
ワーク反転装置
【課題】ワークの向きを回転させる際にワークに加わるショックを低減させる。
【解決手段】ワーク反転装置において、ワーク9を受容して回動可能なワーク受容部51と、ワーク9を受容した状態のワーク受容部51の重心が回転中心より一方の側に位置するときワーク受容部51を下方から支持する第1のガイド部61と、重心が回転中心より他方の側に位置するときワーク受容部52を下方から支持する第2のガイド部62とが一体的に接続される、上下方向に移動可能なガイド手段6と、ガイド手段6を上方へ駆動することで第1のガイド部61によってワーク受容部51をワーク9とともに回動させ、ワーク受容部51がワーク9とともに自重によって横転して第2のガイド部62に当接した後、ガイド手段6を下方へ駆動することで第2のガイド部62に支持されるワーク受容部52をさらに回動させるガイド駆動手段とを備える。
【解決手段】ワーク反転装置において、ワーク9を受容して回動可能なワーク受容部51と、ワーク9を受容した状態のワーク受容部51の重心が回転中心より一方の側に位置するときワーク受容部51を下方から支持する第1のガイド部61と、重心が回転中心より他方の側に位置するときワーク受容部52を下方から支持する第2のガイド部62とが一体的に接続される、上下方向に移動可能なガイド手段6と、ガイド手段6を上方へ駆動することで第1のガイド部61によってワーク受容部51をワーク9とともに回動させ、ワーク受容部51がワーク9とともに自重によって横転して第2のガイド部62に当接した後、ガイド手段6を下方へ駆動することで第2のガイド部62に支持されるワーク受容部52をさらに回動させるガイド駆動手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークの搬送経路においてワークを略90度反転させるワーク反転装置に関する。
【背景技術】
【0002】
搬送台車上に縦向きに整列されたワークを横向きとなるよう反転させながら、順次他の搬送台車へと搬送するワーク搬送装置が知られている。例えば、特許文献1には、ワークを収容する容器が固設されたL字型部材を油圧シリンダによって回動させることで、当該容器からワークを排出する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−294448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ワークの搬送経路において上記従来の技術を適用すると、L字型部材によってワークを保持し、当該部材の回動によってワークを反転させることができるが、当該部材の回動に伴ってワークが勢いよく横転するので、横転時のショックがワークに加わり、ワークが破損する可能性がある。
【0005】
本発明は、ワークを反転させる際にワークに加わるショックを低減させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、ワークの搬送経路においてワークを反転させるワーク反転装置において、ワークを受容するV字形状に形成され、V字形状の開口側を回転中心からみて外側にした状態で回動可能なワーク受容部と、ワークを受容した状態のワーク受容部の重心が回転中心より一方の側に位置するときワーク受容部を下方から支持する第1のガイド部と、重心が回転中心より他方の側に位置するときワーク受容部を下方から支持する第2のガイド部とが一体的に接続される、上下方向に移動可能なガイド手段と、ガイド手段を上方へ駆動することで第1のガイド部によってワーク受容部をワークとともに回動させ、ワーク受容部がワークとともに自重によって横転して第2のガイド部に当接した後、ガイド手段を下方へ駆動することで第2のガイド部に支持されるワーク受容部をさらに回動させるガイド駆動手段とを備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、第1のガイド部によってワークを受容するワーク受容部を回動させ、ワーク受容部がワークとともに自重によって横転する際に、ワーク受容部が第2のガイド部に当接して支持されながら回動するので、ワークを反転させるときにワークが勢いよく横転することを防止でき、これによりワークに加わるショックを低減することができる。
【図面の簡単な説明】
【0008】
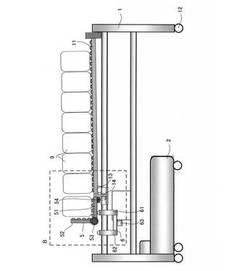
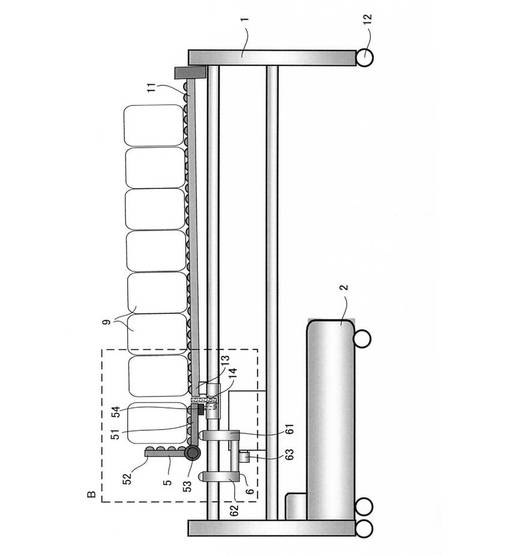
【図1】本実施形態におけるワーク反転装置を搭載したワーク搬送装置の構成を示す構成図である。
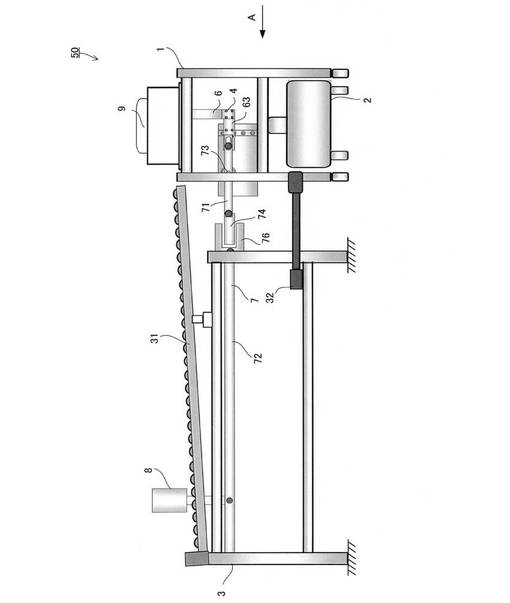
【図2】図1のワーク搬送装置を矢印A方向から見た側面図である。
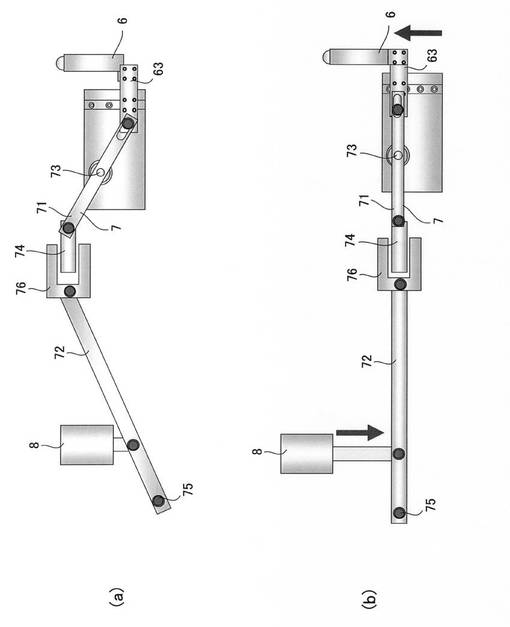
【図3】ガイド駆動手段の作動を示す模式図である。
【図4】ワークを反転させる過程を示す拡大図である。
【発明を実施するための形態】
【0009】
以下では図面を参照して本発明の実施の形態について詳しく説明する。
【0010】
図1は本実施形態におけるワーク反転装置が搭載されたワーク搬送装置の構成を示す構成図である。図2は図1のワーク搬送装置を矢印A方向から見た側面図である。
【0011】
ワーク搬送装置50は、ワーク9を搬送する搬送台車1と、搬送台車1を牽引する無人搬送装置2と、搬送台車1によって搬送されたワーク9を次の工程へと送るために一時的に載置する中間台車3と、ワーク9を反転させるワーク反転装置4とから構成される。ここで、本実施形態ではワーク9の向きを正立方向から横転方向へと90度回転させることを「反転」と表現するが、これに限らずワーク9を所定角度回転させるものに適用可能である。
【0012】
搬送台車1の上部には複数のワーク9を載置するコンベア11が設けられ、搬送台車1の下部にはキャスタ12が設けられる。コンベア11はワーク9が自重によって一方向にスライド可能なように一端に向けて傾斜して設けられる。
【0013】
無人搬送装置2は搬送台車1の下部において搬送台車1と係合し、搬送台車1を中間台車3に隣接する位置まで牽引する。
【0014】
中間台車3は所定位置に固設されており、中間台車3の上部には搬送台車1から送られるワーク9を載置するコンベア31が設けられる。コンベア31はワーク9が自重によって一方向にスライド可能なように一端に向けて傾斜して設けられる。また中間台車3には台車固定機構32が設けられ、台車固定機構32は搬送台車1と係合することで搬送台車1と中間台車3とを固定可能である。
【0015】
ワーク反転装置4は、搬送台車1のコンベア11の終端部13に設けられるV受け5と、V受け5を上方へと押圧するガイド6と、ガイド6を上下方向に駆動するアーム7と、アーム7を駆動するシリンダ8とから構成される。
【0016】
V受け5は、第1の受け部51と、第2の受け部52と、これらを接続する接続部53とから構成され、第1の受け部51と第2の受け部52とのなす角がほぼ90度となるようにV字形状に一体的に構成される。
【0017】
接続部53は、V受け5が接続部53を回転中心として回動可能なように搬送台車1に軸支される。すなわち、V受け5はV字形状の開口側を接続部53からみて外側にした状態で回動する。これにより、ワーク9はV受け5に受容された状態でV受け5とともに回動し、ワーク9の向きが反転される。なお、第1の受け部51と第2の受け部52とのなす角は90度に限らず、その他の角度であってもよい。
【0018】
また、第1の受け部51の先端部であって、第2の受け部52と反対側にはおもり54が固設される。おもり54は、V受け5が図2に示すような初期位置にあるとき、搬送台車1の上部に設けられるストッパ14と当接する。
【0019】
ストッパ14は、上下方向に移動可能なようにJ字型に形成され、図示しないスプリングによって常に上方へと付勢される。上方へと付勢されたストッパ14はワーク9の搬送経路に突出することでワーク9の水平方向の移動を制限する。また、V受け5が初期位置にあるときには、おもり54がストッパ14を下方へと押し込むことでストッパ14はスプリングの付勢力に抗して下方へと移動し、ワーク9の水平方向の移動が許容される。
【0020】
なお、ストッパ14を付勢する部材はスプリングに限らず、ストッパ14を突出させることができる部材であればその他の部材であってもよい。
【0021】
ガイド6は、第1の受け部51に下方から当接して上方へと押圧可能な第1のガイド部61と、第2の受け部52に下方から当接して上方へと押圧可能な第2のガイド部62と、第1のガイド部61と第2のガイド部62とを一体的に連結する連結部63とから構成され、第1のガイド部61と第2のガイド部62とはそれぞれの上端の鉛直方向高さがほぼ等しくなるように互いに平行に配置される。また、第1のガイド部61及び第2のガイド部62の先端は、V受け5との接触抵抗を低減するため半球形状に形成される。
【0022】
なお、第1のガイド部61及び第2のガイド部62の上端の高さはいずれか一方が他方より高くなるように設けてもよい。また第1のガイド部61及び第2のガイド部62は平行に限らず角度をもって配置してもよい。
【0023】
アーム7は、搬送台車1に設けられる搬送台車側アーム71と、中間台車3に設けられる中間台車側アーム72とから構成される。
【0024】
搬送台車側アーム71は、一端がガイド6の連結部63と連結され、他端が搬送台車1から側方へと延出するように設けられ、その中間部73を回転中心として回動可能なように搬送台車1に連結される。搬送台車側アーム71の他端の延出部74は搬送台車側アームに対して回動可能に連結される。
【0025】
中間台車側アーム72は、一端が中間台車3に連結され、他端が中間台車3から側方へと延出するように設けられる。さらに、中間台車側アーム72の他端にはU字形状の連結部76が中間台車側アーム72に対して回動可能に連結される。
【0026】
シリンダ8は中間台車3の上部に設けられ、中間台車側アーム72を上下方向に駆動することでU字形状の連結部76を上下方向に移動させる。
【0027】
ワーク搬送装置50は以上のように構成され、ワーク9を載せた搬送台車1が無人搬送装置2によって中間台車3に隣接する位置まで移動してくると、中間台車側アーム72の右端のU字形状の連結部76に搬送台車側アーム71の左端の延出部74が嵌合される。さらに、搬送台車1が停止した後、台車固定機構32が作動して中間台車3と搬送台車1とは連結固定される。
【0028】
ここで、図3を参照しながらガイド駆動手段としてのアーム7及びシリンダ8の動作について説明する。前述のようにシリンダ8及び中間台車側アーム72は中間台車3に設けられ、ガイド6及び搬送台車側アーム71は搬送台車1に設けられる。
【0029】
搬送台車1が中間台車3に隣接する位置まで移動してくると、図3(a)に示すように搬送台車側アーム71の延出部74が中間台車側アーム72のU字形状の連結部76に嵌合する。この状態から、シリンダ8を下方へと伸長させて中間台車側アーム72を下方へと押し下げると、図3(b)に示すように中間台車側アーム72は左端の中間台車3との連結点75を回転中心として右回りに回動する。
【0030】
これに伴って、U字形状の連結部76に嵌合している搬送台車側アーム71の延出部74が下方へと押し下げられ、搬送台車側アーム71が搬送台車1との連結点73を回転中心として左回りに回動する。これにより、搬送台車側アーム71の右端に連結されたガイド6が上方へと駆動される。
【0031】
また、シリンダ8を上方へと駆動すると中間台車側アーム72が左回りに回動するとともに搬送台車側アーム71が右回りに回動し、ガイド6は下方へと駆動され、図3(a)に示す位置に戻る。
【0032】
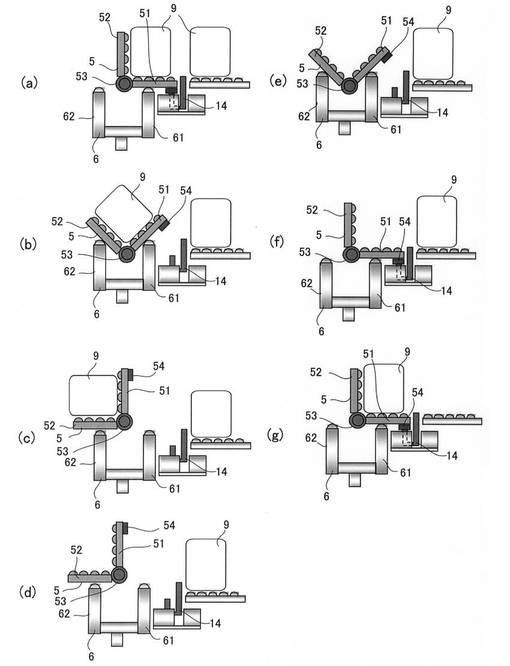
次に、図4を参照しながらワーク反転装置の動作について説明する。図4は図2の範囲Bにおいてワークを反転させる過程を示す拡大図である。
【0033】
図4(a)に示すように、V受け5の第1の受け部51が図中右方向、第2の受け部52が図中上方向を向く初期位置にあるとき、ワーク9がコンベア11からV受け5の第1の受け部51へとスライドする。ワーク9が第1の受け部上にある状態でガイド6を上昇させると、第1のガイド部61が第1の受け部51に当接し、第1の受け部51を上方へと押圧する。これにより、ワーク9はV受け5に受容された状態で接続部53を中心として左回りに回動する。
【0034】
ワーク9が回動してワーク9及びV受け全体の重心位置が接続部53より左側となったとき、ワーク9は自重によって横転してさらに回動し、図4(b)に示すように第2の受け部52が第2のガイド部62に当接した状態となる。
【0035】
このとき、第1の受け部51に設けられるおもり54がV受け5とともに上昇することで、ストッパ14はスプリングの付勢力によって上方へと突出し、次のワーク9の水平方向の移動が規制される。
【0036】
次にガイド6を下降させる。ここで、ワーク9及びV受け5全体の重心位置は接続部53より左側に位置するので、ガイド6の下降に伴ってワーク9及びV受け5は接続部53を中心としてさらに左回りに回動し、図4(c)に示すように第1の受け部51が上方向、第2の受け部52が左方向を向く位置となる。その後、ワーク9を中間台車3へ向けてシュートさせることで図4(d)に示す状態となる。
【0037】
ワーク9をシュートさせた後、再度ガイド6を上昇させる。ガイド6の上昇によって第2のガイド部62が第2の受け部52を上方へと押圧すると、V受け5は右回りに回動する。ここで、第1の受け部51にはおもり54が設けられているので、第1の受け部側は第2の受け部側より重く、V受け5の回動に伴ってV受け5の重心が接続部53より右側に移動すると自重によってさらに回動し、図4(e)に示すように、第1の受け部51が第1のガイド部61に当接する。
【0038】
次にガイド6を下降させると、ガイド6の下降に伴ってV受け5は接続部53を中心としてさらに右回りに回動し、図4(f)に示すようにV受け5が初期位置に戻る。
【0039】
このとき、第1の受け部51に設けられるおもり54がストッパ14を下方へと押し込むので、次のワーク9がV受け5の第1の受け部上へとスライドし、図4(g)に示す状態となる。
【0040】
以降、図4(b)〜(g)の動作を繰り返すことで、搬送台車上のワーク9は順次反転しながら中間台車3へと送られる。
【0041】
以上のように本実施形態では、第1のガイド部61によってワーク9を受容するV受け5を回動させ、ワーク9及びV受け5が自重によって横転する際に、V受け5が第2のガイド部62に当接し、第2のガイド部62に支持されながらさらに回動するので、ワーク9の向きを正立方向から横転方向に反転させるときにワーク9が勢いよく横転することを防止でき、よってワーク9に加わるショックを低減することができる(請求項1に対応)。
【0042】
また、搬送台車1の上部に設けられるストッパ14はスプリングによって搬送経路を遮断する方向に突出可能に付勢され、V受け5が初期位置にあるとき第1の受け部51によって下方へと押し下げられるので、V受け5にワーク9を取り込むときだけストッパ14が解除され、ワーク9をV受け5に搬送することができる。また、V受け5が回動して初期位置以外の位置にあるときには、ストッパ14が搬送経路を遮断するので、ワーク9が搬送経路から落下することを防止することができる(請求項2に対応)。
【0043】
さらに、V受け5の回転中心を挟んで第1の受け部側が第2の受け部側より重くなるように、V受け5の第1の受け部51にはおもり54が設けられるので、V受け5がワーク9を反転させて排出した後、第2のガイド部62を上方へ移動させて第2の受け部52を回動させることで、V受け5は自重によってさらに回動し、第1のガイド部61に当接してガイドされながら初期位置まで戻ることができる(請求項3に対応)。
【0044】
以上説明した実施形態に限定されることなく、その技術的思想の範囲内において種々の変形や変更が可能である。
【符号の説明】
【0045】
1 ワーク
5 V受け(ワーク受容部)
6 ガイド(ガイド手段)
7 アーム(ガイド駆動手段)
8 シリンダ(ガイド駆動手段)
14 ストッパ(遮断部材)
50 ワーク反転装置
51 第1の受け部
52 第2の受け部
61 第1のガイド部
62 第2のガイド部
【技術分野】
【0001】
本発明は、ワークの搬送経路においてワークを略90度反転させるワーク反転装置に関する。
【背景技術】
【0002】
搬送台車上に縦向きに整列されたワークを横向きとなるよう反転させながら、順次他の搬送台車へと搬送するワーク搬送装置が知られている。例えば、特許文献1には、ワークを収容する容器が固設されたL字型部材を油圧シリンダによって回動させることで、当該容器からワークを排出する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−294448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ワークの搬送経路において上記従来の技術を適用すると、L字型部材によってワークを保持し、当該部材の回動によってワークを反転させることができるが、当該部材の回動に伴ってワークが勢いよく横転するので、横転時のショックがワークに加わり、ワークが破損する可能性がある。
【0005】
本発明は、ワークを反転させる際にワークに加わるショックを低減させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、ワークの搬送経路においてワークを反転させるワーク反転装置において、ワークを受容するV字形状に形成され、V字形状の開口側を回転中心からみて外側にした状態で回動可能なワーク受容部と、ワークを受容した状態のワーク受容部の重心が回転中心より一方の側に位置するときワーク受容部を下方から支持する第1のガイド部と、重心が回転中心より他方の側に位置するときワーク受容部を下方から支持する第2のガイド部とが一体的に接続される、上下方向に移動可能なガイド手段と、ガイド手段を上方へ駆動することで第1のガイド部によってワーク受容部をワークとともに回動させ、ワーク受容部がワークとともに自重によって横転して第2のガイド部に当接した後、ガイド手段を下方へ駆動することで第2のガイド部に支持されるワーク受容部をさらに回動させるガイド駆動手段とを備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、第1のガイド部によってワークを受容するワーク受容部を回動させ、ワーク受容部がワークとともに自重によって横転する際に、ワーク受容部が第2のガイド部に当接して支持されながら回動するので、ワークを反転させるときにワークが勢いよく横転することを防止でき、これによりワークに加わるショックを低減することができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態におけるワーク反転装置を搭載したワーク搬送装置の構成を示す構成図である。
【図2】図1のワーク搬送装置を矢印A方向から見た側面図である。
【図3】ガイド駆動手段の作動を示す模式図である。
【図4】ワークを反転させる過程を示す拡大図である。
【発明を実施するための形態】
【0009】
以下では図面を参照して本発明の実施の形態について詳しく説明する。
【0010】
図1は本実施形態におけるワーク反転装置が搭載されたワーク搬送装置の構成を示す構成図である。図2は図1のワーク搬送装置を矢印A方向から見た側面図である。
【0011】
ワーク搬送装置50は、ワーク9を搬送する搬送台車1と、搬送台車1を牽引する無人搬送装置2と、搬送台車1によって搬送されたワーク9を次の工程へと送るために一時的に載置する中間台車3と、ワーク9を反転させるワーク反転装置4とから構成される。ここで、本実施形態ではワーク9の向きを正立方向から横転方向へと90度回転させることを「反転」と表現するが、これに限らずワーク9を所定角度回転させるものに適用可能である。
【0012】
搬送台車1の上部には複数のワーク9を載置するコンベア11が設けられ、搬送台車1の下部にはキャスタ12が設けられる。コンベア11はワーク9が自重によって一方向にスライド可能なように一端に向けて傾斜して設けられる。
【0013】
無人搬送装置2は搬送台車1の下部において搬送台車1と係合し、搬送台車1を中間台車3に隣接する位置まで牽引する。
【0014】
中間台車3は所定位置に固設されており、中間台車3の上部には搬送台車1から送られるワーク9を載置するコンベア31が設けられる。コンベア31はワーク9が自重によって一方向にスライド可能なように一端に向けて傾斜して設けられる。また中間台車3には台車固定機構32が設けられ、台車固定機構32は搬送台車1と係合することで搬送台車1と中間台車3とを固定可能である。
【0015】
ワーク反転装置4は、搬送台車1のコンベア11の終端部13に設けられるV受け5と、V受け5を上方へと押圧するガイド6と、ガイド6を上下方向に駆動するアーム7と、アーム7を駆動するシリンダ8とから構成される。
【0016】
V受け5は、第1の受け部51と、第2の受け部52と、これらを接続する接続部53とから構成され、第1の受け部51と第2の受け部52とのなす角がほぼ90度となるようにV字形状に一体的に構成される。
【0017】
接続部53は、V受け5が接続部53を回転中心として回動可能なように搬送台車1に軸支される。すなわち、V受け5はV字形状の開口側を接続部53からみて外側にした状態で回動する。これにより、ワーク9はV受け5に受容された状態でV受け5とともに回動し、ワーク9の向きが反転される。なお、第1の受け部51と第2の受け部52とのなす角は90度に限らず、その他の角度であってもよい。
【0018】
また、第1の受け部51の先端部であって、第2の受け部52と反対側にはおもり54が固設される。おもり54は、V受け5が図2に示すような初期位置にあるとき、搬送台車1の上部に設けられるストッパ14と当接する。
【0019】
ストッパ14は、上下方向に移動可能なようにJ字型に形成され、図示しないスプリングによって常に上方へと付勢される。上方へと付勢されたストッパ14はワーク9の搬送経路に突出することでワーク9の水平方向の移動を制限する。また、V受け5が初期位置にあるときには、おもり54がストッパ14を下方へと押し込むことでストッパ14はスプリングの付勢力に抗して下方へと移動し、ワーク9の水平方向の移動が許容される。
【0020】
なお、ストッパ14を付勢する部材はスプリングに限らず、ストッパ14を突出させることができる部材であればその他の部材であってもよい。
【0021】
ガイド6は、第1の受け部51に下方から当接して上方へと押圧可能な第1のガイド部61と、第2の受け部52に下方から当接して上方へと押圧可能な第2のガイド部62と、第1のガイド部61と第2のガイド部62とを一体的に連結する連結部63とから構成され、第1のガイド部61と第2のガイド部62とはそれぞれの上端の鉛直方向高さがほぼ等しくなるように互いに平行に配置される。また、第1のガイド部61及び第2のガイド部62の先端は、V受け5との接触抵抗を低減するため半球形状に形成される。
【0022】
なお、第1のガイド部61及び第2のガイド部62の上端の高さはいずれか一方が他方より高くなるように設けてもよい。また第1のガイド部61及び第2のガイド部62は平行に限らず角度をもって配置してもよい。
【0023】
アーム7は、搬送台車1に設けられる搬送台車側アーム71と、中間台車3に設けられる中間台車側アーム72とから構成される。
【0024】
搬送台車側アーム71は、一端がガイド6の連結部63と連結され、他端が搬送台車1から側方へと延出するように設けられ、その中間部73を回転中心として回動可能なように搬送台車1に連結される。搬送台車側アーム71の他端の延出部74は搬送台車側アームに対して回動可能に連結される。
【0025】
中間台車側アーム72は、一端が中間台車3に連結され、他端が中間台車3から側方へと延出するように設けられる。さらに、中間台車側アーム72の他端にはU字形状の連結部76が中間台車側アーム72に対して回動可能に連結される。
【0026】
シリンダ8は中間台車3の上部に設けられ、中間台車側アーム72を上下方向に駆動することでU字形状の連結部76を上下方向に移動させる。
【0027】
ワーク搬送装置50は以上のように構成され、ワーク9を載せた搬送台車1が無人搬送装置2によって中間台車3に隣接する位置まで移動してくると、中間台車側アーム72の右端のU字形状の連結部76に搬送台車側アーム71の左端の延出部74が嵌合される。さらに、搬送台車1が停止した後、台車固定機構32が作動して中間台車3と搬送台車1とは連結固定される。
【0028】
ここで、図3を参照しながらガイド駆動手段としてのアーム7及びシリンダ8の動作について説明する。前述のようにシリンダ8及び中間台車側アーム72は中間台車3に設けられ、ガイド6及び搬送台車側アーム71は搬送台車1に設けられる。
【0029】
搬送台車1が中間台車3に隣接する位置まで移動してくると、図3(a)に示すように搬送台車側アーム71の延出部74が中間台車側アーム72のU字形状の連結部76に嵌合する。この状態から、シリンダ8を下方へと伸長させて中間台車側アーム72を下方へと押し下げると、図3(b)に示すように中間台車側アーム72は左端の中間台車3との連結点75を回転中心として右回りに回動する。
【0030】
これに伴って、U字形状の連結部76に嵌合している搬送台車側アーム71の延出部74が下方へと押し下げられ、搬送台車側アーム71が搬送台車1との連結点73を回転中心として左回りに回動する。これにより、搬送台車側アーム71の右端に連結されたガイド6が上方へと駆動される。
【0031】
また、シリンダ8を上方へと駆動すると中間台車側アーム72が左回りに回動するとともに搬送台車側アーム71が右回りに回動し、ガイド6は下方へと駆動され、図3(a)に示す位置に戻る。
【0032】
次に、図4を参照しながらワーク反転装置の動作について説明する。図4は図2の範囲Bにおいてワークを反転させる過程を示す拡大図である。
【0033】
図4(a)に示すように、V受け5の第1の受け部51が図中右方向、第2の受け部52が図中上方向を向く初期位置にあるとき、ワーク9がコンベア11からV受け5の第1の受け部51へとスライドする。ワーク9が第1の受け部上にある状態でガイド6を上昇させると、第1のガイド部61が第1の受け部51に当接し、第1の受け部51を上方へと押圧する。これにより、ワーク9はV受け5に受容された状態で接続部53を中心として左回りに回動する。
【0034】
ワーク9が回動してワーク9及びV受け全体の重心位置が接続部53より左側となったとき、ワーク9は自重によって横転してさらに回動し、図4(b)に示すように第2の受け部52が第2のガイド部62に当接した状態となる。
【0035】
このとき、第1の受け部51に設けられるおもり54がV受け5とともに上昇することで、ストッパ14はスプリングの付勢力によって上方へと突出し、次のワーク9の水平方向の移動が規制される。
【0036】
次にガイド6を下降させる。ここで、ワーク9及びV受け5全体の重心位置は接続部53より左側に位置するので、ガイド6の下降に伴ってワーク9及びV受け5は接続部53を中心としてさらに左回りに回動し、図4(c)に示すように第1の受け部51が上方向、第2の受け部52が左方向を向く位置となる。その後、ワーク9を中間台車3へ向けてシュートさせることで図4(d)に示す状態となる。
【0037】
ワーク9をシュートさせた後、再度ガイド6を上昇させる。ガイド6の上昇によって第2のガイド部62が第2の受け部52を上方へと押圧すると、V受け5は右回りに回動する。ここで、第1の受け部51にはおもり54が設けられているので、第1の受け部側は第2の受け部側より重く、V受け5の回動に伴ってV受け5の重心が接続部53より右側に移動すると自重によってさらに回動し、図4(e)に示すように、第1の受け部51が第1のガイド部61に当接する。
【0038】
次にガイド6を下降させると、ガイド6の下降に伴ってV受け5は接続部53を中心としてさらに右回りに回動し、図4(f)に示すようにV受け5が初期位置に戻る。
【0039】
このとき、第1の受け部51に設けられるおもり54がストッパ14を下方へと押し込むので、次のワーク9がV受け5の第1の受け部上へとスライドし、図4(g)に示す状態となる。
【0040】
以降、図4(b)〜(g)の動作を繰り返すことで、搬送台車上のワーク9は順次反転しながら中間台車3へと送られる。
【0041】
以上のように本実施形態では、第1のガイド部61によってワーク9を受容するV受け5を回動させ、ワーク9及びV受け5が自重によって横転する際に、V受け5が第2のガイド部62に当接し、第2のガイド部62に支持されながらさらに回動するので、ワーク9の向きを正立方向から横転方向に反転させるときにワーク9が勢いよく横転することを防止でき、よってワーク9に加わるショックを低減することができる(請求項1に対応)。
【0042】
また、搬送台車1の上部に設けられるストッパ14はスプリングによって搬送経路を遮断する方向に突出可能に付勢され、V受け5が初期位置にあるとき第1の受け部51によって下方へと押し下げられるので、V受け5にワーク9を取り込むときだけストッパ14が解除され、ワーク9をV受け5に搬送することができる。また、V受け5が回動して初期位置以外の位置にあるときには、ストッパ14が搬送経路を遮断するので、ワーク9が搬送経路から落下することを防止することができる(請求項2に対応)。
【0043】
さらに、V受け5の回転中心を挟んで第1の受け部側が第2の受け部側より重くなるように、V受け5の第1の受け部51にはおもり54が設けられるので、V受け5がワーク9を反転させて排出した後、第2のガイド部62を上方へ移動させて第2の受け部52を回動させることで、V受け5は自重によってさらに回動し、第1のガイド部61に当接してガイドされながら初期位置まで戻ることができる(請求項3に対応)。
【0044】
以上説明した実施形態に限定されることなく、その技術的思想の範囲内において種々の変形や変更が可能である。
【符号の説明】
【0045】
1 ワーク
5 V受け(ワーク受容部)
6 ガイド(ガイド手段)
7 アーム(ガイド駆動手段)
8 シリンダ(ガイド駆動手段)
14 ストッパ(遮断部材)
50 ワーク反転装置
51 第1の受け部
52 第2の受け部
61 第1のガイド部
62 第2のガイド部
【特許請求の範囲】
【請求項1】
ワークの搬送経路において前記ワークを反転させるワーク反転装置において、
前記ワークを受容するV字形状に形成され、前記V字形状の開口側を回転中心からみて外側にした状態で回動可能なワーク受容部と、
前記ワークを受容した状態の前記ワーク受容部の重心が前記回転中心より一方の側に位置するとき前記ワーク受容部を下方から支持する第1のガイド部と、前記重心が前記回転中心より他方の側に位置するとき前記ワーク受容部を下方から支持する第2のガイド部とが一体的に接続される、上下方向に移動可能なガイド手段と、
前記ガイド手段を上方へ駆動することで前記第1のガイド部によって前記ワーク受容部を前記ワークとともに回動させ、前記ワーク受容部が前記ワークとともに自重によって横転して前記第2のガイド部に当接した後、前記ガイド手段を下方へ駆動することで前記第2のガイド部に支持される前記ワーク受容部をさらに回動させるガイド駆動手段と、
を備えることを特徴とするワーク反転装置。
【請求項2】
前記ワーク受容部より上流側に設けられ、突出することで前記ワークの前記搬送経路を遮断する遮断部材と、
前記遮断部材を突出させる方向に付勢する付勢手段と、
を備え、
前記遮断部材は、前記ワーク受容部が前記ワークを取り込む所定の向きにあるとき、前記ワーク受容部によって前記付勢手段の付勢力に抗して押し下げられることを特徴とする請求項1に記載のワーク反転装置。
【請求項3】
前記ワーク受容部は、前記第1のガイド部が支持する第1の受け部と前記第2のガイド部が支持する第2の受け部からなり、前記第1の受け部は前記第2の受け部より重くなるように設定され、
前記ガイド駆動手段は、前記ワーク受容部が前記ワークを排出した後、前記ガイド手段を上方へ駆動することで前記第2のガイド部によって前記ワーク受容部を回動させ、前記ワーク受容部が自重によって横転して前記第1のガイド部に当接した後、前記ガイド手段を下方へ駆動することで前記第1のガイド部に支持される前記ワーク受容部をさらに回動させることを特徴とする請求項1又は2に記載のワーク反転装置。
【請求項1】
ワークの搬送経路において前記ワークを反転させるワーク反転装置において、
前記ワークを受容するV字形状に形成され、前記V字形状の開口側を回転中心からみて外側にした状態で回動可能なワーク受容部と、
前記ワークを受容した状態の前記ワーク受容部の重心が前記回転中心より一方の側に位置するとき前記ワーク受容部を下方から支持する第1のガイド部と、前記重心が前記回転中心より他方の側に位置するとき前記ワーク受容部を下方から支持する第2のガイド部とが一体的に接続される、上下方向に移動可能なガイド手段と、
前記ガイド手段を上方へ駆動することで前記第1のガイド部によって前記ワーク受容部を前記ワークとともに回動させ、前記ワーク受容部が前記ワークとともに自重によって横転して前記第2のガイド部に当接した後、前記ガイド手段を下方へ駆動することで前記第2のガイド部に支持される前記ワーク受容部をさらに回動させるガイド駆動手段と、
を備えることを特徴とするワーク反転装置。
【請求項2】
前記ワーク受容部より上流側に設けられ、突出することで前記ワークの前記搬送経路を遮断する遮断部材と、
前記遮断部材を突出させる方向に付勢する付勢手段と、
を備え、
前記遮断部材は、前記ワーク受容部が前記ワークを取り込む所定の向きにあるとき、前記ワーク受容部によって前記付勢手段の付勢力に抗して押し下げられることを特徴とする請求項1に記載のワーク反転装置。
【請求項3】
前記ワーク受容部は、前記第1のガイド部が支持する第1の受け部と前記第2のガイド部が支持する第2の受け部からなり、前記第1の受け部は前記第2の受け部より重くなるように設定され、
前記ガイド駆動手段は、前記ワーク受容部が前記ワークを排出した後、前記ガイド手段を上方へ駆動することで前記第2のガイド部によって前記ワーク受容部を回動させ、前記ワーク受容部が自重によって横転して前記第1のガイド部に当接した後、前記ガイド手段を下方へ駆動することで前記第1のガイド部に支持される前記ワーク受容部をさらに回動させることを特徴とする請求項1又は2に記載のワーク反転装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−16647(P2011−16647A)
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願番号】特願2009−164089(P2009−164089)
【出願日】平成21年7月10日(2009.7.10)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願日】平成21年7月10日(2009.7.10)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]