
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、計測車で道路上を移動しながら路面の位置と高さを示す三次元点群データを計測し、そのデータに基づいて、IRI算出の基礎データとなる路面の縦断プロファイルを作成する三次元レーザ計測システムと、その縦断プロファイルの作成方法に関する。
【背景技術】
【0002】
IRI(International Roughness Index)は、自動車の乗り心地を評価するために路面の凹凸を指標で表わしたもので、1986年に世界銀行が提案したものである。日本では一般に国際ラフネス指標と訳されている。IRIの計算は、定義されたサスペンションとタイヤという二つのバネおよびダンパ、そしてバネの上下の質量によって構成されたクウォーターカーモデル車をシミュレーションとして使って行う。
【0003】
IRIの計算に必要なものは、道路の路面の「縦断プロファイル」であり、これは道路を縦断方向に沿ってスライスしたものである(特許文献1参照)。縦断プロファイルは、路面の凹凸を示す高さの座標と走行方向の距離を含み、このうち高さの情報はタイヤ位置で走行方向に25cm以下の間隔で一点必要とされている。
【0004】
IRIの計算は路面の縦断プロファイルを用い、所定の式に基づいて行うが、この計算を手計算で行うことは現実的に困難であるため、計算プログラムを利用してコンピュータで処理している。このプログラムの代表的なものとしては、世界中の道路技術者が使っている“Proval”と呼ばれるソフトウェアがある。
【0005】
上述したように、IRIは基本的に、路面の凹凸と走行距離を縦断プロファイルとして計算するものである。走行距離は対象区間の道路台帳などの既存資料があり、計測後に検証しやすいため、特に凹凸のプロファイルの精度が重要となる。
【0006】
路面の縦断プロファイルを得るための機器およびシステムをプロファイラと呼ぶ。プロファイラの違いによってIRIは国際的なクラス分けがされている。そのクラス分けを表1に示す。
【0007】
【表1】

【0008】
表1のクラス1のプロファイラは正確な縦断プロファイルが得られるが測定に時間がかかり、クラス4のプロファイラは正確性に問題があるため、従来より、路面の縦断プロファイルの計算にはクラス2または3のプロファイラが使用されてきた。クラス2のプロファイラは、水準測量以外の任意の測定装置で縦断プロファイルを得ることができ、クラス3のプロファイラは、レスポンス型の機器で路面の応答を得ることができるものであるが、以下に示す問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】:特許第4220929号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
クラス2のプロファイラで代表的なものは、計測車の下に車高センサを複数取り付け、車高下の高さを連続して計測しつつ、別途取り付けたジャイロでローリング角、ピッチング角を補正し、路面の縦断プロファイルを得るものである。しかし、計測車の加速の影響を受けることや、各車高センサのジャイロによる補正を行うなど、いくつかの調整段階があり、最終的に直接水準測量で得た縦断プロファイルとキャリブレーションすることで、測定精度を上げることが必須となっていた。
【0011】
クラス3のプロファイラは、計測車に取り付けた下向きの加速度センサによって路面の凹凸に対する車の応答を連続記録し、これより直接的にIRIを得るものである。このプロファイラは、縦断プロファイルそのものの情報を得ることはできない。また、計測車の走行速度などの影響が比較的大きいため、既知の検証用区間で試験走行し、応答値とIRIが相関するようにキャリブレーションをすることで精度を確保していた。
【0012】
更に、従来のクラス2および3のプロファイラは、得られた縦断プロファイル、あるいは応答値から得たIRIの精度を確保するために、上位のクラスのプロファイラによるキャリブレーションが必須である。現状では、水準測量を行うクラス1のプロファイラによってキャリブレーションを行っているが、これらのキャリブレーションは時間を要すると同時に、精度あるいは相関性に限度がある。
【0013】
本発明はこのような問題点に鑑みてなされたもので、複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システム、および縦断プロファイルの作成方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため本発明にかかる三次元レーザ計測システムは、三次元座標で表された道路の路面の平面位置と高さを示す三次元点群データに基づいて路面の凹凸を示す縦断プロファイルを作成する三次元レーザ計測システムであって、
車体にレーザスキャナ、GPS受信機および慣性計測装置が搭載され、道路上を移動しながら、前記レーザスキャナを用いて路面の平面位置と高さを計測して第1の三次元点群データを取得し、前記GPS受信機および慣性計測装置を用いて前記車体の位置および姿勢に関する情報を取得する計測車と、
前記レーザスキャナ、GPS受信機および慣性計測装置で取得されたデータに基づいて前記路面の縦断プロファイルを作成する縦断プロファイル作成装置と、を備え、
前記縦断プロファイル作成装置は、
前記レーザスキャナで取得した第1の三次元点群データを、前記GPS受信機および慣性計測装置で取得した情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成するデータ修正部と、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて前記縦断プロファイルを作成する縦断プロファイル作成部と、を有することを特徴とする。
【0015】
ここで、前記縦断プロファイル作成部は、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出し、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出し、
前記中間点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出することが好ましい。
【0016】
また前記縦断プロファイル作成部は、前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することが好ましい。
【0017】
また前記縦断プロファイル作成部は、
前記第4の三次元点群データの平面位置の情報に基づいて、任意の計測点を始点とし、前記計測車の進行方向に向かう所定の大きさの第1のベクトルを作成し、
前記第1のベクトルの作成と同様の手順で、前記第1のベクトルの終点を始点とする同一の大きさの第2のベクトルを繰り返し作成し、
前記第1および第2のベクトルと直交する方向に前記中間点の平面位置を算出することが好ましい。
【0018】
また前記縦断プロファイル作成部は、前記第4の三次元点群データのうち、前記任意の計測点から走行方向に向けて前記所定の大きさを越える位置にある計測点のうち最も近い計測点を選択し、この計測点を終点とするベクトルを作成し、そのベクトルの大きさを前記所定の大きさに変えて前記第1のベクトルを作成することが好ましい。
【0019】
また前記縦断プロファイル作成部は、前記第1のベクトルまたは第2のベクトルの中点からベクトルと直交し、かつ前記タイヤの軌跡の中心方向に向かう第4のベクトルを作成し、その終点を前記タイヤの軌跡の中点としたときの前記終点の位置を前記中間点とすることが好ましい。
【0020】
また前記縦断プロファイル作成部は、前記第3の三次元点群データから前記中間点の周辺の領域にある計測点の高さの情報を抽出し、その高さの平均値を算出することが好ましい。特に、前記中間点を中心とした所定の半径の円を描き、その円内に含まれる計測点の高さの平均値を算出することが好ましい。
【0021】
また本発明にかかる縦断プロファイルの作成方法は、
計測車に搭載されたレーザスキャナを用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データを取得する第1のステップと、
前記第1の三次元点群データを、前記計測車に搭載されたGPS受信機および慣性計測装置を用いて取得した前記計測車の位置および姿勢に関する情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成する第2のステップと、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、前記路面の凹凸を示す縦断プロファイルを作成する第3のステップと、を含むことを特徴とする。
【発明の効果】
【0022】
本発明の三次元レーザ計測システムを用いれば、計測車で移動しながら計測したデータに基づいて、キャリブレーションを必要とすることなく、高精度かつ長距離の道路の縦断プロファイルを作成できる。更に、高速道路において、通常の速度で運転しながら路面のデータを計測できるため、一回の計測で数百キロの区間の縦断プロファイルを作成することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施の形態にかかる三次元レーザ計測システムの機能的な構成を示すブロック図である。
【図2】図1の計測車のハードウェア資源の一例を示すブロック図である。
【図3】計測車による計測の様子を示す概念図である。
【図4】図1の縦断プロファイル作成装置のハードウェア資源の一例を示すブロック図である。
【図5】三次元点群データに基づいて路面の縦断プロファイルを作成する手順を示すフローチャートである。
【図6】計測車のタイヤの軌跡を上方から見た図である。
【図7】縦断プロファイルの作成手順を説明する図(その1)である。
【図8】縦断プロファイルの作成手順を説明する図(その2)である。
【図9】縦断プロファイルの作成手順を説明する図(その3)である。
【図10】縦断プロファイルの作成手順を説明する図(その4)である。
【図11】測定精度の検証区間の説明図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態にかかる三次元レーザ計測システムについて、図面を参照しながら説明する。
【0025】
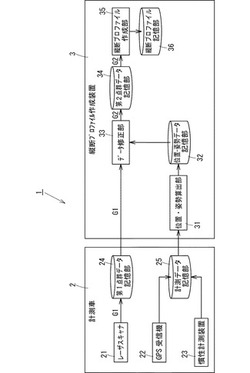
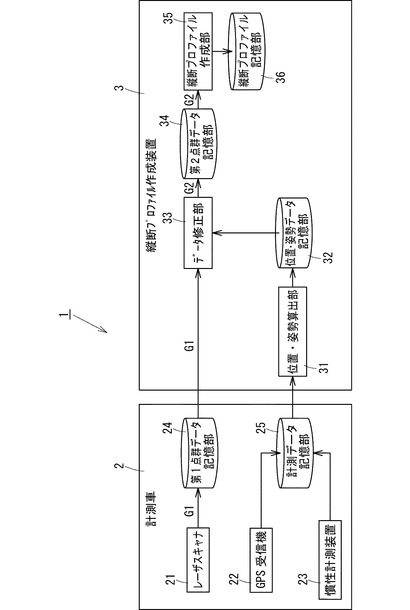
図1は、本発明の実施の形態にかかる三次元レーザ計測システムの機能的な構成をブロックで示した図である。三次元レーザ計測システム1は、道路上を移動しながら必要なデータを収集する計測車2と、計測車2で収集されたデータに基づいて、路面の縦断プロファイルを作成する縦断プロファイル作成装置2とで構成されている。
【0026】
三次元レーザ計測システムの構成と機能について説明する前に、路面の縦断プロファイルを作成する際の基本的なステップを説明する。本発明では、以下の3段階のステップにより路面の縦断プロファイルを作成している。
【0027】
最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する(第1のステップ)。
【0028】
次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する(第2のステップ)。
【0029】
最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、路面の縦断プロファイルを作成する(第3のステップ)。
【0030】
<計測車の構成と機能>
次に、上記第1のステップを実現する計測車2の構成と機能について説明する。計測車2は、天板にレーザスキャナ21、GPS受信機22および慣性計測装置23が搭載されている。また計測車2は、レーザスキャナ21で取得した三次元点群データを記憶する第1点群データ記憶部24、ならびにGPS受信機22および慣性計測装置23で取得した計測データを記憶する計測データ記憶部25を備えている。
【0031】
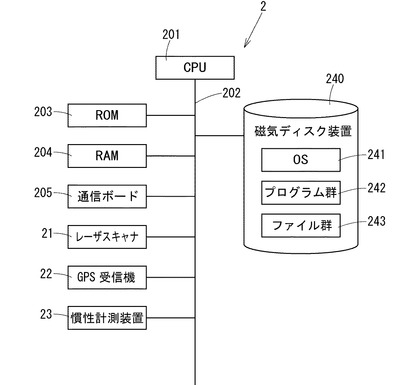
図2は、計測車2のハードウェア資源の一例を示した図である。図1にブロックで示した計測車2の各機能は、図2に示したハードウェア資源を用いて実現される。計測車2は、プログラムを実行するCPU201を備えている。CPU201はバス202を介してROM203、RAM204、通信ボード205および磁気ディスク装置210と接続され、これらのハードウェアを制御する。通信ボード205は、有線または無線でLAN(Local Area Network)やインターネットなどのネットワークに接続されている。
【0032】
更にCPU201は、バス202を介してレーザスキャナ21、GPS受信機22および慣性計測装置23に接続され、これらのデバイスの動作を制御する。
【0033】
磁気ディスク装置240には、OS241、プログラム群242およびファイル群243が格納されている。プログラム群242のプログラムはCPU201により読み出されて実行される。ファイル群243には、レーザスキャナ21、GPS受信機22および慣性計測装置23で取得された各種のデータがファイルの形で格納される。なお、磁気ディスク装置240の代りに他の記憶装置(例えば、フラッシュメモリ)を用いてもよい。
【0034】
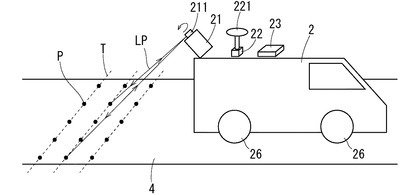
次に、図1および図3を用いて、レーザスキャナ21、GPS受信機22および慣性計測装置23の機能を説明する。図3は、計測車2による計測の様子を示す概念図である。計測車2の天板には、レーザスキャナ21、GPS受信機22および慣性計測装置23が固定した状態で搭載されている。また計測車2の下部にはタイヤ26が取り付けられている。
【0035】
レーザスキャナ21は、計測車2の天板に搭載された360度連続回転式のスキャン部211から所定の時間間隔でレーザパルスLPを発射し、レーザパルスLPがレーザ発射部分と対象物の間を往復する時間で道路4の路面までの距離を計測する。また、スキャナ211の取り付け角度と回転方向によって方向角を得ることができる。結果として、レーザが照射された各計測点Pの極座標で表された三次元座標を得ることができる。
【0036】
レーザスキャナ21は、対象点の座標群が特異性を持たないように、計測車2の天板の後部に、鉛直方向および水平方向の両方に対して角度をつけて取り付けられているため、路面において計測点Pが斜めのレーザ計測ラインTに沿って得られる。計測車2が道路上を走行することにより、レーザ計測ラインTは計測車2の走行方向に移動し路面の計測点Pの三次元データが連続して得られる。この三次元データは、平面位置と高さの座標をもっている。このようにして得られた計測点Pの三次元データの集まりである三次元点群データG1は、計測時刻と共に、第1点群データ記憶部24に記憶される。
【0037】
GPS受信機22は、複数のGPS(Global Positioning System)衛星のそれぞれから発信された測位信号の搬送波を観測し、この搬送波の観測情報に基づいて、GPS受信機22のアンテナ221の位置を、三次元座標で表された位置情報として取得する。
【0038】
慣性計測装置(通常、IMU“Inertial Measurement Unit”と呼ばれる)23は、運動を司る3軸の角度(または角速度)と加速度を計測する装置である。慣性計測装置23は、基本的に、3軸のジャイロと3方向の加速度計によって、三次元の角速度と加速度を求める。慣性計測装置23は、通常、搭載する移動体の重心位置に設置される。
【0039】
GPS受信機22で取得された位置情報のデータと慣性計測装置23で計測された角度(または角速度)と加速度のデータは、計測データ記憶部25に記憶される。
【0040】
<縦断プロファイル作成装置の構成と機能>
次に、上述の第2のステップと第3のステップを実現する縦断プロファイル作成装置3の構成と機能について説明する。縦断プロファイル作成装置3は、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35を備えている。また断面プロファイル作成装置3は作成されたデータを記憶する位置・姿勢データ記憶部32、第2点群データ記憶部34および縦断プロファイル記憶部36を備えている。
【0041】
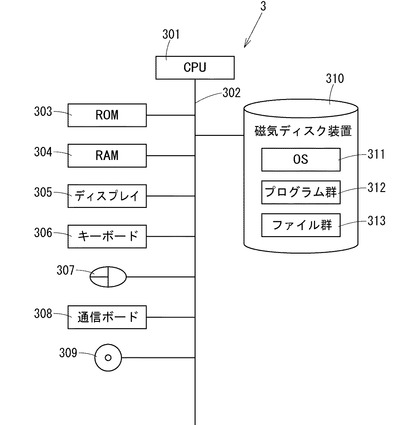
図4は断面プロファイル作成装置3のハードウェア資源の一例を示した図である。図1にブロックで示した縦断プロファイル作成装置3の各機能は、図4に示したハードウェア資源を用いて実現される。
【0042】
縦断プロファイル作成装置3は、プログラムを実行するCPU301を備えている。CPU301はバス302を介してROM303、RAM304、ディスプレイ305、キーボード306、マウス307、通信ボード308、光ディスク装置309および磁気ディスク装置310と接続され、これらのハードウェアを制御する。なお、磁気ディスク装置310の代りに他の記憶装置(例えば、フラッシュメモリ)を用いてもよい。
【0043】
ディスプレイ305は出力機器の一例、キーボード306およびマウス307は入力機器の一例である。通信ボード308、光ディスク装置309および磁気ディスク装置310は、入力および出力を兼ねた機器の一例である。通信ボード305は、有線または無線でLANやインターネットなどのネットワークに接続されている。
【0044】
磁気ディスク装置310には、OS311、プログラム群312およびファイル群313が格納されている。プログラム群312には、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35の各機能を実現するプログラムが格納されている。プログラム群312のプログラムはCPU301により読み出されて実行される。ファイル群313には、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35で作成された各種のデータがファイルの形で格納される。
【0045】
計測車2の第1点群データ記憶部24および計測データ記憶部25に格納された計測データは、ハードウェア資源の通信ボード205および308を介して、もしくはメモリーカード等を用いて計測車2の磁気ディスク装置210から読み出され、縦断プロファイル作成部35のデータ修正部33および位置・姿勢算出部31にそれぞれ転送される。
【0046】
<第2のステップの説明>
次に、縦断プロファイル作成装置3における処理について説明する。最初に、レーザスキャナ21で計測された第1の三次元点群データG1を修正して、直交する3軸で表される地理座標系の第2の三次元点群データG2に変換する手順(第2のステップ)を説明する。
【0047】
位置・姿勢算出部31は、各計測時刻における計測車2の位置および姿勢角を特定の座標系(本実施の形態では地理座標系)で算出する。位置・姿勢算出部31は、計測データ記憶部25から、GPS受信機22で取得した計測車2の緯度、経度および高さのデータ、ならびに慣性計測装置23で計測した角度(または角速度)および角加速度のデータを読み出し、これらのデータに基づいて、各時刻における計測車2の位置および姿勢角(ロール角、ピッチ角、ヨー角)を算出する。
【0048】
地理座標系は世界測地系でも任意座標のいずれでもよく、例えば、最初に観測した、任意の位置の路面のレーザ照射点を(x,y,z)=(0,0,0)としてもよい。算出された計測車2の位置および姿勢のデータは、位置・姿勢データ記憶部32に記憶される。
【0049】
データ修正部33は、計測車2の第1点群データ記憶部24からレーザスキャナ21で計測した第1の三次元点群データG1を読み出す。また位置・姿勢データ記憶部32から各時刻における計測車2の位置および姿勢のデータを読み出す。
【0050】
データ修正部33は、読み出したデータに基づいて各時刻における路面の地理座標系の第2の三次元点群データG2を作成する。極座標で表された第1の三次元点群データG1を、計測車2の位置および姿勢のデータに基づいて、地理座標系で表された第2の三次元点群データG2に変換する演算式は、例えば特開2009−204615号公報に記載されているように広く知られているため、ここでは説明を省略する。データ修正部33で作成された地理座標系の第2の三次元点群データG2は、第2点群データ記憶部34に記憶される。
【0051】
<第3のステップの説明>
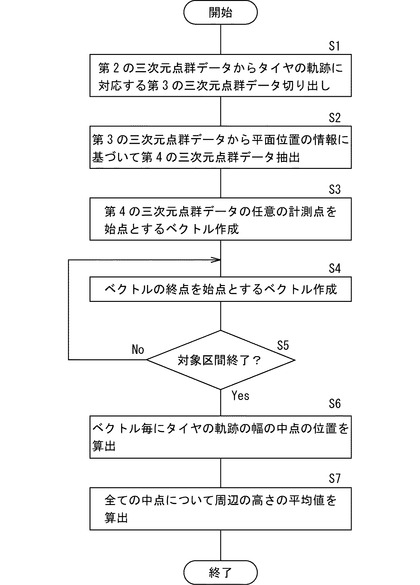
次に、図5のフローチャートを参照して、地理座標系に変換された第2の三次元点群データG2に基づいて路面の縦断プロファイルを作成する手順(第3のステップ)を説明する。
【0052】
本発明の第3のステップでは、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて縦断プロファイルを作成する。
【0053】
具体的には、第3の三次元点群データG3から、平面位置の情報に基づいてタイヤの軌跡Twの一方の端の計測点を含む第4の三次元点群データG4を抽出する。更に、この第4の三次元点群データG4に基づいて、タイヤの軌跡Twにおける所定の間隔毎の中間点の平面位置を算出し、この中間点の平面位置および第3の三次元点群データG3に基づいて中間点の高さを算出している。
【0054】
このようにして得られたタイヤの軌跡Twにおける所定の間隔毎の中間点の高さのデータが縦断プロファイルとなる。以下、縦断プロファイルの作成手順について、具体的に説明する。
【0055】
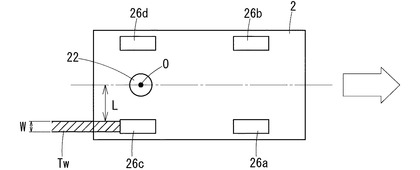
図6に、計測車2のタイヤの軌跡を上方から見た状態を示す。なお、図には説明に必要な部材のみを表示している。斜線で示した幅Wの帯は、右後部のタイヤ26cの軌跡Twである。図の例では、GPS受信機22は計測車2の天板の後部中央に設置され、またタイヤ26a〜26dはGPS受信機22の基準点Oを通る中心線からそれぞれ所定の距離離して設置されている。
【0056】
縦断プロファイル作成部35は、第2点群データ記憶部34に格納された地理座標系の第2の三次元点群データG2から、中心線からの距離Lを目安として、右後方のタイヤ26cの軌跡Twに対応する幅Wの第3の三次元点群データG3を切り出す(ステップS1)。
【0057】
タイヤの軌跡Twは、タイヤの実際の軌跡である必要はなく、タイヤ26が設置された位置に対応する箇所(中心線から距離Lだけ離れた箇所)の幅のある部分のことをいう。また図では、タイヤの軌跡Twとして右後部のタイヤ26cの軌跡を示しているが、左後部のタイヤ26dの軌跡であってもよく、更には、右と左のそれぞれのタイヤの軌跡であってもよい。
【0058】
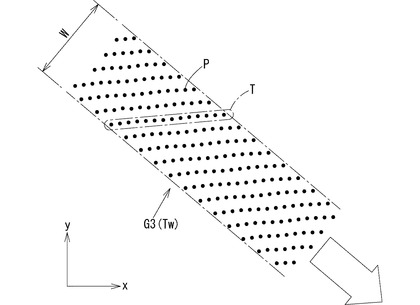
次に、切り出された軌跡Twの第3の三次元点群データG3から平面位置に関する情報を取り出し、この情報に基づいて計測車2のタイヤの走行方向を決定する方法について説明する。
【0059】
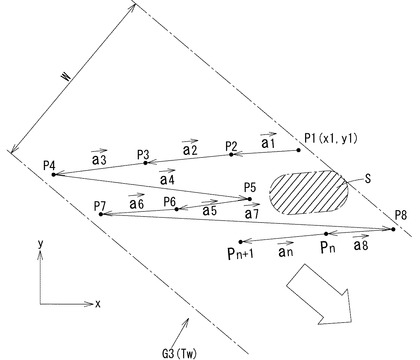
図7に、タイヤ26aの軌跡Twとして切り出された幅Wの第3の三次元点群データG3を、平面位置を示すx−y平面上に投影した状態を示す。図中、矢印は計測車2の走行方向を示している。図7に示すように、切り出された計測点Pのデータはレーザパルスの発射の特徴からほぼライン状に並び、始点から終点までで一本のラインTをなしている。
【0060】
縦断プロファイル作成部35は、タイヤの走行方向を決定するため、レーザ計測ラインTの始点と終点を抽出する。抽出方法は、隣接する2つの計測点を始点および終点とするベクトルの大きさと方向角の変化を利用して、一つのラインの終点から次のラインの始点に移動したことを座標計算で確認するものである。
【0061】
図8は、説明のため図7の点群データG3の一部を簡略化して示したものである。各計測点Pの位置は直交座標系(x,y)で表されている。計測時刻の順に計測点Pに符号を付し、計測点PnとPn+1を結ぶベクトルをanとすると、その間の距離、すなわちベクトルanの大きさは式(1)で表される。またベクトルanの方位角σnとベクトルan+1の方位角σn+1の変化量は式(2)で表される。
【0062】
【数1】
【0063】
上記式(1)および式(2)を利用して、レーザ計測ラインTの始点と終点を抽出できる。例えば、図8において点P4と点P5の距離は、点P3と点P4のような計測ラインT上の点群よりも大きくなる。またベクトルa4の方向角σ4もベクトルa3の方向角σ3に比べて反転に近く変化することから、点P4が計測ラインTの終点であることが分かる。
【0064】
同様に、点P7と点P8の距離は、点P6と点P7の距離よりも大きくなる。またベクトルa8の方向角σ8はベクトルa7の方向角σ7に比べて反転に近く変化することから、点P8が計測ラインTの始点であることが分かる。
【0065】
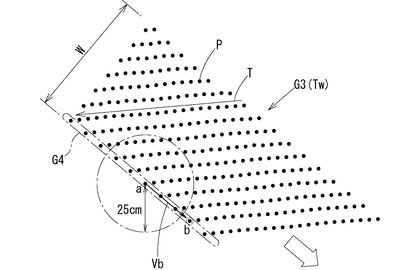
このように、ベクトルanの大きさおよび方向角の変化量が、共にあらかじめ設定した閾値を超えた場合には、その計測点(始点)がレーザ計測ラインTの終点であり、次の計測点(終点)がレーザ計測ラインTの始点であると判定できる。このようにして抽出した始点群または終点群を第4の三次元点群データG4(図9参照)としてメモリ(図4のRAM304)に記憶する(ステップ2)。
【0066】
上述の判定方法を用いれば、図8に斜線で囲まれた領域Sで示すように、レーザ計測時に路面の輝度の状況などで、本来取得できるべき範囲で計測点に欠点が発生しても、ベクトルの大きさの閾値をベクトルa4の大きさ、すなわち点P4と点P5との距離より大きく設定しておけば、レーザ計測ラインTの始点とは判定されない。この方法により、十分な精度でレーザ計測ラインTの始点と終点の抽出ができる。
【0067】
なお、本実施の形態では、第4の三次元点群データG4として終点群(P4、P7、・・・)を選択したが、始点群を選択してもよいことは云うまでもない。始点群を選択したときは、本質的な違いではないが、縦断プロファイルを作成する手順が終点群を選択した場合と若干異なってくる。
【0068】
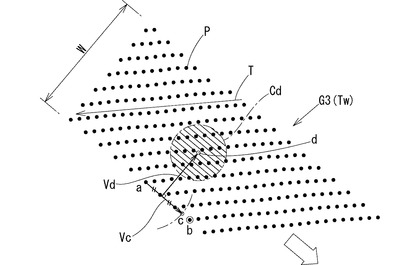
図9に示すように、第4の三次元点群データG4の配列方向は計測車2のタイヤの走行方向に一致している。三次元点群データG4のうち任意の計測点aから所定の距離、本実施の形態では25cmを超える距離で、かつ最も25cmに近い走行方向にある計測点bを計算により探し出す。この二つの計測点aおよびbの座標から方向ベクトルVbを作成し、これを単位ベクトルに直す。更に、このようにして得た単位ベクトルから25cmの長さを持つベクトルVcを作成する(ステップS3)。図10に示すように、ベクトルVcの終点は、実際には計測点のデータとして取得していない仮想点cである。
【0069】
次に、ベクトルVcの仮想終点cを始点として、走行方向にベクトルVcと同じ大きさ、すなわち25cmの長さを持つベクトルを上述したのと同じ手順で作成する(ステップS4)。縦断プロファイルの作成対象区間が終了するまでこの処理を繰り返し行うことで(ステップS5においてNo)、曲線を含むタイヤの走行方向と走行距離に関する情報を得ることができる。
【0070】
次に、図10を参照して、計測車2の走行方向に沿って、IRI算出に必要となる25cm間隔で路面の凹凸を含む高さの情報を取得する方法について説明する。
【0071】
上述のステップS3およびS4で得られた走行方向のベクトルVcに対して、ベクトルの中点からベクトルVcと直交し、タイヤの軌跡の中心方向に向かうベクトルVdを作成する。このベクトルVdの終点を、タイヤの軌跡Twの中間点(本実施の形態では中点、すなわち幅Wの2分の1の点)とする。縦断プロファイル作成部35は、ベクトルVcの始点と終点の位置座標に基づいてベクトルVdの終点(タイヤの軌跡Twの中点)dの平面位置を示すx−y座標を算出する(ステップS6)。
【0072】
ベクトルVdの終点である中点dは、実際にはデータを計測していない仮想点であるため、高さの情報がない。このため、縦断プロファイル作成部35は、中点dの周辺の領域、具体的には中点dを中心に所定の半径を持った円Cdを想定し、その中にある実在する計測点Pのデータを前述の第3の三次元点群データG3から抽出する。
【0073】
このようにして得た円Cd内の実在点の高さの座標(z)の平均値を算出すると、中点dにおける高さの情報が得られる(ステップS7)。ステップS6およびS7において、縦断プロファイルの対象区間内の全ての中点dの水平位置の情報と高さの情報を算出すれば、IRI算出に必要となる道路の路面を25cm間隔で計測した縦断プロファイル(凹凸を含む高さ)のデータが得られる。
【0074】
実際に、クラス1のプロファイラで定義されている作業は、25cm毎に上述の仮想点dに標尺を立てて水準測量を行うというものであり、上述の計算によってこの作業を再現している。
【0075】
また計測車2で走行した縦断プロファイルの対象区間の開始点と終了点の間で、ステップS3およびS4の計算過程で得られたベクトルVcの総数に25cmを掛けると、タイヤの走行方向に沿った累積距離が得られる。
【0076】
なお、本実施の形態では、ベクトルVdの始点をベクトルVcの中点に設定したが、必ずしもベクトルVcの中点に設定する必要はない。例えば、ベクトルVcの始点または終点を始点として、タイヤの軌跡の中心方向に向かうベクトルを作成し、これをベクトルVdとしてもよい。
【0077】
また本実施の形態では、ベクトルVdの終点をタイヤの軌跡Twの中点に設定したが、必ずしも中点である必要はなく、タイヤの軌跡Twの端部から一定の距離だけ離れた中間点に設定してもよい。
【0078】
また本実施の形態では、高さの平均値を算出する周辺の領域を、仮想点である中点dから所定の半径の円で囲まれた領域としたが、必ずしも円である必要はない。例えば、データ抽出の容易さから、仮想点dを中心とする正方形で囲まれた領域としてもよい。
【0079】
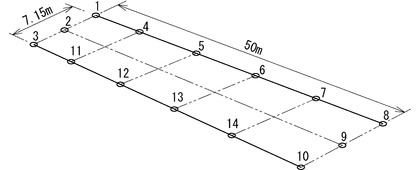
<測定精度の検証>
本発明の三次元レーザ計測システムを用いて、図11に示すように道路幅員7.15m、延長50mの区間で路面の凹凸と走行距離を計測し、水準測量で実測した値と比較することにより測定精度を検証した。検証では、50m区間の道路両側をそれぞれ5等分し、10m間隔で計測点を設けて、実測と本発明の計測システムによる計測の結果を比較した。なお、本実施の形態では、レーザスキャナ21として、1秒間に30万点(300kHz)の計測を行うことができ、また点群の密度が4cmのスキャナを用いた。
【0080】
計測結果を表2に示す。各行には、計測点毎に、実測値、本発明の計測システムを用いて計測した高さ(z軸方向の値)、および実測値との誤差を示している。
【0081】
【表2】
【0082】
計測点1を互いの基準点とした場合、本発明の計測システムのよる計測の誤差は最大でも3mmであった。これは、本発明の計測システムにおける計測では、路面の凹凸のプロファイルを得る手段として、実測に相当する精度を確保できることを示している。
【0083】
以上説明したように、本発明の三次元レーザ計測システムでは、路面から得られた三次元の座標データに基づき、縦断プロファイルとして、車のタイヤの中心位置で、走行方向に連続して25cm間隔の凹凸のデータを得ることができる。IRIを計算する後工程は、このようにして作成した縦断プロファイルを用い、前述の“Proval”などの公知のプログラムを利用して容易に算出することができる。
【0084】
前述の表2に示した検証結果より明らかなように、レーザスキャナを用いて得た高さの座標が、直接水準測量の精度を十分に確保できていること、および計算のアルゴリズムが、直接水準測量の作業を再現していることなどから、本発明の三次元レーザ計測システムはクラス1のプロファイラに分類できるものである。
【0085】
また本発明の三次元レーザ計測システムを用いれば、高速道路においても低速走行することなくデータの収集ができるため、交通規制が不要であり、一日で数百キロの区間の計測を行うことも可能である。
【0086】
更に、本発明の三次元レーザ計測システムを用いれば、長距離の区間についても比較的短時間でクラス1のIRIを得ることができることから、従来のクラス2やクラス3のプロファイラの精度検証およびキャリブレーションに利用することが可能となる。
【符号の説明】
【0087】
1 三次元レーザ計測システム
2 計測車
3 縦断プロファイル作成装置
4 道路
21 レーザスキャナ
22 GPS受信機
23 慣性計測装置
24 第1点群データ記憶部
25 計測データ記憶部
26、26a〜26d タイヤ
31 位置・姿勢算出部
32 位置・姿勢データ記憶部
33 データ修正部
34 第2点群データ記憶部
35 縦断プロファイル作成部
36 縦断プロファイル記憶部
211 スキャン部
221 アンテナ
P 計測点
T レーザ計測ライン
LP レーザパルス
【技術分野】
【0001】
本発明は、計測車で道路上を移動しながら路面の位置と高さを示す三次元点群データを計測し、そのデータに基づいて、IRI算出の基礎データとなる路面の縦断プロファイルを作成する三次元レーザ計測システムと、その縦断プロファイルの作成方法に関する。
【背景技術】
【0002】
IRI(International Roughness Index)は、自動車の乗り心地を評価するために路面の凹凸を指標で表わしたもので、1986年に世界銀行が提案したものである。日本では一般に国際ラフネス指標と訳されている。IRIの計算は、定義されたサスペンションとタイヤという二つのバネおよびダンパ、そしてバネの上下の質量によって構成されたクウォーターカーモデル車をシミュレーションとして使って行う。
【0003】
IRIの計算に必要なものは、道路の路面の「縦断プロファイル」であり、これは道路を縦断方向に沿ってスライスしたものである(特許文献1参照)。縦断プロファイルは、路面の凹凸を示す高さの座標と走行方向の距離を含み、このうち高さの情報はタイヤ位置で走行方向に25cm以下の間隔で一点必要とされている。
【0004】
IRIの計算は路面の縦断プロファイルを用い、所定の式に基づいて行うが、この計算を手計算で行うことは現実的に困難であるため、計算プログラムを利用してコンピュータで処理している。このプログラムの代表的なものとしては、世界中の道路技術者が使っている“Proval”と呼ばれるソフトウェアがある。
【0005】
上述したように、IRIは基本的に、路面の凹凸と走行距離を縦断プロファイルとして計算するものである。走行距離は対象区間の道路台帳などの既存資料があり、計測後に検証しやすいため、特に凹凸のプロファイルの精度が重要となる。
【0006】
路面の縦断プロファイルを得るための機器およびシステムをプロファイラと呼ぶ。プロファイラの違いによってIRIは国際的なクラス分けがされている。そのクラス分けを表1に示す。
【0007】
【表1】
【0008】
表1のクラス1のプロファイラは正確な縦断プロファイルが得られるが測定に時間がかかり、クラス4のプロファイラは正確性に問題があるため、従来より、路面の縦断プロファイルの計算にはクラス2または3のプロファイラが使用されてきた。クラス2のプロファイラは、水準測量以外の任意の測定装置で縦断プロファイルを得ることができ、クラス3のプロファイラは、レスポンス型の機器で路面の応答を得ることができるものであるが、以下に示す問題があった。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】:特許第4220929号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
クラス2のプロファイラで代表的なものは、計測車の下に車高センサを複数取り付け、車高下の高さを連続して計測しつつ、別途取り付けたジャイロでローリング角、ピッチング角を補正し、路面の縦断プロファイルを得るものである。しかし、計測車の加速の影響を受けることや、各車高センサのジャイロによる補正を行うなど、いくつかの調整段階があり、最終的に直接水準測量で得た縦断プロファイルとキャリブレーションすることで、測定精度を上げることが必須となっていた。
【0011】
クラス3のプロファイラは、計測車に取り付けた下向きの加速度センサによって路面の凹凸に対する車の応答を連続記録し、これより直接的にIRIを得るものである。このプロファイラは、縦断プロファイルそのものの情報を得ることはできない。また、計測車の走行速度などの影響が比較的大きいため、既知の検証用区間で試験走行し、応答値とIRIが相関するようにキャリブレーションをすることで精度を確保していた。
【0012】
更に、従来のクラス2および3のプロファイラは、得られた縦断プロファイル、あるいは応答値から得たIRIの精度を確保するために、上位のクラスのプロファイラによるキャリブレーションが必須である。現状では、水準測量を行うクラス1のプロファイラによってキャリブレーションを行っているが、これらのキャリブレーションは時間を要すると同時に、精度あるいは相関性に限度がある。
【0013】
本発明はこのような問題点に鑑みてなされたもので、複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システム、および縦断プロファイルの作成方法を提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため本発明にかかる三次元レーザ計測システムは、三次元座標で表された道路の路面の平面位置と高さを示す三次元点群データに基づいて路面の凹凸を示す縦断プロファイルを作成する三次元レーザ計測システムであって、
車体にレーザスキャナ、GPS受信機および慣性計測装置が搭載され、道路上を移動しながら、前記レーザスキャナを用いて路面の平面位置と高さを計測して第1の三次元点群データを取得し、前記GPS受信機および慣性計測装置を用いて前記車体の位置および姿勢に関する情報を取得する計測車と、
前記レーザスキャナ、GPS受信機および慣性計測装置で取得されたデータに基づいて前記路面の縦断プロファイルを作成する縦断プロファイル作成装置と、を備え、
前記縦断プロファイル作成装置は、
前記レーザスキャナで取得した第1の三次元点群データを、前記GPS受信機および慣性計測装置で取得した情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成するデータ修正部と、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて前記縦断プロファイルを作成する縦断プロファイル作成部と、を有することを特徴とする。
【0015】
ここで、前記縦断プロファイル作成部は、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出し、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出し、
前記中間点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出することが好ましい。
【0016】
また前記縦断プロファイル作成部は、前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することが好ましい。
【0017】
また前記縦断プロファイル作成部は、
前記第4の三次元点群データの平面位置の情報に基づいて、任意の計測点を始点とし、前記計測車の進行方向に向かう所定の大きさの第1のベクトルを作成し、
前記第1のベクトルの作成と同様の手順で、前記第1のベクトルの終点を始点とする同一の大きさの第2のベクトルを繰り返し作成し、
前記第1および第2のベクトルと直交する方向に前記中間点の平面位置を算出することが好ましい。
【0018】
また前記縦断プロファイル作成部は、前記第4の三次元点群データのうち、前記任意の計測点から走行方向に向けて前記所定の大きさを越える位置にある計測点のうち最も近い計測点を選択し、この計測点を終点とするベクトルを作成し、そのベクトルの大きさを前記所定の大きさに変えて前記第1のベクトルを作成することが好ましい。
【0019】
また前記縦断プロファイル作成部は、前記第1のベクトルまたは第2のベクトルの中点からベクトルと直交し、かつ前記タイヤの軌跡の中心方向に向かう第4のベクトルを作成し、その終点を前記タイヤの軌跡の中点としたときの前記終点の位置を前記中間点とすることが好ましい。
【0020】
また前記縦断プロファイル作成部は、前記第3の三次元点群データから前記中間点の周辺の領域にある計測点の高さの情報を抽出し、その高さの平均値を算出することが好ましい。特に、前記中間点を中心とした所定の半径の円を描き、その円内に含まれる計測点の高さの平均値を算出することが好ましい。
【0021】
また本発明にかかる縦断プロファイルの作成方法は、
計測車に搭載されたレーザスキャナを用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データを取得する第1のステップと、
前記第1の三次元点群データを、前記計測車に搭載されたGPS受信機および慣性計測装置を用いて取得した前記計測車の位置および姿勢に関する情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成する第2のステップと、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、前記路面の凹凸を示す縦断プロファイルを作成する第3のステップと、を含むことを特徴とする。
【発明の効果】
【0022】
本発明の三次元レーザ計測システムを用いれば、計測車で移動しながら計測したデータに基づいて、キャリブレーションを必要とすることなく、高精度かつ長距離の道路の縦断プロファイルを作成できる。更に、高速道路において、通常の速度で運転しながら路面のデータを計測できるため、一回の計測で数百キロの区間の縦断プロファイルを作成することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の実施の形態にかかる三次元レーザ計測システムの機能的な構成を示すブロック図である。
【図2】図1の計測車のハードウェア資源の一例を示すブロック図である。
【図3】計測車による計測の様子を示す概念図である。
【図4】図1の縦断プロファイル作成装置のハードウェア資源の一例を示すブロック図である。
【図5】三次元点群データに基づいて路面の縦断プロファイルを作成する手順を示すフローチャートである。
【図6】計測車のタイヤの軌跡を上方から見た図である。
【図7】縦断プロファイルの作成手順を説明する図(その1)である。
【図8】縦断プロファイルの作成手順を説明する図(その2)である。
【図9】縦断プロファイルの作成手順を説明する図(その3)である。
【図10】縦断プロファイルの作成手順を説明する図(その4)である。
【図11】測定精度の検証区間の説明図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態にかかる三次元レーザ計測システムについて、図面を参照しながら説明する。
【0025】
図1は、本発明の実施の形態にかかる三次元レーザ計測システムの機能的な構成をブロックで示した図である。三次元レーザ計測システム1は、道路上を移動しながら必要なデータを収集する計測車2と、計測車2で収集されたデータに基づいて、路面の縦断プロファイルを作成する縦断プロファイル作成装置2とで構成されている。
【0026】
三次元レーザ計測システムの構成と機能について説明する前に、路面の縦断プロファイルを作成する際の基本的なステップを説明する。本発明では、以下の3段階のステップにより路面の縦断プロファイルを作成している。
【0027】
最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する(第1のステップ)。
【0028】
次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する(第2のステップ)。
【0029】
最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、路面の縦断プロファイルを作成する(第3のステップ)。
【0030】
<計測車の構成と機能>
次に、上記第1のステップを実現する計測車2の構成と機能について説明する。計測車2は、天板にレーザスキャナ21、GPS受信機22および慣性計測装置23が搭載されている。また計測車2は、レーザスキャナ21で取得した三次元点群データを記憶する第1点群データ記憶部24、ならびにGPS受信機22および慣性計測装置23で取得した計測データを記憶する計測データ記憶部25を備えている。
【0031】
図2は、計測車2のハードウェア資源の一例を示した図である。図1にブロックで示した計測車2の各機能は、図2に示したハードウェア資源を用いて実現される。計測車2は、プログラムを実行するCPU201を備えている。CPU201はバス202を介してROM203、RAM204、通信ボード205および磁気ディスク装置210と接続され、これらのハードウェアを制御する。通信ボード205は、有線または無線でLAN(Local Area Network)やインターネットなどのネットワークに接続されている。
【0032】
更にCPU201は、バス202を介してレーザスキャナ21、GPS受信機22および慣性計測装置23に接続され、これらのデバイスの動作を制御する。
【0033】
磁気ディスク装置240には、OS241、プログラム群242およびファイル群243が格納されている。プログラム群242のプログラムはCPU201により読み出されて実行される。ファイル群243には、レーザスキャナ21、GPS受信機22および慣性計測装置23で取得された各種のデータがファイルの形で格納される。なお、磁気ディスク装置240の代りに他の記憶装置(例えば、フラッシュメモリ)を用いてもよい。
【0034】
次に、図1および図3を用いて、レーザスキャナ21、GPS受信機22および慣性計測装置23の機能を説明する。図3は、計測車2による計測の様子を示す概念図である。計測車2の天板には、レーザスキャナ21、GPS受信機22および慣性計測装置23が固定した状態で搭載されている。また計測車2の下部にはタイヤ26が取り付けられている。
【0035】
レーザスキャナ21は、計測車2の天板に搭載された360度連続回転式のスキャン部211から所定の時間間隔でレーザパルスLPを発射し、レーザパルスLPがレーザ発射部分と対象物の間を往復する時間で道路4の路面までの距離を計測する。また、スキャナ211の取り付け角度と回転方向によって方向角を得ることができる。結果として、レーザが照射された各計測点Pの極座標で表された三次元座標を得ることができる。
【0036】
レーザスキャナ21は、対象点の座標群が特異性を持たないように、計測車2の天板の後部に、鉛直方向および水平方向の両方に対して角度をつけて取り付けられているため、路面において計測点Pが斜めのレーザ計測ラインTに沿って得られる。計測車2が道路上を走行することにより、レーザ計測ラインTは計測車2の走行方向に移動し路面の計測点Pの三次元データが連続して得られる。この三次元データは、平面位置と高さの座標をもっている。このようにして得られた計測点Pの三次元データの集まりである三次元点群データG1は、計測時刻と共に、第1点群データ記憶部24に記憶される。
【0037】
GPS受信機22は、複数のGPS(Global Positioning System)衛星のそれぞれから発信された測位信号の搬送波を観測し、この搬送波の観測情報に基づいて、GPS受信機22のアンテナ221の位置を、三次元座標で表された位置情報として取得する。
【0038】
慣性計測装置(通常、IMU“Inertial Measurement Unit”と呼ばれる)23は、運動を司る3軸の角度(または角速度)と加速度を計測する装置である。慣性計測装置23は、基本的に、3軸のジャイロと3方向の加速度計によって、三次元の角速度と加速度を求める。慣性計測装置23は、通常、搭載する移動体の重心位置に設置される。
【0039】
GPS受信機22で取得された位置情報のデータと慣性計測装置23で計測された角度(または角速度)と加速度のデータは、計測データ記憶部25に記憶される。
【0040】
<縦断プロファイル作成装置の構成と機能>
次に、上述の第2のステップと第3のステップを実現する縦断プロファイル作成装置3の構成と機能について説明する。縦断プロファイル作成装置3は、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35を備えている。また断面プロファイル作成装置3は作成されたデータを記憶する位置・姿勢データ記憶部32、第2点群データ記憶部34および縦断プロファイル記憶部36を備えている。
【0041】
図4は断面プロファイル作成装置3のハードウェア資源の一例を示した図である。図1にブロックで示した縦断プロファイル作成装置3の各機能は、図4に示したハードウェア資源を用いて実現される。
【0042】
縦断プロファイル作成装置3は、プログラムを実行するCPU301を備えている。CPU301はバス302を介してROM303、RAM304、ディスプレイ305、キーボード306、マウス307、通信ボード308、光ディスク装置309および磁気ディスク装置310と接続され、これらのハードウェアを制御する。なお、磁気ディスク装置310の代りに他の記憶装置(例えば、フラッシュメモリ)を用いてもよい。
【0043】
ディスプレイ305は出力機器の一例、キーボード306およびマウス307は入力機器の一例である。通信ボード308、光ディスク装置309および磁気ディスク装置310は、入力および出力を兼ねた機器の一例である。通信ボード305は、有線または無線でLANやインターネットなどのネットワークに接続されている。
【0044】
磁気ディスク装置310には、OS311、プログラム群312およびファイル群313が格納されている。プログラム群312には、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35の各機能を実現するプログラムが格納されている。プログラム群312のプログラムはCPU301により読み出されて実行される。ファイル群313には、位置・姿勢算出部31、データ修正部33および縦断プロファイル作成部35で作成された各種のデータがファイルの形で格納される。
【0045】
計測車2の第1点群データ記憶部24および計測データ記憶部25に格納された計測データは、ハードウェア資源の通信ボード205および308を介して、もしくはメモリーカード等を用いて計測車2の磁気ディスク装置210から読み出され、縦断プロファイル作成部35のデータ修正部33および位置・姿勢算出部31にそれぞれ転送される。
【0046】
<第2のステップの説明>
次に、縦断プロファイル作成装置3における処理について説明する。最初に、レーザスキャナ21で計測された第1の三次元点群データG1を修正して、直交する3軸で表される地理座標系の第2の三次元点群データG2に変換する手順(第2のステップ)を説明する。
【0047】
位置・姿勢算出部31は、各計測時刻における計測車2の位置および姿勢角を特定の座標系(本実施の形態では地理座標系)で算出する。位置・姿勢算出部31は、計測データ記憶部25から、GPS受信機22で取得した計測車2の緯度、経度および高さのデータ、ならびに慣性計測装置23で計測した角度(または角速度)および角加速度のデータを読み出し、これらのデータに基づいて、各時刻における計測車2の位置および姿勢角(ロール角、ピッチ角、ヨー角)を算出する。
【0048】
地理座標系は世界測地系でも任意座標のいずれでもよく、例えば、最初に観測した、任意の位置の路面のレーザ照射点を(x,y,z)=(0,0,0)としてもよい。算出された計測車2の位置および姿勢のデータは、位置・姿勢データ記憶部32に記憶される。
【0049】
データ修正部33は、計測車2の第1点群データ記憶部24からレーザスキャナ21で計測した第1の三次元点群データG1を読み出す。また位置・姿勢データ記憶部32から各時刻における計測車2の位置および姿勢のデータを読み出す。
【0050】
データ修正部33は、読み出したデータに基づいて各時刻における路面の地理座標系の第2の三次元点群データG2を作成する。極座標で表された第1の三次元点群データG1を、計測車2の位置および姿勢のデータに基づいて、地理座標系で表された第2の三次元点群データG2に変換する演算式は、例えば特開2009−204615号公報に記載されているように広く知られているため、ここでは説明を省略する。データ修正部33で作成された地理座標系の第2の三次元点群データG2は、第2点群データ記憶部34に記憶される。
【0051】
<第3のステップの説明>
次に、図5のフローチャートを参照して、地理座標系に変換された第2の三次元点群データG2に基づいて路面の縦断プロファイルを作成する手順(第3のステップ)を説明する。
【0052】
本発明の第3のステップでは、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて縦断プロファイルを作成する。
【0053】
具体的には、第3の三次元点群データG3から、平面位置の情報に基づいてタイヤの軌跡Twの一方の端の計測点を含む第4の三次元点群データG4を抽出する。更に、この第4の三次元点群データG4に基づいて、タイヤの軌跡Twにおける所定の間隔毎の中間点の平面位置を算出し、この中間点の平面位置および第3の三次元点群データG3に基づいて中間点の高さを算出している。
【0054】
このようにして得られたタイヤの軌跡Twにおける所定の間隔毎の中間点の高さのデータが縦断プロファイルとなる。以下、縦断プロファイルの作成手順について、具体的に説明する。
【0055】
図6に、計測車2のタイヤの軌跡を上方から見た状態を示す。なお、図には説明に必要な部材のみを表示している。斜線で示した幅Wの帯は、右後部のタイヤ26cの軌跡Twである。図の例では、GPS受信機22は計測車2の天板の後部中央に設置され、またタイヤ26a〜26dはGPS受信機22の基準点Oを通る中心線からそれぞれ所定の距離離して設置されている。
【0056】
縦断プロファイル作成部35は、第2点群データ記憶部34に格納された地理座標系の第2の三次元点群データG2から、中心線からの距離Lを目安として、右後方のタイヤ26cの軌跡Twに対応する幅Wの第3の三次元点群データG3を切り出す(ステップS1)。
【0057】
タイヤの軌跡Twは、タイヤの実際の軌跡である必要はなく、タイヤ26が設置された位置に対応する箇所(中心線から距離Lだけ離れた箇所)の幅のある部分のことをいう。また図では、タイヤの軌跡Twとして右後部のタイヤ26cの軌跡を示しているが、左後部のタイヤ26dの軌跡であってもよく、更には、右と左のそれぞれのタイヤの軌跡であってもよい。
【0058】
次に、切り出された軌跡Twの第3の三次元点群データG3から平面位置に関する情報を取り出し、この情報に基づいて計測車2のタイヤの走行方向を決定する方法について説明する。
【0059】
図7に、タイヤ26aの軌跡Twとして切り出された幅Wの第3の三次元点群データG3を、平面位置を示すx−y平面上に投影した状態を示す。図中、矢印は計測車2の走行方向を示している。図7に示すように、切り出された計測点Pのデータはレーザパルスの発射の特徴からほぼライン状に並び、始点から終点までで一本のラインTをなしている。
【0060】
縦断プロファイル作成部35は、タイヤの走行方向を決定するため、レーザ計測ラインTの始点と終点を抽出する。抽出方法は、隣接する2つの計測点を始点および終点とするベクトルの大きさと方向角の変化を利用して、一つのラインの終点から次のラインの始点に移動したことを座標計算で確認するものである。
【0061】
図8は、説明のため図7の点群データG3の一部を簡略化して示したものである。各計測点Pの位置は直交座標系(x,y)で表されている。計測時刻の順に計測点Pに符号を付し、計測点PnとPn+1を結ぶベクトルをanとすると、その間の距離、すなわちベクトルanの大きさは式(1)で表される。またベクトルanの方位角σnとベクトルan+1の方位角σn+1の変化量は式(2)で表される。
【0062】
【数1】
【0063】
上記式(1)および式(2)を利用して、レーザ計測ラインTの始点と終点を抽出できる。例えば、図8において点P4と点P5の距離は、点P3と点P4のような計測ラインT上の点群よりも大きくなる。またベクトルa4の方向角σ4もベクトルa3の方向角σ3に比べて反転に近く変化することから、点P4が計測ラインTの終点であることが分かる。
【0064】
同様に、点P7と点P8の距離は、点P6と点P7の距離よりも大きくなる。またベクトルa8の方向角σ8はベクトルa7の方向角σ7に比べて反転に近く変化することから、点P8が計測ラインTの始点であることが分かる。
【0065】
このように、ベクトルanの大きさおよび方向角の変化量が、共にあらかじめ設定した閾値を超えた場合には、その計測点(始点)がレーザ計測ラインTの終点であり、次の計測点(終点)がレーザ計測ラインTの始点であると判定できる。このようにして抽出した始点群または終点群を第4の三次元点群データG4(図9参照)としてメモリ(図4のRAM304)に記憶する(ステップ2)。
【0066】
上述の判定方法を用いれば、図8に斜線で囲まれた領域Sで示すように、レーザ計測時に路面の輝度の状況などで、本来取得できるべき範囲で計測点に欠点が発生しても、ベクトルの大きさの閾値をベクトルa4の大きさ、すなわち点P4と点P5との距離より大きく設定しておけば、レーザ計測ラインTの始点とは判定されない。この方法により、十分な精度でレーザ計測ラインTの始点と終点の抽出ができる。
【0067】
なお、本実施の形態では、第4の三次元点群データG4として終点群(P4、P7、・・・)を選択したが、始点群を選択してもよいことは云うまでもない。始点群を選択したときは、本質的な違いではないが、縦断プロファイルを作成する手順が終点群を選択した場合と若干異なってくる。
【0068】
図9に示すように、第4の三次元点群データG4の配列方向は計測車2のタイヤの走行方向に一致している。三次元点群データG4のうち任意の計測点aから所定の距離、本実施の形態では25cmを超える距離で、かつ最も25cmに近い走行方向にある計測点bを計算により探し出す。この二つの計測点aおよびbの座標から方向ベクトルVbを作成し、これを単位ベクトルに直す。更に、このようにして得た単位ベクトルから25cmの長さを持つベクトルVcを作成する(ステップS3)。図10に示すように、ベクトルVcの終点は、実際には計測点のデータとして取得していない仮想点cである。
【0069】
次に、ベクトルVcの仮想終点cを始点として、走行方向にベクトルVcと同じ大きさ、すなわち25cmの長さを持つベクトルを上述したのと同じ手順で作成する(ステップS4)。縦断プロファイルの作成対象区間が終了するまでこの処理を繰り返し行うことで(ステップS5においてNo)、曲線を含むタイヤの走行方向と走行距離に関する情報を得ることができる。
【0070】
次に、図10を参照して、計測車2の走行方向に沿って、IRI算出に必要となる25cm間隔で路面の凹凸を含む高さの情報を取得する方法について説明する。
【0071】
上述のステップS3およびS4で得られた走行方向のベクトルVcに対して、ベクトルの中点からベクトルVcと直交し、タイヤの軌跡の中心方向に向かうベクトルVdを作成する。このベクトルVdの終点を、タイヤの軌跡Twの中間点(本実施の形態では中点、すなわち幅Wの2分の1の点)とする。縦断プロファイル作成部35は、ベクトルVcの始点と終点の位置座標に基づいてベクトルVdの終点(タイヤの軌跡Twの中点)dの平面位置を示すx−y座標を算出する(ステップS6)。
【0072】
ベクトルVdの終点である中点dは、実際にはデータを計測していない仮想点であるため、高さの情報がない。このため、縦断プロファイル作成部35は、中点dの周辺の領域、具体的には中点dを中心に所定の半径を持った円Cdを想定し、その中にある実在する計測点Pのデータを前述の第3の三次元点群データG3から抽出する。
【0073】
このようにして得た円Cd内の実在点の高さの座標(z)の平均値を算出すると、中点dにおける高さの情報が得られる(ステップS7)。ステップS6およびS7において、縦断プロファイルの対象区間内の全ての中点dの水平位置の情報と高さの情報を算出すれば、IRI算出に必要となる道路の路面を25cm間隔で計測した縦断プロファイル(凹凸を含む高さ)のデータが得られる。
【0074】
実際に、クラス1のプロファイラで定義されている作業は、25cm毎に上述の仮想点dに標尺を立てて水準測量を行うというものであり、上述の計算によってこの作業を再現している。
【0075】
また計測車2で走行した縦断プロファイルの対象区間の開始点と終了点の間で、ステップS3およびS4の計算過程で得られたベクトルVcの総数に25cmを掛けると、タイヤの走行方向に沿った累積距離が得られる。
【0076】
なお、本実施の形態では、ベクトルVdの始点をベクトルVcの中点に設定したが、必ずしもベクトルVcの中点に設定する必要はない。例えば、ベクトルVcの始点または終点を始点として、タイヤの軌跡の中心方向に向かうベクトルを作成し、これをベクトルVdとしてもよい。
【0077】
また本実施の形態では、ベクトルVdの終点をタイヤの軌跡Twの中点に設定したが、必ずしも中点である必要はなく、タイヤの軌跡Twの端部から一定の距離だけ離れた中間点に設定してもよい。
【0078】
また本実施の形態では、高さの平均値を算出する周辺の領域を、仮想点である中点dから所定の半径の円で囲まれた領域としたが、必ずしも円である必要はない。例えば、データ抽出の容易さから、仮想点dを中心とする正方形で囲まれた領域としてもよい。
【0079】
<測定精度の検証>
本発明の三次元レーザ計測システムを用いて、図11に示すように道路幅員7.15m、延長50mの区間で路面の凹凸と走行距離を計測し、水準測量で実測した値と比較することにより測定精度を検証した。検証では、50m区間の道路両側をそれぞれ5等分し、10m間隔で計測点を設けて、実測と本発明の計測システムによる計測の結果を比較した。なお、本実施の形態では、レーザスキャナ21として、1秒間に30万点(300kHz)の計測を行うことができ、また点群の密度が4cmのスキャナを用いた。
【0080】
計測結果を表2に示す。各行には、計測点毎に、実測値、本発明の計測システムを用いて計測した高さ(z軸方向の値)、および実測値との誤差を示している。
【0081】
【表2】
【0082】
計測点1を互いの基準点とした場合、本発明の計測システムのよる計測の誤差は最大でも3mmであった。これは、本発明の計測システムにおける計測では、路面の凹凸のプロファイルを得る手段として、実測に相当する精度を確保できることを示している。
【0083】
以上説明したように、本発明の三次元レーザ計測システムでは、路面から得られた三次元の座標データに基づき、縦断プロファイルとして、車のタイヤの中心位置で、走行方向に連続して25cm間隔の凹凸のデータを得ることができる。IRIを計算する後工程は、このようにして作成した縦断プロファイルを用い、前述の“Proval”などの公知のプログラムを利用して容易に算出することができる。
【0084】
前述の表2に示した検証結果より明らかなように、レーザスキャナを用いて得た高さの座標が、直接水準測量の精度を十分に確保できていること、および計算のアルゴリズムが、直接水準測量の作業を再現していることなどから、本発明の三次元レーザ計測システムはクラス1のプロファイラに分類できるものである。
【0085】
また本発明の三次元レーザ計測システムを用いれば、高速道路においても低速走行することなくデータの収集ができるため、交通規制が不要であり、一日で数百キロの区間の計測を行うことも可能である。
【0086】
更に、本発明の三次元レーザ計測システムを用いれば、長距離の区間についても比較的短時間でクラス1のIRIを得ることができることから、従来のクラス2やクラス3のプロファイラの精度検証およびキャリブレーションに利用することが可能となる。
【符号の説明】
【0087】
1 三次元レーザ計測システム
2 計測車
3 縦断プロファイル作成装置
4 道路
21 レーザスキャナ
22 GPS受信機
23 慣性計測装置
24 第1点群データ記憶部
25 計測データ記憶部
26、26a〜26d タイヤ
31 位置・姿勢算出部
32 位置・姿勢データ記憶部
33 データ修正部
34 第2点群データ記憶部
35 縦断プロファイル作成部
36 縦断プロファイル記憶部
211 スキャン部
221 アンテナ
P 計測点
T レーザ計測ライン
LP レーザパルス
【特許請求の範囲】
【請求項1】
三次元座標で表された道路の路面の平面位置と高さを示す三次元点群データに基づいて路面の凹凸を示す縦断プロファイルを作成する三次元レーザ計測システムであって、
車体にレーザスキャナ、GPS受信機および慣性計測装置が搭載され、道路上を移動しながら、前記レーザスキャナを用いて路面の平面位置と高さを計測して第1の三次元点群データを取得し、前記GPS受信機および慣性計測装置を用いて前記車体の位置および姿勢に関する情報を取得する計測車(2)と、
前記レーザスキャナ、GPS受信機および慣性計測装置で取得されたデータに基づいて前記路面の縦断プロファイルを作成する縦断プロファイル作成装置と、を備え、
前記縦断プロファイル作成装置は、
前記レーザスキャナ(21)で取得した第1の三次元点群データを、前記GPS受信機および慣性計測装置で取得した情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成するデータ修正部と、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて前記縦断プロファイルを作成する縦断プロファイル作成部と、を有することを特徴とする三次元レーザ計測システム。
【請求項2】
前記縦断プロファイル作成部は、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出し、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出し、
前記中間点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出することを特徴とする、請求項1に記載の三次元レーザ計測システム。
【請求項3】
前記縦断プロファイル作成部は、前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項4】
前記縦断プロファイル作成部は、
前記第4の三次元点群データの平面位置の情報に基づいて、任意の計測点を始点とし、前記計測車の進行方向に向かう所定の大きさの第1のベクトルを作成し、
前記第1のベクトルの作成と同様の手順で、前記第1のベクトルの終点を始点とする同一の大きさの第2のベクトルを繰り返し作成し、
前記第1および第2のベクトルと直交する方向に前記中間点の平面位置を算出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項5】
前記縦断プロファイル作成部は、前記第4の三次元点群データのうち、前記任意の計測点から走行方向に向けて前記所定の大きさを越える位置にある計測点のうち最も近い計測点を選択し、この計測点を終点とするベクトルを作成し、そのベクトルの大きさを前記所定の大きさに変えて前記第1のベクトルを作成することを特徴とする、請求項4に記載の三次元レーザ計測システム。
【請求項6】
前記縦断プロファイル作成部は、前記第1のベクトルまたは第2のベクトルの中点からベクトルと直交し、かつ前記タイヤの軌跡の中心方向に向かう第4のベクトルを作成し、その終点を前記タイヤの軌跡の中点としたときの前記終点の位置を前記中間点とすることを特徴とする、請求項4または5に記載の三次元レーザ計測システム。
【請求項7】
前記縦断プロファイル作成部は、前記第3の三次元点群データから前記中間点の周辺の領域にある計測点の高さの情報を抽出し、その高さの平均値を算出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項8】
前記縦断プロファイル作成部は、前記中間点を中心とした所定の半径の円を描き、その円内に含まれる計測点の高さの平均値を算出することを特徴とする、請求項7に記載の三次元レーザ計測システム。
【請求項9】
計測車に搭載されたレーザスキャナを用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データを取得する第1のステップと、
前記第1の三次元点群データを、前記計測車に搭載されたGPS受信機および慣性計測装置を用いて取得した位置および姿勢に関する情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成する第2のステップと、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、前記路面の凹凸を示す縦断プロファイルを作成する第3のステップと、を含むことを特徴とする路面の縦断プロファイルの作成方法。
【請求項10】
前記第3のステップは更に、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出するステップと、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出するステップと、
前記中心点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出するステップと、を含むことを特徴とする、請求項9に記載の路面の縦断プロファイルの作成方法。
【請求項11】
前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することを特徴とする、請求項10に記載の路面の縦断プロファイルの作成方法。
【請求項1】
三次元座標で表された道路の路面の平面位置と高さを示す三次元点群データに基づいて路面の凹凸を示す縦断プロファイルを作成する三次元レーザ計測システムであって、
車体にレーザスキャナ、GPS受信機および慣性計測装置が搭載され、道路上を移動しながら、前記レーザスキャナを用いて路面の平面位置と高さを計測して第1の三次元点群データを取得し、前記GPS受信機および慣性計測装置を用いて前記車体の位置および姿勢に関する情報を取得する計測車(2)と、
前記レーザスキャナ、GPS受信機および慣性計測装置で取得されたデータに基づいて前記路面の縦断プロファイルを作成する縦断プロファイル作成装置と、を備え、
前記縦断プロファイル作成装置は、
前記レーザスキャナ(21)で取得した第1の三次元点群データを、前記GPS受信機および慣性計測装置で取得した情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成するデータ修正部と、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて前記縦断プロファイルを作成する縦断プロファイル作成部と、を有することを特徴とする三次元レーザ計測システム。
【請求項2】
前記縦断プロファイル作成部は、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出し、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出し、
前記中間点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出することを特徴とする、請求項1に記載の三次元レーザ計測システム。
【請求項3】
前記縦断プロファイル作成部は、前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項4】
前記縦断プロファイル作成部は、
前記第4の三次元点群データの平面位置の情報に基づいて、任意の計測点を始点とし、前記計測車の進行方向に向かう所定の大きさの第1のベクトルを作成し、
前記第1のベクトルの作成と同様の手順で、前記第1のベクトルの終点を始点とする同一の大きさの第2のベクトルを繰り返し作成し、
前記第1および第2のベクトルと直交する方向に前記中間点の平面位置を算出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項5】
前記縦断プロファイル作成部は、前記第4の三次元点群データのうち、前記任意の計測点から走行方向に向けて前記所定の大きさを越える位置にある計測点のうち最も近い計測点を選択し、この計測点を終点とするベクトルを作成し、そのベクトルの大きさを前記所定の大きさに変えて前記第1のベクトルを作成することを特徴とする、請求項4に記載の三次元レーザ計測システム。
【請求項6】
前記縦断プロファイル作成部は、前記第1のベクトルまたは第2のベクトルの中点からベクトルと直交し、かつ前記タイヤの軌跡の中心方向に向かう第4のベクトルを作成し、その終点を前記タイヤの軌跡の中点としたときの前記終点の位置を前記中間点とすることを特徴とする、請求項4または5に記載の三次元レーザ計測システム。
【請求項7】
前記縦断プロファイル作成部は、前記第3の三次元点群データから前記中間点の周辺の領域にある計測点の高さの情報を抽出し、その高さの平均値を算出することを特徴とする、請求項2に記載の三次元レーザ計測システム。
【請求項8】
前記縦断プロファイル作成部は、前記中間点を中心とした所定の半径の円を描き、その円内に含まれる計測点の高さの平均値を算出することを特徴とする、請求項7に記載の三次元レーザ計測システム。
【請求項9】
計測車に搭載されたレーザスキャナを用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データを取得する第1のステップと、
前記第1の三次元点群データを、前記計測車に搭載されたGPS受信機および慣性計測装置を用いて取得した位置および姿勢に関する情報に基づいて修正して、地理座標系で表示された第2の三次元点群データを作成する第2のステップと、
前記第2の三次元点群データから前記計測車のいずれかのタイヤの軌跡に対応する第3の三次元点群データを切り出し、この第3の三次元点群データに基づいて、前記路面の凹凸を示す縦断プロファイルを作成する第3のステップと、を含むことを特徴とする路面の縦断プロファイルの作成方法。
【請求項10】
前記第3のステップは更に、
前記第3の三次元点群データから、平面位置の情報に基づいて前記タイヤの軌跡の一方の端の計測点を含む第4の三次元点群データを抽出するステップと、
この第4の三次元点群データに基づいて、前記タイヤの軌跡における所定の間隔毎の中間点の平面位置を算出するステップと、
前記中心点の平面位置および前記第3の三次元点群データに基づいて、前記中間点の高さを算出するステップと、を含むことを特徴とする、請求項9に記載の路面の縦断プロファイルの作成方法。
【請求項11】
前記第3の三次元点群データのレーザ計測ライン毎の終点または始点のいずれかの計測点を前記タイヤの軌跡の一方の端の計測点として、前記第4の三次元点群データを抽出することを特徴とする、請求項10に記載の路面の縦断プロファイルの作成方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−113702(P2013−113702A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259818(P2011−259818)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(311011807)株式会社アスコ (1)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(311011807)株式会社アスコ (1)
【Fターム(参考)】
[ Back to top ]