
三次元リアルタイムMR画像誘導下手術システム
【課題】三次元リアルタイムMR画像のモニタリング下で、マイクロ波デバイスの操作を容易に可能とする手術システムの提供である。
【解決手段】全てのシステム情報を統合するMRI装置内外に設置される情報処理装置であるメインワークステーションと、MRI装置に組み込まれた又は連結した情報処理装置であるMRワークステーションと、計測しておいた手術野空間の磁場情報をもとに、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送る磁気トラッキング、並びに/又は光による位置の特定を可能とする光学式位置センサーと、手術用デバイスとしての軟性導体内視鏡を、構成要素とすることで、本発明の課題を解決できることを見出し、本発明を完成した。
【解決手段】全てのシステム情報を統合するMRI装置内外に設置される情報処理装置であるメインワークステーションと、MRI装置に組み込まれた又は連結した情報処理装置であるMRワークステーションと、計測しておいた手術野空間の磁場情報をもとに、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送る磁気トラッキング、並びに/又は光による位置の特定を可能とする光学式位置センサーと、手術用デバイスとしての軟性導体内視鏡を、構成要素とすることで、本発明の課題を解決できることを見出し、本発明を完成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三次元リアルタイムMR画像誘導下において、軟性内視鏡様導体(軟性導体)を介したマイクロ波デバイスによる手術を可能とする手術システムに関する。
【背景技術】
【0002】
これからの医療では、患者への負担を軽減するため、被曝の危険性がある放射性物質や放射線を使用しない画像検査モニターが必須となる。
また、患者への負担を軽減するため、無侵襲画像診断や低侵襲治療が求められ、患者の体内構造の透視、化学物質及び生化学的な情報の可視化はますます必要性が増してくる。MR画像法は、上記要求に加え、遺伝子発現の画像化、移植細胞、ES細胞が体内の標的に向かって移動することを追跡し、また該標的を正確に誘導することもできる。
【0003】
一般的に従来、円筒形ボア(クローズドボア)のMR画像装置は画像診断にのみに使われ、術中にMR画像を撮像する事は無かった。MR画像法はX線CTに匹敵する画像解像度を持ちながら、放射線被曝の心配がない利点を持ち合わせている。さらに、近年オープンMRI装置として画像支援下で手術的操作が可能な装置も開発された。
しかし、MR高磁場下では手術器具から麻酔器、治療器具にいたるまで非磁性化しなければならない。さらに、MR画像法は高周波の電磁波を用いて撮像するため、特別なエネルギーを用いた手術機器や道具を備えなければならない。
全国で既に一万数千台導入されている円筒形型MR画像装置は内径60cm、長さ200cm程度であり、ボア内では患者の体が占める領域を除くと極めて限られたスペースしか残されていない。従って、先進的な臨床研究施設でも患者を操作毎に装置から出したり入れたりするpit in、pit outする手術システムが採用臨床導入されている程度である。
【0004】
MRI装置内で唯一使えるマイクロ波を利用したデバイスは、現在まで、凝固用穿刺針型のプローベしかない。さらにMR対応の内視鏡も開発はされているが、内視鏡先端部にRFコイルを装着置してMR画像を撮ることに主眼が置かれており、内視鏡として強磁場下で使用可能のみだけで、手術操作に適した内視鏡システムは未だ開発されていない。内視鏡の位置や方向を確認することができず、内視鏡を介して使用する専用のデバイスも無い。
内視鏡先端部にRFコイルを装着置してMR画像を撮ることに主眼が置かれており、手術操作に適した内視鏡システムは未だ開発されていない。
MR強磁場下での位置センシングを内視鏡や手術支援デバイスに搭載したデバイス装置モニター化技術も実用化されていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】WO2008/150328
【特許文献2】日本国特許第4035100号
【特許文献3】特開2008−167793
【特許文献4】特開2009−409
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、三次元リアルタイムMR画像のモニタリング下で、マイクロ波デバイスの操作を容易に可能とする手術システムの提供である。
つまり、リアルタイムに生体の内部状況とデバイスの位置、方向をMR画像によって確認し、処置する生体や臓器内構造を正確に確認しながら手術処置できるシステムを提供することである。
【課題を解決するための手段】
【0007】
本発明者等は、上記課題を解決するために鋭意研究を重ねた結果、全てのシステム情報を統合するMRI装置内外に設置される情報処理装置であるメインワークステーションと、MRI装置に組み込まれた又は連結した情報処理装置であるMRワークステーションと、計測しておいた手術野空間の磁場情報をもとに、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送る(手術野空間の磁場情報から位置と方向を計測する)磁気トラッキング並びに/又は光による位置の特定を可能とする光学式位置センサーと、軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと、手術用デバイスとしての軟性導体内視鏡を、構成要素とすることで、本発明の課題を解決できることを見出し、本発明を完成した。
【0008】
すなわち本発明のシステムにおいては、各構成要素は、以下のように作動する。
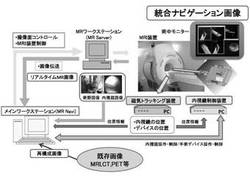
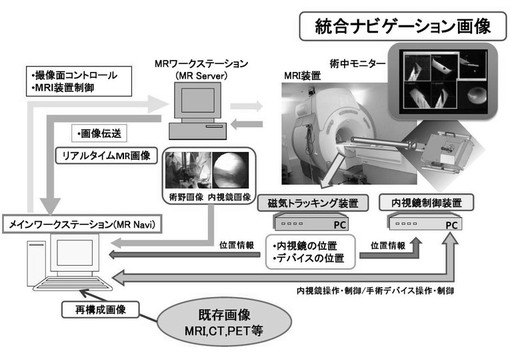
(1)メインワークステーションはMRワークステーションを制御してMRI装置の画像情報を取り込む。
(2)磁気トラッキング装置は、前もって計測しておいた手術野空間の磁場情報を基に、内視鏡デバイスの位置情報をメインワークステーションに送る。
(3)内視鏡画像及び位置情報もメインワークステーションに取り込まれる。
以上の情報をメインワークステーションで統合して統合ナビゲーション画像とする。内視鏡マニピュレーター又はロボットを設置した場合(制御装置)は、メインワークステーションからの位置情報と全ての画像情報が制御装置に情報として送られ、制御装置には手術操作に必要な画像情報が取り込まれる。なお、遠隔操作の場合はワークステーションが制御台となる。
(4)軟性内視鏡様導体先端部に位置センサーを装着して、軟性導体先端部の位置や方向情報をメインワークステーションに送り、位置や方向の連続モニターを行う。
【0009】
かくして、本願発明は以下の構成からなる:
三次元リアルタイムMR画像下での手術システムであって;
MRI装置と;
MRI装置及び撮像面を制御し、MRI装置からのMR画像を連続的に伝送することにより、リアルタイムMR画像をメインワークステーションに伝送するMRワークステーションと;
軟性導体内視鏡の位置及び/又はマイクロ波デバイスの位置を特定し、該位置画像をメインワークステーションに伝送する磁気トラッキング装置及び/又は光学式の位置センサー装置と;
軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと;
予め取得した生体内画像、該リアルタイムMR画像、並びに/又は該軟性導体内視鏡の位置及び/若しくはマイクロ波デバイスの位置画像を統合可能なメインワークステーションと、を有し、
術者がリアルタイムに生体の内部状況とデバイスの位置を画像によって確認し、処置する生体物及びデバイスの位置変化を確認しながら手術できる手術システム。
【発明の効果】
【0010】
本発明の手術システムは、リアルタイムに生体の内部状況とデバイスの位置を画像によって確認でき、手術処理する組織の構造を確認しながら処置できる安全な手術が提供できる。また被曝が無く患者にも術者にも安全な手術システムを提供する。
また、本発明の手術システムで使用する手術用デバイスとしてのマイクロ波デバイスは、MR画像を干渉することがない。
さらに、本発明は、マイクロ波デバイスとしてMR対応の軟性導体内視鏡を用いれば一般的に使われている円筒形(クローズドボア型)及びハンバーガー状のMRI装置においても、容易に手術操作が可能となる。
加えて、本発明は、画像ソフトにより術前に撮った画像を基に、術中再構成して3Dリアルタイム画像としてモニターを可能とする。
以上の結果として、本発明の手術システムでは、直視下、軟性導体内視鏡画像(表面画像情報)に3D-MR画像(深部情報)と物理化学、代謝変化の可視可像、更にこれら全体の位置情報を融合したリアルタイム画像情報を術者に提供できる。
本発明の手術システムでは、臨床撮像用のどのようなMRI装置を使用しても、生体内構造、並びに軟性導体内視鏡及びマイクロ波デバイスの位置情報をリアルタイムに術者に提供できるシステムである。
【図面の簡単な説明】
【0011】
【図1】本発明の手術システムの全体を示す図である。
【図2】総合MRナビゲーションシステムを示す図である。
【発明を実施するための形態】
【0012】
(MRI装置)
MRI装置は、既知、既存の装置がそのまま応用可能である。本発明の手術システムの特徴の一つとして、臨床撮像用のどのようなMRI装置を使用しても、生体内構造、並びに軟性導体内視鏡及びマイクロ波デバイスの位置情報をリアルタイムに術者に提供できる。
【0013】
(軟性導体内視鏡様導体)
軟性内視鏡様導体(軟性導体)とは、軟性内視鏡の発展型であり、好ましい最小限屈曲動作機能、画像形成機能(ファイバー等)操作用鉗子通過機能を備える。
縦型のオープンMRI装置では、術者が立ったまま手術操作が可能となる。しかし、一般的なMRI装置では患者の体は狭い円筒形のボア内にあり、術者が近づいて手術することは困難である。この問題を解決するために長い手術支援の手(内視鏡)が必要となる。一般的に軟性内視鏡の挿入部は、自在にわん曲可能で、かつ、引っ張り、圧縮、ねじれ等に対する強度を必要とされ、可能な限り細くする必要がある。そのため内視鏡の金属部品の多くがステンレス性で磁界を乱し、MR下の使用には適さない。MRIの磁場に影響を与えない材料は機械的強度が小さいため、従来必要とされる性能を維持することが出来ない。また、手術を行う軟性導体とするため、大きい鉗子孔が必要となる。
上記問題を解決する為に、好ましくは、下記構造および材料を使った軟性内視鏡の挿入部を使う。
(1)樹脂製の内管と、この内管を覆う三重螺旋管と、この三重螺旋管を覆う樹脂製の外管から構成され、隣り合う螺旋管をそれぞれ逆巻きに配置している。
(2)樹脂製の内管には、十分な引っ張り強度および圧縮強度を持ち、非磁性体であるポリエチレン管を使用し、三重螺旋管には、MRIの磁場を殆ど乱さない程度に磁化率(透滋率)が低いリン青銅を材料とした螺旋管を使用している。
(3)2.8mm径の鉗子孔を作成、直線的に挿入可能としている。このような改良により、従来の軟性内視鏡の挿入部と同程度のわん曲性や引っ張り、圧縮、ねじれ等に対する強度を持ち、また十分に細径で、かつMRI下で実像と図様の写真像を結ぶMR画像下で使用可能な軟性内視鏡を提供することが出来る。
軟性内視鏡の位置センシングは、硬性の場合と異なり、手元だけのオープンループ制御はできなかった。しかし先端に可変性で小型のセンサーを設置できたことにより、先端の動きをトレースして生体内での動きや位置を確認できることに成功した(クローズドループ制御)。
以上により、手の届かない狭いクローズドボアタイプや水平型のオープンMRI装置においても離れた場所から可驍性導体(軟性導体内視鏡)を通してマグネットセンターに位置する体内治療対象部位の撮像を行いながらの手術操作が可能となる。
さらに内視鏡を通した画像と軟性導体内視鏡の位置を示す三次元のMR画像の支援により、直視下と同様か、より精度の高い安全な手術が可能となる。
【0014】
(マイクロ波デバイス)
手術器具として、非磁性の道具に加え、好ましくは、MR画像を干渉しないマイクロ波を用いたエネルギーデバイス(例えば日本国特許第4035100号他)が好ましい。マイクロ波デバイスは極めて強いシーリング力を持ち、大概の脈管をシールしながら出血せずに切ることができる。強磁場下でのMR画像によるリアルタイムモニターも可能とする。デバイスは摂子やエネルギーデバイスなどを供給可能であり、3DリアルタイムMR画像情報を得て直視下手術で使っても極めて安全な手術が達成できる。軟性導体内視鏡を通して使う内視鏡用鉗子についても同様である。この場合、軟性導体内視鏡の位置をセンシングして、MR画像により生体内の空間位置を知りながら内視鏡画像と合わせ、極めて位置精度の高い手術操作を可能とする。
【0015】
(画像ソフト)
メインワークステーションにおいて、再構成画像とリアルタイムMR画像と軟性導体内視鏡・マイクロ波デバイスの位置関係の視覚化のために、統合画像ソフトを使用する。
この場合、例えば特許文献「特開2008−167793」が開示する画像ソフトでは、縦型オープンMRI装置の術前3Dデータをリアルタイム画像と組み合わせ、デバイス位置のリアルタイム情報として、三次元画像とともにモニターにして手術支援に用いる画像ナビゲーションを可能とする。この場合の3次元とは生体や臓器表面の立体化だけでなく、内部構造を透視状態でみられる(深部情報)立体化である。
これにより、MR画像を身体のどの位置においても立体的にリアルタイムモニター画像として使うことができる。現在臨床応用されているpit in、pit outのごとく一旦撮像したものを手術の進行に合わせて何度も撮り直し、手術を繰り返すシステムでは、治療具位置のリアルタイム情報の観察や、変形、位置ずれなどには対応できないが、本発明のシステムではこれらの問題を解決することができる。
画像ソフトは、肉眼による表面情報と、MRによる深部情報と化学、物理、代謝変化可視可画像に加え、デバイスの空間位置を同時に提供する。
【0016】
(位置センサー)
MR強磁場下での位置のセンシングについては、光学方式や傾斜磁場を利用した方式がある。例えば後者の場合、特許文献「特開2009−409」を参照することができる。該特許文献は、「センサーを複数個使った場合、デバイスの位置センシング精度を更に上げることができ、または複数のデバイス各々の位置センシングが可能となる」ことを可能とする。なお、位置センシングはMR撮像のための傾斜磁場を用いた技術である。
このセンサーを手術支援デバイス又は軟性導体内視鏡に搭載し、磁気トラッキング装置によって、軟性導体内視鏡の位置・デバイスの位置情報を得て、メインワークステーションの画像統合制御ソフトに統合することで、強磁場内の空間位置がリアルタイムに確認できると共に、その位置を中心としたMRの撮像が可能となる。また、高周波位置センシングも利用可能である。
マイクロ波デバイスとして、例えば、ハサミ様鉗子凝固切断器を先端に付けることで、ハサミが切ろうとする生体内構造を切る直前に確認することが可能となる。
【0017】
(軟性導体内視鏡制御装置)
手術の際には、術者により軟性導体内視鏡及び/又は鉗子が操作される。この時、標的臓器または腫瘍の位置情報をモニター上で確認しながら手術が進められる。位置センサーによる位置情報と画像データによる軟性導体内視鏡および鉗子等のデバイスの情報が連動し、軟性導体内視鏡の制御・操作及び/又は手術デバイスの制御・操作のための制御ワークステーションを設け、さらに該制御・操作に関する情報をメインワークステーション上に統合する。
【0018】
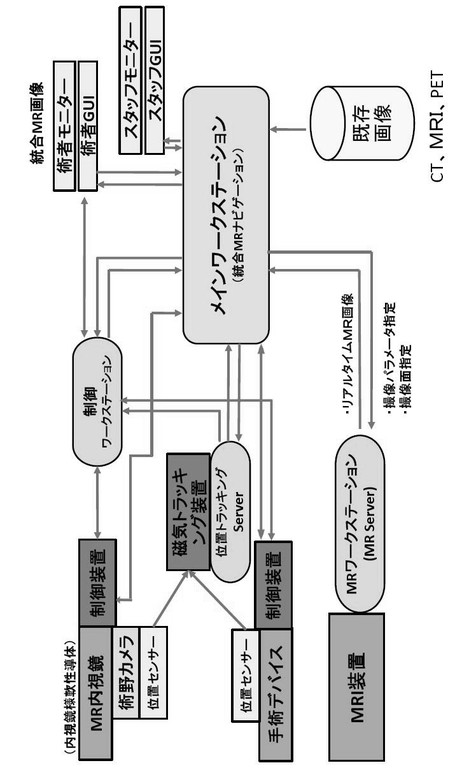
(総合MRナビゲーションシステム)
総合MRナビゲーションシステムは図2に要約する。しかしながら、図2に記載の各要素をすべて備える又は統合する必要がなく、さらには別の要素を追加することも可能である。詳細は、以下の通りである。
(1)メインワークステーションは、術者モニター(術者GUI)、スタッフモニター(スタッフGUI)、制御ワークステーション、MRワークステーション、位置トラッキング、内視鏡様軟体導体の制御装置、手術デバイスの制御装置と連動している。さらに、すでに撮影した既存画像(CT、MRI、PET)も取り込むことも可能である。
(2)制御ワークステーションは、軟性導体内視鏡の制御・操作及び/又は手術デバイスの制御・操作のために、内視鏡様軟体導体の制御装置、位置トラッキング、手術デバイスの制御装置、術者モニター(術者GUI)と連動している。
(3)磁気トラッキング装置は、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送るために、各位置センサーと連動している。
【0019】
(システムの統合)
上記要素技術を統合することにより、一般的な円筒形MRI装置でMR対応軟性導体内視鏡を使い、縦型オープンMRI装置と同様、リアルタイム三次元MR画像をモニターした鏡視下手術を可能とする。術者は、肉眼視と内視鏡像に加え、3D-リアルタイムMR画像による生体内構造とデバイスの位置を情報として提供される。
従って、臓器や生体内構造が手術操作をする前に常時確認できる。また一連の操作をデジタル情報として保存することにより、将来操作情報の蓄積により手術操作の安定化や、デバイスフィードバックに寄与することもできる。
【実施例】
【0020】
(実施例1)
本発明の手術システムは、MRI装置として垂直型オープンMR(Signa/Spi)を用いれば、腹部、頭部、会陰部手術は開創した創を通して直視下(肉眼視)に手術を可能とする。
この場合、手術道具は全て非磁性であり、好適にはマイクロ波によるエネルギーデバイスを用いることで、画像を干渉することなく手術ができる。例えば、内視鏡・手術デバイスの先端又はハサミ型のマイクロ波凝固切開メスの先端には、傾斜磁場を利用した位置センサー(Endoscout)を設置し、GEヘルスケアのSigna/SpiのもとでSigna/Spiの画像制御ソフトと連携したSissaro-scope(画像ソフト)を用いることで、開腹した実質臓器の切断時(肝臓の場合)に、肝内の門脈や肝静脈などの血管構築を切断する前に確認しながら切除することが可能となる。
好ましくは、術者は、「前もって撮像した画像をもとに、メインワークステーションに術中の画像を再構成して得られた三次元リアルタイム画像」を確認しながら、内視鏡・手術デバイスの操作・制御を実視できる。これにより、必要不可欠、最小限の切除域を、切る直前に、メインワークステーションにおける画像を確認しながら特定できる。
以上により、本発明の手術システムは、従来にない、正確、確実、安全な手術が実現できる。
【0021】
(実施例2)
本発明の手術システムは、術者が患者の傍に立って直視下手術ができないタイプのMRI装置{例えば、最も普及しているボア型のMR装置や水平型(ハンバーガー型)}を用いるれば、術野が深い場所にあり、術者の手が十分届かない場合がある。
この場合、MR対応軟性導体内視鏡と内視鏡用のマイクロ波鉗子を用い、腔内または消化管や生殖器内に軟性導体内視鏡を挿入し、腹腔内であれば気腹し、軟性導体内視鏡画像を確認しながらシーリング力の強いマイクロ波鉗子で穿刺凝固または凝固、切開手術を進めることができる。
加えて、3DリアルタイムMR画像にて、軟性導体内視鏡の生体内位置をメインワークステーションの画面にて確認しながら手術ができ、無用な機械同士と腹腔内臓器の接触を避けることができる。手術機器の位置確認が可能であり、さらに軟性導体内視鏡下に直接術野が見え、デバイスの先端部分の生体内位置と共に隣接内部構造もMR画像として同時に確認できる。
加えて、実施例1で示したように、本発明のシステムでは、臓器の内部構造も切る前に確認できる。すなわち、本発明のシステムは、空間が狭くかつ十分な視野が無いMRI装置内でも実施可能である。
【0022】
(実施例3)
本発明の手術システムにおいて、実施例2の別の態様として、硬性の内視鏡(腹腔鏡や胸腔鏡)を使用する腹腔鏡手術もすることもできる。
腹腔鏡の先端に位置センサーを付けることで実施例2と同様の手術が可能となる。さらに複数本の内視鏡に位置のセンサーを付けた場合、それぞれの位置を相互に確認しあうことにより、より正確な位置確認や画像情報の統合もが可能となる。
【産業上の利用可能性】
【0023】
本発明は、リアルタイムに生体の内部状況とデバイスの位置を画像によって確認でき、被曝が無い安全な手術システムを提供する。
【技術分野】
【0001】
本発明は、三次元リアルタイムMR画像誘導下において、軟性内視鏡様導体(軟性導体)を介したマイクロ波デバイスによる手術を可能とする手術システムに関する。
【背景技術】
【0002】
これからの医療では、患者への負担を軽減するため、被曝の危険性がある放射性物質や放射線を使用しない画像検査モニターが必須となる。
また、患者への負担を軽減するため、無侵襲画像診断や低侵襲治療が求められ、患者の体内構造の透視、化学物質及び生化学的な情報の可視化はますます必要性が増してくる。MR画像法は、上記要求に加え、遺伝子発現の画像化、移植細胞、ES細胞が体内の標的に向かって移動することを追跡し、また該標的を正確に誘導することもできる。
【0003】
一般的に従来、円筒形ボア(クローズドボア)のMR画像装置は画像診断にのみに使われ、術中にMR画像を撮像する事は無かった。MR画像法はX線CTに匹敵する画像解像度を持ちながら、放射線被曝の心配がない利点を持ち合わせている。さらに、近年オープンMRI装置として画像支援下で手術的操作が可能な装置も開発された。
しかし、MR高磁場下では手術器具から麻酔器、治療器具にいたるまで非磁性化しなければならない。さらに、MR画像法は高周波の電磁波を用いて撮像するため、特別なエネルギーを用いた手術機器や道具を備えなければならない。
全国で既に一万数千台導入されている円筒形型MR画像装置は内径60cm、長さ200cm程度であり、ボア内では患者の体が占める領域を除くと極めて限られたスペースしか残されていない。従って、先進的な臨床研究施設でも患者を操作毎に装置から出したり入れたりするpit in、pit outする手術システムが採用臨床導入されている程度である。
【0004】
MRI装置内で唯一使えるマイクロ波を利用したデバイスは、現在まで、凝固用穿刺針型のプローベしかない。さらにMR対応の内視鏡も開発はされているが、内視鏡先端部にRFコイルを装着置してMR画像を撮ることに主眼が置かれており、内視鏡として強磁場下で使用可能のみだけで、手術操作に適した内視鏡システムは未だ開発されていない。内視鏡の位置や方向を確認することができず、内視鏡を介して使用する専用のデバイスも無い。
内視鏡先端部にRFコイルを装着置してMR画像を撮ることに主眼が置かれており、手術操作に適した内視鏡システムは未だ開発されていない。
MR強磁場下での位置センシングを内視鏡や手術支援デバイスに搭載したデバイス装置モニター化技術も実用化されていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】WO2008/150328
【特許文献2】日本国特許第4035100号
【特許文献3】特開2008−167793
【特許文献4】特開2009−409
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、三次元リアルタイムMR画像のモニタリング下で、マイクロ波デバイスの操作を容易に可能とする手術システムの提供である。
つまり、リアルタイムに生体の内部状況とデバイスの位置、方向をMR画像によって確認し、処置する生体や臓器内構造を正確に確認しながら手術処置できるシステムを提供することである。
【課題を解決するための手段】
【0007】
本発明者等は、上記課題を解決するために鋭意研究を重ねた結果、全てのシステム情報を統合するMRI装置内外に設置される情報処理装置であるメインワークステーションと、MRI装置に組み込まれた又は連結した情報処理装置であるMRワークステーションと、計測しておいた手術野空間の磁場情報をもとに、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送る(手術野空間の磁場情報から位置と方向を計測する)磁気トラッキング並びに/又は光による位置の特定を可能とする光学式位置センサーと、軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと、手術用デバイスとしての軟性導体内視鏡を、構成要素とすることで、本発明の課題を解決できることを見出し、本発明を完成した。
【0008】
すなわち本発明のシステムにおいては、各構成要素は、以下のように作動する。
(1)メインワークステーションはMRワークステーションを制御してMRI装置の画像情報を取り込む。
(2)磁気トラッキング装置は、前もって計測しておいた手術野空間の磁場情報を基に、内視鏡デバイスの位置情報をメインワークステーションに送る。
(3)内視鏡画像及び位置情報もメインワークステーションに取り込まれる。
以上の情報をメインワークステーションで統合して統合ナビゲーション画像とする。内視鏡マニピュレーター又はロボットを設置した場合(制御装置)は、メインワークステーションからの位置情報と全ての画像情報が制御装置に情報として送られ、制御装置には手術操作に必要な画像情報が取り込まれる。なお、遠隔操作の場合はワークステーションが制御台となる。
(4)軟性内視鏡様導体先端部に位置センサーを装着して、軟性導体先端部の位置や方向情報をメインワークステーションに送り、位置や方向の連続モニターを行う。
【0009】
かくして、本願発明は以下の構成からなる:
三次元リアルタイムMR画像下での手術システムであって;
MRI装置と;
MRI装置及び撮像面を制御し、MRI装置からのMR画像を連続的に伝送することにより、リアルタイムMR画像をメインワークステーションに伝送するMRワークステーションと;
軟性導体内視鏡の位置及び/又はマイクロ波デバイスの位置を特定し、該位置画像をメインワークステーションに伝送する磁気トラッキング装置及び/又は光学式の位置センサー装置と;
軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと;
予め取得した生体内画像、該リアルタイムMR画像、並びに/又は該軟性導体内視鏡の位置及び/若しくはマイクロ波デバイスの位置画像を統合可能なメインワークステーションと、を有し、
術者がリアルタイムに生体の内部状況とデバイスの位置を画像によって確認し、処置する生体物及びデバイスの位置変化を確認しながら手術できる手術システム。
【発明の効果】
【0010】
本発明の手術システムは、リアルタイムに生体の内部状況とデバイスの位置を画像によって確認でき、手術処理する組織の構造を確認しながら処置できる安全な手術が提供できる。また被曝が無く患者にも術者にも安全な手術システムを提供する。
また、本発明の手術システムで使用する手術用デバイスとしてのマイクロ波デバイスは、MR画像を干渉することがない。
さらに、本発明は、マイクロ波デバイスとしてMR対応の軟性導体内視鏡を用いれば一般的に使われている円筒形(クローズドボア型)及びハンバーガー状のMRI装置においても、容易に手術操作が可能となる。
加えて、本発明は、画像ソフトにより術前に撮った画像を基に、術中再構成して3Dリアルタイム画像としてモニターを可能とする。
以上の結果として、本発明の手術システムでは、直視下、軟性導体内視鏡画像(表面画像情報)に3D-MR画像(深部情報)と物理化学、代謝変化の可視可像、更にこれら全体の位置情報を融合したリアルタイム画像情報を術者に提供できる。
本発明の手術システムでは、臨床撮像用のどのようなMRI装置を使用しても、生体内構造、並びに軟性導体内視鏡及びマイクロ波デバイスの位置情報をリアルタイムに術者に提供できるシステムである。
【図面の簡単な説明】
【0011】
【図1】本発明の手術システムの全体を示す図である。
【図2】総合MRナビゲーションシステムを示す図である。
【発明を実施するための形態】
【0012】
(MRI装置)
MRI装置は、既知、既存の装置がそのまま応用可能である。本発明の手術システムの特徴の一つとして、臨床撮像用のどのようなMRI装置を使用しても、生体内構造、並びに軟性導体内視鏡及びマイクロ波デバイスの位置情報をリアルタイムに術者に提供できる。
【0013】
(軟性導体内視鏡様導体)
軟性内視鏡様導体(軟性導体)とは、軟性内視鏡の発展型であり、好ましい最小限屈曲動作機能、画像形成機能(ファイバー等)操作用鉗子通過機能を備える。
縦型のオープンMRI装置では、術者が立ったまま手術操作が可能となる。しかし、一般的なMRI装置では患者の体は狭い円筒形のボア内にあり、術者が近づいて手術することは困難である。この問題を解決するために長い手術支援の手(内視鏡)が必要となる。一般的に軟性内視鏡の挿入部は、自在にわん曲可能で、かつ、引っ張り、圧縮、ねじれ等に対する強度を必要とされ、可能な限り細くする必要がある。そのため内視鏡の金属部品の多くがステンレス性で磁界を乱し、MR下の使用には適さない。MRIの磁場に影響を与えない材料は機械的強度が小さいため、従来必要とされる性能を維持することが出来ない。また、手術を行う軟性導体とするため、大きい鉗子孔が必要となる。
上記問題を解決する為に、好ましくは、下記構造および材料を使った軟性内視鏡の挿入部を使う。
(1)樹脂製の内管と、この内管を覆う三重螺旋管と、この三重螺旋管を覆う樹脂製の外管から構成され、隣り合う螺旋管をそれぞれ逆巻きに配置している。
(2)樹脂製の内管には、十分な引っ張り強度および圧縮強度を持ち、非磁性体であるポリエチレン管を使用し、三重螺旋管には、MRIの磁場を殆ど乱さない程度に磁化率(透滋率)が低いリン青銅を材料とした螺旋管を使用している。
(3)2.8mm径の鉗子孔を作成、直線的に挿入可能としている。このような改良により、従来の軟性内視鏡の挿入部と同程度のわん曲性や引っ張り、圧縮、ねじれ等に対する強度を持ち、また十分に細径で、かつMRI下で実像と図様の写真像を結ぶMR画像下で使用可能な軟性内視鏡を提供することが出来る。
軟性内視鏡の位置センシングは、硬性の場合と異なり、手元だけのオープンループ制御はできなかった。しかし先端に可変性で小型のセンサーを設置できたことにより、先端の動きをトレースして生体内での動きや位置を確認できることに成功した(クローズドループ制御)。
以上により、手の届かない狭いクローズドボアタイプや水平型のオープンMRI装置においても離れた場所から可驍性導体(軟性導体内視鏡)を通してマグネットセンターに位置する体内治療対象部位の撮像を行いながらの手術操作が可能となる。
さらに内視鏡を通した画像と軟性導体内視鏡の位置を示す三次元のMR画像の支援により、直視下と同様か、より精度の高い安全な手術が可能となる。
【0014】
(マイクロ波デバイス)
手術器具として、非磁性の道具に加え、好ましくは、MR画像を干渉しないマイクロ波を用いたエネルギーデバイス(例えば日本国特許第4035100号他)が好ましい。マイクロ波デバイスは極めて強いシーリング力を持ち、大概の脈管をシールしながら出血せずに切ることができる。強磁場下でのMR画像によるリアルタイムモニターも可能とする。デバイスは摂子やエネルギーデバイスなどを供給可能であり、3DリアルタイムMR画像情報を得て直視下手術で使っても極めて安全な手術が達成できる。軟性導体内視鏡を通して使う内視鏡用鉗子についても同様である。この場合、軟性導体内視鏡の位置をセンシングして、MR画像により生体内の空間位置を知りながら内視鏡画像と合わせ、極めて位置精度の高い手術操作を可能とする。
【0015】
(画像ソフト)
メインワークステーションにおいて、再構成画像とリアルタイムMR画像と軟性導体内視鏡・マイクロ波デバイスの位置関係の視覚化のために、統合画像ソフトを使用する。
この場合、例えば特許文献「特開2008−167793」が開示する画像ソフトでは、縦型オープンMRI装置の術前3Dデータをリアルタイム画像と組み合わせ、デバイス位置のリアルタイム情報として、三次元画像とともにモニターにして手術支援に用いる画像ナビゲーションを可能とする。この場合の3次元とは生体や臓器表面の立体化だけでなく、内部構造を透視状態でみられる(深部情報)立体化である。
これにより、MR画像を身体のどの位置においても立体的にリアルタイムモニター画像として使うことができる。現在臨床応用されているpit in、pit outのごとく一旦撮像したものを手術の進行に合わせて何度も撮り直し、手術を繰り返すシステムでは、治療具位置のリアルタイム情報の観察や、変形、位置ずれなどには対応できないが、本発明のシステムではこれらの問題を解決することができる。
画像ソフトは、肉眼による表面情報と、MRによる深部情報と化学、物理、代謝変化可視可画像に加え、デバイスの空間位置を同時に提供する。
【0016】
(位置センサー)
MR強磁場下での位置のセンシングについては、光学方式や傾斜磁場を利用した方式がある。例えば後者の場合、特許文献「特開2009−409」を参照することができる。該特許文献は、「センサーを複数個使った場合、デバイスの位置センシング精度を更に上げることができ、または複数のデバイス各々の位置センシングが可能となる」ことを可能とする。なお、位置センシングはMR撮像のための傾斜磁場を用いた技術である。
このセンサーを手術支援デバイス又は軟性導体内視鏡に搭載し、磁気トラッキング装置によって、軟性導体内視鏡の位置・デバイスの位置情報を得て、メインワークステーションの画像統合制御ソフトに統合することで、強磁場内の空間位置がリアルタイムに確認できると共に、その位置を中心としたMRの撮像が可能となる。また、高周波位置センシングも利用可能である。
マイクロ波デバイスとして、例えば、ハサミ様鉗子凝固切断器を先端に付けることで、ハサミが切ろうとする生体内構造を切る直前に確認することが可能となる。
【0017】
(軟性導体内視鏡制御装置)
手術の際には、術者により軟性導体内視鏡及び/又は鉗子が操作される。この時、標的臓器または腫瘍の位置情報をモニター上で確認しながら手術が進められる。位置センサーによる位置情報と画像データによる軟性導体内視鏡および鉗子等のデバイスの情報が連動し、軟性導体内視鏡の制御・操作及び/又は手術デバイスの制御・操作のための制御ワークステーションを設け、さらに該制御・操作に関する情報をメインワークステーション上に統合する。
【0018】
(総合MRナビゲーションシステム)
総合MRナビゲーションシステムは図2に要約する。しかしながら、図2に記載の各要素をすべて備える又は統合する必要がなく、さらには別の要素を追加することも可能である。詳細は、以下の通りである。
(1)メインワークステーションは、術者モニター(術者GUI)、スタッフモニター(スタッフGUI)、制御ワークステーション、MRワークステーション、位置トラッキング、内視鏡様軟体導体の制御装置、手術デバイスの制御装置と連動している。さらに、すでに撮影した既存画像(CT、MRI、PET)も取り込むことも可能である。
(2)制御ワークステーションは、軟性導体内視鏡の制御・操作及び/又は手術デバイスの制御・操作のために、内視鏡様軟体導体の制御装置、位置トラッキング、手術デバイスの制御装置、術者モニター(術者GUI)と連動している。
(3)磁気トラッキング装置は、内視鏡軟性導体及び/若しくは軟性導体内視鏡デバイスの位置情報をメインワークステーションに送るために、各位置センサーと連動している。
【0019】
(システムの統合)
上記要素技術を統合することにより、一般的な円筒形MRI装置でMR対応軟性導体内視鏡を使い、縦型オープンMRI装置と同様、リアルタイム三次元MR画像をモニターした鏡視下手術を可能とする。術者は、肉眼視と内視鏡像に加え、3D-リアルタイムMR画像による生体内構造とデバイスの位置を情報として提供される。
従って、臓器や生体内構造が手術操作をする前に常時確認できる。また一連の操作をデジタル情報として保存することにより、将来操作情報の蓄積により手術操作の安定化や、デバイスフィードバックに寄与することもできる。
【実施例】
【0020】
(実施例1)
本発明の手術システムは、MRI装置として垂直型オープンMR(Signa/Spi)を用いれば、腹部、頭部、会陰部手術は開創した創を通して直視下(肉眼視)に手術を可能とする。
この場合、手術道具は全て非磁性であり、好適にはマイクロ波によるエネルギーデバイスを用いることで、画像を干渉することなく手術ができる。例えば、内視鏡・手術デバイスの先端又はハサミ型のマイクロ波凝固切開メスの先端には、傾斜磁場を利用した位置センサー(Endoscout)を設置し、GEヘルスケアのSigna/SpiのもとでSigna/Spiの画像制御ソフトと連携したSissaro-scope(画像ソフト)を用いることで、開腹した実質臓器の切断時(肝臓の場合)に、肝内の門脈や肝静脈などの血管構築を切断する前に確認しながら切除することが可能となる。
好ましくは、術者は、「前もって撮像した画像をもとに、メインワークステーションに術中の画像を再構成して得られた三次元リアルタイム画像」を確認しながら、内視鏡・手術デバイスの操作・制御を実視できる。これにより、必要不可欠、最小限の切除域を、切る直前に、メインワークステーションにおける画像を確認しながら特定できる。
以上により、本発明の手術システムは、従来にない、正確、確実、安全な手術が実現できる。
【0021】
(実施例2)
本発明の手術システムは、術者が患者の傍に立って直視下手術ができないタイプのMRI装置{例えば、最も普及しているボア型のMR装置や水平型(ハンバーガー型)}を用いるれば、術野が深い場所にあり、術者の手が十分届かない場合がある。
この場合、MR対応軟性導体内視鏡と内視鏡用のマイクロ波鉗子を用い、腔内または消化管や生殖器内に軟性導体内視鏡を挿入し、腹腔内であれば気腹し、軟性導体内視鏡画像を確認しながらシーリング力の強いマイクロ波鉗子で穿刺凝固または凝固、切開手術を進めることができる。
加えて、3DリアルタイムMR画像にて、軟性導体内視鏡の生体内位置をメインワークステーションの画面にて確認しながら手術ができ、無用な機械同士と腹腔内臓器の接触を避けることができる。手術機器の位置確認が可能であり、さらに軟性導体内視鏡下に直接術野が見え、デバイスの先端部分の生体内位置と共に隣接内部構造もMR画像として同時に確認できる。
加えて、実施例1で示したように、本発明のシステムでは、臓器の内部構造も切る前に確認できる。すなわち、本発明のシステムは、空間が狭くかつ十分な視野が無いMRI装置内でも実施可能である。
【0022】
(実施例3)
本発明の手術システムにおいて、実施例2の別の態様として、硬性の内視鏡(腹腔鏡や胸腔鏡)を使用する腹腔鏡手術もすることもできる。
腹腔鏡の先端に位置センサーを付けることで実施例2と同様の手術が可能となる。さらに複数本の内視鏡に位置のセンサーを付けた場合、それぞれの位置を相互に確認しあうことにより、より正確な位置確認や画像情報の統合もが可能となる。
【産業上の利用可能性】
【0023】
本発明は、リアルタイムに生体の内部状況とデバイスの位置を画像によって確認でき、被曝が無い安全な手術システムを提供する。
【特許請求の範囲】
【請求項1】
三次元リアルタイムMR画像下での手術システムであって:
MRI装置と;
MRI装置及び撮像面を制御し、MRI装置からのMR画像を連続的に伝送することにより、リアルタイムMR画像をメインワークステーションに伝送するMRワークステーションと;
軟性導体内視鏡の位置及び/又はマイクロ波デバイスの位置を特定し、該位置画像をメインワークステーションに伝送する磁気トラッキング装置及び/又は光学式の位置センサー装置と;
軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと;
予め取得した生体内画像、該リアルタイムMR画像、並びに/又は該軟性導体内視鏡の位置及び/若しくはマイクロ波デバイスの位置画像を統合可能なメインワークステーションと、を有し、
術者がリアルタイムに生体の内部状況とデバイスの位置を画像によって確認し、処置する生体物及びデバイスの位置を確認しながら手術できる手術システム。
【請求項1】
三次元リアルタイムMR画像下での手術システムであって:
MRI装置と;
MRI装置及び撮像面を制御し、MRI装置からのMR画像を連続的に伝送することにより、リアルタイムMR画像をメインワークステーションに伝送するMRワークステーションと;
軟性導体内視鏡の位置及び/又はマイクロ波デバイスの位置を特定し、該位置画像をメインワークステーションに伝送する磁気トラッキング装置及び/又は光学式の位置センサー装置と;
軟性導体内視鏡の制御・操作及び/又はマイクロ波手術デバイスの制御・操作のための制御ワークステーションと;
予め取得した生体内画像、該リアルタイムMR画像、並びに/又は該軟性導体内視鏡の位置及び/若しくはマイクロ波デバイスの位置画像を統合可能なメインワークステーションと、を有し、
術者がリアルタイムに生体の内部状況とデバイスの位置を画像によって確認し、処置する生体物及びデバイスの位置を確認しながら手術できる手術システム。
【図1】


【図2】
【図2】
【公開番号】特開2013−63158(P2013−63158A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−203232(P2011−203232)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(504177284)国立大学法人滋賀医科大学 (41)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(504177284)国立大学法人滋賀医科大学 (41)
【Fターム(参考)】
[ Back to top ]