッパ機構によって停止されるので、上流側の物品が下流側の物品と共に下流側排出端になだれ込むことを防止することができる。このように、第1のストッパ及び第2のストッパを連動させて駆動することで、下流側排出端への物品の搬送タイミングを制御することが可能となる。
【0009】
好ましくは、前記第1のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第1のストッパ機構の動作に連動して、前記第1の停止位置で停止された物品を下流側に押し出す第1のフィーダ機構と、前記第2のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第2のストッパ機構の動作に連動して、前記第2の停止位置で停止された物品を下流側に押し出す第2のフィーダ機構とを備えるとよい。
【0010】
この場合、第1のストッパ機構及び第2のストッパ機構によって停止された物品を、それぞれ第1及び第2のフィーダ機構によって下流側に押し出すことができるので、一度ローラコンベア上で停止した物品に初期動力を与え、下流側への搬送をスムーズに促すことができる。本発明のローラコンベア用ストッパシステムが搭載されるローラコンベアは下り傾斜を有するため、基本的に、物品は自重によって下流側に搬送されるが、該下り傾斜が緩やかな場合、搬送面上で一旦停止させた物品は慣性力によってその場に留まろうとするため、搬送が滞ってしまうおそれがある。本発明ではこのような場合であっても、フィーダ機構によって搬送面上で停止された物品に対して初期動力を与えることができるので、搬送を滞らせることなく、スムーズな搬送を行うことができる。特に、このような第1及び第2のフィーダ機構の動作は、それぞれ第1及び第2のストッパ機構の動作に連動して行われるため、駆動力源を新たに付加することなく、シンプルな構成で実現することができる。
【0011】
好ましくは、前記第1のフィーダ機構及び前記第2のフィーダ機構は、前記駆動軸の回転駆動を往復駆動に変換可能なクランク機構を介して、前記物品の搬送方向に沿って往復運動可能に構成されているとよい。
【0012】
この場合、クランク機構を用いることによって回転軸の回転駆動を往復駆動に変換できるので、回転軸の回転駆動力を利用して第1及び第2のフィーダ機構を駆動することができる。これにより、第1及び第2のフィーダ機構の駆動力源を別途設ける必要がなくなるので、ストッパ機構を構成する部品数を抑制し、よりシンプルな構成を実現することができる。
【0013】
好ましくは、前記駆動部は、前記下流側排出端から前記物品が外部に排出された時点から所定の期間が経過した後に、前記第2のストッパ機構を停止状態から非停止状態に切り替えるように前記駆動軸を回転駆動するとよい。
【0014】
この場合、例えば下流側排出端からフォークリフトなどの輸送機によって物品を外部に搬送された場合、所定の期間が経過した後に、次の物品が上流側から下流側排出端に搬送されるので、下流側排出端からの物品を回収した際に、上流側から他の物品が玉突き的になだれ込むことを防止することができる。
【発明の効果】
【0015】
本発明によれば、下流側にある第2のストッパ機構を停止状態から非停止状態に切り替えた場合、上流側にある第1のストッパ機構は逆に非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構によって停止されていた下流側の物品は下流側排出端に向って搬送される一方で、上流側にある物品は第1のストッパ機構によって停止されるので、上流側の物品が下流側の物品と共に下流側排出端になだれ込むことを防止することができる。このように、第1のストッパ及び第2のストッパを連動させて駆動することで、下流側排出端への物品の搬送タイミングを制御することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明のストッパシステムが搭載されたローラコンベアの全体構成を示す平面図である。
【図2】図1に示したローラコンベアをA方向から見た側面図である。
【図3】ローラコンベアによって搬送されるパレットの構造を示す斜視図である。
【図4】ストッパシステムの駆動部を拡大して示す平面図である。
【図5】図4に示す駆動部をB方向から見た側面図である。
【図6】ストッパシステムの第1のストッパ機構を拡大して示す平面図である。
【図7】図6に示す第1のストッパ機構をC方向から見た側面図である。
【図8】ストッパシステムの第2のストッパ機構を拡大して示す平面図である。
【図9】図8に示す第2のストッパ機構をD方向から見た側面図である。
【図10】本発明のストッパシステムの動作を時系列的に示すタイミングチャート図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0018】
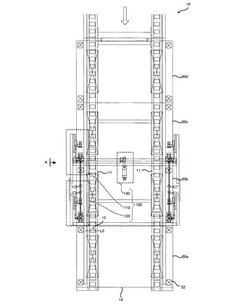
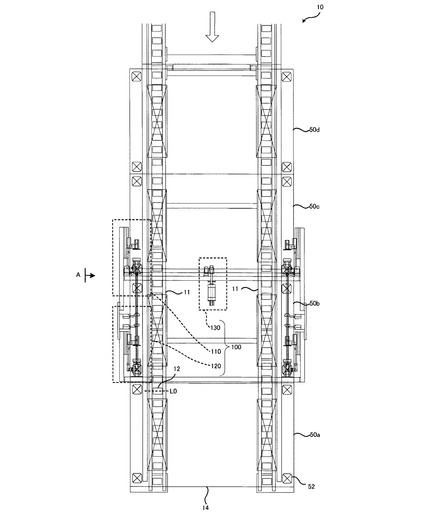
図1は、本発明のローラコンベア用ストッパシステム(以下、ストッパシステム100と称する)が搭載されたローラコンベア10の全体構成を示す平面図であり、図2は図1に示したローラコンベア10をA方向から見た側面図であり、図3はローラコンベア10によって搬送される物品たるパレット50の構造を示す斜視図である。
【0019】
ローラコンベア10は、互いに平行に延在する2本のレール11と、該2本のレール11の各々に沿って配列された複数のローラ12とを含んでなる。このようにレール11及びローラ12によって構成された搬送面には、上流側からパレット50が載せられ、下流側排出端14に向って搬送される(図1矢印を参照)。下流側排出端14に到達したパレット50は、フォークリフトなどの輸送機器によって外部に回収される。尚、以下の説明では下流側排出端14にあるパレットを符号50aで示し、その上流側にあるパレットを順に50b、50c・・・と示す。
【0020】
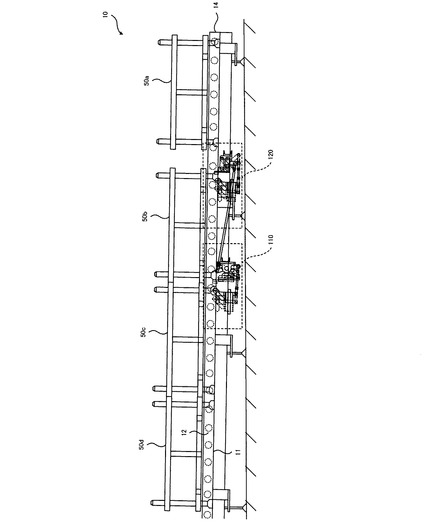
ローラコンベア10では、2本のレール11は上流側から下流側に向かって地面からの高さが次第に減少するように下り傾斜を有している。レール11に沿って設けられた複数のローラ12の各々は、レール12の延在方向に垂直な回転軸(図1では代表的に符号L0で示してある)を中心に回転自在に設けられている。上流側から投入されたパレット50は、自重によって搬送面を下流側に向かって自動的に移動し、下流側排出端14に達する。
【0021】
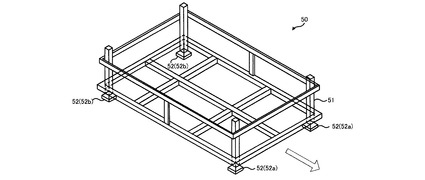
本実施例において搬送される物品であるパレット50は、電気自動車用のバッテリモジュールを積層搬送するための搬送パレットである。パレット50は、図3に示すように、平面的に見て長方形状を有しており、その四隅に支柱51が設けられた構造を有している。支柱51の下端にはパレット50を平面上に安定に設置するための足部52が設けられており、パレット50がローラコンベア10の搬送面上に置かれた際に、当該足部52が搬送面より下側につきだすように構成されている(図2参照)。パレット50は図3中の矢印で示す方向に搬送され、搬送方向前方の足部を符号52a、搬送方向後方の足部を符号52bで適宜示すこととする。
【0022】
再び図1及び図2に戻って、ストッパシステム100は第1のストッパ機構110、第2のストッパ機構120、及び駆動部130を含んでなる。尚、第1のストッパ機構110及び第2のストッパ機構120は2本のレール11の各々に設けられている。以下の説明では図1において左側に示す第1のストッパ機構110及び第2のストッパ機構120に着目して説明を行うが、もう一方のレール11状に設けられた第1のストッパ機構110及び第2のストッパ機構120もまた、同様の構成を有するものとする。
【0023】
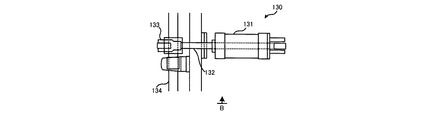
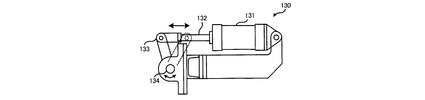
図4はストッパシステム100の駆動部130を拡大して示す平面図であり、図5は図4に示す駆動部130をB方向から見た側面図である。駆動部130は、空気圧制御回路によって駆動可能なエアーシリンダ131と、該エアーシリンダ131によって往復駆動されるピストン132と、該ピストン132にクランク機構133を介して連結された駆動軸134とを含んでなる。クランク機構133はピストン132の往復運動を駆動軸134の回転運動に変換する動力伝達機構であり、エアーシリンダ131の駆動力は回転軸134の回転運動として、第1のストッパ機構110に伝達されるよう構成されている。
【0024】
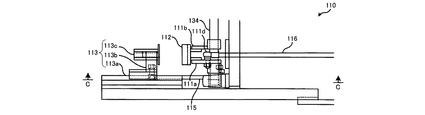
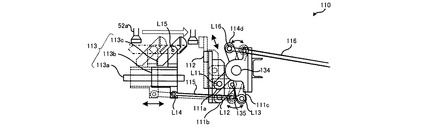
図6はストッパシステム100の第1のストッパ機構110を拡大して示す平面図であり、図7は図6に示す第1のストッパ機構110をC方向から見た側面図である。第1のストッパ機構110は、駆動軸134の回転に伴って搬送面に入退可能な第1のストッパ112と、該第1のストッパ112によって停止されたパレット50を下流側に押し出すための第1のフィーダ機構113とを含んでなる。
【0025】
第1のストッパ112は、駆動軸134に固定された回転部材111aに対して軸線L11を中心に回転可能に連結されると共に、駆動軸134の下側に駆動軸134に平行に設けられた回転軸135を中心に回転可能な回転部材111bに対して軸線L12を中心に回転可能に連結されている。これにより、第1のストッパ112は、駆動軸134が駆動部130によって回転された際に、上端部が搬送面より上側に突出してローラコンベア10上を搬送されるパレット50を停止させる停止状態(図7の点線を参照)と、上端部が搬送面より下側に退くことにより搬送面上を搬送されるパレット50を停止させない非停止状態(図7の実線を参照)とを切り替え可能に構成されている。
【0026】
また駆動軸134には回転部材111cが固定されており、該回転部材111cには軸線L13を中心に回転可能にシャフト115が連結されている。これにより、駆動軸134の回転がシャフト115の往復運動に変換され、第1のフィーダ機構113が駆動される。
【0027】
第1のフィーダ機構113は固定部113aと、該固定部113aに沿って往復運動可能な移動部113bと、該移動部113bの上部に軸線L15を中心に回転可能な回転部113cとを含んでなる。移動部113bにはシャフト115が軸線L14を中心に回転可能に連結されており、シャフト115の往復運動に連動して、移動部113及び回転部113cが固定部113aに沿って往復移動するように構成されている。
【0028】
ここで上流側(図7において左側)からパレット50が搬送されてくると、パレット50の足部52は回転部113cに衝突し、回転部113cは軸線L15を中心に延在方向が水平方向になるように(図7の一点鎖線を参照)回転し、パレット50の足部52を右側にスルーさせる。その後、回転部113cは自重により再び当初の姿勢(図8の実線を参照)に戻る。
【0029】
回転部113cから下流側にスルーされたパレット50は、第1のストッパ112が停止状態にある場合、パレット50の足部52aが第1のストッパ112に当接して停止される。これにより、上流側から投入されたパレット50は第1のストッパ112によって停止することができる。
【0030】
回転部113cは、軸線L15の左側が右側に比べて重くなるように形成されることにより定常時には斜め上方を向いており、パレット50の足部52が上流側から衝突した場合に一時的に水平方向になるように回転可能に構成されている。このように、回転部113cの回転動作は専ら自重を利用しているため、電動モータなどの駆動機構を設ける必要がなくなる。
【0031】
第1のストッパ112によって停止されたパレット50は、第1のストッパ112が非停止状態になった際に、第1のフィーダ機構113によって下流側に押し出されることにより、下流側排出端14に向かって送り出される。上述したようにローラコンベア10は傾斜を有するように形成されているものの、当該傾斜はゆるやかであるため、一度第1のストッパ112によって停止されたパレット50は、第1のストッパ112を停止状態から非停止状態に切り替えたのみでは、その場にとどまろうとする慣性力によって、直ちに下流側への移動を開始しない。そこで、本発明では、第1のフィーダ機構113によって停止したパレット50を下流側に押し出すことで、下流側排出端14への搬送を促すことができる。
【0032】
また駆動軸134には回転部材114dが固定されており、該回転部材114dの先端には、他端が第2のストッパ機構120に連結されたシャフト116が軸線L16を中心に回転可能に連結されている。このように第1のストッパ機構110と第2のストッパ機構120とをシャフト116を介して連結することにより、少ない駆動力源(即ち、駆動部130のみ)によって第1のストッパ機構110と第2のストッパ機構120の双方を駆動することができる。
【0033】
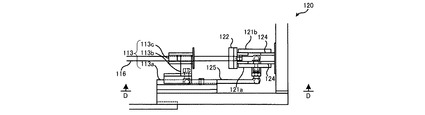
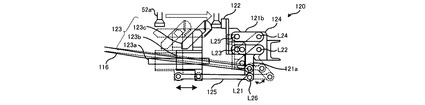
図8は、ストッパシステム100の第2のストッパ機構120を拡大して示す平面図であり、図9は図8に示す第2のストッパ機構120をD方向から見た側面図である。第2のストッパ機構120は、シャフト116の駆動に伴って搬送面に対し入退可能な第2のストッパ122と、該第2のストッパ122によって停止されたパレット50を下流側に押し出すための第2のフィーダ機構123とを含んでなる。
【0034】
第2のストッパ機構120において、シャフト116は軸線L21を中心に回転可能に回転部材121aに連結されている。該回転部材121aはレール11に対して固定された固定部材124に対して軸線L22を中心に回転可能に連結されている。これにより、シャフト116の往復運動が、回転部材121aの軸線L22を中心とする回転運動に変換される。
【0035】
第2のストッパ122は、該回転部材121aに対して軸線L23を中心に回転可能に連結されており、回転部材121aの回転に従って、上端部が搬送面より上側に突出してローラコンベア10上を搬送されるパレット50を停止させる停止状態(図9の実線を参照)と、上端部が搬送面より下側に格納されることによりローラコンベア10上を搬送されるパレット50を停止させない非停止状態(図9の点線を参照)とを切り替え可能に構成されている。尚、第2のストッパ122には、軸線L24を中心に固定部材124に回転可能に連結された回転部材121bが、軸線L25を中心に回転可能に連結されている。
【0036】
また、回転部材121aには軸線L26を中心に回転可能にシャフト125が連結されており、該シャフト125の先端には第2のフィーダ機構123が設けられている。ここで、第2のフィーダ機構123は、第1のフィーダ機構113と同様の構成を有するため、ここでは詳細な説明は割愛することとする。
【0037】
上述したように、第1のストッパ機構110と第2のストッパ機構120とはシャフト116を介して互いに連結されている。本発明では特に、第1のストッパ機構110が停止状態にある場合には第2のストッパ機構120が非停止状態にあり、第2のストッパ機構120が停止状態にある場合には第1のストッパ機構110が非停止状態にあるように構成されている。即ち、第1のストッパ機構110と第2のストッパ機構120とは、互いに逆の状態になるように構成されている。そして、第1のストッパ機構110や第2のストッパ機構120を停止状態から非停止状態に切り替えた場合には、搬送面上で停止されていたパレット50を、それぞれ第1のフィーダ機構113や第2のフィーダ機構123によって下流側に送り出すように構成している。
【0038】
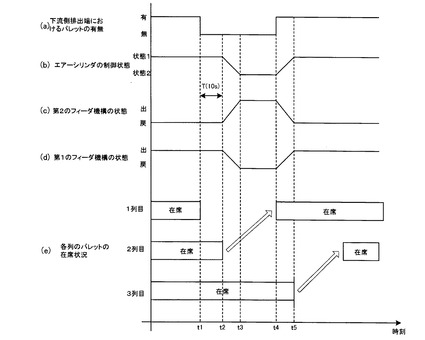
ここで、図10を参照して本発明のストッパシステム100の動作を時系列的に説明する。図10は本発明のストッパシステム100の動作を時系列的に示すタイミングチャート図である。図10(a)は下流側排出端14におけるパレット50の在席の有無を示しており、図10(b)は、駆動部130におけるエアーシリンダ131の制御状態を示しており、図10(c)は第2のフィーダ機構123の動作状態を示しており、図10(d)は第1のフィーダ機構113の動作状態を示しており、図10(e)は搬送面の各地点におけるパレット50の在席状況を個別に示している。
【0039】
まず初期状態として、図1に示すように、下流側排出端14から複数のパレット50が上流側に向けて連なるように在席している状況を想定する。ここで、搬送面のうちパレット50aが在席している位置を「一列目」、パレット50bが在席している位置を「二列目」、パレット50cが在席している位置を「三列目」と称することとする。
【0040】
図10(b)に示すように、エアーシリンダ131は状態1と状態2という2つの状態をとる。ここで状態1は、第1のフィーダ機構113が突出している状態(即ち、回転部113cが下流側に移動した状態)にあり、且つ、第2のフィーダ機構123が戻った状態(即ち、回転部123cが上流側に移動した状態)にある状態を意味する。逆に状態2は、第2のフィーダ機構123が突出している状態(即ち、回転部123cが下流側に移動した状態)にあり、第1のフィーダ機構113が戻った状態(即ち、回転部113cが上流側に移動した状態)にある状態を意味する。
【0041】
下流側排出端14にあるパレット50aがフォークリフトなどの輸送機器によって外部に排出されると(時刻t1)、当該排出されたタイミングから所定期間T(本実施例では10秒とする)が経過した後に、エアーシリンダ131の制御状態を状態1から状態2に切り替える(時刻t2)。ここで、所定期間のカウントは、エアーシリンダ131の動作制御を行うための空気圧回路に各種リレータイマなど組み込むことで実現するとよい。
【0042】
エアーシリンダ131の制御状態が状態1から状態2に切り替わると、第2のストッパ機構120が停止状態から非停止状態に切り替わり、二列目に在席していたパレット50bは一列目(即ち下流側排出端14)に向って移動を開始する(時刻t3)。このとき、第2のフィーダ機構123がパレット50bの足部52aを下流側に押し出すことによって、パレット50bの下流側に送り出す。これと同時に、第1のストッパ機構120が非停止状態から停止状態に切り替わり、三列目にあるパレット50cがパレット50bと共に下流側排出端14になだれ込まないように、パレット50cを停止させる。
【0043】
その後、エアーシリンダ131の制御状態が状態2から状態1に再び切り替わることにより、第1のストッパ機構110が停止状態から非停止状態に切り替わり、三列目にあったパレット50cは二列目に向って移動を開始する(時刻t4)。このとき、第1のフィーダ機構113がパレット50cの足部52aを下流側に押し出すことによって、パレット50cの二列目に送り出す。これと同時に第2のストッパ機構120が非停止状態が停止状態に切り替わり、三列目にあるパレット50cが目的の二列目を通り越して下流側排出端14になだれ込まないように、パレット50cを停止させる。
【0044】
尚、初期状態において下流側排出端14にパレット50が在席していない場合には、下流側排出端14に設けられた先頭在席リミットスイッチ(図不示)を動作させることによって、上流側にある搬送パレット50を下流側排出端14に移動させるとよい。また、このような下流側排出端14における搬送パレット50の在席の有無はセンサによる検知又は作業者による目視によって検知してもよい。
【0045】
以上説明したように、本実施例のストッパシステム100によれば、下流側にある第2のストッパ機構120を停止状態から非停止状態に切り替えた場合、一方の上流側にある第1のストッパ機構110は非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構120によって停止されていた下流側のパレット50は下流側排出端14に向って搬送される一方で、上流側にあるパレットは第1のストッパ機構110によって停止され、下流側排出端14に不意になだれ込むことが防止される。このように、下り傾斜を有する搬送面上に複数のパレット50が在席している場合であっても、第1のストッパ機構110及び第2のストッパ機構120を連動させて駆動することで、下流側排出端14の搬送タイミングを的確に制御することができる。
【産業上の利用可能性】
【0046】
本発明は、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアに利用することが可能である。
【符号の説明】
【0047】
10 ローラコンベア
11 レール
12 ローラ
14 下流側排出端
50 搬送パレット
52 足部
100 ストッパシステム
110 第1のストッパ機構
112 第1のストッパ
113 第1のフィーダ機構
116 シャフト
120 第2のストッパ機構
122 第2のストッパ
123 第2のフィーダ機構
130 駆動部
134 駆動軸
【技術分野】
【0001】
本発明は、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムの技術分野に関する。
【背景技術】
【0002】
物品の搬送において、下り傾斜を有するレール上に複数の回転自在なローラが配設してなるローラコンベアが広く利用されている。この種のローラコンベアでは、当該下り傾斜に沿って物品が自重により搬送されるが、搬送途中の物品を所定位置で停止させるためのストッパ機構が設けられる場合がある。
【0003】
例えば特許文献1には、ローラコンベアの搬送面に対し略垂直方向に入退自在なストッパにより、搬送中の物品を搬送面上で停止可能なストッパ機構が開示されている。また特許文献2では、このようなストッパ機構の構造を工夫することにより、ローラコンベアの下側にコンパクトに配置可能なストッパ機構が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−108931号公報
【特許文献2】特開2000−72246号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
下り傾斜に沿って物品が搬送されるローラコンベアでは自重によって物品の搬送が行われるため、連続的に物品が投入された場合、ローラコンベアの下流側排出端において、投入された物品同士が玉突き状に衝突してしまうという問題がある。この問題に対する解決手段として、上述したストッパ機構を利用して、下流側排出端への物品の搬送タイミングを調整することが考えられる。このようにストッパ機構を利用する場合、上流側から次々に搬送されてくる物品を下流側排出端に一つずつ順に送り出す必要がある。即ち、一の物品を下流側排出端に送り出す際に、上流側にある他の物品が当該一の物品と共に下流側排出端になだれ込まないように停止させておく必要がある。このような動作を実現するためには、ローラコンベアに複数のストッパ機構を設ける必要があるが、従来のストッパ機構をそのまま複数設けると構造が複雑化してしまい、製造コストやメンテナンスに要する手間が増大してしまうという問題がある。
【0006】
本発明は、上述した問題点に鑑みなされたものであり、ローラコンベアに複数のストッパ機構をシンプルな構成で設けることにより、連続的に投入される物品を適切なタイミングで下流側排出端に排出可能なローラコンベア用ストッパシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のローラコンベア用ストッパシステムは上記課題を解決するために、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムであって、前記搬送面より下側に設けられた駆動軸を回転駆動させる駆動部と、前記駆動軸の回転駆動に伴って、第1のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置で停止させる停止状態と、前記第1のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第1のストッパ機構と、前記駆動軸の回転駆動に伴って、第2のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置より下流側にある第2の停止位置で停止させる停止状態と、前記第2のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第2のストッパ機構とを備え、前記第1のストッパ機構が前記停止状態と前記非停止状態の一方の状態をとるとき、前記第2のストッパ機構は他方の状態をとるように構成し、前記第2のストッパが前記搬送面の下側に退いた際に、前記第2の停止位置に停止された物品が前記下流側排出端に搬送されると共に、前記第1のストッパが前記搬送面の上側に突出することによって前記第1の停止位置より上流側にある物品を前記第1の停止位置で停止させることを特徴とする。
【0008】
本発明によれば、下流側にある第2のストッパ機構を停止状態から非停止状態に切り替えた場合、上流側にある第1のストッパ機構は逆に非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構によって停止されていた下流側の物品は下流側排出端に向って搬送される一方で、上流側にある物品は第1のストッパ機構によって停止されるので、上流側の物品が下流側の物品と共に下流側排出端になだれ込むことを防止することができる。このように、第1のストッパ及び第2のストッパを連動させて駆動することで、下流側排出端への物品の搬送タイミングを制御することが可能となる。
【0009】
好ましくは、前記第1のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第1のストッパ機構の動作に連動して、前記第1の停止位置で停止された物品を下流側に押し出す第1のフィーダ機構と、前記第2のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第2のストッパ機構の動作に連動して、前記第2の停止位置で停止された物品を下流側に押し出す第2のフィーダ機構とを備えるとよい。
【0010】
この場合、第1のストッパ機構及び第2のストッパ機構によって停止された物品を、それぞれ第1及び第2のフィーダ機構によって下流側に押し出すことができるので、一度ローラコンベア上で停止した物品に初期動力を与え、下流側への搬送をスムーズに促すことができる。本発明のローラコンベア用ストッパシステムが搭載されるローラコンベアは下り傾斜を有するため、基本的に、物品は自重によって下流側に搬送されるが、該下り傾斜が緩やかな場合、搬送面上で一旦停止させた物品は慣性力によってその場に留まろうとするため、搬送が滞ってしまうおそれがある。本発明ではこのような場合であっても、フィーダ機構によって搬送面上で停止された物品に対して初期動力を与えることができるので、搬送を滞らせることなく、スムーズな搬送を行うことができる。特に、このような第1及び第2のフィーダ機構の動作は、それぞれ第1及び第2のストッパ機構の動作に連動して行われるため、駆動力源を新たに付加することなく、シンプルな構成で実現することができる。
【0011】
好ましくは、前記第1のフィーダ機構及び前記第2のフィーダ機構は、前記駆動軸の回転駆動を往復駆動に変換可能なクランク機構を介して、前記物品の搬送方向に沿って往復運動可能に構成されているとよい。
【0012】
この場合、クランク機構を用いることによって回転軸の回転駆動を往復駆動に変換できるので、回転軸の回転駆動力を利用して第1及び第2のフィーダ機構を駆動することができる。これにより、第1及び第2のフィーダ機構の駆動力源を別途設ける必要がなくなるので、ストッパ機構を構成する部品数を抑制し、よりシンプルな構成を実現することができる。
【0013】
好ましくは、前記駆動部は、前記下流側排出端から前記物品が外部に排出された時点から所定の期間が経過した後に、前記第2のストッパ機構を停止状態から非停止状態に切り替えるように前記駆動軸を回転駆動するとよい。
【0014】
この場合、例えば下流側排出端からフォークリフトなどの輸送機によって物品を外部に搬送された場合、所定の期間が経過した後に、次の物品が上流側から下流側排出端に搬送されるので、下流側排出端からの物品を回収した際に、上流側から他の物品が玉突き的になだれ込むことを防止することができる。
【発明の効果】
【0015】
本発明によれば、下流側にある第2のストッパ機構を停止状態から非停止状態に切り替えた場合、上流側にある第1のストッパ機構は逆に非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構によって停止されていた下流側の物品は下流側排出端に向って搬送される一方で、上流側にある物品は第1のストッパ機構によって停止されるので、上流側の物品が下流側の物品と共に下流側排出端になだれ込むことを防止することができる。このように、第1のストッパ及び第2のストッパを連動させて駆動することで、下流側排出端への物品の搬送タイミングを制御することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明のストッパシステムが搭載されたローラコンベアの全体構成を示す平面図である。
【図2】図1に示したローラコンベアをA方向から見た側面図である。
【図3】ローラコンベアによって搬送されるパレットの構造を示す斜視図である。
【図4】ストッパシステムの駆動部を拡大して示す平面図である。
【図5】図4に示す駆動部をB方向から見た側面図である。
【図6】ストッパシステムの第1のストッパ機構を拡大して示す平面図である。
【図7】図6に示す第1のストッパ機構をC方向から見た側面図である。
【図8】ストッパシステムの第2のストッパ機構を拡大して示す平面図である。
【図9】図8に示す第2のストッパ機構をD方向から見た側面図である。
【図10】本発明のストッパシステムの動作を時系列的に示すタイミングチャート図である。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【0018】
図1は、本発明のローラコンベア用ストッパシステム(以下、ストッパシステム100と称する)が搭載されたローラコンベア10の全体構成を示す平面図であり、図2は図1に示したローラコンベア10をA方向から見た側面図であり、図3はローラコンベア10によって搬送される物品たるパレット50の構造を示す斜視図である。
【0019】
ローラコンベア10は、互いに平行に延在する2本のレール11と、該2本のレール11の各々に沿って配列された複数のローラ12とを含んでなる。このようにレール11及びローラ12によって構成された搬送面には、上流側からパレット50が載せられ、下流側排出端14に向って搬送される(図1矢印を参照)。下流側排出端14に到達したパレット50は、フォークリフトなどの輸送機器によって外部に回収される。尚、以下の説明では下流側排出端14にあるパレットを符号50aで示し、その上流側にあるパレットを順に50b、50c・・・と示す。
【0020】
ローラコンベア10では、2本のレール11は上流側から下流側に向かって地面からの高さが次第に減少するように下り傾斜を有している。レール11に沿って設けられた複数のローラ12の各々は、レール12の延在方向に垂直な回転軸(図1では代表的に符号L0で示してある)を中心に回転自在に設けられている。上流側から投入されたパレット50は、自重によって搬送面を下流側に向かって自動的に移動し、下流側排出端14に達する。
【0021】
本実施例において搬送される物品であるパレット50は、電気自動車用のバッテリモジュールを積層搬送するための搬送パレットである。パレット50は、図3に示すように、平面的に見て長方形状を有しており、その四隅に支柱51が設けられた構造を有している。支柱51の下端にはパレット50を平面上に安定に設置するための足部52が設けられており、パレット50がローラコンベア10の搬送面上に置かれた際に、当該足部52が搬送面より下側につきだすように構成されている(図2参照)。パレット50は図3中の矢印で示す方向に搬送され、搬送方向前方の足部を符号52a、搬送方向後方の足部を符号52bで適宜示すこととする。
【0022】
再び図1及び図2に戻って、ストッパシステム100は第1のストッパ機構110、第2のストッパ機構120、及び駆動部130を含んでなる。尚、第1のストッパ機構110及び第2のストッパ機構120は2本のレール11の各々に設けられている。以下の説明では図1において左側に示す第1のストッパ機構110及び第2のストッパ機構120に着目して説明を行うが、もう一方のレール11状に設けられた第1のストッパ機構110及び第2のストッパ機構120もまた、同様の構成を有するものとする。
【0023】
図4はストッパシステム100の駆動部130を拡大して示す平面図であり、図5は図4に示す駆動部130をB方向から見た側面図である。駆動部130は、空気圧制御回路によって駆動可能なエアーシリンダ131と、該エアーシリンダ131によって往復駆動されるピストン132と、該ピストン132にクランク機構133を介して連結された駆動軸134とを含んでなる。クランク機構133はピストン132の往復運動を駆動軸134の回転運動に変換する動力伝達機構であり、エアーシリンダ131の駆動力は回転軸134の回転運動として、第1のストッパ機構110に伝達されるよう構成されている。
【0024】
図6はストッパシステム100の第1のストッパ機構110を拡大して示す平面図であり、図7は図6に示す第1のストッパ機構110をC方向から見た側面図である。第1のストッパ機構110は、駆動軸134の回転に伴って搬送面に入退可能な第1のストッパ112と、該第1のストッパ112によって停止されたパレット50を下流側に押し出すための第1のフィーダ機構113とを含んでなる。
【0025】
第1のストッパ112は、駆動軸134に固定された回転部材111aに対して軸線L11を中心に回転可能に連結されると共に、駆動軸134の下側に駆動軸134に平行に設けられた回転軸135を中心に回転可能な回転部材111bに対して軸線L12を中心に回転可能に連結されている。これにより、第1のストッパ112は、駆動軸134が駆動部130によって回転された際に、上端部が搬送面より上側に突出してローラコンベア10上を搬送されるパレット50を停止させる停止状態(図7の点線を参照)と、上端部が搬送面より下側に退くことにより搬送面上を搬送されるパレット50を停止させない非停止状態(図7の実線を参照)とを切り替え可能に構成されている。
【0026】
また駆動軸134には回転部材111cが固定されており、該回転部材111cには軸線L13を中心に回転可能にシャフト115が連結されている。これにより、駆動軸134の回転がシャフト115の往復運動に変換され、第1のフィーダ機構113が駆動される。
【0027】
第1のフィーダ機構113は固定部113aと、該固定部113aに沿って往復運動可能な移動部113bと、該移動部113bの上部に軸線L15を中心に回転可能な回転部113cとを含んでなる。移動部113bにはシャフト115が軸線L14を中心に回転可能に連結されており、シャフト115の往復運動に連動して、移動部113及び回転部113cが固定部113aに沿って往復移動するように構成されている。
【0028】
ここで上流側(図7において左側)からパレット50が搬送されてくると、パレット50の足部52は回転部113cに衝突し、回転部113cは軸線L15を中心に延在方向が水平方向になるように(図7の一点鎖線を参照)回転し、パレット50の足部52を右側にスルーさせる。その後、回転部113cは自重により再び当初の姿勢(図8の実線を参照)に戻る。
【0029】
回転部113cから下流側にスルーされたパレット50は、第1のストッパ112が停止状態にある場合、パレット50の足部52aが第1のストッパ112に当接して停止される。これにより、上流側から投入されたパレット50は第1のストッパ112によって停止することができる。
【0030】
回転部113cは、軸線L15の左側が右側に比べて重くなるように形成されることにより定常時には斜め上方を向いており、パレット50の足部52が上流側から衝突した場合に一時的に水平方向になるように回転可能に構成されている。このように、回転部113cの回転動作は専ら自重を利用しているため、電動モータなどの駆動機構を設ける必要がなくなる。
【0031】
第1のストッパ112によって停止されたパレット50は、第1のストッパ112が非停止状態になった際に、第1のフィーダ機構113によって下流側に押し出されることにより、下流側排出端14に向かって送り出される。上述したようにローラコンベア10は傾斜を有するように形成されているものの、当該傾斜はゆるやかであるため、一度第1のストッパ112によって停止されたパレット50は、第1のストッパ112を停止状態から非停止状態に切り替えたのみでは、その場にとどまろうとする慣性力によって、直ちに下流側への移動を開始しない。そこで、本発明では、第1のフィーダ機構113によって停止したパレット50を下流側に押し出すことで、下流側排出端14への搬送を促すことができる。
【0032】
また駆動軸134には回転部材114dが固定されており、該回転部材114dの先端には、他端が第2のストッパ機構120に連結されたシャフト116が軸線L16を中心に回転可能に連結されている。このように第1のストッパ機構110と第2のストッパ機構120とをシャフト116を介して連結することにより、少ない駆動力源(即ち、駆動部130のみ)によって第1のストッパ機構110と第2のストッパ機構120の双方を駆動することができる。
【0033】
図8は、ストッパシステム100の第2のストッパ機構120を拡大して示す平面図であり、図9は図8に示す第2のストッパ機構120をD方向から見た側面図である。第2のストッパ機構120は、シャフト116の駆動に伴って搬送面に対し入退可能な第2のストッパ122と、該第2のストッパ122によって停止されたパレット50を下流側に押し出すための第2のフィーダ機構123とを含んでなる。
【0034】
第2のストッパ機構120において、シャフト116は軸線L21を中心に回転可能に回転部材121aに連結されている。該回転部材121aはレール11に対して固定された固定部材124に対して軸線L22を中心に回転可能に連結されている。これにより、シャフト116の往復運動が、回転部材121aの軸線L22を中心とする回転運動に変換される。
【0035】
第2のストッパ122は、該回転部材121aに対して軸線L23を中心に回転可能に連結されており、回転部材121aの回転に従って、上端部が搬送面より上側に突出してローラコンベア10上を搬送されるパレット50を停止させる停止状態(図9の実線を参照)と、上端部が搬送面より下側に格納されることによりローラコンベア10上を搬送されるパレット50を停止させない非停止状態(図9の点線を参照)とを切り替え可能に構成されている。尚、第2のストッパ122には、軸線L24を中心に固定部材124に回転可能に連結された回転部材121bが、軸線L25を中心に回転可能に連結されている。
【0036】
また、回転部材121aには軸線L26を中心に回転可能にシャフト125が連結されており、該シャフト125の先端には第2のフィーダ機構123が設けられている。ここで、第2のフィーダ機構123は、第1のフィーダ機構113と同様の構成を有するため、ここでは詳細な説明は割愛することとする。
【0037】
上述したように、第1のストッパ機構110と第2のストッパ機構120とはシャフト116を介して互いに連結されている。本発明では特に、第1のストッパ機構110が停止状態にある場合には第2のストッパ機構120が非停止状態にあり、第2のストッパ機構120が停止状態にある場合には第1のストッパ機構110が非停止状態にあるように構成されている。即ち、第1のストッパ機構110と第2のストッパ機構120とは、互いに逆の状態になるように構成されている。そして、第1のストッパ機構110や第2のストッパ機構120を停止状態から非停止状態に切り替えた場合には、搬送面上で停止されていたパレット50を、それぞれ第1のフィーダ機構113や第2のフィーダ機構123によって下流側に送り出すように構成している。
【0038】
ここで、図10を参照して本発明のストッパシステム100の動作を時系列的に説明する。図10は本発明のストッパシステム100の動作を時系列的に示すタイミングチャート図である。図10(a)は下流側排出端14におけるパレット50の在席の有無を示しており、図10(b)は、駆動部130におけるエアーシリンダ131の制御状態を示しており、図10(c)は第2のフィーダ機構123の動作状態を示しており、図10(d)は第1のフィーダ機構113の動作状態を示しており、図10(e)は搬送面の各地点におけるパレット50の在席状況を個別に示している。
【0039】
まず初期状態として、図1に示すように、下流側排出端14から複数のパレット50が上流側に向けて連なるように在席している状況を想定する。ここで、搬送面のうちパレット50aが在席している位置を「一列目」、パレット50bが在席している位置を「二列目」、パレット50cが在席している位置を「三列目」と称することとする。
【0040】
図10(b)に示すように、エアーシリンダ131は状態1と状態2という2つの状態をとる。ここで状態1は、第1のフィーダ機構113が突出している状態(即ち、回転部113cが下流側に移動した状態)にあり、且つ、第2のフィーダ機構123が戻った状態(即ち、回転部123cが上流側に移動した状態)にある状態を意味する。逆に状態2は、第2のフィーダ機構123が突出している状態(即ち、回転部123cが下流側に移動した状態)にあり、第1のフィーダ機構113が戻った状態(即ち、回転部113cが上流側に移動した状態)にある状態を意味する。
【0041】
下流側排出端14にあるパレット50aがフォークリフトなどの輸送機器によって外部に排出されると(時刻t1)、当該排出されたタイミングから所定期間T(本実施例では10秒とする)が経過した後に、エアーシリンダ131の制御状態を状態1から状態2に切り替える(時刻t2)。ここで、所定期間のカウントは、エアーシリンダ131の動作制御を行うための空気圧回路に各種リレータイマなど組み込むことで実現するとよい。
【0042】
エアーシリンダ131の制御状態が状態1から状態2に切り替わると、第2のストッパ機構120が停止状態から非停止状態に切り替わり、二列目に在席していたパレット50bは一列目(即ち下流側排出端14)に向って移動を開始する(時刻t3)。このとき、第2のフィーダ機構123がパレット50bの足部52aを下流側に押し出すことによって、パレット50bの下流側に送り出す。これと同時に、第1のストッパ機構120が非停止状態から停止状態に切り替わり、三列目にあるパレット50cがパレット50bと共に下流側排出端14になだれ込まないように、パレット50cを停止させる。
【0043】
その後、エアーシリンダ131の制御状態が状態2から状態1に再び切り替わることにより、第1のストッパ機構110が停止状態から非停止状態に切り替わり、三列目にあったパレット50cは二列目に向って移動を開始する(時刻t4)。このとき、第1のフィーダ機構113がパレット50cの足部52aを下流側に押し出すことによって、パレット50cの二列目に送り出す。これと同時に第2のストッパ機構120が非停止状態が停止状態に切り替わり、三列目にあるパレット50cが目的の二列目を通り越して下流側排出端14になだれ込まないように、パレット50cを停止させる。
【0044】
尚、初期状態において下流側排出端14にパレット50が在席していない場合には、下流側排出端14に設けられた先頭在席リミットスイッチ(図不示)を動作させることによって、上流側にある搬送パレット50を下流側排出端14に移動させるとよい。また、このような下流側排出端14における搬送パレット50の在席の有無はセンサによる検知又は作業者による目視によって検知してもよい。
【0045】
以上説明したように、本実施例のストッパシステム100によれば、下流側にある第2のストッパ機構120を停止状態から非停止状態に切り替えた場合、一方の上流側にある第1のストッパ機構110は非停止状態から停止状態に切り替えられる。これにより、第2のストッパ機構120によって停止されていた下流側のパレット50は下流側排出端14に向って搬送される一方で、上流側にあるパレットは第1のストッパ機構110によって停止され、下流側排出端14に不意になだれ込むことが防止される。このように、下り傾斜を有する搬送面上に複数のパレット50が在席している場合であっても、第1のストッパ機構110及び第2のストッパ機構120を連動させて駆動することで、下流側排出端14の搬送タイミングを的確に制御することができる。
【産業上の利用可能性】
【0046】
本発明は、上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアに利用することが可能である。
【符号の説明】
【0047】
10 ローラコンベア
11 レール
12 ローラ
14 下流側排出端
50 搬送パレット
52 足部
100 ストッパシステム
110 第1のストッパ機構
112 第1のストッパ
113 第1のフィーダ機構
116 シャフト
120 第2のストッパ機構
122 第2のストッパ
123 第2のフィーダ機構
130 駆動部
134 駆動軸
【特許請求の範囲】
【請求項1】
上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムであって、
前記搬送面より下側に設けられた駆動軸を回転駆動させる駆動部と、
前記駆動軸の回転駆動に伴って、第1のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置で停止させる停止状態と、前記第1のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第1のストッパ機構と、
前記駆動軸の回転駆動に伴って、第2のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置より下流側にある第2の停止位置で停止させる停止状態と、前記第2のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第2のストッパ機構と
を備え、
前記第1のストッパ機構が前記停止状態と前記非停止状態の一方の状態をとるとき、前記第2のストッパ機構は他方の状態をとるように構成し、
前記第2のストッパが前記搬送面の下側に退いた際に、前記第2の停止位置に停止された物品が前記下流側排出端に搬送されると共に、前記第1のストッパが前記搬送面の上側に突出することによって前記第1の停止位置より上流側にある物品を前記第1の停止位置で停止させることを特徴とするローラコンベア用ストッパシステム。
【請求項2】
前記第1のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第1のストッパ機構の動作に連動して、前記第1の停止位置で停止された物品を下流側に押し出す第1のフィーダ機構と、
前記第2のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第2のストッパ機構の動作に連動して、前記第2の停止位置で停止された物品を下流側に押し出す第2のフィーダ機構と
を備えたことを特徴とする請求項1に記載のローラコンベア用ストッパシステム。
【請求項3】
前記第1のフィーダ機構及び前記第2のフィーダ機構は、前記駆動軸の回転駆動を往復駆動に変換可能なクランク機構を介して、前記物品の搬送方向に沿って往復運動可能に構成されていることを特徴とする請求項2に記載のローラコンベア用ストッパシステム。
【請求項4】
前記駆動部は、前記下流側排出端から前記物品が外部に排出された時点から所定の期間が経過した後に、前記第2のストッパ機構を停止状態から非停止状態に切り替えるように前記駆動軸を回転駆動することを特徴とする請求項1から3のいずれか一項に記載のローラコンベア用ストッパシステム。
【請求項1】
上流側投入端から下流側排出端に向かって下り傾斜を有するように形成されたレールに沿って回転自在な複数のローラが配設されてなるローラコンベアにおいて、搬送される物品を搬送面上で停止させるローラコンベア用ストッパシステムであって、
前記搬送面より下側に設けられた駆動軸を回転駆動させる駆動部と、
前記駆動軸の回転駆動に伴って、第1のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置で停止させる停止状態と、前記第1のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第1のストッパ機構と、
前記駆動軸の回転駆動に伴って、第2のストッパが前記搬送面より上側に突出して前記搬送される物品を第1の停止位置より下流側にある第2の停止位置で停止させる停止状態と、前記第2のストッパが前記搬送面より下側に退くことにより前記搬送される物品を停止させない非停止状態とを切り替え可能な第2のストッパ機構と
を備え、
前記第1のストッパ機構が前記停止状態と前記非停止状態の一方の状態をとるとき、前記第2のストッパ機構は他方の状態をとるように構成し、
前記第2のストッパが前記搬送面の下側に退いた際に、前記第2の停止位置に停止された物品が前記下流側排出端に搬送されると共に、前記第1のストッパが前記搬送面の上側に突出することによって前記第1の停止位置より上流側にある物品を前記第1の停止位置で停止させることを特徴とするローラコンベア用ストッパシステム。
【請求項2】
前記第1のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第1のストッパ機構の動作に連動して、前記第1の停止位置で停止された物品を下流側に押し出す第1のフィーダ機構と、
前記第2のストッパ機構が停止状態から非停止状態に切り替えられた際に、前記第2のストッパ機構の動作に連動して、前記第2の停止位置で停止された物品を下流側に押し出す第2のフィーダ機構と
を備えたことを特徴とする請求項1に記載のローラコンベア用ストッパシステム。
【請求項3】
前記第1のフィーダ機構及び前記第2のフィーダ機構は、前記駆動軸の回転駆動を往復駆動に変換可能なクランク機構を介して、前記物品の搬送方向に沿って往復運動可能に構成されていることを特徴とする請求項2に記載のローラコンベア用ストッパシステム。
【請求項4】
前記駆動部は、前記下流側排出端から前記物品が外部に排出された時点から所定の期間が経過した後に、前記第2のストッパ機構を停止状態から非停止状態に切り替えるように前記駆動軸を回転駆動することを特徴とする請求項1から3のいずれか一項に記載のローラコンベア用ストッパシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−76889(P2012−76889A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−224147(P2010−224147)
【出願日】平成22年10月1日(2010.10.1)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年10月1日(2010.10.1)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]