
ローレンツモータ
【課題】ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供する。
【解決手段】ステータとロータとを対向配置し、ステータとロータとの間に作用するローレンツ力によってロータがステータに対して回転するよう構成されたローレンツモータにおいて、ロータは、ステータとの対向面に多極着磁したロータマグネットを有し、ステータは、交番電流を流されることによってロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによってロータとステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、傾き・位置制御用巻線は、ロータに多極着磁した所定の磁極と、所定の磁極と隣接する異なる極の磁極との境界における多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じる。
【解決手段】ステータとロータとを対向配置し、ステータとロータとの間に作用するローレンツ力によってロータがステータに対して回転するよう構成されたローレンツモータにおいて、ロータは、ステータとの対向面に多極着磁したロータマグネットを有し、ステータは、交番電流を流されることによってロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによってロータとステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、傾き・位置制御用巻線は、ロータに多極着磁した所定の磁極と、所定の磁極と隣接する異なる極の磁極との境界における多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はローレンツモータに関し、詳しくは、傾き及び位置制御が可能なローレンツモータに関する。
【背景技術】
【0002】
従来、ロータとステータとがボールベアリングなどの軸受けを介して接触して連結される一般的なモータとは別に、ロータとステータとが接することなく、磁気軸受構造または動圧軸受構造でロータとステータとの間のスペースを一定に保ちながら回転するローレンツモータが知られている(特許文献1、特許文献2参照)。
【0003】
このようなローレンツモータの磁気軸受構造においては、ロータを回転させる回転用の巻線のほかに、ロータとステータとの間のスペースを一定に保つために、ロータとステータとの傾きを制御する傾き及び位置制御用の巻線を設けるようにしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−78389号公報
【特許文献2】特開2002−325490号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来のローレンツモータにおいては、ロータとステータとの傾き・位置を制御する機構を、ロータを回転させる機構のほかに設けており、その傾き・位置制御機構を小型化することが困難であったため、傾き・位置制御機構を収容するスペースがモータに必要であり、モータを小型化する際の障害となっていた。
【0006】
本発明は、上記課題に鑑みてなされたものであり、ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、ステータとロータとを有し、前記ステータと前記ロータとを対向配置し、前記ステータと前記ロータとの間に作用するローレンツ力によって前記ロータが前記ステータに対して回転するよう構成されたローレンツモータにおいて、前記ロータは、前記ステータとの対向面に多極着磁したロータマグネットを有し、前記ステータは、交番電流を流されることによって前記ロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによって前記ロータと前記ステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、前記傾き制御用巻線は、前記ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるものであることを特徴とする。
【発明の効果】
【0008】
本発明によれば、ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供することができる。
【0009】
すなわち、本発明では、傾き・位置制御用巻線は、ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるので、回転用巻線と干渉せずに空きスペースに収容可能であり、傾き・位置制御機構を小型化することが可能である。
【0010】
また本発明は、薄いスペース(ロータとステータ巻線との間の空間)に傾き・位置制御機構を構成することができるので、能動的傾き・位置制御が可能なデバイスの薄型化に貢献することができる。
【0011】
また本発明は、傾き・位置制御にローレンツ力を利用しているため、浮上ロータに対して巻線で発生する余分な力を加えることがなく、他のロータ姿勢に影響を与えることがない。
【0012】
また本発明は、時分割で傾き・位置制御コイルを回転用制御コイルとして使用することで、傾き・位置制御用巻線も、ロータの回転に利用することができ、これにより従来の2倍のトルクを発生することも可能である。
【図面の簡単な説明】
【0013】
【図1】本発明によるローレンツモータの一実施の形態を示す概略斜視図である。
【図2】図1に示したステータ3を構成する巻線を説明する図である。
【図3】モータ1の回転原理を説明する図であって、ロータマグネット4と巻線6とを組み合わせた状態を示す平面図である。
【図4】モータ1の回転原理を説明する図であって、電流を流した状態での、図3の破線Cで囲んだ箇所を拡大して示す図である。
【図5】モータ1の回転原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線6とを組み合わせた状態を示す側断面図である。
【図6】交番検知型ホールICの動作原理の概略図でする。
【図7】モータ1の傾き制御原理を説明する図であって、ロータマグネット4と巻線5とを組み合わせた状態を示す平面図である。
【図8】モータ1の傾き制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【図9】モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、磁極の境界上の巻線5を模式的に拡大して示す斜視図である。
【図10】モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線5とを組み合わせた状態を示す側断面図である。
【図11】ロータ2とステータ3との傾きの検出について説明する図である。
【図12】巻線5と巻線6との電気角のズレを示す平面図である。
【図13】モータ1の制御法1を説明する図であり、(a)は巻線5と巻線6とを組み合わせた斜視図であり、(b)は巻線5と巻線6とを組み合わせた平面図であり、(c)は巻線5および巻線6それぞれのコイル番号を示す平面図である。
【図14】制御法1の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【図15】16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【図16】制御法2の場合の2組の巻線それぞれの接続を示す結線図であり、(a)は各コイルの接続を示す図であり、(b)は、一方の巻線を回転用とし他方の巻線を傾き制御用とした場合の結線を示す図であり、(c)一方の巻線を傾き制御用とし他方の巻線を回転用とした場合の結線を示す図である。
【図17】16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【図18】モータ1の制御システムの構成を示すブロック図である。
【図19】モータ1の軸方向位置制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【図20】図19の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【図21】図19の場合の制御システムの構成を示すブロック図である。
【図22】本発明によるローレンツモータ1の回転トルクを測定した実験結果を示すグラフであり、(a)は制御法1の実験結果であり、(b)は制御法2の実験結果である。
【図23】本発明によるローレンツモータ1の傾き制御トルクを測定した実験結果を示すグラフである。
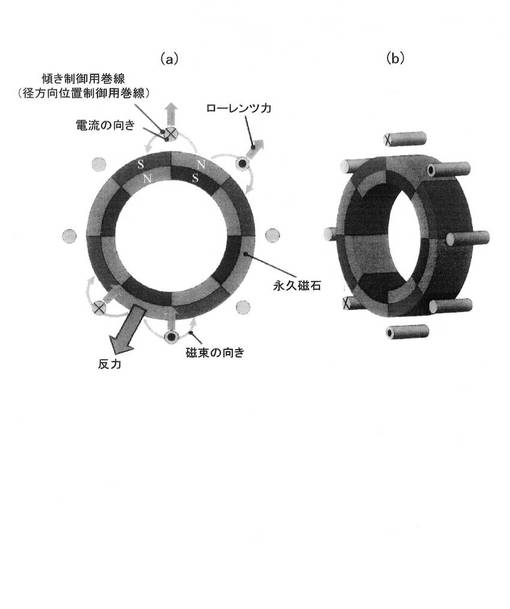
【図24】本発明によるローレンツモータの形状の別の例を示す図であり、(a)は側面図であり、(b)は斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
【0015】
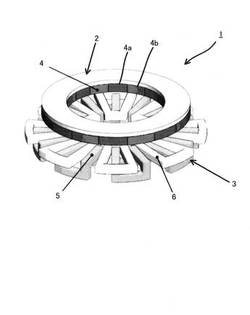
図1は、本発明によるローレンツモータの一実施の形態を示す概略斜視図である。
【0016】
本実施の形態のローレンツモータ1は、ロータ2とステータ3とを有して構成される。ロータ2とステータ3とは所定面同士が対向するように配置され、このときのロータ2とステータ3との傾き、ロータ2とステータ3との間隔(ロータ2の軸方向位置)は、後述の傾き・位置制御によって制御される。
【0017】
ロータ2は、ステータ3との対向面に多極着磁したロータマグネット4を有する。本実施の形態では、ロータマグネット4は、16極の表面着磁型永久磁石により構成されている。すなわち、ロータマグネット4は、S極部4aとN極部4bとを交互に設け、1周の間にS極部4aを8箇所、N極部4bを8箇所、設けている。
【0018】
ステータ3は、それぞれ別の導線で構成される巻線5および巻線6を有する。
【0019】
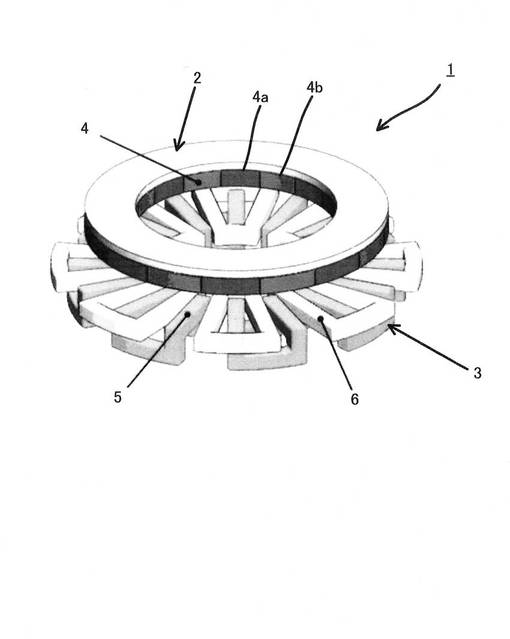
図2は、図1に示したステータ3を構成する巻線を説明する図である。
【0020】
本実施の形態では、導線7としてポリエステル銅線を用いており、導線7を巻回して巻線5を形成し、また導線7を巻回して巻線6を形成する。巻線5および巻線6それぞれの結線状態は後述する。
【0021】
巻線6は、ロータマグネット4との対向面と平行になるように導線7をリング状に巻回して成る。
【0022】
一方、巻線5は、ロータマグネット4との対向面と平行な箇所と、ほぼ垂直な箇所とを導線7が有するように段差を設けて、導線7をリング状に巻回して成る。巻線5の段差には、巻線6を嵌め込むことができ、これにより、ロータマグネット4との対向面において、巻線5と巻線6とを平坦にすることができる。
【0023】
巻線5および巻線6のそれぞれは、ステータ3の円周を1周する間に、等間隔で8箇所の巻回し箇所(以下、「コイル」という)を設けている。
【0024】
巻線5および巻線6のそれぞれには、詳しくは後述するように交番電流が流され、電機子電流と界磁磁束を直交させることで発生するローレンツ力によって、ロータ2の回転と、ロータ2とステータ3との傾きの制御とを同時に行う。
【0025】
以下、図面を参照してロータ2の回転について説明する。ここでは、巻線6が回転用巻線である場合について説明する。見やすさのため、以下の説明図では、巻線5の図示は省略するとともに、各構成を簡略化して図示している。
【0026】
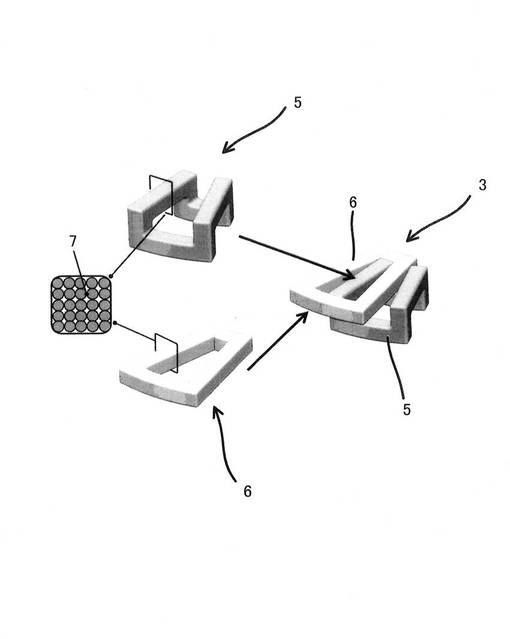
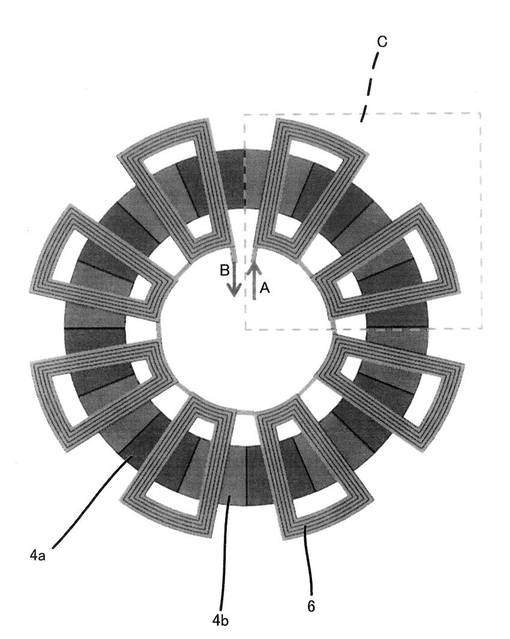
図3は、モータ1の回転原理を説明する図であって、ロータマグネット4と巻線6とを組み合わせた状態を示す平面図である。
【0027】
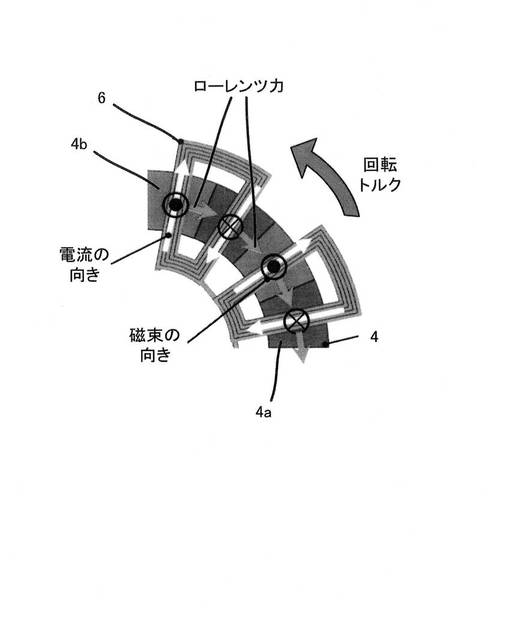
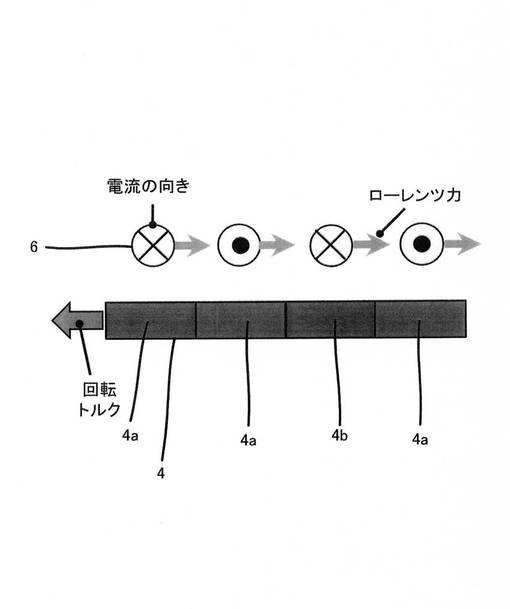
図4は、モータ1の回転原理を説明する図であって、電流を流した状態での、図3の破線Cで囲んだ箇所を拡大して示す図である。
【0028】
図5は、モータ1の回転原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線6とを組み合わせた状態を示す側断面図である。
【0029】
図3に示すように、巻線6は8個のコイルを有し、この8個のコイルを直列に接続している。
【0030】
図4および図5では、ロータ2を回転させているとき(回転制御時)の様子を示している。また、図4および図5では、説明の簡易化のためモータ90degの分のみを示している。
【0031】
ロータマグネット4のS極部4aまたはN極部4bに巻線6があるとき、ロータマグネット4により発生する磁束は、ロータマグネット4の面と垂直な方向に巻線6を貫く。
【0032】
このとき、巻線6に、図3の端子Aから端子Bに向かう電流を流すと、N極上にある巻線6には径方向外側に向かう電流が流れ、S極上にある巻線6には径方向内側に向かう電流が流れる。これにより各巻線6には時計回り方向のローレンツ力が発生する。このとき巻線6すなわちステータ3が固定されていれば、その反作用としてロータ2には図中矢印で示す反時計回りの回転トルクが発生し、これによりロータ2が回転する。
【0033】
次に、モータ1の回転数の検出方法について説明する。
【0034】
モータ2の回転数や巻線6に電流を流すタイミングを検出するためには、交番検知型ホールICを用いることができる。このタイミング検出には光学式ロータリーエンコーダを用いることもできるが、以下では、一例として、交番検知型ホールICについて説明する。
【0035】
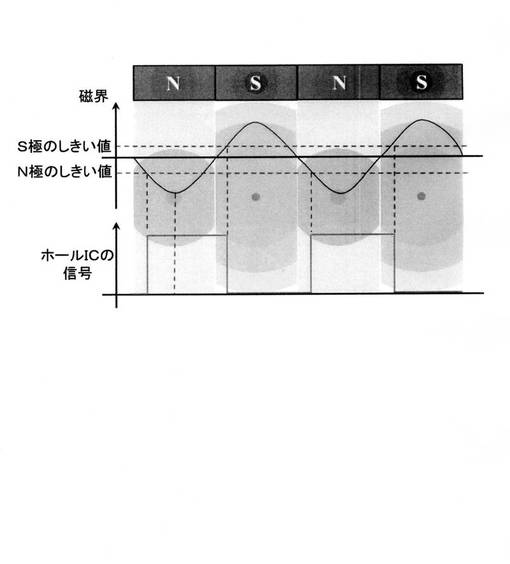
図6は、交番検知型ホールICの動作原理の概略図でする。
【0036】
ホールIC(不図示)とは磁束を検出する磁気センサであるホール素子とその信号をデジタル信号に変換するICをパッケージ化したものである。
【0037】
図6に示すように、このホールICは、検出した磁極がNからSへ、SからNへと切り替わる際の、各極のしきい値を超えたときに、ホールICの信号すなわち出力信号を切り替えるものである。
【0038】
モータ1では、このホールICを例えばステータ3の所定箇所に設け、その出力信号の立上がりと立下りを検出し、この信号間の時間から回転数を算出し、また、この回転数からロータ2の回転角を求めて巻線6に電流を流すタイミングと時間を決定する。
【0039】
続いて、図面を参照してロータ2とステータ3との傾きを制御する機構について説明する。ここでは、巻線5が傾き制御用巻線である場合について説明する。見やすさのため、以下の説明図では、巻線6の図示は省略するとともに、各構成を簡略化して図示している。
【0040】
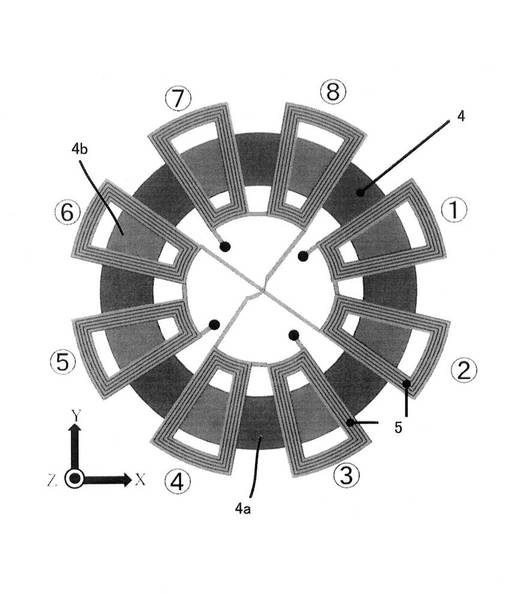
図7は、モータ1の傾き制御原理を説明する図であって、ロータマグネット4と巻線5とを組み合わせた状態を示す平面図である。
【0041】
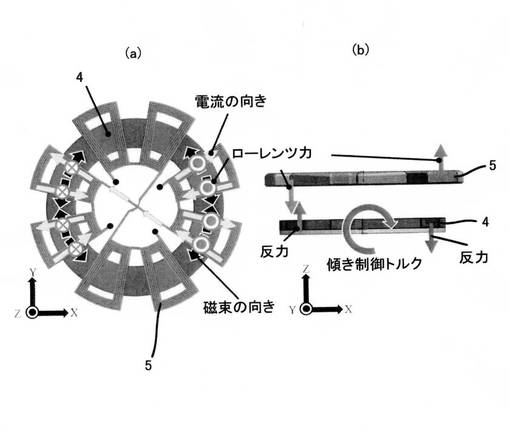
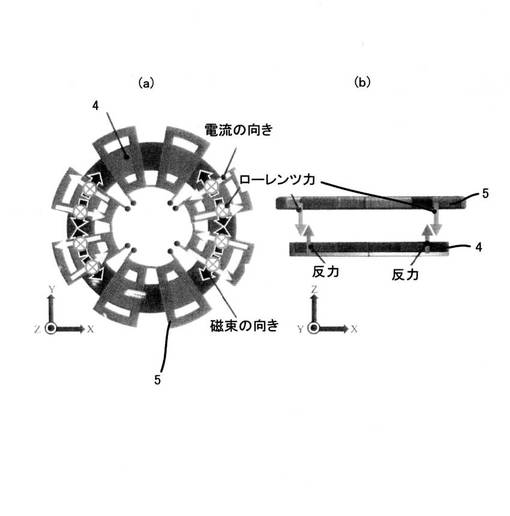
図8は、モータ1の傾き制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【0042】
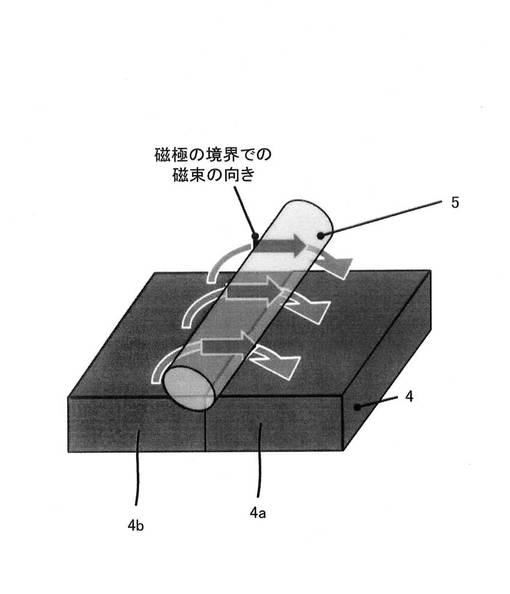
図9は、モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、磁極の境界上の巻線5を模式的に拡大して示す斜視図である。
【0043】
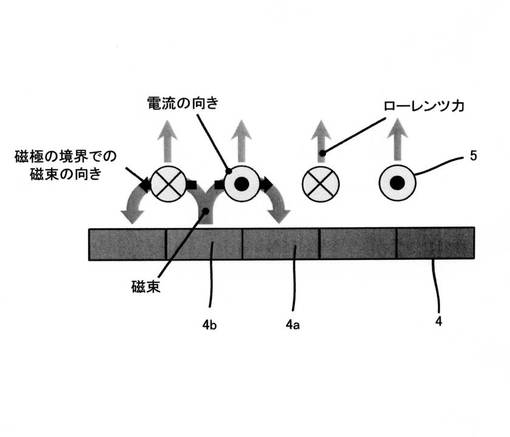
図10は、モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線5とを組み合わせた状態を示す側断面図である。
【0044】
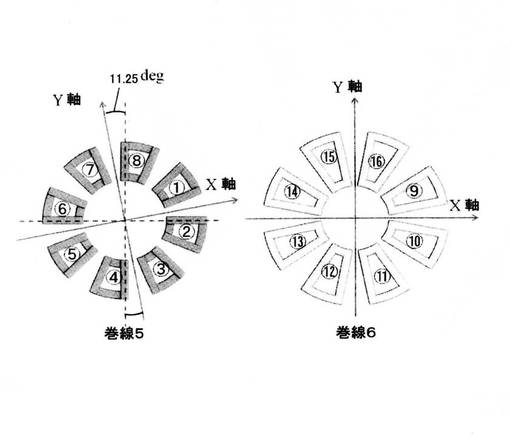
図7に示すように、ここでは、巻線5を形成する8個のコイルのそれぞれに図中に丸付き数字で示すコイル番号を付し、それぞれをコイル(丸1)からコイル(丸8)と呼ぶ。巻線5はこの8個のコイルを有し、コイル(丸1)、(丸2)およびその対角線上にあるコイル(丸5)、(丸6)の4つのコイルを直列に接続しY軸周りの傾き制御用巻線とし、コイル(丸3)、(丸4)およびその対角線上にあるコイル(丸7)、(丸8)の4つのコイルを直列に接続しX軸周りの傾き制御用巻線としている。この例によれば、コイル組(丸3)、(丸4)、(丸7)および(丸8)と、コイル組(丸1)、(丸2)、(丸5)および(丸6)とを用いて、X軸、Y軸周りの回転(傾き)θx、θyが制御可能である。
【0045】
図8は、Y軸周りに傾き制御する場合の様子を示しており、図9、図10は、ロータマグネット4による発生磁束の様子を示している。
【0046】
ロータ2の傾き制御は、傾き制御用巻線5がロータマグネット4のS極部4aとN極部4bとの境界に位置したときに行う。
【0047】
この磁極の境界部では、図9、図10に示すように、N極からS極へと向かう向きに、永久磁石表面すなわち多極着磁した面と平行な磁束が発生している。この平行な磁束と、巻線5に流す電流とにより巻線5には軸方向にローレンツ力が生じる。
【0048】
図8において、巻線5の右側のコイル(コイル(丸1)、(丸2))では図8(b)で上向きのローレンツ力が生じ、左側のコイル(コイル(丸5)、(丸6))では図8(b)で下向きのローレンツ力が生じる。この両方の合力として巻線5には反時計回りの力が発生する。このとき巻線5すなわちステータ3が固定されていれば、その反作用としてロータマグネット4すなわちロータ2には図中矢印で示す時計回りの傾き制御トルクが発生し、これによりロータ2とステータ3との傾きを制御することができる。
【0049】
次に、ロータ2とステータ3との傾きの検出方法について説明する。
【0050】
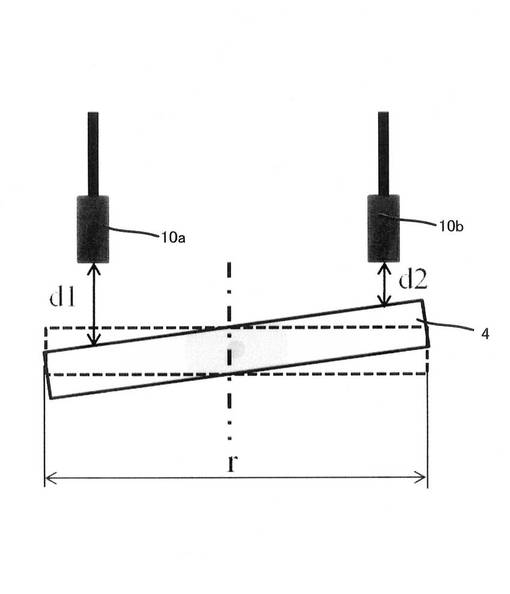
図11は、ロータ2とステータ3との傾きの検出について説明する図である。
【0051】
この傾きは、ステータ3に固定して設けた渦電流式変位センサ10a、10bにより求めることができる。渦電流式変位センサ10a、10bは、ロータ2の円周上、互いに対角線上に設置し、この2つの渦電流センサ10a、10bの出力の変位に基づき、ロータ2のロータマグネット4から渦電流式変位センサ10aまでの距離d1と、ロータ2のロータマグネット4から渦電流式変位センサ10bまでの距離d2とを求めることができ、これによりロータ2とステータ3との傾きを検出することができる。ロータ2の位置は(d1+d2)/2で求められる。
【0052】
次に、モータ1の動作制御について説明する。ここでは、制御法1および制御法2の2種類の制御方法について説明する。
【0053】
制御法1では、ステータ3に設置した2組の巻線5、6のうち、一方を回転専用とし、もう一方を傾き制御専用として用いる。
【0054】
制御法2では、ステータ3に設置した2組の巻線5、6それぞれで、回転と傾き制御の両方の制御を行う。
【0055】
図12は、巻線5と巻線6との電気角のズレを示す平面図である。
【0056】
本実施の形態では、コイル2個を1chとして、巻線5と巻線6それぞれ4ch、合計8chとする。
【0057】
各巻線は、それぞれのchごとに例えば電流励磁用パワーアンプに接続され、制御プログラムによりロータ2の回転角に応じて結線の切り替えを行う。
【0058】
巻線5と巻線6とは互いに嵌め込んだ構成のために機械角12.25degのずれがあるので、後述のように巻線5を傾き制御用として用いる場合、回転軸を反時計まわりに11.25degずらして、傾きを計算する。
【0059】
<制御法1>
制御法1では2組の巻線のうち、一方を回転専用とし、もう一方を傾き制御専用として用いる。
【0060】
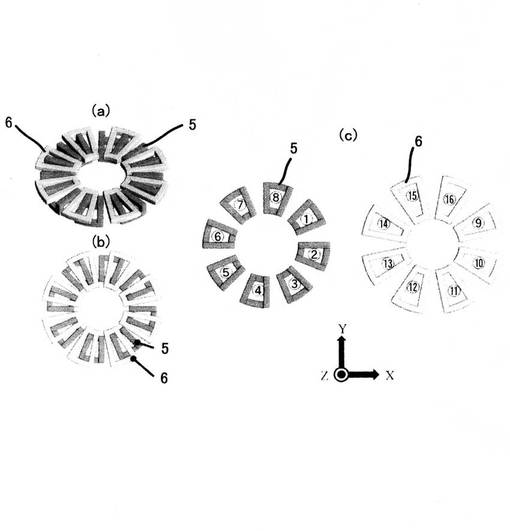
図13は、モータ1の制御法1を説明する図であり、(a)は巻線5と巻線6とを組み合わせた斜視図であり、(b)は巻線5と巻線6とを組み合わせた平面図であり、(c)は巻線5および巻線6それぞれのコイル番号を示す平面図である。
【0061】
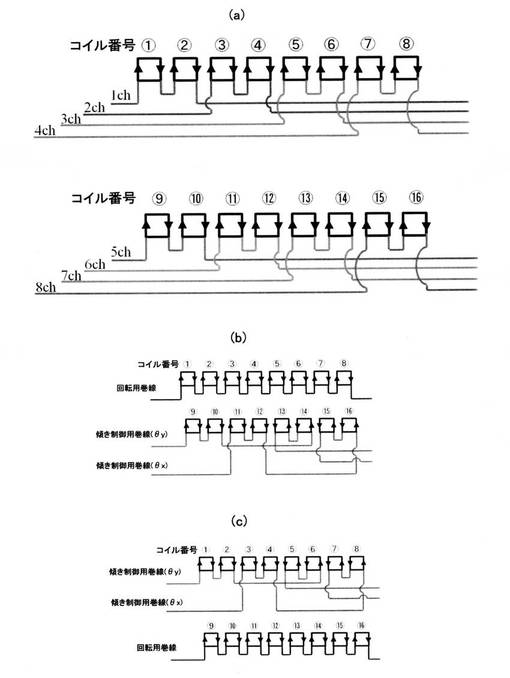
ここでは、巻線5および巻線6それぞれ8個のコイルに対し,図13(c)のように、コイル(丸1)〜コイル(丸16)というコイル番号を付ける。
【0062】
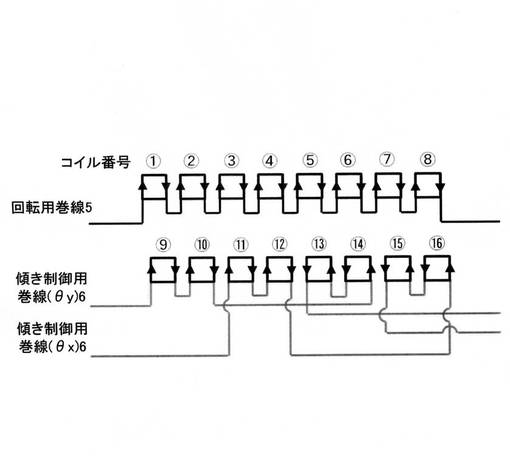
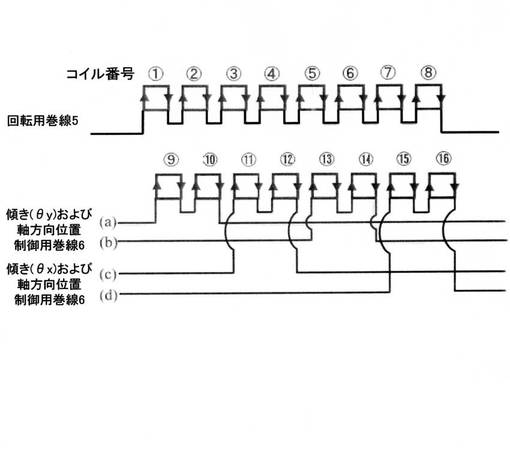
図14は、制御法1の場合の巻線5および巻線6それぞれの接続を示す結線図である。この図14は巻線を直線に展開し、上部から見たものである。
【0063】
制御法1ではコイル(丸1)〜コイル(丸8)を直列に接続した巻線5を回転用とし、コイル(丸9)、(丸10)、(丸13)、(丸14)をY軸周りの傾き制御用とし、コイル(丸11)、(丸12)、(丸15)、(丸16)をX軸周りの傾き制御用とする。
【0064】
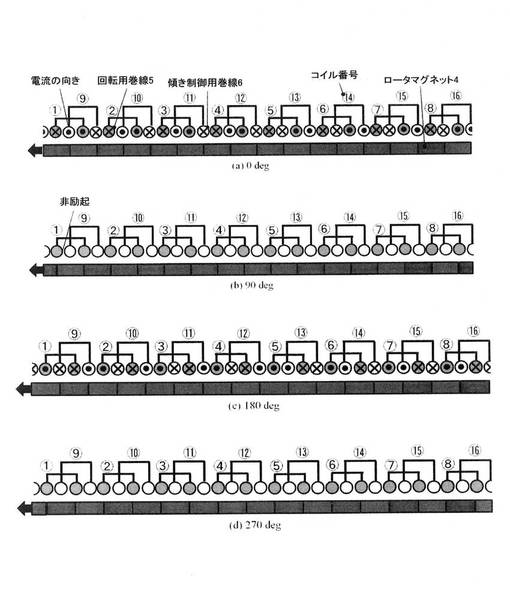
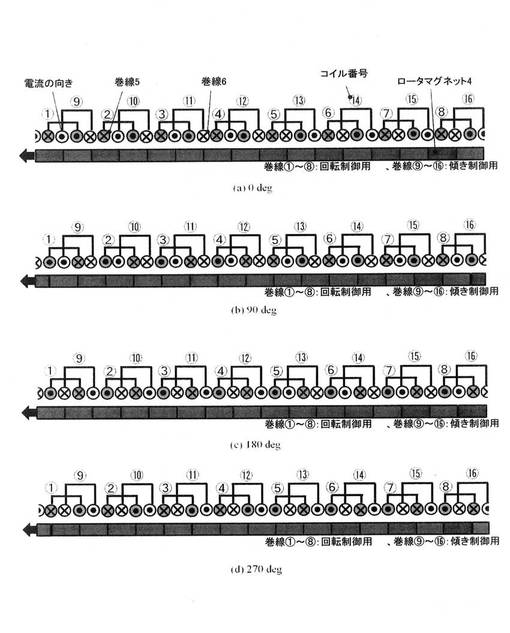
図15は、16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【0065】
傾き制御用電流の方向は、各軸回り右ねじ方向にロータ2を動かす場合のものであり、反対方向の傾き制御は逆向きの電流を流すことで実現することができる。
【0066】
図15(a)のように、回転用巻線5がロータマグネット4の極中央部に正対しているときを回転角0deg(電気角)とする。以下、図15(a)〜(d)を用いて制御法1について説明する。
【0067】
図15(a):
ロータマグネット4の極中央部に回転用巻線5が位置している。このとき、同時にN極とS極との境界上に傾き制御用巻線6が位置することになり、各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0068】
図15(b):
その後、ロータ2が90deg回転して回転角90degとなると、回転用巻線5はN極とS極との境界上に位置し、傾き制御用巻線6は極中央部に位置しているため制御できない。このため、この位置では電流を流さない。
【0069】
図15(c):
ロータ2がさらに90deg回転して回転角180degとなると、図15(a)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、一定方向の回転と傾き制御をするために、図15(a)とは逆向きの電流を各巻線5、6に流す。
【0070】
図15(d):
ロータ2がさらに90deg回転して回転角270degとなると、図15(b)と同様に、回転用巻線5はN極とS極の境界上に位置し、傾き制御用巻線6は極中央部に位置しているため電流は流さない。
【0071】
以上のようにして、本実施の形態では、制御法1によりロータ2の回転角180degごとに回転と傾きの同時制御を行うことができる。
【0072】
<制御法2>
制御法2では、ステータ3に設置した2組の巻線それぞれで、回転と傾き制御の両方の制御を行う。この制御法2は、ロータ2の回転角に応じコイルの接続を変え、2組の巻線それぞれで回転と傾き制御の両方の制御を行う方法である。
【0073】
図16は、制御法2の場合の2組の巻線それぞれの接続を示す結線図であり、(a)は各コイルの接続を示す図であり、(b)は、一方の巻線を回転用とし他方の巻線を傾き制御用とした場合の結線を示す図であり、(c)一方の巻線を傾き制御用とし他方の巻線を回転用とした場合の結線を示す図である。この図16は巻線を直線に展開し、上部から見たものである。
【0074】
ここでは、一方の巻線を巻線5とし、他方の巻線を巻線6とする。巻線5および巻線6の結線は、制御法1とは異なり、コイルの組み合わせごとにchとして電流励磁用パワーアンプに接続し、電流励磁用パワーアンプによって所望の結線状態を実現する。
【0075】
図17は、16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【0076】
傾き制御用電流の方向は、各軸回り右ねじ方向にロータ2を動かす場合のものであり、反対方向の傾き制御は逆向きの電流を流すことで実現することができる。
【0077】
図17(a)のように、巻線5がロータマグネット4の極中央部に正対しているときを回転角0deg(電気角)とする。以下、図17(a)〜(d)を用いて制御法2について説明する。
【0078】
図17(a):
ロータマグネット4の極中央部に巻線(丸1)〜(丸8)が位置している。このとき、同時にN極とS極との境界上に巻線(丸9)〜(丸16)が位置している。このため、図16(b)のように巻線5を回転用として用い、巻線6を傾き制御用として用いる。各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0079】
図17(b):
その後、ロータ2が90deg回転して回転角90degとなると、巻線5はN極とS極との境界上に位置し、巻線6は極中央部に位置する。このため、図16(c)のように巻線6を回転用として用い、巻線5を傾き制御用として用いる。各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0080】
図17(c):
ロータ2がさらに90deg回転して回転角180degとなると、図17(a)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、図16(b)のように巻線5を回転用として用い、巻線6を傾き制御用として用いて、一定方向の回転と傾き制御をするために、図17(a)とは逆向きの電流を各巻線5、6に流す。
【0081】
図17(d):
ロータ2がさらに90deg回転して回転角270degとなると、図17(b)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、図16(c)のように巻線6を回転用として用い、巻線5を傾き制御用として用いて、一定方向の回転と傾き制御をするために、図17(b)とは逆向きの電流を各巻線5、6に流す。
【0082】
このように、制御法2はロータ2の回転に応じ電気角で90degごとに回転用巻線と傾き制御用巻線との入れ替え制御をする方法である。2相で制御できるため発生する回転トルクを増加することができる。
【0083】
<制御システム>
次に、図1に示したモータ1を駆動制御する制御システムの構成について説明する。
【0084】
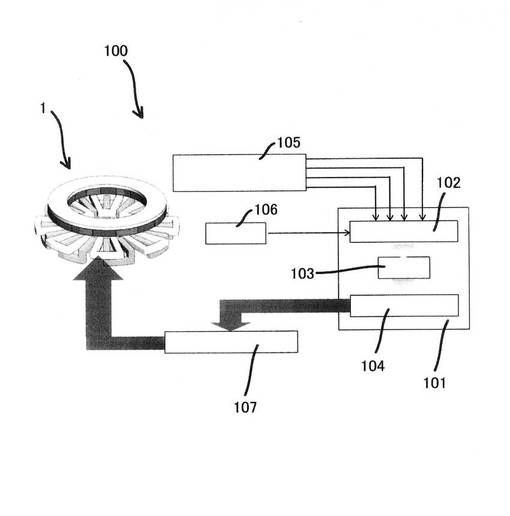
図18は、モータ1の制御システムの構成を示すブロック図である。
【0085】
本制御システム100は、モータ1と、渦電流式変位センサ105と、ホールIC106と、デジタルPIDコントローラ101と、パワーアンプ107とを有して構成される。デジタルPIDコントローラ101は、アナログ信号をデジタル変換するA/Dコンバータ102や、演算を行うDSP(デジタルシグナルプロセッサ)103や、デジタル信号をアナログ変換するD/Aコンバータ104を有して、モータ1に対するPID制御を行う。
【0086】
渦電流式変位センサ105は、ステータ3の円周上、等間隔に4つ設け、この4つの渦電流式変位センサ105によりロータ2の傾きを検出する。また、ホールIC106は、ロータ2の回転数と回転角を検出する。
【0087】
ロータ2の制御は、デジタルPIDコントローラ101によるデジタルPID制御で行う。
【0088】
渦電流式変位センサ105やホールIC106で検出した信号は、A/Dコンバータ102を介してDSP103に取り込む。DSP103では、これら取り込んだ信号より求めた、ロータ2の傾き、回転数を基に必要な電流を算出し、D/Aコンバータ104を介してパワーアンプ107の各チャンネルから各巻線5、6に電流を流す。
【0089】
ところで、本発明は、傾き制御とともにロータの軸方向位置の制御(ステータとロータとの間隔の制御)を行うこともできる。このロータの軸方向位置の制御によれば、ロータをステータから浮上させる浮上制御を行うこともできる。この制御について、図19、図20および図21を参照して以下に説明する。
【0090】
図19は、モータ1の軸方向位置制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【0091】
図20は、図19の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【0092】
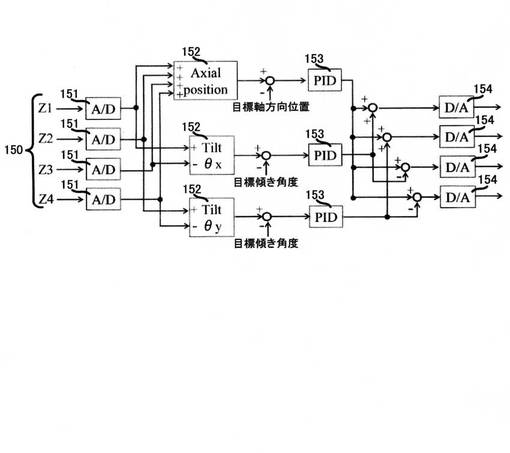
図21は、図19の場合の制御システムの構成を示すブロック図である。
【0093】
図19のように位置・傾き制御用コイルを4つのコイル(図7の番号で言えば、(丸1)と(丸2)、(丸3)と(丸4)、(丸5)と(丸6)、(丸7)と(丸8))に分割し、図20のように結線し、それぞれのコイルに個別に電流を流すようにすれば、浮上ロータの軸方向(Z軸方向)位置および径方向軸(X軸、Y軸)周りの傾きを同時に制御可能となる。例えば位置制御を行う場合は図19のように位置・傾き制御用コイルに電流を流せば、軸方向と同一方向にローレンツ力を発生でき、その半力でロータの軸方向位置を制御できる。傾き制御に関しては、図8のような電流を流せばよいので、図19と図8の電流をそれぞれのコイルごと(ここでは、(丸1)と(丸2)が1セットのコイル、(丸5)と(丸6)がもう1セットのコイル)に位置制御と傾き制御に必要な電流方向、電流量を計算して、それを足し合わせてコイルセットごとに流せば位置と傾きの同時制御が可能となる。
【0094】
軸方向位置制御を行う場合には、図21に示すように、4つの位置センサ(渦電流センサ)の信号150から、浮上ロータの軸方向(Z軸方向)位置および径方向軸(X軸、Y軸)周りの傾きを計算し(A/Dコンバータ151、演算手段152)、目標値との偏差を取り、デジタルPID制御器153で制御電流地を計算し、位置制御および傾き制御に必要な電流をそれぞれの電磁石ごとに足し算して流す(D/Aコンバータ154)。
【0095】
<測定結果>
続いて、上述した本発明によるローレンツモータ1の特性について、実際に実験を行った結果に基づいて説明する。
【0096】
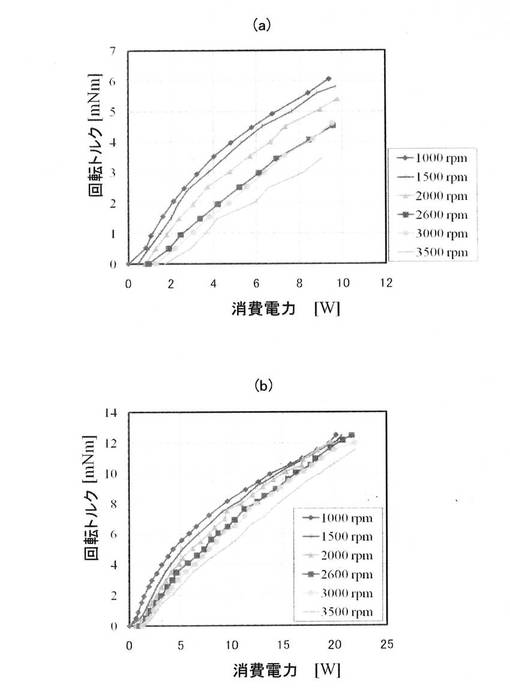
図22は、本発明によるローレンツモータ1の回転トルクを測定した実験結果を示すグラフであり、(a)は制御法1の実験結果であり、(b)は制御法2の実験結果である。図22において、横軸は消費電力、縦軸は回転トルクであり、回転数ごとの測定結果をグラフにしている。
【0097】
この実験によれば、例えば2600rpm時の制御法1での回転トルクは最大で4.5mNmであり、このときの消費電力は9.6Wであった。
【0098】
また、制御法2を用いた場合、最大で12.5mNmの回転トルクを発生可能であり、そのときの消費電力は21Wであった。
【0099】
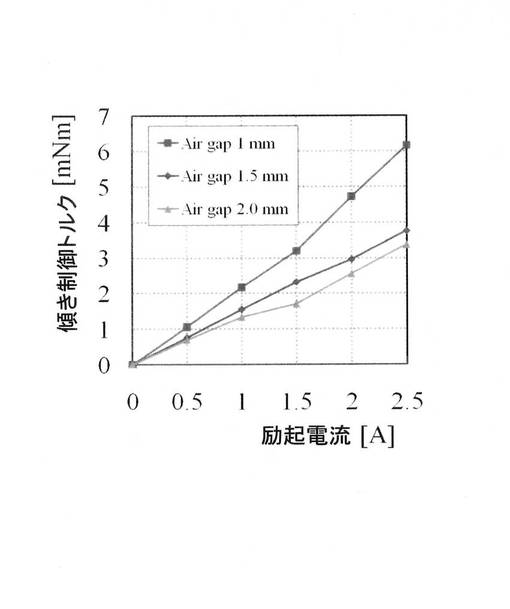
図23は、本発明によるローレンツモータ1の傾き制御トルクを測定した実験結果を示すグラフである。図23において、横軸は励起電流、縦軸は傾き制御トルクであり、ロータ2とステータ3とのスペースすなわちエアギャップごとの測定結果をグラフにしている。
【0100】
実験によれば、モータ1では、エアギャップ1mm、2.5A励磁時に6.2mNmの傾き制御トルクの発生を確認できた。これにより、ロータ2とステータ3との傾きを制御する傾き制御が可能となる。
【0101】
<他の構成>
なお、上述の説明では、モータ1が扁平型モータの場合を例に説明したが、本発明はこれに限られるものではなく、例えば円筒型のモータにも適用可能である。この例を図24に示す。
【0102】
本発明は、図24に示す構成にも適用可能である。例えば、シリンダ状のロータの周りに縦長にステータ巻線を配置した構成において、本発明を適用することにより、ロータの回転と、ロータとステータとの傾き(ただし、本例の場合、ロータの径方向位置といった方がより適切)を制御可能とすることができる。
【0103】
以上、本発明を説明したが、本発明は、この説明に限定されるものではなく、本発明の趣旨を逸脱しない範囲で数々の変形および組み合わせが出来ることは勿論である。
【符号の説明】
【0104】
1 モータ
2 ロータ
3 ステータ
4 ロータマグネット
4a S極部
4b N極部
5 巻線
6 巻線
7 導線
【技術分野】
【0001】
本発明はローレンツモータに関し、詳しくは、傾き及び位置制御が可能なローレンツモータに関する。
【背景技術】
【0002】
従来、ロータとステータとがボールベアリングなどの軸受けを介して接触して連結される一般的なモータとは別に、ロータとステータとが接することなく、磁気軸受構造または動圧軸受構造でロータとステータとの間のスペースを一定に保ちながら回転するローレンツモータが知られている(特許文献1、特許文献2参照)。
【0003】
このようなローレンツモータの磁気軸受構造においては、ロータを回転させる回転用の巻線のほかに、ロータとステータとの間のスペースを一定に保つために、ロータとステータとの傾きを制御する傾き及び位置制御用の巻線を設けるようにしていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−78389号公報
【特許文献2】特開2002−325490号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来のローレンツモータにおいては、ロータとステータとの傾き・位置を制御する機構を、ロータを回転させる機構のほかに設けており、その傾き・位置制御機構を小型化することが困難であったため、傾き・位置制御機構を収容するスペースがモータに必要であり、モータを小型化する際の障害となっていた。
【0006】
本発明は、上記課題に鑑みてなされたものであり、ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、ステータとロータとを有し、前記ステータと前記ロータとを対向配置し、前記ステータと前記ロータとの間に作用するローレンツ力によって前記ロータが前記ステータに対して回転するよう構成されたローレンツモータにおいて、前記ロータは、前記ステータとの対向面に多極着磁したロータマグネットを有し、前記ステータは、交番電流を流されることによって前記ロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによって前記ロータと前記ステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、前記傾き制御用巻線は、前記ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるものであることを特徴とする。
【発明の効果】
【0008】
本発明によれば、ロータとステータとの傾きと位置を制御する傾き・位置制御機構を小型化することが可能なローレンツモータを提供することができる。
【0009】
すなわち、本発明では、傾き・位置制御用巻線は、ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるので、回転用巻線と干渉せずに空きスペースに収容可能であり、傾き・位置制御機構を小型化することが可能である。
【0010】
また本発明は、薄いスペース(ロータとステータ巻線との間の空間)に傾き・位置制御機構を構成することができるので、能動的傾き・位置制御が可能なデバイスの薄型化に貢献することができる。
【0011】
また本発明は、傾き・位置制御にローレンツ力を利用しているため、浮上ロータに対して巻線で発生する余分な力を加えることがなく、他のロータ姿勢に影響を与えることがない。
【0012】
また本発明は、時分割で傾き・位置制御コイルを回転用制御コイルとして使用することで、傾き・位置制御用巻線も、ロータの回転に利用することができ、これにより従来の2倍のトルクを発生することも可能である。
【図面の簡単な説明】
【0013】
【図1】本発明によるローレンツモータの一実施の形態を示す概略斜視図である。
【図2】図1に示したステータ3を構成する巻線を説明する図である。
【図3】モータ1の回転原理を説明する図であって、ロータマグネット4と巻線6とを組み合わせた状態を示す平面図である。
【図4】モータ1の回転原理を説明する図であって、電流を流した状態での、図3の破線Cで囲んだ箇所を拡大して示す図である。
【図5】モータ1の回転原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線6とを組み合わせた状態を示す側断面図である。
【図6】交番検知型ホールICの動作原理の概略図でする。
【図7】モータ1の傾き制御原理を説明する図であって、ロータマグネット4と巻線5とを組み合わせた状態を示す平面図である。
【図8】モータ1の傾き制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【図9】モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、磁極の境界上の巻線5を模式的に拡大して示す斜視図である。
【図10】モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線5とを組み合わせた状態を示す側断面図である。
【図11】ロータ2とステータ3との傾きの検出について説明する図である。
【図12】巻線5と巻線6との電気角のズレを示す平面図である。
【図13】モータ1の制御法1を説明する図であり、(a)は巻線5と巻線6とを組み合わせた斜視図であり、(b)は巻線5と巻線6とを組み合わせた平面図であり、(c)は巻線5および巻線6それぞれのコイル番号を示す平面図である。
【図14】制御法1の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【図15】16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【図16】制御法2の場合の2組の巻線それぞれの接続を示す結線図であり、(a)は各コイルの接続を示す図であり、(b)は、一方の巻線を回転用とし他方の巻線を傾き制御用とした場合の結線を示す図であり、(c)一方の巻線を傾き制御用とし他方の巻線を回転用とした場合の結線を示す図である。
【図17】16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【図18】モータ1の制御システムの構成を示すブロック図である。
【図19】モータ1の軸方向位置制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【図20】図19の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【図21】図19の場合の制御システムの構成を示すブロック図である。
【図22】本発明によるローレンツモータ1の回転トルクを測定した実験結果を示すグラフであり、(a)は制御法1の実験結果であり、(b)は制御法2の実験結果である。
【図23】本発明によるローレンツモータ1の傾き制御トルクを測定した実験結果を示すグラフである。
【図24】本発明によるローレンツモータの形状の別の例を示す図であり、(a)は側面図であり、(b)は斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
【0015】
図1は、本発明によるローレンツモータの一実施の形態を示す概略斜視図である。
【0016】
本実施の形態のローレンツモータ1は、ロータ2とステータ3とを有して構成される。ロータ2とステータ3とは所定面同士が対向するように配置され、このときのロータ2とステータ3との傾き、ロータ2とステータ3との間隔(ロータ2の軸方向位置)は、後述の傾き・位置制御によって制御される。
【0017】
ロータ2は、ステータ3との対向面に多極着磁したロータマグネット4を有する。本実施の形態では、ロータマグネット4は、16極の表面着磁型永久磁石により構成されている。すなわち、ロータマグネット4は、S極部4aとN極部4bとを交互に設け、1周の間にS極部4aを8箇所、N極部4bを8箇所、設けている。
【0018】
ステータ3は、それぞれ別の導線で構成される巻線5および巻線6を有する。
【0019】
図2は、図1に示したステータ3を構成する巻線を説明する図である。
【0020】
本実施の形態では、導線7としてポリエステル銅線を用いており、導線7を巻回して巻線5を形成し、また導線7を巻回して巻線6を形成する。巻線5および巻線6それぞれの結線状態は後述する。
【0021】
巻線6は、ロータマグネット4との対向面と平行になるように導線7をリング状に巻回して成る。
【0022】
一方、巻線5は、ロータマグネット4との対向面と平行な箇所と、ほぼ垂直な箇所とを導線7が有するように段差を設けて、導線7をリング状に巻回して成る。巻線5の段差には、巻線6を嵌め込むことができ、これにより、ロータマグネット4との対向面において、巻線5と巻線6とを平坦にすることができる。
【0023】
巻線5および巻線6のそれぞれは、ステータ3の円周を1周する間に、等間隔で8箇所の巻回し箇所(以下、「コイル」という)を設けている。
【0024】
巻線5および巻線6のそれぞれには、詳しくは後述するように交番電流が流され、電機子電流と界磁磁束を直交させることで発生するローレンツ力によって、ロータ2の回転と、ロータ2とステータ3との傾きの制御とを同時に行う。
【0025】
以下、図面を参照してロータ2の回転について説明する。ここでは、巻線6が回転用巻線である場合について説明する。見やすさのため、以下の説明図では、巻線5の図示は省略するとともに、各構成を簡略化して図示している。
【0026】
図3は、モータ1の回転原理を説明する図であって、ロータマグネット4と巻線6とを組み合わせた状態を示す平面図である。
【0027】
図4は、モータ1の回転原理を説明する図であって、電流を流した状態での、図3の破線Cで囲んだ箇所を拡大して示す図である。
【0028】
図5は、モータ1の回転原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線6とを組み合わせた状態を示す側断面図である。
【0029】
図3に示すように、巻線6は8個のコイルを有し、この8個のコイルを直列に接続している。
【0030】
図4および図5では、ロータ2を回転させているとき(回転制御時)の様子を示している。また、図4および図5では、説明の簡易化のためモータ90degの分のみを示している。
【0031】
ロータマグネット4のS極部4aまたはN極部4bに巻線6があるとき、ロータマグネット4により発生する磁束は、ロータマグネット4の面と垂直な方向に巻線6を貫く。
【0032】
このとき、巻線6に、図3の端子Aから端子Bに向かう電流を流すと、N極上にある巻線6には径方向外側に向かう電流が流れ、S極上にある巻線6には径方向内側に向かう電流が流れる。これにより各巻線6には時計回り方向のローレンツ力が発生する。このとき巻線6すなわちステータ3が固定されていれば、その反作用としてロータ2には図中矢印で示す反時計回りの回転トルクが発生し、これによりロータ2が回転する。
【0033】
次に、モータ1の回転数の検出方法について説明する。
【0034】
モータ2の回転数や巻線6に電流を流すタイミングを検出するためには、交番検知型ホールICを用いることができる。このタイミング検出には光学式ロータリーエンコーダを用いることもできるが、以下では、一例として、交番検知型ホールICについて説明する。
【0035】
図6は、交番検知型ホールICの動作原理の概略図でする。
【0036】
ホールIC(不図示)とは磁束を検出する磁気センサであるホール素子とその信号をデジタル信号に変換するICをパッケージ化したものである。
【0037】
図6に示すように、このホールICは、検出した磁極がNからSへ、SからNへと切り替わる際の、各極のしきい値を超えたときに、ホールICの信号すなわち出力信号を切り替えるものである。
【0038】
モータ1では、このホールICを例えばステータ3の所定箇所に設け、その出力信号の立上がりと立下りを検出し、この信号間の時間から回転数を算出し、また、この回転数からロータ2の回転角を求めて巻線6に電流を流すタイミングと時間を決定する。
【0039】
続いて、図面を参照してロータ2とステータ3との傾きを制御する機構について説明する。ここでは、巻線5が傾き制御用巻線である場合について説明する。見やすさのため、以下の説明図では、巻線6の図示は省略するとともに、各構成を簡略化して図示している。
【0040】
図7は、モータ1の傾き制御原理を説明する図であって、ロータマグネット4と巻線5とを組み合わせた状態を示す平面図である。
【0041】
図8は、モータ1の傾き制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【0042】
図9は、モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、磁極の境界上の巻線5を模式的に拡大して示す斜視図である。
【0043】
図10は、モータ1の傾き制御に用いるローレンツ力発生原理を説明する図であって、電流を流した状態での、ロータマグネット4と巻線5とを組み合わせた状態を示す側断面図である。
【0044】
図7に示すように、ここでは、巻線5を形成する8個のコイルのそれぞれに図中に丸付き数字で示すコイル番号を付し、それぞれをコイル(丸1)からコイル(丸8)と呼ぶ。巻線5はこの8個のコイルを有し、コイル(丸1)、(丸2)およびその対角線上にあるコイル(丸5)、(丸6)の4つのコイルを直列に接続しY軸周りの傾き制御用巻線とし、コイル(丸3)、(丸4)およびその対角線上にあるコイル(丸7)、(丸8)の4つのコイルを直列に接続しX軸周りの傾き制御用巻線としている。この例によれば、コイル組(丸3)、(丸4)、(丸7)および(丸8)と、コイル組(丸1)、(丸2)、(丸5)および(丸6)とを用いて、X軸、Y軸周りの回転(傾き)θx、θyが制御可能である。
【0045】
図8は、Y軸周りに傾き制御する場合の様子を示しており、図9、図10は、ロータマグネット4による発生磁束の様子を示している。
【0046】
ロータ2の傾き制御は、傾き制御用巻線5がロータマグネット4のS極部4aとN極部4bとの境界に位置したときに行う。
【0047】
この磁極の境界部では、図9、図10に示すように、N極からS極へと向かう向きに、永久磁石表面すなわち多極着磁した面と平行な磁束が発生している。この平行な磁束と、巻線5に流す電流とにより巻線5には軸方向にローレンツ力が生じる。
【0048】
図8において、巻線5の右側のコイル(コイル(丸1)、(丸2))では図8(b)で上向きのローレンツ力が生じ、左側のコイル(コイル(丸5)、(丸6))では図8(b)で下向きのローレンツ力が生じる。この両方の合力として巻線5には反時計回りの力が発生する。このとき巻線5すなわちステータ3が固定されていれば、その反作用としてロータマグネット4すなわちロータ2には図中矢印で示す時計回りの傾き制御トルクが発生し、これによりロータ2とステータ3との傾きを制御することができる。
【0049】
次に、ロータ2とステータ3との傾きの検出方法について説明する。
【0050】
図11は、ロータ2とステータ3との傾きの検出について説明する図である。
【0051】
この傾きは、ステータ3に固定して設けた渦電流式変位センサ10a、10bにより求めることができる。渦電流式変位センサ10a、10bは、ロータ2の円周上、互いに対角線上に設置し、この2つの渦電流センサ10a、10bの出力の変位に基づき、ロータ2のロータマグネット4から渦電流式変位センサ10aまでの距離d1と、ロータ2のロータマグネット4から渦電流式変位センサ10bまでの距離d2とを求めることができ、これによりロータ2とステータ3との傾きを検出することができる。ロータ2の位置は(d1+d2)/2で求められる。
【0052】
次に、モータ1の動作制御について説明する。ここでは、制御法1および制御法2の2種類の制御方法について説明する。
【0053】
制御法1では、ステータ3に設置した2組の巻線5、6のうち、一方を回転専用とし、もう一方を傾き制御専用として用いる。
【0054】
制御法2では、ステータ3に設置した2組の巻線5、6それぞれで、回転と傾き制御の両方の制御を行う。
【0055】
図12は、巻線5と巻線6との電気角のズレを示す平面図である。
【0056】
本実施の形態では、コイル2個を1chとして、巻線5と巻線6それぞれ4ch、合計8chとする。
【0057】
各巻線は、それぞれのchごとに例えば電流励磁用パワーアンプに接続され、制御プログラムによりロータ2の回転角に応じて結線の切り替えを行う。
【0058】
巻線5と巻線6とは互いに嵌め込んだ構成のために機械角12.25degのずれがあるので、後述のように巻線5を傾き制御用として用いる場合、回転軸を反時計まわりに11.25degずらして、傾きを計算する。
【0059】
<制御法1>
制御法1では2組の巻線のうち、一方を回転専用とし、もう一方を傾き制御専用として用いる。
【0060】
図13は、モータ1の制御法1を説明する図であり、(a)は巻線5と巻線6とを組み合わせた斜視図であり、(b)は巻線5と巻線6とを組み合わせた平面図であり、(c)は巻線5および巻線6それぞれのコイル番号を示す平面図である。
【0061】
ここでは、巻線5および巻線6それぞれ8個のコイルに対し,図13(c)のように、コイル(丸1)〜コイル(丸16)というコイル番号を付ける。
【0062】
図14は、制御法1の場合の巻線5および巻線6それぞれの接続を示す結線図である。この図14は巻線を直線に展開し、上部から見たものである。
【0063】
制御法1ではコイル(丸1)〜コイル(丸8)を直列に接続した巻線5を回転用とし、コイル(丸9)、(丸10)、(丸13)、(丸14)をY軸周りの傾き制御用とし、コイル(丸11)、(丸12)、(丸15)、(丸16)をX軸周りの傾き制御用とする。
【0064】
図15は、16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【0065】
傾き制御用電流の方向は、各軸回り右ねじ方向にロータ2を動かす場合のものであり、反対方向の傾き制御は逆向きの電流を流すことで実現することができる。
【0066】
図15(a)のように、回転用巻線5がロータマグネット4の極中央部に正対しているときを回転角0deg(電気角)とする。以下、図15(a)〜(d)を用いて制御法1について説明する。
【0067】
図15(a):
ロータマグネット4の極中央部に回転用巻線5が位置している。このとき、同時にN極とS極との境界上に傾き制御用巻線6が位置することになり、各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0068】
図15(b):
その後、ロータ2が90deg回転して回転角90degとなると、回転用巻線5はN極とS極との境界上に位置し、傾き制御用巻線6は極中央部に位置しているため制御できない。このため、この位置では電流を流さない。
【0069】
図15(c):
ロータ2がさらに90deg回転して回転角180degとなると、図15(a)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、一定方向の回転と傾き制御をするために、図15(a)とは逆向きの電流を各巻線5、6に流す。
【0070】
図15(d):
ロータ2がさらに90deg回転して回転角270degとなると、図15(b)と同様に、回転用巻線5はN極とS極の境界上に位置し、傾き制御用巻線6は極中央部に位置しているため電流は流さない。
【0071】
以上のようにして、本実施の形態では、制御法1によりロータ2の回転角180degごとに回転と傾きの同時制御を行うことができる。
【0072】
<制御法2>
制御法2では、ステータ3に設置した2組の巻線それぞれで、回転と傾き制御の両方の制御を行う。この制御法2は、ロータ2の回転角に応じコイルの接続を変え、2組の巻線それぞれで回転と傾き制御の両方の制御を行う方法である。
【0073】
図16は、制御法2の場合の2組の巻線それぞれの接続を示す結線図であり、(a)は各コイルの接続を示す図であり、(b)は、一方の巻線を回転用とし他方の巻線を傾き制御用とした場合の結線を示す図であり、(c)一方の巻線を傾き制御用とし他方の巻線を回転用とした場合の結線を示す図である。この図16は巻線を直線に展開し、上部から見たものである。
【0074】
ここでは、一方の巻線を巻線5とし、他方の巻線を巻線6とする。巻線5および巻線6の結線は、制御法1とは異なり、コイルの組み合わせごとにchとして電流励磁用パワーアンプに接続し、電流励磁用パワーアンプによって所望の結線状態を実現する。
【0075】
図17は、16極のロータが電気角で360deg(機械角45deg)回転するときの様子を電気角90degごとに示す図であって、モータを径方向に展開した図であり、(a)は電気角0deg(360deg)の図であり、(b)は電気角90degの図であり、(c)は電気角180degの図であり、(d)は電気角270degの図である。
【0076】
傾き制御用電流の方向は、各軸回り右ねじ方向にロータ2を動かす場合のものであり、反対方向の傾き制御は逆向きの電流を流すことで実現することができる。
【0077】
図17(a)のように、巻線5がロータマグネット4の極中央部に正対しているときを回転角0deg(電気角)とする。以下、図17(a)〜(d)を用いて制御法2について説明する。
【0078】
図17(a):
ロータマグネット4の極中央部に巻線(丸1)〜(丸8)が位置している。このとき、同時にN極とS極との境界上に巻線(丸9)〜(丸16)が位置している。このため、図16(b)のように巻線5を回転用として用い、巻線6を傾き制御用として用いる。各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0079】
図17(b):
その後、ロータ2が90deg回転して回転角90degとなると、巻線5はN極とS極との境界上に位置し、巻線6は極中央部に位置する。このため、図16(c)のように巻線6を回転用として用い、巻線5を傾き制御用として用いる。各巻線5、6に所定の電流を流して、回転と同時に傾きの制御も行うことができる。
【0080】
図17(c):
ロータ2がさらに90deg回転して回転角180degとなると、図17(a)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、図16(b)のように巻線5を回転用として用い、巻線6を傾き制御用として用いて、一定方向の回転と傾き制御をするために、図17(a)とは逆向きの電流を各巻線5、6に流す。
【0081】
図17(d):
ロータ2がさらに90deg回転して回転角270degとなると、図17(b)ではN極だった所がS極になり、S極だった所がN極に入れ替わる。このため、図16(c)のように巻線6を回転用として用い、巻線5を傾き制御用として用いて、一定方向の回転と傾き制御をするために、図17(b)とは逆向きの電流を各巻線5、6に流す。
【0082】
このように、制御法2はロータ2の回転に応じ電気角で90degごとに回転用巻線と傾き制御用巻線との入れ替え制御をする方法である。2相で制御できるため発生する回転トルクを増加することができる。
【0083】
<制御システム>
次に、図1に示したモータ1を駆動制御する制御システムの構成について説明する。
【0084】
図18は、モータ1の制御システムの構成を示すブロック図である。
【0085】
本制御システム100は、モータ1と、渦電流式変位センサ105と、ホールIC106と、デジタルPIDコントローラ101と、パワーアンプ107とを有して構成される。デジタルPIDコントローラ101は、アナログ信号をデジタル変換するA/Dコンバータ102や、演算を行うDSP(デジタルシグナルプロセッサ)103や、デジタル信号をアナログ変換するD/Aコンバータ104を有して、モータ1に対するPID制御を行う。
【0086】
渦電流式変位センサ105は、ステータ3の円周上、等間隔に4つ設け、この4つの渦電流式変位センサ105によりロータ2の傾きを検出する。また、ホールIC106は、ロータ2の回転数と回転角を検出する。
【0087】
ロータ2の制御は、デジタルPIDコントローラ101によるデジタルPID制御で行う。
【0088】
渦電流式変位センサ105やホールIC106で検出した信号は、A/Dコンバータ102を介してDSP103に取り込む。DSP103では、これら取り込んだ信号より求めた、ロータ2の傾き、回転数を基に必要な電流を算出し、D/Aコンバータ104を介してパワーアンプ107の各チャンネルから各巻線5、6に電流を流す。
【0089】
ところで、本発明は、傾き制御とともにロータの軸方向位置の制御(ステータとロータとの間隔の制御)を行うこともできる。このロータの軸方向位置の制御によれば、ロータをステータから浮上させる浮上制御を行うこともできる。この制御について、図19、図20および図21を参照して以下に説明する。
【0090】
図19は、モータ1の軸方向位置制御原理を説明する図であって、(a)は電流を流した状態での平面図であり、(b)は電流を流した状態での側面図である。
【0091】
図20は、図19の場合の巻線5および巻線6それぞれの接続を示す結線図である。
【0092】
図21は、図19の場合の制御システムの構成を示すブロック図である。
【0093】
図19のように位置・傾き制御用コイルを4つのコイル(図7の番号で言えば、(丸1)と(丸2)、(丸3)と(丸4)、(丸5)と(丸6)、(丸7)と(丸8))に分割し、図20のように結線し、それぞれのコイルに個別に電流を流すようにすれば、浮上ロータの軸方向(Z軸方向)位置および径方向軸(X軸、Y軸)周りの傾きを同時に制御可能となる。例えば位置制御を行う場合は図19のように位置・傾き制御用コイルに電流を流せば、軸方向と同一方向にローレンツ力を発生でき、その半力でロータの軸方向位置を制御できる。傾き制御に関しては、図8のような電流を流せばよいので、図19と図8の電流をそれぞれのコイルごと(ここでは、(丸1)と(丸2)が1セットのコイル、(丸5)と(丸6)がもう1セットのコイル)に位置制御と傾き制御に必要な電流方向、電流量を計算して、それを足し合わせてコイルセットごとに流せば位置と傾きの同時制御が可能となる。
【0094】
軸方向位置制御を行う場合には、図21に示すように、4つの位置センサ(渦電流センサ)の信号150から、浮上ロータの軸方向(Z軸方向)位置および径方向軸(X軸、Y軸)周りの傾きを計算し(A/Dコンバータ151、演算手段152)、目標値との偏差を取り、デジタルPID制御器153で制御電流地を計算し、位置制御および傾き制御に必要な電流をそれぞれの電磁石ごとに足し算して流す(D/Aコンバータ154)。
【0095】
<測定結果>
続いて、上述した本発明によるローレンツモータ1の特性について、実際に実験を行った結果に基づいて説明する。
【0096】
図22は、本発明によるローレンツモータ1の回転トルクを測定した実験結果を示すグラフであり、(a)は制御法1の実験結果であり、(b)は制御法2の実験結果である。図22において、横軸は消費電力、縦軸は回転トルクであり、回転数ごとの測定結果をグラフにしている。
【0097】
この実験によれば、例えば2600rpm時の制御法1での回転トルクは最大で4.5mNmであり、このときの消費電力は9.6Wであった。
【0098】
また、制御法2を用いた場合、最大で12.5mNmの回転トルクを発生可能であり、そのときの消費電力は21Wであった。
【0099】
図23は、本発明によるローレンツモータ1の傾き制御トルクを測定した実験結果を示すグラフである。図23において、横軸は励起電流、縦軸は傾き制御トルクであり、ロータ2とステータ3とのスペースすなわちエアギャップごとの測定結果をグラフにしている。
【0100】
実験によれば、モータ1では、エアギャップ1mm、2.5A励磁時に6.2mNmの傾き制御トルクの発生を確認できた。これにより、ロータ2とステータ3との傾きを制御する傾き制御が可能となる。
【0101】
<他の構成>
なお、上述の説明では、モータ1が扁平型モータの場合を例に説明したが、本発明はこれに限られるものではなく、例えば円筒型のモータにも適用可能である。この例を図24に示す。
【0102】
本発明は、図24に示す構成にも適用可能である。例えば、シリンダ状のロータの周りに縦長にステータ巻線を配置した構成において、本発明を適用することにより、ロータの回転と、ロータとステータとの傾き(ただし、本例の場合、ロータの径方向位置といった方がより適切)を制御可能とすることができる。
【0103】
以上、本発明を説明したが、本発明は、この説明に限定されるものではなく、本発明の趣旨を逸脱しない範囲で数々の変形および組み合わせが出来ることは勿論である。
【符号の説明】
【0104】
1 モータ
2 ロータ
3 ステータ
4 ロータマグネット
4a S極部
4b N極部
5 巻線
6 巻線
7 導線
【特許請求の範囲】
【請求項1】
ステータとロータとを有し、前記ステータと前記ロータとを対向配置し、前記ステータと前記ロータとの間に作用するローレンツ力によって前記ロータが前記ステータに対して回転するよう構成されたローレンツモータにおいて、
前記ロータは、前記ステータとの対向面に多極着磁したロータマグネットを有し、
前記ステータは、交番電流を流されることによって前記ロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによって前記ロータと前記ステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、
前記傾き・位置制御用巻線は、前記ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるものである
ことを特徴とするローレンツモータ。
【請求項2】
前記ステータと前記ロータとを平面対向型に構成して成ることを特徴とする請求項1に記載のローレンツモータ。
【請求項3】
前記ステータと前記ロータとを円筒型に構成して成ることを特徴とする請求項1に記載のローレンツモータ。
【請求項1】
ステータとロータとを有し、前記ステータと前記ロータとを対向配置し、前記ステータと前記ロータとの間に作用するローレンツ力によって前記ロータが前記ステータに対して回転するよう構成されたローレンツモータにおいて、
前記ロータは、前記ステータとの対向面に多極着磁したロータマグネットを有し、
前記ステータは、交番電流を流されることによって前記ロータを回転させるローレンツ力を生じさせる回転用巻線と、交番電流を流されることによって前記ロータと前記ステータとの傾きと位置を制御するローレンツ力を生じさせる傾き・位置制御用巻線とを有し、
前記傾き・位置制御用巻線は、前記ロータに多極着磁した所定の磁極と、該所定の磁極と隣接する異なる極の磁極との境界における、多極着磁した面と平行な向きの磁束と作用して傾き・位置制御用のローレンツ力を生じるものである
ことを特徴とするローレンツモータ。
【請求項2】
前記ステータと前記ロータとを平面対向型に構成して成ることを特徴とする請求項1に記載のローレンツモータ。
【請求項3】
前記ステータと前記ロータとを円筒型に構成して成ることを特徴とする請求項1に記載のローレンツモータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−102659(P2013−102659A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−246111(P2011−246111)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(503234229)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(503234229)
【Fターム(参考)】
[ Back to top ]