
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、半導体露光装置の投影レンズなど高精度の光学素子を保持可能なワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置に関する。
【背景技術】
【0002】
半導体露光装置(ステッパー)は、回路パターンを投影レンズによって縮小し、ウェハー上を移動しながら投影露光する。この投影レンズは、例えば非球面からなる大型レンズから構成され、その形状精度は、1nm〜0.1nm程度の精密さが求められることが知られている。
【0003】
上記ステッパーに使用される投影レンズやミラーなどに代表されるような高精度の光学素子は、求められる形状精度が非常に高いため、平滑研磨装置などによって加工される際に、3次元形状測定装置によって形状を測定しながら加工される。
【0004】
一般に、このような高精度な光学素子の形状を測定する3次元形状測定装置としては、特許文献1に記載されたような、プローブ(スピンドル16)によってワークの表面を走査して形状を測定するものが広く知られている。
【0005】
また、上述した投影レンズなどの大型のレンズの場合、そのサイズがプローブの測定範囲を超えてしまうことがある。そのため、上記特許文献1記載の3次元形状測定装置では、ワークを載置するテーブル103を回転機構165によって回転可能に構成し、一定範囲ごとにワークを走査可能な構成となっている。
【0006】
ところで、投影レンズなどの高精度な光学素子は、上述したようにナノメートル単位でその形状を測定する必要があり、測定時の微小なズレであっても、正確な測定が出来なくなってしまう。
【0007】
ここで、特許文献1記載の3次元形状測定装置は、テーブル103が常に支持第154に回転可能な状態で支持される構成となっている。そのため、測定の際にテーブル103が動きやすいという問題があった。
【0008】
他方、ワークを載置するテーブル(回転テーブル101)として、特許文献2に記載のように、空圧源113からのエアによってテーブル101を浮上させ、このテーブル101を浮上させた後に、回転割り出しを行うものも案出されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開昭59−65702号公報
【特許文献2】特開平11−304460号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献2記載の装置のように、テーブル101を回転させる際には、エアによってテーブルを浮上させると、回転機構に生じる負荷を減らすことができる。また、測定時には、エアの供給を停止し、ベース103上にテーブル101を着座させるため、テーブル101が動いてしまう虞も少ない。
【0011】
しかしながら、上記特許文献2の装置は、エアのオン・オフによってテーブル101を浮かせたり、着座させたりする。そのため、テーブル101を安定して着座させることが難しく、着座の際に衝撃が発生してしまう。そして、テーブル101を安定してゆっくりと着座させられないと、ナノオーダーの形状精度が求められる光学素子では、着座時の衝撃によって形状が変形してしまう虞がある。また、着座の際にテーブルを回転させる回転機構を変形させる虞もある。
【0012】
そこで、本発明は、精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、ワークを保持する保持面、該保持面と反対側の背面を有する回転ヤトイと、前記回転ヤトイの背面を着座させる回転ヤトイ受部を有するベース部材と、前記回転ヤトイの背面と接離可能な支持部、該支持部を昇降させる昇降部、前記支持部を回転させる回転部を有する回転昇降機構と、を備え、前記回転昇降機構は、前記昇降部によって上昇させられて前記背面に接触した前記支持部によって、前記回転ヤトイを前記ベース部材から浮かされた状態で支持すると共に、前記回転部により回転し得る回転位置と、前記昇降部によって前記支持部が下降させられて前記背面から離れ、前記回転ヤトイを前記ベース部材に着座させる着座位置と、に昇降駆動させる、ことを特徴とするワーク保持装置にある。
【発明の効果】
【0014】
本発明によれば、ワークを保持する回転ヤトイの背面に接離可能な支持部と、この支持部を昇降させる昇降部と、を有する。そして、回転ヤトイを回転させる際には、支持部を上昇させて回転ヤトイの背面と当接させ、ベース部材から回転ヤトイを浮かせる。また、ワークの形状を測定する際は、支持部を下降させて回転ヤトイの背面から離し、回転ヤトイをベース部材に着座させる。このように、背面に直接接触する支持部材により回転ヤトイを昇降させるため、安定して回転ヤトイを昇降させることができ、高精度な光学素子のようなワークであっても変形させずに保持することができる。また、回転ヤトイをベース部材から浮いた状態で回転させるため、回転部に掛る負荷を軽減することができる。
【図面の簡単な説明】
【0015】
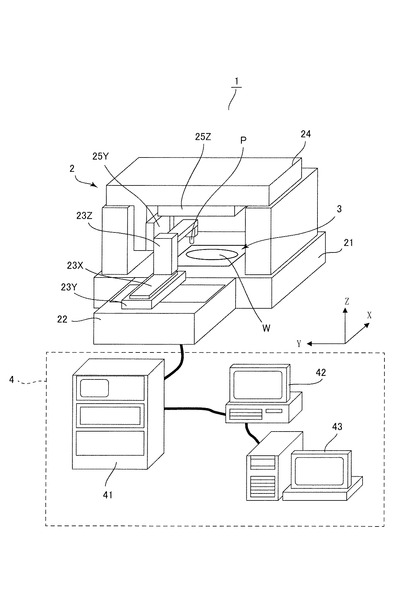
【図1】本発明の第1の実施の形態に係る3次元形状測定装置を示す模式図。
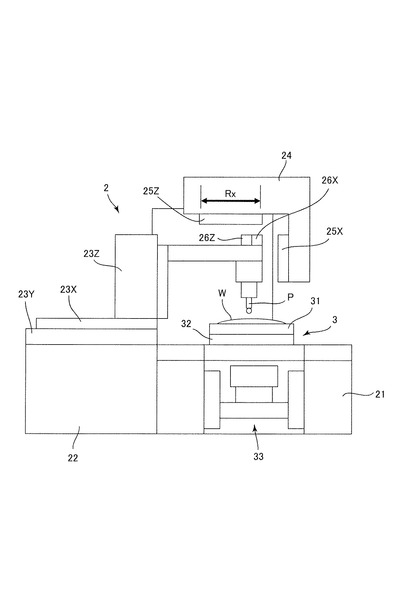
【図2】本発明の第1の実施の形態に係る3次元形状測定装置を示す側面図。
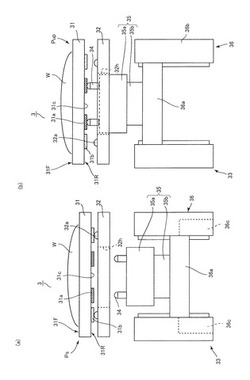
【図3】本発明の第1の実施の形態に係るワーク保持装置を示す模式図であって、(a)は着座位置を示す図、(b)は回転位置を示す図。
【図4】(a)回転ヤトイを取り外した状態のワーク保持装置、(b)回転ヤトイの背面を示す模式図。
【図5】ワークとプローブの走査範囲との関係を示す模式図。
【図6】大型のワークを測定する際の手順を示す工程図。
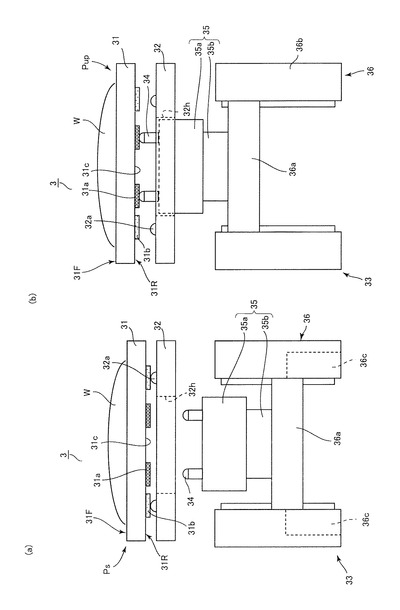
【図7】本発明の第2の実施の形態に係るワーク保持装置を示す模式図であって、(a)は着座位置を示す図、(b)は回転位置を示す図。
【発明を実施するための形態】
【0016】
[第1の実施の形態]
[測定装置の概略構成]
以下、図面に基づいて、本発明の実施形態に係る3次元形状測定装置1及びワーク保持装置3について説明をする。なお、以下の説明において「ヤトイ」とは、保持対象を保持する保持具(例えばテーブルなど)としての意味で使用する。
【0017】
まず、図1及び図2に基づいて3次元形状測定装置1の構成について説明をする。図1及び図2に示すように、3次元形状測定装置1は、プローブPによってワークWの表面を走査して、その形状を測定する3次元形状測定装置であり、計測部2、ワーク保持部としてのワーク保持装置3及び制御部4を備えている。
【0018】
上記計測部2は、ワーク保持装置3がその中央部に組み込まれた定盤21と、この定盤21に連結されたステージ架台22と、を有している。ステージ架台22には、Y軸方向に移動自在なY軸ステージ23Y、X軸方向に移動自在なX軸ステージ23X及びZ軸方向に移動自在なZ軸ステージ23Zを介して、プローブPがワーク保持装置3に臨む形で支持されている。
【0019】
上記プローブPは、接触式のプローブから構成されており、ワークWの表面を一定の圧力で接触することが可能なように出来ている。具体的には、プローブ軸を板バネで保持し、板バネの撓み量を変位計等で計測し、撓み量が一定になるように制御するように構成されている。
【0020】
また、定盤21には、プローブP及びワーク保持装置3を跨ぐように、門型のミラーフレーム24が設けられている。このミラーフレーム24には、互いに直交する位置にZ基準ミラー25Zと、Y基準ミラー25Yとが取付けられている。また、X基準ミラー25Xが、これらZ基準ミラー25Z及び、Y基準ミラー25Yのそれぞれと直交する位置に取付けられている。
【0021】
更に、図2に示すように、プローブPには、レーザ測長用Z軸干渉計26Z、レーザ測長用X軸干渉計26X、レーザ測長用Y軸干渉計(不図示)が取付けられている。レーザ測長用Z軸干渉計26Zは、Z基準ミラー25Zとの距離を計測する干渉計である。レーザ測長用X軸干渉計26Xは、X基準ミラー25Xとの距離を計測する干渉計である。レーザ測長用Y軸干渉計は、Y基準ミラー25Yとの距離を計測するレーザ測長用Y軸干渉計である。
【0022】
また、プローブPには、高さ方向にもう一つレーザ測長用干渉計(不図示)が取り付けられており、上下二つの干渉計差を計測することによってY軸方向及びX軸方向のステージピッチング量を測定するように構成されている。
【0023】
このように、計測部2は、X、Y、Z軸それぞれのレーザ測長用干渉計26X,26Zを用いてプローブPの位置を検出する。そして、制御部4からの指令に基づいて、X、Y、Z軸それぞれのステージ23X,23Y,23Zを移動させて、プローブPによってワークWの表面を走査するように構成されている。
【0024】
上記制御部4は、電装ユニット41と、コントロールコンピュータ42と、データ処理用コンピュータ43と、を有している。電装ユニット41は、各種ドライバを搭載しており、例えば、移動ステージ23X,23Y,23Zの駆動モータのドライバ、詳しくは後述するワーク保持装置3の回転用モータ35bのドライバを搭載している。
【0025】
また、電装ユニット41は、接触式プローブPとワークWとの接触圧力を一定に保つようにZ軸ステージ23Zを制御する圧力制御ユニットを搭載している。プローブPとワークWが接触している間は、Z軸ステージドライバに代わり、この圧力制御ユニットによってZ軸ステージ23Zは駆動される。
【0026】
更に、電装ユニット41は、レーザ測長用光源、レーザ測長用干渉計26X,26Zからの測長信号を取り込むための測長ボードを搭載している。
【0027】
一方、コントロールコンピュータ42は、電装ユニット41へ各種信号を出力すると共に、電装ユニット41から信号が入力されるコンピュータである。このコントロールコンピュータ42は、電装ユニット41に搭載された各種ドライバを制御するプログラムが搭載(格納)されている。
【0028】
更に、コントロールコンピュータ42は、各レーザ測長用干渉計からの測長信号を、電装ユニット41を介してサンプリングし、測長データに換算する測長データ取り込み用プログラムを搭載している。
【0029】
また、上記データ処理用コンピュータ43は、測定条件パラメータなどを管理するコンピュータであり、管理する測定条件としては、測定範囲、測定回数、測定速度、測定種類、被測定物の設計値形状などがある。具体的には、データ処理用コンピュータ43は、測定プログラム、データ取込プログラム、形状データ算出プログラム、誤差算出プログラム、形状位置算出プログラム及びつなぎ合わせプログラムを搭載している。
【0030】
上記測定プログラムは、測定条件パラメータを処理して測定手順データとし、測定条件パラメータと共にコントロールコンピュータ42に送る測定プログラムである。上記データ取り込みプログラムは、各レーザ測長用干渉計からの測長データを、コントロールコンピュータ42を介して取り込むプログラムである。上記形状データ算出プログラムは、取り込んだレーザ測長データからワークWの表面形状を算出するプログラムである。上記誤差算出プログラムは、算出したワークWの形状データとワークWの設計値形状から、測定したワークWの設計値からの誤差を算出するプログラムである。上記形状位置算出プログラムは、ワークWの形状データから、ワークWが装置の原点及び座標、或いは任意原点及び座標に対して置かれている三次元位置を算出するプログラムである。上記つなぎ合わせプログラムは、算出したワークWの複数部分の形状データからワークWの全体形状を算出するプログラムである。
【0031】
[ワーク保持装置の詳細構成]
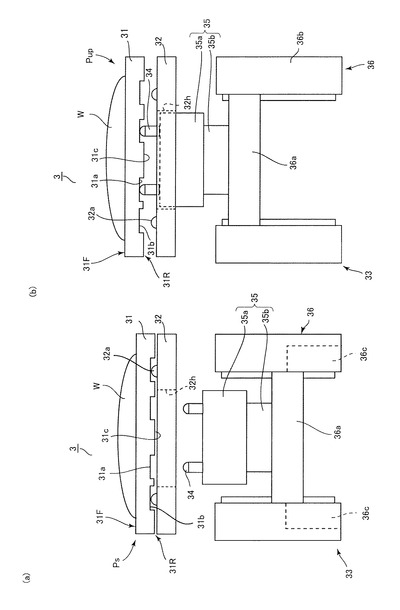
ついで、上述したワーク保持装置3の構成について、図1及び図2を参照しつつ、図3、図4に基づいて詳しく説明をする。図3に示すように、ワーク保持装置3は、定盤21に支持されたベース部材32と、該ベース部材32に着座すると共にワークWが載置される回転ヤトイ31と、上記ベース部材32の下方に配設される回転昇降機構33と、を備えて構成されている。
【0032】
上記回転ヤトイ31は、ワークWを載置するワーク専用ヤトイであり、ワークWを保持する保持面31Fと、この保持面と反対側の背面31Rと、を有する円形の板状部材から構成されている。
【0033】
また、ベース部材32は、定盤21に支持された板状部材からなる汎用ヤトイであり、回転ヤトイ31の背面31Rを着座させる回転ヤトイ受部32aを有している。回転ヤトイ31は、このベース部材32の着座部材に着座することによって、定盤21上に位置決めされ、ワークWの測定が可能な状態となる。
【0034】
更に、ベース部材32の中心には、後述する回転昇降機構33の支持部34が回転ヤトイ31の背面31Rに接続するための孔32hが形成されている。
【0035】
上記回転昇降機構33は、回転ヤトイ31をベース部材32から浮かせた状態で回転させる装置であり、回転ヤトイ31の背面31Rと接離可能な支持部34、支持部34を昇降させる昇降部36、支持部34を回転させる回転部35を有している。
【0036】
上記昇降部36は、4本の脚部36bと、これら複数の脚部36bの間に支持されつつ昇降する昇降ステージ36aと、この昇降ステージ36aを昇降させる直動アクチュエータ36cと、を有している。なお、この直動アクチュエータ36cは、昇降ステージ36aに組込まれていると共に、エアーシリンダーやリニアモータなどから構成されている。
【0037】
上記回転部35は、昇降ステージ36a上に取付けられた回転用モータ35bと、この回転用モータ35bの上部に取付けられて回転する回転部材35aと、を有している。
【0038】
上記支持部34は、回転部材35aの上面から回転ヤトイ31に向かって突出した突状部材であり、回転ヤトイ31の背面31Rと接触する先端部が所定の曲率を有する突形状をしている。即ち、この支持部34は、回転ヤトイ31の背面31Rと点接触するような形状となっている。
【0039】
上述した回転ヤトイ31、ベース部材32及び回転部材35aは、その中心Cが一致するように配設されていると共に、回転部材35aは、その直径がベース部材32の孔32hよりも小さく形成されている。そのため、回転昇降機構33は、回転位置Pup(図3(b)の位置)と、着座位置PS(図3(a)の位置)に昇降駆動する。回転位置Pupは、上記昇降部35によって上昇させられて回転ヤトイ31の背面31Rに接触した支持部34によって、回転ヤトイ31をベース部材32から浮かされた状態で支持される共に、回転部35により回転し得る位置である。着座位置Psは、昇降部35によって支持部34が下降させられて回転ヤトイ31の背面31Rから離れ、ベース部材32に回転ヤトイ31を着座させる位置である。
【0040】
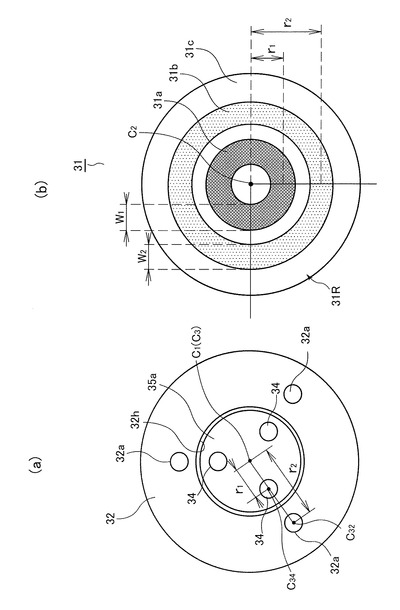
次に、ベース部材32及び回転昇降機構33と、回転ヤトイ31と、の接触関係について図3を参照しつつ、図4に基づいて詳しく説明をする。なお、図4(a)は、ワーク保持装置3から回転ヤトイ31を取り外した状態を示す平面図であり、図4(b)は、回転ヤトイ31の背面を示す模式図である。
【0041】
図4(a)に示すように、回転ヤトイ31の背面31Rと接触する支持部34は、回転部材35aの中心C1から(第1の)所定距離r1、離された円上に3つ配設されており、回転ヤトイ31をこれら3つの支持部34によって3点支持するようになっている。
【0042】
また、同様に回転ヤトイ31の背面31Rが着座する回転ヤトイ受部32aも支持部材35aの中心C1から(第2の)所定距離r2、離された円上に3つ配設されている(r2>r1)。そして、回転ヤトイ31は、これら3つの回転ヤトイ受部32aによって3点支持されている。更に、この回転ヤトイ受部32aは、先端部分が所定の曲率を有する突形状をしており、支持部34と同様に回転ヤトイ31を点支持するようになっている。
【0043】
即ち、上記支持部34及び回転ヤトイ受部32aは、ワークW及び回転ヤトイ31に対して、重心が3点の概略中心に位置するように(本実施形態では中心C1,C2,C3が一致するように)配置されている。言い換えると、ワークW及び回転ヤトイ31が略回転対称形状ならば、支持部34ならびに回転ヤトイ受部32aは概略正三角形の位置に配置されている。
【0044】
一方、図4(b)に示すように、上記支持部34及び回転ヤトイ受部32aと当接する回転ヤトイ31の背面31Rは、支持部34の指示を受得る支持領域31aを有している。また、回転ヤトイ受部32aが着座し得る着座領域31b、これら支持領域及び着座領域以外の背面31cを有して構成されている。
【0045】
上記支持領域31aは、回転部材35aの回転中心C1(本実施形態では中心C1と回転ヤトイ31の中心C2は一致)を中心とする(第1の)所定幅W1を有するリング形状をしており、この幅W1の中央に支持部34の中心C34が位置するようになっている。
【0046】
また、上記着座領域31bは、回転部材35aの回転中心C1を中心とする(第2の)所定幅W2を有するリング形状をしており、この幅W2の中央に回転ヤトイ受部32aの中心C32が位置するようになっている。
【0047】
更に、これら支持領域31a及び着座領域31bは、着座領域31bが外径側に位置した同心円状に配置されており、他の背面31cよりも一段高く削り出されている。また、これら支持領域31a及び着座領域31bは、他の背面31cに比して、面精度が高く出されている。
【0048】
これにより、回転ヤトイ31は、それぞれ面精度の高い支持領域31a、着座領域31bが、支持部34、回転ヤトイ受部32aに3点支持され、回転位置Pupでも、着座位置Psでも精度よく支持されるようになっている。
【0049】
[作用]
ついで、本実施形態に係る3次元形状測定装置1の作用について説明をする。半導体露光装置用の投影レンズ(以下、単純にワークという)Wの表面形状を測定するにあたり計測者は、測定位置に、不図示の搬送系から、回転ヤトイ31に保持されたワークWを、この回転ヤトイ31を搭載したベース部材32ごと搬入する。
【0050】
ワークWが測定位置、即ち、ワーク保持装置3の上方に搬送されると、ベース部材32を定盤21に搭載する。この時、ワークWの大きさがいずれかの基準ミラー25X,25Y,25Zの計測可能範囲、即ちプローブPの走査範囲を超えてしまっている場合ある。この場合、測定者は、プローブP及び回転昇降機構33を制御する制御部(制御装置)4によって、ワーク上におけるプローブPの走査範囲を分割する。そして、回転ヤトイ31を回転させて、分割した領域ごとにプローブPによってワークWの表面を走査させ、ワークWの全範囲について3次元形状を計測する。
【0051】
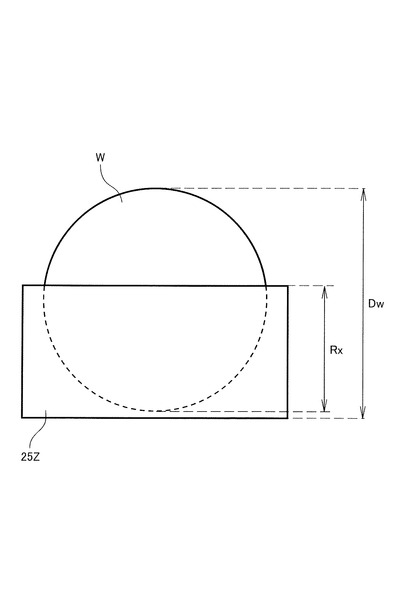
以下、図5に示すように、ワークWの大きさ(直径Dw)がZ基準ミラー25ZのX方向の計測可能範囲Rxを超えてしまっている場合の、ワークWの3次元形状の測定方法について詳しく説明をする。なお、本実施形態においては、ワークWの大きさに対してZ基準ミラー25Zがカバーする範囲が概略半分なので、接続の重なりを考慮して3回の測定のよってワークの全面の形状を算出する。
【0052】
測定者は、まずワークWの計測に際し、データ処理用コンピュータ43に対してパラメータ、測定範囲及び測定トレース方法を設定する。なお、パラメータとしてはワークの設計データ、測定範囲としてはワークWの基準ミラーと重なる部分(例えば図6のR1部分)、トレース方法としては回転角度120°、測定回数3回及びトレース速度などを入力する。
【0053】
次に、データ処理用コンピュータ43からコントロールコンピュータ42を介して電装ユニット41に指令して、全ての移動ステージ23X,23Y,23Zを原点、又はワークWの搬入、搬出に障害とならない位置まで移動させる。
【0054】
そして、回転ヤトイ31に保持されたワークを、上述したように搬送装置によって、ベース部材32ごと定盤21の測定位置に搬送して、位置決めする。測定位置への位置決めが終了すると、データ処理用コンピュータ43は測定開始指令をコントロールコンピュータ42へ送る。なお、このとき同時に上記設定した各種パラメータもコントロールコンピュータ42へ送る。
【0055】
すると、コントロールコンピュータ42は、プローブPをZ軸の原点位置に位置させ、その後、データ処理用コンピュータ43より送られた各種パラメータに従って、プローブPのXY軸位置を、測定開始点に移動させる。
【0056】
プローブPが測定開始点に移動すると、プローブPを下降させてワーク表面に接触させる。そして、プローブPとワークWとの接触圧が一定の状態で、データ処理用コンピュータ43で設定したパラメータに従って、指定された範囲のワーク表面を走査する。
【0057】
そして、プローブPによって、指定された範囲の走査が終了すると、プローブPをワークWから離し、原点位置まで移動させる。これにより、1回目の測定が終了する。
【0058】
1回目の測定が終了すると、コントロールコンピュータ42は、電装ユニット41を通して回転昇降機構33に上昇指令を与える。回転昇降機構33の直動アクチュエータ36cは、上昇指令を受けると、昇降ステージ36aを上昇させて行き、支持部34を、回転ヤトイ31の背面31Rの支持領域31aに接触させる。そして、この回転ヤトイ31を3つの支持部34によって3点支持した状態で、昇降ステージ36aを更に上昇させ、回転ヤトイ31をベース部材32から浮かせる(図3(b)の回転位置Pup)。
【0059】
回転昇降機構33が回転位置Pupまで上昇すると、コントロールコンピュータ42は、回転用モータ35bを駆動させて、支持部34に支持された回転ヤトイ31を、予め設定された角度(本実施形態では120°)だけ回転させる。
【0060】
そして、回転が終了すると、コントロールコンピュータ42は、回転昇降機構33の直動アクチュエータ36cに下降指令を与え、昇降ステージ36aを着座位置Psまで下降させる。昇降ステージ36aが下降して行くと、回転ヤトイ31の背面31Rの着座領域31bと、回転ヤトイ受部32aとが接触し、3つの回転ヤトイ受部32aに回転ヤトイ31が着座する。そして、この回転ヤトイ31が回転ヤトイ受部32aに3点支持された状態で、支持部34だけが下降して行き、支持部34が支持領域31aから離れる。
【0061】
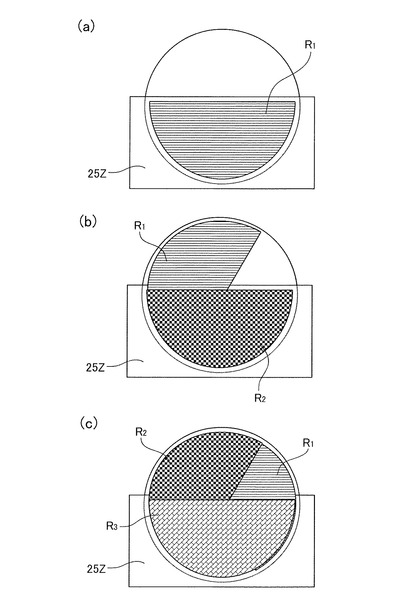
上記回転ヤトイ31の回転動作(回転割出し)が終了すると、1回目と同様に2回目の表面形状測定が行われる(図5(b)の状態)。そして、2回目の表面形状測定が終了すると、再度、上記回転動作が行われ、3回目の形状測定が行われる(図5(c)の状態)。
【0062】
3回目の形状測定が終了すると、ワークWの全範囲の形状測定が終了し、ワークWをベース部材32ごと搬送装置によって3次元形状測定装置から降ろすと共に、測定したデータをつなぎ合わせて、ワーク全体の形状を演算する。
【0063】
なお、本実施形態のように、ワークWの計測範囲R1,R2,R3は、各測定ごとにその領域が一部被っても良いと共に、被らないように設定しても良い。また、測定を6回など任意の回数も設定しても良い。
【0064】
このように、回転ヤトイ31を背面31Rに直接接触する支持部34を昇降させることによって、回転ヤトイ31を安定してゆっくりとベース部材32に着座させることができる。そのため、着座時に回転ヤトイ31にほとんど衝撃が伝わらず、回転ヤトイ31を昇降させるワーク保持装置3であっても、変形の虞なく高精度な光学素子を保持することができる。また、回転部35を破損させる虞もない。
【0065】
更に、測定時は、回転ヤトイ31がベース部材32上に着座しているため、回転部35の剛性を上げることなく、回転ヤトイ31が測定時に回転してしまうことを防止することができる。また、回転割出し時は、回転ヤトイ31の背面31Rに支持部34が直接接触して、回転ヤトイ31をベース部材32から浮かせた状態で支持するため、回転部35に出し生じる負荷を軽減することができる。
【0066】
更に、回転ヤトイ31の背面31Rの支持部34が接触し得る支持領域31a及び回転ヤトイ受部32aが接触し得る着座領域31bの面精度を、高精度に形成したことによって、正確に回転ヤトイ31を支持することができる。また、支持部34及び回転ヤトイ受部32aが複数点で回転ヤトイ31を点支持することによって、より平行を保った状態で回転ヤトイ31を支持することができる。
【0067】
更に、上記支持領域31a及び着座領域31bがリング形状をしているため、回転ヤトイ受部32aの全面を高精度に面出しする必要がないと共に、旋盤などを使用して容易に加工することができる。また、支持部34及び回転ヤトイ31が回転してどの位置にあっても、支持部34と支持領域31a、回転ヤトイ受部32aと着座領域31bを接触させることができる。
【0068】
また、支持領域31a及び着座領域31bは、着座領域31bが外径側に位置するように同心円状に配設されており、回転ヤトイ31の支持を回転昇降機構33から装置本体側に切換えた際に、重心が同じであるため、ワークの位置が不安定にならない。更に、回転昇降機構33の回転中心C1とワークWの回転中心が一致しているため、回転中に装置の重心が崩れることがない。また、着座領域31bが支持領域31aの外径側に位置しているため、より安定して測定時にワークWを保持することができる。
【0069】
[第2の実施の形態]
ついで、本発明の第2の実施の形態に係るワーク保持装置3について図7に基づいて説明をする。このワーク保持装置3は、回転ヤトイ31の支持領域31a及び着座領域31bを溝状に形成した点で第1の実施の形態と相異している。そのため、以下、第1の実施形態と相異する部分については説明を省略すると共に、対応する構成要件については、第1の実施形態と同一の参照符号を使用する。
【0070】
図7に示すように、支持領域31a及び着座領域31bは、回転ヤトイ31の背面31Rを溝状に加工して形成されており、この溝部分は他の背面部分31cよりも面精度を高く出されている。
【0071】
また、上記支持領域31aと当接する支持部34は、その先端部の径が支持領域31aの幅W1よりも狭く形成されており、支持領域31aと点接触可能になっている。更に、着座領域31bと当接する回転ヤトイ受部32aも同様に、その先端部の径が着座領域31bの幅W2よりも狭く形成されており、着座領域31bと点接触可能になっている。
【0072】
このように、支持領域31a及び着座領域31bを溝状に形成し、この溝内で支持部34及び回転ヤトイ受部32aと当接するように構成したことによって、回転ヤトイ31が背面31R内で平行移動してしまうことを防止することができる。
【0073】
なお、支持領域31a及び着座領域31bは、回転ヤトイ31の背面31Rに硬度の高いジュラルミンやステンレスなどの金属からなる別部材を取付けて構成しても良い。また、支持領域31aが着座領域31bの外径側に位置しても良い。更に、支持領域31a及び着座領域31bは、リング状だけでなく、例えば円形でも良く、これら支持領域31a及び着座領域31bの両方が円形の場合は、支持領域31a及び着座領域31bが一つの円形領域によって形成される。
【0074】
また、支持部34や回転ヤトイ受部32aは、3つに限らず、一つでも、一つ以上の複数有していても任意の数に設定して良い。更に、ワークWは、非球面、球面、あるいは自由曲面などの大型レンズやミラーなど、高精度の光学素子が最も適しているが、3次元計測装置1は、種々のワークWの表面形状を計測することができる。
【0075】
また、上述した実施の形態に記載された発明は、どのように組み合わされても良いことは、いうまでもない。
【符号の説明】
【0076】
31 回転ヤトイ
31F 保持面
31R 背面
32 ベース部材
32a 回転ヤトイ受部
33 回転昇降機構
34 支持部
35 回転部
36 昇降部
Pup 回転位置
PS 着座位置
W ワーク
【技術分野】
【0001】
本発明は、例えば、半導体露光装置の投影レンズなど高精度の光学素子を保持可能なワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置に関する。
【背景技術】
【0002】
半導体露光装置(ステッパー)は、回路パターンを投影レンズによって縮小し、ウェハー上を移動しながら投影露光する。この投影レンズは、例えば非球面からなる大型レンズから構成され、その形状精度は、1nm〜0.1nm程度の精密さが求められることが知られている。
【0003】
上記ステッパーに使用される投影レンズやミラーなどに代表されるような高精度の光学素子は、求められる形状精度が非常に高いため、平滑研磨装置などによって加工される際に、3次元形状測定装置によって形状を測定しながら加工される。
【0004】
一般に、このような高精度な光学素子の形状を測定する3次元形状測定装置としては、特許文献1に記載されたような、プローブ(スピンドル16)によってワークの表面を走査して形状を測定するものが広く知られている。
【0005】
また、上述した投影レンズなどの大型のレンズの場合、そのサイズがプローブの測定範囲を超えてしまうことがある。そのため、上記特許文献1記載の3次元形状測定装置では、ワークを載置するテーブル103を回転機構165によって回転可能に構成し、一定範囲ごとにワークを走査可能な構成となっている。
【0006】
ところで、投影レンズなどの高精度な光学素子は、上述したようにナノメートル単位でその形状を測定する必要があり、測定時の微小なズレであっても、正確な測定が出来なくなってしまう。
【0007】
ここで、特許文献1記載の3次元形状測定装置は、テーブル103が常に支持第154に回転可能な状態で支持される構成となっている。そのため、測定の際にテーブル103が動きやすいという問題があった。
【0008】
他方、ワークを載置するテーブル(回転テーブル101)として、特許文献2に記載のように、空圧源113からのエアによってテーブル101を浮上させ、このテーブル101を浮上させた後に、回転割り出しを行うものも案出されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開昭59−65702号公報
【特許文献2】特開平11−304460号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献2記載の装置のように、テーブル101を回転させる際には、エアによってテーブルを浮上させると、回転機構に生じる負荷を減らすことができる。また、測定時には、エアの供給を停止し、ベース103上にテーブル101を着座させるため、テーブル101が動いてしまう虞も少ない。
【0011】
しかしながら、上記特許文献2の装置は、エアのオン・オフによってテーブル101を浮かせたり、着座させたりする。そのため、テーブル101を安定して着座させることが難しく、着座の際に衝撃が発生してしまう。そして、テーブル101を安定してゆっくりと着座させられないと、ナノオーダーの形状精度が求められる光学素子では、着座時の衝撃によって形状が変形してしまう虞がある。また、着座の際にテーブルを回転させる回転機構を変形させる虞もある。
【0012】
そこで、本発明は、精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明は、ワークを保持する保持面、該保持面と反対側の背面を有する回転ヤトイと、前記回転ヤトイの背面を着座させる回転ヤトイ受部を有するベース部材と、前記回転ヤトイの背面と接離可能な支持部、該支持部を昇降させる昇降部、前記支持部を回転させる回転部を有する回転昇降機構と、を備え、前記回転昇降機構は、前記昇降部によって上昇させられて前記背面に接触した前記支持部によって、前記回転ヤトイを前記ベース部材から浮かされた状態で支持すると共に、前記回転部により回転し得る回転位置と、前記昇降部によって前記支持部が下降させられて前記背面から離れ、前記回転ヤトイを前記ベース部材に着座させる着座位置と、に昇降駆動させる、ことを特徴とするワーク保持装置にある。
【発明の効果】
【0014】
本発明によれば、ワークを保持する回転ヤトイの背面に接離可能な支持部と、この支持部を昇降させる昇降部と、を有する。そして、回転ヤトイを回転させる際には、支持部を上昇させて回転ヤトイの背面と当接させ、ベース部材から回転ヤトイを浮かせる。また、ワークの形状を測定する際は、支持部を下降させて回転ヤトイの背面から離し、回転ヤトイをベース部材に着座させる。このように、背面に直接接触する支持部材により回転ヤトイを昇降させるため、安定して回転ヤトイを昇降させることができ、高精度な光学素子のようなワークであっても変形させずに保持することができる。また、回転ヤトイをベース部材から浮いた状態で回転させるため、回転部に掛る負荷を軽減することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施の形態に係る3次元形状測定装置を示す模式図。
【図2】本発明の第1の実施の形態に係る3次元形状測定装置を示す側面図。
【図3】本発明の第1の実施の形態に係るワーク保持装置を示す模式図であって、(a)は着座位置を示す図、(b)は回転位置を示す図。
【図4】(a)回転ヤトイを取り外した状態のワーク保持装置、(b)回転ヤトイの背面を示す模式図。
【図5】ワークとプローブの走査範囲との関係を示す模式図。
【図6】大型のワークを測定する際の手順を示す工程図。
【図7】本発明の第2の実施の形態に係るワーク保持装置を示す模式図であって、(a)は着座位置を示す図、(b)は回転位置を示す図。
【発明を実施するための形態】
【0016】
[第1の実施の形態]
[測定装置の概略構成]
以下、図面に基づいて、本発明の実施形態に係る3次元形状測定装置1及びワーク保持装置3について説明をする。なお、以下の説明において「ヤトイ」とは、保持対象を保持する保持具(例えばテーブルなど)としての意味で使用する。
【0017】
まず、図1及び図2に基づいて3次元形状測定装置1の構成について説明をする。図1及び図2に示すように、3次元形状測定装置1は、プローブPによってワークWの表面を走査して、その形状を測定する3次元形状測定装置であり、計測部2、ワーク保持部としてのワーク保持装置3及び制御部4を備えている。
【0018】
上記計測部2は、ワーク保持装置3がその中央部に組み込まれた定盤21と、この定盤21に連結されたステージ架台22と、を有している。ステージ架台22には、Y軸方向に移動自在なY軸ステージ23Y、X軸方向に移動自在なX軸ステージ23X及びZ軸方向に移動自在なZ軸ステージ23Zを介して、プローブPがワーク保持装置3に臨む形で支持されている。
【0019】
上記プローブPは、接触式のプローブから構成されており、ワークWの表面を一定の圧力で接触することが可能なように出来ている。具体的には、プローブ軸を板バネで保持し、板バネの撓み量を変位計等で計測し、撓み量が一定になるように制御するように構成されている。
【0020】
また、定盤21には、プローブP及びワーク保持装置3を跨ぐように、門型のミラーフレーム24が設けられている。このミラーフレーム24には、互いに直交する位置にZ基準ミラー25Zと、Y基準ミラー25Yとが取付けられている。また、X基準ミラー25Xが、これらZ基準ミラー25Z及び、Y基準ミラー25Yのそれぞれと直交する位置に取付けられている。
【0021】
更に、図2に示すように、プローブPには、レーザ測長用Z軸干渉計26Z、レーザ測長用X軸干渉計26X、レーザ測長用Y軸干渉計(不図示)が取付けられている。レーザ測長用Z軸干渉計26Zは、Z基準ミラー25Zとの距離を計測する干渉計である。レーザ測長用X軸干渉計26Xは、X基準ミラー25Xとの距離を計測する干渉計である。レーザ測長用Y軸干渉計は、Y基準ミラー25Yとの距離を計測するレーザ測長用Y軸干渉計である。
【0022】
また、プローブPには、高さ方向にもう一つレーザ測長用干渉計(不図示)が取り付けられており、上下二つの干渉計差を計測することによってY軸方向及びX軸方向のステージピッチング量を測定するように構成されている。
【0023】
このように、計測部2は、X、Y、Z軸それぞれのレーザ測長用干渉計26X,26Zを用いてプローブPの位置を検出する。そして、制御部4からの指令に基づいて、X、Y、Z軸それぞれのステージ23X,23Y,23Zを移動させて、プローブPによってワークWの表面を走査するように構成されている。
【0024】
上記制御部4は、電装ユニット41と、コントロールコンピュータ42と、データ処理用コンピュータ43と、を有している。電装ユニット41は、各種ドライバを搭載しており、例えば、移動ステージ23X,23Y,23Zの駆動モータのドライバ、詳しくは後述するワーク保持装置3の回転用モータ35bのドライバを搭載している。
【0025】
また、電装ユニット41は、接触式プローブPとワークWとの接触圧力を一定に保つようにZ軸ステージ23Zを制御する圧力制御ユニットを搭載している。プローブPとワークWが接触している間は、Z軸ステージドライバに代わり、この圧力制御ユニットによってZ軸ステージ23Zは駆動される。
【0026】
更に、電装ユニット41は、レーザ測長用光源、レーザ測長用干渉計26X,26Zからの測長信号を取り込むための測長ボードを搭載している。
【0027】
一方、コントロールコンピュータ42は、電装ユニット41へ各種信号を出力すると共に、電装ユニット41から信号が入力されるコンピュータである。このコントロールコンピュータ42は、電装ユニット41に搭載された各種ドライバを制御するプログラムが搭載(格納)されている。
【0028】
更に、コントロールコンピュータ42は、各レーザ測長用干渉計からの測長信号を、電装ユニット41を介してサンプリングし、測長データに換算する測長データ取り込み用プログラムを搭載している。
【0029】
また、上記データ処理用コンピュータ43は、測定条件パラメータなどを管理するコンピュータであり、管理する測定条件としては、測定範囲、測定回数、測定速度、測定種類、被測定物の設計値形状などがある。具体的には、データ処理用コンピュータ43は、測定プログラム、データ取込プログラム、形状データ算出プログラム、誤差算出プログラム、形状位置算出プログラム及びつなぎ合わせプログラムを搭載している。
【0030】
上記測定プログラムは、測定条件パラメータを処理して測定手順データとし、測定条件パラメータと共にコントロールコンピュータ42に送る測定プログラムである。上記データ取り込みプログラムは、各レーザ測長用干渉計からの測長データを、コントロールコンピュータ42を介して取り込むプログラムである。上記形状データ算出プログラムは、取り込んだレーザ測長データからワークWの表面形状を算出するプログラムである。上記誤差算出プログラムは、算出したワークWの形状データとワークWの設計値形状から、測定したワークWの設計値からの誤差を算出するプログラムである。上記形状位置算出プログラムは、ワークWの形状データから、ワークWが装置の原点及び座標、或いは任意原点及び座標に対して置かれている三次元位置を算出するプログラムである。上記つなぎ合わせプログラムは、算出したワークWの複数部分の形状データからワークWの全体形状を算出するプログラムである。
【0031】
[ワーク保持装置の詳細構成]
ついで、上述したワーク保持装置3の構成について、図1及び図2を参照しつつ、図3、図4に基づいて詳しく説明をする。図3に示すように、ワーク保持装置3は、定盤21に支持されたベース部材32と、該ベース部材32に着座すると共にワークWが載置される回転ヤトイ31と、上記ベース部材32の下方に配設される回転昇降機構33と、を備えて構成されている。
【0032】
上記回転ヤトイ31は、ワークWを載置するワーク専用ヤトイであり、ワークWを保持する保持面31Fと、この保持面と反対側の背面31Rと、を有する円形の板状部材から構成されている。
【0033】
また、ベース部材32は、定盤21に支持された板状部材からなる汎用ヤトイであり、回転ヤトイ31の背面31Rを着座させる回転ヤトイ受部32aを有している。回転ヤトイ31は、このベース部材32の着座部材に着座することによって、定盤21上に位置決めされ、ワークWの測定が可能な状態となる。
【0034】
更に、ベース部材32の中心には、後述する回転昇降機構33の支持部34が回転ヤトイ31の背面31Rに接続するための孔32hが形成されている。
【0035】
上記回転昇降機構33は、回転ヤトイ31をベース部材32から浮かせた状態で回転させる装置であり、回転ヤトイ31の背面31Rと接離可能な支持部34、支持部34を昇降させる昇降部36、支持部34を回転させる回転部35を有している。
【0036】
上記昇降部36は、4本の脚部36bと、これら複数の脚部36bの間に支持されつつ昇降する昇降ステージ36aと、この昇降ステージ36aを昇降させる直動アクチュエータ36cと、を有している。なお、この直動アクチュエータ36cは、昇降ステージ36aに組込まれていると共に、エアーシリンダーやリニアモータなどから構成されている。
【0037】
上記回転部35は、昇降ステージ36a上に取付けられた回転用モータ35bと、この回転用モータ35bの上部に取付けられて回転する回転部材35aと、を有している。
【0038】
上記支持部34は、回転部材35aの上面から回転ヤトイ31に向かって突出した突状部材であり、回転ヤトイ31の背面31Rと接触する先端部が所定の曲率を有する突形状をしている。即ち、この支持部34は、回転ヤトイ31の背面31Rと点接触するような形状となっている。
【0039】
上述した回転ヤトイ31、ベース部材32及び回転部材35aは、その中心Cが一致するように配設されていると共に、回転部材35aは、その直径がベース部材32の孔32hよりも小さく形成されている。そのため、回転昇降機構33は、回転位置Pup(図3(b)の位置)と、着座位置PS(図3(a)の位置)に昇降駆動する。回転位置Pupは、上記昇降部35によって上昇させられて回転ヤトイ31の背面31Rに接触した支持部34によって、回転ヤトイ31をベース部材32から浮かされた状態で支持される共に、回転部35により回転し得る位置である。着座位置Psは、昇降部35によって支持部34が下降させられて回転ヤトイ31の背面31Rから離れ、ベース部材32に回転ヤトイ31を着座させる位置である。
【0040】
次に、ベース部材32及び回転昇降機構33と、回転ヤトイ31と、の接触関係について図3を参照しつつ、図4に基づいて詳しく説明をする。なお、図4(a)は、ワーク保持装置3から回転ヤトイ31を取り外した状態を示す平面図であり、図4(b)は、回転ヤトイ31の背面を示す模式図である。
【0041】
図4(a)に示すように、回転ヤトイ31の背面31Rと接触する支持部34は、回転部材35aの中心C1から(第1の)所定距離r1、離された円上に3つ配設されており、回転ヤトイ31をこれら3つの支持部34によって3点支持するようになっている。
【0042】
また、同様に回転ヤトイ31の背面31Rが着座する回転ヤトイ受部32aも支持部材35aの中心C1から(第2の)所定距離r2、離された円上に3つ配設されている(r2>r1)。そして、回転ヤトイ31は、これら3つの回転ヤトイ受部32aによって3点支持されている。更に、この回転ヤトイ受部32aは、先端部分が所定の曲率を有する突形状をしており、支持部34と同様に回転ヤトイ31を点支持するようになっている。
【0043】
即ち、上記支持部34及び回転ヤトイ受部32aは、ワークW及び回転ヤトイ31に対して、重心が3点の概略中心に位置するように(本実施形態では中心C1,C2,C3が一致するように)配置されている。言い換えると、ワークW及び回転ヤトイ31が略回転対称形状ならば、支持部34ならびに回転ヤトイ受部32aは概略正三角形の位置に配置されている。
【0044】
一方、図4(b)に示すように、上記支持部34及び回転ヤトイ受部32aと当接する回転ヤトイ31の背面31Rは、支持部34の指示を受得る支持領域31aを有している。また、回転ヤトイ受部32aが着座し得る着座領域31b、これら支持領域及び着座領域以外の背面31cを有して構成されている。
【0045】
上記支持領域31aは、回転部材35aの回転中心C1(本実施形態では中心C1と回転ヤトイ31の中心C2は一致)を中心とする(第1の)所定幅W1を有するリング形状をしており、この幅W1の中央に支持部34の中心C34が位置するようになっている。
【0046】
また、上記着座領域31bは、回転部材35aの回転中心C1を中心とする(第2の)所定幅W2を有するリング形状をしており、この幅W2の中央に回転ヤトイ受部32aの中心C32が位置するようになっている。
【0047】
更に、これら支持領域31a及び着座領域31bは、着座領域31bが外径側に位置した同心円状に配置されており、他の背面31cよりも一段高く削り出されている。また、これら支持領域31a及び着座領域31bは、他の背面31cに比して、面精度が高く出されている。
【0048】
これにより、回転ヤトイ31は、それぞれ面精度の高い支持領域31a、着座領域31bが、支持部34、回転ヤトイ受部32aに3点支持され、回転位置Pupでも、着座位置Psでも精度よく支持されるようになっている。
【0049】
[作用]
ついで、本実施形態に係る3次元形状測定装置1の作用について説明をする。半導体露光装置用の投影レンズ(以下、単純にワークという)Wの表面形状を測定するにあたり計測者は、測定位置に、不図示の搬送系から、回転ヤトイ31に保持されたワークWを、この回転ヤトイ31を搭載したベース部材32ごと搬入する。
【0050】
ワークWが測定位置、即ち、ワーク保持装置3の上方に搬送されると、ベース部材32を定盤21に搭載する。この時、ワークWの大きさがいずれかの基準ミラー25X,25Y,25Zの計測可能範囲、即ちプローブPの走査範囲を超えてしまっている場合ある。この場合、測定者は、プローブP及び回転昇降機構33を制御する制御部(制御装置)4によって、ワーク上におけるプローブPの走査範囲を分割する。そして、回転ヤトイ31を回転させて、分割した領域ごとにプローブPによってワークWの表面を走査させ、ワークWの全範囲について3次元形状を計測する。
【0051】
以下、図5に示すように、ワークWの大きさ(直径Dw)がZ基準ミラー25ZのX方向の計測可能範囲Rxを超えてしまっている場合の、ワークWの3次元形状の測定方法について詳しく説明をする。なお、本実施形態においては、ワークWの大きさに対してZ基準ミラー25Zがカバーする範囲が概略半分なので、接続の重なりを考慮して3回の測定のよってワークの全面の形状を算出する。
【0052】
測定者は、まずワークWの計測に際し、データ処理用コンピュータ43に対してパラメータ、測定範囲及び測定トレース方法を設定する。なお、パラメータとしてはワークの設計データ、測定範囲としてはワークWの基準ミラーと重なる部分(例えば図6のR1部分)、トレース方法としては回転角度120°、測定回数3回及びトレース速度などを入力する。
【0053】
次に、データ処理用コンピュータ43からコントロールコンピュータ42を介して電装ユニット41に指令して、全ての移動ステージ23X,23Y,23Zを原点、又はワークWの搬入、搬出に障害とならない位置まで移動させる。
【0054】
そして、回転ヤトイ31に保持されたワークを、上述したように搬送装置によって、ベース部材32ごと定盤21の測定位置に搬送して、位置決めする。測定位置への位置決めが終了すると、データ処理用コンピュータ43は測定開始指令をコントロールコンピュータ42へ送る。なお、このとき同時に上記設定した各種パラメータもコントロールコンピュータ42へ送る。
【0055】
すると、コントロールコンピュータ42は、プローブPをZ軸の原点位置に位置させ、その後、データ処理用コンピュータ43より送られた各種パラメータに従って、プローブPのXY軸位置を、測定開始点に移動させる。
【0056】
プローブPが測定開始点に移動すると、プローブPを下降させてワーク表面に接触させる。そして、プローブPとワークWとの接触圧が一定の状態で、データ処理用コンピュータ43で設定したパラメータに従って、指定された範囲のワーク表面を走査する。
【0057】
そして、プローブPによって、指定された範囲の走査が終了すると、プローブPをワークWから離し、原点位置まで移動させる。これにより、1回目の測定が終了する。
【0058】
1回目の測定が終了すると、コントロールコンピュータ42は、電装ユニット41を通して回転昇降機構33に上昇指令を与える。回転昇降機構33の直動アクチュエータ36cは、上昇指令を受けると、昇降ステージ36aを上昇させて行き、支持部34を、回転ヤトイ31の背面31Rの支持領域31aに接触させる。そして、この回転ヤトイ31を3つの支持部34によって3点支持した状態で、昇降ステージ36aを更に上昇させ、回転ヤトイ31をベース部材32から浮かせる(図3(b)の回転位置Pup)。
【0059】
回転昇降機構33が回転位置Pupまで上昇すると、コントロールコンピュータ42は、回転用モータ35bを駆動させて、支持部34に支持された回転ヤトイ31を、予め設定された角度(本実施形態では120°)だけ回転させる。
【0060】
そして、回転が終了すると、コントロールコンピュータ42は、回転昇降機構33の直動アクチュエータ36cに下降指令を与え、昇降ステージ36aを着座位置Psまで下降させる。昇降ステージ36aが下降して行くと、回転ヤトイ31の背面31Rの着座領域31bと、回転ヤトイ受部32aとが接触し、3つの回転ヤトイ受部32aに回転ヤトイ31が着座する。そして、この回転ヤトイ31が回転ヤトイ受部32aに3点支持された状態で、支持部34だけが下降して行き、支持部34が支持領域31aから離れる。
【0061】
上記回転ヤトイ31の回転動作(回転割出し)が終了すると、1回目と同様に2回目の表面形状測定が行われる(図5(b)の状態)。そして、2回目の表面形状測定が終了すると、再度、上記回転動作が行われ、3回目の形状測定が行われる(図5(c)の状態)。
【0062】
3回目の形状測定が終了すると、ワークWの全範囲の形状測定が終了し、ワークWをベース部材32ごと搬送装置によって3次元形状測定装置から降ろすと共に、測定したデータをつなぎ合わせて、ワーク全体の形状を演算する。
【0063】
なお、本実施形態のように、ワークWの計測範囲R1,R2,R3は、各測定ごとにその領域が一部被っても良いと共に、被らないように設定しても良い。また、測定を6回など任意の回数も設定しても良い。
【0064】
このように、回転ヤトイ31を背面31Rに直接接触する支持部34を昇降させることによって、回転ヤトイ31を安定してゆっくりとベース部材32に着座させることができる。そのため、着座時に回転ヤトイ31にほとんど衝撃が伝わらず、回転ヤトイ31を昇降させるワーク保持装置3であっても、変形の虞なく高精度な光学素子を保持することができる。また、回転部35を破損させる虞もない。
【0065】
更に、測定時は、回転ヤトイ31がベース部材32上に着座しているため、回転部35の剛性を上げることなく、回転ヤトイ31が測定時に回転してしまうことを防止することができる。また、回転割出し時は、回転ヤトイ31の背面31Rに支持部34が直接接触して、回転ヤトイ31をベース部材32から浮かせた状態で支持するため、回転部35に出し生じる負荷を軽減することができる。
【0066】
更に、回転ヤトイ31の背面31Rの支持部34が接触し得る支持領域31a及び回転ヤトイ受部32aが接触し得る着座領域31bの面精度を、高精度に形成したことによって、正確に回転ヤトイ31を支持することができる。また、支持部34及び回転ヤトイ受部32aが複数点で回転ヤトイ31を点支持することによって、より平行を保った状態で回転ヤトイ31を支持することができる。
【0067】
更に、上記支持領域31a及び着座領域31bがリング形状をしているため、回転ヤトイ受部32aの全面を高精度に面出しする必要がないと共に、旋盤などを使用して容易に加工することができる。また、支持部34及び回転ヤトイ31が回転してどの位置にあっても、支持部34と支持領域31a、回転ヤトイ受部32aと着座領域31bを接触させることができる。
【0068】
また、支持領域31a及び着座領域31bは、着座領域31bが外径側に位置するように同心円状に配設されており、回転ヤトイ31の支持を回転昇降機構33から装置本体側に切換えた際に、重心が同じであるため、ワークの位置が不安定にならない。更に、回転昇降機構33の回転中心C1とワークWの回転中心が一致しているため、回転中に装置の重心が崩れることがない。また、着座領域31bが支持領域31aの外径側に位置しているため、より安定して測定時にワークWを保持することができる。
【0069】
[第2の実施の形態]
ついで、本発明の第2の実施の形態に係るワーク保持装置3について図7に基づいて説明をする。このワーク保持装置3は、回転ヤトイ31の支持領域31a及び着座領域31bを溝状に形成した点で第1の実施の形態と相異している。そのため、以下、第1の実施形態と相異する部分については説明を省略すると共に、対応する構成要件については、第1の実施形態と同一の参照符号を使用する。
【0070】
図7に示すように、支持領域31a及び着座領域31bは、回転ヤトイ31の背面31Rを溝状に加工して形成されており、この溝部分は他の背面部分31cよりも面精度を高く出されている。
【0071】
また、上記支持領域31aと当接する支持部34は、その先端部の径が支持領域31aの幅W1よりも狭く形成されており、支持領域31aと点接触可能になっている。更に、着座領域31bと当接する回転ヤトイ受部32aも同様に、その先端部の径が着座領域31bの幅W2よりも狭く形成されており、着座領域31bと点接触可能になっている。
【0072】
このように、支持領域31a及び着座領域31bを溝状に形成し、この溝内で支持部34及び回転ヤトイ受部32aと当接するように構成したことによって、回転ヤトイ31が背面31R内で平行移動してしまうことを防止することができる。
【0073】
なお、支持領域31a及び着座領域31bは、回転ヤトイ31の背面31Rに硬度の高いジュラルミンやステンレスなどの金属からなる別部材を取付けて構成しても良い。また、支持領域31aが着座領域31bの外径側に位置しても良い。更に、支持領域31a及び着座領域31bは、リング状だけでなく、例えば円形でも良く、これら支持領域31a及び着座領域31bの両方が円形の場合は、支持領域31a及び着座領域31bが一つの円形領域によって形成される。
【0074】
また、支持部34や回転ヤトイ受部32aは、3つに限らず、一つでも、一つ以上の複数有していても任意の数に設定して良い。更に、ワークWは、非球面、球面、あるいは自由曲面などの大型レンズやミラーなど、高精度の光学素子が最も適しているが、3次元計測装置1は、種々のワークWの表面形状を計測することができる。
【0075】
また、上述した実施の形態に記載された発明は、どのように組み合わされても良いことは、いうまでもない。
【符号の説明】
【0076】
31 回転ヤトイ
31F 保持面
31R 背面
32 ベース部材
32a 回転ヤトイ受部
33 回転昇降機構
34 支持部
35 回転部
36 昇降部
Pup 回転位置
PS 着座位置
W ワーク
【特許請求の範囲】
【請求項1】
ワークを保持する保持面、該保持面と反対側の背面を有する回転ヤトイと、
前記回転ヤトイの背面を着座させる回転ヤトイ受部を有するベース部材と、
前記回転ヤトイの背面と接離可能な支持部、該支持部を昇降させる昇降部、前記支持部を回転させる回転部を有する回転昇降機構と、を備え、
前記回転昇降機構は、前記昇降部によって上昇させられて前記背面に接触した前記支持部によって、前記回転ヤトイを前記ベース部材から浮かされた状態で支持すると共に、前記回転部により回転し得る回転位置と、前記昇降部によって前記支持部が下降させられて前記背面から離れ、前記回転ヤトイを前記ベース部材に着座させる着座位置と、に昇降駆動する、
ことを特徴とするワーク保持装置。
【請求項2】
前記背面は、前記支持部の支持を受得る支持領域と、前記回転ヤトイ受部に着座し得る着座領域と、を有し、
前記支持領域及び着座領域は、これら支持領域及び着座領域以外の背面に比して、面精度が高く形成される、
請求項1記載のワーク保持装置。
【請求項3】
前記支持領域及び着座領域は、円形又はリング形状である、
請求項2記載のワーク保持装置。
【請求項4】
前記支持領域及び着座領域は、同心円状に形成される、
請求項3項記載のワーク保持装置。
【請求項5】
前記支持部は、先端部分が所定の曲率を有する突形状であり、
前記回転ヤトイ受部は、先端部分が所定の曲率を有する突形状であり、
これら支持部及び回転ヤトイ受部を、それぞれ複数有する、
請求項1乃至4のいずれか1項記載のワーク保持装置。
【請求項6】
前記回転ヤトイを、前記支持部の回転中心と、その中心が一致するように配設した、
請求項1乃至5のいずれか1項記載のワーク保持装置。
【請求項7】
請求項1乃至6のいずれか1項記載のワーク保持装置と、
ワーク表面を走査するプローブと、
前記プローブ及び回転昇降機構を制御する制御装置と、を備え、
前記制御装置は、ワークの大きさが前記プローブの走査範囲を超えている場合、ワーク上における前記プローブの走査範囲を分割し、前記回転ヤトイを回転させて、分割した領域ごとに前記プローブによってワークの表面を走査させ、ワークの全範囲について3次元形状を計測する、
ことを特徴とする3次元形状測定装置。
【請求項8】
前記ワークは、半導体露光装置用の投影レンズである、
請求項7記載の3次元形状測定装置。
【請求項1】
ワークを保持する保持面、該保持面と反対側の背面を有する回転ヤトイと、
前記回転ヤトイの背面を着座させる回転ヤトイ受部を有するベース部材と、
前記回転ヤトイの背面と接離可能な支持部、該支持部を昇降させる昇降部、前記支持部を回転させる回転部を有する回転昇降機構と、を備え、
前記回転昇降機構は、前記昇降部によって上昇させられて前記背面に接触した前記支持部によって、前記回転ヤトイを前記ベース部材から浮かされた状態で支持すると共に、前記回転部により回転し得る回転位置と、前記昇降部によって前記支持部が下降させられて前記背面から離れ、前記回転ヤトイを前記ベース部材に着座させる着座位置と、に昇降駆動する、
ことを特徴とするワーク保持装置。
【請求項2】
前記背面は、前記支持部の支持を受得る支持領域と、前記回転ヤトイ受部に着座し得る着座領域と、を有し、
前記支持領域及び着座領域は、これら支持領域及び着座領域以外の背面に比して、面精度が高く形成される、
請求項1記載のワーク保持装置。
【請求項3】
前記支持領域及び着座領域は、円形又はリング形状である、
請求項2記載のワーク保持装置。
【請求項4】
前記支持領域及び着座領域は、同心円状に形成される、
請求項3項記載のワーク保持装置。
【請求項5】
前記支持部は、先端部分が所定の曲率を有する突形状であり、
前記回転ヤトイ受部は、先端部分が所定の曲率を有する突形状であり、
これら支持部及び回転ヤトイ受部を、それぞれ複数有する、
請求項1乃至4のいずれか1項記載のワーク保持装置。
【請求項6】
前記回転ヤトイを、前記支持部の回転中心と、その中心が一致するように配設した、
請求項1乃至5のいずれか1項記載のワーク保持装置。
【請求項7】
請求項1乃至6のいずれか1項記載のワーク保持装置と、
ワーク表面を走査するプローブと、
前記プローブ及び回転昇降機構を制御する制御装置と、を備え、
前記制御装置は、ワークの大きさが前記プローブの走査範囲を超えている場合、ワーク上における前記プローブの走査範囲を分割し、前記回転ヤトイを回転させて、分割した領域ごとに前記プローブによってワークの表面を走査させ、ワークの全範囲について3次元形状を計測する、
ことを特徴とする3次元形状測定装置。
【請求項8】
前記ワークは、半導体露光装置用の投影レンズである、
請求項7記載の3次元形状測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−11445(P2013−11445A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−142588(P2011−142588)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]