
ワーク搬送装置
【課題】天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置を提供する。
【解決手段】横走行ユニット111は、基礎レール106に載置される第1ローラ116と、可動レール112bと、自走部401とを有する。可動レール112bは、Y方向に延びる。自走部401は、横走行ユニット111をX方向に自走させる。縦走行ユニット121は、可動レール112bに載置される第2ローラ125と、ワークを把持する把持部201と、を有する。横走行ユニット111は、縦走行駆動ユニット301も備える。縦走行駆動ユニット301は、縦走行ユニット121をY方向に搬送する。
【解決手段】横走行ユニット111は、基礎レール106に載置される第1ローラ116と、可動レール112bと、自走部401とを有する。可動レール112bは、Y方向に延びる。自走部401は、横走行ユニット111をX方向に自走させる。縦走行ユニット121は、可動レール112bに載置される第2ローラ125と、ワークを把持する把持部201と、を有する。横走行ユニット111は、縦走行駆動ユニット301も備える。縦走行駆動ユニット301は、縦走行ユニット121をY方向に搬送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワーク搬送装置に関する。
【背景技術】
【0002】
自動車のボデーを製造する工場では、ボデーを構成するための種々のワークが搬送され、このワークに加工が施され、ボデーが製造される。ワークを搬送するための装置の一例には、特許文献1に記載の被搬送物吊下装置付き搬送装置がある。
【0003】
特許文献1に記載の被搬送物吊下装置付き搬送装置では、被搬送物Wを搬送する搬送用電車の車輪を駆動するモータと、搬送用電車から吊り下がる吊下昇降駆動手段の吊下具を巻き取ったり繰り出したりするための回転体を駆動するモータとが、略同一レベル(略同一高さ)で搬送用電車の走行方向の前後に併設されている。特許文献1によれば、装置全体の高さが小さくなり、天井の低い建屋内でも容易に搬送ラインを構成することが出来る、とされる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−116885号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の被搬送物吊下装置付き搬送装置では、ワークが、ガイドレールに沿う方向にのみ搬送される。しかしながら、工場では、ガイドレールに交差する方向にもワークを搬送したいという要請がある。この点、特許文献1には、ガイドレールに交差する方向にワークを搬送するための機構や駆動源を搭載するという技術的思想は開示されていない。
【0006】
本発明は、上記の点を鑑みてなされたものであり、天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のワーク搬送装置は、(a)鉛直方向に交差する第1方向に延びる基礎レールと、(b)前記基礎レールに載置される第1ローラと、鉛直方向と前記第1方向とのいずれにも交差する第2方向に延びる可動レールと、第1駆動源を含み前記第1駆動源の駆動力により前記第1方向に自走するための自走部とを有する第1走行ユニットと、(c)ワークを把持する把持部と、前記可動レールに載置される第2ローラとを有する第2走行ユニットと、を備え、前記第1走行ユニットは、第2駆動源を含み前記第2駆動源の駆動力により前記第2走行ユニットを前記第2方向に搬送する搬送部を更に備える。
【発明の効果】
【0008】
本発明によれば、第1走行ユニットと第2走行ユニットとはそれぞれ異なる駆動源により鉛直方向に交差する別個独立の方向に動く。したがって、天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置が実現される。
【図面の簡単な説明】
【0009】
【図1】ワーク搬送装置の平面図である。
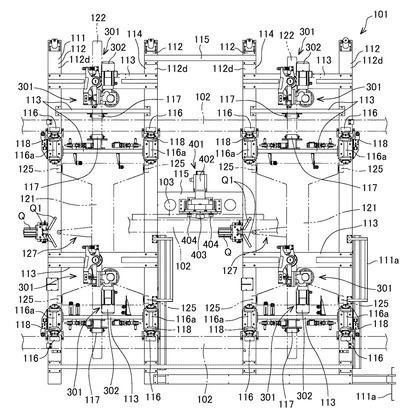
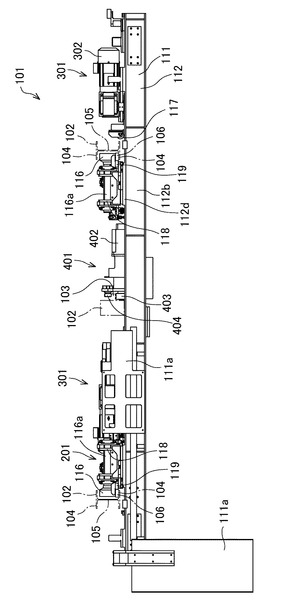
【図2】ワーク搬送装置の右側面図である。
【図3】縦走行ユニットの平面図である。
【図4】縦走行ユニットの正面図である。
【図5】縦走行ユニットの左側面図である。
【図6】縦走行駆動ユニットの平面図である。
【図7】縦走行駆動ユニットの左側面図である。
【図8】縦走行駆動ユニットの正面図である。
【図9】自走部の左側面図である。
【図10】自走部の正面図である。
【発明を実施するための形態】
【0010】
実施の一形態を、図1ないし図10に基づいて説明する。
【0011】
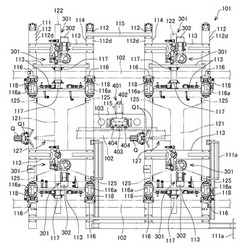
図1は、ワーク搬送装置101の平面図である。図2は、ワーク搬送装置101の右側面図である。図1では、梁102は一点鎖線で模式的に示され、縦走行ユニット121は二点鎖線で模式的に示されている。図2では、縦走行ユニット121は省略されている。ワーク搬送装置101は、自動車のボデーを製造する工場の天井梁や工場に組まれた櫓(やぐら)に設けられ、ボデーを構成する種々のワークを搬送するために用いられるものである。ワーク搬送装置101は、複数本の梁102を有する。梁102は、略水平に向けられ、互いに平行に延びており、工場に対して固定されている。梁102が延びる方向は、特許請求の範囲でいうところの「第1方向」に相当するもので、以下の説明において「X方向」と呼ぶことがある。
【0012】
梁102には、その側面に、ラックギア103が取り付けられているものがある。このラックギア103は、X方向に延びている。ラックギア103には、ピニオンギア403が噛み合う。ラックギア103とピニオンギア403との関係性は、後述する。
【0013】
梁102には、上下一対のフランジ部104を水平方向に向け、かつ、ウェブ部105を鉛直方向に向けて配置されるH鋼のものがある。下方のフランジ部104の上面には、焼入された鋼材で作られた基礎レール106が配置される。基礎レール106は、X方向に延びている。
【0014】
ワーク搬送装置101は、第1走行ユニットとしての横走行ユニット111を有する。横走行ユニット111は、図2に示すように、梁102に対し水平方向に並ぶ高さ位置から梁102よりも下方にかけた位置に配置される。横走行ユニット111は、梁102に直交して略水平に延びる四本の可動梁112を有する。この可動梁112が延びる方向は、特許請求の範囲でいうところの「第2方向」に相当するもので、以下の説明において「Y方向」と呼ぶことがある。四本の可動梁112は、互いに平行になるように離間してX方向に並べられる。隣り合う可動梁112同士は、X方向に延びる第1連結材113により連結され、一の横走行サブユニット114を形成する。つまり、横走行ユニット111は、二つの横走行サブユニット114を有することになる。横走行サブユニット114は、平面視において梯子状に見える。二つの横走行サブユニット114は、X方向に並んでいて、X方向に延びる第2連結材115により連結される。第2連結材115のうち横走行ユニット111の略中央に位置するものは、他の第2連結材115に対して幅広になっていて、その上面に自走部401(詳細は、図9及び図10に基づいて後述)が取り付けられている。自走部401は、横走行ユニット111をX方向に自走させる。また、横走行ユニット111には、ガイドプレート111aが取付けられている。このガイドプレート111aは、図1では右下に示され、図2では左側に示されている。ガイドプレート111aは、横走行ユニット111に搭載された第1モータ402や第2モータ302に給電をするためのケーブル(図示せず)を下方にある電力供給源(図示せず)に導くためのものであり、横走行ユニット111から下方に延びている。
【0015】
ワーク搬送装置101は、第2走行ユニットとしての縦走行ユニット121を有する。縦走行ユニット121は、横走行サブユニット114のそれぞれに対応させて設けられる。縦走行ユニット121は、走行用バー122を有する。走行用バー122は、横走行サブユニット114を構成する一対の可動梁112の間に位置してY方向に延びている。そして、走行用バー122は、第1連結材113に取り付けられた駆動部としての縦走行駆動ユニット301(詳細は、図6〜図8に基づいて後述)によってY方向に動かされる。縦走行ユニット121には、把持部201(図3〜図5参照)が設けられている。把持部201は、ワークを把持したり、把持したワークを解放したりする。
【0016】
上記のように、ワーク搬送装置101では、自走部401によって横走行ユニット111がX方向に動き、縦走行駆動ユニット301によって縦走行ユニット121がY方向に動く。これにより、把持部201を水平面の方向にワークを搬送することができるようになる。搬送されたワークには、加工が施され、自動車のボデーとなる。以下、ワーク搬送装置101を構成する各部の詳細について述べる。
【0017】
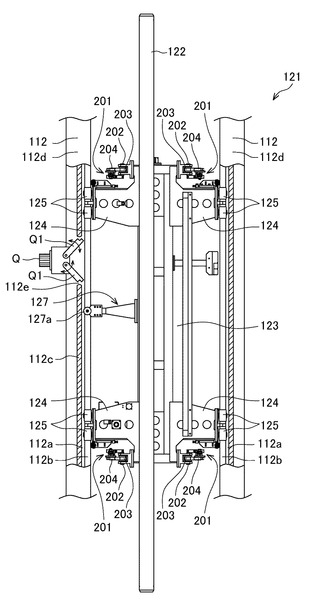
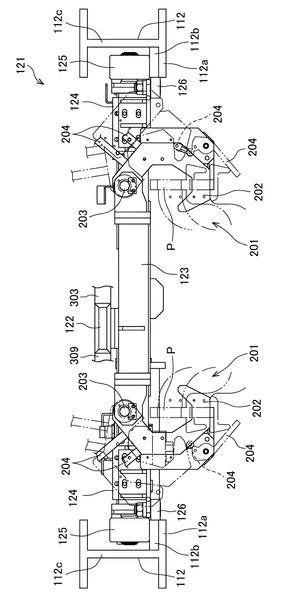
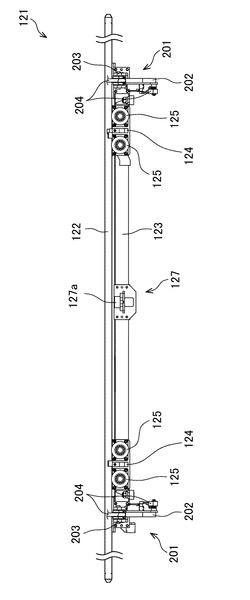
図3は、縦走行ユニット121の平面図である。図4は、縦走行ユニット121の正面図である。図5は、縦走行ユニット121の左側面図である。図5では、可動梁112と縦走行駆動ユニット301とは省略されている。縦走行ユニット121は、走行用バー122と、基部123と、翼部124と、第2ローラ125と、第2サイドローラ126とを備える。基部123は、Y方向に延びる長尺の平板状をなしている。走行用バー122は、基部123の上面に取付けられる。翼部124は、基部123のY方向の両端部のそれぞれから、X方向の両側に広がる。第2ローラ125及び第2サイドローラ126は、翼部124の先端部に取付けられる。第2ローラ125は、可動梁112の下方フランジ部112aの上面に配置される。第2ローラ125は、Y方向に延びる可動レール112bに載置され、この可動レール112bの上面を転がる。可動レール112bは、焼入された鋼材で作られた断面矩形状の長尺をなす。この可動レール112bにおける縦走行ユニット121の内側を向く側面には、第2サイドローラ126が接する。第2ローラ125も第2サイドローラ126も、翼部124に取付けられ、回動自在となっている。第2サイドローラは、縦走行ユニット121がX方向に揺れ動くことを防ぐ。
【0018】
縦走行ユニット121において翼部124よりもさらにY方向に外側の箇所には、把持部201が設けられる。把持部201は、フック部202と、このフック部202を翼部124に回動自在に取り付けるための回動軸部203と、ワイヤやスプリングを有し回動軸部203を中心にフック部202を回動させる作動部204とを有する。作動部204によりフック部202は回動軸部203を中心に回動し、ワークを吊るしたハンガーPを掬い上げたり解放したりする。
【0019】
縦走行ユニット121は、位置決めボス部127も有する。位置決めボス部127は、基部123におけるY方向の略中央からX方向に延びる。位置決めボス部127の先端部には、ローラ127aが設けられる。ローラ127aは、可動梁112のウェブ部112cに対面し、縦走行ユニット121がY方向に移動するときにウェブ部112cに沿うように移動する。このとき、ローラ127aは、ウェブ部112cに接触しない。
【0020】
ところで、可動梁112のウェブ部112cには、Y方向に長い孔部112eが開口している。そして、可動梁112の下方フランジ部112aには、この孔部112eに対面するように、位置決めシリンダ部Qが取付けられる(図1も参照)。位置決めシリンダ部Qからは、図3に示すようにカニ挟み状に広がって延びる二本の位置決めアーム部Q1が延びる。二本の位置決めアーム部Q1は、いずれも、孔部112eから突出し、Y方向に移動する位置決めボス部127のローラ127aに接触されるようになっている。そして、縦走行ユニット121がY方向に移動すると、位置決めボス部127のローラ127aは、一方の位置決めアーム部Q1の先端に接触し、この一方の位置決めアーム部Q1を押しのけて乗り越え、二本の位置決めアーム部Q1の間に入り込む。縦走行ユニット121が動いていない状態では、位置決めアーム部Q1には弾性体(図示せず)が取付けられていて位置決めシリンダ部Qに対して回動するように揺れ動き(図3参照)、ローラ127aを挟みこんで二つの位置決めアーム部Q1の間に導いて縦走行ユニット121の位置を維持させる。縦走行ユニット121が再び走行すると、位置決めボス部127のローラ127aは、位置決めアーム部Q1の押し戻し力に抗ってこの位置決めアーム部Q1を乗り越える。このような位置決めシリンダ部Qや孔部112eは、予め、縦走行ユニット121を停止させたい位置に設けられる。
【0021】
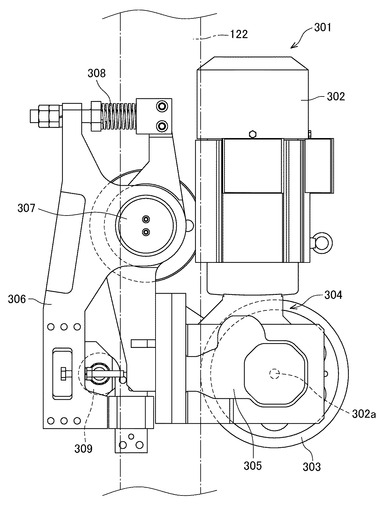
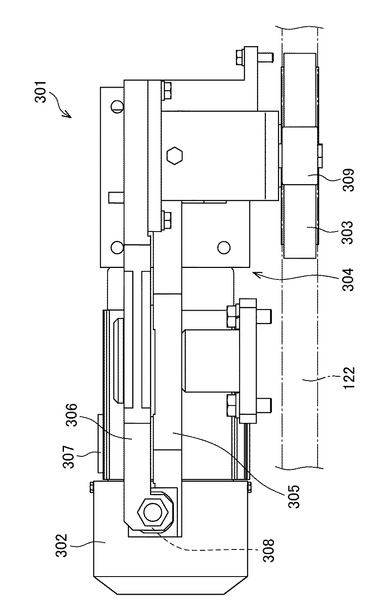
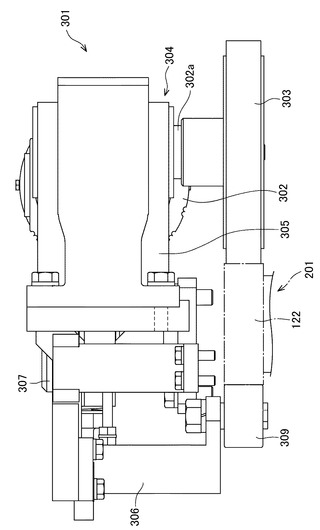
図6は、縦走行駆動ユニット301の平面図である。図7は、縦走行駆動ユニット301の左側面図である。図8は、縦走行駆動ユニット301の正面図である。図6〜8では、走行用バー122を一点鎖線で示している。縦走行駆動ユニット301は、第1連結材113(図1参照)に取付けられる。縦走行駆動ユニット301は、第2駆動源としての第2モータ302と、大径ローラ303と、動力伝達部304と、第1アーム305と、第2アーム306と、取付軸部307と、スプリング308と、小径ローラ309とを有する。
【0022】
大径ローラ303は、第1アーム305の先端部に取付けられる。小径ローラ309は、第2アーム306の先端部に取付けられる。第1アーム305と第2アーム306とは、取付軸部307を中心に回動自在に連結されている。スプリング308は、第1アーム305と第2アーム306とを連結し、大径ローラ303と小径ローラ309とを近づけるように第1アーム305及び第2アーム306を動かす。大径ローラ303と小径ローラ309とは、走行用バー122をX方向に挟み込む。
【0023】
第2モータ302は、正逆どちらにも駆動できるものである。第2モータ302の駆動軸302は、Z(高さ)方向に延びている。第2モータ302の駆動力は、第2モータ302の駆動軸から出力され、動力伝達部304を介して、鉛直方向に延びるウレタン製の大径ローラ303の回転軸に伝わる。これにより、大径ローラ303は、回動して、走行用バー122をY方向に送り出す。小径ローラ309は、走行用バー122の移動に伴って回動し、大径ローラ303とともに走行用バー122のX方向への揺れ動きを防ぐ。
【0024】
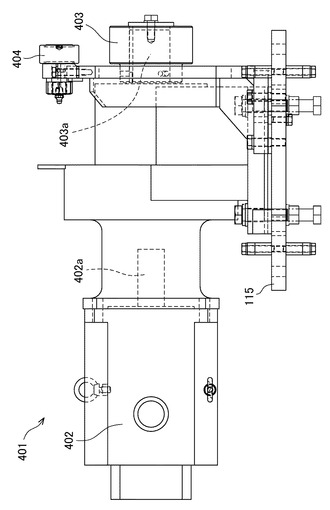
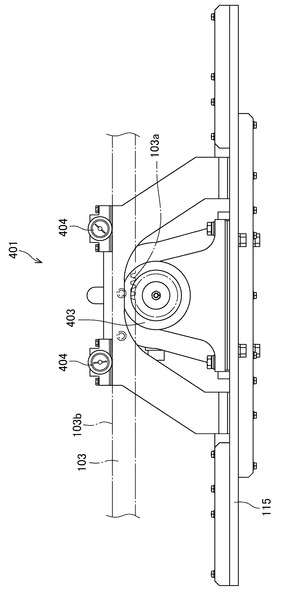
図9は、自走部401の左側面図である。図10は、自走部401の正面図である。なお、図10では、梁102は省略されている。図1、図2、図9及び図10を参照し、横走行ユニット111と自走部401とについて説明する。横走行ユニット111は、前述した可動梁112、第1連結材113、第2連結材115、自走部401の他に、第1ローラ116とガイドローラ117と第1サイドローラ119とを備える。第1ローラ116からY方向に延びる回転軸116aは、可動梁112の上方フランジ部112dの上面に配置される軸受部118に回転自在に支持される。第1ローラ116は、基礎レール106に載置され、この基礎レール106の上面を転がる。この基礎レール106における横走行ユニット111の内側を向く側面には、第1サイドローラ119が接する。この第1サイドローラ119は、軸受部118に取付けられ、回動自在となっている。第1サイドローラ119は、横走行ユニット111がY方向に揺れ動くことを防ぐ。
【0025】
ガイドローラ117は、第1連結材113の中腹に設けられ、縦走行駆動ユニット301に挟み込まれる走行用バー122の上下面を挟みこみ、走行中に上下に振動する走行用バー122が第1連結材113と高さ方向で干渉しないよう押さえこむ。
【0026】
自走部401は、第1駆動源としての第1モータ402と、ピニオンギア403と、カムフォロワ404とを有する。第1モータ402は、正逆どちらにも駆動できるものである。第1モータ402は、第2連結材115の上面側に取付けられる。第1モータ402は、第2モータ302と略同じ高さに配置されていて、正面視や側面視において第1モータ402と第2モータ302とは横並びするように見える。第1モータ402の駆動軸402aは、Y方向に延びている。この駆動軸402aの延長線上にはピニオンギア403の中心軸403aが配置され、ピニオンギア403は第1モータ402の駆動により回転する。
【0027】
図10に示すように、ラックギア103は、ギア部103aを下方に向けた状態で、X方向に延びている。ピニオンギア403は、ラックギア103のギア部103aと噛み合う。カムフォロワ404は、ラックギア103におけるギア部103aとは反対側の面103bに接する。カムフォロワ404は、自走部401での第1モータ402の加速時又は減速時にピニオンギア403から離れようとするラックギア103を押さえこみ、横走行ユニット111の走行を安定させるものである。
【0028】
本実施の形態のワーク搬送装置101によれば、横走行ユニット111(第1走行ユニット)と縦走行駆動ユニット301(第2走行ユニット)とはそれぞれ異なる駆動源により鉛直方向に交差する別個独立の方向に動く。したがって、鉛直方向に交差する面の方向にワークを搬送することができる。しかも、天井の低い建屋にも対応できる。
【符号の説明】
【0029】
101 ワーク搬送装置
103 ラックギア
111 横走行ユニット(第1走行ユニット)
112b 可動レール
116 第1ローラ
121 縦走行ユニット(第2走行ユニット)
122 走行用バー
125 第2ローラ
201 把持部
301 縦走行駆動ユニット(搬送部)
302 第2モータ(第2駆動源)
401 自走部
402 第1モータ(第1駆動源)
403 ピニオンギア
【技術分野】
【0001】
本発明は、ワーク搬送装置に関する。
【背景技術】
【0002】
自動車のボデーを製造する工場では、ボデーを構成するための種々のワークが搬送され、このワークに加工が施され、ボデーが製造される。ワークを搬送するための装置の一例には、特許文献1に記載の被搬送物吊下装置付き搬送装置がある。
【0003】
特許文献1に記載の被搬送物吊下装置付き搬送装置では、被搬送物Wを搬送する搬送用電車の車輪を駆動するモータと、搬送用電車から吊り下がる吊下昇降駆動手段の吊下具を巻き取ったり繰り出したりするための回転体を駆動するモータとが、略同一レベル(略同一高さ)で搬送用電車の走行方向の前後に併設されている。特許文献1によれば、装置全体の高さが小さくなり、天井の低い建屋内でも容易に搬送ラインを構成することが出来る、とされる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平5−116885号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の被搬送物吊下装置付き搬送装置では、ワークが、ガイドレールに沿う方向にのみ搬送される。しかしながら、工場では、ガイドレールに交差する方向にもワークを搬送したいという要請がある。この点、特許文献1には、ガイドレールに交差する方向にワークを搬送するための機構や駆動源を搭載するという技術的思想は開示されていない。
【0006】
本発明は、上記の点を鑑みてなされたものであり、天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のワーク搬送装置は、(a)鉛直方向に交差する第1方向に延びる基礎レールと、(b)前記基礎レールに載置される第1ローラと、鉛直方向と前記第1方向とのいずれにも交差する第2方向に延びる可動レールと、第1駆動源を含み前記第1駆動源の駆動力により前記第1方向に自走するための自走部とを有する第1走行ユニットと、(c)ワークを把持する把持部と、前記可動レールに載置される第2ローラとを有する第2走行ユニットと、を備え、前記第1走行ユニットは、第2駆動源を含み前記第2駆動源の駆動力により前記第2走行ユニットを前記第2方向に搬送する搬送部を更に備える。
【発明の効果】
【0008】
本発明によれば、第1走行ユニットと第2走行ユニットとはそれぞれ異なる駆動源により鉛直方向に交差する別個独立の方向に動く。したがって、天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置が実現される。
【図面の簡単な説明】
【0009】
【図1】ワーク搬送装置の平面図である。
【図2】ワーク搬送装置の右側面図である。
【図3】縦走行ユニットの平面図である。
【図4】縦走行ユニットの正面図である。
【図5】縦走行ユニットの左側面図である。
【図6】縦走行駆動ユニットの平面図である。
【図7】縦走行駆動ユニットの左側面図である。
【図8】縦走行駆動ユニットの正面図である。
【図9】自走部の左側面図である。
【図10】自走部の正面図である。
【発明を実施するための形態】
【0010】
実施の一形態を、図1ないし図10に基づいて説明する。
【0011】
図1は、ワーク搬送装置101の平面図である。図2は、ワーク搬送装置101の右側面図である。図1では、梁102は一点鎖線で模式的に示され、縦走行ユニット121は二点鎖線で模式的に示されている。図2では、縦走行ユニット121は省略されている。ワーク搬送装置101は、自動車のボデーを製造する工場の天井梁や工場に組まれた櫓(やぐら)に設けられ、ボデーを構成する種々のワークを搬送するために用いられるものである。ワーク搬送装置101は、複数本の梁102を有する。梁102は、略水平に向けられ、互いに平行に延びており、工場に対して固定されている。梁102が延びる方向は、特許請求の範囲でいうところの「第1方向」に相当するもので、以下の説明において「X方向」と呼ぶことがある。
【0012】
梁102には、その側面に、ラックギア103が取り付けられているものがある。このラックギア103は、X方向に延びている。ラックギア103には、ピニオンギア403が噛み合う。ラックギア103とピニオンギア403との関係性は、後述する。
【0013】
梁102には、上下一対のフランジ部104を水平方向に向け、かつ、ウェブ部105を鉛直方向に向けて配置されるH鋼のものがある。下方のフランジ部104の上面には、焼入された鋼材で作られた基礎レール106が配置される。基礎レール106は、X方向に延びている。
【0014】
ワーク搬送装置101は、第1走行ユニットとしての横走行ユニット111を有する。横走行ユニット111は、図2に示すように、梁102に対し水平方向に並ぶ高さ位置から梁102よりも下方にかけた位置に配置される。横走行ユニット111は、梁102に直交して略水平に延びる四本の可動梁112を有する。この可動梁112が延びる方向は、特許請求の範囲でいうところの「第2方向」に相当するもので、以下の説明において「Y方向」と呼ぶことがある。四本の可動梁112は、互いに平行になるように離間してX方向に並べられる。隣り合う可動梁112同士は、X方向に延びる第1連結材113により連結され、一の横走行サブユニット114を形成する。つまり、横走行ユニット111は、二つの横走行サブユニット114を有することになる。横走行サブユニット114は、平面視において梯子状に見える。二つの横走行サブユニット114は、X方向に並んでいて、X方向に延びる第2連結材115により連結される。第2連結材115のうち横走行ユニット111の略中央に位置するものは、他の第2連結材115に対して幅広になっていて、その上面に自走部401(詳細は、図9及び図10に基づいて後述)が取り付けられている。自走部401は、横走行ユニット111をX方向に自走させる。また、横走行ユニット111には、ガイドプレート111aが取付けられている。このガイドプレート111aは、図1では右下に示され、図2では左側に示されている。ガイドプレート111aは、横走行ユニット111に搭載された第1モータ402や第2モータ302に給電をするためのケーブル(図示せず)を下方にある電力供給源(図示せず)に導くためのものであり、横走行ユニット111から下方に延びている。
【0015】
ワーク搬送装置101は、第2走行ユニットとしての縦走行ユニット121を有する。縦走行ユニット121は、横走行サブユニット114のそれぞれに対応させて設けられる。縦走行ユニット121は、走行用バー122を有する。走行用バー122は、横走行サブユニット114を構成する一対の可動梁112の間に位置してY方向に延びている。そして、走行用バー122は、第1連結材113に取り付けられた駆動部としての縦走行駆動ユニット301(詳細は、図6〜図8に基づいて後述)によってY方向に動かされる。縦走行ユニット121には、把持部201(図3〜図5参照)が設けられている。把持部201は、ワークを把持したり、把持したワークを解放したりする。
【0016】
上記のように、ワーク搬送装置101では、自走部401によって横走行ユニット111がX方向に動き、縦走行駆動ユニット301によって縦走行ユニット121がY方向に動く。これにより、把持部201を水平面の方向にワークを搬送することができるようになる。搬送されたワークには、加工が施され、自動車のボデーとなる。以下、ワーク搬送装置101を構成する各部の詳細について述べる。
【0017】
図3は、縦走行ユニット121の平面図である。図4は、縦走行ユニット121の正面図である。図5は、縦走行ユニット121の左側面図である。図5では、可動梁112と縦走行駆動ユニット301とは省略されている。縦走行ユニット121は、走行用バー122と、基部123と、翼部124と、第2ローラ125と、第2サイドローラ126とを備える。基部123は、Y方向に延びる長尺の平板状をなしている。走行用バー122は、基部123の上面に取付けられる。翼部124は、基部123のY方向の両端部のそれぞれから、X方向の両側に広がる。第2ローラ125及び第2サイドローラ126は、翼部124の先端部に取付けられる。第2ローラ125は、可動梁112の下方フランジ部112aの上面に配置される。第2ローラ125は、Y方向に延びる可動レール112bに載置され、この可動レール112bの上面を転がる。可動レール112bは、焼入された鋼材で作られた断面矩形状の長尺をなす。この可動レール112bにおける縦走行ユニット121の内側を向く側面には、第2サイドローラ126が接する。第2ローラ125も第2サイドローラ126も、翼部124に取付けられ、回動自在となっている。第2サイドローラは、縦走行ユニット121がX方向に揺れ動くことを防ぐ。
【0018】
縦走行ユニット121において翼部124よりもさらにY方向に外側の箇所には、把持部201が設けられる。把持部201は、フック部202と、このフック部202を翼部124に回動自在に取り付けるための回動軸部203と、ワイヤやスプリングを有し回動軸部203を中心にフック部202を回動させる作動部204とを有する。作動部204によりフック部202は回動軸部203を中心に回動し、ワークを吊るしたハンガーPを掬い上げたり解放したりする。
【0019】
縦走行ユニット121は、位置決めボス部127も有する。位置決めボス部127は、基部123におけるY方向の略中央からX方向に延びる。位置決めボス部127の先端部には、ローラ127aが設けられる。ローラ127aは、可動梁112のウェブ部112cに対面し、縦走行ユニット121がY方向に移動するときにウェブ部112cに沿うように移動する。このとき、ローラ127aは、ウェブ部112cに接触しない。
【0020】
ところで、可動梁112のウェブ部112cには、Y方向に長い孔部112eが開口している。そして、可動梁112の下方フランジ部112aには、この孔部112eに対面するように、位置決めシリンダ部Qが取付けられる(図1も参照)。位置決めシリンダ部Qからは、図3に示すようにカニ挟み状に広がって延びる二本の位置決めアーム部Q1が延びる。二本の位置決めアーム部Q1は、いずれも、孔部112eから突出し、Y方向に移動する位置決めボス部127のローラ127aに接触されるようになっている。そして、縦走行ユニット121がY方向に移動すると、位置決めボス部127のローラ127aは、一方の位置決めアーム部Q1の先端に接触し、この一方の位置決めアーム部Q1を押しのけて乗り越え、二本の位置決めアーム部Q1の間に入り込む。縦走行ユニット121が動いていない状態では、位置決めアーム部Q1には弾性体(図示せず)が取付けられていて位置決めシリンダ部Qに対して回動するように揺れ動き(図3参照)、ローラ127aを挟みこんで二つの位置決めアーム部Q1の間に導いて縦走行ユニット121の位置を維持させる。縦走行ユニット121が再び走行すると、位置決めボス部127のローラ127aは、位置決めアーム部Q1の押し戻し力に抗ってこの位置決めアーム部Q1を乗り越える。このような位置決めシリンダ部Qや孔部112eは、予め、縦走行ユニット121を停止させたい位置に設けられる。
【0021】
図6は、縦走行駆動ユニット301の平面図である。図7は、縦走行駆動ユニット301の左側面図である。図8は、縦走行駆動ユニット301の正面図である。図6〜8では、走行用バー122を一点鎖線で示している。縦走行駆動ユニット301は、第1連結材113(図1参照)に取付けられる。縦走行駆動ユニット301は、第2駆動源としての第2モータ302と、大径ローラ303と、動力伝達部304と、第1アーム305と、第2アーム306と、取付軸部307と、スプリング308と、小径ローラ309とを有する。
【0022】
大径ローラ303は、第1アーム305の先端部に取付けられる。小径ローラ309は、第2アーム306の先端部に取付けられる。第1アーム305と第2アーム306とは、取付軸部307を中心に回動自在に連結されている。スプリング308は、第1アーム305と第2アーム306とを連結し、大径ローラ303と小径ローラ309とを近づけるように第1アーム305及び第2アーム306を動かす。大径ローラ303と小径ローラ309とは、走行用バー122をX方向に挟み込む。
【0023】
第2モータ302は、正逆どちらにも駆動できるものである。第2モータ302の駆動軸302は、Z(高さ)方向に延びている。第2モータ302の駆動力は、第2モータ302の駆動軸から出力され、動力伝達部304を介して、鉛直方向に延びるウレタン製の大径ローラ303の回転軸に伝わる。これにより、大径ローラ303は、回動して、走行用バー122をY方向に送り出す。小径ローラ309は、走行用バー122の移動に伴って回動し、大径ローラ303とともに走行用バー122のX方向への揺れ動きを防ぐ。
【0024】
図9は、自走部401の左側面図である。図10は、自走部401の正面図である。なお、図10では、梁102は省略されている。図1、図2、図9及び図10を参照し、横走行ユニット111と自走部401とについて説明する。横走行ユニット111は、前述した可動梁112、第1連結材113、第2連結材115、自走部401の他に、第1ローラ116とガイドローラ117と第1サイドローラ119とを備える。第1ローラ116からY方向に延びる回転軸116aは、可動梁112の上方フランジ部112dの上面に配置される軸受部118に回転自在に支持される。第1ローラ116は、基礎レール106に載置され、この基礎レール106の上面を転がる。この基礎レール106における横走行ユニット111の内側を向く側面には、第1サイドローラ119が接する。この第1サイドローラ119は、軸受部118に取付けられ、回動自在となっている。第1サイドローラ119は、横走行ユニット111がY方向に揺れ動くことを防ぐ。
【0025】
ガイドローラ117は、第1連結材113の中腹に設けられ、縦走行駆動ユニット301に挟み込まれる走行用バー122の上下面を挟みこみ、走行中に上下に振動する走行用バー122が第1連結材113と高さ方向で干渉しないよう押さえこむ。
【0026】
自走部401は、第1駆動源としての第1モータ402と、ピニオンギア403と、カムフォロワ404とを有する。第1モータ402は、正逆どちらにも駆動できるものである。第1モータ402は、第2連結材115の上面側に取付けられる。第1モータ402は、第2モータ302と略同じ高さに配置されていて、正面視や側面視において第1モータ402と第2モータ302とは横並びするように見える。第1モータ402の駆動軸402aは、Y方向に延びている。この駆動軸402aの延長線上にはピニオンギア403の中心軸403aが配置され、ピニオンギア403は第1モータ402の駆動により回転する。
【0027】
図10に示すように、ラックギア103は、ギア部103aを下方に向けた状態で、X方向に延びている。ピニオンギア403は、ラックギア103のギア部103aと噛み合う。カムフォロワ404は、ラックギア103におけるギア部103aとは反対側の面103bに接する。カムフォロワ404は、自走部401での第1モータ402の加速時又は減速時にピニオンギア403から離れようとするラックギア103を押さえこみ、横走行ユニット111の走行を安定させるものである。
【0028】
本実施の形態のワーク搬送装置101によれば、横走行ユニット111(第1走行ユニット)と縦走行駆動ユニット301(第2走行ユニット)とはそれぞれ異なる駆動源により鉛直方向に交差する別個独立の方向に動く。したがって、鉛直方向に交差する面の方向にワークを搬送することができる。しかも、天井の低い建屋にも対応できる。
【符号の説明】
【0029】
101 ワーク搬送装置
103 ラックギア
111 横走行ユニット(第1走行ユニット)
112b 可動レール
116 第1ローラ
121 縦走行ユニット(第2走行ユニット)
122 走行用バー
125 第2ローラ
201 把持部
301 縦走行駆動ユニット(搬送部)
302 第2モータ(第2駆動源)
401 自走部
402 第1モータ(第1駆動源)
403 ピニオンギア
【特許請求の範囲】
【請求項1】
鉛直方向に交差する第1方向に延びる基礎レールと、
前記基礎レールに載置される第1ローラと、鉛直方向と前記第1方向とのいずれにも交差する第2方向に延びる可動レールと、第1駆動源を含み前記第1駆動源の駆動力により前記第1方向に自走するための自走部とを有する第1走行ユニットと、
ワークを把持する把持部と、前記可動レールに載置される第2ローラとを有する第2走行ユニットと、
を備え、
前記第1走行ユニットは、第2駆動源を含み前記第2駆動源の駆動力により前記第2走行ユニットを前記第2方向に搬送する搬送部を更に備える、
ワーク搬送装置。
【請求項2】
前記第1駆動源と前記第2駆動源とは、略同じ高さに配置される、
請求項1記載のワーク搬送装置。
【請求項3】
前記第2走行ユニットは、前記第2方向に延びる走行用バーを有し、
前記搬送部は、前記走行用バーの側部を挟み込み、前記第2駆動源の駆動によって前記第2方向に送り出す、
請求項1又は2記載のワーク搬送装置。
【請求項4】
前記第1方向に延びるラックギアを更に備え、
前記自走部は、前記第1駆動源の駆動により回転するピニオンギアを含む、
請求項1から3のいずれか一に記載のワーク搬送装置。
【請求項1】
鉛直方向に交差する第1方向に延びる基礎レールと、
前記基礎レールに載置される第1ローラと、鉛直方向と前記第1方向とのいずれにも交差する第2方向に延びる可動レールと、第1駆動源を含み前記第1駆動源の駆動力により前記第1方向に自走するための自走部とを有する第1走行ユニットと、
ワークを把持する把持部と、前記可動レールに載置される第2ローラとを有する第2走行ユニットと、
を備え、
前記第1走行ユニットは、第2駆動源を含み前記第2駆動源の駆動力により前記第2走行ユニットを前記第2方向に搬送する搬送部を更に備える、
ワーク搬送装置。
【請求項2】
前記第1駆動源と前記第2駆動源とは、略同じ高さに配置される、
請求項1記載のワーク搬送装置。
【請求項3】
前記第2走行ユニットは、前記第2方向に延びる走行用バーを有し、
前記搬送部は、前記走行用バーの側部を挟み込み、前記第2駆動源の駆動によって前記第2方向に送り出す、
請求項1又は2記載のワーク搬送装置。
【請求項4】
前記第1方向に延びるラックギアを更に備え、
前記自走部は、前記第1駆動源の駆動により回転するピニオンギアを含む、
請求項1から3のいずれか一に記載のワーク搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−188223(P2012−188223A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−52966(P2011−52966)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000108188)セントラル自動車株式会社 (66)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000108188)セントラル自動車株式会社 (66)
[ Back to top ]