
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。

【発明の詳細な説明】
【技術分野】
【0001】
ワイヤレス信号を使用した位置の判断方法および装置に関する。
【背景技術】
【0002】
セルラー通信デバイスまたは他のワイヤレス通信デバイスなど、移動局の正確な位置情報を取得することが、通信産業において普及しつつある。Global Positioning System(GPS)は、ワイヤレス移動局位置判断を行う手法を提供する。GPSユーザは、地球の周りの軌道にある衛星ビークル(SV)から獲得された情報を通して、3次元位置、速度および時刻を含む正確なナビゲーション情報を 導出することができる。SVから受信された信号は一般にかなり弱い。したがって、受信機の位置を判断するために、受信機は、これらの弱い信号を受信し、それらによって表される情報を解釈するために十分に高感度である必要がある。
【0003】
現在のGPS受信機の1つの制限は、それらの動作が、複数の衛星が障害なしにはっきり見え、そのような信号を受信するために良好な品質のアンテナが適切に配置されている状況に限定されることである。したがって、それらは、生い茂った葉または建築物障害物(たとえば、ビルの谷間)などの障害物状態があるエリアおよび屋内では、通常、使用不可能である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS測位における制限を補償するための1つの方法は、デッドレコニングの使用である。デッドレコニングは、前に決定された位置と、たとえば、モーションセンサまたは他のセンサによって測定された、前に決定された位置から移動した方向および距離とに基づいて現在の位置を推定するために使用される。しかしながら、デッドレコニング測定にはドリフトエラーという欠点があり得る。たとえば、加速度計におけるドリフトは、測定された移動距離に影響を及ぼし得る。エスカレータの水平移動など、さらなる環境要因が距離測定に影響を及ぼし得る。さらに、地磁界障害(異常)が磁気測定に影響を及ぼし、進行方向の誤差を生じ得る。したがって、デッドレコニングの使用により、位置判断は経時的にますます不正確になる。したがって、移動局の位置判断の改善が望まれる。
【課題を解決するための手段】
【0005】
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、受信信号強度および/または往復時間など、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、ワイヤレス信号のうちの1つまたは複数のパラメータを測定し、それをデータベースと比較して、ワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング推定値は、移動局の推定位置を改善するために、それぞれの信頼性レベルを使用してワイヤレス信号に基づく位置推定値と融合され得る。
【0006】
ワイヤレス信号ロケーションデータベースは、移動局の位置の判断を支援するために使用される。ワイヤレス信号ロケーションデータベースは、移動局内で、または移動局によってアクセスされるオンラインサーバにおいて生成され得る。データベースは、ワイヤレス信号の測定されたパラメータと測定ロケーションの推定位置とを受信することによって生成される。ワイヤレス信号アクセスポイントと測定ロケーションとの間の距離は、たとえば、ワイヤレス信号の往復時間または経路損失に基づいて推定される。次いで、推定距離と測定ロケーションの推定位置とに基づいてワイヤレス信号アクセスポイントの位置が推定される。ワイヤレス信号アクセスポイントの推定位置および対応する信頼性レベルは、データベースに記憶される。ワイヤレス信号アクセスポイントの記憶された位置および対応する信頼性レベルは、アクセスポイントからのワイヤレス信号を使用して移動局の位置を推定するのを支援するために使用され得る。
【図面の簡単な説明】
【0007】
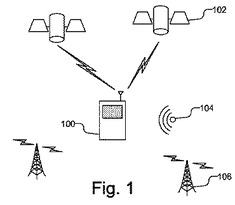
【図1】たとえば、ワイヤレス通信アクセスポイントまたはセルラータワーからのワイヤレス信号を使用して、それの位置を判断することが可能である移動局を示す図である。
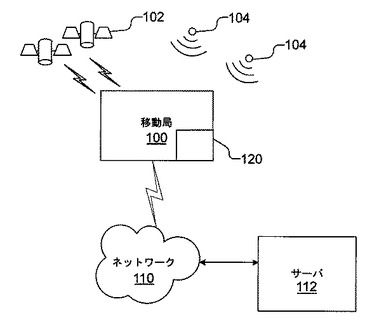
【図2】移動局がワイヤレス信号を使用してそれの位置を判断し得るシステムを示すブロック図である。
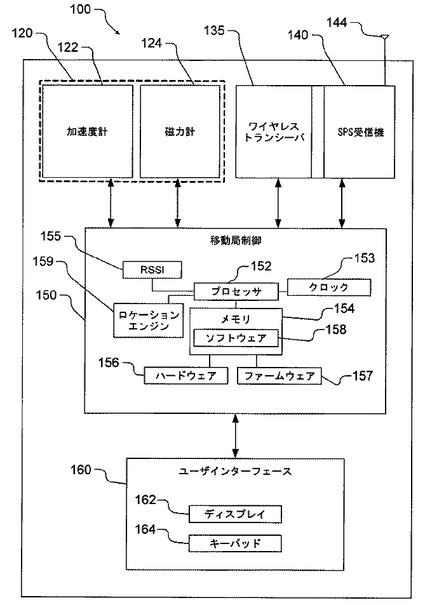
【図3】ワイヤレス信号を使用してそれの位置を判断することが可能な移動局のブロック図である。
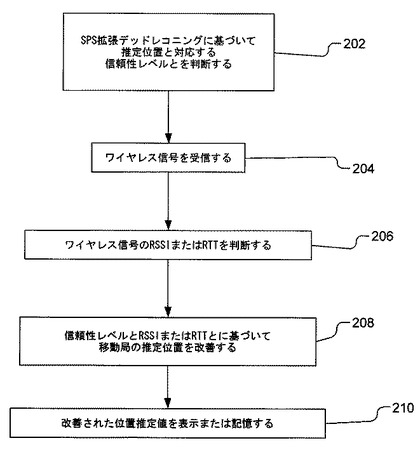
【図4】移動局のワイヤレス信号をデッドレコニングと組み合わせて使用して位置を判断する方法を示すフローチャートである。
【図5】2つのワイヤレスアクセスポイントをもつ建築物を示す図である。
【図6】移動局においてワイヤレス信号ロケーションデータベースを生成する方法を示すフローチャートである。
【図7】移動局によって受信されたワイヤレス信号のパラメータに基づいて位置情報を生成し、移動局に与え得るサーバのブロック図である。
【図8】移動局によって受信されたワイヤレス信号を使用して移動局位置判断を支援するためのサーバデータベースを確立するフローチャートである。
【発明を実施するための形態】
【0008】
図1に、たとえば、アクセスポイントと総称されることがある、ワイヤレス通信アクセスポイント104またはセルラータワー106からのワイヤレス信号を使用して、それの位置を判断することが可能である移動局100を示す。ワイヤレス信号を使用して判断された測位情報は、衛星ビークル102を使用した衛星測位システム(SPS)、ならびに磁力計および加速度計などの動きセンサによるデッドレコニングなど、他の測位機構とともに使用され得る。ワイヤレス信号を使用した位置判断は、移動局が建築物内にあるとき、あるいはSPSカバレージがほとんどまたはまったくない他の環境内にあるときなど、SPSシステムが利用不可能であるときに特に有用であり得る。ワイヤレス信号位置判断は、SPSカバレージが弱いかまたはないシナリオにおいてデッドレコニングエラーを低減するために使用され得、それによって、歩行者または他のタイプのナビゲーションおよびロケーションベースの広告などのアプリケーションの精度を上げる。
【0009】
本明細書で使用する移動局(MS)は、セルラーまたは他のワイヤレス通信デバイス、パーソナル通信システム(PCS)デバイス、パーソナルナビゲーションデバイス(PND)、個人情報マネージャ(PIM)、携帯情報端末(PDA)、ラップトップまたはワイヤレス通信および/またはナビゲーション測位信号などのナビゲーション信号を受信することが可能な他の適切なモバイルデバイスなどのデバイスを指す。また、「移動局」という用語は、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するかパーソナルナビゲーションデバイス(PND)で発生するかにかかわらず、短距離ワイヤレス、赤外線、ワイヤライン接続、または他の接続などによってPNDと通信するデバイスを含むものとする。また、「移動局」は、インターネット、WiFi、または他のネットワークなどを介するサーバとの通信が可能であり、衛星信号受信、支援データ受信、および/または位置に関係する処理がデバイスにおいて行われるか、サーバにおいて行われるか、ネットワークに関連する別のデバイスにおいて行われるかにかかわらず、ワイヤレス通信デバイス、コンピュータ、ラップトップなどを含むすべてのデバイスを含むものとする。上記の任意の動作可能な組合せも「移動局」と見なされる。
【0010】
衛星測位システム(SPS)は、一般に、送信機から受信した信号に少なくとも部分的に基づいて地球上または地球上空のエンティティのロケーションをそれらのエンティティが判断できるように配置された送信機のシステムを含む。そのような送信機は、一般に、設定された数のチップの反復する擬似雑音(PN)コードでマークされた信号を送信し、地上ベースの制御局、ユーザ機器、および/または宇宙ビークル上に配置され得る。特定の例では、そのような送信機は、図1に示す地球周回軌道衛星ビークル(SV)102上に配置され得る。たとえば、Global Positioning System(GPS)、Galileo、GlonassまたはCompassなどのGlobal Navigation Satellite System(GNSS)のコンスタレーション中のSVは、(たとえば、GPSの場合のように各衛星について異なるPNコードを使用して、またはGlonassの場合のように異なる周波数上の同じコードを使用して)コンスタレーション中の他のSVによって送信されたPNコードとは区別可能なPNコードでマークされた信号を送信し得る。
【0011】
いくつかの態様によれば、本明細書で提示した技法は、SPSについての全地球システム(たとえば、GNSS)に限定されない。たとえば、本明細書に記載する技法は、日本のQuasi-Zenith Satellite System(QZSS)、インドのIndian Regional Navigational Satellite System(IRNSS)、中国のBeidouなどの様々な地域システム、および/または1つまたは複数の全地球および/または地域ナビゲーション衛星システムに関連付けられ得るか、または場合によってはそれらのシステムとともに使用することが可能な、様々なオーグメンテーションシステム(たとえば、Satellite Based Augmentation System(SBAS))に適用され得るか、または場合によってはこれらのシステムとともに使用することが可能である。限定ではなく例として、SBASは、たとえば、Wide Area Augmentation System (WAAS)、European Geostationary Navigation Overlay Service (EGNOS)、Multi-functional Satellite Augmentation System (MSAS)、GPS Aided Geo Augmented NavigationまたはGPSおよびGeo Augmented Navigationシステム(GAGAN)など、完全性情報、差分補正などを行うオーグメンテーションシステムを含み得る。したがって、本明細書で使用するSPSは、1つまたは複数のグローバルおよび/または領域ナビゲーション衛星システム、ならびに/あるいは1つまたは複数のグローバルおよび/または領域オーグメンテーションシステムの任意の組合せを含み得、SPS信号は、SPS信号、SPS様の信号、および/またはそのような1つまたは複数のSPSに関連する他の信号を含み得る。
【0012】
本明細書で説明する位置判断技法は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、セルラータワー106を含む様々なワイヤレス通信ネットワークに関連して、ワイヤレス通信アクセスポイント104から実装され得るので、移動局100は、位置判断のためのSPSとの使用に限定されない。さらに、移動局100は、衛星画像などのデータを取得するために、様々なワイヤレス通信ネットワークを使用して、セルラータワー106を介してワイヤレス通信アクセスポイント104から、または所望される場合、衛星ビークル102を使用して、オンラインサーバにアクセスし得る。「ネットワーク」および「システム」という用語は、しばしば互換的に使用される。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、シングルキャリア周波数分割多元接続(SC-FDMA)ネットワーク、Long Term Evolution(LTE)などであり得る。CDMAネットワークは、cdma2000、広帯域CDMA(W-CDMA)などの1つまたは複数の無線アクセス技術(RAT)を実装し得る。cdma2000は、IS-95標準、IS-2000標準、およびIS-856標準を含む。TDMAネットワークは、Global System for Mobile Communications(GSM(登録商標))、Digital Advanced Mobile Phone System(D-AMPS)、または何らかの他のRATを実装し得る。GSM(登録商標)およびW-CDMAは、「3rd Generation Partnership Project」(3GPP)という名称の組織からの文書に記載されている。Cdma2000は、「3rd Generation Partnership Project 2」(3GPP2)という名称の組織からの文書に記載されている。3GPPおよび3GPP2の文書は公的に入手可能である。WLANは、IEEE802.11xネットワークであり得、WPANは、Bluetooth(登録商標)ネットワーク、IEEE802.15xネットワーク、または他の何らかのタイプのネットワークであり得る。本技法はまた、WWAN、WLAN、および/またはWPANの任意の組合せに関して実装され得る。
【0013】
図2は、移動局100がワイヤレス信号を使用してそれの位置を判断し得るシステムを示すブロック図である。図示のように、移動局100は、衛星ビークル102を含むSPSシステムを使用してそれの位置を判断することが可能である。さらに、移動局100は、SPSシステムが利用不可能であるとき、磁力計および加速度計などの動きセンサ120と前の絶対位置推定値とを使用してそれの位置を判断することが可能である。移動局100は、ワイヤレスアクセスポイント104から(または図1に示すセルラータワー106から)ワイヤレス信号を受信し、それらの信号を使用して位置判断を支援する。例として、使用され得るワイヤレス信号は、WLAN、UMTS、GSM(登録商標)、Bluetooth(登録商標)またはこれらの組合せを含む。移動局100は、ワイヤレス信号のための信号の強度または往復時間を測定し、それらの値をワイヤレスフィンガープリントのデータベースと比較して移動局100のワイヤレス信号に基づく位置推定値を判断する。例として、ワイヤレスロケーション、たとえば、ワイヤレス信号フィンガープリントまたはワイヤレスアクセスポイント位置のデータベースは、移動局100のメモリにおいて生成され、記憶され得る。代わりに、移動局は、ネットワーク110を通して、たとえば、ワイヤレスアクセスポイント104またはセルラータワー106を介して、ワイヤレスロケーションデータベースをもつサーバ112にアクセスし、問い合わせ得る。
【0014】
図3は移動局100のブロック図である。図3に示すように、移動局100は、加速度計122および磁力計124を含み得る動きセンサ120を含み得る。動きセンサ120は、所望される場合、ジャイロスコープ、圧力センサ、またはカメラなど、追加または代替デバイスを含み得る。車両、自転車または車椅子ナビゲーションの場合、追加のタイプのセンサは車両走行距離計またはホイールチックセンサであり得る。磁力計124、ならびにジャイロスコープ、圧力センサ、またはカメラなどのセンサは、たとえば、方向、距離または高度の変化に関して動きの判断を支援し得るので、本明細書では動きセンサ120と見なされる。移動局100は、衛星測位システム(SPS)衛星102(図1)からアンテナ144を介して信号を受信するSPS受信機140を含む。移動局100はまた、たとえば、ワイヤレスアクセスポイント104との間でアンテナ144を介して通信を送信および受信することが可能である、ワイヤレスネットワーク無線受信機/送信機であり得る、ワイヤレストランシーバ135を含む。移動局100はまた、セルラータワー106との間で通信を送信および受信することが可能である、ワイヤレストランシーバ135とは別個またはそれの一部であるセルラーモデムを含み得る。
【0015】
動きセンサ120中の加速度計122および磁力計124、SPS受信機140、ならびにワイヤレストランシーバ135は、移動局制御150に接続され、それと通信する。移動局制御150は、動きセンサ120、SPS受信機140、およびワイヤレストランシーバ135からのデータを受け付けて処理し、デバイスの動作を制御する。移動局制御150は、プロセッサ152および関連メモリ154と、クロック153と、ハードウェア156と、ソフトウェア158と、ファームウェア157とによって与えられ得る。移動局150は、プロセッサ152とは別個またはそれの一部であり得る受信信号強度インジケータシステム(RSSI)155をさらに含む。RSSIシステム155は、ワイヤレストランシーバ135によって受信された無線信号の信号強度を判断し、測定された信号強度をプロセッサ152に与える。さらに、プロセッサ152は、アクセスポイントへの信号を生成し、ワイヤレス信号の往復時間を判断するために応答を受信する時間を監視するようにワイヤレス受信機135を制御し得る。
【0016】
移動局150は、明快のためにプロセッサ152とは別個に示されているが、プロセッサ152内にもあり得るロケーションエンジン159をさらに含む。ロケーションエンジン159は、移動局100の位置を判断するために、SPSデータ、デッドレコニングデータ、およびワイヤレス信号データを含む測位データと、ワイヤレスロケーションデータベースとを処理する。ワイヤレスロケーションデータベースは、メモリ154に、または代替的に、ワイヤレストランシーバ135を介してアクセスされるサーバデータベースに記憶され得る。さらに、いくつかの実施形態では、ロケーションエンジンは、ワイヤレストランシーバ135を介してアクセスされ、問い合わせられる、ネットワーク110中のサーバ、たとえば、図2中のサーバ112上にも配置され得る。
【0017】
本明細書で使用するプロセッサ152は、1つまたは複数のマイクロプロセッサ、組込みプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)などを含むことができるが、必ずしも含む必要はないことを理解されよう。プロセッサという用語は、特定のハードウェアではなく、システムによって実装される機能を表すものとする。さらに、本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、または移動局に関連する他のメモリを含むいずれかのタイプのコンピュータ記憶媒体を指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0018】
移動局100はまた、移動局制御150と通信しているユーザインターフェース160を含み、たとえば、移動局制御150は、データを受け付け、ユーザインターフェース160を制御する。ユーザインターフェース160は、カメラ130によって生成されたイメージならびに制御メニューと位置情報とを表示するディスプレイ162を含み得る。ユーザインターフェース160は、ユーザが移動局100に情報を入力することができるキーパッド164または他の入力デバイスをさらに含む。一実施形態では、キーパッド164は、タッチスクリーンディスプレイなどのディスプレイ162に組み込まれ得る。ユーザインターフェース160はまた、たとえば、移動局100がセルラー電話であるとき、たとえば、マイクロフォンとスピーカーとを含み得る。
【0019】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア156、ファームウェア157、ソフトウェア158、またはそれらの任意の組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0020】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいずれの機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ154に記憶され、プロセッサ152によって実行され得る。メモリは、プロセッサユニットの内部および/またはプロセッサユニットの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0021】
ファームウェアおよび/またはソフトウェアで実装する場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。例としては、データ構造で符号化されたコンピュータ可読媒体、およびコンピュータプログラムで符号化されたコンピュータ可読媒体がある。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フレキシブルディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0022】
コンピュータ可読媒体上での記憶に加えて、命令および/またはデータは、通信装置中に含まれる伝送媒体上の信号として与えられ得る。たとえば、通信装置は、命令とデータとを示す信号を有するトランシーバを含み得る。命令およびデータは、1つまたは複数のプロセッサに特許請求の範囲で概説する機能を実装させるように構成される。すなわち、通信装置は、開示した機能を実行するための情報を示す信号をもつ伝送媒体を含む。初めに、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第1の部分を含み得、次に、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第2の部分を含み得る。
【0023】
図4は、ワイヤレス信号をデッドレコニングと組み合わせて使用して移動局の位置を判断する方法を示すフローチャートである。図4に示すように、移動局の推定位置を、対応する信頼性レベルとともに判断する(202)。推定位置は、たとえば、SPS拡張デッドレコニングを使用して判断され得る。たとえば、移動局の位置がSPSシステムを使用して判断され得、たとえば、SPSシステムからのデータがSPS受信機140(図3)によって受信され、そこからプロセッサ152またはロケーションエンジン159が位置を計算する。移動局の改善された位置推定値は、前のおよび現在のSPSベース位置フィックスを収集し、動きセンサ(120)によって受信されたデータによるデッドレコニングに基づいて、これらの絶対位置推定値を相対位置推定値と組み合わせることによって取得され得る。所望される場合、たとえば、SPSカバレージが弱いかまたはない場合、位置推定値は、セルラータワー106を含む他の様々なワイヤレス通信ネットワークから、およびワイヤレス通信アクセスポイント104からのデータを、動きセンサ(120)によって受信されたデータによるデッドレコニングに基づく相対位置推定値と組み合わせて使用することを含む他の技法およびデバイスを使用して向上され得る。
【0024】
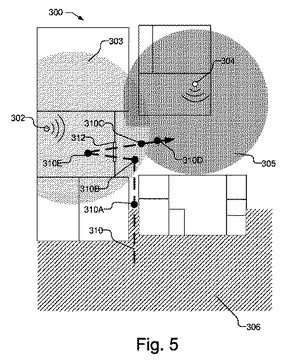
説明のために、図5に、それぞれワイヤレス信号303および305をもつ2つのワイヤレスアクセスポイント302および304をもつ建築物300を示す。建築物300は、モール中の店舗など、いくつかの部屋を含み得る。建築物300の外部で、SPSシステムのカバレージエリア306はハッチングで示され、これは建築物中に小さい距離延びている。移動局が建築物中を移動する経路310が点線で示されている。移動局が建築物の外部にある間、移動局は十分なSPSシステムカバレージを有し、したがって正確な位置フィックスを取得する。移動局が建築物に入ると(位置310A)、移動局の位置は、漸進的により不正確になるSPS位置推定値と組み合わされたデッドレコニングに基づいて推定される。デッドレコニングからの推定位置は、図3に示す移動局100中の加速度計122および磁力計124などの動きセンサ120を使用して生成され得る。動きセンサ120からの位置データは、プロセッサ152またはロケーションエンジン159に与えられる。したがって、推定位置は、最新の既知の正確な位置と動きセンサ120からの累積位置データとに基づいて生成される。ただし、デッドレコニング位置推定値は、通常、たとえば、100mに関して1m〜5mドリフトする。さらに、磁力計に影響を及ぼす磁気障害がある場合、または水平エスカレータが使用された場合、デッドレコニング位置推定値のドリフトはより一層重大であり得る。
【0025】
デッドレコニング位置推定値のドリフトを補正するために、移動局によって受信されたワイヤレス信号が、位置判断を支援するために使用される。たとえば、図5を参照すると、移動局は、位置310Bにおいてアクセスポイント302からワイヤレス信号303を受信し、位置310Dにおいてアクセスポイント304からワイヤレス信号305を受信する。位置310Cにおいて、移動局はワイヤレス信号303および305を両方とも受信することができる。ワイヤレス信号303および305の測定されたパラメータは、移動局の位置を推定するのを支援するために使用され得る。
【0026】
図4を参照すると、たとえば、ワイヤレストランシーバ135によって、ワイヤレス信号を受信すると(204)、ワイヤレスフィンガープリントと呼ばれることがあるワイヤレス信号のパラメータを測定する。たとえば、ワイヤレス信号の信号強度を、たとえば、(RSSI)155によって判断する(206)。代替または追加として、ワイヤレス信号の往復時間を判断する(208)。例として、プロセッサ152は、復帰信号で応答するローカルアクセスポイントへのワイヤレス信号を生成するようにワイヤレストランシーバを制御し得る。プロセッサ152は、ワイヤレス信号の往復時間(RTT)を判断するためにクロック153を使用する。たとえば、3つ以上のアクセスポイントのRSSIおよび/またはRTTが測定され得る。ワイヤレス信号の測定されたパラメータ、たとえば、RSSIまたはRTTを使用して、移動局の位置推定値を改善し(208)、改善された位置推定値を、たとえば、ディスプレイ162上に表示するか、またはアプリケーションによって使用されるためにメモリ154に記憶する(210)。たとえば、位置推定値は、SPS拡張デッドレコニング位置推定値とワイヤレスフィンガープリントに関連する位置推定値とを、それぞれの位置推定値に関連する信頼性レベルを考慮に入れて融合させることによって改善され得る。
【0027】
測定されたパラメータ、たとえば、ワイヤレス信号のRSSIまたはRTTを使用して位置推定値を改善するために(208)、測定されたパラメータは、移動局100に記憶され得るか、または代替的に外部データベースに記憶され得るワイヤレス信号フィンガープリントと比較される。ワイヤレス信号フィンガープリントは、すべての受信されたアクセスポイントからのRSSIおよび/または往復時間測定値として定義される。ワイヤレス信号フィンガープリントは、位置に関してほぼ一意である。
【0028】
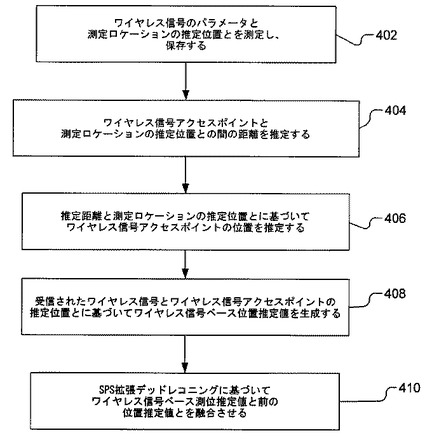
一実施形態では、ワイヤレス信号フィンガープリントは移動局100に記憶される。図6は、移動局を使用してワイヤレス信号ロケーションデータベースを生成する方法を示すフローチャートであり、ワイヤレス信号ロケーションは、ワイヤレスフィンガープリントまたはワイヤレスアクセスポイント位置であり得る。図示のように、複数の測定ロケーションについて、ワイヤレス信号のパラメータを測定し、たとえば、移動局100中のメモリ154(図3)に記憶する(402)。さらに、測定ロケーションの推定位置を判断し、記憶する(402)。たとえば、移動局がワイヤレスアクセスポイントのカバレージに、たとえば、図5中の位置310Bに移動すると、ワイヤレスアクセスポイント302によって生成されたワイヤレス信号303のRSSIおよび/またはRTTが測定され、移動局の位置推定値とともに記憶される。さらに、推定された位置の信頼性レベルが判断され、記憶され得る。測定ロケーションの位置推定値は、SPS拡張デッドレコニングまたはワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニングに基づいて判断され得る。位置推定値の信頼性は、最後のSPS位置フィックスからの距離または時間の関数であり得る。
【0029】
ワイヤレス信号アクセスポイントと測定ロケーションの推定位置との間の距離を推定する(404)。ワイヤレスアクセスポイントから測定ロケーションまでの距離の推定は、チャネルモデルを使用して判断され得、往復時間測定値および/または経路損失測定値に基づき得る。経路損失測定値に基づく推定距離は、ワイヤレスアクセスポイント送信電力の知識を仮定する。チャネルでは、マルチパスを考慮に入れるべきであり、さもなければ距離推定値が影響を受ける。受信機への間接的経路をとるか、またはどこかで反射されるワイヤレス信号は、往復時間推定値とRSSIとによって距離推定値が影響を及ぼされる。移動局がアクセスポイントに関して非見通し線位置から見通し線位置に移動すると、ワイヤレス信号に基づく距離推定値は、デッドレコニングによる位置の変化よりも大きく変化する。たとえば、図5では、移動局はガラスドア312を通して位置310Bから位置310Eに移動し得、RSSIが大きく増加することになり、位置が大きく変化したことを示す。しかしながら、デッドレコニング位置の変化は、位置の小さい変化のみを示す。距離推定値は、連続する位置推定値間の差であり、したがって、デッドレコニングは少量の時間の間は正確であり、すなわち、ドリフトはほとんどまたはまったく発生しないので、正確であると見なされる。したがって、測定された往復時間および経路損失の少なくとも1つの変化が、対応する測定ロケーションの推定位置の変化と比較され得、比較を使用して、アクセスポイント間の距離を推定するために使用されるチャネルモデルを変更する。たとえば、一実施形態では、遷移距離は、デッドレコニングに基づいて、およびワイヤレス信号に基づいて、たとえば、遷移が生成される間の距離推定値の差をワイヤレス信号に基づいてとることによって判断され得る。ワイヤレス信号に基づくアクセスポイントまでの推定距離は、デッドレコニング遷移距離よりも大きい距離推定値の差よって補正される。代替または追加として、デッドレコニング位置の変化との不整合によって判断された、マルチパスによって影響を及ぼされるワイヤレス信号ベース距離推定値に、より低い信頼性がアタッチされる。さらに、移動局の位置推定値が、より信頼できないデッドレコニングを介して取得された場合、距離推定値により低い信頼性がアタッチされ得る。
【0030】
次いで、いくつかの推定距離と測定ロケーションの推定位置とに基づいてワイヤレスアクセスポイントの位置を推定する(406)。測定ロケーションの推定位置の信頼性レベルならびに推定距離の信頼性レベルは、アクセスポイントロケーションの判断においても使用され得る。たとえば、あまり信頼できない推定位置または距離推定値が、コスト関数に対するそれらの影響を減衰させることによる最小化の過程で考慮に入れられ得る。さらに、ワイヤレス信号アクセスポイントの推定位置の信頼性レベルが判断され得る。判断されたアクセスポイントロケーションは、移動局が現在のロケーション、たとえば、建築物300にある間に使用するために、メモリ154中のデータベースに記憶され得る。判断されたアクセスポイントロケーションは、将来の使用のため、たとえば、移動局が建築物300に戻ったときのためにも記憶され得る。
【0031】
アクセスポイントロケーションのデータベースが生成されると、次いで、受信されたワイヤレス信号の測定されたパラメータ(RSSIおよび/またはRTT)とワイヤレス信号アクセスポイントの推定位置とに基づいて、移動局のワイヤレス信号に基づく位置推定値を判断する(408)。ワイヤレス信号に基づく位置推定値に対応するワイヤレス信頼性レベルも判断され得る。たとえば、移動局位置は、上記で説明したように、RSSIとRTTとを使用してアクセスポイントまでの距離を推定し得る。推定距離とアクセスポイントの推定位置とを使用して、たとえば、三辺測量を使用して移動局の位置が判断され得る。
【0032】
たとえば、図4中のステップ202による移動局の推定位置は、ワイヤレス信頼性レベルと推定位置に関連する信頼性レベルとを使用して、推定位置をワイヤレス信号に基づく位置推定値と融合させる(410)ことによって改善され、融合された位置推定値は、移動局の現在の位置としてメモリ154に記憶され、および/またはディスプレイ162に表示され得る。たとえば、ワイヤレス信号に基づく位置推定値は、たとえば、位置推定値の信頼性の推定値とともにロケーションエンジン159に与えられ得、ロケーションエンジン159は、ワイヤレス信号に基づく位置推定値をSPS拡張デッドレコニングに基づく前の位置推定値に基づく位置推定値と組み合わせ得る。前の位置推定値も、前に判断されたワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニング位置であり得ることを理解されたい。同様に、上記で説明したように、ステップ402におけるワイヤレス信号測定ロケーションの推定位置は、前に判断されたワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニング位置に基づき得る。
【0033】
さらに、移動局は、ワイヤレストランシーバ135を介して、サーバ、たとえば、図2中のサーバ112にアクセスし、他の移動局がアクセスするために推定アクセスポイントロケーションをアップロードし得る。一実施形態では、アクセスポイントロケーションの信頼性推定値も与えられ、サーバは、他の移動局から取得されたアクセスポイントロケーションと信頼性推定値とを使用してアクセスポイントロケーション推定値を改善する。使用中に、移動局は、ロケーション、たとえば、建築物300に入るときにサーバ112にアクセスし、上記で説明したように、移動局がナビゲーションのために使用し得るアクセスポイントロケーションデータをサーバに問い合わせ得る。
【0034】
上記で説明したように、ワイヤレス信号ロケーションは、移動局において生成され、記憶されたものとは対照的に、外部データベースに記憶され得る。たとえば、移動局100はワイヤレス信号を受信し、RSSIまたはRTTなど、1つまたは複数のパラメータを測定し得、それがネットワーク110上の外部サーバ112に与えられる。サーバ112は、それに応答して、対応するワイヤレス信号に基づく位置推定値を、所望される場合、信頼性レベルとともに返し得る。サーバ112から返されたワイヤレス信号に基づく位置推定値(と信頼性レベル)は、たとえば、デッドレコニングに基づいて前に判断された位置推定値とともにロケーションエンジン159に与えられ得、上記で説明したように、異なる位置推定値からの信頼性レベルを使用して、融合された位置推定値が生成され得る。たとえば、位置推定値をそれらのそれぞれの信頼性レベルに基づいて重み付けすることによって、たとえば、より高い信頼性レベルにより大きい重みを与えること、たとえば、重み付き平均によって、融合された位置推定値を生成した後、位置推定値を組み合わせて、最終的な融合された位置推定値を取得し得る。位置推定値を更新するために、サーバ112は、たとえば、時間または動きに基づいて周期的にアクセスされ得る。
【0035】
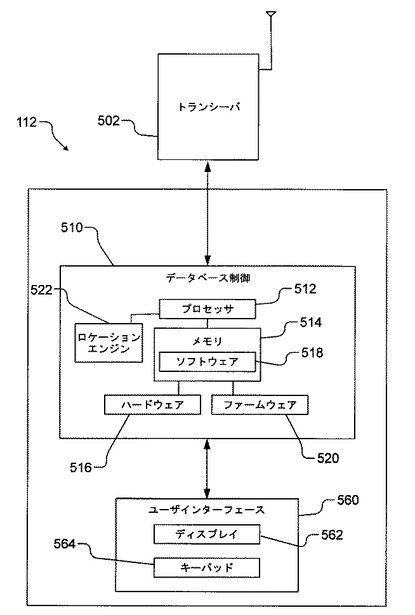
図7は、移動局によって受信されたワイヤレス信号のパラメータに基づいて位置情報を移動局に与え得るサーバ112のブロック図である。図7に示すように、サーバ112はトランシーバ502に結合され、トランシーバ502はサーバ112をネットワーク110に接続する(図2)。トランシーバ502はワイヤレストランシーバとして示されているが、ワイヤードであり得ることを理解されたい。所望される場合、トランシーバはサーバ112の内部にあり得る。トランシーバ502は、サーバ制御510に接続され、サーバ制御510と通信する。サーバ制御510は、トランシーバ502からのデータを受け付けて処理し、デバイスの動作を制御する。サーバ制御510は、プロセッサ512および関連メモリ514と、ハードウェア516と、ソフトウェア518と、ファームウェア520とによって与えられ得る。サーバ112は、トランシーバ502から受信したデータを処理するロケーションエンジン522と、それに応答して送信されるべき位置を判断するためにメモリ514に記憶されたワイヤレスロケーションデータベースとをさらに含む。サーバ112はまた、たとえば、ディスプレイ532とキーパッド534とを含む、サーバ112と通信しているユーザインターフェース530を含み得、たとえば、サーバ制御510は、データを受け付け、ユーザインターフェース530を制御する。
【0036】
移動局におけるプロセッサ152の場合と同様に、本明細書で使用するプロセッサ512は、1つまたは複数のマイクロプロセッサ、組込みプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)などを含むことができるが、必ずしも含む必要はないことを理解されよう。プロセッサという用語は、特定のハードウェアではなく、システムによって実装される機能を表すものとする。さらに、本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、またはサーバに関連する他のメモリを含むいずれかのタイプのコンピュータ記憶媒体を指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0037】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア516、ファームウェア520、ソフトウェア518、またはそれらの任意の組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0038】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいずれの機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ514に記憶され、プロセッサ512によって実行され得る。メモリは、プロセッサユニットの内部および/またはプロセッサユニットの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0039】
ファームウェアおよび/またはソフトウェアで実装する場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。例としては、データ構造で符号化されたコンピュータ可読媒体、およびコンピュータプログラムで符号化されたコンピュータ可読媒体がある。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フレキシブルディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0040】
コンピュータ可読媒体上での記憶に加えて、命令および/またはデータは、通信装置中に含まれる伝送媒体上の信号として与えられ得る。たとえば、通信装置は、命令とデータとを示す信号を有するトランシーバを含み得る。命令およびデータは、1つまたは複数のプロセッサに特許請求の範囲で概説する機能を実装させるように構成される。すなわち、通信装置は、開示した機能を実行するための情報を示す信号をもつ伝送媒体を含む。初めに、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第1の部分を含み得、次に、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第2の部分を含み得る。
【0041】
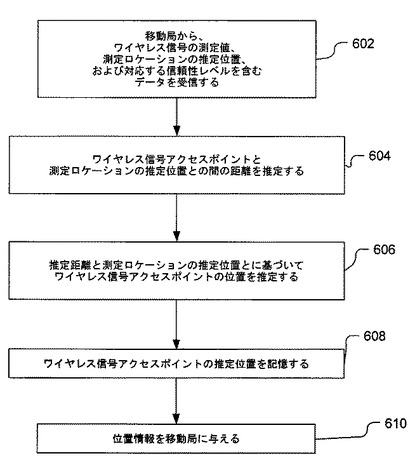
図8は、移動局によって受信されたワイヤレス信号を使用して移動局位置判断を支援するためのサーバデータベースを確立するフローチャートである。図8に示すように、サーバは、ワイヤレスフィンガープリント情報、測定ロケーションの位置推定値および位置推定値の信頼性レベルなどの移動局データを受信する(602)。データベースが確立されると、測定ロケーションの位置推定値および信頼性レベルはもはや必要とされないことがある。上記で説明したように、ワイヤレスフィンガープリント情報は、たとえば、3つ以上のアクセスポイントの、たとえば、移動局によって受信されたワイヤレス信号のRSSIおよび/またはRTTを含み得る。測定ロケーションの位置推定値は、SPS拡張デッドレコニングまたはワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニングに基づき得る。移動局はまた、ワイヤレスロケーションを推定するとき、同じ移動局からの連続する測定値間の距離推定値を可能にするために、ワイヤレス信号測定値のタイムスタンプおよび移動局識別情報を与え得る。
【0042】
移動局においてバッテリー寿命および帯域幅を節約するために、移動局中の動きセンサ120が移動を示す場合、エリアがワイヤレス信号によってカバーされる場合、およびエリアがデータベース中にまだ正確に反映されていない場合、データベース構築の目的で、推定位置およびワイヤレスロケーションはサーバに与えられ得る。たとえば、移動局が、測定されたワイヤレス信号パラメータをサブミットした後、位置推定値を受信しないとき、エリアがデータベース中にまだ正確に反映されていないことは明白であり得る。さらに、移動局においてバッテリー寿命を節約するために、SPSシステムを使用せずに移動局における位置判断を行うことができ、それによって、使用する電力が減り、SPSシステムを使用して数分かかることがある、最初の位置フィックスを取得する際に、遅延をほとんどまたはまったく生じないように、本方法は、SPSとワイヤレス信号の両方のカバレージを有するエリアに拡張され得る。
【0043】
受信されたデータに基づいて、ワイヤレス信号アクセスポイントとワイヤレス信号の測定ロケーションの推定位置との間の距離を、チャネルモデルを使用して判断する(604)。距離推定は、複数の移動局からのデータが使用され得ることを除き、ブロック404(図6)において説明する推定と同様に実行され得る。一実施形態では、距離推定値は、高度の信頼性を有する移動局位置についてのみ作成される。より信頼できない距離推定値は、コスト関数に対するそれらの影響を減衰させることによる最小化の過程で考慮に入れられ得る。
【0044】
次いで、推定距離と測定ロケーションの推定位置とに基づいてワイヤレス信号アクセスポイントの位置を推定する(606)。さらに、次いで、推定距離と移動局位置とに基づいてワイヤレス信号フィンガープリントにおける位置を推定する(606)。アクセスポイントの推定位置および/またはフィンガープリントを(対応する信頼性レベルとともに)、たとえば、メモリ514中のデータベースに記憶する(608)。サーバは、移動局に位置情報を与える(610)。たとえば、データベースがアクセスポイントの推定位置を含んでいる場合、サーバは移動局から情報を受信したこと(602)に応答して、アクセスポイントの推定位置を与え得る。次いで、移動局は、アクセスポイントの位置の与えられた推定値(と対応する信頼性レベル)、ならびにチャネルモデルおよびワイヤレス信号の測定値を使用してワイヤレスベース位置推定値を判断し得、次いで、上記で説明したように、そのワイヤレスベース位置推定値がSPS拡張デッドレコニング位置推定値と融合され得る。代替または追加として、データベースは、ワイヤレス信号フィンガープリントと、ワイヤレスフィンガープリント内の異なるロケーションの対応するワイヤレスベース位置推定値および対応する信頼性推定値とを含み得る。サーバは、ワイヤレスベース位置推定値と信頼性レベルとを移動局に与え(610)、移動局は、ワイヤレスベース位置推定値をSPS拡張デッドレコニング位置推定値と融合させ得る。代替的に、サーバは、移動局によって与えられたSPS拡張デッドレコニング位置推定値(602)をワイヤレスベース位置推定値と融合させ得、融合された位置推定値を移動局に与える。
【0045】
アクセスポイントの位置を抑制している多数のフィンガープリント、たとえば、パイロット強度測定から導出されたアクセスポイントまでの距離、ならびにデッドレコニングから導出された、互いに対するフィンガープリントの相対位置により、アクセスポイントの推定位置は正確である。フィンガープリント自体に対応する位置推定値は、マルチパスによってある程度影響を及ぼされる。したがって、移動局のこれらの位置推定値は、アクセスポイントロケーション推定値と比較して雑音が多い。ただし、アクセスポイントが正確に配置される限り、フィンガープリントの位置推定値に、不正確なアクセスポイント位置によるバイアスは生じない。
【0046】
本発明は特定の実施形態に関して説明の目的で示されているが、本発明はそれに限定されない。本発明の範囲から逸脱することなく、様々な適応および改変を行い得る。したがって、添付の特許請求の範囲の趣旨および範囲は、上記の説明に限定されるべきではない。
【符号の説明】
【0047】
100 移動局
102 衛星ビークル
104 ワイヤレス通信アクセスポイント
106 セルラータワー
110 ネットワーク
112 サーバ
120 動きセンサ
122 加速度計
124 磁力計
130 カメラ
135 ワイヤレストランシーバ
140 SPS受信機
144 アンテナ
150 移動局制御
152 プロセッサ
153 クロック
154 メモリ
155 受信信号強度インジケータシステム(RSSI)
156 ハードウェア
157 ファームウェア
158 ソフトウェア
159 ロケーションエンジン
160 ユーザインターフェース
162 ディスプレイ
164 キーパッド
300 建築物
302 ワイヤレスアクセスポイント
303 ワイヤレス信号
304 ワイヤレスアクセスポイント
305 ワイヤレス信号
306 カバレージエリア
310 移動局が建築物中を移動する経路
310A 位置
310B 位置
310C 位置
310D 位置
310E 位置
312 ガラスドア
502 トランシーバ
510 サーバ制御
512 プロセッサ
514 メモリ
516 ハードウェア
518 ソフトウェア
520 ファームウェア
522 ロケーションエンジン
530 ユーザインターフェース
532 ディスプレイ
534 キーパッド
【技術分野】
【0001】
ワイヤレス信号を使用した位置の判断方法および装置に関する。
【背景技術】
【0002】
セルラー通信デバイスまたは他のワイヤレス通信デバイスなど、移動局の正確な位置情報を取得することが、通信産業において普及しつつある。Global Positioning System(GPS)は、ワイヤレス移動局位置判断を行う手法を提供する。GPSユーザは、地球の周りの軌道にある衛星ビークル(SV)から獲得された情報を通して、3次元位置、速度および時刻を含む正確なナビゲーション情報を 導出することができる。SVから受信された信号は一般にかなり弱い。したがって、受信機の位置を判断するために、受信機は、これらの弱い信号を受信し、それらによって表される情報を解釈するために十分に高感度である必要がある。
【0003】
現在のGPS受信機の1つの制限は、それらの動作が、複数の衛星が障害なしにはっきり見え、そのような信号を受信するために良好な品質のアンテナが適切に配置されている状況に限定されることである。したがって、それらは、生い茂った葉または建築物障害物(たとえば、ビルの谷間)などの障害物状態があるエリアおよび屋内では、通常、使用不可能である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS測位における制限を補償するための1つの方法は、デッドレコニングの使用である。デッドレコニングは、前に決定された位置と、たとえば、モーションセンサまたは他のセンサによって測定された、前に決定された位置から移動した方向および距離とに基づいて現在の位置を推定するために使用される。しかしながら、デッドレコニング測定にはドリフトエラーという欠点があり得る。たとえば、加速度計におけるドリフトは、測定された移動距離に影響を及ぼし得る。エスカレータの水平移動など、さらなる環境要因が距離測定に影響を及ぼし得る。さらに、地磁界障害(異常)が磁気測定に影響を及ぼし、進行方向の誤差を生じ得る。したがって、デッドレコニングの使用により、位置判断は経時的にますます不正確になる。したがって、移動局の位置判断の改善が望まれる。
【課題を解決するための手段】
【0005】
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、受信信号強度および/または往復時間など、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、ワイヤレス信号のうちの1つまたは複数のパラメータを測定し、それをデータベースと比較して、ワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング推定値は、移動局の推定位置を改善するために、それぞれの信頼性レベルを使用してワイヤレス信号に基づく位置推定値と融合され得る。
【0006】
ワイヤレス信号ロケーションデータベースは、移動局の位置の判断を支援するために使用される。ワイヤレス信号ロケーションデータベースは、移動局内で、または移動局によってアクセスされるオンラインサーバにおいて生成され得る。データベースは、ワイヤレス信号の測定されたパラメータと測定ロケーションの推定位置とを受信することによって生成される。ワイヤレス信号アクセスポイントと測定ロケーションとの間の距離は、たとえば、ワイヤレス信号の往復時間または経路損失に基づいて推定される。次いで、推定距離と測定ロケーションの推定位置とに基づいてワイヤレス信号アクセスポイントの位置が推定される。ワイヤレス信号アクセスポイントの推定位置および対応する信頼性レベルは、データベースに記憶される。ワイヤレス信号アクセスポイントの記憶された位置および対応する信頼性レベルは、アクセスポイントからのワイヤレス信号を使用して移動局の位置を推定するのを支援するために使用され得る。
【図面の簡単な説明】
【0007】
【図1】たとえば、ワイヤレス通信アクセスポイントまたはセルラータワーからのワイヤレス信号を使用して、それの位置を判断することが可能である移動局を示す図である。
【図2】移動局がワイヤレス信号を使用してそれの位置を判断し得るシステムを示すブロック図である。
【図3】ワイヤレス信号を使用してそれの位置を判断することが可能な移動局のブロック図である。
【図4】移動局のワイヤレス信号をデッドレコニングと組み合わせて使用して位置を判断する方法を示すフローチャートである。
【図5】2つのワイヤレスアクセスポイントをもつ建築物を示す図である。
【図6】移動局においてワイヤレス信号ロケーションデータベースを生成する方法を示すフローチャートである。
【図7】移動局によって受信されたワイヤレス信号のパラメータに基づいて位置情報を生成し、移動局に与え得るサーバのブロック図である。
【図8】移動局によって受信されたワイヤレス信号を使用して移動局位置判断を支援するためのサーバデータベースを確立するフローチャートである。
【発明を実施するための形態】
【0008】
図1に、たとえば、アクセスポイントと総称されることがある、ワイヤレス通信アクセスポイント104またはセルラータワー106からのワイヤレス信号を使用して、それの位置を判断することが可能である移動局100を示す。ワイヤレス信号を使用して判断された測位情報は、衛星ビークル102を使用した衛星測位システム(SPS)、ならびに磁力計および加速度計などの動きセンサによるデッドレコニングなど、他の測位機構とともに使用され得る。ワイヤレス信号を使用した位置判断は、移動局が建築物内にあるとき、あるいはSPSカバレージがほとんどまたはまったくない他の環境内にあるときなど、SPSシステムが利用不可能であるときに特に有用であり得る。ワイヤレス信号位置判断は、SPSカバレージが弱いかまたはないシナリオにおいてデッドレコニングエラーを低減するために使用され得、それによって、歩行者または他のタイプのナビゲーションおよびロケーションベースの広告などのアプリケーションの精度を上げる。
【0009】
本明細書で使用する移動局(MS)は、セルラーまたは他のワイヤレス通信デバイス、パーソナル通信システム(PCS)デバイス、パーソナルナビゲーションデバイス(PND)、個人情報マネージャ(PIM)、携帯情報端末(PDA)、ラップトップまたはワイヤレス通信および/またはナビゲーション測位信号などのナビゲーション信号を受信することが可能な他の適切なモバイルデバイスなどのデバイスを指す。また、「移動局」という用語は、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するかパーソナルナビゲーションデバイス(PND)で発生するかにかかわらず、短距離ワイヤレス、赤外線、ワイヤライン接続、または他の接続などによってPNDと通信するデバイスを含むものとする。また、「移動局」は、インターネット、WiFi、または他のネットワークなどを介するサーバとの通信が可能であり、衛星信号受信、支援データ受信、および/または位置に関係する処理がデバイスにおいて行われるか、サーバにおいて行われるか、ネットワークに関連する別のデバイスにおいて行われるかにかかわらず、ワイヤレス通信デバイス、コンピュータ、ラップトップなどを含むすべてのデバイスを含むものとする。上記の任意の動作可能な組合せも「移動局」と見なされる。
【0010】
衛星測位システム(SPS)は、一般に、送信機から受信した信号に少なくとも部分的に基づいて地球上または地球上空のエンティティのロケーションをそれらのエンティティが判断できるように配置された送信機のシステムを含む。そのような送信機は、一般に、設定された数のチップの反復する擬似雑音(PN)コードでマークされた信号を送信し、地上ベースの制御局、ユーザ機器、および/または宇宙ビークル上に配置され得る。特定の例では、そのような送信機は、図1に示す地球周回軌道衛星ビークル(SV)102上に配置され得る。たとえば、Global Positioning System(GPS)、Galileo、GlonassまたはCompassなどのGlobal Navigation Satellite System(GNSS)のコンスタレーション中のSVは、(たとえば、GPSの場合のように各衛星について異なるPNコードを使用して、またはGlonassの場合のように異なる周波数上の同じコードを使用して)コンスタレーション中の他のSVによって送信されたPNコードとは区別可能なPNコードでマークされた信号を送信し得る。
【0011】
いくつかの態様によれば、本明細書で提示した技法は、SPSについての全地球システム(たとえば、GNSS)に限定されない。たとえば、本明細書に記載する技法は、日本のQuasi-Zenith Satellite System(QZSS)、インドのIndian Regional Navigational Satellite System(IRNSS)、中国のBeidouなどの様々な地域システム、および/または1つまたは複数の全地球および/または地域ナビゲーション衛星システムに関連付けられ得るか、または場合によってはそれらのシステムとともに使用することが可能な、様々なオーグメンテーションシステム(たとえば、Satellite Based Augmentation System(SBAS))に適用され得るか、または場合によってはこれらのシステムとともに使用することが可能である。限定ではなく例として、SBASは、たとえば、Wide Area Augmentation System (WAAS)、European Geostationary Navigation Overlay Service (EGNOS)、Multi-functional Satellite Augmentation System (MSAS)、GPS Aided Geo Augmented NavigationまたはGPSおよびGeo Augmented Navigationシステム(GAGAN)など、完全性情報、差分補正などを行うオーグメンテーションシステムを含み得る。したがって、本明細書で使用するSPSは、1つまたは複数のグローバルおよび/または領域ナビゲーション衛星システム、ならびに/あるいは1つまたは複数のグローバルおよび/または領域オーグメンテーションシステムの任意の組合せを含み得、SPS信号は、SPS信号、SPS様の信号、および/またはそのような1つまたは複数のSPSに関連する他の信号を含み得る。
【0012】
本明細書で説明する位置判断技法は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、セルラータワー106を含む様々なワイヤレス通信ネットワークに関連して、ワイヤレス通信アクセスポイント104から実装され得るので、移動局100は、位置判断のためのSPSとの使用に限定されない。さらに、移動局100は、衛星画像などのデータを取得するために、様々なワイヤレス通信ネットワークを使用して、セルラータワー106を介してワイヤレス通信アクセスポイント104から、または所望される場合、衛星ビークル102を使用して、オンラインサーバにアクセスし得る。「ネットワーク」および「システム」という用語は、しばしば互換的に使用される。WWANは、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、シングルキャリア周波数分割多元接続(SC-FDMA)ネットワーク、Long Term Evolution(LTE)などであり得る。CDMAネットワークは、cdma2000、広帯域CDMA(W-CDMA)などの1つまたは複数の無線アクセス技術(RAT)を実装し得る。cdma2000は、IS-95標準、IS-2000標準、およびIS-856標準を含む。TDMAネットワークは、Global System for Mobile Communications(GSM(登録商標))、Digital Advanced Mobile Phone System(D-AMPS)、または何らかの他のRATを実装し得る。GSM(登録商標)およびW-CDMAは、「3rd Generation Partnership Project」(3GPP)という名称の組織からの文書に記載されている。Cdma2000は、「3rd Generation Partnership Project 2」(3GPP2)という名称の組織からの文書に記載されている。3GPPおよび3GPP2の文書は公的に入手可能である。WLANは、IEEE802.11xネットワークであり得、WPANは、Bluetooth(登録商標)ネットワーク、IEEE802.15xネットワーク、または他の何らかのタイプのネットワークであり得る。本技法はまた、WWAN、WLAN、および/またはWPANの任意の組合せに関して実装され得る。
【0013】
図2は、移動局100がワイヤレス信号を使用してそれの位置を判断し得るシステムを示すブロック図である。図示のように、移動局100は、衛星ビークル102を含むSPSシステムを使用してそれの位置を判断することが可能である。さらに、移動局100は、SPSシステムが利用不可能であるとき、磁力計および加速度計などの動きセンサ120と前の絶対位置推定値とを使用してそれの位置を判断することが可能である。移動局100は、ワイヤレスアクセスポイント104から(または図1に示すセルラータワー106から)ワイヤレス信号を受信し、それらの信号を使用して位置判断を支援する。例として、使用され得るワイヤレス信号は、WLAN、UMTS、GSM(登録商標)、Bluetooth(登録商標)またはこれらの組合せを含む。移動局100は、ワイヤレス信号のための信号の強度または往復時間を測定し、それらの値をワイヤレスフィンガープリントのデータベースと比較して移動局100のワイヤレス信号に基づく位置推定値を判断する。例として、ワイヤレスロケーション、たとえば、ワイヤレス信号フィンガープリントまたはワイヤレスアクセスポイント位置のデータベースは、移動局100のメモリにおいて生成され、記憶され得る。代わりに、移動局は、ネットワーク110を通して、たとえば、ワイヤレスアクセスポイント104またはセルラータワー106を介して、ワイヤレスロケーションデータベースをもつサーバ112にアクセスし、問い合わせ得る。
【0014】
図3は移動局100のブロック図である。図3に示すように、移動局100は、加速度計122および磁力計124を含み得る動きセンサ120を含み得る。動きセンサ120は、所望される場合、ジャイロスコープ、圧力センサ、またはカメラなど、追加または代替デバイスを含み得る。車両、自転車または車椅子ナビゲーションの場合、追加のタイプのセンサは車両走行距離計またはホイールチックセンサであり得る。磁力計124、ならびにジャイロスコープ、圧力センサ、またはカメラなどのセンサは、たとえば、方向、距離または高度の変化に関して動きの判断を支援し得るので、本明細書では動きセンサ120と見なされる。移動局100は、衛星測位システム(SPS)衛星102(図1)からアンテナ144を介して信号を受信するSPS受信機140を含む。移動局100はまた、たとえば、ワイヤレスアクセスポイント104との間でアンテナ144を介して通信を送信および受信することが可能である、ワイヤレスネットワーク無線受信機/送信機であり得る、ワイヤレストランシーバ135を含む。移動局100はまた、セルラータワー106との間で通信を送信および受信することが可能である、ワイヤレストランシーバ135とは別個またはそれの一部であるセルラーモデムを含み得る。
【0015】
動きセンサ120中の加速度計122および磁力計124、SPS受信機140、ならびにワイヤレストランシーバ135は、移動局制御150に接続され、それと通信する。移動局制御150は、動きセンサ120、SPS受信機140、およびワイヤレストランシーバ135からのデータを受け付けて処理し、デバイスの動作を制御する。移動局制御150は、プロセッサ152および関連メモリ154と、クロック153と、ハードウェア156と、ソフトウェア158と、ファームウェア157とによって与えられ得る。移動局150は、プロセッサ152とは別個またはそれの一部であり得る受信信号強度インジケータシステム(RSSI)155をさらに含む。RSSIシステム155は、ワイヤレストランシーバ135によって受信された無線信号の信号強度を判断し、測定された信号強度をプロセッサ152に与える。さらに、プロセッサ152は、アクセスポイントへの信号を生成し、ワイヤレス信号の往復時間を判断するために応答を受信する時間を監視するようにワイヤレス受信機135を制御し得る。
【0016】
移動局150は、明快のためにプロセッサ152とは別個に示されているが、プロセッサ152内にもあり得るロケーションエンジン159をさらに含む。ロケーションエンジン159は、移動局100の位置を判断するために、SPSデータ、デッドレコニングデータ、およびワイヤレス信号データを含む測位データと、ワイヤレスロケーションデータベースとを処理する。ワイヤレスロケーションデータベースは、メモリ154に、または代替的に、ワイヤレストランシーバ135を介してアクセスされるサーバデータベースに記憶され得る。さらに、いくつかの実施形態では、ロケーションエンジンは、ワイヤレストランシーバ135を介してアクセスされ、問い合わせられる、ネットワーク110中のサーバ、たとえば、図2中のサーバ112上にも配置され得る。
【0017】
本明細書で使用するプロセッサ152は、1つまたは複数のマイクロプロセッサ、組込みプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)などを含むことができるが、必ずしも含む必要はないことを理解されよう。プロセッサという用語は、特定のハードウェアではなく、システムによって実装される機能を表すものとする。さらに、本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、または移動局に関連する他のメモリを含むいずれかのタイプのコンピュータ記憶媒体を指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0018】
移動局100はまた、移動局制御150と通信しているユーザインターフェース160を含み、たとえば、移動局制御150は、データを受け付け、ユーザインターフェース160を制御する。ユーザインターフェース160は、カメラ130によって生成されたイメージならびに制御メニューと位置情報とを表示するディスプレイ162を含み得る。ユーザインターフェース160は、ユーザが移動局100に情報を入力することができるキーパッド164または他の入力デバイスをさらに含む。一実施形態では、キーパッド164は、タッチスクリーンディスプレイなどのディスプレイ162に組み込まれ得る。ユーザインターフェース160はまた、たとえば、移動局100がセルラー電話であるとき、たとえば、マイクロフォンとスピーカーとを含み得る。
【0019】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア156、ファームウェア157、ソフトウェア158、またはそれらの任意の組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0020】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいずれの機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ154に記憶され、プロセッサ152によって実行され得る。メモリは、プロセッサユニットの内部および/またはプロセッサユニットの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0021】
ファームウェアおよび/またはソフトウェアで実装する場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。例としては、データ構造で符号化されたコンピュータ可読媒体、およびコンピュータプログラムで符号化されたコンピュータ可読媒体がある。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フレキシブルディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0022】
コンピュータ可読媒体上での記憶に加えて、命令および/またはデータは、通信装置中に含まれる伝送媒体上の信号として与えられ得る。たとえば、通信装置は、命令とデータとを示す信号を有するトランシーバを含み得る。命令およびデータは、1つまたは複数のプロセッサに特許請求の範囲で概説する機能を実装させるように構成される。すなわち、通信装置は、開示した機能を実行するための情報を示す信号をもつ伝送媒体を含む。初めに、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第1の部分を含み得、次に、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第2の部分を含み得る。
【0023】
図4は、ワイヤレス信号をデッドレコニングと組み合わせて使用して移動局の位置を判断する方法を示すフローチャートである。図4に示すように、移動局の推定位置を、対応する信頼性レベルとともに判断する(202)。推定位置は、たとえば、SPS拡張デッドレコニングを使用して判断され得る。たとえば、移動局の位置がSPSシステムを使用して判断され得、たとえば、SPSシステムからのデータがSPS受信機140(図3)によって受信され、そこからプロセッサ152またはロケーションエンジン159が位置を計算する。移動局の改善された位置推定値は、前のおよび現在のSPSベース位置フィックスを収集し、動きセンサ(120)によって受信されたデータによるデッドレコニングに基づいて、これらの絶対位置推定値を相対位置推定値と組み合わせることによって取得され得る。所望される場合、たとえば、SPSカバレージが弱いかまたはない場合、位置推定値は、セルラータワー106を含む他の様々なワイヤレス通信ネットワークから、およびワイヤレス通信アクセスポイント104からのデータを、動きセンサ(120)によって受信されたデータによるデッドレコニングに基づく相対位置推定値と組み合わせて使用することを含む他の技法およびデバイスを使用して向上され得る。
【0024】
説明のために、図5に、それぞれワイヤレス信号303および305をもつ2つのワイヤレスアクセスポイント302および304をもつ建築物300を示す。建築物300は、モール中の店舗など、いくつかの部屋を含み得る。建築物300の外部で、SPSシステムのカバレージエリア306はハッチングで示され、これは建築物中に小さい距離延びている。移動局が建築物中を移動する経路310が点線で示されている。移動局が建築物の外部にある間、移動局は十分なSPSシステムカバレージを有し、したがって正確な位置フィックスを取得する。移動局が建築物に入ると(位置310A)、移動局の位置は、漸進的により不正確になるSPS位置推定値と組み合わされたデッドレコニングに基づいて推定される。デッドレコニングからの推定位置は、図3に示す移動局100中の加速度計122および磁力計124などの動きセンサ120を使用して生成され得る。動きセンサ120からの位置データは、プロセッサ152またはロケーションエンジン159に与えられる。したがって、推定位置は、最新の既知の正確な位置と動きセンサ120からの累積位置データとに基づいて生成される。ただし、デッドレコニング位置推定値は、通常、たとえば、100mに関して1m〜5mドリフトする。さらに、磁力計に影響を及ぼす磁気障害がある場合、または水平エスカレータが使用された場合、デッドレコニング位置推定値のドリフトはより一層重大であり得る。
【0025】
デッドレコニング位置推定値のドリフトを補正するために、移動局によって受信されたワイヤレス信号が、位置判断を支援するために使用される。たとえば、図5を参照すると、移動局は、位置310Bにおいてアクセスポイント302からワイヤレス信号303を受信し、位置310Dにおいてアクセスポイント304からワイヤレス信号305を受信する。位置310Cにおいて、移動局はワイヤレス信号303および305を両方とも受信することができる。ワイヤレス信号303および305の測定されたパラメータは、移動局の位置を推定するのを支援するために使用され得る。
【0026】
図4を参照すると、たとえば、ワイヤレストランシーバ135によって、ワイヤレス信号を受信すると(204)、ワイヤレスフィンガープリントと呼ばれることがあるワイヤレス信号のパラメータを測定する。たとえば、ワイヤレス信号の信号強度を、たとえば、(RSSI)155によって判断する(206)。代替または追加として、ワイヤレス信号の往復時間を判断する(208)。例として、プロセッサ152は、復帰信号で応答するローカルアクセスポイントへのワイヤレス信号を生成するようにワイヤレストランシーバを制御し得る。プロセッサ152は、ワイヤレス信号の往復時間(RTT)を判断するためにクロック153を使用する。たとえば、3つ以上のアクセスポイントのRSSIおよび/またはRTTが測定され得る。ワイヤレス信号の測定されたパラメータ、たとえば、RSSIまたはRTTを使用して、移動局の位置推定値を改善し(208)、改善された位置推定値を、たとえば、ディスプレイ162上に表示するか、またはアプリケーションによって使用されるためにメモリ154に記憶する(210)。たとえば、位置推定値は、SPS拡張デッドレコニング位置推定値とワイヤレスフィンガープリントに関連する位置推定値とを、それぞれの位置推定値に関連する信頼性レベルを考慮に入れて融合させることによって改善され得る。
【0027】
測定されたパラメータ、たとえば、ワイヤレス信号のRSSIまたはRTTを使用して位置推定値を改善するために(208)、測定されたパラメータは、移動局100に記憶され得るか、または代替的に外部データベースに記憶され得るワイヤレス信号フィンガープリントと比較される。ワイヤレス信号フィンガープリントは、すべての受信されたアクセスポイントからのRSSIおよび/または往復時間測定値として定義される。ワイヤレス信号フィンガープリントは、位置に関してほぼ一意である。
【0028】
一実施形態では、ワイヤレス信号フィンガープリントは移動局100に記憶される。図6は、移動局を使用してワイヤレス信号ロケーションデータベースを生成する方法を示すフローチャートであり、ワイヤレス信号ロケーションは、ワイヤレスフィンガープリントまたはワイヤレスアクセスポイント位置であり得る。図示のように、複数の測定ロケーションについて、ワイヤレス信号のパラメータを測定し、たとえば、移動局100中のメモリ154(図3)に記憶する(402)。さらに、測定ロケーションの推定位置を判断し、記憶する(402)。たとえば、移動局がワイヤレスアクセスポイントのカバレージに、たとえば、図5中の位置310Bに移動すると、ワイヤレスアクセスポイント302によって生成されたワイヤレス信号303のRSSIおよび/またはRTTが測定され、移動局の位置推定値とともに記憶される。さらに、推定された位置の信頼性レベルが判断され、記憶され得る。測定ロケーションの位置推定値は、SPS拡張デッドレコニングまたはワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニングに基づいて判断され得る。位置推定値の信頼性は、最後のSPS位置フィックスからの距離または時間の関数であり得る。
【0029】
ワイヤレス信号アクセスポイントと測定ロケーションの推定位置との間の距離を推定する(404)。ワイヤレスアクセスポイントから測定ロケーションまでの距離の推定は、チャネルモデルを使用して判断され得、往復時間測定値および/または経路損失測定値に基づき得る。経路損失測定値に基づく推定距離は、ワイヤレスアクセスポイント送信電力の知識を仮定する。チャネルでは、マルチパスを考慮に入れるべきであり、さもなければ距離推定値が影響を受ける。受信機への間接的経路をとるか、またはどこかで反射されるワイヤレス信号は、往復時間推定値とRSSIとによって距離推定値が影響を及ぼされる。移動局がアクセスポイントに関して非見通し線位置から見通し線位置に移動すると、ワイヤレス信号に基づく距離推定値は、デッドレコニングによる位置の変化よりも大きく変化する。たとえば、図5では、移動局はガラスドア312を通して位置310Bから位置310Eに移動し得、RSSIが大きく増加することになり、位置が大きく変化したことを示す。しかしながら、デッドレコニング位置の変化は、位置の小さい変化のみを示す。距離推定値は、連続する位置推定値間の差であり、したがって、デッドレコニングは少量の時間の間は正確であり、すなわち、ドリフトはほとんどまたはまったく発生しないので、正確であると見なされる。したがって、測定された往復時間および経路損失の少なくとも1つの変化が、対応する測定ロケーションの推定位置の変化と比較され得、比較を使用して、アクセスポイント間の距離を推定するために使用されるチャネルモデルを変更する。たとえば、一実施形態では、遷移距離は、デッドレコニングに基づいて、およびワイヤレス信号に基づいて、たとえば、遷移が生成される間の距離推定値の差をワイヤレス信号に基づいてとることによって判断され得る。ワイヤレス信号に基づくアクセスポイントまでの推定距離は、デッドレコニング遷移距離よりも大きい距離推定値の差よって補正される。代替または追加として、デッドレコニング位置の変化との不整合によって判断された、マルチパスによって影響を及ぼされるワイヤレス信号ベース距離推定値に、より低い信頼性がアタッチされる。さらに、移動局の位置推定値が、より信頼できないデッドレコニングを介して取得された場合、距離推定値により低い信頼性がアタッチされ得る。
【0030】
次いで、いくつかの推定距離と測定ロケーションの推定位置とに基づいてワイヤレスアクセスポイントの位置を推定する(406)。測定ロケーションの推定位置の信頼性レベルならびに推定距離の信頼性レベルは、アクセスポイントロケーションの判断においても使用され得る。たとえば、あまり信頼できない推定位置または距離推定値が、コスト関数に対するそれらの影響を減衰させることによる最小化の過程で考慮に入れられ得る。さらに、ワイヤレス信号アクセスポイントの推定位置の信頼性レベルが判断され得る。判断されたアクセスポイントロケーションは、移動局が現在のロケーション、たとえば、建築物300にある間に使用するために、メモリ154中のデータベースに記憶され得る。判断されたアクセスポイントロケーションは、将来の使用のため、たとえば、移動局が建築物300に戻ったときのためにも記憶され得る。
【0031】
アクセスポイントロケーションのデータベースが生成されると、次いで、受信されたワイヤレス信号の測定されたパラメータ(RSSIおよび/またはRTT)とワイヤレス信号アクセスポイントの推定位置とに基づいて、移動局のワイヤレス信号に基づく位置推定値を判断する(408)。ワイヤレス信号に基づく位置推定値に対応するワイヤレス信頼性レベルも判断され得る。たとえば、移動局位置は、上記で説明したように、RSSIとRTTとを使用してアクセスポイントまでの距離を推定し得る。推定距離とアクセスポイントの推定位置とを使用して、たとえば、三辺測量を使用して移動局の位置が判断され得る。
【0032】
たとえば、図4中のステップ202による移動局の推定位置は、ワイヤレス信頼性レベルと推定位置に関連する信頼性レベルとを使用して、推定位置をワイヤレス信号に基づく位置推定値と融合させる(410)ことによって改善され、融合された位置推定値は、移動局の現在の位置としてメモリ154に記憶され、および/またはディスプレイ162に表示され得る。たとえば、ワイヤレス信号に基づく位置推定値は、たとえば、位置推定値の信頼性の推定値とともにロケーションエンジン159に与えられ得、ロケーションエンジン159は、ワイヤレス信号に基づく位置推定値をSPS拡張デッドレコニングに基づく前の位置推定値に基づく位置推定値と組み合わせ得る。前の位置推定値も、前に判断されたワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニング位置であり得ることを理解されたい。同様に、上記で説明したように、ステップ402におけるワイヤレス信号測定ロケーションの推定位置は、前に判断されたワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニング位置に基づき得る。
【0033】
さらに、移動局は、ワイヤレストランシーバ135を介して、サーバ、たとえば、図2中のサーバ112にアクセスし、他の移動局がアクセスするために推定アクセスポイントロケーションをアップロードし得る。一実施形態では、アクセスポイントロケーションの信頼性推定値も与えられ、サーバは、他の移動局から取得されたアクセスポイントロケーションと信頼性推定値とを使用してアクセスポイントロケーション推定値を改善する。使用中に、移動局は、ロケーション、たとえば、建築物300に入るときにサーバ112にアクセスし、上記で説明したように、移動局がナビゲーションのために使用し得るアクセスポイントロケーションデータをサーバに問い合わせ得る。
【0034】
上記で説明したように、ワイヤレス信号ロケーションは、移動局において生成され、記憶されたものとは対照的に、外部データベースに記憶され得る。たとえば、移動局100はワイヤレス信号を受信し、RSSIまたはRTTなど、1つまたは複数のパラメータを測定し得、それがネットワーク110上の外部サーバ112に与えられる。サーバ112は、それに応答して、対応するワイヤレス信号に基づく位置推定値を、所望される場合、信頼性レベルとともに返し得る。サーバ112から返されたワイヤレス信号に基づく位置推定値(と信頼性レベル)は、たとえば、デッドレコニングに基づいて前に判断された位置推定値とともにロケーションエンジン159に与えられ得、上記で説明したように、異なる位置推定値からの信頼性レベルを使用して、融合された位置推定値が生成され得る。たとえば、位置推定値をそれらのそれぞれの信頼性レベルに基づいて重み付けすることによって、たとえば、より高い信頼性レベルにより大きい重みを与えること、たとえば、重み付き平均によって、融合された位置推定値を生成した後、位置推定値を組み合わせて、最終的な融合された位置推定値を取得し得る。位置推定値を更新するために、サーバ112は、たとえば、時間または動きに基づいて周期的にアクセスされ得る。
【0035】
図7は、移動局によって受信されたワイヤレス信号のパラメータに基づいて位置情報を移動局に与え得るサーバ112のブロック図である。図7に示すように、サーバ112はトランシーバ502に結合され、トランシーバ502はサーバ112をネットワーク110に接続する(図2)。トランシーバ502はワイヤレストランシーバとして示されているが、ワイヤードであり得ることを理解されたい。所望される場合、トランシーバはサーバ112の内部にあり得る。トランシーバ502は、サーバ制御510に接続され、サーバ制御510と通信する。サーバ制御510は、トランシーバ502からのデータを受け付けて処理し、デバイスの動作を制御する。サーバ制御510は、プロセッサ512および関連メモリ514と、ハードウェア516と、ソフトウェア518と、ファームウェア520とによって与えられ得る。サーバ112は、トランシーバ502から受信したデータを処理するロケーションエンジン522と、それに応答して送信されるべき位置を判断するためにメモリ514に記憶されたワイヤレスロケーションデータベースとをさらに含む。サーバ112はまた、たとえば、ディスプレイ532とキーパッド534とを含む、サーバ112と通信しているユーザインターフェース530を含み得、たとえば、サーバ制御510は、データを受け付け、ユーザインターフェース530を制御する。
【0036】
移動局におけるプロセッサ152の場合と同様に、本明細書で使用するプロセッサ512は、1つまたは複数のマイクロプロセッサ、組込みプロセッサ、コントローラ、特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)などを含むことができるが、必ずしも含む必要はないことを理解されよう。プロセッサという用語は、特定のハードウェアではなく、システムによって実装される機能を表すものとする。さらに、本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、またはサーバに関連する他のメモリを含むいずれかのタイプのコンピュータ記憶媒体を指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0037】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア516、ファームウェア520、ソフトウェア518、またはそれらの任意の組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0038】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいずれの機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ514に記憶され、プロセッサ512によって実行され得る。メモリは、プロセッサユニットの内部および/またはプロセッサユニットの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0039】
ファームウェアおよび/またはソフトウェアで実装する場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。例としては、データ構造で符号化されたコンピュータ可読媒体、およびコンピュータプログラムで符号化されたコンピュータ可読媒体がある。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フレキシブルディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0040】
コンピュータ可読媒体上での記憶に加えて、命令および/またはデータは、通信装置中に含まれる伝送媒体上の信号として与えられ得る。たとえば、通信装置は、命令とデータとを示す信号を有するトランシーバを含み得る。命令およびデータは、1つまたは複数のプロセッサに特許請求の範囲で概説する機能を実装させるように構成される。すなわち、通信装置は、開示した機能を実行するための情報を示す信号をもつ伝送媒体を含む。初めに、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第1の部分を含み得、次に、通信装置中に含まれる伝送媒体は、開示した機能を実行するための情報の第2の部分を含み得る。
【0041】
図8は、移動局によって受信されたワイヤレス信号を使用して移動局位置判断を支援するためのサーバデータベースを確立するフローチャートである。図8に示すように、サーバは、ワイヤレスフィンガープリント情報、測定ロケーションの位置推定値および位置推定値の信頼性レベルなどの移動局データを受信する(602)。データベースが確立されると、測定ロケーションの位置推定値および信頼性レベルはもはや必要とされないことがある。上記で説明したように、ワイヤレスフィンガープリント情報は、たとえば、3つ以上のアクセスポイントの、たとえば、移動局によって受信されたワイヤレス信号のRSSIおよび/またはRTTを含み得る。測定ロケーションの位置推定値は、SPS拡張デッドレコニングまたはワイヤレス信号に基づく位置推定値と融合されたSPS拡張デッドレコニングに基づき得る。移動局はまた、ワイヤレスロケーションを推定するとき、同じ移動局からの連続する測定値間の距離推定値を可能にするために、ワイヤレス信号測定値のタイムスタンプおよび移動局識別情報を与え得る。
【0042】
移動局においてバッテリー寿命および帯域幅を節約するために、移動局中の動きセンサ120が移動を示す場合、エリアがワイヤレス信号によってカバーされる場合、およびエリアがデータベース中にまだ正確に反映されていない場合、データベース構築の目的で、推定位置およびワイヤレスロケーションはサーバに与えられ得る。たとえば、移動局が、測定されたワイヤレス信号パラメータをサブミットした後、位置推定値を受信しないとき、エリアがデータベース中にまだ正確に反映されていないことは明白であり得る。さらに、移動局においてバッテリー寿命を節約するために、SPSシステムを使用せずに移動局における位置判断を行うことができ、それによって、使用する電力が減り、SPSシステムを使用して数分かかることがある、最初の位置フィックスを取得する際に、遅延をほとんどまたはまったく生じないように、本方法は、SPSとワイヤレス信号の両方のカバレージを有するエリアに拡張され得る。
【0043】
受信されたデータに基づいて、ワイヤレス信号アクセスポイントとワイヤレス信号の測定ロケーションの推定位置との間の距離を、チャネルモデルを使用して判断する(604)。距離推定は、複数の移動局からのデータが使用され得ることを除き、ブロック404(図6)において説明する推定と同様に実行され得る。一実施形態では、距離推定値は、高度の信頼性を有する移動局位置についてのみ作成される。より信頼できない距離推定値は、コスト関数に対するそれらの影響を減衰させることによる最小化の過程で考慮に入れられ得る。
【0044】
次いで、推定距離と測定ロケーションの推定位置とに基づいてワイヤレス信号アクセスポイントの位置を推定する(606)。さらに、次いで、推定距離と移動局位置とに基づいてワイヤレス信号フィンガープリントにおける位置を推定する(606)。アクセスポイントの推定位置および/またはフィンガープリントを(対応する信頼性レベルとともに)、たとえば、メモリ514中のデータベースに記憶する(608)。サーバは、移動局に位置情報を与える(610)。たとえば、データベースがアクセスポイントの推定位置を含んでいる場合、サーバは移動局から情報を受信したこと(602)に応答して、アクセスポイントの推定位置を与え得る。次いで、移動局は、アクセスポイントの位置の与えられた推定値(と対応する信頼性レベル)、ならびにチャネルモデルおよびワイヤレス信号の測定値を使用してワイヤレスベース位置推定値を判断し得、次いで、上記で説明したように、そのワイヤレスベース位置推定値がSPS拡張デッドレコニング位置推定値と融合され得る。代替または追加として、データベースは、ワイヤレス信号フィンガープリントと、ワイヤレスフィンガープリント内の異なるロケーションの対応するワイヤレスベース位置推定値および対応する信頼性推定値とを含み得る。サーバは、ワイヤレスベース位置推定値と信頼性レベルとを移動局に与え(610)、移動局は、ワイヤレスベース位置推定値をSPS拡張デッドレコニング位置推定値と融合させ得る。代替的に、サーバは、移動局によって与えられたSPS拡張デッドレコニング位置推定値(602)をワイヤレスベース位置推定値と融合させ得、融合された位置推定値を移動局に与える。
【0045】
アクセスポイントの位置を抑制している多数のフィンガープリント、たとえば、パイロット強度測定から導出されたアクセスポイントまでの距離、ならびにデッドレコニングから導出された、互いに対するフィンガープリントの相対位置により、アクセスポイントの推定位置は正確である。フィンガープリント自体に対応する位置推定値は、マルチパスによってある程度影響を及ぼされる。したがって、移動局のこれらの位置推定値は、アクセスポイントロケーション推定値と比較して雑音が多い。ただし、アクセスポイントが正確に配置される限り、フィンガープリントの位置推定値に、不正確なアクセスポイント位置によるバイアスは生じない。
【0046】
本発明は特定の実施形態に関して説明の目的で示されているが、本発明はそれに限定されない。本発明の範囲から逸脱することなく、様々な適応および改変を行い得る。したがって、添付の特許請求の範囲の趣旨および範囲は、上記の説明に限定されるべきではない。
【符号の説明】
【0047】
100 移動局
102 衛星ビークル
104 ワイヤレス通信アクセスポイント
106 セルラータワー
110 ネットワーク
112 サーバ
120 動きセンサ
122 加速度計
124 磁力計
130 カメラ
135 ワイヤレストランシーバ
140 SPS受信機
144 アンテナ
150 移動局制御
152 プロセッサ
153 クロック
154 メモリ
155 受信信号強度インジケータシステム(RSSI)
156 ハードウェア
157 ファームウェア
158 ソフトウェア
159 ロケーションエンジン
160 ユーザインターフェース
162 ディスプレイ
164 キーパッド
300 建築物
302 ワイヤレスアクセスポイント
303 ワイヤレス信号
304 ワイヤレスアクセスポイント
305 ワイヤレス信号
306 カバレージエリア
310 移動局が建築物中を移動する経路
310A 位置
310B 位置
310C 位置
310D 位置
310E 位置
312 ガラスドア
502 トランシーバ
510 サーバ制御
512 プロセッサ
514 メモリ
516 ハードウェア
518 ソフトウェア
520 ファームウェア
522 ロケーションエンジン
530 ユーザインターフェース
532 ディスプレイ
534 キーパッド
【特許請求の範囲】
【請求項1】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断するステップと、
複数のアクセスポイントからワイヤレス信号を受信するステップと、
前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するステップと、
前記デッドレコニング信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとに基づいて、前記移動局の前記推定位置を改善するステップと
を含む方法。
【請求項2】
前記移動局の前記推定位置を改善するステップが、
サーバにアクセスし、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つを与え、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するステップと、
前記デッドレコニング信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させるステップと
を含む、請求項1に記載の方法。
【請求項3】
サーバにアクセスし、前記推定位置およびデッドレコニング信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとを与えるステップをさらに含む、請求項1に記載の方法。
【請求項4】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップと、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するステップとをさらに含み、
前記移動局の前記推定位置を改善するステップが、前記デッドレコニング信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させるステップを含む、
請求項1に記載の方法。
【請求項5】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップが、サーバにアクセスし、前記ワイヤレス信号のためのアクセスポイントの前記推定位置を前記サーバから受信するステップを含む、請求項1に記載の方法。
【請求項6】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップが、
複数の測定ロケーションにおいて前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するステップであって、前記複数の測定ロケーションの推定位置が衛星測位システム拡張デッドレコニングに基づいて判断される、判断するステップと、
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップと、
前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するステップと
を含む、請求項4に記載の方法。
【請求項7】
前記複数の測定ロケーションの推定位置が、ワイヤレス信号に基づく位置推定値と融合された衛星測位システム拡張デッドレコニングに基づいて判断され、前記移動局の前記推定位置が、融合されたワイヤレス信号に基づく位置推定値と衛星測位システム拡張デッドレコニングベース位置推定値とを含む、請求項6に記載の方法。
【請求項8】
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップが、前記ワイヤレス信号の受信信号強度インジケータに基づいて往復時間および経路損失のうちの少なくとも1つを測定するステップと、距離を推定するために前記測定された往復時間または経路損失を使用するステップとを含む、請求項6に記載の方法。
【請求項9】
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップが、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を、衛星測位システム拡張デッドレコニングに基づいて判断された前記対応する測定ロケーションの推定位置の変化と比較するステップと、距離を推定するために使用される前記チャネルモデルを変更するために前記比較を使用するステップとをさらに含む、請求項8に記載の方法。
【請求項10】
前記複数の測定ロケーションの前記推定位置に対応するデッドレコニング信頼性レベルを与えるステップをさらに含み、前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するステップが、前記複数の測定ロケーションの前記推定位置に対応する前記デッドレコニング信頼性レベルを使用する、請求項6に記載の方法。
【請求項11】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を記憶するステップをさらに含む、請求項6に記載の方法。
【請求項12】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をサーバにアップロードするステップをさらに含む、請求項6に記載の方法。
【請求項13】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置の信頼性レベルを判断するステップと、前記信頼性レベルを前記アクセスポイントの前記推定位置とともに前記サーバにアップロードするステップとをさらに含む、請求項12に記載の方法。
【請求項14】
前記ワイヤレス信号が、WLAN、UMTS、LTE、GSMおよびBluetoothのうちの1つである、請求項1に記載の方法。
【請求項15】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断するステップが、磁力計および加速度計からのデータを使用するステップを含む、請求項1に記載の方法。
【請求項16】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断することが、ジャイロスコープ、圧力センサ、カメラ、走行距離計、およびホイールチックセンサのうちの少なくとも1つからのデータを使用するステップを含む、請求項1に記載の方法。
【請求項17】
測位データを与える衛星測位システム受信機と、
デッドレコニングデータを与える少なくとも1つのセンサと、
ワイヤレス信号を受信および送信するワイヤレストランシーバと、
測位データを受信する前記衛星測位システム受信機と、デッドレコニングデータを受信する前記少なくとも1つのセンサと、前記ワイヤレストランシーバとに接続されたプロセッサと、
前記プロセッサに接続されたメモリと、
前記メモリ中に保持され、前記測位データと前記デッドレコニングデータとに基づいて、推定位置と、対応する信頼性レベルとを判断するために前記プロセッサにおいて実行されるソフトウェアであって、前記ソフトウェアが、前記ワイヤレストランシーバによって受信されたワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断することと、前記信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとを使用して前記推定位置を改善することとを行うように、前記プロセッサをさらに制御する、ソフトウェアと
を含む移動局。
【請求項18】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに送信し、代わりに、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するように、前記ワイヤレストランシーバを制御させ、前記推定位置に対応する前記信頼性レベルと前記ワイヤレス信頼性レベルとに基づいて前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させる、請求項17に記載の移動局。
【請求項19】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記推定位置および対応する信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとをサーバに送信するように前記ワイヤレストランシーバを制御させる、請求項17に記載の移動局。
【請求項20】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに前記ワイヤレス信号のためのアクセスポイントの推定位置を取得させ、前記ソフトウェアが、前記アクセスポイントの推定位置と受信ワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するように前記プロセッサをさらに制御し、前記プロセッサに前記移動局の前記推定位置を改善させる前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信頼性レベルと前記推定位置に対応する前記信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させる、請求項17に記載の移動局。
【請求項21】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号のためのアクセスポイントの前記推定位置を受信するように前記ワイヤレストランシーバを制御させる、請求項20に記載の移動局。
【請求項22】
前記メモリ中に保持され、前記プロセッサに前記ワイヤレス信号のためのアクセスポイントの前記推定位置を取得させるために前記プロセッサにおいて実行される前記ソフトウェアが、前記メモリ中に保持され、前記プロセッサに、複数の測定ロケーションにおいてワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断させ、測位データとデッドレコニングデータとに基づいて前記複数の測定ロケーションの推定位置を判断させるために前記プロセッサにおいて実行されるソフトウェアを含み、前記ソフトウェアが、チャネルモデルを使用して前記ワイヤレス信号のための複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定することと、前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記複数のアクセスポイントの前記推定位置を判断することとを行うように前記プロセッサをさらに制御する、請求項20に記載の移動局。
【請求項23】
前記プロセッサに前記複数の測定ロケーションの推定位置を判断させる前記ソフトウェアが、前記プロセッサに、測位データと、デッドレコニングデータと、ワイヤレス信号に基づく位置推定値とを使用させ、前記移動局の前記推定位置が、融合されたワイヤレス信号に基づく位置推定値と、衛星測位システム拡張デッドレコニングベース位置推定値とを含む、請求項22に記載の移動局。
【請求項24】
前記プロセッサに、チャネルモデルを使用して前記ワイヤレス信号のための複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定させる前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号の受信信号強度インジケータに基づいて往復時間および経路損失のうちの少なくとも1つを測定させ、距離を推定するために前記測定された往復時間または経路損失を使用させる、請求項22に記載の移動局。
【請求項25】
前記プロセッサに、チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定させる前記ソフトウェアが、前記プロセッサに、前記測定された往復時間または経路損失のうちの少なくとも1つの変化を、衛星測位システム拡張デッドレコニングに基づいて判断された前記対応する測定ロケーションの推定位置の変化と比較させ、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更させる、請求項24に記載の移動局。
【請求項26】
前記ソフトウェアが、前記プロセッサに、前記複数の測定ロケーションの前記推定位置に対応する信頼性レベルを判断させ、前記プロセッサに、前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記複数のアクセスポイントの前記位置を推定させる前記ソフトウェアが、前記プロセッサに、前記複数の測定ロケーションの前記推定位置に対応する前記判断された信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けさせる、請求項22に記載の移動局。
【請求項27】
前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶させる、請求項22に記載の移動局。
【請求項28】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をサーバにアップロードするように前記ワイヤレストランシーバを制御させるソフトウェアをさらに含む、請求項22に記載の移動局。
【請求項29】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置に対応する信頼性レベルを判断させ、前記アクセスポイントの前記推定位置に対応する前記信頼性レベルを前記サーバにアップロードするように前記ワイヤレストランシーバを制御させるソフトウェアをさらに含む、請求項28に記載の移動局。
【請求項30】
衛星測位システム拡張デッドレコニングを使用して、移動局の推定位置と、対応する信頼性レベルとを判断するための手段と、
ワイヤレス信号を受信するための手段と、
前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するための手段と、
前記信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとに基づいて、前記移動局の前記推定位置を改善するための手段と
を含む移動局。
【請求項31】
前記移動局の前記推定位置を改善するための前記手段が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに与えるための手段と、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するための手段と、前記ワイヤレス信頼性レベルと前記判断された推定位置に対応する前記信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させるための手段とを含む、請求項30に記載の移動局。
【請求項32】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するための手段と、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するための手段とをさらに含み、
前記移動局の前記推定位置を改善するための前記手段が、前記ワイヤレス信頼性レベルと前記位置推定値に対応する前記信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させるための手段を含む、
請求項30に記載の移動局。
【請求項33】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するための前記手段が、
複数の測定ロケーションにおいて前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するための手段であって、前記複数の測定ロケーションの推定位置が衛星測位システム拡張デッドレコニングに基づいて判断される、判断するための手段と、
前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するための手段と、
前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するための手段と
を含む、請求項32に記載の移動局。
【請求項34】
コンピュータにより実行可能なプログラムコードを記録したコンピュータ可読記録媒体であって、
衛星測位システム拡張デッドレコニングに基づいて、位置と、対応する信頼性レベルとを推定するためのプログラムコードと、
ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するためのプログラムコードと、
前記信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとを使用して前記位置の前記推定値を改善するためのプログラムコードと
を含むコンピュータ可読記録媒体。
【請求項35】
前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに送信するようにワイヤレストランシーバを制御するためのプログラムコードと、前記位置の前記推定値に対応する前記信頼性レベルと前記サーバから受信された前記ワイヤレス信号に基づく位置推定値に対応する信頼性レベルとを使用して、前記サーバから受信されたワイヤレス信号に基づく位置推定値を前記位置の前記推定値と融合させるためのプログラムコードとをさらに含む、請求項34に記載のコンピュータ可読記録媒体。
【請求項36】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するためのプログラムコードと、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するためのプログラムコードとをさらに含み、
位置の前記推定値を改善するための前記プログラムコードが、前記位置の前記推定値に対応する前記信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値を前記位置の前記推定値と融合させるためのプログラムコードを含む、
請求項34に記載のコンピュータ可読記録媒体。
【請求項37】
前記ワイヤレス信号のための前記アクセスポイントの推定位置を取得するためのプログラムコードが、
複数の測定ロケーションにおいてワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するためのプログラムコードと、
衛星測位システム拡張デッドレコニングに基づいて前記複数の測定ロケーションの推定位置を判断するためのプログラムコードと、
前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するためのプログラムコードと
を含む、請求項36に記載のコンピュータ可読記録媒体。
【請求項38】
少なくとも1つの移動局からワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置とを受信するステップと、
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記推定位置との間の距離を推定するステップと、
前記推定距離と前記測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するステップと、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をデータベースに記憶するステップと
を含む方法。
【請求項39】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるステップをさらに含む、請求項38に記載の方法。
【請求項40】
移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、前記移動局のワイヤレスベース位置推定値を与えるステップをさらに含む、請求項38に記載の方法。
【請求項41】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項38に記載の方法。
【請求項42】
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するステップが、測定された受信信号強度インジケータに基づいて判断された、前記測定された往復時間および前記経路損失のうちの少なくとも1つを使用するステップを含む、請求項38に記載の方法。
【請求項43】
チャネルモデルを使用して前記ワイヤレス信号のための前記アクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するステップが、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を前記対応する測定ロケーションの推定位置の変化と比較し、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更するステップとをさらに含む、請求項42に記載の方法。
【請求項44】
前記測定ロケーションの前記推定位置に関連する信頼性レベルが前記少なくとも1つの移動局から受信され、前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するステップが、前記信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けするステップを含む、請求項38に記載の方法。
【請求項45】
少なくとも1つの移動局からワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置とを受信するための手段と、
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための手段と、
前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するための手段と、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をデータベースに記憶するための手段と
を含むシステム。
【請求項46】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるための手段をさらに含む、請求項45に記載のシステム。
【請求項47】
前記移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、移動局のワイヤレスベース位置推定値を与えるための手段をさらに含む、請求項45に記載のシステム。
【請求項48】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項45に記載のシステム。
【請求項49】
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための前記手段が、測定された受信信号強度インジケータに基づいて判断された、前記測定された往復時間および前記経路損失を使用するための手段を含む、請求項45に記載のシステム。
【請求項50】
チャネルモデルを使用して前記ワイヤレス信号のための前記アクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための前記手段が、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を前記対応する測定ロケーションの推定位置の変化と比較し、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更するための手段を含む、請求項49に記載のシステム。
【請求項51】
前記測定ロケーションの前記推定位置に関連する信頼性レベルが前記少なくとも1つの移動局から受信され、前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するための手段が、前記信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けするための手段を含む、請求項45に記載のシステム。
【請求項52】
ワイヤレス信号を受信および送信するワイヤレストランシーバであって、前記ワイヤレストランシーバが、少なくとも1つの移動局から、ワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置受信する、ワイヤレストランシーバと、
前記ワイヤレストランシーバに接続されたプロセッサと、
前記プロセッサに接続されたメモリと、
前記メモリ中に保持され、前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定し、前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定し、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶するために前記プロセッサにおいて実行されるソフトウェアと
を含む装置。
【請求項53】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるように前記ワイヤレストランシーバを制御させるためのソフトウェアをさらに含む、請求項52に記載の装置。
【請求項54】
前記プロセッサに、移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、前記移動局のワイヤレスベース位置推定値を与えるように前記ワイヤレストランシーバを制御させるためのソフトウェアをさらに含む、請求項52に記載の装置。
【請求項55】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項52に記載の装置。
【請求項56】
コンピュータにより実行可能なプログラムコードを記録したコンピュータ可読記録媒体であって、
ワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値に関連する前記測定ロケーションの推定位置とに基づいて、ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するためのプログラムコードと、
前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するためのプログラムコードと、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶するためのプログラムコードと
を含むコンピュータ可読記録媒体。
【請求項57】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に送信するためのプログラムコードをさらに含む、請求項56に記載のコンピュータ可読記録媒体。
【請求項58】
前記ワイヤレス信号の測定値に応答してワイヤレス信号に基づく位置推定値を判断し、前記ワイヤレス信号に基づく位置推定値を送信するためのプログラムコードをさらに含む、請求項56に記載のコンピュータ可読記録媒体。
【請求項1】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断するステップと、
複数のアクセスポイントからワイヤレス信号を受信するステップと、
前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するステップと、
前記デッドレコニング信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとに基づいて、前記移動局の前記推定位置を改善するステップと
を含む方法。
【請求項2】
前記移動局の前記推定位置を改善するステップが、
サーバにアクセスし、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つを与え、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するステップと、
前記デッドレコニング信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させるステップと
を含む、請求項1に記載の方法。
【請求項3】
サーバにアクセスし、前記推定位置およびデッドレコニング信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとを与えるステップをさらに含む、請求項1に記載の方法。
【請求項4】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップと、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するステップとをさらに含み、
前記移動局の前記推定位置を改善するステップが、前記デッドレコニング信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させるステップを含む、
請求項1に記載の方法。
【請求項5】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップが、サーバにアクセスし、前記ワイヤレス信号のためのアクセスポイントの前記推定位置を前記サーバから受信するステップを含む、請求項1に記載の方法。
【請求項6】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するステップが、
複数の測定ロケーションにおいて前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するステップであって、前記複数の測定ロケーションの推定位置が衛星測位システム拡張デッドレコニングに基づいて判断される、判断するステップと、
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップと、
前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するステップと
を含む、請求項4に記載の方法。
【請求項7】
前記複数の測定ロケーションの推定位置が、ワイヤレス信号に基づく位置推定値と融合された衛星測位システム拡張デッドレコニングに基づいて判断され、前記移動局の前記推定位置が、融合されたワイヤレス信号に基づく位置推定値と衛星測位システム拡張デッドレコニングベース位置推定値とを含む、請求項6に記載の方法。
【請求項8】
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップが、前記ワイヤレス信号の受信信号強度インジケータに基づいて往復時間および経路損失のうちの少なくとも1つを測定するステップと、距離を推定するために前記測定された往復時間または経路損失を使用するステップとを含む、請求項6に記載の方法。
【請求項9】
チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するステップが、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を、衛星測位システム拡張デッドレコニングに基づいて判断された前記対応する測定ロケーションの推定位置の変化と比較するステップと、距離を推定するために使用される前記チャネルモデルを変更するために前記比較を使用するステップとをさらに含む、請求項8に記載の方法。
【請求項10】
前記複数の測定ロケーションの前記推定位置に対応するデッドレコニング信頼性レベルを与えるステップをさらに含み、前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するステップが、前記複数の測定ロケーションの前記推定位置に対応する前記デッドレコニング信頼性レベルを使用する、請求項6に記載の方法。
【請求項11】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を記憶するステップをさらに含む、請求項6に記載の方法。
【請求項12】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をサーバにアップロードするステップをさらに含む、請求項6に記載の方法。
【請求項13】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置の信頼性レベルを判断するステップと、前記信頼性レベルを前記アクセスポイントの前記推定位置とともに前記サーバにアップロードするステップとをさらに含む、請求項12に記載の方法。
【請求項14】
前記ワイヤレス信号が、WLAN、UMTS、LTE、GSMおよびBluetoothのうちの1つである、請求項1に記載の方法。
【請求項15】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断するステップが、磁力計および加速度計からのデータを使用するステップを含む、請求項1に記載の方法。
【請求項16】
衛星測位システム拡張デッドレコニングを用いて、移動局の推定位置と、対応するデッドレコニング信頼性レベルとを判断することが、ジャイロスコープ、圧力センサ、カメラ、走行距離計、およびホイールチックセンサのうちの少なくとも1つからのデータを使用するステップを含む、請求項1に記載の方法。
【請求項17】
測位データを与える衛星測位システム受信機と、
デッドレコニングデータを与える少なくとも1つのセンサと、
ワイヤレス信号を受信および送信するワイヤレストランシーバと、
測位データを受信する前記衛星測位システム受信機と、デッドレコニングデータを受信する前記少なくとも1つのセンサと、前記ワイヤレストランシーバとに接続されたプロセッサと、
前記プロセッサに接続されたメモリと、
前記メモリ中に保持され、前記測位データと前記デッドレコニングデータとに基づいて、推定位置と、対応する信頼性レベルとを判断するために前記プロセッサにおいて実行されるソフトウェアであって、前記ソフトウェアが、前記ワイヤレストランシーバによって受信されたワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断することと、前記信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとを使用して前記推定位置を改善することとを行うように、前記プロセッサをさらに制御する、ソフトウェアと
を含む移動局。
【請求項18】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに送信し、代わりに、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するように、前記ワイヤレストランシーバを制御させ、前記推定位置に対応する前記信頼性レベルと前記ワイヤレス信頼性レベルとに基づいて前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させる、請求項17に記載の移動局。
【請求項19】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記推定位置および対応する信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとをサーバに送信するように前記ワイヤレストランシーバを制御させる、請求項17に記載の移動局。
【請求項20】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに前記ワイヤレス信号のためのアクセスポイントの推定位置を取得させ、前記ソフトウェアが、前記アクセスポイントの推定位置と受信ワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するように前記プロセッサをさらに制御し、前記プロセッサに前記移動局の前記推定位置を改善させる前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信頼性レベルと前記推定位置に対応する前記信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させる、請求項17に記載の移動局。
【請求項21】
前記メモリ中に保持され、前記プロセッサにおいて実行される前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号のためのアクセスポイントの前記推定位置を受信するように前記ワイヤレストランシーバを制御させる、請求項20に記載の移動局。
【請求項22】
前記メモリ中に保持され、前記プロセッサに前記ワイヤレス信号のためのアクセスポイントの前記推定位置を取得させるために前記プロセッサにおいて実行される前記ソフトウェアが、前記メモリ中に保持され、前記プロセッサに、複数の測定ロケーションにおいてワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断させ、測位データとデッドレコニングデータとに基づいて前記複数の測定ロケーションの推定位置を判断させるために前記プロセッサにおいて実行されるソフトウェアを含み、前記ソフトウェアが、チャネルモデルを使用して前記ワイヤレス信号のための複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定することと、前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記複数のアクセスポイントの前記推定位置を判断することとを行うように前記プロセッサをさらに制御する、請求項20に記載の移動局。
【請求項23】
前記プロセッサに前記複数の測定ロケーションの推定位置を判断させる前記ソフトウェアが、前記プロセッサに、測位データと、デッドレコニングデータと、ワイヤレス信号に基づく位置推定値とを使用させ、前記移動局の前記推定位置が、融合されたワイヤレス信号に基づく位置推定値と、衛星測位システム拡張デッドレコニングベース位置推定値とを含む、請求項22に記載の移動局。
【請求項24】
前記プロセッサに、チャネルモデルを使用して前記ワイヤレス信号のための複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定させる前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号の受信信号強度インジケータに基づいて往復時間および経路損失のうちの少なくとも1つを測定させ、距離を推定するために前記測定された往復時間または経路損失を使用させる、請求項22に記載の移動局。
【請求項25】
前記プロセッサに、チャネルモデルを使用して前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定させる前記ソフトウェアが、前記プロセッサに、前記測定された往復時間または経路損失のうちの少なくとも1つの変化を、衛星測位システム拡張デッドレコニングに基づいて判断された前記対応する測定ロケーションの推定位置の変化と比較させ、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更させる、請求項24に記載の移動局。
【請求項26】
前記ソフトウェアが、前記プロセッサに、前記複数の測定ロケーションの前記推定位置に対応する信頼性レベルを判断させ、前記プロセッサに、前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記複数のアクセスポイントの前記位置を推定させる前記ソフトウェアが、前記プロセッサに、前記複数の測定ロケーションの前記推定位置に対応する前記判断された信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けさせる、請求項22に記載の移動局。
【請求項27】
前記ソフトウェアが、前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶させる、請求項22に記載の移動局。
【請求項28】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をサーバにアップロードするように前記ワイヤレストランシーバを制御させるソフトウェアをさらに含む、請求項22に記載の移動局。
【請求項29】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置に対応する信頼性レベルを判断させ、前記アクセスポイントの前記推定位置に対応する前記信頼性レベルを前記サーバにアップロードするように前記ワイヤレストランシーバを制御させるソフトウェアをさらに含む、請求項28に記載の移動局。
【請求項30】
衛星測位システム拡張デッドレコニングを使用して、移動局の推定位置と、対応する信頼性レベルとを判断するための手段と、
ワイヤレス信号を受信するための手段と、
前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するための手段と、
前記信頼性レベルと、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの前記少なくとも1つとに基づいて、前記移動局の前記推定位置を改善するための手段と
を含む移動局。
【請求項31】
前記移動局の前記推定位置を改善するための前記手段が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに与えるための手段と、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを前記サーバから受信するための手段と、前記ワイヤレス信頼性レベルと前記判断された推定位置に対応する前記信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値と前記判断された推定位置とを融合させるための手段とを含む、請求項30に記載の移動局。
【請求項32】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するための手段と、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、前記移動局のワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するための手段とをさらに含み、
前記移動局の前記推定位置を改善するための前記手段が、前記ワイヤレス信頼性レベルと前記位置推定値に対応する前記信頼性レベルとを使用して前記移動局の前記推定位置を前記ワイヤレス信号に基づく位置推定値と融合させるための手段を含む、
請求項30に記載の移動局。
【請求項33】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するための前記手段が、
複数の測定ロケーションにおいて前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するための手段であって、前記複数の測定ロケーションの推定位置が衛星測位システム拡張デッドレコニングに基づいて判断される、判断するための手段と、
前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するための手段と、
前記推定距離と前記複数の測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するための手段と
を含む、請求項32に記載の移動局。
【請求項34】
コンピュータにより実行可能なプログラムコードを記録したコンピュータ可読記録媒体であって、
衛星測位システム拡張デッドレコニングに基づいて、位置と、対応する信頼性レベルとを推定するためのプログラムコードと、
ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するためのプログラムコードと、
前記信頼性レベルと前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つとを使用して前記位置の前記推定値を改善するためのプログラムコードと
を含むコンピュータ可読記録媒体。
【請求項35】
前記受信信号強度インジケータおよび往復時間のうちの少なくとも1つをサーバに送信するようにワイヤレストランシーバを制御するためのプログラムコードと、前記位置の前記推定値に対応する前記信頼性レベルと前記サーバから受信された前記ワイヤレス信号に基づく位置推定値に対応する信頼性レベルとを使用して、前記サーバから受信されたワイヤレス信号に基づく位置推定値を前記位置の前記推定値と融合させるためのプログラムコードとをさらに含む、請求項34に記載のコンピュータ可読記録媒体。
【請求項36】
前記ワイヤレス信号のためのアクセスポイントの推定位置を取得するためのプログラムコードと、
前記アクセスポイントの前記推定位置と受信されたワイヤレス信号とに基づいて、ワイヤレス信号に基づく位置推定値と、対応するワイヤレス信頼性レベルとを判断するためのプログラムコードとをさらに含み、
位置の前記推定値を改善するための前記プログラムコードが、前記位置の前記推定値に対応する前記信頼性レベルと前記ワイヤレス信頼性レベルとを使用して前記ワイヤレス信号に基づく位置推定値を前記位置の前記推定値と融合させるためのプログラムコードを含む、
請求項34に記載のコンピュータ可読記録媒体。
【請求項37】
前記ワイヤレス信号のための前記アクセスポイントの推定位置を取得するためのプログラムコードが、
複数の測定ロケーションにおいてワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを判断するためのプログラムコードと、
衛星測位システム拡張デッドレコニングに基づいて前記複数の測定ロケーションの推定位置を判断するためのプログラムコードと、
前記ワイヤレス信号のための前記複数のアクセスポイントと前記複数の測定ロケーションの前記推定位置との間の距離を推定するためのプログラムコードと
を含む、請求項36に記載のコンピュータ可読記録媒体。
【請求項38】
少なくとも1つの移動局からワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置とを受信するステップと、
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記推定位置との間の距離を推定するステップと、
前記推定距離と前記測定ロケーションの前記推定位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの位置を推定するステップと、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をデータベースに記憶するステップと
を含む方法。
【請求項39】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるステップをさらに含む、請求項38に記載の方法。
【請求項40】
移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、前記移動局のワイヤレスベース位置推定値を与えるステップをさらに含む、請求項38に記載の方法。
【請求項41】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項38に記載の方法。
【請求項42】
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するステップが、測定された受信信号強度インジケータに基づいて判断された、前記測定された往復時間および前記経路損失のうちの少なくとも1つを使用するステップを含む、請求項38に記載の方法。
【請求項43】
チャネルモデルを使用して前記ワイヤレス信号のための前記アクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するステップが、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を前記対応する測定ロケーションの推定位置の変化と比較し、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更するステップとをさらに含む、請求項42に記載の方法。
【請求項44】
前記測定ロケーションの前記推定位置に関連する信頼性レベルが前記少なくとも1つの移動局から受信され、前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するステップが、前記信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けするステップを含む、請求項38に記載の方法。
【請求項45】
少なくとも1つの移動局からワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置とを受信するための手段と、
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための手段と、
前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するための手段と、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置をデータベースに記憶するための手段と
を含むシステム。
【請求項46】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるための手段をさらに含む、請求項45に記載のシステム。
【請求項47】
前記移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、移動局のワイヤレスベース位置推定値を与えるための手段をさらに含む、請求項45に記載のシステム。
【請求項48】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項45に記載のシステム。
【請求項49】
チャネルモデルを使用して前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための前記手段が、測定された受信信号強度インジケータに基づいて判断された、前記測定された往復時間および前記経路損失を使用するための手段を含む、請求項45に記載のシステム。
【請求項50】
チャネルモデルを使用して前記ワイヤレス信号のための前記アクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するための前記手段が、前記測定された往復時間および経路損失のうちの少なくとも1つの変化を前記対応する測定ロケーションの推定位置の変化と比較し、前記比較を使用して、距離を推定するために使用される前記チャネルモデルを変更するための手段を含む、請求項49に記載のシステム。
【請求項51】
前記測定ロケーションの前記推定位置に関連する信頼性レベルが前記少なくとも1つの移動局から受信され、前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するための手段が、前記信頼性レベルに基づいて前記アクセスポイントの前記位置の前記計算を重み付けするための手段を含む、請求項45に記載のシステム。
【請求項52】
ワイヤレス信号を受信および送信するワイヤレストランシーバであって、前記ワイヤレストランシーバが、少なくとも1つの移動局から、ワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値の前記測定ロケーションの推定位置受信する、ワイヤレストランシーバと、
前記ワイヤレストランシーバに接続されたプロセッサと、
前記プロセッサに接続されたメモリと、
前記メモリ中に保持され、前記ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定し、前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定し、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶するために前記プロセッサにおいて実行されるソフトウェアと
を含む装置。
【請求項53】
前記プロセッサに、前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に与えるように前記ワイヤレストランシーバを制御させるためのソフトウェアをさらに含む、請求項52に記載の装置。
【請求項54】
前記プロセッサに、移動局からの前記ワイヤレス信号の測定値を受信したことに応答して、前記移動局のワイヤレスベース位置推定値を与えるように前記ワイヤレストランシーバを制御させるためのソフトウェアをさらに含む、請求項52に記載の装置。
【請求項55】
ワイヤレス信号の前記測定値が、前記ワイヤレス信号の受信信号強度インジケータおよび往復時間のうちの少なくとも1つを含む、請求項52に記載の装置。
【請求項56】
コンピュータにより実行可能なプログラムコードを記録したコンピュータ可読記録媒体であって、
ワイヤレス信号の測定値と前記ワイヤレス信号の前記測定値に関連する前記測定ロケーションの推定位置とに基づいて、ワイヤレス信号のためのアクセスポイントと前記測定ロケーションの前記位置との間の距離を推定するためのプログラムコードと、
前記推定距離と前記測定ロケーションの前記位置とに基づいて前記ワイヤレス信号のための前記アクセスポイントの前記位置を推定するためのプログラムコードと、
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を前記メモリに記憶するためのプログラムコードと
を含むコンピュータ可読記録媒体。
【請求項57】
前記ワイヤレス信号のための前記アクセスポイントの前記推定位置を移動局に送信するためのプログラムコードをさらに含む、請求項56に記載のコンピュータ可読記録媒体。
【請求項58】
前記ワイヤレス信号の測定値に応答してワイヤレス信号に基づく位置推定値を判断し、前記ワイヤレス信号に基づく位置推定値を送信するためのプログラムコードをさらに含む、請求項56に記載のコンピュータ可読記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2013−511727(P2013−511727A)
【公表日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2012−540062(P2012−540062)
【出願日】平成22年11月18日(2010.11.18)
【国際出願番号】PCT/US2010/057284
【国際公開番号】WO2011/063153
【国際公開日】平成23年5月26日(2011.5.26)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
【公表日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成22年11月18日(2010.11.18)
【国際出願番号】PCT/US2010/057284
【国際公開番号】WO2011/063153
【国際公開日】平成23年5月26日(2011.5.26)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
[ Back to top ]