
一体型基準反射器を有する画像化カテーテル
一部には、本出願はレンズアセンブリに関する。レンズアセンブリは、マイクロレンズ(86)と、マイクロレンズと光学的に連絡するビームディレクタ(90)と、実質的に透明な薄膜(94)とを含む。実質的に透明な薄膜は、光を双方向に伝送し、かつ制御された量の後方散乱を発生することが可能である。さらに、薄膜は、ビームディレクタの一部分を取り囲んでいる。レンズアセンブリは、OCTシステムのサンプルアームにおいて用いられ得る。薄膜からの後方散乱は、基準アームの経路長をサンプルアームの経路長に調節するために(すなわち、zオフセット検出のために)用いられ得る。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光学画像化に関し、より具体的には、光コヒーレンストモグラフィー(optical coherence tomography;OCT)用の光ファイバプローブの設計および関連する画像化技術に関する。
【背景技術】
【0002】
光干渉は、科学全体にわたって広く使用されている現象である。特に、短コヒーレンス(または、「低コヒーレンス」)干渉画像法の使用は、いくつかの分野、特に、医療用途において重要な画像化モダリティになっている。干渉画像法においては、既知の制御された光学経路(optical path)(「基準経路(reference path)」)が未知の経路から戻された光と干渉させられ、その結果として、この未知の経路(「サンプル経路」)に関する情報が、もたらされたインターフェログラムの解析によって決定され得る。
【0003】
短コヒーレンス画像法において、インターフェログラムは、解析されるサンプル内の構造の深さ方向の位置情報を含む。サンプルの体積に対して短コヒーレンス光をスキャンしてトモグラフィー画像を生成することは、光コヒーレンストモグラフィー、つまりOCTとして公知である。近年、実用的なレーザベースの20μm以下のコヒーレンス長を有する光源が利用可能になり、眼科学、一般顕微鏡検査法、心臓学、腫瘍学を含むいくつかの分野において、OCTの利用を促進している。
【0004】
OCTの特定の利点は、OCTを非侵襲性または最小侵襲性の医療処置に対するほぼ理想的な画像化モダリティにしている、光ファイバとのその特有の互換性である。
【0005】
すべてのOCT実装の中心をなすのは、サンプル経路および基準経路の長さが、記録される干渉効果がサンプル内の所望のスキャン領域に対応することを保証するために、合致するという要件である。多くの処置において必要とされる比較的長い光カテーテル(通常は、約1.5〜2メートル)の場合には、経路長を合致させるためのこの要件は、特に、OCTの実際の多くの実装がミリメートルスケールの整合を必要としているので、達成するのが困難になり得る。さらに、これらのカテーテルに使用される非常に細いファイバは、使用中に数ミリメートル、容易に伸びるかまたは収縮し得る。
【0006】
OCTを任意の用途に使用する場合には、光学的「ゼロ点」はクリティカルである。これは、画像空間において、いわゆる基準平面が存在する場所を規定する。従来的には、表面の平面はx−y平面にあり、その深さはz軸に沿って生じる。例えば顕微鏡用途においては、顕微鏡用スライドの表面にゼロ点を設定することば有益であり、従って、試料はこの既知の表面に対して測定され得る。身体の管腔に挿入されたカテーテルにおいて、最も有用な基準平面は、カテーテルの先端部自体の外側表面であり、すべての距離は、この位置から外側に向かって測定される。
【0007】
回転カテーテルにおいて、x−y−z空間は、極座標(角度および放射方向距離)において最もよく表される。従って、z軸は放射状の、中心からの距離になる。実際に、整合点を設定することは、サンプルの選択された基準平面からの光学長(optical length)が、基準アームの一次光学長に等しいことを意味する。スキャンにおける基準アーム長の高速な変化は、一次長における小さな変化のみを表す。OCTは、組織をせいぜいほんの数ミリメートル貫通するので、スキャンが実際上、一般に1〜5mmに限定されるのに対して、サンプルおよび基準アームの実際の長さは数メートルであり得る。
【0008】
例えば、心臓学に使用される光カテーテルの場合に、器具自体は、患者を囲む名目上の「滅菌領域」の外側に配置され、カテーテル自体はこの領域内にあり、この2つをつなぐためにアンビリカルが使用される。サンプルアームの全体の光学長(カテーテル足すアンビリカル)は、容易に5メートルに達し得、これはまた基準アームの一次長であり得る。スキャンはおそらく5mmであるので、これは、全体の長さの0.1%を表す。測定精度は、この用途においては、0.1mmまたはそれより良好であることが必要とされる。カテーテルおよびアンビリカル内の各々の光ファイバの長さをミリメートル未満の寸法に制御することは、費用対効果がよくないので、ほとんどの設計アプローチは、光画像化機器内の調節可能な基準経路を使用して、カテーテルが使用されるときに、各々のカテーテルを調節する。
【0009】
しかしながら、医療用途は、毎日多くの使い捨てのカテーテルを使用し得、そのすべてが同じ画像化機器にインターフェイスされる。従って、一次経路長の調節は、かなり効果的に機能し得るが、カテーテル先端部の外側表面に一致する基準経路を調節する方法を決定することは、OCTによって記録される、カテーテルの光の反射パターンまたは「サイン」を理解する熟練したオペレータによる初期調節を通常は必要とする。再び、画像ゼロ点の調節または基準平面位置の調節は、基準アームの一次経路長を調節することによって実行される。この調節は、しばしば基準アームの「zオフセット」と呼ばれ、zオフセットモータと単に呼ばれるモータを介して制御される。従来の方法では、サンプルアーム長(カテーテル)が設計通りに正確に製造されている場合には、器具のzオフセットはゼロであり、カテーテルが短すぎる場合には、器具のzオフセットは負であり、カテーテルが長すぎる場合には、器具のzオフセットは正である。
【0010】
これらの光カテーテルは、一般に、それらの遠位の先端部に配置されたレンズおよび反射器構造を有することにより、スキャン目的のための光の焦点を合わせて方向付ける。光は、一般に、カテーテルの外側構造を含む1つ以上の透明なシースを通って伝播する。インターフェイスの各々は、OCTによって検出される反射を引き起こし得、および引き起こす。従って、これらの反射のうちのどれが、システムの所望の光学的基準点(「ゼロ点」)に対応するかを決定することは、難しいことであり得る。測定は、このゼロ点設定に基づいて行われるので、ゼロ点を正しく設定することは、医療用途において非常に大きな重要性を有する。さらに、いくつかの近接した間隔で置かれ、かつ同様な強度の反射が存在し得るので、適切なゼロ点オフセット(「zオフセット」)を検出するソフトウェアの使用は、非常に問題が多く、かつ信頼性に乏しい。
【0011】
上記のように、カテーテルが前進させられるかまたは引き込まれる場合に、光ファイバは、これらのスケールで顕著に伸び得る。例えば、OCTに使用される標準的光ファイバの既知の降伏強度およびカテーテルの長さを使用すると、ファイバが破壊する前に、10mmの伸びが起こり得ることを示すことは容易である。実際の状況において遭遇される典型的な力は、単に1mm以下の伸びを引き起こすが、多くの医療用測定は、1/4ミリメートルまたはそれより良い精度を必要としている。
【発明の概要】
【発明が解決しようとする課題】
【0012】
従って、カテーテルの光学的整合点(「ゼロ点」)を高い信頼性で決定するための単純で、費用対効果の高い方法が必要とされている。さらに、この方法は、カテーテルが操作されたり、引き込まれたり、前進させられたりするときに、ゼロ点が追跡され得るように、実時間ビデオレート画像化法と適合すべきである。本発明は、これらの課題に対処している。
【課題を解決するための手段】
【0013】
一局面において、本発明は、細長いセクションと、近位端と、遠位端とを有する光ファイバ画像化プローブに関し、このプローブは、この遠位端に適用された薄い制御された光散乱材料を含む。
【0014】
別の局面において、本発明は光学要素に関する。光学要素は、第一の表面と第二の表面を有する膜を含む。膜は、ポリマーと、その中に配置されている制御された光後方散乱のための少なくとも1つの後方散乱要素とを含む。さらに、膜は、実質的に歪みのない画像光の伝送を可能にする。
【0015】
本明細書に記載された本発明の局面は、さらなる実施形態を含み得る。例えば、光学要素は、複数の後方散乱要素をさらに含み得、この少なくとも1つの後方散乱要素および複数の後方散乱要素の各々は、粒子の寸法を有する粒子であり、複数の後方散乱要素は、ポリマー内に配置されている。一実施形態において、膜は、光ファイバ終端面またはマイクロレンズを巻き込むか、取り囲むか、包むか、または覆うために適切な湾曲した面を形成するように成形されている。
【0016】
粒子の寸法は、一部の好適な実施形態において、約1.5μm未満である。さらに、粒子は、チタン、亜鉛、アルミニウム、および/または光を散乱するために適切な他の材料を含み得る。複数の散乱要素は、体積で約0.1%のドーピング濃度の濃度を有し得る。光学要素は、細長い部材をさらに含み得、膜は、シースを形成するように成形されており、このシース内に細長い部材が配置されて、プローブ先端部の一部分を形成する。
【0017】
別の局面において、本発明は画像化プローブに関する。このプローブは、第一の端部および第二の端部を有する細長いセクションを含み、第二の端部は、管腔内の画像化が可能なプローブ先端部を形成し、プローブ先端部は散乱材料を含み、細長いセクションは、散乱材料によって反射された光を細長いセクションの第一の端部に伝送するように適合されている。
【0018】
一実施形態において、細長いセクションは光ファイバである。細長いセクションはシースであり得る。また、プローブは、シース内に配置された光ファイバをさらに含み得る。散乱材料は、マトリックス中に分散された複数の光散乱粒子を含み得る。散乱粒子は、チタンおよび/または光を散乱することが公知の他の材料を含み得る。また、マトリックスは、ポリエチレンテレフタレートおよび/または他のポリマーを含み得る。
【0019】
別の局面において、本発明はレンズアセンブリに関する。レンズアセンブリはマイクロレンズと、マイクロレンズと光学的に連絡するビームディレクタと、実質的に透明な薄膜とを含む。この実質的に透明な薄膜は、双方向に光を伝送し、制御された量の後方散乱を発生することが可能である。さらに、薄膜はビームディレクタの一部分を囲んでいる。
【0020】
本発明の一局面の一実施形態において、制御された量の後方散乱は、少なくとも1つの画像化システムパラメータの較正に対して、画像化システムにおいて基準点を発生するために少なくとも十分な光量である。実質的に透明な薄膜はまた、複数の散乱粒子を含み得る。マイクロレンズは、光ファイバと光学的に連絡し得る。さらに、実質的に透明な薄膜は、画像化プローブの先端部を形成するように成形され得る。また、プローブ先端部は、光コヒーレンストモグラフィー画像化法のために使用され得る。
【0021】
さらに別の局面において、本発明は光コヒーレンストモグラフィーシステムを較正する方法に関する。その方法は、サンプルから反射された光に応答してスキャンデータを発生することであって、反射光は、双方向性の実質的に透明な光学要素を通過する、ことと、双方向性の実質的に透明な光学要素内に配置された散乱要素から反射された散乱光に応答して基準データを発生することと、次のスキャンの相対的位置を決定するために、基準データに応答して光コヒーレンストモグラフィーシステムを較正することとを含む。
【0022】
本発明の一局面の一実施形態において、スキャンデータは、一組の角度と、一組の放射方向距離とを含む。さらに、基準データは、一組の角度と、一組の放射方向距離とを含み得る。較正するステップは、基準データ内でリングパターンを探索することを含み得る。
【0023】
さらに別の局面において、本発明は、光学要素を製作する方法に関する。その方法は、動物の管腔内使用に適した膜材料を選択することと、膜材料中の分散に適したドーパントを選択することであって、ドーパントは、光源に応答して光の散乱に適合する、ことと、ドーピングされた膜の半径方向のスキャンが規定されたパターンを発生するようにドーパントの体積濃度を決定することと、決定されたドーパントの体積濃度を実質的に取得するために、選択されたドーパントによって膜をドーピングすることと、動物の管腔内使用のための膜を形成することとを含む。
【0024】
一実施形態において、膜は、ポリエチレンテレフタレートを含む。ドーパントの体積濃度は、体積で約0.1%のドーピング濃度を含み得る。選択されたドーパントは、酸化物を含み得る。さらに、規定されたパターンは、リングおよび渦巻きからなる群から選択され得る。
【図面の簡単な説明】
【0025】
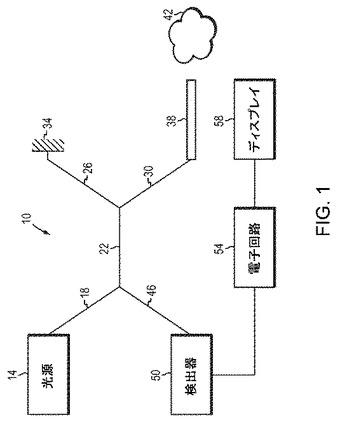
【図1】図1は、本発明の光プローブによる使用に適したOCTシステムのブロック図である。
【図2】図2は、冠状動脈のOCT画像化による使用に適した光カテーテルシステムの概略図である。
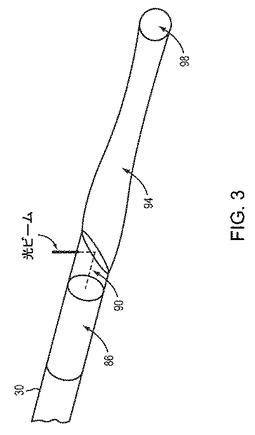
【図3】図3は、マイクロレンズおよび防護カバーを有する光ファイバ先端部の概略図である。
【図3a】図3aは、図3において概略的に示されたプローブの実施形態の顕微鏡写真である。
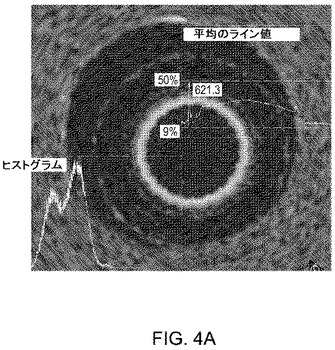
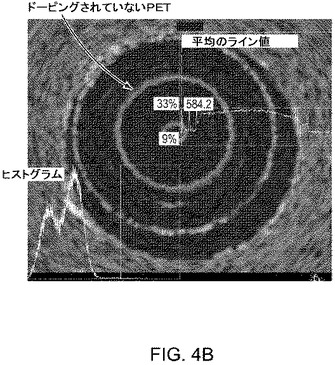
【図4a】図4aおよび図4bは、ドーピングされたプラスチックレンズカバーと、ドーピングされていないプラスチック(PETなどの)カバーとによってとられた画像をそれぞれ示している。
【図4b】図4aおよび図4bは、ドーピングされたプラスチックレンズカバーと、ドーピングされていないプラスチック(PETなどの)カバーとによってとられた画像をそれぞれ示している。
【図4c】図4cは、ドーパントTiO2の過剰濃度が用いられ、その結果もたらされる凝集が光の陰影に導くOCT画像を示している。
【図5a】図5aは、適切なスキャンライン配向を有する周波数領域のOCT画像と、破線によって示される検出されたPET反射とを示している。
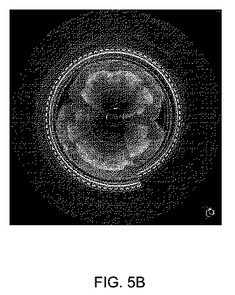
【図5b】図5bは、反転したスキャンライン配向(すなわち反転状態)を有する周波数領域のOCT画像と、破線によって示される検出されたPET反射とを示している。
【図6】図6は、PETリングを検出するために用いられるアルゴリズムの実施形態のフローチャートである。
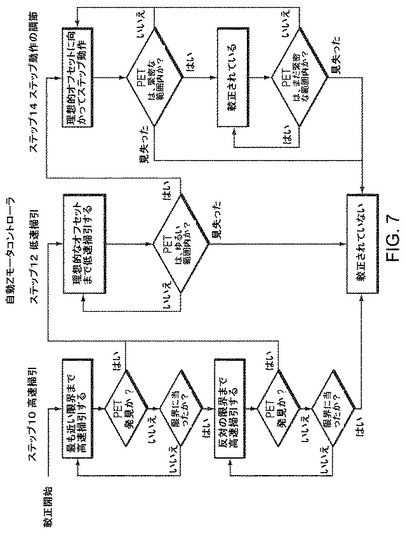
【図7】図7は、PETリングの位置を設定するために用いられるアルゴリズムの実施形態のフローチャートである。
【図8】図8は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが正しく設定されている冠状動脈画像を示している。
【図9】図9は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが誤って設定されている冠状動脈画像を示している(ゼロ点が短すぎ、かつ光ファイバ内に移動して、画像を中心から離れるように拡大させている)。
【図10】図10は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが誤って設定されている冠状動脈画像を示している(ゼロ点が長すぎ、かつファイバの外側の位置に移動して、画像を中心に縮小させている)。
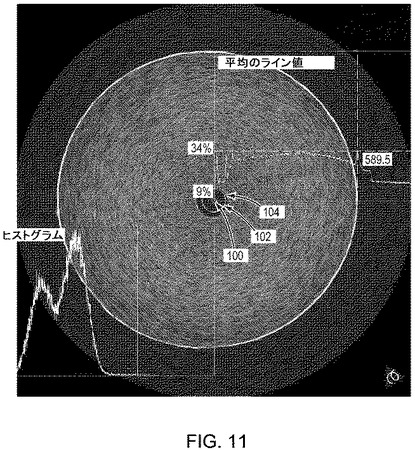
【図11】図11は、本発明の実施形態に従った、特有のリング反射を示すカテーテル中心の拡大されたOCT画像を示している。
【発明を実施するための形態】
【0026】
簡潔な概観において図1を参照すると、一般化されたOCT干渉計10が示され、OCT干渉計10は、本発明のカテーテル画像化システムによる使用に適している。レーザダイオードなどの光源14が、短コヒーレンス長の光を生成し、この短コヒーレンス長の光は、光ファイバ18通って光ファイバカプラ22の中に伝わる。カプラ22に入る光は、2つの光ファイバ経路26および30に沿うように分割される。一方の経路26は、可動の反射器34で終わるが、他方はプローブ38に入り、対象の物体42に向かって放射される。
【0027】
光は、可動反射器34によって反射され、光ファイバ26に沿ってカプラ22に戻る。同様に、対象の物体42によって反射された光は、光ファイバ30に沿ってカプラ22に戻り、可動反射器34によって反射された光と組み合わされて、干渉縞を形成する。この組み合わされた光は、光ファイバ46を通過し、検出器50によって検出される。検出器50からの出力信号は、電子回路54によって処理され、画像がディスプレイ58上に形成される。
【0028】
図1のプローブとしての使用に適した画像化カテーテルの例が図2に示されている。この実施形態において、画像化プローブ38は、冠状脈管の画像化カテーテルの先端部である。コネクタ62が、図1のシステムの光カプラ22に付着する。光ファイバ30は、バルーンカテーテル70に付着されたy型本体部コネクタ66に入る。このカテーテル70は、洗浄用ポート74と、バルーン膨張用ポート78と、排水出口82とを含む。
【0029】
図3は、プローブ38の画像ワイヤ先端部の実施形態を示している。光ファイバ30は、マイクロレンズアセンブリ86中で終わり、マイクロレンズアセンブリ86は、それから一定の距離に光の焦点を合わせる。マイクロレンズアセンブリ86から放射された光は、ファイバ30の光軸に対して実質的に直角に伝わるように、ビームデフレクタ90によって反射される。以下で論じられるように、ファイバアセンブリ全体は、一方の端部98で密封された保護用透明シース94によってカバーされている。
【0030】
参考として本明細書に援用される米国特許第6,891,894号に説明されているように、特に有利なファイバレンズ設計は、ファイバを単に回転させることによって動脈などの管腔内部で必要なラジアルスキャンを提供するために、シリカ空気界面からの全反射を用いている。全反射がシリカと空気との間の屈折率の違いに依存するので、流体中の直接的な浸漬がこの反射を取り除き、代わりに、光が前方に伝播して、有用なラジアルスキャンを行う能力を損なう。’894特許と、図3および図3aとに示されているように、空気シリカ界面は、ファイバレンズアセンブリに直接的に接着された透明な防護カバー94を用いて保護され得る。そのようなカバーは、ポリエステル(ポリエチレンテレフタレート、すなわちPET)などの熱収縮性の材料から好ましくは作られ得る。PETは、産業用デバイスおよび医療用デバイスにおいて広く用いられ、良好な生体適合特性を有する。
【0031】
そのようなPETカバーは、特有の低い後方反射を有するので、その通常の形態においては、一定の基準反射を提供する目的に対しては不適切である。しかしながら、注意すれば、固有の後方反射を増大させるドーパントが、未処理のPET材料(管形状が形成される前)に追加され得る。
【0032】
いくつかの材料が、適切なドーパントとして存在している。特に、二酸化チタン(TiO2)は有利である。TiO2は、そのすぐれた光散乱特性に起因して多くのペイント調合に用いられる。さらに、TiO2は不活性であり、かつバルクで作られ得る。粒子サイズは、対象の光の波長(公称、1.3μm)よりもかなり小さくされ得、事実上「レイリー」散乱を起こす。従って、出て行く光の波面および戻って来る光の波面は、ほとんど妨害されることがなく、それによって、十分に低いドーパント濃度で任意の可能性のある画像劣化を最小化する。
【0033】
材料の作成における重要なステップは、TiO2粒子を未処理のPETに均一に混合することであり、それによって、PETを管形に引くときに、正しい濃度が高い均一性と共に実現される。さらに、OCT画像化法が、非常に高い感度と、大きなダイナミックレンジとを有する(一般に、100dBの感度と、60dB超のダイナミックレンジとが実用的な器具において達成され得る)ので、注意して計算されなければならず、そうすれば、材料中のTiO2の最適なドーピングレベルが達成される。
【0034】
基本的な散乱理論が、材料中のドーピング濃度に到達するために用いられ得る。冠状動脈の典型的なOCT画像においては、器具中の最小雑音は、約−100dBである。すなわちそれは、対象の物体に適用された光出力パワーの約100億分の1であり、典型的な画像は、約40dBの有用なダイナミックレンジを有する。画像処理電子回路とソフトウェアとが、この範囲に対して最適化されるので、プローブ反射器要素は、画像強度の最大の検出可能ピークの近くにある(約−60dB(−100+40)である)ように最適化されるべきである。このことは、プローブ反射器が、画像の中で最も明るい物体であるべきであることを意味している。
【0035】
本明細書中に記載されているように、プローブ反射器要素は、限定ではないが、膜、薄膜、キャップ、カバー、または他の材料を含み得る。一部の実施形態において、反射器要素は、柔軟であるか、または曲がらない。反射器要素は、様々な幾何形状で形作られ得、それによって、反射器の一部分が湾曲したり、平面であったり、または実質的に平面であったりする。
【0036】
粒子のための基本的散乱理論と、古典的レーダ断面積理論とは、単一のTiO2粒子から反射した光の断片が式、
【0037】
【数1】
によって与えられることを推定している。
【0038】
ここで、LRが戻り光の断片であり、σbが散乱断面積であり(標準的MIE理論から計算される)、Viが粒子の体積であり、lcが相互作用の長さであり(レーダ理論による)、この場合には、OCT光のコヒーレンス長であり、ΔΩがマイクロレンズの受光角(立体角)である。従って、約45nmの粒子サイズに対しては、散乱横断面が約4.26×10−7μm2であり、そして約15μmのコヒーレンス長を有する光で、約0.004の立体角を有するマイクロレンズを介して粒子を照射すると、反射光の断片LRは、約0.006または−32dBである。
【0039】
従って、プローブ基準反射器要素の材料から戻った全部の光は、単一粒子の光の断片に体積含有率(ドーピング濃度)を掛けたものに等しくあるべきである。これが約−60dBに等しくあるべき(上記から)であるので、−30dB(または0.001)の低減が必要とされている。従って、体積含有率は、約0.001、または体積で約0.1%のドーピング濃度であるべきである。このことは、TiO2粒子による強いが、過大パワーではない基準反射を結果としてもたらすはずである。
【0040】
ゼロ点オフセット位置が安定している場合には、ドーピングされたPET材料は、図4bのドーピングされていないカバーに比べて、図4aに示されているような画像中の一貫した、明るいリングを生成する。通常の使用中に基準経路長を故意に修正することによってあるいはファイバの引き伸ばしまたは圧縮を介して、ゼロ点オフセット位置が不安定な場合には、リングはどちらかといえば渦巻き形状である。TiO2粒子の濃度が高すぎる場合には、図4cに示されているように、凝集に影響されて、粒子が影を落としている。一実施形態において、プローブ反射器要素は、実質的に歪みのない画像光を伝送することが可能な膜である。用語「実質的に歪みのない画像光」は、サンプルまたはサンプル要素の画像を発生することに適した光を意味している。
【0041】
「未処理の」フォーマットで捕捉されたデータは、自転車の車輪のスポークに大変よく似ており、等しく間隔をおいた角度で各々が起こる一連のラジアルスキャンである。未処理データは、従来のアレイメモリのフォーマットで単に格納され、そこでは、列が角度を表し、各々の行が特定の放射方向距離である。従って、メモリに格納された完全な円の画像は、各々の列(すなわち、ゼロ(平坦)の傾斜を有する直線)に対して同一の行に沿って起こり得る。渦巻きパターンは、傾斜を有する直線として格納され、渦巻きが拡大している場合には正、渦巻きが収縮している場合には負である。
【0042】
従って、PET材料からの信号は、画像中の線を生成し、この線は、光学経路長が一定であるか、増大しているか、減少しているかどうかに依存して、平坦か、正か、または負の傾斜を有し得る。傾斜の大きさは、従って、引き伸ばしまたは収縮に起因するいずれかの方向におけるファイバ経路長の変化率に比例している。ゼロ点オフセット位置がここで検出可能であるので、ソフトウェアアルゴリズムは、メモリ中のPETリングの明るい反射、既知の厚さおよび予期される直線表現を利用することによって、PETリングを分離するために用いられ得る。
【0043】
周波数領域のOCTシステムにおいて、傾斜の符号がまた考慮されなければならない。周波数エイリアシング効果に起因して、OCT画像は、zオフセットモータトラックの特定の範囲にわたって反転されたように出現し得る。適切に配向された画像が図5a(検出されたPETが破線として示されている)において示され、一方で、反転画像が図5bに示されている。反転画像においては、スキャンラインが反転されるので、原点に近いターゲットが周囲に出現し、周囲のターゲットが原点の近くに出現する。画像が反転される場合には、配向が正常な場合のように、PET信号の傾斜が反対のサイン(反転状態)を有する。このことは、画像の配向を決定するために用いられ得る。
【0044】
アルゴリズムの基本のステップが図6に示されている。OCT画像が取得され(ステップ1)、統計的ベースで最初に解析される。この解析は、各々の所与の強度値に対してピクセルの数を計算する。ヒストグラムは次いで、背景雑音から前景の組織を分離するための「グローバル閾値」の値を発生するために用いられる(ステップ2)。画像強度がやがて背景雑音レベルに低下するので、大きな放射方向距離における強度が、システム全体の「雑音フロア」を推定するために用いられ得る。この値は、次いで、二値画像を生成する(ステップ3)ために用いられる。閾値の上の強度値が1に設定され、閾値の下の強度値がゼロに設定される。二値画像を解析し、入力OCT画像を解析しないことによって、ドーピングされたPET反射の絶対レベルへの依存が最小化される。
【0045】
一旦、二値画像が利用可能になると、二値画像は、1次元の空間周波数フィルタによってフィルタをかけられ(ステップ4)、この空間周波数フィルタは、既知のPET層の厚さに類似する厚さと、隣接の黒の空間とによる信号に対してピーク応答を有するように設計されている。図に示されているように、組織の影響が空間周波数フィルタによってかなり最小化され、一方で、PETリングが保護される。
【0046】
時間領域OCTシステムに関して、画像は、標準の配向をもっていると仮定され、ステップ5が省略される。周波数領域OCTシステムとは対照的に、プロセス(ステップ5)における次のステップは、一体的にフィルタをかけられた画像のすべてのスキャンラインを平均することにより、フィルタをかけられた画像全体に対して代表するスキャンラインを計算することによって、画像の配向を決定することである。この平均するプロセスは、予期されている傾斜Sを考慮し、スキャンライン位置をそれらの隣接ラインに対して線形に調節し、それによって、傾斜したPET信号がラインのすべてを横切って構成的に追加される。この「補正された傾斜の」平均のラインがまた、どの結果が最も強いピーク信号をもたらすかを見るために逆の傾斜−Sによって計算され得る。Sを用いる補正が最もよい結果をもたらす場合には、フレームは適切に配向され(図5a)、このフレームが用いられるべきである。−S(すなわち、負のS)を用いる補正が最もよい結果をもたらす場合には、フレームが反転され(図5b)、廃棄されるべきである。従って、特定の較正方法または配向方法の実施形態においては、同じものに関連しているか、または同じものを示している負の傾斜値、反転状態、または特定のパターンが、OCTスキャンに由来する特定の基礎データにおいて検出され、OCTシステム(または、その構成要素)を較正するために用いられ得る。
【0047】
プロセス(ステップ6)における次のステップは、象限あたり1つの代表するスキャンラインを生成するために、一体的にフィルタをかけられた二値画像の各々の象限においてスキャンラインのすべてを平均することである。このことは、格納されたメモリにおいて、列が4つの等しい群に分割され、各々の群に対して、すべての列が行にわたって一体的に平均されることにより、オリジナル画像の4つの90度の象限の各々に対して、1つの代表する列を生成することを意味している。このプロセスは、同心円状またはほとんど同心円状の画像内容を強調することに役立つ。平均が、完全な360度とは対照的に象限ベースで実行され、それによって、移動する基準経路(渦巻き形状である)からのPET信号が合計プロセスにおいて失われない。結果としてもたらされる4つの平均のラインの各々が、単純なボックスカーフィルタによって平滑化され、各々の最も明るい3つのピークが位置を定められる。
【0048】
最終的に、次のステップ(ステップ7)において、各々の象限の平均のラインからのピークが選択され、それが最もよいリングを一体的に生成する。再帰的アルゴリズムが、最初に4つのポイントの合計を計算し、次いで最小二乗フィットアルゴリズムを用いてポイントにフィットしたラインの平均二乗誤差(MSE)を計算することによって、各々のポテンシャル群を解析するために用いられる。結果としてもたらされるMSEが、スコアを形成するために4つのポイントの合計と組み合わされる。このスコアは、明るい(より大きな合計)、および平坦な(より小さなMSE)ポテンシャルリングを強調することに役立つ。最も大きなスコアを有する群が勝者として選択され、その合計は、結果が有効であるか否かを決定するためにカットオフと比較される。
【0049】
動作において、新しい画像カテーテルがシステムに接続されるときには、図7に示されているように、初期の粗い較正が、ファイバを回転させ、基準経路制御モータを調節することによって行われる。基準アームのzオフセットモータが、PETリングを探索しながら、最初にその限界の間を高速で掃引される(ステップ10)。一旦、リングが見出されると、モータスピードが遅くなり(ステップ12)、PET画像は、その所望の位置(ゼロ点、ここでは「ゆるい範囲(Loose Range)」と呼ばれる)の近くに移動される。
【0050】
一旦、ゆるい範囲内になると、モータは、PET画像が最終的に可能とされる範囲(「緊密な範囲(Tight Range)」)になるまでステップ的に動かされる(ステップ14)。実際のスキャンの間に、Zオフセットがわずかにドリフトし、PETが緊密な範囲の外に動くことを結果としてもたらし得る。このことが起こる場合には、モータが再起動されて、PETを緊密な範囲の中にステップ的に戻す。緊密な範囲の許容差は、所望の測定精度と、一定のzオフセットモータの動きの最小化とによるバランス設定である。
【0051】
実時間画像化の間に、PETリングは、勝者群の最小二乗フィットラインによって規定されるので、マイクロレンズアセンブリにおけるPETの既知の物理的位置に基づくスクリーン上の固定された位置(半径)で表示される。各々の画像フレームのzオフセットは、PETリングが所望の位置の中または位置の外で終わるように調節される。
【0052】
最終結果は、Zオフセットの補正された画像がスクリーン上に表示され、かつ保存された画像ファイルに格納されて、正しい臨床的測定が直接的な態様で実行されることを可能にする。図8は、zオフセットが正しく設定されている冠状動脈のOCT画像である。従って、血管径が、2.55mmとして正しく測定される。図9は、zオフセットがレンズアセンブリ内に位置決めされているように、zオフセットが誤って設定されている冠状動脈のOCT画像である。従って、血管径が、2.97mmとして誤って測定される。
【0053】
図10は、zオフセットが保護用PETカバーの外側に位置決めされているように、zオフセットが誤って設定されている冠状動脈のOCT画像である。従って、血管径が、2.00mmとして誤って測定される。従って、本発明は、OCT干渉計における基準経路とサンプル経路との等化を決定する方法を提供することにより、それによって、対象の物体の正確な計測を提供する。
【0054】
図11は、本発明の局面に従って発生された別のOCT画像である。特に、それは、マイクロレンズPET層(最も内側)100と、画像ワイヤプラスチックシース(中間)102とから発生する特徴のあるリング反射を示すカテーテル中心の拡大されたOCT画像である。外側リング104は、画像ワイヤが図11に示されている画像を発生するためにプラスチック管の中に挿入されるそのプラスチック管の内壁のエッジに対応している。しかしながら、管の厚さに起因して、外壁のエッジは画像中に見られない。
【0055】
図11において、PETリングは、標準的な、ドーピングされていないPETを用いて発生される。示されているように、画像ワイヤが、管の側面に向かって押しつけられ、それによって、第三の外側リング104が同心円状でないようにさせられる。
【0056】
上記された実施形態および例が限定ではなく例示として与えられていることは理解されるべきである。本発明の範囲内の様々な変更および修正が、本説明から当業者に明らかになるであろう。
【技術分野】
【0001】
本発明は、光学画像化に関し、より具体的には、光コヒーレンストモグラフィー(optical coherence tomography;OCT)用の光ファイバプローブの設計および関連する画像化技術に関する。
【背景技術】
【0002】
光干渉は、科学全体にわたって広く使用されている現象である。特に、短コヒーレンス(または、「低コヒーレンス」)干渉画像法の使用は、いくつかの分野、特に、医療用途において重要な画像化モダリティになっている。干渉画像法においては、既知の制御された光学経路(optical path)(「基準経路(reference path)」)が未知の経路から戻された光と干渉させられ、その結果として、この未知の経路(「サンプル経路」)に関する情報が、もたらされたインターフェログラムの解析によって決定され得る。
【0003】
短コヒーレンス画像法において、インターフェログラムは、解析されるサンプル内の構造の深さ方向の位置情報を含む。サンプルの体積に対して短コヒーレンス光をスキャンしてトモグラフィー画像を生成することは、光コヒーレンストモグラフィー、つまりOCTとして公知である。近年、実用的なレーザベースの20μm以下のコヒーレンス長を有する光源が利用可能になり、眼科学、一般顕微鏡検査法、心臓学、腫瘍学を含むいくつかの分野において、OCTの利用を促進している。
【0004】
OCTの特定の利点は、OCTを非侵襲性または最小侵襲性の医療処置に対するほぼ理想的な画像化モダリティにしている、光ファイバとのその特有の互換性である。
【0005】
すべてのOCT実装の中心をなすのは、サンプル経路および基準経路の長さが、記録される干渉効果がサンプル内の所望のスキャン領域に対応することを保証するために、合致するという要件である。多くの処置において必要とされる比較的長い光カテーテル(通常は、約1.5〜2メートル)の場合には、経路長を合致させるためのこの要件は、特に、OCTの実際の多くの実装がミリメートルスケールの整合を必要としているので、達成するのが困難になり得る。さらに、これらのカテーテルに使用される非常に細いファイバは、使用中に数ミリメートル、容易に伸びるかまたは収縮し得る。
【0006】
OCTを任意の用途に使用する場合には、光学的「ゼロ点」はクリティカルである。これは、画像空間において、いわゆる基準平面が存在する場所を規定する。従来的には、表面の平面はx−y平面にあり、その深さはz軸に沿って生じる。例えば顕微鏡用途においては、顕微鏡用スライドの表面にゼロ点を設定することば有益であり、従って、試料はこの既知の表面に対して測定され得る。身体の管腔に挿入されたカテーテルにおいて、最も有用な基準平面は、カテーテルの先端部自体の外側表面であり、すべての距離は、この位置から外側に向かって測定される。
【0007】
回転カテーテルにおいて、x−y−z空間は、極座標(角度および放射方向距離)において最もよく表される。従って、z軸は放射状の、中心からの距離になる。実際に、整合点を設定することは、サンプルの選択された基準平面からの光学長(optical length)が、基準アームの一次光学長に等しいことを意味する。スキャンにおける基準アーム長の高速な変化は、一次長における小さな変化のみを表す。OCTは、組織をせいぜいほんの数ミリメートル貫通するので、スキャンが実際上、一般に1〜5mmに限定されるのに対して、サンプルおよび基準アームの実際の長さは数メートルであり得る。
【0008】
例えば、心臓学に使用される光カテーテルの場合に、器具自体は、患者を囲む名目上の「滅菌領域」の外側に配置され、カテーテル自体はこの領域内にあり、この2つをつなぐためにアンビリカルが使用される。サンプルアームの全体の光学長(カテーテル足すアンビリカル)は、容易に5メートルに達し得、これはまた基準アームの一次長であり得る。スキャンはおそらく5mmであるので、これは、全体の長さの0.1%を表す。測定精度は、この用途においては、0.1mmまたはそれより良好であることが必要とされる。カテーテルおよびアンビリカル内の各々の光ファイバの長さをミリメートル未満の寸法に制御することは、費用対効果がよくないので、ほとんどの設計アプローチは、光画像化機器内の調節可能な基準経路を使用して、カテーテルが使用されるときに、各々のカテーテルを調節する。
【0009】
しかしながら、医療用途は、毎日多くの使い捨てのカテーテルを使用し得、そのすべてが同じ画像化機器にインターフェイスされる。従って、一次経路長の調節は、かなり効果的に機能し得るが、カテーテル先端部の外側表面に一致する基準経路を調節する方法を決定することは、OCTによって記録される、カテーテルの光の反射パターンまたは「サイン」を理解する熟練したオペレータによる初期調節を通常は必要とする。再び、画像ゼロ点の調節または基準平面位置の調節は、基準アームの一次経路長を調節することによって実行される。この調節は、しばしば基準アームの「zオフセット」と呼ばれ、zオフセットモータと単に呼ばれるモータを介して制御される。従来の方法では、サンプルアーム長(カテーテル)が設計通りに正確に製造されている場合には、器具のzオフセットはゼロであり、カテーテルが短すぎる場合には、器具のzオフセットは負であり、カテーテルが長すぎる場合には、器具のzオフセットは正である。
【0010】
これらの光カテーテルは、一般に、それらの遠位の先端部に配置されたレンズおよび反射器構造を有することにより、スキャン目的のための光の焦点を合わせて方向付ける。光は、一般に、カテーテルの外側構造を含む1つ以上の透明なシースを通って伝播する。インターフェイスの各々は、OCTによって検出される反射を引き起こし得、および引き起こす。従って、これらの反射のうちのどれが、システムの所望の光学的基準点(「ゼロ点」)に対応するかを決定することは、難しいことであり得る。測定は、このゼロ点設定に基づいて行われるので、ゼロ点を正しく設定することは、医療用途において非常に大きな重要性を有する。さらに、いくつかの近接した間隔で置かれ、かつ同様な強度の反射が存在し得るので、適切なゼロ点オフセット(「zオフセット」)を検出するソフトウェアの使用は、非常に問題が多く、かつ信頼性に乏しい。
【0011】
上記のように、カテーテルが前進させられるかまたは引き込まれる場合に、光ファイバは、これらのスケールで顕著に伸び得る。例えば、OCTに使用される標準的光ファイバの既知の降伏強度およびカテーテルの長さを使用すると、ファイバが破壊する前に、10mmの伸びが起こり得ることを示すことは容易である。実際の状況において遭遇される典型的な力は、単に1mm以下の伸びを引き起こすが、多くの医療用測定は、1/4ミリメートルまたはそれより良い精度を必要としている。
【発明の概要】
【発明が解決しようとする課題】
【0012】
従って、カテーテルの光学的整合点(「ゼロ点」)を高い信頼性で決定するための単純で、費用対効果の高い方法が必要とされている。さらに、この方法は、カテーテルが操作されたり、引き込まれたり、前進させられたりするときに、ゼロ点が追跡され得るように、実時間ビデオレート画像化法と適合すべきである。本発明は、これらの課題に対処している。
【課題を解決するための手段】
【0013】
一局面において、本発明は、細長いセクションと、近位端と、遠位端とを有する光ファイバ画像化プローブに関し、このプローブは、この遠位端に適用された薄い制御された光散乱材料を含む。
【0014】
別の局面において、本発明は光学要素に関する。光学要素は、第一の表面と第二の表面を有する膜を含む。膜は、ポリマーと、その中に配置されている制御された光後方散乱のための少なくとも1つの後方散乱要素とを含む。さらに、膜は、実質的に歪みのない画像光の伝送を可能にする。
【0015】
本明細書に記載された本発明の局面は、さらなる実施形態を含み得る。例えば、光学要素は、複数の後方散乱要素をさらに含み得、この少なくとも1つの後方散乱要素および複数の後方散乱要素の各々は、粒子の寸法を有する粒子であり、複数の後方散乱要素は、ポリマー内に配置されている。一実施形態において、膜は、光ファイバ終端面またはマイクロレンズを巻き込むか、取り囲むか、包むか、または覆うために適切な湾曲した面を形成するように成形されている。
【0016】
粒子の寸法は、一部の好適な実施形態において、約1.5μm未満である。さらに、粒子は、チタン、亜鉛、アルミニウム、および/または光を散乱するために適切な他の材料を含み得る。複数の散乱要素は、体積で約0.1%のドーピング濃度の濃度を有し得る。光学要素は、細長い部材をさらに含み得、膜は、シースを形成するように成形されており、このシース内に細長い部材が配置されて、プローブ先端部の一部分を形成する。
【0017】
別の局面において、本発明は画像化プローブに関する。このプローブは、第一の端部および第二の端部を有する細長いセクションを含み、第二の端部は、管腔内の画像化が可能なプローブ先端部を形成し、プローブ先端部は散乱材料を含み、細長いセクションは、散乱材料によって反射された光を細長いセクションの第一の端部に伝送するように適合されている。
【0018】
一実施形態において、細長いセクションは光ファイバである。細長いセクションはシースであり得る。また、プローブは、シース内に配置された光ファイバをさらに含み得る。散乱材料は、マトリックス中に分散された複数の光散乱粒子を含み得る。散乱粒子は、チタンおよび/または光を散乱することが公知の他の材料を含み得る。また、マトリックスは、ポリエチレンテレフタレートおよび/または他のポリマーを含み得る。
【0019】
別の局面において、本発明はレンズアセンブリに関する。レンズアセンブリはマイクロレンズと、マイクロレンズと光学的に連絡するビームディレクタと、実質的に透明な薄膜とを含む。この実質的に透明な薄膜は、双方向に光を伝送し、制御された量の後方散乱を発生することが可能である。さらに、薄膜はビームディレクタの一部分を囲んでいる。
【0020】
本発明の一局面の一実施形態において、制御された量の後方散乱は、少なくとも1つの画像化システムパラメータの較正に対して、画像化システムにおいて基準点を発生するために少なくとも十分な光量である。実質的に透明な薄膜はまた、複数の散乱粒子を含み得る。マイクロレンズは、光ファイバと光学的に連絡し得る。さらに、実質的に透明な薄膜は、画像化プローブの先端部を形成するように成形され得る。また、プローブ先端部は、光コヒーレンストモグラフィー画像化法のために使用され得る。
【0021】
さらに別の局面において、本発明は光コヒーレンストモグラフィーシステムを較正する方法に関する。その方法は、サンプルから反射された光に応答してスキャンデータを発生することであって、反射光は、双方向性の実質的に透明な光学要素を通過する、ことと、双方向性の実質的に透明な光学要素内に配置された散乱要素から反射された散乱光に応答して基準データを発生することと、次のスキャンの相対的位置を決定するために、基準データに応答して光コヒーレンストモグラフィーシステムを較正することとを含む。
【0022】
本発明の一局面の一実施形態において、スキャンデータは、一組の角度と、一組の放射方向距離とを含む。さらに、基準データは、一組の角度と、一組の放射方向距離とを含み得る。較正するステップは、基準データ内でリングパターンを探索することを含み得る。
【0023】
さらに別の局面において、本発明は、光学要素を製作する方法に関する。その方法は、動物の管腔内使用に適した膜材料を選択することと、膜材料中の分散に適したドーパントを選択することであって、ドーパントは、光源に応答して光の散乱に適合する、ことと、ドーピングされた膜の半径方向のスキャンが規定されたパターンを発生するようにドーパントの体積濃度を決定することと、決定されたドーパントの体積濃度を実質的に取得するために、選択されたドーパントによって膜をドーピングすることと、動物の管腔内使用のための膜を形成することとを含む。
【0024】
一実施形態において、膜は、ポリエチレンテレフタレートを含む。ドーパントの体積濃度は、体積で約0.1%のドーピング濃度を含み得る。選択されたドーパントは、酸化物を含み得る。さらに、規定されたパターンは、リングおよび渦巻きからなる群から選択され得る。
【図面の簡単な説明】
【0025】
【図1】図1は、本発明の光プローブによる使用に適したOCTシステムのブロック図である。
【図2】図2は、冠状動脈のOCT画像化による使用に適した光カテーテルシステムの概略図である。
【図3】図3は、マイクロレンズおよび防護カバーを有する光ファイバ先端部の概略図である。
【図3a】図3aは、図3において概略的に示されたプローブの実施形態の顕微鏡写真である。
【図4a】図4aおよび図4bは、ドーピングされたプラスチックレンズカバーと、ドーピングされていないプラスチック(PETなどの)カバーとによってとられた画像をそれぞれ示している。
【図4b】図4aおよび図4bは、ドーピングされたプラスチックレンズカバーと、ドーピングされていないプラスチック(PETなどの)カバーとによってとられた画像をそれぞれ示している。
【図4c】図4cは、ドーパントTiO2の過剰濃度が用いられ、その結果もたらされる凝集が光の陰影に導くOCT画像を示している。
【図5a】図5aは、適切なスキャンライン配向を有する周波数領域のOCT画像と、破線によって示される検出されたPET反射とを示している。
【図5b】図5bは、反転したスキャンライン配向(すなわち反転状態)を有する周波数領域のOCT画像と、破線によって示される検出されたPET反射とを示している。
【図6】図6は、PETリングを検出するために用いられるアルゴリズムの実施形態のフローチャートである。
【図7】図7は、PETリングの位置を設定するために用いられるアルゴリズムの実施形態のフローチャートである。
【図8】図8は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが正しく設定されている冠状動脈画像を示している。
【図9】図9は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが誤って設定されている冠状動脈画像を示している(ゼロ点が短すぎ、かつ光ファイバ内に移動して、画像を中心から離れるように拡大させている)。
【図10】図10は、図1および図2中の構成要素を用いて作られた、ゼロ点オフセットが誤って設定されている冠状動脈画像を示している(ゼロ点が長すぎ、かつファイバの外側の位置に移動して、画像を中心に縮小させている)。
【図11】図11は、本発明の実施形態に従った、特有のリング反射を示すカテーテル中心の拡大されたOCT画像を示している。
【発明を実施するための形態】
【0026】
簡潔な概観において図1を参照すると、一般化されたOCT干渉計10が示され、OCT干渉計10は、本発明のカテーテル画像化システムによる使用に適している。レーザダイオードなどの光源14が、短コヒーレンス長の光を生成し、この短コヒーレンス長の光は、光ファイバ18通って光ファイバカプラ22の中に伝わる。カプラ22に入る光は、2つの光ファイバ経路26および30に沿うように分割される。一方の経路26は、可動の反射器34で終わるが、他方はプローブ38に入り、対象の物体42に向かって放射される。
【0027】
光は、可動反射器34によって反射され、光ファイバ26に沿ってカプラ22に戻る。同様に、対象の物体42によって反射された光は、光ファイバ30に沿ってカプラ22に戻り、可動反射器34によって反射された光と組み合わされて、干渉縞を形成する。この組み合わされた光は、光ファイバ46を通過し、検出器50によって検出される。検出器50からの出力信号は、電子回路54によって処理され、画像がディスプレイ58上に形成される。
【0028】
図1のプローブとしての使用に適した画像化カテーテルの例が図2に示されている。この実施形態において、画像化プローブ38は、冠状脈管の画像化カテーテルの先端部である。コネクタ62が、図1のシステムの光カプラ22に付着する。光ファイバ30は、バルーンカテーテル70に付着されたy型本体部コネクタ66に入る。このカテーテル70は、洗浄用ポート74と、バルーン膨張用ポート78と、排水出口82とを含む。
【0029】
図3は、プローブ38の画像ワイヤ先端部の実施形態を示している。光ファイバ30は、マイクロレンズアセンブリ86中で終わり、マイクロレンズアセンブリ86は、それから一定の距離に光の焦点を合わせる。マイクロレンズアセンブリ86から放射された光は、ファイバ30の光軸に対して実質的に直角に伝わるように、ビームデフレクタ90によって反射される。以下で論じられるように、ファイバアセンブリ全体は、一方の端部98で密封された保護用透明シース94によってカバーされている。
【0030】
参考として本明細書に援用される米国特許第6,891,894号に説明されているように、特に有利なファイバレンズ設計は、ファイバを単に回転させることによって動脈などの管腔内部で必要なラジアルスキャンを提供するために、シリカ空気界面からの全反射を用いている。全反射がシリカと空気との間の屈折率の違いに依存するので、流体中の直接的な浸漬がこの反射を取り除き、代わりに、光が前方に伝播して、有用なラジアルスキャンを行う能力を損なう。’894特許と、図3および図3aとに示されているように、空気シリカ界面は、ファイバレンズアセンブリに直接的に接着された透明な防護カバー94を用いて保護され得る。そのようなカバーは、ポリエステル(ポリエチレンテレフタレート、すなわちPET)などの熱収縮性の材料から好ましくは作られ得る。PETは、産業用デバイスおよび医療用デバイスにおいて広く用いられ、良好な生体適合特性を有する。
【0031】
そのようなPETカバーは、特有の低い後方反射を有するので、その通常の形態においては、一定の基準反射を提供する目的に対しては不適切である。しかしながら、注意すれば、固有の後方反射を増大させるドーパントが、未処理のPET材料(管形状が形成される前)に追加され得る。
【0032】
いくつかの材料が、適切なドーパントとして存在している。特に、二酸化チタン(TiO2)は有利である。TiO2は、そのすぐれた光散乱特性に起因して多くのペイント調合に用いられる。さらに、TiO2は不活性であり、かつバルクで作られ得る。粒子サイズは、対象の光の波長(公称、1.3μm)よりもかなり小さくされ得、事実上「レイリー」散乱を起こす。従って、出て行く光の波面および戻って来る光の波面は、ほとんど妨害されることがなく、それによって、十分に低いドーパント濃度で任意の可能性のある画像劣化を最小化する。
【0033】
材料の作成における重要なステップは、TiO2粒子を未処理のPETに均一に混合することであり、それによって、PETを管形に引くときに、正しい濃度が高い均一性と共に実現される。さらに、OCT画像化法が、非常に高い感度と、大きなダイナミックレンジとを有する(一般に、100dBの感度と、60dB超のダイナミックレンジとが実用的な器具において達成され得る)ので、注意して計算されなければならず、そうすれば、材料中のTiO2の最適なドーピングレベルが達成される。
【0034】
基本的な散乱理論が、材料中のドーピング濃度に到達するために用いられ得る。冠状動脈の典型的なOCT画像においては、器具中の最小雑音は、約−100dBである。すなわちそれは、対象の物体に適用された光出力パワーの約100億分の1であり、典型的な画像は、約40dBの有用なダイナミックレンジを有する。画像処理電子回路とソフトウェアとが、この範囲に対して最適化されるので、プローブ反射器要素は、画像強度の最大の検出可能ピークの近くにある(約−60dB(−100+40)である)ように最適化されるべきである。このことは、プローブ反射器が、画像の中で最も明るい物体であるべきであることを意味している。
【0035】
本明細書中に記載されているように、プローブ反射器要素は、限定ではないが、膜、薄膜、キャップ、カバー、または他の材料を含み得る。一部の実施形態において、反射器要素は、柔軟であるか、または曲がらない。反射器要素は、様々な幾何形状で形作られ得、それによって、反射器の一部分が湾曲したり、平面であったり、または実質的に平面であったりする。
【0036】
粒子のための基本的散乱理論と、古典的レーダ断面積理論とは、単一のTiO2粒子から反射した光の断片が式、
【0037】
【数1】
によって与えられることを推定している。
【0038】
ここで、LRが戻り光の断片であり、σbが散乱断面積であり(標準的MIE理論から計算される)、Viが粒子の体積であり、lcが相互作用の長さであり(レーダ理論による)、この場合には、OCT光のコヒーレンス長であり、ΔΩがマイクロレンズの受光角(立体角)である。従って、約45nmの粒子サイズに対しては、散乱横断面が約4.26×10−7μm2であり、そして約15μmのコヒーレンス長を有する光で、約0.004の立体角を有するマイクロレンズを介して粒子を照射すると、反射光の断片LRは、約0.006または−32dBである。
【0039】
従って、プローブ基準反射器要素の材料から戻った全部の光は、単一粒子の光の断片に体積含有率(ドーピング濃度)を掛けたものに等しくあるべきである。これが約−60dBに等しくあるべき(上記から)であるので、−30dB(または0.001)の低減が必要とされている。従って、体積含有率は、約0.001、または体積で約0.1%のドーピング濃度であるべきである。このことは、TiO2粒子による強いが、過大パワーではない基準反射を結果としてもたらすはずである。
【0040】
ゼロ点オフセット位置が安定している場合には、ドーピングされたPET材料は、図4bのドーピングされていないカバーに比べて、図4aに示されているような画像中の一貫した、明るいリングを生成する。通常の使用中に基準経路長を故意に修正することによってあるいはファイバの引き伸ばしまたは圧縮を介して、ゼロ点オフセット位置が不安定な場合には、リングはどちらかといえば渦巻き形状である。TiO2粒子の濃度が高すぎる場合には、図4cに示されているように、凝集に影響されて、粒子が影を落としている。一実施形態において、プローブ反射器要素は、実質的に歪みのない画像光を伝送することが可能な膜である。用語「実質的に歪みのない画像光」は、サンプルまたはサンプル要素の画像を発生することに適した光を意味している。
【0041】
「未処理の」フォーマットで捕捉されたデータは、自転車の車輪のスポークに大変よく似ており、等しく間隔をおいた角度で各々が起こる一連のラジアルスキャンである。未処理データは、従来のアレイメモリのフォーマットで単に格納され、そこでは、列が角度を表し、各々の行が特定の放射方向距離である。従って、メモリに格納された完全な円の画像は、各々の列(すなわち、ゼロ(平坦)の傾斜を有する直線)に対して同一の行に沿って起こり得る。渦巻きパターンは、傾斜を有する直線として格納され、渦巻きが拡大している場合には正、渦巻きが収縮している場合には負である。
【0042】
従って、PET材料からの信号は、画像中の線を生成し、この線は、光学経路長が一定であるか、増大しているか、減少しているかどうかに依存して、平坦か、正か、または負の傾斜を有し得る。傾斜の大きさは、従って、引き伸ばしまたは収縮に起因するいずれかの方向におけるファイバ経路長の変化率に比例している。ゼロ点オフセット位置がここで検出可能であるので、ソフトウェアアルゴリズムは、メモリ中のPETリングの明るい反射、既知の厚さおよび予期される直線表現を利用することによって、PETリングを分離するために用いられ得る。
【0043】
周波数領域のOCTシステムにおいて、傾斜の符号がまた考慮されなければならない。周波数エイリアシング効果に起因して、OCT画像は、zオフセットモータトラックの特定の範囲にわたって反転されたように出現し得る。適切に配向された画像が図5a(検出されたPETが破線として示されている)において示され、一方で、反転画像が図5bに示されている。反転画像においては、スキャンラインが反転されるので、原点に近いターゲットが周囲に出現し、周囲のターゲットが原点の近くに出現する。画像が反転される場合には、配向が正常な場合のように、PET信号の傾斜が反対のサイン(反転状態)を有する。このことは、画像の配向を決定するために用いられ得る。
【0044】
アルゴリズムの基本のステップが図6に示されている。OCT画像が取得され(ステップ1)、統計的ベースで最初に解析される。この解析は、各々の所与の強度値に対してピクセルの数を計算する。ヒストグラムは次いで、背景雑音から前景の組織を分離するための「グローバル閾値」の値を発生するために用いられる(ステップ2)。画像強度がやがて背景雑音レベルに低下するので、大きな放射方向距離における強度が、システム全体の「雑音フロア」を推定するために用いられ得る。この値は、次いで、二値画像を生成する(ステップ3)ために用いられる。閾値の上の強度値が1に設定され、閾値の下の強度値がゼロに設定される。二値画像を解析し、入力OCT画像を解析しないことによって、ドーピングされたPET反射の絶対レベルへの依存が最小化される。
【0045】
一旦、二値画像が利用可能になると、二値画像は、1次元の空間周波数フィルタによってフィルタをかけられ(ステップ4)、この空間周波数フィルタは、既知のPET層の厚さに類似する厚さと、隣接の黒の空間とによる信号に対してピーク応答を有するように設計されている。図に示されているように、組織の影響が空間周波数フィルタによってかなり最小化され、一方で、PETリングが保護される。
【0046】
時間領域OCTシステムに関して、画像は、標準の配向をもっていると仮定され、ステップ5が省略される。周波数領域OCTシステムとは対照的に、プロセス(ステップ5)における次のステップは、一体的にフィルタをかけられた画像のすべてのスキャンラインを平均することにより、フィルタをかけられた画像全体に対して代表するスキャンラインを計算することによって、画像の配向を決定することである。この平均するプロセスは、予期されている傾斜Sを考慮し、スキャンライン位置をそれらの隣接ラインに対して線形に調節し、それによって、傾斜したPET信号がラインのすべてを横切って構成的に追加される。この「補正された傾斜の」平均のラインがまた、どの結果が最も強いピーク信号をもたらすかを見るために逆の傾斜−Sによって計算され得る。Sを用いる補正が最もよい結果をもたらす場合には、フレームは適切に配向され(図5a)、このフレームが用いられるべきである。−S(すなわち、負のS)を用いる補正が最もよい結果をもたらす場合には、フレームが反転され(図5b)、廃棄されるべきである。従って、特定の較正方法または配向方法の実施形態においては、同じものに関連しているか、または同じものを示している負の傾斜値、反転状態、または特定のパターンが、OCTスキャンに由来する特定の基礎データにおいて検出され、OCTシステム(または、その構成要素)を較正するために用いられ得る。
【0047】
プロセス(ステップ6)における次のステップは、象限あたり1つの代表するスキャンラインを生成するために、一体的にフィルタをかけられた二値画像の各々の象限においてスキャンラインのすべてを平均することである。このことは、格納されたメモリにおいて、列が4つの等しい群に分割され、各々の群に対して、すべての列が行にわたって一体的に平均されることにより、オリジナル画像の4つの90度の象限の各々に対して、1つの代表する列を生成することを意味している。このプロセスは、同心円状またはほとんど同心円状の画像内容を強調することに役立つ。平均が、完全な360度とは対照的に象限ベースで実行され、それによって、移動する基準経路(渦巻き形状である)からのPET信号が合計プロセスにおいて失われない。結果としてもたらされる4つの平均のラインの各々が、単純なボックスカーフィルタによって平滑化され、各々の最も明るい3つのピークが位置を定められる。
【0048】
最終的に、次のステップ(ステップ7)において、各々の象限の平均のラインからのピークが選択され、それが最もよいリングを一体的に生成する。再帰的アルゴリズムが、最初に4つのポイントの合計を計算し、次いで最小二乗フィットアルゴリズムを用いてポイントにフィットしたラインの平均二乗誤差(MSE)を計算することによって、各々のポテンシャル群を解析するために用いられる。結果としてもたらされるMSEが、スコアを形成するために4つのポイントの合計と組み合わされる。このスコアは、明るい(より大きな合計)、および平坦な(より小さなMSE)ポテンシャルリングを強調することに役立つ。最も大きなスコアを有する群が勝者として選択され、その合計は、結果が有効であるか否かを決定するためにカットオフと比較される。
【0049】
動作において、新しい画像カテーテルがシステムに接続されるときには、図7に示されているように、初期の粗い較正が、ファイバを回転させ、基準経路制御モータを調節することによって行われる。基準アームのzオフセットモータが、PETリングを探索しながら、最初にその限界の間を高速で掃引される(ステップ10)。一旦、リングが見出されると、モータスピードが遅くなり(ステップ12)、PET画像は、その所望の位置(ゼロ点、ここでは「ゆるい範囲(Loose Range)」と呼ばれる)の近くに移動される。
【0050】
一旦、ゆるい範囲内になると、モータは、PET画像が最終的に可能とされる範囲(「緊密な範囲(Tight Range)」)になるまでステップ的に動かされる(ステップ14)。実際のスキャンの間に、Zオフセットがわずかにドリフトし、PETが緊密な範囲の外に動くことを結果としてもたらし得る。このことが起こる場合には、モータが再起動されて、PETを緊密な範囲の中にステップ的に戻す。緊密な範囲の許容差は、所望の測定精度と、一定のzオフセットモータの動きの最小化とによるバランス設定である。
【0051】
実時間画像化の間に、PETリングは、勝者群の最小二乗フィットラインによって規定されるので、マイクロレンズアセンブリにおけるPETの既知の物理的位置に基づくスクリーン上の固定された位置(半径)で表示される。各々の画像フレームのzオフセットは、PETリングが所望の位置の中または位置の外で終わるように調節される。
【0052】
最終結果は、Zオフセットの補正された画像がスクリーン上に表示され、かつ保存された画像ファイルに格納されて、正しい臨床的測定が直接的な態様で実行されることを可能にする。図8は、zオフセットが正しく設定されている冠状動脈のOCT画像である。従って、血管径が、2.55mmとして正しく測定される。図9は、zオフセットがレンズアセンブリ内に位置決めされているように、zオフセットが誤って設定されている冠状動脈のOCT画像である。従って、血管径が、2.97mmとして誤って測定される。
【0053】
図10は、zオフセットが保護用PETカバーの外側に位置決めされているように、zオフセットが誤って設定されている冠状動脈のOCT画像である。従って、血管径が、2.00mmとして誤って測定される。従って、本発明は、OCT干渉計における基準経路とサンプル経路との等化を決定する方法を提供することにより、それによって、対象の物体の正確な計測を提供する。
【0054】
図11は、本発明の局面に従って発生された別のOCT画像である。特に、それは、マイクロレンズPET層(最も内側)100と、画像ワイヤプラスチックシース(中間)102とから発生する特徴のあるリング反射を示すカテーテル中心の拡大されたOCT画像である。外側リング104は、画像ワイヤが図11に示されている画像を発生するためにプラスチック管の中に挿入されるそのプラスチック管の内壁のエッジに対応している。しかしながら、管の厚さに起因して、外壁のエッジは画像中に見られない。
【0055】
図11において、PETリングは、標準的な、ドーピングされていないPETを用いて発生される。示されているように、画像ワイヤが、管の側面に向かって押しつけられ、それによって、第三の外側リング104が同心円状でないようにさせられる。
【0056】
上記された実施形態および例が限定ではなく例示として与えられていることは理解されるべきである。本発明の範囲内の様々な変更および修正が、本説明から当業者に明らかになるであろう。
【特許請求の範囲】
【請求項1】
光学要素であって、該光学要素は、
第一の表面および第二の表面を有する膜であって、該膜は、ポリマーと、該ポリマー中に配置されている制御された光後方散乱のための少なくとも1つの後方散乱要素とを備え、該膜は、実質的に歪みのない画像光の伝送を可能にしている、膜
を備えている、光学要素。
【請求項2】
複数の後方散乱要素をさらに備え、前記少なくとも1つの後方散乱要素と、該複数の後方散乱要素の各々は、粒子の寸法を有する粒子であり、該複数の後方散乱要素は、前記ポリマー内に配置されている、請求項1に記載の光学要素。
【請求項3】
前記粒子の寸法は、約1.5μm未満である、請求項2に記載の光学要素。
【請求項4】
前記粒子は、チタン、亜鉛、またはアルミニウムを含んでいる、請求項2に記載の光学要素。
【請求項5】
前記複数の後方散乱要素は、体積で約0.1%のドーピング濃度の濃度を有している、請求項2に記載の光学要素。
【請求項6】
細長い部材をさらに備え、前記膜は、シースを形成するように成形され、該シース内に該細長い部材が配置されて、プローブ先端部の一部分を形成している、請求項1に記載の光学要素。
【請求項7】
画像化プローブであって、該プローブは、
第一の端部および第二の端部を有する細長いセクションを備え、
該第二の端部は、管腔内の画像化が可能なプローブ先端部を形成し、該プローブ先端部は散乱材料を備え、該細長いセクションは、該散乱材料によって反射された光を該細長いセクションの該第一の端部に伝送するように適合されている、
画像化プローブ。
【請求項8】
前記細長いセクションは、光ファイバである、請求項7に記載の画像化プローブ。
【請求項9】
前記細長いセクションは、シースであり、前記プローブは、該シース内に配置された光ファイバをさらに備えている、請求項7に記載の画像化プローブ。
【請求項10】
前記散乱材料は、マトリックス中に分散された複数の光散乱粒子を含んでいる、請求項7に記載の画像化プローブ。
【請求項11】
前記散乱粒子は、チタンを含み、前記マトリックスは、ポリエチレンテレフタレートを含んでいる、請求項10に記載の画像化プローブ。
【請求項12】
レンズアセンブリであって、
マイクロレンズと、
該マイクロレンズと光学的に連絡するビームディレクタと、
実質的に透明な薄膜であって、
(1)光を双方向に伝送することと、
(2)制御された量の後方散乱を発生することと
が可能である、薄膜と
を備え、
該薄膜は、該ビームディレクタの一部分を囲んでいる、
レンズアセンブリ。
【請求項13】
前記制御された量の後方散乱は、少なくとも1つの画像化システムパラメータの較正に対して、画像化システムにおいて基準点を発生するために少なくとも十分な光量である、請求項12に記載のレンズアセンブリ。
【請求項14】
前記実質的に透明な薄膜は、複数の散乱粒子を含んでいる、請求項12に記載のレンズアセンブリ。
【請求項15】
前記マイクロレンズは、光ファイバと光学的に連絡する、請求項12に記載のレンズアセンブリ。
【請求項16】
前記実質的に透明な薄膜は、画像化プローブ先端部を形成するように成形される、請求項12に記載のレンズアセンブリ。
【請求項17】
光コヒーレンストモグラフィーシステムを較正する方法であって、該方法は、
サンプルから反射された光に応答してスキャンデータを発生することであって、該反射された光は、双方向性の実質的に透明な光学要素を通過する、ことと、
該双方向性の実質的に透明な光学要素内に配置された散乱要素から反射された散乱光に応答して基準データを発生することと、
次のスキャンの相対的位置を決定するために、該基準データに応答して該光コヒーレンストモグラフィーシステムを較正することと
を包含する、方法。
【請求項18】
前記スキャンデータは、一組の角度と、一組の放射方向距離とを含んでいる、請求項17に記載の方法。
【請求項19】
前記基準データは、一組の角度と、一組の放射方向距離とを含んでいる、請求項17に記載の方法。
【請求項20】
前記較正するステップは、リングパターン、渦巻きパターン、負の傾斜値、および反転状態からなる群から選択されたパターンとして基準データを探索することを含んでいる、請求項17に記載の方法。
【請求項21】
光学要素を製作する方法であって、該方法は、
動物の管腔内使用に適した膜材料を選択することと、
該膜材料中の分散に適したドーパントを選択することであって、該ドーパントは、光源に応答して光の散乱に適合することと、
ドーピングされた膜の半径方向のスキャンが規定されたパターンを発生するようにドーパントの体積濃度を決定することと、
該決定されたドーパントの体積濃度を実質的に取得するために、該選択されたドーパントによって該膜をドーピングすることと、
動物の管腔内使用のために該膜を成形することと
を包含する、方法。
【請求項22】
前記膜は、ポリエチレンテレフタレートを含んでいる、請求項21に記載の方法。
【請求項23】
前記ドーパント体積濃度は、体積で約0.1%のドーピング濃度である、請求項21に記載の方法。
【請求項24】
前記選択されたドーパントは、酸化物を含んでいる、請求項21に記載の方法。
【請求項25】
前記規定されたパターンは、リング、渦巻き、負の傾斜値、および反転状態からなる群から選択される、請求項21に記載の方法。
【請求項1】
光学要素であって、該光学要素は、
第一の表面および第二の表面を有する膜であって、該膜は、ポリマーと、該ポリマー中に配置されている制御された光後方散乱のための少なくとも1つの後方散乱要素とを備え、該膜は、実質的に歪みのない画像光の伝送を可能にしている、膜
を備えている、光学要素。
【請求項2】
複数の後方散乱要素をさらに備え、前記少なくとも1つの後方散乱要素と、該複数の後方散乱要素の各々は、粒子の寸法を有する粒子であり、該複数の後方散乱要素は、前記ポリマー内に配置されている、請求項1に記載の光学要素。
【請求項3】
前記粒子の寸法は、約1.5μm未満である、請求項2に記載の光学要素。
【請求項4】
前記粒子は、チタン、亜鉛、またはアルミニウムを含んでいる、請求項2に記載の光学要素。
【請求項5】
前記複数の後方散乱要素は、体積で約0.1%のドーピング濃度の濃度を有している、請求項2に記載の光学要素。
【請求項6】
細長い部材をさらに備え、前記膜は、シースを形成するように成形され、該シース内に該細長い部材が配置されて、プローブ先端部の一部分を形成している、請求項1に記載の光学要素。
【請求項7】
画像化プローブであって、該プローブは、
第一の端部および第二の端部を有する細長いセクションを備え、
該第二の端部は、管腔内の画像化が可能なプローブ先端部を形成し、該プローブ先端部は散乱材料を備え、該細長いセクションは、該散乱材料によって反射された光を該細長いセクションの該第一の端部に伝送するように適合されている、
画像化プローブ。
【請求項8】
前記細長いセクションは、光ファイバである、請求項7に記載の画像化プローブ。
【請求項9】
前記細長いセクションは、シースであり、前記プローブは、該シース内に配置された光ファイバをさらに備えている、請求項7に記載の画像化プローブ。
【請求項10】
前記散乱材料は、マトリックス中に分散された複数の光散乱粒子を含んでいる、請求項7に記載の画像化プローブ。
【請求項11】
前記散乱粒子は、チタンを含み、前記マトリックスは、ポリエチレンテレフタレートを含んでいる、請求項10に記載の画像化プローブ。
【請求項12】
レンズアセンブリであって、
マイクロレンズと、
該マイクロレンズと光学的に連絡するビームディレクタと、
実質的に透明な薄膜であって、
(1)光を双方向に伝送することと、
(2)制御された量の後方散乱を発生することと
が可能である、薄膜と
を備え、
該薄膜は、該ビームディレクタの一部分を囲んでいる、
レンズアセンブリ。
【請求項13】
前記制御された量の後方散乱は、少なくとも1つの画像化システムパラメータの較正に対して、画像化システムにおいて基準点を発生するために少なくとも十分な光量である、請求項12に記載のレンズアセンブリ。
【請求項14】
前記実質的に透明な薄膜は、複数の散乱粒子を含んでいる、請求項12に記載のレンズアセンブリ。
【請求項15】
前記マイクロレンズは、光ファイバと光学的に連絡する、請求項12に記載のレンズアセンブリ。
【請求項16】
前記実質的に透明な薄膜は、画像化プローブ先端部を形成するように成形される、請求項12に記載のレンズアセンブリ。
【請求項17】
光コヒーレンストモグラフィーシステムを較正する方法であって、該方法は、
サンプルから反射された光に応答してスキャンデータを発生することであって、該反射された光は、双方向性の実質的に透明な光学要素を通過する、ことと、
該双方向性の実質的に透明な光学要素内に配置された散乱要素から反射された散乱光に応答して基準データを発生することと、
次のスキャンの相対的位置を決定するために、該基準データに応答して該光コヒーレンストモグラフィーシステムを較正することと
を包含する、方法。
【請求項18】
前記スキャンデータは、一組の角度と、一組の放射方向距離とを含んでいる、請求項17に記載の方法。
【請求項19】
前記基準データは、一組の角度と、一組の放射方向距離とを含んでいる、請求項17に記載の方法。
【請求項20】
前記較正するステップは、リングパターン、渦巻きパターン、負の傾斜値、および反転状態からなる群から選択されたパターンとして基準データを探索することを含んでいる、請求項17に記載の方法。
【請求項21】
光学要素を製作する方法であって、該方法は、
動物の管腔内使用に適した膜材料を選択することと、
該膜材料中の分散に適したドーパントを選択することであって、該ドーパントは、光源に応答して光の散乱に適合することと、
ドーピングされた膜の半径方向のスキャンが規定されたパターンを発生するようにドーパントの体積濃度を決定することと、
該決定されたドーパントの体積濃度を実質的に取得するために、該選択されたドーパントによって該膜をドーピングすることと、
動物の管腔内使用のために該膜を成形することと
を包含する、方法。
【請求項22】
前記膜は、ポリエチレンテレフタレートを含んでいる、請求項21に記載の方法。
【請求項23】
前記ドーパント体積濃度は、体積で約0.1%のドーピング濃度である、請求項21に記載の方法。
【請求項24】
前記選択されたドーパントは、酸化物を含んでいる、請求項21に記載の方法。
【請求項25】
前記規定されたパターンは、リング、渦巻き、負の傾斜値、および反転状態からなる群から選択される、請求項21に記載の方法。
【図1】

【図2】

【図3】
【図3A】

【図4a】
【図4b】
【図4c】

【図5A】

【図5B】
【図6】

【図7】
【図8】

【図9】

【図10】

【図11】
【図2】
【図3】
【図3A】
【図4a】
【図4b】
【図4c】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公表番号】特表2011−503575(P2011−503575A)
【公表日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願番号】特願2010−533124(P2010−533124)
【出願日】平成20年11月12日(2008.11.12)
【国際出願番号】PCT/US2008/012701
【国際公開番号】WO2009/064410
【国際公開日】平成21年5月22日(2009.5.22)
【出願人】(509128672)ライトラブ イメージング, インコーポレイテッド (13)
【Fターム(参考)】
【公表日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願日】平成20年11月12日(2008.11.12)
【国際出願番号】PCT/US2008/012701
【国際公開番号】WO2009/064410
【国際公開日】平成21年5月22日(2009.5.22)
【出願人】(509128672)ライトラブ イメージング, インコーポレイテッド (13)
【Fターム(参考)】
[ Back to top ]