
ワイヤレス充電器、異物検出方法

【課題】ワイヤレス充電器上の小さな異物を検出してその異物の発熱を防止する。
【解決手段】誘導起電力により被充電機器を充電するワイヤレス充電器であって、被充電機器内の二次コイルに誘導電流を送信する一次コイルと、二次コイルの位置を検出する位置検出部と、一次、二次コイルの軸心が一致する位置(初期位置)に一次コイルの位置を調整する初期位置調整部と、一次コイルを、初期位置を基準として一次コイルの軸心と垂直な平面内の2以上の測定方向毎に初期位置から所定の間隔ずつ離れた測定位置に順次移動するコイル制御手段と、測定位置毎に被充電機器の充電効率を測定する効率測定手段と、何れかの測定方向における何れかの測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が所定の閾値以上となる場合には充電停止命令を送信する判定手段とを備える。
【解決手段】誘導起電力により被充電機器を充電するワイヤレス充電器であって、被充電機器内の二次コイルに誘導電流を送信する一次コイルと、二次コイルの位置を検出する位置検出部と、一次、二次コイルの軸心が一致する位置(初期位置)に一次コイルの位置を調整する初期位置調整部と、一次コイルを、初期位置を基準として一次コイルの軸心と垂直な平面内の2以上の測定方向毎に初期位置から所定の間隔ずつ離れた測定位置に順次移動するコイル制御手段と、測定位置毎に被充電機器の充電効率を測定する効率測定手段と、何れかの測定方向における何れかの測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が所定の閾値以上となる場合には充電停止命令を送信する判定手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はワイヤレス充電器上に存在する異物を検出するワイヤレス充電器、異物検出方法に関する。
【背景技術】
【0002】
近年、ワイヤレス充電の国際標準仕様(非特許文献1)が策定され、本仕様において電磁誘導方式での非接触充電時の充電器と被充電機器(電池パック、携帯電話、カメラ、ゲーム機、その他の小型のポータブルデバイス)間での充電開始前の認証や充電時の電力制御方法、充電器と被充電機器間の通信、及び充電器や被充電機器のデザイン等が規定されている。ワイヤレス充電器は本仕様に基づき商品化される。電磁誘導方式でワイヤレス充電を行う場合、充電器のコイル(以下、一次コイルという)と被充電機器のコイル(以下、二次コイルという)の位置を合わせ、効率良く充電する必要がある。一次コイルと二次コイルの位置合わせ方法については例えば以下のような方法がある(非特許文献2)。
【0003】
<ムービングコイル方式>
充電器に内蔵された検出コイルによって、二次コイルのおおよその位置を検出し、その位置に充電器のムービングコイル(一次コイル)を移動させ、電力伝送を開始する。電力伝送を開始した後効率が最大となる最適な位置になるようにムービングコイルの微調整を行う。
【0004】
<コイルアレイ方式>
複数の一次コイルを積層構造として充電器内に隙間なく面状配置し、二次コイルが置かれた位置の最近傍に配置された一次コイルのみをアクティブ状態とすることにより、電力伝送を可能とする。充電器側の電源回路の拡張により、複数の充電機器を同時に充電することが可能となる。
【0005】
<位置合わせガイド方式>
一次コイルの位置に位置合わせを行うためのガイド表示があり、ユーザ自身が被充電機器の位置合わせを行う。一次コイルの中心に磁石を配置することにより、二次コイルが近付いた場合に、磁力で被充電機器を引きよせ、位置合わせをガイドする。
【0006】
ワイヤレス充電器による充電方式の場合、充電器と被充電機器との間に金属異物(例えばピン、クリップなど)が挟まった状態のまま充電動作が継続した場合、挟まった金属異物が発熱して非常に高温になることがあり、ユーザが非常に不安全となる恐れがあった。これに対し、特許文献1の非接触充電器では、二次電池の充電電流と充電電圧から充電電力値を測定し、電力送信部に送り、電力送信部は電力送信部が送った電力値と充電電力値を比較し、比較した値が所定値以内であれば充電を継続し、所定外であれば、金属などの異物挿入ありと判断し、充電を停止する。このように、特許文献1の非接触充電器によれば、充電中に小さな金属を部分的に送信部と受電部の間に挿入した場合でも、異常検出ができ、安全性を高めることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−83094号公報
【非特許文献】
【0008】
【非特許文献1】System Description Wireless Power Transfer Volume I:Low Power Part1:Interface Definition Version 1.0.1.[online].Retrieved from the Internet:<URL: http://www.rrc-wireless-power.de/fileadmin/website_wireless_power/Dokumente/News/WirelessPowerSpecificationPart1.pdf>
【非特許文献2】金井孝之、金井康通、野村直児、「置くだけで充電可能なWPC方式ワイヤレス充電ケータイ」NTTDOCOMOテクニカル・ジャーナル、社団法人電気通信協会、平成23年1月、vol.18、No.4、P.58−60
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の非接触充電器では、明らかに大きな異物が挿入された場合には、効率が明確に低下するため、これを検知することができるが、ある程度以下の大きさの異物になると効率の低下を正しく検知できなかった。小さな異物であっても金属である場合に、前述同様、異物が発熱してユーザが不安全になる恐れがあった。そこで、本発明では、ワイヤレス充電器上の小さな異物を検出してその異物の発熱を防止することができるワイヤレス充電器、異物検出方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明のワイヤレス充電器は、相互誘導による誘導起電力によって、被充電機器のバッテリを充電することを特徴とし、一次コイルと、位置検出部と、初期位置調整部と、充電電力制御部と、異物検出部とを備える。異物検出部は、コイル制御手段と、効率測定手段と、判定手段とを備える。
【0011】
一次コイルは、被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、二次コイルに誘導電流を送信する。位置検出部は、二次コイルの位置を検出する。初期位置調整部は、一次コイルの軸心と、二次コイルの軸心とが一致する位置(以下、初期位置という)に一次コイルの位置を調整する。充電電力制御部は、一次コイルへの送電を制御し、充電停止命令を検知した場合に一次コイルへの送電を停止する。コイル制御手段は、一次コイルを、初期位置を基準として一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動する。効率測定手段は、測定位置毎に被充電機器の充電効率を測定する。判定手段は、何れかの測定方向における初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電電力制御部に充電停止命令を送信する。
【発明の効果】
【0012】
本発明のワイヤレス充電器によれば、ワイヤレス充電器上の小さな異物を検出して、その異物の発熱を防止することができる
【図面の簡単な説明】
【0013】
【図1】本発明のワイヤレス充電器が備える初期位置調整部の動作を説明する図。
【図2】本発明のワイヤレス充電器が備えるコイル制御手段の動作例1を示す図。
【図3】動作例1でコイルを動作させた場合の各測定位置での充電効率の例を示す図。
【図4】本発明のワイヤレス充電器が備えるコイル制御手段の動作例2を示す図。
【図5】動作例2でコイルを動作させた場合の各測定位置での充電効率の例を示す図。
【図6】本発明の実施例1に係るワイヤレス充電器の構成を示すブロック図。
【図7】本発明の実施例1に係るワイヤレス充電器の動作を示すフローチャート。
【図8】本発明の実施例2に係るワイヤレス充電器の構成を示すブロック図。
【図9】本発明の実施例2に係るワイヤレス充電器の動作を示すフローチャート。
【図10】本発明の実施例3に係るワイヤレス充電器の構成を示すブロック図。
【図11】本発明の実施例3に係るワイヤレス充電器の動作を示すフローチャート。
【図12】本発明の実施例4に係るワイヤレス充電器の構成を示すブロック図。
【図13】本発明の実施例4に係るワイヤレス充電器の動作を示すフローチャート。
【図14】本発明の実施例5に係るワイヤレス充電器の構成を示すブロック図。
【図15】本発明の実施例5に係るワイヤレス充電器の動作を示すフローチャート。
【図16】本発明の実施例6に係るワイヤレス充電器の構成を示すブロック図。
【図17】本発明の実施例6に係るワイヤレス充電器の動作を示すフローチャート。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について、詳細に説明する。なお、同じ機能を有する構成部には同じ番号を付し、重複説明を省略する。
【0015】
<位置検出部1、初期位置調整部2>
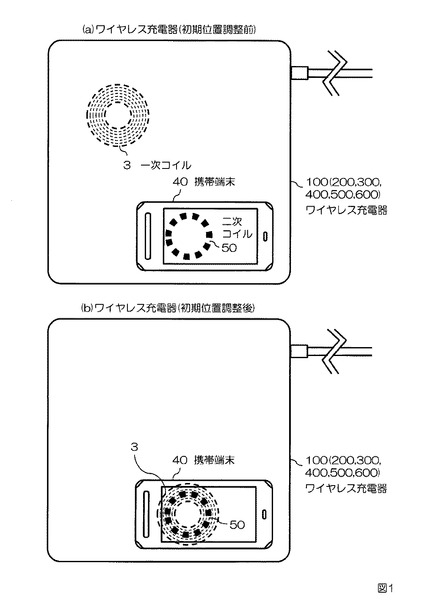
まず、本発明の全ての実施例に係るワイヤレス充電器が備える位置検出部1、初期位置調整部2の動作について図1を用いて説明する。図1は本発明の全ての実施例に係るワイヤレス充電器が備える初期位置調整部2の動作を説明する図である。図1(a)は、初期位置調整部2による初期位置調整前のワイヤレス充電器の状態を示す図である。図1(b)は、初期位置調整部2による初期位置調整後のワイヤレス充電器の状態を示す図である。本発明のワイヤレス充電器100、200、300、400、500、600は、例えばタブレット形状(厚さの薄い直方体形状)の筐体を有するものとして構成することができる。被充電機器を充電したい場合には、図1に表すようにワイヤレス充電器100、200、300、400、500、600の被充電機器配置面に被充電機器を置く。本明細書では被充電機器の例として携帯端末40を想定して説明を進める。この例に限られず、本発明のワイヤレス充電器が充電することができる被充電機器は電池パック、カメラ、ゲーム機、その他小型のポータブルデバイスなど多岐にわたる。ワイヤレス充電器100、200、300、400、500、600の筐体内部には、携帯端末40内のコイル(二次コイル50)と、電磁誘導で結合され、二次コイル50に誘導電流を送信することができるコイル(一次コイル3)が内蔵されている。本発明のワイヤレス充電器は、前述したムービングコイル方式を採用している。一次コイル3は、ワイヤレス充電器の筐体内部に設けられた可動範囲(空隙)内であって、被充電機器配置面と平行な平面内を自由に移動することができる。本発明のワイヤレス充電器100、200、300、400、500、600が備える位置検出部1は、被充電機器配置面に配置された携帯端末40の二次コイル50の位置を検出する(S1)。位置検出部1は、例えば前述したように検出コイルを内蔵することによって実現可能である。この場合、検出コイルがワイヤレス充電器の筐体内部の可動範囲を走査して、二次コイル50の大まかな位置を検出する。次に、本発明のワイヤレス充電器100、200、300、400、500、600が備える初期位置調整部2は、位置検出部1が検出した二次コイル50の大まかな位置に基づいて、一次コイル3を移動させ、試験的に電力伝送を開始して、充電効率が最大となる最適な位置(一次コイル3の軸心と、二次コイル50の軸心とが一致する位置、以下、初期位置という)に一次コイル3の位置を調整する(S2)。これにより一次コイル3は初期位置に調整され、図1(b)の状態となる。
【0016】
<コイル制御手段11、効率測定手段12(動作例1)>
次に、図2、3を参照して、コイル制御手段11の動作例1と、本動作例により測定される充電効率の例について説明する。図2は本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例1を示す図である。図3は本動作例1で一次コイル3を動作させた場合の各測定位置で測定される充電効率の例を示す図である。図3(a)は測定される充電効率の例を表として表したものであって、行は一次コイル3の初期位置からの移動距離、列は測定方向(°)を表す。図3(b)は測定される充電効率の例をグラフとして表したものであって縦軸は充電効率、横軸は一次コイル3の初期位置からの移動距離(cm)を表す。コイル制御手段11は、一次コイル3を、初期位置を基準として一次コイル3の軸心と垂直な平面内(ワイヤレス充電器の筐体内の可動範囲として設けられた空隙内の平面)の2以上の方向(以下、測定方向という)毎に初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動する(SS11)。例えば図2の例では、コイル制御手段11は、一次コイル3を、初期位置を基準として隣り合う測定方向のなす角度が等しくなるような8方向の測定方向毎に初期位置から1cmずつ離れた測定位置(初期位置から1、2、3、4cm離れた計4点)に順次移動する。効率測定手段12は、測定位置毎に被充電機器(携帯端末40)の充電効率を測定する(SS12)。効率測定手段12が測定した充電効率は、例えば図3(a)のようにテーブルとして管理されて一時メモリなどに記憶されることとしてもよい。ワイヤレス充電器の被充電機器配置面に異物が存在しない場合、充電効率は、例えば図3(b)の破線のグラフのように初期位置において最大値となり、一次コイル3が初期位置から遠ざかるにつれて低下する。一方、本発明のワイヤレス充電器の被充電機器配置面に異物が存在する場合、充電効率の変化の様子は、例えば図3(b)の実線のグラフのように、異物がない場合のグラフと比較して充電効率が全体的に低下したり、充電効率の変化の傾きにムラが生じる。
【0017】
<コイル制御手段11、効率測定手段12(動作例2)>
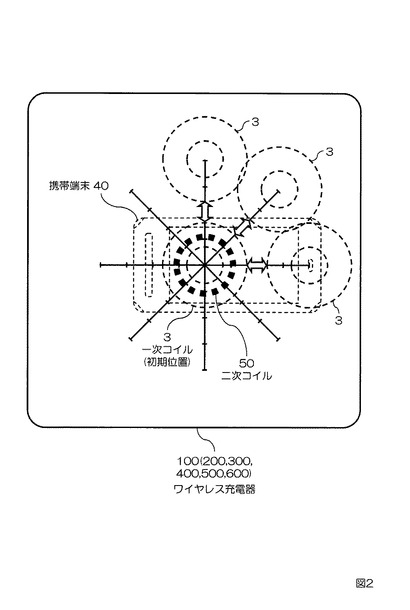
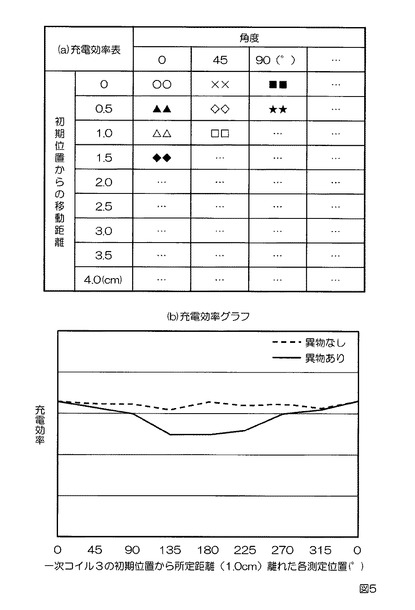
次に、図4、5を参照して、コイル制御手段11の動作例2と、本動作例により測定される充電効率の例について説明する。図4は本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例2を示す図である。図5は本動作例2で一次コイル3を動作させた場合の各測定位置で測定される充電効率の例を示す図である。図5(a)は測定される充電効率の例を表として表したものであって、行は一次コイル3の初期位置からの移動距離、列は測定方向(°)を表す。図5(b)は測定される充電効率の例をグラフとして表したものであって縦軸は充電効率、横軸は一次コイル3の初期値から所定距離(1.0cm)離れた各測定位置の角度(°)を表す。コイル制御手段11は、一次コイル3のコイル中心を、一次コイル3の軸心と垂直な平面内(ワイヤレス充電器の筐体内の可動範囲として設けられた空隙内の平面)の初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、動作例1において定義された測定位置と併せてこの位置も測定位置と呼ぶ)に順次移動する(SS11)。例えば図4の例では、コイル制御手段11は、一次コイル3のコイル中心を、初期位置におけるコイル中心を中心とした2つの同心円の円周上の円毎に予め定めた測定位置に順次回転移動する。効率測定手段12は、測定位置毎に被充電機器(携帯端末40)の充電効率を測定する(SS12)。例えば、初期位置におけるコイル中心を中心とした半径1、2、3、4cmの4つの同心円の円周上に、初期位置を対角線の交点とした正八角形の対角線と各同心円の円周との交点とを測定点として配置した場合には、動作例1で説明した図2の測定位置と同じ地点での充電効率データが得られる。図5は、図2と同じ測定位置で測定した充電効率を表及びグラフとして表している。図5(a)については、図3(a)と全く同じであるため、説明を割愛する。ワイヤレス充電器の被充電機器配置面に異物が存在しない場合、充電効率は、例えば図5(b)の破線のグラフのように初期位置から半径1cmの円周上に配置された各測定位置において大きな変動はなく、一定の充電効率を維持している。一方、ワイヤレス充電器の被充電機器配置面に異物が存在する場合、充電効率は、例えば図5(b)の実線のグラフのように、異物が存在する方向における充電効率において、充電効率が低下したり、ムラが生じる。
【0018】
以上、本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例1、動作例2を説明したが、本発明のコイル制御手段11の動作は図2〜図5で表される動作の例に限定されず、例えば測定方向を2方向、4方向等とすることも可能であるし、初期位置からの距離を等間隔とせずに測定位置を決めることもできる。また、動作例1、2では初期位置におけるコイル中心を原点とした極座標上の点を測定点として定義したが、これに限られず初期位置におけるコイル中心を原点としたデカルト座標上の点を測定点として定義してもよい。
【実施例1】
【0019】
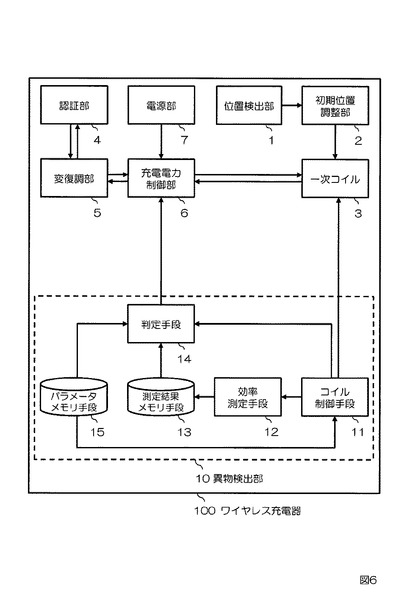
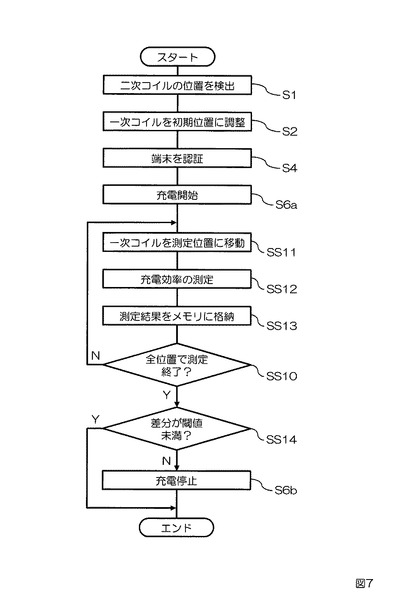
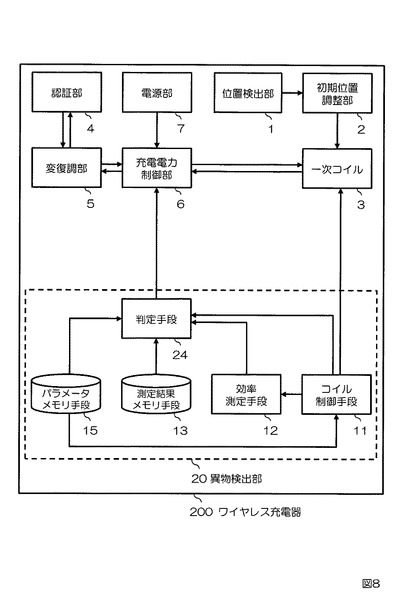
上述を前提として、本発明の最も基本的な構成例である実施例1に係るワイヤレス充電器について、図6、図7を参照して詳細に説明する。図6は本実施例に係るワイヤレス充電器100の構成を示すブロック図である。図7は本実施例に係るワイヤレス充電器100の動作を示すフローチャートである。本実施例のワイヤレス充電器100は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部10とを備える。異物検出部10は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段14と、パラメータメモリ手段15とを備える。前述したように、一次コイル3は、二次コイル50と電磁誘導で結合され、二次コイル50に誘導電流を送信することができる。パラメータメモリ手段15には、本発明のワイヤレス充電器の動作に必要なパラメータが記憶されている。パラメータとは、例えばコイル制御手段11が一次コイル3の制御に用いる測定位置の座標情報(極座標形式の場合は角度と距離、デカルト座標形式の場合は初期位置を原点としたxy値など)や、判定手段14が用いる閾値、等である。
【0020】
以下、各構成部の動作について説明する。位置検出部1は、二次コイル50の位置を検出する(S1)。初期位置調整部2は、一次コイル3の軸心と、二次コイル50の軸心とが一致する初期位置に一次コイル3の位置を調整する(S2)。携帯端末40は、二次コイル50を通じてワイヤレス充電器100に認証情報を送信する。一次コイル3は携帯端末40から認証情報を受信して、当該認証情報を変復調部5に送信する。変復調部5は、受信した認証情報を復調して認証部4に送信する。認証部4は、復調された認証情報を受信して認証を行う(S4)。認証成功は、携帯端末40がワイヤレス充電器100において電力供給可能な機器であることを示す。認証失敗は、携帯端末40がワイヤレス充電器100によって電力供給することが出来ない機器であることを示す。充電電力制御部6は、電源部7からの供給電力により一次コイル3への送電を制御し、認証部4による認証が成功した場合に充電を開始する(S6a)。
【0021】
以下、異物検出部10内の各構成手段の動作について説明する。コイル制御手段11は、一次コイル3を、初期位置を基準として一次コイル3の軸心と垂直な平面内の2以上の測定方向毎に初期位置から所定の間隔ずつ離れた測定位置に順次移動する(SS11)。効率測定手段12は、測定位置毎に携帯端末40の充電効率を測定する(SS12)。充電効率の測定は、例えば以下のように行うことができる。
(充電効率)=(被充電機器の充電電力)/(充電器の送信電力)
測定結果メモリ手段13は、測定された充電効率を記憶する(SS13)。全測定位置で充電効率の測定が終了した場合(SS10Y)、サブステップSS14に進む。何れかの測定位置において充電効率の測定が未だ行われていない場合(SS10N)、サブステップSS11に戻り、サブステップSS11、SS12、SS13が繰り返される。次に、判定手段14は、何れかの測定方向における初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が、パラメータメモリ手段15に予め記憶した閾値以上となる場合には充電電力制御部6に充電停止命令を送信する(SS14N)。充電電力制御部6は、判定手段14から送信された充電停止命令を検知した場合に一次コイル3への送電を停止する(S6b)。一方、何れの測定位置においても、差分が閾値未満となる場合には、充電動作が継続される(SS14Y、エンド)。
【0022】
本実施例のワイヤレス充電器100によれば、異物検出部10のコイル制御手段11が一次コイル3を初期位置を原点とする各測定位置に移動制御し、効率測定手段12が各測定位置において充電効率を測定し、判定手段14が同一距離における測定位置の充電効率を比較することにより異物の有無を検出するため、従来よりもより小さな異物を検出することが可能となり、その異物の発熱を防止してユーザが不安全になることを防ぐことができる。
【実施例2】
【0023】
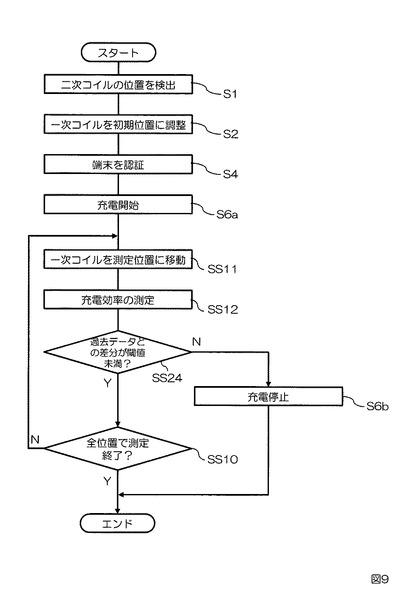
次に、実施例1とは異なる方法で異物検出判定を行う実施例2に係るワイヤレス充電器について図8、図9を参照して詳細に説明する。図8は本実施例に係るワイヤレス充電器200の構成を示すブロック図である。図9は本実施例に係るワイヤレス充電器200の動作を示すフローチャートである。本実施例のワイヤレス充電器200は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部20とを備える。異物検出部20は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15とを備える。実施例1のワイヤレス充電器100と本実施例のワイヤレス充電器200の相違点は、実施例1のワイヤレス充電器100の異物検出部10、判定手段14が本実施例のワイヤレス充電器200において異物検出部20、判定手段24に変更されている点のみである。従って、実施例1のワイヤレス充電器100と同一番号を付した本実施例のワイヤレス充電器200における各構成部の説明を割愛する。
【0024】
本実施例のワイヤレス充電器200においては、測定結果メモリ手段13に過去の測定結果を基準充電効率として記憶しておき、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値以上となる場合には、判定手段24が充電電力制御部6に充電停止命令を送信する(SS24N)。基準充電効率のデータについては過去の測定結果に限られず、ワイヤレス充電器200の工場出荷時点において、標準的な充電効率のデータとして予め記憶しておくデータを用いることとしてもよい。一方、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値未満となる場合には、サブステップSS10に進む(SS24Y)。サブステップSS10において、全測定位置においてサブステップSS11、SS12、SS24の動作が終了しているかチェックし、全測定位置で測定および判定が終了していない場合には(SS10N)、サブステップSS11に戻り、次の測定位置において、サブステップSS11、SS12、SS24(S6b)の動作を行う。
【0025】
本実施例のワイヤレス充電器200によれば、判定手段24が過去の充電効率データなどを基準充電効率として、効率測定手段12において新たに測定された充電効率と比較することで、実施例1と同様の効果に加えて、全ての測定位置について充電効率を測定しなくても、閾値以上となる測定位置検出と同時に充電動作を停止することができるため、ユーザの安全性をより確保しやすい。
【実施例3】
【0026】
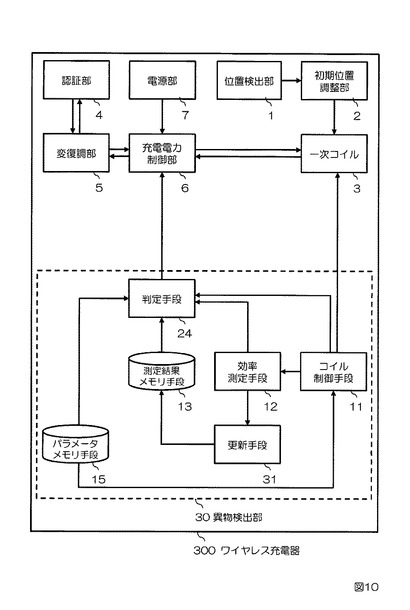
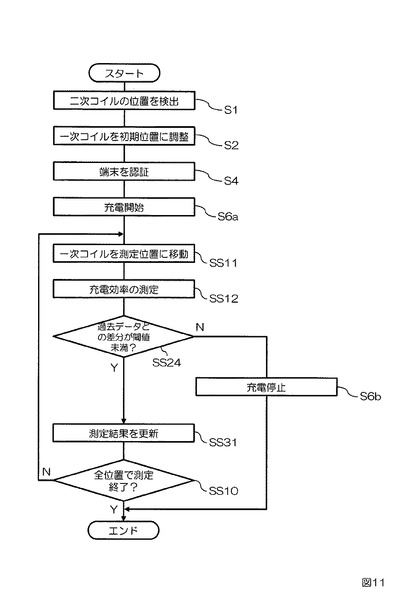
次に、実施例2のワイヤレス充電器200に基準充電効率を更新する機能を追加した実施例3に係るワイヤレス充電器について図10、図11を参照して詳細に説明する。図10は本実施例に係るワイヤレス充電器300の構成を示すブロック図である。図11は本実施例に係るワイヤレス充電器300の動作を示すフローチャートである。本実施例のワイヤレス充電器300は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部30とを備える。異物検出部30は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31とを備える。実施例2のワイヤレス充電器200と本実施例のワイヤレス充電器300の相違点は、実施例2のワイヤレス充電器200の異物検出部20が備えていない更新手段31が、本実施例のワイヤレス充電器300において追加されている点のみである。従って、実施例2のワイヤレス充電器200と同一番号を付した本実施例のワイヤレス充電器300における各構成部の説明を割愛する。
【0027】
本実施例のワイヤレス充電器300においては、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値未満となる場合には、サブステップSS31に進み、更新手段31が当該測定位置における基準充電効率を更新する(SS31)。更新の方法としては、例えば重み付け係数w1、w2を用いて、(更新後の基準充電効率)=(更新前の基準充電効率)×w1+(最新の充電効率)×w2として計算することができる。サブステップSS31実行後はサブステップSS10に進み、全測定位置においてサブステップSS11、SS12、SS24、SS31の動作が終了しているかチェックし、全測定位置で測定および判定が終了していない場合には(SS10N)、サブステップSS11に戻り、次の測定位置において、サブステップSS11、SS12、SS24(S6b)、SS31の動作を行う。
【0028】
本実施例のワイヤレス充電器300によれば、更新手段31が測定された最新の充電効率を用いて基準充電効率を更新するため、実施例2の効果に加えて、機器の経年劣化その他の理由により、基準充電効率と異物がない場合に測定される充電効率との間に一定値以上の乖離が生じた場合でも、これにより誤動作を誘発すること無く、精度よく異物検出を行うことができ、ユーザが不安全になることを防ぐことができる。
【実施例4】
【0029】
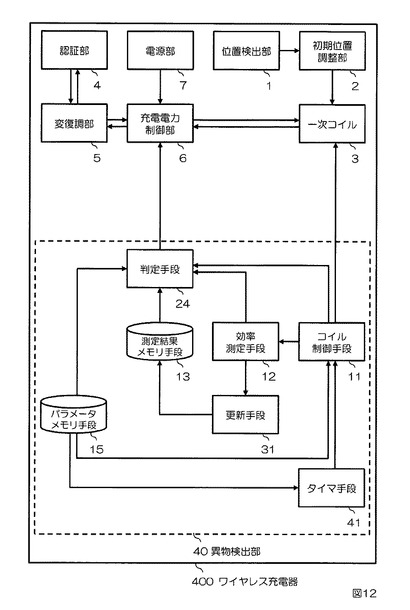
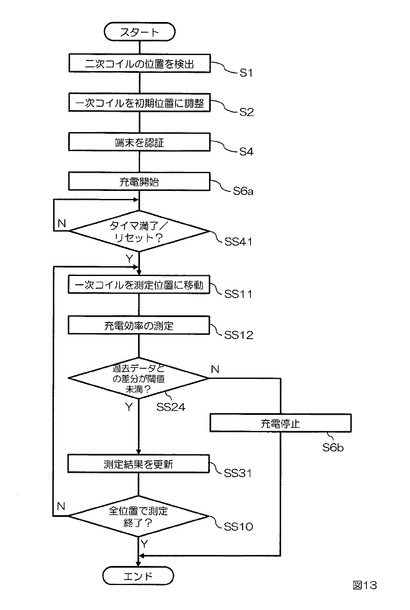
次に、実施例3のワイヤレス充電器300にタイマ機能を追加した実施例4に係るワイヤレス充電器について図12、図13を参照して詳細に説明する。図12は本実施例に係るワイヤレス充電器400の構成を示すブロック図である。図13は本実施例に係るワイヤレス充電器400の動作を示すフローチャートである。本実施例のワイヤレス充電器400は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部40とを備える。異物検出部40は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41とを備える。実施例3のワイヤレス充電器300と本実施例のワイヤレス充電器400の相違点は、実施例3のワイヤレス充電器300の異物検出部30が備えていないタイマ手段41が、本実施例のワイヤレス充電器400において追加されている点のみである。従って、実施例3のワイヤレス充電器300と同一番号を付した本実施例のワイヤレス充電器400における各構成部の説明を割愛する。
【0030】
本実施例のワイヤレス充電器400においては、タイマ手段41が一定時刻毎(タイマ満了時、タイマリセット時)にコイル制御命令を発信するものとし(SS41Y)、タイマが満了(リセット)した場合に限り、ステップSS11、SS12、SS24(S6b)、SS31、SS10の各動作が実行される。タイマ手段41は、満充電となった場合、被充電機器が被充電機器配置面から除外された場合、充電が異常停止した場合にはリセットされる。
【0031】
本実施例のワイヤレス充電器400によれば、タイマ手段41のタイマ満了時に限り、本発明のワイヤレス充電器が備える異物検出動作が開始されるため、実施例3の効果に加えて、一定時刻おきに異物検出動作を実行させることができ、充電開始後に何らかの要因で新たに置かれることとなった異物をも検出することができ、ユーザの安全性をさらに高めることができる。
【実施例5】
【0032】
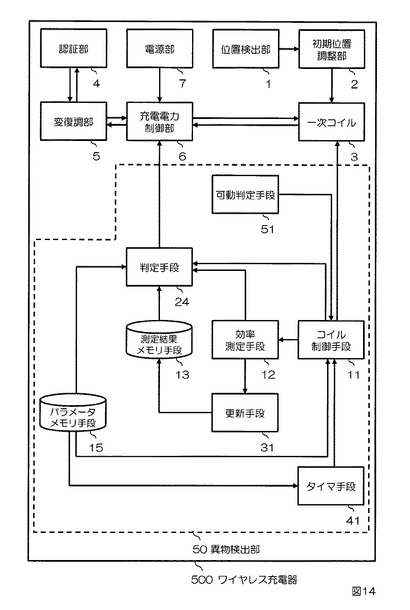
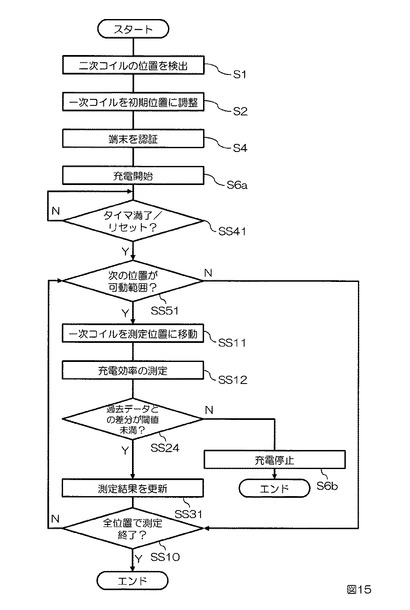
次に、実施例4のワイヤレス充電器400に一次コイル3の可動範囲判定機能を追加した実施例5に係るワイヤレス充電器について図14、図15を参照して詳細に説明する。図14は本実施例に係るワイヤレス充電器500の構成を示すブロック図である。図15は本実施例に係るワイヤレス充電器500の動作を示すフローチャートである。本実施例のワイヤレス充電器500は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部50とを備える。異物検出部50は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41と、可動判定手段51とを備える。実施例4のワイヤレス充電器400と本実施例のワイヤレス充電器500の相違点は、実施例4のワイヤレス充電器400の異物検出部40が備えていない可動判定手段51が、本実施例のワイヤレス充電器500において追加されている点のみである。従って、実施例4のワイヤレス充電器400と同一番号を付した本実施例のワイヤレス充電器500における各構成部の説明を割愛する。
【0033】
本実施例のワイヤレス充電器500においては、サブステップSS11(コイル制御手段11の動作)の直前に、可動判定手段51がコイル制御手段11が次に移動させようとする測定位置が一次コイル3の可動範囲内であるか否かを判定する(SS51)。携帯端末40が、ワイヤレス充電器500の被充電機器配置面の端部に置かれた場合、測定位置の一部が、ワイヤレス充電器500の外側の領域にはみ出すことがあるためである。可動判定手段51が、測定位置が可動範囲内でないと判定した場合(SS51N)、コイル制御手段11は、当該測定位置への一次コイル3の移動を行わない。この場合、サブステップSS10に移動して、全ての測定位置で充電効率の測定が終了しているかをチェックする(SS10)。一方、可動判定手段51が、測定位置が可動範囲内であると判定した場合(SS51Y)、コイル制御手段11は、当該測定位置への一次コイル3の移動を行う(SS11)。この場合、実施例4と同様にサブステップSS12以下の動作が実行される。
【0034】
本実施例のワイヤレス充電器500によれば、一次コイル3の可動範囲外に測定位置が存在する場合でも、当該測定位置を除外して他の測定位置のみで異物検出を行うことができる。
【実施例6】
【0035】
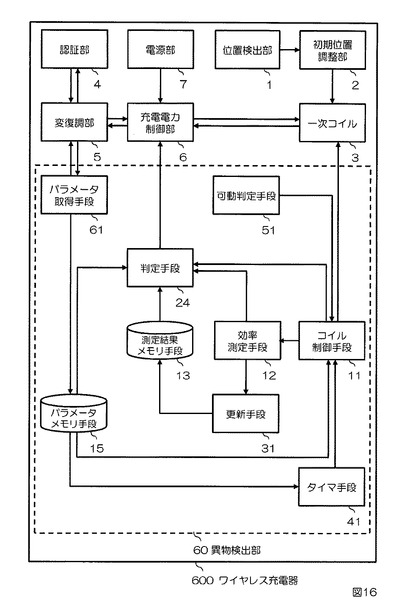
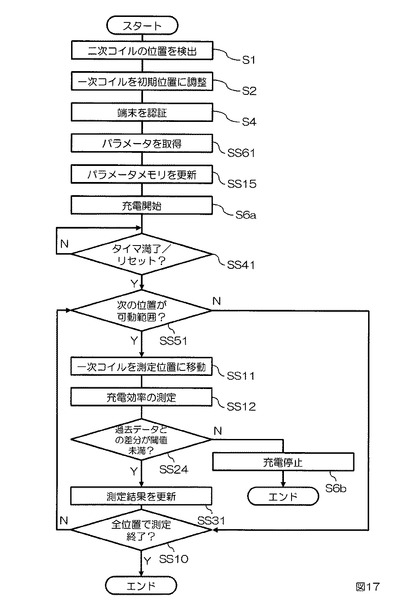
次に、実施例5のワイヤレス充電器500に一次コイル3の動作等に関するパラメータを被充電機器から取得する機能を追加した実施例6に係るワイヤレス充電器について図16、図17を参照して詳細に説明する。図16は本実施例に係るワイヤレス充電器600の構成を示すブロック図である。図17は本実施例に係るワイヤレス充電器600の動作を示すフローチャートである。本実施例のワイヤレス充電器600は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部60とを備える。異物検出部60は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41と、可動判定手段51と、パラメータ取得手段61とを備える。実施例5のワイヤレス充電器500と本実施例のワイヤレス充電器600の相違点は、実施例5のワイヤレス充電器500の異物検出部50が備えていないパラメータ取得手段61が、本実施例のワイヤレス充電器600において追加されている点のみである。従って、実施例5のワイヤレス充電器500と同一番号を付した本実施例のワイヤレス充電器600における各構成部の説明を割愛する。
【0036】
本実施例のワイヤレス充電器600においては、ステップS4(被充電機器認証動作)と同時、又はその後に、パラメータ取得手段61が被充電機器が保有するパラメータを二次コイル50、一次コイル3、変復調部5を介して取得して(SS61)、当該取得したパラメータをパラメータメモリ手段15に記憶する。前述したように、パラメータとは、コイル制御手段11が一次コイル3の制御に用いる測定位置の座標情報や、判定手段24が用いる閾値、タイマ手段41が用いるタイマ開始からタイマ満了までの時間情報、等である。
【0037】
本実施例のワイヤレス充電器600によれば、パラメータ取得手段61が被充電機器側で設定、更新したパラメータを取得して、当該取得したパラメータをパラメータメモリ手段15に記憶するため、パラメータの設定、変更、更新を被充電機器側で行うことができ、ユーザの利便性が高まる。
【技術分野】
【0001】
本発明はワイヤレス充電器上に存在する異物を検出するワイヤレス充電器、異物検出方法に関する。
【背景技術】
【0002】
近年、ワイヤレス充電の国際標準仕様(非特許文献1)が策定され、本仕様において電磁誘導方式での非接触充電時の充電器と被充電機器(電池パック、携帯電話、カメラ、ゲーム機、その他の小型のポータブルデバイス)間での充電開始前の認証や充電時の電力制御方法、充電器と被充電機器間の通信、及び充電器や被充電機器のデザイン等が規定されている。ワイヤレス充電器は本仕様に基づき商品化される。電磁誘導方式でワイヤレス充電を行う場合、充電器のコイル(以下、一次コイルという)と被充電機器のコイル(以下、二次コイルという)の位置を合わせ、効率良く充電する必要がある。一次コイルと二次コイルの位置合わせ方法については例えば以下のような方法がある(非特許文献2)。
【0003】
<ムービングコイル方式>
充電器に内蔵された検出コイルによって、二次コイルのおおよその位置を検出し、その位置に充電器のムービングコイル(一次コイル)を移動させ、電力伝送を開始する。電力伝送を開始した後効率が最大となる最適な位置になるようにムービングコイルの微調整を行う。
【0004】
<コイルアレイ方式>
複数の一次コイルを積層構造として充電器内に隙間なく面状配置し、二次コイルが置かれた位置の最近傍に配置された一次コイルのみをアクティブ状態とすることにより、電力伝送を可能とする。充電器側の電源回路の拡張により、複数の充電機器を同時に充電することが可能となる。
【0005】
<位置合わせガイド方式>
一次コイルの位置に位置合わせを行うためのガイド表示があり、ユーザ自身が被充電機器の位置合わせを行う。一次コイルの中心に磁石を配置することにより、二次コイルが近付いた場合に、磁力で被充電機器を引きよせ、位置合わせをガイドする。
【0006】
ワイヤレス充電器による充電方式の場合、充電器と被充電機器との間に金属異物(例えばピン、クリップなど)が挟まった状態のまま充電動作が継続した場合、挟まった金属異物が発熱して非常に高温になることがあり、ユーザが非常に不安全となる恐れがあった。これに対し、特許文献1の非接触充電器では、二次電池の充電電流と充電電圧から充電電力値を測定し、電力送信部に送り、電力送信部は電力送信部が送った電力値と充電電力値を比較し、比較した値が所定値以内であれば充電を継続し、所定外であれば、金属などの異物挿入ありと判断し、充電を停止する。このように、特許文献1の非接触充電器によれば、充電中に小さな金属を部分的に送信部と受電部の間に挿入した場合でも、異常検出ができ、安全性を高めることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−83094号公報
【非特許文献】
【0008】
【非特許文献1】System Description Wireless Power Transfer Volume I:Low Power Part1:Interface Definition Version 1.0.1.[online].Retrieved from the Internet:<URL: http://www.rrc-wireless-power.de/fileadmin/website_wireless_power/Dokumente/News/WirelessPowerSpecificationPart1.pdf>
【非特許文献2】金井孝之、金井康通、野村直児、「置くだけで充電可能なWPC方式ワイヤレス充電ケータイ」NTTDOCOMOテクニカル・ジャーナル、社団法人電気通信協会、平成23年1月、vol.18、No.4、P.58−60
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1の非接触充電器では、明らかに大きな異物が挿入された場合には、効率が明確に低下するため、これを検知することができるが、ある程度以下の大きさの異物になると効率の低下を正しく検知できなかった。小さな異物であっても金属である場合に、前述同様、異物が発熱してユーザが不安全になる恐れがあった。そこで、本発明では、ワイヤレス充電器上の小さな異物を検出してその異物の発熱を防止することができるワイヤレス充電器、異物検出方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明のワイヤレス充電器は、相互誘導による誘導起電力によって、被充電機器のバッテリを充電することを特徴とし、一次コイルと、位置検出部と、初期位置調整部と、充電電力制御部と、異物検出部とを備える。異物検出部は、コイル制御手段と、効率測定手段と、判定手段とを備える。
【0011】
一次コイルは、被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、二次コイルに誘導電流を送信する。位置検出部は、二次コイルの位置を検出する。初期位置調整部は、一次コイルの軸心と、二次コイルの軸心とが一致する位置(以下、初期位置という)に一次コイルの位置を調整する。充電電力制御部は、一次コイルへの送電を制御し、充電停止命令を検知した場合に一次コイルへの送電を停止する。コイル制御手段は、一次コイルを、初期位置を基準として一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動する。効率測定手段は、測定位置毎に被充電機器の充電効率を測定する。判定手段は、何れかの測定方向における初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電電力制御部に充電停止命令を送信する。
【発明の効果】
【0012】
本発明のワイヤレス充電器によれば、ワイヤレス充電器上の小さな異物を検出して、その異物の発熱を防止することができる
【図面の簡単な説明】
【0013】
【図1】本発明のワイヤレス充電器が備える初期位置調整部の動作を説明する図。
【図2】本発明のワイヤレス充電器が備えるコイル制御手段の動作例1を示す図。
【図3】動作例1でコイルを動作させた場合の各測定位置での充電効率の例を示す図。
【図4】本発明のワイヤレス充電器が備えるコイル制御手段の動作例2を示す図。
【図5】動作例2でコイルを動作させた場合の各測定位置での充電効率の例を示す図。
【図6】本発明の実施例1に係るワイヤレス充電器の構成を示すブロック図。
【図7】本発明の実施例1に係るワイヤレス充電器の動作を示すフローチャート。
【図8】本発明の実施例2に係るワイヤレス充電器の構成を示すブロック図。
【図9】本発明の実施例2に係るワイヤレス充電器の動作を示すフローチャート。
【図10】本発明の実施例3に係るワイヤレス充電器の構成を示すブロック図。
【図11】本発明の実施例3に係るワイヤレス充電器の動作を示すフローチャート。
【図12】本発明の実施例4に係るワイヤレス充電器の構成を示すブロック図。
【図13】本発明の実施例4に係るワイヤレス充電器の動作を示すフローチャート。
【図14】本発明の実施例5に係るワイヤレス充電器の構成を示すブロック図。
【図15】本発明の実施例5に係るワイヤレス充電器の動作を示すフローチャート。
【図16】本発明の実施例6に係るワイヤレス充電器の構成を示すブロック図。
【図17】本発明の実施例6に係るワイヤレス充電器の動作を示すフローチャート。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について、詳細に説明する。なお、同じ機能を有する構成部には同じ番号を付し、重複説明を省略する。
【0015】
<位置検出部1、初期位置調整部2>
まず、本発明の全ての実施例に係るワイヤレス充電器が備える位置検出部1、初期位置調整部2の動作について図1を用いて説明する。図1は本発明の全ての実施例に係るワイヤレス充電器が備える初期位置調整部2の動作を説明する図である。図1(a)は、初期位置調整部2による初期位置調整前のワイヤレス充電器の状態を示す図である。図1(b)は、初期位置調整部2による初期位置調整後のワイヤレス充電器の状態を示す図である。本発明のワイヤレス充電器100、200、300、400、500、600は、例えばタブレット形状(厚さの薄い直方体形状)の筐体を有するものとして構成することができる。被充電機器を充電したい場合には、図1に表すようにワイヤレス充電器100、200、300、400、500、600の被充電機器配置面に被充電機器を置く。本明細書では被充電機器の例として携帯端末40を想定して説明を進める。この例に限られず、本発明のワイヤレス充電器が充電することができる被充電機器は電池パック、カメラ、ゲーム機、その他小型のポータブルデバイスなど多岐にわたる。ワイヤレス充電器100、200、300、400、500、600の筐体内部には、携帯端末40内のコイル(二次コイル50)と、電磁誘導で結合され、二次コイル50に誘導電流を送信することができるコイル(一次コイル3)が内蔵されている。本発明のワイヤレス充電器は、前述したムービングコイル方式を採用している。一次コイル3は、ワイヤレス充電器の筐体内部に設けられた可動範囲(空隙)内であって、被充電機器配置面と平行な平面内を自由に移動することができる。本発明のワイヤレス充電器100、200、300、400、500、600が備える位置検出部1は、被充電機器配置面に配置された携帯端末40の二次コイル50の位置を検出する(S1)。位置検出部1は、例えば前述したように検出コイルを内蔵することによって実現可能である。この場合、検出コイルがワイヤレス充電器の筐体内部の可動範囲を走査して、二次コイル50の大まかな位置を検出する。次に、本発明のワイヤレス充電器100、200、300、400、500、600が備える初期位置調整部2は、位置検出部1が検出した二次コイル50の大まかな位置に基づいて、一次コイル3を移動させ、試験的に電力伝送を開始して、充電効率が最大となる最適な位置(一次コイル3の軸心と、二次コイル50の軸心とが一致する位置、以下、初期位置という)に一次コイル3の位置を調整する(S2)。これにより一次コイル3は初期位置に調整され、図1(b)の状態となる。
【0016】
<コイル制御手段11、効率測定手段12(動作例1)>
次に、図2、3を参照して、コイル制御手段11の動作例1と、本動作例により測定される充電効率の例について説明する。図2は本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例1を示す図である。図3は本動作例1で一次コイル3を動作させた場合の各測定位置で測定される充電効率の例を示す図である。図3(a)は測定される充電効率の例を表として表したものであって、行は一次コイル3の初期位置からの移動距離、列は測定方向(°)を表す。図3(b)は測定される充電効率の例をグラフとして表したものであって縦軸は充電効率、横軸は一次コイル3の初期位置からの移動距離(cm)を表す。コイル制御手段11は、一次コイル3を、初期位置を基準として一次コイル3の軸心と垂直な平面内(ワイヤレス充電器の筐体内の可動範囲として設けられた空隙内の平面)の2以上の方向(以下、測定方向という)毎に初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動する(SS11)。例えば図2の例では、コイル制御手段11は、一次コイル3を、初期位置を基準として隣り合う測定方向のなす角度が等しくなるような8方向の測定方向毎に初期位置から1cmずつ離れた測定位置(初期位置から1、2、3、4cm離れた計4点)に順次移動する。効率測定手段12は、測定位置毎に被充電機器(携帯端末40)の充電効率を測定する(SS12)。効率測定手段12が測定した充電効率は、例えば図3(a)のようにテーブルとして管理されて一時メモリなどに記憶されることとしてもよい。ワイヤレス充電器の被充電機器配置面に異物が存在しない場合、充電効率は、例えば図3(b)の破線のグラフのように初期位置において最大値となり、一次コイル3が初期位置から遠ざかるにつれて低下する。一方、本発明のワイヤレス充電器の被充電機器配置面に異物が存在する場合、充電効率の変化の様子は、例えば図3(b)の実線のグラフのように、異物がない場合のグラフと比較して充電効率が全体的に低下したり、充電効率の変化の傾きにムラが生じる。
【0017】
<コイル制御手段11、効率測定手段12(動作例2)>
次に、図4、5を参照して、コイル制御手段11の動作例2と、本動作例により測定される充電効率の例について説明する。図4は本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例2を示す図である。図5は本動作例2で一次コイル3を動作させた場合の各測定位置で測定される充電効率の例を示す図である。図5(a)は測定される充電効率の例を表として表したものであって、行は一次コイル3の初期位置からの移動距離、列は測定方向(°)を表す。図5(b)は測定される充電効率の例をグラフとして表したものであって縦軸は充電効率、横軸は一次コイル3の初期値から所定距離(1.0cm)離れた各測定位置の角度(°)を表す。コイル制御手段11は、一次コイル3のコイル中心を、一次コイル3の軸心と垂直な平面内(ワイヤレス充電器の筐体内の可動範囲として設けられた空隙内の平面)の初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、動作例1において定義された測定位置と併せてこの位置も測定位置と呼ぶ)に順次移動する(SS11)。例えば図4の例では、コイル制御手段11は、一次コイル3のコイル中心を、初期位置におけるコイル中心を中心とした2つの同心円の円周上の円毎に予め定めた測定位置に順次回転移動する。効率測定手段12は、測定位置毎に被充電機器(携帯端末40)の充電効率を測定する(SS12)。例えば、初期位置におけるコイル中心を中心とした半径1、2、3、4cmの4つの同心円の円周上に、初期位置を対角線の交点とした正八角形の対角線と各同心円の円周との交点とを測定点として配置した場合には、動作例1で説明した図2の測定位置と同じ地点での充電効率データが得られる。図5は、図2と同じ測定位置で測定した充電効率を表及びグラフとして表している。図5(a)については、図3(a)と全く同じであるため、説明を割愛する。ワイヤレス充電器の被充電機器配置面に異物が存在しない場合、充電効率は、例えば図5(b)の破線のグラフのように初期位置から半径1cmの円周上に配置された各測定位置において大きな変動はなく、一定の充電効率を維持している。一方、ワイヤレス充電器の被充電機器配置面に異物が存在する場合、充電効率は、例えば図5(b)の実線のグラフのように、異物が存在する方向における充電効率において、充電効率が低下したり、ムラが生じる。
【0018】
以上、本発明のワイヤレス充電器100、200、300、400、500、600が備えるコイル制御手段11の動作例1、動作例2を説明したが、本発明のコイル制御手段11の動作は図2〜図5で表される動作の例に限定されず、例えば測定方向を2方向、4方向等とすることも可能であるし、初期位置からの距離を等間隔とせずに測定位置を決めることもできる。また、動作例1、2では初期位置におけるコイル中心を原点とした極座標上の点を測定点として定義したが、これに限られず初期位置におけるコイル中心を原点としたデカルト座標上の点を測定点として定義してもよい。
【実施例1】
【0019】
上述を前提として、本発明の最も基本的な構成例である実施例1に係るワイヤレス充電器について、図6、図7を参照して詳細に説明する。図6は本実施例に係るワイヤレス充電器100の構成を示すブロック図である。図7は本実施例に係るワイヤレス充電器100の動作を示すフローチャートである。本実施例のワイヤレス充電器100は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部10とを備える。異物検出部10は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段14と、パラメータメモリ手段15とを備える。前述したように、一次コイル3は、二次コイル50と電磁誘導で結合され、二次コイル50に誘導電流を送信することができる。パラメータメモリ手段15には、本発明のワイヤレス充電器の動作に必要なパラメータが記憶されている。パラメータとは、例えばコイル制御手段11が一次コイル3の制御に用いる測定位置の座標情報(極座標形式の場合は角度と距離、デカルト座標形式の場合は初期位置を原点としたxy値など)や、判定手段14が用いる閾値、等である。
【0020】
以下、各構成部の動作について説明する。位置検出部1は、二次コイル50の位置を検出する(S1)。初期位置調整部2は、一次コイル3の軸心と、二次コイル50の軸心とが一致する初期位置に一次コイル3の位置を調整する(S2)。携帯端末40は、二次コイル50を通じてワイヤレス充電器100に認証情報を送信する。一次コイル3は携帯端末40から認証情報を受信して、当該認証情報を変復調部5に送信する。変復調部5は、受信した認証情報を復調して認証部4に送信する。認証部4は、復調された認証情報を受信して認証を行う(S4)。認証成功は、携帯端末40がワイヤレス充電器100において電力供給可能な機器であることを示す。認証失敗は、携帯端末40がワイヤレス充電器100によって電力供給することが出来ない機器であることを示す。充電電力制御部6は、電源部7からの供給電力により一次コイル3への送電を制御し、認証部4による認証が成功した場合に充電を開始する(S6a)。
【0021】
以下、異物検出部10内の各構成手段の動作について説明する。コイル制御手段11は、一次コイル3を、初期位置を基準として一次コイル3の軸心と垂直な平面内の2以上の測定方向毎に初期位置から所定の間隔ずつ離れた測定位置に順次移動する(SS11)。効率測定手段12は、測定位置毎に携帯端末40の充電効率を測定する(SS12)。充電効率の測定は、例えば以下のように行うことができる。
(充電効率)=(被充電機器の充電電力)/(充電器の送信電力)
測定結果メモリ手段13は、測定された充電効率を記憶する(SS13)。全測定位置で充電効率の測定が終了した場合(SS10Y)、サブステップSS14に進む。何れかの測定位置において充電効率の測定が未だ行われていない場合(SS10N)、サブステップSS11に戻り、サブステップSS11、SS12、SS13が繰り返される。次に、判定手段14は、何れかの測定方向における初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における初期位置から同一距離離れた測定位置における充電効率との差分が、パラメータメモリ手段15に予め記憶した閾値以上となる場合には充電電力制御部6に充電停止命令を送信する(SS14N)。充電電力制御部6は、判定手段14から送信された充電停止命令を検知した場合に一次コイル3への送電を停止する(S6b)。一方、何れの測定位置においても、差分が閾値未満となる場合には、充電動作が継続される(SS14Y、エンド)。
【0022】
本実施例のワイヤレス充電器100によれば、異物検出部10のコイル制御手段11が一次コイル3を初期位置を原点とする各測定位置に移動制御し、効率測定手段12が各測定位置において充電効率を測定し、判定手段14が同一距離における測定位置の充電効率を比較することにより異物の有無を検出するため、従来よりもより小さな異物を検出することが可能となり、その異物の発熱を防止してユーザが不安全になることを防ぐことができる。
【実施例2】
【0023】
次に、実施例1とは異なる方法で異物検出判定を行う実施例2に係るワイヤレス充電器について図8、図9を参照して詳細に説明する。図8は本実施例に係るワイヤレス充電器200の構成を示すブロック図である。図9は本実施例に係るワイヤレス充電器200の動作を示すフローチャートである。本実施例のワイヤレス充電器200は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部20とを備える。異物検出部20は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15とを備える。実施例1のワイヤレス充電器100と本実施例のワイヤレス充電器200の相違点は、実施例1のワイヤレス充電器100の異物検出部10、判定手段14が本実施例のワイヤレス充電器200において異物検出部20、判定手段24に変更されている点のみである。従って、実施例1のワイヤレス充電器100と同一番号を付した本実施例のワイヤレス充電器200における各構成部の説明を割愛する。
【0024】
本実施例のワイヤレス充電器200においては、測定結果メモリ手段13に過去の測定結果を基準充電効率として記憶しておき、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値以上となる場合には、判定手段24が充電電力制御部6に充電停止命令を送信する(SS24N)。基準充電効率のデータについては過去の測定結果に限られず、ワイヤレス充電器200の工場出荷時点において、標準的な充電効率のデータとして予め記憶しておくデータを用いることとしてもよい。一方、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値未満となる場合には、サブステップSS10に進む(SS24Y)。サブステップSS10において、全測定位置においてサブステップSS11、SS12、SS24の動作が終了しているかチェックし、全測定位置で測定および判定が終了していない場合には(SS10N)、サブステップSS11に戻り、次の測定位置において、サブステップSS11、SS12、SS24(S6b)の動作を行う。
【0025】
本実施例のワイヤレス充電器200によれば、判定手段24が過去の充電効率データなどを基準充電効率として、効率測定手段12において新たに測定された充電効率と比較することで、実施例1と同様の効果に加えて、全ての測定位置について充電効率を測定しなくても、閾値以上となる測定位置検出と同時に充電動作を停止することができるため、ユーザの安全性をより確保しやすい。
【実施例3】
【0026】
次に、実施例2のワイヤレス充電器200に基準充電効率を更新する機能を追加した実施例3に係るワイヤレス充電器について図10、図11を参照して詳細に説明する。図10は本実施例に係るワイヤレス充電器300の構成を示すブロック図である。図11は本実施例に係るワイヤレス充電器300の動作を示すフローチャートである。本実施例のワイヤレス充電器300は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部30とを備える。異物検出部30は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31とを備える。実施例2のワイヤレス充電器200と本実施例のワイヤレス充電器300の相違点は、実施例2のワイヤレス充電器200の異物検出部20が備えていない更新手段31が、本実施例のワイヤレス充電器300において追加されている点のみである。従って、実施例2のワイヤレス充電器200と同一番号を付した本実施例のワイヤレス充電器300における各構成部の説明を割愛する。
【0027】
本実施例のワイヤレス充電器300においては、効率測定手段12が測定した何れかの測定位置における充電効率と測定結果メモリ手段13に記憶された同一測定位置の基準充電効率との差分がパラメータメモリ手段15に予め記憶した閾値未満となる場合には、サブステップSS31に進み、更新手段31が当該測定位置における基準充電効率を更新する(SS31)。更新の方法としては、例えば重み付け係数w1、w2を用いて、(更新後の基準充電効率)=(更新前の基準充電効率)×w1+(最新の充電効率)×w2として計算することができる。サブステップSS31実行後はサブステップSS10に進み、全測定位置においてサブステップSS11、SS12、SS24、SS31の動作が終了しているかチェックし、全測定位置で測定および判定が終了していない場合には(SS10N)、サブステップSS11に戻り、次の測定位置において、サブステップSS11、SS12、SS24(S6b)、SS31の動作を行う。
【0028】
本実施例のワイヤレス充電器300によれば、更新手段31が測定された最新の充電効率を用いて基準充電効率を更新するため、実施例2の効果に加えて、機器の経年劣化その他の理由により、基準充電効率と異物がない場合に測定される充電効率との間に一定値以上の乖離が生じた場合でも、これにより誤動作を誘発すること無く、精度よく異物検出を行うことができ、ユーザが不安全になることを防ぐことができる。
【実施例4】
【0029】
次に、実施例3のワイヤレス充電器300にタイマ機能を追加した実施例4に係るワイヤレス充電器について図12、図13を参照して詳細に説明する。図12は本実施例に係るワイヤレス充電器400の構成を示すブロック図である。図13は本実施例に係るワイヤレス充電器400の動作を示すフローチャートである。本実施例のワイヤレス充電器400は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部40とを備える。異物検出部40は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41とを備える。実施例3のワイヤレス充電器300と本実施例のワイヤレス充電器400の相違点は、実施例3のワイヤレス充電器300の異物検出部30が備えていないタイマ手段41が、本実施例のワイヤレス充電器400において追加されている点のみである。従って、実施例3のワイヤレス充電器300と同一番号を付した本実施例のワイヤレス充電器400における各構成部の説明を割愛する。
【0030】
本実施例のワイヤレス充電器400においては、タイマ手段41が一定時刻毎(タイマ満了時、タイマリセット時)にコイル制御命令を発信するものとし(SS41Y)、タイマが満了(リセット)した場合に限り、ステップSS11、SS12、SS24(S6b)、SS31、SS10の各動作が実行される。タイマ手段41は、満充電となった場合、被充電機器が被充電機器配置面から除外された場合、充電が異常停止した場合にはリセットされる。
【0031】
本実施例のワイヤレス充電器400によれば、タイマ手段41のタイマ満了時に限り、本発明のワイヤレス充電器が備える異物検出動作が開始されるため、実施例3の効果に加えて、一定時刻おきに異物検出動作を実行させることができ、充電開始後に何らかの要因で新たに置かれることとなった異物をも検出することができ、ユーザの安全性をさらに高めることができる。
【実施例5】
【0032】
次に、実施例4のワイヤレス充電器400に一次コイル3の可動範囲判定機能を追加した実施例5に係るワイヤレス充電器について図14、図15を参照して詳細に説明する。図14は本実施例に係るワイヤレス充電器500の構成を示すブロック図である。図15は本実施例に係るワイヤレス充電器500の動作を示すフローチャートである。本実施例のワイヤレス充電器500は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部50とを備える。異物検出部50は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41と、可動判定手段51とを備える。実施例4のワイヤレス充電器400と本実施例のワイヤレス充電器500の相違点は、実施例4のワイヤレス充電器400の異物検出部40が備えていない可動判定手段51が、本実施例のワイヤレス充電器500において追加されている点のみである。従って、実施例4のワイヤレス充電器400と同一番号を付した本実施例のワイヤレス充電器500における各構成部の説明を割愛する。
【0033】
本実施例のワイヤレス充電器500においては、サブステップSS11(コイル制御手段11の動作)の直前に、可動判定手段51がコイル制御手段11が次に移動させようとする測定位置が一次コイル3の可動範囲内であるか否かを判定する(SS51)。携帯端末40が、ワイヤレス充電器500の被充電機器配置面の端部に置かれた場合、測定位置の一部が、ワイヤレス充電器500の外側の領域にはみ出すことがあるためである。可動判定手段51が、測定位置が可動範囲内でないと判定した場合(SS51N)、コイル制御手段11は、当該測定位置への一次コイル3の移動を行わない。この場合、サブステップSS10に移動して、全ての測定位置で充電効率の測定が終了しているかをチェックする(SS10)。一方、可動判定手段51が、測定位置が可動範囲内であると判定した場合(SS51Y)、コイル制御手段11は、当該測定位置への一次コイル3の移動を行う(SS11)。この場合、実施例4と同様にサブステップSS12以下の動作が実行される。
【0034】
本実施例のワイヤレス充電器500によれば、一次コイル3の可動範囲外に測定位置が存在する場合でも、当該測定位置を除外して他の測定位置のみで異物検出を行うことができる。
【実施例6】
【0035】
次に、実施例5のワイヤレス充電器500に一次コイル3の動作等に関するパラメータを被充電機器から取得する機能を追加した実施例6に係るワイヤレス充電器について図16、図17を参照して詳細に説明する。図16は本実施例に係るワイヤレス充電器600の構成を示すブロック図である。図17は本実施例に係るワイヤレス充電器600の動作を示すフローチャートである。本実施例のワイヤレス充電器600は、位置検出部1と、初期位置調整部2と、一次コイル3と、認証部4と、変復調部5と、充電電力制御部6と、電源部7と、異物検出部60とを備える。異物検出部60は、コイル制御手段11と、効率測定手段12と、測定結果メモリ手段13と、判定手段24と、パラメータメモリ手段15と、更新手段31と、タイマ手段41と、可動判定手段51と、パラメータ取得手段61とを備える。実施例5のワイヤレス充電器500と本実施例のワイヤレス充電器600の相違点は、実施例5のワイヤレス充電器500の異物検出部50が備えていないパラメータ取得手段61が、本実施例のワイヤレス充電器600において追加されている点のみである。従って、実施例5のワイヤレス充電器500と同一番号を付した本実施例のワイヤレス充電器600における各構成部の説明を割愛する。
【0036】
本実施例のワイヤレス充電器600においては、ステップS4(被充電機器認証動作)と同時、又はその後に、パラメータ取得手段61が被充電機器が保有するパラメータを二次コイル50、一次コイル3、変復調部5を介して取得して(SS61)、当該取得したパラメータをパラメータメモリ手段15に記憶する。前述したように、パラメータとは、コイル制御手段11が一次コイル3の制御に用いる測定位置の座標情報や、判定手段24が用いる閾値、タイマ手段41が用いるタイマ開始からタイマ満了までの時間情報、等である。
【0037】
本実施例のワイヤレス充電器600によれば、パラメータ取得手段61が被充電機器側で設定、更新したパラメータを取得して、当該取得したパラメータをパラメータメモリ手段15に記憶するため、パラメータの設定、変更、更新を被充電機器側で行うことができ、ユーザの利便性が高まる。
【特許請求の範囲】
【請求項1】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記何れかの測定方向における前記初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における前記初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項2】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記何れかの円周上における前記何れかの測定位置における充電効率と同一円周上の他の測定位置における充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項3】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の1以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記測定位置毎に基準充電効率を記憶する測定結果メモリ手段と、
前記何れかの測定位置における充電効率と前記測定結果メモリ手段に記憶された同一測定位置の基準充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項4】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた1以上の位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記測定位置毎に基準充電効率を記憶する測定結果メモリ手段と、
前記何れかの測定位置における充電効率と前記測定結果メモリ手段に記憶された同一測定位置の基準充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項5】
請求項3または4に記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定された充電効率に基づいて前記測定結果メモリ手段に記憶された基準充電効率を更新する更新手段
をさらに備えることを特徴とするワイヤレス充電器。
【請求項6】
請求項1から5の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
一定時刻毎にコイル制御命令を発信するタイマ
をさらに備え、
前記コイル制御手段は、前記コイル制御命令を取得した場合に前記一次コイルを測定位置に順次移動させること
を特徴とするワイヤレス充電器。
【請求項7】
請求項1から6の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定位置が前記一次コイルの可動範囲内であるか否かを判定する可動判定手段をさらに備え、
前記コイル制御手段は、前記可動判定手段が可動範囲内でないと判定した測定位置への前記一次コイルの移動を中止すること
を特徴とするワイヤレス充電器。
【請求項8】
請求項1から7の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定位置、前記閾値を指定するパラメータを前記被充電機器から取得するパラメータ取得手段を
さらに備えることを特徴とするワイヤレス充電器。
【請求項9】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器上の異物を検出する異物検出方法であって、
被充電機器内のコイル(以下、二次コイルという)の位置を検出する位置検出ステップと、
前記二次コイルと電磁誘導で結合され、前記二次コイルに誘導電流を送信するワイヤレス充電器内のコイル(以下、一次コイルという)の軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整ステップと、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御ステップと、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御サブステップと、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定サブステップと、
前記何れかの測定方向における前記初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における前記初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電停止命令を送信する判定サブステップと、
を備える異物検出ステップと、
を備えることを特徴とする異物検出方法。
【請求項10】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器上の異物を検出する異物検出方法であって、
被充電機器内のコイル(以下、二次コイルという)の位置を検出する位置検出ステップと、
前記二次コイルと電磁誘導で結合され、前記二次コイルに誘導電流を送信するワイヤレス充電器内のコイル(以下、一次コイルという)の軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整ステップと、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御ステップと、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、測定位置という)に順次移動するコイル制御サブステップと、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定サブステップと、
前記何れかの円周上における前記何れかの測定位置における充電効率と同一円周上の他の測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電停止命令を送信する判定サブステップと、
を備える異物検出ステップと、
を備えることを特徴とする異物検出方法。
【請求項1】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記何れかの測定方向における前記初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における前記初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項2】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記何れかの円周上における前記何れかの測定位置における充電効率と同一円周上の他の測定位置における充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項3】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の1以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記測定位置毎に基準充電効率を記憶する測定結果メモリ手段と、
前記何れかの測定位置における充電効率と前記測定結果メモリ手段に記憶された同一測定位置の基準充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項4】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器であって、
前記被充電機器内のコイル(以下、二次コイルという)と電磁誘導で結合され、前記二次コイルに誘導電流を送信するコイル(以下、一次コイルという)と、
前記二次コイルの位置を検出する位置検出部と、
前記一次コイルの軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整部と、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御部と、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた1以上の位置(以下、測定位置という)に順次移動するコイル制御手段と、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定手段と、
前記測定位置毎に基準充電効率を記憶する測定結果メモリ手段と、
前記何れかの測定位置における充電効率と前記測定結果メモリ手段に記憶された同一測定位置の基準充電効率との差分が予め定めた閾値以上となる場合には前記充電電力制御部に充電停止命令を送信する判定手段と、
を備える異物検出部と、
を備えることを特徴とするワイヤレス充電器。
【請求項5】
請求項3または4に記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定された充電効率に基づいて前記測定結果メモリ手段に記憶された基準充電効率を更新する更新手段
をさらに備えることを特徴とするワイヤレス充電器。
【請求項6】
請求項1から5の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
一定時刻毎にコイル制御命令を発信するタイマ
をさらに備え、
前記コイル制御手段は、前記コイル制御命令を取得した場合に前記一次コイルを測定位置に順次移動させること
を特徴とするワイヤレス充電器。
【請求項7】
請求項1から6の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定位置が前記一次コイルの可動範囲内であるか否かを判定する可動判定手段をさらに備え、
前記コイル制御手段は、前記可動判定手段が可動範囲内でないと判定した測定位置への前記一次コイルの移動を中止すること
を特徴とするワイヤレス充電器。
【請求項8】
請求項1から7の何れかに記載のワイヤレス充電器であって、
前記異物検出部が、
前記測定位置、前記閾値を指定するパラメータを前記被充電機器から取得するパラメータ取得手段を
さらに備えることを特徴とするワイヤレス充電器。
【請求項9】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器上の異物を検出する異物検出方法であって、
被充電機器内のコイル(以下、二次コイルという)の位置を検出する位置検出ステップと、
前記二次コイルと電磁誘導で結合され、前記二次コイルに誘導電流を送信するワイヤレス充電器内のコイル(以下、一次コイルという)の軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整ステップと、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御ステップと、
前記一次コイルを、前記初期位置を基準として前記一次コイルの軸心と垂直な平面内の2以上の方向(以下、測定方向という)毎に前記初期位置から所定の間隔ずつ離れた位置(以下、測定位置という)に順次移動するコイル制御サブステップと、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定サブステップと、
前記何れかの測定方向における前記初期位置から何れかの距離離れた測定位置における充電効率と他の測定方向における前記初期位置から同一距離離れた測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電停止命令を送信する判定サブステップと、
を備える異物検出ステップと、
を備えることを特徴とする異物検出方法。
【請求項10】
相互誘導による誘導起電力によって、被充電機器のバッテリを充電するワイヤレス充電器上の異物を検出する異物検出方法であって、
被充電機器内のコイル(以下、二次コイルという)の位置を検出する位置検出ステップと、
前記二次コイルと電磁誘導で結合され、前記二次コイルに誘導電流を送信するワイヤレス充電器内のコイル(以下、一次コイルという)の軸心と、前記二次コイルの軸心とが一致する位置(以下、初期位置という)に前記一次コイルの位置を調整する初期位置調整ステップと、
前記一次コイルへの送電を制御し、充電停止命令を検知した場合に前記一次コイルへの送電を停止する充電電力制御ステップと、
前記一次コイルのコイル中心を、前記一次コイルの軸心と垂直な平面内の前記初期位置におけるコイル中心を中心とした円、もしくは2以上の同心円の円周上の円毎に予め定めた2以上の位置(以下、測定位置という)に順次移動するコイル制御サブステップと、
前記測定位置毎に前記被充電機器の充電効率を測定する効率測定サブステップと、
前記何れかの円周上における前記何れかの測定位置における充電効率と同一円周上の他の測定位置における充電効率との差分が予め定めた閾値以上となる場合には充電停止命令を送信する判定サブステップと、
を備える異物検出ステップと、
を備えることを特徴とする異物検出方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−106427(P2013−106427A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248275(P2011−248275)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]