
一機の低地球軌道衛星を利用する位置決定
【課題】一機の低地球軌道衛星を利用する位置決定。
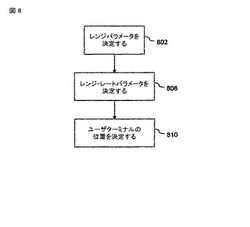
【解決手段】低地球軌道衛星通信システム100におけるユーザターミナル(例えば、移動無線電話)の位置を決定するためのシステム及び方法。システムは、ユーザターミナル106、既知の位置及び既知の速度である少なくとも1つの衛星104、そして衛星104を介してユーザターミナル106と通信するためのゲートウェイ102(即ち、地上基地局)とを備える。方法は、レンジパラメータを決定する工程802及びレンジレートパラメータを決定する工程806を含む。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、衛星とユーザターミナルとの間の相対的な半径方向速度を示す。そして、地球表面上におけるユーザターミナルの位置は、レンジパラメータと、レンジレートパラメータと、そして衛星の既知の位置及び既知の速度とに基づいて決定される810。
【解決手段】低地球軌道衛星通信システム100におけるユーザターミナル(例えば、移動無線電話)の位置を決定するためのシステム及び方法。システムは、ユーザターミナル106、既知の位置及び既知の速度である少なくとも1つの衛星104、そして衛星104を介してユーザターミナル106と通信するためのゲートウェイ102(即ち、地上基地局)とを備える。方法は、レンジパラメータを決定する工程802及びレンジレートパラメータを決定する工程806を含む。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、衛星とユーザターミナルとの間の相対的な半径方向速度を示す。そして、地球表面上におけるユーザターミナルの位置は、レンジパラメータと、レンジレートパラメータと、そして衛星の既知の位置及び既知の速度とに基づいて決定される810。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、衛星を利用した物体の位置決定に関する。より具体的には、本発明は、衛星通信システム内のユーザターミナルの位置を、その通信信号の特性を利用して決定するための方法に関する。
【背景技術】
【0002】
衛星に基く代表的な通信システムは、少なくとも一つの地上基地局(以下、ゲートウェイという)と、少なくとも一つのユーザターミナル(例えば、移動電話)、及び、ゲートウェイとユーザターミナルとの間の通信信号を中継する少なくとも一機の衛星を含んでいる。このゲートウェイは、一つのユーザターミナルから別のユーザターミナルへのリンク、又は、地上電話システムのような通信システムを提供する。
【0003】
多数のシステム利用者の間で情報を転送するために、様々な多元接続通信システムが開発されている。これらの手法には、時分割多元接続(TDMA)、周波数分割多元接続(FDMA)、及び、符号分割多元接続(CDMA)のスペクトル拡散手法があり、それらの基礎はこの分野でよく知られている。CDMA手法の多元接続通信システムへの利用は、「衛星又は地上中継機を利用したスペクトル拡散多元接続通信システム」と題する、1990年2月13日に発行された米国特許第4,901,307号、並びに、「個々の受容体の位相時間とエネルギーを追跡するための、スペクトル拡散通信システムにおいて全スペクトルで照射されたパワーを用いる方法及び装置」と題する、1995年1月4日に出願された米国特許出願番号第08/368,570号に開示されている。これらはいずれも本発明の譲受人に譲渡されたもので、参照によりここに組込まれたこととする。
【0004】
上記の特許文献は、多元接続通信システムを開示しているが、このシステムで、多数の一般に移動式又はリモート式システムの利用者が、ユーザターミナルを採用して他のシステム利用者又は公共電話交換ネットワークのような他の接続されたシステムの利用者との間で通信を行なっている。このユーザターミナルでは、CDMAスペクトル拡散型の通信信号を使って、ゲートウェイ及び衛星を介して通信を行なう。
【0005】
通信衛星は、衛星通信信号を地球表面に投影することによって作られる「スポット」を照射するためのビームを形成している。衛星の代表的なスポット用ビーム・パターンは、所定の通信範囲のパターン中に配置された多数のビームを含んでいる。一般に、各ビームは共通の地域をカバーし、それぞれ異なる周波数帯域を占める多数のいわゆるサブビーム(以下CDMAチャネルという)を備えている。
【0006】
代表的なスペクトル拡散通信システムにおいては、通信信号としての送信用の搬送信号への変調に先立って、一組の予め選択された擬似無作為雑音(PN)コード・シーケンスを使って、情報信号を所定のスペクトル帯域に亘って変調する(即ち「拡散する」)。スペクトル拡散送信の方法としてこの分野でよく知られているPN拡散は、データ信号の帯域よりはるかに広い帯域を有する送信用の信号を生成する。前進通信リンク(即ち、ゲートウェイに始まりユーザターミナルで終わる一つの通信リンク)においては、PN拡散符号、又はバイナリー・シーケンスが、ゲートウェイによって異なるビームで送信された信号を区別するために、また、マルチパス信号を区別するために使われる。これらのPN符号は、一般に一定のサブビーム内の全ての通信信号に共用される。
【0007】
代表的なCDMAスペクトル拡散システムにおいては、チャネル化(channelizing)符号が、特定のユーザターミナル用を意図して、前進リンクの衛星ビームの中で送信された信号を区別するために使われる。即ち、一意的な「チャネル化」直交符号を用いることにより、前進リンク上のユーザターミナルの各々に一意的な直交チャネルが提供される。ウォルシュ関数系が、通常、地上のシステムでは64コード・チップ、衛星システムでは128コード・チップ程度の長さのチャネル化符号を与えるのに一般に用いられる。
【0008】
米国特許第4,901,307号に開示されたような代表的なCDMAスペクトル拡散システムは、前進リンクのユーザターミナル通信について、コヒーレントな変調及び復調の使用を想定している。この方法を用いる通信システムでは、前進リンク用のコヒーレントな位相の参照として、「パイロット」搬送信号(以下「パイロット信号」という)が使われる。即ち、一般にデータ変調を含まないパイロット信号は、ゲートウェイによって、通信範囲の全領域に亘って送信される。一般に、使われるビームの各々について、また、使われる周波数の各々について、それぞれのゲートウェイによってただ一つのパイロット信号が発せられる。これらのパイロット信号は、そのゲートウェイから信号を受信する全てのユーザターミナルに共用される。
【0009】
パイロット信号を用いて、ユーザターミナルは、初期のシステム同期、時刻、周波数、並びに、ゲートウェイから送信された他の信号の位相の追跡を得る。パイロット信号の搬送波の追跡から得られる位相情報は、他のシステムの信号、或いはトラフィック(traffic)信号のコヒーレントな復調のための搬送波位相の参照として用いられる。この手法により、多くのトラフィック信号が位相参照として共通のパイロット信号を共用することが可能になり、追跡機構はより低コストに、また、より効率的になる。
【0010】
ユーザターミナルが通信セッションに参加していない場合(即ち、ユーザターミナルがトラフィック信号を受信も送信もしていない)、ゲートウェイは、情報をページング信号として知られる信号を使って、特定のユーザターミナルに移動させることができる。例えば、特定の移動電話に宛てられた呼び出しがある場合は、ゲートウェイはページング信号を使って移動電話に警告する。ページング信号は、また、トラフィックチャネルの割振り、接続チャネルの割振り、及びシステムオーバーヘッド(overhead)情報を配分するためにも使われる。
【0011】
ユーザターミナルは、接続信号や接続プローブを逆進リンク(即ち、ユーザターミナルに始まりゲートウェイで終わる通信リンク)を用いて送ることにより、ページング信号に応答することができる。この接続信号は、ユーザターミナルが呼を始める時にも使われる。
【0012】
ユーザターミナルとの通信が求められた場合、通信システムは、そのユーザターミナルの位置を決定する必要があるかもしれない。ユーザターミナルの位置情報を必要とするのには、いくつかの動機がある。一つの動機は、システムが通信リンクを提供するには、適切なゲートウェイを選択しなければならない。この動機の一つの側面は、通信リンクの適切なサービス・プロバイダ(例えば、電話会社)への割振りである。一般にサービス・プロバイダは特定の地域に割振られており、その地域内の利用者との全ての通話を扱っている。特定のユーザターミナルとの通信が求められた場合、通信システムは、その利用者が位置する地域に基いてサービス・プロバイダへ呼を割振ることができる。適切な地域を決めるためには、通信システムはユーザターミナルの位置を必要とするのである。同様な動機が、呼が政治的な境界や契約によるサービスに基いてサービス・プロバイダに割振らなければならない場合にも生ずる。
【0013】
衛星利用の通信システムについての位置判定における重要な要求項目は速度である。通信が特定のユーザターミナルで要求される場合、ユーザターミナルに役立つゲートウエイは迅速に選択される必要がある。例えば移動電話ユーザは、呼び出しの際に数秒以上の遅延に耐えられないと思われる。この状態における位置精度の必要性は、速度の必要性よりは重要ではない。10キロメートル(km)未満のエラーが適切とみなされる。対照的に衛星利用位置判定の大部分の従来の方法は、速度よりも精度を強調している。
【0014】
1つの従来の方法は、米国海軍TRANSITシステムが採用しているものである。そのシステムにおいてユーザターミナルは、低軌道(LEO)衛星による信号送信の連続ドップラー測定を実施する。この測定は数分間継続する。このシステムは通常、衛星の2回の通過を必要となるので、100分以上待たなければならない。加えて位置計算がユーザターミナルで実施されるので、衛星はその位置に関する情報(「天体位置表」として知られる)を送信しなければならない。
【0015】
TRANSITシステムは高精度(1メートルの程度)が可能であるが、当該遅延は、商業衛星通信システムにおける使用では受入れできない。
【0016】
他の従来の方法は、ARGOSおよびSARSAT(探査および救助衛星)システムが採用しているものである。その方法においてユーザターミナルは、衛星上の受信装置へ間欠ビーコン信号を送信し、その受信装置が信号の周波数測定をする。衛星は、ユーザターミナルから4つを超えるビーコン信号を受信するならば、ユーザターミナルの位置を通常判定できる。ビーコン信号が間欠であるので、TRANSITシステムによる実施されるもののような広範なドップラー測定は利用できない。
【0017】
他の従来の方法は、全地球位置把握システム(GPS)が採用しているものである。その方法において各衛星は、衛星の天体位置表を含む刻時信号を送信する。ユーザターミナルは、GPS信号を受信すると、それ自体のクロックに関しての送信遅延を測定し、送信している衛星の位置の疑似範囲を決定する。GPSシステムは、二次元位置測定の場合に3個の衛星、および三次元位置測定の場合に第4の衛星を必要とする。
【0018】
GPS方法の1つの欠点は、位置判定に少なくとも3個の衛星を必要とすることである。GPS方法の他の欠点は、計算がユーザターミナルで実施されるので、GPS衛星は、その天体位置表情報を送信しなければならないし、またユーザターミナルは、所要の計算を実施するために計算資源を保有しなければならないということである。
【0019】
全ての上述の方法の1つの欠点は、ユーザターミナルが、これらの方法を使用するために、通信信号を処理するために必要な送信装置または受信装置に加えて、送信装置または受信装置を別途有しなければならないということである。
【0020】
他の従来の方法は、参照としてここに組み込まれる、「二重衛星ナビゲーションシステムと方法」という名称で、1992年6月30日に付与された共通所有される米国特許第5,126,748号に開示されているものである。この方法は、2個の衛星を使用して、三角測量術を通してユーザターミナルの位置を有効に求める。この方法は有用であるが、2個の衛星を必要とする。
【0021】
したがって必要かつ望ましいものは、1個だけの衛星を使用して迅速な位置判定ができる衛星利用位置判定システムである。
【発明の概要】
【0022】
本発明は、低軌道衛星通信システムのような衛星通信システムにおいて1個だけの衛星を使用してユーザターミナル(例えば移動電話)の位置を迅速に求めるシステムと方法である。そのシステムには、ユーザターミナル、既知の位置と既知の速度を有する少なくとも1個の衛星、および衛星を通してユーザターミナルと通信するゲートウエイ(すなわち地上基地局)が含まれる。その方法には、ユーザターミナルと衛星との間の時間的および空間的関係を示すパラメータを決定する工程、ならびにそのパラメータおよび衛星の既知の位置と既知の速度を使用してユーザターミナルの位置を求める工程が含まれる。
【0023】
レンジとレンジレートの2つのパラメータが使用される。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、ユーザターミナルと衛星との間の相対的な(relative)半径方向速度(radial velocity)を示す。
【0024】
本発明の好ましい実施形態において、繰返しの重みつけガウス−ニュートン最小二乗法が使用されて、使用されるパラメータおよび衛星の既知の位置と既知の速度に基づいてユーザターミナルの位置を求めるのに使用される。
【0025】
本発明の1つの利点は、低軌道衛星のような単一の衛星を使用して迅速に位置を求めることができることである。
【図面の簡単な説明】
【0026】
【図1】標準的な衛星通信システムを示す。
【図2】ユーザターミナルに使用される代表的なトランシーバのブロック図である。
【図3】ゲートウエイに使用される代表的な送信装置と受信装置のブロック図である。
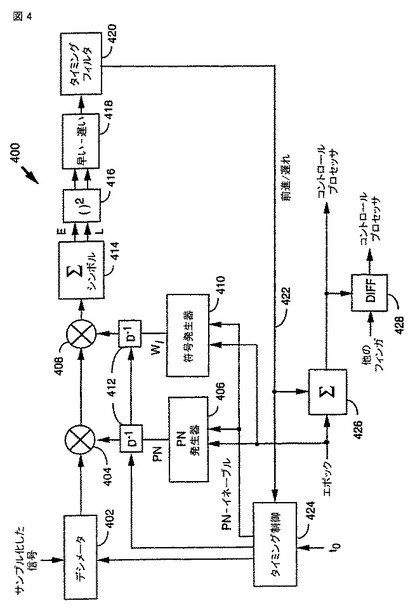
【図4】ユーザターミナルに使用される代表的な時間追跡ループのブロック図である。
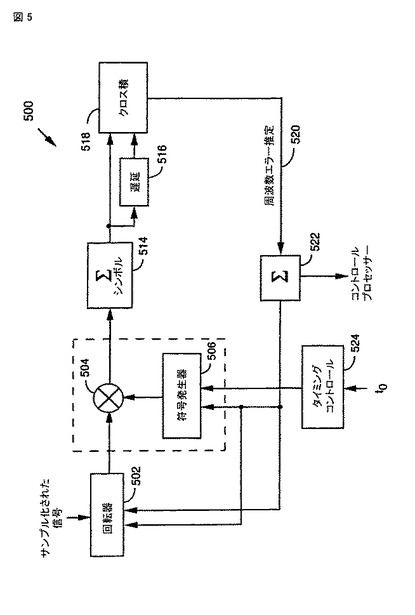
【図5】ユーザターミナルに使用される代表的な周波数追跡ループのブロック図である。
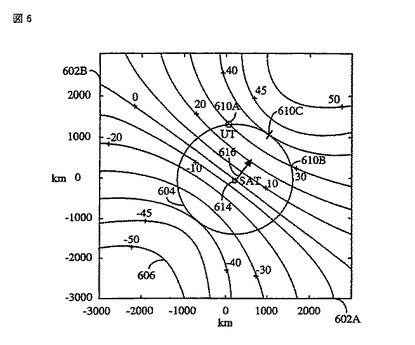
【図6】衛星のサブポイントと衛星に関するレンジ及びレンジレートパラメータに対する等高線の地表上への投影を示す。
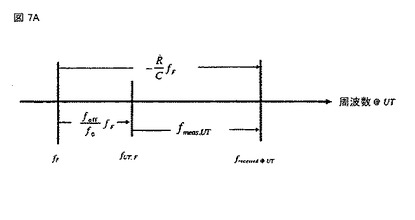
【図7A】ユーザターミナルにおいて測定された信号の周波数の成分の線図である。
【図7B】ゲートウエイにおいて測定された信号の周波数の成分の線図である。
【図8】本発明の好ましい実施例の作動を示すフローチャートである。
【図9】本発明が作動できる代表的な環境を図示するブロック図である。
【発明を実施するための形態】
【0027】
本発明の特徴と利点は、図面と連係してなされる以下の詳細な説明から一層明らかになる。図面における同様な参照数字は同一または機能的に同様な構成部材を示す。加えて参照数字の最も左の桁は、その参照数字が最初に現れる図面を明示する。
【0028】
I.緒言
本発明は、1個だけの低軌道(LEO)衛星を使用して衛星通信システムにおいてユーザターミナルの位置を迅速に求めるシステムと方法である。当業者に分かるように本発明の構想は、衛星とユーザターミナルとの間の相対移動が以下に述べるレンジレート測定を容易にするのに十分であるならば、衛星が非低軌道を走行する衛星システムへ適用できる。
【0029】
本発明の好ましい実施形態は、以下に詳細に説明される。特定の工程、構成および配置が説明されるが、これは単なる説明上のものであることが分かる。当業者は、本発明の精神と範囲から逸脱することなく他の工程、構成および配置を使用できることが分かる。
【0030】
本発明は、4つの部分で説明される。第1に標準的な衛星通信システムが説明される。第2にシステムの位置判定方法に使用されるパラメータが説明される。第3に位置判定方法が物理的な表示で説明される。最後に位置判定方法の実施が説明される。
【0031】
II.標準的な衛星通信システム
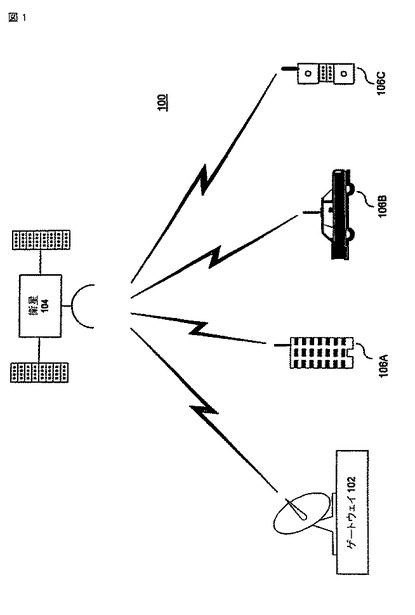
図1は、標準的な衛星通信システム100を示す。衛星通信システム100は、ゲートウエイ102、衛星104、およびユーザターミナル106から成る。ユーザターミナル106は一般に、恒久的な建築物に一般に取り付けられる固定されるユーザターミナル106A、車両に一般に取り付けられる移動ユーザターミナル106B、および一般に手持ち式である可搬式ユーザターミナル106Cの3つの形式のものである。ゲートウエイ102は衛星104を通してユーザターミナル106と通信する。
【0032】
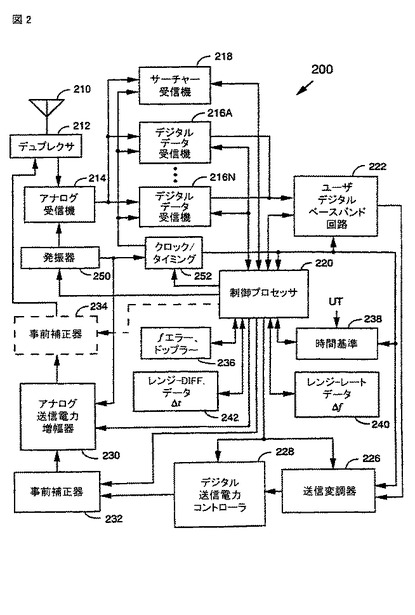
ユーザターミナル106に使用される代表的なトランシーバ200は、図2に図示される。トランシーバ200は、アナログ受信機214へ送信される通信信号を受信する少なくとも1つのアンテナ210を使用し、その受信機において信号がダウンコンバートされ、増幅およびデジタル化される。デゥプレクサエレメント212は、同一のアンテナが送信と受信機能に役立つように通常使用される。しかしながら一部のシステムは、異なる周波数で作動するために別個のアンテナを使用する。
【0033】
アナログ受信機214により出力されるデジタル通信信号は、少なくとも1つのデジタルデータ受信機216Aおよび少なくとも1つのデジタルサーチャー受信機218へ送信される。追加のデジタルデータ受信機216B−216Nは、当業者に分かるように、ユニットの複雑性の受入れレベルに応じて、信号ダイバーシチの所要のレベルを得るために「レイク(Rake)」構成で使用できる。そのように構成される受信装置は、「レイク受信装置」と呼ばれ、また各デジタルデータ受信機216は「フィンガー」と呼ばれる。レイク受信装置のフィンガーは、信号ダイバーシチに使用されるばかりでなく、複数の衛星からの信号を受信するのにも使用される。さらに追加のサーチャー受信機218は、高速信号取得に使用できる。
【0034】
少なくとも1つのユーザターミナル制御プロセッサ220は、デジタルデータ受信機216B−216Nおよびサーチャー受信機218へ電気的に連結される。制御プロセッサ220は、他の機能の中で、基本の信号の処理、タイミング、電力とハンドオフ制御、または信号キャリアに使用される周波数の調整と選択を提供する。制御プロセッサ220により頻繁に実施される他の基本制御機能は、通信信号波形を処理するのに使用されるPNコードシーケンスまたは直交関数の選択と操作である。制御プロセッサ220信号処理は、本発明により使用されるパラメータの決定を含むことができる。相対的タイミングおよび周波数のような信号パラメータの計算は、測定の効率と速度を向上し、かつ制御処理資源の割当を改善するために追加または別個の専用回路の使用を含むことができる。
【0035】
デジタルデータ受信機216A−216N用の出力部は、ユーザターミナル内のユーザデジタルベースバンド回路222へ電気的に連結される。ユーザデジタルベースバンド回路222は、ユーザターミナルユーザとの間で情報の送信に使用される処理エレメントと表示エレメントを含む。すなわち一時または長期デジタルメモリのような信号またはデータ格納エレメント、表示画面、スピーカ、キーパッドターミナルおよびハンドセットのような入力と出力デバイス、A/Dエレメント、ボコーダおよび他の音声とアナログ信号処理エレメントなどであり、全ては、技術上既知のエレメントを使用するユーザベースバンド回路の構成部分を形成する。ダイバーシチ信号処理が採用されるならば、ユーザデジタルベースバンド回路222は、ダイバーシチコンビナーとデコーダーを含むことができる。これらのエレメントの一部は、制御プロセッサ220の制御の下で、またはそれと通信して作動できる。
【0036】
音声または他のデータが、出力メッセージまたはユーザターミナルで生じる通信信号として生成されるとき、ユーザデジタルベースバンド回路222は、所要のデータを送信するために、受信、格納、処理または生成するのに使用される。
【0037】
ユーザデジタルベースバンド回路222は、このデータを制御プロセッサ220の制御の下で作動する送信変調器226へ送信する。送信変調器226の出力は、電力コントローラ228へ送信され、その電力コントローラは、出力信号をアンテナ210からゲートウエイへ最終的に送信するために送信電力増幅器230へ出力電力制御を供給する。
【0038】
トランシーバ200は、1つあるいはそれ以上の事前補正要素あるいは事前補正器232及び234も使用できる。これらの事前補正器の動作は、参照してここに組み込まれている出願第 号(譲渡される、弁理士ドケット番号PA338)を有する名称が「非対地静止衛星システムのための時間および周波数事前補正(Time And Frequency Precorrection For Non-Geostationary Satellite Systems)」の同時係属の共通所有出願に開示されている。好ましくは、事前補正は、ベースバンド周波数のデジタル電力コントローラ228の出力に生じる。周波数調整を含むベースバンドスペクトル情報は、送信電力増幅器230で実行されるアップ変換中適切な中心周波数に変換される。事前補正あるいは周波数調整は、当該技術分野で周知の技術を使用して行われる。例えば、事前補正は、信号をejωtの数と乗算するのに等しい複素信号回転によって行うことができる。ここでωは既知の衛星の天体位置表および所望のチャネル周波数に基づいて計算される。これは、通信信号が同相(I)チャネルおよび直角位相(Q)チャネルとして処理される場合に非常に有用である。直接デジタル合成装置は、回転積のいくつかを生成するために使用できる。それとは別に、2進シフト加算および減算を使用し、一連の別個の回転を実行し、所望の全回転を生じる座標回転デジタル計算要素が使用できる。このような技術および関連ハードウェアは当該技術分野で十分理解される。
【0039】
代替例として、事前補正要素234は、送信電力増幅器230の出力の送信路に配置し、出力信号の周波数を調整できる。これは、送信波形のアップ変換あるいはダウン変換のような周知の技術を使用して行われる。しかしながら、アナログ送信機の出力の周波数を変えることは、波形を整形するためにしばしば一連のフィルタがあるためにより困難であり得る、この時点の変化はフイルタリング処理を干渉し得る。それとは別に、事前補正要素234は、ユーザターミナルのアナログアップ変換・変調段(230)のための周波数選択あるいは制御機構の一部を形成できるので、適切に調整された周波数は、デジタル信号を所望の送信周波数に1ステップで変換するために使用される。
【0040】
受信通信信号、あるいは1つあるいはそれ以上の共有資源信号のための1つあるいはそれ以上の測定信号パラメータに対応する情報あるいはデータは、当該技術分野で公知のいろいろな技術を使用してゲートウェイに送信できる。例えば、情報は、別個の情報信号として転送できるしあるいはユーザデジタルベースバンド回路222によって作成された他のメッセージに付加できる。それとは別に、この情報は、制御プロセッサ220の制御の下で送信変調器226あるいは送信電力コントローラ228によって所定の制御ビットとして挿入できる。
【0041】
デジタルデータ受信機216A−Nおよびサーチャー受信機218は、特定の信号を復調および追跡するために信号相関要素で構成されている。サーチャー受信機218は、パイロット信号、あるいは他の比較的固定パターンの強い信号を探索するために使用されるのに対して、データ受信機216A−Nは、パイロット信号を追跡するあるいは検出パイロット信号に関連した信号を復調するために使用される。したがって、これらの装置の出力は、本発明のパラメータを計算するために使用される情報を提供するように監視できる。受信通信信号あるいは共有資源信号でユーザターミナル106によって行われる測定の情報は、当該技術分野で公知のいろいろな技術を使用してゲートウェイに送信できる。例えば、情報は、別個のデータ信号として転送できるしあるいはユーザデジタルベースバンド回路222によって作成された他のメッセージに付加できる。テータ受信機216(A−N)は、復調される信号のために現周波数およびタイミング情報を制御プロセッサ220に供給するように監視できる周波数追跡要素も使用する。これは図4および図5に関して下記にさらに述べられる。
【0042】
制御プロセッサ220は、このような情報を使用し、必要に応じて同じ周波数バンドにスケールされる場合、局部発振器周波数に基づいて、期待された周波数から受信信号がどの程度までオフセットされたか決定する。周波数オフセット、周波数エラーおよびドップラーシフトに関連したこの情報および他の情報は、所望のように、1つあるいはそれ以上のエラー/ドップラー記憶あるいはメモリ要素236に記憶できる。この情報は、その動作周波数を調整するために制御プロセッサ220によって使用することができるかあるいはいろいろな通信信号を使用してゲートウェイに転送できる。
【0043】
少なくとも1つの時間基準要素238は、日付および時間のような時間情報を発生し、記憶するために使用され、衛星位置を決定するのに役立つ。時間は、周期的に記憶および更新できる。この時間はゲートウェイによって周期的に供給されてもよい。さらに、現時間は、ユーザターミナルがターンオフされるような非活動モードに入る度に記憶される。この時間値は、様々な時間依存信号パラメータおよびユーザターミナル位置変化を決定するためにターンオン時間とともに使用される。
【0044】
付加的記憶あるいはメモリ要素240および242は、下記にさらに詳細に述べられるパラメータについての特定の情報を記憶するために使用できる。例えば、メモリ要素240は、2つの到着信号間の相対周波数オフセットの差のようなレンジレートパラメータに対して行われるユーザターミナル測定値を記憶できる。
【0045】
メモリ要素242は、2つの信号に対する到着時間の差のようなレンジ差パラメータに対するユーザターミナル測定値を記憶するために使用できる。これらのメモリ要素は、当該技術分野で周知の構造および回路を使用し、個別あるいは別個の要素あるいはこの情報が後の検索のために制御されたやり方で記憶されるより大きな統合された構造として形成できる。
【0046】
図2に示されるように、局部あるいは基準発振器250は、入来信号を所望の周波数でベースバンドにダウン変換するためにアナログ受信機214のための基準として使用される。それは信号が所望のベースバンド周波数に到達するまで、所望のように、複数の中間変換ステップでも使用できる。図示のように、発振器250は、ベースバンドから逆方向リンク送信のための所望の搬送波周波数にアップ変換するためのアナログ送信機230のための基準およびタイミング回路252のための周波数標準あるいは基準としても使用される。タイミング回路252は、時間追跡回路、デジタル受信機216A−Nおよび218の相関器、送信変調器226、時間基準要素238および制御プロセッサ220のようなユーザターミナル200内の他の段あるいは処理要素のためのタイミング信号を発生する。タイミング回路252は、プロセッサ制御の下で、タイミングあるいはクロック信号の相対タイミングの遅れあるいは進みのための遅延を発生するようにも構成できる。すなわち、時間追跡は、所定の量だけ調整できる。これによってまた、コードの適用は、一般的には1つあるいはそれ以上のチップ期間だけ、‘正常’タイミングから進めるかあるいは遅らすことができるので、コードを形成するPNコードあるいはチップは所望のように異なるタイミングで適用できる。
【0047】
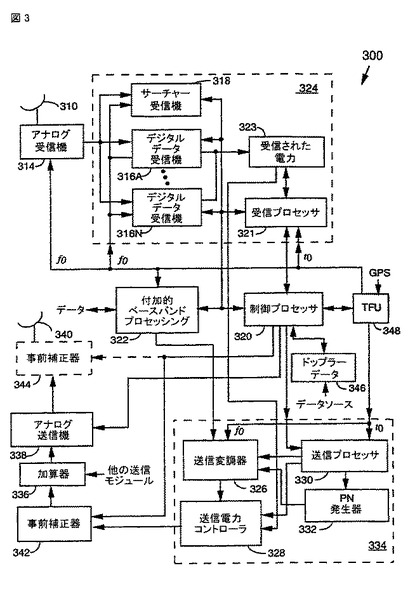
ゲートウェイ102で使用するための典型的な送信および受信装置300は図3に示されている。図3に示されたゲートウェイの一部は、当該技術分野で周知のいろいろな方式を使用してダウン変換され、増幅され、デジタル化される通信信号を受信するためのアンテナ310に接続されている1つあるいはそれ以上のアナログ受信機314を有する。多数のアンテナ310はいくつかの通信システムで使用される。アナログ受信機314によって出力されるデジタル化信号は、一般に324で破線によって示される少なくとも1つのデジタル受信機モジュールの入力として供給される。
【0048】
所定の変更が当該技術分野で公知だが、各デジタル受信機モジュール324は、ケートウェイ102と1つのユーザターミナル106との間の通信を管理するために使用される信号処理要素に対応する。1つのアナログ受信機314は、多数のデジタル受信機モジュール324に対する入力を供給でき、このような多数のモジュールは、任意の所与の時間に処理される衛星ビーム信号および可能なダイバーシチモード信号の全てを受け入れるために一般的にはゲートウェイ102で使用される。各デジタル受信機モジュール324は1つあるいはそれ以上のデジタルデータ受信機316およびサーチャー受信機318を有する。サーチャー受信機318は、一般にパイロット信号以外の信号の適切なダイバーシチモードを検索し、いくつかのサーチャーが検索速度を増加させるために平行して使用することができる。通信システムで実行される場合、多数のデジタルデータ受信機316A〜316Nがダイバーシチ信号受信のために使用される。
【0049】
デジタルデータ受信機316の出力は、当該技術分野で公知である装置を含む次のベースバンド処理要素322に供給され、ここでさらに詳細に示されていない。典型的なベースバンド装置は、マルチパス信号を結合して各ユーザのための1つの出力にするダイバーシチ結合器およびデコーダを含んでいる。典型的なベースバンド装置は、出力データを一般的にはデジタルスイッチあるいはネットワークに供給するインタフェース回路も含んでいる。ボコーダ、データモデム、およびデジタルデータスイッチング要素および記憶要素のような要素であるがこれに限定されないいろいろな他の公知の要素はベースバンド処理要素322の一部を形成してもよい。これらの要素は、1つあるいはそれ以上の送信モジュール334へのデータ信号の転送を制御あるいは指令するように作動する。
【0050】
ユーザターミナル106に送信される信号は、それぞれ1つあるいはそれ以上の適切な送信モジュール334に電気的に結合される。典型的なゲートウェイは、多数のこのような送信モジュール334を使用し、サービスを多数のユーザターミナル106に同時に、いくつかの衛星およびビームのために同時に供給する。ゲートウェイ102によって使用される送信モジュール334の数は、システムの複雑さ、通常見えている衛星の数、ユーザ容量、選択されたダイバーシチ度等を含む、当該技術分野で周知の因子によって決定される。
【0051】
各送信モジュール334は、送信のためのデータをスペクトル拡散変調し、出力デジタル信号のために使用される送信電力を制御するデジタル送信電力コントローラ328に電気的に結合される出力を有する送信変調器326を含んでいる。デジタル送信電力コントローラ328は、一般に混信減少および資源割り当ての目的のために最少の電力レベルを適用するが、送信パスおよび他のパスの転送特性の減衰を補償する必要がある場合、適切な電力レベルを適用する。PN発生器332は、信号を拡散する際に送信変調器326によって使用される。この符号生成は、ゲートウェイ102で使用される1つあるいはそれ以上の制御プロセッサあるいは記憶要素の機能部も形成できる。
【0052】
送信電力コントローラ328の出力は、他の送信電力制御回路からの出力と加算される加算器336に転送される。これらの出力は、送信電力コントローラ328の出力と同じ周波数でおよび同じビーム内で他のユーザターミナル106に送信するための信号である。加算器336の出力は、デジタル/アナログ変換、適切なRF搬送波周波数への変換、更なる増幅、フィルタリング、およびユーザターミナル106に放射する1つあるいはそれ以上のアンテナ340のためにアナログ送信機338に供給される。アンテナ310および340は、通信システムの複雑さおよび構成に依存する同じアンテナでもよい。
【0053】
少なくとも1つのゲートウェイ制御プロセッサ320は、受信機モジュール324、送信モジュール334、およびベースバンド回路322に電気的に結合されている。これらの装置は、互いから物理的に分離されてもよい。制御プロセッサ320は、コマンド信号および制御信号を供給し、これらに限定されないが、信号処理、タイミング信号発生、電力制御、ハンドオフ制御、ダイバーシチ結合およびシステムインタフェースのような機能を行う。さらに、制御プロセッサ320は、PN拡散コード、直交コードシーケンス、およびユーザ通信で使用するための特定の送信機および受信機あるいはモジュールを割り当てる。さらに、制御プロセッサ320は、パラメータを計算し、本発明の位置決め方法を実行するために使用することもできる。
【0054】
制御プロセッサ320は、パイロットの生成および出力、同期、ページングチャネル信号および送信電力コントローラ328とのそれらの結合を制御する。パイロットチャネルは、単にデータによって変調されない信号であり、反復不変パターンあるいは非変化フレーム構造を使用してもよい。すなわち、パイロット信号チャネルを形成するために使用される直交機能は、一般に全1あるいは0、あるいは散在された1および0の周知の反復パターンのような一定値を有する。
【0055】
制御プロセッサ320は送信モジュール334あるいは受信モジュール324のようなモジュールの要素に直接電気的に結合できるが、各々のモジュールは一般にそのモジュールの要素を制御する送信プロセッサ330あるいは受信プロセッサ321のようなモジュール専用プロセッサを備える。このように、好ましい実施形態では、制御プロセッサ320は、図3に示されるように、送信プロセッサ330および受信プロセッサ321に電気的に結合されている。このように、単一制御プロセッサ320は、多数のモジュールおよび資源の動作をより効率的に制御できる。送信プロセッサ330は、パイロット、同期、ページング信号およびトラフィックチャネル信号の生成及び信号電力、および電力コントローラ328へのそれらのそれぞれの結合を制御する。受信プロセッサ321は、探索(searching)、復調のためのPN拡散コード、受信電力を監視することを制御する。プロセッサ321は、本発明の方法で使用される信号パラメータを決定する際に使用できるかあるいはこのようなパラメータに関するユーザターミナルから受信される情報を検出あるいは転送でき、それによって制御プロセッサ320の負担を減少させる。
【0056】
本発明の実施形態を実現するために、一つ或いはそれ以上の事前補正器或いは周波数事前補正要素342及び344が使用されてよい。好ましくは、事前補正要素342はベースバンド周波数においてディジタル電力コントローラのディジタル出力の周波数を調整するために使用される。ユーザターミナルにおいて、周波数調整を含んだベースバンドスペクトル情報はアナログ送信機338で実行されるアップコンバージョン(up−conversion)の間に適切な中心周波数に変換される。周波数事前補正は上述された複素信号回転のような、本分野で既知の技術を用いて達成され、そこで回転の角度は既知の衛星の天体位置表及び望まれるチャネル周波数に基づいて計算される。ユーザターミナルにおいて、他の信号回転技術及び関連したハードウェアを本発明の精神と範囲から逸脱せずに使用することが出来る。
【0057】
周波数事前補正に加えて、信号或いはPN符号の相対タイミングを変えるために時間事前補正を設けるようとする要請があるかもしれない。これは信号がベースバンドで生成され電力コントローラ328によって出力される前に、符号の生成及びタイミング或いは他の信号パラメータのタイミングのいずれかを調整することによって一般に達成される。例えばコントローラ320は、信号が送信変調器326によって処理され電力コントローラ328によってさまざまな衛星へと送信される時と同様に、符号が生成される時、それらの相対タイミング及び信号への適用を決定することができる。しかしながら、事前補正要素342及び344の一部を構成するか或いはそれらに類似の(示されない)分離したユニットとして既知の時間事前補正要素或いは回路は、望まれるなら、周波数事前補正要素なしで或いはそれらに追加して使用することができる。
【0058】
図3において、事前補正器342は加算器336の前の伝送パス上に配置されて示される。このことは望まれるならば各ユーザターミナルの信号に対して個別の制御を可能にする。しかしながら、加算器336の後で事前補正が行われる場合は単一の周波数事前補正要素を使用することができる。なぜなら、ユーザターミナルはゲートウェイから衛星への同じ伝送パスを共有するからである。
【0059】
代わりとして、事前補正器344は、良く知られた技術を用いて出て行く信号の周波数を調整するためにアナログ送信機338の出力の伝送パス上に配置することができる。しかしながら、アナログ送信機の出力で周波数を変えることはより困難になる可能性があり、信号のフィルタリング過程と干渉するかもしれない。或いは、アナログ送信機338の出力周波数は、通常の中心周波数からずらされた(offset)シフトされた出力周波数を提供するために制御プロセッサ320によって直接調整することができる。
【0060】
出て行く信号に課せられる周波数補正の量は、それを介して通信が確立されているゲートウェイと各衛星との間の既知のドップラーに基づいている。衛星のドップラーの責任をとる(account for)ために必要とされるシフトの量は既知の衛星軌道の位置データを用いて制御プロセッサ320によって計算することができる。このデータは、ルックアップテーブル或いはメモリ要素のような一つ或いはそれ以上の記憶要素346に保持するか或いはそこから引き出すことができる。このデータはまた、望まれるならば他のデータ源から供給されてもよい。RMAおよびROM回路のような様々な良く知られた装置、或いは磁気記憶装置が記憶要素346を作るために使用できる。この情報は、指定された時刻にゲートウェイによって使用されている各衛星に対してドップラー調整を確立するために使用される。
【0061】
図3に示されるように、時間及び周波数ユニット(TFU)348はアナログ受信機314に対して参照周波数信号を提供する。GPS受信機からの万国(Universal)時間信号はいくつかの応用でこの過程の一部として使用される。望まれるならば、それはまた複数の中間変換ステップで使用することができる。TFU348はまたアナログ送信機338に対する参照としても役立つ。TFU348はまたディジタル受信機316A−N及び318の相関器、送信変調器326、制御プロセッサ320のようなゲートウェイの送信及び受信装置300内の他の段或いは処理要素に対してタイミング信号を供給する。TFU348はまた望まれるならば、プロセッサ制御の下、予め定められた量だけ(クロック)信号の相対タイミングを遅らせたり進めたりするように構成される。
【0062】
タイミング測定を実行するためのある実施形態が図4に示され、ユーザターミナルに対する時間追跡ループ400を示す。このタイプの時間追跡ループは当該技術分野で知られているようにタウ(Tau)ディザ(Dither)タイプと呼ばれる。図4において、アナログ受信機から入ってくる通信信号は通常オーバーサンプルされ(oversampled)、次にデシメータ402に入力される。デシメータ402は受信機の後の段へただ一定のサンプルを転送するために予め選択されたレートとタイミングで動作する。
【0063】
間引かれた(decimated)サンプルは、信号を逆拡散するためにPN発生器或いはソース(source)406によって供給される適切なシステムPN拡散符号と共に結合させるために通常は乗算器である結合要素404へ転送される。逆拡散された信号は結合要素408へと転送される。そこにおいて逆拡散された信号は、データを得るために、使用されるならば符号発生器或いはソース410によって供給される適切な直交符号関数Wiと共に結合される。直交符号関数は通信信号チャネルを作るために使用されるものである。一般に、他の強い信号が使用できても、パイロット及びページング信号がこの目的のために使用される。それゆえ直交符号は、当該技術分野で知られているように、一般にパイロット或いはページング信号を生成するために使用されるものである。或いは、当該技術分野で知られているように、PN拡散及び直交符号は一緒に結合して、そして単一ステップでサンプルと結合することができる。
【0064】
時間追跡回路は上述した米国特許第4,901,307号で開示された“早い/遅い”方式を使用することができる。このアプローチでは、入って来る信号のとディジタル受信機216のタイミングが同じ或いはそろっている程度が、通常のチップ時間からずれたところで入って来るデータストリームをサンプリングすることによって測定される。このオフセットはプラス或いはマイナスの半PN符号チップ周期のいずれかであり、それぞれ遅い或いは早いのいずれかとして呼ばれる。
【0065】
プラス或いはマイナスのオフセットデータのタイミングが通常の逆拡散された入って来る信号のピークのタイミングから対称的にずれるならば、“遅い”及び“早い”サンプリング値の間に形成される差はゼロである。即ち、“遅い”及び“早い”信号の間の差を形成することによって作られる値は、半チップのオフセットの中心が受信された信号の“時間どおり(on−time)”のタイミングにあるならばゼロに向かう。もし受信機216によって使用される相対タイミングが受信された信号のタイミングを正確に追跡しないで、入ってくる信号データに対して相対的に早いならば、“遅い−マイナス−早い”の差は正の値の補正信号を生ずる。他方、もし信号のタイミングが遅すぎるならば、差は負の値の補正信号を生ずる。逆の或いは他の関係も望まれるならば使用できることは容易に明らかである。
【0066】
この技術を実現するために、デシメータの出力は通常信号を復調するために使用されるより半チップ早く生ずるように制御される。デシメータの出力は次に逆拡散され復号され、その結果のデータは累算器414において予め選択された期間(通常は1シンボル期間)に渡って累算される。累算されたシンボルデータはシンボルエネルギーを与え、それは二乗要素416で二乗されて“早い”信号に対して非負の大きさの値を与える。
【0067】
サンプルのもう一つのセットは、累算器414を用いてその後の予め選択された期間に渡って累算及び合計されるか或いは積分される。しかしながらこの期間の間、遅延要素の組412はPN及び直交符号の適用を1チップ期間だけ遅らせるために使用される。これはサンプル或いは間引き(decimation)のタイミングを変更することと同じ効果を有し、逆拡散及び復号されたデータの“遅い”バージョン(version)を生ずる。逆拡散及び復号されたデータは累算器414において予め選択された期間に渡って累算される。望まれるならば更なる要素や記憶装置を使用することができる。累算された遅いシンボルデータは二乗要素416で二乗される。結果となる早い或いは遅い二乗された値は、互いに引き算されるか、或いは要素418で所望の早い/遅いタイミングの差を生ずるために比較される。この差はタイミングフィルタ420を用いてフィルタにかけられ“前進/遅れ”信号422を与える。時間追跡ループは早い及び遅いシンボルを生ずるために遅延されていない符号及び遅延された符号を用いることの間を交互に繰返し続ける。早い及び遅いシンボルは“前進/遅れ”信号422のための値を更新或いは生成するために使用される。このことは、関連分野の当業者には明らかであるが、受信機が停止させられた或いは新しい信号を捕捉することへシフトさせられた時のように受信機のタイミングがリセットされるまで続く。
【0068】
間引きの過程に対する最初及び進行中のタイミング制御、及び符号の遅延はタイミング制御回路424のような回路によって提供される。即ち、タイミング制御回路424はデシメータ402からのサンプル選択のタイミングを決定する。同時に、PN拡散及び直交符号の生成はまたタイミング制御回路424からの信号によって制御される。この後の方のタイミングはしばしばPN−可能(enable)と呼ばれる。なぜならそれは符号の適用を可能とするからである。また、初期化或いはEPOCHタイミング信号もあってよい。タイミング制御回路424によって選択されたタイミングはタイミングループの出力に応じて“前進/遅れ”信号422によって調整される。一般に、間引きの前に入力信号を集めるために、タイミングはチップ期間の一部となる時間の長さ、例えば8倍オーバーサンプリング(oversampling)が用いられるときは1/8チップだけ進められる。このようなタイミングの使用そして前進及び遅れの機構は当該技術分野でよく知られている。
【0069】
それぞれのフィンガー或いはディジタル受信機が入力信号に同期させる或いは揃えるために調整するタイミングの量は信号の到着時刻の相対的な遅延を決定するために使用される。これはタイミングループ400によって使用される時間変化の総量(前進/遅れ)を追跡することによって容易に達成される。累算器426は予め選択された期間に渡って前進/遅れ信号のそれぞれ或いはコマンドを単に累算及び和をとるために使用することができる。これは入ってくる信号及び受信機のタイミングを揃えるために必要とされる変化の全体或いは正味の量を与える。これはローカルなユーザターミナル或いは受信機のタイミングからの信号のオフセットを表す。ユーザターミナルのタイミングがゲートウェイに比較的近い或いは同期している場合は、これは信号がゲートウェイとユーザターミナルの間を通過するときに信号が経験する遅延の基準を与えることができ、レンジ(range)の計算を可能にする。残念ながら、ローカル振動子の不正確さ或いはドリフトのような多くの要因は一般にそのような直接計算を妨げる。
【0070】
以前述べたように、このデータは他のメッセージの一部として或いは個別の時間情報の信号としてゲートウェイに送信することができる。このデータは後の転送及び使用のために一時的なメモリ要素に保持することができる。また情報は収集の時刻を反映するある形式の“時刻の刻印”と共に提供されるか或いは保持されることが可能で、そのためゲートウェイはデータに対する正確な時間関係を有し、ユーザターミナルの位置をより正確に決定することができる。しかしながら、上述された通信システムで望まれる正確さは非常に厳しい要請ではない。情報が収集から大変短い時間以内に送信されるならば、時刻を刻印することは非常に有用というわけではない。一般に、データはその測定の僅かなデータフレームの間に送られ、そして転送の問題がある場合は、データは僅かなフレーム以上に古くならないように転送前に再び生成される。しかしながら、時刻を刻印することはデータ送信におけるより高い柔軟性、及び実時間を考慮しない信号或いは信号の組の繰り返された転送を可能にする。他方、望まれるレベルの正確さを維持するために時刻を刻印することが用いられない場合、システムは多分固定のタイミングスロットを使用し要求を報告する。
【0071】
その過程は、パイロット信号が検出されずそして直交符号が一般にアクセス探査(probe)信号と関連付けられていることを除くと、ゲートウェイによって受信される信号に対するのに似ている。ゲートウェイにとっての一つの利点はタイミングが絶対時間の基準として考えることができることである。即ち、上述したようにゲートウェイは正確なシステムタイミングを有しており、それ自身の時間に相対的なPN或いは直交符号の適用に対する時間差を正確に決定することができる。このことはゲートウェイに、それぞれの受信機或いはフィンガーに対して使用されているPN符号の状態から正確な通過時間或いは距離を決定することを可能にする。これらの通過時間或いは距離は本発明のレンジパラメータの決定において使用することができる。それゆえ、いくつかの応用では便利であるが、前のようにそれぞれのフィンガーに対する情報は別々に扱うことができ、要素428を用いて結合する必要がない。
【0072】
周波数測定を実行するための一つの実施形態は図5に示されており、それはユーザターミナルに対する周波数追跡ループ500の概略を示す。これらの周波数測定は本発明のレンジレートパラメータの決定において使用することができる。図5において、アナログ受信機からの通信信号は回転器502への入力である。回転器502は、ディジタル受信機或いはフィンガーにおいてアナログ受信機から到着するディジタルのサンプルから残留周波数誤差或いはオフセットを取り除くために予め選択されているが調整可能な位相で動作する。
【0073】
CDMAタイプの信号が使用されるとき、サンプルは、データを得るために一つ或いはそれ以上の符号発生器或いはソース506によって提供される適切なシステムPN拡散符号で結合するために、典型的には乗算器である一つ或いはそれ以上の結合要素504に転送することができる。そのようなPN拡散及び直交符号は単一のステップで別々に或いは一緒に信号と結合することができる。周波数を調整するためにトラヒックチャネルが使用される場合、高速アダマール変換(FHT)要素が結合器504及び符号発生器506の代わりに使用されてよい。この技術は本発明の譲受人に譲渡され、参照としてここに組み込まれる、“直交ウォルシュ変調のための周波数追跡(Frequency Tracking For Orthogonal Walsh Modulation)”と題される米国特許出願番号第08/625,481号において開示される。
【0074】
回転され、逆拡散され、復号された信号はデータシンボルを与えるために累算器514において1シンボル期間に渡って累算され、結果はベクトルクロス積発生要素或いは発生器518に提供される。同時に、各シンボルは、シンボルをクロス積発生器518に転送する前に1シンボル期間の遅延を与える1シンボル時間遅延要素516に供給される。
【0075】
クロス積発生器518はシンボル間の位相の変化を決定するために与えられたシンボルと先行するシンボルとの間のベクトルクロス積を形成する。これは入力信号に加えられた位相回転における誤差の尺度を与える。クロス積発生器518からの出力は回転器502及び符号発生器506へ周波数誤差の推定或いは調整係数として提供される。
【0076】
逆拡散及び復号の過程に対するタイミングコントロールは、上述したようにタイミングコントロール回路524のような回路によって提供される。このタイミングは上述のタイミングループからの出力として提供されてよい。
【0077】
入力信号に揃えるために各フィンガー或いはディジタル受信機がその位相を調整する量は到着する信号における相対的な周波数オフセットを決定するために使用される。即ち、信号が揃うことにおける残留誤差を取り除くために調整されなければならない回転器の位相の量は到着する信号周波数がユーザターミナルに対する期待された或いは局所的な基準の周波数からずれている量を示す。
【0078】
通信システムは通信信号に対して周波数バンドの固定された組の範囲で動作するので、受信機は使用する中心或いは公称キャリア周波数を知っている。しかしながら、ドップラーシフト及び他の効果の結果として、それらは最小であるかもしれないが、到着する信号は期待された中心周波数にはないだろう。上で議論された調整はオフセットを定義し、オフセットはドップラーシフト及び到着する信号の実際の周波数を決定するために使用できる。
【0079】
これは周波数追跡ループ500によって実現される変化の総量を追跡することによって容易に達成される。累算器522は予め選択された期間に渡って、誤差推定からの位相変化、信号、或いはコマンドを単に累算するために使用することができる。これは入ってくる信号及び受信機の周波数を揃えるために必要とされる変化の全体或いは正味の量を与え、ローカルなユーザターミナルからの信号或いは受信機の周波数の適当な周波数バンドに調整された周波数オフセットを表す。
【0080】
前のように、このデータは他のメッセージの一部として或いは個別の周波数情報の信号としてゲートウェイに送信することができる。このデータは後の転送のために一時なメモリに保持することができ、またある形式の“時刻の刻印”と共に提供され得る。しかしながら、データはその測定の僅かなデータフレームの間に送られそして問題がある場合は再生成することができるので、このことは一般には必要がない。他方、望まれるレベルの正確さを維持するために時刻を刻印することが用いられない場合、システムは多分固定のタイミングスロットを使用し要求を報告する。
【0081】
III. 利用可能なパラメータ
好ましい実施形態において、本発明は二つのパラメータ:レンジ及びレンジレート、を用いる。これらのパラメータはユーザターミナル106及び衛星104の間の空間的及び時間的関係を記述する。これらのパラメータ、及びそれらの測定および応用は以下に示される。
【0082】
図6はこれらのパラメータを表す等高線の地表上への投影を描く。パラメータの等高線は同じ値のパラメータを有する全ての点を繋いだ曲線である。図6は衛星104のサブポイント614(すなわち、衛星の直下の地表上の点)と衛星104に関するレンジ及びレンジレートパラメータに対する等高線の地表上への投影を描く。千キロ毎に目盛りがつけられたx軸602A及びy軸602Bの2つの軸は代表的な規模を示すために与えられる。
【0083】
レンジ. レンジパラメータは衛星とユーザターミナルの間の距離を表す。本発明の好ましい実施形態において、レンジパラメータは衛星104およびユーザターミナル106の間の距離Rである。Rの等高線の地表への投影は、図6の604で一般的に示されるように、関係する衛星の下を中心とした円を描く。本発明の好ましい実施形態において、Rは、衛星104からユーザターミナル106へ送信されそして同じ衛星104へ戻る信号の往復遅延(RTD)を測定することによって得られる。そしてRは、片道遅延を生ずるためにRTDを2で割り、その結果を信号の速度を表す光速で乗ずることによって決定される。別の実施形態では、RTDはレンジパラメータとして使用される。
【0084】
本発明の好ましい実施形態において、RTDは以下の方法によって測定される。初めに、既知の使用中のPN系列或いは拡散符号を含んだ信号がゲートウェイ102によって送信される。その信号は衛星104によってユーザターミナル106へ中継される。ユーザターミナル106は信号を直ちに或いは既知の遅延の後に再送する。再送された信号は同じ衛星104によってゲートウェイ102へと中継されて戻される。次にゲートウェイ102は受信された信号のなかのPN系列の状態をローカルなPN系列の状態と比べる。そして状態の違いは、ゲートウェイ102及び衛星104の間の既知の遅延を含む全往復遅延を決定するために使用される。関連する技術でよく知られているように、衛星104及びゲートウェイ102の間の距離はゲートウェイ102によって維持されているのでこれらの遅延は既知である。全往復遅延からこれらの既知の遅延を引き去ることによってRTDを生ずる。既知の衛星の天体位置表を用いて、ゲートウェイ102及び衛星104の間の既知の遅延は当該技術分野で良く知られたさまざまな方法で計算される。
【0085】
当業者にとって明らかなように、本発明の精神と範囲から逸脱することなくRを得るために他の方法も使用することができる。
【0086】
本発明の好ましい実施形態において、通話中あるいは呼設定中に往復遅延を測定することができる。呼設定中に測定を行う場合には、通常、測定された信号がページング信号の一部として、ゲートウェイ102からユーザターミナル106へ送信され、さらに、アクセス信号の一部としてユーザターミナル106からゲートウェイ102へ再送信される。通話中に測定を行う場合には、通常、測定された信号がゲートウェイ102からユーザターミナル106へと送信され、さらにトラフィック信号の一部として戻る。当業者にとって明らかであるように、所望であれば、本発明の精神および範囲を逸脱しない限り、測定された信号は別タイプの信号であってもよく、あるいは別の信号に組込まれていてもよい。
【0087】
レンジレート. レンジレートパラメータは、ユーザターミナル106と衛星104との間の相対的な半径方向速度を表すものである。本発明の好ましい実施形態において、レンジレートパラメータは、ユーザターミナル106と衛星104との間の相対的な半径方向速度
【数1】

【0088】
である。本発明の別の実施形態において、レンジレートパラメータは、ユーザターミナル106と衛星104との間で送信される信号内のドップラーシフトRTDopである。
【数2】
【0089】
は、RTDopに光の速度を掛け、中心キャリヤ周波数で割ることにより求めることができる。地球の表面上へのRTDopの等高線の投影は、概して第6図の606に示すように、関連する衛星の速度ベクトル616に対して対称的な、双曲線状の曲線の組を表す。衛星104のサブポイント614を通過するRTDop=0の等高線は直線を示す。
【0090】
本発明の好ましい実施形態において、
【数3】
【0091】
は、以下に示す方法によって、1つはユーザターミナル106、もう1つはゲートウェイ102における2つの周波数測定を行うことにより決定される。ユーザターミナル106は、衛星104を介してゲートウェイ102から受信した信号の周波数を測定し、この周波数をゲートウェイ102に報告する。ゲートウェイ102は、同じ衛星104を介してユーザターミナル106から受信した信号の周波数を測定する。従って、ゲートウェイ102において2つの周波数を測定することが可能である。好ましい実施形態では、周波数は局部発振器周波数に関連して測定される。次に、以下に示すように実周波数が得られる。この技術は、本明細書中で参照として組み込まれる、出願番号(指定されることになっている、代理人名簿番号PA300)を持つ、同時継続の、また一般所有の同時継続出願である”通信システムにおける周波数オフセットの決定(Determination Of Frequency Offsets In Communication Systems)”にも開示されている。
【0092】
これらの測定は、2つの未知数、すなわち、相対的な半径方向速度
【数4】
【0093】
と、ユーザターミナル106の局部発振器の正規化オフセットfoff/f0を含む2つの方程式によって表すことができる。この方程式の対は、これら2つの未知数に対して解くことができ、
【数5】
【0094】
を与えるだけでなく、関連技術における当業者にとって明白であるように、衛星通信システムのオペレーションの他の局面において有用な測定であるfoff/f0をも与える。
【0095】
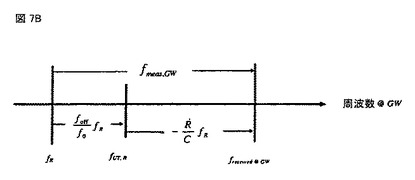
これら2つの方程式の誘導は、図7A、図7Bのように図によって描写できる。図7Aは、ユーザターミナル106において測定された周波数の構成要素を図示したものである。図7Bは、ゲートウェイ102において測定された周波数の構成要素を図示したものである。
【数6】
【0096】
= 衛星104とユーザーターミナル106との間の相対半径速度
C=伝搬速度(光の速度)
fF=順リンク公称周波数
fR=逆リンク公称周波数
f0=ユーザターミナル106の局部発振器の公称周波数
foff=ユーザターミナル106の局部発振器の周波数オフセット
foff/f0=ユーザターミナル106の局部発振器の正規化周波数オフセット
図7Aを参照すると、ユーザターミナル106で測定された周波数は以下で与えられる:
【数7】
【0097】
図7Bを参照すると、ゲートウェイ102で測定された周波数は以下で与えられる:
【数8】
【0098】
(1)と(2)を足し引きすることにより、以下の関係に従って、周波数オフセットと相対的な半径方向速度の両方が与えられる:
【数9】
【0099】
関連技術における当業者にとって明らかであるように、本発明の精神および範囲を逸脱せずに、別の方法を利用して
【数10】
【0100】
を求めることもできる。
【0101】
本発明の好ましい実施形態において、通話中、または呼設定中に周波数の測定を行うことができる。呼設定中に周波数の測定を行う場合は、ユーザターミナル106で測定された信号はページング信号であり、ゲートウェイ102で測定された信号はアクセス信号である。通話中に周波数の測定を行う場合は、ユーザターミナル106およびゲートウェイ102で測定された信号はトラフィック信号である。関連技術における当業者に明らかであるように、本発明の精神および範囲を逸脱しない限り、別の信号を利用することも可能である。
【0102】
IV. 位置決め方法
上述した2つのパラメータを、ユーザターミナル106の位置を決定するために使用することができる。本発明を理解するための補助として、パラメータの物理的な表示を、地球の表面上に投影されたパラメータの等高線として示している。
【0103】
本発明の好ましい実施形態において、位置決めはレンジおよびレンジレートパラメータに基づいている。図6において、レンジパラメータはRであり、レンジレートパラメータはRTDopである。図6によれば、ユーザターミナル106と衛星104との問の2000kmの範囲を示す円を形成する1つのRの等高線が描写されており、これを概して604で示している。
【0104】
図6はまた、RTDopの等高線の族を、概して606で示して描写している。RTDopの等高線は双曲線状であり、衛星104の速度ベクトル616に対して対称的である。RTDopの等高線の各々は、衛星104に関して同じドップラーシフトを経験する地球の表面上のこれらの点を接続する。RTDopの等高線はkHzで目盛られ、RTDop=0の等高線は衛星104のサブポイント614を通過する。
【0105】
この位置決め方法には問題が2つある。1つは位置の不明確さである。例えば、R=2000kmで、RTDop=+30kHzの場合を考える。図6を参照すると、R=2000kmの等高線は、610A、610Bの2点においてRTDop=+30kHzの等高線と交差する。さらに情報を得なければ、ユーザターミナル106が点610Aにあるか、あるいは610Bにあるかを決定することはできない。従って、この解決は不明確である。
【0106】
2つ目の問題は、精度の幾何学的な希薄化(Geometric Dilution of Precision)(GDOP)として知られている。GDOP特異性は、測定における小さな誤差が位置解決における大きな誤差を引起す際に生じる。図6のポイント610Cに示すように、レンジおよびレンジレートの等高線が接しているかまたはほぼ接している場合、どちらのパラメータの小さな誤差も大きな位置誤差を生じてしまう。さらに位置情報を得なければ、レンジおよびレンジレートパラメータのみを使用する位置決め方法はGDOP特異性の問題を抱える。
【0107】
これらの問題は少なくとも2つの方法で解決できる。第1の方法は情報を追加することであり、これにより位置の不明確とGDOP特異性の両方を解決できる。この情報は、追加の測定を行うことにより、あるいは、どの衛星のビームが使用されているかといった他のパラメータの使用により得ることができる。このような技術の1つは、出願番号(指定されることになっている、代理人名簿番号PD456)を持つ、同時継続の、また一般所有の同時継続出願である、”衛星ビームを用いた不明確な位置解決に対する不明確な解像度(Ambiguity Resolution For Ambiguous Position SolutionsUsing Satellite Beams)”に開示されている。第2の方法は、最後の公知位置のような、ユーザターミナル106の位置の適切な推測から開始することである。
【0108】
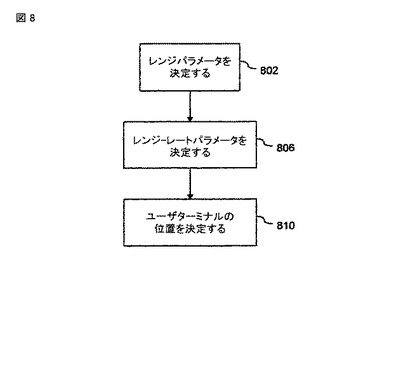
図8は、本発明の好ましい実施形態の動作を示すフローチャートである。上述したように、また工程802に示すように、1つ以上のレンジパラメータが決定される。上述したように、また工程806に示すように、1つ以上のレンジレートパラメータが決定される。次に、工程810に示され、以下に説明するように、衛星の既知の位置および速度と、レンジおよびレンジレートパラメータとに基づいて、地球の表面上のユーザターミナルの位置が決定される。
【0109】
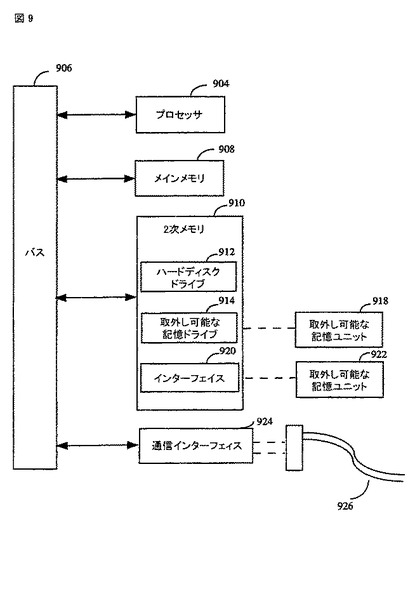
V. 位置決め実行
位置決め実行について詳細に述べる前に、まず、本発明の位置決め方法が動作できる例証的環境を説明することが有用である。図9は、このような例証的環境を示すブロック図である。この環境は、制御プロセッサ220および/または制御プロセッサ320の一部を形成することができるコンピュータシステム900である。コンピュータシステム900は、プロセッサ904といった1つ以上のプロセッサを備えている。プロセッサ904は通信バス906に接続している。この例証的コンピュータシステムに関して様々な実施形態が説明されている。この説明を読んだ後に、関連技術における当業者には、他のコンピュータシステム、コンピュータアーキテクチャ、ハードウェア状態マシン、ルックアップテーブル等、およびこれらの様々な組合せを使用して、本発明の位置決め方法をどのように実行するかが明らかになるであろう。
【0110】
コンピュータシステム900はまた、好ましくはランダムアクセスメモリ(RAM)であるメインメモリ908を備え、またさらに、2次メモリ910を備えることもできる。2次メモリ910は、例えば、ハードディスクドライブ912および/またはフロッピー(登録商標)ディスクドライブ、磁気テープドライブ、光ディスクドライブ等の取外し可能な記憶ドライブ914を備えることができる。取外し可能な記憶ドライブ914は、公知の方法によって、取外し可能な記憶ユニット918からの読取り、および/または取外し可能な記憶ユニット918への書込みを行う。取外し可能な記憶ユニット918にはフロッピー(登録商標)ディスク、磁気テープ、光ディスク等がある。理解されるように、取外し可能な記憶ユニット918は、コンピュータソフトウェアおよび/またはデータを記憶したコンピュータが使用可能な記憶媒体を備えている。
【0111】
別の実施形態において、2次メモリ910は、コンピュータプログラムあるいは他の指示をコンピュータシステム900内にロードさせるための他の類似する手段を備えていてもよい。このような手段には、例えば、取外し可能な記憶ユニット922、インターフェース920がある。これらは、プログラムカートリッジ、カートリッジインターフェース(ビデオゲーム装置に内臓されているようなもの)、取外し可能なメモリチップ(EPROMまたはPROM)および関連するソケット、また、取外し可能な記憶ユニット922からコンピュータシステム900へソフトウエアやデータを転送するその他の取外し可能な記憶ユニット922およびインターフェース920を含む。
【0112】
コンピュータシステム900はさらに、通信インターフェース924を備えることができる。通信インターフェース924によって、コンピュータシステム900と外部装置との間で、通信パス926を介してソフトウェアやデータを転送することができる。通信インターフェース924には、例えば、モデム、ネットワークインターフェース(例えばイーサネット(登録商標)カード)、通信ポート等がある。
【0113】
通信インターフェース924を介して転送されるソフトウェアおよびデータは、電子、電磁波、光学の信号形式、または通信パス926を介して通信インターフェース924による受信が可能な他の信号といった信号形式であってよい。
【0114】
本発明の位置決め方法の動作は、例証的環境に関連して説明している。その理由は便宜性のみを目的としたものである。本発明の位置決め方法の動作はこの例証的環境での使用に限定されるものではない。事実、以下の説明を読めば、関連技術における当業者には本発明の位置決め方法を別の環境で実行する方法がわかるであろう。
【0115】
本発明のある実施形態において、コンピュータシステム900に関して下記に示した位置決め方法を実施することにより、ユーザターミナル106の位置が決まる。当業者にとって明白である様に、この位置決め方法は、今回の発明の意図に沿った範囲内で、ハードウェア状態機械またはルックアップテーブル(look−up tables)などによって実施できる。
【0116】
本発明の好ましい実施形態において、位置決めに使用するMパラメータから成るzで示したパラメータのM×1ベクトルが構成される。ベクトルzは、上記で説明した各々のパラメータの1個または複数を含むことができる。当該技術において公知の様に、このパラメータは、ユーザターミナルの位置の2次元べクトルx、即ち
(5) x=[lat long]T
ここでTはマトリクスまたはベクトルの転置を示すのであるが、このxの下式に従った非線形関数である:
(6) z=h(x)+v
ここで、M×1ベクトルvは測定誤差を表し、hは非線形関数を表し、実測パラメータおよびユーザターミナル106位置との間の関係を示す。またhは、衛星104Aおよび104Bの位置および速度の関数でもある。別の実施形態において、(7)式に示す様に、ユーザターミナル位置ベクトルxは、緯度および経度の代わりに、3個のデカルト座標で定義できる。
【0117】
(7) x=[xyz]T
ガウスの線形化手法に従って、ユーザターミナル106の位置を決定するためにM×Kの偏導関数マトリクスHを構成する。ここで、Kは未知の位置の数であり、Hの(m,k)成分は、k番目の位置パラメータに関するm番目の測定の偏導関数であり、所与の位置xで決まる。例えば、式(5)の様に、位置ベクトルが経度および緯度を表示する場合、Kは2に等しく、マトリクスHのk=1の列の成分はユーザターミナル106の緯度に関する偏導関数を示し、またk=2の列の成分はユーザターミナル106の経度に関する偏導関数を示す。位置ベクトルをデカルト座標(K=3)で表した場合、Hのk=(1,2,3)の列はそれそれ(x,y,z)座標を示す。デカルト座標系を使用する場合、式を1つ追加して、各座標を2乗した値の合計が、地球半径の2乗に等しいことを表示する。xおよびHの関係は下式で与えられる。
【数11】
【0118】
反復荷重最小二乗法を使用して、未知の位置パラメータを決定する。本発明の好ましい実施形態において、使用する方法は、H.W.ソレンソンが「パラメータ評価の原理および課題」ニューヨーク、マーセルデッカー1980で発表した荷重ガウス・ニュートン手法である。反復式は下記の関係で表される。
【数12】
【0119】
ここで、
【数13】
【0120】
はそれぞれ「現在の」、及び「次の」位置の推定であり、WはM×Mの荷重マトリクスである。下付き添字iは反復回数を表し、i=0が最初の反復を表す。推定位置に基づくマトリクスまたはベクトルには、上付き添字「^」を付けて表す。ユーザターミナル106の最後に知られている位置のようなの基準点を、最初の推定位置として選択する。最新位置が未知の場合、ゲートウェイ102の位置等の任意の位置を使用して構わない。
【数14】
【0121】
は、現在位置の推定値で決定される偏導関数マトリクスであり、また
【数15】
【0122】
は、予想される誤差の影響を受けないパラメータであり、現在の位置推定を使用して決定される。この反復は
【数16】
【0123】
の間の差分が所定の閾値を下回る場合に終了する。
【0124】
関連技術における当業者にとっては自明であるが、この閾値は、システムの精度に基づいてシステムの設計者および/またはオペレータによって決定される。例えば、この閾値は測定のチップ精度およびチップ速度に基づいていてよい。
【0125】
未知数よりもパラメータ数の方が多い場合、M×Mの荷重マトリクスWの成分は、推定位置x^に於ける特定のパラメータの影響を強調する手段を提供する。好ましい実施形態において、荷重マトリクスWは対角マトリクスとなり、その成分は、それぞれのパラメータを決定する相対的な精度を反映する。この様に、関連技術の当業者にとって明白である通り、成分の値は、システムの既知の測定精度に基づき設定される。従って、非常に高精度の測定に基づいたパラメータは、正確に測定できないパラメータよりも高い重要性が与えられる。荷重マトリクスの成分は予め定められた値へと初期化されるが、動的に調整することが可能である。測定誤差の共分散マトリクスの逆マトリクスとして荷重マトリクスが選択されると、最適な精度が得られる。
【0126】
測定誤差が、相互に独立で、平均がゼロで分散が以下であるならば:
【数17】
【0127】
Wはσ2mを対角要素とする対角マトリクスである。
【0128】
この様にWを選択すると、推定された位置ベクトルxのk番目の成分の分散は下記で与えられる:
【数18】
【0129】
最後に、距離の単位での結合された理論的な水平方向の位置の誤差は下記で与えられる:
【数19】
【0130】
ここで、REは地球の半径である。
【0131】
好ましい実施形態において、位置決め方法は、地球表面に対して滑らかな楕円体モデルを使用する。別の実施形態において、位置決め方法は、WGS−84地球モデルの様な地球表面に対して滑らかな楕円体モデルを最初に使用する。x^iおよびx^i+1の間の差が所定の閾値未満となるようにxの値が収束したときに、詳細なデジタル地形モデルに滑らかなモデルが取り替えられ、そして、x^iおよびx^i+1の間の差が第2の所定の距離閾値未満になるようにxの値が収束するまで反復は継続される。この様にして、ユーザターミナル106の高度上昇に伴うあらゆる誤差を軽減する。別の実施形態においては、所定の回数の反復の後に、詳細なデジタル地形モデルに取り替えられる。上記で説明した距離閾値および反復の回数は、当業者にとって自明であるように、様々な要因に従って決定される。
【0132】
VI.結論
本発明の様々な実施形態を上記に説明したが、上記は例を記したものであり、これに限定されない。当業者にとって自明である通り、本発明の精神と範囲から逸脱することなく、様々な形態や細部の変更がなされてよい。従って、本発明は、上記で説明した実施形態に制限されず、下記の請求の範囲および関連請求に従ってのみ定義される。
【技術分野】
【0001】
本発明は、一般に、衛星を利用した物体の位置決定に関する。より具体的には、本発明は、衛星通信システム内のユーザターミナルの位置を、その通信信号の特性を利用して決定するための方法に関する。
【背景技術】
【0002】
衛星に基く代表的な通信システムは、少なくとも一つの地上基地局(以下、ゲートウェイという)と、少なくとも一つのユーザターミナル(例えば、移動電話)、及び、ゲートウェイとユーザターミナルとの間の通信信号を中継する少なくとも一機の衛星を含んでいる。このゲートウェイは、一つのユーザターミナルから別のユーザターミナルへのリンク、又は、地上電話システムのような通信システムを提供する。
【0003】
多数のシステム利用者の間で情報を転送するために、様々な多元接続通信システムが開発されている。これらの手法には、時分割多元接続(TDMA)、周波数分割多元接続(FDMA)、及び、符号分割多元接続(CDMA)のスペクトル拡散手法があり、それらの基礎はこの分野でよく知られている。CDMA手法の多元接続通信システムへの利用は、「衛星又は地上中継機を利用したスペクトル拡散多元接続通信システム」と題する、1990年2月13日に発行された米国特許第4,901,307号、並びに、「個々の受容体の位相時間とエネルギーを追跡するための、スペクトル拡散通信システムにおいて全スペクトルで照射されたパワーを用いる方法及び装置」と題する、1995年1月4日に出願された米国特許出願番号第08/368,570号に開示されている。これらはいずれも本発明の譲受人に譲渡されたもので、参照によりここに組込まれたこととする。
【0004】
上記の特許文献は、多元接続通信システムを開示しているが、このシステムで、多数の一般に移動式又はリモート式システムの利用者が、ユーザターミナルを採用して他のシステム利用者又は公共電話交換ネットワークのような他の接続されたシステムの利用者との間で通信を行なっている。このユーザターミナルでは、CDMAスペクトル拡散型の通信信号を使って、ゲートウェイ及び衛星を介して通信を行なう。
【0005】
通信衛星は、衛星通信信号を地球表面に投影することによって作られる「スポット」を照射するためのビームを形成している。衛星の代表的なスポット用ビーム・パターンは、所定の通信範囲のパターン中に配置された多数のビームを含んでいる。一般に、各ビームは共通の地域をカバーし、それぞれ異なる周波数帯域を占める多数のいわゆるサブビーム(以下CDMAチャネルという)を備えている。
【0006】
代表的なスペクトル拡散通信システムにおいては、通信信号としての送信用の搬送信号への変調に先立って、一組の予め選択された擬似無作為雑音(PN)コード・シーケンスを使って、情報信号を所定のスペクトル帯域に亘って変調する(即ち「拡散する」)。スペクトル拡散送信の方法としてこの分野でよく知られているPN拡散は、データ信号の帯域よりはるかに広い帯域を有する送信用の信号を生成する。前進通信リンク(即ち、ゲートウェイに始まりユーザターミナルで終わる一つの通信リンク)においては、PN拡散符号、又はバイナリー・シーケンスが、ゲートウェイによって異なるビームで送信された信号を区別するために、また、マルチパス信号を区別するために使われる。これらのPN符号は、一般に一定のサブビーム内の全ての通信信号に共用される。
【0007】
代表的なCDMAスペクトル拡散システムにおいては、チャネル化(channelizing)符号が、特定のユーザターミナル用を意図して、前進リンクの衛星ビームの中で送信された信号を区別するために使われる。即ち、一意的な「チャネル化」直交符号を用いることにより、前進リンク上のユーザターミナルの各々に一意的な直交チャネルが提供される。ウォルシュ関数系が、通常、地上のシステムでは64コード・チップ、衛星システムでは128コード・チップ程度の長さのチャネル化符号を与えるのに一般に用いられる。
【0008】
米国特許第4,901,307号に開示されたような代表的なCDMAスペクトル拡散システムは、前進リンクのユーザターミナル通信について、コヒーレントな変調及び復調の使用を想定している。この方法を用いる通信システムでは、前進リンク用のコヒーレントな位相の参照として、「パイロット」搬送信号(以下「パイロット信号」という)が使われる。即ち、一般にデータ変調を含まないパイロット信号は、ゲートウェイによって、通信範囲の全領域に亘って送信される。一般に、使われるビームの各々について、また、使われる周波数の各々について、それぞれのゲートウェイによってただ一つのパイロット信号が発せられる。これらのパイロット信号は、そのゲートウェイから信号を受信する全てのユーザターミナルに共用される。
【0009】
パイロット信号を用いて、ユーザターミナルは、初期のシステム同期、時刻、周波数、並びに、ゲートウェイから送信された他の信号の位相の追跡を得る。パイロット信号の搬送波の追跡から得られる位相情報は、他のシステムの信号、或いはトラフィック(traffic)信号のコヒーレントな復調のための搬送波位相の参照として用いられる。この手法により、多くのトラフィック信号が位相参照として共通のパイロット信号を共用することが可能になり、追跡機構はより低コストに、また、より効率的になる。
【0010】
ユーザターミナルが通信セッションに参加していない場合(即ち、ユーザターミナルがトラフィック信号を受信も送信もしていない)、ゲートウェイは、情報をページング信号として知られる信号を使って、特定のユーザターミナルに移動させることができる。例えば、特定の移動電話に宛てられた呼び出しがある場合は、ゲートウェイはページング信号を使って移動電話に警告する。ページング信号は、また、トラフィックチャネルの割振り、接続チャネルの割振り、及びシステムオーバーヘッド(overhead)情報を配分するためにも使われる。
【0011】
ユーザターミナルは、接続信号や接続プローブを逆進リンク(即ち、ユーザターミナルに始まりゲートウェイで終わる通信リンク)を用いて送ることにより、ページング信号に応答することができる。この接続信号は、ユーザターミナルが呼を始める時にも使われる。
【0012】
ユーザターミナルとの通信が求められた場合、通信システムは、そのユーザターミナルの位置を決定する必要があるかもしれない。ユーザターミナルの位置情報を必要とするのには、いくつかの動機がある。一つの動機は、システムが通信リンクを提供するには、適切なゲートウェイを選択しなければならない。この動機の一つの側面は、通信リンクの適切なサービス・プロバイダ(例えば、電話会社)への割振りである。一般にサービス・プロバイダは特定の地域に割振られており、その地域内の利用者との全ての通話を扱っている。特定のユーザターミナルとの通信が求められた場合、通信システムは、その利用者が位置する地域に基いてサービス・プロバイダへ呼を割振ることができる。適切な地域を決めるためには、通信システムはユーザターミナルの位置を必要とするのである。同様な動機が、呼が政治的な境界や契約によるサービスに基いてサービス・プロバイダに割振らなければならない場合にも生ずる。
【0013】
衛星利用の通信システムについての位置判定における重要な要求項目は速度である。通信が特定のユーザターミナルで要求される場合、ユーザターミナルに役立つゲートウエイは迅速に選択される必要がある。例えば移動電話ユーザは、呼び出しの際に数秒以上の遅延に耐えられないと思われる。この状態における位置精度の必要性は、速度の必要性よりは重要ではない。10キロメートル(km)未満のエラーが適切とみなされる。対照的に衛星利用位置判定の大部分の従来の方法は、速度よりも精度を強調している。
【0014】
1つの従来の方法は、米国海軍TRANSITシステムが採用しているものである。そのシステムにおいてユーザターミナルは、低軌道(LEO)衛星による信号送信の連続ドップラー測定を実施する。この測定は数分間継続する。このシステムは通常、衛星の2回の通過を必要となるので、100分以上待たなければならない。加えて位置計算がユーザターミナルで実施されるので、衛星はその位置に関する情報(「天体位置表」として知られる)を送信しなければならない。
【0015】
TRANSITシステムは高精度(1メートルの程度)が可能であるが、当該遅延は、商業衛星通信システムにおける使用では受入れできない。
【0016】
他の従来の方法は、ARGOSおよびSARSAT(探査および救助衛星)システムが採用しているものである。その方法においてユーザターミナルは、衛星上の受信装置へ間欠ビーコン信号を送信し、その受信装置が信号の周波数測定をする。衛星は、ユーザターミナルから4つを超えるビーコン信号を受信するならば、ユーザターミナルの位置を通常判定できる。ビーコン信号が間欠であるので、TRANSITシステムによる実施されるもののような広範なドップラー測定は利用できない。
【0017】
他の従来の方法は、全地球位置把握システム(GPS)が採用しているものである。その方法において各衛星は、衛星の天体位置表を含む刻時信号を送信する。ユーザターミナルは、GPS信号を受信すると、それ自体のクロックに関しての送信遅延を測定し、送信している衛星の位置の疑似範囲を決定する。GPSシステムは、二次元位置測定の場合に3個の衛星、および三次元位置測定の場合に第4の衛星を必要とする。
【0018】
GPS方法の1つの欠点は、位置判定に少なくとも3個の衛星を必要とすることである。GPS方法の他の欠点は、計算がユーザターミナルで実施されるので、GPS衛星は、その天体位置表情報を送信しなければならないし、またユーザターミナルは、所要の計算を実施するために計算資源を保有しなければならないということである。
【0019】
全ての上述の方法の1つの欠点は、ユーザターミナルが、これらの方法を使用するために、通信信号を処理するために必要な送信装置または受信装置に加えて、送信装置または受信装置を別途有しなければならないということである。
【0020】
他の従来の方法は、参照としてここに組み込まれる、「二重衛星ナビゲーションシステムと方法」という名称で、1992年6月30日に付与された共通所有される米国特許第5,126,748号に開示されているものである。この方法は、2個の衛星を使用して、三角測量術を通してユーザターミナルの位置を有効に求める。この方法は有用であるが、2個の衛星を必要とする。
【0021】
したがって必要かつ望ましいものは、1個だけの衛星を使用して迅速な位置判定ができる衛星利用位置判定システムである。
【発明の概要】
【0022】
本発明は、低軌道衛星通信システムのような衛星通信システムにおいて1個だけの衛星を使用してユーザターミナル(例えば移動電話)の位置を迅速に求めるシステムと方法である。そのシステムには、ユーザターミナル、既知の位置と既知の速度を有する少なくとも1個の衛星、および衛星を通してユーザターミナルと通信するゲートウエイ(すなわち地上基地局)が含まれる。その方法には、ユーザターミナルと衛星との間の時間的および空間的関係を示すパラメータを決定する工程、ならびにそのパラメータおよび衛星の既知の位置と既知の速度を使用してユーザターミナルの位置を求める工程が含まれる。
【0023】
レンジとレンジレートの2つのパラメータが使用される。レンジパラメータは、衛星とユーザターミナルとの間の距離を示す。レンジレートパラメータは、ユーザターミナルと衛星との間の相対的な(relative)半径方向速度(radial velocity)を示す。
【0024】
本発明の好ましい実施形態において、繰返しの重みつけガウス−ニュートン最小二乗法が使用されて、使用されるパラメータおよび衛星の既知の位置と既知の速度に基づいてユーザターミナルの位置を求めるのに使用される。
【0025】
本発明の1つの利点は、低軌道衛星のような単一の衛星を使用して迅速に位置を求めることができることである。
【図面の簡単な説明】
【0026】
【図1】標準的な衛星通信システムを示す。
【図2】ユーザターミナルに使用される代表的なトランシーバのブロック図である。
【図3】ゲートウエイに使用される代表的な送信装置と受信装置のブロック図である。
【図4】ユーザターミナルに使用される代表的な時間追跡ループのブロック図である。
【図5】ユーザターミナルに使用される代表的な周波数追跡ループのブロック図である。
【図6】衛星のサブポイントと衛星に関するレンジ及びレンジレートパラメータに対する等高線の地表上への投影を示す。
【図7A】ユーザターミナルにおいて測定された信号の周波数の成分の線図である。
【図7B】ゲートウエイにおいて測定された信号の周波数の成分の線図である。
【図8】本発明の好ましい実施例の作動を示すフローチャートである。
【図9】本発明が作動できる代表的な環境を図示するブロック図である。
【発明を実施するための形態】
【0027】
本発明の特徴と利点は、図面と連係してなされる以下の詳細な説明から一層明らかになる。図面における同様な参照数字は同一または機能的に同様な構成部材を示す。加えて参照数字の最も左の桁は、その参照数字が最初に現れる図面を明示する。
【0028】
I.緒言
本発明は、1個だけの低軌道(LEO)衛星を使用して衛星通信システムにおいてユーザターミナルの位置を迅速に求めるシステムと方法である。当業者に分かるように本発明の構想は、衛星とユーザターミナルとの間の相対移動が以下に述べるレンジレート測定を容易にするのに十分であるならば、衛星が非低軌道を走行する衛星システムへ適用できる。
【0029】
本発明の好ましい実施形態は、以下に詳細に説明される。特定の工程、構成および配置が説明されるが、これは単なる説明上のものであることが分かる。当業者は、本発明の精神と範囲から逸脱することなく他の工程、構成および配置を使用できることが分かる。
【0030】
本発明は、4つの部分で説明される。第1に標準的な衛星通信システムが説明される。第2にシステムの位置判定方法に使用されるパラメータが説明される。第3に位置判定方法が物理的な表示で説明される。最後に位置判定方法の実施が説明される。
【0031】
II.標準的な衛星通信システム
図1は、標準的な衛星通信システム100を示す。衛星通信システム100は、ゲートウエイ102、衛星104、およびユーザターミナル106から成る。ユーザターミナル106は一般に、恒久的な建築物に一般に取り付けられる固定されるユーザターミナル106A、車両に一般に取り付けられる移動ユーザターミナル106B、および一般に手持ち式である可搬式ユーザターミナル106Cの3つの形式のものである。ゲートウエイ102は衛星104を通してユーザターミナル106と通信する。
【0032】
ユーザターミナル106に使用される代表的なトランシーバ200は、図2に図示される。トランシーバ200は、アナログ受信機214へ送信される通信信号を受信する少なくとも1つのアンテナ210を使用し、その受信機において信号がダウンコンバートされ、増幅およびデジタル化される。デゥプレクサエレメント212は、同一のアンテナが送信と受信機能に役立つように通常使用される。しかしながら一部のシステムは、異なる周波数で作動するために別個のアンテナを使用する。
【0033】
アナログ受信機214により出力されるデジタル通信信号は、少なくとも1つのデジタルデータ受信機216Aおよび少なくとも1つのデジタルサーチャー受信機218へ送信される。追加のデジタルデータ受信機216B−216Nは、当業者に分かるように、ユニットの複雑性の受入れレベルに応じて、信号ダイバーシチの所要のレベルを得るために「レイク(Rake)」構成で使用できる。そのように構成される受信装置は、「レイク受信装置」と呼ばれ、また各デジタルデータ受信機216は「フィンガー」と呼ばれる。レイク受信装置のフィンガーは、信号ダイバーシチに使用されるばかりでなく、複数の衛星からの信号を受信するのにも使用される。さらに追加のサーチャー受信機218は、高速信号取得に使用できる。
【0034】
少なくとも1つのユーザターミナル制御プロセッサ220は、デジタルデータ受信機216B−216Nおよびサーチャー受信機218へ電気的に連結される。制御プロセッサ220は、他の機能の中で、基本の信号の処理、タイミング、電力とハンドオフ制御、または信号キャリアに使用される周波数の調整と選択を提供する。制御プロセッサ220により頻繁に実施される他の基本制御機能は、通信信号波形を処理するのに使用されるPNコードシーケンスまたは直交関数の選択と操作である。制御プロセッサ220信号処理は、本発明により使用されるパラメータの決定を含むことができる。相対的タイミングおよび周波数のような信号パラメータの計算は、測定の効率と速度を向上し、かつ制御処理資源の割当を改善するために追加または別個の専用回路の使用を含むことができる。
【0035】
デジタルデータ受信機216A−216N用の出力部は、ユーザターミナル内のユーザデジタルベースバンド回路222へ電気的に連結される。ユーザデジタルベースバンド回路222は、ユーザターミナルユーザとの間で情報の送信に使用される処理エレメントと表示エレメントを含む。すなわち一時または長期デジタルメモリのような信号またはデータ格納エレメント、表示画面、スピーカ、キーパッドターミナルおよびハンドセットのような入力と出力デバイス、A/Dエレメント、ボコーダおよび他の音声とアナログ信号処理エレメントなどであり、全ては、技術上既知のエレメントを使用するユーザベースバンド回路の構成部分を形成する。ダイバーシチ信号処理が採用されるならば、ユーザデジタルベースバンド回路222は、ダイバーシチコンビナーとデコーダーを含むことができる。これらのエレメントの一部は、制御プロセッサ220の制御の下で、またはそれと通信して作動できる。
【0036】
音声または他のデータが、出力メッセージまたはユーザターミナルで生じる通信信号として生成されるとき、ユーザデジタルベースバンド回路222は、所要のデータを送信するために、受信、格納、処理または生成するのに使用される。
【0037】
ユーザデジタルベースバンド回路222は、このデータを制御プロセッサ220の制御の下で作動する送信変調器226へ送信する。送信変調器226の出力は、電力コントローラ228へ送信され、その電力コントローラは、出力信号をアンテナ210からゲートウエイへ最終的に送信するために送信電力増幅器230へ出力電力制御を供給する。
【0038】
トランシーバ200は、1つあるいはそれ以上の事前補正要素あるいは事前補正器232及び234も使用できる。これらの事前補正器の動作は、参照してここに組み込まれている出願第 号(譲渡される、弁理士ドケット番号PA338)を有する名称が「非対地静止衛星システムのための時間および周波数事前補正(Time And Frequency Precorrection For Non-Geostationary Satellite Systems)」の同時係属の共通所有出願に開示されている。好ましくは、事前補正は、ベースバンド周波数のデジタル電力コントローラ228の出力に生じる。周波数調整を含むベースバンドスペクトル情報は、送信電力増幅器230で実行されるアップ変換中適切な中心周波数に変換される。事前補正あるいは周波数調整は、当該技術分野で周知の技術を使用して行われる。例えば、事前補正は、信号をejωtの数と乗算するのに等しい複素信号回転によって行うことができる。ここでωは既知の衛星の天体位置表および所望のチャネル周波数に基づいて計算される。これは、通信信号が同相(I)チャネルおよび直角位相(Q)チャネルとして処理される場合に非常に有用である。直接デジタル合成装置は、回転積のいくつかを生成するために使用できる。それとは別に、2進シフト加算および減算を使用し、一連の別個の回転を実行し、所望の全回転を生じる座標回転デジタル計算要素が使用できる。このような技術および関連ハードウェアは当該技術分野で十分理解される。
【0039】
代替例として、事前補正要素234は、送信電力増幅器230の出力の送信路に配置し、出力信号の周波数を調整できる。これは、送信波形のアップ変換あるいはダウン変換のような周知の技術を使用して行われる。しかしながら、アナログ送信機の出力の周波数を変えることは、波形を整形するためにしばしば一連のフィルタがあるためにより困難であり得る、この時点の変化はフイルタリング処理を干渉し得る。それとは別に、事前補正要素234は、ユーザターミナルのアナログアップ変換・変調段(230)のための周波数選択あるいは制御機構の一部を形成できるので、適切に調整された周波数は、デジタル信号を所望の送信周波数に1ステップで変換するために使用される。
【0040】
受信通信信号、あるいは1つあるいはそれ以上の共有資源信号のための1つあるいはそれ以上の測定信号パラメータに対応する情報あるいはデータは、当該技術分野で公知のいろいろな技術を使用してゲートウェイに送信できる。例えば、情報は、別個の情報信号として転送できるしあるいはユーザデジタルベースバンド回路222によって作成された他のメッセージに付加できる。それとは別に、この情報は、制御プロセッサ220の制御の下で送信変調器226あるいは送信電力コントローラ228によって所定の制御ビットとして挿入できる。
【0041】
デジタルデータ受信機216A−Nおよびサーチャー受信機218は、特定の信号を復調および追跡するために信号相関要素で構成されている。サーチャー受信機218は、パイロット信号、あるいは他の比較的固定パターンの強い信号を探索するために使用されるのに対して、データ受信機216A−Nは、パイロット信号を追跡するあるいは検出パイロット信号に関連した信号を復調するために使用される。したがって、これらの装置の出力は、本発明のパラメータを計算するために使用される情報を提供するように監視できる。受信通信信号あるいは共有資源信号でユーザターミナル106によって行われる測定の情報は、当該技術分野で公知のいろいろな技術を使用してゲートウェイに送信できる。例えば、情報は、別個のデータ信号として転送できるしあるいはユーザデジタルベースバンド回路222によって作成された他のメッセージに付加できる。テータ受信機216(A−N)は、復調される信号のために現周波数およびタイミング情報を制御プロセッサ220に供給するように監視できる周波数追跡要素も使用する。これは図4および図5に関して下記にさらに述べられる。
【0042】
制御プロセッサ220は、このような情報を使用し、必要に応じて同じ周波数バンドにスケールされる場合、局部発振器周波数に基づいて、期待された周波数から受信信号がどの程度までオフセットされたか決定する。周波数オフセット、周波数エラーおよびドップラーシフトに関連したこの情報および他の情報は、所望のように、1つあるいはそれ以上のエラー/ドップラー記憶あるいはメモリ要素236に記憶できる。この情報は、その動作周波数を調整するために制御プロセッサ220によって使用することができるかあるいはいろいろな通信信号を使用してゲートウェイに転送できる。
【0043】
少なくとも1つの時間基準要素238は、日付および時間のような時間情報を発生し、記憶するために使用され、衛星位置を決定するのに役立つ。時間は、周期的に記憶および更新できる。この時間はゲートウェイによって周期的に供給されてもよい。さらに、現時間は、ユーザターミナルがターンオフされるような非活動モードに入る度に記憶される。この時間値は、様々な時間依存信号パラメータおよびユーザターミナル位置変化を決定するためにターンオン時間とともに使用される。
【0044】
付加的記憶あるいはメモリ要素240および242は、下記にさらに詳細に述べられるパラメータについての特定の情報を記憶するために使用できる。例えば、メモリ要素240は、2つの到着信号間の相対周波数オフセットの差のようなレンジレートパラメータに対して行われるユーザターミナル測定値を記憶できる。
【0045】
メモリ要素242は、2つの信号に対する到着時間の差のようなレンジ差パラメータに対するユーザターミナル測定値を記憶するために使用できる。これらのメモリ要素は、当該技術分野で周知の構造および回路を使用し、個別あるいは別個の要素あるいはこの情報が後の検索のために制御されたやり方で記憶されるより大きな統合された構造として形成できる。
【0046】
図2に示されるように、局部あるいは基準発振器250は、入来信号を所望の周波数でベースバンドにダウン変換するためにアナログ受信機214のための基準として使用される。それは信号が所望のベースバンド周波数に到達するまで、所望のように、複数の中間変換ステップでも使用できる。図示のように、発振器250は、ベースバンドから逆方向リンク送信のための所望の搬送波周波数にアップ変換するためのアナログ送信機230のための基準およびタイミング回路252のための周波数標準あるいは基準としても使用される。タイミング回路252は、時間追跡回路、デジタル受信機216A−Nおよび218の相関器、送信変調器226、時間基準要素238および制御プロセッサ220のようなユーザターミナル200内の他の段あるいは処理要素のためのタイミング信号を発生する。タイミング回路252は、プロセッサ制御の下で、タイミングあるいはクロック信号の相対タイミングの遅れあるいは進みのための遅延を発生するようにも構成できる。すなわち、時間追跡は、所定の量だけ調整できる。これによってまた、コードの適用は、一般的には1つあるいはそれ以上のチップ期間だけ、‘正常’タイミングから進めるかあるいは遅らすことができるので、コードを形成するPNコードあるいはチップは所望のように異なるタイミングで適用できる。
【0047】
ゲートウェイ102で使用するための典型的な送信および受信装置300は図3に示されている。図3に示されたゲートウェイの一部は、当該技術分野で周知のいろいろな方式を使用してダウン変換され、増幅され、デジタル化される通信信号を受信するためのアンテナ310に接続されている1つあるいはそれ以上のアナログ受信機314を有する。多数のアンテナ310はいくつかの通信システムで使用される。アナログ受信機314によって出力されるデジタル化信号は、一般に324で破線によって示される少なくとも1つのデジタル受信機モジュールの入力として供給される。
【0048】
所定の変更が当該技術分野で公知だが、各デジタル受信機モジュール324は、ケートウェイ102と1つのユーザターミナル106との間の通信を管理するために使用される信号処理要素に対応する。1つのアナログ受信機314は、多数のデジタル受信機モジュール324に対する入力を供給でき、このような多数のモジュールは、任意の所与の時間に処理される衛星ビーム信号および可能なダイバーシチモード信号の全てを受け入れるために一般的にはゲートウェイ102で使用される。各デジタル受信機モジュール324は1つあるいはそれ以上のデジタルデータ受信機316およびサーチャー受信機318を有する。サーチャー受信機318は、一般にパイロット信号以外の信号の適切なダイバーシチモードを検索し、いくつかのサーチャーが検索速度を増加させるために平行して使用することができる。通信システムで実行される場合、多数のデジタルデータ受信機316A〜316Nがダイバーシチ信号受信のために使用される。
【0049】
デジタルデータ受信機316の出力は、当該技術分野で公知である装置を含む次のベースバンド処理要素322に供給され、ここでさらに詳細に示されていない。典型的なベースバンド装置は、マルチパス信号を結合して各ユーザのための1つの出力にするダイバーシチ結合器およびデコーダを含んでいる。典型的なベースバンド装置は、出力データを一般的にはデジタルスイッチあるいはネットワークに供給するインタフェース回路も含んでいる。ボコーダ、データモデム、およびデジタルデータスイッチング要素および記憶要素のような要素であるがこれに限定されないいろいろな他の公知の要素はベースバンド処理要素322の一部を形成してもよい。これらの要素は、1つあるいはそれ以上の送信モジュール334へのデータ信号の転送を制御あるいは指令するように作動する。
【0050】
ユーザターミナル106に送信される信号は、それぞれ1つあるいはそれ以上の適切な送信モジュール334に電気的に結合される。典型的なゲートウェイは、多数のこのような送信モジュール334を使用し、サービスを多数のユーザターミナル106に同時に、いくつかの衛星およびビームのために同時に供給する。ゲートウェイ102によって使用される送信モジュール334の数は、システムの複雑さ、通常見えている衛星の数、ユーザ容量、選択されたダイバーシチ度等を含む、当該技術分野で周知の因子によって決定される。
【0051】
各送信モジュール334は、送信のためのデータをスペクトル拡散変調し、出力デジタル信号のために使用される送信電力を制御するデジタル送信電力コントローラ328に電気的に結合される出力を有する送信変調器326を含んでいる。デジタル送信電力コントローラ328は、一般に混信減少および資源割り当ての目的のために最少の電力レベルを適用するが、送信パスおよび他のパスの転送特性の減衰を補償する必要がある場合、適切な電力レベルを適用する。PN発生器332は、信号を拡散する際に送信変調器326によって使用される。この符号生成は、ゲートウェイ102で使用される1つあるいはそれ以上の制御プロセッサあるいは記憶要素の機能部も形成できる。
【0052】
送信電力コントローラ328の出力は、他の送信電力制御回路からの出力と加算される加算器336に転送される。これらの出力は、送信電力コントローラ328の出力と同じ周波数でおよび同じビーム内で他のユーザターミナル106に送信するための信号である。加算器336の出力は、デジタル/アナログ変換、適切なRF搬送波周波数への変換、更なる増幅、フィルタリング、およびユーザターミナル106に放射する1つあるいはそれ以上のアンテナ340のためにアナログ送信機338に供給される。アンテナ310および340は、通信システムの複雑さおよび構成に依存する同じアンテナでもよい。
【0053】
少なくとも1つのゲートウェイ制御プロセッサ320は、受信機モジュール324、送信モジュール334、およびベースバンド回路322に電気的に結合されている。これらの装置は、互いから物理的に分離されてもよい。制御プロセッサ320は、コマンド信号および制御信号を供給し、これらに限定されないが、信号処理、タイミング信号発生、電力制御、ハンドオフ制御、ダイバーシチ結合およびシステムインタフェースのような機能を行う。さらに、制御プロセッサ320は、PN拡散コード、直交コードシーケンス、およびユーザ通信で使用するための特定の送信機および受信機あるいはモジュールを割り当てる。さらに、制御プロセッサ320は、パラメータを計算し、本発明の位置決め方法を実行するために使用することもできる。
【0054】
制御プロセッサ320は、パイロットの生成および出力、同期、ページングチャネル信号および送信電力コントローラ328とのそれらの結合を制御する。パイロットチャネルは、単にデータによって変調されない信号であり、反復不変パターンあるいは非変化フレーム構造を使用してもよい。すなわち、パイロット信号チャネルを形成するために使用される直交機能は、一般に全1あるいは0、あるいは散在された1および0の周知の反復パターンのような一定値を有する。
【0055】
制御プロセッサ320は送信モジュール334あるいは受信モジュール324のようなモジュールの要素に直接電気的に結合できるが、各々のモジュールは一般にそのモジュールの要素を制御する送信プロセッサ330あるいは受信プロセッサ321のようなモジュール専用プロセッサを備える。このように、好ましい実施形態では、制御プロセッサ320は、図3に示されるように、送信プロセッサ330および受信プロセッサ321に電気的に結合されている。このように、単一制御プロセッサ320は、多数のモジュールおよび資源の動作をより効率的に制御できる。送信プロセッサ330は、パイロット、同期、ページング信号およびトラフィックチャネル信号の生成及び信号電力、および電力コントローラ328へのそれらのそれぞれの結合を制御する。受信プロセッサ321は、探索(searching)、復調のためのPN拡散コード、受信電力を監視することを制御する。プロセッサ321は、本発明の方法で使用される信号パラメータを決定する際に使用できるかあるいはこのようなパラメータに関するユーザターミナルから受信される情報を検出あるいは転送でき、それによって制御プロセッサ320の負担を減少させる。
【0056】
本発明の実施形態を実現するために、一つ或いはそれ以上の事前補正器或いは周波数事前補正要素342及び344が使用されてよい。好ましくは、事前補正要素342はベースバンド周波数においてディジタル電力コントローラのディジタル出力の周波数を調整するために使用される。ユーザターミナルにおいて、周波数調整を含んだベースバンドスペクトル情報はアナログ送信機338で実行されるアップコンバージョン(up−conversion)の間に適切な中心周波数に変換される。周波数事前補正は上述された複素信号回転のような、本分野で既知の技術を用いて達成され、そこで回転の角度は既知の衛星の天体位置表及び望まれるチャネル周波数に基づいて計算される。ユーザターミナルにおいて、他の信号回転技術及び関連したハードウェアを本発明の精神と範囲から逸脱せずに使用することが出来る。
【0057】
周波数事前補正に加えて、信号或いはPN符号の相対タイミングを変えるために時間事前補正を設けるようとする要請があるかもしれない。これは信号がベースバンドで生成され電力コントローラ328によって出力される前に、符号の生成及びタイミング或いは他の信号パラメータのタイミングのいずれかを調整することによって一般に達成される。例えばコントローラ320は、信号が送信変調器326によって処理され電力コントローラ328によってさまざまな衛星へと送信される時と同様に、符号が生成される時、それらの相対タイミング及び信号への適用を決定することができる。しかしながら、事前補正要素342及び344の一部を構成するか或いはそれらに類似の(示されない)分離したユニットとして既知の時間事前補正要素或いは回路は、望まれるなら、周波数事前補正要素なしで或いはそれらに追加して使用することができる。
【0058】
図3において、事前補正器342は加算器336の前の伝送パス上に配置されて示される。このことは望まれるならば各ユーザターミナルの信号に対して個別の制御を可能にする。しかしながら、加算器336の後で事前補正が行われる場合は単一の周波数事前補正要素を使用することができる。なぜなら、ユーザターミナルはゲートウェイから衛星への同じ伝送パスを共有するからである。
【0059】
代わりとして、事前補正器344は、良く知られた技術を用いて出て行く信号の周波数を調整するためにアナログ送信機338の出力の伝送パス上に配置することができる。しかしながら、アナログ送信機の出力で周波数を変えることはより困難になる可能性があり、信号のフィルタリング過程と干渉するかもしれない。或いは、アナログ送信機338の出力周波数は、通常の中心周波数からずらされた(offset)シフトされた出力周波数を提供するために制御プロセッサ320によって直接調整することができる。
【0060】
出て行く信号に課せられる周波数補正の量は、それを介して通信が確立されているゲートウェイと各衛星との間の既知のドップラーに基づいている。衛星のドップラーの責任をとる(account for)ために必要とされるシフトの量は既知の衛星軌道の位置データを用いて制御プロセッサ320によって計算することができる。このデータは、ルックアップテーブル或いはメモリ要素のような一つ或いはそれ以上の記憶要素346に保持するか或いはそこから引き出すことができる。このデータはまた、望まれるならば他のデータ源から供給されてもよい。RMAおよびROM回路のような様々な良く知られた装置、或いは磁気記憶装置が記憶要素346を作るために使用できる。この情報は、指定された時刻にゲートウェイによって使用されている各衛星に対してドップラー調整を確立するために使用される。
【0061】
図3に示されるように、時間及び周波数ユニット(TFU)348はアナログ受信機314に対して参照周波数信号を提供する。GPS受信機からの万国(Universal)時間信号はいくつかの応用でこの過程の一部として使用される。望まれるならば、それはまた複数の中間変換ステップで使用することができる。TFU348はまたアナログ送信機338に対する参照としても役立つ。TFU348はまたディジタル受信機316A−N及び318の相関器、送信変調器326、制御プロセッサ320のようなゲートウェイの送信及び受信装置300内の他の段或いは処理要素に対してタイミング信号を供給する。TFU348はまた望まれるならば、プロセッサ制御の下、予め定められた量だけ(クロック)信号の相対タイミングを遅らせたり進めたりするように構成される。
【0062】
タイミング測定を実行するためのある実施形態が図4に示され、ユーザターミナルに対する時間追跡ループ400を示す。このタイプの時間追跡ループは当該技術分野で知られているようにタウ(Tau)ディザ(Dither)タイプと呼ばれる。図4において、アナログ受信機から入ってくる通信信号は通常オーバーサンプルされ(oversampled)、次にデシメータ402に入力される。デシメータ402は受信機の後の段へただ一定のサンプルを転送するために予め選択されたレートとタイミングで動作する。
【0063】
間引かれた(decimated)サンプルは、信号を逆拡散するためにPN発生器或いはソース(source)406によって供給される適切なシステムPN拡散符号と共に結合させるために通常は乗算器である結合要素404へ転送される。逆拡散された信号は結合要素408へと転送される。そこにおいて逆拡散された信号は、データを得るために、使用されるならば符号発生器或いはソース410によって供給される適切な直交符号関数Wiと共に結合される。直交符号関数は通信信号チャネルを作るために使用されるものである。一般に、他の強い信号が使用できても、パイロット及びページング信号がこの目的のために使用される。それゆえ直交符号は、当該技術分野で知られているように、一般にパイロット或いはページング信号を生成するために使用されるものである。或いは、当該技術分野で知られているように、PN拡散及び直交符号は一緒に結合して、そして単一ステップでサンプルと結合することができる。
【0064】
時間追跡回路は上述した米国特許第4,901,307号で開示された“早い/遅い”方式を使用することができる。このアプローチでは、入って来る信号のとディジタル受信機216のタイミングが同じ或いはそろっている程度が、通常のチップ時間からずれたところで入って来るデータストリームをサンプリングすることによって測定される。このオフセットはプラス或いはマイナスの半PN符号チップ周期のいずれかであり、それぞれ遅い或いは早いのいずれかとして呼ばれる。
【0065】
プラス或いはマイナスのオフセットデータのタイミングが通常の逆拡散された入って来る信号のピークのタイミングから対称的にずれるならば、“遅い”及び“早い”サンプリング値の間に形成される差はゼロである。即ち、“遅い”及び“早い”信号の間の差を形成することによって作られる値は、半チップのオフセットの中心が受信された信号の“時間どおり(on−time)”のタイミングにあるならばゼロに向かう。もし受信機216によって使用される相対タイミングが受信された信号のタイミングを正確に追跡しないで、入ってくる信号データに対して相対的に早いならば、“遅い−マイナス−早い”の差は正の値の補正信号を生ずる。他方、もし信号のタイミングが遅すぎるならば、差は負の値の補正信号を生ずる。逆の或いは他の関係も望まれるならば使用できることは容易に明らかである。
【0066】
この技術を実現するために、デシメータの出力は通常信号を復調するために使用されるより半チップ早く生ずるように制御される。デシメータの出力は次に逆拡散され復号され、その結果のデータは累算器414において予め選択された期間(通常は1シンボル期間)に渡って累算される。累算されたシンボルデータはシンボルエネルギーを与え、それは二乗要素416で二乗されて“早い”信号に対して非負の大きさの値を与える。
【0067】
サンプルのもう一つのセットは、累算器414を用いてその後の予め選択された期間に渡って累算及び合計されるか或いは積分される。しかしながらこの期間の間、遅延要素の組412はPN及び直交符号の適用を1チップ期間だけ遅らせるために使用される。これはサンプル或いは間引き(decimation)のタイミングを変更することと同じ効果を有し、逆拡散及び復号されたデータの“遅い”バージョン(version)を生ずる。逆拡散及び復号されたデータは累算器414において予め選択された期間に渡って累算される。望まれるならば更なる要素や記憶装置を使用することができる。累算された遅いシンボルデータは二乗要素416で二乗される。結果となる早い或いは遅い二乗された値は、互いに引き算されるか、或いは要素418で所望の早い/遅いタイミングの差を生ずるために比較される。この差はタイミングフィルタ420を用いてフィルタにかけられ“前進/遅れ”信号422を与える。時間追跡ループは早い及び遅いシンボルを生ずるために遅延されていない符号及び遅延された符号を用いることの間を交互に繰返し続ける。早い及び遅いシンボルは“前進/遅れ”信号422のための値を更新或いは生成するために使用される。このことは、関連分野の当業者には明らかであるが、受信機が停止させられた或いは新しい信号を捕捉することへシフトさせられた時のように受信機のタイミングがリセットされるまで続く。
【0068】
間引きの過程に対する最初及び進行中のタイミング制御、及び符号の遅延はタイミング制御回路424のような回路によって提供される。即ち、タイミング制御回路424はデシメータ402からのサンプル選択のタイミングを決定する。同時に、PN拡散及び直交符号の生成はまたタイミング制御回路424からの信号によって制御される。この後の方のタイミングはしばしばPN−可能(enable)と呼ばれる。なぜならそれは符号の適用を可能とするからである。また、初期化或いはEPOCHタイミング信号もあってよい。タイミング制御回路424によって選択されたタイミングはタイミングループの出力に応じて“前進/遅れ”信号422によって調整される。一般に、間引きの前に入力信号を集めるために、タイミングはチップ期間の一部となる時間の長さ、例えば8倍オーバーサンプリング(oversampling)が用いられるときは1/8チップだけ進められる。このようなタイミングの使用そして前進及び遅れの機構は当該技術分野でよく知られている。
【0069】
それぞれのフィンガー或いはディジタル受信機が入力信号に同期させる或いは揃えるために調整するタイミングの量は信号の到着時刻の相対的な遅延を決定するために使用される。これはタイミングループ400によって使用される時間変化の総量(前進/遅れ)を追跡することによって容易に達成される。累算器426は予め選択された期間に渡って前進/遅れ信号のそれぞれ或いはコマンドを単に累算及び和をとるために使用することができる。これは入ってくる信号及び受信機のタイミングを揃えるために必要とされる変化の全体或いは正味の量を与える。これはローカルなユーザターミナル或いは受信機のタイミングからの信号のオフセットを表す。ユーザターミナルのタイミングがゲートウェイに比較的近い或いは同期している場合は、これは信号がゲートウェイとユーザターミナルの間を通過するときに信号が経験する遅延の基準を与えることができ、レンジ(range)の計算を可能にする。残念ながら、ローカル振動子の不正確さ或いはドリフトのような多くの要因は一般にそのような直接計算を妨げる。
【0070】
以前述べたように、このデータは他のメッセージの一部として或いは個別の時間情報の信号としてゲートウェイに送信することができる。このデータは後の転送及び使用のために一時的なメモリ要素に保持することができる。また情報は収集の時刻を反映するある形式の“時刻の刻印”と共に提供されるか或いは保持されることが可能で、そのためゲートウェイはデータに対する正確な時間関係を有し、ユーザターミナルの位置をより正確に決定することができる。しかしながら、上述された通信システムで望まれる正確さは非常に厳しい要請ではない。情報が収集から大変短い時間以内に送信されるならば、時刻を刻印することは非常に有用というわけではない。一般に、データはその測定の僅かなデータフレームの間に送られ、そして転送の問題がある場合は、データは僅かなフレーム以上に古くならないように転送前に再び生成される。しかしながら、時刻を刻印することはデータ送信におけるより高い柔軟性、及び実時間を考慮しない信号或いは信号の組の繰り返された転送を可能にする。他方、望まれるレベルの正確さを維持するために時刻を刻印することが用いられない場合、システムは多分固定のタイミングスロットを使用し要求を報告する。
【0071】
その過程は、パイロット信号が検出されずそして直交符号が一般にアクセス探査(probe)信号と関連付けられていることを除くと、ゲートウェイによって受信される信号に対するのに似ている。ゲートウェイにとっての一つの利点はタイミングが絶対時間の基準として考えることができることである。即ち、上述したようにゲートウェイは正確なシステムタイミングを有しており、それ自身の時間に相対的なPN或いは直交符号の適用に対する時間差を正確に決定することができる。このことはゲートウェイに、それぞれの受信機或いはフィンガーに対して使用されているPN符号の状態から正確な通過時間或いは距離を決定することを可能にする。これらの通過時間或いは距離は本発明のレンジパラメータの決定において使用することができる。それゆえ、いくつかの応用では便利であるが、前のようにそれぞれのフィンガーに対する情報は別々に扱うことができ、要素428を用いて結合する必要がない。
【0072】
周波数測定を実行するための一つの実施形態は図5に示されており、それはユーザターミナルに対する周波数追跡ループ500の概略を示す。これらの周波数測定は本発明のレンジレートパラメータの決定において使用することができる。図5において、アナログ受信機からの通信信号は回転器502への入力である。回転器502は、ディジタル受信機或いはフィンガーにおいてアナログ受信機から到着するディジタルのサンプルから残留周波数誤差或いはオフセットを取り除くために予め選択されているが調整可能な位相で動作する。
【0073】
CDMAタイプの信号が使用されるとき、サンプルは、データを得るために一つ或いはそれ以上の符号発生器或いはソース506によって提供される適切なシステムPN拡散符号で結合するために、典型的には乗算器である一つ或いはそれ以上の結合要素504に転送することができる。そのようなPN拡散及び直交符号は単一のステップで別々に或いは一緒に信号と結合することができる。周波数を調整するためにトラヒックチャネルが使用される場合、高速アダマール変換(FHT)要素が結合器504及び符号発生器506の代わりに使用されてよい。この技術は本発明の譲受人に譲渡され、参照としてここに組み込まれる、“直交ウォルシュ変調のための周波数追跡(Frequency Tracking For Orthogonal Walsh Modulation)”と題される米国特許出願番号第08/625,481号において開示される。
【0074】
回転され、逆拡散され、復号された信号はデータシンボルを与えるために累算器514において1シンボル期間に渡って累算され、結果はベクトルクロス積発生要素或いは発生器518に提供される。同時に、各シンボルは、シンボルをクロス積発生器518に転送する前に1シンボル期間の遅延を与える1シンボル時間遅延要素516に供給される。
【0075】
クロス積発生器518はシンボル間の位相の変化を決定するために与えられたシンボルと先行するシンボルとの間のベクトルクロス積を形成する。これは入力信号に加えられた位相回転における誤差の尺度を与える。クロス積発生器518からの出力は回転器502及び符号発生器506へ周波数誤差の推定或いは調整係数として提供される。
【0076】
逆拡散及び復号の過程に対するタイミングコントロールは、上述したようにタイミングコントロール回路524のような回路によって提供される。このタイミングは上述のタイミングループからの出力として提供されてよい。
【0077】
入力信号に揃えるために各フィンガー或いはディジタル受信機がその位相を調整する量は到着する信号における相対的な周波数オフセットを決定するために使用される。即ち、信号が揃うことにおける残留誤差を取り除くために調整されなければならない回転器の位相の量は到着する信号周波数がユーザターミナルに対する期待された或いは局所的な基準の周波数からずれている量を示す。
【0078】
通信システムは通信信号に対して周波数バンドの固定された組の範囲で動作するので、受信機は使用する中心或いは公称キャリア周波数を知っている。しかしながら、ドップラーシフト及び他の効果の結果として、それらは最小であるかもしれないが、到着する信号は期待された中心周波数にはないだろう。上で議論された調整はオフセットを定義し、オフセットはドップラーシフト及び到着する信号の実際の周波数を決定するために使用できる。
【0079】
これは周波数追跡ループ500によって実現される変化の総量を追跡することによって容易に達成される。累算器522は予め選択された期間に渡って、誤差推定からの位相変化、信号、或いはコマンドを単に累算するために使用することができる。これは入ってくる信号及び受信機の周波数を揃えるために必要とされる変化の全体或いは正味の量を与え、ローカルなユーザターミナルからの信号或いは受信機の周波数の適当な周波数バンドに調整された周波数オフセットを表す。
【0080】
前のように、このデータは他のメッセージの一部として或いは個別の周波数情報の信号としてゲートウェイに送信することができる。このデータは後の転送のために一時なメモリに保持することができ、またある形式の“時刻の刻印”と共に提供され得る。しかしながら、データはその測定の僅かなデータフレームの間に送られそして問題がある場合は再生成することができるので、このことは一般には必要がない。他方、望まれるレベルの正確さを維持するために時刻を刻印することが用いられない場合、システムは多分固定のタイミングスロットを使用し要求を報告する。
【0081】
III. 利用可能なパラメータ
好ましい実施形態において、本発明は二つのパラメータ:レンジ及びレンジレート、を用いる。これらのパラメータはユーザターミナル106及び衛星104の間の空間的及び時間的関係を記述する。これらのパラメータ、及びそれらの測定および応用は以下に示される。
【0082】
図6はこれらのパラメータを表す等高線の地表上への投影を描く。パラメータの等高線は同じ値のパラメータを有する全ての点を繋いだ曲線である。図6は衛星104のサブポイント614(すなわち、衛星の直下の地表上の点)と衛星104に関するレンジ及びレンジレートパラメータに対する等高線の地表上への投影を描く。千キロ毎に目盛りがつけられたx軸602A及びy軸602Bの2つの軸は代表的な規模を示すために与えられる。
【0083】
レンジ. レンジパラメータは衛星とユーザターミナルの間の距離を表す。本発明の好ましい実施形態において、レンジパラメータは衛星104およびユーザターミナル106の間の距離Rである。Rの等高線の地表への投影は、図6の604で一般的に示されるように、関係する衛星の下を中心とした円を描く。本発明の好ましい実施形態において、Rは、衛星104からユーザターミナル106へ送信されそして同じ衛星104へ戻る信号の往復遅延(RTD)を測定することによって得られる。そしてRは、片道遅延を生ずるためにRTDを2で割り、その結果を信号の速度を表す光速で乗ずることによって決定される。別の実施形態では、RTDはレンジパラメータとして使用される。
【0084】
本発明の好ましい実施形態において、RTDは以下の方法によって測定される。初めに、既知の使用中のPN系列或いは拡散符号を含んだ信号がゲートウェイ102によって送信される。その信号は衛星104によってユーザターミナル106へ中継される。ユーザターミナル106は信号を直ちに或いは既知の遅延の後に再送する。再送された信号は同じ衛星104によってゲートウェイ102へと中継されて戻される。次にゲートウェイ102は受信された信号のなかのPN系列の状態をローカルなPN系列の状態と比べる。そして状態の違いは、ゲートウェイ102及び衛星104の間の既知の遅延を含む全往復遅延を決定するために使用される。関連する技術でよく知られているように、衛星104及びゲートウェイ102の間の距離はゲートウェイ102によって維持されているのでこれらの遅延は既知である。全往復遅延からこれらの既知の遅延を引き去ることによってRTDを生ずる。既知の衛星の天体位置表を用いて、ゲートウェイ102及び衛星104の間の既知の遅延は当該技術分野で良く知られたさまざまな方法で計算される。
【0085】
当業者にとって明らかなように、本発明の精神と範囲から逸脱することなくRを得るために他の方法も使用することができる。
【0086】
本発明の好ましい実施形態において、通話中あるいは呼設定中に往復遅延を測定することができる。呼設定中に測定を行う場合には、通常、測定された信号がページング信号の一部として、ゲートウェイ102からユーザターミナル106へ送信され、さらに、アクセス信号の一部としてユーザターミナル106からゲートウェイ102へ再送信される。通話中に測定を行う場合には、通常、測定された信号がゲートウェイ102からユーザターミナル106へと送信され、さらにトラフィック信号の一部として戻る。当業者にとって明らかであるように、所望であれば、本発明の精神および範囲を逸脱しない限り、測定された信号は別タイプの信号であってもよく、あるいは別の信号に組込まれていてもよい。
【0087】
レンジレート. レンジレートパラメータは、ユーザターミナル106と衛星104との間の相対的な半径方向速度を表すものである。本発明の好ましい実施形態において、レンジレートパラメータは、ユーザターミナル106と衛星104との間の相対的な半径方向速度
【数1】
【0088】
である。本発明の別の実施形態において、レンジレートパラメータは、ユーザターミナル106と衛星104との間で送信される信号内のドップラーシフトRTDopである。
【数2】
【0089】
は、RTDopに光の速度を掛け、中心キャリヤ周波数で割ることにより求めることができる。地球の表面上へのRTDopの等高線の投影は、概して第6図の606に示すように、関連する衛星の速度ベクトル616に対して対称的な、双曲線状の曲線の組を表す。衛星104のサブポイント614を通過するRTDop=0の等高線は直線を示す。
【0090】
本発明の好ましい実施形態において、
【数3】
【0091】
は、以下に示す方法によって、1つはユーザターミナル106、もう1つはゲートウェイ102における2つの周波数測定を行うことにより決定される。ユーザターミナル106は、衛星104を介してゲートウェイ102から受信した信号の周波数を測定し、この周波数をゲートウェイ102に報告する。ゲートウェイ102は、同じ衛星104を介してユーザターミナル106から受信した信号の周波数を測定する。従って、ゲートウェイ102において2つの周波数を測定することが可能である。好ましい実施形態では、周波数は局部発振器周波数に関連して測定される。次に、以下に示すように実周波数が得られる。この技術は、本明細書中で参照として組み込まれる、出願番号(指定されることになっている、代理人名簿番号PA300)を持つ、同時継続の、また一般所有の同時継続出願である”通信システムにおける周波数オフセットの決定(Determination Of Frequency Offsets In Communication Systems)”にも開示されている。
【0092】
これらの測定は、2つの未知数、すなわち、相対的な半径方向速度
【数4】
【0093】
と、ユーザターミナル106の局部発振器の正規化オフセットfoff/f0を含む2つの方程式によって表すことができる。この方程式の対は、これら2つの未知数に対して解くことができ、
【数5】
【0094】
を与えるだけでなく、関連技術における当業者にとって明白であるように、衛星通信システムのオペレーションの他の局面において有用な測定であるfoff/f0をも与える。
【0095】
これら2つの方程式の誘導は、図7A、図7Bのように図によって描写できる。図7Aは、ユーザターミナル106において測定された周波数の構成要素を図示したものである。図7Bは、ゲートウェイ102において測定された周波数の構成要素を図示したものである。
【数6】
【0096】
= 衛星104とユーザーターミナル106との間の相対半径速度
C=伝搬速度(光の速度)
fF=順リンク公称周波数
fR=逆リンク公称周波数
f0=ユーザターミナル106の局部発振器の公称周波数
foff=ユーザターミナル106の局部発振器の周波数オフセット
foff/f0=ユーザターミナル106の局部発振器の正規化周波数オフセット
図7Aを参照すると、ユーザターミナル106で測定された周波数は以下で与えられる:
【数7】
【0097】
図7Bを参照すると、ゲートウェイ102で測定された周波数は以下で与えられる:
【数8】
【0098】
(1)と(2)を足し引きすることにより、以下の関係に従って、周波数オフセットと相対的な半径方向速度の両方が与えられる:
【数9】
【0099】
関連技術における当業者にとって明らかであるように、本発明の精神および範囲を逸脱せずに、別の方法を利用して
【数10】
【0100】
を求めることもできる。
【0101】
本発明の好ましい実施形態において、通話中、または呼設定中に周波数の測定を行うことができる。呼設定中に周波数の測定を行う場合は、ユーザターミナル106で測定された信号はページング信号であり、ゲートウェイ102で測定された信号はアクセス信号である。通話中に周波数の測定を行う場合は、ユーザターミナル106およびゲートウェイ102で測定された信号はトラフィック信号である。関連技術における当業者に明らかであるように、本発明の精神および範囲を逸脱しない限り、別の信号を利用することも可能である。
【0102】
IV. 位置決め方法
上述した2つのパラメータを、ユーザターミナル106の位置を決定するために使用することができる。本発明を理解するための補助として、パラメータの物理的な表示を、地球の表面上に投影されたパラメータの等高線として示している。
【0103】
本発明の好ましい実施形態において、位置決めはレンジおよびレンジレートパラメータに基づいている。図6において、レンジパラメータはRであり、レンジレートパラメータはRTDopである。図6によれば、ユーザターミナル106と衛星104との問の2000kmの範囲を示す円を形成する1つのRの等高線が描写されており、これを概して604で示している。
【0104】
図6はまた、RTDopの等高線の族を、概して606で示して描写している。RTDopの等高線は双曲線状であり、衛星104の速度ベクトル616に対して対称的である。RTDopの等高線の各々は、衛星104に関して同じドップラーシフトを経験する地球の表面上のこれらの点を接続する。RTDopの等高線はkHzで目盛られ、RTDop=0の等高線は衛星104のサブポイント614を通過する。
【0105】
この位置決め方法には問題が2つある。1つは位置の不明確さである。例えば、R=2000kmで、RTDop=+30kHzの場合を考える。図6を参照すると、R=2000kmの等高線は、610A、610Bの2点においてRTDop=+30kHzの等高線と交差する。さらに情報を得なければ、ユーザターミナル106が点610Aにあるか、あるいは610Bにあるかを決定することはできない。従って、この解決は不明確である。
【0106】
2つ目の問題は、精度の幾何学的な希薄化(Geometric Dilution of Precision)(GDOP)として知られている。GDOP特異性は、測定における小さな誤差が位置解決における大きな誤差を引起す際に生じる。図6のポイント610Cに示すように、レンジおよびレンジレートの等高線が接しているかまたはほぼ接している場合、どちらのパラメータの小さな誤差も大きな位置誤差を生じてしまう。さらに位置情報を得なければ、レンジおよびレンジレートパラメータのみを使用する位置決め方法はGDOP特異性の問題を抱える。
【0107】
これらの問題は少なくとも2つの方法で解決できる。第1の方法は情報を追加することであり、これにより位置の不明確とGDOP特異性の両方を解決できる。この情報は、追加の測定を行うことにより、あるいは、どの衛星のビームが使用されているかといった他のパラメータの使用により得ることができる。このような技術の1つは、出願番号(指定されることになっている、代理人名簿番号PD456)を持つ、同時継続の、また一般所有の同時継続出願である、”衛星ビームを用いた不明確な位置解決に対する不明確な解像度(Ambiguity Resolution For Ambiguous Position SolutionsUsing Satellite Beams)”に開示されている。第2の方法は、最後の公知位置のような、ユーザターミナル106の位置の適切な推測から開始することである。
【0108】
図8は、本発明の好ましい実施形態の動作を示すフローチャートである。上述したように、また工程802に示すように、1つ以上のレンジパラメータが決定される。上述したように、また工程806に示すように、1つ以上のレンジレートパラメータが決定される。次に、工程810に示され、以下に説明するように、衛星の既知の位置および速度と、レンジおよびレンジレートパラメータとに基づいて、地球の表面上のユーザターミナルの位置が決定される。
【0109】
V. 位置決め実行
位置決め実行について詳細に述べる前に、まず、本発明の位置決め方法が動作できる例証的環境を説明することが有用である。図9は、このような例証的環境を示すブロック図である。この環境は、制御プロセッサ220および/または制御プロセッサ320の一部を形成することができるコンピュータシステム900である。コンピュータシステム900は、プロセッサ904といった1つ以上のプロセッサを備えている。プロセッサ904は通信バス906に接続している。この例証的コンピュータシステムに関して様々な実施形態が説明されている。この説明を読んだ後に、関連技術における当業者には、他のコンピュータシステム、コンピュータアーキテクチャ、ハードウェア状態マシン、ルックアップテーブル等、およびこれらの様々な組合せを使用して、本発明の位置決め方法をどのように実行するかが明らかになるであろう。
【0110】
コンピュータシステム900はまた、好ましくはランダムアクセスメモリ(RAM)であるメインメモリ908を備え、またさらに、2次メモリ910を備えることもできる。2次メモリ910は、例えば、ハードディスクドライブ912および/またはフロッピー(登録商標)ディスクドライブ、磁気テープドライブ、光ディスクドライブ等の取外し可能な記憶ドライブ914を備えることができる。取外し可能な記憶ドライブ914は、公知の方法によって、取外し可能な記憶ユニット918からの読取り、および/または取外し可能な記憶ユニット918への書込みを行う。取外し可能な記憶ユニット918にはフロッピー(登録商標)ディスク、磁気テープ、光ディスク等がある。理解されるように、取外し可能な記憶ユニット918は、コンピュータソフトウェアおよび/またはデータを記憶したコンピュータが使用可能な記憶媒体を備えている。
【0111】
別の実施形態において、2次メモリ910は、コンピュータプログラムあるいは他の指示をコンピュータシステム900内にロードさせるための他の類似する手段を備えていてもよい。このような手段には、例えば、取外し可能な記憶ユニット922、インターフェース920がある。これらは、プログラムカートリッジ、カートリッジインターフェース(ビデオゲーム装置に内臓されているようなもの)、取外し可能なメモリチップ(EPROMまたはPROM)および関連するソケット、また、取外し可能な記憶ユニット922からコンピュータシステム900へソフトウエアやデータを転送するその他の取外し可能な記憶ユニット922およびインターフェース920を含む。
【0112】
コンピュータシステム900はさらに、通信インターフェース924を備えることができる。通信インターフェース924によって、コンピュータシステム900と外部装置との間で、通信パス926を介してソフトウェアやデータを転送することができる。通信インターフェース924には、例えば、モデム、ネットワークインターフェース(例えばイーサネット(登録商標)カード)、通信ポート等がある。
【0113】
通信インターフェース924を介して転送されるソフトウェアおよびデータは、電子、電磁波、光学の信号形式、または通信パス926を介して通信インターフェース924による受信が可能な他の信号といった信号形式であってよい。
【0114】
本発明の位置決め方法の動作は、例証的環境に関連して説明している。その理由は便宜性のみを目的としたものである。本発明の位置決め方法の動作はこの例証的環境での使用に限定されるものではない。事実、以下の説明を読めば、関連技術における当業者には本発明の位置決め方法を別の環境で実行する方法がわかるであろう。
【0115】
本発明のある実施形態において、コンピュータシステム900に関して下記に示した位置決め方法を実施することにより、ユーザターミナル106の位置が決まる。当業者にとって明白である様に、この位置決め方法は、今回の発明の意図に沿った範囲内で、ハードウェア状態機械またはルックアップテーブル(look−up tables)などによって実施できる。
【0116】
本発明の好ましい実施形態において、位置決めに使用するMパラメータから成るzで示したパラメータのM×1ベクトルが構成される。ベクトルzは、上記で説明した各々のパラメータの1個または複数を含むことができる。当該技術において公知の様に、このパラメータは、ユーザターミナルの位置の2次元べクトルx、即ち
(5) x=[lat long]T
ここでTはマトリクスまたはベクトルの転置を示すのであるが、このxの下式に従った非線形関数である:
(6) z=h(x)+v
ここで、M×1ベクトルvは測定誤差を表し、hは非線形関数を表し、実測パラメータおよびユーザターミナル106位置との間の関係を示す。またhは、衛星104Aおよび104Bの位置および速度の関数でもある。別の実施形態において、(7)式に示す様に、ユーザターミナル位置ベクトルxは、緯度および経度の代わりに、3個のデカルト座標で定義できる。
【0117】
(7) x=[xyz]T
ガウスの線形化手法に従って、ユーザターミナル106の位置を決定するためにM×Kの偏導関数マトリクスHを構成する。ここで、Kは未知の位置の数であり、Hの(m,k)成分は、k番目の位置パラメータに関するm番目の測定の偏導関数であり、所与の位置xで決まる。例えば、式(5)の様に、位置ベクトルが経度および緯度を表示する場合、Kは2に等しく、マトリクスHのk=1の列の成分はユーザターミナル106の緯度に関する偏導関数を示し、またk=2の列の成分はユーザターミナル106の経度に関する偏導関数を示す。位置ベクトルをデカルト座標(K=3)で表した場合、Hのk=(1,2,3)の列はそれそれ(x,y,z)座標を示す。デカルト座標系を使用する場合、式を1つ追加して、各座標を2乗した値の合計が、地球半径の2乗に等しいことを表示する。xおよびHの関係は下式で与えられる。
【数11】
【0118】
反復荷重最小二乗法を使用して、未知の位置パラメータを決定する。本発明の好ましい実施形態において、使用する方法は、H.W.ソレンソンが「パラメータ評価の原理および課題」ニューヨーク、マーセルデッカー1980で発表した荷重ガウス・ニュートン手法である。反復式は下記の関係で表される。
【数12】
【0119】
ここで、
【数13】
【0120】
はそれぞれ「現在の」、及び「次の」位置の推定であり、WはM×Mの荷重マトリクスである。下付き添字iは反復回数を表し、i=0が最初の反復を表す。推定位置に基づくマトリクスまたはベクトルには、上付き添字「^」を付けて表す。ユーザターミナル106の最後に知られている位置のようなの基準点を、最初の推定位置として選択する。最新位置が未知の場合、ゲートウェイ102の位置等の任意の位置を使用して構わない。
【数14】
【0121】
は、現在位置の推定値で決定される偏導関数マトリクスであり、また
【数15】
【0122】
は、予想される誤差の影響を受けないパラメータであり、現在の位置推定を使用して決定される。この反復は
【数16】
【0123】
の間の差分が所定の閾値を下回る場合に終了する。
【0124】
関連技術における当業者にとっては自明であるが、この閾値は、システムの精度に基づいてシステムの設計者および/またはオペレータによって決定される。例えば、この閾値は測定のチップ精度およびチップ速度に基づいていてよい。
【0125】
未知数よりもパラメータ数の方が多い場合、M×Mの荷重マトリクスWの成分は、推定位置x^に於ける特定のパラメータの影響を強調する手段を提供する。好ましい実施形態において、荷重マトリクスWは対角マトリクスとなり、その成分は、それぞれのパラメータを決定する相対的な精度を反映する。この様に、関連技術の当業者にとって明白である通り、成分の値は、システムの既知の測定精度に基づき設定される。従って、非常に高精度の測定に基づいたパラメータは、正確に測定できないパラメータよりも高い重要性が与えられる。荷重マトリクスの成分は予め定められた値へと初期化されるが、動的に調整することが可能である。測定誤差の共分散マトリクスの逆マトリクスとして荷重マトリクスが選択されると、最適な精度が得られる。
【0126】
測定誤差が、相互に独立で、平均がゼロで分散が以下であるならば:
【数17】
【0127】
Wはσ2mを対角要素とする対角マトリクスである。
【0128】
この様にWを選択すると、推定された位置ベクトルxのk番目の成分の分散は下記で与えられる:
【数18】
【0129】
最後に、距離の単位での結合された理論的な水平方向の位置の誤差は下記で与えられる:
【数19】
【0130】
ここで、REは地球の半径である。
【0131】
好ましい実施形態において、位置決め方法は、地球表面に対して滑らかな楕円体モデルを使用する。別の実施形態において、位置決め方法は、WGS−84地球モデルの様な地球表面に対して滑らかな楕円体モデルを最初に使用する。x^iおよびx^i+1の間の差が所定の閾値未満となるようにxの値が収束したときに、詳細なデジタル地形モデルに滑らかなモデルが取り替えられ、そして、x^iおよびx^i+1の間の差が第2の所定の距離閾値未満になるようにxの値が収束するまで反復は継続される。この様にして、ユーザターミナル106の高度上昇に伴うあらゆる誤差を軽減する。別の実施形態においては、所定の回数の反復の後に、詳細なデジタル地形モデルに取り替えられる。上記で説明した距離閾値および反復の回数は、当業者にとって自明であるように、様々な要因に従って決定される。
【0132】
VI.結論
本発明の様々な実施形態を上記に説明したが、上記は例を記したものであり、これに限定されない。当業者にとって自明である通り、本発明の精神と範囲から逸脱することなく、様々な形態や細部の変更がなされてよい。従って、本発明は、上記で説明した実施形態に制限されず、下記の請求の範囲および関連請求に従ってのみ定義される。
【特許請求の範囲】
【請求項1】
衛星通信システムのための位置決定システムであって、
ユーザターミナルと、
既知の位置及び既知の速度を有する少なくとも1つの衛星と、
前記少なくとも1つの衛星を通じて前記ユーザターミナルと通信するためのゲートウェイと、
レンジパラメータを決定するためのレンジパラメータ決定手段と、
レンジレートパラメータを決定するためのレンジレートパラメータ決定手段と、
前記衛星の既知の位置及び既知の速度、前記レンジパラメータ並びに前記レンジレートパラメータに基づいて、地球表面上における前記ユーザターミナルの位置を決定するための前記ゲートウェイ内の位置決定手段と
を有する位置決定システム。
【請求項2】
前記レンジパラメータは前記衛星及び前記ユーザターミナル間の距離を表す請求項1に記載の位置決定システム。
【請求項3】
前記レンジパラメータは往復遅延を表し、前記位置決定システムは信号の往復遅延を測定するための往復遅延測定手段を前記ゲートウェイ内にさらに有し、前記信号は前記ゲートウェイから前記衛星を通じて前記ユーザターミナルへ送信され、かつ前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ再送信される請求項1に記載の位置決定システム。
【請求項4】
前記レンジレートパラメータは前記衛星及び前記ユーザターミナル間の相対的な半径方向速度を表す請求項1に記載の位置決定システム。
【請求項5】
前記レンジレートパラメータは第1信号及び第2信号の周波数測定値を表し、前記位置決定システムは、
前記ゲートウェイから前記衛星を通じて受信した前記第1信号の周波数を測定するための前記ユーザターミナル内に設けられた第1周波数測定手段と、
前記第1信号の周波数測定値を前記ゲートウェイへ送信するための前記ユーザターミナル内に設けられた送信手段と、
前記ユーザターミナルから前記衛星を通じて受信した前記第2信号の周波数を測定するための前記ゲートウェイ内に設けられた第2周波数測定手段と
をさらに有する請求項1に記載の位置決定システム。
【請求項6】
請求項1に記載の位置決定システムであって、前記位置決定手段は以下を具備する:
前記パラメータを含むM×1のパラメータベクトルzを生成するための手段であって、Mは決定されたパラメータの数である手段;
初期基準点を表す位置ベクトルxを生成するための手段;
xとHとの間の関係は、
【数20】
によって与えられ、前記衛星の既知の位置及び既知の速度並びに地球の形状を表す地球モデルに関する情報を含む偏導関数マトリクスHを生成するための手段;
特定のパラメータの影響を強調するためにM×Mの荷重マトリクスWを生成するための手段;
反復式、即ち、
【数21】
を実行するための手段であって、
【数22】
はそれぞれ現在の位置の推定値および次の位置の推定値であり、iは反復数を表し、前記反復式を前記
【数23】
の間の差が第1の所定の閾値を下回るまで実行する
【請求項7】
前記位置決定手段は、
地球の滑らかなモデルを
【数24】
の間の差が第2の所定の閾値を下回るまで使用し、その後、地球の詳細なデジタル地形モデルを使用する手段をさらに含む請求項6に記載の位置決定システム。
【請求項8】
前記荷重マトリクスWは測定誤差の共分散マトリクスの逆マトリクスである請求項6に記載の位置決定システム。
【請求項9】
前記位置決定手段は、
nは予め定められた数であって、地球の滑らかなモデルを最初のn回の反復に対して使用し、その後、地球の詳細なデジタル地形モデルを使用するための手段を
さらに含む請求項6に記載の位置決定システム。
【請求項10】
ユーザターミナルと、既知の位置及び既知の速度を有する少なくとも1つの衛星と、前記衛星を通じて前記ユーザターミナルと通信するためのゲートウェイとを有する通信システムにおいて、前記ユーザターミナルの位置を決定するための方法であって、
(a)前記衛星に対するレンジパラメータを決定する工程と、
(b)前記衛星に対するレンジレートパラメータを決定する工程と、
(c)前記衛星の既知の位置及び既知の速度、前記レンジパラメータ並びに前記レンジレートパラメータに基づいて、地球表面上における前記ユーザターミナルの位置を決定する工程と
を含む方法。
【請求項11】
前記レンジパラメータは前記衛星及び前記ユーザターミナル間の距離を表す請求項10に記載の方法。
【請求項12】
前記レンジパラメータは往復遅延を表し、前記工程(a)は(i)信号の往復遅延を前記ゲートウェイにおいて測定する工程を含み、前記信号は前記ゲートウェイから前記衛星を通じて前記ユーザターミナルへ送信され、かつ前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ再送信される請求項10に記載の方法。
【請求項13】
前記レンジレートパラメータは前記衛星及び前記ユーザターミナル間の相対的な半径方向速度を表す請求項10に記載の方法。
【請求項14】
前記工程(b)は、
(i)前記ゲートウェイから前記衛星を通じて受信した第1信号の周波数を前記ユーザターミナルにおいて測定する工程と、
(ii)前記第1信号の周波数測定値を前記ゲートウェイへ送信する工程と、
(iii)第2信号を前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ送信する工程と、
(iv)前記ユーザターミナルから前記衛星を通じて受信した第2信号の周波数を前記ゲートウェイにおいて測定する工程であって、前記レンジレートパラメータは前記第1信号及び第2信号の周波数測定値を表している工程と
をさらに含む請求項10に記載の方法。
【請求項15】
既知の位置及び既知の速度を有する少なくとも1つの衛星と、前記衛星を通じてユーザターミナルと通信するためのゲートウェイとを有する通信システムにおいて、
前記ゲートウェイから前記衛星を介して受信した第1の信号を再送信するための手段と、
前記ゲートウェイによって前記衛星を介して送信された第2の信号の周波数を測定するための手段と、
前記周波数の測定値を前記ゲートウェイへ送信するための手段と、
前記衛星を介して前記ゲートウェイへ第3の信号を送信するための手段と
を有するユーザターミナルであって、
地球表面上におけるユーザターミナルの位置は、前記再送信された第1の信号と、前記周波数の測定値と、前記第3の信号と、前記衛星の既知の位置及び既知の速度とに基づいて決定することが可能なユーザターミナル。
【請求項1】
衛星通信システムのための位置決定システムであって、
ユーザターミナルと、
既知の位置及び既知の速度を有する少なくとも1つの衛星と、
前記少なくとも1つの衛星を通じて前記ユーザターミナルと通信するためのゲートウェイと、
レンジパラメータを決定するためのレンジパラメータ決定手段と、
レンジレートパラメータを決定するためのレンジレートパラメータ決定手段と、
前記衛星の既知の位置及び既知の速度、前記レンジパラメータ並びに前記レンジレートパラメータに基づいて、地球表面上における前記ユーザターミナルの位置を決定するための前記ゲートウェイ内の位置決定手段と
を有する位置決定システム。
【請求項2】
前記レンジパラメータは前記衛星及び前記ユーザターミナル間の距離を表す請求項1に記載の位置決定システム。
【請求項3】
前記レンジパラメータは往復遅延を表し、前記位置決定システムは信号の往復遅延を測定するための往復遅延測定手段を前記ゲートウェイ内にさらに有し、前記信号は前記ゲートウェイから前記衛星を通じて前記ユーザターミナルへ送信され、かつ前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ再送信される請求項1に記載の位置決定システム。
【請求項4】
前記レンジレートパラメータは前記衛星及び前記ユーザターミナル間の相対的な半径方向速度を表す請求項1に記載の位置決定システム。
【請求項5】
前記レンジレートパラメータは第1信号及び第2信号の周波数測定値を表し、前記位置決定システムは、
前記ゲートウェイから前記衛星を通じて受信した前記第1信号の周波数を測定するための前記ユーザターミナル内に設けられた第1周波数測定手段と、
前記第1信号の周波数測定値を前記ゲートウェイへ送信するための前記ユーザターミナル内に設けられた送信手段と、
前記ユーザターミナルから前記衛星を通じて受信した前記第2信号の周波数を測定するための前記ゲートウェイ内に設けられた第2周波数測定手段と
をさらに有する請求項1に記載の位置決定システム。
【請求項6】
請求項1に記載の位置決定システムであって、前記位置決定手段は以下を具備する:
前記パラメータを含むM×1のパラメータベクトルzを生成するための手段であって、Mは決定されたパラメータの数である手段;
初期基準点を表す位置ベクトルxを生成するための手段;
xとHとの間の関係は、
【数20】
によって与えられ、前記衛星の既知の位置及び既知の速度並びに地球の形状を表す地球モデルに関する情報を含む偏導関数マトリクスHを生成するための手段;
特定のパラメータの影響を強調するためにM×Mの荷重マトリクスWを生成するための手段;
反復式、即ち、
【数21】
を実行するための手段であって、
【数22】
はそれぞれ現在の位置の推定値および次の位置の推定値であり、iは反復数を表し、前記反復式を前記
【数23】
の間の差が第1の所定の閾値を下回るまで実行する
【請求項7】
前記位置決定手段は、
地球の滑らかなモデルを
【数24】
の間の差が第2の所定の閾値を下回るまで使用し、その後、地球の詳細なデジタル地形モデルを使用する手段をさらに含む請求項6に記載の位置決定システム。
【請求項8】
前記荷重マトリクスWは測定誤差の共分散マトリクスの逆マトリクスである請求項6に記載の位置決定システム。
【請求項9】
前記位置決定手段は、
nは予め定められた数であって、地球の滑らかなモデルを最初のn回の反復に対して使用し、その後、地球の詳細なデジタル地形モデルを使用するための手段を
さらに含む請求項6に記載の位置決定システム。
【請求項10】
ユーザターミナルと、既知の位置及び既知の速度を有する少なくとも1つの衛星と、前記衛星を通じて前記ユーザターミナルと通信するためのゲートウェイとを有する通信システムにおいて、前記ユーザターミナルの位置を決定するための方法であって、
(a)前記衛星に対するレンジパラメータを決定する工程と、
(b)前記衛星に対するレンジレートパラメータを決定する工程と、
(c)前記衛星の既知の位置及び既知の速度、前記レンジパラメータ並びに前記レンジレートパラメータに基づいて、地球表面上における前記ユーザターミナルの位置を決定する工程と
を含む方法。
【請求項11】
前記レンジパラメータは前記衛星及び前記ユーザターミナル間の距離を表す請求項10に記載の方法。
【請求項12】
前記レンジパラメータは往復遅延を表し、前記工程(a)は(i)信号の往復遅延を前記ゲートウェイにおいて測定する工程を含み、前記信号は前記ゲートウェイから前記衛星を通じて前記ユーザターミナルへ送信され、かつ前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ再送信される請求項10に記載の方法。
【請求項13】
前記レンジレートパラメータは前記衛星及び前記ユーザターミナル間の相対的な半径方向速度を表す請求項10に記載の方法。
【請求項14】
前記工程(b)は、
(i)前記ゲートウェイから前記衛星を通じて受信した第1信号の周波数を前記ユーザターミナルにおいて測定する工程と、
(ii)前記第1信号の周波数測定値を前記ゲートウェイへ送信する工程と、
(iii)第2信号を前記ユーザターミナルから前記衛星を通じて前記ゲートウェイへ送信する工程と、
(iv)前記ユーザターミナルから前記衛星を通じて受信した第2信号の周波数を前記ゲートウェイにおいて測定する工程であって、前記レンジレートパラメータは前記第1信号及び第2信号の周波数測定値を表している工程と
をさらに含む請求項10に記載の方法。
【請求項15】
既知の位置及び既知の速度を有する少なくとも1つの衛星と、前記衛星を通じてユーザターミナルと通信するためのゲートウェイとを有する通信システムにおいて、
前記ゲートウェイから前記衛星を介して受信した第1の信号を再送信するための手段と、
前記ゲートウェイによって前記衛星を介して送信された第2の信号の周波数を測定するための手段と、
前記周波数の測定値を前記ゲートウェイへ送信するための手段と、
前記衛星を介して前記ゲートウェイへ第3の信号を送信するための手段と
を有するユーザターミナルであって、
地球表面上におけるユーザターミナルの位置は、前記再送信された第1の信号と、前記周波数の測定値と、前記第3の信号と、前記衛星の既知の位置及び既知の速度とに基づいて決定することが可能なユーザターミナル。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【公開番号】特開2009−244274(P2009−244274A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−161400(P2009−161400)
【出願日】平成21年7月8日(2009.7.8)
【分割の表示】特願2008−14099(P2008−14099)の分割
【原出願日】平成9年9月26日(1997.9.26)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2009−161400(P2009−161400)
【出願日】平成21年7月8日(2009.7.8)
【分割の表示】特願2008−14099(P2008−14099)の分割
【原出願日】平成9年9月26日(1997.9.26)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]