
ワイヤボンディング方法
【課題】第1ボンド点と第2ボンド点との接続において、ワイヤの強度低下を抑制しつつワイヤループの高さをより低くする。
【解決手段】ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点11に接合させて圧着ボール12を形成する第1ボンディング工程と、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点19の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを第2ボンド点19の方向に向かって押し込むワイヤ押込み工程と、キャピラリを上昇させ、続いてキャピラリを第2ボンド点19の方向に移動させてワイヤを第2ボンド点19に圧着させることにより接合する第2ボンディング工程と、を備える。
【解決手段】ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点11に接合させて圧着ボール12を形成する第1ボンディング工程と、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点19の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを第2ボンド点19の方向に向かって押し込むワイヤ押込み工程と、キャピラリを上昇させ、続いてキャピラリを第2ボンド点19の方向に移動させてワイヤを第2ボンド点19に圧着させることにより接合する第2ボンディング工程と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、第1ボンド点と第2ボンド点とをワイヤで接続するワイヤボンディング方法及び第1ボンド点と第2ボンド点とをワイヤで接続するワイヤループ形状を有する半導体装置に関する。
【背景技術】
【0002】
半導体装置の組立には、リードフレームに取り付けられた半導体チップのパッドとリードフレームのリードとの間を金属の細線で接続するワイヤボンディングが用いられている。ワイヤボンディングはワイヤボンディング装置を用い、最初にワイヤ先端にイニシャルボールを形成し、キャピラリによってそのイニシャルボールを半導体チップのパッドに圧着させて圧着ボールを形成する。そして、キャピラリを上昇させて第2ボンド点と反対側に向かってリバース動作させた後、更にキャピラリを所定の高さまで上昇させてからキャピラリを第2ボンド点の方向に移動させて第2ボンド点にワイヤを接続する方法が用いられている(例えば、特許文献1の図4から図6参照)。
【0003】
このように、キャピラリを動作させてワイヤをボンディングし、ワイヤループの形状を半導体チップのパッドに圧着した圧着ボールから上に伸びるワイヤネックと、ワイヤネックから第2ボンド点に向かって折り曲げられた傾斜部分とを含む三角形状或いは、ワイヤネックから第2ボンド点に向かって略水平に伸びる水平部分と水平部分から第2ボンド点に向かって伸びる傾斜部分とを含む台形形状とすることが多かった。これは、圧着ボールに近い部分を第2ボンド点に向かってキャピラリの水平方向に移動させると、移動中に発生するキャピラリと金属細線との間で発生する摩擦により、ネック部分にダメージを与えてしまう場合があるためでる。
【0004】
しかし、このワイヤループ形状は、圧着ボールから上方に立ち上がったワイヤネックを含むため、ワイヤループの高さが高くなってしまい、ワイヤボンディングによって組み立てられた半導体装置全体の高さ或いは厚さを小さく出来ないという問題があった。
【0005】
そこで、第1ボンド点にボンディングした後、キャピラリを若干上昇させて第2ボンド点と反対側に動かすリバース動作を行い、更にキャピラリを若干上昇させて第2ボンド点側に動かすフォワード動作させた後、キャピラリを降下させてワイヤネック部分を圧着ボールの上に折り返して押し付け、ワイヤの伸びる方向を水平或いは水平よりも若干上方向に向いた位置とした後、キャピラリの先端からワイヤを繰り出しながらキャピラリを上昇させ、続いてキャピラリを第2ボンド点に移動させてワイヤを第2ボンド点に接続する方法が提案されている。(例えば、特許文献1の図1から図3または特許文献2の図1から図3参照)。
【0006】
また、第1ボンド点と第2ボンド点とをボンディングするボンディング方法において、第1ボンド点に圧着ボールを形成した後、キャピラリを少し上昇させて第2ボンド点に向かって移動させ、キャピラリの上昇量よりも少ない量だけキャピラリを降下させてワイヤを押し下げ、次にキャピラリを上昇させてワイヤを繰り出しながらキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に接続する方法が提案されている(例えば、特許文献3の図1及び図2参照)。
【0007】
また、ワイヤループのアーチ高さがおよそ100μmの低ループを形成するワイヤボンディング方法として、第1ボンド点にボンディングして圧着ボールを形成した後、第1の上昇、第1の下降かつ平行移動、第2の上昇、第2の下降かつ平行移動を行った後、第2ボンド点にボンディングする方法が提案されている。この方法では、第1の上昇で必要とするワイヤループのアーチ高さの数倍の高さまで上昇させた後さらに第2の上昇でワイヤループの長さ分だけ動作させると共に第1、第2の下降かつ平行移動を弧状とすることが提案されている(例えば、特許文献4の図3参照)。
【0008】
また、第1ボンド点と第2ボンド点とをボンディングするボンディング方法において、第1ボンド点にボンディングして圧着ボールとボールネックを形成した後、キャピラリを第2ボンド点に向かって斜め上方に移動させてボールネックを斜めに傾斜させた後、キャピラリの上昇、水平移動によりワイヤを屈曲させる屈曲工程を複数回行った後、キャピラリを上昇させて第2ボンド点にルーピングし、第2ボンド点にボンディングを行う方法が提案されている(例えば、特許文献5の図1から図4参照)。
【0009】
【特許文献1】特開2004−172477号公報
【特許文献2】特開平9−51011号公報
【特許文献3】特開2005−39192号公報
【特許文献4】特開平8−316260号公報
【特許文献5】特許第4137061号明細書
【発明の開示】
【発明が解決しようとする課題】
【0010】
特許文献1または2に記載された従来技術によるボンディング方法では、圧着ボールの上にワイヤを折り返してヘッド部分を成形するため、第1ボンド点付近のワイヤを損傷する場合があるという問題があった。また、ヘッド部分の高さがさほど低くならず、全体のワイヤループ高さをより低くするという要求に対応することが出来ない場合があった。
【0011】
一方、特許文献3に記載された従来技術によるボンディング方法は、特許文献1または2に記載された方法のように圧着ボールの上にワイヤを折り返したヘッド部分を形成せず、圧着ボールに接続する部分のワイヤを第2ボンド点に向かって曲げてワイヤを第2ボンド点に接続するものであることから、特許文献1または2に記載された方法よりもワイヤループ全体の高さを低くすることができる。また、特許文献5に記載された従来技術によるボンディング方法は、第1ボンド点付近のワイヤに与える損傷を抑制してワイヤループ高さを低くすることが出来る。
【0012】
しかし、特許文献3に記載された従来技術のボンディング方法は、圧着ボールに接続される部分のワイヤをキャピラリによって第2ボンド点に向かって水平方向に押した後、キャピラリをキャピラリの上昇量よりも少ない量だけ押し下げることとしていることから、キャピラリを水平移動させる際にキャピラリとワイヤとの摩擦力によって、圧着ボールに接続されている部分のワイヤをワイヤの軸方向に引っ張ってしまう場合がある。そして、このようにワイヤが引っ張られると、圧着ボールに接続されている部分のワイヤの断面積が小さくなり、ワイヤの強度が低下してしまい、ワイヤの断線につながる場合があるという問題があった。同様に、特許文献5に記載された従来技術のボンディング方法でも、キャピラリを第2ボンド点の方向に向かって水平移動させるので、キャピラリとワイヤとの摩擦力によって、圧着ボールに接続されている部分のワイヤを引っ張ってしまい、ワイヤ強度が低下するという問題があった。
【0013】
また、特許文献4に記載されている従来技術のボンディング方法は、上昇させたキャピラリを弧状軌跡で下降かつ平行移動させるようにしていることから、特許文献3及び特許文献5に記載された従来技術のようなワイヤの強度の低下は抑制することができるが、ワイヤループの高さがおよそ100μm程度の低ループしか形成できず、より低いワイヤループを形成することが困難であるという問題があった。
【0014】
そこで、本発明は、第1ボンド点と第2ボンド点との接続において、ワイヤの強度低下を抑制しつつワイヤループの高さをより低くすることを目的とする。
【課題を解決するための手段】
【0015】
本発明のワイヤボンディング方法は、第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤボンディング方法であって、ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、を含むことを特徴とする。
【0016】
本発明のワイヤボンディング方法において、連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいこと、としても好適であるし、連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、としても好適である。
【0017】
また、本発明のワイヤボンディング方法において、連続動作のキャピラリの円弧状移動は、前回連続動作のキャピラリの円弧状移動の終了点を中心とする円弧動作であること、としても好適であるし、連続動作の第1回目のキャピラリの円弧状移動の際の移動角度は、第2回目のキャピラリの円弧状移動の際の移動角度よりも大きいこと、としても好適である。
【0018】
また、本発明のワイヤボンディング方法において、上昇円弧状動作の円弧状の移動は、円弧を複数の直線で近似した近似折線に沿ってキャピラリが移動すること、としても好適であるし、連続動作の第3回目以降のキャピラリの上昇量は、第1回目及び第2回目のキャピラリの上昇量よりも大きいこと、としても好適である。
【0019】
また、本発明のワイヤボンディング方法において、ワイヤ押し込み工程と第2ボンディング工程との間に、キャピラリを上昇させ、続いてキャピラリを第2ボンド点と反対方向に移動させるリバース動作を少なくとも1回行い、ワイヤにキンクを形成するキンク形成工程を含むこと、としても好適である。
【0020】
本発明の半導体装置は、第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤループ形状を有する半導体装置であって、ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、により形成するワイヤループ形状を有することを特徴とする。
【0021】
本発明の半導体装置において、連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいこと、としても好適であるし、連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、としても好適である。
【発明の効果】
【0022】
本発明は、第1ボンド点と第2ボンド点との接続において、ワイヤの強度の低下を抑制しつつワイヤループの高さをより低くすることが出来るという効果を奏する。
【発明を実施するための最良の形態】
【0023】
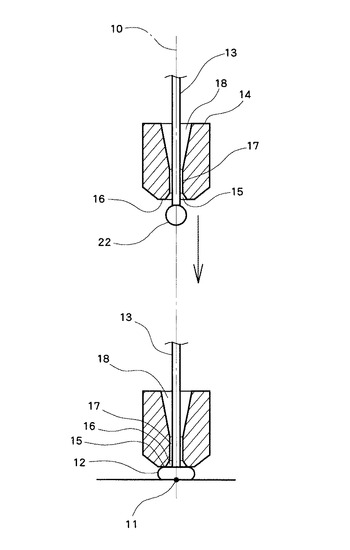
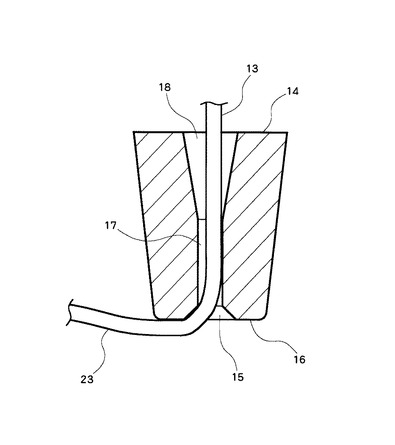
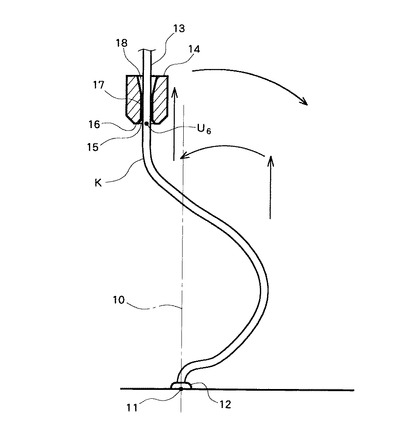
以下、本発明のボンディング方法とそのボンディング方法によって形成したワイヤループを有する半導体装置の好適な実施形態について図面を参照しながら説明する。半導体装置には複数の第1ボンド点と第2ボンド点とを接続するワイヤループが形成されるが、以下の説明では、1つの第1ボンド点と1つの第2ボンド点との接続について説明する。図1に示すように、キャピラリ14に挿通したワイヤ13の先端に図示しないトーチ等によってイニシャルボール22を形成した後、図1に示す矢印のように第1ボンド点11の中心線10に沿ってキャピラリ14を降下させる。そして、キャピラリ14の先端のフェイス部16とインナチャンファ部15によってイニシャルボール22を第1ボンド点11に押し付けて接合させて、第1ボンド点11の上に圧着ボール12を形成する。圧着ボール12はキャピラリ14の押し付けによって第1ボンド点11に圧着されている(第1ボンディング工程)。
【0024】
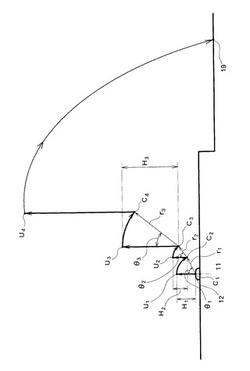
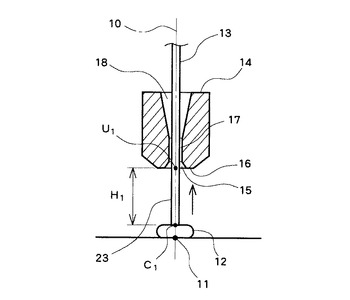
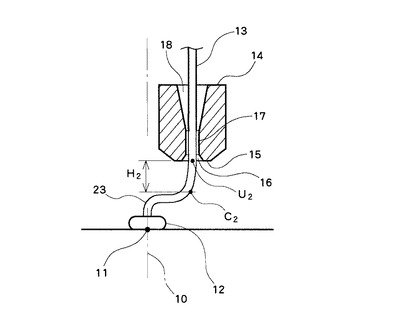
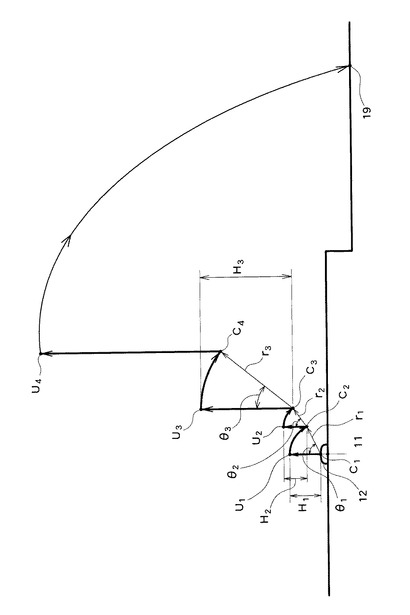
図2及び図12に示すように、キャピラリ14を高さH1だけ中心線10に沿って垂直に上昇させて第1回目の連続動作を開始する。キャピラリ14が上昇し終わると、キャピラリ14の先端は圧着ボール12の上面から高さH1の点U1に位置している。
【0025】
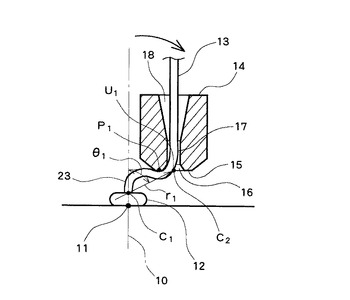
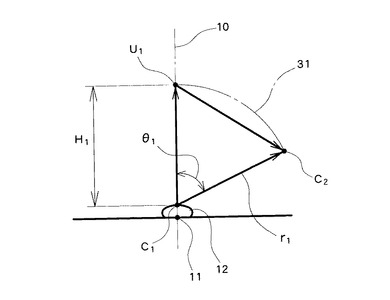
図3及び図12に示すように、圧着ボール12の上面と中心線10との交点にある点C1を中心とし、図2に示した高さH1を半径r1とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ1だけ円弧状に移動させる。角度θ1は90度よりも小さく、例えば45度程度の角度である。キャピラリ14の第1回目の円弧移動が終了すると、キャピラリ14の先端は、点U1よりも第2ボンド点19側で、点U1と点C1との間の高さにある点C2に位置している。つまり、キャピラリ14は円弧移動によって点U1と点C2との高さの差の分だけ点U1から降下し、点U1から第2ボンド点19の方向に移動している。点U1と点C2との高さの差は図2に示したキャピラリ14の上昇高さH1よりも小さいので、キャピラリ14の先端は、第1回目の円弧動作によってキャピラリ14の上昇量H1よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってネックワイヤ23を第2ボンド点19に向かって緩やかに曲げると共に、ネックワイヤ23を斜め下向きに押込んで水平方向へルーピングするための1つ目の癖をつける(ワイヤ押込み工程)。
【0026】
キャピラリ14が第1回目の円弧動作を行う際、図3Aに示すように、ネックワイヤ23はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に、キャピラリ14のフェイス部16によって下向きに押込まれる。この際、キャピラリ14は点C1を中心に円弧状に移動しているので、点C1とキャピラリ14の先端との間の距離はほとんど変化せず一定に保持される。このため、キャピラリ14を点U1から点C2に向かって斜め下向きに移動させる際に、キャピラリ14によってネックワイヤ23をその軸方向に引っ張ってしまうことが無くなり、図2に示すネックワイヤ23に引っ張り荷重が掛かることが抑制される。そして、ネックワイヤ23が引っ張り荷重によって細くなってしまい、ネックワイヤ23の強度が低下することを抑制することが出来る。
【0027】
また、ワイヤ13の先端にイニシャルボール22を形成する際にはワイヤ13の先端をトーチ等により放電して加熱するため、その熱によってワイヤ13が熱硬化する場合が多く、ネックワイヤ23にはこの熱硬化が残ることが多い。熱硬化する長さはワイヤ13の径やイニシャルボール22の径等によって異なることが多いが、圧着ボール12の上面から50から100μm程度のことが多い。第1回目の円弧動作によってキャピラリ14によってネックワイヤ23の押込みを行う際、ネックワイヤ23の熱硬化部分を押込むと、押込み深さが大きすぎるとネックワイヤ23の硬化部分に損傷が発生する場合があり、逆に押込み深さが小さすぎると、ネックワイヤ23を押込んでも、硬化部分が水平方向になじまず、上方向に向かって反発してしまい、ワイヤループ全体の高さを低く出来ないことがある。そこで、第1回目の連続動作の際のキャピラリ14の上昇高さH1をネックワイヤ23の熱硬化部分より少し上までとし、円弧動作の半径r1を大きくして、ネックワイヤ23を緩やかに曲げて損傷を抑制すると共に、キャピラリ14の第1回目の円弧動作によってネックワイヤ23の硬化部分の上の硬化していない部分が水平方向に向かって伸びるようにしてもよい。これによって、ネックワイヤ23の損傷を抑制すると共に、ワイヤループ全体の高さを低くすることができる。
【0028】
図2、図3に示した第1回目のキャピラリ14の上昇動作と円弧動作の連続動作が終了すると、図4、図5に示すように、第2回目の連続動作を開始する。図4に示すように、キャピラリ14の先端を第1回目のキャピラリ14の円弧動作が終了する点C2から略垂直に高さH2だけ上昇させる。キャピラリ14が上昇し終わると、キャピラリ14の軸方向中心の先端は点C2から高さH2の点U2に位置している。この際、キャピラリ14の上昇高さH2は第1回目のキャピラリ14の上昇高さH1よりも小さくしてもよい。
【0029】
図5及び図12に示すように、第1回目のキャピラリ14の円弧動作が終了する点C2を中心とし、図4に示した高さH2を半径r2とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ2だけ円弧状に移動させる。角度θ2は90度よりも小さく、例えば45度程度の角度である。また、角度θ2は角度θ1よりも小さい角度であってもよい。キャピラリ14の第2回目の円弧移動が終了すると、キャピラリ14の軸方向中心の先端は、点U2よりも第2ボンド点19側で、点U2と点C2との間の高さにある点C3に位置している。つまり、キャピラリ14は円弧移動によって点U2と点C3との高さの差の分だけ点U2から降下し、点U2から第2ボンド点19の方向に移動している。点U2と点C3との高さの差は図4に示したキャピラリ14の上昇高さH2よりも小さいので、キャピラリ14の先端は、円弧動作によってキャピラリ14の上昇量H2よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってワイヤ13を再び第2ボンド点19に向かって曲げると共に、ワイヤ13を下向きに押込んで水平方向へルーピングするための2つ目の癖をつける。キャピラリ14の上昇高さH2を第1回目のキャピラリ14の上昇高さH1よりも小さくした場合には、曲げ半径r2も小さくなり、ワイヤ13への押し付け力を大きくすることができる。第2回目の円弧動作では、ワイヤ13が硬化していない部分を第2ボンド点19に向かって曲げると共にワイヤ13を斜め下向きに押込むので、曲げ半径r2を小さくして押し付け力を大きくすることによってワイヤ13に水平方向に伸びる癖を効果的につけることが出来る(ワイヤ押込み工程)。
【0030】
キャピラリ14が第2回目の円弧動作を行う際、図5Aに示すように、ワイヤ13はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に下向きに押込まれる。第1回目の円弧動作と同様、キャピラリ14は点C2を中心に円弧状に移動しているので、点C2とキャピラリ14の軸方向の中心の先端と点C2との間の距離はほとんど変化せず一定に保持される。このため、キャピラリ14を点U2から点C3に向かって斜め下向きに移動させる際に、キャピラリ14によってワイヤ13をその軸方向に引っ張ってしまうことが無くなり、ワイヤ13が引っ張り荷重によって細くなり、その強度が低下することを抑制することができる。
【0031】
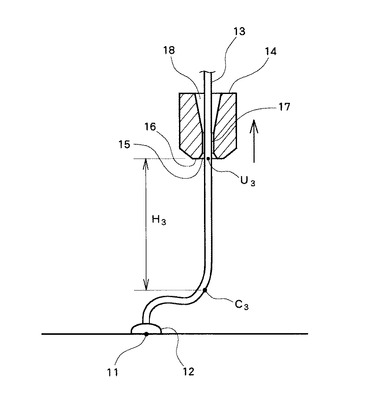
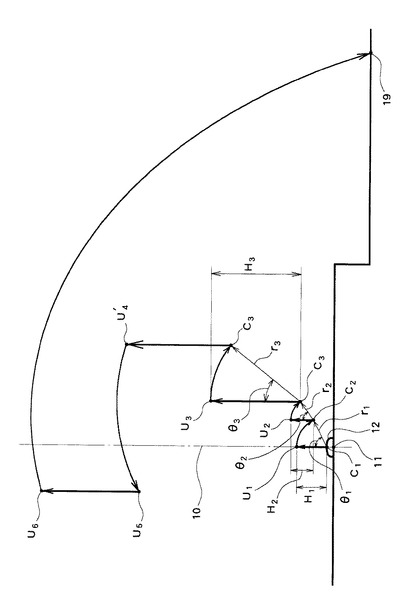
図4、図5に示した第2回目のキャピラリ14の上昇動作と円弧動作の連続動作が終了すると、図6、図7に示すように、第3回目の連続動作を開始する。図6に示すように、キャピラリ14の先端を第2回目のキャピラリ14の円弧動作が終了する点C3から略垂直に高さH3だけ上昇させる。キャピラリ14が上昇し終わると、キャピラリ14の軸方向中心の先端は点C3から高さH3の点U3に位置している。第3回目の連続動作は圧着ボール12から離れた位置で少しだけワイヤ13を斜め下向きに押込めばよいので、キャピラリ14の上昇高さH3は、ワイヤループ21の全体形状によって決まる長さであるが、第1回目のキャピラリ14の上昇高さH1、第2回目の上昇高さH2よりも大きくしてもよい。
【0032】
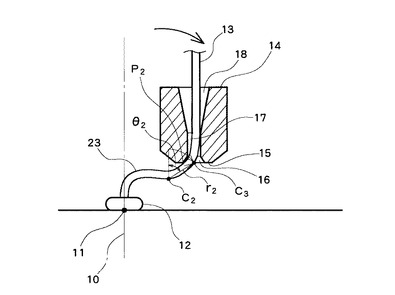
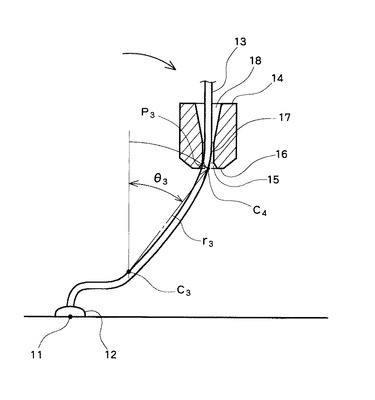
図7及び図12に示すように、第2回目のキャピラリ14の円弧動作が終了する点C3を中心とし、図6に示した高さH3を半径r3とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ3だけ円弧状に移動させる。角度θ3は90度よりも小さく、例えば45度程度の角度である。また、角度θ3は角度θ1、角度θ2よりも小さい角度であってもよい。キャピラリ14の第3回目の円弧移動が終了すると、キャピラリ14の軸方向中心の先端は、点U3よりも第2ボンド点19側で、点U3と点C3との間の高さにある点C4に位置している。キャピラリ14は円弧移動によって点U3と点C4との高さの差の分だけ点U3から降下し、点U3から第2ボンド点19の方向に移動している。点U3と点C4との高さの差は図6に示したキャピラリ14の上昇高さH3よりも小さいので、キャピラリ14の先端は、円弧動作によってキャピラリ14の上昇量H3よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってワイヤ13を再び第2ボンド点19に向かって緩やかに曲げると共に、ワイヤ13を斜め下向きに押込んで水平方向へルーピングするための3つ目の癖をつける。この3つ目の癖は、1つ目、2つ目の癖よりも小さな癖でよい(ワイヤ押込み工程)。
【0033】
キャピラリ14が第3回目の円弧動作を行う際には第2回目の円弧動作と同様、ワイヤ13はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に下向きに押込まれる。第1回目、第2回目の円弧動作と同様、キャピラリ14は点C3を中心に円弧状に移動しているので、キャピラリ14によってワイヤ13をその軸方向に引っ張ってしまうことが無くなり、ワイヤ13が引っ張り荷重によって細くなり、その強度が低下することを抑制することができる。
【0034】
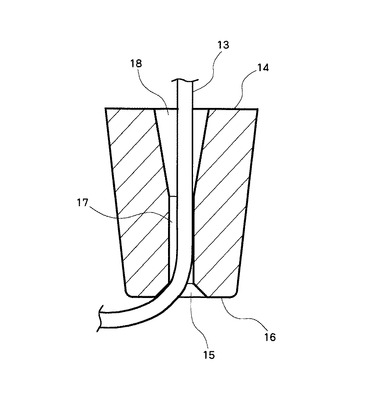
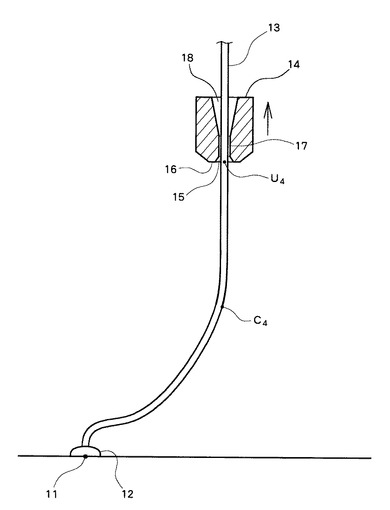
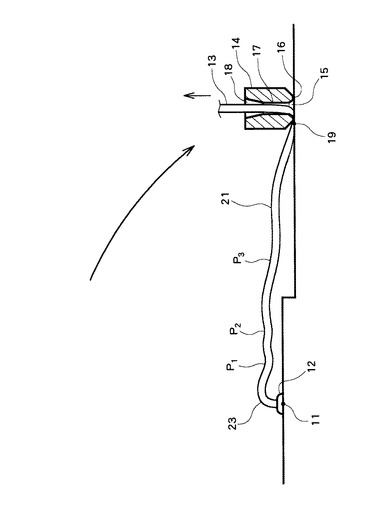
以上、説明した第1回目の連続動作から第3回目の連続動作が終了すると、図8に示すように、キャピラリ14の先端を点C4の位置から略垂直に上昇させる。上昇が終了すると、キャピラリ14の先端の位置は点U4に上昇している。そして、図9に示すように、キャピラリ14の先端を点U4から第2ボンド点19に向かって移動させ、キャピラリ14のフェイス部16によってワイヤ13を第2ボンド点19に圧着させることにより接合する。そして、キャピラリ14と共にワイヤ13を引き上げることによって、第2ボンド点19でワイヤ13を切断し、第1ボンド点11と第2ボンド点19とを結ぶワイヤループ21を形成する(第2ボンディング工程)。複数の第1ボンド点11と第2ボンド点19との接続が全て終了し、各第1ボンド点11と第2ボンド点19との間のワイヤループ21が形成されると半導体装置の組みたてが終了する。
【0035】
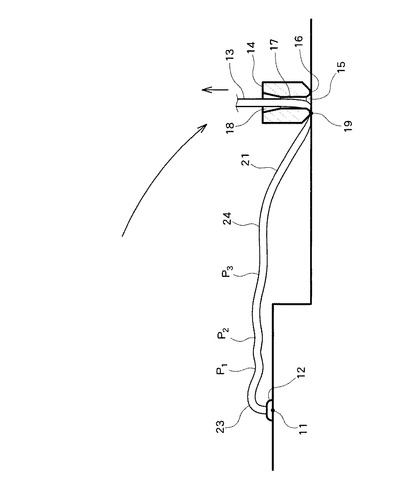
図9に示すように、本実施形態のワイヤボンディング方法によって形成された半導体装置のワイヤループ21は、ネックワイヤ23の部分が圧着ボール12の上面から第2ボンド点19に向かって水平方向よりやや下向きまで曲がり、第1回目の連続動作によってつけた癖の位置P1からわずかに上に向かって伸びた後第2回目の連続動作によってつけた癖の位置P2までわずかに下向きに伸び、第2回目の連続動作によってつけた癖の位置P2からわずかに上に向かって伸びた後第3回目の連続動作によってつけた癖の位置P3までわずかに下向きに伸びて第2ボンド点19につながっている。このように、本実施形態のワイヤボンディング方法では、圧着ボール12に続くネックワイヤ23またはワイヤ13を第2ボンド点19に向かって曲げると共に、ワイヤを斜め下向きに押込んで、曲げの後のワイヤの跳ね上がりを押さえ、ワイヤループ21全体の高さを低くすることができる。また、先に述べたように、キャピラリ14を第2ボンド点19に向かって斜め下方向に移動させる際に、キャピラリ14を円弧移動させているので、ネックワイヤ23やワイヤ13を引っ張って細く変形させることを抑制できるので、半導体装置のワイヤループ21の強度の低下を抑制することができる。
【0036】
また、本実施形態では、連続動作は3回として説明したが、連続動作は複数回であれば、3回に限らず、2回でも4回以上であってもよい。
【0037】
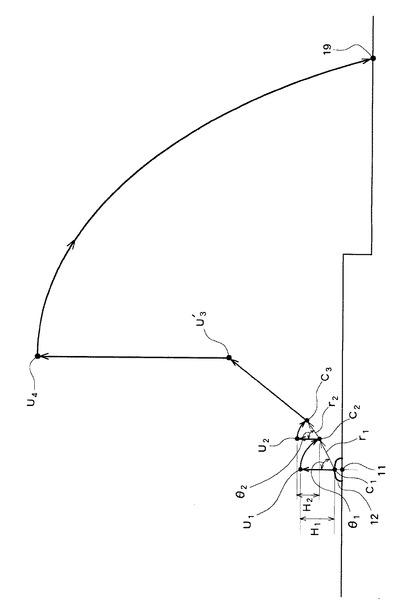
図13を参照して連続動作が2回の場合の実施形態について説明する。図1から図9、図12を参照して説明した実施形態と同様の部分には同様の符号を付して説明は省略する。図13に示すように、本実施形態では、先に説明した実施形態と同様に第1ボンド点11に圧着ボール12を形成した後、キャピラリ14の先端を点C1から点U1、点C2、点U2、点C3、と移動させた後、点C3から点U3´に向けてキャピラリ14を第2ボンド点19に向かって斜め上方に移動させた後、点U3´から点U4に向かってキャピラリ14を略垂直に上昇させ、第2ボンド点19に向かってルーピングし、第2ボンド点19にボンディングを行う。
【0038】
本実施形態では、連続動作を2回とし、2回目の連続動作の終了後キャピラリ14を斜め上方に移動させている。先に説明した実施形態では連続動作を3回行ってワイヤ13を3回押し付けているが、本実施形態のように、2回目の連続動作の後キャピラリ14を斜め上方に移動させ、その後、略垂直に上昇させることでもある程度ワイヤ13に3つ目の癖をつけることができるため、半導体装置のワイヤループ21の長さによっては同様の形状のループを形成することが出来るためである。また、半導体装置のワイヤループ21の全体長さが短い場合などは、本実施形態のようにキャピラリ14を斜め上方に移動させず、2回目の連続動作の後すぐに略垂直に上昇させた後、第2ボンド点19に向かってルーピングするようにしてもよい。
【0039】
図10、図11、図14を参照して他の実施形態について説明する。先に説明した実施形態と同様の部分については、同様の符号を付して説明は省略する。図10、図14に示すように、本実施形態のワイヤボンディング方法は、先に説明した実施形態と同様に、第1回から第3回の連続動作を行った後、図10及び図14に示すように、キャピラリ14の先端を略垂直に点U´4まで上昇させた後、第1ボンド点11の中心線10よりも第2ボンド点19と反対側の点U5までキャピラリ14をリバース動作させる(キンク形成工程)。そして、再びキャピラリ14の先端を点U6まで上昇させる。そして、その後キャピラリ14を第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するものである。
【0040】
本実施形態は先に説明した実施形態と同様、半導体装置のワイヤループ21の強度の低下を抑制すると同時に半導体装置のワイヤループ全体の高さを低くすることが出来ると共に、リバース動作によってワイヤ13にキンクKをつけることができる。このキンクKはワイヤ13を第2ボンド点19にボンディングしてワイヤループ21を形成した際、図11に示すように、位置P3から略水平に伸びるワイヤ13を第2ボンド点19に向かって斜め下向きに屈曲させる屈曲部24を形成する。この屈曲部24は、ワイヤループ21の形状を台形状にして、第1ボンド点11と第2ボンド点19との間に段差がある場合、ワイヤループ21が段差に接触して短絡を起こさないようにすると共に、ワイヤループ21の変形に対する強度を大きくすることが出来るため、例えば、樹脂注入の際のワイヤループ21の変形、切断或いはワイヤボンディングの際の冷却空気によるワイヤループ21の変形、ショートなどを抑制することが出来、ボンディング品質を向上させることができる。本実施形態では、1つのキンクKを形成することとして説明したが、上昇、リバース動作を複数回行って、キンクKを複数設け、ワイヤループ21に複数の屈曲部24を形成するようにしてもよい。
【0041】
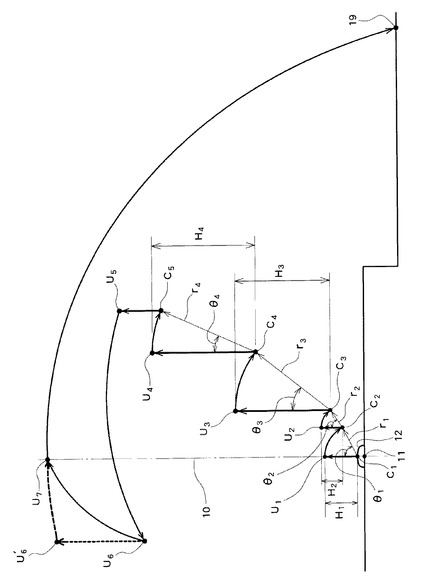
図15、図16を参照して他の実施形態について説明する。本実施形態は先に説明した実施形態よりも長いワイヤループ21を形成するものである。先に説明した実施形態と同様の部分については、同様の符号を付して説明は省略する。図15に示すように、本実施形態のワイヤボンディング方法は、先に説明した実施形態と同様に、第1回から第3回の連続動作を行った後、更に第4回目の連続動作を行い、キャピラリ14の先端をC4から点U4に上昇させ、点U4から点C5まで角度θ4だけ円弧状に移動させ、ワイヤ13を4回押し付けてから、図15に示すように、キャピラリ14の先端を略垂直に点U5まで上昇させた後、第1ボンド点11の中心線10よりも第2ボンド点19と反対側の点U6までキャピラリ14をリバース動作させる(キンク形成工程)。そして、再びキャピラリ14の先端をボンディングの中心軸10の上に位置している点U7まで斜め上方に第2ボンド点19に向かって移動させた後、キャピラリ14を点U7から第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するものである。
【0042】
図15に示した実施形態では、キャピラリ14の先端を点U6から斜め上方に点U7に移動させた後、点U7から第2ボンド点19に向かって移動させることとして説明したが、図15の点線に出示すように、キャピラリ14の先端を点U6から点U6´まで略垂直に上昇させ、その後キャピラリ14を第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するようにしてもよい。
【0043】
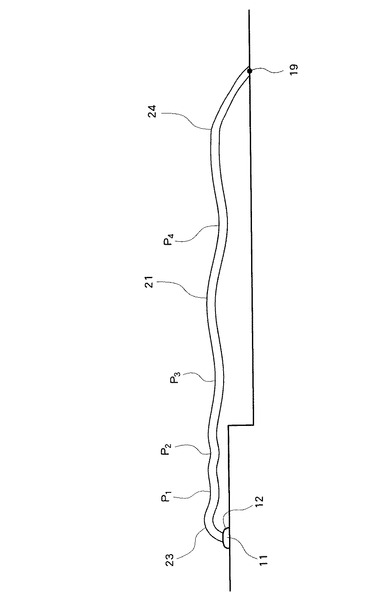
図16に示すように、本実施形態によって形成した半導体装置のワイヤループ21は、先の実施形態と同様に位置P1から位置P3の3つの位置の癖と、屈曲部24が形成されている他、P3と第2ボンド点19との間の位置P4に第4回目の連続動作によってつけた癖がついている。図16に示すように、ワイヤループ21の長さが長い場合には、位置P3に3つ目の癖をつけてもワイヤの上方への跳ね上がりによりワイヤループ21の全体高さを低くできない場合があるが、跳ね上がりによりループ高さが高くなると想定される位置P4に4つ目の癖をつけることで位置P3につけた3つ目の癖の第2ボンド点19側にあるワイヤが上方に跳ね上がることを抑制できるので、ワイヤループ21の長さが長い場合でもワイヤループ21の全体高さを均一に低くすることができる。
【0044】
図17を参照しながら本発明の他の実施形態について説明する。先に図1から図9、図12を参照して説明した実施形態では、キャピラリ14を第2ボンド点19に向かって斜め下向きに移動させる際にキャピラリ14の先端を円弧状に移動させることとして説明したが、キャピラリ14の上昇高さH1〜H3があまり大きくない場合、或いは円弧移動の際の回転角度θ1からθ3があまり大きくない場合には、キャピラリ14の先端を円弧動作させずに、図17に示すように、点U1から点C2まで直線動作させることとしてもよい。キャピラリ14の上昇高さH1〜H3が小さく円弧移動の際の回転角度θ1からθ3が小さい場合には、斜め移動に際の点C1とキャピラリ14の先端との距離の差が小さく、キャピラリ14によってネックワイヤ23或いはワイヤ13に掛かる軸方向の力が大きくならず、その変形による強度の低下も小さいためである。本実施形態は先に説明した実施形態のようにキャピラリ14の先端を円弧状に移動させなくともよいことからボンディング装置の制御を簡便にすることができる。
【0045】
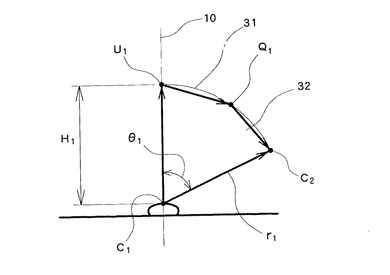
また、図18に示すように、点U1から点C2までキャピラリ14の先端を移動させる場合に、キャピラリ14の上昇高さH1と同様の半径r1の円弧31の弦を結んだ近似折線32に沿ってキャピラリ14の先端を移動させてもよい。この際キャピラリ14の先端は、点U1から点Q1、点C2と順次直線的に移動していく。本実施形態も先に説明した実施形態同様、ボンディング装置を簡便にすることが出来る。
【図面の簡単な説明】
【0046】
【図1】本発明の実施形態におけるワイヤボンディング方法の第1ボンディング工程を示す説明図である。
【図2】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第1回目の連続動作を示す説明図である。
【図3】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第1回目の連続動作を示す説明図である。
【図3A】図3に示す動作中のキャピラリとワイヤと示す拡大図である。
【図4】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第2回目の連続動作を示す説明図である。
【図5】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第2回目の連続動作を示す説明図である。
【図5A】図5に示す動作中のキャピラリとワイヤと示す拡大図である。
【図6】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第3回目の連続動作を示す説明図である。
【図7】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第3回目の連続動作を示す説明図である。
【図8】本発明の実施形態におけるワイヤボンディング方法の第2ボンディング工程を示す説明図である。
【図9】本発明の実施形態におけるワイヤボンディング方法の第2ボンディング工程と本発明の実施形態のワイヤループを示す説明図である。
【図10】本発明の他の実施形態におけるワイヤボンディング方法のキンク作成工程を示す説明図である。
【図11】本発明の他の実施形態におけるワイヤボンディング方法の第2ボンディング工程と本発明の他の実施形態のワイヤループを示す説明図である。
【図12】本発明の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図13】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図14】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図15】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図16】本発明の他の実施形態におけるワイヤボンディング方法で形成したワイヤループの形状を示す説明図である。
【図17】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図18】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【符号の説明】
【0047】
10 中心線、11 第1ボンド点、12 圧着ボール、13 ワイヤ、14 キャピラリ、15 インナチャンファ部、16 フェイス部、19 第2ボンド点、21 ワイヤループ、22 イニシャルボール、23 ネックワイヤ、24 屈曲部、31 円弧、32 近似折線。
【技術分野】
【0001】
本発明は、第1ボンド点と第2ボンド点とをワイヤで接続するワイヤボンディング方法及び第1ボンド点と第2ボンド点とをワイヤで接続するワイヤループ形状を有する半導体装置に関する。
【背景技術】
【0002】
半導体装置の組立には、リードフレームに取り付けられた半導体チップのパッドとリードフレームのリードとの間を金属の細線で接続するワイヤボンディングが用いられている。ワイヤボンディングはワイヤボンディング装置を用い、最初にワイヤ先端にイニシャルボールを形成し、キャピラリによってそのイニシャルボールを半導体チップのパッドに圧着させて圧着ボールを形成する。そして、キャピラリを上昇させて第2ボンド点と反対側に向かってリバース動作させた後、更にキャピラリを所定の高さまで上昇させてからキャピラリを第2ボンド点の方向に移動させて第2ボンド点にワイヤを接続する方法が用いられている(例えば、特許文献1の図4から図6参照)。
【0003】
このように、キャピラリを動作させてワイヤをボンディングし、ワイヤループの形状を半導体チップのパッドに圧着した圧着ボールから上に伸びるワイヤネックと、ワイヤネックから第2ボンド点に向かって折り曲げられた傾斜部分とを含む三角形状或いは、ワイヤネックから第2ボンド点に向かって略水平に伸びる水平部分と水平部分から第2ボンド点に向かって伸びる傾斜部分とを含む台形形状とすることが多かった。これは、圧着ボールに近い部分を第2ボンド点に向かってキャピラリの水平方向に移動させると、移動中に発生するキャピラリと金属細線との間で発生する摩擦により、ネック部分にダメージを与えてしまう場合があるためでる。
【0004】
しかし、このワイヤループ形状は、圧着ボールから上方に立ち上がったワイヤネックを含むため、ワイヤループの高さが高くなってしまい、ワイヤボンディングによって組み立てられた半導体装置全体の高さ或いは厚さを小さく出来ないという問題があった。
【0005】
そこで、第1ボンド点にボンディングした後、キャピラリを若干上昇させて第2ボンド点と反対側に動かすリバース動作を行い、更にキャピラリを若干上昇させて第2ボンド点側に動かすフォワード動作させた後、キャピラリを降下させてワイヤネック部分を圧着ボールの上に折り返して押し付け、ワイヤの伸びる方向を水平或いは水平よりも若干上方向に向いた位置とした後、キャピラリの先端からワイヤを繰り出しながらキャピラリを上昇させ、続いてキャピラリを第2ボンド点に移動させてワイヤを第2ボンド点に接続する方法が提案されている。(例えば、特許文献1の図1から図3または特許文献2の図1から図3参照)。
【0006】
また、第1ボンド点と第2ボンド点とをボンディングするボンディング方法において、第1ボンド点に圧着ボールを形成した後、キャピラリを少し上昇させて第2ボンド点に向かって移動させ、キャピラリの上昇量よりも少ない量だけキャピラリを降下させてワイヤを押し下げ、次にキャピラリを上昇させてワイヤを繰り出しながらキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に接続する方法が提案されている(例えば、特許文献3の図1及び図2参照)。
【0007】
また、ワイヤループのアーチ高さがおよそ100μmの低ループを形成するワイヤボンディング方法として、第1ボンド点にボンディングして圧着ボールを形成した後、第1の上昇、第1の下降かつ平行移動、第2の上昇、第2の下降かつ平行移動を行った後、第2ボンド点にボンディングする方法が提案されている。この方法では、第1の上昇で必要とするワイヤループのアーチ高さの数倍の高さまで上昇させた後さらに第2の上昇でワイヤループの長さ分だけ動作させると共に第1、第2の下降かつ平行移動を弧状とすることが提案されている(例えば、特許文献4の図3参照)。
【0008】
また、第1ボンド点と第2ボンド点とをボンディングするボンディング方法において、第1ボンド点にボンディングして圧着ボールとボールネックを形成した後、キャピラリを第2ボンド点に向かって斜め上方に移動させてボールネックを斜めに傾斜させた後、キャピラリの上昇、水平移動によりワイヤを屈曲させる屈曲工程を複数回行った後、キャピラリを上昇させて第2ボンド点にルーピングし、第2ボンド点にボンディングを行う方法が提案されている(例えば、特許文献5の図1から図4参照)。
【0009】
【特許文献1】特開2004−172477号公報
【特許文献2】特開平9−51011号公報
【特許文献3】特開2005−39192号公報
【特許文献4】特開平8−316260号公報
【特許文献5】特許第4137061号明細書
【発明の開示】
【発明が解決しようとする課題】
【0010】
特許文献1または2に記載された従来技術によるボンディング方法では、圧着ボールの上にワイヤを折り返してヘッド部分を成形するため、第1ボンド点付近のワイヤを損傷する場合があるという問題があった。また、ヘッド部分の高さがさほど低くならず、全体のワイヤループ高さをより低くするという要求に対応することが出来ない場合があった。
【0011】
一方、特許文献3に記載された従来技術によるボンディング方法は、特許文献1または2に記載された方法のように圧着ボールの上にワイヤを折り返したヘッド部分を形成せず、圧着ボールに接続する部分のワイヤを第2ボンド点に向かって曲げてワイヤを第2ボンド点に接続するものであることから、特許文献1または2に記載された方法よりもワイヤループ全体の高さを低くすることができる。また、特許文献5に記載された従来技術によるボンディング方法は、第1ボンド点付近のワイヤに与える損傷を抑制してワイヤループ高さを低くすることが出来る。
【0012】
しかし、特許文献3に記載された従来技術のボンディング方法は、圧着ボールに接続される部分のワイヤをキャピラリによって第2ボンド点に向かって水平方向に押した後、キャピラリをキャピラリの上昇量よりも少ない量だけ押し下げることとしていることから、キャピラリを水平移動させる際にキャピラリとワイヤとの摩擦力によって、圧着ボールに接続されている部分のワイヤをワイヤの軸方向に引っ張ってしまう場合がある。そして、このようにワイヤが引っ張られると、圧着ボールに接続されている部分のワイヤの断面積が小さくなり、ワイヤの強度が低下してしまい、ワイヤの断線につながる場合があるという問題があった。同様に、特許文献5に記載された従来技術のボンディング方法でも、キャピラリを第2ボンド点の方向に向かって水平移動させるので、キャピラリとワイヤとの摩擦力によって、圧着ボールに接続されている部分のワイヤを引っ張ってしまい、ワイヤ強度が低下するという問題があった。
【0013】
また、特許文献4に記載されている従来技術のボンディング方法は、上昇させたキャピラリを弧状軌跡で下降かつ平行移動させるようにしていることから、特許文献3及び特許文献5に記載された従来技術のようなワイヤの強度の低下は抑制することができるが、ワイヤループの高さがおよそ100μm程度の低ループしか形成できず、より低いワイヤループを形成することが困難であるという問題があった。
【0014】
そこで、本発明は、第1ボンド点と第2ボンド点との接続において、ワイヤの強度低下を抑制しつつワイヤループの高さをより低くすることを目的とする。
【課題を解決するための手段】
【0015】
本発明のワイヤボンディング方法は、第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤボンディング方法であって、ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、を含むことを特徴とする。
【0016】
本発明のワイヤボンディング方法において、連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいこと、としても好適であるし、連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、としても好適である。
【0017】
また、本発明のワイヤボンディング方法において、連続動作のキャピラリの円弧状移動は、前回連続動作のキャピラリの円弧状移動の終了点を中心とする円弧動作であること、としても好適であるし、連続動作の第1回目のキャピラリの円弧状移動の際の移動角度は、第2回目のキャピラリの円弧状移動の際の移動角度よりも大きいこと、としても好適である。
【0018】
また、本発明のワイヤボンディング方法において、上昇円弧状動作の円弧状の移動は、円弧を複数の直線で近似した近似折線に沿ってキャピラリが移動すること、としても好適であるし、連続動作の第3回目以降のキャピラリの上昇量は、第1回目及び第2回目のキャピラリの上昇量よりも大きいこと、としても好適である。
【0019】
また、本発明のワイヤボンディング方法において、ワイヤ押し込み工程と第2ボンディング工程との間に、キャピラリを上昇させ、続いてキャピラリを第2ボンド点と反対方向に移動させるリバース動作を少なくとも1回行い、ワイヤにキンクを形成するキンク形成工程を含むこと、としても好適である。
【0020】
本発明の半導体装置は、第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤループ形状を有する半導体装置であって、ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、により形成するワイヤループ形状を有することを特徴とする。
【0021】
本発明の半導体装置において、連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいこと、としても好適であるし、連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、としても好適である。
【発明の効果】
【0022】
本発明は、第1ボンド点と第2ボンド点との接続において、ワイヤの強度の低下を抑制しつつワイヤループの高さをより低くすることが出来るという効果を奏する。
【発明を実施するための最良の形態】
【0023】
以下、本発明のボンディング方法とそのボンディング方法によって形成したワイヤループを有する半導体装置の好適な実施形態について図面を参照しながら説明する。半導体装置には複数の第1ボンド点と第2ボンド点とを接続するワイヤループが形成されるが、以下の説明では、1つの第1ボンド点と1つの第2ボンド点との接続について説明する。図1に示すように、キャピラリ14に挿通したワイヤ13の先端に図示しないトーチ等によってイニシャルボール22を形成した後、図1に示す矢印のように第1ボンド点11の中心線10に沿ってキャピラリ14を降下させる。そして、キャピラリ14の先端のフェイス部16とインナチャンファ部15によってイニシャルボール22を第1ボンド点11に押し付けて接合させて、第1ボンド点11の上に圧着ボール12を形成する。圧着ボール12はキャピラリ14の押し付けによって第1ボンド点11に圧着されている(第1ボンディング工程)。
【0024】
図2及び図12に示すように、キャピラリ14を高さH1だけ中心線10に沿って垂直に上昇させて第1回目の連続動作を開始する。キャピラリ14が上昇し終わると、キャピラリ14の先端は圧着ボール12の上面から高さH1の点U1に位置している。
【0025】
図3及び図12に示すように、圧着ボール12の上面と中心線10との交点にある点C1を中心とし、図2に示した高さH1を半径r1とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ1だけ円弧状に移動させる。角度θ1は90度よりも小さく、例えば45度程度の角度である。キャピラリ14の第1回目の円弧移動が終了すると、キャピラリ14の先端は、点U1よりも第2ボンド点19側で、点U1と点C1との間の高さにある点C2に位置している。つまり、キャピラリ14は円弧移動によって点U1と点C2との高さの差の分だけ点U1から降下し、点U1から第2ボンド点19の方向に移動している。点U1と点C2との高さの差は図2に示したキャピラリ14の上昇高さH1よりも小さいので、キャピラリ14の先端は、第1回目の円弧動作によってキャピラリ14の上昇量H1よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってネックワイヤ23を第2ボンド点19に向かって緩やかに曲げると共に、ネックワイヤ23を斜め下向きに押込んで水平方向へルーピングするための1つ目の癖をつける(ワイヤ押込み工程)。
【0026】
キャピラリ14が第1回目の円弧動作を行う際、図3Aに示すように、ネックワイヤ23はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に、キャピラリ14のフェイス部16によって下向きに押込まれる。この際、キャピラリ14は点C1を中心に円弧状に移動しているので、点C1とキャピラリ14の先端との間の距離はほとんど変化せず一定に保持される。このため、キャピラリ14を点U1から点C2に向かって斜め下向きに移動させる際に、キャピラリ14によってネックワイヤ23をその軸方向に引っ張ってしまうことが無くなり、図2に示すネックワイヤ23に引っ張り荷重が掛かることが抑制される。そして、ネックワイヤ23が引っ張り荷重によって細くなってしまい、ネックワイヤ23の強度が低下することを抑制することが出来る。
【0027】
また、ワイヤ13の先端にイニシャルボール22を形成する際にはワイヤ13の先端をトーチ等により放電して加熱するため、その熱によってワイヤ13が熱硬化する場合が多く、ネックワイヤ23にはこの熱硬化が残ることが多い。熱硬化する長さはワイヤ13の径やイニシャルボール22の径等によって異なることが多いが、圧着ボール12の上面から50から100μm程度のことが多い。第1回目の円弧動作によってキャピラリ14によってネックワイヤ23の押込みを行う際、ネックワイヤ23の熱硬化部分を押込むと、押込み深さが大きすぎるとネックワイヤ23の硬化部分に損傷が発生する場合があり、逆に押込み深さが小さすぎると、ネックワイヤ23を押込んでも、硬化部分が水平方向になじまず、上方向に向かって反発してしまい、ワイヤループ全体の高さを低く出来ないことがある。そこで、第1回目の連続動作の際のキャピラリ14の上昇高さH1をネックワイヤ23の熱硬化部分より少し上までとし、円弧動作の半径r1を大きくして、ネックワイヤ23を緩やかに曲げて損傷を抑制すると共に、キャピラリ14の第1回目の円弧動作によってネックワイヤ23の硬化部分の上の硬化していない部分が水平方向に向かって伸びるようにしてもよい。これによって、ネックワイヤ23の損傷を抑制すると共に、ワイヤループ全体の高さを低くすることができる。
【0028】
図2、図3に示した第1回目のキャピラリ14の上昇動作と円弧動作の連続動作が終了すると、図4、図5に示すように、第2回目の連続動作を開始する。図4に示すように、キャピラリ14の先端を第1回目のキャピラリ14の円弧動作が終了する点C2から略垂直に高さH2だけ上昇させる。キャピラリ14が上昇し終わると、キャピラリ14の軸方向中心の先端は点C2から高さH2の点U2に位置している。この際、キャピラリ14の上昇高さH2は第1回目のキャピラリ14の上昇高さH1よりも小さくしてもよい。
【0029】
図5及び図12に示すように、第1回目のキャピラリ14の円弧動作が終了する点C2を中心とし、図4に示した高さH2を半径r2とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ2だけ円弧状に移動させる。角度θ2は90度よりも小さく、例えば45度程度の角度である。また、角度θ2は角度θ1よりも小さい角度であってもよい。キャピラリ14の第2回目の円弧移動が終了すると、キャピラリ14の軸方向中心の先端は、点U2よりも第2ボンド点19側で、点U2と点C2との間の高さにある点C3に位置している。つまり、キャピラリ14は円弧移動によって点U2と点C3との高さの差の分だけ点U2から降下し、点U2から第2ボンド点19の方向に移動している。点U2と点C3との高さの差は図4に示したキャピラリ14の上昇高さH2よりも小さいので、キャピラリ14の先端は、円弧動作によってキャピラリ14の上昇量H2よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってワイヤ13を再び第2ボンド点19に向かって曲げると共に、ワイヤ13を下向きに押込んで水平方向へルーピングするための2つ目の癖をつける。キャピラリ14の上昇高さH2を第1回目のキャピラリ14の上昇高さH1よりも小さくした場合には、曲げ半径r2も小さくなり、ワイヤ13への押し付け力を大きくすることができる。第2回目の円弧動作では、ワイヤ13が硬化していない部分を第2ボンド点19に向かって曲げると共にワイヤ13を斜め下向きに押込むので、曲げ半径r2を小さくして押し付け力を大きくすることによってワイヤ13に水平方向に伸びる癖を効果的につけることが出来る(ワイヤ押込み工程)。
【0030】
キャピラリ14が第2回目の円弧動作を行う際、図5Aに示すように、ワイヤ13はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に下向きに押込まれる。第1回目の円弧動作と同様、キャピラリ14は点C2を中心に円弧状に移動しているので、点C2とキャピラリ14の軸方向の中心の先端と点C2との間の距離はほとんど変化せず一定に保持される。このため、キャピラリ14を点U2から点C3に向かって斜め下向きに移動させる際に、キャピラリ14によってワイヤ13をその軸方向に引っ張ってしまうことが無くなり、ワイヤ13が引っ張り荷重によって細くなり、その強度が低下することを抑制することができる。
【0031】
図4、図5に示した第2回目のキャピラリ14の上昇動作と円弧動作の連続動作が終了すると、図6、図7に示すように、第3回目の連続動作を開始する。図6に示すように、キャピラリ14の先端を第2回目のキャピラリ14の円弧動作が終了する点C3から略垂直に高さH3だけ上昇させる。キャピラリ14が上昇し終わると、キャピラリ14の軸方向中心の先端は点C3から高さH3の点U3に位置している。第3回目の連続動作は圧着ボール12から離れた位置で少しだけワイヤ13を斜め下向きに押込めばよいので、キャピラリ14の上昇高さH3は、ワイヤループ21の全体形状によって決まる長さであるが、第1回目のキャピラリ14の上昇高さH1、第2回目の上昇高さH2よりも大きくしてもよい。
【0032】
図7及び図12に示すように、第2回目のキャピラリ14の円弧動作が終了する点C3を中心とし、図6に示した高さH3を半径r3とする円弧に沿ってキャピラリ14を第2ボンド点19の方向に向かって角度θ3だけ円弧状に移動させる。角度θ3は90度よりも小さく、例えば45度程度の角度である。また、角度θ3は角度θ1、角度θ2よりも小さい角度であってもよい。キャピラリ14の第3回目の円弧移動が終了すると、キャピラリ14の軸方向中心の先端は、点U3よりも第2ボンド点19側で、点U3と点C3との間の高さにある点C4に位置している。キャピラリ14は円弧移動によって点U3と点C4との高さの差の分だけ点U3から降下し、点U3から第2ボンド点19の方向に移動している。点U3と点C4との高さの差は図6に示したキャピラリ14の上昇高さH3よりも小さいので、キャピラリ14の先端は、円弧動作によってキャピラリ14の上昇量H3よりも少ない量だけ降下すると共に第2ボンド点19の方向に向かって斜め下向きに移動することとなる。この動作によってワイヤ13を再び第2ボンド点19に向かって緩やかに曲げると共に、ワイヤ13を斜め下向きに押込んで水平方向へルーピングするための3つ目の癖をつける。この3つ目の癖は、1つ目、2つ目の癖よりも小さな癖でよい(ワイヤ押込み工程)。
【0033】
キャピラリ14が第3回目の円弧動作を行う際には第2回目の円弧動作と同様、ワイヤ13はキャピラリ14のインナチャンファ部15のテーパ部分によって横方向に移動させられると共に下向きに押込まれる。第1回目、第2回目の円弧動作と同様、キャピラリ14は点C3を中心に円弧状に移動しているので、キャピラリ14によってワイヤ13をその軸方向に引っ張ってしまうことが無くなり、ワイヤ13が引っ張り荷重によって細くなり、その強度が低下することを抑制することができる。
【0034】
以上、説明した第1回目の連続動作から第3回目の連続動作が終了すると、図8に示すように、キャピラリ14の先端を点C4の位置から略垂直に上昇させる。上昇が終了すると、キャピラリ14の先端の位置は点U4に上昇している。そして、図9に示すように、キャピラリ14の先端を点U4から第2ボンド点19に向かって移動させ、キャピラリ14のフェイス部16によってワイヤ13を第2ボンド点19に圧着させることにより接合する。そして、キャピラリ14と共にワイヤ13を引き上げることによって、第2ボンド点19でワイヤ13を切断し、第1ボンド点11と第2ボンド点19とを結ぶワイヤループ21を形成する(第2ボンディング工程)。複数の第1ボンド点11と第2ボンド点19との接続が全て終了し、各第1ボンド点11と第2ボンド点19との間のワイヤループ21が形成されると半導体装置の組みたてが終了する。
【0035】
図9に示すように、本実施形態のワイヤボンディング方法によって形成された半導体装置のワイヤループ21は、ネックワイヤ23の部分が圧着ボール12の上面から第2ボンド点19に向かって水平方向よりやや下向きまで曲がり、第1回目の連続動作によってつけた癖の位置P1からわずかに上に向かって伸びた後第2回目の連続動作によってつけた癖の位置P2までわずかに下向きに伸び、第2回目の連続動作によってつけた癖の位置P2からわずかに上に向かって伸びた後第3回目の連続動作によってつけた癖の位置P3までわずかに下向きに伸びて第2ボンド点19につながっている。このように、本実施形態のワイヤボンディング方法では、圧着ボール12に続くネックワイヤ23またはワイヤ13を第2ボンド点19に向かって曲げると共に、ワイヤを斜め下向きに押込んで、曲げの後のワイヤの跳ね上がりを押さえ、ワイヤループ21全体の高さを低くすることができる。また、先に述べたように、キャピラリ14を第2ボンド点19に向かって斜め下方向に移動させる際に、キャピラリ14を円弧移動させているので、ネックワイヤ23やワイヤ13を引っ張って細く変形させることを抑制できるので、半導体装置のワイヤループ21の強度の低下を抑制することができる。
【0036】
また、本実施形態では、連続動作は3回として説明したが、連続動作は複数回であれば、3回に限らず、2回でも4回以上であってもよい。
【0037】
図13を参照して連続動作が2回の場合の実施形態について説明する。図1から図9、図12を参照して説明した実施形態と同様の部分には同様の符号を付して説明は省略する。図13に示すように、本実施形態では、先に説明した実施形態と同様に第1ボンド点11に圧着ボール12を形成した後、キャピラリ14の先端を点C1から点U1、点C2、点U2、点C3、と移動させた後、点C3から点U3´に向けてキャピラリ14を第2ボンド点19に向かって斜め上方に移動させた後、点U3´から点U4に向かってキャピラリ14を略垂直に上昇させ、第2ボンド点19に向かってルーピングし、第2ボンド点19にボンディングを行う。
【0038】
本実施形態では、連続動作を2回とし、2回目の連続動作の終了後キャピラリ14を斜め上方に移動させている。先に説明した実施形態では連続動作を3回行ってワイヤ13を3回押し付けているが、本実施形態のように、2回目の連続動作の後キャピラリ14を斜め上方に移動させ、その後、略垂直に上昇させることでもある程度ワイヤ13に3つ目の癖をつけることができるため、半導体装置のワイヤループ21の長さによっては同様の形状のループを形成することが出来るためである。また、半導体装置のワイヤループ21の全体長さが短い場合などは、本実施形態のようにキャピラリ14を斜め上方に移動させず、2回目の連続動作の後すぐに略垂直に上昇させた後、第2ボンド点19に向かってルーピングするようにしてもよい。
【0039】
図10、図11、図14を参照して他の実施形態について説明する。先に説明した実施形態と同様の部分については、同様の符号を付して説明は省略する。図10、図14に示すように、本実施形態のワイヤボンディング方法は、先に説明した実施形態と同様に、第1回から第3回の連続動作を行った後、図10及び図14に示すように、キャピラリ14の先端を略垂直に点U´4まで上昇させた後、第1ボンド点11の中心線10よりも第2ボンド点19と反対側の点U5までキャピラリ14をリバース動作させる(キンク形成工程)。そして、再びキャピラリ14の先端を点U6まで上昇させる。そして、その後キャピラリ14を第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するものである。
【0040】
本実施形態は先に説明した実施形態と同様、半導体装置のワイヤループ21の強度の低下を抑制すると同時に半導体装置のワイヤループ全体の高さを低くすることが出来ると共に、リバース動作によってワイヤ13にキンクKをつけることができる。このキンクKはワイヤ13を第2ボンド点19にボンディングしてワイヤループ21を形成した際、図11に示すように、位置P3から略水平に伸びるワイヤ13を第2ボンド点19に向かって斜め下向きに屈曲させる屈曲部24を形成する。この屈曲部24は、ワイヤループ21の形状を台形状にして、第1ボンド点11と第2ボンド点19との間に段差がある場合、ワイヤループ21が段差に接触して短絡を起こさないようにすると共に、ワイヤループ21の変形に対する強度を大きくすることが出来るため、例えば、樹脂注入の際のワイヤループ21の変形、切断或いはワイヤボンディングの際の冷却空気によるワイヤループ21の変形、ショートなどを抑制することが出来、ボンディング品質を向上させることができる。本実施形態では、1つのキンクKを形成することとして説明したが、上昇、リバース動作を複数回行って、キンクKを複数設け、ワイヤループ21に複数の屈曲部24を形成するようにしてもよい。
【0041】
図15、図16を参照して他の実施形態について説明する。本実施形態は先に説明した実施形態よりも長いワイヤループ21を形成するものである。先に説明した実施形態と同様の部分については、同様の符号を付して説明は省略する。図15に示すように、本実施形態のワイヤボンディング方法は、先に説明した実施形態と同様に、第1回から第3回の連続動作を行った後、更に第4回目の連続動作を行い、キャピラリ14の先端をC4から点U4に上昇させ、点U4から点C5まで角度θ4だけ円弧状に移動させ、ワイヤ13を4回押し付けてから、図15に示すように、キャピラリ14の先端を略垂直に点U5まで上昇させた後、第1ボンド点11の中心線10よりも第2ボンド点19と反対側の点U6までキャピラリ14をリバース動作させる(キンク形成工程)。そして、再びキャピラリ14の先端をボンディングの中心軸10の上に位置している点U7まで斜め上方に第2ボンド点19に向かって移動させた後、キャピラリ14を点U7から第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するものである。
【0042】
図15に示した実施形態では、キャピラリ14の先端を点U6から斜め上方に点U7に移動させた後、点U7から第2ボンド点19に向かって移動させることとして説明したが、図15の点線に出示すように、キャピラリ14の先端を点U6から点U6´まで略垂直に上昇させ、その後キャピラリ14を第2ボンド点19に向かって移動させてワイヤ13を第2ボンド点19に圧着させることによって接合するようにしてもよい。
【0043】
図16に示すように、本実施形態によって形成した半導体装置のワイヤループ21は、先の実施形態と同様に位置P1から位置P3の3つの位置の癖と、屈曲部24が形成されている他、P3と第2ボンド点19との間の位置P4に第4回目の連続動作によってつけた癖がついている。図16に示すように、ワイヤループ21の長さが長い場合には、位置P3に3つ目の癖をつけてもワイヤの上方への跳ね上がりによりワイヤループ21の全体高さを低くできない場合があるが、跳ね上がりによりループ高さが高くなると想定される位置P4に4つ目の癖をつけることで位置P3につけた3つ目の癖の第2ボンド点19側にあるワイヤが上方に跳ね上がることを抑制できるので、ワイヤループ21の長さが長い場合でもワイヤループ21の全体高さを均一に低くすることができる。
【0044】
図17を参照しながら本発明の他の実施形態について説明する。先に図1から図9、図12を参照して説明した実施形態では、キャピラリ14を第2ボンド点19に向かって斜め下向きに移動させる際にキャピラリ14の先端を円弧状に移動させることとして説明したが、キャピラリ14の上昇高さH1〜H3があまり大きくない場合、或いは円弧移動の際の回転角度θ1からθ3があまり大きくない場合には、キャピラリ14の先端を円弧動作させずに、図17に示すように、点U1から点C2まで直線動作させることとしてもよい。キャピラリ14の上昇高さH1〜H3が小さく円弧移動の際の回転角度θ1からθ3が小さい場合には、斜め移動に際の点C1とキャピラリ14の先端との距離の差が小さく、キャピラリ14によってネックワイヤ23或いはワイヤ13に掛かる軸方向の力が大きくならず、その変形による強度の低下も小さいためである。本実施形態は先に説明した実施形態のようにキャピラリ14の先端を円弧状に移動させなくともよいことからボンディング装置の制御を簡便にすることができる。
【0045】
また、図18に示すように、点U1から点C2までキャピラリ14の先端を移動させる場合に、キャピラリ14の上昇高さH1と同様の半径r1の円弧31の弦を結んだ近似折線32に沿ってキャピラリ14の先端を移動させてもよい。この際キャピラリ14の先端は、点U1から点Q1、点C2と順次直線的に移動していく。本実施形態も先に説明した実施形態同様、ボンディング装置を簡便にすることが出来る。
【図面の簡単な説明】
【0046】
【図1】本発明の実施形態におけるワイヤボンディング方法の第1ボンディング工程を示す説明図である。
【図2】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第1回目の連続動作を示す説明図である。
【図3】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第1回目の連続動作を示す説明図である。
【図3A】図3に示す動作中のキャピラリとワイヤと示す拡大図である。
【図4】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第2回目の連続動作を示す説明図である。
【図5】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第2回目の連続動作を示す説明図である。
【図5A】図5に示す動作中のキャピラリとワイヤと示す拡大図である。
【図6】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第3回目の連続動作を示す説明図である。
【図7】本発明の実施形態におけるワイヤボンディング方法の押込み工程の第3回目の連続動作を示す説明図である。
【図8】本発明の実施形態におけるワイヤボンディング方法の第2ボンディング工程を示す説明図である。
【図9】本発明の実施形態におけるワイヤボンディング方法の第2ボンディング工程と本発明の実施形態のワイヤループを示す説明図である。
【図10】本発明の他の実施形態におけるワイヤボンディング方法のキンク作成工程を示す説明図である。
【図11】本発明の他の実施形態におけるワイヤボンディング方法の第2ボンディング工程と本発明の他の実施形態のワイヤループを示す説明図である。
【図12】本発明の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図13】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図14】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図15】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図16】本発明の他の実施形態におけるワイヤボンディング方法で形成したワイヤループの形状を示す説明図である。
【図17】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【図18】本発明の他の実施形態におけるワイヤボンディング方法のキャピラリ先端の移動を示す説明図である。
【符号の説明】
【0047】
10 中心線、11 第1ボンド点、12 圧着ボール、13 ワイヤ、14 キャピラリ、15 インナチャンファ部、16 フェイス部、19 第2ボンド点、21 ワイヤループ、22 イニシャルボール、23 ネックワイヤ、24 屈曲部、31 円弧、32 近似折線。
【特許請求の範囲】
【請求項1】
第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤボンディング方法であって、
ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、
第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、
ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、
を含むことを特徴とするワイヤボンディング方法。
【請求項2】
請求項1に記載のワイヤボンディング方法であって、
連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいことを特徴とするワイヤボンディング方法。
【請求項3】
請求項2に記載のワイヤボンディング方法であって、
連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、
を特徴とするワイヤボンディング方法。
【請求項4】
請求項3に記載のワイヤボンディング方法であって、
連続動作のキャピラリの円弧状移動は、前回連続動作のキャピラリの円弧状移動の終了点を中心とする円弧動作であること、
を特徴とするワイヤボンディング方法。
【請求項5】
請求項4に記載のワイヤボンディング方法であって、
連続動作の第1回目のキャピラリの円弧状移動の際の移動角度は、第2回目のキャピラリの円弧状移動の際の移動角度よりも大きいことを特徴とするワイヤボンディング方法。
【請求項6】
請求項2に記載のワイヤボンディング方法であって、
上昇円弧状動作の円弧状の移動は、円弧を複数の直線で近似した近似折線に沿ってキャピラリが移動すること、
を特徴とするワイヤボンディング方法。
【請求項7】
請求項2に記載のワイヤボンディング方法であって、
連続動作の第3回目以降のキャピラリの上昇量は、第1回目及び第2回目のキャピラリの上昇量よりも大きいことを特徴とするワイヤボンディング方法。
【請求項8】
請求項2から7のいずれか1項に記載のワイヤボンディング方法であって、
ワイヤ押し込み工程と第2ボンディング工程との間に、キャピラリを上昇させ、続いてキャピラリを第2ボンド点と反対方向に移動させるリバース動作を少なくとも1回行い、ワイヤにキンクを形成するキンク形成工程を含むこと、
を特徴とするワイヤボンディング方法。
【請求項9】
第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤループ形状を有する半導体装置であって、
ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、
第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、
ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、
により形成するワイヤループ形状を有することを特徴とする半導体装置。
【請求項10】
請求項9に記載の半導体装置であって、
連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいことを特徴とする半導体装置。
【請求項11】
請求項10に記載の半導体装置であって、
連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、
を特徴とする半導体装置。
【請求項1】
第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤボンディング方法であって、
ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、
第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、
ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、
を含むことを特徴とするワイヤボンディング方法。
【請求項2】
請求項1に記載のワイヤボンディング方法であって、
連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいことを特徴とするワイヤボンディング方法。
【請求項3】
請求項2に記載のワイヤボンディング方法であって、
連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、
を特徴とするワイヤボンディング方法。
【請求項4】
請求項3に記載のワイヤボンディング方法であって、
連続動作のキャピラリの円弧状移動は、前回連続動作のキャピラリの円弧状移動の終了点を中心とする円弧動作であること、
を特徴とするワイヤボンディング方法。
【請求項5】
請求項4に記載のワイヤボンディング方法であって、
連続動作の第1回目のキャピラリの円弧状移動の際の移動角度は、第2回目のキャピラリの円弧状移動の際の移動角度よりも大きいことを特徴とするワイヤボンディング方法。
【請求項6】
請求項2に記載のワイヤボンディング方法であって、
上昇円弧状動作の円弧状の移動は、円弧を複数の直線で近似した近似折線に沿ってキャピラリが移動すること、
を特徴とするワイヤボンディング方法。
【請求項7】
請求項2に記載のワイヤボンディング方法であって、
連続動作の第3回目以降のキャピラリの上昇量は、第1回目及び第2回目のキャピラリの上昇量よりも大きいことを特徴とするワイヤボンディング方法。
【請求項8】
請求項2から7のいずれか1項に記載のワイヤボンディング方法であって、
ワイヤ押し込み工程と第2ボンディング工程との間に、キャピラリを上昇させ、続いてキャピラリを第2ボンド点と反対方向に移動させるリバース動作を少なくとも1回行い、ワイヤにキンクを形成するキンク形成工程を含むこと、
を特徴とするワイヤボンディング方法。
【請求項9】
第1ボンド点と第2ボンド点との間をワイヤで接続するワイヤループ形状を有する半導体装置であって、
ワイヤの先端に形成したイニシャルボールをキャピラリによって第1ボンド点に接合させて圧着ボールを形成する第1ボンディング工程と、
第1ボンディング工程の後、キャピラリを略垂直に上昇させてからキャピラリを第2ボンド点の方向に向かって斜め下方にキャピラリの上昇量よりも少ない量だけ下降させるという連続動作を複数回繰り返して行い、複数の位置でワイヤを斜め下方に向かって押し込むワイヤ押込み工程と、
ワイヤ押し込み工程の後、キャピラリを上昇させ、続いてキャピラリを第2ボンド点の方向に移動させてワイヤを第2ボンド点に圧着させることにより接合する第2ボンディング工程と、
により形成するワイヤループ形状を有することを特徴とする半導体装置。
【請求項10】
請求項9に記載の半導体装置であって、
連続動作の第1回目のキャピラリの上昇量は、第2回目のキャピラリの上昇量よりも大きいことを特徴とする半導体装置。
【請求項11】
請求項10に記載の半導体装置であって、
連続動作は、第1ボンディング工程の後、キャピラリを略垂直に上昇させ、続いてキャピラリの上昇量を半径としてキャピラリを第2ボンド点の方向に向かって円弧状に移動させる上昇円弧状動作であること、
を特徴とする半導体装置。
【図1】


【図2】
【図3】
【図3A】
【図4】
【図5】
【図5A】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図3A】
【図4】
【図5】
【図5A】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−103157(P2010−103157A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−270913(P2008−270913)
【出願日】平成20年10月21日(2008.10.21)
【特許番号】特許第4361593号(P4361593)
【特許公報発行日】平成21年11月11日(2009.11.11)
【出願人】(000146722)株式会社新川 (128)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月21日(2008.10.21)
【特許番号】特許第4361593号(P4361593)
【特許公報発行日】平成21年11月11日(2009.11.11)
【出願人】(000146722)株式会社新川 (128)
【Fターム(参考)】
[ Back to top ]