
ワークストッカ
【課題】前方のワークが取り出された際に、後方のワークを前方へ送って確実に前詰めすることのできるワークストッカを提供する。
【解決手段】ワークストッカを、前端よりも後端が高く支持された傾斜路5と、傾斜路5に沿って所定間隔で配されたストッパS1〜SMとを備えたものとし、ストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)を、ワーク検知アーム6とワーク掛止アーム7とで構成した。ストッパSmのワーク検知アーム6が直前のストッパSm−1にワークWが掛止されていることを検知している場合には、ストッパSmのワーク掛止アーム7が後方へ起立して後続のワークWを掛止し、ストッパSmのワーク検知アーム6が直前のストッパSm−1にワークWが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アーム7が前方へ倒伏して後続のワークWを通過させる。
【解決手段】ワークストッカを、前端よりも後端が高く支持された傾斜路5と、傾斜路5に沿って所定間隔で配されたストッパS1〜SMとを備えたものとし、ストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)を、ワーク検知アーム6とワーク掛止アーム7とで構成した。ストッパSmのワーク検知アーム6が直前のストッパSm−1にワークWが掛止されていることを検知している場合には、ストッパSmのワーク掛止アーム7が後方へ起立して後続のワークWを掛止し、ストッパSmのワーク検知アーム6が直前のストッパSm−1にワークWが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アーム7が前方へ倒伏して後続のワークWを通過させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のワークを前後に並べてストックすることが可能であり、前方のワークが取り出されたときには、後方のワークを前方へ送って前詰めすることのできるワークストッカに関する。
【背景技術】
【0002】
生産工場などでは、異なる工程間でのワークの受け渡しを遅滞なく行って生産効率を向上させることができるように、次の工程へと移送されるワークをワークストッカと呼ばれる装置にストックすることが行われている。ワークストッカは、ワークの形態などに応じて様々な種類のものが存在するが、例えば、複数のワークを前後に並べてストックし、前方のワークが取り出されたときに、後方のワークを前方へ送って前詰めするようにしたワークストッカなどが知られている。
【0003】
なかでも、圧延ロールなど、全体が円筒状に形成されたワークや、クランクシャフトなど、全体が円筒状でなくてもその一部の区間が円筒状に形成されたワークに対しては、傾斜路を利用してワークを前方へ送るようにしたワークストッカ(例えば、特許文献1を参照。)が用いられることがある。この種のワークストッカでは、傾斜路を後方から転がってくる複数のワークが、傾斜路の前端側から順に前詰めされながらストックされるようになっている。
【0004】
傾斜路を利用したワークストッカは、ワークの自重による転がりを利用してワークを送るものであったため、ワークを送る際に動力を要しないという利点を有していた。しかしその一方で、この種のワークストッカには、
(1)傾斜路を転がってきたワークがその直前にストックされている別のワークに衝突するため、ワークが傷つくおそれがある、
(2)前方でストックされているワークに、後方でストックされている全てのワークの荷重がかかるため、ワークを取り出しにくい、
などの欠点があった。
【0005】
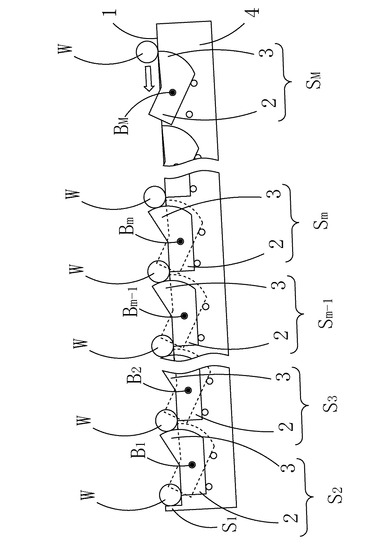
このような実状に鑑みてか、これまでには、図9に示すように、複数のストッパS1〜SM(Mは、ストッパの総数であり、2以上の任意の整数。)を傾斜路1に沿って所定間隔で配し、傾斜路1を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMに順次掛止させるようにしたワークストッカが提案されている。
【0006】
図9に示すワークストッカにおいて、ストッパSm(mは、2以上、M以下の全ての整数。)には、直前のストッパSm−1に掛止されているワークWの荷重を受けるためのワーク受け部2と、そのワークWよりも1つ後ろの別のワークWを掛止するためのワーク掛止部3とが備えられている。
【0007】
ストッパSmは、回動中心点Bmで支持躯体4に対して軸支されており、回動中心点Bmを中心として回動することができるようになっている。回動中心点Bmは、ストッパSmの重心点よりも前寄りに設けられている。このため、ワークWがストッパSmに外力を加えていない状態にあっては、ストッパSmは、その後側部分(ワーク掛止部3)が自重によって下方へ自然に沈み込み、その前側部分(ワーク受け部2)が上方へ浮き上がるようになっている(図9の破線を参照)。
【0008】
ストッパSmのワーク掛止部3が下方へ沈み込み、その全体が傾斜路1の上面よりも下方に隠れると、傾斜路1を後方から転がってくるワークWは、ストッパSmのワーク掛止部3に引っ掛かることなく、傾斜路1を前方へ転がっていくことが可能になる。ストッパSmのワーク掛止部3を通過したワークWは、傾斜路1の上面から浮き出ているストッパSmのワーク受け部2を下方へ押し下げながらワーク受け部2を通過し、傾斜路1を前方へ転がっていく。ワークWがストッパSmのワーク受け部2を通過すると、ストッパSmのワーク掛止部3が再び下方へ沈み込み、ストッパSmのワーク受け部2が上方へ浮き上がる。
【0009】
ただし、直前のストッパSm−1のワーク掛止部3が傾斜路1の上面から浮き出ている場合には、ワークWはストッパSm−1のワーク掛止部3に引っ掛かって止まる。このとき、ストッパSmのワーク受け部2は、ストッパSm−1のワーク掛止部3に引っ掛かったワークWによって下方へ押し下げられたままとなっており、ストッパSmのワーク掛止部3は、傾斜路1の上面から浮き出たままの状態となっている。この状態にあっては、傾斜路1を後方から転がってくるワークWは、ストッパSmのワーク掛止部3を通過することができず、ストッパSmのワーク掛止部3に引っ掛かって止まる。
【0010】
このように、図9に示すワークストッカのストッパSmは、そのワーク受け部2がワークWによって押し下げられている場合には、ワーク掛止部3が傾斜路1を遮り、そのワーク受け部2がワークWによって押し下げられていない場合には、ワーク掛止部3が傾斜路1を遮ることのないようになっている。
【0011】
図9に示すワークストッカは、傾斜路1を後方から転がってくる複数のワークWを所定間隔を隔てた状態でストックすることができるものとなっており、
(1)傾斜路を転がってきたワークがその直前にストックされている別のワークに衝突することがなく、ワークWが傷つくのを防ぐことができる、
(2)前方でストックされているワークには、後方でストックされているワークの荷重がかからず、ワークを取り出しやすい、
などの利点を有していた。
【0012】
ところがその一方で、図9に示すワークストッカは、ストッパSm−1及びストッパSmの両方のワーク掛止部3にワークWが掛止されていた状態から、ストッパSm−1のワーク掛止部3に掛止されていたワークWが前方へ移動し、ストッパSmのワーク受け部2にワークWの荷重がかからなくなった場合であっても、ストッパSmのワーク掛止部3が下方へ沈み込まず、ストッパSmのワーク掛止部3にワークWが掛止されたままの状態になりやすいという欠点を有していた。
【0013】
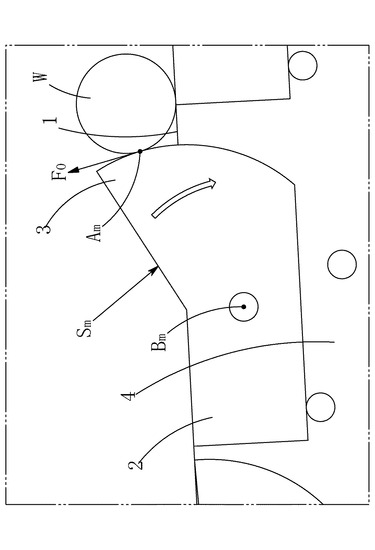
というのも、図9に示すワークストッカでは、ストッパSmのワーク受け部2の上方からワークWが前方へ移動した後には、図10に示すように、ストッパSmが回動中心点Bmを中心として白抜矢印の向きに回動しようとするが、このときのワーク掛止部3におけるワーク接触点Amには、ワーク掛止部3が移動しようとする向き(下向き)とは逆向き(上向き)の摩擦力F0が働くからである。
【0014】
このような実状に鑑みてか、これまでには、ストッパSmのワーク掛止部3におけるワーク接触点Am周辺をローラ(図示省略)とすることにより、ワークWからワーク掛止部3に加えられる摩擦力F0が小さくなるようにしたワークストッカ(例えば、特許文献2と特許文献3を参照。)も提案されている。しかし、この場合には、前記ローラを滑らかに回転させる必要があったため、前記ローラの回転軸の調整などに手間を要し、ワークストッカの製造コストが増大するおそれがあった。
【0015】
また、ワーク掛止部3にローラを用いたワークストッカでは、最初のうちは前記ローラが滑らかに回転していたとしても、前記ローラにワークWが衝突を繰り返すうちにその回転軸がぶれてしまい、前記ローラが滑らかに回転しなくなるおそれもあった。このため、前記ローラの点検や交換を定期的に行う必要があるなど、ワークストッカのメンテナンスコストが増大するおそれもあった。
【0016】
さらに、前記ローラの有無にかかわらず、図9に示すワークストッカでは、ストッパSmを安定して動作させようとすると、ストッパSmの前後方向に亘る長さをある程度長くする必要があった。このため、図9に示すワークストッカには、複数のワークを狭いピッチでストックすることが困難であり、多数のワークWをストックしようとすると、広い面積が必要になるという欠点があった。
【0017】
【特許文献1】実開昭56−107724号公報
【特許文献2】実開平04−135518号公報
【特許文献3】特開平05−008853号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明は、上記課題を解決するためになされたものであり、前方のワークが取り出された際に、後方のワークを前方へ送って確実に前詰めすることのできるワークストッカを提供するものである。また、ワークの間隔を狭くすることが可能で、複数のワークを狭いピッチでストックすることのできるワークストッカを提供することも本発明の目的である。さらに、このワークストッカを、製造コストやメンテナンスコストを増大させることなく提供することも本発明の目的である。
【課題を解決するための手段】
【0019】
上記課題は、
ワークを前方へ送るためのワーク移送路と、ワーク移送路に沿って所定間隔で配された複数のストッパとを備え、ワーク移送路を後方から前方へ送られてくる複数のワークを前詰めしながら前記複数のストッパに順次掛止させていくワークストッカであって、
前から数えて2番目以降のストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)が、直前のストッパSm−1にワークが掛止されているか否かを検知するためのワーク検知アームと、後続のワークを掛止するためのワーク掛止アームとを備え、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知している場合には、ストッパSmのワーク掛止アームが後方へ起立して後続のワークを掛止し、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アームが前方へ倒伏して後続のワークを通過させる
ことを特徴とするワークストッカ
を提供することによって解決される。
【0020】
これにより、ストッパSmのワーク掛止アームが倒伏する向きと、ストッパSmのワーク掛止アームが該ワーク掛止アームに掛止されているワークから受ける力の向きとを略一致させることが可能になる。したがって、ストッパSm−1及びストッパSmの両方のワーク掛止アームにワークが掛止されていた状態から、ストッパSm−1のワーク掛止アームに掛止されていたワークが前方へ移動し、ストッパSmのワーク検知アームがワークから力を受けなくなった場合であっても、ストッパSmのワーク掛止アームを確実に倒伏させることが可能になるので、ワークを確実に前方へ送ることができるようになる。
【0021】
また、ローラなどを用いる必要もないので、ワークストッカの製造コストやメンテナンスコストを抑えることも可能になる。さらに、ストッパSmのワーク検知アームとワーク掛止アームとを一体化させるのではなく別体としたことによって、ワーク検知アームとワーク掛止アームの配置の自由度が高まる。このため、ストッパSmの前後方向に亘る長さを短くすることが可能になり、複数のワークを狭いピッチでストックすることもできるようになる。
【0022】
ところで、「ワーク検知アーム」及び「ワーク掛止アーム」における「アーム」という語は、ワーク検知アームやワーク掛止アームの形態を簡素化すればアーム状にできるという意味で用いており、ワーク検知アームやワーク掛止アームの実際の形態をアーム状に限定するものではない。というのも、ワーク検知アームやワーク掛止アームに、これらをアーム状に見せないような余分な部分(分岐部や平板部など)が存在する場合であっても、ワーク検知アームやワーク掛止アームをアーム状に形成した場合と同様の動作をさせることが可能であるからである。これは、後述する「連結アーム」についても同様である。
【0023】
また、「ストッパSmのワーク掛止アームが後方へ起立して」とは、ストッパSmのワーク掛止アームの先端(ワークWを掛止する側の端部)が前方から後方へ移動する向きに、該ワーク掛止アームがその所定点(後述する回動中心点Bm)を中心として回動することを意味している。これに対し、「ストッパSmのワーク掛止アームが前方へ倒伏して」とは、ストッパSmのワーク掛止アームの先端が後方から前方へ移動する向きに、該ワーク掛止アームがその回動中心点Bmを中心として回動することを意味している。
【0024】
本発明のワークストッカにおいて、ストッパSmにおけるワーク検知アームとワーク掛止アームは、機械的に独立して動作するものであってもよい。しかし、この場合には、ストッパSmのワーク検知アームが検知した結果(ワークWの有無)を、ストッパSmのワーク掛止アームの動作に反映させるために、該ワーク検知アームや該ワーク掛止アームの周辺にスイッチやアクチュエータを配してこれらを電気的に接続するなど、制御機器や配線が必要になり、ワークストッカの製造コストやメンテナンスコストが増大するおそれがある。
【0025】
このため、ストッパSmに、ストッパSmのワーク検知アームとワーク掛止アームとを連結して連動させるための連結アームを設けると好ましい。これにより、制御機器や配線を要することなく、ストッパSmのワーク検知アームが検知した結果(ワークWの有無)を、ストッパSmのワーク掛止アームの動作に反映させることが可能になり、ワークストッカの製造コストやメンテナンスコストを抑えることができる。
【0026】
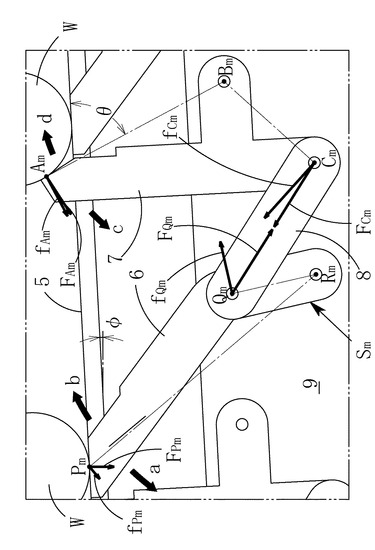
本発明のワークストッカにおいて、ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度(以下において、「角度θ」と表記する。図2を参照。)は、ワーク移送路の水平面に対する傾斜角度などによっても異なり、特に限定されない。しかし、ストッパSmのワーク掛止アームを前方へより倒伏しやすくすることを考慮すると、角度θは、90°以下とすると好ましい。角度θは、85°以下であるとより好ましく、80°以下であるとさらに好ましい。
【0027】
一方、ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度θを小さくしすぎると、ストッパSmのワーク掛止アームにワークWをしっかりと掛止させることができなくなるおそれがある。このため、角度θは、通常、30°以上とされる。角度θは、35°以上であると好ましく、40°以上であるとより好ましく、45°以上であるとさらに好ましい。
【0028】
ここで、「ワーク接触点Am」とは、図2に示すように、ワークストッカを側方(ワーク移送路を横断する方向)から見た場合における、ストッパSmのワーク掛止アーム7とワークWとの接触点のことをいう。該接触点は、通常、ワーク掛止アーム7の起立状態によって変化するが、ここでは、ストッパSmのワーク掛止アーム7がワーク移送路5上に現れてワークWを掛止している場合(通常、ストッパSmのワーク掛止アーム7が最も起立した状態となった場合)における前記接触点をワーク接触点Amとする。ストッパSmのワーク掛止アーム7とワークWとに複数の接触点が存在する場合には、該複数の接触点のうち、前記角度θが最大となる接触点をワーク接触点Amとする。
【0029】
また、「回動中心点Bm」とは、図2に示すように、ワークストッカを側方(ワーク移送路を横断する方向)から見た場合における、ストッパSmのワーク掛止アーム7の回動中心点のことをいう。ストッパSmのワーク掛止アームは、この回動中心点Bmを中心として回動することにより、後方へ起立する動作と前方へ倒伏する動作とを行う。
【0030】
本発明のワークストッカにおいて、ワーク移送路は、ワークを前方へ送ることができるものであれば特に限定されない。ワーク移送路は、動力機構が設けられたもの(例えば、アキューム機構付きのトップローラチェーンなどのコンベア)と、動力機構が設けられていないもの(例えば、前端よりも後端が高く支持された傾斜路)とに大別される。
【0031】
動力機構が設けられたワーク移送路は、その傾斜角度にかかわらず(例えば、ワーク移送路が水平又は後方から前方へ向かって登り坂になっていたとしても)、ワークを前方へ送ることが可能である。このため、ワークの重量がワーク掛止アームにかからないようにすることができる。したがって、ワークストッカを重いワークをストックするのに適したものとすることができる。
【0032】
一方、動力機構が設けられていないワーク移送路は、ワークの移送に動力を要しないため、ワークストッカの省エネルギー化を実現しやすい。また、動力機構が設けられていないワーク移送路は、一般的に、動力機構が設けられたものよりも駆動部を少なくすることができるので、故障が生じにくいだけでなく、メンテナンスも容易である。さらに、ワークストッカのコストを抑えることも可能である。
【発明の効果】
【0033】
以上のように、本発明によって、前方のワークが取り出された際に、後方のワークを前方へ送って確実に前詰めすることのできるワークストッカを提供することが可能になる。また、ワークの間隔を狭くすることが可能で、複数のワークを狭いピッチでストックすることのできるワークストッカを提供することも可能になる。さらに、このワークストッカの製造コストやメンテナンスコストを抑えることも可能になる。
【発明を実施するための最良の形態】
【0034】
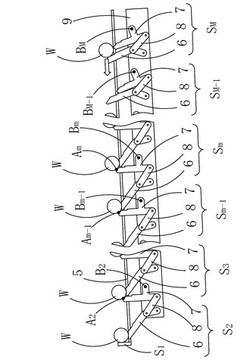
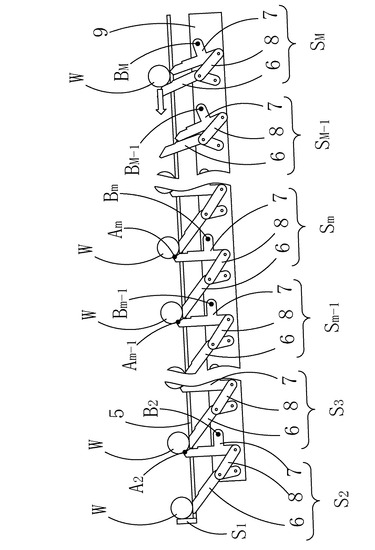
本発明のワークストッカの好適な実施態様について、図面を用いて具体的に説明する。以下においては、ワーク移送路として動力機構を有さない傾斜路(前端よりも後端が高く支持された傾斜路)を利用した場合について説明する。図1は、本発明のワークストッカの要部を示した側面図である。図2は、図1のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。図1と図2においては、紙面に向かって左手側(ストッパS1側)を「前」とし、紙面向かって右手側(ストッパSM側)を「後」としている。
【0035】
本実施態様のワークストッカは、図1に示すように、前端よりも後端が高く支持された傾斜路5と、傾斜路5に沿って所定間隔で配されたM個(Mは、2以上の任意の整数。)のストッパS1〜SMとを備えたものとなっており、傾斜路5を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMで順次掛止していくものとなっている。
【0036】
傾斜路5の水平面に対する傾斜角度(以下において、「角度φ」と表記する。図2を参照。)は、0°よりも大きければ特に限定されない。角度φは、ワークWの転がりやすさ、ワークWの重量、ワークWの傷つきやすさ、ストッパS1〜SMの配置ピッチなどを考慮して適宜決定される。しかし、角度φを小さくしすぎると、ワークWが傾斜路5を前方に転がらなくなるおそれがある。このため、角度φは、通常、1°以上とされる。角度φは、1.5°以上であると好ましく、2°以上であるとより好ましい。
【0037】
一方、角度φを大きくしすぎると、ワークWが傾斜路5を前方へ転がる際の加速度が大きくなり、ワークWがワーク掛止アーム7に速い速度で衝突するようになる。したがって、ワークWやワーク掛止アーム7が傷つきやすくなるおそれがある。また、ワークWがワーク掛止アーム7に接触する際にワーク掛止アーム7がワークWから受ける力が大きくなり、1つ前のストッパに掛止されているワークWが飛び跳ねるおそれもある。このため、角度φは、通常、60°以下とされる。角度φは、45°以下であると好ましく、30°以下であるとより好ましい。
【0038】
ワークWが金属製のクランクシャフトであるなど、ワークWが重く転がりやすい場合には、角度φは、通常、20°以下とされる。この場合における角度φは、15°以下であると好ましく、10°以下であるとより好ましい。本実施態様のワークストッカも、金属製のクランクシャフトをワークWとしてストックするものとなっており、角度φは約3°に設定している。
【0039】
また、ストッパSmのワーク掛止アーム7におけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、ストッパSmのワーク掛止アーム7よりも後方の前記傾斜路とがなす角度θ(図2を参照。)は、角度φによっても異なり、特に限定されないが、既に述べた理由により、通常、30〜90°とされる。本実施態様のワークストッカにおいて、角度θは約65°に設定している。
【0040】
ストッパS1〜SMの個数(Mの値)は、2以上であれば特に限定されない。ストッパS1〜SMの個数は、ワークWの種類や、ワークストッカを設置する工程などを考慮して適宜決定される。しかし、ストッパS1〜SMの個数が少なすぎると、ワークストッカとしての利用価値が低くなってしまう。このため、ストッパS1〜SMの個数は、通常、3個以上とされる。ストッパS1〜SMの個数は、4個以上であると好ましく、5個以上であるとより好ましい。ストッパS1〜SMの個数に上限は特にないが、通常、30個以下とされる。本実施態様のワークストッカにおいて、ストッパS1〜SMの個数は11個となっている。
【0041】
ストッパS1〜SMの配置ピッチは、ワークWの寸法や、ワークストッカの設置に割くことのできる床面積などを考慮して、適宜決定される。床面積を効率的に利用することを考慮すると、ストッパS1〜SMの配置ピッチは、ワークWの最大回転直径(傾斜路5を転がるワークWの各部分のうち、最も大きな円を描いて回転する部分の回転直径)にできるだけ近づけると好ましい。本実施態様のワークストッカは、最大回転直径が20cmのクランクシャフトをワークWとしてストックするものとなっており、そのストッパS1〜SMの配置ピッチは、20cmとしている。
【0042】
M個のストッパS1〜SMのうち、先頭(前から数えて1番目)のストッパS1は、傾斜路5の前端付近から上方へ起立して設けられており、傾斜路5を前方へ転がってきたワークWをしっかりと受け止めることができるようになっている。ワークWが傷つかないようにするために、ストッパS1の後方の面(ワークWと接触する面)には、必要に応じて緩衝材などを貼ることもできる。
【0043】
一方、前から数えて2番目以降のストッパSm(mは、2以上、M以下の全ての整数。)は、いずれも可動構造を有しており、状況に応じてその形態が変化するようになっている。本実施態様のワークストッカにおいて、ストッパSmは、
(1)直前のストッパSm−1にワークWが掛止されているか否かを検知するためのワーク検知アーム6と、
(2)後続のワークWを掛止するためのワーク掛止アーム7と、
(3)ストッパSmのワーク検知アーム6とワーク掛止アーム7とを連結して連動させるための連結アーム8と
を備えたものとなっている。
【0044】
ワーク検知アーム6は、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視ブーメラン状としている。また、ワーク掛止アーム7も、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視「ト」の字状としている。さらに、連結アーム8も、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視直線状としている。ワークWに接触するワーク検知アーム6やワーク掛止アーム7の先端には、ワークWを位置決めすることなどを目的として、切欠きや突起を設けることもできる。
【0045】
図2を参照しながら、ストッパSmについてさらに詳しく説明する。以下においては、「ストッパSmのワーク検知アーム6」を「ワーク検知アーム6」と省略して表記することがある。ストッパSm以外のストッパ(ストッパS1〜Sm−1,Sm+1〜SM)のワーク検知アーム6は、例えば「ストッパSm−1のワーク検知アーム6」というように、その所属を明確に表記する。ワーク掛止アーム7と連結アーム8についても同様である。
【0046】
ストッパSmのワーク検知アーム6は、その基端(下端)近傍の点Rmで支持躯体9に対して軸支されている。このため、ワーク検知アーム6の先端(上端)は、点Rmを中心として矢印a又は矢印bの向きに回動することができるようになっている。
【0047】
また、ストッパSmのワーク掛止アーム7は、その中ほどから後方に突出して設けられた突出部の先端近傍の点Bmで支持躯体9に対して軸支されている。このため、ストッパSmのワーク掛止アーム7の先端は、点Bmを中心として矢印c又は矢印dの向きに回動することができるようになっている。
【0048】
さらに、ストッパSmの連結アーム8は、ワーク検知アーム6における点Rmよりも先端(上端)寄りに設けられた点Qmと、ワーク掛止アーム7における基端(下端)近傍の点Cmとを連結している。連結アーム8は、ワーク検知アーム6に対しては点Qmを中心として、ワーク掛止アーム7に対しては点Cmを中心として、それぞれ回動することができるようになっている。
【0049】
したがって、ストッパSmのワーク検知アーム6の先端(上端)がワークWによって押し下げられ、ワーク検知アーム6が前方へ倒伏(回動中心点Rmを中心として図2の矢印aの向きへ回動)するにしたがい、ワーク検知アーム6における点Qmが前方へと移動し、連結アーム8の前端が前方へ引っ張られるようになっている。このとき、連結アーム8は、その後端がワーク掛止アーム7における点Cmを前方へと引っ張り、ワーク掛止アーム7を後方へ起立(回動中心点Bmを中心として図2の矢印dの向きへ回動)させる。
【0050】
換言すると、ストッパSmのワーク掛止アーム7の先端(上端)がワークWによって押し下げられ、ワーク掛止アーム7が前方へ倒伏(回動中心点Bmを中心として図2の矢印cの向きへ回動)するにしたがい、ワーク掛止アーム7における点Cmが後方へと移動し、連結アーム8の後端が後方へ引っ張られるようになっている。このとき、連結アーム8は、その前端がワーク検知アーム6における点Qmを後方へと引っ張り、ワーク検知アーム6を後方へ起立(回動中心点Rmを中心として図2の矢印bの向きへ回動)させる。
【0051】
ところで、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWと、ストッパSmのワーク掛止アーム7に掛止されているワークWとが静止している図2の状態においては、ワーク掛止アーム7に掛止されているワークWからワーク掛止アーム7の接触点Amに加えられる力FAm(ベクトル量)と、連結アーム8からワーク掛止アーム7の点Cmに加えられる力FCm(ベクトル量)と、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWからストッパSmのワーク検知アーム6の接触点Pmに加えられる力FPm(ベクトル量)と、連結アーム8からワーク検知アーム6の点Qmに加えられる力FQm(ベクトル量)との間に、下記式1〜3で表される関係が成立している。
【0052】
式1 : |fAm|×|BmAm|=|fCm|×|BmCm|
式2 : |fPm|×|RmPm|=|fQm|×|RmQm|
式3 : |FCm|=|FQm|
【0053】
ただし、上記式1〜3においては、ワーク検知アーム6の質量、ワーク掛止アーム7の質量及び連結アーム8の質量を無視している。また、fAm(ベクトル量)は、FAm(ベクトル量)の線分BmAmに垂直な成分である。さらに、fCm(ベクトル量)は、FCm(ベクトル量)の線分BmCmに垂直な成分である。さらにまた、fPm(ベクトル量)は、FPm(ベクトル量)の線分RmPmに垂直な成分である。そして、fQm(ベクトル量)は、FQm(ベクトル量)の線分RmQmに垂直な成分である。
【0054】
ストッパSmのワーク掛止アーム7における接触点AmにワークWが接触する瞬間などには、衝撃により、FAmの大きさが図2で表したものよりも大きくなるが、ワーク検知アーム6の先端がワークWによって押し下げられている限りは、ワーク掛止アーム7が前方へ倒伏することはない。というのも、図2の状態からワーク掛止アーム7が前方へ倒伏しようとすると、ワーク検知アーム6が後方へ起立しようとするが、このとき、それまでは大半が傾斜路5に加えられていた、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWの荷重が、ワーク検知アーム6の接触点Pmに加わるようになる(FPmの大きさが大きくなる)からである。
【0055】
一方、図2の状態から、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されていたワークWが、前方へ転がったり、取り出されたりすることによって、ストッパSmのワーク検知アーム6の上方から移動した場合には、ワーク検知アーム6の後方への起立を妨げるものがなくなるので、ストッパSmのワーク掛止アーム7に掛止されていたワークWの荷重によって、ワーク掛止アーム7が前方へ倒伏するとともに、ワーク検知アーム6が後方へ起立する。
【0056】
このとき、ワーク掛止アーム7に掛止されているワークWからワーク掛止アーム7の接触点Amに加えられる力FAm(ベクトル量)の向きと、ワーク掛止アーム7の先端が移動する向き(図2の矢印cの向き)とが、略一致しているので、ワーク掛止アーム7の接触点Amには大きな摩擦力が働かない。したがって、ワーク掛止アーム7は、スムーズに前方へ倒伏することができる。ストッパSmのワーク掛止アーム7に掛止されていたワークWは、ワーク掛止アーム7を前方へ倒伏させながら、傾斜路5を前方へと転がっていく。
【0057】
ストッパSmのワーク掛止アーム7を前方へ倒伏させながら傾斜路5を前方へ転がっていたワークWは、そのうち、後方へ起立した状態となっているワーク検知アーム6に接触し、ワーク検知アーム6の先端を押し下げながら、ワーク検知アーム6を前方へ倒伏させる。このとき、ワークWは、ストッパSmのワーク掛止アーム7の上方から既に移動しており、ワーク掛止アーム7は、後方へ起立することが可能な状態となっている。
【0058】
このため、傾斜路5を前方へ転がるワークWによって、ワーク検知アーム6が前方へ倒伏するにしたがい、ストッパSmのワーク掛止アーム7が再び後方へ起立する。ワークWがストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されるべき位置に到達すると、ストッパSmのワーク検知アーム6とワーク掛止アーム7は、再び図2の状態へと復帰し、ストッパSmのワーク掛止アーム7は、傾斜路5を後方から転がってくるワークWを掛止することができる状態となる。
【0059】
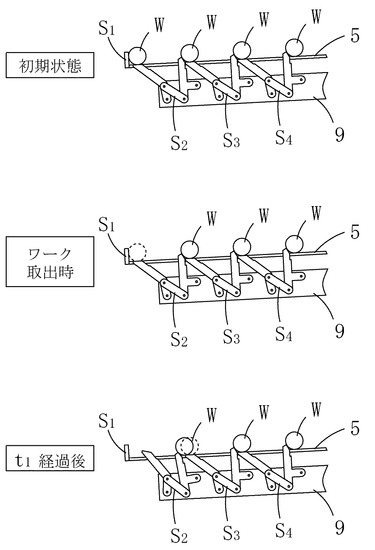
図3〜図8に、本実施態様のワークストッカのストッパS1〜S4のそれぞれにワークWを掛止し、ストッパS1に掛止されていたワークWを取り出した後に、ワークWが前詰めされていく様子を示す。図3〜図8においては、ワークWの直前の位置を破線で示している。
【0060】
図3は、本発明のワークストッカの、ストッパS1〜S4のそれぞれにワークWを掛止させた状態(初期状態)と、ストッパS1に掛止されていたワークWを取り出した瞬間(ワーク取出時)の状態と、ストッパS2に掛止されていたワークWが動き始めた瞬間(ワーク取出時からt1経過後)の状態とを示した側面図である。図3に示すように、ストッパS1に掛止されていたワークWを取り出した直後は、まず、ストッパS2に掛止されていたワークWのみが傾斜路5を前方へ転がり始める。
【0061】
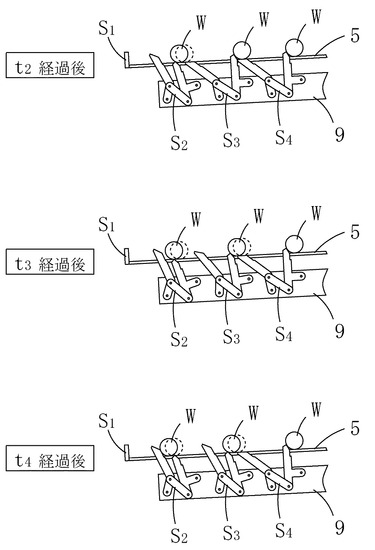
図4は、本発明のワークストッカの、ワーク取出時からt2(>t1)経過後の状態と、ワーク取出時からt3(>t2)経過後の状態と、ワーク取出時からt4(>t3)経過後の状態とを示した側面図である。図4に示すように、ストッパS2に掛止されていたワークWが傾斜路5を前方へ転がり始めてからしばらくすると、続いて、ストッパS3に掛止されていたワークWが傾斜路5を前方へ転がり始める。このとき、ストッパS4に掛止されているワークWは、未だ静止したままの状態となっている。
【0062】
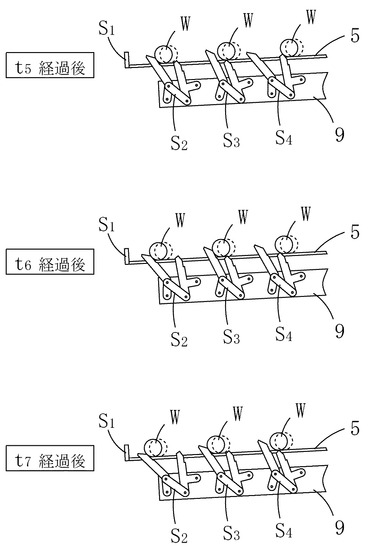
図5は、本発明のワークストッカの、ワーク取出時からt5(>t4)経過後の状態と、ワーク取出時からt6(>t5)経過後の状態と、ワーク取出時からt7(>t6)経過後の状態とを示した側面図である。図5に示すように、ストッパS3に掛止されていたワークWが傾斜路5を前方へ転がり始めてからしばらくすると、続いて、ストッパS4に掛止されていたワークWが傾斜路5を前方へ転がり始める。
【0063】
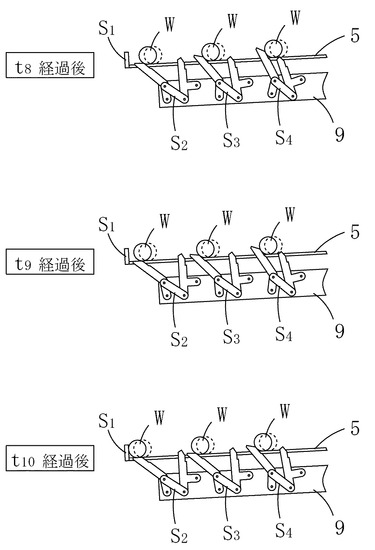
図6は、本発明のワークストッカの、ワーク取出時からt8(>t7)経過後の状態と、ワーク取出時からt9(>t8)経過後の状態と、ワーク取出時からt10(>t9)経過後の状態とを示した側面図である。図6に示すように、傾斜路5を一番早く転がり始めたワークW(初期状態でストッパS2に掛止されていたワークW)が、最初に1つ前のストッパ(ストッパS1)に到達して掛止される。
【0064】
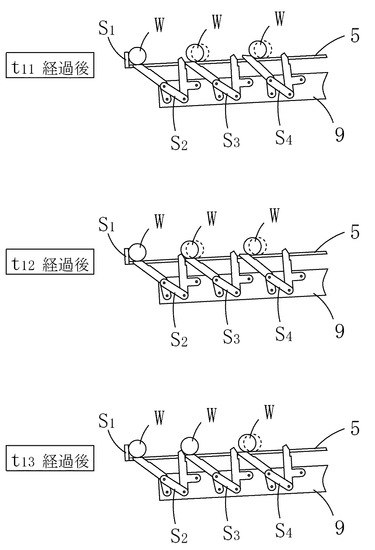
図7は、本発明のワークストッカの、ワーク取出時からt11(>t10)経過後の状態と、ワーク取出時からt12(>t11)経過後の状態と、ワーク取出時からt13(>t12)経過後の状態とを示した側面図である。図7に示すように、傾斜路5を二番目に早く転がり始めたワークW(初期状態でストッパS3に掛止されていたワークW)が、二番目に早く1つ前のストッパ(ストッパS2)に到達して掛止される。
【0065】
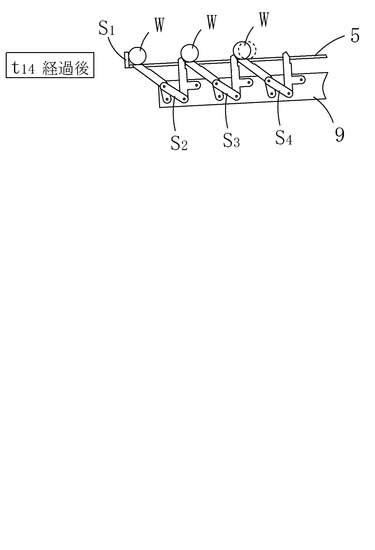
図8は、本発明のワークストッカの、ワーク取出時からt14(>t13)経過後の状態を示した側面図である。図8に示すように、傾斜路5を最後に転がり始めたワークW(初期状態でストッパS4に掛止されていたワークW)が、最後に1つ前のストッパ(ストッパS3)に到達して掛止される。このとき、ワークWは、図3の初期状態から1つずつ前詰めされた状態となっている。
【0066】
このように、本実施態様のワークストッカは、傾斜路5を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMに順次掛止させていくことができるものとなっている。
【0067】
本発明のワークストッカは、ワークWの種類を限定されるものではなく、傾斜路5を転がることが可能な形態を有するワークWに対して幅広く使用することができる。具体的には、圧延ロールなど、全体が円筒状に形成されたワークWや、クランクシャフトなど、全体が円筒状でなくてもその一部の区間が円筒状に形成されたワークWに対して幅広く使用することができる。
【図面の簡単な説明】
【0068】
【図1】本発明のワークストッカの要部を示した側面図である。
【図2】図1のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。
【図3】本発明のワークストッカの、ストッパS1〜S4のそれぞれにワークを掛止させた状態(初期状態)と、ストッパS1に掛止されていたワークを取り出した瞬間(ワーク取出時)の状態と、ストッパS2に掛止されていたワークが動き始めた瞬間(ワーク取出時からt1経過後)の状態とを示した側面図である。
【図4】本発明のワークストッカの、ワーク取出時からt2(>t1)経過後の状態と、ワーク取出時からt3(>t2)経過後の状態と、ワーク取出時からt4(>t3)経過後の状態とを示した側面図である。
【図5】本発明のワークストッカの、ワーク取出時からt5(>t4)経過後の状態と、ワーク取出時からt6(>t5)経過後の状態と、ワーク取出時からt7(>t6)経過後の状態とを示した側面図である。
【図6】本発明のワークストッカの、ワーク取出時からt8(>t7)経過後の状態と、ワーク取出時からt9(>t8)経過後の状態と、ワーク取出時からt10(>t9)経過後の状態とを示した側面図である。
【図7】本発明のワークストッカの、ワーク取出時からt11(>t10)経過後の状態と、ワーク取出時からt12(>t11)経過後の状態と、ワーク取出時からt13(>t12)経過後の状態とを示した側面図である。
【図8】本発明のワークストッカの、ワーク取出時からt14(>t13)経過後の状態を示した側面図である。
【図9】従来のワークストッカの要部を示した側面図である。
【図10】図9のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。
【符号の説明】
【0069】
1 傾斜路
2 ワーク受け部
3 ワーク掛止部
4 支持躯体
5 傾斜路(ワーク移送路)
6 ワーク検知アーム
7 ワーク掛止アーム
8 連結アーム
9 支持躯体
S1〜SM ストッパ
W ワーク
【技術分野】
【0001】
本発明は、複数のワークを前後に並べてストックすることが可能であり、前方のワークが取り出されたときには、後方のワークを前方へ送って前詰めすることのできるワークストッカに関する。
【背景技術】
【0002】
生産工場などでは、異なる工程間でのワークの受け渡しを遅滞なく行って生産効率を向上させることができるように、次の工程へと移送されるワークをワークストッカと呼ばれる装置にストックすることが行われている。ワークストッカは、ワークの形態などに応じて様々な種類のものが存在するが、例えば、複数のワークを前後に並べてストックし、前方のワークが取り出されたときに、後方のワークを前方へ送って前詰めするようにしたワークストッカなどが知られている。
【0003】
なかでも、圧延ロールなど、全体が円筒状に形成されたワークや、クランクシャフトなど、全体が円筒状でなくてもその一部の区間が円筒状に形成されたワークに対しては、傾斜路を利用してワークを前方へ送るようにしたワークストッカ(例えば、特許文献1を参照。)が用いられることがある。この種のワークストッカでは、傾斜路を後方から転がってくる複数のワークが、傾斜路の前端側から順に前詰めされながらストックされるようになっている。
【0004】
傾斜路を利用したワークストッカは、ワークの自重による転がりを利用してワークを送るものであったため、ワークを送る際に動力を要しないという利点を有していた。しかしその一方で、この種のワークストッカには、
(1)傾斜路を転がってきたワークがその直前にストックされている別のワークに衝突するため、ワークが傷つくおそれがある、
(2)前方でストックされているワークに、後方でストックされている全てのワークの荷重がかかるため、ワークを取り出しにくい、
などの欠点があった。
【0005】
このような実状に鑑みてか、これまでには、図9に示すように、複数のストッパS1〜SM(Mは、ストッパの総数であり、2以上の任意の整数。)を傾斜路1に沿って所定間隔で配し、傾斜路1を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMに順次掛止させるようにしたワークストッカが提案されている。
【0006】
図9に示すワークストッカにおいて、ストッパSm(mは、2以上、M以下の全ての整数。)には、直前のストッパSm−1に掛止されているワークWの荷重を受けるためのワーク受け部2と、そのワークWよりも1つ後ろの別のワークWを掛止するためのワーク掛止部3とが備えられている。
【0007】
ストッパSmは、回動中心点Bmで支持躯体4に対して軸支されており、回動中心点Bmを中心として回動することができるようになっている。回動中心点Bmは、ストッパSmの重心点よりも前寄りに設けられている。このため、ワークWがストッパSmに外力を加えていない状態にあっては、ストッパSmは、その後側部分(ワーク掛止部3)が自重によって下方へ自然に沈み込み、その前側部分(ワーク受け部2)が上方へ浮き上がるようになっている(図9の破線を参照)。
【0008】
ストッパSmのワーク掛止部3が下方へ沈み込み、その全体が傾斜路1の上面よりも下方に隠れると、傾斜路1を後方から転がってくるワークWは、ストッパSmのワーク掛止部3に引っ掛かることなく、傾斜路1を前方へ転がっていくことが可能になる。ストッパSmのワーク掛止部3を通過したワークWは、傾斜路1の上面から浮き出ているストッパSmのワーク受け部2を下方へ押し下げながらワーク受け部2を通過し、傾斜路1を前方へ転がっていく。ワークWがストッパSmのワーク受け部2を通過すると、ストッパSmのワーク掛止部3が再び下方へ沈み込み、ストッパSmのワーク受け部2が上方へ浮き上がる。
【0009】
ただし、直前のストッパSm−1のワーク掛止部3が傾斜路1の上面から浮き出ている場合には、ワークWはストッパSm−1のワーク掛止部3に引っ掛かって止まる。このとき、ストッパSmのワーク受け部2は、ストッパSm−1のワーク掛止部3に引っ掛かったワークWによって下方へ押し下げられたままとなっており、ストッパSmのワーク掛止部3は、傾斜路1の上面から浮き出たままの状態となっている。この状態にあっては、傾斜路1を後方から転がってくるワークWは、ストッパSmのワーク掛止部3を通過することができず、ストッパSmのワーク掛止部3に引っ掛かって止まる。
【0010】
このように、図9に示すワークストッカのストッパSmは、そのワーク受け部2がワークWによって押し下げられている場合には、ワーク掛止部3が傾斜路1を遮り、そのワーク受け部2がワークWによって押し下げられていない場合には、ワーク掛止部3が傾斜路1を遮ることのないようになっている。
【0011】
図9に示すワークストッカは、傾斜路1を後方から転がってくる複数のワークWを所定間隔を隔てた状態でストックすることができるものとなっており、
(1)傾斜路を転がってきたワークがその直前にストックされている別のワークに衝突することがなく、ワークWが傷つくのを防ぐことができる、
(2)前方でストックされているワークには、後方でストックされているワークの荷重がかからず、ワークを取り出しやすい、
などの利点を有していた。
【0012】
ところがその一方で、図9に示すワークストッカは、ストッパSm−1及びストッパSmの両方のワーク掛止部3にワークWが掛止されていた状態から、ストッパSm−1のワーク掛止部3に掛止されていたワークWが前方へ移動し、ストッパSmのワーク受け部2にワークWの荷重がかからなくなった場合であっても、ストッパSmのワーク掛止部3が下方へ沈み込まず、ストッパSmのワーク掛止部3にワークWが掛止されたままの状態になりやすいという欠点を有していた。
【0013】
というのも、図9に示すワークストッカでは、ストッパSmのワーク受け部2の上方からワークWが前方へ移動した後には、図10に示すように、ストッパSmが回動中心点Bmを中心として白抜矢印の向きに回動しようとするが、このときのワーク掛止部3におけるワーク接触点Amには、ワーク掛止部3が移動しようとする向き(下向き)とは逆向き(上向き)の摩擦力F0が働くからである。
【0014】
このような実状に鑑みてか、これまでには、ストッパSmのワーク掛止部3におけるワーク接触点Am周辺をローラ(図示省略)とすることにより、ワークWからワーク掛止部3に加えられる摩擦力F0が小さくなるようにしたワークストッカ(例えば、特許文献2と特許文献3を参照。)も提案されている。しかし、この場合には、前記ローラを滑らかに回転させる必要があったため、前記ローラの回転軸の調整などに手間を要し、ワークストッカの製造コストが増大するおそれがあった。
【0015】
また、ワーク掛止部3にローラを用いたワークストッカでは、最初のうちは前記ローラが滑らかに回転していたとしても、前記ローラにワークWが衝突を繰り返すうちにその回転軸がぶれてしまい、前記ローラが滑らかに回転しなくなるおそれもあった。このため、前記ローラの点検や交換を定期的に行う必要があるなど、ワークストッカのメンテナンスコストが増大するおそれもあった。
【0016】
さらに、前記ローラの有無にかかわらず、図9に示すワークストッカでは、ストッパSmを安定して動作させようとすると、ストッパSmの前後方向に亘る長さをある程度長くする必要があった。このため、図9に示すワークストッカには、複数のワークを狭いピッチでストックすることが困難であり、多数のワークWをストックしようとすると、広い面積が必要になるという欠点があった。
【0017】
【特許文献1】実開昭56−107724号公報
【特許文献2】実開平04−135518号公報
【特許文献3】特開平05−008853号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
本発明は、上記課題を解決するためになされたものであり、前方のワークが取り出された際に、後方のワークを前方へ送って確実に前詰めすることのできるワークストッカを提供するものである。また、ワークの間隔を狭くすることが可能で、複数のワークを狭いピッチでストックすることのできるワークストッカを提供することも本発明の目的である。さらに、このワークストッカを、製造コストやメンテナンスコストを増大させることなく提供することも本発明の目的である。
【課題を解決するための手段】
【0019】
上記課題は、
ワークを前方へ送るためのワーク移送路と、ワーク移送路に沿って所定間隔で配された複数のストッパとを備え、ワーク移送路を後方から前方へ送られてくる複数のワークを前詰めしながら前記複数のストッパに順次掛止させていくワークストッカであって、
前から数えて2番目以降のストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)が、直前のストッパSm−1にワークが掛止されているか否かを検知するためのワーク検知アームと、後続のワークを掛止するためのワーク掛止アームとを備え、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知している場合には、ストッパSmのワーク掛止アームが後方へ起立して後続のワークを掛止し、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アームが前方へ倒伏して後続のワークを通過させる
ことを特徴とするワークストッカ
を提供することによって解決される。
【0020】
これにより、ストッパSmのワーク掛止アームが倒伏する向きと、ストッパSmのワーク掛止アームが該ワーク掛止アームに掛止されているワークから受ける力の向きとを略一致させることが可能になる。したがって、ストッパSm−1及びストッパSmの両方のワーク掛止アームにワークが掛止されていた状態から、ストッパSm−1のワーク掛止アームに掛止されていたワークが前方へ移動し、ストッパSmのワーク検知アームがワークから力を受けなくなった場合であっても、ストッパSmのワーク掛止アームを確実に倒伏させることが可能になるので、ワークを確実に前方へ送ることができるようになる。
【0021】
また、ローラなどを用いる必要もないので、ワークストッカの製造コストやメンテナンスコストを抑えることも可能になる。さらに、ストッパSmのワーク検知アームとワーク掛止アームとを一体化させるのではなく別体としたことによって、ワーク検知アームとワーク掛止アームの配置の自由度が高まる。このため、ストッパSmの前後方向に亘る長さを短くすることが可能になり、複数のワークを狭いピッチでストックすることもできるようになる。
【0022】
ところで、「ワーク検知アーム」及び「ワーク掛止アーム」における「アーム」という語は、ワーク検知アームやワーク掛止アームの形態を簡素化すればアーム状にできるという意味で用いており、ワーク検知アームやワーク掛止アームの実際の形態をアーム状に限定するものではない。というのも、ワーク検知アームやワーク掛止アームに、これらをアーム状に見せないような余分な部分(分岐部や平板部など)が存在する場合であっても、ワーク検知アームやワーク掛止アームをアーム状に形成した場合と同様の動作をさせることが可能であるからである。これは、後述する「連結アーム」についても同様である。
【0023】
また、「ストッパSmのワーク掛止アームが後方へ起立して」とは、ストッパSmのワーク掛止アームの先端(ワークWを掛止する側の端部)が前方から後方へ移動する向きに、該ワーク掛止アームがその所定点(後述する回動中心点Bm)を中心として回動することを意味している。これに対し、「ストッパSmのワーク掛止アームが前方へ倒伏して」とは、ストッパSmのワーク掛止アームの先端が後方から前方へ移動する向きに、該ワーク掛止アームがその回動中心点Bmを中心として回動することを意味している。
【0024】
本発明のワークストッカにおいて、ストッパSmにおけるワーク検知アームとワーク掛止アームは、機械的に独立して動作するものであってもよい。しかし、この場合には、ストッパSmのワーク検知アームが検知した結果(ワークWの有無)を、ストッパSmのワーク掛止アームの動作に反映させるために、該ワーク検知アームや該ワーク掛止アームの周辺にスイッチやアクチュエータを配してこれらを電気的に接続するなど、制御機器や配線が必要になり、ワークストッカの製造コストやメンテナンスコストが増大するおそれがある。
【0025】
このため、ストッパSmに、ストッパSmのワーク検知アームとワーク掛止アームとを連結して連動させるための連結アームを設けると好ましい。これにより、制御機器や配線を要することなく、ストッパSmのワーク検知アームが検知した結果(ワークWの有無)を、ストッパSmのワーク掛止アームの動作に反映させることが可能になり、ワークストッカの製造コストやメンテナンスコストを抑えることができる。
【0026】
本発明のワークストッカにおいて、ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度(以下において、「角度θ」と表記する。図2を参照。)は、ワーク移送路の水平面に対する傾斜角度などによっても異なり、特に限定されない。しかし、ストッパSmのワーク掛止アームを前方へより倒伏しやすくすることを考慮すると、角度θは、90°以下とすると好ましい。角度θは、85°以下であるとより好ましく、80°以下であるとさらに好ましい。
【0027】
一方、ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度θを小さくしすぎると、ストッパSmのワーク掛止アームにワークWをしっかりと掛止させることができなくなるおそれがある。このため、角度θは、通常、30°以上とされる。角度θは、35°以上であると好ましく、40°以上であるとより好ましく、45°以上であるとさらに好ましい。
【0028】
ここで、「ワーク接触点Am」とは、図2に示すように、ワークストッカを側方(ワーク移送路を横断する方向)から見た場合における、ストッパSmのワーク掛止アーム7とワークWとの接触点のことをいう。該接触点は、通常、ワーク掛止アーム7の起立状態によって変化するが、ここでは、ストッパSmのワーク掛止アーム7がワーク移送路5上に現れてワークWを掛止している場合(通常、ストッパSmのワーク掛止アーム7が最も起立した状態となった場合)における前記接触点をワーク接触点Amとする。ストッパSmのワーク掛止アーム7とワークWとに複数の接触点が存在する場合には、該複数の接触点のうち、前記角度θが最大となる接触点をワーク接触点Amとする。
【0029】
また、「回動中心点Bm」とは、図2に示すように、ワークストッカを側方(ワーク移送路を横断する方向)から見た場合における、ストッパSmのワーク掛止アーム7の回動中心点のことをいう。ストッパSmのワーク掛止アームは、この回動中心点Bmを中心として回動することにより、後方へ起立する動作と前方へ倒伏する動作とを行う。
【0030】
本発明のワークストッカにおいて、ワーク移送路は、ワークを前方へ送ることができるものであれば特に限定されない。ワーク移送路は、動力機構が設けられたもの(例えば、アキューム機構付きのトップローラチェーンなどのコンベア)と、動力機構が設けられていないもの(例えば、前端よりも後端が高く支持された傾斜路)とに大別される。
【0031】
動力機構が設けられたワーク移送路は、その傾斜角度にかかわらず(例えば、ワーク移送路が水平又は後方から前方へ向かって登り坂になっていたとしても)、ワークを前方へ送ることが可能である。このため、ワークの重量がワーク掛止アームにかからないようにすることができる。したがって、ワークストッカを重いワークをストックするのに適したものとすることができる。
【0032】
一方、動力機構が設けられていないワーク移送路は、ワークの移送に動力を要しないため、ワークストッカの省エネルギー化を実現しやすい。また、動力機構が設けられていないワーク移送路は、一般的に、動力機構が設けられたものよりも駆動部を少なくすることができるので、故障が生じにくいだけでなく、メンテナンスも容易である。さらに、ワークストッカのコストを抑えることも可能である。
【発明の効果】
【0033】
以上のように、本発明によって、前方のワークが取り出された際に、後方のワークを前方へ送って確実に前詰めすることのできるワークストッカを提供することが可能になる。また、ワークの間隔を狭くすることが可能で、複数のワークを狭いピッチでストックすることのできるワークストッカを提供することも可能になる。さらに、このワークストッカの製造コストやメンテナンスコストを抑えることも可能になる。
【発明を実施するための最良の形態】
【0034】
本発明のワークストッカの好適な実施態様について、図面を用いて具体的に説明する。以下においては、ワーク移送路として動力機構を有さない傾斜路(前端よりも後端が高く支持された傾斜路)を利用した場合について説明する。図1は、本発明のワークストッカの要部を示した側面図である。図2は、図1のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。図1と図2においては、紙面に向かって左手側(ストッパS1側)を「前」とし、紙面向かって右手側(ストッパSM側)を「後」としている。
【0035】
本実施態様のワークストッカは、図1に示すように、前端よりも後端が高く支持された傾斜路5と、傾斜路5に沿って所定間隔で配されたM個(Mは、2以上の任意の整数。)のストッパS1〜SMとを備えたものとなっており、傾斜路5を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMで順次掛止していくものとなっている。
【0036】
傾斜路5の水平面に対する傾斜角度(以下において、「角度φ」と表記する。図2を参照。)は、0°よりも大きければ特に限定されない。角度φは、ワークWの転がりやすさ、ワークWの重量、ワークWの傷つきやすさ、ストッパS1〜SMの配置ピッチなどを考慮して適宜決定される。しかし、角度φを小さくしすぎると、ワークWが傾斜路5を前方に転がらなくなるおそれがある。このため、角度φは、通常、1°以上とされる。角度φは、1.5°以上であると好ましく、2°以上であるとより好ましい。
【0037】
一方、角度φを大きくしすぎると、ワークWが傾斜路5を前方へ転がる際の加速度が大きくなり、ワークWがワーク掛止アーム7に速い速度で衝突するようになる。したがって、ワークWやワーク掛止アーム7が傷つきやすくなるおそれがある。また、ワークWがワーク掛止アーム7に接触する際にワーク掛止アーム7がワークWから受ける力が大きくなり、1つ前のストッパに掛止されているワークWが飛び跳ねるおそれもある。このため、角度φは、通常、60°以下とされる。角度φは、45°以下であると好ましく、30°以下であるとより好ましい。
【0038】
ワークWが金属製のクランクシャフトであるなど、ワークWが重く転がりやすい場合には、角度φは、通常、20°以下とされる。この場合における角度φは、15°以下であると好ましく、10°以下であるとより好ましい。本実施態様のワークストッカも、金属製のクランクシャフトをワークWとしてストックするものとなっており、角度φは約3°に設定している。
【0039】
また、ストッパSmのワーク掛止アーム7におけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、ストッパSmのワーク掛止アーム7よりも後方の前記傾斜路とがなす角度θ(図2を参照。)は、角度φによっても異なり、特に限定されないが、既に述べた理由により、通常、30〜90°とされる。本実施態様のワークストッカにおいて、角度θは約65°に設定している。
【0040】
ストッパS1〜SMの個数(Mの値)は、2以上であれば特に限定されない。ストッパS1〜SMの個数は、ワークWの種類や、ワークストッカを設置する工程などを考慮して適宜決定される。しかし、ストッパS1〜SMの個数が少なすぎると、ワークストッカとしての利用価値が低くなってしまう。このため、ストッパS1〜SMの個数は、通常、3個以上とされる。ストッパS1〜SMの個数は、4個以上であると好ましく、5個以上であるとより好ましい。ストッパS1〜SMの個数に上限は特にないが、通常、30個以下とされる。本実施態様のワークストッカにおいて、ストッパS1〜SMの個数は11個となっている。
【0041】
ストッパS1〜SMの配置ピッチは、ワークWの寸法や、ワークストッカの設置に割くことのできる床面積などを考慮して、適宜決定される。床面積を効率的に利用することを考慮すると、ストッパS1〜SMの配置ピッチは、ワークWの最大回転直径(傾斜路5を転がるワークWの各部分のうち、最も大きな円を描いて回転する部分の回転直径)にできるだけ近づけると好ましい。本実施態様のワークストッカは、最大回転直径が20cmのクランクシャフトをワークWとしてストックするものとなっており、そのストッパS1〜SMの配置ピッチは、20cmとしている。
【0042】
M個のストッパS1〜SMのうち、先頭(前から数えて1番目)のストッパS1は、傾斜路5の前端付近から上方へ起立して設けられており、傾斜路5を前方へ転がってきたワークWをしっかりと受け止めることができるようになっている。ワークWが傷つかないようにするために、ストッパS1の後方の面(ワークWと接触する面)には、必要に応じて緩衝材などを貼ることもできる。
【0043】
一方、前から数えて2番目以降のストッパSm(mは、2以上、M以下の全ての整数。)は、いずれも可動構造を有しており、状況に応じてその形態が変化するようになっている。本実施態様のワークストッカにおいて、ストッパSmは、
(1)直前のストッパSm−1にワークWが掛止されているか否かを検知するためのワーク検知アーム6と、
(2)後続のワークWを掛止するためのワーク掛止アーム7と、
(3)ストッパSmのワーク検知アーム6とワーク掛止アーム7とを連結して連動させるための連結アーム8と
を備えたものとなっている。
【0044】
ワーク検知アーム6は、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視ブーメラン状としている。また、ワーク掛止アーム7も、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視「ト」の字状としている。さらに、連結アーム8も、その形状を特に限定されないが、本実施態様のワークストッカにおいては、側面視直線状としている。ワークWに接触するワーク検知アーム6やワーク掛止アーム7の先端には、ワークWを位置決めすることなどを目的として、切欠きや突起を設けることもできる。
【0045】
図2を参照しながら、ストッパSmについてさらに詳しく説明する。以下においては、「ストッパSmのワーク検知アーム6」を「ワーク検知アーム6」と省略して表記することがある。ストッパSm以外のストッパ(ストッパS1〜Sm−1,Sm+1〜SM)のワーク検知アーム6は、例えば「ストッパSm−1のワーク検知アーム6」というように、その所属を明確に表記する。ワーク掛止アーム7と連結アーム8についても同様である。
【0046】
ストッパSmのワーク検知アーム6は、その基端(下端)近傍の点Rmで支持躯体9に対して軸支されている。このため、ワーク検知アーム6の先端(上端)は、点Rmを中心として矢印a又は矢印bの向きに回動することができるようになっている。
【0047】
また、ストッパSmのワーク掛止アーム7は、その中ほどから後方に突出して設けられた突出部の先端近傍の点Bmで支持躯体9に対して軸支されている。このため、ストッパSmのワーク掛止アーム7の先端は、点Bmを中心として矢印c又は矢印dの向きに回動することができるようになっている。
【0048】
さらに、ストッパSmの連結アーム8は、ワーク検知アーム6における点Rmよりも先端(上端)寄りに設けられた点Qmと、ワーク掛止アーム7における基端(下端)近傍の点Cmとを連結している。連結アーム8は、ワーク検知アーム6に対しては点Qmを中心として、ワーク掛止アーム7に対しては点Cmを中心として、それぞれ回動することができるようになっている。
【0049】
したがって、ストッパSmのワーク検知アーム6の先端(上端)がワークWによって押し下げられ、ワーク検知アーム6が前方へ倒伏(回動中心点Rmを中心として図2の矢印aの向きへ回動)するにしたがい、ワーク検知アーム6における点Qmが前方へと移動し、連結アーム8の前端が前方へ引っ張られるようになっている。このとき、連結アーム8は、その後端がワーク掛止アーム7における点Cmを前方へと引っ張り、ワーク掛止アーム7を後方へ起立(回動中心点Bmを中心として図2の矢印dの向きへ回動)させる。
【0050】
換言すると、ストッパSmのワーク掛止アーム7の先端(上端)がワークWによって押し下げられ、ワーク掛止アーム7が前方へ倒伏(回動中心点Bmを中心として図2の矢印cの向きへ回動)するにしたがい、ワーク掛止アーム7における点Cmが後方へと移動し、連結アーム8の後端が後方へ引っ張られるようになっている。このとき、連結アーム8は、その前端がワーク検知アーム6における点Qmを後方へと引っ張り、ワーク検知アーム6を後方へ起立(回動中心点Rmを中心として図2の矢印bの向きへ回動)させる。
【0051】
ところで、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWと、ストッパSmのワーク掛止アーム7に掛止されているワークWとが静止している図2の状態においては、ワーク掛止アーム7に掛止されているワークWからワーク掛止アーム7の接触点Amに加えられる力FAm(ベクトル量)と、連結アーム8からワーク掛止アーム7の点Cmに加えられる力FCm(ベクトル量)と、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWからストッパSmのワーク検知アーム6の接触点Pmに加えられる力FPm(ベクトル量)と、連結アーム8からワーク検知アーム6の点Qmに加えられる力FQm(ベクトル量)との間に、下記式1〜3で表される関係が成立している。
【0052】
式1 : |fAm|×|BmAm|=|fCm|×|BmCm|
式2 : |fPm|×|RmPm|=|fQm|×|RmQm|
式3 : |FCm|=|FQm|
【0053】
ただし、上記式1〜3においては、ワーク検知アーム6の質量、ワーク掛止アーム7の質量及び連結アーム8の質量を無視している。また、fAm(ベクトル量)は、FAm(ベクトル量)の線分BmAmに垂直な成分である。さらに、fCm(ベクトル量)は、FCm(ベクトル量)の線分BmCmに垂直な成分である。さらにまた、fPm(ベクトル量)は、FPm(ベクトル量)の線分RmPmに垂直な成分である。そして、fQm(ベクトル量)は、FQm(ベクトル量)の線分RmQmに垂直な成分である。
【0054】
ストッパSmのワーク掛止アーム7における接触点AmにワークWが接触する瞬間などには、衝撃により、FAmの大きさが図2で表したものよりも大きくなるが、ワーク検知アーム6の先端がワークWによって押し下げられている限りは、ワーク掛止アーム7が前方へ倒伏することはない。というのも、図2の状態からワーク掛止アーム7が前方へ倒伏しようとすると、ワーク検知アーム6が後方へ起立しようとするが、このとき、それまでは大半が傾斜路5に加えられていた、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されているワークWの荷重が、ワーク検知アーム6の接触点Pmに加わるようになる(FPmの大きさが大きくなる)からである。
【0055】
一方、図2の状態から、ストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されていたワークWが、前方へ転がったり、取り出されたりすることによって、ストッパSmのワーク検知アーム6の上方から移動した場合には、ワーク検知アーム6の後方への起立を妨げるものがなくなるので、ストッパSmのワーク掛止アーム7に掛止されていたワークWの荷重によって、ワーク掛止アーム7が前方へ倒伏するとともに、ワーク検知アーム6が後方へ起立する。
【0056】
このとき、ワーク掛止アーム7に掛止されているワークWからワーク掛止アーム7の接触点Amに加えられる力FAm(ベクトル量)の向きと、ワーク掛止アーム7の先端が移動する向き(図2の矢印cの向き)とが、略一致しているので、ワーク掛止アーム7の接触点Amには大きな摩擦力が働かない。したがって、ワーク掛止アーム7は、スムーズに前方へ倒伏することができる。ストッパSmのワーク掛止アーム7に掛止されていたワークWは、ワーク掛止アーム7を前方へ倒伏させながら、傾斜路5を前方へと転がっていく。
【0057】
ストッパSmのワーク掛止アーム7を前方へ倒伏させながら傾斜路5を前方へ転がっていたワークWは、そのうち、後方へ起立した状態となっているワーク検知アーム6に接触し、ワーク検知アーム6の先端を押し下げながら、ワーク検知アーム6を前方へ倒伏させる。このとき、ワークWは、ストッパSmのワーク掛止アーム7の上方から既に移動しており、ワーク掛止アーム7は、後方へ起立することが可能な状態となっている。
【0058】
このため、傾斜路5を前方へ転がるワークWによって、ワーク検知アーム6が前方へ倒伏するにしたがい、ストッパSmのワーク掛止アーム7が再び後方へ起立する。ワークWがストッパSm−1(図1を参照)のワーク掛止アーム7に掛止されるべき位置に到達すると、ストッパSmのワーク検知アーム6とワーク掛止アーム7は、再び図2の状態へと復帰し、ストッパSmのワーク掛止アーム7は、傾斜路5を後方から転がってくるワークWを掛止することができる状態となる。
【0059】
図3〜図8に、本実施態様のワークストッカのストッパS1〜S4のそれぞれにワークWを掛止し、ストッパS1に掛止されていたワークWを取り出した後に、ワークWが前詰めされていく様子を示す。図3〜図8においては、ワークWの直前の位置を破線で示している。
【0060】
図3は、本発明のワークストッカの、ストッパS1〜S4のそれぞれにワークWを掛止させた状態(初期状態)と、ストッパS1に掛止されていたワークWを取り出した瞬間(ワーク取出時)の状態と、ストッパS2に掛止されていたワークWが動き始めた瞬間(ワーク取出時からt1経過後)の状態とを示した側面図である。図3に示すように、ストッパS1に掛止されていたワークWを取り出した直後は、まず、ストッパS2に掛止されていたワークWのみが傾斜路5を前方へ転がり始める。
【0061】
図4は、本発明のワークストッカの、ワーク取出時からt2(>t1)経過後の状態と、ワーク取出時からt3(>t2)経過後の状態と、ワーク取出時からt4(>t3)経過後の状態とを示した側面図である。図4に示すように、ストッパS2に掛止されていたワークWが傾斜路5を前方へ転がり始めてからしばらくすると、続いて、ストッパS3に掛止されていたワークWが傾斜路5を前方へ転がり始める。このとき、ストッパS4に掛止されているワークWは、未だ静止したままの状態となっている。
【0062】
図5は、本発明のワークストッカの、ワーク取出時からt5(>t4)経過後の状態と、ワーク取出時からt6(>t5)経過後の状態と、ワーク取出時からt7(>t6)経過後の状態とを示した側面図である。図5に示すように、ストッパS3に掛止されていたワークWが傾斜路5を前方へ転がり始めてからしばらくすると、続いて、ストッパS4に掛止されていたワークWが傾斜路5を前方へ転がり始める。
【0063】
図6は、本発明のワークストッカの、ワーク取出時からt8(>t7)経過後の状態と、ワーク取出時からt9(>t8)経過後の状態と、ワーク取出時からt10(>t9)経過後の状態とを示した側面図である。図6に示すように、傾斜路5を一番早く転がり始めたワークW(初期状態でストッパS2に掛止されていたワークW)が、最初に1つ前のストッパ(ストッパS1)に到達して掛止される。
【0064】
図7は、本発明のワークストッカの、ワーク取出時からt11(>t10)経過後の状態と、ワーク取出時からt12(>t11)経過後の状態と、ワーク取出時からt13(>t12)経過後の状態とを示した側面図である。図7に示すように、傾斜路5を二番目に早く転がり始めたワークW(初期状態でストッパS3に掛止されていたワークW)が、二番目に早く1つ前のストッパ(ストッパS2)に到達して掛止される。
【0065】
図8は、本発明のワークストッカの、ワーク取出時からt14(>t13)経過後の状態を示した側面図である。図8に示すように、傾斜路5を最後に転がり始めたワークW(初期状態でストッパS4に掛止されていたワークW)が、最後に1つ前のストッパ(ストッパS3)に到達して掛止される。このとき、ワークWは、図3の初期状態から1つずつ前詰めされた状態となっている。
【0066】
このように、本実施態様のワークストッカは、傾斜路5を後方から転がってくる複数のワークWを前詰めしながらストッパS1〜SMに順次掛止させていくことができるものとなっている。
【0067】
本発明のワークストッカは、ワークWの種類を限定されるものではなく、傾斜路5を転がることが可能な形態を有するワークWに対して幅広く使用することができる。具体的には、圧延ロールなど、全体が円筒状に形成されたワークWや、クランクシャフトなど、全体が円筒状でなくてもその一部の区間が円筒状に形成されたワークWに対して幅広く使用することができる。
【図面の簡単な説明】
【0068】
【図1】本発明のワークストッカの要部を示した側面図である。
【図2】図1のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。
【図3】本発明のワークストッカの、ストッパS1〜S4のそれぞれにワークを掛止させた状態(初期状態)と、ストッパS1に掛止されていたワークを取り出した瞬間(ワーク取出時)の状態と、ストッパS2に掛止されていたワークが動き始めた瞬間(ワーク取出時からt1経過後)の状態とを示した側面図である。
【図4】本発明のワークストッカの、ワーク取出時からt2(>t1)経過後の状態と、ワーク取出時からt3(>t2)経過後の状態と、ワーク取出時からt4(>t3)経過後の状態とを示した側面図である。
【図5】本発明のワークストッカの、ワーク取出時からt5(>t4)経過後の状態と、ワーク取出時からt6(>t5)経過後の状態と、ワーク取出時からt7(>t6)経過後の状態とを示した側面図である。
【図6】本発明のワークストッカの、ワーク取出時からt8(>t7)経過後の状態と、ワーク取出時からt9(>t8)経過後の状態と、ワーク取出時からt10(>t9)経過後の状態とを示した側面図である。
【図7】本発明のワークストッカの、ワーク取出時からt11(>t10)経過後の状態と、ワーク取出時からt12(>t11)経過後の状態と、ワーク取出時からt13(>t12)経過後の状態とを示した側面図である。
【図8】本発明のワークストッカの、ワーク取出時からt14(>t13)経過後の状態を示した側面図である。
【図9】従来のワークストッカの要部を示した側面図である。
【図10】図9のワークストッカにおけるストッパSmの周辺を拡大した状態を示した側面図である。
【符号の説明】
【0069】
1 傾斜路
2 ワーク受け部
3 ワーク掛止部
4 支持躯体
5 傾斜路(ワーク移送路)
6 ワーク検知アーム
7 ワーク掛止アーム
8 連結アーム
9 支持躯体
S1〜SM ストッパ
W ワーク
【特許請求の範囲】
【請求項1】
ワークを前方へ送るためのワーク移送路と、ワーク移送路に沿って所定間隔で配された複数のストッパとを備え、ワーク移送路を後方から前方へ送られてくる複数のワークを前詰めしながら前記複数のストッパに順次掛止させていくワークストッカであって、
前から数えて2番目以降のストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)が、直前のストッパSm−1にワークが掛止されているか否かを検知するためのワーク検知アームと、後続のワークを掛止するためのワーク掛止アームとを備え、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知している場合には、ストッパSmのワーク掛止アームが後方へ起立して後続のワークを掛止し、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アームが前方へ倒伏して後続のワークを通過させる
ことを特徴とするワークストッカ。
【請求項2】
ストッパSmが、ストッパSmのワーク検知アームとワーク掛止アームとを連結して連動させるための連結アームを備えた請求項1記載のワークストッカ。
【請求項3】
ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度が、90°以下とされた請求項1記載のワークストッカ。
【請求項4】
ワーク移送路が、前端よりも後端が高く支持された傾斜路である請求項1記載のワークストッカ。
【請求項1】
ワークを前方へ送るためのワーク移送路と、ワーク移送路に沿って所定間隔で配された複数のストッパとを備え、ワーク移送路を後方から前方へ送られてくる複数のワークを前詰めしながら前記複数のストッパに順次掛止させていくワークストッカであって、
前から数えて2番目以降のストッパSm(mは、2以上で、前記ストッパの総数以下の全ての整数。)が、直前のストッパSm−1にワークが掛止されているか否かを検知するためのワーク検知アームと、後続のワークを掛止するためのワーク掛止アームとを備え、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知している場合には、ストッパSmのワーク掛止アームが後方へ起立して後続のワークを掛止し、
ストッパSmのワーク検知アームが直前のストッパSm−1にワークが掛止されていることを検知していない場合には、ストッパSmのワーク掛止アームが前方へ倒伏して後続のワークを通過させる
ことを特徴とするワークストッカ。
【請求項2】
ストッパSmが、ストッパSmのワーク検知アームとワーク掛止アームとを連結して連動させるための連結アームを備えた請求項1記載のワークストッカ。
【請求項3】
ストッパSmのワーク掛止アームにおけるワーク接触点Amと回動中心点Bmとを通る直線AmBmと、該ワーク掛止アームよりも後方のワーク移送路とがなす角度が、90°以下とされた請求項1記載のワークストッカ。
【請求項4】
ワーク移送路が、前端よりも後端が高く支持された傾斜路である請求項1記載のワークストッカ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−58958(P2010−58958A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−228872(P2008−228872)
【出願日】平成20年9月5日(2008.9.5)
【出願人】(508269961)双葉電機株式会社 (1)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月5日(2008.9.5)
【出願人】(508269961)双葉電機株式会社 (1)
【Fターム(参考)】
[ Back to top ]