
三次元変位測定装置
【課題】簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することを目的とする。
【解決手段】三次元変位測定装置は、ワイヤ3を巻回しているプーリを有し、ワイヤ3が引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するワイヤポテンショメータ2が、3個所定の周方向角度120°の間隔を取ってベースプレート11の上に取り付けられた三次元変位センサ1と、三次元変位センサ1の3個のワイヤポテンショメータ2からのそれぞれの出力信号を用いる。単に、3個のワイヤポテンショメータ2のワイヤ3の引き出し長さを計測するだけで、3本のワイヤ3で構成する三角錐の頂点の変位測定端5の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
【解決手段】三次元変位測定装置は、ワイヤ3を巻回しているプーリを有し、ワイヤ3が引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するワイヤポテンショメータ2が、3個所定の周方向角度120°の間隔を取ってベースプレート11の上に取り付けられた三次元変位センサ1と、三次元変位センサ1の3個のワイヤポテンショメータ2からのそれぞれの出力信号を用いる。単に、3個のワイヤポテンショメータ2のワイヤ3の引き出し長さを計測するだけで、3本のワイヤ3で構成する三角錐の頂点の変位測定端5の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三次元変位測定装置に関し、特に、ワイヤを巻回しているプーリと、ワイヤが引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するポテンショメータを用いた三次元変位測定装置に関する。
【背景技術】
【0002】
従来から2点間の相対変位を三次元座標で動的に測定するシステムとしては、超音波、光、レーザ光等を使用した非接触式のものが存在する。しかしながら、これらの計測システムは、高い精度が得られる一方、一般に高価であり、測定装置そのものの寸法も大きいものが多いという難点がある。
一方、従来から存在する接触型の変位計を組み合わせて変位を計測することも可能であったが、動的変位の検出が困難であったり、外形寸法上の制約で狭い場所には取り付けられなかったり、測定結果を三次元座標で得るために、取り付けの際の位置決めが難しい等の問題があった。
【0003】
この問題を解決するための三次元変位計測システムとして、特許文献1に記載の技術が開示されている。この三次元変位計測システムを構成する三次元変位検出ユニットは、そのセンサ本体を不動部に取り付け、被測定対象物の変位する測定点に測定子を取り付ける。この状態で測定子が測定点からからの振動や変位を受けると、測定子に自在継ぎ手を介して連結された連結ロッドが垂直軸を中心として第1の回転部材が回転するとともに、連結ロッドが水平軸を中心として第2の回転部材が回転する。また、連結ロッドも測定子の移動に伴って伸縮可能な構成となっている。第1の回転部材及び第2の回転部材のそれぞれの回転角は、個別に設けられた第1及び第2の角度検出器により検出される。連結ロッドの伸縮はワイヤの引き出される長さを回転角で検出する変位検出器によって検出される。
【0004】
そして、特許文献1には、前記した三次元変位検出ユニットを3台用い、3台の三次元変位検出ユニットから得られるそれぞれの第1、第2の角度検出器及び変位検出器からの信号をパーソナルコンピュータで解析して、XYZの三次元直交座標における変位、及びX軸、Y軸、Z軸周りの回転の6自由度三次元変位を計測する技術が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−315815号公報(図1〜図8参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された三次元変位検出ユニットの連結ロッドは、伸縮自在の剛性の高い部材で構成され、連結ロッドの測定子が設けられた側と反対側の基部側は、不動部に垂直軸、水平軸の周りに回転可能な構成で連結された構成となっている。
従って、被測定対象物の高速な振動による変位を高速で測定するには慣性が大きく、被測定対象物の変位に外乱を逆に与えたりすることになり、精度の良い変位の測定上問題があった。
【0007】
本発明は、前記した従来の課題を解決するものであり、簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、請求項1に記載の三次元変位測定装置は、ワイヤを巻回しているプーリを有し、ワイヤが引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するポテンショメータが、3個所定の周方向角度の間隔を取って一つの支持基板の上に取り付けられた三次元変位測定ユニットと、三次元変位測定ユニットの3個のポテンショメータからのそれぞれの出力信号を取得するポテンショメータ信号取得手段と、を備えたものであって、
測定者が入力可能な入力手段と、三次元変位測定ユニットの3個のポテンショメータのそれぞれワイヤの引き出し部分の先端部を1点で接合して変位測定端とし、3本のワイヤで三角錐を形成するようにし、変位測定端が、被測定対象物の所定の測定点に固定され、測定者による入力手段からの入力に従って、被測定対象物の所定の測定点の初期位置に対し、XYZの直角三次元座標系の各座標軸の向きを設定する座標軸設定手段と、測定者による入力手段からの入力に従って、3個のポテンショメータからの出力信号に基づいて被測定対象物の所定の測定点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量に換算する換算式を設定する換算式設定手段と、換算式設定手段により設定された換算式を用いて、3個のポテンショメータからの出力信号に基づいて、初期位置からの被測定対象物の所定の測定点の直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する測定点変位量算出手段と、を備えることを特徴とする。
【0009】
請求項1に記載の発明によれば、特許文献1に記載のような伸縮変位を検出する変位検出器を備えた伸縮自在な連結ロッドや、その基部側が垂直軸及び水平軸の周りに回転可能な構成として、第1及び第2の角度検出器を設けて垂直軸及び水平軸の周りの角度変位を検出するという複雑な構成とすることなく、単に、3個のポテンショメータのワイヤの引き出し長さを計測するだけで、3本のワイヤで構成する三角錐の頂点の変位測定端の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
従って、3本のワイヤの慣性は極めて小さく、被測定対象物の高速な振動変位を特許文献1のような技術よりも正確に測定できる。また、3個のポテンショメータを用いたものであり、本発明の三次元変位測定装置は、超音波、光、レーザ光等を使用した非接触式の従来のものより極めて安価に製造できる。
【0010】
請求項2に係わる発明の三次元変位測定装置は、請求項1に記載の発明の構成に加え、更に、三次元の立体の剛体と仮定できる被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点の初期位置に係わる設定された直角三次元座標系のX座標、Y座標、Z座標を、測定者による入力手段からの入力に従って設定する測定点座標設定手段と、設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量を求めたい被測定対象物の所定の着目点の初期位置に係わる設定された直角三次元座標系のX座標、Y座標、Z座標を、測定者による入力手段からの入力に従って設定する着目点座標設定手段と、設定された被測定対象物の所定の着目点のうちの、設定された少なくとも3箇所以上の被測定対象物の所定の測定点と異なるものに対して、設定された少なくとも3箇所以上の被測定対象物の所定の測定点との設定された直角三次元座標系のX座標、Y座標、Z座標の相対位置に基づいて、当該の着目点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する着目点変位量算出手段と、を備えることを特徴とする。
【0011】
請求項2に記載の発明によれば、被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点を設けて、それぞれ三次元変位測定ユニットで変位量を測定しているので、設定された直角三次元座標系のX方向、Y方向、Z方向の測定点における変位量が算出できる。また、少なくとも3箇所以上の被測定対象物の所定の測定点の直角三次元座標系のX座標、Y座標、Z座標を入力し、着目点の直角三次元座標系のX座標、Y座標、Z座標をも入力しているので、着目点変位量算出手段によって測定点と異なる着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量が、測定点と着目点との間の直角三次元座標系の相対位置関係と、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、算出することができる。
従って、被測定対象物の外形形状の関係で被測定対象物と干渉したり、被測定対象物に取り付けられて外部搭載品等と干渉したりして、測定点として選ぶことができない着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量を間接的に計算によって得ることが容易にできる。
【0012】
請求項3に係わる発明の三次元変位測定装置は、請求項2に記載の発明の構成に加え、被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、設定された直角三次元座標系のX軸は、エンジンの停止時のクランク軸の回転中心軸とし、Z軸は、X軸に垂直な垂直平面内に含まれたX軸に直交する垂直軸であり、Y軸は、垂直平面内に含まれたX軸及びZ軸に直交する水平軸であり、被測定対象物の所定の着目点とは、エンジン及び変速機が車体に支持される部位であり、着目点変位量算出手段は、少なくともエンジンの回転によるX軸周りのロール振動を考慮して、当該の着目点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出することを特徴とする。
【0013】
請求項3に記載の発明によれば、被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、設定された直角三次元座標系のX軸は、エンジンの停止時のクランク軸の回転中心軸であり、Z軸は、X軸に垂直な垂直平面内に含まれたX軸に直交する垂直軸であり、Y軸は、X軸及び垂直平面内に含まれたZ軸に直交する水平軸である。そして、直角三次元座標系のX軸、Y軸、Z軸の設定に基づいて、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、着目点変位量算出手段は、着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量と、少なくともX軸周り、つまり、クランク軸回りのエンジン及び変速機のロール振動による変位成分とを算出することができる。
【0014】
請求項4に係わる発明の三次元変位測定装置は、請求項3に記載の発明の構成に加え、設定された直角三次元座標系のY軸とZ軸とは、X軸に垂直であって、かつ、エンジン及び変速機が一体に結合されたものの重心点をその中に含む垂直平面内に設定され、着目点変位量算出手段は、被測定対象物の所定の着目点に対して、設定された直角三次元座標系の原点のX方向、Y方向、Z方向の並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することを特徴とする。
【0015】
請求項4に記載の発明によれば、設定された直角三次元座標系の原点が、エンジンのクランク軸の回転中心軸であるX軸と、エンジン及び変速機が一体に結合されたものの重心を含むX軸と垂直な垂直平面に含まれるX軸と直交する垂直軸がZ軸であり、X軸及び前記垂直平面に含まれるZ軸と直交する水平軸がY軸とで、定義されている。従って、着目点変位量算出手段において、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、原点のX方向、Y方向、Z方向の並進変位量の成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することができる。
【0016】
例えば、エンジン及び変速機が一体に結合されたものを、エンジンマウントを介して弾性的に振動吸収して車体により支持される支持受け部のエンジン運転状態における変位量を測定したい場合に、エンジン及び変速機の周辺に配置された機器、配管、計装線等によってその変位量を直接測定できないことがある。そのようなときは、当該の支持受け部を着目点とし、着目点変位量算出手段においてエンジンの運転状態における支持受け部の三次元の変位量が算出できる。そのとき、着目点変位量算出手段は、エンジンマウントに加わる、並進的な変位量成分だけでなく、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分をも算出することができ、エンジンマウントの耐久性試験の分析において、各エンジンマウントに加わる変位成分を考慮した改良方向の示唆を得ることができる。
【発明の効果】
【0017】
本発明によれば、簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することができる。
【図面の簡単な説明】
【0018】
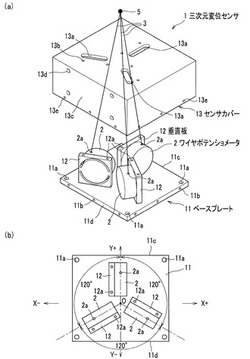
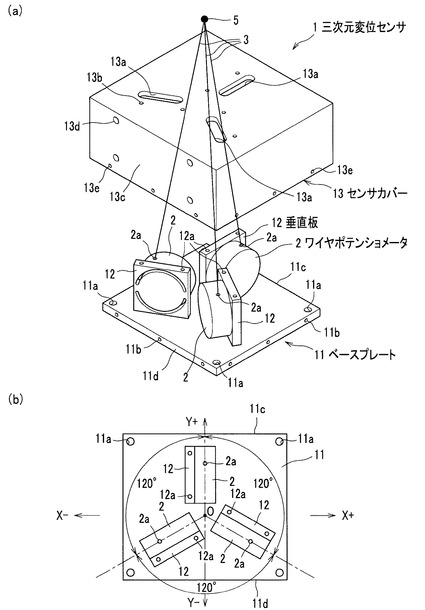
【図1】三次元変位センサの構成説明図であり、(a)は三次元変位センサのセンサカバーを外して、ベースプレート上への3個のワイヤポテンショメータの取り付け方を示した斜視図、(b)は、3個のワイヤポテンショメータをベースプレート上における周方向への取り付け方法を説明する上面図である。
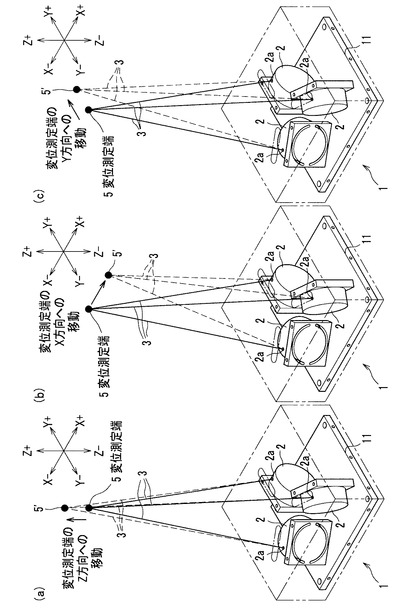
【図2】三次元変位センサにおける3本のワイヤの先端を結合した変位測定端のXYZ方向の動きに対するワイヤの引き出し量の変化の説明図であり、(a)は、変位測定端のZ方向への移動の場合の説明図、(b)は、変位測定端のX方向への移動の場合の説明図、(c)は、変位測定端のY方向への移動の場合の説明図である。
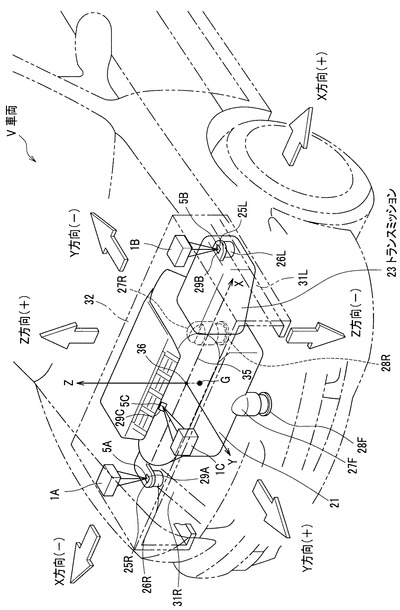
【図3】エンジン及びトランスミッションの結合体の振動変位を三次元変位センサ3個で測定する場合の三次元変位センサの設置例の説明図である。
【図4】三次元変位測定装置の機能ブロック構成図である。
【発明を実施するための形態】
【0019】
以下に、本発明の実施形態に係る三次元変位測定装置について図を参照しながら詳細に説明する。
【0020】
《三次元変位センサ》
図1を参照して本実施形態における三次元変位センサについて説明する。図1は、三次元変位センサの構成説明図であり、(a)は、三次元変位センサのセンサカバーを外して示した3個のワイヤポテンショメータのベースプレート上への取り付け方を示した斜視図、(b)は、3個のワイヤポテンショメータのベースプレート上における周方向への取り付け方法を説明する上面図である。
三次元変位センサ(三次元変位測定ユニット)1は、図1の(a),(b)に示すようにワイヤポテンショメータ(ポテンショメータ)2が金属板材で構成された垂直板12に固定されており、更に垂直板12の図1の下面側の図示しない固定用雌ねじ孔に、ベースプレート11の図示しないねじ孔を下面側から挿通させたねじでねじ嵌合して固定されている。このため、ベースプレート11の垂直板12取り付け用の図示しないねじ孔の下面側は、ねじ頭が下面側に突出しないで沈み込むように座ぐり孔を設けてある。
【0021】
ワイヤポテンショメータ2は、ワイヤポテンショメータ2のケース内に配置された図示しないプーリがワイヤ3を巻き取る構成になっており、このプーリに常にワイヤを巻き込む方向の復元力を付与する図示しない渦巻ばねが内蔵されている。そして、例えば、前記プーリと一体に回転する回転円盤に所定の周方向配列で永久磁石が配置され、その近傍にホール素子が配置され、ホール素子の信号がプーリの回転角を、つまり、ワイヤの引き出された長さを示すように構成されている。
【0022】
ワイヤポテンショメータ2は、図1の(b)に示すようにケースのワイヤ引き出し孔2aがベースプレート11の平面中心Oに対し、周方向に120度の間隔となるように垂直板12を介してねじ固定されている。そして、例えば、3個のワイヤポテンショメータ2の内の1つのワイヤポテンショメータ2のワイヤ引き出し孔2aが、図1の(b)に示すように平面中心Oからベースプレート11の特定の一辺11cに垂直に引いた線(図1の(a)では、Y+の矢印で示す)の方向に対応するように設定される。ここで、この特定の一辺11cを、以下では「基準辺11c」と称する。ちなみに、「基準辺11c」と称するのは、基準辺11cの示す方向が、後記するXYZの直角三次元座標系におけるX軸の方向を示すように設定すると、それを前提としたXYZの直角三次元座標系の各座標軸方向の設定の入力方法を前以って準備しておくことができ、XYZの直角三次元座標系の各座標軸方向の設定を簡単化できるからである。
また、後記するが、三次元変位センサ1が不動点である試験架台32(図3参照)の天井面にベースプレート11が固定され、ワイヤ3が下方側に引き出されたとき、XYZの直角座標系のX軸、Y軸は、例えば、図1の(b)に示すように設定され、Z軸は、紙面に向く方向がZ軸(+)方向とする。
【0023】
ベースプレート11は、例えば、長方形の板状であり、その四隅近傍に雌ねじを切られた取り付けねじ孔11aを有している。ベースプレート11は、図1の(b)に示すようにその板厚面にセンサカバー13を固定するための雌ねじ孔11bを複数有している。
【0024】
センサカバー13を、図1の(a)に示すようにベースプレート11の上側から被せ、ベースプレート11の雌ねじ孔11bに対応した位置に設けてあるセンサカバー13の下端側のねじ孔13eにセンサカバー13を固定するためのねじを挿通させ、雌ねじ孔11bにねじ嵌合させて、ベースプレート11にセンサカバー13が固定されている。
センサカバー13には、複数のねじ孔13bが3枚の垂直板12の上端面に2個設けられた固定用雌ねじ孔12aの位置に対応させて設けられており、センサカバー13の上側から垂直板12を固定するためのねじ(図示省略)が挿通されて、固定用雌ねじ孔12aにねじ嵌合すようになっている。
【0025】
ワイヤポテンショメータ2のワイヤ引き出し孔2aから引き出された3本のワイヤ3はそれぞれセンサカバー13に径方向外方側に長く延びた長孔のワイヤ引き出し孔13aを挿通させて、引き出されその先端が変位測定端5として一点で結合されている。ワイヤ引き出し孔13aの幅は、変位測定端5の変位に対してワイヤ引き出し孔13aの縁に摺動すること無いような大きさとすることが望ましい。
これは、被測定対象物に変位測定端5が取り付けられたときに、変位測定端5の変位に対し、3本のワイヤ3がワイヤ引き出し孔2aから変位測定端5までの間で直線となり、変位測定端5がワイヤ引き出し孔2aから直線的に延びて構成する三角錐の頂点となることが変位測定端5の変位測定の上で仮定されて後記する相関式が設定されるためである。
【0026】
なお、センサカバー13は基本的に図1の(a)に示すように上面側(天井側)が有底の四角筒形状であり、その側面の一つが、ベースプレート11の基準辺11cに対向する辺11dに対応した側面になっており、固定用側面13cを構成している。固定用側面13cの周縁部には、ベースプレート11とセンサカバー13とを固定するための前記したねじ孔13eと干渉しないように雌ねじを切られた取り付けねじ孔13dが設けられ、この取り付けねじ孔13dにねじ嵌合させて三次元変位センサ1を固定することが可能になっている。
【0027】
図2は、三次元変位センサにおける3本のワイヤの先端を結合した変位測定端のXYZ方向の動きに対するワイヤの引き出し量の変化の説明図であり、(a)は、変位測定端のZ方向への移動の場合の説明図、(b)は、変位測定端のX方向への移動の場合の説明図、(c)は、変位測定端のY方向への移動の場合の説明図である。
このように変位測定端5が初期位置から符号5’で示した位置に、それぞれZ方向、X方向、Y方向に移動しても、3箇所のワイヤ引き出し孔2aを頂点とする正三角形の底面とし、ワイヤ引き出し孔2aから直線的に変位測定端5に延びる3本のワイヤ3を稜線とした三角錐により、三角錐の稜線の長さ、つまり、ワイヤ引き出し孔2aからワイヤ3が引き出された量が分かれば、三角錐の頂点である変位測定端5の三角錐の底面の中心点からの三次元空間中の位置を一意に算出して決定できる。そして、三次元変位センサ1のベースプレート11の3箇所のワイヤ引き出し孔2aを頂点とする正三角形の底面の中心と平面中心O(図1の(b)参照)との相対位置関係は既知であるので、容易に平面中心Oからの変位測定端5の相対位置を三次元的に一意に計算で求めることができる。
【0028】
《三次元変位測定装置の全体構成》
次に、図3,4を参照しながら、三次元変位測定装置50について説明する。
図3は、エンジン及びトランスミッションの結合体の振動変位を三次元変位センサ3個で測定する場合の三次元変位センサの設置例の説明図である。
この例では、車両Vは、エンジン21を横置きする前輪駆動車両である。ここでは、エンジン21とトランスミッション(変速機)23とが一体に結合されたものを被測定対象物とし、エンジン21及びトランスミッション23は、車体の前部側面の左右のフレーム31L,31R上に設けたエンジンマウント26L,26Rで車両Vの左右で支持されるとともに、図示省略のサブフレーム上に設けたエンジンマウント28F,28Rでエンジン21の前後が支持される。
エンジン21は、エンジンマウント26R,28F,28Rで支持される支持受け部25R,27F,27Rを有し、トランスミッション23は、エンジンマウント26Lで支持される支持受け部25Lを有している。
【0029】
そして、各エンジンマウント26L,26R,28F,28Rにおけるエンジン21又はトランスミッション23の三次元変位量を測定し、そのエンジンマウント26L,26R,28F,28Rの耐久性試験等の解析に利用することが、この三次元変位測定装置50(図4参照)を用いてこの被測定対象物の三次元変位量を測定する目的である。そのために、左右のフレーム31L,31R上に、例えば、仮想線で示したほぼコの字形の枠体である試験架台32を溶接等で固定し、その天板の下面に3個の三次元変位センサ(三次元変位測定ユニット)1A,1B,1Cがねじ止め固定されている。ここで、三次元変位センサ1A,1B,1Cは、図1の三次元変位センサ1と同じものであるが、それを区別するため符号を1A,1B,1Cと変えてある。変位測定端5A,5B,5Cも、図1の三次元変位センサ1の変位測定端5と同じものであるが、それを区別するため符号を5A,5B,5Cと変えてある。
【0030】
三次元変位センサ1A,1Bは、試験架台32の天板に変位測定端5A,5Bがベースプレート11の平面中心O(図1参照)のほぼ垂直下になるようにベースプレート11(図1参照)の取り付けねじ孔11aを用いてねじ固定されている。変位測定端5Aは、支持受け部25Rの上面に固定されている。具体的には、例えば、変位測定端5Aを金属製の小片である取り付け部材(測定点)29Aに溶接又は接着固定し、更にその取り付け部材29Aを支持受け部25Rに溶接固定する。同様に変位測定端5Bは、トランスミッション23の支持受け部25Lの上面に取り付け部材(測定点)29Bを介して固定されている。
【0031】
エンジンマウント28F,28Rにおけるエンジン21の三次元変位量を測定しようとしてもエンジン21の上部の外形の出っ張りや、エンジン21に隣接する機器や配線等が邪魔になり直接測定できない。そこで、三次元変位センサ1Cの変位測定端5Cが、エンジン21の上部に取り付け部材(測定点)29Cを介して変位測定端5Aと同様の方法で固定される。このとき、三次元変位センサ1Cは、センサカバー13(図1参照)の固定用側面13cに設けられた取り付けねじ孔13dを用いて、試験架台32の天板に固定されている。つまり、三次元変位センサ1Cのベースプレート11の平面中心O(図1参照)の斜め下方(車両Vで見ると前方側の三次元変位センサ1Cの平面中心Oから手前下方)に変位測定端5Cが位置している。
ここで、取り付け部材29A,29B,29Cを取り付けられた部位が、特許請求の範囲に記載の「測定点」に対応する。その意味でエンジン21又はトランスミッション23に固定された取り付け部材29A,29B,29Cそのものを特許請求の範囲に記載の「測定点」としても良い。
【0032】
エンジン21及びトランスミッション23の結合体は、ほぼ剛体とみなすことができ、三次元変位センサ1A,1B,1Cにより変位測定端5A,5B,5Cの三次元変位量が測定できれば、エンジン21及びトランスミッション23の結合体の三次元変位量が分かるので、変位測定端5が取り付けられていない支持受け部27F,27Rの三次元変位量を計算によって求めることができる。
【0033】
ここで、エンジン21及びトランスミッション23の結合体の三次元変位量を算出するための直角座標系のXYZの座標軸の設定方法について説明する。例えば、X軸はエンジン21のクランク軸の回転中心軸35と一致させるようにし、エンジン21及びトランスミッション23の結合体の重心Gを含む垂直面がX軸と垂直に交わる点を直角座標系の座標原点(直角三次元座標系の原点)36とし、座標原点36から垂直にZ軸を、座標原点36からX軸及びZ軸に共に直角となるY軸を車両Vの前方水平方向に設定する。
そして、X軸周りの角度変位をロール振動と称し、Y軸周りの角度変位をピッチ振動と称し、Z軸周りの角度変位をヨー振動と称する。そして、三次元変位センサ1A,1B,1Cにより測定された変位測定端5A,5B,5Cの三次元変位量に基づいて、座標原点36の三次元並進振動、ロール振動、ピッチ振動及びヨー振動の成分を算出し、三次元変位量を直接測定することができない支持受け部27F,27Rの三次元変位量を算出する。
ここで支持受け部25L,25R,27F,27Rが特許請求の範囲に記載の「着目点」に対応する。従って、本実施形態では、支持受け部25L,25Rは、特許請求の範囲に記載の「測定点」でもあり、「着目点」でもある。
【0034】
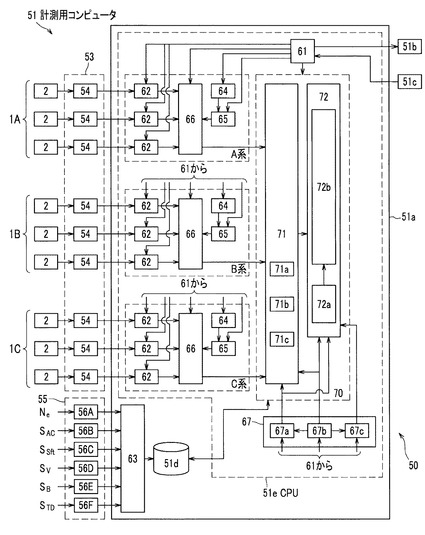
図4は、三次元変位測定装置の機能ブロック構成図である。図4に示すように三次元変位測定装置50は、三次元変位センサ1A,1B,1C、信号前処理装置53、計測用コンピュータ51から構成される。計測用コンピュータ51としては、普通の市販のノート型パーソナルコンピュータでも良い。計測用コンピュータ51は、コンピュータ本体51a、液晶表示装置等から構成された表示部51b、キーボード、マウス等の入力装置51c、ハードディスク装置等で構成された記憶部51d、CPU51e等を含んでおり、他に図示しないROM,RAMや、CPU51e,ROM,RAM、入出力インタフェース間を接続するバス等を含んでいる。
図1に示したように三次元変位センサ1A,1B,1Cは、それぞれ3個のワイヤポテンショメータ2を有しており、その中に内蔵されたホール素子からの出力信号が信号前処理装置53の個別の信号前処理回路54で、増幅及びA/D変換され、計測用コンピュータ51の入力インタフェースに入力される。
【0035】
そして、記憶部51dに予め格納された三次元変位測定プログラムをCPU51eが読み出して、実行する機能部として、制御部61、三次元変位センサ1A,1B,1Cに対応して1組のセットとして3つのワイヤ引き出し長さ演算部(ポテンショメータ信号取得手段)62、座標軸設定部(座標軸設定手段)64、換算式設定部(換算式設定手段)65及び三次元変位量演算部(測定点変位量算出手段)66、被測定対象物三次元座標設定部67、並びに被測定対象物三次元変位解析部70を含んでいる。その他にCPU51eが実行する機能部として、車両情報取得部63を含んでいる。
前記した1組のセットとしての3つのワイヤ引き出し長さ演算部62、座標軸設定部64、換算式設定部65及び三次元変位量演算部66は、図4に示すように三次元変位センサ1A,1B,1Cに対応してA系、B系、C系の3組用意されている。
【0036】
被測定対象物三次元座標設定部67は、座標原点設定部(測定点座標設定手段、着目点座標設定手段)67a、測定点座標設定部(測定点座標設定手段)67b、着目点座標設定部(着目点座標設定手段)67cを含んでいる。
被測定対象物三次元変位解析部70は、測定点三次元座標換算部(着目点変位量算出手段)71、着目点三次元座標変位演算部(着目点変位量算出手段)72を含んでいる。そして、着目点三次元座標変位演算部72は、被測定対象物三次元運動解析部72aと着目点三次元座標換算部72bから構成されている。ちなみに、測定点三次元座標換算部71は、前記したA〜C系に対応してA系測定点三次元座標換算部71a、B系測定点三次元座標換算部71b、C系測定点三次元座標換算部71cを含んでいる。
【0037】
(制御部と初期設定の機能)
制御部61は、初期設定の機能の一つ目として、三次元変位センサ1A,1B,1Cの設置条件に対応した各A〜C系の三次元変位量演算部66における直角三次元座標系におけるX,Y,Zの各座標軸方向(XYZ方向)の成分の三次元変位量を算出するために、A〜C系のそれぞれの座標軸設定部64においてX,Y,Zの各座標軸方向をそれぞれの座標軸方向に対する+−方向も含めて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする座標軸方向設定入力機能を有している。
【0038】
また、制御部61は、初期設定の機能の二つ目として、前記した座標軸方向設定入力機能の作業の終了後に、前記した座標軸方向設定入力機能の結果を用いてA〜C系の換算式設定部65に、それぞれの系に含まれる3つのワイヤ引き出し長さ演算部62の算出したワイヤポテンショメータ2の回転角を示す出力信号に基づくワイヤ引き出し長さにより、初期状態におけるワイヤ引き出し長さからのワイヤ引き出し長さの変化量をX,Y,Zの各座標軸方向の成分の三次元変位量として三次元変位量演算部66にて換算算出する際に用いる換算式の係数を、A〜C系のそれぞれの換算式設定部65において、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。
【0039】
そのため、制御部61は、A〜C系のそれぞれの座標軸設定部64、換算式設定部65と接続している。座標軸設定部64で設定されたX,Y,Z方向は、それぞれの方向に対する+−方向も含めて換算式設定部65に入力される。
ちなみに、X,Y,Z方向のそれぞれの方向に対する+−方向は、後記する座標原点設定部67aにおけるそれぞれの方向に対する+−方向と整合したものである。
A〜C系のそれぞれの換算式設定部65で設定された換算式の係数は、それぞれの系の三次元変位量演算部66に入力される。
なお、変位測定端5A,5B,5Cそれぞれに対して、換算式は個別に用意され、個々の三次元変位センサ1の3本のワイヤ3で構成する三角錐の稜線の長さから三角錐の頂点である変位測定端5A,5B,5Cのそれぞれの三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。しかし、変位測定端5A,5B,5Cのそれぞれの初期状態における三角錐の形状は異なるし、また、三次元変位センサ1の取り付け方向も異なる可能性があることからこの座標軸方向設定入力機能が必要になる。
【0040】
制御部61は、初期設定の機能の三つ目として、被測定対象物、ここでは、エンジン21及びトランスミッション23の結合体のXYZの直角三次元座標系における座標原点36と、X,Y,Z座標軸をその正負の方向も含めて設定するために、被測定対象物三次元座標設定部67の座標原点設定部67aにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、座標原点設定部67aと接続しており、座標原点設定部67aにおいて設定された座標原点36及び、その正負の方向も含んだX,Y,Z座標軸の方向は、測定点座標設定部67b、着目点座標設定部67c、測定点三次元座標換算部71、着目点三次元座標変位演算部72に入力される(図3参照)。
【0041】
これは、例えば、CADシステムで被測定対象物であるエンジン21及びトランスミッション23の結合体の重心Gを求めて、車載状態でのクランク軸の回転中心軸35をX軸と定め、重心Gを含む垂直面がX軸と垂直に交わる点を直角三次元座標の座標原点36とすることによって設定することとする。ここで、座標原点36から車体左方向をX方向(+)方向とし、座標原点36から車体右方向をX方向(−)方向とする。
そして、重心Gを含む垂直面内の座標原点36から水平方向に前後に延びるY座標軸を設定し、例えば、前方方向をY方向(+)とし、後方方向をY方向(−)方向とする。重心Gを含む垂直面内の座標原点36から鉛直方向に上下に延びるZ座標軸を設定し、例えば、上方方向をZ方向(+)とし、下方方向をZ方向(−)方向とする。
【0042】
制御部61は、初期設定の機能の四つ目として、被測定対象物の測定点(図3の取り付け部材29A,29B,29Cが対応)の初期位置の三次元座標を、測定点座標設定部67bにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、測定点座標設定部67bと接続しており、測定点座標設定部67bにおいて設定された取り付け部材29A(図3参照)の初期位置の三次元座標は、A系測定点三次元座標換算部71aに入力され、取り付け部材29B(図3参照)の初期位置の三次元座標は、B系測定点三次元座標換算部71bに入力され、取り付け部材29Cの初期位置の三次元座標は、C系測定点三次元座標換算部71cに入力されるとともに、測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標が着目点三次元座標変位演算部72に入力される。
取り付け部材29A,29B,29Cの三次元座標の入力設定は、CADシステムで前記した原点と、座標軸を設定することによって容易に算出され、測定者はそのデータを入力することで簡単に行える。
【0043】
制御部61は、初期設定の機能の五つ目として、被測定対象物の着目点(本実施形態では、支持受け部27F,27R)の初期位置の三次元座標を、測定点座標設定部67bにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、着目点座標設定部67cと接続している。
なお、測定点座標設定部67bから測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標が、着目点座標設定部67cに入力されているので、測定者による着目点の入力は、測定点と着目点が同じ部位であるものについては、その三次元座標を表示部51bの画面表示を見ながら入力装置51cでコピーして貼り付けることができる。
着目点座標設定部67cにおいて設定された着目点の初期位置の三次元座標は、着目点三次元座標変位演算部72に入力される。
着目点の三次元座標の入力設定は、CADシステムで前記した原点と、座標軸を設定することによって容易に算出され、測定者はそのデータを入力することで簡単に行える。
【0044】
制御部61による三次元変位センサ1A,1B,1CのX,Y,Zの各座標軸の方向(XYZ方向)をそれぞれの座標軸の方向に対する+−方向も含めた設定、三次元変位センサ1A,1B,1Cの出力信号に基づくXYZ方向の各成分の初期位置からの変位量算出用の換算式の設定、被測定対象物の直角座標系の座標原点36及び+−方向を含めたX,Y,Z方向の設定、測定点である取り付け部材29A,29B,29Cの三次元座標の設定、被測定対象物の着目点の三次元座標の設定が終了すると、初期設定の作業は終了する。その後、制御部61は、測定者によって表示部51bと入力装置51cを用いて、初期位置の記憶指令信号と測定開始の信号が入力されると、A〜C系の各ワイヤ引き出し長さ演算部62、三次元変位量演算部66、被測定対象物三次元変位解析部70に初期位置の記憶指令信号に続いて計測開始の指令信号を入力する。各ワイヤ引き出し長さ演算部62、三次元変位量演算部66、被測定対象物三次元変位解析部70は、初期位置の記憶指令信号を受けて、必要に応じて初期値をそれぞれ記憶し、計測開始の指令信号で、後記する演算を開始する。
【0045】
(ワイヤ引き出し長さ演算部)
ワイヤ引き出し長さ演算部62は、個々のワイヤポテンショメータ2からの出力信号が信号前処理回路54で増幅されデジタル信号に変換されたものを入力として、ワイヤポテンショメータ2の角度変位量を示す出力信号を、ワイヤ引き出し孔2aからのワイヤ引き出し量に換算し、三次元変位量演算部66に出力する。この演算は、公知のものであり省略する。ちなみに、本実施形態におけるワイヤポテンショメータ2のプーリは初期位置から伸び方向又は縮み方向にそれぞれほぼ90度回転する程度の変位量に対応するものであり、大きな変位量を想定したものではない。
【0046】
(三次元変位量演算部)
A〜Cの各系の三次元変位量演算部66は、制御部61からの初期位置の記憶指令信号を受信したときの3つのワイヤ引き出し長さ演算部62からのワイヤ引き出し量を初期位置とし、計測開始後の3つのワイヤ引き出し長さ演算部62からのワイヤ引き出し量に対するX,Y,Z方向それぞれの初期位置からの三次元変位量を、換算式設定部65から入力された換算式の係数を用いて、所定の周期で算出する。A〜Cの各系の三次元変位量演算部66で算出された三次元変位量は、測定点三次元座標換算部71の当該の系の測定点三次元座標換算部71a,71b,71cに入力される。
【0047】
(測定点三次元座標換算部)
測定点三次元座標換算部71のA〜C系の測定点三次元座標換算部71a,71b,71cは、初期位置の測定点の三次元座標に、A〜C系の各系の三次元変位量演算部66から入力された三次元変位量を加算して、測定点三次元座標の変化推移のデータとして、着目点三次元座標変位演算部72に入力する。
また、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータは、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
【0048】
(着目点三次元座標変位演算部)
着目点三次元座標変位演算部72は、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータと、測定点座標設定部67bから入力された測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標と、に基づいて、被測定対象物三次元運動解析部72aにおいて、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出する。被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、着目点三次元座標換算部72bに入力される。また、被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
【0049】
この被測定対象物三次元運動解析部72aにおける座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータに基づき容易に算出できる。
【0050】
着目点三次元座標換算部72bは、被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分と、取り付け部材29A,29B,29Cと異なる着目点(ここでは、図3の支持受け部27F,27Rが対応)の初期位置の三次元座標に基づいて、着目点である支持受け部27F,27RのX,Y,Z方向の三次元変位量を算出する。測定点ではない着目点である支持受け部27F,27Rの着目点三次元座標換算部72bで算出された三次元変位量は、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
この着目点である支持受け部27F,27RのX,Y,Z方向の三次元変位量は、支持受け部27F,27Rの初期位置の三次元座標と、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分とから容易に算出できる。
着目点であるとともに測定点でもある取り付け部材29A,29Bが取り付けられた支持受け部25L,25Rの三次元変位量は、A,B系の三次元変位量演算部66から被測定対象物三次元変位解析部70に入力されたものがそのまま用いられる。
【0051】
なお、本実施形態では、車両Vを車両試験装置であるロードシミュレータの上に載せて、例えば、駆動輪である前輪に対し各種の走行状態を与え、車両Vでは、エンジン21の回転速度や出力トルクを変えたり、トランスミッション23の変速段を変えたり、ブレーキ操作をして、車両走行状況を変化させて耐久試験を行い、三次元変位測定装置50は、車両走行状況に応じた被測定対象物であるエンジン21及びトランスミッション23の結合体の支持受け部25L,25R,27F,27Rの三次元変位量を測定する。そのために、計測用コンピュータ51は、入力インタフェース装置55に、例えば、車両Vのエンジン回転速度信号Ne、アクセル開度信号SAc、トランスミッション23のギアシフト位置信号SSft、駆動輪の車輪速信号SV、ブレーキの踏み込み量を示すブレーキ操作信号SB、ロードシミュレータ側で検出される駆動輪の駆動トルクを示す駆動トルク信号STD等の車両情報が入力され、それぞれの入力信号に応じた前処理回路56A,56B,56C,56D,56E,56Fを介して計測用コンピュータ51の入力インタフェースに入力され、車両情報取得部63で取得され、時刻データとともに記憶部51dに記憶格納される。
【0052】
測定が終了すると、測定者が表示部51b、入力装置51cを用いて計測の終了を制御部61に入力し、制御部61が、ワイヤ引き出し長さ演算部62、三次元変位量演算部66、測定点三次元座標換算部71、着目点三次元座標変位演算部72に測定終了の指令を出し、各演算機能や記憶部51dへのデータ格納を停止する。
【0053】
なお、耐久試験中に、制御部61は、表示部51bに、各測定点(取り付け部材29A,29B,29C)の三次元変位量の時系列変化、測定点に含まれない着目点(支持受け部27F,27R)の三次元変位量の時系列変化、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分の時系列変化のグラフを車両情報取得部63で取得された車両情報とともに表示するようにしても良い。
【0054】
本実施形態によれば、特許文献1に記載のような伸縮変位を検出する変位検出器を備えた伸縮自在な連結ロッドや、その基部側が垂直軸及び水平軸の周りに回転可能な構成として、第1及び第2の角度検出器を設けて垂直軸及び水平軸の周りの角度変位を検出するという複雑な構成とすることなく、単に、1箇所の測定点の三次元変位量の測定に対して、3個のワイヤポテンショメータ2のワイヤ3の引き出し長さを計測するだけで、3本のワイヤ3で構成する三角錐の頂点の変位測定端5の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
従って、3本のワイヤ3(図1参照)の慣性は極めて小さく、被測定対象物の高速な振動変位を特許文献1のような技術よりも正確に測定できる。また、3個のワイヤポテンショメータ2(図1参照)を用いたものであり、三次元変位測定装置50は、超音波、光、レーザ光等を使用した非接触式の従来のものより極めて安価に製造できる。
【0055】
また、図3に例示するように被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点(本実施形態では、取り付け部材29A,29B,29C)を設けて、それぞれ三次元変位センサ1(1A,1B,1C)で変位量を測定しているので、設定された直角三次元座標系のX方向、Y方向、Z方向の測定点における変位量が算出できる。また、少なくとも3箇所以上の被測定対象物の所定の測定点の初期位置の直角三次元座標系のX座標、Y座標、Z座標を入力し、着目点の初期位置の直角三次元座標系のX座標、Y座標、Z座標をも入力しているので、着目点三次元座標変位演算部72によって測定点と異なる着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量が、測定点と着目点との間の直角三次元座標系の相対位置関係と、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、算出することができる。
従って、被測定対象物の外形形状の関係で被測定対象物と干渉したり、被測定対象物に取り付けられた外部搭載品等(エンジン21及びトランスミッション23の周辺に配置された機器、配管、計装線等)と干渉したりして、測定点として選ぶことができない着目点(支持受け部27F,27R)の直角三次元座標系のX方向、Y方向、Z方向の変位量を間接的に計算によって得ることが容易にできる。
【0056】
本実施形態では被測定対象物は、図3に示すように車両Vのエンジン21及びトランスミッション23が一体に結合されたものである。そして、直角三次元座標系のX軸は、エンジン21の停止時のクランク軸の回転中心軸35とし、座標原点36は、X軸に垂直であって、かつ、エンジン21及びトランスミッション23が一体に結合されたものの重心点Gをその中に含む垂直平面とX軸との交点に設定されている。直角三次元座標系のZ軸は、X軸と座標原点36で直交する垂直軸であり、Y軸、X軸及びZ軸と座標原点36で直交する水平軸である。
従って、着目点三次元座標変位演算部72において、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、座標原点36のX方向、Y方向、Z方向の並進変位量の成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することができる。
【0057】
例えば、着目点をエンジン21及びトランスミッション23が一体に結合されたものを、エンジンマウント26L,26R,28F,28Rを介して弾性的に振動吸収して車体により支持される支持受け部25L,25R,27F,27Rのエンジン運転状態における変位量を測定したい場合に、エンジン21及びトランスミッション23の周辺に配置された機器、配管、計装線等によって支持受け部27F,27Rの変位量を直接測定できない。そのようなときは、その支持受け部27F,27Rを着目点とし、着目点三次元座標変位演算部72で、エンジンの運転状態における支持受け部27F,27Rの三次元の変位量が算出できる。そして、エンジンマウント28F,28Rに加わる三次元の変位量が算出できる。そのとき、並進的な変位量成分だけでなく、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動、それぞれの変位量成分をも算出することができ、エンジンマウント26L,26R,28F,28Rの耐久性試験の分析において、各エンジンマウント26L,26R,28F,28Rに加わる変位成分を考慮した改良方向の示唆を得ることができる。
【0058】
なお、本実施形態の三次元直角座標系のXYZ軸は、図3で示したように設定したが、それに限定されるものではなく、重心Gを直角三次元座標系の座標原点36とし、重心Gを通るクランク軸の回転中心軸に平行な軸をX軸とし、X軸に垂直な重心Gを含む平面内において車両の重心Gから水平に前方方向にY軸を取り、重心Gから鉛直上方にZ軸を設定するようにしても良い。
また、本実施形態の被測定対象物の例としてとして、車両Vのエンジン21及びトランスミッション23の結合体を横置き、前輪駆動方式としたが、それに限定されるものではない。
【符号の説明】
【0059】
1,1A,1B,1C 三次元変位センサ(三次元変位測定ユニット)
2 ワイヤポテンショメータ(ポテンショメータ)
2a ワイヤ引き出し孔
3 ワイヤ
5,5’,5A,5B,5C 変位測定端
11 ベースプレート
11a 取り付けねじ孔
11c 基準辺
13 センサカバー
13a ワイヤ引き出し孔
13c 固定用側面
13d 取り付けねじ孔
21 エンジン
23 トランスミッション(変速機)
25L,25R 支持受け部(測定点、着目点)
27F,27R 支持受け部(着目点)
26L,26R,28F,28R エンジンマウント
29A,29B,29C 取り付け部材(測定点)
31L,31R フレーム
32 試験架台
35 クランク軸の回転中心軸
36 座標原点(直角三次元座標系の原点)
50 三次元変位測定装置
51 計測用コンピュータ
51a コンピュータ本体
51b 表示部(入力手段)
51c 入力装置(入力手段)
51d 記憶部
62 ワイヤ引き出し長さ演算部(ポテンショメータ信号取得手段)
63 車両情報取得部
64 座標軸設定部(座標軸設定手段)
65 換算式設定部(換算式設定手段)
66 三次元変位量演算部(測定点変位量算出手段)
67 被測定対象物三次元座標設定部
67a 座標原点設定部(測定点座標設定手段、着目点座標設定手段)
67b 測定点座標設定部(測定点座標設定手段)
67c 着目点座標設定部(着目点座標設定手段)
70 被測定対象物三次元変位解析部
71 測定点三次元座標換算部(着目点変位量算出手段)
71a A系測定点三次元座標換算部
71b B系測定点三次元座標換算部
71a C系測定点三次元座標換算部
72 着目点三次元座標変位演算部(着目点変位量算出手段)
72a 被測定対象物三次元運動解析部
72b 着目点三次元座標換算部
G 重心
O 平面中心
V 車両
【技術分野】
【0001】
本発明は、三次元変位測定装置に関し、特に、ワイヤを巻回しているプーリと、ワイヤが引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するポテンショメータを用いた三次元変位測定装置に関する。
【背景技術】
【0002】
従来から2点間の相対変位を三次元座標で動的に測定するシステムとしては、超音波、光、レーザ光等を使用した非接触式のものが存在する。しかしながら、これらの計測システムは、高い精度が得られる一方、一般に高価であり、測定装置そのものの寸法も大きいものが多いという難点がある。
一方、従来から存在する接触型の変位計を組み合わせて変位を計測することも可能であったが、動的変位の検出が困難であったり、外形寸法上の制約で狭い場所には取り付けられなかったり、測定結果を三次元座標で得るために、取り付けの際の位置決めが難しい等の問題があった。
【0003】
この問題を解決するための三次元変位計測システムとして、特許文献1に記載の技術が開示されている。この三次元変位計測システムを構成する三次元変位検出ユニットは、そのセンサ本体を不動部に取り付け、被測定対象物の変位する測定点に測定子を取り付ける。この状態で測定子が測定点からからの振動や変位を受けると、測定子に自在継ぎ手を介して連結された連結ロッドが垂直軸を中心として第1の回転部材が回転するとともに、連結ロッドが水平軸を中心として第2の回転部材が回転する。また、連結ロッドも測定子の移動に伴って伸縮可能な構成となっている。第1の回転部材及び第2の回転部材のそれぞれの回転角は、個別に設けられた第1及び第2の角度検出器により検出される。連結ロッドの伸縮はワイヤの引き出される長さを回転角で検出する変位検出器によって検出される。
【0004】
そして、特許文献1には、前記した三次元変位検出ユニットを3台用い、3台の三次元変位検出ユニットから得られるそれぞれの第1、第2の角度検出器及び変位検出器からの信号をパーソナルコンピュータで解析して、XYZの三次元直交座標における変位、及びX軸、Y軸、Z軸周りの回転の6自由度三次元変位を計測する技術が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−315815号公報(図1〜図8参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された三次元変位検出ユニットの連結ロッドは、伸縮自在の剛性の高い部材で構成され、連結ロッドの測定子が設けられた側と反対側の基部側は、不動部に垂直軸、水平軸の周りに回転可能な構成で連結された構成となっている。
従って、被測定対象物の高速な振動による変位を高速で測定するには慣性が大きく、被測定対象物の変位に外乱を逆に与えたりすることになり、精度の良い変位の測定上問題があった。
【0007】
本発明は、前記した従来の課題を解決するものであり、簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、請求項1に記載の三次元変位測定装置は、ワイヤを巻回しているプーリを有し、ワイヤが引き出されることによって回転するプーリの回転角に基づいて引き出されたワイヤの長さを検出するポテンショメータが、3個所定の周方向角度の間隔を取って一つの支持基板の上に取り付けられた三次元変位測定ユニットと、三次元変位測定ユニットの3個のポテンショメータからのそれぞれの出力信号を取得するポテンショメータ信号取得手段と、を備えたものであって、
測定者が入力可能な入力手段と、三次元変位測定ユニットの3個のポテンショメータのそれぞれワイヤの引き出し部分の先端部を1点で接合して変位測定端とし、3本のワイヤで三角錐を形成するようにし、変位測定端が、被測定対象物の所定の測定点に固定され、測定者による入力手段からの入力に従って、被測定対象物の所定の測定点の初期位置に対し、XYZの直角三次元座標系の各座標軸の向きを設定する座標軸設定手段と、測定者による入力手段からの入力に従って、3個のポテンショメータからの出力信号に基づいて被測定対象物の所定の測定点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量に換算する換算式を設定する換算式設定手段と、換算式設定手段により設定された換算式を用いて、3個のポテンショメータからの出力信号に基づいて、初期位置からの被測定対象物の所定の測定点の直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する測定点変位量算出手段と、を備えることを特徴とする。
【0009】
請求項1に記載の発明によれば、特許文献1に記載のような伸縮変位を検出する変位検出器を備えた伸縮自在な連結ロッドや、その基部側が垂直軸及び水平軸の周りに回転可能な構成として、第1及び第2の角度検出器を設けて垂直軸及び水平軸の周りの角度変位を検出するという複雑な構成とすることなく、単に、3個のポテンショメータのワイヤの引き出し長さを計測するだけで、3本のワイヤで構成する三角錐の頂点の変位測定端の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
従って、3本のワイヤの慣性は極めて小さく、被測定対象物の高速な振動変位を特許文献1のような技術よりも正確に測定できる。また、3個のポテンショメータを用いたものであり、本発明の三次元変位測定装置は、超音波、光、レーザ光等を使用した非接触式の従来のものより極めて安価に製造できる。
【0010】
請求項2に係わる発明の三次元変位測定装置は、請求項1に記載の発明の構成に加え、更に、三次元の立体の剛体と仮定できる被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点の初期位置に係わる設定された直角三次元座標系のX座標、Y座標、Z座標を、測定者による入力手段からの入力に従って設定する測定点座標設定手段と、設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量を求めたい被測定対象物の所定の着目点の初期位置に係わる設定された直角三次元座標系のX座標、Y座標、Z座標を、測定者による入力手段からの入力に従って設定する着目点座標設定手段と、設定された被測定対象物の所定の着目点のうちの、設定された少なくとも3箇所以上の被測定対象物の所定の測定点と異なるものに対して、設定された少なくとも3箇所以上の被測定対象物の所定の測定点との設定された直角三次元座標系のX座標、Y座標、Z座標の相対位置に基づいて、当該の着目点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する着目点変位量算出手段と、を備えることを特徴とする。
【0011】
請求項2に記載の発明によれば、被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点を設けて、それぞれ三次元変位測定ユニットで変位量を測定しているので、設定された直角三次元座標系のX方向、Y方向、Z方向の測定点における変位量が算出できる。また、少なくとも3箇所以上の被測定対象物の所定の測定点の直角三次元座標系のX座標、Y座標、Z座標を入力し、着目点の直角三次元座標系のX座標、Y座標、Z座標をも入力しているので、着目点変位量算出手段によって測定点と異なる着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量が、測定点と着目点との間の直角三次元座標系の相対位置関係と、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、算出することができる。
従って、被測定対象物の外形形状の関係で被測定対象物と干渉したり、被測定対象物に取り付けられて外部搭載品等と干渉したりして、測定点として選ぶことができない着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量を間接的に計算によって得ることが容易にできる。
【0012】
請求項3に係わる発明の三次元変位測定装置は、請求項2に記載の発明の構成に加え、被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、設定された直角三次元座標系のX軸は、エンジンの停止時のクランク軸の回転中心軸とし、Z軸は、X軸に垂直な垂直平面内に含まれたX軸に直交する垂直軸であり、Y軸は、垂直平面内に含まれたX軸及びZ軸に直交する水平軸であり、被測定対象物の所定の着目点とは、エンジン及び変速機が車体に支持される部位であり、着目点変位量算出手段は、少なくともエンジンの回転によるX軸周りのロール振動を考慮して、当該の着目点の初期位置からの設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出することを特徴とする。
【0013】
請求項3に記載の発明によれば、被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、設定された直角三次元座標系のX軸は、エンジンの停止時のクランク軸の回転中心軸であり、Z軸は、X軸に垂直な垂直平面内に含まれたX軸に直交する垂直軸であり、Y軸は、X軸及び垂直平面内に含まれたZ軸に直交する水平軸である。そして、直角三次元座標系のX軸、Y軸、Z軸の設定に基づいて、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、着目点変位量算出手段は、着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量と、少なくともX軸周り、つまり、クランク軸回りのエンジン及び変速機のロール振動による変位成分とを算出することができる。
【0014】
請求項4に係わる発明の三次元変位測定装置は、請求項3に記載の発明の構成に加え、設定された直角三次元座標系のY軸とZ軸とは、X軸に垂直であって、かつ、エンジン及び変速機が一体に結合されたものの重心点をその中に含む垂直平面内に設定され、着目点変位量算出手段は、被測定対象物の所定の着目点に対して、設定された直角三次元座標系の原点のX方向、Y方向、Z方向の並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することを特徴とする。
【0015】
請求項4に記載の発明によれば、設定された直角三次元座標系の原点が、エンジンのクランク軸の回転中心軸であるX軸と、エンジン及び変速機が一体に結合されたものの重心を含むX軸と垂直な垂直平面に含まれるX軸と直交する垂直軸がZ軸であり、X軸及び前記垂直平面に含まれるZ軸と直交する水平軸がY軸とで、定義されている。従って、着目点変位量算出手段において、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、原点のX方向、Y方向、Z方向の並進変位量の成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することができる。
【0016】
例えば、エンジン及び変速機が一体に結合されたものを、エンジンマウントを介して弾性的に振動吸収して車体により支持される支持受け部のエンジン運転状態における変位量を測定したい場合に、エンジン及び変速機の周辺に配置された機器、配管、計装線等によってその変位量を直接測定できないことがある。そのようなときは、当該の支持受け部を着目点とし、着目点変位量算出手段においてエンジンの運転状態における支持受け部の三次元の変位量が算出できる。そのとき、着目点変位量算出手段は、エンジンマウントに加わる、並進的な変位量成分だけでなく、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分をも算出することができ、エンジンマウントの耐久性試験の分析において、各エンジンマウントに加わる変位成分を考慮した改良方向の示唆を得ることができる。
【発明の効果】
【0017】
本発明によれば、簡単な構造の三次元変位測定ユニットを用いて、精度の良い変位の計測を可能とする三次元変位測定装置を提供することができる。
【図面の簡単な説明】
【0018】
【図1】三次元変位センサの構成説明図であり、(a)は三次元変位センサのセンサカバーを外して、ベースプレート上への3個のワイヤポテンショメータの取り付け方を示した斜視図、(b)は、3個のワイヤポテンショメータをベースプレート上における周方向への取り付け方法を説明する上面図である。
【図2】三次元変位センサにおける3本のワイヤの先端を結合した変位測定端のXYZ方向の動きに対するワイヤの引き出し量の変化の説明図であり、(a)は、変位測定端のZ方向への移動の場合の説明図、(b)は、変位測定端のX方向への移動の場合の説明図、(c)は、変位測定端のY方向への移動の場合の説明図である。
【図3】エンジン及びトランスミッションの結合体の振動変位を三次元変位センサ3個で測定する場合の三次元変位センサの設置例の説明図である。
【図4】三次元変位測定装置の機能ブロック構成図である。
【発明を実施するための形態】
【0019】
以下に、本発明の実施形態に係る三次元変位測定装置について図を参照しながら詳細に説明する。
【0020】
《三次元変位センサ》
図1を参照して本実施形態における三次元変位センサについて説明する。図1は、三次元変位センサの構成説明図であり、(a)は、三次元変位センサのセンサカバーを外して示した3個のワイヤポテンショメータのベースプレート上への取り付け方を示した斜視図、(b)は、3個のワイヤポテンショメータのベースプレート上における周方向への取り付け方法を説明する上面図である。
三次元変位センサ(三次元変位測定ユニット)1は、図1の(a),(b)に示すようにワイヤポテンショメータ(ポテンショメータ)2が金属板材で構成された垂直板12に固定されており、更に垂直板12の図1の下面側の図示しない固定用雌ねじ孔に、ベースプレート11の図示しないねじ孔を下面側から挿通させたねじでねじ嵌合して固定されている。このため、ベースプレート11の垂直板12取り付け用の図示しないねじ孔の下面側は、ねじ頭が下面側に突出しないで沈み込むように座ぐり孔を設けてある。
【0021】
ワイヤポテンショメータ2は、ワイヤポテンショメータ2のケース内に配置された図示しないプーリがワイヤ3を巻き取る構成になっており、このプーリに常にワイヤを巻き込む方向の復元力を付与する図示しない渦巻ばねが内蔵されている。そして、例えば、前記プーリと一体に回転する回転円盤に所定の周方向配列で永久磁石が配置され、その近傍にホール素子が配置され、ホール素子の信号がプーリの回転角を、つまり、ワイヤの引き出された長さを示すように構成されている。
【0022】
ワイヤポテンショメータ2は、図1の(b)に示すようにケースのワイヤ引き出し孔2aがベースプレート11の平面中心Oに対し、周方向に120度の間隔となるように垂直板12を介してねじ固定されている。そして、例えば、3個のワイヤポテンショメータ2の内の1つのワイヤポテンショメータ2のワイヤ引き出し孔2aが、図1の(b)に示すように平面中心Oからベースプレート11の特定の一辺11cに垂直に引いた線(図1の(a)では、Y+の矢印で示す)の方向に対応するように設定される。ここで、この特定の一辺11cを、以下では「基準辺11c」と称する。ちなみに、「基準辺11c」と称するのは、基準辺11cの示す方向が、後記するXYZの直角三次元座標系におけるX軸の方向を示すように設定すると、それを前提としたXYZの直角三次元座標系の各座標軸方向の設定の入力方法を前以って準備しておくことができ、XYZの直角三次元座標系の各座標軸方向の設定を簡単化できるからである。
また、後記するが、三次元変位センサ1が不動点である試験架台32(図3参照)の天井面にベースプレート11が固定され、ワイヤ3が下方側に引き出されたとき、XYZの直角座標系のX軸、Y軸は、例えば、図1の(b)に示すように設定され、Z軸は、紙面に向く方向がZ軸(+)方向とする。
【0023】
ベースプレート11は、例えば、長方形の板状であり、その四隅近傍に雌ねじを切られた取り付けねじ孔11aを有している。ベースプレート11は、図1の(b)に示すようにその板厚面にセンサカバー13を固定するための雌ねじ孔11bを複数有している。
【0024】
センサカバー13を、図1の(a)に示すようにベースプレート11の上側から被せ、ベースプレート11の雌ねじ孔11bに対応した位置に設けてあるセンサカバー13の下端側のねじ孔13eにセンサカバー13を固定するためのねじを挿通させ、雌ねじ孔11bにねじ嵌合させて、ベースプレート11にセンサカバー13が固定されている。
センサカバー13には、複数のねじ孔13bが3枚の垂直板12の上端面に2個設けられた固定用雌ねじ孔12aの位置に対応させて設けられており、センサカバー13の上側から垂直板12を固定するためのねじ(図示省略)が挿通されて、固定用雌ねじ孔12aにねじ嵌合すようになっている。
【0025】
ワイヤポテンショメータ2のワイヤ引き出し孔2aから引き出された3本のワイヤ3はそれぞれセンサカバー13に径方向外方側に長く延びた長孔のワイヤ引き出し孔13aを挿通させて、引き出されその先端が変位測定端5として一点で結合されている。ワイヤ引き出し孔13aの幅は、変位測定端5の変位に対してワイヤ引き出し孔13aの縁に摺動すること無いような大きさとすることが望ましい。
これは、被測定対象物に変位測定端5が取り付けられたときに、変位測定端5の変位に対し、3本のワイヤ3がワイヤ引き出し孔2aから変位測定端5までの間で直線となり、変位測定端5がワイヤ引き出し孔2aから直線的に延びて構成する三角錐の頂点となることが変位測定端5の変位測定の上で仮定されて後記する相関式が設定されるためである。
【0026】
なお、センサカバー13は基本的に図1の(a)に示すように上面側(天井側)が有底の四角筒形状であり、その側面の一つが、ベースプレート11の基準辺11cに対向する辺11dに対応した側面になっており、固定用側面13cを構成している。固定用側面13cの周縁部には、ベースプレート11とセンサカバー13とを固定するための前記したねじ孔13eと干渉しないように雌ねじを切られた取り付けねじ孔13dが設けられ、この取り付けねじ孔13dにねじ嵌合させて三次元変位センサ1を固定することが可能になっている。
【0027】
図2は、三次元変位センサにおける3本のワイヤの先端を結合した変位測定端のXYZ方向の動きに対するワイヤの引き出し量の変化の説明図であり、(a)は、変位測定端のZ方向への移動の場合の説明図、(b)は、変位測定端のX方向への移動の場合の説明図、(c)は、変位測定端のY方向への移動の場合の説明図である。
このように変位測定端5が初期位置から符号5’で示した位置に、それぞれZ方向、X方向、Y方向に移動しても、3箇所のワイヤ引き出し孔2aを頂点とする正三角形の底面とし、ワイヤ引き出し孔2aから直線的に変位測定端5に延びる3本のワイヤ3を稜線とした三角錐により、三角錐の稜線の長さ、つまり、ワイヤ引き出し孔2aからワイヤ3が引き出された量が分かれば、三角錐の頂点である変位測定端5の三角錐の底面の中心点からの三次元空間中の位置を一意に算出して決定できる。そして、三次元変位センサ1のベースプレート11の3箇所のワイヤ引き出し孔2aを頂点とする正三角形の底面の中心と平面中心O(図1の(b)参照)との相対位置関係は既知であるので、容易に平面中心Oからの変位測定端5の相対位置を三次元的に一意に計算で求めることができる。
【0028】
《三次元変位測定装置の全体構成》
次に、図3,4を参照しながら、三次元変位測定装置50について説明する。
図3は、エンジン及びトランスミッションの結合体の振動変位を三次元変位センサ3個で測定する場合の三次元変位センサの設置例の説明図である。
この例では、車両Vは、エンジン21を横置きする前輪駆動車両である。ここでは、エンジン21とトランスミッション(変速機)23とが一体に結合されたものを被測定対象物とし、エンジン21及びトランスミッション23は、車体の前部側面の左右のフレーム31L,31R上に設けたエンジンマウント26L,26Rで車両Vの左右で支持されるとともに、図示省略のサブフレーム上に設けたエンジンマウント28F,28Rでエンジン21の前後が支持される。
エンジン21は、エンジンマウント26R,28F,28Rで支持される支持受け部25R,27F,27Rを有し、トランスミッション23は、エンジンマウント26Lで支持される支持受け部25Lを有している。
【0029】
そして、各エンジンマウント26L,26R,28F,28Rにおけるエンジン21又はトランスミッション23の三次元変位量を測定し、そのエンジンマウント26L,26R,28F,28Rの耐久性試験等の解析に利用することが、この三次元変位測定装置50(図4参照)を用いてこの被測定対象物の三次元変位量を測定する目的である。そのために、左右のフレーム31L,31R上に、例えば、仮想線で示したほぼコの字形の枠体である試験架台32を溶接等で固定し、その天板の下面に3個の三次元変位センサ(三次元変位測定ユニット)1A,1B,1Cがねじ止め固定されている。ここで、三次元変位センサ1A,1B,1Cは、図1の三次元変位センサ1と同じものであるが、それを区別するため符号を1A,1B,1Cと変えてある。変位測定端5A,5B,5Cも、図1の三次元変位センサ1の変位測定端5と同じものであるが、それを区別するため符号を5A,5B,5Cと変えてある。
【0030】
三次元変位センサ1A,1Bは、試験架台32の天板に変位測定端5A,5Bがベースプレート11の平面中心O(図1参照)のほぼ垂直下になるようにベースプレート11(図1参照)の取り付けねじ孔11aを用いてねじ固定されている。変位測定端5Aは、支持受け部25Rの上面に固定されている。具体的には、例えば、変位測定端5Aを金属製の小片である取り付け部材(測定点)29Aに溶接又は接着固定し、更にその取り付け部材29Aを支持受け部25Rに溶接固定する。同様に変位測定端5Bは、トランスミッション23の支持受け部25Lの上面に取り付け部材(測定点)29Bを介して固定されている。
【0031】
エンジンマウント28F,28Rにおけるエンジン21の三次元変位量を測定しようとしてもエンジン21の上部の外形の出っ張りや、エンジン21に隣接する機器や配線等が邪魔になり直接測定できない。そこで、三次元変位センサ1Cの変位測定端5Cが、エンジン21の上部に取り付け部材(測定点)29Cを介して変位測定端5Aと同様の方法で固定される。このとき、三次元変位センサ1Cは、センサカバー13(図1参照)の固定用側面13cに設けられた取り付けねじ孔13dを用いて、試験架台32の天板に固定されている。つまり、三次元変位センサ1Cのベースプレート11の平面中心O(図1参照)の斜め下方(車両Vで見ると前方側の三次元変位センサ1Cの平面中心Oから手前下方)に変位測定端5Cが位置している。
ここで、取り付け部材29A,29B,29Cを取り付けられた部位が、特許請求の範囲に記載の「測定点」に対応する。その意味でエンジン21又はトランスミッション23に固定された取り付け部材29A,29B,29Cそのものを特許請求の範囲に記載の「測定点」としても良い。
【0032】
エンジン21及びトランスミッション23の結合体は、ほぼ剛体とみなすことができ、三次元変位センサ1A,1B,1Cにより変位測定端5A,5B,5Cの三次元変位量が測定できれば、エンジン21及びトランスミッション23の結合体の三次元変位量が分かるので、変位測定端5が取り付けられていない支持受け部27F,27Rの三次元変位量を計算によって求めることができる。
【0033】
ここで、エンジン21及びトランスミッション23の結合体の三次元変位量を算出するための直角座標系のXYZの座標軸の設定方法について説明する。例えば、X軸はエンジン21のクランク軸の回転中心軸35と一致させるようにし、エンジン21及びトランスミッション23の結合体の重心Gを含む垂直面がX軸と垂直に交わる点を直角座標系の座標原点(直角三次元座標系の原点)36とし、座標原点36から垂直にZ軸を、座標原点36からX軸及びZ軸に共に直角となるY軸を車両Vの前方水平方向に設定する。
そして、X軸周りの角度変位をロール振動と称し、Y軸周りの角度変位をピッチ振動と称し、Z軸周りの角度変位をヨー振動と称する。そして、三次元変位センサ1A,1B,1Cにより測定された変位測定端5A,5B,5Cの三次元変位量に基づいて、座標原点36の三次元並進振動、ロール振動、ピッチ振動及びヨー振動の成分を算出し、三次元変位量を直接測定することができない支持受け部27F,27Rの三次元変位量を算出する。
ここで支持受け部25L,25R,27F,27Rが特許請求の範囲に記載の「着目点」に対応する。従って、本実施形態では、支持受け部25L,25Rは、特許請求の範囲に記載の「測定点」でもあり、「着目点」でもある。
【0034】
図4は、三次元変位測定装置の機能ブロック構成図である。図4に示すように三次元変位測定装置50は、三次元変位センサ1A,1B,1C、信号前処理装置53、計測用コンピュータ51から構成される。計測用コンピュータ51としては、普通の市販のノート型パーソナルコンピュータでも良い。計測用コンピュータ51は、コンピュータ本体51a、液晶表示装置等から構成された表示部51b、キーボード、マウス等の入力装置51c、ハードディスク装置等で構成された記憶部51d、CPU51e等を含んでおり、他に図示しないROM,RAMや、CPU51e,ROM,RAM、入出力インタフェース間を接続するバス等を含んでいる。
図1に示したように三次元変位センサ1A,1B,1Cは、それぞれ3個のワイヤポテンショメータ2を有しており、その中に内蔵されたホール素子からの出力信号が信号前処理装置53の個別の信号前処理回路54で、増幅及びA/D変換され、計測用コンピュータ51の入力インタフェースに入力される。
【0035】
そして、記憶部51dに予め格納された三次元変位測定プログラムをCPU51eが読み出して、実行する機能部として、制御部61、三次元変位センサ1A,1B,1Cに対応して1組のセットとして3つのワイヤ引き出し長さ演算部(ポテンショメータ信号取得手段)62、座標軸設定部(座標軸設定手段)64、換算式設定部(換算式設定手段)65及び三次元変位量演算部(測定点変位量算出手段)66、被測定対象物三次元座標設定部67、並びに被測定対象物三次元変位解析部70を含んでいる。その他にCPU51eが実行する機能部として、車両情報取得部63を含んでいる。
前記した1組のセットとしての3つのワイヤ引き出し長さ演算部62、座標軸設定部64、換算式設定部65及び三次元変位量演算部66は、図4に示すように三次元変位センサ1A,1B,1Cに対応してA系、B系、C系の3組用意されている。
【0036】
被測定対象物三次元座標設定部67は、座標原点設定部(測定点座標設定手段、着目点座標設定手段)67a、測定点座標設定部(測定点座標設定手段)67b、着目点座標設定部(着目点座標設定手段)67cを含んでいる。
被測定対象物三次元変位解析部70は、測定点三次元座標換算部(着目点変位量算出手段)71、着目点三次元座標変位演算部(着目点変位量算出手段)72を含んでいる。そして、着目点三次元座標変位演算部72は、被測定対象物三次元運動解析部72aと着目点三次元座標換算部72bから構成されている。ちなみに、測定点三次元座標換算部71は、前記したA〜C系に対応してA系測定点三次元座標換算部71a、B系測定点三次元座標換算部71b、C系測定点三次元座標換算部71cを含んでいる。
【0037】
(制御部と初期設定の機能)
制御部61は、初期設定の機能の一つ目として、三次元変位センサ1A,1B,1Cの設置条件に対応した各A〜C系の三次元変位量演算部66における直角三次元座標系におけるX,Y,Zの各座標軸方向(XYZ方向)の成分の三次元変位量を算出するために、A〜C系のそれぞれの座標軸設定部64においてX,Y,Zの各座標軸方向をそれぞれの座標軸方向に対する+−方向も含めて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする座標軸方向設定入力機能を有している。
【0038】
また、制御部61は、初期設定の機能の二つ目として、前記した座標軸方向設定入力機能の作業の終了後に、前記した座標軸方向設定入力機能の結果を用いてA〜C系の換算式設定部65に、それぞれの系に含まれる3つのワイヤ引き出し長さ演算部62の算出したワイヤポテンショメータ2の回転角を示す出力信号に基づくワイヤ引き出し長さにより、初期状態におけるワイヤ引き出し長さからのワイヤ引き出し長さの変化量をX,Y,Zの各座標軸方向の成分の三次元変位量として三次元変位量演算部66にて換算算出する際に用いる換算式の係数を、A〜C系のそれぞれの換算式設定部65において、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。
【0039】
そのため、制御部61は、A〜C系のそれぞれの座標軸設定部64、換算式設定部65と接続している。座標軸設定部64で設定されたX,Y,Z方向は、それぞれの方向に対する+−方向も含めて換算式設定部65に入力される。
ちなみに、X,Y,Z方向のそれぞれの方向に対する+−方向は、後記する座標原点設定部67aにおけるそれぞれの方向に対する+−方向と整合したものである。
A〜C系のそれぞれの換算式設定部65で設定された換算式の係数は、それぞれの系の三次元変位量演算部66に入力される。
なお、変位測定端5A,5B,5Cそれぞれに対して、換算式は個別に用意され、個々の三次元変位センサ1の3本のワイヤ3で構成する三角錐の稜線の長さから三角錐の頂点である変位測定端5A,5B,5Cのそれぞれの三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。しかし、変位測定端5A,5B,5Cのそれぞれの初期状態における三角錐の形状は異なるし、また、三次元変位センサ1の取り付け方向も異なる可能性があることからこの座標軸方向設定入力機能が必要になる。
【0040】
制御部61は、初期設定の機能の三つ目として、被測定対象物、ここでは、エンジン21及びトランスミッション23の結合体のXYZの直角三次元座標系における座標原点36と、X,Y,Z座標軸をその正負の方向も含めて設定するために、被測定対象物三次元座標設定部67の座標原点設定部67aにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、座標原点設定部67aと接続しており、座標原点設定部67aにおいて設定された座標原点36及び、その正負の方向も含んだX,Y,Z座標軸の方向は、測定点座標設定部67b、着目点座標設定部67c、測定点三次元座標換算部71、着目点三次元座標変位演算部72に入力される(図3参照)。
【0041】
これは、例えば、CADシステムで被測定対象物であるエンジン21及びトランスミッション23の結合体の重心Gを求めて、車載状態でのクランク軸の回転中心軸35をX軸と定め、重心Gを含む垂直面がX軸と垂直に交わる点を直角三次元座標の座標原点36とすることによって設定することとする。ここで、座標原点36から車体左方向をX方向(+)方向とし、座標原点36から車体右方向をX方向(−)方向とする。
そして、重心Gを含む垂直面内の座標原点36から水平方向に前後に延びるY座標軸を設定し、例えば、前方方向をY方向(+)とし、後方方向をY方向(−)方向とする。重心Gを含む垂直面内の座標原点36から鉛直方向に上下に延びるZ座標軸を設定し、例えば、上方方向をZ方向(+)とし、下方方向をZ方向(−)方向とする。
【0042】
制御部61は、初期設定の機能の四つ目として、被測定対象物の測定点(図3の取り付け部材29A,29B,29Cが対応)の初期位置の三次元座標を、測定点座標設定部67bにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、測定点座標設定部67bと接続しており、測定点座標設定部67bにおいて設定された取り付け部材29A(図3参照)の初期位置の三次元座標は、A系測定点三次元座標換算部71aに入力され、取り付け部材29B(図3参照)の初期位置の三次元座標は、B系測定点三次元座標換算部71bに入力され、取り付け部材29Cの初期位置の三次元座標は、C系測定点三次元座標換算部71cに入力されるとともに、測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標が着目点三次元座標変位演算部72に入力される。
取り付け部材29A,29B,29Cの三次元座標の入力設定は、CADシステムで前記した原点と、座標軸を設定することによって容易に算出され、測定者はそのデータを入力することで簡単に行える。
【0043】
制御部61は、初期設定の機能の五つ目として、被測定対象物の着目点(本実施形態では、支持受け部27F,27R)の初期位置の三次元座標を、測定点座標設定部67bにおいて、測定者による表示部51bと入力装置51cを用いた設定入力を可能とする機能を有している。そのため、制御部61は、着目点座標設定部67cと接続している。
なお、測定点座標設定部67bから測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標が、着目点座標設定部67cに入力されているので、測定者による着目点の入力は、測定点と着目点が同じ部位であるものについては、その三次元座標を表示部51bの画面表示を見ながら入力装置51cでコピーして貼り付けることができる。
着目点座標設定部67cにおいて設定された着目点の初期位置の三次元座標は、着目点三次元座標変位演算部72に入力される。
着目点の三次元座標の入力設定は、CADシステムで前記した原点と、座標軸を設定することによって容易に算出され、測定者はそのデータを入力することで簡単に行える。
【0044】
制御部61による三次元変位センサ1A,1B,1CのX,Y,Zの各座標軸の方向(XYZ方向)をそれぞれの座標軸の方向に対する+−方向も含めた設定、三次元変位センサ1A,1B,1Cの出力信号に基づくXYZ方向の各成分の初期位置からの変位量算出用の換算式の設定、被測定対象物の直角座標系の座標原点36及び+−方向を含めたX,Y,Z方向の設定、測定点である取り付け部材29A,29B,29Cの三次元座標の設定、被測定対象物の着目点の三次元座標の設定が終了すると、初期設定の作業は終了する。その後、制御部61は、測定者によって表示部51bと入力装置51cを用いて、初期位置の記憶指令信号と測定開始の信号が入力されると、A〜C系の各ワイヤ引き出し長さ演算部62、三次元変位量演算部66、被測定対象物三次元変位解析部70に初期位置の記憶指令信号に続いて計測開始の指令信号を入力する。各ワイヤ引き出し長さ演算部62、三次元変位量演算部66、被測定対象物三次元変位解析部70は、初期位置の記憶指令信号を受けて、必要に応じて初期値をそれぞれ記憶し、計測開始の指令信号で、後記する演算を開始する。
【0045】
(ワイヤ引き出し長さ演算部)
ワイヤ引き出し長さ演算部62は、個々のワイヤポテンショメータ2からの出力信号が信号前処理回路54で増幅されデジタル信号に変換されたものを入力として、ワイヤポテンショメータ2の角度変位量を示す出力信号を、ワイヤ引き出し孔2aからのワイヤ引き出し量に換算し、三次元変位量演算部66に出力する。この演算は、公知のものであり省略する。ちなみに、本実施形態におけるワイヤポテンショメータ2のプーリは初期位置から伸び方向又は縮み方向にそれぞれほぼ90度回転する程度の変位量に対応するものであり、大きな変位量を想定したものではない。
【0046】
(三次元変位量演算部)
A〜Cの各系の三次元変位量演算部66は、制御部61からの初期位置の記憶指令信号を受信したときの3つのワイヤ引き出し長さ演算部62からのワイヤ引き出し量を初期位置とし、計測開始後の3つのワイヤ引き出し長さ演算部62からのワイヤ引き出し量に対するX,Y,Z方向それぞれの初期位置からの三次元変位量を、換算式設定部65から入力された換算式の係数を用いて、所定の周期で算出する。A〜Cの各系の三次元変位量演算部66で算出された三次元変位量は、測定点三次元座標換算部71の当該の系の測定点三次元座標換算部71a,71b,71cに入力される。
【0047】
(測定点三次元座標換算部)
測定点三次元座標換算部71のA〜C系の測定点三次元座標換算部71a,71b,71cは、初期位置の測定点の三次元座標に、A〜C系の各系の三次元変位量演算部66から入力された三次元変位量を加算して、測定点三次元座標の変化推移のデータとして、着目点三次元座標変位演算部72に入力する。
また、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータは、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
【0048】
(着目点三次元座標変位演算部)
着目点三次元座標変位演算部72は、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータと、測定点座標設定部67bから入力された測定点である取り付け部材29A,29B,29Cの初期位置の三次元座標と、に基づいて、被測定対象物三次元運動解析部72aにおいて、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出する。被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、着目点三次元座標換算部72bに入力される。また、被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
【0049】
この被測定対象物三次元運動解析部72aにおける座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分は、A〜C系の測定点三次元座標換算部71a,71b,71cで算出された測定点三次元座標の変化推移のデータに基づき容易に算出できる。
【0050】
着目点三次元座標換算部72bは、被測定対象物三次元運動解析部72aにおいて算出された座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分と、取り付け部材29A,29B,29Cと異なる着目点(ここでは、図3の支持受け部27F,27Rが対応)の初期位置の三次元座標に基づいて、着目点である支持受け部27F,27RのX,Y,Z方向の三次元変位量を算出する。測定点ではない着目点である支持受け部27F,27Rの着目点三次元座標換算部72bで算出された三次元変位量は、時刻データとともに記憶部51dに出力され、時系列で記憶格納される。
この着目点である支持受け部27F,27RのX,Y,Z方向の三次元変位量は、支持受け部27F,27Rの初期位置の三次元座標と、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分とから容易に算出できる。
着目点であるとともに測定点でもある取り付け部材29A,29Bが取り付けられた支持受け部25L,25Rの三次元変位量は、A,B系の三次元変位量演算部66から被測定対象物三次元変位解析部70に入力されたものがそのまま用いられる。
【0051】
なお、本実施形態では、車両Vを車両試験装置であるロードシミュレータの上に載せて、例えば、駆動輪である前輪に対し各種の走行状態を与え、車両Vでは、エンジン21の回転速度や出力トルクを変えたり、トランスミッション23の変速段を変えたり、ブレーキ操作をして、車両走行状況を変化させて耐久試験を行い、三次元変位測定装置50は、車両走行状況に応じた被測定対象物であるエンジン21及びトランスミッション23の結合体の支持受け部25L,25R,27F,27Rの三次元変位量を測定する。そのために、計測用コンピュータ51は、入力インタフェース装置55に、例えば、車両Vのエンジン回転速度信号Ne、アクセル開度信号SAc、トランスミッション23のギアシフト位置信号SSft、駆動輪の車輪速信号SV、ブレーキの踏み込み量を示すブレーキ操作信号SB、ロードシミュレータ側で検出される駆動輪の駆動トルクを示す駆動トルク信号STD等の車両情報が入力され、それぞれの入力信号に応じた前処理回路56A,56B,56C,56D,56E,56Fを介して計測用コンピュータ51の入力インタフェースに入力され、車両情報取得部63で取得され、時刻データとともに記憶部51dに記憶格納される。
【0052】
測定が終了すると、測定者が表示部51b、入力装置51cを用いて計測の終了を制御部61に入力し、制御部61が、ワイヤ引き出し長さ演算部62、三次元変位量演算部66、測定点三次元座標換算部71、着目点三次元座標変位演算部72に測定終了の指令を出し、各演算機能や記憶部51dへのデータ格納を停止する。
【0053】
なお、耐久試験中に、制御部61は、表示部51bに、各測定点(取り付け部材29A,29B,29C)の三次元変位量の時系列変化、測定点に含まれない着目点(支持受け部27F,27R)の三次元変位量の時系列変化、座標原点36のX,Y,Z方向への並進変位成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分の時系列変化のグラフを車両情報取得部63で取得された車両情報とともに表示するようにしても良い。
【0054】
本実施形態によれば、特許文献1に記載のような伸縮変位を検出する変位検出器を備えた伸縮自在な連結ロッドや、その基部側が垂直軸及び水平軸の周りに回転可能な構成として、第1及び第2の角度検出器を設けて垂直軸及び水平軸の周りの角度変位を検出するという複雑な構成とすることなく、単に、1箇所の測定点の三次元変位量の測定に対して、3個のワイヤポテンショメータ2のワイヤ3の引き出し長さを計測するだけで、3本のワイヤ3で構成する三角錐の頂点の変位測定端5の三次元位置が一意に特定でき、それを容易に換算式でXYZの直角三次元座標に変換できる。
従って、3本のワイヤ3(図1参照)の慣性は極めて小さく、被測定対象物の高速な振動変位を特許文献1のような技術よりも正確に測定できる。また、3個のワイヤポテンショメータ2(図1参照)を用いたものであり、三次元変位測定装置50は、超音波、光、レーザ光等を使用した非接触式の従来のものより極めて安価に製造できる。
【0055】
また、図3に例示するように被測定対象物に対して、少なくとも3箇所以上の被測定対象物の所定の測定点(本実施形態では、取り付け部材29A,29B,29C)を設けて、それぞれ三次元変位センサ1(1A,1B,1C)で変位量を測定しているので、設定された直角三次元座標系のX方向、Y方向、Z方向の測定点における変位量が算出できる。また、少なくとも3箇所以上の被測定対象物の所定の測定点の初期位置の直角三次元座標系のX座標、Y座標、Z座標を入力し、着目点の初期位置の直角三次元座標系のX座標、Y座標、Z座標をも入力しているので、着目点三次元座標変位演算部72によって測定点と異なる着目点の直角三次元座標系のX方向、Y方向、Z方向の変位量が、測定点と着目点との間の直角三次元座標系の相対位置関係と、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、算出することができる。
従って、被測定対象物の外形形状の関係で被測定対象物と干渉したり、被測定対象物に取り付けられた外部搭載品等(エンジン21及びトランスミッション23の周辺に配置された機器、配管、計装線等)と干渉したりして、測定点として選ぶことができない着目点(支持受け部27F,27R)の直角三次元座標系のX方向、Y方向、Z方向の変位量を間接的に計算によって得ることが容易にできる。
【0056】
本実施形態では被測定対象物は、図3に示すように車両Vのエンジン21及びトランスミッション23が一体に結合されたものである。そして、直角三次元座標系のX軸は、エンジン21の停止時のクランク軸の回転中心軸35とし、座標原点36は、X軸に垂直であって、かつ、エンジン21及びトランスミッション23が一体に結合されたものの重心点Gをその中に含む垂直平面とX軸との交点に設定されている。直角三次元座標系のZ軸は、X軸と座標原点36で直交する垂直軸であり、Y軸、X軸及びZ軸と座標原点36で直交する水平軸である。
従って、着目点三次元座標変位演算部72において、少なくとも3箇所以上の測定点における直角三次元座標系のX方向、Y方向、Z方向の変位量から、座標原点36のX方向、Y方向、Z方向の並進変位量の成分と、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動それぞれの変位量成分を算出することができる。
【0057】
例えば、着目点をエンジン21及びトランスミッション23が一体に結合されたものを、エンジンマウント26L,26R,28F,28Rを介して弾性的に振動吸収して車体により支持される支持受け部25L,25R,27F,27Rのエンジン運転状態における変位量を測定したい場合に、エンジン21及びトランスミッション23の周辺に配置された機器、配管、計装線等によって支持受け部27F,27Rの変位量を直接測定できない。そのようなときは、その支持受け部27F,27Rを着目点とし、着目点三次元座標変位演算部72で、エンジンの運転状態における支持受け部27F,27Rの三次元の変位量が算出できる。そして、エンジンマウント28F,28Rに加わる三次元の変位量が算出できる。そのとき、並進的な変位量成分だけでなく、X軸周りのロール振動、Y軸周りのピッチ振動、Z軸周りのヨー振動、それぞれの変位量成分をも算出することができ、エンジンマウント26L,26R,28F,28Rの耐久性試験の分析において、各エンジンマウント26L,26R,28F,28Rに加わる変位成分を考慮した改良方向の示唆を得ることができる。
【0058】
なお、本実施形態の三次元直角座標系のXYZ軸は、図3で示したように設定したが、それに限定されるものではなく、重心Gを直角三次元座標系の座標原点36とし、重心Gを通るクランク軸の回転中心軸に平行な軸をX軸とし、X軸に垂直な重心Gを含む平面内において車両の重心Gから水平に前方方向にY軸を取り、重心Gから鉛直上方にZ軸を設定するようにしても良い。
また、本実施形態の被測定対象物の例としてとして、車両Vのエンジン21及びトランスミッション23の結合体を横置き、前輪駆動方式としたが、それに限定されるものではない。
【符号の説明】
【0059】
1,1A,1B,1C 三次元変位センサ(三次元変位測定ユニット)
2 ワイヤポテンショメータ(ポテンショメータ)
2a ワイヤ引き出し孔
3 ワイヤ
5,5’,5A,5B,5C 変位測定端
11 ベースプレート
11a 取り付けねじ孔
11c 基準辺
13 センサカバー
13a ワイヤ引き出し孔
13c 固定用側面
13d 取り付けねじ孔
21 エンジン
23 トランスミッション(変速機)
25L,25R 支持受け部(測定点、着目点)
27F,27R 支持受け部(着目点)
26L,26R,28F,28R エンジンマウント
29A,29B,29C 取り付け部材(測定点)
31L,31R フレーム
32 試験架台
35 クランク軸の回転中心軸
36 座標原点(直角三次元座標系の原点)
50 三次元変位測定装置
51 計測用コンピュータ
51a コンピュータ本体
51b 表示部(入力手段)
51c 入力装置(入力手段)
51d 記憶部
62 ワイヤ引き出し長さ演算部(ポテンショメータ信号取得手段)
63 車両情報取得部
64 座標軸設定部(座標軸設定手段)
65 換算式設定部(換算式設定手段)
66 三次元変位量演算部(測定点変位量算出手段)
67 被測定対象物三次元座標設定部
67a 座標原点設定部(測定点座標設定手段、着目点座標設定手段)
67b 測定点座標設定部(測定点座標設定手段)
67c 着目点座標設定部(着目点座標設定手段)
70 被測定対象物三次元変位解析部
71 測定点三次元座標換算部(着目点変位量算出手段)
71a A系測定点三次元座標換算部
71b B系測定点三次元座標換算部
71a C系測定点三次元座標換算部
72 着目点三次元座標変位演算部(着目点変位量算出手段)
72a 被測定対象物三次元運動解析部
72b 着目点三次元座標換算部
G 重心
O 平面中心
V 車両
【特許請求の範囲】
【請求項1】
ワイヤを巻回しているプーリを有し、前記ワイヤが引き出されることによって回転する前記プーリの回転角に基づいて引き出された前記ワイヤの長さを検出するポテンショメータが、3個所定の周方向角度の間隔を取って一つの支持基板の上に取り付けられた三次元変位測定ユニットと、前記三次元変位測定ユニットの前記3個のポテンショメータからのそれぞれの出力信号を取得するポテンショメータ信号取得手段と、を備えた三次元変位測定装置であって、
測定者が入力可能な入力手段と、
前記三次元変位測定ユニットの3個の前記ポテンショメータのそれぞれ前記ワイヤの引き出し部分の先端部を1点で接合して変位測定端とし、前記3本のワイヤで三角錐を形成するようにし、前記変位測定端が、被測定対象物の所定の測定点に固定され、
前記測定者による前記入力手段からの入力に従って、前記被測定対象物の所定の測定点の初期位置に対し、XYZの直角三次元座標系の各座標軸の向きを設定する座標軸設定手段と、
前記測定者による前記入力手段からの入力に従って、前記3個のポテンショメータからの出力信号に基づいて前記被測定対象物の所定の測定点の前記初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量に換算する換算式を設定する換算式設定手段と、
前記換算式設定手段により設定された前記換算式を用いて、3個の前記ポテンショメータからの前記出力信号に基づいて、前記初期位置からの前記被測定対象物の所定の測定点の前記直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する測定点変位量算出手段と、
を備えることを特徴とする三次元変位測定装置。
【請求項2】
更に、三次元の立体の剛体と仮定できる前記被測定対象物に対して、前記少なくとも3箇所以上の前記被測定対象物の所定の測定点の初期位置に係わる前記設定された直角三次元座標系のX座標、Y座標、Z座標を、前記測定者による前記入力手段からの入力に従って設定する測定点座標設定手段と、
前記設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量を求めたい前記被測定対象物の所定の着目点の初期位置に係わる前記設定された直角三次元座標系のX座標、Y座標、Z座標を、前記測定者による前記入力手段からの入力に従って設定する着目点座標設定手段と、
前記設定された前記被測定対象物の所定の着目点のうちの、前記設定された前記少なくとも3箇所以上の前記被測定対象物の所定の測定点と異なるものに対して、前記設定された前記少なくとも3箇所以上の前記被測定対象物の所定の測定点との前記設定された直角三次元座標系のX座標、Y座標、Z座標の相対位置に基づいて、当該の着目点の初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する着目点変位量算出手段と、
を備えることを特徴とする請求項1に記載の三次元変位測定装置。
【請求項3】
前記被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、
前記設定された直角三次元座標系のX軸は、前記エンジンの停止時のクランク軸の回転中心軸であり、前記Z軸は、前記X軸に垂直な垂直平面内に含まれた前記X軸に直交する垂直軸であり、前記Y軸は、前記X軸及び前記垂直平面内に含まれた前記Z軸に直交する水平軸であり、
前記被測定対象物の所定の着目点とは、前記エンジン及び変速機が車体に支持される部位であり、
前記着目点変位量算出手段は、少なくとも前記エンジンの回転による前記X軸周りのロール振動を考慮して、当該の着目点の初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出することを特徴とする請求項2に記載の三次元変位測定装置。
【請求項4】
前記設定された直角三次元座標系の前記Y軸と前記Z軸とは、前記X軸に垂直であって、かつ、前記エンジン及び変速機が一体に結合されたものの重心点をその中に含む前記垂直平面内に設定され、
前記着目点変位量算出手段は、前記被測定対象物の所定の着目点に対して、前記設定された直角三次元座標系の原点の前記X方向、Y方向、Z方向の並進変位成分と、前記X軸周りのロール振動、前記Y軸周りのピッチ振動、前記Z軸周りのヨー振動それぞれの変位量成分を算出することを特徴とする請求項3に記載の三次元変位測定装置。
【請求項1】
ワイヤを巻回しているプーリを有し、前記ワイヤが引き出されることによって回転する前記プーリの回転角に基づいて引き出された前記ワイヤの長さを検出するポテンショメータが、3個所定の周方向角度の間隔を取って一つの支持基板の上に取り付けられた三次元変位測定ユニットと、前記三次元変位測定ユニットの前記3個のポテンショメータからのそれぞれの出力信号を取得するポテンショメータ信号取得手段と、を備えた三次元変位測定装置であって、
測定者が入力可能な入力手段と、
前記三次元変位測定ユニットの3個の前記ポテンショメータのそれぞれ前記ワイヤの引き出し部分の先端部を1点で接合して変位測定端とし、前記3本のワイヤで三角錐を形成するようにし、前記変位測定端が、被測定対象物の所定の測定点に固定され、
前記測定者による前記入力手段からの入力に従って、前記被測定対象物の所定の測定点の初期位置に対し、XYZの直角三次元座標系の各座標軸の向きを設定する座標軸設定手段と、
前記測定者による前記入力手段からの入力に従って、前記3個のポテンショメータからの出力信号に基づいて前記被測定対象物の所定の測定点の前記初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量に換算する換算式を設定する換算式設定手段と、
前記換算式設定手段により設定された前記換算式を用いて、3個の前記ポテンショメータからの前記出力信号に基づいて、前記初期位置からの前記被測定対象物の所定の測定点の前記直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する測定点変位量算出手段と、
を備えることを特徴とする三次元変位測定装置。
【請求項2】
更に、三次元の立体の剛体と仮定できる前記被測定対象物に対して、前記少なくとも3箇所以上の前記被測定対象物の所定の測定点の初期位置に係わる前記設定された直角三次元座標系のX座標、Y座標、Z座標を、前記測定者による前記入力手段からの入力に従って設定する測定点座標設定手段と、
前記設定された直角三次元座標系のX方向、Y方向、Z方向へのそれぞれの変位量を求めたい前記被測定対象物の所定の着目点の初期位置に係わる前記設定された直角三次元座標系のX座標、Y座標、Z座標を、前記測定者による前記入力手段からの入力に従って設定する着目点座標設定手段と、
前記設定された前記被測定対象物の所定の着目点のうちの、前記設定された前記少なくとも3箇所以上の前記被測定対象物の所定の測定点と異なるものに対して、前記設定された前記少なくとも3箇所以上の前記被測定対象物の所定の測定点との前記設定された直角三次元座標系のX座標、Y座標、Z座標の相対位置に基づいて、当該の着目点の初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出する着目点変位量算出手段と、
を備えることを特徴とする請求項1に記載の三次元変位測定装置。
【請求項3】
前記被測定対象物は、車両のエンジン及び変速機が一体に結合されたものであって、
前記設定された直角三次元座標系のX軸は、前記エンジンの停止時のクランク軸の回転中心軸であり、前記Z軸は、前記X軸に垂直な垂直平面内に含まれた前記X軸に直交する垂直軸であり、前記Y軸は、前記X軸及び前記垂直平面内に含まれた前記Z軸に直交する水平軸であり、
前記被測定対象物の所定の着目点とは、前記エンジン及び変速機が車体に支持される部位であり、
前記着目点変位量算出手段は、少なくとも前記エンジンの回転による前記X軸周りのロール振動を考慮して、当該の着目点の初期位置からの前記設定された直角三次元座標系のX方向、Y方向、Z方向への変位量を算出することを特徴とする請求項2に記載の三次元変位測定装置。
【請求項4】
前記設定された直角三次元座標系の前記Y軸と前記Z軸とは、前記X軸に垂直であって、かつ、前記エンジン及び変速機が一体に結合されたものの重心点をその中に含む前記垂直平面内に設定され、
前記着目点変位量算出手段は、前記被測定対象物の所定の着目点に対して、前記設定された直角三次元座標系の原点の前記X方向、Y方向、Z方向の並進変位成分と、前記X軸周りのロール振動、前記Y軸周りのピッチ振動、前記Z軸周りのヨー振動それぞれの変位量成分を算出することを特徴とする請求項3に記載の三次元変位測定装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−104862(P2013−104862A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−251224(P2011−251224)
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]