
ワーク搬出入装置及び乾燥処理装置
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークの搬出入に用いるワーク搬出入装置と、このワーク搬出入装置を適用した乾燥処理装置に関する。
【背景技術】
【0002】
従来、各種の電子機器に使用されるリチウム電池には、円筒型リチウム二次電池がある(例えば、特許文献1参照)。この円筒型電池等のワークの製造工程には、ワークである電極材料をロール状に巻いた状態で乾燥処理を行う乾燥処理工程が含まれる場合がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−356047号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した乾燥処理工程では、容器内へのワークの搬入や、乾燥処理後の容器内からのワークの搬出をしなければならないが、作業者は、ワークを持ち上げたり、下ろしたり、という作業を人力だけで行う必要があった。
【0005】
本発明の目的は、ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供することである。
【課題を解決するための手段】
【0006】
第1の発明に係るワーク搬出入装置は、操作部と、操作部の移動に応じた駆動力を発生する駆動力発生装置とを備えたワーク搬出入装置であって、操作部は、ワークを保持し、その保持されたワークをスライド可能なアーム部材を有している。
【0007】
このワーク搬出入装置では、作業者が、ワークを保持した操作部を移動させると、駆動力発生装置によって操作部の移動に応じた駆動力が発生されるので、この駆動力によって、作業者が操作部を容易に移動させることができる。これにより、従来のように、人力だけで、ワークを持ち上げたり、下ろしたり、といった作業を行う必要がなく、アーム部材に保持されたワークをスライドさせるだけで、ワークの搬出入を行うことができる。従って、従来と比べて、ワークの搬出入を容易に行うことができる。
【0008】
なお、本発明の「搬出入」には、「搬送」の意味が含まれ、「搬入」のみを行う場合や、「搬出」のみを行う場合が含まれる。
【0009】
第2の発明に係るワーク搬出入装置は、第1の発明に係るワーク搬出入装置において、アーム部材の先端部は、ワークを収容可能な容器内に設けられた支持部材の一端部に接続可能である。
【0010】
このワーク搬出入装置では、ワークが保持されたアーム部材の先端部と、容器内に設けられた支持部材の一端部とを接続することで、ワークをアーム部材から支持部材に向けてスライドさせることができる。
【0011】
第3の発明に係るワーク搬出入装置は、第2の発明に係るワーク搬出入装置において、支持部材の一端部が、先端に近付くにつれて幅が狭くなる接続突起を有しており、アーム部材の先端部が、接続突起と同形状の接続溝を有している。
【0012】
このワーク搬出入装置では、アーム部材の接続溝を支持部材の接続突起に近づけていくことで、支持部材の一端部とアーム部材の先端部の軸を容易に合わせることができる。
【0013】
第4の発明に係るワーク搬出入装置は、第1〜第3の発明のいずれかに係るワーク搬出入装置において、ワークをアーム部材に対して固定する固定機構を備えている。
【0014】
このワーク搬出入装置では、アーム部材に対してワークを固定した状態で、アーム部材から支持部材に向けたワークの搬出入を実施できるので、ワークの位置ズレ等を防止でき、アーム部材から支持部材に向けたワークの搬出入の作業性を向上させることができる。
【0015】
第5の発明に係るワーク搬出入装置は、第1〜第4の発明のいずれかに係るワーク搬出入装置において、アーム部材は、その上面とワークの保持面とが当接した状態でワークを保持可能であって、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一形状に形成されている。
【0016】
このワーク搬出入装置では、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一形状に形成されているので、アーム部材の上面をワークがスライドする際にガタツクことがなく、アーム部材の上面に対してワークを安定した状態でスライドさせることができる。
【0017】
また、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一の曲率を有する場合は、ワークのアーム部材に対する平面内での回転を防止できる。従って、ワークの位置ズレ等を防止でき、ワークの搬出入の作業性をより向上させることができる。
【0018】
第6の発明に係るワーク搬出入装置は、第5の発明に係る乾燥処理装置において、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一形状に形成されている。
【0019】
このワーク搬出入装置では、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一形状に形成されているので、アーム部材の上面及び支持部材の上面をワークがスライドする際にガタツクことがなく、アーム部材の上面及び支持部材の上面に対してワークを安定した状態でスライドさせることができる。
【0020】
また、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一の曲率を有する場合には、ワークのアーム部材や支持部材に対する平面内での回転を防止できる。従って、ワークの位置ズレ等を防止でき、ワークの搬出入の作業性をより向上させることができる。
【0021】
第7の発明に係るワーク搬出入装置は、第2〜第6の発明のいずれかに係るワーク搬出入装置において、アーム部材に対してスライド可能に構成されたワーク取出機構を備えており、ワーク取出機構は、ワークを保持した状態でアーム部材に対してスライドすることによってワークを容器内から取り出す。
【0022】
このワーク搬出入装置では、ワークを保持した状態でアーム部材に対してスライドさせるだけでワークを容器内から取り出すことができるので、手作業でワークを引き出す等して容器内から取り出す場合と比べて、ワークの取り出し作業の作業性を向上させることができる。
【0023】
第8の発明に係るワーク搬出入装置は、第7の発明に係るワーク搬出入装置において、ワーク取出機構は、ワークを吸着することによってワークを保持する。
【0024】
このワーク搬出入装置では、ワークにワーク取出機構が吸着可能な面さえあれば、ワークを吸着することができる。従って、ワークの吸着に当たって複雑な機構は必要なく簡易な機構で、ワークを保持することができる。
【0025】
第9の発明に係るワーク搬出入装置は、第7の発明に係るワーク搬出入装置において、ワーク取出機構は、ワークの芯部分に設けられた溝に爪を引っ掛けることで、ワークを保持する。
【0026】
このワーク搬出入装置では、ワークの芯部分に設けられた溝に爪を引っ掛けるだけの簡易な機構で、ワークを保持することができる。
【0027】
第10の発明に係る乾燥処理装置は、第1〜第9の発明のいずれかに係るワーク搬出入装置と、アーム部材に接続される支持部材が設けられた乾燥処理用の容器とを備える。
【0028】
この乾燥処理装置では、第1〜第9の発明に係るワーク搬出入装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0029】
【図1】本実施形態に係る乾燥処理装置を示す斜視図である。
【図2】ワーク搬出入装置の操作部を示す斜視図である。
【図3】固定機構の動作を示す動作説明図である。
【図4】(a)密閉容器の前面側を示す斜視図である。(b)密閉容器の背面側を示す斜視図である。
【図5】(a)密閉容器の内部構造を示す水平断面視図である。(b)密閉容器の内部構造を示す側断面視図である。
【図6】(a)、(b)吸着機構の動作を示す斜視図である。(c)吸着機構の吸着本体の正面視図である。
【図7】ワークの搬出入工程を示すフローチャートである。
【図8】ワークの取り付け工程を示す側断面視図である。
【図9】アーム部材と支持部材との接続工程を示す側断面視図であって、(a)は接続前の状態を示し、(b)は接続後の状態を示している。
【図10】ワークの搬入工程を示す側断面視図である。
【図11】ワークの乾燥処理工程を示す側断面視図である。
【図12】ワークの搬出工程を示す側断面視図である。
【図13】ワークの搬出工程を示す側断面視図である。
【図14】(a)ワーク取出機構を示す斜視図である。(b)支持部材に支持されたワークの芯部分を示す斜視図である。
【図15】(a)、(b)ワーク取出機構の爪と芯部分の係合溝との係合手順を示す説明図である。
【図16】本発明の密閉容器の変形例を示した図である。
【発明を実施するための形態】
【0030】
以下、図面に基づいて、本発明の一実施形態に係るワーク搬出入装置及び乾燥処理装置について説明する。なお、図5、図8〜図10、図12及び図13では、説明の便宜上、密閉容器2の蓋部材16の図示を省略している。
【0031】
<乾燥処理装置>
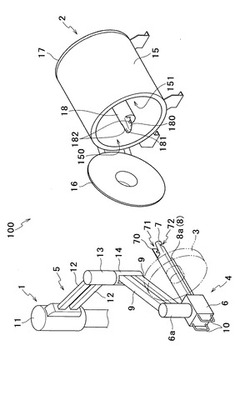
図1に示されるように、乾燥処理装置100は、図中に二点鎖線で示すワーク3に乾燥処理を施すものであって、ワーク3の搬出入を行うワーク搬出入装置1と、ワーク3が収容される密閉容器(容器)2とを有している。なお、本発明で用いられるワーク3は、例えばリチウムイオンバッテリー(LiB)の電極材であり、25kg程度の重量があり、ロール形状を有している。また、このワーク3の両面には、電極材が荷崩れすることを防止することを目的とした円盤状の保護ディスクD(図6(b)参照)が取り付けられている。
【0032】
<ワーク搬出入装置>
ワーク搬出入装置1は、ワーク3の密閉容器2の内部への搬出入を行うためのものであって、操作部4と、荷重バランサー装置(駆動力発生装置)5と、操作部4に着脱可能な別部品の吸着機構20(図6(a)参照)を有している。
【0033】
<駆動力発生装置>
図1に示されるように、荷重バランサー装置5は、操作部4の移動に応じた駆動力を発生する駆動源となるエアシリンダ(図示省略)が搭載された丸棒状の駆動本体11と、駆動本体11に対して回転可能に接続された2本の角材状の昇降アーム12と、各昇降アーム12を介して駆動本体11に接続された丸棒状の上連結部13と、上連結部13に対して回転可能に設けられた丸棒状の下連結部14と、下連結部14に対して回転可能に接続された2本の角材状の昇降アーム9と、各昇降アーム9を介して下連結部14に接続された丸棒状の軸部材6aとを有している。そして、軸部材6aの下端には、操作部4の後述する操作本体6が接続されており、この操作本体6は軸部材6aに対して回転可能に構成されている。
【0034】
上述したように、駆動本体11の内部には、エアシリンダが搭載されており、このエアシリンダからの駆動力によって、駆動本体11に対して2本の昇降アーム12が移動することで、上連結部13を移動させることができる。また、同様に、下連結部14の内部には図示しないエアシリンダが搭載されており、このエアシリンダからの駆動力によって、下連結部14に対して2本の昇降アーム9が移動することで、軸部材6aを移動させることができる。
【0035】
また、荷重バランサー装置5では、操作本体6に設けられたエアレギュレータによって、予めワーク3の荷重とバランスを取るように調圧された圧縮空気を先述の駆動本体11及び下連結部14の内部に搭載されたエアシリンダに供給することで、駆動本体11や下連結部14は、人手でもワーク3の持ち上げが簡単にできるように荷重をバランス・サポートする。
【0036】
<操作部>
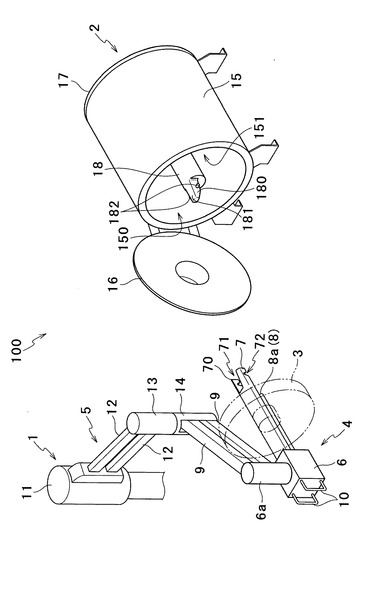
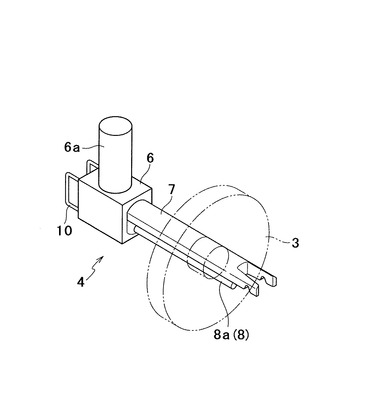
図1及び図2に示されるように、操作部4は、エアレギュレータ(図示省略)が搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。
【0037】
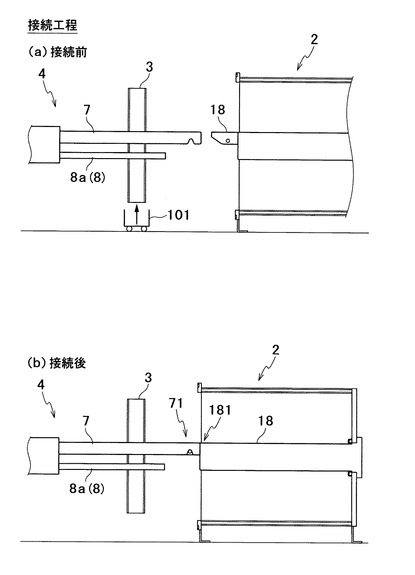
アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3(図2に示す二点鎖線)を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。アーム部材7の先端部70には、アーム部材7の軸方向に関して先端から離れるにつれて幅が狭くなる略V字状の接続溝71が形成されている。また、先端部70において、接続溝71の両脇には、後述する突出片182が挿入される略半円状の規制溝72が形成されている。そして、アーム部材7は、この接続溝71を介して、密閉容器2の支持部材18の一端部180に対して接続可能となっている。
【0038】
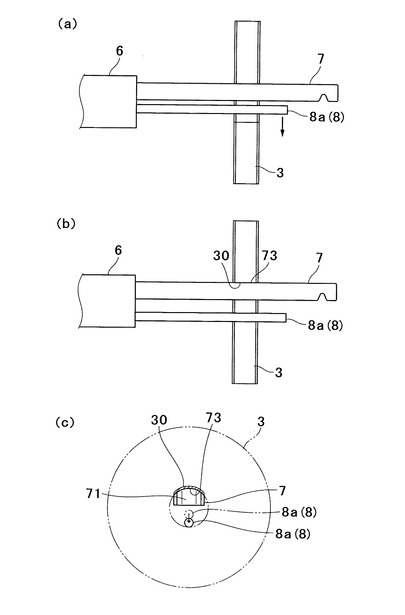
固定機構8は、操作本体6の前面側に設けられた長尺な棒状の固定部材8aと、操作本体6の内部に搭載され且つ固定部材8aの駆動源となるエアシリンダ(図示省略)とを有している。固定部材8aは、ワーク3の内周面に挿入されるとともに、エアシリンダの駆動力を受けてアーム部材7の軸方向と垂直な方向に昇降動する。図2や図3に示されるように、固定部材8aは、アーム部材7とともにワーク3の内周面に挿入された状態で、図3(c)中に二点鎖線で示す初期位置から下方向(図3(c)に示す矢印方向)に向けて移動することにより、その外周面でワーク3の内周面を押圧する。そして、この押圧によって、アーム部材7の上面73とワーク3の保持面30とが当接する。この結果、ワーク3がアーム部材7に対して固定される。なお、ワーク3の保持面30とは、図3(c)中にハッチングで示す部分であって、ワーク3の外周面のうち、アーム部材7の上面73が当接する面を示している。また、アーム部材7の上面73は、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有している。従って、図3(c)に示されるように、アーム部材7の軸方向から見たときに、アーム部材7の上面73とワーク3の保持面30とは、同一形状に形成されており、略隙間の無い状態で接触している。
【0039】
把持部材10は、作業者によって把持可能な部位であって、U字状に形成され、操作本体6の背面側に設けられている。
【0040】
<密閉容器>
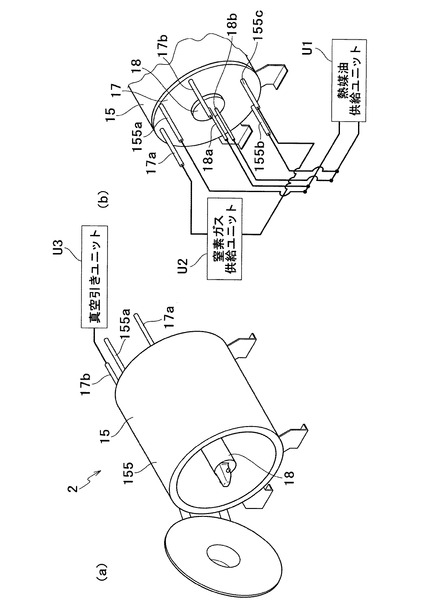
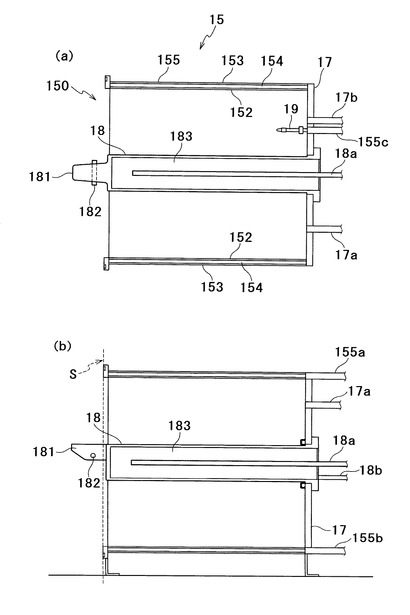
密閉容器2は、ワーク3の乾燥に適した雰囲気環境を形成するためのものである。より具体的には、密閉容器2内が、窒素ガスで充たされたり、真空状態で維持されたりする。図1に示されるように、密閉容器2は、ワーク3が収納される容器本体15と、容器本体15の両端部に設けられた蓋部材16及び閉塞部材17と、略円筒状に形成され且つ容器本体15の軸方向に延びる支持部材18とを有している。これにより、容器本体15の軸方向に関して前面側端部の開口150は、蓋部材16によって覆われるとともに、背面側端部の開口151は閉塞部材17により覆われている。
【0041】
図5(a)、(b)に示されるように、容器本体15は、径の異なる内管152と外管153とを組み合わせた二重構造を有している。そして、両管の間に形成された隙間を利用して、熱媒油を循環させるためのジャケット層154が設けられている。そして、図4(b)に示されるように、密閉容器2の閉塞部材17には、ジャケット層154の内部で熱媒油を循環させるための熱媒吸入管155a及び熱媒吐出管155bが設けられている。そして、図4(b)に示されるように、ジャケット層154の内部は、熱媒吸入管155a及び熱媒吐出管155bを介して、密閉容器2の外部に設けられた熱媒油供給ユニットU1に接続されている。これにより、ジャケット層154の内部と熱媒油供給ユニットU1との間で熱媒油を循環可能となっている。従って、ジャケット層154内に供給された熱媒油からの輻射熱によって、密閉容器2の内部に収容されたワーク3を効率良く加熱することができるようになっている。
【0042】
また、図4(b)に示されるように、密閉容器2の閉塞部材17には、密閉容器2の内部に高温の窒素ガスを吸入するための窒素ガス吸入管155cが設けられている。そして、窒素ガス吸入管155cの密閉容器2内の先端には、図5(a)に示されるように、窒素ガスを吹き出し可能なねじ込み継手式のノズル19が接続されている。また、閉塞部材17には、密閉容器2の内部から窒素ガスを吐出するための窒素ガス吐出管17aが設けられている。そして、図4(b)に示されるように、密閉容器2の内部は、窒素ガス吸入管155c及び窒素ガス吐出管17aを介して、密閉容器2の外部に設けられた窒素ガス供給ユニットU2に接続されている。これにより、密閉容器2の内部と窒素ガス供給ユニットU2との間で窒素ガスを循環可能となっている。従って、密閉容器2内で生じた窒素ガスの対流によって、窒素ガスの熱をワーク3に対して効率良く伝達することができるようになっている。
【0043】
蓋部材16は、密閉容器2の軸方向と垂直な方向に延びる水平軸S(図5(b)中の破線部分参照)を中心として左右方向に90°強の角度範囲で揺動可能な状態に支持されており、その揺動に応じて開閉可能となっている。従って、蓋部材16が開いた状態にある密閉容器2は、その内部に開口150を介してワーク3を収容可能となっている。つまり、開口150は、ワーク搬出入装置1と密閉容器2の間でワーク3の受け渡しを行う際の搬出入口としての役割を有している。一方、蓋部材16が閉じた状態にある密閉容器2では、容器本体15と蓋部材16及び閉塞部材17の内側と支持部材18の外周部の外側とに密閉空間が形成される。
【0044】
図4及び図5に示されるように、閉塞部材17には、密閉容器2の内部を真空状態で維持するための真空引き管17bが設けられている。そして、図4(a)に示されるように、密閉容器2の内部は、真空引き管17bを介して、密閉容器2の外部に設けられた真空引きユニットU3に接続されている。これにより、密閉容器2の内部が真空状態になるように変更可能であって、乾燥中のワーク3から発生した揮発分を真空引きによって密閉容器2の内部から抜き出すことができ、密閉容器2内に揮発分が発生することによる密閉容器2内の圧力上昇を抑制できるようになっている。
【0045】
図5に示されるように、支持部材18は、その内部に中空空間183が形成されている。そして、図4(b)に示されるように、支持部材18の背面には、中空空間183の内部で熱媒油を循環させるための熱媒吸入管18a及び熱媒吐出管18bが設けられている。そして、中空空間183の内部は、熱媒吸入管18a及び熱媒吐出管18bを介して、上述した熱媒油供給ユニットU1に接続されている。これにより、中空空間183の内部と、熱媒油供給ユニットU1との間で熱媒油を循環させることが可能である。従って、中空空間183の内部を循環する熱媒油からの熱伝達(熱輻射)によって支持部材18の外周部が加熱され、加熱された外周部からの熱伝導によって、支持部材18に支持されているワーク3を効率的に加熱することが可能となっている。なお、本実施形態では、コスト面を考慮して、上述したジャケット層154の内部を循環させる熱媒油と、中空空間183の内部を循環させる熱媒油は、同じものが使用されている。また、支持部材18は、高温加熱に適するものであれば、任意の材料を用いることができる。
【0046】
また、ワーク3が摺動自在に支持部材18に挿入される。支持部材18は、密閉容器2の内部に収容されたワーク3を保持するために設けられており、本実施形態では、支持部材18は、計6個のワーク3を保持可能に構成されている。また、支持部材18は、ワーク搬出入装置1との間でワーク3の受け渡しを行う際に、ワーク搬出入装置1のアーム部材7に接続される役割を有している。従って、図1に示されるように、支持部材18の一端部180には、アーム部材7の先端部70に形成された接続溝71と同じ略V字形状のテーパ状の接続突起181が形成されている。より具体的に、この接続突起181は、支持部材18の軸方向に関して一端部180に向かうにつれて幅が狭くなる先細り形状を有している。また、一端部180において、接続突起181の両側面には、支持部材18の軸方向と垂直な方向に突出する棒状の一対の突出片182が形成されている。
【0047】
また、支持部材18の上面は、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有している。つまり、本実施形態において、アーム部材7の軸方向から見たときに、支持部材18の上面は、アーム部材7の上面73と同一の曲率を有しており、同一形状に形成されている。
【0048】
<吸着機構>
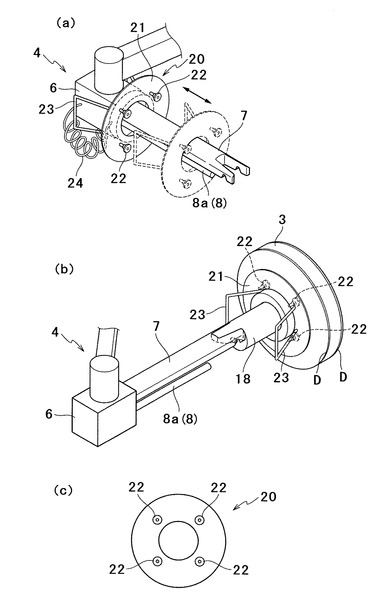
図6(a)の破線に示されるように、吸着機構(ワーク取出機構)20は、アーム部材7に保持された状態でアーム部材7に対してアーム部材7の軸方向(図中の矢印方向)にスライド可能に構成されている。吸着機構20は、ロール形状を有する吸着本体21と、吸着本体21の前面に設けられた4つの吸盤部22と、吸着本体21の背面に設けられ且つ作業者によって把持可能な一対の把持部材23と、操作部4と吸着本体21とを接続するとともに、伸縮自在な伸縮ホース24とを有している。
【0049】
吸着本体21は、その内周面にアーム部材7が挿入されるとともに、アーム部材7に保持された状態で、アーム部材7の軸方向に沿ってスライド可能に構成されている。また、この吸着本体21は、図6(b)に示されるように、アーム部材7に接続された支持部材18の軸方向に沿ってスライド可能であり、操作部4と密閉容器2内部との間を往復自在に移動することが可能となっている。また、本実施形態において、アーム部材7の上面73は、アーム部材7の軸方向から見たときに、吸着本体21の保持面と同一の曲率を有しており、同一形状に形成されている。同様に、支持部材18の上面と吸着本体21の保持面も同一の曲率を有している。
【0050】
4つの吸盤部22は、図6(c)に示されるように、吸着本体21の中心軸の回りに互いに90°離れた位置に配置されている。そして、吸盤部22は、ワーク3の保護ディスクDの前面に吸着可能であり、この吸着により、ワーク3を保持することが可能となっている。
【0051】
図6(a)に示されるように、螺旋状に巻回された伸縮ホース24は、吸着本体21の移動に応じて伸縮自在に構成されている。伸縮ホース24の一端部は、操作本体6の側壁部に形成された接続部(図示省略)に接続され、他端部は、吸着本体21の側面に取り付けられている。
【0052】
<ワークの搬出入手順>
次に、図7〜図13を参照しつつ、ワーク3の搬出入手順について説明する。
【0053】
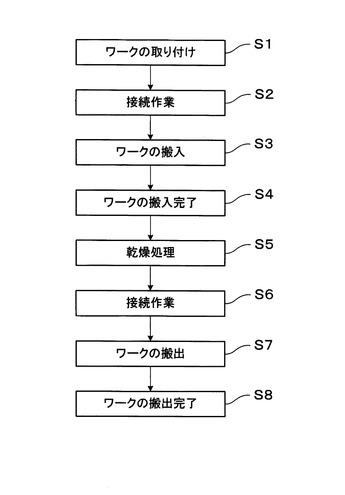
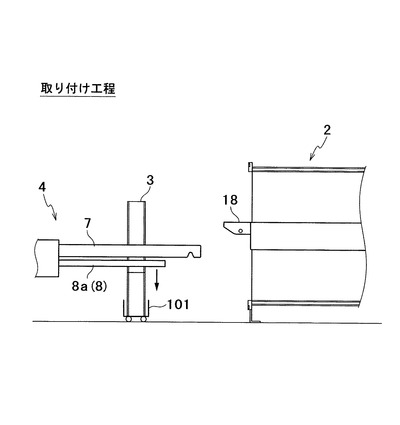
まず、図7のステップS1において、台車101からのワーク3の取り付け作業が行われる。より具体的には、図8に示されるように、台車101に予め載置されたワーク3の内周面にアーム部材7及び固定部材8aの一部が挿入される。そして、この状態で、固定部材8aを下方向(図中の矢印方向)に移動させることにより、ワーク3をアーム部材7に対して固定する。
【0054】
そして、ワーク3がアーム部材7に対して固定された後に、荷重バランサー装置5は、操作本体6の移動に従って、駆動本体11や下連結部14の内部に搭載されたエアシリンダを制御する。
【0055】
次いで、図7のステップS2において、アーム部材7と支持部材18との接続作業が行われる。より具体的に、この接続作業は、図9(a)に示されるように、アーム部材7の上面の位置が、支持部材18の上面の高さの位置よりも少し上になるまで、アーム部材7を上方向に移動させる。そして、アーム部材7と支持部材18との接続は、図9(b)に示されるように、アーム部材7の接続溝71を、支持部材18の接続突起181に接続することによって行われる。本実施形態において、アーム部材7の先端部70と支持部材18の一端部180とは、各軸の左右方向の中心が一致した状態で接続される。
【0056】
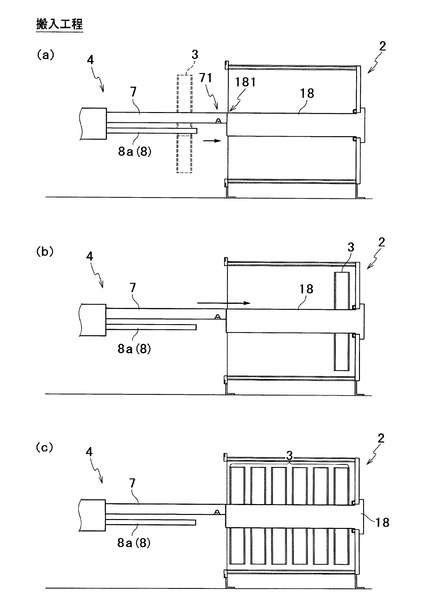
そして、接続が完了すれば、図7のステップS3において、ワーク3の搬入作業が行われる。より具体的に、この搬入作業は、図10(a)中の破線で示すワーク3をアーム部材7及び支持部材18の軸方向に沿って密閉容器2内部の奥側に向かう方向(図中の矢印方向)に所定の位置(図10(b)中の実線で示す位置)までスライドさせることによって行われる。そして、図7のステップS1〜S3の各作業が残り5回繰り返されることにより、計6個のワーク3が所定の間隔をおいて支持部材18に支持されることで、図7のステップS4において、全てのワーク3の密閉容器2の内部への搬入が完了する(図10(c)参照)。
【0057】
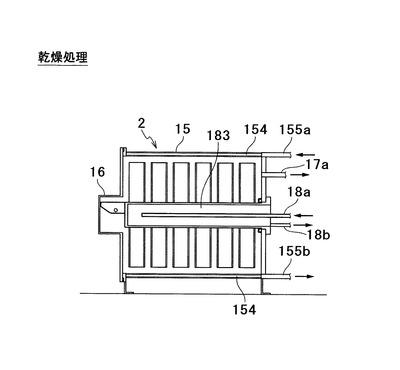
次いで、図7のステップS5では、各ワーク3の乾燥処理が施される。より具体的には、図11に示されるように、蓋部材16が閉じられた状態で、密閉容器2において、容器本体15と蓋部材16及び閉塞部材17の内側と支持部材18の外周部の外側とに密閉空間が形成される。この密閉状態で、容器本体15のジャケット層154の内部や、支持部材18の中空空間183の内部と、熱媒油供給ユニットU1との間で熱媒油を循環させたり、密閉容器2の内部と窒素ガス供給ユニットU2との間で、高温の窒素ガスを循環させたり、乾燥中のワーク3から発生した揮発分が真空引きユニットU3によって抜き出されたりすることによって、ジャケット層154内に供給された熱媒油からの輻射熱や、熱媒油により加熱された支持部材18の外周部からの熱伝導や、密閉容器2内に吸入された高温の窒素ガスの対流によって各ワーク3の真空乾燥処理が施される。
【0058】
そして、図7のステップS6において、ワーク3の搬出を行う前段階として、アーム部材7と支持部材18との接続作業が行われる。より具体的に、この接続作業は、上述したステップS2と同様に、蓋部材16を開けた状態で、アーム部材7を上方向に移動させると共に、アーム部材7の接続溝71を、支持部材18の接続突起181に接続することによって行われる。
【0059】
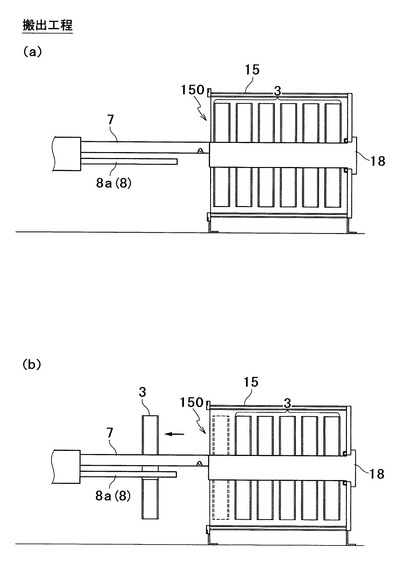
そして、接続が完了すれば、図7のステップS7において、ワーク3の搬出作業が行われる。より具体的に、この搬出作業は、支持部材18に支持された6つのワーク3のうち、容器本体15の開口150に近い側に支持された3つのワーク3は、開口150から作業者の手が届く範囲に配置されているので、手作業による搬出が行われる。より具体的に、図12(a)、(b)に示されるように、開口150に最も近いワーク3が支持部材18からアーム部材7に向かう方向(図中の矢印方向)にスライドされる。この後、支持部材18とアーム部材7との接続が解除され、アーム部材7に支持されたワーク3は、操作部4の操作に応じて、所定の格納場所まで運搬される。
【0060】
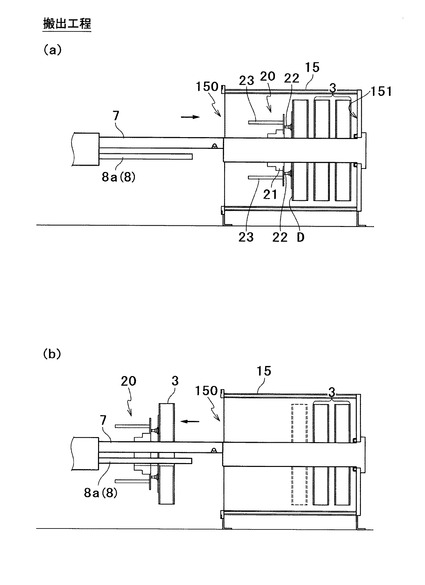
そして、手作業による搬出作業が、作業者の手が届く範囲内に配置された残り2つのワーク3についても繰り返された後、図13(a)、(b)に示されるように、容器本体15の開口151に近い側に支持された残り3つのワーク3、つまり、開口150から作業者の手が届かない範囲に配置された3つのワーク3について、吸着機構20を用いた搬出作業が行われる。より具体的に、この搬出作業では、作業者による把持部材23の操作に応じて、吸着本体21が、アーム部材7及び支持部材18の軸方向に沿って図13(a)に示す矢印方向に向けてスライドされ、ワーク3の保護ディスクDに吸盤部22が吸着される。そして、この吸着状態で、図13(b)に示されるように、吸着本体21を支持部材18からアーム部材7に向けて図13(b)に示す矢印方向に向けてスライドさせることによりワーク3が搬出される。そして、支持部材18とアーム部材7との接続が解除され、アーム部材7に支持されたワーク3は、操作部4の操作に応じて、所定の格納場所まで運搬される。そして、吸着機構20を用いた搬出作業が、残り2つのワーク3についても繰り返された後、全てのワーク3の搬出作業が完了する。
【0061】
[本実施形態のワーク搬出入装置1及び乾燥処理装置100の特徴]
以上、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、作業者が、アーム部材7にワーク3が保持された操作部4を移動させると、荷重バランサー装置5によって操作部4の移動に応じた駆動力が発生されるので、この駆動力によって、作業者が操作部4を容易に移動させることができる。これにより、従来のように、人力だけで、ワーク3を持ち上げたり、下ろしたり、といった作業を行う必要がなく、アーム部材7に保持されたワーク3をスライドさせるだけで、密閉容器2の内部へのワーク3の搬出入を行うことができる。従って、従来と比べて、ワーク3の搬出入を容易に行うことができる。
【0062】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3が保持されたアーム部材7の先端部70と、密閉容器2内に設けられた支持部材18の一端部180とを接続することで、ワーク3をアーム部材7から支持部材18に向けてスライドさせることができる。
【0063】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の先端部70は、その左右方向の軸中心が支持部材18の一端部180の軸中心と一致した状態で接続されるので、アーム部材7と支持部材18との芯ズレを防止でき、ワーク3の搬出入作業の作業性をより向上させることができる。
【0064】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の接続溝71を支持部材18の接続突起181に近づけていくことで、支持部材18の一端部180とアーム部材7の先端部70の軸を容易に合わせることができる。
【0065】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、接続溝71が接続突起181に接続されることで、接続溝71が障害となって接続突起181が接続溝71よりも外側に抜けることを規制できる。従って、支持部材18に接続されたアーム部材7の位置ズレを確実に防止できる。
【0066】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、固定機構8によりアーム部材7に対してワーク3を固定することができるので、ワーク3の位置ズレ等を防止でき、アーム部材7から支持部材18に向けたワーク3の搬出入の作業性を向上させることができる。
【0067】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一形状に形成されているので、アーム部材7の上面73をワーク3がスライドする際にガタツクことがなく、アーム部材7の上面に対してワーク3を安定した状態でスライドさせることができる。
【0068】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有しているので、ワーク3がアーム部材7に対して平面内で回転することを防止できる。従って、ワーク3の位置ズレ等を防止でき、ワーク3の密閉容器2に対する搬出入の作業性をより向上させることができる。
【0069】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、支持部材18の上面と同一形状に形成されているので、アーム部材7の上面73及び支持部材18の上面をワーク3がスライドする際にガタツクことがなく、アーム部材7の上面73及び支持部材18の上面に対してワーク3を安定した状態でスライドさせることができる。
【0070】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、支持部材18の上面と同一の曲率を有しているので、ワーク3がアーム部材7や支持部材18に対して平面内で回転することを防止できる。従って、ワーク3の位置ズレ等を防止でき、ワーク3の密閉容器2に対する搬出入の作業性をより向上させることができる。
【0071】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3を保持した状態でアーム部材7に対してスライドさせるだけでワーク3を密閉容器2内から取り出すことができるので、手作業でワークを引き出す等して密閉容器内から取り出す場合と比べて、ワークの取り出し作業の作業性を向上させることができる。
【0072】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3の保護ディスクDに吸着機構20の吸盤部22が吸着可能な吸着面さえあれば、ワーク3を吸着させた状態で密閉容器2内から取り出すことができる。従って、ワーク3の吸着に当たって複雑な機構は必要なく簡易な機構で、ワーク3の取り出し作業を実現することができる。
【0073】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の先端部70と支持部材18の一端部180とが接続された状態で、規制溝72によってアーム部材7が前後方向に抜けることを規制できるので、安定した接続状態を維持することができる。
【0074】
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、これらの実施形態に限定されるものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0075】
上述した実施形態では、ワーク3または吸着本体21の保持面の曲率と、アーム部材7及び支持部材18の上面の曲率とが同一である例について述べたが、各曲率が同一である必要はない。より具体的には、ワーク3や吸着本体21の挿入穴が円形状を有していなくてもよく、例えば矩形状を有していてもよい。また、アーム部材7及び支持部材18の径の大きさは同じであっても異なっていてもよい。
【0076】
上述した実施形態では、アーム部材7の先端部70に略V字状の接続溝71を形成すると共に、支持部材18の一端部180に接続溝71と同じ形状の接続突起181が形成され、アーム部材7の先端部70と支持部材18の一端部180とを接続する例について述べたが、本実施形態はこれに限定されず、支持部材18の一端部180に略V字状の接続溝を形成すると共に、アーム部材7の先端部70に、この接続溝と同じ略V字状の接続突起を形成することによって、アーム部材7の先端部70と支持部材18の一端部180とを接続してもよい。また、規制溝72と突出片182の態様も他の態様でもよい。また、支持部材18との接続時にアーム部材7が動かないように固定できれば、規制溝72と突出片182を設けなくてもよい。
【0077】
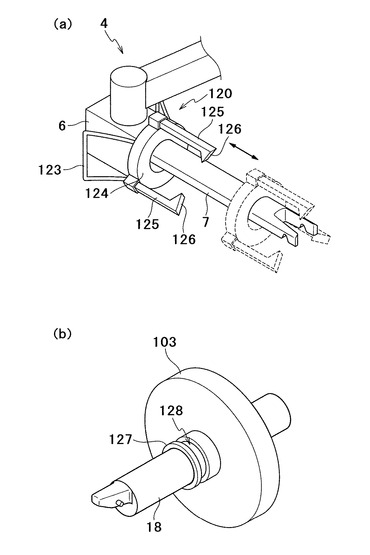
上述した実施形態では、吸着機構20を用いて、密閉容器2内のワーク3を搬出する例について述べたが、本実施形態はこれに限定されず、ワーク取出機構120を用いて、密閉容器2内のワーク3を搬出してもよい。図14(a)に示されるように、ワーク取出機構120は、作業者によって把持される操作部123を有し、アーム部材7及び支持部材18の各外周面をスライド可能に挿入される筒状の取り出し本体124と、取り出し本体124の外周部に形成され且つアーム部材7の軸方向に沿って突出する3つの突出部125と、突出部125の先端部に形成された3つの爪126とを有している。なお、図14(a)中の破線部分は、同図中に実線で示すワーク取出機構120が所定距離だけアーム部材7の軸方向にスライドした状態を示している。
【0078】
一方、図14(b)に示されるように、ワーク103は、その内周面に装着される筒状の芯部分127を有しており、この芯部分127は、アーム部材7及び支持部材18の各外周面をスライド自在に形成されている。芯部分127には、径方向内側に向けて凸状に窪んだ係合溝(溝)128が形成されている。なお、この係合溝128は、芯部分127の全周に亘って形成されている。この構成によれば、ワーク取出機構120の爪126をワーク103の係合溝128に係合させた状態で、作業者が操作部123を、アーム部材7及び支持部材18の軸方向に沿ってワーク3の搬出方向に向けて取り出すことによって、密閉容器2の内部からワーク103を容易に搬出することができる。また、この構成では、吸着機構20を用いる場合のように、必ずしもワーク3が保護ディスクDを有している必要はないので、汎用性が高い。なお、係合溝128は、芯部分127の全周に亘って形成されていなくてもよく、爪126と係合さえできればよい。
【0079】
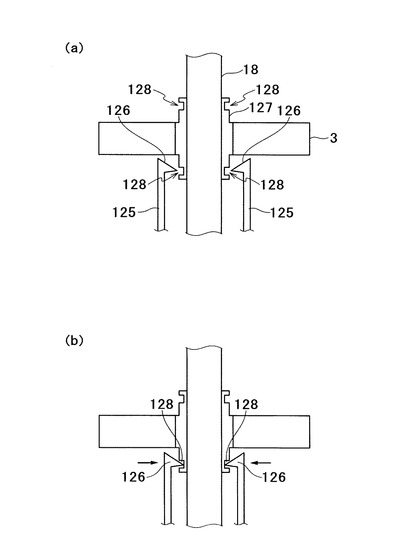
なお、図15は、爪126と係合溝128との係合手順を示している。まず、図15(a)に示されるように、爪126と係合溝128の位置合わせが行われる。次いで、図15(b)に示されるように、駆動機構により爪126が径方向内側に進行し、爪126の先端が係合溝128の奥面と当接することで、爪126と係合溝128との係合が完了する。また、吸着機構20やワーク取出機構120は、ワーク3の搬出時のみならず、搬入時に用いてもよく、搬入のみに用いてもよい。また、一部のワークの搬出や搬入だけでなく、全てのワークの搬入や搬出に用いてもよい。
【0080】
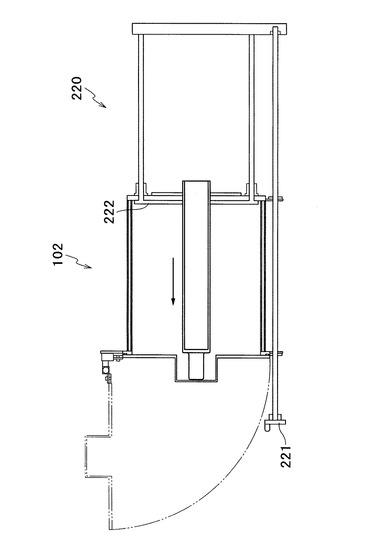
上述した実施形態では、密閉容器2に緊急避難用のエジェクタ機構が設けられていない例について述べたが、図16に示す密閉容器102のように、エジェクタ機構220を設けてもよい。このエジェクタ機構220は、作業者によって回動操作可能なハンドル部221と、作業者による回動操作を受けて、図中の矢印で示す搬出方向に向けてワークを強制的に押し出す押出板222とを有している。なお、ワークの押し出しは、手動操作に限らず、エアシリンダ等のアクチュエータを駆動源に使用してもよい。また、緊急避難用のエジェクタ機構は、押出板222に雌ネジ部(ナット部材)を形成し、先端部に雄ネジ部(ボルト部材)が形成された別部品のステッキ状のハンドル部材を用いて、このハンドル部材を押出板222に固定すると共に、このハンドル部材を図中の矢印で示す搬出方向に向けて引っ張ることで、ワークを強制的に取り出してもよい。
【0081】
上述した実施形態では、ワーク3を加熱するために、容器本体15のジャケット層154の内部や支持部材18の中空空間183に熱媒油を循環させる例について述べたが、本実施形態はこれに限定されない。ワークの種類や用途によっては、ワークを冷却するために、容器本体15のジャケット層154の内部や支持部材18の中空空間183に冷媒油を循環させもよい。
【0082】
上述した実施形態では、ワーク3として、リチウムイオンバッテリーの電極材を使用する例について述べたが、本発明はかかる実施形態に限定されず、リチウムイオンバッテリー以外の電極材、あるいは、全く種類の異なる様々な試料を搭載できる。また、上述した実施形態では、ワーク3がロール形状を有する例について述べたが、この形状に限らず、任意の形状に形成できる。
【0083】
上述した実施形態では、密閉容器2をワークの真空乾燥処理に適用する例について述べたが、本発明はかかる実施形態に限定されず、密閉容器2は処理材料の加圧熱処理や低温真空処理(フリーズドライ)や低温高圧処理等にも適用できる。
【0084】
上述した実施形態では、ワーク3の乾燥処理工程において、密閉容器2内に窒素を供給する例について述べたが、本発明はかかる実施形態に限定されるものではない。密閉容器の用途に応じて、密閉容器内に酸素を供給した場合には、密閉容器内に収容されたワークの熱酸化を促進させることができる。また例えば、密閉容器内を硫化ガスで充填した場合には、密閉容器内に収容されたワークの腐食試験を行うことができる。また、本発明は、ワークを乾燥するための容器に搬出入する場合に限らず、ワークを搬出入するものであれば、種々の用途に適用することができる。
【0085】
上述した実施形態では、荷重バランサー装置5の駆動源として、エアシリンダからなるアクチュエータを使用する例について述べたが、これ以外にも、例えば、油圧シリンダ等の流体アクチュエータや、電磁アクチュエータを使用できる。
【0086】
上述した実施形態では、ワーク3を1つずつ搬出入する例について述べたが、本発明はかかる実施形態に限定されず、ワークを複数まとめて搬出入してもよい。
【産業上の利用可能性】
【0087】
本発明を利用すれば、ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を得ることができる。
【符号の説明】
【0088】
1 ワーク搬出入装置
2、102 密閉容器(容器)
3、103 ワーク
4 操作部
5 荷重バランサー装置(駆動力発生装置)
7 アーム部材
8 固定機構
18 支持部材
20 吸着機構(ワーク取出機構)
30 保持面
70 先端部
71 接続溝
100 乾燥処理装置
120 ワーク取出機構
126 爪
127 芯部分
128 係合溝(溝)
180 一端部
181 接続突起
【技術分野】
【0001】
本発明は、ワークの搬出入に用いるワーク搬出入装置と、このワーク搬出入装置を適用した乾燥処理装置に関する。
【背景技術】
【0002】
従来、各種の電子機器に使用されるリチウム電池には、円筒型リチウム二次電池がある(例えば、特許文献1参照)。この円筒型電池等のワークの製造工程には、ワークである電極材料をロール状に巻いた状態で乾燥処理を行う乾燥処理工程が含まれる場合がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−356047号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した乾燥処理工程では、容器内へのワークの搬入や、乾燥処理後の容器内からのワークの搬出をしなければならないが、作業者は、ワークを持ち上げたり、下ろしたり、という作業を人力だけで行う必要があった。
【0005】
本発明の目的は、ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供することである。
【課題を解決するための手段】
【0006】
第1の発明に係るワーク搬出入装置は、操作部と、操作部の移動に応じた駆動力を発生する駆動力発生装置とを備えたワーク搬出入装置であって、操作部は、ワークを保持し、その保持されたワークをスライド可能なアーム部材を有している。
【0007】
このワーク搬出入装置では、作業者が、ワークを保持した操作部を移動させると、駆動力発生装置によって操作部の移動に応じた駆動力が発生されるので、この駆動力によって、作業者が操作部を容易に移動させることができる。これにより、従来のように、人力だけで、ワークを持ち上げたり、下ろしたり、といった作業を行う必要がなく、アーム部材に保持されたワークをスライドさせるだけで、ワークの搬出入を行うことができる。従って、従来と比べて、ワークの搬出入を容易に行うことができる。
【0008】
なお、本発明の「搬出入」には、「搬送」の意味が含まれ、「搬入」のみを行う場合や、「搬出」のみを行う場合が含まれる。
【0009】
第2の発明に係るワーク搬出入装置は、第1の発明に係るワーク搬出入装置において、アーム部材の先端部は、ワークを収容可能な容器内に設けられた支持部材の一端部に接続可能である。
【0010】
このワーク搬出入装置では、ワークが保持されたアーム部材の先端部と、容器内に設けられた支持部材の一端部とを接続することで、ワークをアーム部材から支持部材に向けてスライドさせることができる。
【0011】
第3の発明に係るワーク搬出入装置は、第2の発明に係るワーク搬出入装置において、支持部材の一端部が、先端に近付くにつれて幅が狭くなる接続突起を有しており、アーム部材の先端部が、接続突起と同形状の接続溝を有している。
【0012】
このワーク搬出入装置では、アーム部材の接続溝を支持部材の接続突起に近づけていくことで、支持部材の一端部とアーム部材の先端部の軸を容易に合わせることができる。
【0013】
第4の発明に係るワーク搬出入装置は、第1〜第3の発明のいずれかに係るワーク搬出入装置において、ワークをアーム部材に対して固定する固定機構を備えている。
【0014】
このワーク搬出入装置では、アーム部材に対してワークを固定した状態で、アーム部材から支持部材に向けたワークの搬出入を実施できるので、ワークの位置ズレ等を防止でき、アーム部材から支持部材に向けたワークの搬出入の作業性を向上させることができる。
【0015】
第5の発明に係るワーク搬出入装置は、第1〜第4の発明のいずれかに係るワーク搬出入装置において、アーム部材は、その上面とワークの保持面とが当接した状態でワークを保持可能であって、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一形状に形成されている。
【0016】
このワーク搬出入装置では、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一形状に形成されているので、アーム部材の上面をワークがスライドする際にガタツクことがなく、アーム部材の上面に対してワークを安定した状態でスライドさせることができる。
【0017】
また、アーム部材の上面が、アーム部材の軸方向から見たときに、ワークの保持面と同一の曲率を有する場合は、ワークのアーム部材に対する平面内での回転を防止できる。従って、ワークの位置ズレ等を防止でき、ワークの搬出入の作業性をより向上させることができる。
【0018】
第6の発明に係るワーク搬出入装置は、第5の発明に係る乾燥処理装置において、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一形状に形成されている。
【0019】
このワーク搬出入装置では、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一形状に形成されているので、アーム部材の上面及び支持部材の上面をワークがスライドする際にガタツクことがなく、アーム部材の上面及び支持部材の上面に対してワークを安定した状態でスライドさせることができる。
【0020】
また、アーム部材の上面が、アーム部材の軸方向から見たときに、支持部材の上面と同一の曲率を有する場合には、ワークのアーム部材や支持部材に対する平面内での回転を防止できる。従って、ワークの位置ズレ等を防止でき、ワークの搬出入の作業性をより向上させることができる。
【0021】
第7の発明に係るワーク搬出入装置は、第2〜第6の発明のいずれかに係るワーク搬出入装置において、アーム部材に対してスライド可能に構成されたワーク取出機構を備えており、ワーク取出機構は、ワークを保持した状態でアーム部材に対してスライドすることによってワークを容器内から取り出す。
【0022】
このワーク搬出入装置では、ワークを保持した状態でアーム部材に対してスライドさせるだけでワークを容器内から取り出すことができるので、手作業でワークを引き出す等して容器内から取り出す場合と比べて、ワークの取り出し作業の作業性を向上させることができる。
【0023】
第8の発明に係るワーク搬出入装置は、第7の発明に係るワーク搬出入装置において、ワーク取出機構は、ワークを吸着することによってワークを保持する。
【0024】
このワーク搬出入装置では、ワークにワーク取出機構が吸着可能な面さえあれば、ワークを吸着することができる。従って、ワークの吸着に当たって複雑な機構は必要なく簡易な機構で、ワークを保持することができる。
【0025】
第9の発明に係るワーク搬出入装置は、第7の発明に係るワーク搬出入装置において、ワーク取出機構は、ワークの芯部分に設けられた溝に爪を引っ掛けることで、ワークを保持する。
【0026】
このワーク搬出入装置では、ワークの芯部分に設けられた溝に爪を引っ掛けるだけの簡易な機構で、ワークを保持することができる。
【0027】
第10の発明に係る乾燥処理装置は、第1〜第9の発明のいずれかに係るワーク搬出入装置と、アーム部材に接続される支持部材が設けられた乾燥処理用の容器とを備える。
【0028】
この乾燥処理装置では、第1〜第9の発明に係るワーク搬出入装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0029】
【図1】本実施形態に係る乾燥処理装置を示す斜視図である。
【図2】ワーク搬出入装置の操作部を示す斜視図である。
【図3】固定機構の動作を示す動作説明図である。
【図4】(a)密閉容器の前面側を示す斜視図である。(b)密閉容器の背面側を示す斜視図である。
【図5】(a)密閉容器の内部構造を示す水平断面視図である。(b)密閉容器の内部構造を示す側断面視図である。
【図6】(a)、(b)吸着機構の動作を示す斜視図である。(c)吸着機構の吸着本体の正面視図である。
【図7】ワークの搬出入工程を示すフローチャートである。
【図8】ワークの取り付け工程を示す側断面視図である。
【図9】アーム部材と支持部材との接続工程を示す側断面視図であって、(a)は接続前の状態を示し、(b)は接続後の状態を示している。
【図10】ワークの搬入工程を示す側断面視図である。
【図11】ワークの乾燥処理工程を示す側断面視図である。
【図12】ワークの搬出工程を示す側断面視図である。
【図13】ワークの搬出工程を示す側断面視図である。
【図14】(a)ワーク取出機構を示す斜視図である。(b)支持部材に支持されたワークの芯部分を示す斜視図である。
【図15】(a)、(b)ワーク取出機構の爪と芯部分の係合溝との係合手順を示す説明図である。
【図16】本発明の密閉容器の変形例を示した図である。
【発明を実施するための形態】
【0030】
以下、図面に基づいて、本発明の一実施形態に係るワーク搬出入装置及び乾燥処理装置について説明する。なお、図5、図8〜図10、図12及び図13では、説明の便宜上、密閉容器2の蓋部材16の図示を省略している。
【0031】
<乾燥処理装置>
図1に示されるように、乾燥処理装置100は、図中に二点鎖線で示すワーク3に乾燥処理を施すものであって、ワーク3の搬出入を行うワーク搬出入装置1と、ワーク3が収容される密閉容器(容器)2とを有している。なお、本発明で用いられるワーク3は、例えばリチウムイオンバッテリー(LiB)の電極材であり、25kg程度の重量があり、ロール形状を有している。また、このワーク3の両面には、電極材が荷崩れすることを防止することを目的とした円盤状の保護ディスクD(図6(b)参照)が取り付けられている。
【0032】
<ワーク搬出入装置>
ワーク搬出入装置1は、ワーク3の密閉容器2の内部への搬出入を行うためのものであって、操作部4と、荷重バランサー装置(駆動力発生装置)5と、操作部4に着脱可能な別部品の吸着機構20(図6(a)参照)を有している。
【0033】
<駆動力発生装置>
図1に示されるように、荷重バランサー装置5は、操作部4の移動に応じた駆動力を発生する駆動源となるエアシリンダ(図示省略)が搭載された丸棒状の駆動本体11と、駆動本体11に対して回転可能に接続された2本の角材状の昇降アーム12と、各昇降アーム12を介して駆動本体11に接続された丸棒状の上連結部13と、上連結部13に対して回転可能に設けられた丸棒状の下連結部14と、下連結部14に対して回転可能に接続された2本の角材状の昇降アーム9と、各昇降アーム9を介して下連結部14に接続された丸棒状の軸部材6aとを有している。そして、軸部材6aの下端には、操作部4の後述する操作本体6が接続されており、この操作本体6は軸部材6aに対して回転可能に構成されている。
【0034】
上述したように、駆動本体11の内部には、エアシリンダが搭載されており、このエアシリンダからの駆動力によって、駆動本体11に対して2本の昇降アーム12が移動することで、上連結部13を移動させることができる。また、同様に、下連結部14の内部には図示しないエアシリンダが搭載されており、このエアシリンダからの駆動力によって、下連結部14に対して2本の昇降アーム9が移動することで、軸部材6aを移動させることができる。
【0035】
また、荷重バランサー装置5では、操作本体6に設けられたエアレギュレータによって、予めワーク3の荷重とバランスを取るように調圧された圧縮空気を先述の駆動本体11及び下連結部14の内部に搭載されたエアシリンダに供給することで、駆動本体11や下連結部14は、人手でもワーク3の持ち上げが簡単にできるように荷重をバランス・サポートする。
【0036】
<操作部>
図1及び図2に示されるように、操作部4は、エアレギュレータ(図示省略)が搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。
【0037】
アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3(図2に示す二点鎖線)を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。アーム部材7の先端部70には、アーム部材7の軸方向に関して先端から離れるにつれて幅が狭くなる略V字状の接続溝71が形成されている。また、先端部70において、接続溝71の両脇には、後述する突出片182が挿入される略半円状の規制溝72が形成されている。そして、アーム部材7は、この接続溝71を介して、密閉容器2の支持部材18の一端部180に対して接続可能となっている。
【0038】
固定機構8は、操作本体6の前面側に設けられた長尺な棒状の固定部材8aと、操作本体6の内部に搭載され且つ固定部材8aの駆動源となるエアシリンダ(図示省略)とを有している。固定部材8aは、ワーク3の内周面に挿入されるとともに、エアシリンダの駆動力を受けてアーム部材7の軸方向と垂直な方向に昇降動する。図2や図3に示されるように、固定部材8aは、アーム部材7とともにワーク3の内周面に挿入された状態で、図3(c)中に二点鎖線で示す初期位置から下方向(図3(c)に示す矢印方向)に向けて移動することにより、その外周面でワーク3の内周面を押圧する。そして、この押圧によって、アーム部材7の上面73とワーク3の保持面30とが当接する。この結果、ワーク3がアーム部材7に対して固定される。なお、ワーク3の保持面30とは、図3(c)中にハッチングで示す部分であって、ワーク3の外周面のうち、アーム部材7の上面73が当接する面を示している。また、アーム部材7の上面73は、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有している。従って、図3(c)に示されるように、アーム部材7の軸方向から見たときに、アーム部材7の上面73とワーク3の保持面30とは、同一形状に形成されており、略隙間の無い状態で接触している。
【0039】
把持部材10は、作業者によって把持可能な部位であって、U字状に形成され、操作本体6の背面側に設けられている。
【0040】
<密閉容器>
密閉容器2は、ワーク3の乾燥に適した雰囲気環境を形成するためのものである。より具体的には、密閉容器2内が、窒素ガスで充たされたり、真空状態で維持されたりする。図1に示されるように、密閉容器2は、ワーク3が収納される容器本体15と、容器本体15の両端部に設けられた蓋部材16及び閉塞部材17と、略円筒状に形成され且つ容器本体15の軸方向に延びる支持部材18とを有している。これにより、容器本体15の軸方向に関して前面側端部の開口150は、蓋部材16によって覆われるとともに、背面側端部の開口151は閉塞部材17により覆われている。
【0041】
図5(a)、(b)に示されるように、容器本体15は、径の異なる内管152と外管153とを組み合わせた二重構造を有している。そして、両管の間に形成された隙間を利用して、熱媒油を循環させるためのジャケット層154が設けられている。そして、図4(b)に示されるように、密閉容器2の閉塞部材17には、ジャケット層154の内部で熱媒油を循環させるための熱媒吸入管155a及び熱媒吐出管155bが設けられている。そして、図4(b)に示されるように、ジャケット層154の内部は、熱媒吸入管155a及び熱媒吐出管155bを介して、密閉容器2の外部に設けられた熱媒油供給ユニットU1に接続されている。これにより、ジャケット層154の内部と熱媒油供給ユニットU1との間で熱媒油を循環可能となっている。従って、ジャケット層154内に供給された熱媒油からの輻射熱によって、密閉容器2の内部に収容されたワーク3を効率良く加熱することができるようになっている。
【0042】
また、図4(b)に示されるように、密閉容器2の閉塞部材17には、密閉容器2の内部に高温の窒素ガスを吸入するための窒素ガス吸入管155cが設けられている。そして、窒素ガス吸入管155cの密閉容器2内の先端には、図5(a)に示されるように、窒素ガスを吹き出し可能なねじ込み継手式のノズル19が接続されている。また、閉塞部材17には、密閉容器2の内部から窒素ガスを吐出するための窒素ガス吐出管17aが設けられている。そして、図4(b)に示されるように、密閉容器2の内部は、窒素ガス吸入管155c及び窒素ガス吐出管17aを介して、密閉容器2の外部に設けられた窒素ガス供給ユニットU2に接続されている。これにより、密閉容器2の内部と窒素ガス供給ユニットU2との間で窒素ガスを循環可能となっている。従って、密閉容器2内で生じた窒素ガスの対流によって、窒素ガスの熱をワーク3に対して効率良く伝達することができるようになっている。
【0043】
蓋部材16は、密閉容器2の軸方向と垂直な方向に延びる水平軸S(図5(b)中の破線部分参照)を中心として左右方向に90°強の角度範囲で揺動可能な状態に支持されており、その揺動に応じて開閉可能となっている。従って、蓋部材16が開いた状態にある密閉容器2は、その内部に開口150を介してワーク3を収容可能となっている。つまり、開口150は、ワーク搬出入装置1と密閉容器2の間でワーク3の受け渡しを行う際の搬出入口としての役割を有している。一方、蓋部材16が閉じた状態にある密閉容器2では、容器本体15と蓋部材16及び閉塞部材17の内側と支持部材18の外周部の外側とに密閉空間が形成される。
【0044】
図4及び図5に示されるように、閉塞部材17には、密閉容器2の内部を真空状態で維持するための真空引き管17bが設けられている。そして、図4(a)に示されるように、密閉容器2の内部は、真空引き管17bを介して、密閉容器2の外部に設けられた真空引きユニットU3に接続されている。これにより、密閉容器2の内部が真空状態になるように変更可能であって、乾燥中のワーク3から発生した揮発分を真空引きによって密閉容器2の内部から抜き出すことができ、密閉容器2内に揮発分が発生することによる密閉容器2内の圧力上昇を抑制できるようになっている。
【0045】
図5に示されるように、支持部材18は、その内部に中空空間183が形成されている。そして、図4(b)に示されるように、支持部材18の背面には、中空空間183の内部で熱媒油を循環させるための熱媒吸入管18a及び熱媒吐出管18bが設けられている。そして、中空空間183の内部は、熱媒吸入管18a及び熱媒吐出管18bを介して、上述した熱媒油供給ユニットU1に接続されている。これにより、中空空間183の内部と、熱媒油供給ユニットU1との間で熱媒油を循環させることが可能である。従って、中空空間183の内部を循環する熱媒油からの熱伝達(熱輻射)によって支持部材18の外周部が加熱され、加熱された外周部からの熱伝導によって、支持部材18に支持されているワーク3を効率的に加熱することが可能となっている。なお、本実施形態では、コスト面を考慮して、上述したジャケット層154の内部を循環させる熱媒油と、中空空間183の内部を循環させる熱媒油は、同じものが使用されている。また、支持部材18は、高温加熱に適するものであれば、任意の材料を用いることができる。
【0046】
また、ワーク3が摺動自在に支持部材18に挿入される。支持部材18は、密閉容器2の内部に収容されたワーク3を保持するために設けられており、本実施形態では、支持部材18は、計6個のワーク3を保持可能に構成されている。また、支持部材18は、ワーク搬出入装置1との間でワーク3の受け渡しを行う際に、ワーク搬出入装置1のアーム部材7に接続される役割を有している。従って、図1に示されるように、支持部材18の一端部180には、アーム部材7の先端部70に形成された接続溝71と同じ略V字形状のテーパ状の接続突起181が形成されている。より具体的に、この接続突起181は、支持部材18の軸方向に関して一端部180に向かうにつれて幅が狭くなる先細り形状を有している。また、一端部180において、接続突起181の両側面には、支持部材18の軸方向と垂直な方向に突出する棒状の一対の突出片182が形成されている。
【0047】
また、支持部材18の上面は、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有している。つまり、本実施形態において、アーム部材7の軸方向から見たときに、支持部材18の上面は、アーム部材7の上面73と同一の曲率を有しており、同一形状に形成されている。
【0048】
<吸着機構>
図6(a)の破線に示されるように、吸着機構(ワーク取出機構)20は、アーム部材7に保持された状態でアーム部材7に対してアーム部材7の軸方向(図中の矢印方向)にスライド可能に構成されている。吸着機構20は、ロール形状を有する吸着本体21と、吸着本体21の前面に設けられた4つの吸盤部22と、吸着本体21の背面に設けられ且つ作業者によって把持可能な一対の把持部材23と、操作部4と吸着本体21とを接続するとともに、伸縮自在な伸縮ホース24とを有している。
【0049】
吸着本体21は、その内周面にアーム部材7が挿入されるとともに、アーム部材7に保持された状態で、アーム部材7の軸方向に沿ってスライド可能に構成されている。また、この吸着本体21は、図6(b)に示されるように、アーム部材7に接続された支持部材18の軸方向に沿ってスライド可能であり、操作部4と密閉容器2内部との間を往復自在に移動することが可能となっている。また、本実施形態において、アーム部材7の上面73は、アーム部材7の軸方向から見たときに、吸着本体21の保持面と同一の曲率を有しており、同一形状に形成されている。同様に、支持部材18の上面と吸着本体21の保持面も同一の曲率を有している。
【0050】
4つの吸盤部22は、図6(c)に示されるように、吸着本体21の中心軸の回りに互いに90°離れた位置に配置されている。そして、吸盤部22は、ワーク3の保護ディスクDの前面に吸着可能であり、この吸着により、ワーク3を保持することが可能となっている。
【0051】
図6(a)に示されるように、螺旋状に巻回された伸縮ホース24は、吸着本体21の移動に応じて伸縮自在に構成されている。伸縮ホース24の一端部は、操作本体6の側壁部に形成された接続部(図示省略)に接続され、他端部は、吸着本体21の側面に取り付けられている。
【0052】
<ワークの搬出入手順>
次に、図7〜図13を参照しつつ、ワーク3の搬出入手順について説明する。
【0053】
まず、図7のステップS1において、台車101からのワーク3の取り付け作業が行われる。より具体的には、図8に示されるように、台車101に予め載置されたワーク3の内周面にアーム部材7及び固定部材8aの一部が挿入される。そして、この状態で、固定部材8aを下方向(図中の矢印方向)に移動させることにより、ワーク3をアーム部材7に対して固定する。
【0054】
そして、ワーク3がアーム部材7に対して固定された後に、荷重バランサー装置5は、操作本体6の移動に従って、駆動本体11や下連結部14の内部に搭載されたエアシリンダを制御する。
【0055】
次いで、図7のステップS2において、アーム部材7と支持部材18との接続作業が行われる。より具体的に、この接続作業は、図9(a)に示されるように、アーム部材7の上面の位置が、支持部材18の上面の高さの位置よりも少し上になるまで、アーム部材7を上方向に移動させる。そして、アーム部材7と支持部材18との接続は、図9(b)に示されるように、アーム部材7の接続溝71を、支持部材18の接続突起181に接続することによって行われる。本実施形態において、アーム部材7の先端部70と支持部材18の一端部180とは、各軸の左右方向の中心が一致した状態で接続される。
【0056】
そして、接続が完了すれば、図7のステップS3において、ワーク3の搬入作業が行われる。より具体的に、この搬入作業は、図10(a)中の破線で示すワーク3をアーム部材7及び支持部材18の軸方向に沿って密閉容器2内部の奥側に向かう方向(図中の矢印方向)に所定の位置(図10(b)中の実線で示す位置)までスライドさせることによって行われる。そして、図7のステップS1〜S3の各作業が残り5回繰り返されることにより、計6個のワーク3が所定の間隔をおいて支持部材18に支持されることで、図7のステップS4において、全てのワーク3の密閉容器2の内部への搬入が完了する(図10(c)参照)。
【0057】
次いで、図7のステップS5では、各ワーク3の乾燥処理が施される。より具体的には、図11に示されるように、蓋部材16が閉じられた状態で、密閉容器2において、容器本体15と蓋部材16及び閉塞部材17の内側と支持部材18の外周部の外側とに密閉空間が形成される。この密閉状態で、容器本体15のジャケット層154の内部や、支持部材18の中空空間183の内部と、熱媒油供給ユニットU1との間で熱媒油を循環させたり、密閉容器2の内部と窒素ガス供給ユニットU2との間で、高温の窒素ガスを循環させたり、乾燥中のワーク3から発生した揮発分が真空引きユニットU3によって抜き出されたりすることによって、ジャケット層154内に供給された熱媒油からの輻射熱や、熱媒油により加熱された支持部材18の外周部からの熱伝導や、密閉容器2内に吸入された高温の窒素ガスの対流によって各ワーク3の真空乾燥処理が施される。
【0058】
そして、図7のステップS6において、ワーク3の搬出を行う前段階として、アーム部材7と支持部材18との接続作業が行われる。より具体的に、この接続作業は、上述したステップS2と同様に、蓋部材16を開けた状態で、アーム部材7を上方向に移動させると共に、アーム部材7の接続溝71を、支持部材18の接続突起181に接続することによって行われる。
【0059】
そして、接続が完了すれば、図7のステップS7において、ワーク3の搬出作業が行われる。より具体的に、この搬出作業は、支持部材18に支持された6つのワーク3のうち、容器本体15の開口150に近い側に支持された3つのワーク3は、開口150から作業者の手が届く範囲に配置されているので、手作業による搬出が行われる。より具体的に、図12(a)、(b)に示されるように、開口150に最も近いワーク3が支持部材18からアーム部材7に向かう方向(図中の矢印方向)にスライドされる。この後、支持部材18とアーム部材7との接続が解除され、アーム部材7に支持されたワーク3は、操作部4の操作に応じて、所定の格納場所まで運搬される。
【0060】
そして、手作業による搬出作業が、作業者の手が届く範囲内に配置された残り2つのワーク3についても繰り返された後、図13(a)、(b)に示されるように、容器本体15の開口151に近い側に支持された残り3つのワーク3、つまり、開口150から作業者の手が届かない範囲に配置された3つのワーク3について、吸着機構20を用いた搬出作業が行われる。より具体的に、この搬出作業では、作業者による把持部材23の操作に応じて、吸着本体21が、アーム部材7及び支持部材18の軸方向に沿って図13(a)に示す矢印方向に向けてスライドされ、ワーク3の保護ディスクDに吸盤部22が吸着される。そして、この吸着状態で、図13(b)に示されるように、吸着本体21を支持部材18からアーム部材7に向けて図13(b)に示す矢印方向に向けてスライドさせることによりワーク3が搬出される。そして、支持部材18とアーム部材7との接続が解除され、アーム部材7に支持されたワーク3は、操作部4の操作に応じて、所定の格納場所まで運搬される。そして、吸着機構20を用いた搬出作業が、残り2つのワーク3についても繰り返された後、全てのワーク3の搬出作業が完了する。
【0061】
[本実施形態のワーク搬出入装置1及び乾燥処理装置100の特徴]
以上、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、作業者が、アーム部材7にワーク3が保持された操作部4を移動させると、荷重バランサー装置5によって操作部4の移動に応じた駆動力が発生されるので、この駆動力によって、作業者が操作部4を容易に移動させることができる。これにより、従来のように、人力だけで、ワーク3を持ち上げたり、下ろしたり、といった作業を行う必要がなく、アーム部材7に保持されたワーク3をスライドさせるだけで、密閉容器2の内部へのワーク3の搬出入を行うことができる。従って、従来と比べて、ワーク3の搬出入を容易に行うことができる。
【0062】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3が保持されたアーム部材7の先端部70と、密閉容器2内に設けられた支持部材18の一端部180とを接続することで、ワーク3をアーム部材7から支持部材18に向けてスライドさせることができる。
【0063】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の先端部70は、その左右方向の軸中心が支持部材18の一端部180の軸中心と一致した状態で接続されるので、アーム部材7と支持部材18との芯ズレを防止でき、ワーク3の搬出入作業の作業性をより向上させることができる。
【0064】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の接続溝71を支持部材18の接続突起181に近づけていくことで、支持部材18の一端部180とアーム部材7の先端部70の軸を容易に合わせることができる。
【0065】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、接続溝71が接続突起181に接続されることで、接続溝71が障害となって接続突起181が接続溝71よりも外側に抜けることを規制できる。従って、支持部材18に接続されたアーム部材7の位置ズレを確実に防止できる。
【0066】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、固定機構8によりアーム部材7に対してワーク3を固定することができるので、ワーク3の位置ズレ等を防止でき、アーム部材7から支持部材18に向けたワーク3の搬出入の作業性を向上させることができる。
【0067】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一形状に形成されているので、アーム部材7の上面73をワーク3がスライドする際にガタツクことがなく、アーム部材7の上面に対してワーク3を安定した状態でスライドさせることができる。
【0068】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、ワーク3の保持面30と同一の曲率を有しているので、ワーク3がアーム部材7に対して平面内で回転することを防止できる。従って、ワーク3の位置ズレ等を防止でき、ワーク3の密閉容器2に対する搬出入の作業性をより向上させることができる。
【0069】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、支持部材18の上面と同一形状に形成されているので、アーム部材7の上面73及び支持部材18の上面をワーク3がスライドする際にガタツクことがなく、アーム部材7の上面73及び支持部材18の上面に対してワーク3を安定した状態でスライドさせることができる。
【0070】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の上面73が、アーム部材7の軸方向から見たときに、支持部材18の上面と同一の曲率を有しているので、ワーク3がアーム部材7や支持部材18に対して平面内で回転することを防止できる。従って、ワーク3の位置ズレ等を防止でき、ワーク3の密閉容器2に対する搬出入の作業性をより向上させることができる。
【0071】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3を保持した状態でアーム部材7に対してスライドさせるだけでワーク3を密閉容器2内から取り出すことができるので、手作業でワークを引き出す等して密閉容器内から取り出す場合と比べて、ワークの取り出し作業の作業性を向上させることができる。
【0072】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、ワーク3の保護ディスクDに吸着機構20の吸盤部22が吸着可能な吸着面さえあれば、ワーク3を吸着させた状態で密閉容器2内から取り出すことができる。従って、ワーク3の吸着に当たって複雑な機構は必要なく簡易な機構で、ワーク3の取り出し作業を実現することができる。
【0073】
また、本実施形態のワーク搬出入装置1及び乾燥処理装置100では、アーム部材7の先端部70と支持部材18の一端部180とが接続された状態で、規制溝72によってアーム部材7が前後方向に抜けることを規制できるので、安定した接続状態を維持することができる。
【0074】
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、これらの実施形態に限定されるものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0075】
上述した実施形態では、ワーク3または吸着本体21の保持面の曲率と、アーム部材7及び支持部材18の上面の曲率とが同一である例について述べたが、各曲率が同一である必要はない。より具体的には、ワーク3や吸着本体21の挿入穴が円形状を有していなくてもよく、例えば矩形状を有していてもよい。また、アーム部材7及び支持部材18の径の大きさは同じであっても異なっていてもよい。
【0076】
上述した実施形態では、アーム部材7の先端部70に略V字状の接続溝71を形成すると共に、支持部材18の一端部180に接続溝71と同じ形状の接続突起181が形成され、アーム部材7の先端部70と支持部材18の一端部180とを接続する例について述べたが、本実施形態はこれに限定されず、支持部材18の一端部180に略V字状の接続溝を形成すると共に、アーム部材7の先端部70に、この接続溝と同じ略V字状の接続突起を形成することによって、アーム部材7の先端部70と支持部材18の一端部180とを接続してもよい。また、規制溝72と突出片182の態様も他の態様でもよい。また、支持部材18との接続時にアーム部材7が動かないように固定できれば、規制溝72と突出片182を設けなくてもよい。
【0077】
上述した実施形態では、吸着機構20を用いて、密閉容器2内のワーク3を搬出する例について述べたが、本実施形態はこれに限定されず、ワーク取出機構120を用いて、密閉容器2内のワーク3を搬出してもよい。図14(a)に示されるように、ワーク取出機構120は、作業者によって把持される操作部123を有し、アーム部材7及び支持部材18の各外周面をスライド可能に挿入される筒状の取り出し本体124と、取り出し本体124の外周部に形成され且つアーム部材7の軸方向に沿って突出する3つの突出部125と、突出部125の先端部に形成された3つの爪126とを有している。なお、図14(a)中の破線部分は、同図中に実線で示すワーク取出機構120が所定距離だけアーム部材7の軸方向にスライドした状態を示している。
【0078】
一方、図14(b)に示されるように、ワーク103は、その内周面に装着される筒状の芯部分127を有しており、この芯部分127は、アーム部材7及び支持部材18の各外周面をスライド自在に形成されている。芯部分127には、径方向内側に向けて凸状に窪んだ係合溝(溝)128が形成されている。なお、この係合溝128は、芯部分127の全周に亘って形成されている。この構成によれば、ワーク取出機構120の爪126をワーク103の係合溝128に係合させた状態で、作業者が操作部123を、アーム部材7及び支持部材18の軸方向に沿ってワーク3の搬出方向に向けて取り出すことによって、密閉容器2の内部からワーク103を容易に搬出することができる。また、この構成では、吸着機構20を用いる場合のように、必ずしもワーク3が保護ディスクDを有している必要はないので、汎用性が高い。なお、係合溝128は、芯部分127の全周に亘って形成されていなくてもよく、爪126と係合さえできればよい。
【0079】
なお、図15は、爪126と係合溝128との係合手順を示している。まず、図15(a)に示されるように、爪126と係合溝128の位置合わせが行われる。次いで、図15(b)に示されるように、駆動機構により爪126が径方向内側に進行し、爪126の先端が係合溝128の奥面と当接することで、爪126と係合溝128との係合が完了する。また、吸着機構20やワーク取出機構120は、ワーク3の搬出時のみならず、搬入時に用いてもよく、搬入のみに用いてもよい。また、一部のワークの搬出や搬入だけでなく、全てのワークの搬入や搬出に用いてもよい。
【0080】
上述した実施形態では、密閉容器2に緊急避難用のエジェクタ機構が設けられていない例について述べたが、図16に示す密閉容器102のように、エジェクタ機構220を設けてもよい。このエジェクタ機構220は、作業者によって回動操作可能なハンドル部221と、作業者による回動操作を受けて、図中の矢印で示す搬出方向に向けてワークを強制的に押し出す押出板222とを有している。なお、ワークの押し出しは、手動操作に限らず、エアシリンダ等のアクチュエータを駆動源に使用してもよい。また、緊急避難用のエジェクタ機構は、押出板222に雌ネジ部(ナット部材)を形成し、先端部に雄ネジ部(ボルト部材)が形成された別部品のステッキ状のハンドル部材を用いて、このハンドル部材を押出板222に固定すると共に、このハンドル部材を図中の矢印で示す搬出方向に向けて引っ張ることで、ワークを強制的に取り出してもよい。
【0081】
上述した実施形態では、ワーク3を加熱するために、容器本体15のジャケット層154の内部や支持部材18の中空空間183に熱媒油を循環させる例について述べたが、本実施形態はこれに限定されない。ワークの種類や用途によっては、ワークを冷却するために、容器本体15のジャケット層154の内部や支持部材18の中空空間183に冷媒油を循環させもよい。
【0082】
上述した実施形態では、ワーク3として、リチウムイオンバッテリーの電極材を使用する例について述べたが、本発明はかかる実施形態に限定されず、リチウムイオンバッテリー以外の電極材、あるいは、全く種類の異なる様々な試料を搭載できる。また、上述した実施形態では、ワーク3がロール形状を有する例について述べたが、この形状に限らず、任意の形状に形成できる。
【0083】
上述した実施形態では、密閉容器2をワークの真空乾燥処理に適用する例について述べたが、本発明はかかる実施形態に限定されず、密閉容器2は処理材料の加圧熱処理や低温真空処理(フリーズドライ)や低温高圧処理等にも適用できる。
【0084】
上述した実施形態では、ワーク3の乾燥処理工程において、密閉容器2内に窒素を供給する例について述べたが、本発明はかかる実施形態に限定されるものではない。密閉容器の用途に応じて、密閉容器内に酸素を供給した場合には、密閉容器内に収容されたワークの熱酸化を促進させることができる。また例えば、密閉容器内を硫化ガスで充填した場合には、密閉容器内に収容されたワークの腐食試験を行うことができる。また、本発明は、ワークを乾燥するための容器に搬出入する場合に限らず、ワークを搬出入するものであれば、種々の用途に適用することができる。
【0085】
上述した実施形態では、荷重バランサー装置5の駆動源として、エアシリンダからなるアクチュエータを使用する例について述べたが、これ以外にも、例えば、油圧シリンダ等の流体アクチュエータや、電磁アクチュエータを使用できる。
【0086】
上述した実施形態では、ワーク3を1つずつ搬出入する例について述べたが、本発明はかかる実施形態に限定されず、ワークを複数まとめて搬出入してもよい。
【産業上の利用可能性】
【0087】
本発明を利用すれば、ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を得ることができる。
【符号の説明】
【0088】
1 ワーク搬出入装置
2、102 密閉容器(容器)
3、103 ワーク
4 操作部
5 荷重バランサー装置(駆動力発生装置)
7 アーム部材
8 固定機構
18 支持部材
20 吸着機構(ワーク取出機構)
30 保持面
70 先端部
71 接続溝
100 乾燥処理装置
120 ワーク取出機構
126 爪
127 芯部分
128 係合溝(溝)
180 一端部
181 接続突起
【特許請求の範囲】
【請求項1】
操作部と、前記操作部の移動に応じた駆動力を発生する駆動力発生装置とを備えたワーク搬出入装置であって、
前記操作部は、ワークを保持し、その保持されたワークをスライド可能なアーム部材を有していることを特徴とするワーク搬出入装置。
【請求項2】
前記アーム部材の先端部は、前記ワークを収容可能な容器内に設けられた支持部材の一端部に接続可能であることを特徴とする請求項1に記載のワーク搬出入装置。
【請求項3】
前記支持部材の一端部が、先端に近付くにつれて幅が狭くなる接続突起を有しており、 前記アーム部材の先端部が、前記接続突起と同形状の接続溝を有していることを特徴とする請求項2に記載のワーク搬出入装置。
【請求項4】
前記ワークを前記アーム部材に対して固定する固定機構を備えていることを特徴とする請求項1〜3のいずれか1項に記載のワーク搬出入装置。
【請求項5】
前記アーム部材は、その上面と前記ワークの保持面とが当接した状態で前記ワークを保持可能であって、
前記アーム部材の上面が、前記アーム部材の軸方向から見たときに、前記ワークの保持面と同一形状に形成されていることを特徴とする請求項1〜4のいずれか1項に記載のワーク搬出入装置。
【請求項6】
前記アーム部材の上面が、前記アーム部材の軸方向から見たときに、前記支持部材の上面と同一形状に形成されていることを特徴とする請求項5に記載のワーク搬出入装置。
【請求項7】
前記アーム部材に対してスライド可能に構成されたワーク取出機構を備えており、
前記ワーク取出機構は、前記ワークを保持した状態で前記アーム部材に対してスライドすることによって前記ワークを前記容器内から取り出すことを特徴とする請求項2〜6のいずれか1項に記載のワーク搬出入装置。
【請求項8】
前記ワーク取出機構は、前記ワークを吸着することによって前記ワークを保持することを特徴とする請求項7に記載のワーク搬出入装置。
【請求項9】
前記ワーク取出機構は、前記ワークの芯部分に設けられた溝に爪を引っ掛けることで、前記ワークを保持することを特徴とする請求項7に記載のワーク搬出入装置。
【請求項10】
請求項1〜9のいずれか1項に記載されたワーク搬出入装置と、
前記アーム部材に接続される前記支持部材が設けられた乾燥処理用の容器とを備えたことを特徴とする乾燥処理装置。
【請求項1】
操作部と、前記操作部の移動に応じた駆動力を発生する駆動力発生装置とを備えたワーク搬出入装置であって、
前記操作部は、ワークを保持し、その保持されたワークをスライド可能なアーム部材を有していることを特徴とするワーク搬出入装置。
【請求項2】
前記アーム部材の先端部は、前記ワークを収容可能な容器内に設けられた支持部材の一端部に接続可能であることを特徴とする請求項1に記載のワーク搬出入装置。
【請求項3】
前記支持部材の一端部が、先端に近付くにつれて幅が狭くなる接続突起を有しており、 前記アーム部材の先端部が、前記接続突起と同形状の接続溝を有していることを特徴とする請求項2に記載のワーク搬出入装置。
【請求項4】
前記ワークを前記アーム部材に対して固定する固定機構を備えていることを特徴とする請求項1〜3のいずれか1項に記載のワーク搬出入装置。
【請求項5】
前記アーム部材は、その上面と前記ワークの保持面とが当接した状態で前記ワークを保持可能であって、
前記アーム部材の上面が、前記アーム部材の軸方向から見たときに、前記ワークの保持面と同一形状に形成されていることを特徴とする請求項1〜4のいずれか1項に記載のワーク搬出入装置。
【請求項6】
前記アーム部材の上面が、前記アーム部材の軸方向から見たときに、前記支持部材の上面と同一形状に形成されていることを特徴とする請求項5に記載のワーク搬出入装置。
【請求項7】
前記アーム部材に対してスライド可能に構成されたワーク取出機構を備えており、
前記ワーク取出機構は、前記ワークを保持した状態で前記アーム部材に対してスライドすることによって前記ワークを前記容器内から取り出すことを特徴とする請求項2〜6のいずれか1項に記載のワーク搬出入装置。
【請求項8】
前記ワーク取出機構は、前記ワークを吸着することによって前記ワークを保持することを特徴とする請求項7に記載のワーク搬出入装置。
【請求項9】
前記ワーク取出機構は、前記ワークの芯部分に設けられた溝に爪を引っ掛けることで、前記ワークを保持することを特徴とする請求項7に記載のワーク搬出入装置。
【請求項10】
請求項1〜9のいずれか1項に記載されたワーク搬出入装置と、
前記アーム部材に接続される前記支持部材が設けられた乾燥処理用の容器とを備えたことを特徴とする乾燥処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−45677(P2012−45677A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−190821(P2010−190821)
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000108797)エスペック株式会社 (282)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月27日(2010.8.27)
【出願人】(000108797)エスペック株式会社 (282)
【Fターム(参考)】
[ Back to top ]