
ワーク搬送装置
【課題】構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供する。
【解決手段】本ワーク搬送装置1は、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、搬送ライン2からのワークW1、W2が載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。
【解決手段】本ワーク搬送装置1は、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、搬送ライン2からのワークW1、W2が載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワーク搬送装置に関し、詳しくは、搬送ラインを搬送される複数種類のワークの順序を変更するワーク搬送装置に関するものである。
【背景技術】
【0002】
一般に、ワークの順序を変更するワーク搬送装置は、一時的に搬送ラインの本線から迂回するように迂回搬送ラインを備えるようにして、該迂回搬送ラインを使用することでワークの順序を変更するようにしていた(特許文献1参照)。また、その他の従来のワーク搬送装置として、クランプ部を2つ有するロボットハンドが採用されていた。
【0003】
しかしながら、2種類のワークの順序を変更するような比較的に簡単な順序変更を行う場合、上述した従来のワーク搬送装置では、その効果に対する設備費が高く採用することはできない。また、上述した従来のワーク搬送装置では、シリンダ等の駆動手段や多数のセンサーを備える必要がありその構造が複雑化する。しかも、従来のワーク搬送装置では、シリンダ等の推力を高く設定する必要があり、作業者との隔離が必要となり採用することが困難になる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−212314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した従来のワーク搬送装置では、その構造が複雑であり設備費が高く採用することができない。
【0006】
本発明は、かかる点に鑑みてなされたものであり、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のワーク搬送装置は、モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、を備えることを特徴としている。
これにより、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することができる。
なお、本発明のワーク搬送装置の各種態様およびそれらの作用については、以下の発明の態様の項において詳しく説明する。
【0008】
(発明の態様)
以下に、本願において特許請求が可能と認識されている発明(以下、「請求可能発明」という場合がある。)の態様をいくつか例示し、それらについて説明する。なお、各態様は、請求項と同様に、項に区分し、各項に番号を付して、必要に応じて他の項を引用する形式で記載する。これは、あくまでも請求可能発明の理解を容易にするためであり、請求可能発明を構成する構成要素の組み合わせを、以下の各項に記載されたものに限定する趣旨ではない。つまり、請求可能発明は、各項に付随する記載、実施の形態等を参酌して解釈されるべきであり、その解釈に従う限りにおいて、各項の態様にさらに他の構成要件を付加した態様も、また、各項の態様から構成要件を削除した態様も、請求可能発明の一態様となり得るのである。なお、以下の各項において、(1)項、(2)項、(3)項、(5)項、(7)項、(8)項、(9)項の各々が、請求項1〜7の各々に相当する。
【0009】
(1)搬送ライン上のワークの順序を変更するワーク搬送装置であって、モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、を備えることを特徴とするワーク搬送装置。
(1)項のワーク搬送装置では、コンベアを搬送ラインからのワークの搬入部と対向させて、例えば2種類のワークが搬送ラインからコンベア上に順次搬入されて、コンベア上に2種類のワークが直列に載置される。続いて、モータを駆動させると、支持アームが回転軸を中心に180°回転されると共にコンベアが回転され、該コンベアがワークの搬出部に対向するように位置する。そして、コンベア上から2種類のワークがその順序が搬入時と入れ替わった状態で搬出部へ搬出される。
【0010】
(2)前記コンベアは、その上面がワークの搬送方向に向かって下方傾斜していることを特徴とする(1)項に記載のワーク搬送装置。
(2)項のワーク搬送装置では、ワークをコンベア上に搬入する際、また、ワークをコンベア上から搬出する際、ワークが自重でコンベア上を移動するようになる。
【0011】
(3)前記コンベアは、前記支持アームの長手方向に間隔を置いて複数設けられることを特徴とする(1)項または(2)項に記載のワーク搬送装置。
(3)項のワーク搬送装置では、一つのコンベアに対して、一つのワークを載置することができるので、各ワークを安定して搬送することができる。
【0012】
(4)前記支持アームの下方に前記コンベアが配置されることを特徴とする(1)項〜(3)項のいずれかに記載のワーク搬送装置。
(4)項のワーク搬送装置では、ワーク搬送装置全体がコンパクトに構成される。
【0013】
(5)前記各コンベアが前記搬送ラインからのワークの搬入部に対向した際、各コンベアは、その高さが前記搬入部に向かって次第に高くなるように前記支持アームにそれぞれ支持されることを特徴とする(3)項または(4)項に記載のワーク搬送装置。
(6)各コンベアの上面は、略同一平面上に位置することを特徴とする(5)項に記載のワーク搬送装置。
(5)項及び(6)項のワーク搬送装置では、複数種類のワークが搬送ラインから自重により順次各コンベアの上面に搬入されて載置される。なお、各コンべアの上面の下流側端にはワークの移動を規制するストッパが出没自在に備えられ、適宜タイミングで各コンベアの各ストッパが出没するようになる。
【0014】
(7)前記各コンベアがワークの搬出部に対向した際、各コンベアの高さが前記搬出部に向かって次第に低くなるようにその高さを変動させる高さ変動手段を備えることを特徴とする(3)項〜(6)項のいずれかに記載のワーク搬送装置。
(7)項のワーク搬送装置では、高さ変動手段により高さ変動が要求されるコンベアが適宜高さに変動することで、各コンベアがその高さが搬出部に向かって次第に低くなるように配置されるために、各ワークが各コンベアから自重により順次搬出される。
【0015】
(8)前記高さ変動手段は、高さ変動を要求されるコンベアと前記支持アームとを連結する伸縮自在の支持部材と、当該コンベアが前記支持アームの回転に沿ってワークの搬出部側に移動する際該コンベアに当接して上昇させる傾斜面を有するブロック体とを備えて構成されることを特徴とする(7)項に記載のワーク搬送装置。
(8)項のワーク搬送装置では、高さ変動が要求されるコンベアが支持アームの回転に伴ってワークの搬出部側に移動すると、当該コンベアがブロック体の傾斜面に接触して、傾斜面に沿って移動すると共に支持部材が縮むことで所望高さまで上昇するようになる。
【0016】
(9)前記モータの回転軸と同心状に配置される固定ギヤと、前記各コンベアに連結されると共に前記支持アームに回転自在に連結され、前記固定ギヤから順次互いに噛合する各回転ギヤと、を備えることを特徴とする(8)項に記載のワーク搬送装置。
(9)項のワーク搬送装置では、モータの駆動により支持アームが回転軸を中心に回転すると同時に各コンベアも回転軸を中心に回転する。その時、各回転ギヤが固定ギヤの周りを回転(公転)しながらそれぞれ自転し、各コンベアも同じように動作する。この結果、高さ変動が要求されるコンベアがブロック体の傾斜面に接触して上昇する際の推力不足が解消されて、当該コンベアがスムーズにブロック体の傾斜面に沿って上昇するようになる。
【発明の効果】
【0017】
本発明によれば、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供することができる。
【図面の簡単な説明】
【0018】
【図1】図1は、本発明の実施の形態に係るワーク搬送装置を概略的に示す平面図である。
【図2】図2は、本発明の実施の形態に係るワーク搬送装置を概略的に示す側面図である。
【図3】図3は、本発明の実施の形態に係るワーク搬送装置の高さ変動手段の一構成部材を搬出部側から見た図である。
【図4】図4は、本発明の実施の形態に係るワーク搬送装置の作用を段階的に示す図である。
【図5】図5は、図4(e)の状態の側面図である。
【図6】図6は、図4(e)の状態で、第2コンベアがブロック体の傾斜面に沿って上昇する様子を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための形態を図1〜図6に基づいて詳細に説明する。
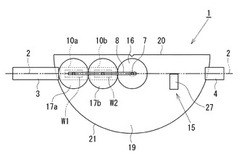
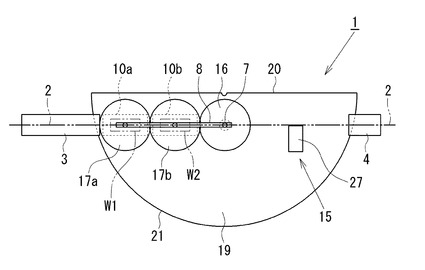
本発明の実施の形態に係るワーク搬送装置1は、図1に示すように、ワークW1、W2の搬送ライン2上に備えられ、搬送ライン2(図1の2点鎖線)上の複数種類(本実施の形態では2種類)のワークW1、W2を搬入部3から受け入れて、その順序を入れ替えた状態で搬出部4から搬出するものである。
【0020】
本発明の実施の形態に係るワーク搬送装置1は、図1及び図2に示すように、搬送ライン2上に備えられるモータ6と、該モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8にその長手方向に間隔を置いて連結され、ワークW1、W2がそれぞれ載置される第1及び第2コンベア10a、10bと、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際、第1及び第2コンベア10a、10bの高さが搬出部4に向かって次第に低くなるようにその高さを変動させる高さ変動手段15と、モータ6の回転軸7と同心状に配置される固定ギヤ16と、第2コンベア10bに連結されると共に支持アーム8に回転自在に連結され、固定ギヤ16と互いに噛合する第2回転ギヤ17bと、第1コンベア10aに連結されると共に支持アーム8に回転自在に連結され、第2回転ギヤ17bと互いに噛合する第1回転ギヤ17aとを備えている。
なお、本実施の形態では、第1及び第2コンベア10a、10b及び第1及び第2回転ギヤ17a、17bを備えているが、コンベア及び回転ギヤは、必要に応じてワークの種類(数量)に対応して複数備えられる。
【0021】
図1及び図2に示すように、本ワーク搬送装置1は、平面視半円形状のベース19が備えられている。該ベース19の直線部20が搬送ライン2と平行となるように配置される。ベース19の半円弧部21を形成する中心付近に支持台22が備えられる。該支持台22上にモータ6がその回転軸7が上方に向くように配置される。そして、ベース19のモータ6の位置から左側端部が搬送ライン2からのワークW1、W2の搬入部3となり、一方、ベース19のモータ6の位置から右側端部がワークW1、W2の搬出部4となる。
【0022】
第1及び第2コンベア10a、10bは、従動ローラ(図示略)が長手方向に沿って間隔を置いて複数設けられて構成される。また、第1及び第2コンベア10a、10bの奥側端部にはワークW1、W2の移動を規制する第1及び第2ストッパ23a、23bが出没自在にそれぞれ設けられる。該第1及び第2ストッパ23a、23bは、適宜タイミングで第1及び第2コンベア10a、10bの上面から出没する。
【0023】
モータ6の回転軸7には支持アーム8の一端部が連結される。該支持アーム8は、モータ6の回転軸7と略直交する方向に延びる。そして、支持アーム8は、モータ6の回転軸7の回転駆動により回転軸7を中心に、ベース19上で搬入部3と搬出部4との間の半円の範囲を回転する。
【0024】
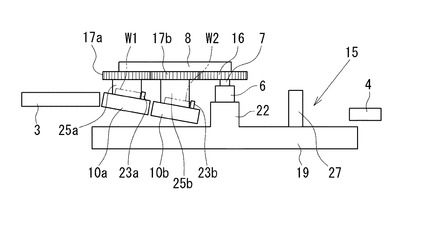
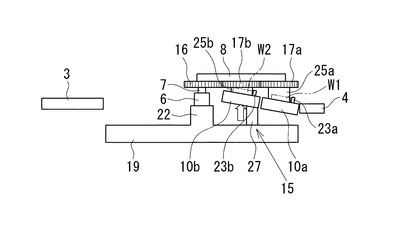
また、支持アーム8の長手方向には間隔を置いて第1及び第2コンベア10a、10bがそれぞれ連結される。第1及び第2コンベア10a、10bは、支持アーム8に柱状または筒状の第1及び第2支持部材25a、25bによりそれぞれ支持される。第1コンベア10a側の第1支持部材25aは、第2コンベア10b側の第2支持部材25bよりもその高さが低く構成されている。但し、後で詳述するが、第2支持部材25bだけは伸縮自在に構成される。その結果、第1及び第2コンベア10a、10bが搬入部3に対向した際には、これら第1及び第2コンベア10a、10bは、その高さが搬入部3に向かって次第に高くなるようになる。また、第1及び第2コンベア10a、10bは、その全体が搬送方向に向かって下方傾斜した状態で第1及び第2支持部材25a、25bの下端に連結される。第1コンベア10aの上面と、第2コンベア10bの上面とは同一平面上に位置する。
【0025】
モータ6と支持アーム8の一端部との間には、モータ6の回転軸7と同心状に固定ギヤ16が配置される。モータ6の回転軸7は固定ギヤ16の中心に設けた挿通孔に挿通されるだけで、回転軸7からの回転駆動は固定ギヤ16には伝達されない。なお、固定ギヤ16は図示しない連結部材を介してベース19に連結される。第2コンベア10b側の第2支持部材25bの上端と支持アーム8との間には、第2支持部材25bに連結されると共に支持アーム8に回転自在に連結される第2回転ギヤ17bが配置される。第2回転ギヤ17bは第2支持部材25bと同心状に配置される。第2回転ギヤ17bと固定ギヤ16とは互いに噛合している。第1コンベア10a側の第1支持部材25aの上端と支持アーム8との間には、第1支持部材25aに連結されると共に支持アーム8に回転自在に連結される第1回転ギヤ17aが配置される。第1回転ギヤ17aは第1支持部材25aと同心状に配置される。第1回転ギヤ17aと第2回転ギヤ17bとは互いに噛合している。
【0026】
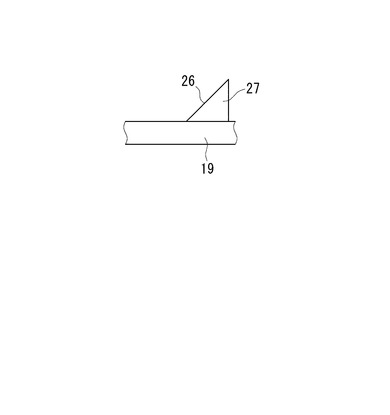
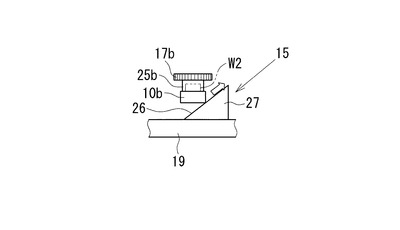
高さ変動手段15は、上述したように図5を参照しながら、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際、第1及び第2コンベア10a、10bの高さが搬出部4に向かって次第に低くなるようにその高さを変動させるものである。図1〜図3に示すように、該高さ変動手段15は、高さ変動が要求される第2コンベア10bと支持アーム8とを連結する伸縮自在の第2支持部材25bと、ベース19上の搬出部4側に設けられ、第2コンベア10bが支持アーム8の回転に沿って搬出部4側に移動する際第2コンベア10bの下周縁に当接して上昇させる傾斜面26を有するブロック体27とから構成される。
【0027】
ブロック体27は、所定厚の三角形状に形成される。該ブロック体27は、第2コンベア10bの進行方向に沿って上方に向かって傾斜する傾斜面26がベース19の半円弧部21側に向くように配置される。
なお、高さ変動手段15のブロック体27の傾斜面26の傾斜角度は、第2コンベア10bが搬出部4と対向する位置に到達した際、該第2コンベア10bの上面と、第1コンベア10aの上面とが略同一平面上になる高さまで上昇されるように設定される(図5の状態)。
【0028】
次に、本発明の実施の形態に係るワーク搬送装置1の作用を図1〜図6に基づいて説明する。
まず、図1及び図2に示すように、第1及び第2コンベア10a、10bがワークW1、W2の搬入部3と対向する位置に停止される。その時、第2コンベア10bの第2支持部材25bは最大限伸長した状態となっている。第1コンベア10aの第1ストッパ23aが没入状態で、一方、第2コンベア10bの第2ストッパ23bが突出状態となっている。
次に、最初のワークW2が搬送ライン2から搬入部3を経由して第1コンベア10a上及び第2コンベア10b上を自重により移動して最終的に第2コンベア10b上に載置される。その後、第1コンベア10aの第1ストッパ23aが突出される。続いて、次のワークW1が搬送ライン2から搬入部3を経由して第1コンベア10a上を自重により移動して最終的に第1コンベア10a上に載置される。
【0029】
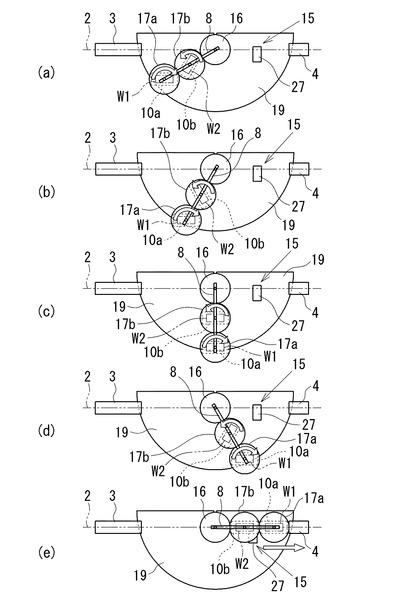
次に、モータ6が駆動される。すると、図4(a)〜(e)に示すように、支持アーム8が回転軸7を中心に反時計周り方向に略180°回転すると同時に第1及び第2回転ギヤ17a、17bも同方向に回転(公転)する。この時、第1及び第2回転ギヤ17a、17bは、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながら支持アーム8との連結部位を中心にそれぞれ自転する。なお、第2回転ギヤ17bは反時計周り方向に、また、第1回転ギヤ17aは時計周り方向にそれぞれ自転する。その結果、第1及び第2回転ギヤ17a、17bに第1及び第2支持部材25a、25bを介して連結される第1及び第2コンベア10a、10bが、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながらそれぞれ自転する。
【0030】
次に、図4(e)、図5及び図6に示すように、第1及び第2コンベア10a、10bがワークの搬出部4に対向する直前に、第2コンベア10bの下周縁が高さ変動手段15のブロック体27の傾斜面26に接触すると共にその傾斜に沿って上昇し、且つ第2支持部材25bが縮むようになる。その結果、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際には、第2コンベア10bが第1コンベア10aよりも高い位置まで上昇して停止する。この時、第2コンベア10bは、その全体が搬送方向に向かって下方傾斜している状態が維持され、第1コンベア10aの上面と第2コンベア10bの上面とが略同一平面上に位置するようになる。
【0031】
なお、支持アーム8の回転に伴って第2コンベア10bが自転する際の、該第2コンベア10bの角速度V2はモータ6の角速度Vmの2倍になる。そのため、第2コンベア10bが固定ギヤ16の周りを公転しながら自転し、第2コンベア10bの下周縁がブロック体27の傾斜面26に接触する際の速度Vは次のようになる。すなわち、第2回転ギヤ17bの直径をL、モータ6の角速度をVmとすると、速度V=2LVmとなる。この速度Vは、固定ギヤ16、第1及び第2回転ギヤ17a、17bを採用せずに、第1及び第2コンベア10a、10bを支持アーム8だけで回転させて、第2コンベア10bの下周縁をブロック体27の傾斜面26に接触させる際の速度よりも約33%高くなる。この結果、第2コンベア10bがブロック体27の傾斜面26に接触して上昇する際の摩擦力による推力不足が解消されて、第2コンベア10bがスムーズにブロック体27の傾斜面26に沿って上昇するようになる。
【0032】
次に、第1コンベア10aの第1ストッパ23aが没入されると、第1コンベア10a上の、搬入部3から2番目に載置されたワークW1が第1コンベア10a上を自重により移動して搬出部4に搬出される。続いて、第2コンベア10bの第2ストッパ23bが没入されると、第2コンベア10b上の、搬入部3から最初に載置されたワークW2が自重により第2コンベア10b上から第1コンベア10a上を経由して搬出部4から搬出される。これから解るように、本ワーク搬送装置1では、搬送ライン2からワークW2→ワークW1の順序で受け入れ、その順序を入れ替えワークW1→ワークW2の順序で搬出部4から搬出することが可能になる。なお、搬出部4から順次搬出されるワークW1、W2は、その向きが搬入部3からの搬入時に対して180°反転された状態で搬出部4に搬出されることになる。
【0033】
次に、第1及び第2コンベア10a、10bからワークW1、W2が搬出部4に搬出された後は、支持アーム8の時計周り方向への回転が開始される。すると、第2コンベア10bがブロック体27の傾斜面26に沿って下降すると共に第2支持部材25bが伸長した状態となり、第1及び第2コンベア10a、10bが、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながらそれぞれ自転し、搬入部3と対向する位置に停止されて初期状態(図1の状態)に戻る。
【0034】
以上説明したように、本発明の実施の形態に係るワーク搬送装置1では、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、ワークW1、W2がそれぞれ載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。これにより、構造を簡素化して、搬送ライン2上を搬送されるワークW1、W2の順序を容易に変更することが可能になる。
【0035】
また、本発明の実施の形態に係るワーク搬送装置1では、第1及び第2コンベア10a、10bは、その全体がワークW1、W2の搬送方向に向かって下方傾斜して構成しているので、各ワークW1、W2を第1及び第2コンベア10a、10b上に搬入する際、また、ワークW1、W2を第1及び第2コンベア10a、10b上から搬出する際、ワークW1、W2が自重で第1及び第2コンベア10a、10b上を移動できるようになる。
なお、本実施の形態では、第1及び第2コンベア10a、10bは、その全体がワークW1、W2の搬送方向に向かって下方傾斜して構成されているが、第1及び第2コンベア10a、10bの上面だけを下方傾斜させて構成してもよい。
【0036】
さらに、本発明の実施の形態に係るワーク搬送装置1は、モータ6の回転軸7と同心状に配置される固定ギヤ16と、第2コンベア10bに連結されると共に支持アーム8に回転自在に連結され、固定ギヤ16と互いに噛合する第2回転ギヤ17bと、第1コンベア10aに連結されると共に支持アーム8に対して回転自在に連結され、第2回転ギヤ17bと互いに噛合する第1回転ギヤ17aとを備えている。これにより、上述したように、支持アーム8の回転に伴って、高さ変動が要求される第2コンベア10bが固定ギヤ16の周りを公転しながら自転しつつ、ブロック体27の傾斜面26に接触して上昇するので、上昇時の摩擦力による推力不足が解消されて、第2コンベア10bがスムーズにブロック体27の傾斜面26に沿って上昇することができる。これにより、本ワーク搬送装置1では、作業者と隔離が必要な推力が適用されることはない。
【0037】
なお、上述した本実施の形態に係るワーク搬送装置1では、支持アーム8の長手方向に沿って間隔を置いて第1及び第2コンベア10a、10bがそれぞれ配置されているが、コンベアを1台備えるようにしても構わない。この形態の場合には、搬送ライン2から複数のワークW1、W2をコンベア上に直列に配置する。そして、支持アーム8をモータ6の回転軸7を中心に180°回転させれば、ワークW1、W2の順序を入れ替えた状態で搬出部4から搬出することができる。しかも、この形態の場合には、コンベアが1台しか構成されないために、固定ギヤ16、第1及び第2回転ギヤ17a、17b及び高さ変動手段15を採用する必要はない。
【0038】
また、上述した本実施の形態に係るワーク搬送装置1では、モータ6の回転軸7に支持アーム8が連結されているが、アームに限らず円板状回転部材等を連結してもよい。この形態の場合には、円板状回転部材の径方向に間隔を置いて第1及び第2コンベア10a、10bを連結すればよい。
【符号の説明】
【0039】
1 ワーク搬送装置,2 搬送ライン,3 搬入部,4 搬出部,6 モータ,7 回転軸,8 支持アーム,10a 第1コンベア,10b 第2コンベア,15 高さ変動手段,16 固定ギヤ,17a 第1回転ギヤ,17b 第2回転ギヤ,25a 第1支持部材,25b 第2支持部材,26 傾斜面,27 ブロック体,W1、W2 ワーク
【技術分野】
【0001】
本発明は、ワーク搬送装置に関し、詳しくは、搬送ラインを搬送される複数種類のワークの順序を変更するワーク搬送装置に関するものである。
【背景技術】
【0002】
一般に、ワークの順序を変更するワーク搬送装置は、一時的に搬送ラインの本線から迂回するように迂回搬送ラインを備えるようにして、該迂回搬送ラインを使用することでワークの順序を変更するようにしていた(特許文献1参照)。また、その他の従来のワーク搬送装置として、クランプ部を2つ有するロボットハンドが採用されていた。
【0003】
しかしながら、2種類のワークの順序を変更するような比較的に簡単な順序変更を行う場合、上述した従来のワーク搬送装置では、その効果に対する設備費が高く採用することはできない。また、上述した従来のワーク搬送装置では、シリンダ等の駆動手段や多数のセンサーを備える必要がありその構造が複雑化する。しかも、従来のワーク搬送装置では、シリンダ等の推力を高く設定する必要があり、作業者との隔離が必要となり採用することが困難になる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−212314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した従来のワーク搬送装置では、その構造が複雑であり設備費が高く採用することができない。
【0006】
本発明は、かかる点に鑑みてなされたものであり、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のワーク搬送装置は、モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、を備えることを特徴としている。
これにより、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することができる。
なお、本発明のワーク搬送装置の各種態様およびそれらの作用については、以下の発明の態様の項において詳しく説明する。
【0008】
(発明の態様)
以下に、本願において特許請求が可能と認識されている発明(以下、「請求可能発明」という場合がある。)の態様をいくつか例示し、それらについて説明する。なお、各態様は、請求項と同様に、項に区分し、各項に番号を付して、必要に応じて他の項を引用する形式で記載する。これは、あくまでも請求可能発明の理解を容易にするためであり、請求可能発明を構成する構成要素の組み合わせを、以下の各項に記載されたものに限定する趣旨ではない。つまり、請求可能発明は、各項に付随する記載、実施の形態等を参酌して解釈されるべきであり、その解釈に従う限りにおいて、各項の態様にさらに他の構成要件を付加した態様も、また、各項の態様から構成要件を削除した態様も、請求可能発明の一態様となり得るのである。なお、以下の各項において、(1)項、(2)項、(3)項、(5)項、(7)項、(8)項、(9)項の各々が、請求項1〜7の各々に相当する。
【0009】
(1)搬送ライン上のワークの順序を変更するワーク搬送装置であって、モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、を備えることを特徴とするワーク搬送装置。
(1)項のワーク搬送装置では、コンベアを搬送ラインからのワークの搬入部と対向させて、例えば2種類のワークが搬送ラインからコンベア上に順次搬入されて、コンベア上に2種類のワークが直列に載置される。続いて、モータを駆動させると、支持アームが回転軸を中心に180°回転されると共にコンベアが回転され、該コンベアがワークの搬出部に対向するように位置する。そして、コンベア上から2種類のワークがその順序が搬入時と入れ替わった状態で搬出部へ搬出される。
【0010】
(2)前記コンベアは、その上面がワークの搬送方向に向かって下方傾斜していることを特徴とする(1)項に記載のワーク搬送装置。
(2)項のワーク搬送装置では、ワークをコンベア上に搬入する際、また、ワークをコンベア上から搬出する際、ワークが自重でコンベア上を移動するようになる。
【0011】
(3)前記コンベアは、前記支持アームの長手方向に間隔を置いて複数設けられることを特徴とする(1)項または(2)項に記載のワーク搬送装置。
(3)項のワーク搬送装置では、一つのコンベアに対して、一つのワークを載置することができるので、各ワークを安定して搬送することができる。
【0012】
(4)前記支持アームの下方に前記コンベアが配置されることを特徴とする(1)項〜(3)項のいずれかに記載のワーク搬送装置。
(4)項のワーク搬送装置では、ワーク搬送装置全体がコンパクトに構成される。
【0013】
(5)前記各コンベアが前記搬送ラインからのワークの搬入部に対向した際、各コンベアは、その高さが前記搬入部に向かって次第に高くなるように前記支持アームにそれぞれ支持されることを特徴とする(3)項または(4)項に記載のワーク搬送装置。
(6)各コンベアの上面は、略同一平面上に位置することを特徴とする(5)項に記載のワーク搬送装置。
(5)項及び(6)項のワーク搬送装置では、複数種類のワークが搬送ラインから自重により順次各コンベアの上面に搬入されて載置される。なお、各コンべアの上面の下流側端にはワークの移動を規制するストッパが出没自在に備えられ、適宜タイミングで各コンベアの各ストッパが出没するようになる。
【0014】
(7)前記各コンベアがワークの搬出部に対向した際、各コンベアの高さが前記搬出部に向かって次第に低くなるようにその高さを変動させる高さ変動手段を備えることを特徴とする(3)項〜(6)項のいずれかに記載のワーク搬送装置。
(7)項のワーク搬送装置では、高さ変動手段により高さ変動が要求されるコンベアが適宜高さに変動することで、各コンベアがその高さが搬出部に向かって次第に低くなるように配置されるために、各ワークが各コンベアから自重により順次搬出される。
【0015】
(8)前記高さ変動手段は、高さ変動を要求されるコンベアと前記支持アームとを連結する伸縮自在の支持部材と、当該コンベアが前記支持アームの回転に沿ってワークの搬出部側に移動する際該コンベアに当接して上昇させる傾斜面を有するブロック体とを備えて構成されることを特徴とする(7)項に記載のワーク搬送装置。
(8)項のワーク搬送装置では、高さ変動が要求されるコンベアが支持アームの回転に伴ってワークの搬出部側に移動すると、当該コンベアがブロック体の傾斜面に接触して、傾斜面に沿って移動すると共に支持部材が縮むことで所望高さまで上昇するようになる。
【0016】
(9)前記モータの回転軸と同心状に配置される固定ギヤと、前記各コンベアに連結されると共に前記支持アームに回転自在に連結され、前記固定ギヤから順次互いに噛合する各回転ギヤと、を備えることを特徴とする(8)項に記載のワーク搬送装置。
(9)項のワーク搬送装置では、モータの駆動により支持アームが回転軸を中心に回転すると同時に各コンベアも回転軸を中心に回転する。その時、各回転ギヤが固定ギヤの周りを回転(公転)しながらそれぞれ自転し、各コンベアも同じように動作する。この結果、高さ変動が要求されるコンベアがブロック体の傾斜面に接触して上昇する際の推力不足が解消されて、当該コンベアがスムーズにブロック体の傾斜面に沿って上昇するようになる。
【発明の効果】
【0017】
本発明によれば、構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供することができる。
【図面の簡単な説明】
【0018】
【図1】図1は、本発明の実施の形態に係るワーク搬送装置を概略的に示す平面図である。
【図2】図2は、本発明の実施の形態に係るワーク搬送装置を概略的に示す側面図である。
【図3】図3は、本発明の実施の形態に係るワーク搬送装置の高さ変動手段の一構成部材を搬出部側から見た図である。
【図4】図4は、本発明の実施の形態に係るワーク搬送装置の作用を段階的に示す図である。
【図5】図5は、図4(e)の状態の側面図である。
【図6】図6は、図4(e)の状態で、第2コンベアがブロック体の傾斜面に沿って上昇する様子を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明を実施するための形態を図1〜図6に基づいて詳細に説明する。
本発明の実施の形態に係るワーク搬送装置1は、図1に示すように、ワークW1、W2の搬送ライン2上に備えられ、搬送ライン2(図1の2点鎖線)上の複数種類(本実施の形態では2種類)のワークW1、W2を搬入部3から受け入れて、その順序を入れ替えた状態で搬出部4から搬出するものである。
【0020】
本発明の実施の形態に係るワーク搬送装置1は、図1及び図2に示すように、搬送ライン2上に備えられるモータ6と、該モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8にその長手方向に間隔を置いて連結され、ワークW1、W2がそれぞれ載置される第1及び第2コンベア10a、10bと、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際、第1及び第2コンベア10a、10bの高さが搬出部4に向かって次第に低くなるようにその高さを変動させる高さ変動手段15と、モータ6の回転軸7と同心状に配置される固定ギヤ16と、第2コンベア10bに連結されると共に支持アーム8に回転自在に連結され、固定ギヤ16と互いに噛合する第2回転ギヤ17bと、第1コンベア10aに連結されると共に支持アーム8に回転自在に連結され、第2回転ギヤ17bと互いに噛合する第1回転ギヤ17aとを備えている。
なお、本実施の形態では、第1及び第2コンベア10a、10b及び第1及び第2回転ギヤ17a、17bを備えているが、コンベア及び回転ギヤは、必要に応じてワークの種類(数量)に対応して複数備えられる。
【0021】
図1及び図2に示すように、本ワーク搬送装置1は、平面視半円形状のベース19が備えられている。該ベース19の直線部20が搬送ライン2と平行となるように配置される。ベース19の半円弧部21を形成する中心付近に支持台22が備えられる。該支持台22上にモータ6がその回転軸7が上方に向くように配置される。そして、ベース19のモータ6の位置から左側端部が搬送ライン2からのワークW1、W2の搬入部3となり、一方、ベース19のモータ6の位置から右側端部がワークW1、W2の搬出部4となる。
【0022】
第1及び第2コンベア10a、10bは、従動ローラ(図示略)が長手方向に沿って間隔を置いて複数設けられて構成される。また、第1及び第2コンベア10a、10bの奥側端部にはワークW1、W2の移動を規制する第1及び第2ストッパ23a、23bが出没自在にそれぞれ設けられる。該第1及び第2ストッパ23a、23bは、適宜タイミングで第1及び第2コンベア10a、10bの上面から出没する。
【0023】
モータ6の回転軸7には支持アーム8の一端部が連結される。該支持アーム8は、モータ6の回転軸7と略直交する方向に延びる。そして、支持アーム8は、モータ6の回転軸7の回転駆動により回転軸7を中心に、ベース19上で搬入部3と搬出部4との間の半円の範囲を回転する。
【0024】
また、支持アーム8の長手方向には間隔を置いて第1及び第2コンベア10a、10bがそれぞれ連結される。第1及び第2コンベア10a、10bは、支持アーム8に柱状または筒状の第1及び第2支持部材25a、25bによりそれぞれ支持される。第1コンベア10a側の第1支持部材25aは、第2コンベア10b側の第2支持部材25bよりもその高さが低く構成されている。但し、後で詳述するが、第2支持部材25bだけは伸縮自在に構成される。その結果、第1及び第2コンベア10a、10bが搬入部3に対向した際には、これら第1及び第2コンベア10a、10bは、その高さが搬入部3に向かって次第に高くなるようになる。また、第1及び第2コンベア10a、10bは、その全体が搬送方向に向かって下方傾斜した状態で第1及び第2支持部材25a、25bの下端に連結される。第1コンベア10aの上面と、第2コンベア10bの上面とは同一平面上に位置する。
【0025】
モータ6と支持アーム8の一端部との間には、モータ6の回転軸7と同心状に固定ギヤ16が配置される。モータ6の回転軸7は固定ギヤ16の中心に設けた挿通孔に挿通されるだけで、回転軸7からの回転駆動は固定ギヤ16には伝達されない。なお、固定ギヤ16は図示しない連結部材を介してベース19に連結される。第2コンベア10b側の第2支持部材25bの上端と支持アーム8との間には、第2支持部材25bに連結されると共に支持アーム8に回転自在に連結される第2回転ギヤ17bが配置される。第2回転ギヤ17bは第2支持部材25bと同心状に配置される。第2回転ギヤ17bと固定ギヤ16とは互いに噛合している。第1コンベア10a側の第1支持部材25aの上端と支持アーム8との間には、第1支持部材25aに連結されると共に支持アーム8に回転自在に連結される第1回転ギヤ17aが配置される。第1回転ギヤ17aは第1支持部材25aと同心状に配置される。第1回転ギヤ17aと第2回転ギヤ17bとは互いに噛合している。
【0026】
高さ変動手段15は、上述したように図5を参照しながら、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際、第1及び第2コンベア10a、10bの高さが搬出部4に向かって次第に低くなるようにその高さを変動させるものである。図1〜図3に示すように、該高さ変動手段15は、高さ変動が要求される第2コンベア10bと支持アーム8とを連結する伸縮自在の第2支持部材25bと、ベース19上の搬出部4側に設けられ、第2コンベア10bが支持アーム8の回転に沿って搬出部4側に移動する際第2コンベア10bの下周縁に当接して上昇させる傾斜面26を有するブロック体27とから構成される。
【0027】
ブロック体27は、所定厚の三角形状に形成される。該ブロック体27は、第2コンベア10bの進行方向に沿って上方に向かって傾斜する傾斜面26がベース19の半円弧部21側に向くように配置される。
なお、高さ変動手段15のブロック体27の傾斜面26の傾斜角度は、第2コンベア10bが搬出部4と対向する位置に到達した際、該第2コンベア10bの上面と、第1コンベア10aの上面とが略同一平面上になる高さまで上昇されるように設定される(図5の状態)。
【0028】
次に、本発明の実施の形態に係るワーク搬送装置1の作用を図1〜図6に基づいて説明する。
まず、図1及び図2に示すように、第1及び第2コンベア10a、10bがワークW1、W2の搬入部3と対向する位置に停止される。その時、第2コンベア10bの第2支持部材25bは最大限伸長した状態となっている。第1コンベア10aの第1ストッパ23aが没入状態で、一方、第2コンベア10bの第2ストッパ23bが突出状態となっている。
次に、最初のワークW2が搬送ライン2から搬入部3を経由して第1コンベア10a上及び第2コンベア10b上を自重により移動して最終的に第2コンベア10b上に載置される。その後、第1コンベア10aの第1ストッパ23aが突出される。続いて、次のワークW1が搬送ライン2から搬入部3を経由して第1コンベア10a上を自重により移動して最終的に第1コンベア10a上に載置される。
【0029】
次に、モータ6が駆動される。すると、図4(a)〜(e)に示すように、支持アーム8が回転軸7を中心に反時計周り方向に略180°回転すると同時に第1及び第2回転ギヤ17a、17bも同方向に回転(公転)する。この時、第1及び第2回転ギヤ17a、17bは、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながら支持アーム8との連結部位を中心にそれぞれ自転する。なお、第2回転ギヤ17bは反時計周り方向に、また、第1回転ギヤ17aは時計周り方向にそれぞれ自転する。その結果、第1及び第2回転ギヤ17a、17bに第1及び第2支持部材25a、25bを介して連結される第1及び第2コンベア10a、10bが、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながらそれぞれ自転する。
【0030】
次に、図4(e)、図5及び図6に示すように、第1及び第2コンベア10a、10bがワークの搬出部4に対向する直前に、第2コンベア10bの下周縁が高さ変動手段15のブロック体27の傾斜面26に接触すると共にその傾斜に沿って上昇し、且つ第2支持部材25bが縮むようになる。その結果、第1及び第2コンベア10a、10bがワークW1、W2の搬出部4に対向した際には、第2コンベア10bが第1コンベア10aよりも高い位置まで上昇して停止する。この時、第2コンベア10bは、その全体が搬送方向に向かって下方傾斜している状態が維持され、第1コンベア10aの上面と第2コンベア10bの上面とが略同一平面上に位置するようになる。
【0031】
なお、支持アーム8の回転に伴って第2コンベア10bが自転する際の、該第2コンベア10bの角速度V2はモータ6の角速度Vmの2倍になる。そのため、第2コンベア10bが固定ギヤ16の周りを公転しながら自転し、第2コンベア10bの下周縁がブロック体27の傾斜面26に接触する際の速度Vは次のようになる。すなわち、第2回転ギヤ17bの直径をL、モータ6の角速度をVmとすると、速度V=2LVmとなる。この速度Vは、固定ギヤ16、第1及び第2回転ギヤ17a、17bを採用せずに、第1及び第2コンベア10a、10bを支持アーム8だけで回転させて、第2コンベア10bの下周縁をブロック体27の傾斜面26に接触させる際の速度よりも約33%高くなる。この結果、第2コンベア10bがブロック体27の傾斜面26に接触して上昇する際の摩擦力による推力不足が解消されて、第2コンベア10bがスムーズにブロック体27の傾斜面26に沿って上昇するようになる。
【0032】
次に、第1コンベア10aの第1ストッパ23aが没入されると、第1コンベア10a上の、搬入部3から2番目に載置されたワークW1が第1コンベア10a上を自重により移動して搬出部4に搬出される。続いて、第2コンベア10bの第2ストッパ23bが没入されると、第2コンベア10b上の、搬入部3から最初に載置されたワークW2が自重により第2コンベア10b上から第1コンベア10a上を経由して搬出部4から搬出される。これから解るように、本ワーク搬送装置1では、搬送ライン2からワークW2→ワークW1の順序で受け入れ、その順序を入れ替えワークW1→ワークW2の順序で搬出部4から搬出することが可能になる。なお、搬出部4から順次搬出されるワークW1、W2は、その向きが搬入部3からの搬入時に対して180°反転された状態で搬出部4に搬出されることになる。
【0033】
次に、第1及び第2コンベア10a、10bからワークW1、W2が搬出部4に搬出された後は、支持アーム8の時計周り方向への回転が開始される。すると、第2コンベア10bがブロック体27の傾斜面26に沿って下降すると共に第2支持部材25bが伸長した状態となり、第1及び第2コンベア10a、10bが、支持アーム8の回転に伴い固定ギヤ16の周りを公転しながらそれぞれ自転し、搬入部3と対向する位置に停止されて初期状態(図1の状態)に戻る。
【0034】
以上説明したように、本発明の実施の形態に係るワーク搬送装置1では、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、ワークW1、W2がそれぞれ載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。これにより、構造を簡素化して、搬送ライン2上を搬送されるワークW1、W2の順序を容易に変更することが可能になる。
【0035】
また、本発明の実施の形態に係るワーク搬送装置1では、第1及び第2コンベア10a、10bは、その全体がワークW1、W2の搬送方向に向かって下方傾斜して構成しているので、各ワークW1、W2を第1及び第2コンベア10a、10b上に搬入する際、また、ワークW1、W2を第1及び第2コンベア10a、10b上から搬出する際、ワークW1、W2が自重で第1及び第2コンベア10a、10b上を移動できるようになる。
なお、本実施の形態では、第1及び第2コンベア10a、10bは、その全体がワークW1、W2の搬送方向に向かって下方傾斜して構成されているが、第1及び第2コンベア10a、10bの上面だけを下方傾斜させて構成してもよい。
【0036】
さらに、本発明の実施の形態に係るワーク搬送装置1は、モータ6の回転軸7と同心状に配置される固定ギヤ16と、第2コンベア10bに連結されると共に支持アーム8に回転自在に連結され、固定ギヤ16と互いに噛合する第2回転ギヤ17bと、第1コンベア10aに連結されると共に支持アーム8に対して回転自在に連結され、第2回転ギヤ17bと互いに噛合する第1回転ギヤ17aとを備えている。これにより、上述したように、支持アーム8の回転に伴って、高さ変動が要求される第2コンベア10bが固定ギヤ16の周りを公転しながら自転しつつ、ブロック体27の傾斜面26に接触して上昇するので、上昇時の摩擦力による推力不足が解消されて、第2コンベア10bがスムーズにブロック体27の傾斜面26に沿って上昇することができる。これにより、本ワーク搬送装置1では、作業者と隔離が必要な推力が適用されることはない。
【0037】
なお、上述した本実施の形態に係るワーク搬送装置1では、支持アーム8の長手方向に沿って間隔を置いて第1及び第2コンベア10a、10bがそれぞれ配置されているが、コンベアを1台備えるようにしても構わない。この形態の場合には、搬送ライン2から複数のワークW1、W2をコンベア上に直列に配置する。そして、支持アーム8をモータ6の回転軸7を中心に180°回転させれば、ワークW1、W2の順序を入れ替えた状態で搬出部4から搬出することができる。しかも、この形態の場合には、コンベアが1台しか構成されないために、固定ギヤ16、第1及び第2回転ギヤ17a、17b及び高さ変動手段15を採用する必要はない。
【0038】
また、上述した本実施の形態に係るワーク搬送装置1では、モータ6の回転軸7に支持アーム8が連結されているが、アームに限らず円板状回転部材等を連結してもよい。この形態の場合には、円板状回転部材の径方向に間隔を置いて第1及び第2コンベア10a、10bを連結すればよい。
【符号の説明】
【0039】
1 ワーク搬送装置,2 搬送ライン,3 搬入部,4 搬出部,6 モータ,7 回転軸,8 支持アーム,10a 第1コンベア,10b 第2コンベア,15 高さ変動手段,16 固定ギヤ,17a 第1回転ギヤ,17b 第2回転ギヤ,25a 第1支持部材,25b 第2支持部材,26 傾斜面,27 ブロック体,W1、W2 ワーク
【特許請求の範囲】
【請求項1】
搬送ライン上のワークの順序を変更するワーク搬送装置であって、
モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、
該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、
を備えることを特徴とするワーク搬送装置。
【請求項2】
前記コンベアは、その上面がワークの搬送方向に向かって下方傾斜していることを特徴とする請求項1に記載のワーク搬送装置。
【請求項3】
前記コンベアは、前記支持アームの長手方向に間隔を置いて複数設けられることを特徴とする請求項1または2に記載のワーク搬送装置。
【請求項4】
前記各コンベアが前記搬送ラインからのワークの搬入部に対向した際、各コンベアは、その高さが前記搬入部に向かって次第に高くなるように前記支持アームにそれぞれ支持されることを特徴とする請求項3に記載のワーク搬送装置。
【請求項5】
前記各コンベアがワークの搬出部に対向した際、各コンベアの高さが前記搬出部に向かって次第に低くなるようにその高さを変動させる高さ変動手段を備えることを特徴とする請求項3または4に記載のワーク搬送装置。
【請求項6】
前記高さ変動手段は、高さ変動を要求されるコンベアと前記支持アームとを連結する伸縮自在の支持部材と、当該コンベアが前記支持アームの回転に沿ってワークの搬出部側に移動する際該コンベアに当接して上昇させる傾斜面を有するブロック体とを備えて構成されることを特徴とする請求項5に記載のワーク搬送装置。
【請求項7】
前記モータの回転軸と同心状に配置される固定ギヤと、
前記各コンベアに連結されると共に前記支持アームに回転自在に連結され、前記固定ギヤから順次互いに噛合する各回転ギヤと、
を備えることを特徴とする請求項6に記載のワーク搬送装置。
【請求項1】
搬送ライン上のワークの順序を変更するワーク搬送装置であって、
モータの回転軸に連結され、該回転軸と直交する方向に延びる支持アームと、
該支持アームに連結され、前記搬送ラインからのワークが載置されるコンベアと、
を備えることを特徴とするワーク搬送装置。
【請求項2】
前記コンベアは、その上面がワークの搬送方向に向かって下方傾斜していることを特徴とする請求項1に記載のワーク搬送装置。
【請求項3】
前記コンベアは、前記支持アームの長手方向に間隔を置いて複数設けられることを特徴とする請求項1または2に記載のワーク搬送装置。
【請求項4】
前記各コンベアが前記搬送ラインからのワークの搬入部に対向した際、各コンベアは、その高さが前記搬入部に向かって次第に高くなるように前記支持アームにそれぞれ支持されることを特徴とする請求項3に記載のワーク搬送装置。
【請求項5】
前記各コンベアがワークの搬出部に対向した際、各コンベアの高さが前記搬出部に向かって次第に低くなるようにその高さを変動させる高さ変動手段を備えることを特徴とする請求項3または4に記載のワーク搬送装置。
【請求項6】
前記高さ変動手段は、高さ変動を要求されるコンベアと前記支持アームとを連結する伸縮自在の支持部材と、当該コンベアが前記支持アームの回転に沿ってワークの搬出部側に移動する際該コンベアに当接して上昇させる傾斜面を有するブロック体とを備えて構成されることを特徴とする請求項5に記載のワーク搬送装置。
【請求項7】
前記モータの回転軸と同心状に配置される固定ギヤと、
前記各コンベアに連結されると共に前記支持アームに回転自在に連結され、前記固定ギヤから順次互いに噛合する各回転ギヤと、
を備えることを特徴とする請求項6に記載のワーク搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−71792(P2013−71792A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210594(P2011−210594)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]