
ワーク搬送装置

【課題】構造の簡素化による小型化及び初期設備費用を低減でき、かつメンテナンス性に優れたワーク搬送装置を提供する。
【解決手段】隣接する工程間でワークを搬送するワーク搬送装置1は、ワークを保持してガイドレール51に沿って移動可能な保持手段6と、ガイドレール51に沿って張設される張設部を有し、この張設部に保持手段6が固定された索状体7と、索状体7が巻き掛けられ、動滑車8,9を含む複数の滑車と、動滑車8,9をそれぞれ移動させるエアシリンダ11,12とを備え、張設部の一方の側において、索状体7は、その一端部71が固定されると共に、一端部71から張設部に至る部分に動滑車8,9が巻き掛けられ、エアシリンダ11,12により、索状体7の一端部71から張設部に至る部分が張る方向に動滑車8,9を移動させることで、張設部に固定された保持手段6を張設部の一方の側に移動させるように構成される。
【解決手段】隣接する工程間でワークを搬送するワーク搬送装置1は、ワークを保持してガイドレール51に沿って移動可能な保持手段6と、ガイドレール51に沿って張設される張設部を有し、この張設部に保持手段6が固定された索状体7と、索状体7が巻き掛けられ、動滑車8,9を含む複数の滑車と、動滑車8,9をそれぞれ移動させるエアシリンダ11,12とを備え、張設部の一方の側において、索状体7は、その一端部71が固定されると共に、一端部71から張設部に至る部分に動滑車8,9が巻き掛けられ、エアシリンダ11,12により、索状体7の一端部71から張設部に至る部分が張る方向に動滑車8,9を移動させることで、張設部に固定された保持手段6を張設部の一方の側に移動させるように構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、隣接する工程間でワークの搬送を行うワーク搬送装置に関する。
【背景技術】
【0002】
ワーク搬送装置に関しては種々のものが提案、実施されており、例えば車体部品等の搬送装置について、省スペース化や設備コストの低減などの観点から、以下の搬送装置が提案されている。
【0003】
例えば、下記特許文献1には、ローディング・アンローディング用ロボットがワーク搬送装置を兼ねるワークの自動加工ラインが開示されている。同加工ラインにおいては、各工作機械に対してワークのローディング・アンローディングを行う複数のロボットが配設され、これら複数のロボット同士が直接ワークの受け渡し可能なように構成されている。
【0004】
しかしながら、上述のようにローディング・アンローディング用ロボットがワーク搬送装置を兼ねる構成の場合、設備の大型化・複雑化に伴う設備コストの増大が懸念される。また、何らかの事由でロボットが故障した場合、復旧までに時間が掛かる問題がある。
【0005】
また、下記特許文献2には、ワーク搬送装置をガントリーローダで構成したものが開示されているが、この搬送装置では、レール上を移動するローダ自体に送りモータ等の駆動機構が一体的に設けられるため、搬送機構が複雑化し、ひいては搬送装置の大型化につながる。また、ローダは加工ラインの上方に架設された搬送梁に懸架される形で設置されることから、メインテナンス作業に手間が掛かるという問題もある。
【特許文献1】特開平6−63879号公報
【特許文献2】特開2002−103166号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
以上の事情に鑑み、本発明では、構造の簡素化による小型化が可能なワーク搬送装置を提供することを技術的課題とする。
【0007】
また、本発明では、初期設備費用を低減でき、かつ、メンテナンス性に優れたワーク搬送装置を提供することを他の技術的課題とする。
【課題を解決するための手段】
【0008】
前記課題の解決は、本発明の一の側面に係るワーク搬送装置により達成される。すなわち、このワーク搬送装置は、隣接する工程間に配置され、工程間でワークを搬送するワーク搬送装置において、ワークを保持し、ガイド手段に沿って移動可能な保持手段と、ガイド手段に沿って張設される張設部を有し、張設部に保持手段が固定された索状体と、索状体が巻き掛けられ、少なくとも1つの動滑車を含む複数の滑車と、動滑車を移動させる駆動手段とを備え、張設部の一方の側において、索状体は、その一端部が固定されると共に、一端部から張設部に至る部分に動滑車が巻き掛けられ、駆動手段により、索状体の一端部から張設部に至る部分が張る方向に動滑車を移動させることで、張設部に固定された保持手段を張設部の一方の側に移動させる点をもって特徴付けられる。なお、ここでいう「索状体」には、ロープやワイヤ、ケーブル、チェーン、ベルトなど、およそ帯紐状をなし機械要素として用いられるもの全てが含まれる。
【0009】
このように、上記構成に係るワーク搬送装置であれば、動滑車の移動に伴い索状体が動滑車に引っ張られる形で移動する。この際、索状体の動滑車が巻き掛けられた側の端部は固定されているため、当該一端部からガイド手段に沿って張設された部分までが動滑車の側に向けて引っ張られることになる。これにより、索状体の上記張設部に固定されたワークの保持手段がガイド手段に沿って移動し、これに保持されるワークが一体的に移動する。また、上述のように索状体が引っ張られて移動することで、索状体に固定された保持手段のストロークが動滑車のそれに比べて2倍もしくはそれ以上になる。
【0010】
以上の作用より、ワークの搬送に必要な動滑車の移動量を小さく抑えて、動滑車ないしこの動滑車を移動させる駆動手段を備えるワーク搬送装置の小型化を図ることができる。また、上述のように、索状体や滑車等でワーク搬送装置を構成したので、当該搬送装置の構造を簡素化でき、これによっても搬送装置の小型化を図ることができる。また装置が小さくなることで、各工程の加工設備内にワーク搬送装置の一部が入り込む事態を回避して、切粉等のワーク搬送装置内への侵入を可及的に阻止することができる。ワーク搬送装置の後付けも容易となる。
【0011】
また、索状体を動力伝達部材として用いることで、動滑車もしくはこの動滑車を移動させるための駆動手段を自由に配置できるようになるため、設置可能なスペースの形状や大きさに応じて、ワーク搬送装置を比較的自由にレイアウトすることができる。加えて、構造が簡素なもので済むため、設備費も少なくできかつメンテナンス等も容易に実施可能である。
【0012】
この場合、駆動手段としては、動滑車の移動に要する負荷が比較的小さくて済み、また、必要となる動滑車の移動距離もワーク搬送距離に比べて半分以下でよいことから、例えばエアシリンダなど汎用の直動型アクチュエータを採用することができる。
【0013】
また、動滑車の配設個数に関し、例えば必要となるワークの搬送ストローク量に応じて複数の滑車が複数の動滑車を含むと共に、動滑車にそれぞれエアシリンダ等の駆動手段を設けるようにしてもよい。これにより、1個の駆動手段における動滑車の移動量を正確に制御しなくとも、例えば相互に移動量の異なる複数の駆動手段を用いることで、ワークの搬送ストローク量を調整することができる。また、標準エアシリンダのようにストロークは比較的小さいものであっても、これら複数の駆動手段を使用することにより大きなストロークを得ることができる。
【0014】
また、上記構成において、張設部に固定された保持手段を張設部の一方の側に移動させる途中で、各々の駆動手段の作動と非作動とを切替えることで、保持手段の移動速度を途中で変動可能となるように構成することも可能である。これによれば、例えば搬送中と搬送先の工程へワークを投入する際とでワークの搬送速度を変更することができ、安定かつ効率的な搬送を行うことができる。この構成は、例えば駆動手段による動滑車の移動速度が相互に異なる複数の駆動手段を使用することでも達成でき、あるいは、複数の駆動手段の作動開始時期を相互に異ならせることによっても達成することができる。
【0015】
また、張設部の他方の側において、索状体は、張設部からその他端部に至る部分の長さがバランスウェイトによって可変調整され、駆動手段により、索状体の一端部から張設部に至る部分が緩む方向に動滑車を移動させることで、張設部に固定された保持手段を張設部の他方の側に移動させるように構成することも可能である。このようにすれば、動滑車用の駆動手段のみで、保持手段の往復移動が可能となり、より一層の構造の簡素化が図られる。また、バランスウェイトを用いることで、動力エネルギーを必要とする他の駆動手段を用いずに済むため、経済的な面でも好ましい。
【発明の効果】
【0016】
以上のように、本発明によれば、構造の簡素化による小型化が可能なワーク搬送装置を提供することができる。また、初期設備費用を低減でき、かつ、メンテナンス性に優れたワーク搬送装置を提供することができる。
【発明を実施するための最良の形態】
【0017】
以下、本発明に係るワーク搬送装置の一実施形態を図面に基づき説明する。
【0018】
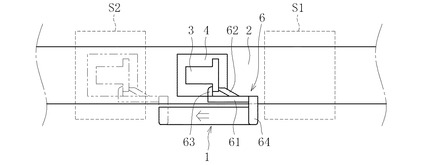
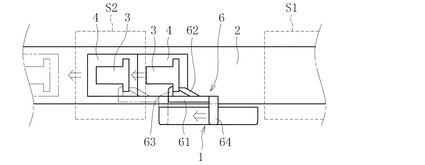
図1は、本発明の一実施形態に係るワーク搬送装置を組み込んだ加工ラインを概念的に示す平面図である。ここで、ワーク搬送装置1は、相互に隣接する工程S1,S2間に配設されており、工程S1,S2間に配設される搬送レール2を介してワーク3を搬送するようになっている。なお、この実施形態では、ホルダー4等の載置・保持用治具にセットした状態のワーク3をワーク搬送装置1により搬送するようにしている。
【0019】
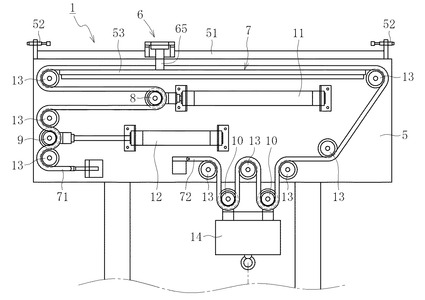
図2は、ワーク搬送装置1の全体構成を示す正面図である。このワーク搬送装置1は、ワークの保持手段6、索状体7、動滑車8,9、および、駆動手段としてのエアシリンダ11,12を主たる構成要素として備える。この実施形態では、板状の基部5を配置し、この基部5の上面部に保持手段6が配設されると共に、基部5の側面に動滑車8,9、および、エアシリンダ11,12が固定され、かつ、動滑車8,9に索状体7が巻き掛けられている。以下、各構成要素の詳細を説明する。
【0020】
保持手段6は、図1に示すようにアーム61と、アーム61に取り付けられた一対の挟持用爪部62,63とを主に備えるもので、アーム先端側の爪部63と後端側の爪部62の一方もしくは双方を開閉させることで、当該爪部62,63によるワーク3(ここではシリンダブロックのフランジ)の挟持もしくは挟持の解除がなされるようになっている。アーム61の基端はアームプレート64に固定されると共に、このアームプレート64は基部5の上面に形成されたガイド手段としてのガイドレール51に摺動可能に嵌合されている。ガイドレール51は搬送レール2と平行になるよう配置されている。また、アームプレート64にはブラケット65が一体に形成されており、このブラケット65を介してアームプレート64と索状体7とが連結されている。以上の構成により、索状体7の移動に伴い保持手段6がガイドレール51に沿ってスライドし、双方の爪部62,63によりワーク3を挟持した状態では、図1に示すように、搬送レール2上のワーク3を次工程S2(図1中2点鎖線で示す位置)へ向けて搬送するようになっている。
【0021】
なお、爪部62,63の開閉機構の詳細については省略するが、例えば、上記爪部62,63はアーム61との連結部を支点として適当な駆動手段(エアシリンダやスプリングなど)により、ワーク3をクランプ可能に構成されており、また、適当な位置センサをアーム61の先端に設けることで、ワーク3のクランプ・アンクランプの切り替えを可能としている。
【0022】
索状体7は、この実施形態ではローラーチェーンであり、基部5の側面に取り付けられた複数の動滑車8,9や定滑車13(ここでは何れもスプロケット)に巻き掛けることで、これら滑車要素を支点とする所定の経路を形成するように取り付けられている。ここで、索状体7は、巻き掛け伝動の如く輪状にして取り付けるのではなく、少なくとも後述する動滑車8,9を巻き掛けた側の端部71を適当な固定手段(チェーンボルトなど)により基部5に固定すると共に、他端72の側にワーク3の搬送距離に応じた遊び、言い換えると、上記経路の形状を変化させる向きに移動可能な部分を持たせて、当該遊びの長さの分だけ索状体7を移動可能としている。
【0023】
詳述すると、基部5の上方には搬送レール2およびガイドレール51と平行に板状のチェーンガイド53が設けられており、このチェーンガイド53の両端に定滑車13,13が配設されている。索状体7は所定の張力を受けた状態でチェーンガイド53上に載置され、その両端部は上記双方の定滑車13,13に索状体7を掛けることで、索状体7が保持手段6と平行に移動するようになっている。
【0024】
また、保持手段6のストローク可能な領域(ここでは、後述するチェーンガイド53の長手幅領域)の両端に配設された定滑車13,13のうち、次工程S2側の定滑車13の下方には、駆動用の動滑車8,9がそれぞれ定滑車13,13,13と交互に隣合う位置に配設されている。この図示例では、各滑車13,8,13,9,13は一直線上に配設され、また、鉛直方向に沿って配設されている。ここで、索状体7の、チェーンガイド53上に張設される部分と次工程S2側でつながる部分は、動滑車8,9の内側(ワーク搬送装置1の中央側)に巻き掛けられると共に、これら動滑車8,9と隣接する定滑車13,13,13に対してはその外側に巻き掛けられている。従い、エアシリンダ11,12はそれぞれ動滑車8,9とその内側で連結され、エアシリンダ11,12の引き込みにより動滑車8,9を内側に移動させることで索状体7が内側に引張られるようになっている。なお、この実施形態では、相互にストロークの異なるエアシリンダ11,12が駆動側の動滑車8,9にそれぞれ連結されている。
【0025】
また、索状体7の従動側端部72は、この図示例では駆動側と同様、チェーンボルト等で基部5に固定されると共に、基部5の側面の下方領域には、従動用の動滑車10,10がそれぞれ定滑車13,13,13と交互に隣合う位置に配設されている。この図示例では、各滑車13,10,13,10,13は水平方向に一列に配設されている。ここで、索状体7の、チェーンガイド53上に張設される部分と前工程S1でつながる部分は、動滑車10,10の外側(ワーク搬送装置1の下方側)に巻き掛けられると共に、これら動滑車10,10と隣接する定滑車13,13,13に対してはその内側(ワーク搬送装置1の中央側)に巻き掛けられている。なお、上述の滑車(動滑車8〜10、定滑車13を問わず)については、歯付きのスプロケットに限定されず、例えば平滑な傾斜面を有するプーリ等、使用する索状体7の種類に応じて既知の滑車要素を採用することができる。
【0026】
また、後述するが、ワーク搬送後の保持手段6を図2に示す初期位置に復帰させるために、この実施形態では、動滑車10,10の下方にバランスをとるためのウェイト14を取り付けている。この構成によれば、索状体7に対して常に一定の張力が作用することになるため、保持手段6ひいてはワーク3の搬送距離を正確に制御する点においても有効である。なお、図示は省略するが、ウェイト14のバランスないし円滑な運動を確保する目的でウェイト14と接地面(ここでは設置面に固定した別のウェイト)との間にスプリングバランサーを取り付けるようにしても構わない。
【0027】
次に、上記構成に係るワーク搬送装置1の使用態様の一例を説明する。
【0028】
まず、前工程S1から搬送されたワーク3が搬送方向所定位置を通過したことを確認した後、アーム61先端側の爪部63を図1に示す位置まで閉じる(初期状態では、当該爪部63はアーム61先端側に開いている)。そして、アーム61後端側の爪部62も併せて閉じることでワーク3の一部を挟持する。これにより、保持手段6とワーク3とが一体に移動可能な状態となる。このようにワーク3を挟持した状態では、保持手段6はガイドレール51上の最も前工程S1に近い側に位置している(図2を参照)。また、駆動側の動滑車8,9を移動させるためのエアシリンダ11,12についてもストロークを最も長く取った状態(ピストンを最大限伸ばした状態)にある(図2を参照)。
【0029】
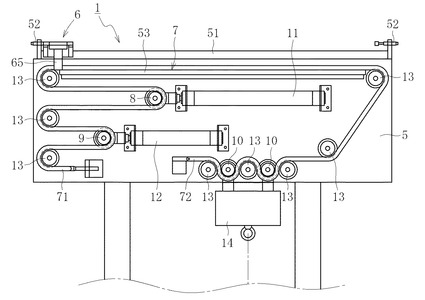
次に、長尺側のエアシリンダ(第1エアシリンダ)11を作動させてピストンを引き込む。これにより、このピストンと連結された駆動側の動滑車8が、この動滑車8に巻き掛けられた索状体7を引張る向きに移動する。この際、索状体7の駆動側端部71は基部5に固定されているため、索状体7のうち、動滑車8に巻き掛けられた部分からチェーンガイド73、そして、従動側の端部72に至る部分が動滑車8に向けて引張られる。これにより、索状体7に固定された保持手段6がガイドレール51上をスライドし、かつ、これに挟持されるワーク3も工程S2の側に向けて搬送レール2上を移動する。また、この際、動滑車8と隣合う位置に定滑車13を配設して索状体7を支持する形態を採っている(図2を参照)ことから、索状体7に固定された保持手段6のストローク量は、図3に示す如く動滑車8の移動量の2倍となる。なお、この際、ウェイト14の移動量(上昇量)は、動滑車8のストローク量の2分の1、言い換えると、保持手段6のストローク量の4分の1に等しい。
【0030】
このようにして、ワーク3を工程S2側に向けて所定距離、ここでは第1エアシリンダ11の最大引き込みストロークの2倍の距離を移動させた後、続いて、短尺側のエアシリンダ(第2エアシリンダ)12を作動させてピストンを引き込む。これにより、このピストンと連結された同じく駆動側の動滑車9が、この動滑車9に巻き掛けられた索状体7を引張る向きに移動し、索状体7に固定された保持手段6およびこの保持手段6に挟持されたワーク3が、動滑車9のストロークの2倍の距離を工程S2に向けて移動する。なお、この際のウェイト14の移動量は、上記と同様、保持手段6のストローク量の4分の1に等しい。
【0031】
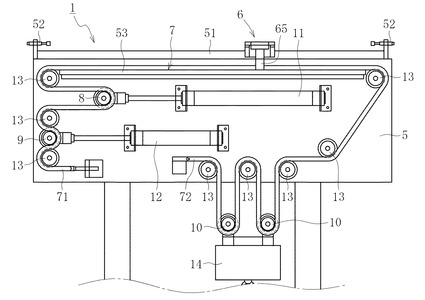
以上の動作を経て、図4に示すように、保持手段6がガイドレール51上をその工程S1側の端部から工程S2側の端部にまで移動し、これにより、保持手段6に保持されたワーク3が搬送レール2を介して工程S2中の所定位置に搬送される(図1を参照)。ここで、各エアシリンダ11,12による動滑車8,9の移動量の合計の2倍が保持手段6の総移動量に一致することから、保持手段6によるワーク3の搬送開始位置から搬送終了位置までの距離に合わせて各エアシリンダ11,12のストローク量が調整される。もちろん、図2に示すように、ガイドレール51の搬送先(工程S2)の側の端部にショックアブソーバ52を配設しておくことで、保持手段6(のアームプレート64)の位置を規制するようにしても構わない。
【0032】
このようにしてワーク3を工程S2中の所定位置まで搬送した後、まず爪部62,63を開くことでワーク3の拘束(挟持)状態を解除し、然る後、エアシリンダ11,12のピストンを図2に示す位置に復帰させる。この動作に伴い、従動側の動滑車10から索状体7の駆動側端部71に至る部分が、ウェイト14の自重により動滑車10の側に向けて引張られ、索状体7に固定された保持手段6が工程S2側から工程S1の側に向けて移動(後退)する。このようにして、ワーク3の搬送サイクルが完了する。なお、後退に際しても、搬送時と同様、ガイドレール51の搬送元(工程S1)の側の端部にショックアブソーバ52を配設しておいても構わない(図2を参照)。
【0033】
以上、本発明の一実施形態を説明したが、本発明に係るワーク搬送装置は、本発明の範囲内において任意に変更が可能である。
【0034】
例えば、図1に示す搬送態様では、工程S2中の所定位置がフリースペースである(別のワーク3が存在しない)ことが前提となるところ、作業効率の向上のためには、以下の搬送方法を採ることも可能である。例えば図2に示す構成のワーク搬送装置1を用いた場合、第1エアシリンダ11のピストンの引き込みにより動滑車8を装置内側に移動させていき、図5に示す中間位置まで移動させた段階で、第2エアシリンダ12を併せて駆動させる。これにより、2個の動滑車8,9が共に内側へ移動を開始するので、これら動滑車8,9の移動に伴う索状体7の引張り速度は単一エアシリンダ11による引張り時の2倍となる。そのため、保持手段6のスライド速度、ひいてはワーク3の搬送速度も2倍となる。このようにしてワーク3の搬送速度を搬送途中で変えることができれば、例えば図6に示すように、搬送先の工程S2中に別のワーク3が存在する場合でも、後続のワーク3で搬送先にある別のワーク3を押出すことができる(図6中2点鎖線で示す位置に)。
【0035】
あるいは、上記搬送態様は、後続のエアシリンダ12の引き込み速度を先行するエアシリンダ11のそれより大きくすることによっても達成することが可能である。すなわち、図示は省略するが、図3の如く、先に第1エアシリンダ11により対応する動滑車8を最大限内側まで移動させた状態から、相対的に引き込み速度の大きい第2エアシリンダ12で対応する動滑車9を移動させることで、既に工程S2中にある別のワーク3を押し出すことも可能である。
【0036】
なお、後続の搬送中のワーク3でもって搬送先の工程S2から先行するワーク3を押出し可能である限りにおいて、搬送速度の切替え時期(増大開始時期)は任意であり、例えば図6に示すように、前後のワーク3,3同士(この場合ホルダー4,4同士)が干渉した段階であってもよいし、この直前段階であってもよい。
【0037】
また、上記実施形態では、動滑車8,9に対応する駆動手段としてエアシリンダ11,12を例示したが、特にこの種の駆動手段に限定される必要はなく、例えば直動型のアクチュエータなど種々のアクチュエータを採用することができる。
【0038】
また、従動側の構成に関し、上記実施形態では、索状体7の従動側端部72を基部5に固定すると共に、途中に設けた従動用の動滑車10,10にウェイト14を懸架する形態を採っていたが、特にこの構成に限る必要はない。例えば図示は省略するが、従動側の端部72に直接ウェイト14を懸架することで、従動用の動滑車10を用いることなく、保持手段6の上記ストロークが可能となる。
【図面の簡単な説明】
【0039】
【図1】本発明の一実施形態に係るワーク搬送装置を組み込んだワーク加工ラインを概念的に示す平面図である。
【図2】ワーク搬送開始時におけるワーク搬送装置の正面図である。
【図3】ワーク搬送装置の使用態様の一例を示す正面図である。
【図4】ワーク搬送完了時におけるワーク搬送装置の正面図である。
【図5】ワーク搬送装置の使用態様の他の例を示す正面図である。
【図6】ワーク搬送態様の他の例を概念的に示すワーク加工ラインの平面図である。
【符号の説明】
【0040】
1 ワーク搬送装置
2 搬送レール
3 ワーク
5 基部
6 保持手段
7 索状体
8,9 動滑車(駆動用)
10 動滑車(従動用)
11,12 エアシリンダ
13 定滑車
14 ウェイト
62,63 爪部
S1 前工程
S2 次工程
【技術分野】
【0001】
本発明は、隣接する工程間でワークの搬送を行うワーク搬送装置に関する。
【背景技術】
【0002】
ワーク搬送装置に関しては種々のものが提案、実施されており、例えば車体部品等の搬送装置について、省スペース化や設備コストの低減などの観点から、以下の搬送装置が提案されている。
【0003】
例えば、下記特許文献1には、ローディング・アンローディング用ロボットがワーク搬送装置を兼ねるワークの自動加工ラインが開示されている。同加工ラインにおいては、各工作機械に対してワークのローディング・アンローディングを行う複数のロボットが配設され、これら複数のロボット同士が直接ワークの受け渡し可能なように構成されている。
【0004】
しかしながら、上述のようにローディング・アンローディング用ロボットがワーク搬送装置を兼ねる構成の場合、設備の大型化・複雑化に伴う設備コストの増大が懸念される。また、何らかの事由でロボットが故障した場合、復旧までに時間が掛かる問題がある。
【0005】
また、下記特許文献2には、ワーク搬送装置をガントリーローダで構成したものが開示されているが、この搬送装置では、レール上を移動するローダ自体に送りモータ等の駆動機構が一体的に設けられるため、搬送機構が複雑化し、ひいては搬送装置の大型化につながる。また、ローダは加工ラインの上方に架設された搬送梁に懸架される形で設置されることから、メインテナンス作業に手間が掛かるという問題もある。
【特許文献1】特開平6−63879号公報
【特許文献2】特開2002−103166号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
以上の事情に鑑み、本発明では、構造の簡素化による小型化が可能なワーク搬送装置を提供することを技術的課題とする。
【0007】
また、本発明では、初期設備費用を低減でき、かつ、メンテナンス性に優れたワーク搬送装置を提供することを他の技術的課題とする。
【課題を解決するための手段】
【0008】
前記課題の解決は、本発明の一の側面に係るワーク搬送装置により達成される。すなわち、このワーク搬送装置は、隣接する工程間に配置され、工程間でワークを搬送するワーク搬送装置において、ワークを保持し、ガイド手段に沿って移動可能な保持手段と、ガイド手段に沿って張設される張設部を有し、張設部に保持手段が固定された索状体と、索状体が巻き掛けられ、少なくとも1つの動滑車を含む複数の滑車と、動滑車を移動させる駆動手段とを備え、張設部の一方の側において、索状体は、その一端部が固定されると共に、一端部から張設部に至る部分に動滑車が巻き掛けられ、駆動手段により、索状体の一端部から張設部に至る部分が張る方向に動滑車を移動させることで、張設部に固定された保持手段を張設部の一方の側に移動させる点をもって特徴付けられる。なお、ここでいう「索状体」には、ロープやワイヤ、ケーブル、チェーン、ベルトなど、およそ帯紐状をなし機械要素として用いられるもの全てが含まれる。
【0009】
このように、上記構成に係るワーク搬送装置であれば、動滑車の移動に伴い索状体が動滑車に引っ張られる形で移動する。この際、索状体の動滑車が巻き掛けられた側の端部は固定されているため、当該一端部からガイド手段に沿って張設された部分までが動滑車の側に向けて引っ張られることになる。これにより、索状体の上記張設部に固定されたワークの保持手段がガイド手段に沿って移動し、これに保持されるワークが一体的に移動する。また、上述のように索状体が引っ張られて移動することで、索状体に固定された保持手段のストロークが動滑車のそれに比べて2倍もしくはそれ以上になる。
【0010】
以上の作用より、ワークの搬送に必要な動滑車の移動量を小さく抑えて、動滑車ないしこの動滑車を移動させる駆動手段を備えるワーク搬送装置の小型化を図ることができる。また、上述のように、索状体や滑車等でワーク搬送装置を構成したので、当該搬送装置の構造を簡素化でき、これによっても搬送装置の小型化を図ることができる。また装置が小さくなることで、各工程の加工設備内にワーク搬送装置の一部が入り込む事態を回避して、切粉等のワーク搬送装置内への侵入を可及的に阻止することができる。ワーク搬送装置の後付けも容易となる。
【0011】
また、索状体を動力伝達部材として用いることで、動滑車もしくはこの動滑車を移動させるための駆動手段を自由に配置できるようになるため、設置可能なスペースの形状や大きさに応じて、ワーク搬送装置を比較的自由にレイアウトすることができる。加えて、構造が簡素なもので済むため、設備費も少なくできかつメンテナンス等も容易に実施可能である。
【0012】
この場合、駆動手段としては、動滑車の移動に要する負荷が比較的小さくて済み、また、必要となる動滑車の移動距離もワーク搬送距離に比べて半分以下でよいことから、例えばエアシリンダなど汎用の直動型アクチュエータを採用することができる。
【0013】
また、動滑車の配設個数に関し、例えば必要となるワークの搬送ストローク量に応じて複数の滑車が複数の動滑車を含むと共に、動滑車にそれぞれエアシリンダ等の駆動手段を設けるようにしてもよい。これにより、1個の駆動手段における動滑車の移動量を正確に制御しなくとも、例えば相互に移動量の異なる複数の駆動手段を用いることで、ワークの搬送ストローク量を調整することができる。また、標準エアシリンダのようにストロークは比較的小さいものであっても、これら複数の駆動手段を使用することにより大きなストロークを得ることができる。
【0014】
また、上記構成において、張設部に固定された保持手段を張設部の一方の側に移動させる途中で、各々の駆動手段の作動と非作動とを切替えることで、保持手段の移動速度を途中で変動可能となるように構成することも可能である。これによれば、例えば搬送中と搬送先の工程へワークを投入する際とでワークの搬送速度を変更することができ、安定かつ効率的な搬送を行うことができる。この構成は、例えば駆動手段による動滑車の移動速度が相互に異なる複数の駆動手段を使用することでも達成でき、あるいは、複数の駆動手段の作動開始時期を相互に異ならせることによっても達成することができる。
【0015】
また、張設部の他方の側において、索状体は、張設部からその他端部に至る部分の長さがバランスウェイトによって可変調整され、駆動手段により、索状体の一端部から張設部に至る部分が緩む方向に動滑車を移動させることで、張設部に固定された保持手段を張設部の他方の側に移動させるように構成することも可能である。このようにすれば、動滑車用の駆動手段のみで、保持手段の往復移動が可能となり、より一層の構造の簡素化が図られる。また、バランスウェイトを用いることで、動力エネルギーを必要とする他の駆動手段を用いずに済むため、経済的な面でも好ましい。
【発明の効果】
【0016】
以上のように、本発明によれば、構造の簡素化による小型化が可能なワーク搬送装置を提供することができる。また、初期設備費用を低減でき、かつ、メンテナンス性に優れたワーク搬送装置を提供することができる。
【発明を実施するための最良の形態】
【0017】
以下、本発明に係るワーク搬送装置の一実施形態を図面に基づき説明する。
【0018】
図1は、本発明の一実施形態に係るワーク搬送装置を組み込んだ加工ラインを概念的に示す平面図である。ここで、ワーク搬送装置1は、相互に隣接する工程S1,S2間に配設されており、工程S1,S2間に配設される搬送レール2を介してワーク3を搬送するようになっている。なお、この実施形態では、ホルダー4等の載置・保持用治具にセットした状態のワーク3をワーク搬送装置1により搬送するようにしている。
【0019】
図2は、ワーク搬送装置1の全体構成を示す正面図である。このワーク搬送装置1は、ワークの保持手段6、索状体7、動滑車8,9、および、駆動手段としてのエアシリンダ11,12を主たる構成要素として備える。この実施形態では、板状の基部5を配置し、この基部5の上面部に保持手段6が配設されると共に、基部5の側面に動滑車8,9、および、エアシリンダ11,12が固定され、かつ、動滑車8,9に索状体7が巻き掛けられている。以下、各構成要素の詳細を説明する。
【0020】
保持手段6は、図1に示すようにアーム61と、アーム61に取り付けられた一対の挟持用爪部62,63とを主に備えるもので、アーム先端側の爪部63と後端側の爪部62の一方もしくは双方を開閉させることで、当該爪部62,63によるワーク3(ここではシリンダブロックのフランジ)の挟持もしくは挟持の解除がなされるようになっている。アーム61の基端はアームプレート64に固定されると共に、このアームプレート64は基部5の上面に形成されたガイド手段としてのガイドレール51に摺動可能に嵌合されている。ガイドレール51は搬送レール2と平行になるよう配置されている。また、アームプレート64にはブラケット65が一体に形成されており、このブラケット65を介してアームプレート64と索状体7とが連結されている。以上の構成により、索状体7の移動に伴い保持手段6がガイドレール51に沿ってスライドし、双方の爪部62,63によりワーク3を挟持した状態では、図1に示すように、搬送レール2上のワーク3を次工程S2(図1中2点鎖線で示す位置)へ向けて搬送するようになっている。
【0021】
なお、爪部62,63の開閉機構の詳細については省略するが、例えば、上記爪部62,63はアーム61との連結部を支点として適当な駆動手段(エアシリンダやスプリングなど)により、ワーク3をクランプ可能に構成されており、また、適当な位置センサをアーム61の先端に設けることで、ワーク3のクランプ・アンクランプの切り替えを可能としている。
【0022】
索状体7は、この実施形態ではローラーチェーンであり、基部5の側面に取り付けられた複数の動滑車8,9や定滑車13(ここでは何れもスプロケット)に巻き掛けることで、これら滑車要素を支点とする所定の経路を形成するように取り付けられている。ここで、索状体7は、巻き掛け伝動の如く輪状にして取り付けるのではなく、少なくとも後述する動滑車8,9を巻き掛けた側の端部71を適当な固定手段(チェーンボルトなど)により基部5に固定すると共に、他端72の側にワーク3の搬送距離に応じた遊び、言い換えると、上記経路の形状を変化させる向きに移動可能な部分を持たせて、当該遊びの長さの分だけ索状体7を移動可能としている。
【0023】
詳述すると、基部5の上方には搬送レール2およびガイドレール51と平行に板状のチェーンガイド53が設けられており、このチェーンガイド53の両端に定滑車13,13が配設されている。索状体7は所定の張力を受けた状態でチェーンガイド53上に載置され、その両端部は上記双方の定滑車13,13に索状体7を掛けることで、索状体7が保持手段6と平行に移動するようになっている。
【0024】
また、保持手段6のストローク可能な領域(ここでは、後述するチェーンガイド53の長手幅領域)の両端に配設された定滑車13,13のうち、次工程S2側の定滑車13の下方には、駆動用の動滑車8,9がそれぞれ定滑車13,13,13と交互に隣合う位置に配設されている。この図示例では、各滑車13,8,13,9,13は一直線上に配設され、また、鉛直方向に沿って配設されている。ここで、索状体7の、チェーンガイド53上に張設される部分と次工程S2側でつながる部分は、動滑車8,9の内側(ワーク搬送装置1の中央側)に巻き掛けられると共に、これら動滑車8,9と隣接する定滑車13,13,13に対してはその外側に巻き掛けられている。従い、エアシリンダ11,12はそれぞれ動滑車8,9とその内側で連結され、エアシリンダ11,12の引き込みにより動滑車8,9を内側に移動させることで索状体7が内側に引張られるようになっている。なお、この実施形態では、相互にストロークの異なるエアシリンダ11,12が駆動側の動滑車8,9にそれぞれ連結されている。
【0025】
また、索状体7の従動側端部72は、この図示例では駆動側と同様、チェーンボルト等で基部5に固定されると共に、基部5の側面の下方領域には、従動用の動滑車10,10がそれぞれ定滑車13,13,13と交互に隣合う位置に配設されている。この図示例では、各滑車13,10,13,10,13は水平方向に一列に配設されている。ここで、索状体7の、チェーンガイド53上に張設される部分と前工程S1でつながる部分は、動滑車10,10の外側(ワーク搬送装置1の下方側)に巻き掛けられると共に、これら動滑車10,10と隣接する定滑車13,13,13に対してはその内側(ワーク搬送装置1の中央側)に巻き掛けられている。なお、上述の滑車(動滑車8〜10、定滑車13を問わず)については、歯付きのスプロケットに限定されず、例えば平滑な傾斜面を有するプーリ等、使用する索状体7の種類に応じて既知の滑車要素を採用することができる。
【0026】
また、後述するが、ワーク搬送後の保持手段6を図2に示す初期位置に復帰させるために、この実施形態では、動滑車10,10の下方にバランスをとるためのウェイト14を取り付けている。この構成によれば、索状体7に対して常に一定の張力が作用することになるため、保持手段6ひいてはワーク3の搬送距離を正確に制御する点においても有効である。なお、図示は省略するが、ウェイト14のバランスないし円滑な運動を確保する目的でウェイト14と接地面(ここでは設置面に固定した別のウェイト)との間にスプリングバランサーを取り付けるようにしても構わない。
【0027】
次に、上記構成に係るワーク搬送装置1の使用態様の一例を説明する。
【0028】
まず、前工程S1から搬送されたワーク3が搬送方向所定位置を通過したことを確認した後、アーム61先端側の爪部63を図1に示す位置まで閉じる(初期状態では、当該爪部63はアーム61先端側に開いている)。そして、アーム61後端側の爪部62も併せて閉じることでワーク3の一部を挟持する。これにより、保持手段6とワーク3とが一体に移動可能な状態となる。このようにワーク3を挟持した状態では、保持手段6はガイドレール51上の最も前工程S1に近い側に位置している(図2を参照)。また、駆動側の動滑車8,9を移動させるためのエアシリンダ11,12についてもストロークを最も長く取った状態(ピストンを最大限伸ばした状態)にある(図2を参照)。
【0029】
次に、長尺側のエアシリンダ(第1エアシリンダ)11を作動させてピストンを引き込む。これにより、このピストンと連結された駆動側の動滑車8が、この動滑車8に巻き掛けられた索状体7を引張る向きに移動する。この際、索状体7の駆動側端部71は基部5に固定されているため、索状体7のうち、動滑車8に巻き掛けられた部分からチェーンガイド73、そして、従動側の端部72に至る部分が動滑車8に向けて引張られる。これにより、索状体7に固定された保持手段6がガイドレール51上をスライドし、かつ、これに挟持されるワーク3も工程S2の側に向けて搬送レール2上を移動する。また、この際、動滑車8と隣合う位置に定滑車13を配設して索状体7を支持する形態を採っている(図2を参照)ことから、索状体7に固定された保持手段6のストローク量は、図3に示す如く動滑車8の移動量の2倍となる。なお、この際、ウェイト14の移動量(上昇量)は、動滑車8のストローク量の2分の1、言い換えると、保持手段6のストローク量の4分の1に等しい。
【0030】
このようにして、ワーク3を工程S2側に向けて所定距離、ここでは第1エアシリンダ11の最大引き込みストロークの2倍の距離を移動させた後、続いて、短尺側のエアシリンダ(第2エアシリンダ)12を作動させてピストンを引き込む。これにより、このピストンと連結された同じく駆動側の動滑車9が、この動滑車9に巻き掛けられた索状体7を引張る向きに移動し、索状体7に固定された保持手段6およびこの保持手段6に挟持されたワーク3が、動滑車9のストロークの2倍の距離を工程S2に向けて移動する。なお、この際のウェイト14の移動量は、上記と同様、保持手段6のストローク量の4分の1に等しい。
【0031】
以上の動作を経て、図4に示すように、保持手段6がガイドレール51上をその工程S1側の端部から工程S2側の端部にまで移動し、これにより、保持手段6に保持されたワーク3が搬送レール2を介して工程S2中の所定位置に搬送される(図1を参照)。ここで、各エアシリンダ11,12による動滑車8,9の移動量の合計の2倍が保持手段6の総移動量に一致することから、保持手段6によるワーク3の搬送開始位置から搬送終了位置までの距離に合わせて各エアシリンダ11,12のストローク量が調整される。もちろん、図2に示すように、ガイドレール51の搬送先(工程S2)の側の端部にショックアブソーバ52を配設しておくことで、保持手段6(のアームプレート64)の位置を規制するようにしても構わない。
【0032】
このようにしてワーク3を工程S2中の所定位置まで搬送した後、まず爪部62,63を開くことでワーク3の拘束(挟持)状態を解除し、然る後、エアシリンダ11,12のピストンを図2に示す位置に復帰させる。この動作に伴い、従動側の動滑車10から索状体7の駆動側端部71に至る部分が、ウェイト14の自重により動滑車10の側に向けて引張られ、索状体7に固定された保持手段6が工程S2側から工程S1の側に向けて移動(後退)する。このようにして、ワーク3の搬送サイクルが完了する。なお、後退に際しても、搬送時と同様、ガイドレール51の搬送元(工程S1)の側の端部にショックアブソーバ52を配設しておいても構わない(図2を参照)。
【0033】
以上、本発明の一実施形態を説明したが、本発明に係るワーク搬送装置は、本発明の範囲内において任意に変更が可能である。
【0034】
例えば、図1に示す搬送態様では、工程S2中の所定位置がフリースペースである(別のワーク3が存在しない)ことが前提となるところ、作業効率の向上のためには、以下の搬送方法を採ることも可能である。例えば図2に示す構成のワーク搬送装置1を用いた場合、第1エアシリンダ11のピストンの引き込みにより動滑車8を装置内側に移動させていき、図5に示す中間位置まで移動させた段階で、第2エアシリンダ12を併せて駆動させる。これにより、2個の動滑車8,9が共に内側へ移動を開始するので、これら動滑車8,9の移動に伴う索状体7の引張り速度は単一エアシリンダ11による引張り時の2倍となる。そのため、保持手段6のスライド速度、ひいてはワーク3の搬送速度も2倍となる。このようにしてワーク3の搬送速度を搬送途中で変えることができれば、例えば図6に示すように、搬送先の工程S2中に別のワーク3が存在する場合でも、後続のワーク3で搬送先にある別のワーク3を押出すことができる(図6中2点鎖線で示す位置に)。
【0035】
あるいは、上記搬送態様は、後続のエアシリンダ12の引き込み速度を先行するエアシリンダ11のそれより大きくすることによっても達成することが可能である。すなわち、図示は省略するが、図3の如く、先に第1エアシリンダ11により対応する動滑車8を最大限内側まで移動させた状態から、相対的に引き込み速度の大きい第2エアシリンダ12で対応する動滑車9を移動させることで、既に工程S2中にある別のワーク3を押し出すことも可能である。
【0036】
なお、後続の搬送中のワーク3でもって搬送先の工程S2から先行するワーク3を押出し可能である限りにおいて、搬送速度の切替え時期(増大開始時期)は任意であり、例えば図6に示すように、前後のワーク3,3同士(この場合ホルダー4,4同士)が干渉した段階であってもよいし、この直前段階であってもよい。
【0037】
また、上記実施形態では、動滑車8,9に対応する駆動手段としてエアシリンダ11,12を例示したが、特にこの種の駆動手段に限定される必要はなく、例えば直動型のアクチュエータなど種々のアクチュエータを採用することができる。
【0038】
また、従動側の構成に関し、上記実施形態では、索状体7の従動側端部72を基部5に固定すると共に、途中に設けた従動用の動滑車10,10にウェイト14を懸架する形態を採っていたが、特にこの構成に限る必要はない。例えば図示は省略するが、従動側の端部72に直接ウェイト14を懸架することで、従動用の動滑車10を用いることなく、保持手段6の上記ストロークが可能となる。
【図面の簡単な説明】
【0039】
【図1】本発明の一実施形態に係るワーク搬送装置を組み込んだワーク加工ラインを概念的に示す平面図である。
【図2】ワーク搬送開始時におけるワーク搬送装置の正面図である。
【図3】ワーク搬送装置の使用態様の一例を示す正面図である。
【図4】ワーク搬送完了時におけるワーク搬送装置の正面図である。
【図5】ワーク搬送装置の使用態様の他の例を示す正面図である。
【図6】ワーク搬送態様の他の例を概念的に示すワーク加工ラインの平面図である。
【符号の説明】
【0040】
1 ワーク搬送装置
2 搬送レール
3 ワーク
5 基部
6 保持手段
7 索状体
8,9 動滑車(駆動用)
10 動滑車(従動用)
11,12 エアシリンダ
13 定滑車
14 ウェイト
62,63 爪部
S1 前工程
S2 次工程
【特許請求の範囲】
【請求項1】
隣接する工程間に配置され、該工程間でワークを搬送するワーク搬送装置において、
前記ワークを保持し、ガイド手段に沿って移動可能な保持手段と、
前記ガイド手段に沿って張設される張設部を有し、該張設部に前記保持手段が固定された索状体と、
前記索状体が巻き掛けられ、少なくとも1つの動滑車を含む複数の滑車と、
前記動滑車を移動させる駆動手段とを備え、
前記張設部の一方の側において、前記索状体は、その一端部が固定されると共に、該一端部から前記張設部に至る部分に前記動滑車が巻き掛けられ、
前記駆動手段により、前記索状体の前記一端部から前記張設部に至る部分が張る方向に前記動滑車を移動させることで、前記張設部に固定された前記保持手段を前記張設部の一方の側に移動させることを特徴とするワーク搬送装置。
【請求項2】
前記複数の滑車が複数の前記動滑車を含むと共に、前記動滑車にそれぞれ前記駆動手段が設けられており、前記張設部に固定された前記保持手段を前記張設部の一方の側に移動させる途中で、前記各々の駆動手段の作動と非作動とを切替えることで、前記保持手段の移動速度を変更可能とした請求項1に記載のワーク搬送装置。
【請求項3】
前記張設部の他方の側において、前記索状体は、前記張設部からその他端部に至る部分の長さがバランスウェイトによって可変調整され、前記駆動手段により、前記索状体の前記一端部から前記張設部に至る部分が緩む方向に前記動滑車を移動させることで、前記張設部に固定された前記保持手段を前記張設部の他方の側に移動させる請求項1又は2に記載のワーク搬送装置。
【請求項1】
隣接する工程間に配置され、該工程間でワークを搬送するワーク搬送装置において、
前記ワークを保持し、ガイド手段に沿って移動可能な保持手段と、
前記ガイド手段に沿って張設される張設部を有し、該張設部に前記保持手段が固定された索状体と、
前記索状体が巻き掛けられ、少なくとも1つの動滑車を含む複数の滑車と、
前記動滑車を移動させる駆動手段とを備え、
前記張設部の一方の側において、前記索状体は、その一端部が固定されると共に、該一端部から前記張設部に至る部分に前記動滑車が巻き掛けられ、
前記駆動手段により、前記索状体の前記一端部から前記張設部に至る部分が張る方向に前記動滑車を移動させることで、前記張設部に固定された前記保持手段を前記張設部の一方の側に移動させることを特徴とするワーク搬送装置。
【請求項2】
前記複数の滑車が複数の前記動滑車を含むと共に、前記動滑車にそれぞれ前記駆動手段が設けられており、前記張設部に固定された前記保持手段を前記張設部の一方の側に移動させる途中で、前記各々の駆動手段の作動と非作動とを切替えることで、前記保持手段の移動速度を変更可能とした請求項1に記載のワーク搬送装置。
【請求項3】
前記張設部の他方の側において、前記索状体は、前記張設部からその他端部に至る部分の長さがバランスウェイトによって可変調整され、前記駆動手段により、前記索状体の前記一端部から前記張設部に至る部分が緩む方向に前記動滑車を移動させることで、前記張設部に固定された前記保持手段を前記張設部の他方の側に移動させる請求項1又は2に記載のワーク搬送装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−202991(P2009−202991A)
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願番号】特願2008−46091(P2008−46091)
【出願日】平成20年2月27日(2008.2.27)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願日】平成20年2月27日(2008.2.27)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]