
ワークの冷却装置
【課題】熱処理後のワーク硬さのばらつきや歪を生じず、かつ迅速にワークの冷却を行うことができるワークの冷却装置を提供する。
【解決手段】熱処理後のワークWを載置して冷却させる放冷棚7と、ワークWを個別に前工程から放冷棚7へ搬送し当該放冷棚に互いに離間させて載置するとともに、放冷が完了したワークWを後工程へ搬送するロボットアームと、放冷棚7に載置されてからの経過時間を各ワークW毎に計時して、所定時間経過後に当該ワークWの冷却完了と判定しロボットアームに報知する冷却計時手段とを備えている。
【解決手段】熱処理後のワークWを載置して冷却させる放冷棚7と、ワークWを個別に前工程から放冷棚7へ搬送し当該放冷棚に互いに離間させて載置するとともに、放冷が完了したワークWを後工程へ搬送するロボットアームと、放冷棚7に載置されてからの経過時間を各ワークW毎に計時して、所定時間経過後に当該ワークWの冷却完了と判定しロボットアームに報知する冷却計時手段とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はワークの冷却装置に関し、特に、熱処理後のワークを冷却するための冷却装置に関する。
【背景技術】
【0002】
熱処理したワークを冷却する場合、バッチ処理の場合には容器に製品をバラ積みあるいは整列積載して当該容器ごと熱処理を行ったワークをそのまま容器ごと冷却させている。また、連続処理の場合にはコンベア上にワークをばら積みあるいは整列積載して、コンベア上で熱処理を行ったワークをそのままコンベア上で冷却させている。ここで、特許文献1には、ラックに積層した複数枚の板状ワークをそのままラックごと冷却するようにしたものが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−274952
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の冷却装置では、バッチ処理および連続処理のいずれの場合にもワークが左右上下で重なって積載されるものであるため、その積載位置によって冷却速度が異なり、このため熱処理後のワーク硬さがばらつくという問題がある。また、ワーク同士が重なっているため下方のワークに荷重が印加して歪が生じ、あるいは全てのワークを所定温度まで冷却するのに時間を要するという問題もあった。
【0005】
そこで、本発明はこのような課題を解決するもので、熱処理後のワーク硬さのばらつきや歪を生じず、かつ迅速にワークの冷却を行うことができるワークの冷却装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本第1発明では、熱処理後のワーク(W)を載置して冷却させる冷却棚(7)と、前記ワークを個別に前工程から前記冷却棚(7)へ搬送し当該冷却棚に互いに離間させて載置するとともに、冷却が完了した前記ワーク(W)を後工程へ搬送するハンドリング手段(6)と、前記冷却棚(7)に載置されてからの経過時間を各ワーク(W)毎に計時して、所定時間経過後に当該ワーク(W)の冷却完了と判定し前記ハンドリング手段(6)に報知する冷却計時手段とを備えている。
【0007】
本第1発明においては、ワーク同士を離間させてそれぞれ個別に管理して冷却することができるから、熱処理後のワーク硬さのばらつきや歪を生じることがないとともに、迅速なワークの冷却を行うことが可能である。
【0008】
本第2発明では、前記冷却棚(7)は断熱材(75)上に前記ワーク(W)を載置して放冷させる構成となっている。
【0009】
本第2発明においては、断熱材上にワークを載置して冷却しているから、ワークの載置面が部分的に放冷し急冷される等の問題を生じず、ワークの冷却が均等に行われる。
【0010】
上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0011】
以上のように、本発明のワークの冷却装置によれば、熱処理後のワーク硬さのばらつきや歪を生じず、かつ迅速にワークの冷却を行うことができる。
【図面の簡単な説明】
【0012】
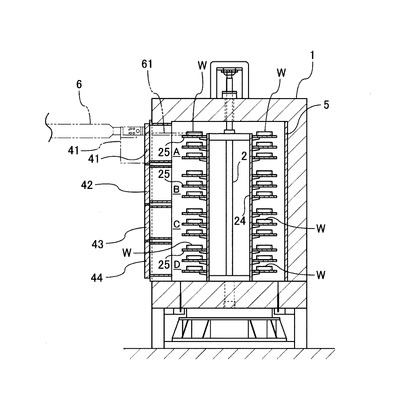
【図1】熱処理装置の垂直断面図である。
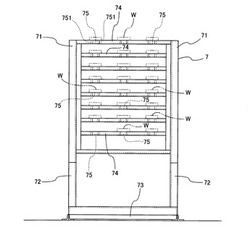
【図2】放冷棚の正面図である。
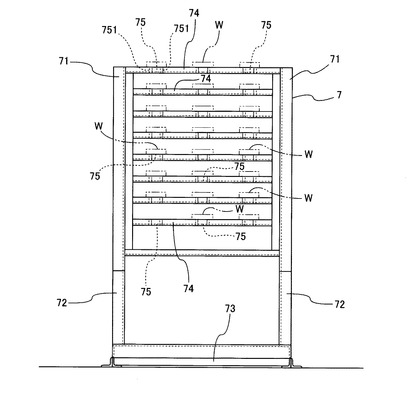
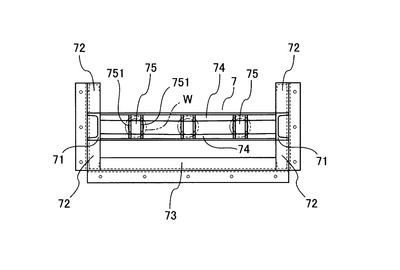
【図3】放冷棚の平面図である。
【図4】水冷槽の正面図である。
【図5】水冷槽の平面図である。
【発明を実施するための形態】
【0013】
図1には本発明の冷却装置の前工程に設けられる熱処理装置の一例を示す。図1において、熱処理装置は閉鎖円筒状の炉体1を備えており、炉体の周壁内周面には加熱ヒータ5が配設されている。炉体1の中心には間欠的に回転させられる回転軸2が設けられている。回転軸2の周囲にはこれに一体に円筒形の支持体24が設けられ、その外周には円環状の棚板25が、上下方向へ三段づつ互いに近接して群A〜Dをなすように設けられている。各棚板25上には周方向へ一定間隔をおいて複数のワークWが互いに離間して水平姿勢で載置されている。これらワークWは本実施形態ではリング状となっている。
【0014】
各ワークWは炉体1内を一周する間に熱処理されて、各群A〜Dに対応して設けられた扉体41〜44に対面する位置に至る。この状態で、扉体41〜44が順次開放され、各扉体41〜44が開いている間にハンドリング手段を構成するロボットアーム6の把持フィンガ61によって各ワークWが炉外へ取り出されて、後述する冷却棚としての放冷棚7(図2)へ搬送される。ワークWが取り出されて空いた棚板25部分には、前工程から新たなワークWが上記ロボットアーム6によって搬送されて来る。
【0015】
このようにして、回転軸2が所定角度回転する毎に扉体41〜44に対面する位置に至ったワークWが、これら扉体41〜44が順次開放されている間に上方位置のものから下方位置のものへ順次炉外へ取り出されて放冷棚7へ送られるとともに、新たなワークWが炉内へ装入される。以上のようなロボットアーム6の作動、および放冷棚7へのワーク載置位置の記憶、さらに各ワークWの冷却時間の計時は、図略のロボット制御盤内のコンピュータで行われる。
【0016】
図2には放冷棚7の正面図を、図3にはその平面図を示す。図2に示すように冷却棚7は左右の柱体71を備えており、各柱体71はその下端部が、前後方向へ斜めに延びる筋交い部材72によって、平面視で略U字形(図3)に成形された基台73の両短辺に固定支持されている。左右の柱体71の間に互いに平行に上下方向へ複数の桟部材74が掛け渡されており、各桟部材74はアングル材(図3)で構成されている。
【0017】
各桟部材74には長手方向の三箇所に間隔をおいて載置台75が設けられており、各載置台75は断熱性に優れる棒状に成型された耐火ブロック751を平行に並設して構成されている。上記熱処理装置から取り出されたワークWはロボットアーム6によって各載置台75の耐火ブロック751上に水平姿勢で載置され、放冷される。この放冷は、各ワークWが互いに積み重なることなく離間した状態で行われるとともに、載置台75は断熱性が確保されているから載置台75に接するワーク載置面(下側面)が急速に冷却される等の問題を生じず、載置されたワークWの放冷が均等に行われる。
【0018】
ロボット制御盤ではワークWを放冷棚7のどの載置台75に載置したかを記憶し、当該ワークWを載置してからの経過時間(すなわち放冷時間)を計時する。この場合、各載置台75の三次元位置は予めロボット制御盤内に記憶されており、ロボットアーム6に設けた位置検出器によって当該アーム6の移動位置が検出されて、所定の載置台75にワークWが搬送され載置されるようになっている。なお、載置台75へのワークWの載置は、上方から順番に各載置台75に行うようにしても良いし、放冷が完了したワークWが取り出されて空になった載置台75に載置するようにしても良い。
【0019】
ある載置台75上のワークWの放冷時間が所定時間を経過した場合には当該ワークWの放冷が完了したものとして、所定時間の経過が上記ロボットアーム6とは異なる、ハンドリング手段を構成する他のロボットアームに報知され、当該ロボットアームが冷却の完了した上記ワークWを掴んで放冷棚7外へ取り出し、放冷棚7に近い位置に設けられた水冷槽8へ搬送する。なお、上記所定時間はワークの形状及び鋼種によって決まるもので、水冷してもその後のワーク硬さへの影響が少なくなるような温度まで放冷される時間とする。
【0020】
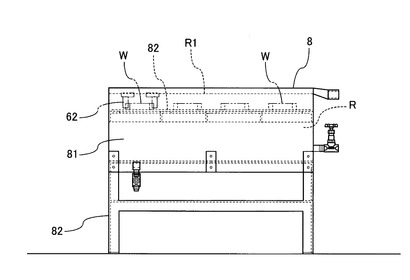
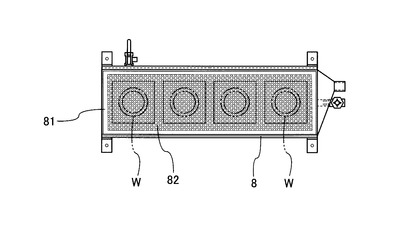
水冷槽8の正面図を図4に、その平面図を図5に示す。水冷槽8は平面視が細長長方形(図5)の槽体81を備えており、当該槽体81がアングル材よりなる脚体82で下方から支持されている(図4)。槽体81内には冷却水Rの水位R1よりも低い所定の高さ位置にパンチングメタルからなる冷却棚としての水冷棚82が水平に配設されており、本実施形態では、上記他のロボットアームの把持フィンガ62(把持フィンガのみを示す)によってワークWを把持して、互いに離間した状態で4個のワークWを並べて水冷棚82上に置いて水冷することができる。
【0021】
ロボット制御盤ではワークWを水冷棚82のどの位置に載置したかを記憶し、ワークWを載置してからの経過時間(すなわち水冷時間)を計時する。この場合、水冷棚82の各載置箇所の三次元位置は予めロボット制御盤内に記憶されており、上記他のロボットアームに設けた位置検出器によって当該アームの移動位置が検出されて、所定の載置箇所にワークWが搬送されて浸水載置されるようになっている。なお、水冷棚82へのワークWの載置は、左右方向へ順番に行うようにしても良いし、水冷が完了したワークWが取り出されて空になった箇所に新たなワークWを載置するようにしても良い。水冷を終えたワークWは再び上記他のロボットアームの把持フィンガ62に把持されて後工程に搬送される。
【0022】
以上のように、本実施形態の冷却装置によれば、ワーク同士を離間させてそれぞれ個別に管理して冷却することができるから、熱処理後のワーク硬さのばらつきや歪を生じることがないとともに、迅速なワークの冷却を行うことが可能である。なお、水冷を行った方が全体の冷却時間を短くできる点で有利であるが、放冷のみで短時間で十分温度が下がる場合には特に水冷を行う必要は無い。また、水冷が比較的短時間で終了する場合には特に水冷時間を計時する必要は無い。上記実施形態では、熱処理後のワークを自然放冷しているが、強制冷却してももちろん良い。
【符号の説明】
【0023】
6…ロボットアーム(ハンドリング手段)、7…放冷棚(冷却棚)、75…載置台(断熱材)、W…ワーク。
【技術分野】
【0001】
本発明はワークの冷却装置に関し、特に、熱処理後のワークを冷却するための冷却装置に関する。
【背景技術】
【0002】
熱処理したワークを冷却する場合、バッチ処理の場合には容器に製品をバラ積みあるいは整列積載して当該容器ごと熱処理を行ったワークをそのまま容器ごと冷却させている。また、連続処理の場合にはコンベア上にワークをばら積みあるいは整列積載して、コンベア上で熱処理を行ったワークをそのままコンベア上で冷却させている。ここで、特許文献1には、ラックに積層した複数枚の板状ワークをそのままラックごと冷却するようにしたものが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−274952
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の冷却装置では、バッチ処理および連続処理のいずれの場合にもワークが左右上下で重なって積載されるものであるため、その積載位置によって冷却速度が異なり、このため熱処理後のワーク硬さがばらつくという問題がある。また、ワーク同士が重なっているため下方のワークに荷重が印加して歪が生じ、あるいは全てのワークを所定温度まで冷却するのに時間を要するという問題もあった。
【0005】
そこで、本発明はこのような課題を解決するもので、熱処理後のワーク硬さのばらつきや歪を生じず、かつ迅速にワークの冷却を行うことができるワークの冷却装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本第1発明では、熱処理後のワーク(W)を載置して冷却させる冷却棚(7)と、前記ワークを個別に前工程から前記冷却棚(7)へ搬送し当該冷却棚に互いに離間させて載置するとともに、冷却が完了した前記ワーク(W)を後工程へ搬送するハンドリング手段(6)と、前記冷却棚(7)に載置されてからの経過時間を各ワーク(W)毎に計時して、所定時間経過後に当該ワーク(W)の冷却完了と判定し前記ハンドリング手段(6)に報知する冷却計時手段とを備えている。
【0007】
本第1発明においては、ワーク同士を離間させてそれぞれ個別に管理して冷却することができるから、熱処理後のワーク硬さのばらつきや歪を生じることがないとともに、迅速なワークの冷却を行うことが可能である。
【0008】
本第2発明では、前記冷却棚(7)は断熱材(75)上に前記ワーク(W)を載置して放冷させる構成となっている。
【0009】
本第2発明においては、断熱材上にワークを載置して冷却しているから、ワークの載置面が部分的に放冷し急冷される等の問題を生じず、ワークの冷却が均等に行われる。
【0010】
上記カッコ内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0011】
以上のように、本発明のワークの冷却装置によれば、熱処理後のワーク硬さのばらつきや歪を生じず、かつ迅速にワークの冷却を行うことができる。
【図面の簡単な説明】
【0012】
【図1】熱処理装置の垂直断面図である。
【図2】放冷棚の正面図である。
【図3】放冷棚の平面図である。
【図4】水冷槽の正面図である。
【図5】水冷槽の平面図である。
【発明を実施するための形態】
【0013】
図1には本発明の冷却装置の前工程に設けられる熱処理装置の一例を示す。図1において、熱処理装置は閉鎖円筒状の炉体1を備えており、炉体の周壁内周面には加熱ヒータ5が配設されている。炉体1の中心には間欠的に回転させられる回転軸2が設けられている。回転軸2の周囲にはこれに一体に円筒形の支持体24が設けられ、その外周には円環状の棚板25が、上下方向へ三段づつ互いに近接して群A〜Dをなすように設けられている。各棚板25上には周方向へ一定間隔をおいて複数のワークWが互いに離間して水平姿勢で載置されている。これらワークWは本実施形態ではリング状となっている。
【0014】
各ワークWは炉体1内を一周する間に熱処理されて、各群A〜Dに対応して設けられた扉体41〜44に対面する位置に至る。この状態で、扉体41〜44が順次開放され、各扉体41〜44が開いている間にハンドリング手段を構成するロボットアーム6の把持フィンガ61によって各ワークWが炉外へ取り出されて、後述する冷却棚としての放冷棚7(図2)へ搬送される。ワークWが取り出されて空いた棚板25部分には、前工程から新たなワークWが上記ロボットアーム6によって搬送されて来る。
【0015】
このようにして、回転軸2が所定角度回転する毎に扉体41〜44に対面する位置に至ったワークWが、これら扉体41〜44が順次開放されている間に上方位置のものから下方位置のものへ順次炉外へ取り出されて放冷棚7へ送られるとともに、新たなワークWが炉内へ装入される。以上のようなロボットアーム6の作動、および放冷棚7へのワーク載置位置の記憶、さらに各ワークWの冷却時間の計時は、図略のロボット制御盤内のコンピュータで行われる。
【0016】
図2には放冷棚7の正面図を、図3にはその平面図を示す。図2に示すように冷却棚7は左右の柱体71を備えており、各柱体71はその下端部が、前後方向へ斜めに延びる筋交い部材72によって、平面視で略U字形(図3)に成形された基台73の両短辺に固定支持されている。左右の柱体71の間に互いに平行に上下方向へ複数の桟部材74が掛け渡されており、各桟部材74はアングル材(図3)で構成されている。
【0017】
各桟部材74には長手方向の三箇所に間隔をおいて載置台75が設けられており、各載置台75は断熱性に優れる棒状に成型された耐火ブロック751を平行に並設して構成されている。上記熱処理装置から取り出されたワークWはロボットアーム6によって各載置台75の耐火ブロック751上に水平姿勢で載置され、放冷される。この放冷は、各ワークWが互いに積み重なることなく離間した状態で行われるとともに、載置台75は断熱性が確保されているから載置台75に接するワーク載置面(下側面)が急速に冷却される等の問題を生じず、載置されたワークWの放冷が均等に行われる。
【0018】
ロボット制御盤ではワークWを放冷棚7のどの載置台75に載置したかを記憶し、当該ワークWを載置してからの経過時間(すなわち放冷時間)を計時する。この場合、各載置台75の三次元位置は予めロボット制御盤内に記憶されており、ロボットアーム6に設けた位置検出器によって当該アーム6の移動位置が検出されて、所定の載置台75にワークWが搬送され載置されるようになっている。なお、載置台75へのワークWの載置は、上方から順番に各載置台75に行うようにしても良いし、放冷が完了したワークWが取り出されて空になった載置台75に載置するようにしても良い。
【0019】
ある載置台75上のワークWの放冷時間が所定時間を経過した場合には当該ワークWの放冷が完了したものとして、所定時間の経過が上記ロボットアーム6とは異なる、ハンドリング手段を構成する他のロボットアームに報知され、当該ロボットアームが冷却の完了した上記ワークWを掴んで放冷棚7外へ取り出し、放冷棚7に近い位置に設けられた水冷槽8へ搬送する。なお、上記所定時間はワークの形状及び鋼種によって決まるもので、水冷してもその後のワーク硬さへの影響が少なくなるような温度まで放冷される時間とする。
【0020】
水冷槽8の正面図を図4に、その平面図を図5に示す。水冷槽8は平面視が細長長方形(図5)の槽体81を備えており、当該槽体81がアングル材よりなる脚体82で下方から支持されている(図4)。槽体81内には冷却水Rの水位R1よりも低い所定の高さ位置にパンチングメタルからなる冷却棚としての水冷棚82が水平に配設されており、本実施形態では、上記他のロボットアームの把持フィンガ62(把持フィンガのみを示す)によってワークWを把持して、互いに離間した状態で4個のワークWを並べて水冷棚82上に置いて水冷することができる。
【0021】
ロボット制御盤ではワークWを水冷棚82のどの位置に載置したかを記憶し、ワークWを載置してからの経過時間(すなわち水冷時間)を計時する。この場合、水冷棚82の各載置箇所の三次元位置は予めロボット制御盤内に記憶されており、上記他のロボットアームに設けた位置検出器によって当該アームの移動位置が検出されて、所定の載置箇所にワークWが搬送されて浸水載置されるようになっている。なお、水冷棚82へのワークWの載置は、左右方向へ順番に行うようにしても良いし、水冷が完了したワークWが取り出されて空になった箇所に新たなワークWを載置するようにしても良い。水冷を終えたワークWは再び上記他のロボットアームの把持フィンガ62に把持されて後工程に搬送される。
【0022】
以上のように、本実施形態の冷却装置によれば、ワーク同士を離間させてそれぞれ個別に管理して冷却することができるから、熱処理後のワーク硬さのばらつきや歪を生じることがないとともに、迅速なワークの冷却を行うことが可能である。なお、水冷を行った方が全体の冷却時間を短くできる点で有利であるが、放冷のみで短時間で十分温度が下がる場合には特に水冷を行う必要は無い。また、水冷が比較的短時間で終了する場合には特に水冷時間を計時する必要は無い。上記実施形態では、熱処理後のワークを自然放冷しているが、強制冷却してももちろん良い。
【符号の説明】
【0023】
6…ロボットアーム(ハンドリング手段)、7…放冷棚(冷却棚)、75…載置台(断熱材)、W…ワーク。
【特許請求の範囲】
【請求項1】
熱処理後のワークを載置して冷却させる冷却棚と、前記ワークを個別に前工程から前記冷却棚へ搬送し当該冷却棚に互いに離間させて載置するとともに、冷却が完了した前記ワークを後工程へ搬送するハンドリング手段と、前記冷却棚に載置されてからの経過時間を各ワーク毎に計時して、所定時間経過後に当該ワークの冷却完了と判定し前記ハンドリング手段に報知する冷却計時手段とを備えるワークの冷却装置。
【請求項2】
前記冷却棚は断熱材上に前記ワークを載置して冷却する構成となっている請求項1に記載のワークの冷却装置。
【請求項1】
熱処理後のワークを載置して冷却させる冷却棚と、前記ワークを個別に前工程から前記冷却棚へ搬送し当該冷却棚に互いに離間させて載置するとともに、冷却が完了した前記ワークを後工程へ搬送するハンドリング手段と、前記冷却棚に載置されてからの経過時間を各ワーク毎に計時して、所定時間経過後に当該ワークの冷却完了と判定し前記ハンドリング手段に報知する冷却計時手段とを備えるワークの冷却装置。
【請求項2】
前記冷却棚は断熱材上に前記ワークを載置して冷却する構成となっている請求項1に記載のワークの冷却装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−96643(P2013−96643A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−240030(P2011−240030)
【出願日】平成23年11月1日(2011.11.1)
【出願人】(000003713)大同特殊鋼株式会社 (916)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月1日(2011.11.1)
【出願人】(000003713)大同特殊鋼株式会社 (916)
【Fターム(参考)】
[ Back to top ]