
ワーク反転装置
【課題】ワークを省スペースで反転させるとともにワークの反転に要する力を省力化する。
【解決手段】本発明は、ワークの上下を反転させるワーク反転装置100であって、ワークが載置されるとともに反転軸11を中心として反転可能であって、反転軸11が自身の幅方向の略中央部を貫く反転トレー20と、反転軸11に平行であって反転トレー20上に設けられる揺動軸26に連結され、反転トレー20に対して揺動してワークを挟持可能な揺動トレー30と、反転トレー20の反転に伴って、揺動トレー30を反転トレー20に対して開状態から閉状態まで揺動させるガイド機構40とを備える。
【解決手段】本発明は、ワークの上下を反転させるワーク反転装置100であって、ワークが載置されるとともに反転軸11を中心として反転可能であって、反転軸11が自身の幅方向の略中央部を貫く反転トレー20と、反転軸11に平行であって反転トレー20上に設けられる揺動軸26に連結され、反転トレー20に対して揺動してワークを挟持可能な揺動トレー30と、反転トレー20の反転に伴って、揺動トレー30を反転トレー20に対して開状態から閉状態まで揺動させるガイド機構40とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークの上下を反転させるワーク反転装置に関する。
【背景技術】
【0002】
ワークの向きを上下反転させるワーク反転装置が知られている。例えば、特許文献1には、水平方向の軸を支点として回転可能なブロックと、ブロックに設けられた垂直方向の軸を支点として回動可能な2つのアームとを備え、2つのアームによってワークを両側から把持した状態でブロックを回転させることで、ワークを上下反転させるワーク反転装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−75921号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の技術では、ワークを反転させるためにブロックを回転させると、ブロックの回転軸を中心としてアームの長さを半径とする円周上をワークが移動することになるので、その分だけクリアランスが必要となり、ワーク反転装置全体として水平方向及び垂直方向に大きなスペースを必要とする。また、ワーク反転時にワークの重心が垂直上方にアームの半径分だけ一度上昇するので、ワークを反転させるのに大きな力が必要となる。
【0005】
本発明は、ワークを省スペースで反転させるとともにワークの反転に要する力を省力化することを目的とする。
【課題を解決するための手段】
【0006】
本発明のある態様によれば、ワークの上下を反転させるワーク反転装置であって、ワークが載置されるとともに反転軸線を中心として反転可能であって、反転軸線が自身の幅方向の略中央部を貫く反転体と、反転軸線に平行であって反転体上に設けられる支軸に連結され、反転体に対して揺動してワークを挟持可能な揺動体と、反転体の反転に伴って、揺動体を反転体に対して開状態から閉状態まで揺動させるガイド機構とを備えることを特徴とするワーク反転装置が提供される。
【発明の効果】
【0007】
上記の態様によれば、反転体の反転軸線が反転体の幅方向の略中央部を貫くように配置されるので、反転体の反転軸線に対する径方向の寸法を小さくすることができ、その分反転体の回転半径が短縮されるので、反転に要するスペースを省スペース化することができる。また、ワークと反転軸線との距離を短縮することができるので、反転時におけるワークの垂直方向の重心移動量を抑制することができ、よってワーク反転に要する力を省力化することができる。
【図面の簡単な説明】
【0008】
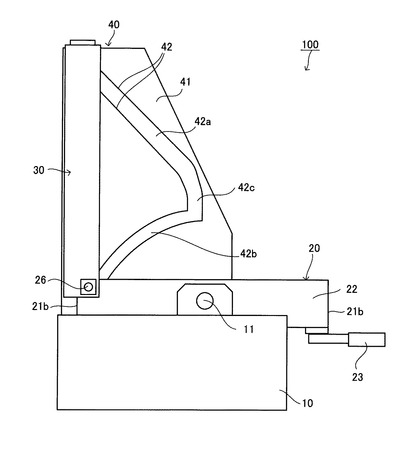
【図1】本実施形態におけるワーク反転装置の構成を示す平面図である。
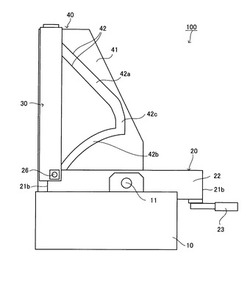
【図2】本実施形態におけるワーク反転装置の構成を示す側面図である。
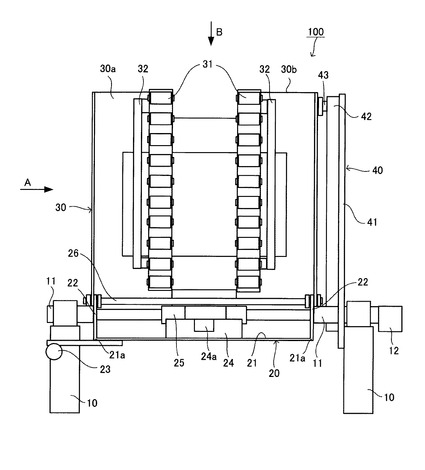
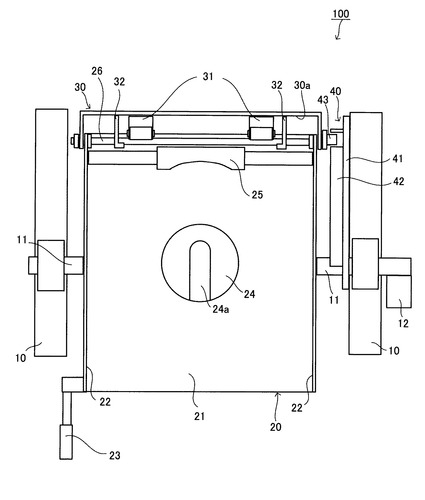
【図3】本実施形態におけるワーク反転装置の構成を示す上面図である。
【図4】本実施形態におけるワーク反転装置の動作を示す側面図である。
【図5】本実施形態におけるワーク反転装置の動作を示す側面図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0010】
図1は本実施形態におけるワーク反転装置100の構成を示す平面図であり、図2は図1のワーク反転装置100を矢印A方向から見た側面図であり、図3は図1のワーク反転装置100を矢印B方向から見た上面図である。
【0011】
ワーク反転装置100は、所定の間隔をあけて平行に配置される一対の基台10と、基台10の間で反転可能に軸支される反転トレー20と、反転トレー20に揺動可能に連結される揺動トレー30と、揺動トレー30の動きをガイドするガイド機構40とから構成される。
【0012】
反転トレー20は、ワークを載置する載置面21と、図1において載置面21の両端21a(図1の左右端)から上方へと延設される側壁22とから構成され、側壁22の長手方向(図2の左右方向)ほぼ中央(反転トレーの幅方向のほぼ中央)において、基台10に軸支される反転軸11に連結される。これにより、反転軸11はワークを貫く位置に配置されることとなり、反転トレー20は載置面21の長手方向両端21b(側壁のない側)を反転軸11から見て外側にした状態で上下反転可能である。
【0013】
また、反転トレー20は、反転トレー20を反転させるレバーハンドル23と、載置面21に載置されるワークの位置決めを行う位置決め部材24と、ワークのスライドを規制するストッパ25とを備える。
【0014】
ここで、ワークは例えばトルクコンバータであり、作業者がワークを載置面21へと載置してもよいし、コンベアなどから直接載置面21へとシュートする構造としてもよい。
【0015】
レバーハンドル23は、反転トレー20の一端に設けられ、作業者がレバーハンドル23を上方へと持ち上げることで、反転トレー20が反転軸11を中心として上下反転する。
【0016】
位置決め部材24は、載置面21のほぼ中心に設けられ、反転トレー20に載置されたワークの下面の一部と嵌合することで、特に反転トレー20の反転軸線方向に対するワークの位置決めを行う。位置決め部材24の形状はワークの下面の一部と嵌合するようにワークの形状に応じて適宜設定される。これにより、ワークは反転トレー20のほぼ中央に載置される。なお、本実施形態ではワークがトルクコンバータであるので、トルクコンバータの出力軸が嵌合するように位置決め部材24の上面に溝24aが形成される。
【0017】
ストッパ25は、側壁22の一端であってレバーハンドル23とは反対側の端部に設けられ、位置決め部材24に載置されたワークのスライドを規制する。
【0018】
揺動トレー30は、図1、図2における下方端において反転トレー20の反転軸11と平行に反転トレー20に軸支される揺動軸26に連結される。すなわち、揺動トレー30の揺動軸26は反転トレー20の反転に伴って揺動する。また、揺動トレー30は、ワークをシュートさせる一対のローラコンベア31と、ワークのシュート方向をガイドするシュートガイド32とを備える。
【0019】
一対のローラコンベア31は、揺動トレー30の面のうち反転トレー20側の面30aに並設され、ワークを上下反転した後に、揺動トレー30に支持されるワークを自重によってシュートさせる。シュートガイド32は、一対のローラコンベア31の外側にローラコンベア31と平行に設けられ、ワークのシュート方向以外の方向への移動を規制する。
【0020】
ガイド機構40は、基台10から上方へ向けて延設される延設部材41と、延設部材41に設けられる一対のガイドレール42と、揺動トレー30に突設される係合突起43とを備える。
【0021】
延設部材41は、一方の基台10に固定され、基台10から揺動トレー30の上方端部30bまでに亘って延設される。なお、反転軸11は延設部材41を貫通するように設けられているので、反転軸11は延設部材41に干渉することなく回転可能である。
【0022】
一対のガイドレール42は、延設部材41における揺動トレー30側の面に所定の間隔で並設される。所定の間隔は係合突起43がガイドレール42間で摺動可能な程度に設定される。また、ガイドレール42は揺動トレー30から反転トレー20側へと斜め下方に下降する第1の経路42aと、第1の経路42aの下端から折り返して反転トレー20の反転軸11を中心とするほぼ円周上を下降する第2の経路42bとから構成される。したがって、ガイドレール42は、図2に示すように上下方向中央42cで屈曲したくの字型に配置される。さらに、第2の経路42bの下端は反転軸11より垂直方向下方側に配置される。
【0023】
係合突起43は揺動トレー30の上方端部30bから延設部材41へ向けて凸形状に延設され、ガイドレール42に沿って摺動することで反転トレー20の反転時における揺動トレー30の動き、特に傾きを規定する。
【0024】
また、反転トレー20の反転軸11であって基台10より外側にはおもり12が設けられており、これにより反転トレー20には、常にレバーハンドル23によって加えられる力の向きとは反対方向の力が付与される。したがって、作業者がレバーハンドル23に触れていない場合には、反転トレー20及び揺動トレー30は図1〜図3に示す位置にあり、これを初期位置とする。
【0025】
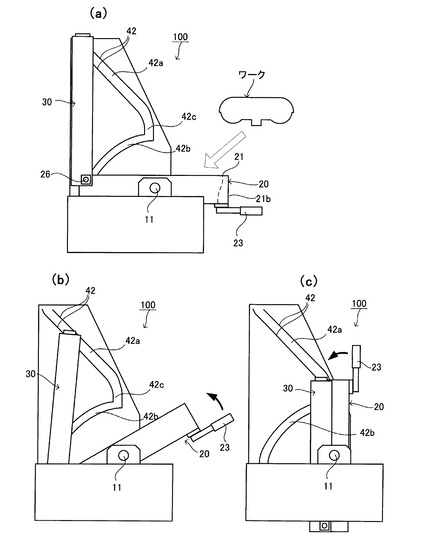
次に、上記のように構成されるワーク反転装置100の動作について説明する。図4及び図5は、ワーク反転装置100の動作の過程を(a)から(e)へと順に示す側面図であり、(a)〜(c)は図4に示し、(d)及び(e)は図5に示す。
【0026】
図4(a)に示すように、作業者がワークを反転トレー20の載置面21に載置する。ワークは、ワークの下面の一部が載置面21に配置された位置決め部材24と嵌合するように載置される。
【0027】
作業者がレバーハンドル23を持ち上げると、図4(b)に示すように、反転トレー20が反転軸11を中心として回動する。これに伴って揺動トレー30の揺動軸26が反転トレー20とともに下方に移動するので、揺動トレー30の係合突起43がガイドレール42に沿って摺動しながら揺動トレー30全体が下方へと移動する。これにより、揺動トレー30と反転トレー20とのなす角は反転トレー20の反転に応じて徐々に減少し、揺動トレー30がワークに近接していく。
【0028】
反転トレー20がさらに回動し、図4(c)に示すようにほぼ直立状態となると、係合突起43はガイドレール42の第1の経路42aの下端42c(屈曲部)まで下降し、揺動トレー30もほぼ直立状態となる。これにより、ワークは反転トレー20と揺動トレー30とによって挟持される。なお、ワークは必ずしも反転トレー20と揺動トレー30とに同時に当接するように挟持される必要はなく、反転トレー20と揺動トレー30との間にワークが保持されていればよい。
【0029】
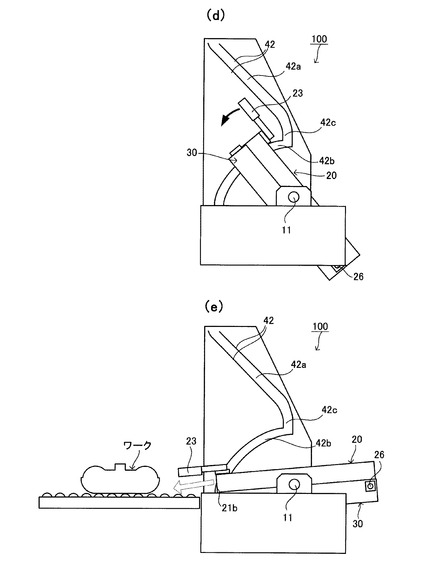
反転トレー20がさらに回動すると、図5(d)に示すように、反転トレー20と揺動トレー30とは一体的に回動し、ワークは主に揺動トレー30に保持された状態となる。ここで、揺動トレー30には自重により反転トレー20に設けられる揺動軸26を支点として回動する方向に力が作用するが、ガイドレール42の第2の経路42bは、反転トレー20の反転軸11を中心としたほぼ円周上に形成されるので、揺動トレー30が反転トレー20から離間することはなく、反転終了まで揺動トレー30と反転トレー20とが一体的に回動する。
【0030】
係合突起43がガイドレール42の第2の経路42bの下端まで到達すると、図5(e)に示すように、反転トレー20及び揺動トレー30の回動は規制される。第2の経路42bの下端は反転軸11より垂直方向下方側に配置されるので、反転トレー20及び揺動トレー30は水平より少しだけ傾斜した状態となる。すなわち、反転トレー20の端部21bであってレバーハンドル23側の端部21bが反転軸11より下方に位置する状態となる。これにより、ワークは揺動トレー30に設けられたローラコンベア31上を自重によって滑り落ち、ワーク反転装置100とは別に設けられる所定のシュート位置へとシュートされる。
【0031】
その後、作業者がレバーハンドル23から手を離すと、反転軸11に固定されたおもり12によって反転トレー20は逆回転し、揺動トレー30とともに上記過程に沿って初期位置まで戻る。
【0032】
図4及び図5からも明らかなように、以上の動作により、ワークは反転トレー20とともに水平状態から垂直状態となるまで傾転され、垂直状態となった時、反転トレー20から離間するとともに揺動トレー30に当接し、その後、揺動トレー30とともに垂直状態から水平状態となるまで傾転される。これらの動作により、ワークは180度回転して上下反転される。
【0033】
以上のように本実施形態では、反転トレー20の反転軸11は反転トレー20の幅方向のほぼ中央に配置されるので、反転トレー20の反転軸11に対する径方向の寸法を小さくすることができ、その分反転トレー20の反転時における回転半径が短縮されるので、反転に要するスペースを省スペース化することができる。また、ワークと反転軸11との距離を短縮することができるので、反転時におけるワークの垂直方向の重心移動量を抑制することができ、ワークを反転させるのに要する力を省力化することができる(請求項1に対応)。
【0034】
また、ワークは反転トレー20のほぼ中央に載置されるので、反転軸11がワークの重心を貫くように配置されることとなり、反転時に反転トレー20がほぼ自転することにより、反転トレー20の回転半径をさらに短縮することができる。これにより、反転に要するスペースをさらに小さくすることができるとともに、ワークの重心と反転軸11との距離が短縮されるので、ワークを反転させるのに要する力をさらに省力化することができる(請求項2に対応)。
【0035】
さらに、ガイドレール42は、反転トレー20が反転を開始してから直立状態となるまでの間、揺動トレー30が反転トレー20に対して開状態から閉状態となるまで徐々に揺動することで、揺動トレー30と反転トレー20とのなす角が徐々に減少して揺動トレー30がワークに近接対面するように揺動トレー30をガイドする第1の経路42aと、反転トレー20が直立状態となってから反転トレー20の反転が終了するまでの間、揺動トレー30と反転トレー20とが閉状態のままで一体的に反転するように揺動トレー30をガイドする第2の経路42bとから構成される。
【0036】
これにより、ワークを載置する際には載置面21の上方が開放されてワークを容易に載置することができるとともに、反転トレー20が直立状態となってワークが反転トレー20から離間するまでに揺動トレー30をワークに近接対面させることができる。よって、ワークの反転動作に際し、新たにワークを挟持する動作を必要とせず、単に反転トレー20を反転させる動作を行うだけで揺動トレー30を近接させてワークを支持させることができるので、ワークの反転動作を簡素化しながらワークを反転トレー20から落下させることなく、より確実に反転させることができる(請求項3に対応)。
【0037】
さらに、揺動トレー30はローラコンベア31を有し、第2の経路42bの下端は反転軸11より下方に配置されるので、反転トレー20を反転させた後、ワークが自重によってローラコンベア31上をシュートして搬出されるので、反転後に揺動トレー30からワークを取り除く動作を省略することができ、ワークの反転動作をさらに簡素化することができる(請求項4に対応)。
【0038】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例を示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。本発明の趣旨を逸脱しない範囲で種々の変更が可能である。
【0039】
例えば、上記実施形態では、反転トレー20を作業者が人力で反転させる構成としたが、アクチュエータなどによって反転トレー20を反転させる構成であってもよい。
【符号の説明】
【0040】
11 反転軸(反転軸線)
20 反転トレー(反転体)
21 載置面
26 揺動軸(支軸)
30 揺動トレー(揺動体)
31 ローラコンベア(コンベア)
40 ガイド機構
42 ガイド部
42a 第1の経路
42b 第2の経路
43 係合突起(突起部)
100 ワーク反転装置
【技術分野】
【0001】
本発明は、ワークの上下を反転させるワーク反転装置に関する。
【背景技術】
【0002】
ワークの向きを上下反転させるワーク反転装置が知られている。例えば、特許文献1には、水平方向の軸を支点として回転可能なブロックと、ブロックに設けられた垂直方向の軸を支点として回動可能な2つのアームとを備え、2つのアームによってワークを両側から把持した状態でブロックを回転させることで、ワークを上下反転させるワーク反転装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−75921号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記従来の技術では、ワークを反転させるためにブロックを回転させると、ブロックの回転軸を中心としてアームの長さを半径とする円周上をワークが移動することになるので、その分だけクリアランスが必要となり、ワーク反転装置全体として水平方向及び垂直方向に大きなスペースを必要とする。また、ワーク反転時にワークの重心が垂直上方にアームの半径分だけ一度上昇するので、ワークを反転させるのに大きな力が必要となる。
【0005】
本発明は、ワークを省スペースで反転させるとともにワークの反転に要する力を省力化することを目的とする。
【課題を解決するための手段】
【0006】
本発明のある態様によれば、ワークの上下を反転させるワーク反転装置であって、ワークが載置されるとともに反転軸線を中心として反転可能であって、反転軸線が自身の幅方向の略中央部を貫く反転体と、反転軸線に平行であって反転体上に設けられる支軸に連結され、反転体に対して揺動してワークを挟持可能な揺動体と、反転体の反転に伴って、揺動体を反転体に対して開状態から閉状態まで揺動させるガイド機構とを備えることを特徴とするワーク反転装置が提供される。
【発明の効果】
【0007】
上記の態様によれば、反転体の反転軸線が反転体の幅方向の略中央部を貫くように配置されるので、反転体の反転軸線に対する径方向の寸法を小さくすることができ、その分反転体の回転半径が短縮されるので、反転に要するスペースを省スペース化することができる。また、ワークと反転軸線との距離を短縮することができるので、反転時におけるワークの垂直方向の重心移動量を抑制することができ、よってワーク反転に要する力を省力化することができる。
【図面の簡単な説明】
【0008】
【図1】本実施形態におけるワーク反転装置の構成を示す平面図である。
【図2】本実施形態におけるワーク反転装置の構成を示す側面図である。
【図3】本実施形態におけるワーク反転装置の構成を示す上面図である。
【図4】本実施形態におけるワーク反転装置の動作を示す側面図である。
【図5】本実施形態におけるワーク反転装置の動作を示す側面図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0010】
図1は本実施形態におけるワーク反転装置100の構成を示す平面図であり、図2は図1のワーク反転装置100を矢印A方向から見た側面図であり、図3は図1のワーク反転装置100を矢印B方向から見た上面図である。
【0011】
ワーク反転装置100は、所定の間隔をあけて平行に配置される一対の基台10と、基台10の間で反転可能に軸支される反転トレー20と、反転トレー20に揺動可能に連結される揺動トレー30と、揺動トレー30の動きをガイドするガイド機構40とから構成される。
【0012】
反転トレー20は、ワークを載置する載置面21と、図1において載置面21の両端21a(図1の左右端)から上方へと延設される側壁22とから構成され、側壁22の長手方向(図2の左右方向)ほぼ中央(反転トレーの幅方向のほぼ中央)において、基台10に軸支される反転軸11に連結される。これにより、反転軸11はワークを貫く位置に配置されることとなり、反転トレー20は載置面21の長手方向両端21b(側壁のない側)を反転軸11から見て外側にした状態で上下反転可能である。
【0013】
また、反転トレー20は、反転トレー20を反転させるレバーハンドル23と、載置面21に載置されるワークの位置決めを行う位置決め部材24と、ワークのスライドを規制するストッパ25とを備える。
【0014】
ここで、ワークは例えばトルクコンバータであり、作業者がワークを載置面21へと載置してもよいし、コンベアなどから直接載置面21へとシュートする構造としてもよい。
【0015】
レバーハンドル23は、反転トレー20の一端に設けられ、作業者がレバーハンドル23を上方へと持ち上げることで、反転トレー20が反転軸11を中心として上下反転する。
【0016】
位置決め部材24は、載置面21のほぼ中心に設けられ、反転トレー20に載置されたワークの下面の一部と嵌合することで、特に反転トレー20の反転軸線方向に対するワークの位置決めを行う。位置決め部材24の形状はワークの下面の一部と嵌合するようにワークの形状に応じて適宜設定される。これにより、ワークは反転トレー20のほぼ中央に載置される。なお、本実施形態ではワークがトルクコンバータであるので、トルクコンバータの出力軸が嵌合するように位置決め部材24の上面に溝24aが形成される。
【0017】
ストッパ25は、側壁22の一端であってレバーハンドル23とは反対側の端部に設けられ、位置決め部材24に載置されたワークのスライドを規制する。
【0018】
揺動トレー30は、図1、図2における下方端において反転トレー20の反転軸11と平行に反転トレー20に軸支される揺動軸26に連結される。すなわち、揺動トレー30の揺動軸26は反転トレー20の反転に伴って揺動する。また、揺動トレー30は、ワークをシュートさせる一対のローラコンベア31と、ワークのシュート方向をガイドするシュートガイド32とを備える。
【0019】
一対のローラコンベア31は、揺動トレー30の面のうち反転トレー20側の面30aに並設され、ワークを上下反転した後に、揺動トレー30に支持されるワークを自重によってシュートさせる。シュートガイド32は、一対のローラコンベア31の外側にローラコンベア31と平行に設けられ、ワークのシュート方向以外の方向への移動を規制する。
【0020】
ガイド機構40は、基台10から上方へ向けて延設される延設部材41と、延設部材41に設けられる一対のガイドレール42と、揺動トレー30に突設される係合突起43とを備える。
【0021】
延設部材41は、一方の基台10に固定され、基台10から揺動トレー30の上方端部30bまでに亘って延設される。なお、反転軸11は延設部材41を貫通するように設けられているので、反転軸11は延設部材41に干渉することなく回転可能である。
【0022】
一対のガイドレール42は、延設部材41における揺動トレー30側の面に所定の間隔で並設される。所定の間隔は係合突起43がガイドレール42間で摺動可能な程度に設定される。また、ガイドレール42は揺動トレー30から反転トレー20側へと斜め下方に下降する第1の経路42aと、第1の経路42aの下端から折り返して反転トレー20の反転軸11を中心とするほぼ円周上を下降する第2の経路42bとから構成される。したがって、ガイドレール42は、図2に示すように上下方向中央42cで屈曲したくの字型に配置される。さらに、第2の経路42bの下端は反転軸11より垂直方向下方側に配置される。
【0023】
係合突起43は揺動トレー30の上方端部30bから延設部材41へ向けて凸形状に延設され、ガイドレール42に沿って摺動することで反転トレー20の反転時における揺動トレー30の動き、特に傾きを規定する。
【0024】
また、反転トレー20の反転軸11であって基台10より外側にはおもり12が設けられており、これにより反転トレー20には、常にレバーハンドル23によって加えられる力の向きとは反対方向の力が付与される。したがって、作業者がレバーハンドル23に触れていない場合には、反転トレー20及び揺動トレー30は図1〜図3に示す位置にあり、これを初期位置とする。
【0025】
次に、上記のように構成されるワーク反転装置100の動作について説明する。図4及び図5は、ワーク反転装置100の動作の過程を(a)から(e)へと順に示す側面図であり、(a)〜(c)は図4に示し、(d)及び(e)は図5に示す。
【0026】
図4(a)に示すように、作業者がワークを反転トレー20の載置面21に載置する。ワークは、ワークの下面の一部が載置面21に配置された位置決め部材24と嵌合するように載置される。
【0027】
作業者がレバーハンドル23を持ち上げると、図4(b)に示すように、反転トレー20が反転軸11を中心として回動する。これに伴って揺動トレー30の揺動軸26が反転トレー20とともに下方に移動するので、揺動トレー30の係合突起43がガイドレール42に沿って摺動しながら揺動トレー30全体が下方へと移動する。これにより、揺動トレー30と反転トレー20とのなす角は反転トレー20の反転に応じて徐々に減少し、揺動トレー30がワークに近接していく。
【0028】
反転トレー20がさらに回動し、図4(c)に示すようにほぼ直立状態となると、係合突起43はガイドレール42の第1の経路42aの下端42c(屈曲部)まで下降し、揺動トレー30もほぼ直立状態となる。これにより、ワークは反転トレー20と揺動トレー30とによって挟持される。なお、ワークは必ずしも反転トレー20と揺動トレー30とに同時に当接するように挟持される必要はなく、反転トレー20と揺動トレー30との間にワークが保持されていればよい。
【0029】
反転トレー20がさらに回動すると、図5(d)に示すように、反転トレー20と揺動トレー30とは一体的に回動し、ワークは主に揺動トレー30に保持された状態となる。ここで、揺動トレー30には自重により反転トレー20に設けられる揺動軸26を支点として回動する方向に力が作用するが、ガイドレール42の第2の経路42bは、反転トレー20の反転軸11を中心としたほぼ円周上に形成されるので、揺動トレー30が反転トレー20から離間することはなく、反転終了まで揺動トレー30と反転トレー20とが一体的に回動する。
【0030】
係合突起43がガイドレール42の第2の経路42bの下端まで到達すると、図5(e)に示すように、反転トレー20及び揺動トレー30の回動は規制される。第2の経路42bの下端は反転軸11より垂直方向下方側に配置されるので、反転トレー20及び揺動トレー30は水平より少しだけ傾斜した状態となる。すなわち、反転トレー20の端部21bであってレバーハンドル23側の端部21bが反転軸11より下方に位置する状態となる。これにより、ワークは揺動トレー30に設けられたローラコンベア31上を自重によって滑り落ち、ワーク反転装置100とは別に設けられる所定のシュート位置へとシュートされる。
【0031】
その後、作業者がレバーハンドル23から手を離すと、反転軸11に固定されたおもり12によって反転トレー20は逆回転し、揺動トレー30とともに上記過程に沿って初期位置まで戻る。
【0032】
図4及び図5からも明らかなように、以上の動作により、ワークは反転トレー20とともに水平状態から垂直状態となるまで傾転され、垂直状態となった時、反転トレー20から離間するとともに揺動トレー30に当接し、その後、揺動トレー30とともに垂直状態から水平状態となるまで傾転される。これらの動作により、ワークは180度回転して上下反転される。
【0033】
以上のように本実施形態では、反転トレー20の反転軸11は反転トレー20の幅方向のほぼ中央に配置されるので、反転トレー20の反転軸11に対する径方向の寸法を小さくすることができ、その分反転トレー20の反転時における回転半径が短縮されるので、反転に要するスペースを省スペース化することができる。また、ワークと反転軸11との距離を短縮することができるので、反転時におけるワークの垂直方向の重心移動量を抑制することができ、ワークを反転させるのに要する力を省力化することができる(請求項1に対応)。
【0034】
また、ワークは反転トレー20のほぼ中央に載置されるので、反転軸11がワークの重心を貫くように配置されることとなり、反転時に反転トレー20がほぼ自転することにより、反転トレー20の回転半径をさらに短縮することができる。これにより、反転に要するスペースをさらに小さくすることができるとともに、ワークの重心と反転軸11との距離が短縮されるので、ワークを反転させるのに要する力をさらに省力化することができる(請求項2に対応)。
【0035】
さらに、ガイドレール42は、反転トレー20が反転を開始してから直立状態となるまでの間、揺動トレー30が反転トレー20に対して開状態から閉状態となるまで徐々に揺動することで、揺動トレー30と反転トレー20とのなす角が徐々に減少して揺動トレー30がワークに近接対面するように揺動トレー30をガイドする第1の経路42aと、反転トレー20が直立状態となってから反転トレー20の反転が終了するまでの間、揺動トレー30と反転トレー20とが閉状態のままで一体的に反転するように揺動トレー30をガイドする第2の経路42bとから構成される。
【0036】
これにより、ワークを載置する際には載置面21の上方が開放されてワークを容易に載置することができるとともに、反転トレー20が直立状態となってワークが反転トレー20から離間するまでに揺動トレー30をワークに近接対面させることができる。よって、ワークの反転動作に際し、新たにワークを挟持する動作を必要とせず、単に反転トレー20を反転させる動作を行うだけで揺動トレー30を近接させてワークを支持させることができるので、ワークの反転動作を簡素化しながらワークを反転トレー20から落下させることなく、より確実に反転させることができる(請求項3に対応)。
【0037】
さらに、揺動トレー30はローラコンベア31を有し、第2の経路42bの下端は反転軸11より下方に配置されるので、反転トレー20を反転させた後、ワークが自重によってローラコンベア31上をシュートして搬出されるので、反転後に揺動トレー30からワークを取り除く動作を省略することができ、ワークの反転動作をさらに簡素化することができる(請求項4に対応)。
【0038】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例を示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。本発明の趣旨を逸脱しない範囲で種々の変更が可能である。
【0039】
例えば、上記実施形態では、反転トレー20を作業者が人力で反転させる構成としたが、アクチュエータなどによって反転トレー20を反転させる構成であってもよい。
【符号の説明】
【0040】
11 反転軸(反転軸線)
20 反転トレー(反転体)
21 載置面
26 揺動軸(支軸)
30 揺動トレー(揺動体)
31 ローラコンベア(コンベア)
40 ガイド機構
42 ガイド部
42a 第1の経路
42b 第2の経路
43 係合突起(突起部)
100 ワーク反転装置
【特許請求の範囲】
【請求項1】
ワークの上下を反転させるワーク反転装置であって、
前記ワークが載置されるとともに反転軸線を中心として反転可能であって、前記反転軸線が自身の幅方向の略中央部を貫く反転体と、
前記反転軸線に平行であって前記反転体上に設けられる支軸に連結され、前記反転体に対して揺動して前記ワークを挟持可能な揺動体と、
前記反転体の反転に伴って、前記揺動体を前記反転体に対して開状態から閉状態まで揺動させるガイド機構と、
を備えることを特徴とするワーク反転装置。
【請求項2】
前記ワークは前記反転体のほぼ中央に載置されている、ことを特徴とする請求項1に記載のワーク反転装置。
【請求項3】
前記ガイド機構は、前記揺動体から前記支軸の軸方向に突設される突起部と、前記支軸に垂直な面上に設けられ、前記突起部と摺接して前記揺動体の揺動をガイドするガイド部とから構成され、
前記ガイド部は、前記反転体が反転を開始してから直立状態となるまでの間に、前記揺動体が前記反転体に対して開状態から閉状態となるまで揺動するように前記揺動体をガイドする第1の経路と、前記反転体が直立状態となってから前記反転体の反転が終了するまでの間、前記揺動体が前記反転体に対して閉状態のままで前記反転体とともに反転するように前記揺動体をガイドする第2の経路とから構成される、
ことを特徴とする請求項1又は請求項2に記載のワーク反転装置。
【請求項4】
前記揺動体は、前記ワークと近接する面にコンベアを有し、
前記第2の経路の終端は前記反転軸線より下方に配置されることを特徴とする請求項1から請求項3までのいずれか一項に記載のワーク反転装置。
【請求項1】
ワークの上下を反転させるワーク反転装置であって、
前記ワークが載置されるとともに反転軸線を中心として反転可能であって、前記反転軸線が自身の幅方向の略中央部を貫く反転体と、
前記反転軸線に平行であって前記反転体上に設けられる支軸に連結され、前記反転体に対して揺動して前記ワークを挟持可能な揺動体と、
前記反転体の反転に伴って、前記揺動体を前記反転体に対して開状態から閉状態まで揺動させるガイド機構と、
を備えることを特徴とするワーク反転装置。
【請求項2】
前記ワークは前記反転体のほぼ中央に載置されている、ことを特徴とする請求項1に記載のワーク反転装置。
【請求項3】
前記ガイド機構は、前記揺動体から前記支軸の軸方向に突設される突起部と、前記支軸に垂直な面上に設けられ、前記突起部と摺接して前記揺動体の揺動をガイドするガイド部とから構成され、
前記ガイド部は、前記反転体が反転を開始してから直立状態となるまでの間に、前記揺動体が前記反転体に対して開状態から閉状態となるまで揺動するように前記揺動体をガイドする第1の経路と、前記反転体が直立状態となってから前記反転体の反転が終了するまでの間、前記揺動体が前記反転体に対して閉状態のままで前記反転体とともに反転するように前記揺動体をガイドする第2の経路とから構成される、
ことを特徴とする請求項1又は請求項2に記載のワーク反転装置。
【請求項4】
前記揺動体は、前記ワークと近接する面にコンベアを有し、
前記第2の経路の終端は前記反転軸線より下方に配置されることを特徴とする請求項1から請求項3までのいずれか一項に記載のワーク反転装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−91880(P2012−91880A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−238268(P2010−238268)
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月25日(2010.10.25)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]