
ワーク移載システム
【課題】ワーク供給量のバラツキに関係なく、オーバーフローしないワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
【解決手段】ワーク4を搬送するピックアップコンベア2と、前記ワーク4を載置するためのトレイ5を搬送するプレイスコンベア3と、前記ワーク4を保持および解放して前記トレイ5へ移載する複数台のロボット7と、前記ワーク4および前記トレイ5の位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベア2および前記プレイスコンベア3の搬送速度と前記ロボット7の動作とを制御するコントローラ8とを有するワーク移載システム10において、複数台の前記ロボット7が、前記ワーク4の搬送方向に沿うように配設され、前記センサが、前記ワーク4の搬送方向における前記ロボット7の上流側と、前記トレイ5の搬送方向における前記ロボット7の上流側とに配設されるワーク移載システム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ピックアップコンベア上を搬送されているワークをマニピュレータを備えたロボットで保持および解放することにより、プレイスコンベア上を搬送されているトレイへ移載するワーク移載システムにおいて、ワークのオーバーフローの発生を回避すると共に、作業スペースをより有効に利用可能としたワーク移載システムに関する。
【背景技術】
【0002】
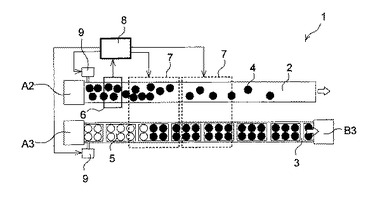
従来のワーク移載システム1は、図8に示すように、ワーク4を搬送するピックアップコンベア2と、トレイ5等の容器をワーク4と同方向に搬送し、ピックアップコンベア2と並列に配置されたプレイスコンベア3と、ワーク4を保持すると共に保持したワーク4を解放するマニピュレータとを備え、ピックアップコンベア2に沿って配置された複数台のロボット7と、これら一連の動作を制御するコントローラ8とを有し、コントローラ8によりロボット7の動作と、ピックアップコンベア2およびプレイスコンベア3の搬送速度とを制御することで、ロボット7でピックアップコンベア2上のワーク4を保持し、保持したワーク4をプレイスコンベア3上のトレイ5内の所定位置において解放して移載するシステムである。
【0003】
ワーク移載システム1におけるワーク4は、ピックアップコンベア2上にランダムもしくは整列されて搬送される。ワーク4をランダムに搬送するランダム搬送では、ワーク4を所定の方向や所定の搬送ピッチに整列させる必要がなく、コスト的に優位な搬送方法である反面、ピックアップコンベア2上を搬送されるワーク4の搬送量を一定に保持することが難しく、急激にワーク4の搬送量が増減することが知られている。また、ワーク4を搬送方向に対して平行もしくは垂直など所定の方向に整列させて搬送する整列搬送では、ピックアップコンベア2上におけるワーク4の搬送量が急激に増加することを防げるものの、ワーク4の搬送ピッチのバラツキやワーク4が部分的に抜け落ちることが知られている。
【0004】
また、ワーク4をプレイスコンベア3上を搬送されているトレイ5の所定箇所に移載する際、ワーク4の搬送量が増加するとロボット7の作業範囲内に到達しているトレイ5にワーク4を収納するための空きが無くなる。このため、ロボット7がワーク4を保持した状態で、収納する空きのあるトレイ5が搬送されてくるのを待たなければならず、多くのワーク4がロボット7によって保持されずにロボット7の作業範囲内よりも下流側へ搬送されてワーク4のオーバーフローが発生する。
【0005】
オーバーフローしたワーク4については、手作業でトレイ5に詰めたり、再度ピックアップコンベア2の上流側へ運ぶといった手間を必要とし、作業効率を著しく低下させていた。
【0006】
特許文献1には、ワーク4の搬送方向におけるロボット7の上流側にカメラからなる1台のセンサ6を配設し、センサ6が撮影または検知したワーク4の映像をもとに、上流側のロボット7が搬送されてきた複数のワーク4の一部を保持し、下流側のロボット7が上流側のロボット7によって保持されずに通過されてきた残りのワーク4を保持するようにコントローラ8で上流側のロボット7と下流側のロボット7に適切にワーク4を分配して移載作業を制御することが開示されている。
【0007】
しかし、特許文献1の方法では、トレイ5にワーク4を移載するための空きが無い場合、ワーク4を搬送するピックアップコンベア2を一時的に停止させなければならず、ピックアップコンベア2を停止させることで、さらにピックアップコンベア2上のワーク4の搬送量の増加や搬送ピッチのバラツキを引き起こしてしまう。
【0008】
また、従来のワーク搬送システム1は、ピックアップコンベア2とプレイスコンベア3とが並列に配置され、ワーク4とトレイ5とを同方向へ搬送するシステムであるため、ワーク4をピックアップコンベア2に供給するワーク供給装置A2と、トレイ5をプレイスコンベア3に供給するトレイ供給装置A3とを並列に配置しなければならず、作業スペースに対する装置の設置関係が悪くなったり、移載後にトレイ5を包装する包装機等の梱包装置B3を設置するスペースが確保できず、作業効率が低下する等の問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平8−336784号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
そこで、本発明では、ワークをトレイへ移載するワーク移載システムにおいて、ランダム搬送または整列搬送されるワークの搬送量の増加や搬送ピッチのバラツキに関係なく、プレイスコンベア上のトレイへワークを効率よく移載して、ワークのオーバーフローが発生しないワーク移載システムを提供すると共に、効率のよい移載作業が可能なワーク移載システムおよび作業スペースを有効利用可能なワーク移載システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
前記課題を解決するための第1のワーク移載システムは、ワークを搬送するピックアップコンベアと、前記ワークを載置するためのトレイを搬送するプレイスコンベアと、前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、複数台の前記ロボットが、前記ワークの搬送方向に沿うように配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とする。
【0012】
第2のワーク移載システムは、前記ワークと前記トレイとが、並列で逆方向に搬送されることを特徴とする。
【0013】
第3のワーク移載システムは、前記プレイスコンベアが2台以上であることを特徴とする。
【0014】
第4のワーク移載システムは、2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されていることを特徴とする。
【0015】
第5のワーク移載システムは、複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されていることを特徴とする。
【0016】
第6のワーク移載システムは、複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍に、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されていることを特徴とする。
【0017】
前記課題を解決するための第7のワーク移載システムは、ワークを搬送するピックアップコンベアと、前記ワークを載置するトレイを搬送するプレイスコンベアと、前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、前記ピックアップコンベアと前記プレイスコンベアとが、相互に搬送方向が直交するように配設され、前記ピックアップコンベアと前記プレイスコンベアとが交差する部分には、前記ロボットが配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とする。
【0018】
第8のワーク移載システムは、前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されていることを特徴とする。
【0019】
第9のワーク移載システムは、前記ピックアップコンベアには、前記ワークの搬送方向における下流側から上流側へ前記ワークを還流するリターンコンベアが配設されていることを特徴とする。
【0020】
第10のワーク移載システムは、前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍に、前記ワークを仮置きするバッファコンベアが配設されていることを特徴とする。
【0021】
第11のワーク移載システムは、前記ピックアップコンベアが、前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアであることを特徴とする。
【発明の効果】
【0022】
本発明の第1のワーク移載システムによれば、複数台の前記ロボットが前記ワークの搬送方向に沿うように配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されることにより、前記ワークが前記ロボットの作業範囲内に搬送される前に、前記ワークの位置、形状および数量を検知することができるとともに、前記トレイの数量および空きも検知することができるので、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加した場合においても、前記センサからの情報に応じて前記コントローラによって前記プレイスコンベアの搬送速度を速くすると共に、その搬送速度に最適な前記ロボットの動作を決定することができ、オーバーフローの発生を防止することができる。
【0023】
本発明の第2のワーク移載システムによれば、前記ワークの搬送方向と前記トレイの搬送方向とを並列で逆方向とすることにより、前記ワークの搬送方向下流側において、空の前記トレイに確実に前記ワークを移載することができるので、オーバーフローの発生を防止することができる。
【0024】
本発明の第3のワーク移載システムによれば、前記プレイスコンベアを2台もしくはそれ以上とすることにより、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加して、1台目の前記プレイスコンベア上の前記トレイに前記ワークを移載する空きが確保できない場合においても、2台目もしくはそれ以降の前記プレイスコンベア上の前記トレイに前記ワークを移載することで、オーバーフローの発生を防止することができる。
【0025】
本発明の第4のワーク移載システムによれば、2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されることにより、前記ワークの移載に要する前記ロボットの移動距離を増加させることなく2台目の前記プレイスコンベアに対しても移載作業を行うことができるので、作業効率を低下させることなくオーバーフローの発生を防止することができる。
【0026】
本発明の第5のワーク移載システムによれば、複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されることにより、前記ロボットに分配された作業に応じて前記プレイスコンベアの搬送速度を調整することができる。これにより、前記ワークの搬送方向における下流側においても確実に前記トレイの空きを確保して効率のよい移載作業を行えるので、前記ワークのオーバーフローの発生を防止することができる。
【0027】
本発明の第6のワーク移載システムによれば、複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍に、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されることにより、充填済みの前記トレイが前記プレイスコンベア上に停滞することがなく、前記トレイの供給効率を良くして、オーバーフローの発生を防止することができる。
【0028】
本発明の第7のワーク移載システムによれば、前記ピックアップコンベアと前記プレイスコンベアとが直交して配設され、前記ピックアップコンベアと前記プレイスコンベアとが交差する部分に前記ロボットが配設されることにより、前記ロボットが前記ワークを保持してから解放するまでの移動距離を短くでき、前記ワークを前記トレイへ移載する作業効率を高めることができる。
【0029】
また、前記センサを前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設することにより、前記ワークの供給量が急激に増加した場合においても、前記ロボットが配設された位置に前記ワークおよび空きのある前記トレイが到達する前に、前記ワークの位置、形状および数量を検知することができるとともに、前記トレイの数量および空きも検知することができるので、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加した場合においても、前記センサからの情報に応じて前記コントローラによって前記プレイスコンベアの搬送速度を速くすると共に、その搬送速度に最適な前記ロボットの動作を決定することができ、オーバーフローの発生を防止することができる。
【0030】
本発明の第8のワーク移載システムによれば、前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されることにより、前記ワークの供給量が急激に増加して、1台目の前記プレイスコンベア上の前記トレイに前記ワークを移載する空きが確保できない場合においても、2台目もしくはそれ以降の前記プレイスコンベア上の前記トレイに移載することでオーバーフローの発生を防止することができる。
【0031】
本発明の第9のワーク移載システムによれば、前記ピックアップコンベアに、前記ワークの搬送方向における下流から上流へ前記ワークを還流するリターンコンベアが配設されることにより、前記トレイに移載されずに下流に搬送された前記ワークを再び上流へ戻すことができるので、オーバーフローの発生を防止することができる。
【0032】
本発明の第10のワーク移載システムによれば、前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍に、前記ワークを仮置きするバッファコンベアが配設されることにより、前記ワークの供給量が急激に増加して、前記トレイに移載しきれずに前記ワークが前記ピックアップコンベア上に残ってしまう場合であっても、前記ピックアップコンベア上に残った前記ワークを前記バッファコンベアに仮置きすることで、オーバーフローの発生を防止することができる。
【0033】
本発明の第11のワーク移載システムによれば、前記ピックアップコンベアが前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアとされるので、前記ワークの搬送ピッチのバラツキの発生を防止することができ、前記ロボットが保持できずに下流側に搬送されて前記ワークがオーバーフローすることを防止することができる。
【図面の簡単な説明】
【0034】
【図1】a、bは本発明に係るワーク移載システムの第1の実施形態の概略平面図
【図2】a、bは本発明に係るワーク移載システムの第2の実施形態の概略平面図
【図3】a、bは本発明に係るワーク移載システムの第3の実施形態の概略平面図
【図4】a、bは本発明に係るワーク移載システムの第4の実施形態の概略平面図
【図5】a、bは本発明に係るワーク移載システムの第5の実施形態の概略平面図
【図6】a、bは本発明に係るワーク移載システムの第6の実施形態の概略平面図
【図7】本発明に係るワーク移載システムの第7の実施形態の概略平面図
【図8】従来のワーク移載システムの概略平面図
【発明を実施するための形態】
【0035】
本発明のワーク移載システムを図1から図6にそれぞれ図示した実施形態により説明する。なお、図中における矢印は、コンベアの搬送方向を示している。
【0036】
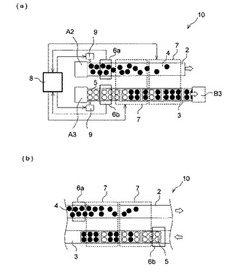
本発明のワーク移載システム10は、図1(a)に示すように、ワーク4を定速でランダム搬送または整列搬送するピックアップコンベア2と、ピックアップコンベア2と並列で配置され、カップや容器などのトレイ5を変速で搬送するプレイスコンベア3と、ワーク4を保持すると共に保持したワーク4を解放することによりトレイ5に移載するマニピュレータを備え、このマニピュレータを三次元的に可動とする例えば6軸多関節ロボット7と、画像センサ、3D認識センサ、光電センサ、距離センサあるいは超音波センサなどからなるセンサ6と、これら全ての動作を制御するコントローラ8とを有している。
【0037】
なお、ピックアップコンベア2およびプレイスコンベア3は、それぞれベルトコンベアとされており、個別のモータ9により搬送速度を可変駆動されるようになっている。さらに、プレイスコンベア3によって搬送されるものは、トレイ5に限らずカートンや箱、ケースなどのワーク4を載置可能なものであればいかなるものでもよい。
【0038】
これら全ての動作は、コントローラ8としての例えばプログラマブルロジックコントローラ(PLC)によって制御されており、センサ6によって検知された情報を入力信号としてこの制御が行われるようになっている。PLCからなるコントローラ8に対して、センサ6からワーク4の搬送量が閾値よりも多くなったことを示す信号が入力されると、プレイスコンベア3の搬送速度を速くする信号が出力されるとともに、ロボット7に対するワーク4の振りわけの分配比率を変更するなどの制御が行われる。
【0039】
本発明のワーク移載システムの第1の実施形態である第1のワーク移載システム10について説明する。
【0040】
第1のワーク移載システム10は、図1(a)に示すように、並列に配設されたピックアップコンベア2とプレイスコンベア3とを有しており、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放することによりトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0041】
ロボット7は、ワーク4の搬送方向に沿うようにピックアップコンベア2の近傍に複数台配設され、ピックアップコンベア2上を搬送されるワーク4を保持および解放することによりトレイ5の所定箇所にワーク4を移載する。
【0042】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0043】
このような構成からなる、第1のワーク移載システム10における移載動作を説明する。
【0044】
まず、同方向に搬送されるワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、トレイ5の空きが確保できるようにプレイスコンベア3の搬送速度を決定する。
【0045】
対象ワーク4がロボット7の作業範囲内に搬送されてくると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0046】
このような構成および作用の、第1のワーク移載システム10とすることにより、ワーク4およびトレイ5がロボット7の作業範囲内に搬送される前に予めその数量や空きの有無などを検知することができるので、搬送されてくるワーク4の数量が増加した場合には、プレイスコンベア3の搬送速度を速くして、トレイ5の供給を良くすることにより、確実にワーク4をトレイ5へ移載するようにしてワーク4のオーバーフローの発生を防止することができる。
【0047】
また、第1のワーク移載システムの動作において、図1(b)に示すように、ワーク4の搬送方向とトレイ5の搬送方向とを逆方向としてもよく、このように搬送方向を相互に逆方向とすることにより、ワーク4の搬送方向における下流側においても、ワーク4を移載するトレイ5の空きを確保することができるので、移載仕切れなかったワーク4をワーク4の搬送方向における下流側で確実にトレイ5へ移載してワーク4のオーバーフローの発生を防止することができる。
【0048】
本発明のワーク移載システムの第2の実施形態である第2のワーク移載システム20について説明する。
【0049】
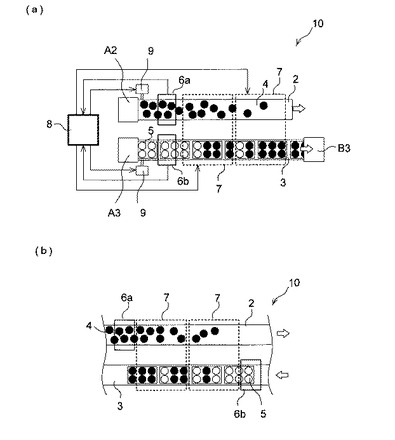
第2のワーク移載システム20においては、図2(a)に示すように、1台のピックアップコンベア2に対して並列に2台もしくはそれ以上のプレイスコンベア3が配設され、ピックアップコンベア2とプレイスコンベア3の上方にワーク4を保持および解放することによりトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0050】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向において最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0051】
なお、これらのピックアップコンベア2とプレイスコンベア3およびロボット7はコントローラ8によって制御されている。
【0052】
このような構成からなる、第2のワーク移載システム20における移載動作を説明する。
【0053】
まず、搬送されているワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aおよびトレイ用センサ6bを用いて検知する。検出されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、移載するプレイスコンベア3を決定する。
【0054】
この時、ワーク4の搬送方向およびトレイ5の搬送方向は、同方向もしくは逆方向のどちらでもよく、2台もしくはそれ以上のプレイスコンベア3はそれぞれ異なる搬送方向でもよい。
【0055】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、1台目のプレイスコンベア3上の決められたトレイ5への移載を行う。
【0056】
この時、1台目のプレイスコンベア3上のトレイ5に空きが無くなった場合には、2台目のプレイスコンベア3上のトレイ5へワーク4の移載を行う。
【0057】
このような構成および作用の、第2のワーク移載システム20とすることにより、ワーク4の供給量が急激に増加して1台目のプレイスコンベア3上のトレイ5ではワーク4を移載しきれない場合においても、2台目のプレイスコンベア3上を搬送されているトレイ5へ移載することができるので、ワーク4のオーバーフローの発生を防止することができる。
【0058】
また、第2のワーク移載システムにおいて、図2(b)に示すように、ピックアップコンベア2の両側をプレイスコンベア3で挟むように並列に配設してもよく、ピックアップコンベア2の両側にプレイスコンベア3を配設することにより、両側のプレイスコンベア3上のトレイ5に対して、ピックアップコンベア2から等しい移動距離でワーク4を移載することができるので、トレイ5の供給量が2倍となり、ピックアップコンベア2上のワーク4の搬送量が増加した場合においても、作業効率を低下させることなくワーク4のオーバーフローの発生を防止することができる。
【0059】
さらに、ピックアップコンベア2の両側にプレイスコンベア3を配設することにより、両側のプレイスコンベア3に対して等しくワーク4を分配して移載する方法やどちらか一方のプレイスコンベア3に優先して移載した後に、他方のプレイスコンベア3へ移載する方法など、コントローラ8からロボット7への指令の幅が広がることで、ワーク4に対して最適な分配を行うことができ、ワーク4のオーバーフローの発生を防止することができる。
【0060】
本発明のワーク移載システムの第3の実施形態である第3のワーク移載システム30について説明する。
【0061】
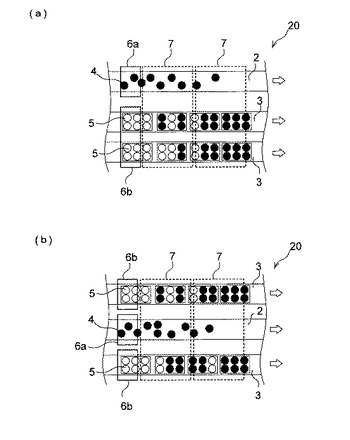
第3のワーク移載システム30においては、図3(a)に示すように、ピックアップコンベア2の上方に配設されたマニピュレータを備えた複数のロボット7の近傍にそれぞれプレイスコンベア3が配設されている。
【0062】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0063】
この時、ロボットの近傍にそれぞれ配設されたプレイスコンベア3の搬送速度およびロボット7の動作は、ワーク用センサ6aとトレイ用センサ6bの検知した情報に基づいて、コントローラ8によって制御されている。
【0064】
なお、プレイスコンベア3に対するトレイ5の供給は、独立して行われる構成に限らず、図示しないトレイ供給用コンベア等を配設して、このトレイ供給用コンベアからそれぞれのプレイスコンベア3に対してトレイ5が供給されるように構成してもよい。
【0065】
このような構成からなる、第3のワーク移載システム30における移載動作を説明する。
【0066】
まず、ワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をワーク用センサ6aおよびトレイ用センサ6bを用いてそれぞれ検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、各プレイスコンベア3に対して搬送速度を決定する。
【0067】
対象ワーク4がロボット7の作業範囲内に搬送されてくると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、ロボット7ごとに配設されたプレイスコンベア3上のトレイ5への移載を行う。
【0068】
この時、ワーク4の搬送方向とトレイ5の搬送方向とは、同方向もしくは逆方向のどちらでもよく、ロボット7ごとに配設されたプレイスコンベア3の搬送方向もそれぞれ異なる方向でもよい。
【0069】
このような構成および作用の、第3のワーク移載システム30とすることにより、ロボット7の移載作業に対して独立してトレイ5の供給速度を調整することができるので、ピックアップコンベア2上のワーク4の搬送量が急激に増加した場合においても、ロボット7ごとの作業状況に応じてトレイ5を供給し、確実にトレイ5の空きを確保することで、ワーク4のオーバーフローの発生を防止することができる。
【0070】
また、複数台のプレイスコンベア3に対して、図3(b)に示すように、ワーク4を移載され充填された後の充填済みのトレイ5を搬送するための搬送コンベア33を下面に配設してもよく、充填済みのトレイ5を下面に配設された搬送コンベア33上へ落下させることにより、プレイスコンベア3上に充填済みのトレイ5が停滞することがなく、プレイスコンベア3上へのトレイ5の供給をスムーズに行えるので、ワーク4の移載効率が良くなり、ワーク4のオーバーフローの発生を防止することができる。
【0071】
なお、本実施形態においては、搬送コンベア33がプレイスコンベア3の下面に配設された場合の説明を行ったが、搬送コンベア33はプレイスコンベア3と並列でもよく、搬送コンベア33の配設位置は搬送物や作業スペースに応じて適宜変更される。
【0072】
本発明のワーク移載システムの第4の実施形態である第4のワーク移載システム40について説明する。
【0073】
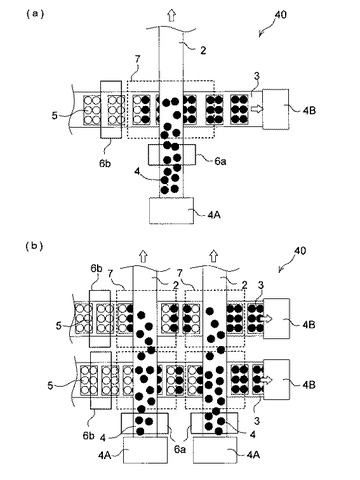
第4のワーク移載システム40においては、図4(a)に示すように、プレイスコンベア3の上面にピックアップコンベア2が相互に搬送方向が直交するように配設され、ピックアップコンベア2とプレイスコンベア3とが交差する部分の上方には、ワーク4を保持および解放してトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0074】
この時、ピックアップコンベア2と、このピックアップコンベア2の上方に位置するプレイスコンベア3との搬送方向が相互に直交するようにピックアップコンベア2とプレイスコンベア3とを配設してもよい。
【0075】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0076】
このような構成からなる、第4のワーク移載システム40における移載動作を説明する。
【0077】
まず、直交して搬送されるワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をワーク用センサ6aおよびトレイ用センサ6bを用いてそれぞれ検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対して保持するワーク4をそれぞれ配分すると共に、プレイスコンベア3の搬送速度を決定する。
【0078】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0079】
このような構成および作用の、第4のワーク移載システム40とすることにより、ロボット7がワーク4を保持してからトレイ5までの移送するのに要する移動距離を短縮することができるので、移載効率が良くなり、ワーク4のオーバーフローの発生を防止することができる。
【0080】
また、第4のワーク移載システム40によれば、ピックアップコンベア2およびプレイスコンベア3の上流または下流に配設される製造機械4Aや包装機械4B等を隣り合わせに配置する必要がないので、作業スペースに対する装置の配置性が良くなり、作業スペースを有効利用することができる。
【0081】
さらに、図4(b)に示すように、2台もしくはそれ以上のプレイスコンベア3と2台もしくはそれ以上のピックアップコンベア2とをそれぞれの搬送方向を直交させて配設してもよく、ピックアップコンベア2とプレイスコンベア3とを直交させて配設しているので、ピックアップコンベア2からプレイスコンベア3までの距離を延長させることなくプレイスコンベア3の増設が可能となり、作業効率を低下させることなく複数台のプレイスコンベア3上のトレイ5へワーク4を移載して、ワーク4のオーバーフローの発生を防止することができる。
【0082】
なお、2台もしくはそれ以上のプレイスコンベア3の搬送方向および搬送速度は、適宜変更することができる。
【0083】
本発明のワーク移載システムの第5の実施形態である第5のワーク移載システム50について説明する。
【0084】
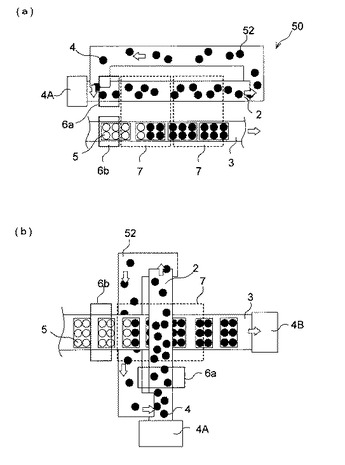
第5のワーク移載システム50においては、図5(a)に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放することによりトレイ5に移載するロボット7が複数台配設されている。
【0085】
ピックアップコンベア2の近傍には、ワーク4をピックアップコンベア2の下流側からピックアップコンベア2の上流側に還流するリターンコンベア52が配設されている。
【0086】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0087】
ここで、ピックアップコンベア2とプレイスコンベア3とは、図5(b)に示すように、相互に搬送方向が直交するように配置されてもよい。
【0088】
このような構成からなる、第5のワーク移載システム50における移載動作を説明する。
【0089】
まず、ワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分する。
【0090】
対象のワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0091】
この時、ロボット7の作業範囲内から外れて下流側に搬送されていたワーク4は、一旦、図示しないホッパー等に収容された後、ピックアップコンベア2の近傍に配設されているリターンコンベア52に適宜供給されることにより、ピックアップコンベア2の上流側へ還流される。
【0092】
このような構成および作用の、第5のワーク移載システム50とすることにより、ロボット7の作業範囲内から外れてしまったワーク4を再度ピックアップコンベア2の上流側に還流して、ロボット7の作業範囲内に容易に搬送することができるので、ワーク4のオーバーフローの発生を防止することができる。
【0093】
本発明のワーク移載システムの第6の実施形態である第6のワーク移載システム60について説明する。
【0094】
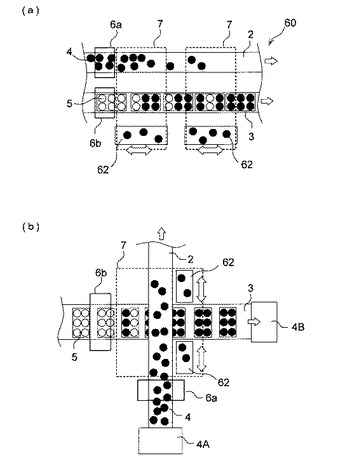
第6のワーク移載システム60においては、図6に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放してトレイ5へ移載するロボット7が複数台配設されている。
【0095】
そして、プレイスコンベア3の近傍には、搬送されてきたワーク4を仮置きするバッファコンベア62が配設されている。
【0096】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0097】
ここで、ピックアップコンベア2とプレイスコンベア3とは、相互に搬送方向が直交するように配置してもよい。
【0098】
このような構成からなる、第6のワーク移載システム60における移載動作を説明する。
【0099】
まず、搬送されてくるワーク4の位置、形状と数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分する。
【0100】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータでそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0101】
さらに、トレイ5への移載作業を行うと同時に、ロボット7の作業範囲内において、トレイ5へ移載しきれずにピックアップコンベア2上に残ったワーク4をバッファコンベア62に移載することで、仮置きする。
【0102】
仮置きされたワーク4は、プレイスコンベア3上を搬送されてくるトレイ5に空きがある場合に、トレイ5へ移載される。
【0103】
この時、バッファコンベア62は、ロボット7の動作に連動して移動可能としてもよい。
【0104】
このような構成の、第6のワーク移載システム60とすることにより、ピックアップコンベア2上のワーク4の搬送量が急激に増加してトレイ5に移載できないワーク4が発生した場合においても、トレイ5への移載作業と同時に移載しきれずに残ったワーク4をバッファコンベア62に一旦、仮置きすることで、ワーク4のオーバーフローの発生を防止することができる。
【0105】
また、バッファコンベア62は、プレイスコンベア3の近傍に限らず、ピックアップコンベア2の近傍に配設されてもよい。
【0106】
本発明のワーク移載システムの第7の実施形態である第7のワーク移載システム70について説明する。
【0107】
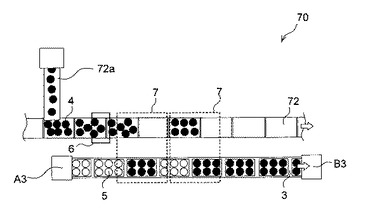
第7のワーク移載システム70においては、図7に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放してトレイ5へ移載するロボット7が複数台配設されている。
【0108】
この時、ワーク4を搬送するためのピックアップコンベア2が、ワーク4を所定個数ずつ所定のピッチで搬送可能なバケットコンベア72からなっている。
【0109】
また、バケットコンベア72の近傍には、ワーク4を1列で搬送するバケットコンベア72に対してワーク4を供給するワーク供給コンベア72aが配設されている。
【0110】
また、センサ6は、ワーク4の搬送方向におけるロボット7の上流側に配設されるワーク用センサ6aと、トレイ5の搬送方向におけるロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0111】
ここで、バケットコンベア72とプレイスコンベア3とは、相互に搬送方向が直交するように配置してもよい。
【0112】
このような構成からなる、第7のワーク移載システム70における移載動作を説明する。
【0113】
まず、ワーク供給コンベア72a上を1列で搬送されてきたワーク4は、バケットコンベア72の1個目のバケットに投入される。1個目のバケットコンベア72は、予め設定されている個数のワーク4が1個目のバケットに投入されたことを検知すると、バケットが1ピッチ下流側へ搬送され、2個目のバケットに対するワーク4の供給が開始される。このようなワーク4の供給動作を連続して行い、バケットコンベア72によってワーク4を所定個数ずつ所定ピッチで搬送を行う。
【0114】
ワーク用センサ6aおよびトレイ用センサ6bによって、バケットコンベア72上を搬送されてくるワーク4の位置および形状とプレイスコンベア3上のトレイ5の形状、数量および空きの有無とを検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、ロボット7に対して保持するワーク4を決定する。
【0115】
対象のワーク4がロボット7の作業範囲内に搬送されると、ロボット7がワーク4をマニピュレータでそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0116】
このような構成の、第7のワーク移載システム70とすることにより、ワーク4の搬送量および搬送ピッチのバラツキを防止してワーク4のオーバーフローの発生を防止することができるとともに、予めワーク4を必要な個数ずつ搬送することができるので、大量のワーク4を素早く処理して移載の作業効率を良くすることができる。
【0117】
また、バケットコンベア72に対してリターンコンベア52およびバッファコンベア62を配設することで、よりワーク4のオーバーフローの発生を防止できるとともに、効率の良い移載作業を実現することができる。
【0118】
なお、本発明のワーク移載システムは上記各実施形態に限定するものではなく、適宜、第1のワーク移載システムの構成乃至第7のワーク移載システムの構成を組み合わせることおよび適宜変更することが可能である。
【符号の説明】
【0119】
1 ワーク移載システム
2 ピックアップコンベア
3 プレイスコンベア
4 ワーク
5 トレイ
6 センサ
6a ワーク用センサ
6b トレイ用センサ
7 ロボット
8 コントローラ
9 モータ
10 第1のワーク移載システム
20 第2のワーク移載システム
30 第3のワーク移載システム
33 搬送コンベア
40 第4のワーク移載システム
4A 製造機械
4B 包装機械
50 第5のワーク移載システム
52 リターンコンベア
60 第6のワーク移載システム
62 バッファコンベア
A2 ワーク供給装置
A3 トレイ供給装置
B3 梱包装置
70 第7のワーク移載システム
72 バケットコンベア
72a ワーク供給コンベア
【技術分野】
【0001】
本発明は、ピックアップコンベア上を搬送されているワークをマニピュレータを備えたロボットで保持および解放することにより、プレイスコンベア上を搬送されているトレイへ移載するワーク移載システムにおいて、ワークのオーバーフローの発生を回避すると共に、作業スペースをより有効に利用可能としたワーク移載システムに関する。
【背景技術】
【0002】
従来のワーク移載システム1は、図8に示すように、ワーク4を搬送するピックアップコンベア2と、トレイ5等の容器をワーク4と同方向に搬送し、ピックアップコンベア2と並列に配置されたプレイスコンベア3と、ワーク4を保持すると共に保持したワーク4を解放するマニピュレータとを備え、ピックアップコンベア2に沿って配置された複数台のロボット7と、これら一連の動作を制御するコントローラ8とを有し、コントローラ8によりロボット7の動作と、ピックアップコンベア2およびプレイスコンベア3の搬送速度とを制御することで、ロボット7でピックアップコンベア2上のワーク4を保持し、保持したワーク4をプレイスコンベア3上のトレイ5内の所定位置において解放して移載するシステムである。
【0003】
ワーク移載システム1におけるワーク4は、ピックアップコンベア2上にランダムもしくは整列されて搬送される。ワーク4をランダムに搬送するランダム搬送では、ワーク4を所定の方向や所定の搬送ピッチに整列させる必要がなく、コスト的に優位な搬送方法である反面、ピックアップコンベア2上を搬送されるワーク4の搬送量を一定に保持することが難しく、急激にワーク4の搬送量が増減することが知られている。また、ワーク4を搬送方向に対して平行もしくは垂直など所定の方向に整列させて搬送する整列搬送では、ピックアップコンベア2上におけるワーク4の搬送量が急激に増加することを防げるものの、ワーク4の搬送ピッチのバラツキやワーク4が部分的に抜け落ちることが知られている。
【0004】
また、ワーク4をプレイスコンベア3上を搬送されているトレイ5の所定箇所に移載する際、ワーク4の搬送量が増加するとロボット7の作業範囲内に到達しているトレイ5にワーク4を収納するための空きが無くなる。このため、ロボット7がワーク4を保持した状態で、収納する空きのあるトレイ5が搬送されてくるのを待たなければならず、多くのワーク4がロボット7によって保持されずにロボット7の作業範囲内よりも下流側へ搬送されてワーク4のオーバーフローが発生する。
【0005】
オーバーフローしたワーク4については、手作業でトレイ5に詰めたり、再度ピックアップコンベア2の上流側へ運ぶといった手間を必要とし、作業効率を著しく低下させていた。
【0006】
特許文献1には、ワーク4の搬送方向におけるロボット7の上流側にカメラからなる1台のセンサ6を配設し、センサ6が撮影または検知したワーク4の映像をもとに、上流側のロボット7が搬送されてきた複数のワーク4の一部を保持し、下流側のロボット7が上流側のロボット7によって保持されずに通過されてきた残りのワーク4を保持するようにコントローラ8で上流側のロボット7と下流側のロボット7に適切にワーク4を分配して移載作業を制御することが開示されている。
【0007】
しかし、特許文献1の方法では、トレイ5にワーク4を移載するための空きが無い場合、ワーク4を搬送するピックアップコンベア2を一時的に停止させなければならず、ピックアップコンベア2を停止させることで、さらにピックアップコンベア2上のワーク4の搬送量の増加や搬送ピッチのバラツキを引き起こしてしまう。
【0008】
また、従来のワーク搬送システム1は、ピックアップコンベア2とプレイスコンベア3とが並列に配置され、ワーク4とトレイ5とを同方向へ搬送するシステムであるため、ワーク4をピックアップコンベア2に供給するワーク供給装置A2と、トレイ5をプレイスコンベア3に供給するトレイ供給装置A3とを並列に配置しなければならず、作業スペースに対する装置の設置関係が悪くなったり、移載後にトレイ5を包装する包装機等の梱包装置B3を設置するスペースが確保できず、作業効率が低下する等の問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平8−336784号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
そこで、本発明では、ワークをトレイへ移載するワーク移載システムにおいて、ランダム搬送または整列搬送されるワークの搬送量の増加や搬送ピッチのバラツキに関係なく、プレイスコンベア上のトレイへワークを効率よく移載して、ワークのオーバーフローが発生しないワーク移載システムを提供すると共に、効率のよい移載作業が可能なワーク移載システムおよび作業スペースを有効利用可能なワーク移載システムを提供することを目的とする。
【課題を解決するための手段】
【0011】
前記課題を解決するための第1のワーク移載システムは、ワークを搬送するピックアップコンベアと、前記ワークを載置するためのトレイを搬送するプレイスコンベアと、前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、複数台の前記ロボットが、前記ワークの搬送方向に沿うように配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とする。
【0012】
第2のワーク移載システムは、前記ワークと前記トレイとが、並列で逆方向に搬送されることを特徴とする。
【0013】
第3のワーク移載システムは、前記プレイスコンベアが2台以上であることを特徴とする。
【0014】
第4のワーク移載システムは、2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されていることを特徴とする。
【0015】
第5のワーク移載システムは、複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されていることを特徴とする。
【0016】
第6のワーク移載システムは、複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍に、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されていることを特徴とする。
【0017】
前記課題を解決するための第7のワーク移載システムは、ワークを搬送するピックアップコンベアと、前記ワークを載置するトレイを搬送するプレイスコンベアと、前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、前記ピックアップコンベアと前記プレイスコンベアとが、相互に搬送方向が直交するように配設され、前記ピックアップコンベアと前記プレイスコンベアとが交差する部分には、前記ロボットが配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とする。
【0018】
第8のワーク移載システムは、前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されていることを特徴とする。
【0019】
第9のワーク移載システムは、前記ピックアップコンベアには、前記ワークの搬送方向における下流側から上流側へ前記ワークを還流するリターンコンベアが配設されていることを特徴とする。
【0020】
第10のワーク移載システムは、前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍に、前記ワークを仮置きするバッファコンベアが配設されていることを特徴とする。
【0021】
第11のワーク移載システムは、前記ピックアップコンベアが、前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアであることを特徴とする。
【発明の効果】
【0022】
本発明の第1のワーク移載システムによれば、複数台の前記ロボットが前記ワークの搬送方向に沿うように配設され、前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されることにより、前記ワークが前記ロボットの作業範囲内に搬送される前に、前記ワークの位置、形状および数量を検知することができるとともに、前記トレイの数量および空きも検知することができるので、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加した場合においても、前記センサからの情報に応じて前記コントローラによって前記プレイスコンベアの搬送速度を速くすると共に、その搬送速度に最適な前記ロボットの動作を決定することができ、オーバーフローの発生を防止することができる。
【0023】
本発明の第2のワーク移載システムによれば、前記ワークの搬送方向と前記トレイの搬送方向とを並列で逆方向とすることにより、前記ワークの搬送方向下流側において、空の前記トレイに確実に前記ワークを移載することができるので、オーバーフローの発生を防止することができる。
【0024】
本発明の第3のワーク移載システムによれば、前記プレイスコンベアを2台もしくはそれ以上とすることにより、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加して、1台目の前記プレイスコンベア上の前記トレイに前記ワークを移載する空きが確保できない場合においても、2台目もしくはそれ以降の前記プレイスコンベア上の前記トレイに前記ワークを移載することで、オーバーフローの発生を防止することができる。
【0025】
本発明の第4のワーク移載システムによれば、2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されることにより、前記ワークの移載に要する前記ロボットの移動距離を増加させることなく2台目の前記プレイスコンベアに対しても移載作業を行うことができるので、作業効率を低下させることなくオーバーフローの発生を防止することができる。
【0026】
本発明の第5のワーク移載システムによれば、複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されることにより、前記ロボットに分配された作業に応じて前記プレイスコンベアの搬送速度を調整することができる。これにより、前記ワークの搬送方向における下流側においても確実に前記トレイの空きを確保して効率のよい移載作業を行えるので、前記ワークのオーバーフローの発生を防止することができる。
【0027】
本発明の第6のワーク移載システムによれば、複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍に、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されることにより、充填済みの前記トレイが前記プレイスコンベア上に停滞することがなく、前記トレイの供給効率を良くして、オーバーフローの発生を防止することができる。
【0028】
本発明の第7のワーク移載システムによれば、前記ピックアップコンベアと前記プレイスコンベアとが直交して配設され、前記ピックアップコンベアと前記プレイスコンベアとが交差する部分に前記ロボットが配設されることにより、前記ロボットが前記ワークを保持してから解放するまでの移動距離を短くでき、前記ワークを前記トレイへ移載する作業効率を高めることができる。
【0029】
また、前記センサを前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設することにより、前記ワークの供給量が急激に増加した場合においても、前記ロボットが配設された位置に前記ワークおよび空きのある前記トレイが到達する前に、前記ワークの位置、形状および数量を検知することができるとともに、前記トレイの数量および空きも検知することができるので、前記ピックアップコンベア上の前記ワークの搬送量が急激に増加した場合においても、前記センサからの情報に応じて前記コントローラによって前記プレイスコンベアの搬送速度を速くすると共に、その搬送速度に最適な前記ロボットの動作を決定することができ、オーバーフローの発生を防止することができる。
【0030】
本発明の第8のワーク移載システムによれば、前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されることにより、前記ワークの供給量が急激に増加して、1台目の前記プレイスコンベア上の前記トレイに前記ワークを移載する空きが確保できない場合においても、2台目もしくはそれ以降の前記プレイスコンベア上の前記トレイに移載することでオーバーフローの発生を防止することができる。
【0031】
本発明の第9のワーク移載システムによれば、前記ピックアップコンベアに、前記ワークの搬送方向における下流から上流へ前記ワークを還流するリターンコンベアが配設されることにより、前記トレイに移載されずに下流に搬送された前記ワークを再び上流へ戻すことができるので、オーバーフローの発生を防止することができる。
【0032】
本発明の第10のワーク移載システムによれば、前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍に、前記ワークを仮置きするバッファコンベアが配設されることにより、前記ワークの供給量が急激に増加して、前記トレイに移載しきれずに前記ワークが前記ピックアップコンベア上に残ってしまう場合であっても、前記ピックアップコンベア上に残った前記ワークを前記バッファコンベアに仮置きすることで、オーバーフローの発生を防止することができる。
【0033】
本発明の第11のワーク移載システムによれば、前記ピックアップコンベアが前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアとされるので、前記ワークの搬送ピッチのバラツキの発生を防止することができ、前記ロボットが保持できずに下流側に搬送されて前記ワークがオーバーフローすることを防止することができる。
【図面の簡単な説明】
【0034】
【図1】a、bは本発明に係るワーク移載システムの第1の実施形態の概略平面図
【図2】a、bは本発明に係るワーク移載システムの第2の実施形態の概略平面図
【図3】a、bは本発明に係るワーク移載システムの第3の実施形態の概略平面図
【図4】a、bは本発明に係るワーク移載システムの第4の実施形態の概略平面図
【図5】a、bは本発明に係るワーク移載システムの第5の実施形態の概略平面図
【図6】a、bは本発明に係るワーク移載システムの第6の実施形態の概略平面図
【図7】本発明に係るワーク移載システムの第7の実施形態の概略平面図
【図8】従来のワーク移載システムの概略平面図
【発明を実施するための形態】
【0035】
本発明のワーク移載システムを図1から図6にそれぞれ図示した実施形態により説明する。なお、図中における矢印は、コンベアの搬送方向を示している。
【0036】
本発明のワーク移載システム10は、図1(a)に示すように、ワーク4を定速でランダム搬送または整列搬送するピックアップコンベア2と、ピックアップコンベア2と並列で配置され、カップや容器などのトレイ5を変速で搬送するプレイスコンベア3と、ワーク4を保持すると共に保持したワーク4を解放することによりトレイ5に移載するマニピュレータを備え、このマニピュレータを三次元的に可動とする例えば6軸多関節ロボット7と、画像センサ、3D認識センサ、光電センサ、距離センサあるいは超音波センサなどからなるセンサ6と、これら全ての動作を制御するコントローラ8とを有している。
【0037】
なお、ピックアップコンベア2およびプレイスコンベア3は、それぞれベルトコンベアとされており、個別のモータ9により搬送速度を可変駆動されるようになっている。さらに、プレイスコンベア3によって搬送されるものは、トレイ5に限らずカートンや箱、ケースなどのワーク4を載置可能なものであればいかなるものでもよい。
【0038】
これら全ての動作は、コントローラ8としての例えばプログラマブルロジックコントローラ(PLC)によって制御されており、センサ6によって検知された情報を入力信号としてこの制御が行われるようになっている。PLCからなるコントローラ8に対して、センサ6からワーク4の搬送量が閾値よりも多くなったことを示す信号が入力されると、プレイスコンベア3の搬送速度を速くする信号が出力されるとともに、ロボット7に対するワーク4の振りわけの分配比率を変更するなどの制御が行われる。
【0039】
本発明のワーク移載システムの第1の実施形態である第1のワーク移載システム10について説明する。
【0040】
第1のワーク移載システム10は、図1(a)に示すように、並列に配設されたピックアップコンベア2とプレイスコンベア3とを有しており、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放することによりトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0041】
ロボット7は、ワーク4の搬送方向に沿うようにピックアップコンベア2の近傍に複数台配設され、ピックアップコンベア2上を搬送されるワーク4を保持および解放することによりトレイ5の所定箇所にワーク4を移載する。
【0042】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0043】
このような構成からなる、第1のワーク移載システム10における移載動作を説明する。
【0044】
まず、同方向に搬送されるワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、トレイ5の空きが確保できるようにプレイスコンベア3の搬送速度を決定する。
【0045】
対象ワーク4がロボット7の作業範囲内に搬送されてくると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0046】
このような構成および作用の、第1のワーク移載システム10とすることにより、ワーク4およびトレイ5がロボット7の作業範囲内に搬送される前に予めその数量や空きの有無などを検知することができるので、搬送されてくるワーク4の数量が増加した場合には、プレイスコンベア3の搬送速度を速くして、トレイ5の供給を良くすることにより、確実にワーク4をトレイ5へ移載するようにしてワーク4のオーバーフローの発生を防止することができる。
【0047】
また、第1のワーク移載システムの動作において、図1(b)に示すように、ワーク4の搬送方向とトレイ5の搬送方向とを逆方向としてもよく、このように搬送方向を相互に逆方向とすることにより、ワーク4の搬送方向における下流側においても、ワーク4を移載するトレイ5の空きを確保することができるので、移載仕切れなかったワーク4をワーク4の搬送方向における下流側で確実にトレイ5へ移載してワーク4のオーバーフローの発生を防止することができる。
【0048】
本発明のワーク移載システムの第2の実施形態である第2のワーク移載システム20について説明する。
【0049】
第2のワーク移載システム20においては、図2(a)に示すように、1台のピックアップコンベア2に対して並列に2台もしくはそれ以上のプレイスコンベア3が配設され、ピックアップコンベア2とプレイスコンベア3の上方にワーク4を保持および解放することによりトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0050】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向において最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0051】
なお、これらのピックアップコンベア2とプレイスコンベア3およびロボット7はコントローラ8によって制御されている。
【0052】
このような構成からなる、第2のワーク移載システム20における移載動作を説明する。
【0053】
まず、搬送されているワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aおよびトレイ用センサ6bを用いて検知する。検出されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、移載するプレイスコンベア3を決定する。
【0054】
この時、ワーク4の搬送方向およびトレイ5の搬送方向は、同方向もしくは逆方向のどちらでもよく、2台もしくはそれ以上のプレイスコンベア3はそれぞれ異なる搬送方向でもよい。
【0055】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、1台目のプレイスコンベア3上の決められたトレイ5への移載を行う。
【0056】
この時、1台目のプレイスコンベア3上のトレイ5に空きが無くなった場合には、2台目のプレイスコンベア3上のトレイ5へワーク4の移載を行う。
【0057】
このような構成および作用の、第2のワーク移載システム20とすることにより、ワーク4の供給量が急激に増加して1台目のプレイスコンベア3上のトレイ5ではワーク4を移載しきれない場合においても、2台目のプレイスコンベア3上を搬送されているトレイ5へ移載することができるので、ワーク4のオーバーフローの発生を防止することができる。
【0058】
また、第2のワーク移載システムにおいて、図2(b)に示すように、ピックアップコンベア2の両側をプレイスコンベア3で挟むように並列に配設してもよく、ピックアップコンベア2の両側にプレイスコンベア3を配設することにより、両側のプレイスコンベア3上のトレイ5に対して、ピックアップコンベア2から等しい移動距離でワーク4を移載することができるので、トレイ5の供給量が2倍となり、ピックアップコンベア2上のワーク4の搬送量が増加した場合においても、作業効率を低下させることなくワーク4のオーバーフローの発生を防止することができる。
【0059】
さらに、ピックアップコンベア2の両側にプレイスコンベア3を配設することにより、両側のプレイスコンベア3に対して等しくワーク4を分配して移載する方法やどちらか一方のプレイスコンベア3に優先して移載した後に、他方のプレイスコンベア3へ移載する方法など、コントローラ8からロボット7への指令の幅が広がることで、ワーク4に対して最適な分配を行うことができ、ワーク4のオーバーフローの発生を防止することができる。
【0060】
本発明のワーク移載システムの第3の実施形態である第3のワーク移載システム30について説明する。
【0061】
第3のワーク移載システム30においては、図3(a)に示すように、ピックアップコンベア2の上方に配設されたマニピュレータを備えた複数のロボット7の近傍にそれぞれプレイスコンベア3が配設されている。
【0062】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0063】
この時、ロボットの近傍にそれぞれ配設されたプレイスコンベア3の搬送速度およびロボット7の動作は、ワーク用センサ6aとトレイ用センサ6bの検知した情報に基づいて、コントローラ8によって制御されている。
【0064】
なお、プレイスコンベア3に対するトレイ5の供給は、独立して行われる構成に限らず、図示しないトレイ供給用コンベア等を配設して、このトレイ供給用コンベアからそれぞれのプレイスコンベア3に対してトレイ5が供給されるように構成してもよい。
【0065】
このような構成からなる、第3のワーク移載システム30における移載動作を説明する。
【0066】
まず、ワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をワーク用センサ6aおよびトレイ用センサ6bを用いてそれぞれ検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分すると共に、各プレイスコンベア3に対して搬送速度を決定する。
【0067】
対象ワーク4がロボット7の作業範囲内に搬送されてくると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、ロボット7ごとに配設されたプレイスコンベア3上のトレイ5への移載を行う。
【0068】
この時、ワーク4の搬送方向とトレイ5の搬送方向とは、同方向もしくは逆方向のどちらでもよく、ロボット7ごとに配設されたプレイスコンベア3の搬送方向もそれぞれ異なる方向でもよい。
【0069】
このような構成および作用の、第3のワーク移載システム30とすることにより、ロボット7の移載作業に対して独立してトレイ5の供給速度を調整することができるので、ピックアップコンベア2上のワーク4の搬送量が急激に増加した場合においても、ロボット7ごとの作業状況に応じてトレイ5を供給し、確実にトレイ5の空きを確保することで、ワーク4のオーバーフローの発生を防止することができる。
【0070】
また、複数台のプレイスコンベア3に対して、図3(b)に示すように、ワーク4を移載され充填された後の充填済みのトレイ5を搬送するための搬送コンベア33を下面に配設してもよく、充填済みのトレイ5を下面に配設された搬送コンベア33上へ落下させることにより、プレイスコンベア3上に充填済みのトレイ5が停滞することがなく、プレイスコンベア3上へのトレイ5の供給をスムーズに行えるので、ワーク4の移載効率が良くなり、ワーク4のオーバーフローの発生を防止することができる。
【0071】
なお、本実施形態においては、搬送コンベア33がプレイスコンベア3の下面に配設された場合の説明を行ったが、搬送コンベア33はプレイスコンベア3と並列でもよく、搬送コンベア33の配設位置は搬送物や作業スペースに応じて適宜変更される。
【0072】
本発明のワーク移載システムの第4の実施形態である第4のワーク移載システム40について説明する。
【0073】
第4のワーク移載システム40においては、図4(a)に示すように、プレイスコンベア3の上面にピックアップコンベア2が相互に搬送方向が直交するように配設され、ピックアップコンベア2とプレイスコンベア3とが交差する部分の上方には、ワーク4を保持および解放してトレイ5へ移載するマニピュレータを備えたロボット7が複数台配設されている。
【0074】
この時、ピックアップコンベア2と、このピックアップコンベア2の上方に位置するプレイスコンベア3との搬送方向が相互に直交するようにピックアップコンベア2とプレイスコンベア3とを配設してもよい。
【0075】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0076】
このような構成からなる、第4のワーク移載システム40における移載動作を説明する。
【0077】
まず、直交して搬送されるワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をワーク用センサ6aおよびトレイ用センサ6bを用いてそれぞれ検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対して保持するワーク4をそれぞれ配分すると共に、プレイスコンベア3の搬送速度を決定する。
【0078】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0079】
このような構成および作用の、第4のワーク移載システム40とすることにより、ロボット7がワーク4を保持してからトレイ5までの移送するのに要する移動距離を短縮することができるので、移載効率が良くなり、ワーク4のオーバーフローの発生を防止することができる。
【0080】
また、第4のワーク移載システム40によれば、ピックアップコンベア2およびプレイスコンベア3の上流または下流に配設される製造機械4Aや包装機械4B等を隣り合わせに配置する必要がないので、作業スペースに対する装置の配置性が良くなり、作業スペースを有効利用することができる。
【0081】
さらに、図4(b)に示すように、2台もしくはそれ以上のプレイスコンベア3と2台もしくはそれ以上のピックアップコンベア2とをそれぞれの搬送方向を直交させて配設してもよく、ピックアップコンベア2とプレイスコンベア3とを直交させて配設しているので、ピックアップコンベア2からプレイスコンベア3までの距離を延長させることなくプレイスコンベア3の増設が可能となり、作業効率を低下させることなく複数台のプレイスコンベア3上のトレイ5へワーク4を移載して、ワーク4のオーバーフローの発生を防止することができる。
【0082】
なお、2台もしくはそれ以上のプレイスコンベア3の搬送方向および搬送速度は、適宜変更することができる。
【0083】
本発明のワーク移載システムの第5の実施形態である第5のワーク移載システム50について説明する。
【0084】
第5のワーク移載システム50においては、図5(a)に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放することによりトレイ5に移載するロボット7が複数台配設されている。
【0085】
ピックアップコンベア2の近傍には、ワーク4をピックアップコンベア2の下流側からピックアップコンベア2の上流側に還流するリターンコンベア52が配設されている。
【0086】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0087】
ここで、ピックアップコンベア2とプレイスコンベア3とは、図5(b)に示すように、相互に搬送方向が直交するように配置されてもよい。
【0088】
このような構成からなる、第5のワーク移載システム50における移載動作を説明する。
【0089】
まず、ワーク4の位置、形状および数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分する。
【0090】
対象のワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータによってそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0091】
この時、ロボット7の作業範囲内から外れて下流側に搬送されていたワーク4は、一旦、図示しないホッパー等に収容された後、ピックアップコンベア2の近傍に配設されているリターンコンベア52に適宜供給されることにより、ピックアップコンベア2の上流側へ還流される。
【0092】
このような構成および作用の、第5のワーク移載システム50とすることにより、ロボット7の作業範囲内から外れてしまったワーク4を再度ピックアップコンベア2の上流側に還流して、ロボット7の作業範囲内に容易に搬送することができるので、ワーク4のオーバーフローの発生を防止することができる。
【0093】
本発明のワーク移載システムの第6の実施形態である第6のワーク移載システム60について説明する。
【0094】
第6のワーク移載システム60においては、図6に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放してトレイ5へ移載するロボット7が複数台配設されている。
【0095】
そして、プレイスコンベア3の近傍には、搬送されてきたワーク4を仮置きするバッファコンベア62が配設されている。
【0096】
また、センサ6は、ロボット7の配置方向においてワーク4の搬送方向の最も上流側に配置されたロボット7の上流側に配設されるワーク用センサ6aと、ロボット7の配置方向においてトレイ5の搬送方向の最も上流側に配設されたロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0097】
ここで、ピックアップコンベア2とプレイスコンベア3とは、相互に搬送方向が直交するように配置してもよい。
【0098】
このような構成からなる、第6のワーク移載システム60における移載動作を説明する。
【0099】
まず、搬送されてくるワーク4の位置、形状と数量とトレイ5の形状、数量および空きの有無をそれぞれワーク用センサ6aとトレイ用センサ6bとにより検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、コントローラ8で設定した分配比率で複数台のロボット7に対してそれぞれ保持するワーク4を配分する。
【0100】
対象ワーク4がロボット7の作業範囲内に搬送されると、複数台のロボット7が割り振られたワーク4をマニピュレータでそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0101】
さらに、トレイ5への移載作業を行うと同時に、ロボット7の作業範囲内において、トレイ5へ移載しきれずにピックアップコンベア2上に残ったワーク4をバッファコンベア62に移載することで、仮置きする。
【0102】
仮置きされたワーク4は、プレイスコンベア3上を搬送されてくるトレイ5に空きがある場合に、トレイ5へ移載される。
【0103】
この時、バッファコンベア62は、ロボット7の動作に連動して移動可能としてもよい。
【0104】
このような構成の、第6のワーク移載システム60とすることにより、ピックアップコンベア2上のワーク4の搬送量が急激に増加してトレイ5に移載できないワーク4が発生した場合においても、トレイ5への移載作業と同時に移載しきれずに残ったワーク4をバッファコンベア62に一旦、仮置きすることで、ワーク4のオーバーフローの発生を防止することができる。
【0105】
また、バッファコンベア62は、プレイスコンベア3の近傍に限らず、ピックアップコンベア2の近傍に配設されてもよい。
【0106】
本発明のワーク移載システムの第7の実施形態である第7のワーク移載システム70について説明する。
【0107】
第7のワーク移載システム70においては、図7に示すように、ピックアップコンベア2とプレイスコンベア3とが並列に配設され、ピックアップコンベア2とプレイスコンベア3の上方には、ワーク4を保持および解放してトレイ5へ移載するロボット7が複数台配設されている。
【0108】
この時、ワーク4を搬送するためのピックアップコンベア2が、ワーク4を所定個数ずつ所定のピッチで搬送可能なバケットコンベア72からなっている。
【0109】
また、バケットコンベア72の近傍には、ワーク4を1列で搬送するバケットコンベア72に対してワーク4を供給するワーク供給コンベア72aが配設されている。
【0110】
また、センサ6は、ワーク4の搬送方向におけるロボット7の上流側に配設されるワーク用センサ6aと、トレイ5の搬送方向におけるロボット7の上流側に配設されるトレイ用センサ6bとからなる。
【0111】
ここで、バケットコンベア72とプレイスコンベア3とは、相互に搬送方向が直交するように配置してもよい。
【0112】
このような構成からなる、第7のワーク移載システム70における移載動作を説明する。
【0113】
まず、ワーク供給コンベア72a上を1列で搬送されてきたワーク4は、バケットコンベア72の1個目のバケットに投入される。1個目のバケットコンベア72は、予め設定されている個数のワーク4が1個目のバケットに投入されたことを検知すると、バケットが1ピッチ下流側へ搬送され、2個目のバケットに対するワーク4の供給が開始される。このようなワーク4の供給動作を連続して行い、バケットコンベア72によってワーク4を所定個数ずつ所定ピッチで搬送を行う。
【0114】
ワーク用センサ6aおよびトレイ用センサ6bによって、バケットコンベア72上を搬送されてくるワーク4の位置および形状とプレイスコンベア3上のトレイ5の形状、数量および空きの有無とを検知する。検知されたデータは、コントローラ8に送信され、得られた情報に基づいて、ロボット7に対して保持するワーク4を決定する。
【0115】
対象のワーク4がロボット7の作業範囲内に搬送されると、ロボット7がワーク4をマニピュレータでそれぞれ保持および解放して、決められたトレイ5への移載を行う。
【0116】
このような構成の、第7のワーク移載システム70とすることにより、ワーク4の搬送量および搬送ピッチのバラツキを防止してワーク4のオーバーフローの発生を防止することができるとともに、予めワーク4を必要な個数ずつ搬送することができるので、大量のワーク4を素早く処理して移載の作業効率を良くすることができる。
【0117】
また、バケットコンベア72に対してリターンコンベア52およびバッファコンベア62を配設することで、よりワーク4のオーバーフローの発生を防止できるとともに、効率の良い移載作業を実現することができる。
【0118】
なお、本発明のワーク移載システムは上記各実施形態に限定するものではなく、適宜、第1のワーク移載システムの構成乃至第7のワーク移載システムの構成を組み合わせることおよび適宜変更することが可能である。
【符号の説明】
【0119】
1 ワーク移載システム
2 ピックアップコンベア
3 プレイスコンベア
4 ワーク
5 トレイ
6 センサ
6a ワーク用センサ
6b トレイ用センサ
7 ロボット
8 コントローラ
9 モータ
10 第1のワーク移載システム
20 第2のワーク移載システム
30 第3のワーク移載システム
33 搬送コンベア
40 第4のワーク移載システム
4A 製造機械
4B 包装機械
50 第5のワーク移載システム
52 リターンコンベア
60 第6のワーク移載システム
62 バッファコンベア
A2 ワーク供給装置
A3 トレイ供給装置
B3 梱包装置
70 第7のワーク移載システム
72 バケットコンベア
72a ワーク供給コンベア
【特許請求の範囲】
【請求項1】
ワークを搬送するピックアップコンベアと、
前記ワークを載置するためのトレイを搬送するプレイスコンベアと、
前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、
前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、
前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、
複数台の前記ロボットが、前記ワークの搬送方向に沿うように配設され、
前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とするワーク移載システム。
【請求項2】
前記ワークと前記トレイとが、並列で逆方向に搬送されることを特徴とする請求項1に記載のワーク移載システム。
【請求項3】
前記プレイスコンベアが2台以上であることを特徴とする請求項1または請求項2に記載のワーク移載システム。
【請求項4】
2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されていることを特徴とする請求項3に記載のワーク移載システム。
【請求項5】
複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されていることを特徴とする請求項1または請求項2に記載のワーク移載システム。
【請求項6】
複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍には、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されていることを特徴とする請求項5に記載のワーク移載システム。
【請求項7】
ワークを搬送するピックアップコンベアと、
前記ワークを載置するトレイを搬送するプレイスコンベアと、
前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、
前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、
前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、
前記ピックアップコンベアと前記プレイスコンベアとが、相互に搬送方向が直交するように配設され、
前記ピックアップコンベアと前記プレイスコンベアとが交差する部分には、前記ロボットが配設され、
前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とするワーク移載システム。
【請求項8】
前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されていることを特徴とする請求項7に記載のワーク移載システム。
【請求項9】
前記ピックアップコンベアには、前記ワークの搬送方向における下流側から上流側へ前記ワークを還流するリターンコンベアが配設されていることを特徴とする請求項1乃至請求項8のいずれか1項に記載のワーク移載システム。
【請求項10】
前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍には、前記ワークを仮置きするバッファコンベアが配設されていることを特徴とする請求項1乃至請求項9のいずれか1項に記載のワーク移載システム。
【請求項11】
前記ピックアップコンベアが、前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアであることを特徴とする請求項1乃至請求項10のいずれか1項に記載のワーク移載システム。
【請求項1】
ワークを搬送するピックアップコンベアと、
前記ワークを載置するためのトレイを搬送するプレイスコンベアと、
前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、
前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、
前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、
複数台の前記ロボットが、前記ワークの搬送方向に沿うように配設され、
前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とするワーク移載システム。
【請求項2】
前記ワークと前記トレイとが、並列で逆方向に搬送されることを特徴とする請求項1に記載のワーク移載システム。
【請求項3】
前記プレイスコンベアが2台以上であることを特徴とする請求項1または請求項2に記載のワーク移載システム。
【請求項4】
2台以上の前記プレイスコンベアが前記ピックアップコンベアを挟むように並列に配設されていることを特徴とする請求項3に記載のワーク移載システム。
【請求項5】
複数台の前記ロボットに対して前記プレイスコンベアがそれぞれ1台ずつ配設されていることを特徴とする請求項1または請求項2に記載のワーク移載システム。
【請求項6】
複数台の前記ロボットに対してそれぞれ1台ずつ配設された前記プレイスコンベアの近傍には、前記ワークが移載されて充填された後の前記トレイのみを搬送する搬送コンベアが配設されていることを特徴とする請求項5に記載のワーク移載システム。
【請求項7】
ワークを搬送するピックアップコンベアと、
前記ワークを載置するトレイを搬送するプレイスコンベアと、
前記ワークを保持および解放して前記トレイへ移載する複数台のロボットと、
前記ワークおよび前記トレイの位置、形状および数量をそれぞれ検知するセンサと、
前記センサからの情報に応じて前記ピックアップコンベアおよび前記プレイスコンベアの搬送速度と前記ロボットの動作とを制御するコントローラとを有するワーク移載システムにおいて、
前記ピックアップコンベアと前記プレイスコンベアとが、相互に搬送方向が直交するように配設され、
前記ピックアップコンベアと前記プレイスコンベアとが交差する部分には、前記ロボットが配設され、
前記センサが、前記ワークの搬送方向における前記ロボットの上流側と、前記トレイの搬送方向における前記ロボットの上流側とに配設されていることを特徴とするワーク移載システム。
【請求項8】
前記ピックアップコンベアに複数台の前記プレイスコンベアが直交して配設されていることを特徴とする請求項7に記載のワーク移載システム。
【請求項9】
前記ピックアップコンベアには、前記ワークの搬送方向における下流側から上流側へ前記ワークを還流するリターンコンベアが配設されていることを特徴とする請求項1乃至請求項8のいずれか1項に記載のワーク移載システム。
【請求項10】
前記ロボットの作業範囲内であって、前記ピックアップコンベアの近傍または前記プレイスコンベアの近傍には、前記ワークを仮置きするバッファコンベアが配設されていることを特徴とする請求項1乃至請求項9のいずれか1項に記載のワーク移載システム。
【請求項11】
前記ピックアップコンベアが、前記ワークを所定個数ごとに所定ピッチで搬送可能なバケットコンベアであることを特徴とする請求項1乃至請求項10のいずれか1項に記載のワーク移載システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−184102(P2012−184102A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−50251(P2011−50251)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(395014563)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(395014563)
【Fターム(参考)】
[ Back to top ]