
三次元形状データ処理装置、三次元形状データ処理システムおよび三次元形状測定システム
【課題】対象物についての形状データの配置合わせの可否を判定する手法を改善する。
【解決手段】対象物上で互いに重なる部分を有する第1領域と第2領域のそれぞれの三次元形状を表現した第1形状データと第2形状データとを取得し、第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成して、生成された第3形状データのそれぞれを第1形状データへ配置合わせすることにより複数の第4形状データを生成する。そして、第1領域と第2領域とを包含する範囲について所定の許容範囲内の精度で対象物の三次元形状を再現できるか否かを、複数の第4形状データについての形状配置の相互関係に基づいて判定する。
【解決手段】対象物上で互いに重なる部分を有する第1領域と第2領域のそれぞれの三次元形状を表現した第1形状データと第2形状データとを取得し、第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成して、生成された第3形状データのそれぞれを第1形状データへ配置合わせすることにより複数の第4形状データを生成する。そして、第1領域と第2領域とを包含する範囲について所定の許容範囲内の精度で対象物の三次元形状を再現できるか否かを、複数の第4形状データについての形状配置の相互関係に基づいて判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムに関する。
【背景技術】
【0002】
近年、工業製品の検査の1つとして、CADデータなどの設計データに基づいて作成された工業製品の部品の三次元形状を計測し、計測された三次元形状とCADデータとをコンピュータを用いて比較することによって、その部品が、設計データに対して所定の公差内の形状誤差で作成されたものであるか否かを調べるCAT(Computer-Aided Testing)が行われている。
【0003】
CATに用いられる三次元形状の測定は、しばしば、物体表面上の多くの点の三次元座標を短時間に非接触で測定することができる三次元デジタイザ(「三次元測定機」などとも称する)を用いた三次元測定(三次元計測)によって行われる。
【0004】
三次元デジタイザには、ステレオ画像法などを用いる受動型、光レーダ法や光投影法などの能動型、およびそれらを組合わせた能動受動型とがある。例えば、ステレオ画像法を用いる三次元デジタイザでは、複数のカメラを用いて互いに異なる複数の方向から測定対象物を撮影し、得られた複数の画像から三角測量の原理によって、測定対象物上の各点の三次元座標を算出する三次元測定を行う。
【0005】
また、光投影法を用いる三次元デジタイザは、測定対象物に対して投射装置から検出光を投射し、測定対象物からの反射光をカメラの撮像素子で受光する。検出光としてスリット光を用いたものがスリット光投影法(光切断法ともいう)である。スリット光投影法では、スリット光を偏向して測定対象物を光学的に走査し、測定対象物の表面形状に基づくスリット光の変形の程度から、三角測量の原理によって測定対象物上の各点の三次元座標を算出する三次元測定を行う。なお、これら各点の三次元座標の集合を「三次元形状データ」または「形状データ」などと称する。
【0006】
このように、三次元デジタイザは、そのカメラおよび投射装置などに面している対象物の形状のみを測定することが可能であり、三次元デジタイザに面していない側の対象物表面の形状は測定することができない。また、三次元デジタイザが三次元測定することができる範囲は、カメラ間などの基線長、カメラの画角および被写界深度などによって定められる所定の立体的な範囲(「測定範囲」とも称する)によっても制限されており、測定範囲の大きさが対象物よりも小さいこともしばしばある。
【0007】
このため、部品の全体的(全周的)な形状をCATによる検査対象として測定するためには、部品に対して三次元デジタイザの位置や姿勢を変えることにより、異なる複数の方向から複数回の三次元測定を行い、得られた複数の三次元形状データが、部品についての全体的な三次元形状を表すように、各三次元形状データが表す三次元形状の位置および姿勢を示す配置(「形状配置」とも称する)をそれぞれ調整することによって、部品の全体的な形状を表すCAT用の形状データを生成する必要がある。
【0008】
なお、このような複数の三次元形状データについての各形状配置の調整は、それら複数の三次元形状データについての複数の三次元形状をそれぞれ本来あるべき形状配置に合わせる調整であることから「配置合わせ」または、「位置合わせ」などとも称される。
【0009】
配置合わせの手法としてはいくつかの手法があるが、1つ目の手法として、対象物上で測定範囲が重複するように対象物に対して異なる複数の方向から複数回の三次元測定を行って、各測定範囲の三次元形状を表す複数の形状データを得た後、例えば、ICP(Iterative Closest Points)法を用いることで、得複数の形状データそれぞれについての測定範囲が重複している部分の三次元形状間の対応関係に基づいて、各形状データについての配置合わせを行う手法がある。特許文献1では、1つ目の手法が採用されている。
【0010】
また、配置合わせの2つ目の手法として、複数のマーカが貼付された対象物に対して1つ目の手法と同様の三次元測定を行って、対象物の三次元形状のうち、対象物上で重複部分を有する2つの測定範囲の三次元形状を表すそれぞれ表す2つの形状データを得た後、2つの測定範囲の重複部分に存在する3以上の複数のマーカの位置をそれぞれ代表的に表す複数の三次元座標(「三次元位置」とも称する)からなる「マーカ位置データ」を各形状データについてそれぞれ求め、各形状データそれぞれにおけるマーカ位置データ間の対応関係に基づいて、各形状データについての配置合わせを行う手法などがある。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−303839号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1が採用するICP法は、反復演算を繰り返すことにより複数の形状データが表す各三次元形状間の面と面との距離が最小になるような座標変換情報を求めるアルゴリズムであるため、ICP法を適用して、相互に略同一の形状を有する複数の三次元形状を配置合わせする場合には、例えば、平面同士や、曲率が一定の曲面同士など、ICP法を適用する三次元形状の特徴によっては配置合わせに失敗する場合がある。
【0013】
図1は、ICP法による配置合わせの失敗例を示す図である。図1の例では2つの形状は、重なり合う部分が互いに密着するように配置合わせされているが、上下方向(矢印Y1方向)には、本来あるべき位置からずれて配置合わせされてしまっている。
【0014】
このように、検査対象の部品を測定して得られた複数の形状データについての略同一の三次元形状部がICP法による配置合わせに不向きな形状である場合には、検査対象の部品の全体的な三次元形状を表す形状データを正確に生成することができない。
【0015】
つまり、特許文献1の手法では、複数の形状データに対して配置合わせを試みた結果、例えば、それらについての三次元形状同士が本来あるべき配置からずれて重なり合っているものの、それら三次元形状同士の面と面との距離がほとんど無いような場合には、配置合わせ後の形状データ間の相互関係によっては、配置合わせの誤りを検出できないという問題がある。
【0016】
また、2つ目の配置合わせ方法においても、複数の測定範囲の重複部分に存在する各マーカの三次元位置が全て誤差なく測定される場合には、各マーカに対応する三次元位置同士が全て一致するか否かによって、複数の測定範囲に対応する形状データ間の配置合わせが正しいか否かを判定できるが、実際に三次元測定される各形状データについては、三次元測定時の測定誤差のために、各マーカの三次元位置は、実際の三次元位置に対して種々の3次元的な方向にずれて測定される。従って、各マーカに対応する三次元位置同士が全て一致することは、通常、あり得ない。このため、配置合わせ後の各形状データのマーカ位置データの相互関係によっては、正しい配置合わせであるか否かを判定することが困難であるという問題がある。
【0017】
また、配置合わせが正しいか否かをオペレータが目視で判定する場合には、例えば、判定対象の複数の形状データを取得する三次元測定時における対象物上での三次元デジタイザの測定範囲の配置を記憶しておき、この配置と、透視投影などによって表示装置上に二次元画像として表示された、配置合わせ後の形状データについての配置とを対比することによって、形状データについての配置合わせにおいて許容できない配置ズレが生じていないかどうかを検証するとともに、三次元形状間の重なりの具合が適正範囲内であるか否かを、表示された画像間の相互関係を目視に基づいて判定することによって、微視的な配置ズレが生じていないかどうかを検証することが必要となる。
【0018】
これらの検証を効率的に行うためには、検証部位や視線の角度を変更するために透視投影の視点を様々に変更すること、全体的・部分的な検証のために表示画像の拡大・縮小をすること、および三次元形状間の区別を容易にするための色彩・パターンを変更することなどが必要であるため、判定処理に手間が掛かり、配置合わせの可否を判定する「配置合わせ可否判定処理」を多くの形状データに対して行うことが困難であるという問題がある。
【0019】
また、配置合わせの可否を客観的な指標によらずに判定することから、オペレータの熟練度などによって、判定結果が異なったり、所要時間の長短が生ずるという問題もある。
【0020】
そこで、本発明は、対象物の三次元形状を測定して得られる三次元形状データについての配置合わせの可否を判定する手法を改善する技術を提供することを目的とする。
【課題を解決するための手段】
【0021】
上記の課題を解決するために、請求項1の発明は、対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4形状データを生成する形状配置調整手段と、単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4形状データについての形状配置の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0022】
また、請求項2の発明は、対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みる形状配置調整手段と、単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記派生データ生成処理において前記複数の第3形状データが生成されるときの前記第2形状データについての複数の形状配置の変動情報と、前記配置合わせ処理における前記複数の第3形状データについての複数の形状配置の変動情報とが、それぞれ合成された複数の形状配置の変動情報の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0023】
また、請求項3の発明は、請求項1または請求項2に記載された三次元形状データ処理装置であって、前記複数の幾何学的状態は、(a)前記所定の座標系における三次元的な位置および姿勢に相当する形状配置のズレ状態と、(b)三次元的な歪み状態と、のうち、少なくとも一方が互いに異なる状態であることを特徴とする。
【0024】
また、請求項4の発明は、請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、前記複数の第3形状データのうちのひとつは、前記第2形状データ自身であることを特徴とする。
【0025】
また、請求項5の発明は、請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、前記複数の第3形状データのすべては、前記第2形状データとは異なる幾何学的状態を表現していることを特徴とする。
【0026】
また、請求項6の発明は、請求項1から請求項5のいずれか1つの請求項に記載された三次元形状データ処理装置と、前記三次元形状データ処理装置で用いる前記第1形状データと前記第2形状データとを生成する形状データ生成手段と、を備えることを特徴とする。
【0027】
また、請求項7の発明は、請求項6に記載された三次元形状データ処理システムであって、前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成することを特徴とする。
【0028】
また、請求項8の発明は、請求項6に記載された三次元形状データ処理システムであって、前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、三次元形状を測定して形状データを取得する測定装置を用いて測定された前記対象物についての形状データに基づいて生成することを特徴とする。
【0029】
また、請求項9の発明は、請求項6から請求項8のいずれか1つの請求項に記載された三次元形状データ処理システムであって、前記判定手段において前記再現の可能性を否定する判定結果が出たときには、(a)前記形状データ生成手段は、前記第1領域および前記第2領域のいずれとも異なる前記対象物上の第3領域の三次元形状を表現する第5形状データを、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成し、(b)前記取得手段は、前記第2形状データに替えて前記第5形状データを取得することを特徴とする。
【0030】
また、請求項10の発明は、対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、三次元測定を行って前記複数の個別形状データを取得する測定装置と、前記測定装置と前記対象物とを相対的に配置する配置手段と、請求項6から請求項9のいずれか1つの請求項に記載された三次元形状データ処理システムと、を備え、前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする。
【0031】
また、請求項11の発明は、複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4位置データを生成する形状配置調整手段と、単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4位置データについての形状配置の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0032】
また、請求項12の発明は、複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みる形状配置調整手段と、単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記配置合わせ処理における前記複数の第3位置データのそれぞれについての形状配置の変動情報の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0033】
また、請求項13の発明は、請求項11または請求項12に記載された三次元形状データ処理装置と、前記三次元形状データ処理装置で用いる前記第1位置データと前記第2位置データとのそれぞれの生成に用いられる、前記第1領域についての前記対象物の三次元形状を表現した第1形状データと、前記第2領域についての前記対象物の三次元形状を表現した第2形状データとを生成する形状データ生成手段と、を備えることを特徴とする。
【0034】
また、請求項14の発明は、複数の識別点が設けられた対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、三次元測定を行って前記複数の個別形状データを取得する測定装置と、前記測定装置と前記対象物とを相対的に配置する配置手段と、請求項13に記載された三次元形状データ処理システムと、を備え、前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする。
【発明の効果】
【0035】
請求項1の発明によれば、対象物上の第2領域の三次元形状を表現した第2形状データに基づいて生成された複数の第3形状データが、第2領域と重なる部分を有する第1領域の三次元形状を表現した第1形状データに対して配置合わせされた後の複数の第4形状データについての形状配置の相互関係に基づいて、第1形状データと第2形状データとが配置合わせによって所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定するので、第1形状データと第2形状データとの相互関係によっては、第1形状データと第2形状データとが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0036】
また、請求項11の発明によれば、複数の識別点が設けられた対象物上の第2領域における3以上の着目識別点のそれぞれの位置を表現した第2位置データに基づいて生成された複数の第3位置データが、第2領域と重なる部分を有する第1領域における3以上の着目識別点のそれぞれの位置を表現した第1位置データに配置合わせさることによって生成された複数の第4位置データについての形状配置の相互関係に基づいて、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かを判定するので、第1位置データと第2位置データとについての形状配置の相互関係によっては、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【図面の簡単な説明】
【0037】
【図1】ICP法による三次元形状の配置合わせの失敗例を示す図である。
【図2】実施形態に係る三次元形状測定システムおよび三次元形状データ処理システムの構成例を示すブロック図である。
【図3】実施形態に係る三次元形状データ処理装置の機能構成を例示するブロック図である。
【図4】対象物に対する測定範囲の設定例を示す図である。
【図5】対象物に対する測定範囲の設定例を示す図である。
【図6】対象物についての個別形状データの取得を説明する図である。
【図7】対象物についての個別形状データの取得を説明する図である。
【図8】2つの個別形状データが1の座標系に座標変換された様子を示す図である。
【図9】2つの個別形状データが配置合わせされた様子を示す図である。
【図10】凹凸のある形状データ間の異なる配置関係の例を示す図である。
【図11】図10に示される形状データの配置合わせが成功した例を示す図である。
【図12】形状データの配置合わせが失敗した例を示す図である。
【図13】基準形状データと原参照形状データの取得を説明する図である。
【図14】基準形状データと原参照形状データを例示する図である。
【図15】基準形状データと原参照形状データを例示する図である。
【図16】CADデータから判定用形状データを生成する様子を説明する図である。
【図17】歪みの付与により生成されるズレ歪み含有参照形状データを例示する図である。
【図18】配置ズレの付与により生成されるズレ歪み含有参照形状データを、三次元測定によって生成する様子を説明する図である。
【図19】配置ズレの付与により生成されるズレ歪み含有参照形状データを、三次元測定によって生成する様子を説明する図である。
【図20】原参照形状データと実測により生成されるズレ歪み含有参照形状データの関係を説明する図である。
【図21】測定装置の装置配置の変動を説明する図である。
【図22】配置ズレを付与されたズレ歪み含有参照形状データを演算によって生成する様子を説明する図である。
【図23】配置ズレを付与されたズレ歪み含有参照形状データを演算によって生成する様子を説明する図である。
【図24】基準形状データと原参照形状データとズレ歪み含有参照形状データとが1の座標系に変換された様子を説明する図である。
【図25】配置調整済み参照形状データが生成される過程を例示する図である。
【図26】配置合わせが成功した配置調整済み参照形状データを例示する図である。
【図27】配置合わせが失敗した配置調整済み参照形状データを例示する図である。
【図28】配置調整済み参照形状データが生成される過程を例示する図である。
【図29】対象物の全体的な三次元形状を表す形状データを作成する手順例の概要を示すフローチャートである。
【図30】第2の装置配置情報を生成する手順例の概要を示すフローチャートである。
【図31】配置合わせ可否判定処理の手順例の概要を示すフローチャートである。
【図32】変形例に係る三次元形状測定システムおよび三次元形状データ処理システムの構成例を示すブロック図である。
【図33】変形例に係る三次元形状データ処理装置の機能構成を例示するブロック図である。
【図34】マーカが貼付された対象物に対する測定範囲の設定例を示す図である。
【図35】マーカが貼付された対象物の個別形状データを例示する図である。
【図36】マーカに基づいて配置合わせされた個別形状データを例示する図である。
【図37】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図38】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図39】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図40】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図41】マーカが貼付された対象物についての基準形状データおよび原参照形状データの生成例を説明する図である。
【図42】マーカが貼付された対象物についての基準形状データおよび原参照形状データの生成例を説明する図である。
【図43】、マーカ位置データ取得部および対応関係取得部の動作例を説明する図である。
【図44】歪み含有参照マーカ位置データの生成例を説明する図である。
【図45】配置合わせが成功した配置調整済みマーカ位置データの生成過程を説明する図である。
【図46】配置合わせが失敗した配置調整済みマーカ位置データの生成過程を説明する図である。
【図47】配置合わせ可否判定処理の手順例の概要を示すフローチャートである。
【発明を実施するための形態】
【0038】
<実施形態1について:>
[三次元形状測定システム500Aおよび三次元形状データ処理システム300A:]
図2は、実施形態1に係る三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの構成例を示すブロック図である。
【0039】
図2に示される三次元形状処理装置100A、三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8は、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの主要部をなしており、三次元形状測定システム500Aとして機能する場合と、三次元形状データ処理システム300Aとして機能する場合とがある。
【0040】
三次元形状データ処理システム300Aは、マニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報に基づいて配置された三次元デジタイザ2が対象物1を測定範囲が重複するように複数の方向から測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の形状データ(「判定用形状データ」と称する)を生成するとともに、それらの判定用形状データが、例えば、後述するICP法、スピンイメージ法などの、配置合わせ対象の三次元形状間に動的または静的に複数組みの対応点をそれぞれ設定し、これらの対応点に基づいて配置合わせを行う「形状対応点に基づく配置合わせ方法」によって適正に配置合わせ可能なものであるか否かを配置合わせ可否判定処理(後述)によって判定し、配置合わせ可能であると判定された各判定用形状データにそれぞれ対応する第1の装置配置情報を複数の第2の装置配置情報として生成する。
【0041】
三次元形状測定システム500Aは、あらかじめ三次元形状データ処理システム300Aとして機能することによって複数の第2の装置配置情報を生成した後、生成された複数の第2の装置配置情報に基づいて対象物1と三次元デジタイザ2とを相対的に配置し、対象物1の三次元形状を複数の方向から測定して得られる複数の形状データ(「個別形状データ」と称する)にICP法などの形状対応点に基づく配置合わせ方法を適用して対象物1の全体的な三次元形状を表す形状データを生成する。
【0042】
本実施形態においては、三次元形状測定システム500Aと三次元形状データ処理システム300Aとは、同一の構成要素により構成されているが、三次元形状測定システムおよび三次元形状データ処理システムは、例えば、それぞれ同一性能の三次元デジタイザならびにマニピュレータおよびその制御装置などを備えた別個の構成要素により構成されてもよいし、例えば、三次元形状データ処理システム300Aのマニピュレータおよびその制御装置については、三次元形状測定システム500Aのものよりも配置決め精度が高いものを採用してもよい。
【0043】
なお、同一形状の多くの部品に対して、それぞれ形状検査に用いられる形状データを生成する必要がある場合には、先ず、三次元形状データ処理システム300Aによって1つ目の部品を対象として複数の第2の装置配置情報を求めておき、次に、マニピュレータ3aの台座部に対して1つ目の部品と略同一の配置に設置された他の部品についても求められた複数の第2の装置配置情報を適用して三次元形状測定システム500Aによって三次元測定を行えば他の部品についても適正に配置合わせできる個別形状データが測定でき、多くの部品の検査用の形状測定にかかる時間を短縮することができる。ここでの、1つ目の部品に基づく複数の第2の装置配置情報の取得作業は、「ティーチング」などとも称される。
【0044】
次に、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aを構成する主要部について説明する。
【0045】
○三次元デジタイザ2:
三次元デジタイザ2は、対象物1の三次元形状を測定し、その三次元形状を表す形状データを取得する三次元デジタイザであり、本発明の「測定装置」に相当する。三次元デジタイザ2は、三次元形状データ処理装置100Aに接続されており(図3)、三次元形状データ処理装置100Aからの制御命令に従って対象物1の三次元測定を行い、測定した形状データを三次元形状データ処理装置100Aに供給するとともに、後述する変形例に係る実施形態などのように、例えば、対象物上に貼付されたマーカなどを画像処理によって抽出する用途などに供するために、必要に応じて、測定した対象物の画像データを三次元形状処理装置100Aへと供給する。なお、通常、三次元デジタイザ2は、測定時の対象物との距離を示す測定距離を変更することが可能であり、測定距離が長くなると対象物上での測定範囲が拡大することにより得られる形状データの解像度が低くなり、測定距離が短くなると逆に、得られる形状データの解像度は高くなる。
【0046】
三次元デジタイザ2が、三次元形状データ処理システム300Aおよび三次元形状測定システム500Aのそれぞれの構成要素として機能するときは、三次元デジタイザ2は、三次元測定で得た複数の形状データをそれぞれ複数の判定用形状データd1(図3)または複数の個別形状データd2(図3)として三次元形状処理装置100Aへ供給する。
【0047】
ここで、三次元デジタイザ2によって測定された形状データには、通常、測定装置の制御上の誤差、および測定した画像データに含まれるノイズなどのために、同じ配置において同じ測定パラメータに基づいて連続的に三次元測定を行ったとしても測定毎に僅かなばらつきが発生する。
【0048】
また、三次元デジタイザ2においては、三次元測定を正確に行うために形状が既知の校正用対象物などに基づいて校正が行われるが、この校正残差、装置の姿勢および使用中の温度ドリフトなどによっても三次元測定の誤差が発生する。
【0049】
通常、三次元デジタイザ2では、上述した三次元測定の誤差およびばらつきに基づいて、三次元測定の確からしさを表わした「測定精度」が規定されており、形状検査などを行う際には測定精度に留意する必要がある。また、測定精度は、通常、例えば、測定距離などによって定められるいくつかの測定条件ごとにそれぞれ規定されている。
【0050】
三次元デジタイザ2の測定精度d18は、三次元デジタイザ2から三次元形状処理装置100Aに供給されることにより、または操作部4(図3)などから入力することにより、あらかじめ記憶部14(図3)に記憶されており、必要に応じて使用される。
【0051】
また、三次元デジタイザ2としては、測定した対象物の画像データをその内部で処理して形状データを生成する上述したタイプの他に、測定した対象物の画像データを三次元形状データ処理装置100Aへ供給し、画像データから形状データへの変換は、三次元形状データ処理装置100Aにおいて行うタイプのものを採用してもよい。この場合には、三次元デジタイザ2と三次元形状処理装置100Aとで本発明の測定装置を構成することとなる。
【0052】
また、本願発明のうち、マーカが添付された対象物の三次元計測を行わない発明に係る測定装置としては、例えば、画像に基づく三角測量とは異なる方法により三次元測定を行うレーザトラッカーなども採用することができる。
【0053】
○マニピュレータ3aおよびマニピュレータ制御部3b:
マニピュレータ3aは、多関節のアーム部およびアーム部を設置する台座部などから構成される。マニピュレータ3aは、マニピュレータ制御部3bからの制御によって、アーム部を台座部に対して回転させるとともに、アーム部を曲げ伸ばしすることが可能であり、これらの動作によって、アーム部の先端は、台座部を中心とする所定範囲の空間内の任意の位置に所定の範囲の姿勢で配置決めされ得る。アーム部の先端には、三次元デジタイザ2が取り付けられている。
【0054】
マニピュレータ制御部3bは、接続ケーブルを介して三次元形状データ処理装置100Aに接続されており、三次元形状データ処理装置100Aからは、各種の制御命令およびマニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す装置配置情報d4(図3)がマニピュレータ制御部3bへと供給される。
【0055】
マニピュレータ制御部3bは、三次元デジタイザ2が装置配置情報d4に基づく所定の配置に配置決めされるように、マニピュレータ3aの動作を制御する。マニピュレータ制御部3bへの装置配置情報d4の入力は、測定者が、マニピュレータ制御部3bに設けられた不図示の入力部から入力することなどによっても行われ得るとともに、マニピュレータ3aの動作についても、この入力部から制御し得る。
【0056】
なお、通常、装置配置情報d4は、記憶部14(図3)に記憶されているマニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20に基づいて、対象物1に対して、三次元デジタイザ2を所望の相対的な配置に配置決めできるように設定される。従って、三次元デジタイザ2は、対象物1と三次元デジタイザ2との相対的な配置関係に基づいて設定された装置配置情報d4に基づいて配置決めされることになる。
【0057】
マニピュレータ制御部3bは、装置配置情報d4に基づいた三次元デジタイザ2の配置決めが終了すると、配置決め終了の合図および装置配置情報d4の確認のために、装置配置情報d4を三次元形状処理装置100Aにフィードバックする。三次元形状処理装置100Aは、三次元デジタイザ2の配置決めが終了したことを認識すると、三次元デジタイザ2に三次元測定を実行させる。なお、装置配置情報d4については、三次元デジタイザ2自体の三次元形状や、三次元デジタイザ2に取り付けられた装置配置検出用の構造物の三次元形状を他の形状測定機などを用いて測定することによって取得してもよいし、三次元デジタイザ2に装置配置情報d4を検出可能なセンサを設けて、その出力を取得するなどしても良い。
【0058】
ここで、マニピュレータ3aには、通常、アーム部の先端に取り付けられた三次元デジタイザ2などの位置および姿勢の配置決めに際して、取り付けられたものの重量などに応じた配置決めの誤差が発生するため、配置決めの確からしさを表わした「配置決め精度」が規定されている。
【0059】
マニピュレータ3aの配置決め精度d19は、マニピュレータ制御部3bから三次元形状処理装置100Aに供給されることにより、または操作部4(図3)などから入力することにより、あらかじめ記憶部14(図3)に記憶されており、必要に応じて使用される。
【0060】
また、図3に示される構成の他に、マニピュレータ3aのアーム部に対象物1を取り付け、固定された三次元デジタイザ2に対して、対象物1を移動される構成などを採用してもよい。
【0061】
マニピュレータ3aおよびマニピュレータ制御部3bは、本発明の「配置手段」に相当する。配置手段としては、マニピュレータの他に、接触式プローブによって対象物の形状を測定するCMM(座標測定機 Coordinate-measuring machine)の接触式プローブを取り外し、三次元デジタイザ2などを取り付け可能なマウント部を備えたものなどの、三次元デジタイザ2などを複数の配置に設定可能な各種の配置決め機構が採用され得る。
【0062】
また、配置手段としては、ベルトコンベアや回転ステージなどの、対象物を複数の配置に設定可能な各種の配置決め機構を採用してもよく、また、三次元デジタイザ2および対象物1をそれぞれ複数の配置に設定可能な各種の配置決め機構を共に採用しても良い。
【0063】
なお、対象物1を移動させる場合も、三次元デジタイザ2を移動させる場合と同様に、対象物1と三次元デジタイザ2との相対的な配置関係に基づいて設定された対象物1の配置情報に基づいて、配置手段は、対象物1の配置決めを行う。
【0064】
すなわち、本発明の配置手段は、三次元デジタイザ2などの測定装置と対象物とを相対的に配置する配置手段である。
【0065】
○CADシステム8:
CADシステム8は、種々の機械装置、製品、実用品、その他の物品について設計三次元形状を表す情報であるCADデータを作成しまたは蓄積するものである。また、CADデータは、設計三次元形状を表す情報の他に、これら各物品の材料、材質、各部の表面粗さ、寸法公差などの特性情報を含んでいてもよい。CADシステム8は、通信回線などを介して三次元形状データ処理装置100Aに接続されている。
【0066】
三次元形状データ処理システム300Aが機能している場合には、三次元形状処理装置100Aは、操作部4(図3)から入力された部品番号などの対象物の識別情報に対応するCADデータの供給を要求し、CADシステム8は、その要求に応じたCADデータd5(図3)を三次元形状処理装置100Aへと供給する。ここで、CADデータd5は、部品単位のデータであってもよいし、1つの部品が部品の特徴部である部位毎に分割されたデータであっても良い。
【0067】
[実施形態1に係る配置合わせ可否判定処理の原理の概要:]
次に、三次元形状処理装置100Aの説明に先立って、実施形態1に係る配置合わせ可否判定処理の原理の概要を、三次元形状測定システム500Aの動作の概要と合わせて説明する。
【0068】
○三次元形状測定システム500Aの動作の概要:
図4および図5は、三次元形状測定システム500Aが、複数の方向から対象物の三次元形状を測定するときの測定範囲の設定を説明する図である。図4では、装置配置情報d4aおよびd4bに基づいて配置決めされた三次元デジタイザ2が異なる複数の方向から、対象物1を三次元測定している。また、図4に示された異なる三次元デジタイザ2aおよび2bのように複数の三次元デジタイザを組合わせて三次元測定してもよい。このように、マニピュレータの可動範囲の制限によって1組のマニピュレータと測定装置によっては、対象物の着目部分の全ての三次元形状を測定することができない場合や、マニピュレータの移動時間のために測定所要時間が所定の制限時間を超える場合などでは複数台の測定装置をマニピュレータと組合わせて使用してもよい。また、対象物を回転ステージなどに載置することにより、対象物の全周的な三次元形状を測定してもよい。
【0069】
ここで、測定範囲n1およびn2は、それぞれ装置配置情報d4aおよび装置配置情報d4bに対応する三次元デジタイザ2の測定範囲を示しており、測定範囲n1およびn2にそれぞれ対応する三次元形状を表す形状データは、複数の個別形状データd2(図3)として、三次元形状処理装置100Aに供給される。測定範囲n1およびn2は対象物1上で重複する部分を有しており、その重複部分には、円柱状および四角柱状の部位が設けられている。測定範囲n1およびn2に対応する複数の個別形状データd2は、三次元形状処理装置100AによってICP法などを用いて、主に円柱状および四角柱状の部位に基づいて配置合わせされる。このように、ICP法などの形状対応点に基づく配置合わせ方法を用いる場合には、配置合わせされる形状データを取得するための測定範囲の重複部分に、凹凸形状が存在するように、測定範囲を設定する必要がある。
【0070】
これらの円柱状および四角柱状の部位のような凹凸などを形成する特徴的な形状が重複部分に存在せず、重複部分が、例えば平面である場合などでは、ICP法などの形状対応点に基づく配置合わせ方法を適用しても正しく配置合わせがなされないため、このような場合には、例えば、後述するマーカに基づく配置合わせなどが採用される。
【0071】
図5では、四角錐状の対象物1aに対する測定範囲の設定例が示されており、相互に重複する部分を有する測定範囲n1からn4が時計回りに隙間無く設定されている。各測定範囲に対応する複数の個別形状データd2は、主に、重複部分に設けられた円柱状の部位に基づいて、ICP法などによって位置合わせされる。欠落がない形状データを取得する必要がある場合には、このように対象物の検査対象などの着目部分において、すきまなく測定範囲を設定する必要がある。
【0072】
図6および図7は、対象物についての個別形状データの取得を説明する図である。図6では、凹凸のある曲面によって形成される対象物1の三次元形状を、矢印Y2に沿って装置配置情報d4aおよび装置配置情報d4bに基づいて順次配置決めされ、各配置においてそれぞれ測定範囲n1およびn2を有する三次元デジタイザ2を用いて測定している。
【0073】
ここで、測定範囲n1およびn2の一部は、対象物1上で重複しているため、測定される形状データは、略同一の三次元形状を表す形状データを有することとなる。
【0074】
図7は、図6に示された、装置配置情報d4aおよび装置配置情報d4bに基づいて配置決めされ三次元デジタイザ2がそれぞれ測定した個別形状データd2aおよびd2bを、それらが表す三次元形状として示している。
【0075】
図8は、図7に示された個別形状データd2aおよびd2bが、1の座標系に座標変換された様子を示す図である。なお、図8から図12においては、三次元形状間の配置ずれ量を、三次元形状の大きさに対して誇張して表示している。
【0076】
この座標変換は、装置配置情報d4aおよびd4bに基づいて行うことができる。すなわち、装置配置情報d4aおよびd4bと、装置配置情報d4aおよびd4bに基づいて配置決めされた三次元デジタイザ2の実際の配置とには、既述したマニピュレータ3aの配置決め誤差に起因した誤差があり、この誤差のために図8に示されるように、個別形状データd2aとd2bとは、通常、重なることがない。
【0077】
図9は、図8に示された配置がずれた2つの個別形状データd2aおよびd2bが配置合わせされた様子を示す図であり、この配置合わせは、個別形状データd2aおよびd2bがそれぞれ表す三次元形状の略同一の形状部分に基づいて、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法によって行われている。
【0078】
ここで、配置合わせ対象の複数の三次元形状データのそれぞれをスピンイメージに変換し、各スピンイメージ間で複数組みの対応点を探索することによって三次元形状データ間に複数組みの対応点を設定し、三次元形状データ間の配置合わせを行う手法を、本出願においては「スピンイメージ法」と称する。
【0079】
なお、「スピンイメージ」は、三次元形状データの各点について、当該各点とその周囲の各点との三次元的な位置関係に基づいて、三次元形状データの配置に依存しない所定の特徴量を特定することによって得られる画像である。
【0080】
スピンイメージは、三次元形状データの配置に依存しないため、スピンイメージ法では、通常、三次元形状データ間の対応関係が静的に求められて三次元形状データ間の配置合わせが行われる。
【0081】
○実施形態1における配置合わせ可否判定処理の原理の概要:
次に、2つの形状データにICP法を適用して形状データ間の配置合わせを行う場合を例に、ICP法について説明する。ここで、これら2つの形状データがそれぞれ表す三次元形状は、相互に略同一の三次元形状を含んでおり、図8に示される個別形状データd2aおよびd2bのように、相互にずれて配置されているものとする。
【0082】
ICP法は、毎回の演算毎に配置合わせの基準となる基準形状データと配置合わせされる参照形状データとの対応関係を求め、その対応関係に基づいて各形状データがそれぞれ表す三次元形状の面と面との距離を短くする座標変換情報を求める。
【0083】
求められた座標変換情報に基づく座標変換を参照形状データに施すという座標変換情報の算出および座標変換を繰り返し行うことによって、各三次元形状間の面と面との距離が最小になるような座標変換情報を求めるアルゴリズムを基本とする手法であり、面と面との距離に応じて、その距離を短くする割合を変更する手法など各種の派生方法がある。
【0084】
従って、既述したように、例えば、凹凸の少ない平面状の三次元形状を表す形状データなど、形状データ間の適正な対応関係を求めにくい形状においては、ICP法を適用しても配置合わせに失敗する場合が多くなる。
【0085】
なお、三次元デジタイザ2が取得した形状データにおいては、取得された形状データに対する三次元デジタイザ2の存在方向が判別可能であるため、ICP法における基準形状データと参照形状データとの対応関係の取得は、通常、三次元デジタイザ2側のみから観察される各形状データの三次元形状に基づいて行われる。このため、表裏の誤認識に起因する誤った配置合わせが防止される。
【0086】
また、ICP法は、凹凸のある形状データについては、通常、各形状データが表す三次元形状間の距離の遠近など、各形状データ間の配置関係の影響をあまり受けることなく形状データ間の適切な対応関係を求めることができるので、多くの場合、各形状データ間の当初の配置関係に関わらず配置合わせを成功させることができる。この状態を図10および図11を参照しつつ説明する。
【0087】
図10は、2つの凹凸のある形状データ間の異なる配置関係の例を示す図である。ここでは、凹凸のある形状データとして図9に示された個別形状データd2aおよびd2bが採用されている。
【0088】
個別形状データd2aおよびd2bは、それぞれ配置合わせの基準となる基準形状データおよび配置合わせされる参照形状データとして設定されている。また、形状データe1およびe2は、それぞれ個別形状データd2bの配置を図中の矢印に沿ってずらすことにより生成されており各形状データd2b、e1およびe2は、同一形状を表わし、かつ、個別形状データd2aに対して、それぞれ異なった配置関係である。
【0089】
図11は、図10に示された各形状データd2b、e1およびe2が、ICP法によって配置合わせを試みられた結果、それぞれ形状データd2b’、e1’およびe2’として座標変換され、個別形状データd2aに適切に配置合わせされた状態を示している。
【0090】
このように、凹凸のある形状データ間では、通常、当初の配置関係の影響をほとんど受けることなくICP法によって、適切に配置合わせすることができ、配置合わせされた各形状データは、当初配置に関わらず、通常、略同一の配置に座標変換されている。
【0091】
これに対して、凹凸の少ない形状データ間にICP法を適用する場合には、形状データ間の対応関係を適切に求めることが困難であり、さらに、各データ間の当初の配置関係を変えると対応関係の取得にも影響が生じるため、各データ間の当初の配置のズレが大きくなるにつれて、対応関係も間違った対応関係がより設定されやすくなる。
【0092】
このため、凹凸の少ない形状データ間に複数の異なる当初の配置関係を設定して、各配置関係毎にICP法による配置合わせを試みると、通常、各配置関係毎に配置合わせが失敗するだけでなく、配置合わせ後の形状データの配置は、各配置関係毎に、ばらついてしまう。また、そのばらつき方は、当初の配置のズレが大きくなるにつれて、大きくなる。ここで、上述した配置合わせの失敗例を、図12を参照して説明する。
【0093】
図12は、凹凸の少ない円弧状の断面を有する三次元形状を表す形状データの配置合わせが失敗した例を示す図である。図12では、円弧状の断面を有する三次元形状を表す個別形状データd2fおよびd2gがあり、それぞれ配置合わせの基準となる基準形状データおよび配置合わせされる参照形状データとして設定されている。個別形状データd2gからは、その配置をずらした形状データe3およびe4が生成されており、各形状データd2g、e3およびe4が個別形状データd2fに対して配置合わせを試みられた結果、ICP法によってそれぞれ各形状データd2g’、e3’およびe4’に座標変換された様子を示している。
【0094】
図12に示される例では、各形状データd2g’、e3’およびe4’は、個別形状データd2fに対して、配置合わせが失敗しているとともに、それぞれの配置は相互にばらついている。
【0095】
なお、図10から図12をそれぞれ参照した上記説明においては、各形状データの形状は全て同じであり、配置のみが異なるという前提で説明したが、各形状データそれぞれの形状が相互に多少異なったものであっても配置合わせにおいては配置合わせ対象である形状データ間における略同一形状部の全体にわたって配置合わせの誤差が分散されるので、凹凸のある形状データ間および凹凸の少ない形状データ間のそれぞれについての配置合わせの結果は、通常、上述した配置合わせの結果と同様の結果となる。
【0096】
上記に説明したように、凹凸のある三次元形状を有する形状データ間のICP法による配置合わせにおいては、相互の配置関係が種々に異なったとしても、多少の形状の歪みの有無に関わらず、通常、配置関係にかかわらずほぼ同じ適切な配置に配置合わせされるのに対して、凹凸の少ない三次元形状を有する形状データ間のICP法による配置合わせにおいては、その相互の配置関係が種々に異なった場合、多少の形状の歪みの有無に関わらず、通常、配置合わせは失敗し、かつ、配置合わせされる参照形状データのそれぞれの配置合わせ後の配置は、相互にばらつきを生じ、そのばらつき方は、当初の配置のズレが大きくなるにつれて大きくなる。
【0097】
ここで、例えば、既述したように、図1に示された例では、配置合わせは失敗しているものの形状データが表す形状間の距離はほぼなくなっているため、配置合わせの基準となる基準形状データと配置合わせされる参照形状データとの相互関係に着目して配置合わせの成否(可否)を判定したとしても、必ずしも正しく判定することができない。
【0098】
しかし、例えば、図1に示される例であっても、基準形状データと参照形状データとの配置関係を種々に変更して、それぞれの配置関係毎に配置合わせを試みると、各配置関係に対応する参照形状データのそれぞれの配置についての相互関係は、上記に説明したように、通常、ばらついたものとなる。
【0099】
実施形態1に係る配置合わせ可否判定処理は、このばらつきに着目して、基準形状データと参照形状データとの正しい配置関係が不明である場合であっても、基準形状データに対する当初の配置が種々に異なる複数の参照形状データのそれぞれについて、基準形状データへの配置合わせを施したときに、これら複数の参照形状データについての形状配置のばらつきが少ない場合は、正しい配置への配置合わせが行われているとして配置合わせの可否を判定する処理である。
【0100】
具体的には、参照形状データから基準形状データに対してそれぞれ当初の形状配置が異なる複数の形状データを作成して、それぞれの形状データについて基準形状データへの配置合わせを試みた後、それぞれの形状データについての形状配置の相互関係を表す評価値を求めるとともに、この評価値と、配置合わせの成否を判定するための判定用閾値とを比較することによって配置合わせの可否を判定する。
【0101】
参照形状データが基準形状データに対して配置合わせ可能であると判定された場合は、参照形状データを得た三次元デジタイザ2についての装置配置の設定も適切であり、逆に、参照形状データが配置合わせ可能ではないと判定された場合には、三次元デジタイザ2についての装置配置の設定も適切ではないこととなる。
【0102】
なお、上述したように、この相互関係における配置のばらつきなどは、基準形状データと参照形状データとの配置のズレが大きくなるにつれて、通常、大きくなるので、配置のズレの与え方と判定用閾値とは、システムに対する要求に応じて適切に調整される。
【0103】
なお、配置合わせ可否判定処理における判定方法の詳細については、三次元形状処理装置100Aの説明において後述する。
【0104】
[三次元形状処理装置100A:]
図3は、実施形態に係る三次元形状データ処理装置100Aの各機能部の構成を例示するブロック図である。図3には、各機能部とともに、各機能部間で授受される主な情報が記載されている。また、制御信号などについての記載は省略されている。
【0105】
図3に示されるように、三次元形状処理装置100Aは、操作部4、表示部5、入出力部6、抽出部7、形状データ取得部10A、ズレ歪み付与部11、形状配置調整部12、配置合わせ可否判定部13A、記憶部14および制御処理部15を主に備えて構成される。
【0106】
三次元形状処理装置100Aは、三次元形状データ処理システム300Aの構成要素として機能する際には、供給される複数の判定用形状データd1が適正に配置合わせ可能なものであるか否かを判定する配置合わせ可否判定処理を行って、配置合わせ可能であると判定された判定用形状データd1に対応する装置配置情報を、三次元形状測定システム500Aが複数の個別形状データを測定するときの装置配置情報である第2の装置配置情報として求める処理などを行う。
【0107】
また、三次元形状処理装置100Aが、三次元形状測定システム500Aの構成要素として機能する際には、三次元形状処理装置100Aは、三次元デジタイザ2から供給される複数の個別形状データd2を、ICP法などを用いて配置合わせし、対象物1についての全体的な三次元形状を表す形状データを生成する処理などを行う。
【0108】
図3に示される操作部4は、例えば、キーボード、マウスおよび操作ボタンなどを備えて構成されており、制御処理部15への操作信号の入力や、部品番号などの対象物の識別情報の入力、三次元形状処理装置100Aの各部の制御および処理に使用される処理装置パラメータの設定、マニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20、三次元測定時の三次元デジタイザ2と対象物との距離を示す測定距離および測定範囲を示す画角などの測定パラメータd3の設定、および三次元デジタイザ2の装置配置情報d4の設定などの用途に使用され、設定された処理装置パラメータ、測定パラメータd3および装置配置情報d4などは、制御処理部15によって、記憶部14に記憶される。記憶された測定パラメータd3および装置配置情報d4は、必要時に制御処理部15によって取得されて、それぞれ三次元形状処理装置100Aの各部、三次元デジタイザ2およびマニピュレータ制御部3bに供給される。なお、処理装置パラメータとしては、後述する配置合わせ可否判定処理に用いられる判定閾値th1などが挙げられる。
【0109】
表示部5は、例えば液晶ディスプレイ、CRTなどで構成されて、動画などを表示可能であり、測定された形状データの三次元形状などの画像情報や、各種メッセージ、後述する配置合わせ可否判定処理の判定結果d21(図3)などが表示部5に表示される。また、操作部4から各種パラメータや装置配置情報などが入力される際には、これらの情報は表示部5に表示され、入力値の確認などに供される。
【0110】
入出力部6は、例えばマルチメディアドライブやネットワークのインタフェースなどを備えて構成され、光ディスクなどの記憶媒体9を受け付けるとともに、記憶媒体9およびネットワークを介した情報の授受を制御処理部15との間で行うものである。三次元デジタイザ2からの判定用形状データd1および個別形状データd2、ならびにCADシステム8からのCADデータd5は、三次元デジタイザ2およびCADシステム8からそれぞれ直接入力されるだけでなく、入出力部6によって、記憶媒体9や、ネットワーク経由でも入力され得る。
【0111】
記憶部14は、例えばハードディスク、ROMおよびRAMなどを備えて構成されており、配置合わせされた各種形状データおよび画像データなどの三次元形状処理装置100Aの各部が出力する情報、三次元形状処理装置100Aの各部を制御するために設定された処理装置パラメータ、対象物配置情報d20、測定パラメータd3および装置配置情報d4などの三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの各部に必要なパラメータ、ならびに三次元形状処理装置100Aの各部の動作を制御する制御プログラムなどの恒久的な記憶と、各種情報の一時的な記憶とに使用される。また、三次元デジタイザ2が、その測定した対象物の二次元画像から形状データへの変換を三次元形状処理装置100Aに処理させるタイプのものである場合には、その変換に必要な三次元化パラメータなども記憶部14に記憶される。
【0112】
三次元形状データ処理システム300Aが機能しているときは、配置調整可否判定処理において得られた配置調整済み参照形状データd16および基準形状データd6は、記憶部14に記憶された後、次の配置合わせ可否判定処理における基準形状データd6として用いられるべき判定用形状データd1として、制御処理部15を介して形状データ取得部10Aへと供給される。
【0113】
また、三次元形状測定システム500Aが機能しているときは、配置合わせされた個別形状データd2である配置合わせ済み個別形状データd17は、次の配置合わせにおいて基準形状データd6として用いられるべき個別形状データd2として、制御処理部15を介して形状データ取得部10Aへと供給される。
【0114】
なお、以下に説明する抽出部7、形状データ取得部10A、ズレ歪み付与部11、形状配置調整部12、配置合わせ可否判定部13Aおよび制御処理部15は、CPUで所定の制御プログラムを実行することで実現しても良いし、専用のハードウェア回路を用いて実現しても良い。
【0115】
○制御処理部15:
制御処理部15は、三次元形状処理装置100Aの他の機能部を制御および他の機能部との必要な情報の授受を行うとともに、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aを構成する三次元デジタイザ2、マニピュレータ制御部3bおよびCADシステム8の制御や、これらとの情報の授受などを行う。
【0116】
◎形状データ取得部10A:
○三次元形状データ処理システム300A機能時の形状データ取得部10A:
三次元形状データ処理システム300Aが機能しているときは、形状データ取得部10Aには、三次元デジタイザ2、抽出部7、および制御処理部15から、それぞれ三次元測定された対象物1の形状データ、CADシステム8から供給される対象物1についてのCADデータd5、および記憶部14に記憶されている原参照形状データd7に対応した配置調整済み参照形状データd16および基準形状データd6に基づいた複数の判定用形状データd1であって、1以上の判定用形状データと、それらの表す三次元形状の一部または全部と略同一の三次元形状を表す形状データをそれぞれ有する1以上の他の判定用形状データとを含んだ複数の判定用形状データd1が適宜供給される。
【0117】
形状データ取得部10Aは、供給された複数の判定用形状データd1から基準形状データd6と原参照形状データd7を取得して形状配置調整部12へ供給するとともに、原参照形状データd7をズレ歪み付与部11へ供給する。
【0118】
後述する配置合わせ可否判定処理の信頼性を高める観点から、判定用形状データは、三次元デジタイザ2によって測定されるべき形状データとできるだけ同一の形状を有することが望ましい。
【0119】
しかしながら、ICP法などの形状対応点に基づく配置合わせ方法においては形状データが表す形状間の重複部分が主に用いられること、および、形状の外縁部分を構成する形状データは、形状対応点に基づく配置合わせ方法ではあまり用いられないことなどから、三次元デジタイザ2によって測定されるべき形状データと、その形状データに対応する判定用形状データとが、それぞれ表す三次元形状が相互に多少異なっていたとしても本発明の有用性を損なうことはない。
【0120】
図13は、形状データ取得部10Aが複数の判定用形状データd1から基準形状データd6aおよび原参照形状データd7aを取得する様子を例示説明する図である。
【0121】
図13(a)では、装置配置情報d4aに対応して配置決めされ、測定範囲n1を有する三次元デジタイザ2が対象物1の三次元形状を測定した形状データが、判定用形状データd1aとして形状データ取得部10Aに供給されて、形状データ取得部10Aによって基準形状データd6aとして取得されることを示している。
【0122】
また、図13(b)では、装置配置情報d4bに対応して配置決めされ、測定範囲n2を有する三次元デジタイザ2が対象物1の三次元形状を測定した形状データが、判定用形状データd1bとして形状データ取得部10Aに供給されて、形状データ取得部10Aによって原参照形状データd7aとして取得されることを示している。
【0123】
なお、基準形状データd6aは、配置合わせの基準となる形状データである。例えば、形状検査用の形状データを取得するための一連の三次元測定のうち最初の三次元測定で得られるべき形状データに対応した判定用形状データを三次元測定またはCADデータに基づいて取得したものが基準形状データとして採用される。また、基準形状データd6aに対して既に配置合わせされて記憶部14に記憶されている原参照形状データd7は、新たな配置合わせのための基準形状データとして採用される。
【0124】
基準形状データは、表示部5に表示された複数の判定用形状データの中から、測定者が操作部4からの入力により設定してもよいし、上述のように、初回の三次元測定に対応する判定用形状データおよび既に配置合わせされた原参照形状データを、自動的に基準形状データとして設定してもよい。また、各判定用形状データの生成時に、基準形状データを設定して判別用データを付加し、該付加データを形状データ取得部10Aが取得することによって設定するなどしてもよい。
【0125】
また、原参照形状データd7aとしては、基準形状データd6aに対して配置合わせ可能か否かを未だ判定されていない判定用形状データが採用される。例えば、基準形状データが設定された後に、三次元測定またはCADデータに基づいて形状データ取得部10Aに供給される判定用形状データが、原参照形状データd7aとして設定される。
【0126】
図14および図15は、基準形状データと原参照形状データを例示する図である。図14および図15におけるn1〜n4は不図示の平面状の対象物上に設定された三次元デジタイザ2の測定範囲を、d1e〜d1hは判定用形状データを、d6e〜d6gは基準形状データを、d7e〜d7hは原参照形状データをそれぞれ示している。なお、本出願においては、形状データを座標値ではなく、その表す三次元形状を模式的に表示することによって示している。ここで、図14および図15における、例えば、n1(d1e)(d6e)という表記は、測定範囲n1に対応する判定用形状データd1eが形状データ取得部10Aに供給され、形状データ取得部10Aによって基準形状データd6eとして取得されることを示している。
【0127】
図14(a)は、測定範囲n1およびn2が部分的に重複することによって、基準形状データd6eと原参照形状データd7fが略同一の部分的な三次元形状を共有する例を示している。
【0128】
また、図14(b)は、原参照形状データd7fが表す三次元形状の中に、基準形状データd6eが表す三次元形状の全てが含まれる例を示す。このような関係は、例えば、先に高分解能で三次元測定された部分を基準として、その低解像度で三次元測定された周辺部の形状を位置合わせする場合などに採用される。
【0129】
また、図14(c)は、図14(b)と逆に、原参照形状データd7fが表す三次元形状の全てが、基準形状データd6eが表す三次元形状に含まれる例を示す。このような関係は、先に低解像度で三次元測定された大きな領域を基準として、その領域中の特徴部分を高解像度で三次元測定する場合などに採用される。
【0130】
また、図14(d)は、図14(c)に示される基準形状データd6eが表す三次元形状に、死角などによって生じた穴部SH1がある例を示す。このような関係は、その穴部を基準形状データd6eとは異なる方向から、より高解像度で死角が生じないように原参照形状データd7fによって測定し直す場合などに採用される。
【0131】
また、図15(a)は、コの字形の測定漏れ領域SH2を形成する3つの基準形状データd6e〜d6gに対して、測定漏れ領域SH2を1つの原参照形状データd7hが取得される例を示す。
【0132】
また、図15(b)は、2つの基準形状データd6eおよびd6fを完全に覆う測定範囲に対応した原参照形状データd7gが取得される例を示す。
【0133】
また、図15(c)は、部分的に重複する2つの測定範囲n1およびn2に対応する基準形状データd6eおよびd6fに対して、測定範囲n1およびn2とそれぞれ部分的に重複するとともに、相互に部分的に重複する測定範囲n3およびn4に対応する原参照形状データd7gおよびd7hが取得される例を示す。
【0134】
なお、複数の基準形状データd6(図3)が採用される場合は、後述する形状配置調整部12が行う形状配置の調整においては、複数の基準形状データd6の相互関係は変更されることなく原参照形状データd7(図3)との形状配置の調整が行われる。
【0135】
また、過去に行われた配置合わせ可否判定処理において配置合わせされた判定用形状データと、今の配置合わせ可否判定処理における各基準形状データd6との相互関係も、通常は変更されることがなく、配置合わせ可否判定処理が行われる。
【0136】
また、複数の原参照形状データd7が採用された場合、原参照形状データd7ごとに配置合わせ可否判定処理を行ってもよいし、複数の原参照形状データd7に対して同時に配置合わせ可否判定処理を実施して配置合わせ可否の判定を原参照形状データd7ごとに行うようにしてもよい。
【0137】
以上に説明したように、図3に示される形状データ取得部10Aは、対象物1についての複数の三次元形状をそれぞれ表す複数の判定用形状データd1のうち、1以上の判定用形状データd1を1以上の基準形状データd6として取得するとともに、1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状を表す形状データを有する他の判定用形状データd1を原参照形状データd7として取得する。
【0138】
また、基準形状データd6と原参照形状データd7とは、対象物1上で互いに重なる部分を有する各測定範囲についての対象物1の三次元形状をそれぞれ表している。
【0139】
○三次元形状測定システム500A機能時の形状データ取得部10A:
三次元形状測定システム500Aが機能しているときは、形状データ取得部10Aには、三次元デジタイザ2および制御処理部15から、それぞれ三次元デジタイザ2が対象物1の三次元形状を測定した形状データ、および記憶部14に記憶されている配置合わせ済み個別形状データd17に基づいた複数の個別形状データd2が適宜供給される。
【0140】
形状データ取得部10Aは、供給された複数の個別形状データd2から基準形状データd6と原参照形状データd7とを取得して形状配置調整部12へ供給する。
【0141】
◎抽出部7:
次に、CADデータに基づく判定用形状データの生成について説明する。図3に示される抽出部7は、三次元形状データ処理システム300Aが機能しているときに作動する機能部であり、不図示の入力インタフェースを介してCADシステム8と接続されている。抽出部7には、CADシステム8からCADデータd5が、制御処理部15からは測定パラメータd3、装置配置情報d4および対象物配置情報d20がそれぞれ入力される。
【0142】
抽出部7に供給されたCADデータd5は、先ず、対象物配置情報d20に基づいてマニピュレータ3aの台座部に対する対象物の配置に等しくなるように必要な座標変換が施され、次に、装置配置情報d4に基づいて配置された三次元デジタイザ2によって測定されるべき形状データと略同一の三次元形状を表す判定用形状データd1が座標変換されたCADデータd5から抽出される。この抽出処理は、測定パラメータd3、装置配置情報d4および対象物配置情報d20などに基づいて、行われる。
【0143】
また、CADデータd5の座標系を基準として、CADデータd5と対象物とが重なるように仮想三次元デジタイザ2iの配置を変更するなどしたのちに、CADデータd5に基づく判定用形状データd1を抽出するようにしてもよい。
【0144】
図16は、CADデータd5から判定用形状データd1を生成する様子を説明する図である。図16に示されるCADデータd5は、平面部位を表すCADデータd5d、該平面部位上に設けられた四角柱部位および円柱部位をそれぞれ表すCADデータd5a、d5c、およびCADデータd5dの外縁部を表すCADデータd5bによって構成されている。
【0145】
このようにCADシステム8から供給されるCADデータは、部品を形成する各部位単位で構成されていてもよいし、また、部品全体を1単位とするものであってもよい。部位単位のCADデータを用いる場合の必要な部位の指定については、例えば、部品単位のCADデータを対象物と同じ配置になるように座標変換したときに、測定パラメータd3および装置配置情報d4に基づいて求められる対象物上での三次元デジタイザ2の測定範囲に入る各部位のCADデータを、三次元形状処理装置100AからCADシステム8へ要求するなどして指定すればよい。
【0146】
抽出部7は、三次元デジタイザ2についての装置配置情報d4aに基づいて、CADデータd5の座標系に仮想的な三次元デジタイザ2を表す仮想三次元デジタイザ2iを想定するとともに、三次元デジタイザ2の測定パラメータd3に基づいて仮想三次元デジタイザ2iのカメラが備える撮像素子の各画素について、それぞれ仮想カメラ視線30を想定する。ここで、図16のn3は、仮想三次元デジタイザ2iの測定範囲を示す。
【0147】
仮想カメラ視線30が想定されると、抽出部7は、それぞれの仮想カメラ視線30について、CADデータd5との交点座標を求めることによって、CADデータd5から判定用形状データd1を生成する。
【0148】
なお、部品全体が細かく分割されて部位単位のCADデータの範囲が、三次元デジタイザ2の測定範囲より小さい、または同等の大きさである場合には、上述の仮想カメラ視線30を用いた抽出作業は不要であり、1以上の部位単位のCADデータは、そのまま判定用形状データd1として出力される。
【0149】
また、配置合わせ可否判定処理において、原参照形状データd7が配置合わせ可能ではないと判定された場合には、通常、原参照形状データd7に対応する判定用形状データd1を異なるものに変更して、配置合わせ可否判定処理をやり直す。
【0150】
ここで、CADデータd5から判定用形状データd1を生成する手法によれば、仮想三次元デジタイザ2iの装置配置情報を配置合わせ可能ではないと判定された原参照形状データd7を得た装置配置情報とは異なる装置配置情報に変更して新たに原参照形状データd7となるべき新たな判定用形状データd1を取得し直すことが容易になるとともに、判定用形状データd1の測定作業のために、三次元デジタイザ2を移動する時間や作業の手間を省くことができる。
【0151】
従って、例えば、この新たな判定用形状データd1の取得と、新たな判定用形状データd1に基づく配置合わせ可否判定処理とを、対象物についての形状データの取得を所望する部位の近傍において、配置合わせ可能であると判定される原参照形状データd7が得られるまで繰り返して行ったとしても、三次元デジタイザ2を用いて判定用形状データd1を得る場合に比べて所要時間を大幅に短縮することができる。
【0152】
また、例えば、あらかじめ複数の判定用形状データd1を得るための仮想三次元デジタイザ2iの装置配置情報d4を、測定パラメータd3、CADデータd5および対象物配置情報d20などに基づいて、対象物1についての形状検査に用いられる全体的な形状データを、測定漏れを生ずることがないように設定しておくとともに、上記の新たな判定用形状データd1をえるための装置配置情報d4のずらし量と方向とを予め設定しておけば、一度も三次元デジタイザ2による三次元測定を行うことなく、また、対象物1をも使用することなく、CADシステム8と三次元形状処理装置100Aのみによって、対象物1についての所望の全体的な形状データに対応する複数の判定用形状データd1を得ることができる。
【0153】
従って、得られた複数の判定用形状データd1に対応する仮想三次元デジタイザ2iの装置配置情報d4に基づいて、実際の対象物の形状検査工程における形状測定のための三次元デジタイザ2の装置配置情報d4を生成することができる。
【0154】
また、対象物1についての所望の全体的な形状データに対応する全ての判定用形状データd1が得られたか否かの判定においては、表示部5に表示された判定用形状データd1の配置結果などに基づいて測定者が目視によって判定してもよく、また、対象物1の全体を表すCADデータd5と、配置合わせされた判定用形状データd1とを、同一の座標系において重なるように座標変換し、対象物1の測定所望部分に対応する部分について、離散的に複数のチェック箇所を設け、各チェック箇所において所定の近傍内に配置合わせされた判定用形状データd1があるかないかを、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法における対応関係設定時のアルゴリズムを応用することして判定することによって、配置合わせ可否判定処理の作業の完了を自動的に検出してもよい。
【0155】
◎ズレ歪み付与部11:
図3に示されるズレ歪み付与部11は、三次元形状データ処理システム300Aが機能しているときに作動する機能部である。ズレ歪み付与部11は、形状データ取得部10Aから原参照形状データd7を供給されるとともに、制御処理部15から三次元デジタイザ2の測定精度d18およびマニピュレータ3aの配置決め精度d19を供給され、三次元形状の位置および姿勢を示す形状配置のズレ、ならびに三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが原参照形状データd7が表す三次元形状に付与された各三次元形状を、それぞれ表す1または複数のズレ歪み含有参照形状データd8を生成し、形状配置調整部12へと供給するとともに、ズレ歪み含有参照形状データd8の生成過程で形状配置の付与に用いられた形状配置ずらし変換M2を配置合わせ可否判定部13Aへと供給する。
【0156】
生成されるズレ歪み含有参照形状データd8の数が多いほど後述する形状配置調整部12において、多くの相互に異なった配置調整済み参照形状データd16を生成することができるので、個別形状データd2の測定に先立って数多くの配置合わせの試みを模擬することができ、配置合わせ可否判定処理の信頼性を高めることができる。
【0157】
ここで、配置合わせ可否判定処理の原理の概要において説明したように、三次元形状に付与される形状配置のズレおよび歪みについては、ズレおよび歪みが大きいほど、配置合わせ可否判定処理によって、配置合わせ可能であると判定された原参照形状データd7の判定に対する信頼性は高くなる。
【0158】
従って、システムの要求仕様などのために配置合わせ可能であるとの判定に対する信頼性をできるだけ高めたい場合などでは、例えば、安全係数をみこんで、個別形状データを取得する際に使用されるマニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18のそれぞれ数倍程度の配置のズレおよび歪みの少なくとも一方を、原参照形状データに付与するなどすることが望ましい。また、この場合、配置合わせ可否判定部13Aにおいて用いられる判定用閾値th1を、通常よりも配置合わせ可能であるとの判定がされにくい閾値とする変更を併用するなどしてもよい。
【0159】
また、例えば、配置合わせ可能であるとの判定が得られた判定に対する信頼性の向上と、配置合わせ可否判定処理の測定作業および処理のコストとのバランスをとることが、システムに要求されている場合には、例えば、マニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18とそれぞれ同程度の配置のズレおよび歪みを採用することが望ましい。
【0160】
この場合には、実際の三次元測定の状況により近い状況で配置合わせ可否判定処理の判定ができる。また、システムへの要求によっては、マニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18のよりも小さい配置のズレおよび歪みを採用してもよい。
【0161】
また、形状配置のズレは、実際に使用するマニピュレータ3aの配置決め精度d19に基づくことなく設定しても良い。例えば、一般的なマニピュレータの配置決め精度に基づいて適切な形状配置のズレを付与するなどしても、本発明の有用性を損なうものではない。
【0162】
同様に、三次元形状に付与される歪みについても三次元デジタイザ2の測定精度d18に基づくことなく適切な歪みを設定してもよい。
【0163】
また、例えば、多くの量産品の形状検査における事前のティーチング作業として配置合わせ可否判定処理を行う場合には、マニピュレータ3aの配置決め精度d19に加えて対象物配置情報d20と実際の対象物設置時との対象物の配置ズレの公差を更に加味して、配置のズレを設定するなどしてもよい。
【0164】
なお、三次元形状処理装置100A内のズレ歪み付与部11の他に、三次元デジタイザ2およびCADシステム8がそれぞれズレ歪み付与部として機能する場合があり、この場合には、生成されたズレ歪み含有参照形状データd8はそれぞれ不図示のデータ線を介して形状配置調整部12へと供給される。
【0165】
以下に、ズレ歪み付与部11の動作について、1つのズレ歪み含有参照形状データd8を生成する場合を例に図17〜図23を参照しつつ説明する。なお、複数のズレ歪み含有参照形状データd8を生成する場合には、1つのズレ歪み含有参照形状データd8を生成する場合と同様に生成すればよい。
【0166】
図17は、歪みの付与により生成されるズレ歪み含有参照形状データを例示する図である。なお、図17においては、三次元形状に付与される歪み量を、三次元形状の大きさに対して誇張して表示している。
【0167】
先ず、図17(a)においては、ズレ歪み付与部11が、円筒状の対象物についての原参照形状データd7iが表す三次元形状に対して歪みを付与することによって、ズレ歪み含有参照形状データd8iを生成している。
【0168】
具体的には、ズレ歪み付与部11は、原参照形状データd7iが表す形状の中央部を構成する形状データに対して、円筒の外部から内部へと変形する方向の歪みを発生させる形状歪み変換M1bを付与するとともに、原参照形状データd7iが表す形状の円筒の両端部を構成する形状データに対して、円筒の内部から外部へと変形する方向の歪みを発生させる形状歪み変換M1aおよびM1cを付与することによって、ズレ歪み含有参照形状データd8iを生成する。
【0169】
また、図17(b)においては、ズレ歪み付与部11が、凹凸を持つ対象物についての原参照形状データd7jが表す三次元形状に対して歪みを付与することによって、ズレ歪み含有参照形状データd8jを生成している。
【0170】
具体的には、ズレ歪み付与部11は、原参照形状データd7jが表す形状の中央部を構成する形状データに対して、局所的な歪みを発生させる形状歪み変換M1dを付与することによって、局所的な凸形状を表す形状データd8hjを有するズレ歪み含有参照形状データd8jを生成する。なお、図17(b)においては、原参照形状データd7jとズレ歪み含有参照形状データd8jとを便宜上僅かにずらして表示している。
【0171】
図17(a)における形状歪み変換M1a、M1bおよびM1cは、これらの変換が施される原参照形状データd7aの部位をそれぞれ構成する各三次元座標を変動させる変換として求めることができる。
【0172】
また、図17(b)における形状歪み変換M1dは、この変換が施される原参照形状データd7jの部位をそれぞれ構成する各三次元座標を変動させる変換として求めることができる。
【0173】
ここで、後述する形状配置のズレを付与する変換では、ズレを付与される形状データを構成する全ての各三次元座標に対して、同じアフィン変換が施されることによって、その形状データが表す三次元形状は保たれたまま、すなわち、歪みを生ずることなく、回転および平行移動することで形状配置のズレが付与されるが、例えば、図17(a)に例示される歪みの付与においては、形状歪み変換M1aおよびM1cと、形状歪み変換M1cとは形状データを構成する各三次元座標を変動させる方向が大きく異なっている。
【0174】
また各形状歪み変換がそれぞれ付与される部位毎に、全く同じ変換がその部位を構成する各三次元座標に対して与えられてもよいし、それら各三次元座標のそれぞれに対して多少異なる変換が付与されてもよい。
【0175】
図18および図19は、三次元形状データ処理システム300Aの三次元デジタイザ2がズレ歪み付与部11として機能して、原参照形状データd7aに対するズレ歪み含有参照形状データd8a’を三次元測定によって生成する様子を説明する図である。なお、三次元デジタイザ2をズレ歪み付与部11として機能させる場合のマニピュレータ3aの配置決め精度d19に求められる条件については、配置合わせ可否判定部13Aの説明において後述する。
【0176】
図18および図19に示されるように、三次元デジタイザ2は、装置配置情報d4bおよびd4b’に基づいて配置決めされており、測定範囲n2およびn2’によって対象物1を三次元測定している。
【0177】
図18に示される原参照形状データd7aは、装置配置情報d4bに基づいて配置された三次元デジタイザ2によって測定された形状データである。また、図19に示されるズレ歪み含有参照形状データd8a’は、装置配置情報d4b’に基づいて配置された三次元デジタイザ2によって測定された形状データである。
【0178】
このように三次元デジタイザ2をズレ歪み付与部11として機能させることによって、装置配置情報d4bに対する三次元デジタイザ2の配置のズレを設定し、この配置のズレに起因する形状配置のズレが原参照形状データd7aに付与されたズレ歪み含有参照形状データd8a’を取得することができる。
【0179】
三次元デジタイザ2をズレ歪み付与部11として機能させる場合は、多くのズレ歪み含有参照形状データd8a’を生成するためには、三次元デジタイザ2を多くの装置配置情報に基づいて実際に配置して形状データを測定する必要があるため、所要時間が長くなるが、最初の対象物に基づくティーチングの所要時間が長くなったとしても、以降の対象物の測定においてはティーチングの結果に基づいて短時間で三次元測定を行うことができるため、本発明の有用性を損なうものではない。
【0180】
次に、図19に示された三次元測定によって得られたズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データを演算によって生成する手法を説明する。
【0181】
図20は、図18および図19で説明した原参照形状データd7aとズレ歪み含有参照形状データd8a’との関係を説明する図である。ここでΔ1およびΔ2はそれぞれ、測定範囲n2およびn2’の相互のズレを示している。
【0182】
図20に示されるように、原参照形状データd7aとズレ歪み含有参照形状データd8a’とは、対象物1についての略同一の部分の三次元形状を表す形状データであり、その相違部分は、測定範囲のズレΔ1およびΔ2に対応した小さな領域である。既述したように、例えば、この相違部分が基準形状データd6と原参照形状データd7aとの略同一形状部分の中の一部分であるような場合には、ICP法などによる配置合わせにはほとんど影響を与えない。このため、原参照形状データd7aを座標変換することによって、ズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データを生成することが可能となる。
【0183】
図21は、図20に示された三次元デジタイザ2についての装置配置の変動を説明する図である。
【0184】
図21に示される座標系XYZおよびX’Y’Z’は、それぞれ装置配置情報d4bおよびd4b’に基づいて配置された三次元デジタイザ2が測定した形状データの各三次元座標を表す当初の座標系であるローカル座標系を表わしている。
【0185】
なお、本出願に係る図面においては、三次元デジタイザ2の装置配置情報に対応する箇所を示す印として各三次元デジタイザを示す図中に記載されている丸印が、各三次元デジタイザのローカル座標系の原点であり、ローカル座標系の向きと、各装置の位置および姿勢を示す装置配置情報の姿勢を表す座標系の向きとは一致しているものとする。
【0186】
従って、図21では、装置配置情報d4bの姿勢をZ軸まわりに角度θ1回転させた後、平行移動T1を付与することによって、装置配置情報d4b’が与えられる例が示されている。
【0187】
図22および図23は、配置ズレを付与されたズレ歪み含有参照形状データd8a(図23)を演算によって生成する様子を説明する図である。
【0188】
図22に示される原参照形状データd7aおよびズレ歪み含有参照形状データd8a’は、三次元デジタイザ2を用いた三次元測定によってそれぞれ取得された図20に示される原参照形状データd7aおよびズレ歪み含有参照形状データd8a’を装置配置情報d4bおよびd4b’の関係に基づいて1の座標系に座標変換して表示したものである。
【0189】
この座標変換は、三次元測定により得られたズレ歪み含有参照形状データd8a’を、装置配置情報d4b’についてのZ軸(図21のZ’軸)の周りに、角度−θ1回転させた後、−T1平行移動させることによって得ることができる。
【0190】
図23は、図22に示される原参照形状データd7aがズレ歪み含有参照形状データd8a’にできるだけ重なるように、原参照形状データd7aに対して形状配置ずらし変換M2を施すことによって生成されたズレ歪み含有参照形状データd8aを、図22に追加して表示した様子を表している。なお、図23の表示では、視認性を高めるためにズレ歪み含有参照形状データd8a’とズレ歪み含有参照形状データd8aとは便宜上僅かにずらして表示されている。
【0191】
ここでは、ズレ歪み含有参照形状データd8aを得る形状配置ずらし変換M2は、原参照形状データd7aを−T1平行移動した後、Z軸周りに角度−θ1回転させる変換として求められる。
【0192】
この例のように、形状配置ずらし変換M2は、(1)式または(2)式の形式で表現されるアフィン変換で表現される。
【0193】
【数1】

【0194】
ここで、原参照形状データd7aからのズレ歪み含有参照形状データd8aの生成においては、原参照形状データd7aの構成する全ての各三次元座標のそれぞれついて、同一のアフィン変換である形状配置ずらし変換M2を施すことによって生成することができる。
【0195】
このように、元の配置からZ軸周りに角度−θ1回転させた後、−T1平行移動させる配置のズレが与えられた三次元デジタイザ2によって、実際に三次元測定によって取得されるズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データd8aは、元の配置にある三次元デジタイザ2によって測定されるべき原参照形状データd7aを−T1平行移動した後、Z軸周りに角度−θ1回転させる演算によって生成することができる。
【0196】
演算によってズレ歪み含有参照形状データを生成することにより、三次元測定によってズレ歪み含有参照形状データを生成する場合に比べて数多くのズレ歪み含有参照形状データを短時間で生成することができるので、ズレ歪み含有参照形状データの個数を増やすことが容易となり、後述する配置合わせ可能形状データであると判定された原参照形状データに対応する装置配置情報に基づいて実際に取得された個別形状データの配置合わせが成功する確率を高めることができる。
【0197】
以上に説明した図18〜図23に係る説明では、実測された原参照形状データd7aに基づく演算によりズレ歪み含有参照形状データを生成する手法と、実測によってズレ歪み含有参照形状データを生成する手法とを説明したが、図16を用いて説明したように、原参照形状データをCADデータから生成し、その原参照形状データを座標変換する演算によってズレ歪み含有参照形状データを生成してもよい。また、ズレ歪み含有参照形状データを原参照形状データに基づく座標変換ではなく、装置配置がずらされた複数の仮想三次元デジタイザを必要なズレ歪み含有参照形状データの個数に応じて想定し、CADデータに基づいてそれぞれの仮想三次元デジタイザに対応するズレ歪み含有参照形状データを生成しても良い。
【0198】
また、基準形状データ、原参照形状データおよびズレ歪み含有参照形状データに対応する判定用形状データの全てをCADデータに基づいて生成すれば、三次元デジタイザ2を一度も用いることなく、後述する配置合わせ可否判定処理を行って個別形状データを得るための装置配置情報を生成することができので、三次元測定作業を省くことができ作業コストを抑制することができる。
【0199】
また、複数のズレ歪み含有参照形状データのいくつかをCADデータから生成し、残りを実測もしくは、実測した基準形状データから生成してもよい。CADデータから生成されたズレ歪み含有参照形状データについては、その生成時間を短縮することができ、実測した原参照形状データに基づいて、または実測によってズレ歪み含有参照形状データを生成する場合には、反射率や粗さなどの対象物の表面状態が実際の三次元測定に与える影響を反映した状態で配置合わせの可否を判定できる。
【0200】
また、1つのズレ歪み含有参照形状データに対して、形状配置のズレと、形状の歪みとは、それぞれ単独で付与されても良いし、両方が付与されていてもよい。
【0201】
また、歪みを付与するタイミングは、全てのズレ歪み含有参照形状データに同一の歪みを付与する場合には、例えば、原参照形状データに先ず、歪みを付与してから、次に配置のズレを付与してズレ歪み含有参照形状データを生成してもよい。
【0202】
以上に説明したように、ズレ歪み付与部11は、形状データが表す三次元形状の位置および姿勢を示す形状配置のズレ、ならびに形状データが表す三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが、図3に示される原参照形状データd7が表す三次元形状である原参照三次元形状に付与された各三次元形状を、それぞれ表す1または複数のズレ歪み含有参照形状データd8を生成する。
【0203】
◎形状配置調整部12:
○三次元形状データ処理システム300A機能時の形状配置調整部12:
三次元形状データ処理システム300Aが機能しているときは、図3に示される形状配置調整部12は、形状データ取得部10Aから基準形状データd6および原参照形状データd7を、ズレ歪み付与部11からズレ歪み含有参照形状データd8を、制御処理部15から装置配置情報d4をそれぞれ供給されて、これらのデータに基づいて複数の配置調整済み参照形状データd16を生成して、基準形状データd6とともに表示部5への表示に供するなどするために記憶部14へと供給する。また、複数の配置調整済み参照形状データd16を生成する過程で得られた複数の形状配置合わせ変換M3を配置合わせ可否判定部13Aへと供給する処理を行う。
【0204】
また、既述したように、複数の配置調整済み参照形状データd16のうち、配置合わせ可能であると判定された原参照形状データd7に対応する形状データは、基準形状データd6とともに新たな配置合わせ可否判定処理における判定用形状データd1(通常は、基準形状データd6として使用される)として用いられる。
【0205】
以下に、形状配置調整部12の動作について、図24〜図28を参照しつつ説明する。なお、図24から図28においては、三次元形状間の配置ずれ量を、三次元形状の大きさに対して誇張して表示している。
【0206】
図24は、基準形状データd6a、原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bが1の座標系に変換された様子を説明する図である。ここでは、これらの各データは、基準形状データd6aおよび原参照形状データd7aにそれぞれ対応する装置配置情報d4に基づいて、形状配置調整部12によって、1の座標系に変換されている。
【0207】
ここで、基準形状データd6aと、原参照形状データd7aとのズレは、既述したようにマニピュレータ3aの配置決めの誤差などに起因するものである。また、ズレ歪み含有参照形状データd8aおよびd8bは、ズレ歪み付与部11において、原参照形状データd7aに対してそれぞれ異なる形状配置ずらし変換M2aおよびM2bが付与されたことによって生成されており、原参照形状データd7aと、ズレ歪み含有参照形状データd8aおよびd8bとのズレは、形状配置ずらし変換M2aおよびM2bによるものである。
【0208】
なお、ここでの形状配置ずらし変換M2aおよびM2bにおいては、それぞれ(1)式または(2)式における変換行列が異なったものとなる。
【0209】
また、不図示の形状歪み変換がさらに付与されることによってズレ歪み含有参照形状データd8aおよびd8bに形状の歪みがさらに付与されていてもよい。
【0210】
図25は、配置調整済み参照形状データd16a、d16b、およびd16c(図26)が生成される過程を例示する図である。図25では、図24に示された原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bが1の座標系において基準形状データd6aになるべく重なるように、形状配置調整部12が、原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bに対してそれぞれ形状配置合わせ変換M3a、M3bおよびM3cを施すことによって、配置の調整を試みる様子を示している。
【0211】
図26は、配置合わせが成功した配置調整済み参照形状データd16a、d16bおよびd16cを例示する図である。配置調整済み参照形状データd16a、d16bおよびd16cは、それぞれ図25に示される原参照形状データd7a、ズレ歪み含有参照形状データd8a、およびd8bがそれぞれ形状配置合わせ変換M3a、M3bおよびM3cによって、基準形状データd6aに適切に配置合わせされた形状データである。
【0212】
図27は、配置合わせが失敗した配置調整済み参照形状データd16d、d16eおよびd16fを例示する図である。
【0213】
図27では、基準形状データd6cおよび原参照形状データd7cが凹凸の少ない円筒状の三次元形状を有している。また、原参照形状データd7cに対して形状配置ずらし変換M2aおよびM2bがそれぞれ施されることによってズレ歪み含有参照形状データd8cおよびd8dが生成されている。
【0214】
原参照形状データd7cならびにズレ歪み含有参照形状データd8cおよびd8dに対して、図26に示された例と同様に、それぞれ形状配置合わせ変換M3a、M3bおよびM3cが施されることにより基準形状データd6aへの配置合わせが試みられた結果、配置調整済み参照形状データd16d、d16eおよびd16fがそれぞれ生成されているが、これらは基準形状データd6cに重なっていない。
【0215】
すなわち、ここでは、凹凸の少ない形状間の配置合わせが試みられたため、配置合わせが失敗している。
【0216】
形状配置合わせ変換M3a、M3bおよびM3cは、配置合わせの結果に関わらず、それぞれ形状配置合わせ変換M3(図3)として配置合わせ可否判定部13Aへと供給されて、配置合わせ可否判定処理に供せられる。また、配置調整済み参照形状データd16a、d16bおよびd16cも配置合わせの結果に関わらず、それぞれ配置調整済み参照形状データd16として基準形状データd6とともに記憶部14へと供給された後、表示部5に表示されて測定者の目視による配置合わせ可否の判定などに供せられる。
【0217】
上述したように、原参照形状データd7aを用いて複数の配置調整済み参照形状データd16を生成する場合には、ズレ歪み付与部11において、1以上のズレ歪み含有参照形状データd8を生成し、形状配置調整部12において、生成された1以上のズレ歪み含有参照形状データd8と原参照形状データd7とに対して基準形状データd6への配置合わせを試みればよい。
【0218】
次に、原参照形状データd7aに対して、形状配置合わせ変換M3aが適用されない場合、すなわち、原参照形状データd7aに対して、基準形状データd6aへの配置合わせが試みられない場合を説明する。
【0219】
図28は、原参照形状データd7aが用いられることなく配置調整済み参照形状データd16bおよびd16cが生成される過程を例示する図である。図28において、ズレ歪み含有参照形状データd8aおよびd8bは、原参照形状データd7aに対して、それぞれ形状配置ずらし変換M2aおよびM2bが付与されることによって生成された形状データであり、形状配置ずらし変換M2aおよびM2bに対して形状配置合わせ変換M3bおよびM3cがそれぞれ施されることによって配置調整済み参照形状データd16bおよびd16cが生成されている。
【0220】
このように、原参照形状データd7aを用いることなく複数の配置調整済み参照形状データd16を生成する場合には、ズレ歪み付与部11において、複数のズレ歪み含有参照形状データd8を生成し、形状配置調整部12において、生成された複数のズレ歪み含有参照形状データd8に対して基準形状データd6への配置合わせを試みればよい。
【0221】
以上に説明したように、形状配置調整部12は、図3に示される原参照形状データd7および、1または複数のズレ歪み含有参照形状データd8、あるいは、複数のズレ歪み含有参照形状データd8がそれぞれ表す各三次元形状についての略同一の三次元形状が、1の座標系において1以上の基準形状データd6が表す三次元形状になるべく重ね合わせられるように、原参照形状データd7と、1または複数のズレ歪み含有参照形状データd8とが表す各三次元形状についての複数の形状配置、あるいは複数のズレ歪み含有参照形状データd8が表す各三次元形状についての複数の形状配置のそれぞれを調整することによって、複数の配置調整済み参照形状データ16を生成する。
【0222】
○三次元形状測定システム500A機能時の形状配置調整部12:
三次元形状処理装置100Aが、三次元形状測定システム500Aの機能要素となる場合には、形状配置調整部12は、個別形状データd2に基づく基準形状データd6および原参照形状データd7の供給を形状データ取得部10Aから受けて、基準形状データd6と原参照形状データd7についての配置合わせを行って配置合わせ済み個別形状データd17を生成し、記憶部14へと供給する。
【0223】
◎配置合わせ可否判定部13A:
図3に示される配置合わせ可否判定部13Aは、三次元形状データ処理システム300Aが機能しているときに作動する機能部である。配置合わせ可否判定部13Aは、ズレ歪み付与部11および形状配置調整部12からそれぞれ形状配置ずらし変換M2および形状配置合わせ変換M3を表す変換行列を供給されて、これらの変換行列に基づいて、形状配置調整部12において生成された複数の配置調整済み参照形状データd16についての形状配置の相互関係を表す評価値を求め、この評価値を判定用閾値th1と比較することにより、原参照形状データd7が、形状データ取得部10Aから形状配置調整部12へと供給された1以上の基準形状データd6に配置合わせされることによって、基準形状データd6とともに対象物についての1の全体的な三次元形状を表すように形状配置を調整することができる配置合わせ可能形状データであるか否かを判定する配置合わせ可否判定処理を行う。なお、判定用閾値th1は、記憶部14に記憶されており、制御処理部15から配置合わせ可否判定部13Aへ供給される。
【0224】
また、原参照形状データd7が、配置合わせ可能形状データであるか否か、すなわち原参照形状データd7の配置合わせが適切にできるか否かを判定した判定結果d21は、制御処理部15へと供給されて、表示部5に表示される。
【0225】
判定結果d21が表示部5に表示されることによって、測定者は、表示部5に表示された配置調整済み参照形状データd16および基準形状データd6の表示状態を種々に変更しつつ目視による配置合わせの確認をする必要が無くなり、客観的な数値によって配置合わせの可否(成否)を判断できるので、目視による判定の誤りを防止することができるとともに、作業効率を向上させることができる。
【0226】
次に、図25に示された形状配置ずらし変換および形状配置合わせ変換を用いて、複数の配置調整済み参照形状データd16についての形状配置の相互関係を表す評価値を求める手法の例を説明する。
【0227】
図25に示される形状配置合わせ変換M3a、形状配置ずらし変換M2aおよび形状配置合わせ変換M3b、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cは、それぞれ、配置調整済み参照形状データd16a、d16bおよびd16c(図26)が、原参照形状データd7から生成される過程における、各配置調整済み参照形状データについての「形状配置の変動情報」を表わしている。
【0228】
ここで、形状配置合わせ変換M3a、ならび形状配置ずらし変換M2aおよび形状配置合わせ変換M3bの合成変換M3b*M2a、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cの合成変換M3c*M2bは、それぞれ、原参照形状データd7aについての形状配置を基準とした配置調整済み参照形状データd16a、d16b、およびd16cについての相対的な形状配置、すなわち、各配置調整済み参照形状データについての形状配置の相互関係を表わしている。
【0229】
なお、合成変換に使用されている記号*は、行列と行列の積を表わしており、記号*の左右の変換を(1)式で表わしたときの各変換を表す変換行列の積によって、合成変換を表す変換行列が求められている。
【0230】
図26に示されるように配置合わせが成功する場合は、任意の形状配置に対する配置調整済み参照形状データd16a、d16b、およびd16cのそれぞれの相対的な形状配置は略同一となるので、変換M3a、合成変換M3b*M2a、および合成変換M3c*M2b(それぞれ「相対的形状配置変換」と称する)をそれぞれ表す複数の変換行列は略同一の変換行列となる。
【0231】
しかし、図27に示されるように配置合わせが失敗した場合は、配置調整済み参照形状データd16a、d16b、およびd16cについての相対的形状配置変換をそれぞれ表す複数の変換行列は略同一の変換行列とはならない。
【0232】
従って、配置合わせ可否判定処理の原理の概要において説明したように、それぞれの相対的形状配置変換に基づいて、複数の配置調整済み参照形状データd16の基準形状データd6に対する配置合わせが成功しているか否か、すなわち、基準形状データd6と原参照形状データd7とが所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを判定することができるとともに、原参照形状データd7を得た三次元デジタイザ2の装置配置情報d4についても適切であったか否かを判定することもできる。
【0233】
なお、図28に示される例のように、形状配置調整部12において原参照形状データd7aが基準形状データd6aへの配置合わせを試みられなかった場合においても、図25に示される例と同様に、合成変換M3b*M2aおよび合成変換M3c*M2bとして与えられる相対的形状配置変換によって、原参照形状データd7aについての形状配置を基準とした配置調整済み参照形状データd16bおよびd16cについての相対的な形状配置を表すことができる。
【0234】
次に、相対的形状配置変換として表された、複数の配置調整済み参照形状データd16についての形状配置の相互関係を評価するための評価値を求め、複数の配置調整済み参照形状データd16の配置合わせが成功したか否かを判定する手法を説明する。
【0235】
具体的な判定手法としてはいくつかあるが、1つ目の判定手法の例として、例えば、相対的形状配置変換をそれぞれ表す各変換行列の各対応する成分同士の偏差を配置情報の相互関係を表す評価値として求めて判定用閾値th1と比較し、評価値が判定用閾値th1以下であれば配置合わせが成功したと判定し、そうでなければ、配置合わせが失敗したと判定する手法を採用し得る。
【0236】
また、2つ目の判定手法の例として、相対的形状配置変換をそれぞれ表す各変換行列の各対応する成分毎に最大値と最小値との差をそれぞれ配置情報の相互関係を表す評価値として求めて、判定用閾値th1と比較し、各評価値が判定用閾値th1以下であれば配置合わせが成功したと判定し、そうでなければ、配置合わせが失敗したと判定する手法を採用し得る。また、これらの手法の他に、1つ目と2つ目の判定手法を併用するなど各種の手法が採用され得る。
【0237】
また、変換行列のうち、回転を表す要素と、平行移動を表す要素とを(2)式のように分けて、それぞれ毎に配置情報の相互関係を表す評価値を求めてもよく、また、対象物の表面状態、大きさなどの対象物の状態や、測定距離、画角などの三次元デジタイザ2の状態に応じて評価値を求める手法を変更してもよい。
【0238】
また、判定用閾値th1としては、変換行列の要素毎に判定用閾値を設定しても良いし、例えば、変換行列のうち、回転を表す要素と、平行移動を表す要素とで、異なる判定用閾値th1を採用する手法、また、対象物に対する検査規格、対象物の表面状態および大きさなどの対象物の状態や、測定距離および画角などの三次元デジタイザ2の状態に応じて判定用閾値th1を適宜変更するなど、判定用閾値th1の設定については各種設定方法を取り得る。
【0239】
なお、上述の説明例では、基準形状データd6についての形状配置を基準とした配置調整済み参照形状データd16についての相対的な形状配置を例に説明したが、例えば、図25の例では、ズレ歪み含有参照形状データd8bについての形状配置を基準とすると、配置調整済み参照形状データd16a、d16b、およびd16cについての相対的な形状配置をそれぞれ表す相対的形状配置変換は、M3a*M2b-1、およびM3b*M2a*M2b-1、およびM3cとなる。なお、M2b-1は、M2bの逆変換を表す。
【0240】
これらの相対的形状配置変換は、原参照形状データd7aを基準とした各配置調整済み参照形状データの形状配置を与える相対的形状配置変換M2a、M3b*M2a、およびM3c*M2bのそれぞれに、ズレ歪み含有参照形状データd8bを基準とした原参照形状データd7aの形状配置を与える相対的形状配置変換M2b-1を合成した変換である。
【0241】
このように、配置調整済み参照形状データd16a、d16bおよびd16cが原参照形状データd7から生成される過程における、各配置調整済み参照形状データについてのそれぞれの形状配置の変動情報である、形状配置合わせ変換M3a、形状配置ずらし変換M2aおよび形状配置合わせ変換M3b、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cのそれぞれを用いることによって、形状配置、装置配置、その他の座標空間における任意の配置を基準とする各配置調整済み参照形状データについての相対的な形状配置を与える相対的形状配置変換を表すことができる。また、座標間の関係が既知であれば、配置調整済み参照形状データが存在している座標系とは異なる座標系における配置を基準とすることもできる。
【0242】
また、座標空間における任意の配置を基準とする各配置調整済み参照形状データの形状配置間の相互関係は、原参照形状データd7aを基準とする各配置調整済み参照形状データの形状配置の相互関係と等しくなる。
【0243】
以上に説明したように、配置合わせ可否判定部13Aは、原参照形状データd7が、1以上の基準形状データd6と原参照形状データd7とが対象物1についての1の全体的な三次元形状を表すように、原参照形状データd7についての形状配置を調整することができる配置合わせ可能形状データであるか否かを、原参照形状データd7からそれぞれ生成された複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係に基づいて判定する判定処理を行う。
【0244】
該相互関係に基づいて原参照形状データd7についての配置合わせの可否を判定する手法を採用すれば、対象物上の測定範囲に含まれる三次元形状を表現する原参照形状データd7に基づいて生成された1以上の歪み含有参照マーカ位置データd14および基準形状データd6、あるいは、複数の歪み含有参照マーカ位置データd14である複数の第3形状データが、原参照形状データd7の測定範囲と重なる測定範囲の三次元形状を表現した基準形状データd6に対して配置合わせされた後の複数の配置調整済み参照形状データd16についての形状配置の相互関係に基づいて、基準形状データd6と原参照形状データd7とが配置合わせによって所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定する。
【0245】
従って、基準形状データd6と原参照形状データd7との相互関係によっては、基準形状データd6と原参照形状データd7とが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0246】
また、配置合わせ可否判定部13Aは、この相互関係を、例えば、複数の配置調整済み参照形状データd16のそれぞれが原参照形状データd7から生成される過程における各配置調整済み参照形状データd16についての形状配置の変動情報に基づいて求める手法を採用し得る。なお、各配置調整済み参照形状データd16についての形状配置の変動情報については、ICP法を用いた逐次の演算の過程において、最終的な配置の各配置調整済み参照形状データd16を求める前に、この形状配置の変動情報が求められる。言い換えれば、最終的な配置の各配置調整済み参照形状データd16を求めなくても、この形状配置の変動情報を求めることができ、配置合わせの可否を判定することができる。
【0247】
形状配置の変動情報に基づいて相互関係を求める手法を採用すれば、生成された複数の配置調整済み参照形状データd16がそれぞれ表す三次元形状間の形状配置を解析するなどして該相互関係を求める必要が無く、配置調整済み参照形状データd16が生成される過程における形状配置の変動情報に基づいて該相互関係を求めることができるので、原参照形状データd7の形状に関わらず、正確な相互関係を求めることができ、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0248】
なお、生成された複数の配置調整済み参照形状データd16自体を解析することによって、各配置調整済み参照形状データd16についての形状配置の相互関係を求める手法としては、例えば、同一直線上にない3点以上の局所的な凹凸などの特徴部が原参照形状データd7にある場合には、該3点以上の特徴点にそれぞれ対応する複数の配置調整済み参照形状データd16についての3点以上の特徴点によって定められる形状間の相互関係に基づいて、複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係を求める手法などを採用し得る。
【0249】
この場合には、各配置調整済み参照形状データd16についての形状配置の変動情報を保存していない場合であっても、各配置調整済み参照形状データd16についての形状配置の相互関係を求めることができる。
【0250】
また、該3点以上の特徴点は、基準形状データd6と原参照形状データd7とについての測定範囲の重複部分に限られず、原参照形状データd7の全体において探索することができる。
【0251】
ここで、三次元デジタイザ2をズレ歪み付与部11として機能させる場合のマニピュレータ3aの配置決め精度に求められる条件について説明する。三次元デジタイザ2をズレ歪み付与部11として機能させる場合には、三次元デジタイザ2を配置決めする装置配置情報d4に基づいて形状配置ずらし変換M2を求める必要があるため、マニピュレータ3aの配置決め精度が悪ければ、求めた形状配置ずらし変換M2に実際の値との誤差を生じてしまうため判定結果10が誤ったものとなるおそれがある。
【0252】
従って、三次元デジタイザ2をズレ歪み付与部11として機能させる場合には、マニピュレータ3aの配置決め精度にのみに基づいて異なる複数の形状配置ずらし変換を模擬的に生成し、これらの形状配置ずらし変換から、生成される配置調整済み参照形状データd16についての相互関係の評価値を求めたときに、この評価値が判定用閾値th1よりも、例えば1/3以下程度に小さい必要がある。
【0253】
多くの場合では、この条件が満たされるため三次元デジタイザ2をズレ歪み付与部11として機能させることができる。また、ティーチング時の三次元測定では、量産品の形状検査時の三次元測定で実際に用いられるマニピュレータよりも配置決め精度が高いマニピュレータを用いれば、この条件は容易に満たされ得ることからも三次元デジタイザ2をズレ歪み付与部11として機能させることができる。
【0254】
上述した判定方法においては、各配置調整済み参照形状データd16の形状配置の相互関係に着目して配置合わせの可否を判定したが、各配置調整済み参照形状データd16に対応する各装置配置情報d4に着目することによって配置合わせの可否を判定してもよい。
【0255】
具体的には、例えば、各配置調整済み参照形状データd16に対応する各装置配置情報、すなわち、各配置調整済み参照形状データd16についての形状配置の変動情報に基づいて推定される各ズレ歪み含有参照形状データd8についての各装置配置情報を求め、求められた各装置配置情報のばらつきが、所定の範囲に入るか否かを判定することによって原参照形状データd7についての配置合わせの可否を判定してもよい。
【0256】
また、推定された各ズレ歪み含有参照形状データd8についての各装置配置情報のそれぞれと、各ズレ歪み含有参照形状データd8を生成した際に設定された各装置配置情報のそれぞれとの差異が、所定の範囲に入るか否かを判定することによって原参照形状データd7についての配置合わせの可否を判定してもよい。
【0257】
[実施形態1に係る装置およびシステムの動作フロー:]
次に、図29から図31に示されるフローチャートを用いて三次元形状測定システム500A、三次元形状データ処理システム300Aおよび三次元形状処理装置100Aの動作フローを説明する。
【0258】
図29は、三次元形状測定システム500Aによって行われる、対象物1の全体的な三次元形状を表す形状データを生成する手順ステップS1の概要を例示するフローチャートである。
【0259】
三次元形状測定システム500Aは、先ず三次元形状データ処理システム300Aとして機能することにより、対象物1についての全体的な形状データとして配置合わせされる複数の個別形状データd2を三次元測定するために三次元デジタイザ2を配置する複数の第2の装置配置情報を生成する処理を行う(ステップS110)。
【0260】
図30は、三次元形状データ処理システム300Aによって行われる、ステップS110に記載された複数の第2の装置配置情報を生成する処理についての概要を例示するフローチャートである。
【0261】
先ず、三次元形状データ処理システム300Aは、判定用形状データを生成するためのマニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報を取得する(ステップS210)。この複数の第1の装置配置情報は、マニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20に基づいて、対象物1に対して、三次元デジタイザ2を所望の相対的な配置に配置決めできるように測定者が操作部4のマウスやキーボードを用いて入力することなどによって設定される。
【0262】
次に、三次元形状データ処理システム300Aは、複数の第1の装置配置情報(装置配置情報d4)に基づいて配置された三次元デジタイザ2を用いて対象物1を三次元測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の判定用形状データd1を生成する(ステップS220)。
【0263】
ここでの判定用形状データd1の生成は、最初に配置合わせされる判定用形状データd1の生成であるので、通常、装置配置情報d4に基づいて配置された三次元デジタイザ2が三次元測定して得た対象物1の形状データまたはCADシステム8が出力するCADデータd5に基づいて生成される。
【0264】
生成された複数の判定用形状データd1は、三次元形状処理装置100Aの形状データ取得部10Aに供給され、三次元形状処理装置100Aによって配置合わせ可否判定処理が行われる(ステップS230)。
【0265】
図31は、三次元形状処理装置100Aによって行われる、配置合わせ可否判定処理(ステップS230)についての概要を例示するフローチャートである。
【0266】
形状データ取得部10Aは、供給された複数の判定用形状データd1から1以上の判定用形状データd1を配置合わせの基準となる基準形状データd6として取得するとともに、これらの基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状を表す形状データを有する他の判定用形状データd1を原参照形状データd7として取得する(ステップS310)。
【0267】
形状データ取得部10Aに取得された原参照形状データd7は、ズレ歪み付与部11に供給されて、三次元形状についての形状配置のズレおよび三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが付与されることによって、1以上のズレ歪み含有参照形状データd8が生成される。また、形状配置のズレを付与するためにそれぞれ使用された形状配置ずらし変換M2は、配置合わせ可否判定部13Aへと供給される(ステップS320)。
【0268】
ズレ歪み付与部11によって生成された1以上のズレ歪み含有参照形状データd8は、形状配置調整部12へと供給されるとともに、形状データ取得部10Aからは1以上の基準形状データd6および原参照形状データd7が形状配置調整部12へ供給される。
【0269】
形状配置調整部12は、原参照形状データd7および1以上のズレ歪み含有参照形状データd8、または複数のズレ歪み含有参照形状データd8が、1の座標系において1以上の基準形状データd6になるべく重ね合わせられるように、原参照形状データd7と、1以上のズレ歪み含有参照形状データd8とが表す各三次元形状についての複数の形状配置を調整することによって、または、複数のズレ歪み含有参照形状データd8が表す各三次元形状についての複数の形状配置のそれぞれを調整することによって、複数の配置調整済み参照形状データd16を生成する。
【0270】
また、配置調整に使用された形状配置合わせ変換M3を配置合わせ可否判定部13Aへと供給し、基準形状データd6および複数の配置調整済み参照形状データd16を記憶部14へ供給する(ステップS330)。
【0271】
配置合わせ可否判定部13Aへ供給された形状配置ずらし変換M2と形状配置合わせ変換M3は、配置合わせ可否判定部13Aによって、複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係を表す評価値へと変換される(ステップS340)。
【0272】
配置合わせ可否判定部13Aは、この評価値と、制御処理部15から供給される判定用閾値th1とを比較する(ステップS350)。
【0273】
比較の結果、評価値が判定用閾値th1以下であれば、複数の配置調整済み参照形状データd16の配置合わせが成功した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データであると判定されて、この判定結果d21は制御処理部15へと供給され(ステップS360)、処理はステップS230(図30)へと戻される。
【0274】
比較の結果、評価値が判定用閾値th1よりも大きければ、複数の配置調整済み参照形状データd16の配置合わせが失敗した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データではないと判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS370)、処理はステップS230へと戻される。
【0275】
ステップS230へ戻された処理は、ステップS240へ移され、制御処理部15は、配置合わせ可否判定部13Aから供給された判定結果d21を確認し、原参照形状データd7が配置合わせ可能形状データであるか否かを調べる。
【0276】
次に、判定結果d21が、原参照形状データd7を配置合わせ可能形状データであると判定するものである場合には、制御処理部15は、配置合わせされた1以上の基準形状データd6、および原参照形状データd7からなる判定用形状データd1に対応する第1の装置配置情報(装置配置情報d4)を第2の装置配置情報として記憶部14に記憶し(ステップS260)、処理はステップS270へ移される。
【0277】
また、判定結果d21が、原参照形状データd7を配置合わせ可能形状データではないと判定するものである場合には、制御処理部15が、この原参照形状データd7に対応する第1の装置配置情報を所定量ずらした装置配置情報を、新たな第1の装置配置情報として生成し、この新たな第1の装置配置情報に対応する判定用形状データが生成されるように、マニピュレータ3aおよび3bの配置決め動作ならびに三次元デジタイザ2の三次元測定動作の制御、または、CADシステム8および抽出部7の動作の制御を行うことによって、新たな原参照形状データd7となるべき判定用形状データd1が生成され(ステップS250)、処理は再びステップS230へと移される。
【0278】
ステップS270では、適切に配置合わせされた各判定用形状データd1によって、形状検査の対象部位などの対象物1についての着目部分の三次元形状が漏れなく表されているか否かを、測定者が配置合わせされた各判定用形状データd1についての画像を表示部5で確認することなどにより、または、制御処理部15が、部品全体のCADデータと配置合わせされた各判定用形状データd1とを比較することなどにより、それぞれ確認する。
【0279】
各判定用形状データd1によって、対象物1についての着目部分の三次元形状が漏れなく表されておらず測定漏れがある場合には、他の第1の装置配置情報に対応する判定用形状データが生成されるように、制御処理部15がマニピュレータおよび三次元デジタイザ2、ならびにCADシステム8などを制御することによって、次回の配置合わせ可否判定処理において、通常、原参照形状データd7となるべき新たな判定用形状データが生成される。
【0280】
また、配置合わせ済みの判定用形状データd1の中から次回の配置合わせ可否判定処理において、1以上の基準形状データd6となるべき判定用形状データが生成され(ステップS280)、処理はステップS230へと移されて配置合わせ可否判定処理が繰り返される。
【0281】
また、各判定用形状データd1によって、対象物1についての着目部分の三次元形状が漏れなく表されている場合は、処理はステップS110(図29)へ戻される。なお、処理がステップS110へと戻されるときには、対象物1についての着目部分の三次元形状を漏れなく測定可能な三次元デジタイザ2についての装置配置情報(複数の第2の装置配置情報)が生成されている。
【0282】
ステップS110へ戻された処理は、ステップS120へと移され、三次元形状測定システム500Aは、ステップS110において生成された複数の第2の装置配置情報のそれぞれに基づいて三次元デジタイザ2を配置し、複数の個別形状データd2を測定する(ステップS130)。
【0283】
測定された複数の個別形状データd2は、三次元形状処理装置100Aの形状データ取得部10Aへと供給され、配置合わせの基準となる基準形状データd6または配置合わせされる原参照形状データd7として取得されて、形状配置調整部12へと供給され、形状配置調整部12において基準形状データd6と原参照形状データd7との配置合わせが行われて複数の配置合わせ済み個別形状データd17が生成されて記憶部14へと供給され、表示部5での表示などに用いられる。
【0284】
以上の処理によって、三次元形状測定システム500Aは、対象物1の全体的な三次元形状を表す形状データを生成する。
【0285】
<実施形態2について:>
[三次元形状測定システム500Bおよび三次元形状データ処理システム300B:]
図32は、実施形態1の変形例である実施形態2に係る三次元形状測定システム500Bおよび三次元形状データ処理システム300Bの構成例を示すブロック図である。
【0286】
図32に示される三次元形状処理装置100B、三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8は、三次元形状測定システム500Bおよび三次元形状データ処理システム300Bの主要部をなしており、三次元形状測定システム500Bとして機能する場合と、三次元形状データ処理システム300Bとして機能する場合とがある。
【0287】
三次元形状データ処理システム300Bは、マニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報に基づいて配置された三次元デジタイザ2が、マーカが貼付された対象物1bを測定範囲が重複するように複数の方向から測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の判定用形状データを生成するとともに、それらの判定用形状データが貼付されたマーカに基づいて適正に配置合わせ可能なものであるか否かを配置合わせ可否判定処理(後述)によって判定し、配置合わせ可能であると判定された各判定用形状データにそれぞれ対応する第1の装置配置情報を複数の第2の装置配置情報として生成する。
【0288】
三次元形状測定システム500Bは、あらかじめ三次元形状データ処理システム300Bとして機能することによって複数の第2の装置配置情報を生成した後、生成された複数の第2の装置配置情報に基づいて、マーカが貼付された対象物1bと三次元デジタイザ2とを相対的に配置し、対象物1bの三次元形状を複数の方向から測定して得られる複数の個別形状データにマーカに基づく配置合わせを適用して対象物1bの全体的な三次元形状を表す形状データを生成する。
【0289】
本実施形態においては、三次元形状測定システム500Bと三次元形状データ処理システム300Bとは、同一の構成要素により構成されているが、三次元形状測定システムおよび三次元形状データ処理システムは、例えば、それぞれ同一性能の三次元デジタイザならびにマニピュレータおよびその制御装置などを備えた別個の構成要素により構成されてもよいし、例えば、三次元形状データ処理システム300Bのマニピュレータおよびその制御装置については、三次元形状測定システム500Bのものよりも配置決め精度が高いものを採用してもよい。
【0290】
なお、同一形状の数多くの部品の形状検査などのために、三次元形状データ処理システム300Bは、三次元形状データ処理システム300Aと同様のティーチングを行う。
【0291】
三次元形状測定システム500Bおよび三次元形状データ処理システム300Bを構成する主要部のうち三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8については、三次元形状処理装置100Aに替えて三次元形状処理装置100Bに接続されていることを除いて、それぞれが対応する、三次元形状測定システム500Aを構成する主要各部と同一の構成および動作をするので説明を省略する。
【0292】
また、三次元デジタイザ2およびCADシステム8については、三次元デジタイザ2およびCADシステム8がそれぞれ行う三次元測定およびCADデータの保持の対象となる対象物はマーカが貼付された対象物1bであることが、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aにおける三次元デジタイザ2およびCADシステム8とは異なる。
【0293】
また、マーカが貼付された対象物1bについてのCADデータd5(図33)の生成については、例えば、大量生産における量産部品等の形状検査時に、各部品におけるマーカの貼付位置を予め指定する場合などに、マーカが貼付された状態の部品等の対象物1bのCADデータd5を生成することが可能である。
【0294】
[実施形態2に係る配置合わせ可否判定処理の原理の概要:]
次に、三次元形状処理装置100Bの説明に先立って、実施形態2に係る配置合わせ可否判定処理の原理の概要を、三次元形状測定システム500Bの動作の概要と合わせて説明する。
【0295】
○三次元形状測定システム500Bの動作の概要:
図34は、三次元形状測定システム500Bが、マーカが貼付された直方体状の対象物1bの三次元形状を複数の方向から測定するときの測定範囲の設定例を説明する図である。図34では、装置配置情報d4cおよびd4dに基づいて配置決めされた三次元デジタイザ2が異なる複数の方向から、f1からf5の5個のマーカが貼付された対象物1bの平面部位1sを三次元測定している。また、図34に示された異なる三次元デジタイザ2aおよび2bのように複数の三次元デジタイザを組合わせて三次元測定してもよい。
【0296】
ここで、測定範囲n3およびn4は、それぞれ装置配置情報d4cおよび装置配置情報d4dに対応する三次元デジタイザ2の測定範囲を示しており、測定範囲n3およびn4にそれぞれ対応する三次元形状を表す形状データd2cおよびd2dは、複数の個別形状データd2(図33)として、三次元形状処理装置100Bに供給される。測定範囲n3およびn4は対象物1b上で重複する部分を有しており、その重複部分には、マーカf1、f2およびf3が貼付されている。
【0297】
測定範囲n3およびn4にそれぞれ対応する個別形状データd2cおよびd2dは、三次元形状処理装置100Bによって、測定範囲n3およびn4の重複部分に貼付されたマーカに基づく配置合わせ方法を用いて配置合わせされる。このように、マーカに基づく配置合わせ方法を用いる場合には、配置合わせされる形状データを取得するための測定範囲の重複部分に、同一直線上にない3以上のマーカが存在するように、測定範囲を設定する必要がある。なお、本発明において、単に「3以上のマーカ」というときは、「同一直線上にない3以上のマーカ」を意味している。
【0298】
マーカとしては、白色等の三次元デジタイザ2が測定可能な色彩が施された円形シールや、白色等の円形シールの上に所定幅の黒色のリングが描かれたものなどが採用される。
【0299】
貼付されたマーカは、三次元測定時に測定される二次元画像および三次元形状データなどに基づいて、マーカ毎にマーカの位置を代表的に表すマーカ上の点の三次元座標が求められる。ここで、マーカの位置を代表的に表すマーカ上の点の三次元座標は、本発明において「三次元位置」と称する。
【0300】
マーカに基づく配置合わせにおいては、測定範囲の重複部分に存在する3以上のマーカについて、各マーカの中心など、各マーカの位置を代表的に表すマーカ上の点を「識別点」として採用し、識別点の三次元座標である三次元位置の対応関係に基づいて、各測定範囲に対応する形状データの配置合わせが行われる。
【0301】
マーカに基づく配置合わせ方法を採用することによって、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法を適用しても正しく配置合わせがなされないような、例えば平面同士などの配置合わせを適切に行うことができる。
【0302】
また、識別点としては、マーカの中心点などの他に、球状または半球状の部材を磁力や粘着力などによって対象物に取り付けて、三次元測定によって得られる該部材の形状データに該部材の既知の形状データをフィッティングするなどして求めた該部材の中心座標を採用してもよい。
【0303】
このように識別点を与える部材としては、平面状のものに限られず立体形状のものでもよく、また、該部材の対象物への取り付け方法は、粘着力、磁力その他の各種手法を採用し得る。
【0304】
図35は、図34に示される測定範囲n3およびn4にそれぞれ対応して取得された個別形状データd2cおよびd2dを説明する図である。
【0305】
個別形状データd2cにおける形状データd2cf1、d2cf2、d2cf3およびd2cf4は、それぞれ測定範囲n3にあるマーカf1、f2、f3およびf4の三次元形状を表し、個別形状データd2dにおける形状データd2df1、d2df2、d2df3およびd2df5は、それぞれ測定範囲n4にあるマーカf1、f2、f3およびf5の三次元形状を表している。
【0306】
個別形状データd2cおよびd2dは三次元形状処理装置100Bに供給されて配置合わせされるが、その際に、形状データ取得部10B(図33)によって、例えば、個別形状データd2cは基準形状データd6として、個別形状データd2dは原参照形状データd7としてそれぞれ取得される。
【0307】
取得された基準形状データd6および原参照形状データd7は、マーカ位置データ取得部16(図33)およびマーカ配置調整部19(図33)へと供給される。
【0308】
ここで、本出願においては、1以上のマーカの三次元位置によって構成されるデータを「マーカ位置データ」と称し、マーカ位置データが表す三次元形状、すなわち、マーカ位置データを構成するマーカの三次元位置が表す三次元形状を「マーカ位置形状」と称する。
【0309】
マーカ位置データ取得部16は、供給された基準形状データd6および原参照形状データd7のそれぞれについて、それぞれに含まれる全てのマーカの三次元位置b1からb4およびb5からb8を求める。
【0310】
次に、各形状データにおける各マーカの三次元位置b1からb4およびb5からb8の中から、複数のマーカについてのマーカ位置形状の、各形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置b1からb3およびb5からb7をそれぞれ探索する。
【0311】
次に、探索されたマーカの三次元位置b1からb3およびb5からb7を、それぞれ、基準形状データd6および原参照形状データd7についての測定範囲n3およびn4が重複する部分に貼付された3以上のマーカf1、f2およびf3から成るマーカ群についての三次元位置である基準マーカ位置データd11(図33、図35)および原参照マーカ位置データd12(図33、図35)として生成し、対応関係取得部17(図33)およびマーカ配置調整部19(図33)へと供給する。
【0312】
なお、本出願の図面では、マーカの三次元位置をその三次元座標によって定まる図面中の点として表す。
【0313】
対応関係取得部17は、取得された基準マーカ位置データd11および原参照マーカ位置データd12間の対応関係であるマーカデータ対応関係d13(図33)を生成し、マーカ配置調整部19へと供給する。
【0314】
図35の例においては、マーカデータ対応関係d13は、マーカデータ対応関係d13aとして与えられる。具体的には、マーカデータ対応関係d13aは、原参照形状データd7についての原参照マーカ位置データd12における各マーカの三次元位置b5、b6およびb7をそれぞれ基準形状データd6についての基準マーカ位置データd11における各マーカの三次元位置b1、b2およびb3に対応させる対応関係として与えられる。
【0315】
マーカ配置調整部19は、基準マーカ位置データd11における各マーカの三次元位置b1からb3のそれぞれと原参照マーカ位置データd12における各マーカの三次元位置b5からb7のそれぞれとが、マーカデータ対応関係d13(d13a)の対応関係に従って、できるだけ一致するような座標変換情報を求め、この座標変換情報によって基準形状データd6と原参照形状データd7との配置合わせを行う。
【0316】
本出願の図面では、マーカ位置データは、その表すマーカ位置形状によって表されており、図35においては、基準マーカ位置データd11および原参照マーカ位置データd12は、それぞれ基準マーカ位置形状c1および原参照マーカ位置形状c2によって表されている。
【0317】
なお、ここでの基準マーカ位置形状c1および原参照マーカ位置形状c2は、三次元デジタイザ2の測定誤差の影響は受けるものの、同じマーカf1、f2およびf3に対するマーカ位置形状であるので略合同となる。
【0318】
図36は、個別形状データd2cおよびd2dが、図35に示されるマーカデータ対応関係d13aに基づいて適切に配置合わせされた様子を説明する図である。
【0319】
図36では、マーカデータ対応関係d13aに基づいて、原参照形状データd7として取得された個別形状データd2dにおける各マーカf1、f2およびf3それぞれについての形状データd2df1、d2df2およびd2df3が、それぞれ、基準形状データd6として取得された個別形状データd2cにおける各マーカf1、f2およびf3についての形状データd2cf1、d2cf2およびd2cf3にできるだけ重なって一致するような座標変換が、マーカ配置調整部19によって求められる。
【0320】
すなわち、マーカf1、f2およびf3についての個別形状データd2dおよびd2cのそれぞれにおけるマーカの三次元位置b1からb3がマーカデータ対応関係d13aに基づいてそれぞれb5からb7にできるだけ一致するような座標変換が、マーカ配置調整部19によって求められ、この座標変換を用いて個別形状データd2dが個別形状データd2cへと配置合わせされている。
【0321】
以上に説明したように、重複した測定範囲n3およびn4のそれぞれについての個別形状データd2cおよびd2dは、測定範囲n3およびn4の重複部分における3以上のマーカf1からf3に基づいて三次元形状処理装置100Bにおいて配置合わせされる。
【0322】
○マーカに基づく配置合わせの誤りの類型:
次に、図37から図40は、マーカ位置形状に起因する配置合わせの誤りを説明する図である。
【0323】
図37では、図37における測定範囲n2に替えて測定範囲n5が設定されており、個別形状データd2eが測定範囲n5に対応している。測定範囲n1およびn5の重複部分には、マーカf1、f3およびf6が貼付されている。また、個別形状データd2aおよびd2eにおけるマーカf1、f3およびf6についてのマーカ位置データv4aおよびv4eは、それぞれマーカ位置形状c4を表わしている。
【0324】
図38(a)は、図37に示される測定範囲n1およびn2の重複部分に存在するマーカf2、f3およびf4についての、マーカ位置データv1aおよびv1bがそれぞれ表すマーカ位置形状c1の特徴を示している。ここで、図38には、説明を簡単にするために座標軸XYZが設けられている。なお、他の図面においても適宜座標軸が設けられている。
【0325】
また、図38(b)は、図37に示される測定範囲n1およびn5の重複部分に存在するマーカf1、f3およびf6についての、マーカ位置データv4aおよびv4eがそれぞれ表すマーカ位置形状c4の特徴を示している。
【0326】
図38(a)に示されるように、マーカf3と、マーカf2およびf4とのX軸方向の距離は、長さL1である。また、図38(b)に示されるように、マーカf3と、マーカf1およびf6とのX軸方向の距離は、長さL2である。ここで、L1はL2の数倍程度の長さである。
【0327】
図39(a)は、図37および図37に示される個別形状データd2aにおけるマーカf3の形状データd2af3近傍の形状データが表す三次元形状を示している。また、図39(b)は、図39(a)に示された三次元形状を、図39(a)における切断面線A−Aで切断した三次元形状を示している。
【0328】
図39(b)に示されるように、個別形状データd2aにおけるマーカf3の形状データd2af3が表す三次元形状は周辺部の形状よりも、+Y方向へ長さL3飛び出している。
【0329】
図39(c)は、図37および図37にそれぞれ示される個別形状データd2bおよびd2eのそれぞれにおけるマーカf3についての形状データd2bf3およびd2ef3近傍の形状データが表す三次元形状を示している。また、図39(d)は、図39(c)に示された三次元形状を、図39(c)における切断面線B−Bで切断した三次元形状を示している。
【0330】
図39(d)に示されるように、個別形状データd2bおよびd2eにおけるマーカf3の形状データd2bf3およびd2ef3がそれぞれ表す三次元形状は周辺部の形状と同一平面上にある。
【0331】
なお、図37における個別形状データd2aおよびd2bのそれぞれにおけるマーカf2およびf4についての形状データd2af2およびd2af4、ならびにd2bf2およびd2bf4がそれぞれ表す三次元形状もまた、それぞれ周辺部の形状と同一平面上にある。
【0332】
同様に、図37における個別形状データd2aおよびd2eのそれぞれにおけるマーカf1およびf6の形状データd2af1およびd2af6ならびにd2ef1およびd2ef6がそれぞれ表す三次元形状もまた、それぞれ周辺部の形状と同一平面上にある。
【0333】
図40(a)は、図37の個別形状データd2aおよびd2bが、マーカf2、f3およびf4に基づいて配置合わせされた三次元形状が図39の切断線A−Aで切断された形状を示している。
【0334】
また、図40(b)は、図37に示された個別形状データd2aおよびd2eが、マーカf1、f3およびf6に基づいて配置合わせされた三次元形状が図39の切断線A−Aで切断された形状を示している。
【0335】
図40(a)では、個別形状データd2aにおけるマーカf2、f3およびf4についての形状データd2af2、d2af3およびd2af4は、個別形状データd2bにおけるマーカf2、f3およびf4についての形状データd2bf2、d2bf3およびd2bf4とそれぞれ合わせられており、図39(b)に示された形状データd2af3が表す三次元形状と、その周辺の形状データが表す三次元形状とのY軸方向の差異である長さL3のために、個別形状データd2aおよびd2bがそれぞれ表す三次元形状には、角度θ1のズレが生じている。
【0336】
また、図40(b)では、個別形状データd2aにおけるマーカf1、f3およびf6についての形状データd2af1、d2af3およびd2af6は、個別形状データd2eにおけるマーカf1、f3およびf6についての形状データd2ef1、d2ef3およびd22f6とそれぞれ合わせられており、図39(b)に示された形状データd2af3が表す三次元形状と、その周辺の形状データが表す三次元形状とのY軸方向の差異である長さL3のために、個別形状データd2aおよびd2eがそれぞれ表す三次元形状には、角度θ2のズレが生じている。
【0337】
ここで、角度θ2は、角度θ1の数倍程度大きくなっている。これは、図38(a)および図38(b)にそれぞれ示された長さL1およびL2の差に起因して生じている。
【0338】
このように、マーカの三次元位置の検出誤差が同程度であっても、配置合わせに使用される3以上のマーカについてのマーカ位置形状の差異によっては、配置合わせ後の各形状データについてのズレは、大きく異なってくる。
【0339】
ICP法などを用いる配置合わせにおいては、1以上の基準形状データと原参照形状データにおける測定範囲の重複部分に対応するそれぞれの形状が許容限度を超えて異なっている場合には、配置合わせのズレが生ずるおそれがある。
【0340】
同様に、マーカに基づいた配置合わせにおいても、1以上の基準形状データと原参照形状データにおける測定範囲の重複部分にそれぞれ存在するマーカ位置形状が、許容限度を超えて異なっている場合には、上述の例のように、正しいマーカデータ対応関係間が取得されていたとしても、配置合わせのズレが行生ずるおそれがあり、マーカに基づく配置合わせにおいては、この誤差は、配置合わせに用いられるマーカ間の位置関係によって、さらに増幅される場合がある。
【0341】
ここで、これらの配置合わせの誤りを、本出願においてはマーカ位置形状に起因した配置合わせの誤りであると表現する。
【0342】
なお、形状データ間の配置合わせにおいては、マーカ位置形状に起因した配置合わせの誤りも、形状検査の規格などのシステムの要求によっては許容されない。したがって、これらの誤りを正しく判定することが求められる。
【0343】
○実施形態2における配置合わせ可否判定処理の原理の概要:
次に、マーカに基づく配置合わせによって、形状データ間の配置合わせを行う場合の配置合わせ可否判定処理の原理の概要を、ICP法に基づく配置合わせとの差異と合わせて説明する。
【0344】
ICP法を用いる配置合わせにおいては、既述したように、基準形状データと原参照形状データとを近づける座標変換を求める演算毎に、各形状データにおける略同一形状部分間の対応関係を動的に求め、この対応関係に基づいて求められる座標変換を各形状データ間に施すことを繰り返し行うため、基準形状データと原参照形状データとの当初の配置関係が異なると、各形状データについての略同一形状部分間の対応関係も変動する。
【0345】
従って、特に、各形状データの表す三次元形状の凹凸の少ない場合には、最終的な配置合わせ結果も各データ間の当初の配置関係によって異なる場合がある。
【0346】
このため、ICP法に基づく配置合わせにおける配置合わせ可否判定処理においては、三次元形状の位置および姿勢を示す形状配置のズレ、および三次元形状の歪みの少なくとも一方であるズレ歪みを、原参照形状データd7(図3)が表す三次元形状に対して付与することなどによってズレ歪み含有参照形状データd8(図3)を生成し、生成されたズレ歪み含有参照形状データd8などに対して基準形状データd6への配置合わせを試みる。
【0347】
次に、この配置合わせによって生成された複数の配置調整済み参照形状データd16(図3)についての形状配置の相互関係に基づいて複数の配置調整済み参照形状データd16と基準形状データd6との配置合わせが成功したか否かを判定し、配置合わせが成功した複数の配置調整済み参照形状データd16についての原参照形状データd7を配置合わせが可能であると判定する。
【0348】
これに対して、マーカに基づく配置合わせにおいては、既述したように、先ず、基準形状データd6(図33)と参照形状データd7(図33)における各マーカの三次元位置の中から、複数のマーカについてのマーカ位置形状の、各形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置をそれぞれ探索する。
【0349】
次に、探索されたそれぞれの3以上のマーカの三次元位置を基準形状データd6および原参照形状データd7のそれぞれについての測定範囲が重複する部分に貼付された3以上のマーカから成るマーカ群についての三次元位置である基準マーカ位置データd11(図33)および原参照マーカ位置データd12(図33)として生成するとともに、基準マーカ位置データd11における各マーカの三次元位置を、それぞれ原参照マーカ位置データd12における各マーカの三次元位置に対応させるマーカデータ対応関係d13(図33)を生成する。
【0350】
次に、このマーカデータ対応関係d13に基づいて、基準形状データd6および原参照形状データd7のそれぞれについて各マーカの三次元位置ができるだけ一致する座標変換を求め、この座標変換を適用することによって基準形状データと原参照形状データとの配置合わせを行う。
【0351】
従って、マーカデータ対応関係d13は、基準形状データd6と原参照形状データd7との当初の配置関係の影響をほとんど受けることなく生成され、基準形状データd6と原参照形状データd7との配置合わせも、基準形状データd6と原参照形状データd7との当初の配置関係の影響を受けることなく行われる。
【0352】
このため、マーカに基づく配置合わせにおける配置合わせ可否判定処理においては、原参照形状データd7から生成された原参照マーカ位置データd12が表すマーカ位置形状に対して、三次元形状の歪みを付与することによって歪み含有参照マーカ位置データd14(図33)が生成され、生成された歪み含有参照マーカ位置データd14などに対して基準形状データd6から生成される基準マーカ位置データd11への配置合わせが試みられる。
【0353】
この配置合わせによって生成される複数の配置調整済みマーカ位置データの相互関係に基づいて複数の配置調整済みマーカ位置データと基準マーカ位置データd11との配置合わせが成功したか否かが判定され、配置合わせが成功した複数の配置調整済みマーカ位置データについての原参照形状データd7が、配置合わせが可能であると判定される。
【0354】
上述したように原参照マーカ位置データd12に与える形状配置のズレは、配置調整済みマーカ位置データの原参照形状データd7に対する配置には影響を与えないので、本発明においては、原参照マーカ位置データd12に対して歪みのみを付与してもよいし、歪みと共に形状配置のズレを付与してもよい。
【0355】
なお、基準マーカ位置データd11と複数の配置調整済みマーカ位置データのそれぞれとの相互関係ではなく、複数の配置調整済みマーカ位置データについての相互関係が採用される理由については、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせにおける配置合わせ可否判定処理において、基準形状データd6と複数の配置調整済み参照形状データd16のそれぞれとの相互関係ではなく、複数の配置調整済み参照形状データd16についての相互関係が用いられる理由と同様の理由によるものである。
【0356】
つまり、基準マーカ位置データd11と複数の配置調整済みマーカ位置データとが表現するマーカ位置形状が完全に合同でない限り、基準マーカ位置データd11と複数の配置調整済みマーカ位置データのそれぞれとの相互関係によっては、複数の配置調整済みマーカ位置データと基準マーカ位置データd11との配置合わせが成功したか否かを判定できないからである。
【0357】
なお、マーカに基づく配置合わせの配置合わせ可否判定処理における判定方法の詳細については、三次元形状処理装置100Bの説明において後述する。
【0358】
[三次元形状処理装置100B:]
図33は、変形例に係る三次元形状データ処理装置100Bの各機能部の構成を例示するブロック図である。図33には、各機能部とともに、各機能部間で授受される主な情報が記載されている。また、制御信号などについての記載は省略されている。
【0359】
図33に示されるように、三次元形状処理装置100Bは、操作部4、表示部5、入出力部6、抽出部7、形状データ取得部10B、マーカ位置データ取得部16、対応関係取得部17、マーカ歪み付与部18、マーカ配置調整部19、配置合わせ可否判定部13B、記憶部14および制御処理部15を主に備えて構成される。
【0360】
三次元形状処理装置100Bは、三次元形状データ処理システム300Bの構成要素として機能する際には、供給される複数の判定用形状データd1が適正に配置合わせ可能なものであるか否かを判定する配置合わせ可否判定処理を行って、配置合わせ可能であると判定された判定用形状データd1に対応する装置配置情報を、三次元形状測定システム500Bが複数の個別形状データを測定するときの装置配置情報である第2の装置配置情報として求める処理などを行う。
【0361】
また、三次元形状処理装置100Bが、三次元形状測定システム500Bの構成要素として機能する際には、三次元デジタイザ2から供給される複数の個別形状データd2を、マーカに基づく配置合わせ方法を用いて配置合わせし、対象物1bについての全体的な三次元形状を表す形状データを生成する処理などを行う。
【0362】
図33に示される操作部4、表示部5、入出力部6、抽出部7、記憶部14および制御処理部15については、図3において同一の符号を付された機能要素と同一であるので説明を省略する。
【0363】
なお、抽出部7、形状データ取得部10B、マーカ位置データ取得部16、対応関係取得部17、マーカ歪み付与部18、マーカ配置調整部19、配置合わせ可否判定部13Bおよび制御処理部15は、CPUで所定の制御プログラムを実行することで実現しても良いし、専用のハードウェア回路を用いて実現しても良い。
【0364】
◎形状データ取得部10B:
○三次元形状データ処理システム300B機能時の形状データ取得部10B:
三次元形状データ処理システム300Bが機能しているときは、形状データ取得部10Bには、三次元デジタイザ2、抽出部7、および制御処理部15から、それぞれ三次元測定された対象物1bの形状データ、CADシステム8から供給される対象物1bについてのCADデータd5、および記憶部14に記憶されている原参照形状データd7に対応した配置調整済み参照形状データd16および基準形状データd6に基づいた複数の判定用形状データd1であって、1以上の判定用形状データと、それらの表す三次元形状の一部または全部と略同一の三次元形状であるとともに、対象物1bに貼付された複数のマーカのうち3以上のマーカ群の三次元形状が含まれる三次元形状を表す形状データをそれぞれ有する1以上の他の判定用形状データとを含んだ複数の判定用形状データd1が適宜供給される。
【0365】
形状データ取得部10Bは、供給された複数の判定用形状データd1から1以上の基準形状データd6と原参照形状データd7を取得して、それらをマーカ位置データ取得部16およびマーカ配置調整部19へ供給する。
【0366】
複数の判定用形状データの配置合わせ時に測定漏れ部分を確認するという観点からは、判定用形状データは、三次元デジタイザ2によって測定されるべき形状データとできるだけ同一の形状を有することが望ましい。
【0367】
しかしながら、マーカに基づく配置合わせにおいては、基準形状データd6および原参照形状データd7にそれぞれ含まれる、対象物1b上の3以上のマーカからなる同一のマーカ群についての形状データに基づいて配置合わせがされるので、三次元デジタイザ2によって測定されるべき形状データと、その形状データに対応する判定用形状データとが、同じマーカについての形状データを含んでいる限り、これらの形状データがそれぞれ表す三次元形状が相互に多少異なっていたとしても本発明の有用性を損なうことはない。
【0368】
図41および図42は、マーカが貼付された対象物1bについての基準形状データおよび原参照形状データの生成例を説明する図である。
【0369】
図41は、三次元デジタイザ2が判定用形状データd1cおよびd1d(図42)を生成するための三次元測定を行う様子を示している。対象物1b上に3個のマーカf1、f2およびf3が貼付されており、これらのマーカは、異なる装置配置情報に基づいて配置された三次元デジタイザ2についての2つの測定範囲n3およびn4が重複している部分に貼付されている。
【0370】
図42は、図41に示される測定範囲n3およびn4にそれぞれ対応して取得された判定用形状データd1cおよびd1dが、それぞれ基準形状データd6bおよび原参照形状データd7bとして取得される様子を示している。
【0371】
ここでは、判定用形状データd1cには、マーカf1、f2およびf3の三次元形状を表す形状データd1cf1、d1cf2およびd1cf3が含まれており、判定用形状データd1dには、マーカf1、f2およびf3の三次元形状を表す形状データd1df1、d1df2およびd1df3が含まれている。
【0372】
三次元デジタイザ2から形状データ取得部10Bに供給された判定用形状データd1cおよびd1dは、形状データ取得部10Bによってそれぞれ基準形状データd6bおよび原参照形状データd7bとして取得されている。また、これらの基準形状データd6bおよび原参照形状データd7bは、マーカ位置データ取得部16およびマーカ配置調整部19へと供給される。
【0373】
なお、図41および図42では、2つの判定用形状データから基準形状データおよび原参照形状データが1つずつ生成されているが、実施形態2に係る基準形状データおよび原参照形状データも、図14および図15を用いて説明した実施形態1に係る基準形状データおよび原参照形状データと同様の種々の態様を取り得る。ただし、既述したように、1以上の基準形状データと原参照形状データとの略同一の形状部分には、3以上のマーカからなる同一のマーカ群についての形状データが含まれている必要がある。
【0374】
なお、3以上のマーカについての形状データが、既に適切に配置合わせされている複数の基準形状データd6に渡って存在しているとともに、これから配置合わせされるべき原参照形状データd7にも存在していてもよい。
【0375】
また、実施形態2における基準形状データd6および原参照形状データd7となるべき複数の判定用形状データd1の供給方法などについても、実施形態1と同様である。
【0376】
以上に説明したように、図33に示される形状データ取得部10Bは、複数のマーカが貼付された対象物1bについての複数の三次元形状をそれぞれ表す複数の判定用形状データd1のうち、1以上の判定用形状データd1を基準形状データd6として取得するとともに、それら1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状であって、対象物1bに貼付された複数のマーカのうち3以上のマーカから成るマーカ群の三次元形状が含まれる三次元形状を表す形状データを含んでいる他の判定用形状データを原参照形状データd7として取得する。
【0377】
○三次元形状測定システム500B機能時の形状データ取得部10B:
三次元形状測定システム500Bが機能するときの形状データ取得部10Bは、判定用形状データd1に替えて個別形状データd2を供給されることを除き、三次元形状データ処理システム300B機能時の形状データ取得部10Bと同じ動作をする。
【0378】
◎マーカ位置データ取得部16:
○三次元形状データ処理システム300B機能時のマーカ位置データ取得部16:
図33に示されるマーカ位置データ取得部16は、三次元形状データ処理システム300Bが機能するときは、供給された1以上の基準形状データd6および原参照形状データd7のそれぞれについて、略同一の形状部分に存在する3以上のマーカについての形状データなどを抽出して、それらのマーカの三次元位置をそれぞれ示す1以上の基準マーカ位置データd11および原参照マーカ位置データd12を生成して、対応関係取得部17およびマーカ配置調整部19へと供給するとともに、原参照マーカ位置データd12については、マーカ歪み付与部18へも供給する。
【0379】
図43は、マーカ位置データ取得部16および対応関係取得部17の動作例を説明する図である。
【0380】
図43に示される基準形状データd6bおよび原参照形状データd7bは、それぞれ、図42に示される基準形状データd6bおよび原参照形状データd7bである。
【0381】
マーカ位置データ取得部16は、基準形状データd6bおよび原参照形状データd7bなどを処理することによって、図41に示されるマーカf1、f2およびf3にそれぞれ対応する三次元位置を、基準形状データd6bについては、b1、b2およびb3として、また、原参照形状データd7bについては、b4、b5およびb6として求める。
【0382】
求められたマーカの三次元位置b1、b2およびb3は、基準マーカ位置データv5を構成し、マーカの三次元位置b4、b5およびb6は、原参照マーカ位置データv6を構成する。なお、基準マーカ位置データv5および原参照マーカ位置データv6は、それぞれ図33における基準マーカ位置データd11および原参照マーカ位置データd12に相当する。
【0383】
具体的には、先ず、三次元測定時に得られた二次元画像からエッジ抽出処理などの画像処理によって、各マーカf1、f2およびf3、ならびに図41における測定範囲n3およびn4の重複部分と異なる測定範囲に含まれる不図示の他のマーカの画像を抽出し、この画像から各マーカの中心に対応する画素位置をそれぞれ求める。
【0384】
次に、求められた各画素位置に対応する三次元座標を基準形状データd6および原参照形状データd7などの形状データから求めることなどによって各マーカf1、f2およびf3ならびに不図示の他のマーカを含む全てのマーカについての三次元位置を、基準形状データd6bおよび原参照形状データd7bに対して求める。
【0385】
次に、基準形状データd6bおよび原参照形状データd7bにおける求められた全てのマーカの三次元位置の中から、複数のマーカについてのマーカ位置形状の、基準形状データd6bおよび原参照形状データd7b間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置を探索する。
【0386】
なお、三次元デジタイザ2が取得した形状データにおいては、取得された形状データに対する三次元デジタイザ2の存在方向が判別可能であるため、通常、この探索では三次元デジタイザ2側のみから観察されるマーカ位置形状間に基づいた合同関係の探索が行われる。このため、表裏の誤認識に起因する誤った探索が防止される。
【0387】
図43の例では、基準形状データd6bにおけるマーカの三次元位置b1、b2およびb3により定められるマーカ位置形状c5と、原参照形状データd7bにおけるマーカの三次元位置b4、b5およびb6により定められるマーカ位置形状c6とが略合同である。
【0388】
したがって、基準形状データd6bおよび原参照形状データd7bのそれぞれについてマーカの三次元位置b1、b2およびb3、ならびにb4、b5およびb6が探索される。
【0389】
次に、探索されたマーカの三次元位置b1、b2およびb3、ならびにb4、b5およびb6を、基準形状データd6bおよび原参照形状データd7bのそれぞれについての測定範囲n3およびn4が重複する部分に貼付された3以上のマーカf1、f2およびf3から成るマーカ群についての三次元位置である基準マーカ位置データv5および原参照マーカ位置データv6として生成する。
【0390】
また、マーカの三次元位置の生成について、CADデータなどにおいては、通常、各マーカ部分は予め、独立した各部位として登録されているため、二次元画像を用いることなくマーカの三次元位置を求めることができる。
【0391】
生成された、基準マーカ位置データv5および原参照マーカ位置データv6は、それぞれ図33における基準マーカ位置データd11および原参照マーカ位置データd12として対応関係取得部17およびマーカ配置調整部19へ供給される。
【0392】
以上に説明したように、マーカ位置データ取得部16は、1以上の基準形状データd6および原参照形状データd7について、これらの形状データについての測定範囲の対象物1b上での重複部分に存在するマーカ群の各三次元位置をそれぞれ示す1以上の基準マーカ位置データd11および原参照マーカ位置データd12を求める。
【0393】
○三次元形状測定システム500B機能時のマーカ位置データ取得部16:
三次元形状測定システム500Bが機能しているときのマーカ位置データ取得部16は、三次元形状データ処理システム300B機能時と同じ動作によって生成した基準マーカ位置データd11および原参照マーカ位置データd12を対応関係取得部17へ供給する。
【0394】
◎対応関係取得部17:
図33に示される対応関係取得部17は、三次元形状データ処理システム300Bの機能時および三次元形状測定システム500Bの機能時に、同じ動作を行う。対応関係取得部17は、マーカ位置データ取得部16から供給された1以上の基準マーカ位置データd11および原参照マーカ位置データd12間の対応関係であるマーカデータ対応関係d13を生成し、マーカ配置調整部19へと供給する。
【0395】
図43の例においては、マーカデータ対応関係d13bがマーカデータ対応関係d13に相当する。マーカデータ対応関係d13bは、具体的には、原参照形状データd7bについての原参照マーカ位置データv6における各マーカの三次元位置b4、b5およびb6をそれぞれ基準形状データd6bについての基準マーカ位置データv5における各マーカの三次元位置b1、b2およびb3に対応させる対応関係として与えられる。
【0396】
なお、マーカデータ対応関係d13bは、例えば、合同なマーカ位置形状c5とマーカ位置形状c6の各頂点の対応関係などから求めることができる。
【0397】
したがって、図33においては、マーカ位置データ取得部16と対応関係取得部17とは、異なる機能部であるが、同一の機能部によってマーカ位置データ取得部16および対応関係取得部17を実現してもよい。
【0398】
◎マーカ歪み付与部18:
図33に示されるマーカ歪み付与部18は、三次元形状データ処理システム300Aが機能しているときに作動する機能部であり、実施形態1に係るズレ歪み付与部11に対応する機能部である。
【0399】
マーカ歪み付与部18は、マーカ位置データ取得部16から原参照マーカ位置データd12を、制御処理部15から三次元デジタイザ2の測定精度d18を供給されて、マーカ位置データ取得部16が表す三次元形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成し、マーカ配置調整部19へ供給する。
【0400】
なお、実施形態2に係る配置合わせ可否判定処理の原理の概要の説明において、説明したようにマーカ歪み付与部18は、実施形態1に係る形状配置調整部12とは異なり、原参照マーカ位置形状に形状の歪みを必ず付与する。つまり、形状配置のズレは、配置合わせ可否判定処理の判定結果に影響を及ぼさないので付与しても付与しなくてもよいが、少なくとも形状の歪みは必ず付与する。
【0401】
図44は、歪み含有参照マーカ位置データv7およびv8の生成例を説明する図である。なお、図44においては、マーカ位置形状の歪み量を、マーカ位置形状の大きさに対して誇張して表示している。
【0402】
図44において、マーカの三次元位置b4、b5およびb6によって定められる原参照マーカ位置形状c6を表す原参照マーカ位置データv6は、マーカ位置データ取得部16からマーカ歪み付与部18に供給されている。
【0403】
マーカ歪み付与部18は、マーカの三次元位置b4に形状歪み変換M1dを付与してマーカの三次元位置b7を生成することによって、マーカの三次元位置b5、b6およびb7によって定められる歪み含有参照マーカ位置形状c7を表す歪み含有参照マーカ位置データv7を生成するともに、マーカの三次元位置b6に形状歪み変換M1eを付与してマーカの三次元位置b8を生成することによってマーカの三次元位置b4、b5およびb8によって定められる歪み含有参照マーカ位置形状c8を表す歪み含有参照マーカ位置データv8を生成している。
【0404】
ここで、歪み含有参照マーカ位置データv7およびv8がそれぞれ表す歪み含有参照マーカ位置形状c7およびc8は、原参照マーカ位置データv6が表す原参照マーカ位置形状c6に歪みが付与されたマーカ位置形状である。
【0405】
形状歪み変換M1dおよびM1eは、実施形態1に係るズレ歪み付与部11が、原参照形状データd7に対して付与する形状歪み変換と同種の変換である。
【0406】
図44の例では、原参照マーカ位置データv6を構成する3つのマーカの三次元位置のうち1つの三次元位置のみに形状歪み変換が付与されて歪み含有参照マーカ位置データが生成されているが、例えば、原参照マーカ位置データv6を構成する3つのマーカの三次元位置をそれぞれ異なる方向に移動させるなど、原参照マーカ位置形状c6に対して少なくとも形状の歪みを発生させる変換であればどのような変換であってもよい。
【0407】
また、与えられる形状歪み変換は、実施形態1に係るズレ歪み付与部11が付与する形状歪み変換と同じく、三次元デジタイザ2の測定精度d18に基づいて設定されても良いし、測定精度d18に基づくことなく適切な歪み変換を設定しても良い。
【0408】
また、ズレ歪み付与部11と同様に、マーカ歪み付与部18は、または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を生成する。なお、1つだけの歪み含有参照マーカ位置形状を生成する場合には、マーカ配置調整部19における配置調整において、必ず原参照マーカ位置データd12も配置調整の対象とされることによって、複数の配置調整済みマーカ位置データが生成される。
【0409】
以上に説明したように、マーカ歪み付与部18は、原参照マーカ位置データd12を構成する各三次元位置の少なくとも1つが変更されることによって、原参照マーカ位置データd12が表す三次元形状である原参照マーカ位置形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成する。
【0410】
◎マーカ配置調整部19:
図33に示されるマーカ配置調整部19は、実施形態1に係る形状配置調整部12に対応する機能部である。
【0411】
○三次元形状データ処理システム300B機能時のマーカ配置調整部19:
三次元形状データ処理システム300B機能時のマーカ配置調整部19は、形状データ取得部10Bから1以上の基準形状データd6および原参照形状データd7を、マーカ位置データ取得部16から1以上の基準マーカ位置データd11および原参照マーカ位置データd12を、対応関係取得部17からマーカデータ対応関係d13を、マーカ歪み付与部18から1または複数の歪み含有参照マーカ位置データd14を、制御処理部15から三次元デジタイザ2についての装置配置情報d4を、それぞれ供給される。
【0412】
これらの各種データの供給を受けたマーカ配置調整部19は、原参照マーカ位置データd12および、1または複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データd11についてのマーカの三次元位置とが、マーカデータ対応関係d13に従って1の座標系においてそれぞれなるべく一致するように、原参照マーカ位置データd12が表す原参照マーカ位置形状と、1または複数の歪み含有参照マーカ位置データd14がそれぞれ表す1または複数の歪み含有参照マーカ位置形状とのそれぞれについての位置および姿勢を示す複数の形状配置を調整することによって複数の配置調整済みマーカ位置データを生成する動作を行う。
【0413】
マーカ配置調整部19は、また、複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データd11についての各マーカの三次元位置とが、マーカデータ対応関係d13に従って1の座標系においてそれぞれなるべく一致するように、複数の歪み含有参照マーカ位置データd14がそれぞれ表す複数の歪み含有参照マーカ位置形状についての複数の形状配置を調整することによって、複数の配置調整済みマーカ位置データを生成する動作を行う。
【0414】
マーカ配置調整部19は、上述した複数の配置調整済みマーカ位置データの生成の際に用いられた複数の形状配置合わせ変換M3を配置合わせ可否判定部13Bへと供給するとともに、複数の形状配置合わせ変換M3をそれぞれ、装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に適用することによって得られる複数の配置調整済み参照形状データd16と、基準形状データd6とを目視による配置合わせの確認などに供するために記憶部14へと供給する。
【0415】
図45および図46を用いて、以下に、マーカ配置調整部19の動作を説明する。なお、図45および図46においては、マーカ位置形状の歪み量およびマーカ位置形状間の配置ずれ量を、マーカ位置形状の大きさに対して誇張して表示している。
【0416】
図45は、マーカ配置調整部19が、配置合わせが成功した配置調整済みマーカ位置データを生成する過程を説明する図であり、図46は、マーカ配置調整部19が、配置合わせが失敗した配置調整済みマーカ位置データを生成する過程を説明する図である。
【0417】
図45には、基準マーカ位置形状c5および原参照マーカ位置形状c6をそれぞれ表す基準マーカ位置データv5および原参照マーカ位置データv6が、それぞれに対応する三次元デジタイザ2の装置配置情報d4に基づいて、マーカ配置調整部19によって1の座標系に変換されている。
【0418】
ここでの基準マーカ位置データv5と原参照マーカ位置データv6とのズレは、マニピュレータ3aの配置決め誤差などに起因するものである。
【0419】
また、歪み含有参照マーカ位置形状c7およびc8によってそれぞれ表されている歪み含有参照マーカ位置データv7およびv8は、マーカ歪み付与部18において原参照マーカ位置データv6から生成されたものである。
【0420】
原参照マーカ位置データv6と、歪み含有参照マーカ位置データv7およびv8とのずれは、マーカ歪み付与部18において原参照マーカ位置データv6に与えられた形状歪み変換に起因するものである。
【0421】
また、原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8についての各マーカの三次元位置が、マーカデータ対応関係d13に基づいて、1の座標系において原参照マーカ位置データv6についての各マーカの三次元位置にそれぞれなるべく一致するように、原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8に対してそれぞれ形状配置合わせ変換M3d、M3eおよびM3fを施すことによって、配置の調整が試みられる。
【0422】
この結果、それぞれ配置調整済みマーカ位置形状c6’、c7’およびc8’を表す配置調整済みマーカ位置データv6’、v7’およびv8’が生成されて、基準マーカ位置データv5に対して適切に配置合わせが成されている。
【0423】
ここでそれぞれの形状配置合わせ変換M3d、M3eおよびM3fは、配置合わせされる原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8の各頂点すなわち各マーカの三次元位置を、マーカデータ対応関係d13に従って基準マーカ位置データv5についての各マーカの三次元位置にアフィン変換によってそれぞれ対応させる連立方程式を作成し、最小二乗法を用いて、(1)式または(2)式で表されるアフィン変換の変換行列を求めることなどによって生成される。従って、配置調整済み参照形状データd16を生成する前に、これらのアフィン変換は生成される。
【0424】
図46では、図45の例と全く同様にして配置合わせがされたが、歪み含有参照マーカ位置データv8の配置合わせが、失敗した例を示している。このような配置合わせの失敗は、例えば、原参照マーカ位置データv6についてのマーカ位置形状が、歪み付与の影響を受けやすい形状をしている場合などに、三次元空間的に発生する。
【0425】
形状配置合わせ変換M3d、M3eおよびM3fは、配置合わせの結果に関わらず、それぞれ形状配置合わせ変換M3(図33)として配置合わせ可否判定部13Bへと供給されて、配置合わせ可否判定処理に供せられる。
【0426】
また、基準形状データd6と原参照形状データd7とにそれぞれ対応する装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に対して、形状配置合わせ変換M3d、M3eおよびM3fを適用することによって得られる複数の配置調整済み参照形状データd16と、基準形状データd6とが、表示画像の目視による配置合わせの確認などのために記憶部14へと供給される。
【0427】
なお、実施形態2においては、基準マーカ位置データd11と原参照マーカ位置データd12との対応関係として求められた1つのマーカデータ対応関係d13を原参照マーカ位置データv6および各歪み含有参照マーカ位置データv7の全てに適用して複数の配置調整済みマーカ位置データをそれぞれ生成する配置合わせが行われているが、別法も採用し得る。
【0428】
この別法としては、例えば、各歪み含有参照マーカ位置データv7が生成された後に、基準形状データd6に含まれる全てのマーカを対象として各歪み含有参照マーカ位置データv7のそれぞれと最も合同関係に近いマーカ位置形状を表す各マーカ位置データを新たに探索するとともに、歪み含有参照マーカ位置データと新たに探索されたマーカ位置データとの組合わせ毎にマーカデータ対応関係をそれぞれ取得し、これらのマーカデータ対応関係に基づいて各歪み含有参照マーカ位置データv7を、対応するマーカ位置形状へ配置合わせすることによって複数の配置調整済みマーカ位置データを生成する手法を採用し得る。
【0429】
この別法によれば、測定誤差などに起因したマーカ位置形状の歪みによって発生する誤った配置合わせを、1つのマーカデータ対応関係d13に基づいて配置合わせを試みる場合よりも、広範な範囲にわたって模擬することができる。
【0430】
尚、該別法における新たなマーカ位置データの探索については、基準形状データd6だけでなく過去に配置合わせ可能であると判定された原参照形状データd7をも対象として行ってもよい。
【0431】
○三次元形状測定システム500B機能時のマーカ配置調整部19:
三次元形状測定システム500B機能時のマーカ配置調整部19は、形状データ取得部10Bから複数の個別形状データに基づいた1以上の基準形状データd6および原参照形状データd7を、マーカ位置データ取得部16から1以上の基準マーカ位置データd11および原参照マーカ位置データd12を、対応関係取得部17からマーカデータ対応関係d13を、制御処理部15から三次元デジタイザ2についての装置配置情報d4を、それぞれ供給される。
【0432】
マーカ配置調整部19は、三次元形状データ処理システム300Bの機能時と同様に、マーカ位置データ取得部16で求められるマーカデータ対応関係d13に従って、原参照マーカ位置データd12についての各マーカの三次元位置を基準マーカ位置データd11についての各マーカの三次元位置にそれぞれ、できるだけ一致させる形状配置合わせ変換を求める。
【0433】
次に、マーカ配置調整部19は、求められた形状配置合わせ変換を、基準形状データd6と原参照形状データd7とにそれぞれ対応する装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に対して適用することによって、基準形状データd6と原参照形状データd7との配置合わせを行う。
【0434】
配置合わせされた基準形状データd6と原参照形状データd7とは、配置合わせ済み個別形状データd17として記憶部14へ供給される。
【0435】
◎配置合わせ可否判定部13B:
図33に示される配置合わせ可否判定部13Bは、三次元形状データ処理システム300Bが機能しているときに作動する機能部である。配置合わせ可否判定部13Bは、マーカ配置調整部19から形状配置合わせ変換M3を表す変換行列を供給されて、これらの変換行列に基づいて、マーカ配置調整部19において生成された複数の配置調整済みマーカ位置データについての形状配置の相互関係を表す評価値を求める。
【0436】
配置合わせ可否判定部13Bは、この評価値を判定用閾値th1と比較することにより、原参照形状データd7が、形状データ取得部10Bからマーカ配置調整部19へと供給された1以上の基準形状データd6に配置合わせされることによって、基準形状データd6とともに対象物についての1の全体的な三次元形状を表すように形状配置を調整することができる配置合わせ可能形状データであるか否かを判定する配置合わせ可否判定処理を行う。
【0437】
なお、判定用閾値th1は、記憶部14に記憶されており、制御処理部15から配置合わせ可否判定部13Bへ供給される。
【0438】
また、原参照形状データd7が、配置合わせ可能形状データであるか否か、すなわち原参照形状データd7の配置合わせが適切にできるか否かを判定した判定結果d21は、制御処理部15へと供給されて、表示部5に表示される。
【0439】
判定結果d21が表示部5に表示されることによって、測定者は、表示部5に表示された配置調整済み参照形状データd16および基準形状データd6の表示状態を種々に変更しつつ目視による配置合わせの確認をする必要が無くなり、客観的な数値によって配置合わせの可否(成否)を判断できるので、目視による判定の誤りを防止することができるとともに、作業効率を向上させることができる。
【0440】
次に、図45および図46に示された形状配置合わせ変換を用いて、複数の配置調整済みマーカ位置データについての形状配置の相互関係を表す評価値を求める手法の例を説明する。
【0441】
図45に示される形状配置合わせ変換M3d、M3e、およびM3fは、それぞれ、配置調整済みマーカ位置データv6’、v7’、およびv8’が、原参照マーカ位置データv6から生成される過程における、各配置調整済みマーカ位置データについての「形状配置の変動情報」を表わしている。
【0442】
ここで、原参照マーカ位置データv6の形状配置を基準とする各歪み含有参照マーカ位置データの形状配置の変化は、形状配置合わせ変換M3d、M3e、およびM3fに比べると極めて小さいので、形状配置合わせ変換M3d、M3e、およびM3fは、それぞれ、原参照マーカ位置データv6についての形状配置を基準とした配置調整済みマーカ位置データv6’、v7’、およびv8’についての相対的な形状配置、すなわち、各配置調整済みマーカ位置データについての形状配置の相互関係を表わしていることになる。
【0443】
図45に示されるように各配置調整済みマーカ位置データの配置合わせが成功する場合は、任意の形状配置に対する配置調整済みマーカ位置データv6’、v7’、およびv8’のそれぞれの相対的な形状配置は、検査規格などによって定められた所定範囲内のばらつきを有する略同一の形状配置となるので、形状配置合わせ変換M3d、M3e、およびM3fをそれぞれ表す複数の変換行列は略同一の変換行列となる。
【0444】
しかし、図46に示されるように各配置調整済みマーカ位置データについての配置合わせが失敗した場合は、配置調整済みマーカ位置データv6’、v7’、およびv8についての相対的形状配置変換をそれぞれ表す複数の変換行列は略同一の変換行列とはならない。
【0445】
従って、配置合わせ可否判定処理の原理の概要において説明したように、それぞれの相対的形状配置変換に基づいて、複数の配置調整済みマーカ位置データの基準マーカ位置データv5に対する配置合わせが成功しているか否か、すなわち、原参照形状データd7が、基準形状データd6に対して配置合わせ可能な配置合わせ可能形状データであるか否かを判定することができるとともに、配置合わせに使用されたマーカが含まれる原参照形状データd7を得た三次元デジタイザ2の装置配置情報d4についても適切であったか否かを判定することもできる。
【0446】
なお、マーカ配置調整部19において原参照マーカ位置データv6が基準マーカ位置データv5への配置合わせを試みられなかった場合においても、図45に示される例と同様に、形状配置合わせ変M3eおよびM3fとして与えられる相対的形状配置変換によって、原参照マーカ位置データv6についての形状配置を基準とした配置調整済みマーカ位置データv7’およびv8’についての相対的な形状配置を表すことができる。
【0447】
なお、相対的形状配置変換として表された、複数の配置調整済みマーカ位置データについての形状配置の相互関係を評価するための評価値を求め、複数の配置調整済みマーカ位置データの配置合わせが成功したか否かを判定する手法に関する評価値の取得方法および判定用閾値th1の設定方法などについは、実施形態1に係る配置合わせ可否判定部13Aについての説明における判定手法と同様の種々の取得方法および設定方法を採用し得る。
【0448】
このように、図45の例では、配置調整済みマーカ位置データv6’、v7’、およびv8’が原参照マーカ位置データv6から生成される過程における、各配置調整済みマーカ位置データについてのそれぞれの形状配置の変動情報である、形状配置合わせ変換M3d、M3e、およびM3fのそれぞれによって、形状配置、装置配置、その他の座標空間における任意の配置を基準とする各配置調整済みマーカ位置データについての相対的な形状配置を与える相対的形状配置変換を表すことができる。また、座標間の関係が既知であれば、配置調整済み参照形状データが存在している座標系とは異なる座標系における配置を基準とすることもできる。
【0449】
以上に説明したように、配置合わせ可否判定部13Bは、1以上の基準形状データd6と原参照形状データd7とが対象物についての1の全体的な三次元形状を表すように、原参照形状データd7についての形状配置をマーカデータ対応関係d13に基づいて調整することができるか否かを、複数の配置調整済みマーカ位置データがそれぞれ表す複数の三次元形状についての形状配置の相互関係に基づいて判定する判定処理を行う。
【0450】
基準マーカ位置データd11と原参照マーカ位置データd12との相互関係によって、両者の配置合わせの可否を判定する場合には、それぞれが表すマーカ位置形状が完全な合同図形であるならば、マーカデータ対応関係d13に従って、それぞれの各マーカの三次元位置が完全に一致する状態を正しい配置合わせの状態であると判定できるが、三次元デジタイザ2の測定誤差のために、基準マーカ位置データd11と原参照マーカ位置データd12が表すマーカ位置形状が合同となることは、実際には、ほとんど起こりえない。
【0451】
従って、基準マーカ位置データd11と原参照マーカ位置データd12との相互関係によっては、基準マーカ位置データd11と原参照マーカ位置データd12とが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない。
【0452】
これに対して、異なるマーカ位置形状を表す複数の配置調整済みマーカ位置データについての形状配置の相互関係に基づいて原参照形状データd7についての配置合わせの可否を判定する本実施形態の手法を採用すれば、マーカの三次元位置によって表される複数の識別点が設けられた対象物上の測定範囲(第2領域)における3以上の着目識別点のそれぞれの位置を表現した原参照マーカ位置データd12から生成された複数の歪み含有参照マーカ位置データd14、または、1以上の歪み含有参照マーカ位置データd14および原参照マーカ位置データd12からなる複数の第3位置データが、原参照マーカ位置データd12の測定範囲と重なる部分を有する測定範囲(第1領域)における3以上の着目識別点のそれぞれの位置を表現した基準マーカ位置データd11に配置合わせさることによって生成された、複数の配置調整済みマーカ位置データについての形状配置の相互関係に基づいて、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かが判定される。
【0453】
従って、基準マーカ位置データd11と原参照マーカ位置データd12とについての形状配置の相互関係によっては、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かが判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0454】
また、配置合わせ可否判定部13Bは、この相互関係を、例えば、複数の配置調整済みマーカ位置データのそれぞれが原参照マーカ位置データd12から生成される過程における各配置調整済みマーカ位置データについての形状配置の変動情報に基づいて求める手法を採用し得る。
【0455】
形状配置の変動情報に基づいてこの相互関係を求める手法を採用すれば、生成された複数の配置調整済みマーカ位置データがそれぞれ表す三次元形状間の形状配置を解析するなどして該相互関係を求める必要が無く、配置調整済みマーカ位置データが生成される過程における形状配置の変動情報に基づいて該相互関係を求めることができるので、原参照マーカ位置データd12についてのマーカ位置形状に関わらず、正確な相互関係を求めることができ、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0456】
なお、例えば、原参照マーカ位置データd12を構成する同一直線上にない3点以上のマーカの三次元位置にそれぞれ対応する複数の配置調整済みマーカ位置データの3点以上マーカの三次元位置が表すマーカ位置形状間の相互関係に基づいて、複数の配置調整済みマーカ位置データがそれぞれ表すマーカ位置形状についての形状配置の相互関係を求める手法などを採用し得る。
【0457】
また、実施形態1に係る配置合わせ可否判定部13Aと同様に、配置合わせ可否判定部13Bにおいても、各配置調整済みマーカ位置データに対応する各装置配置情報d4に着目することによって配置合わせの可否を判定してもよい。
【0458】
[実施形態2に係る装置およびシステムの動作フロー:]
次に、図29、図30および図47に示されるフローチャートを用いて三次元形状測定システム500B、三次元形状データ処理システム300Bおよび三次元形状処理装置100Bの動作フローを説明する。
【0459】
図29は、三次元形状測定システム500Bによって行われる、対象物1bの全体的な三次元形状を表す形状データを生成する手順ステップS1Bの概要を例示するフローチャートである。
【0460】
また、図30は、三次元形状データ処理システム300Bによって行われる、図29のステップS110に記載された複数の第2の装置配置情報を生成する処理についての概要を例示するフローチャートである。
【0461】
また、図47は、三次元形状処理装置100Bによって行われる、配置合わせ可否判定処理(図30のステップS230B)についての概要を例示するフローチャートである。
【0462】
実施形態1に係る図29、図30および図31に記載されたフローチャートと、実施形態2に係る図29、図30および図47に記載されたフローチャートとでは、実質的には、図31および図47に記載された配置合わせ可否判定処理(ステップS230およびS230B)のフローチャートのみが異なるものである。
【0463】
従って、実施形態2に係る動作のフローとしては、以下に図47に記載された配置合わせ可否判定処理(ステップS230B)のみを説明する。
【0464】
図47のステップS410において、形状データ取得部10Bは、供給された複数のマーカが添付された対象物1bについての複数の判定用形状データd1のうち、1以上の判定用形状データd1を基準形状データd6として取得するとともに、1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状であって、対象物1bに貼付された複数のマーカのうち3以上のマーカ群の三次元形状が含まれる三次元形状を表す形状データを含んだ他の判定用形状データd1を原参照形状データd7として取得し、1以上の基準形状データd6と原参照形状データd7とをマーカ位置データ取得部16およびマーカ配置調整部19へと供給する。
【0465】
次に、マーカ位置データ取得部16は、供給された1以上の基準形状データd6および原参照形状データd7について、それぞれ含まれる全てのマーカの三次元位置を求め、基準形状データd6についての全てのマーカの三次元位置と、原参照形状データd7についての全てのマーカの三次元位置とから、これらの形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置を探索し、1以上の基準マーカ位置データd11において探索された3以上のマーカの三次元位置を、1以上の基準マーカ位置データd11として生成して対応関係取得部17およびマーカ配置調整部19へと供給する(ステップS420)。
【0466】
また、原参照マーカ位置データd12において探索された3以上のマーカの三次元位置を原参照マーカ位置データd12として生成し、対応関係取得部17、マーカ歪み付与部18およびマーカ配置調整部19へ供給する(ステップS430)。
【0467】
対応関係取得部17は、供給された1以上の基準マーカ位置データd11および原参照マーカ位置データd12のそれぞれが表す略合同なマーカ位置形状間の対応関係などに基づいて、各基準マーカ位置データd11についての各マーカの三次元位置と原参照マーカ位置データd12についての各マーカの三次元位置との対応関係を表すマーカデータ対応関係d13を生成しマーカ配置調整部19へ供給する(ステップS440)。
【0468】
マーカ歪み付与部18は、別途制御処理部15から供給された三次元デジタイザ2の測定精度d18などに基づいて、供給された原参照マーカ位置データd12についての各マーカの三次元位置の少なくとも1つを変更することによって、原参照マーカ位置データd12が表す三次元形状である原参照マーカ位置形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成し、マーカ配置調整部19へと供給する(ステップS450)。
【0469】
マーカ配置調整部19は、供給されたマーカデータ対応関係d13に基づいて、原参照マーカ位置データd12および、1または複数の歪み含有参照マーカ位置データd14、あるいは複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データについての各マーカの三次元位置とが、1の座標系においてそれぞれなるべく一致するように、原参照マーカ位置データd12が表すマーカ位置形状と、1または複数の歪み含有参照マーカ位置データd14が表すマーカ位置形状とのそれぞれについての位置および姿勢を示す複数の形状配置を調整すること、または、複数の歪み含有参照マーカ位置データd14が表すマーカ位置形状についての複数の形状配置を調整することによって、複数の配置調整済みマーカ位置データを生成する。
【0470】
また、マーカ配置調整部19は、複数の配置調整済みマーカ位置データの生成過程で得られた複数のアフィン変換である形状配置合わせ変換M3を配置合わせ可否判定部13Bへ供給するとともに、基準形状データd6と、形状配置合わせ変換M3によって配置した基準形状データd6を配置調整済み参照形状データd16として記憶部14へ供給する(ステップS460)。
【0471】
配置合わせ可否判定部13Bへ供給された形状配置合わせ変換M3は、配置合わせ可否判定部13Bによって、複数の配置調整済みマーカ位置データがそれぞれ表す複数の三次元形状についての形状配置の相互関係を表す評価値へと変換される(ステップS470)。
【0472】
配置合わせ可否判定部13Bは、この評価値と、制御処理部15から供給される判定用閾値th1とを比較する(ステップS480)。
【0473】
比較の結果、評価値が判定用閾値th1以下であれば、複数の配置調整済みマーカ位置データの配置合わせが成功した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データであると判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS490)、処理はステップS230B(図30)へと戻される。
【0474】
比較の結果、評価値が判定用閾値th1よりも大きければ、複数の配置調整済みマーカ位置データの配置合わせが失敗した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データではないと判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS492)、処理はステップS230Bへと戻されて、配置合わせ可否判定処理の全行程が終了する。
【0475】
以上に説明した三次元形状処理装置100Bによる配置合わせ可否判定処理および図30に記載された三次元形状データ処理システム300Bによる複数の第2の装置配置情報を生成する処理、および図29に記載された処理によって、三次元形状測定システム500Bは、対象物1bの全体的な三次元形状を表す形状データを生成する。
【符号の説明】
【0476】
500A,500B 三次元形状測定システム
300A,300B 三次元形状データ処理システム
100A,100B 三次元形状データ処理装置
1,1a,1b 対象物
2,2a,2b 三次元デジタイザ
2i 仮想三次元デジタイザ
3a マニピュレータ
3b マニピュレータ制御部
4 操作部
5 表示部
6 入出力部
7 抽出部
8 CADシステム
9 記録媒体
10A,10B 形状データ取得部
11 ズレ歪み付与部
12 形状配置調整部
13A,13B 配置合わせ可否判定部
14 記憶部
15 制御処理部
16 マーカ位置データ取得部
17 対応関係取得部
18 マーカ歪み付与部
19 マーカ配置調整部
30 仮想カメラ視線
n1,n2,n1’,n2’,n3,n4 測定範囲
th1 判定閾値
d1,d1a,d1b,d1c,d1d 判定用形状データ
d2,d2a,d2b,d2c,d2d 個別形状データ
d3 測定パラメータ
d4,d4a,d4b,d4b’,d4c,d4d 装置配置情報
d5,d5a,d5b,d5c,d5d CADデータ
d6,d6a,d6b 基準形状データ
d7,d7a,d7b 原参照形状データ
d8,d8a,d8a’,d8b ズレ歪み含有参照形状データ
d11,v5 基準マーカ位置データ
d12,v6 原参照マーカ位置データ
d13,d13a,d13b マーカデータ対応関係
d14,v7,v8 歪み含有参照マーカ位置データ
d16,d16a,d16b,d16c 配置調整済み参照形状データ
d17 配置合わせ済み個別形状データ
d18 測定精度
d19 配置決め精度
d20 対象物配置情報
d21 判定結果
M1,M1a,M1b,M1c,M1d,M1e 形状歪み変換
M2,M2a,M2b 形状配置ずらし変換
M3,M3a,M3b,M3c,M3d,M3e,M3f 形状配置合わせ変換
b1,b2,b3,b4,b5,b6 三次元位置
c1,c2,c3,c4 マーカ位置形状
v1,v2,v3,v4 マーカ位置データ
f1,f2,f3,f4,f5,f6 マーカ
c5 基準マーカ位置形状
c6 原参照マーカ位置形状
c7,c8 歪み含有参照マーカ位置形状
c6’,c7’,c8’ 配置調整済みマーカ位置形状
v6’,v7’,v8’ 配置調整済みマーカ位置データ
【技術分野】
【0001】
本発明は、対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムに関する。
【背景技術】
【0002】
近年、工業製品の検査の1つとして、CADデータなどの設計データに基づいて作成された工業製品の部品の三次元形状を計測し、計測された三次元形状とCADデータとをコンピュータを用いて比較することによって、その部品が、設計データに対して所定の公差内の形状誤差で作成されたものであるか否かを調べるCAT(Computer-Aided Testing)が行われている。
【0003】
CATに用いられる三次元形状の測定は、しばしば、物体表面上の多くの点の三次元座標を短時間に非接触で測定することができる三次元デジタイザ(「三次元測定機」などとも称する)を用いた三次元測定(三次元計測)によって行われる。
【0004】
三次元デジタイザには、ステレオ画像法などを用いる受動型、光レーダ法や光投影法などの能動型、およびそれらを組合わせた能動受動型とがある。例えば、ステレオ画像法を用いる三次元デジタイザでは、複数のカメラを用いて互いに異なる複数の方向から測定対象物を撮影し、得られた複数の画像から三角測量の原理によって、測定対象物上の各点の三次元座標を算出する三次元測定を行う。
【0005】
また、光投影法を用いる三次元デジタイザは、測定対象物に対して投射装置から検出光を投射し、測定対象物からの反射光をカメラの撮像素子で受光する。検出光としてスリット光を用いたものがスリット光投影法(光切断法ともいう)である。スリット光投影法では、スリット光を偏向して測定対象物を光学的に走査し、測定対象物の表面形状に基づくスリット光の変形の程度から、三角測量の原理によって測定対象物上の各点の三次元座標を算出する三次元測定を行う。なお、これら各点の三次元座標の集合を「三次元形状データ」または「形状データ」などと称する。
【0006】
このように、三次元デジタイザは、そのカメラおよび投射装置などに面している対象物の形状のみを測定することが可能であり、三次元デジタイザに面していない側の対象物表面の形状は測定することができない。また、三次元デジタイザが三次元測定することができる範囲は、カメラ間などの基線長、カメラの画角および被写界深度などによって定められる所定の立体的な範囲(「測定範囲」とも称する)によっても制限されており、測定範囲の大きさが対象物よりも小さいこともしばしばある。
【0007】
このため、部品の全体的(全周的)な形状をCATによる検査対象として測定するためには、部品に対して三次元デジタイザの位置や姿勢を変えることにより、異なる複数の方向から複数回の三次元測定を行い、得られた複数の三次元形状データが、部品についての全体的な三次元形状を表すように、各三次元形状データが表す三次元形状の位置および姿勢を示す配置(「形状配置」とも称する)をそれぞれ調整することによって、部品の全体的な形状を表すCAT用の形状データを生成する必要がある。
【0008】
なお、このような複数の三次元形状データについての各形状配置の調整は、それら複数の三次元形状データについての複数の三次元形状をそれぞれ本来あるべき形状配置に合わせる調整であることから「配置合わせ」または、「位置合わせ」などとも称される。
【0009】
配置合わせの手法としてはいくつかの手法があるが、1つ目の手法として、対象物上で測定範囲が重複するように対象物に対して異なる複数の方向から複数回の三次元測定を行って、各測定範囲の三次元形状を表す複数の形状データを得た後、例えば、ICP(Iterative Closest Points)法を用いることで、得複数の形状データそれぞれについての測定範囲が重複している部分の三次元形状間の対応関係に基づいて、各形状データについての配置合わせを行う手法がある。特許文献1では、1つ目の手法が採用されている。
【0010】
また、配置合わせの2つ目の手法として、複数のマーカが貼付された対象物に対して1つ目の手法と同様の三次元測定を行って、対象物の三次元形状のうち、対象物上で重複部分を有する2つの測定範囲の三次元形状を表すそれぞれ表す2つの形状データを得た後、2つの測定範囲の重複部分に存在する3以上の複数のマーカの位置をそれぞれ代表的に表す複数の三次元座標(「三次元位置」とも称する)からなる「マーカ位置データ」を各形状データについてそれぞれ求め、各形状データそれぞれにおけるマーカ位置データ間の対応関係に基づいて、各形状データについての配置合わせを行う手法などがある。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−303839号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1が採用するICP法は、反復演算を繰り返すことにより複数の形状データが表す各三次元形状間の面と面との距離が最小になるような座標変換情報を求めるアルゴリズムであるため、ICP法を適用して、相互に略同一の形状を有する複数の三次元形状を配置合わせする場合には、例えば、平面同士や、曲率が一定の曲面同士など、ICP法を適用する三次元形状の特徴によっては配置合わせに失敗する場合がある。
【0013】
図1は、ICP法による配置合わせの失敗例を示す図である。図1の例では2つの形状は、重なり合う部分が互いに密着するように配置合わせされているが、上下方向(矢印Y1方向)には、本来あるべき位置からずれて配置合わせされてしまっている。
【0014】
このように、検査対象の部品を測定して得られた複数の形状データについての略同一の三次元形状部がICP法による配置合わせに不向きな形状である場合には、検査対象の部品の全体的な三次元形状を表す形状データを正確に生成することができない。
【0015】
つまり、特許文献1の手法では、複数の形状データに対して配置合わせを試みた結果、例えば、それらについての三次元形状同士が本来あるべき配置からずれて重なり合っているものの、それら三次元形状同士の面と面との距離がほとんど無いような場合には、配置合わせ後の形状データ間の相互関係によっては、配置合わせの誤りを検出できないという問題がある。
【0016】
また、2つ目の配置合わせ方法においても、複数の測定範囲の重複部分に存在する各マーカの三次元位置が全て誤差なく測定される場合には、各マーカに対応する三次元位置同士が全て一致するか否かによって、複数の測定範囲に対応する形状データ間の配置合わせが正しいか否かを判定できるが、実際に三次元測定される各形状データについては、三次元測定時の測定誤差のために、各マーカの三次元位置は、実際の三次元位置に対して種々の3次元的な方向にずれて測定される。従って、各マーカに対応する三次元位置同士が全て一致することは、通常、あり得ない。このため、配置合わせ後の各形状データのマーカ位置データの相互関係によっては、正しい配置合わせであるか否かを判定することが困難であるという問題がある。
【0017】
また、配置合わせが正しいか否かをオペレータが目視で判定する場合には、例えば、判定対象の複数の形状データを取得する三次元測定時における対象物上での三次元デジタイザの測定範囲の配置を記憶しておき、この配置と、透視投影などによって表示装置上に二次元画像として表示された、配置合わせ後の形状データについての配置とを対比することによって、形状データについての配置合わせにおいて許容できない配置ズレが生じていないかどうかを検証するとともに、三次元形状間の重なりの具合が適正範囲内であるか否かを、表示された画像間の相互関係を目視に基づいて判定することによって、微視的な配置ズレが生じていないかどうかを検証することが必要となる。
【0018】
これらの検証を効率的に行うためには、検証部位や視線の角度を変更するために透視投影の視点を様々に変更すること、全体的・部分的な検証のために表示画像の拡大・縮小をすること、および三次元形状間の区別を容易にするための色彩・パターンを変更することなどが必要であるため、判定処理に手間が掛かり、配置合わせの可否を判定する「配置合わせ可否判定処理」を多くの形状データに対して行うことが困難であるという問題がある。
【0019】
また、配置合わせの可否を客観的な指標によらずに判定することから、オペレータの熟練度などによって、判定結果が異なったり、所要時間の長短が生ずるという問題もある。
【0020】
そこで、本発明は、対象物の三次元形状を測定して得られる三次元形状データについての配置合わせの可否を判定する手法を改善する技術を提供することを目的とする。
【課題を解決するための手段】
【0021】
上記の課題を解決するために、請求項1の発明は、対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4形状データを生成する形状配置調整手段と、単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4形状データについての形状配置の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0022】
また、請求項2の発明は、対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みる形状配置調整手段と、単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記派生データ生成処理において前記複数の第3形状データが生成されるときの前記第2形状データについての複数の形状配置の変動情報と、前記配置合わせ処理における前記複数の第3形状データについての複数の形状配置の変動情報とが、それぞれ合成された複数の形状配置の変動情報の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0023】
また、請求項3の発明は、請求項1または請求項2に記載された三次元形状データ処理装置であって、前記複数の幾何学的状態は、(a)前記所定の座標系における三次元的な位置および姿勢に相当する形状配置のズレ状態と、(b)三次元的な歪み状態と、のうち、少なくとも一方が互いに異なる状態であることを特徴とする。
【0024】
また、請求項4の発明は、請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、前記複数の第3形状データのうちのひとつは、前記第2形状データ自身であることを特徴とする。
【0025】
また、請求項5の発明は、請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、前記複数の第3形状データのすべては、前記第2形状データとは異なる幾何学的状態を表現していることを特徴とする。
【0026】
また、請求項6の発明は、請求項1から請求項5のいずれか1つの請求項に記載された三次元形状データ処理装置と、前記三次元形状データ処理装置で用いる前記第1形状データと前記第2形状データとを生成する形状データ生成手段と、を備えることを特徴とする。
【0027】
また、請求項7の発明は、請求項6に記載された三次元形状データ処理システムであって、前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成することを特徴とする。
【0028】
また、請求項8の発明は、請求項6に記載された三次元形状データ処理システムであって、前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、三次元形状を測定して形状データを取得する測定装置を用いて測定された前記対象物についての形状データに基づいて生成することを特徴とする。
【0029】
また、請求項9の発明は、請求項6から請求項8のいずれか1つの請求項に記載された三次元形状データ処理システムであって、前記判定手段において前記再現の可能性を否定する判定結果が出たときには、(a)前記形状データ生成手段は、前記第1領域および前記第2領域のいずれとも異なる前記対象物上の第3領域の三次元形状を表現する第5形状データを、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成し、(b)前記取得手段は、前記第2形状データに替えて前記第5形状データを取得することを特徴とする。
【0030】
また、請求項10の発明は、対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、三次元測定を行って前記複数の個別形状データを取得する測定装置と、前記測定装置と前記対象物とを相対的に配置する配置手段と、請求項6から請求項9のいずれか1つの請求項に記載された三次元形状データ処理システムと、を備え、前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする。
【0031】
また、請求項11の発明は、複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4位置データを生成する形状配置調整手段と、単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4位置データについての形状配置の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0032】
また、請求項12の発明は、複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みる形状配置調整手段と、単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記配置合わせ処理における前記複数の第3位置データのそれぞれについての形状配置の変動情報の相互関係に基づいて判定する判定手段と、を備えることを特徴とする。
【0033】
また、請求項13の発明は、請求項11または請求項12に記載された三次元形状データ処理装置と、前記三次元形状データ処理装置で用いる前記第1位置データと前記第2位置データとのそれぞれの生成に用いられる、前記第1領域についての前記対象物の三次元形状を表現した第1形状データと、前記第2領域についての前記対象物の三次元形状を表現した第2形状データとを生成する形状データ生成手段と、を備えることを特徴とする。
【0034】
また、請求項14の発明は、複数の識別点が設けられた対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、三次元測定を行って前記複数の個別形状データを取得する測定装置と、前記測定装置と前記対象物とを相対的に配置する配置手段と、請求項13に記載された三次元形状データ処理システムと、を備え、前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする。
【発明の効果】
【0035】
請求項1の発明によれば、対象物上の第2領域の三次元形状を表現した第2形状データに基づいて生成された複数の第3形状データが、第2領域と重なる部分を有する第1領域の三次元形状を表現した第1形状データに対して配置合わせされた後の複数の第4形状データについての形状配置の相互関係に基づいて、第1形状データと第2形状データとが配置合わせによって所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定するので、第1形状データと第2形状データとの相互関係によっては、第1形状データと第2形状データとが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0036】
また、請求項11の発明によれば、複数の識別点が設けられた対象物上の第2領域における3以上の着目識別点のそれぞれの位置を表現した第2位置データに基づいて生成された複数の第3位置データが、第2領域と重なる部分を有する第1領域における3以上の着目識別点のそれぞれの位置を表現した第1位置データに配置合わせさることによって生成された複数の第4位置データについての形状配置の相互関係に基づいて、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かを判定するので、第1位置データと第2位置データとについての形状配置の相互関係によっては、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【図面の簡単な説明】
【0037】
【図1】ICP法による三次元形状の配置合わせの失敗例を示す図である。
【図2】実施形態に係る三次元形状測定システムおよび三次元形状データ処理システムの構成例を示すブロック図である。
【図3】実施形態に係る三次元形状データ処理装置の機能構成を例示するブロック図である。
【図4】対象物に対する測定範囲の設定例を示す図である。
【図5】対象物に対する測定範囲の設定例を示す図である。
【図6】対象物についての個別形状データの取得を説明する図である。
【図7】対象物についての個別形状データの取得を説明する図である。
【図8】2つの個別形状データが1の座標系に座標変換された様子を示す図である。
【図9】2つの個別形状データが配置合わせされた様子を示す図である。
【図10】凹凸のある形状データ間の異なる配置関係の例を示す図である。
【図11】図10に示される形状データの配置合わせが成功した例を示す図である。
【図12】形状データの配置合わせが失敗した例を示す図である。
【図13】基準形状データと原参照形状データの取得を説明する図である。
【図14】基準形状データと原参照形状データを例示する図である。
【図15】基準形状データと原参照形状データを例示する図である。
【図16】CADデータから判定用形状データを生成する様子を説明する図である。
【図17】歪みの付与により生成されるズレ歪み含有参照形状データを例示する図である。
【図18】配置ズレの付与により生成されるズレ歪み含有参照形状データを、三次元測定によって生成する様子を説明する図である。
【図19】配置ズレの付与により生成されるズレ歪み含有参照形状データを、三次元測定によって生成する様子を説明する図である。
【図20】原参照形状データと実測により生成されるズレ歪み含有参照形状データの関係を説明する図である。
【図21】測定装置の装置配置の変動を説明する図である。
【図22】配置ズレを付与されたズレ歪み含有参照形状データを演算によって生成する様子を説明する図である。
【図23】配置ズレを付与されたズレ歪み含有参照形状データを演算によって生成する様子を説明する図である。
【図24】基準形状データと原参照形状データとズレ歪み含有参照形状データとが1の座標系に変換された様子を説明する図である。
【図25】配置調整済み参照形状データが生成される過程を例示する図である。
【図26】配置合わせが成功した配置調整済み参照形状データを例示する図である。
【図27】配置合わせが失敗した配置調整済み参照形状データを例示する図である。
【図28】配置調整済み参照形状データが生成される過程を例示する図である。
【図29】対象物の全体的な三次元形状を表す形状データを作成する手順例の概要を示すフローチャートである。
【図30】第2の装置配置情報を生成する手順例の概要を示すフローチャートである。
【図31】配置合わせ可否判定処理の手順例の概要を示すフローチャートである。
【図32】変形例に係る三次元形状測定システムおよび三次元形状データ処理システムの構成例を示すブロック図である。
【図33】変形例に係る三次元形状データ処理装置の機能構成を例示するブロック図である。
【図34】マーカが貼付された対象物に対する測定範囲の設定例を示す図である。
【図35】マーカが貼付された対象物の個別形状データを例示する図である。
【図36】マーカに基づいて配置合わせされた個別形状データを例示する図である。
【図37】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図38】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図39】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図40】マーカ位置形状に起因した配置合わせの誤りを説明する図である。
【図41】マーカが貼付された対象物についての基準形状データおよび原参照形状データの生成例を説明する図である。
【図42】マーカが貼付された対象物についての基準形状データおよび原参照形状データの生成例を説明する図である。
【図43】、マーカ位置データ取得部および対応関係取得部の動作例を説明する図である。
【図44】歪み含有参照マーカ位置データの生成例を説明する図である。
【図45】配置合わせが成功した配置調整済みマーカ位置データの生成過程を説明する図である。
【図46】配置合わせが失敗した配置調整済みマーカ位置データの生成過程を説明する図である。
【図47】配置合わせ可否判定処理の手順例の概要を示すフローチャートである。
【発明を実施するための形態】
【0038】
<実施形態1について:>
[三次元形状測定システム500Aおよび三次元形状データ処理システム300A:]
図2は、実施形態1に係る三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの構成例を示すブロック図である。
【0039】
図2に示される三次元形状処理装置100A、三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8は、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの主要部をなしており、三次元形状測定システム500Aとして機能する場合と、三次元形状データ処理システム300Aとして機能する場合とがある。
【0040】
三次元形状データ処理システム300Aは、マニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報に基づいて配置された三次元デジタイザ2が対象物1を測定範囲が重複するように複数の方向から測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の形状データ(「判定用形状データ」と称する)を生成するとともに、それらの判定用形状データが、例えば、後述するICP法、スピンイメージ法などの、配置合わせ対象の三次元形状間に動的または静的に複数組みの対応点をそれぞれ設定し、これらの対応点に基づいて配置合わせを行う「形状対応点に基づく配置合わせ方法」によって適正に配置合わせ可能なものであるか否かを配置合わせ可否判定処理(後述)によって判定し、配置合わせ可能であると判定された各判定用形状データにそれぞれ対応する第1の装置配置情報を複数の第2の装置配置情報として生成する。
【0041】
三次元形状測定システム500Aは、あらかじめ三次元形状データ処理システム300Aとして機能することによって複数の第2の装置配置情報を生成した後、生成された複数の第2の装置配置情報に基づいて対象物1と三次元デジタイザ2とを相対的に配置し、対象物1の三次元形状を複数の方向から測定して得られる複数の形状データ(「個別形状データ」と称する)にICP法などの形状対応点に基づく配置合わせ方法を適用して対象物1の全体的な三次元形状を表す形状データを生成する。
【0042】
本実施形態においては、三次元形状測定システム500Aと三次元形状データ処理システム300Aとは、同一の構成要素により構成されているが、三次元形状測定システムおよび三次元形状データ処理システムは、例えば、それぞれ同一性能の三次元デジタイザならびにマニピュレータおよびその制御装置などを備えた別個の構成要素により構成されてもよいし、例えば、三次元形状データ処理システム300Aのマニピュレータおよびその制御装置については、三次元形状測定システム500Aのものよりも配置決め精度が高いものを採用してもよい。
【0043】
なお、同一形状の多くの部品に対して、それぞれ形状検査に用いられる形状データを生成する必要がある場合には、先ず、三次元形状データ処理システム300Aによって1つ目の部品を対象として複数の第2の装置配置情報を求めておき、次に、マニピュレータ3aの台座部に対して1つ目の部品と略同一の配置に設置された他の部品についても求められた複数の第2の装置配置情報を適用して三次元形状測定システム500Aによって三次元測定を行えば他の部品についても適正に配置合わせできる個別形状データが測定でき、多くの部品の検査用の形状測定にかかる時間を短縮することができる。ここでの、1つ目の部品に基づく複数の第2の装置配置情報の取得作業は、「ティーチング」などとも称される。
【0044】
次に、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aを構成する主要部について説明する。
【0045】
○三次元デジタイザ2:
三次元デジタイザ2は、対象物1の三次元形状を測定し、その三次元形状を表す形状データを取得する三次元デジタイザであり、本発明の「測定装置」に相当する。三次元デジタイザ2は、三次元形状データ処理装置100Aに接続されており(図3)、三次元形状データ処理装置100Aからの制御命令に従って対象物1の三次元測定を行い、測定した形状データを三次元形状データ処理装置100Aに供給するとともに、後述する変形例に係る実施形態などのように、例えば、対象物上に貼付されたマーカなどを画像処理によって抽出する用途などに供するために、必要に応じて、測定した対象物の画像データを三次元形状処理装置100Aへと供給する。なお、通常、三次元デジタイザ2は、測定時の対象物との距離を示す測定距離を変更することが可能であり、測定距離が長くなると対象物上での測定範囲が拡大することにより得られる形状データの解像度が低くなり、測定距離が短くなると逆に、得られる形状データの解像度は高くなる。
【0046】
三次元デジタイザ2が、三次元形状データ処理システム300Aおよび三次元形状測定システム500Aのそれぞれの構成要素として機能するときは、三次元デジタイザ2は、三次元測定で得た複数の形状データをそれぞれ複数の判定用形状データd1(図3)または複数の個別形状データd2(図3)として三次元形状処理装置100Aへ供給する。
【0047】
ここで、三次元デジタイザ2によって測定された形状データには、通常、測定装置の制御上の誤差、および測定した画像データに含まれるノイズなどのために、同じ配置において同じ測定パラメータに基づいて連続的に三次元測定を行ったとしても測定毎に僅かなばらつきが発生する。
【0048】
また、三次元デジタイザ2においては、三次元測定を正確に行うために形状が既知の校正用対象物などに基づいて校正が行われるが、この校正残差、装置の姿勢および使用中の温度ドリフトなどによっても三次元測定の誤差が発生する。
【0049】
通常、三次元デジタイザ2では、上述した三次元測定の誤差およびばらつきに基づいて、三次元測定の確からしさを表わした「測定精度」が規定されており、形状検査などを行う際には測定精度に留意する必要がある。また、測定精度は、通常、例えば、測定距離などによって定められるいくつかの測定条件ごとにそれぞれ規定されている。
【0050】
三次元デジタイザ2の測定精度d18は、三次元デジタイザ2から三次元形状処理装置100Aに供給されることにより、または操作部4(図3)などから入力することにより、あらかじめ記憶部14(図3)に記憶されており、必要に応じて使用される。
【0051】
また、三次元デジタイザ2としては、測定した対象物の画像データをその内部で処理して形状データを生成する上述したタイプの他に、測定した対象物の画像データを三次元形状データ処理装置100Aへ供給し、画像データから形状データへの変換は、三次元形状データ処理装置100Aにおいて行うタイプのものを採用してもよい。この場合には、三次元デジタイザ2と三次元形状処理装置100Aとで本発明の測定装置を構成することとなる。
【0052】
また、本願発明のうち、マーカが添付された対象物の三次元計測を行わない発明に係る測定装置としては、例えば、画像に基づく三角測量とは異なる方法により三次元測定を行うレーザトラッカーなども採用することができる。
【0053】
○マニピュレータ3aおよびマニピュレータ制御部3b:
マニピュレータ3aは、多関節のアーム部およびアーム部を設置する台座部などから構成される。マニピュレータ3aは、マニピュレータ制御部3bからの制御によって、アーム部を台座部に対して回転させるとともに、アーム部を曲げ伸ばしすることが可能であり、これらの動作によって、アーム部の先端は、台座部を中心とする所定範囲の空間内の任意の位置に所定の範囲の姿勢で配置決めされ得る。アーム部の先端には、三次元デジタイザ2が取り付けられている。
【0054】
マニピュレータ制御部3bは、接続ケーブルを介して三次元形状データ処理装置100Aに接続されており、三次元形状データ処理装置100Aからは、各種の制御命令およびマニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す装置配置情報d4(図3)がマニピュレータ制御部3bへと供給される。
【0055】
マニピュレータ制御部3bは、三次元デジタイザ2が装置配置情報d4に基づく所定の配置に配置決めされるように、マニピュレータ3aの動作を制御する。マニピュレータ制御部3bへの装置配置情報d4の入力は、測定者が、マニピュレータ制御部3bに設けられた不図示の入力部から入力することなどによっても行われ得るとともに、マニピュレータ3aの動作についても、この入力部から制御し得る。
【0056】
なお、通常、装置配置情報d4は、記憶部14(図3)に記憶されているマニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20に基づいて、対象物1に対して、三次元デジタイザ2を所望の相対的な配置に配置決めできるように設定される。従って、三次元デジタイザ2は、対象物1と三次元デジタイザ2との相対的な配置関係に基づいて設定された装置配置情報d4に基づいて配置決めされることになる。
【0057】
マニピュレータ制御部3bは、装置配置情報d4に基づいた三次元デジタイザ2の配置決めが終了すると、配置決め終了の合図および装置配置情報d4の確認のために、装置配置情報d4を三次元形状処理装置100Aにフィードバックする。三次元形状処理装置100Aは、三次元デジタイザ2の配置決めが終了したことを認識すると、三次元デジタイザ2に三次元測定を実行させる。なお、装置配置情報d4については、三次元デジタイザ2自体の三次元形状や、三次元デジタイザ2に取り付けられた装置配置検出用の構造物の三次元形状を他の形状測定機などを用いて測定することによって取得してもよいし、三次元デジタイザ2に装置配置情報d4を検出可能なセンサを設けて、その出力を取得するなどしても良い。
【0058】
ここで、マニピュレータ3aには、通常、アーム部の先端に取り付けられた三次元デジタイザ2などの位置および姿勢の配置決めに際して、取り付けられたものの重量などに応じた配置決めの誤差が発生するため、配置決めの確からしさを表わした「配置決め精度」が規定されている。
【0059】
マニピュレータ3aの配置決め精度d19は、マニピュレータ制御部3bから三次元形状処理装置100Aに供給されることにより、または操作部4(図3)などから入力することにより、あらかじめ記憶部14(図3)に記憶されており、必要に応じて使用される。
【0060】
また、図3に示される構成の他に、マニピュレータ3aのアーム部に対象物1を取り付け、固定された三次元デジタイザ2に対して、対象物1を移動される構成などを採用してもよい。
【0061】
マニピュレータ3aおよびマニピュレータ制御部3bは、本発明の「配置手段」に相当する。配置手段としては、マニピュレータの他に、接触式プローブによって対象物の形状を測定するCMM(座標測定機 Coordinate-measuring machine)の接触式プローブを取り外し、三次元デジタイザ2などを取り付け可能なマウント部を備えたものなどの、三次元デジタイザ2などを複数の配置に設定可能な各種の配置決め機構が採用され得る。
【0062】
また、配置手段としては、ベルトコンベアや回転ステージなどの、対象物を複数の配置に設定可能な各種の配置決め機構を採用してもよく、また、三次元デジタイザ2および対象物1をそれぞれ複数の配置に設定可能な各種の配置決め機構を共に採用しても良い。
【0063】
なお、対象物1を移動させる場合も、三次元デジタイザ2を移動させる場合と同様に、対象物1と三次元デジタイザ2との相対的な配置関係に基づいて設定された対象物1の配置情報に基づいて、配置手段は、対象物1の配置決めを行う。
【0064】
すなわち、本発明の配置手段は、三次元デジタイザ2などの測定装置と対象物とを相対的に配置する配置手段である。
【0065】
○CADシステム8:
CADシステム8は、種々の機械装置、製品、実用品、その他の物品について設計三次元形状を表す情報であるCADデータを作成しまたは蓄積するものである。また、CADデータは、設計三次元形状を表す情報の他に、これら各物品の材料、材質、各部の表面粗さ、寸法公差などの特性情報を含んでいてもよい。CADシステム8は、通信回線などを介して三次元形状データ処理装置100Aに接続されている。
【0066】
三次元形状データ処理システム300Aが機能している場合には、三次元形状処理装置100Aは、操作部4(図3)から入力された部品番号などの対象物の識別情報に対応するCADデータの供給を要求し、CADシステム8は、その要求に応じたCADデータd5(図3)を三次元形状処理装置100Aへと供給する。ここで、CADデータd5は、部品単位のデータであってもよいし、1つの部品が部品の特徴部である部位毎に分割されたデータであっても良い。
【0067】
[実施形態1に係る配置合わせ可否判定処理の原理の概要:]
次に、三次元形状処理装置100Aの説明に先立って、実施形態1に係る配置合わせ可否判定処理の原理の概要を、三次元形状測定システム500Aの動作の概要と合わせて説明する。
【0068】
○三次元形状測定システム500Aの動作の概要:
図4および図5は、三次元形状測定システム500Aが、複数の方向から対象物の三次元形状を測定するときの測定範囲の設定を説明する図である。図4では、装置配置情報d4aおよびd4bに基づいて配置決めされた三次元デジタイザ2が異なる複数の方向から、対象物1を三次元測定している。また、図4に示された異なる三次元デジタイザ2aおよび2bのように複数の三次元デジタイザを組合わせて三次元測定してもよい。このように、マニピュレータの可動範囲の制限によって1組のマニピュレータと測定装置によっては、対象物の着目部分の全ての三次元形状を測定することができない場合や、マニピュレータの移動時間のために測定所要時間が所定の制限時間を超える場合などでは複数台の測定装置をマニピュレータと組合わせて使用してもよい。また、対象物を回転ステージなどに載置することにより、対象物の全周的な三次元形状を測定してもよい。
【0069】
ここで、測定範囲n1およびn2は、それぞれ装置配置情報d4aおよび装置配置情報d4bに対応する三次元デジタイザ2の測定範囲を示しており、測定範囲n1およびn2にそれぞれ対応する三次元形状を表す形状データは、複数の個別形状データd2(図3)として、三次元形状処理装置100Aに供給される。測定範囲n1およびn2は対象物1上で重複する部分を有しており、その重複部分には、円柱状および四角柱状の部位が設けられている。測定範囲n1およびn2に対応する複数の個別形状データd2は、三次元形状処理装置100AによってICP法などを用いて、主に円柱状および四角柱状の部位に基づいて配置合わせされる。このように、ICP法などの形状対応点に基づく配置合わせ方法を用いる場合には、配置合わせされる形状データを取得するための測定範囲の重複部分に、凹凸形状が存在するように、測定範囲を設定する必要がある。
【0070】
これらの円柱状および四角柱状の部位のような凹凸などを形成する特徴的な形状が重複部分に存在せず、重複部分が、例えば平面である場合などでは、ICP法などの形状対応点に基づく配置合わせ方法を適用しても正しく配置合わせがなされないため、このような場合には、例えば、後述するマーカに基づく配置合わせなどが採用される。
【0071】
図5では、四角錐状の対象物1aに対する測定範囲の設定例が示されており、相互に重複する部分を有する測定範囲n1からn4が時計回りに隙間無く設定されている。各測定範囲に対応する複数の個別形状データd2は、主に、重複部分に設けられた円柱状の部位に基づいて、ICP法などによって位置合わせされる。欠落がない形状データを取得する必要がある場合には、このように対象物の検査対象などの着目部分において、すきまなく測定範囲を設定する必要がある。
【0072】
図6および図7は、対象物についての個別形状データの取得を説明する図である。図6では、凹凸のある曲面によって形成される対象物1の三次元形状を、矢印Y2に沿って装置配置情報d4aおよび装置配置情報d4bに基づいて順次配置決めされ、各配置においてそれぞれ測定範囲n1およびn2を有する三次元デジタイザ2を用いて測定している。
【0073】
ここで、測定範囲n1およびn2の一部は、対象物1上で重複しているため、測定される形状データは、略同一の三次元形状を表す形状データを有することとなる。
【0074】
図7は、図6に示された、装置配置情報d4aおよび装置配置情報d4bに基づいて配置決めされ三次元デジタイザ2がそれぞれ測定した個別形状データd2aおよびd2bを、それらが表す三次元形状として示している。
【0075】
図8は、図7に示された個別形状データd2aおよびd2bが、1の座標系に座標変換された様子を示す図である。なお、図8から図12においては、三次元形状間の配置ずれ量を、三次元形状の大きさに対して誇張して表示している。
【0076】
この座標変換は、装置配置情報d4aおよびd4bに基づいて行うことができる。すなわち、装置配置情報d4aおよびd4bと、装置配置情報d4aおよびd4bに基づいて配置決めされた三次元デジタイザ2の実際の配置とには、既述したマニピュレータ3aの配置決め誤差に起因した誤差があり、この誤差のために図8に示されるように、個別形状データd2aとd2bとは、通常、重なることがない。
【0077】
図9は、図8に示された配置がずれた2つの個別形状データd2aおよびd2bが配置合わせされた様子を示す図であり、この配置合わせは、個別形状データd2aおよびd2bがそれぞれ表す三次元形状の略同一の形状部分に基づいて、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法によって行われている。
【0078】
ここで、配置合わせ対象の複数の三次元形状データのそれぞれをスピンイメージに変換し、各スピンイメージ間で複数組みの対応点を探索することによって三次元形状データ間に複数組みの対応点を設定し、三次元形状データ間の配置合わせを行う手法を、本出願においては「スピンイメージ法」と称する。
【0079】
なお、「スピンイメージ」は、三次元形状データの各点について、当該各点とその周囲の各点との三次元的な位置関係に基づいて、三次元形状データの配置に依存しない所定の特徴量を特定することによって得られる画像である。
【0080】
スピンイメージは、三次元形状データの配置に依存しないため、スピンイメージ法では、通常、三次元形状データ間の対応関係が静的に求められて三次元形状データ間の配置合わせが行われる。
【0081】
○実施形態1における配置合わせ可否判定処理の原理の概要:
次に、2つの形状データにICP法を適用して形状データ間の配置合わせを行う場合を例に、ICP法について説明する。ここで、これら2つの形状データがそれぞれ表す三次元形状は、相互に略同一の三次元形状を含んでおり、図8に示される個別形状データd2aおよびd2bのように、相互にずれて配置されているものとする。
【0082】
ICP法は、毎回の演算毎に配置合わせの基準となる基準形状データと配置合わせされる参照形状データとの対応関係を求め、その対応関係に基づいて各形状データがそれぞれ表す三次元形状の面と面との距離を短くする座標変換情報を求める。
【0083】
求められた座標変換情報に基づく座標変換を参照形状データに施すという座標変換情報の算出および座標変換を繰り返し行うことによって、各三次元形状間の面と面との距離が最小になるような座標変換情報を求めるアルゴリズムを基本とする手法であり、面と面との距離に応じて、その距離を短くする割合を変更する手法など各種の派生方法がある。
【0084】
従って、既述したように、例えば、凹凸の少ない平面状の三次元形状を表す形状データなど、形状データ間の適正な対応関係を求めにくい形状においては、ICP法を適用しても配置合わせに失敗する場合が多くなる。
【0085】
なお、三次元デジタイザ2が取得した形状データにおいては、取得された形状データに対する三次元デジタイザ2の存在方向が判別可能であるため、ICP法における基準形状データと参照形状データとの対応関係の取得は、通常、三次元デジタイザ2側のみから観察される各形状データの三次元形状に基づいて行われる。このため、表裏の誤認識に起因する誤った配置合わせが防止される。
【0086】
また、ICP法は、凹凸のある形状データについては、通常、各形状データが表す三次元形状間の距離の遠近など、各形状データ間の配置関係の影響をあまり受けることなく形状データ間の適切な対応関係を求めることができるので、多くの場合、各形状データ間の当初の配置関係に関わらず配置合わせを成功させることができる。この状態を図10および図11を参照しつつ説明する。
【0087】
図10は、2つの凹凸のある形状データ間の異なる配置関係の例を示す図である。ここでは、凹凸のある形状データとして図9に示された個別形状データd2aおよびd2bが採用されている。
【0088】
個別形状データd2aおよびd2bは、それぞれ配置合わせの基準となる基準形状データおよび配置合わせされる参照形状データとして設定されている。また、形状データe1およびe2は、それぞれ個別形状データd2bの配置を図中の矢印に沿ってずらすことにより生成されており各形状データd2b、e1およびe2は、同一形状を表わし、かつ、個別形状データd2aに対して、それぞれ異なった配置関係である。
【0089】
図11は、図10に示された各形状データd2b、e1およびe2が、ICP法によって配置合わせを試みられた結果、それぞれ形状データd2b’、e1’およびe2’として座標変換され、個別形状データd2aに適切に配置合わせされた状態を示している。
【0090】
このように、凹凸のある形状データ間では、通常、当初の配置関係の影響をほとんど受けることなくICP法によって、適切に配置合わせすることができ、配置合わせされた各形状データは、当初配置に関わらず、通常、略同一の配置に座標変換されている。
【0091】
これに対して、凹凸の少ない形状データ間にICP法を適用する場合には、形状データ間の対応関係を適切に求めることが困難であり、さらに、各データ間の当初の配置関係を変えると対応関係の取得にも影響が生じるため、各データ間の当初の配置のズレが大きくなるにつれて、対応関係も間違った対応関係がより設定されやすくなる。
【0092】
このため、凹凸の少ない形状データ間に複数の異なる当初の配置関係を設定して、各配置関係毎にICP法による配置合わせを試みると、通常、各配置関係毎に配置合わせが失敗するだけでなく、配置合わせ後の形状データの配置は、各配置関係毎に、ばらついてしまう。また、そのばらつき方は、当初の配置のズレが大きくなるにつれて、大きくなる。ここで、上述した配置合わせの失敗例を、図12を参照して説明する。
【0093】
図12は、凹凸の少ない円弧状の断面を有する三次元形状を表す形状データの配置合わせが失敗した例を示す図である。図12では、円弧状の断面を有する三次元形状を表す個別形状データd2fおよびd2gがあり、それぞれ配置合わせの基準となる基準形状データおよび配置合わせされる参照形状データとして設定されている。個別形状データd2gからは、その配置をずらした形状データe3およびe4が生成されており、各形状データd2g、e3およびe4が個別形状データd2fに対して配置合わせを試みられた結果、ICP法によってそれぞれ各形状データd2g’、e3’およびe4’に座標変換された様子を示している。
【0094】
図12に示される例では、各形状データd2g’、e3’およびe4’は、個別形状データd2fに対して、配置合わせが失敗しているとともに、それぞれの配置は相互にばらついている。
【0095】
なお、図10から図12をそれぞれ参照した上記説明においては、各形状データの形状は全て同じであり、配置のみが異なるという前提で説明したが、各形状データそれぞれの形状が相互に多少異なったものであっても配置合わせにおいては配置合わせ対象である形状データ間における略同一形状部の全体にわたって配置合わせの誤差が分散されるので、凹凸のある形状データ間および凹凸の少ない形状データ間のそれぞれについての配置合わせの結果は、通常、上述した配置合わせの結果と同様の結果となる。
【0096】
上記に説明したように、凹凸のある三次元形状を有する形状データ間のICP法による配置合わせにおいては、相互の配置関係が種々に異なったとしても、多少の形状の歪みの有無に関わらず、通常、配置関係にかかわらずほぼ同じ適切な配置に配置合わせされるのに対して、凹凸の少ない三次元形状を有する形状データ間のICP法による配置合わせにおいては、その相互の配置関係が種々に異なった場合、多少の形状の歪みの有無に関わらず、通常、配置合わせは失敗し、かつ、配置合わせされる参照形状データのそれぞれの配置合わせ後の配置は、相互にばらつきを生じ、そのばらつき方は、当初の配置のズレが大きくなるにつれて大きくなる。
【0097】
ここで、例えば、既述したように、図1に示された例では、配置合わせは失敗しているものの形状データが表す形状間の距離はほぼなくなっているため、配置合わせの基準となる基準形状データと配置合わせされる参照形状データとの相互関係に着目して配置合わせの成否(可否)を判定したとしても、必ずしも正しく判定することができない。
【0098】
しかし、例えば、図1に示される例であっても、基準形状データと参照形状データとの配置関係を種々に変更して、それぞれの配置関係毎に配置合わせを試みると、各配置関係に対応する参照形状データのそれぞれの配置についての相互関係は、上記に説明したように、通常、ばらついたものとなる。
【0099】
実施形態1に係る配置合わせ可否判定処理は、このばらつきに着目して、基準形状データと参照形状データとの正しい配置関係が不明である場合であっても、基準形状データに対する当初の配置が種々に異なる複数の参照形状データのそれぞれについて、基準形状データへの配置合わせを施したときに、これら複数の参照形状データについての形状配置のばらつきが少ない場合は、正しい配置への配置合わせが行われているとして配置合わせの可否を判定する処理である。
【0100】
具体的には、参照形状データから基準形状データに対してそれぞれ当初の形状配置が異なる複数の形状データを作成して、それぞれの形状データについて基準形状データへの配置合わせを試みた後、それぞれの形状データについての形状配置の相互関係を表す評価値を求めるとともに、この評価値と、配置合わせの成否を判定するための判定用閾値とを比較することによって配置合わせの可否を判定する。
【0101】
参照形状データが基準形状データに対して配置合わせ可能であると判定された場合は、参照形状データを得た三次元デジタイザ2についての装置配置の設定も適切であり、逆に、参照形状データが配置合わせ可能ではないと判定された場合には、三次元デジタイザ2についての装置配置の設定も適切ではないこととなる。
【0102】
なお、上述したように、この相互関係における配置のばらつきなどは、基準形状データと参照形状データとの配置のズレが大きくなるにつれて、通常、大きくなるので、配置のズレの与え方と判定用閾値とは、システムに対する要求に応じて適切に調整される。
【0103】
なお、配置合わせ可否判定処理における判定方法の詳細については、三次元形状処理装置100Aの説明において後述する。
【0104】
[三次元形状処理装置100A:]
図3は、実施形態に係る三次元形状データ処理装置100Aの各機能部の構成を例示するブロック図である。図3には、各機能部とともに、各機能部間で授受される主な情報が記載されている。また、制御信号などについての記載は省略されている。
【0105】
図3に示されるように、三次元形状処理装置100Aは、操作部4、表示部5、入出力部6、抽出部7、形状データ取得部10A、ズレ歪み付与部11、形状配置調整部12、配置合わせ可否判定部13A、記憶部14および制御処理部15を主に備えて構成される。
【0106】
三次元形状処理装置100Aは、三次元形状データ処理システム300Aの構成要素として機能する際には、供給される複数の判定用形状データd1が適正に配置合わせ可能なものであるか否かを判定する配置合わせ可否判定処理を行って、配置合わせ可能であると判定された判定用形状データd1に対応する装置配置情報を、三次元形状測定システム500Aが複数の個別形状データを測定するときの装置配置情報である第2の装置配置情報として求める処理などを行う。
【0107】
また、三次元形状処理装置100Aが、三次元形状測定システム500Aの構成要素として機能する際には、三次元形状処理装置100Aは、三次元デジタイザ2から供給される複数の個別形状データd2を、ICP法などを用いて配置合わせし、対象物1についての全体的な三次元形状を表す形状データを生成する処理などを行う。
【0108】
図3に示される操作部4は、例えば、キーボード、マウスおよび操作ボタンなどを備えて構成されており、制御処理部15への操作信号の入力や、部品番号などの対象物の識別情報の入力、三次元形状処理装置100Aの各部の制御および処理に使用される処理装置パラメータの設定、マニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20、三次元測定時の三次元デジタイザ2と対象物との距離を示す測定距離および測定範囲を示す画角などの測定パラメータd3の設定、および三次元デジタイザ2の装置配置情報d4の設定などの用途に使用され、設定された処理装置パラメータ、測定パラメータd3および装置配置情報d4などは、制御処理部15によって、記憶部14に記憶される。記憶された測定パラメータd3および装置配置情報d4は、必要時に制御処理部15によって取得されて、それぞれ三次元形状処理装置100Aの各部、三次元デジタイザ2およびマニピュレータ制御部3bに供給される。なお、処理装置パラメータとしては、後述する配置合わせ可否判定処理に用いられる判定閾値th1などが挙げられる。
【0109】
表示部5は、例えば液晶ディスプレイ、CRTなどで構成されて、動画などを表示可能であり、測定された形状データの三次元形状などの画像情報や、各種メッセージ、後述する配置合わせ可否判定処理の判定結果d21(図3)などが表示部5に表示される。また、操作部4から各種パラメータや装置配置情報などが入力される際には、これらの情報は表示部5に表示され、入力値の確認などに供される。
【0110】
入出力部6は、例えばマルチメディアドライブやネットワークのインタフェースなどを備えて構成され、光ディスクなどの記憶媒体9を受け付けるとともに、記憶媒体9およびネットワークを介した情報の授受を制御処理部15との間で行うものである。三次元デジタイザ2からの判定用形状データd1および個別形状データd2、ならびにCADシステム8からのCADデータd5は、三次元デジタイザ2およびCADシステム8からそれぞれ直接入力されるだけでなく、入出力部6によって、記憶媒体9や、ネットワーク経由でも入力され得る。
【0111】
記憶部14は、例えばハードディスク、ROMおよびRAMなどを備えて構成されており、配置合わせされた各種形状データおよび画像データなどの三次元形状処理装置100Aの各部が出力する情報、三次元形状処理装置100Aの各部を制御するために設定された処理装置パラメータ、対象物配置情報d20、測定パラメータd3および装置配置情報d4などの三次元形状測定システム500Aおよび三次元形状データ処理システム300Aの各部に必要なパラメータ、ならびに三次元形状処理装置100Aの各部の動作を制御する制御プログラムなどの恒久的な記憶と、各種情報の一時的な記憶とに使用される。また、三次元デジタイザ2が、その測定した対象物の二次元画像から形状データへの変換を三次元形状処理装置100Aに処理させるタイプのものである場合には、その変換に必要な三次元化パラメータなども記憶部14に記憶される。
【0112】
三次元形状データ処理システム300Aが機能しているときは、配置調整可否判定処理において得られた配置調整済み参照形状データd16および基準形状データd6は、記憶部14に記憶された後、次の配置合わせ可否判定処理における基準形状データd6として用いられるべき判定用形状データd1として、制御処理部15を介して形状データ取得部10Aへと供給される。
【0113】
また、三次元形状測定システム500Aが機能しているときは、配置合わせされた個別形状データd2である配置合わせ済み個別形状データd17は、次の配置合わせにおいて基準形状データd6として用いられるべき個別形状データd2として、制御処理部15を介して形状データ取得部10Aへと供給される。
【0114】
なお、以下に説明する抽出部7、形状データ取得部10A、ズレ歪み付与部11、形状配置調整部12、配置合わせ可否判定部13Aおよび制御処理部15は、CPUで所定の制御プログラムを実行することで実現しても良いし、専用のハードウェア回路を用いて実現しても良い。
【0115】
○制御処理部15:
制御処理部15は、三次元形状処理装置100Aの他の機能部を制御および他の機能部との必要な情報の授受を行うとともに、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aを構成する三次元デジタイザ2、マニピュレータ制御部3bおよびCADシステム8の制御や、これらとの情報の授受などを行う。
【0116】
◎形状データ取得部10A:
○三次元形状データ処理システム300A機能時の形状データ取得部10A:
三次元形状データ処理システム300Aが機能しているときは、形状データ取得部10Aには、三次元デジタイザ2、抽出部7、および制御処理部15から、それぞれ三次元測定された対象物1の形状データ、CADシステム8から供給される対象物1についてのCADデータd5、および記憶部14に記憶されている原参照形状データd7に対応した配置調整済み参照形状データd16および基準形状データd6に基づいた複数の判定用形状データd1であって、1以上の判定用形状データと、それらの表す三次元形状の一部または全部と略同一の三次元形状を表す形状データをそれぞれ有する1以上の他の判定用形状データとを含んだ複数の判定用形状データd1が適宜供給される。
【0117】
形状データ取得部10Aは、供給された複数の判定用形状データd1から基準形状データd6と原参照形状データd7を取得して形状配置調整部12へ供給するとともに、原参照形状データd7をズレ歪み付与部11へ供給する。
【0118】
後述する配置合わせ可否判定処理の信頼性を高める観点から、判定用形状データは、三次元デジタイザ2によって測定されるべき形状データとできるだけ同一の形状を有することが望ましい。
【0119】
しかしながら、ICP法などの形状対応点に基づく配置合わせ方法においては形状データが表す形状間の重複部分が主に用いられること、および、形状の外縁部分を構成する形状データは、形状対応点に基づく配置合わせ方法ではあまり用いられないことなどから、三次元デジタイザ2によって測定されるべき形状データと、その形状データに対応する判定用形状データとが、それぞれ表す三次元形状が相互に多少異なっていたとしても本発明の有用性を損なうことはない。
【0120】
図13は、形状データ取得部10Aが複数の判定用形状データd1から基準形状データd6aおよび原参照形状データd7aを取得する様子を例示説明する図である。
【0121】
図13(a)では、装置配置情報d4aに対応して配置決めされ、測定範囲n1を有する三次元デジタイザ2が対象物1の三次元形状を測定した形状データが、判定用形状データd1aとして形状データ取得部10Aに供給されて、形状データ取得部10Aによって基準形状データd6aとして取得されることを示している。
【0122】
また、図13(b)では、装置配置情報d4bに対応して配置決めされ、測定範囲n2を有する三次元デジタイザ2が対象物1の三次元形状を測定した形状データが、判定用形状データd1bとして形状データ取得部10Aに供給されて、形状データ取得部10Aによって原参照形状データd7aとして取得されることを示している。
【0123】
なお、基準形状データd6aは、配置合わせの基準となる形状データである。例えば、形状検査用の形状データを取得するための一連の三次元測定のうち最初の三次元測定で得られるべき形状データに対応した判定用形状データを三次元測定またはCADデータに基づいて取得したものが基準形状データとして採用される。また、基準形状データd6aに対して既に配置合わせされて記憶部14に記憶されている原参照形状データd7は、新たな配置合わせのための基準形状データとして採用される。
【0124】
基準形状データは、表示部5に表示された複数の判定用形状データの中から、測定者が操作部4からの入力により設定してもよいし、上述のように、初回の三次元測定に対応する判定用形状データおよび既に配置合わせされた原参照形状データを、自動的に基準形状データとして設定してもよい。また、各判定用形状データの生成時に、基準形状データを設定して判別用データを付加し、該付加データを形状データ取得部10Aが取得することによって設定するなどしてもよい。
【0125】
また、原参照形状データd7aとしては、基準形状データd6aに対して配置合わせ可能か否かを未だ判定されていない判定用形状データが採用される。例えば、基準形状データが設定された後に、三次元測定またはCADデータに基づいて形状データ取得部10Aに供給される判定用形状データが、原参照形状データd7aとして設定される。
【0126】
図14および図15は、基準形状データと原参照形状データを例示する図である。図14および図15におけるn1〜n4は不図示の平面状の対象物上に設定された三次元デジタイザ2の測定範囲を、d1e〜d1hは判定用形状データを、d6e〜d6gは基準形状データを、d7e〜d7hは原参照形状データをそれぞれ示している。なお、本出願においては、形状データを座標値ではなく、その表す三次元形状を模式的に表示することによって示している。ここで、図14および図15における、例えば、n1(d1e)(d6e)という表記は、測定範囲n1に対応する判定用形状データd1eが形状データ取得部10Aに供給され、形状データ取得部10Aによって基準形状データd6eとして取得されることを示している。
【0127】
図14(a)は、測定範囲n1およびn2が部分的に重複することによって、基準形状データd6eと原参照形状データd7fが略同一の部分的な三次元形状を共有する例を示している。
【0128】
また、図14(b)は、原参照形状データd7fが表す三次元形状の中に、基準形状データd6eが表す三次元形状の全てが含まれる例を示す。このような関係は、例えば、先に高分解能で三次元測定された部分を基準として、その低解像度で三次元測定された周辺部の形状を位置合わせする場合などに採用される。
【0129】
また、図14(c)は、図14(b)と逆に、原参照形状データd7fが表す三次元形状の全てが、基準形状データd6eが表す三次元形状に含まれる例を示す。このような関係は、先に低解像度で三次元測定された大きな領域を基準として、その領域中の特徴部分を高解像度で三次元測定する場合などに採用される。
【0130】
また、図14(d)は、図14(c)に示される基準形状データd6eが表す三次元形状に、死角などによって生じた穴部SH1がある例を示す。このような関係は、その穴部を基準形状データd6eとは異なる方向から、より高解像度で死角が生じないように原参照形状データd7fによって測定し直す場合などに採用される。
【0131】
また、図15(a)は、コの字形の測定漏れ領域SH2を形成する3つの基準形状データd6e〜d6gに対して、測定漏れ領域SH2を1つの原参照形状データd7hが取得される例を示す。
【0132】
また、図15(b)は、2つの基準形状データd6eおよびd6fを完全に覆う測定範囲に対応した原参照形状データd7gが取得される例を示す。
【0133】
また、図15(c)は、部分的に重複する2つの測定範囲n1およびn2に対応する基準形状データd6eおよびd6fに対して、測定範囲n1およびn2とそれぞれ部分的に重複するとともに、相互に部分的に重複する測定範囲n3およびn4に対応する原参照形状データd7gおよびd7hが取得される例を示す。
【0134】
なお、複数の基準形状データd6(図3)が採用される場合は、後述する形状配置調整部12が行う形状配置の調整においては、複数の基準形状データd6の相互関係は変更されることなく原参照形状データd7(図3)との形状配置の調整が行われる。
【0135】
また、過去に行われた配置合わせ可否判定処理において配置合わせされた判定用形状データと、今の配置合わせ可否判定処理における各基準形状データd6との相互関係も、通常は変更されることがなく、配置合わせ可否判定処理が行われる。
【0136】
また、複数の原参照形状データd7が採用された場合、原参照形状データd7ごとに配置合わせ可否判定処理を行ってもよいし、複数の原参照形状データd7に対して同時に配置合わせ可否判定処理を実施して配置合わせ可否の判定を原参照形状データd7ごとに行うようにしてもよい。
【0137】
以上に説明したように、図3に示される形状データ取得部10Aは、対象物1についての複数の三次元形状をそれぞれ表す複数の判定用形状データd1のうち、1以上の判定用形状データd1を1以上の基準形状データd6として取得するとともに、1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状を表す形状データを有する他の判定用形状データd1を原参照形状データd7として取得する。
【0138】
また、基準形状データd6と原参照形状データd7とは、対象物1上で互いに重なる部分を有する各測定範囲についての対象物1の三次元形状をそれぞれ表している。
【0139】
○三次元形状測定システム500A機能時の形状データ取得部10A:
三次元形状測定システム500Aが機能しているときは、形状データ取得部10Aには、三次元デジタイザ2および制御処理部15から、それぞれ三次元デジタイザ2が対象物1の三次元形状を測定した形状データ、および記憶部14に記憶されている配置合わせ済み個別形状データd17に基づいた複数の個別形状データd2が適宜供給される。
【0140】
形状データ取得部10Aは、供給された複数の個別形状データd2から基準形状データd6と原参照形状データd7とを取得して形状配置調整部12へ供給する。
【0141】
◎抽出部7:
次に、CADデータに基づく判定用形状データの生成について説明する。図3に示される抽出部7は、三次元形状データ処理システム300Aが機能しているときに作動する機能部であり、不図示の入力インタフェースを介してCADシステム8と接続されている。抽出部7には、CADシステム8からCADデータd5が、制御処理部15からは測定パラメータd3、装置配置情報d4および対象物配置情報d20がそれぞれ入力される。
【0142】
抽出部7に供給されたCADデータd5は、先ず、対象物配置情報d20に基づいてマニピュレータ3aの台座部に対する対象物の配置に等しくなるように必要な座標変換が施され、次に、装置配置情報d4に基づいて配置された三次元デジタイザ2によって測定されるべき形状データと略同一の三次元形状を表す判定用形状データd1が座標変換されたCADデータd5から抽出される。この抽出処理は、測定パラメータd3、装置配置情報d4および対象物配置情報d20などに基づいて、行われる。
【0143】
また、CADデータd5の座標系を基準として、CADデータd5と対象物とが重なるように仮想三次元デジタイザ2iの配置を変更するなどしたのちに、CADデータd5に基づく判定用形状データd1を抽出するようにしてもよい。
【0144】
図16は、CADデータd5から判定用形状データd1を生成する様子を説明する図である。図16に示されるCADデータd5は、平面部位を表すCADデータd5d、該平面部位上に設けられた四角柱部位および円柱部位をそれぞれ表すCADデータd5a、d5c、およびCADデータd5dの外縁部を表すCADデータd5bによって構成されている。
【0145】
このようにCADシステム8から供給されるCADデータは、部品を形成する各部位単位で構成されていてもよいし、また、部品全体を1単位とするものであってもよい。部位単位のCADデータを用いる場合の必要な部位の指定については、例えば、部品単位のCADデータを対象物と同じ配置になるように座標変換したときに、測定パラメータd3および装置配置情報d4に基づいて求められる対象物上での三次元デジタイザ2の測定範囲に入る各部位のCADデータを、三次元形状処理装置100AからCADシステム8へ要求するなどして指定すればよい。
【0146】
抽出部7は、三次元デジタイザ2についての装置配置情報d4aに基づいて、CADデータd5の座標系に仮想的な三次元デジタイザ2を表す仮想三次元デジタイザ2iを想定するとともに、三次元デジタイザ2の測定パラメータd3に基づいて仮想三次元デジタイザ2iのカメラが備える撮像素子の各画素について、それぞれ仮想カメラ視線30を想定する。ここで、図16のn3は、仮想三次元デジタイザ2iの測定範囲を示す。
【0147】
仮想カメラ視線30が想定されると、抽出部7は、それぞれの仮想カメラ視線30について、CADデータd5との交点座標を求めることによって、CADデータd5から判定用形状データd1を生成する。
【0148】
なお、部品全体が細かく分割されて部位単位のCADデータの範囲が、三次元デジタイザ2の測定範囲より小さい、または同等の大きさである場合には、上述の仮想カメラ視線30を用いた抽出作業は不要であり、1以上の部位単位のCADデータは、そのまま判定用形状データd1として出力される。
【0149】
また、配置合わせ可否判定処理において、原参照形状データd7が配置合わせ可能ではないと判定された場合には、通常、原参照形状データd7に対応する判定用形状データd1を異なるものに変更して、配置合わせ可否判定処理をやり直す。
【0150】
ここで、CADデータd5から判定用形状データd1を生成する手法によれば、仮想三次元デジタイザ2iの装置配置情報を配置合わせ可能ではないと判定された原参照形状データd7を得た装置配置情報とは異なる装置配置情報に変更して新たに原参照形状データd7となるべき新たな判定用形状データd1を取得し直すことが容易になるとともに、判定用形状データd1の測定作業のために、三次元デジタイザ2を移動する時間や作業の手間を省くことができる。
【0151】
従って、例えば、この新たな判定用形状データd1の取得と、新たな判定用形状データd1に基づく配置合わせ可否判定処理とを、対象物についての形状データの取得を所望する部位の近傍において、配置合わせ可能であると判定される原参照形状データd7が得られるまで繰り返して行ったとしても、三次元デジタイザ2を用いて判定用形状データd1を得る場合に比べて所要時間を大幅に短縮することができる。
【0152】
また、例えば、あらかじめ複数の判定用形状データd1を得るための仮想三次元デジタイザ2iの装置配置情報d4を、測定パラメータd3、CADデータd5および対象物配置情報d20などに基づいて、対象物1についての形状検査に用いられる全体的な形状データを、測定漏れを生ずることがないように設定しておくとともに、上記の新たな判定用形状データd1をえるための装置配置情報d4のずらし量と方向とを予め設定しておけば、一度も三次元デジタイザ2による三次元測定を行うことなく、また、対象物1をも使用することなく、CADシステム8と三次元形状処理装置100Aのみによって、対象物1についての所望の全体的な形状データに対応する複数の判定用形状データd1を得ることができる。
【0153】
従って、得られた複数の判定用形状データd1に対応する仮想三次元デジタイザ2iの装置配置情報d4に基づいて、実際の対象物の形状検査工程における形状測定のための三次元デジタイザ2の装置配置情報d4を生成することができる。
【0154】
また、対象物1についての所望の全体的な形状データに対応する全ての判定用形状データd1が得られたか否かの判定においては、表示部5に表示された判定用形状データd1の配置結果などに基づいて測定者が目視によって判定してもよく、また、対象物1の全体を表すCADデータd5と、配置合わせされた判定用形状データd1とを、同一の座標系において重なるように座標変換し、対象物1の測定所望部分に対応する部分について、離散的に複数のチェック箇所を設け、各チェック箇所において所定の近傍内に配置合わせされた判定用形状データd1があるかないかを、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法における対応関係設定時のアルゴリズムを応用することして判定することによって、配置合わせ可否判定処理の作業の完了を自動的に検出してもよい。
【0155】
◎ズレ歪み付与部11:
図3に示されるズレ歪み付与部11は、三次元形状データ処理システム300Aが機能しているときに作動する機能部である。ズレ歪み付与部11は、形状データ取得部10Aから原参照形状データd7を供給されるとともに、制御処理部15から三次元デジタイザ2の測定精度d18およびマニピュレータ3aの配置決め精度d19を供給され、三次元形状の位置および姿勢を示す形状配置のズレ、ならびに三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが原参照形状データd7が表す三次元形状に付与された各三次元形状を、それぞれ表す1または複数のズレ歪み含有参照形状データd8を生成し、形状配置調整部12へと供給するとともに、ズレ歪み含有参照形状データd8の生成過程で形状配置の付与に用いられた形状配置ずらし変換M2を配置合わせ可否判定部13Aへと供給する。
【0156】
生成されるズレ歪み含有参照形状データd8の数が多いほど後述する形状配置調整部12において、多くの相互に異なった配置調整済み参照形状データd16を生成することができるので、個別形状データd2の測定に先立って数多くの配置合わせの試みを模擬することができ、配置合わせ可否判定処理の信頼性を高めることができる。
【0157】
ここで、配置合わせ可否判定処理の原理の概要において説明したように、三次元形状に付与される形状配置のズレおよび歪みについては、ズレおよび歪みが大きいほど、配置合わせ可否判定処理によって、配置合わせ可能であると判定された原参照形状データd7の判定に対する信頼性は高くなる。
【0158】
従って、システムの要求仕様などのために配置合わせ可能であるとの判定に対する信頼性をできるだけ高めたい場合などでは、例えば、安全係数をみこんで、個別形状データを取得する際に使用されるマニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18のそれぞれ数倍程度の配置のズレおよび歪みの少なくとも一方を、原参照形状データに付与するなどすることが望ましい。また、この場合、配置合わせ可否判定部13Aにおいて用いられる判定用閾値th1を、通常よりも配置合わせ可能であるとの判定がされにくい閾値とする変更を併用するなどしてもよい。
【0159】
また、例えば、配置合わせ可能であるとの判定が得られた判定に対する信頼性の向上と、配置合わせ可否判定処理の測定作業および処理のコストとのバランスをとることが、システムに要求されている場合には、例えば、マニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18とそれぞれ同程度の配置のズレおよび歪みを採用することが望ましい。
【0160】
この場合には、実際の三次元測定の状況により近い状況で配置合わせ可否判定処理の判定ができる。また、システムへの要求によっては、マニピュレータ3aの配置決め精度d19および三次元デジタイザ2の測定精度d18のよりも小さい配置のズレおよび歪みを採用してもよい。
【0161】
また、形状配置のズレは、実際に使用するマニピュレータ3aの配置決め精度d19に基づくことなく設定しても良い。例えば、一般的なマニピュレータの配置決め精度に基づいて適切な形状配置のズレを付与するなどしても、本発明の有用性を損なうものではない。
【0162】
同様に、三次元形状に付与される歪みについても三次元デジタイザ2の測定精度d18に基づくことなく適切な歪みを設定してもよい。
【0163】
また、例えば、多くの量産品の形状検査における事前のティーチング作業として配置合わせ可否判定処理を行う場合には、マニピュレータ3aの配置決め精度d19に加えて対象物配置情報d20と実際の対象物設置時との対象物の配置ズレの公差を更に加味して、配置のズレを設定するなどしてもよい。
【0164】
なお、三次元形状処理装置100A内のズレ歪み付与部11の他に、三次元デジタイザ2およびCADシステム8がそれぞれズレ歪み付与部として機能する場合があり、この場合には、生成されたズレ歪み含有参照形状データd8はそれぞれ不図示のデータ線を介して形状配置調整部12へと供給される。
【0165】
以下に、ズレ歪み付与部11の動作について、1つのズレ歪み含有参照形状データd8を生成する場合を例に図17〜図23を参照しつつ説明する。なお、複数のズレ歪み含有参照形状データd8を生成する場合には、1つのズレ歪み含有参照形状データd8を生成する場合と同様に生成すればよい。
【0166】
図17は、歪みの付与により生成されるズレ歪み含有参照形状データを例示する図である。なお、図17においては、三次元形状に付与される歪み量を、三次元形状の大きさに対して誇張して表示している。
【0167】
先ず、図17(a)においては、ズレ歪み付与部11が、円筒状の対象物についての原参照形状データd7iが表す三次元形状に対して歪みを付与することによって、ズレ歪み含有参照形状データd8iを生成している。
【0168】
具体的には、ズレ歪み付与部11は、原参照形状データd7iが表す形状の中央部を構成する形状データに対して、円筒の外部から内部へと変形する方向の歪みを発生させる形状歪み変換M1bを付与するとともに、原参照形状データd7iが表す形状の円筒の両端部を構成する形状データに対して、円筒の内部から外部へと変形する方向の歪みを発生させる形状歪み変換M1aおよびM1cを付与することによって、ズレ歪み含有参照形状データd8iを生成する。
【0169】
また、図17(b)においては、ズレ歪み付与部11が、凹凸を持つ対象物についての原参照形状データd7jが表す三次元形状に対して歪みを付与することによって、ズレ歪み含有参照形状データd8jを生成している。
【0170】
具体的には、ズレ歪み付与部11は、原参照形状データd7jが表す形状の中央部を構成する形状データに対して、局所的な歪みを発生させる形状歪み変換M1dを付与することによって、局所的な凸形状を表す形状データd8hjを有するズレ歪み含有参照形状データd8jを生成する。なお、図17(b)においては、原参照形状データd7jとズレ歪み含有参照形状データd8jとを便宜上僅かにずらして表示している。
【0171】
図17(a)における形状歪み変換M1a、M1bおよびM1cは、これらの変換が施される原参照形状データd7aの部位をそれぞれ構成する各三次元座標を変動させる変換として求めることができる。
【0172】
また、図17(b)における形状歪み変換M1dは、この変換が施される原参照形状データd7jの部位をそれぞれ構成する各三次元座標を変動させる変換として求めることができる。
【0173】
ここで、後述する形状配置のズレを付与する変換では、ズレを付与される形状データを構成する全ての各三次元座標に対して、同じアフィン変換が施されることによって、その形状データが表す三次元形状は保たれたまま、すなわち、歪みを生ずることなく、回転および平行移動することで形状配置のズレが付与されるが、例えば、図17(a)に例示される歪みの付与においては、形状歪み変換M1aおよびM1cと、形状歪み変換M1cとは形状データを構成する各三次元座標を変動させる方向が大きく異なっている。
【0174】
また各形状歪み変換がそれぞれ付与される部位毎に、全く同じ変換がその部位を構成する各三次元座標に対して与えられてもよいし、それら各三次元座標のそれぞれに対して多少異なる変換が付与されてもよい。
【0175】
図18および図19は、三次元形状データ処理システム300Aの三次元デジタイザ2がズレ歪み付与部11として機能して、原参照形状データd7aに対するズレ歪み含有参照形状データd8a’を三次元測定によって生成する様子を説明する図である。なお、三次元デジタイザ2をズレ歪み付与部11として機能させる場合のマニピュレータ3aの配置決め精度d19に求められる条件については、配置合わせ可否判定部13Aの説明において後述する。
【0176】
図18および図19に示されるように、三次元デジタイザ2は、装置配置情報d4bおよびd4b’に基づいて配置決めされており、測定範囲n2およびn2’によって対象物1を三次元測定している。
【0177】
図18に示される原参照形状データd7aは、装置配置情報d4bに基づいて配置された三次元デジタイザ2によって測定された形状データである。また、図19に示されるズレ歪み含有参照形状データd8a’は、装置配置情報d4b’に基づいて配置された三次元デジタイザ2によって測定された形状データである。
【0178】
このように三次元デジタイザ2をズレ歪み付与部11として機能させることによって、装置配置情報d4bに対する三次元デジタイザ2の配置のズレを設定し、この配置のズレに起因する形状配置のズレが原参照形状データd7aに付与されたズレ歪み含有参照形状データd8a’を取得することができる。
【0179】
三次元デジタイザ2をズレ歪み付与部11として機能させる場合は、多くのズレ歪み含有参照形状データd8a’を生成するためには、三次元デジタイザ2を多くの装置配置情報に基づいて実際に配置して形状データを測定する必要があるため、所要時間が長くなるが、最初の対象物に基づくティーチングの所要時間が長くなったとしても、以降の対象物の測定においてはティーチングの結果に基づいて短時間で三次元測定を行うことができるため、本発明の有用性を損なうものではない。
【0180】
次に、図19に示された三次元測定によって得られたズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データを演算によって生成する手法を説明する。
【0181】
図20は、図18および図19で説明した原参照形状データd7aとズレ歪み含有参照形状データd8a’との関係を説明する図である。ここでΔ1およびΔ2はそれぞれ、測定範囲n2およびn2’の相互のズレを示している。
【0182】
図20に示されるように、原参照形状データd7aとズレ歪み含有参照形状データd8a’とは、対象物1についての略同一の部分の三次元形状を表す形状データであり、その相違部分は、測定範囲のズレΔ1およびΔ2に対応した小さな領域である。既述したように、例えば、この相違部分が基準形状データd6と原参照形状データd7aとの略同一形状部分の中の一部分であるような場合には、ICP法などによる配置合わせにはほとんど影響を与えない。このため、原参照形状データd7aを座標変換することによって、ズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データを生成することが可能となる。
【0183】
図21は、図20に示された三次元デジタイザ2についての装置配置の変動を説明する図である。
【0184】
図21に示される座標系XYZおよびX’Y’Z’は、それぞれ装置配置情報d4bおよびd4b’に基づいて配置された三次元デジタイザ2が測定した形状データの各三次元座標を表す当初の座標系であるローカル座標系を表わしている。
【0185】
なお、本出願に係る図面においては、三次元デジタイザ2の装置配置情報に対応する箇所を示す印として各三次元デジタイザを示す図中に記載されている丸印が、各三次元デジタイザのローカル座標系の原点であり、ローカル座標系の向きと、各装置の位置および姿勢を示す装置配置情報の姿勢を表す座標系の向きとは一致しているものとする。
【0186】
従って、図21では、装置配置情報d4bの姿勢をZ軸まわりに角度θ1回転させた後、平行移動T1を付与することによって、装置配置情報d4b’が与えられる例が示されている。
【0187】
図22および図23は、配置ズレを付与されたズレ歪み含有参照形状データd8a(図23)を演算によって生成する様子を説明する図である。
【0188】
図22に示される原参照形状データd7aおよびズレ歪み含有参照形状データd8a’は、三次元デジタイザ2を用いた三次元測定によってそれぞれ取得された図20に示される原参照形状データd7aおよびズレ歪み含有参照形状データd8a’を装置配置情報d4bおよびd4b’の関係に基づいて1の座標系に座標変換して表示したものである。
【0189】
この座標変換は、三次元測定により得られたズレ歪み含有参照形状データd8a’を、装置配置情報d4b’についてのZ軸(図21のZ’軸)の周りに、角度−θ1回転させた後、−T1平行移動させることによって得ることができる。
【0190】
図23は、図22に示される原参照形状データd7aがズレ歪み含有参照形状データd8a’にできるだけ重なるように、原参照形状データd7aに対して形状配置ずらし変換M2を施すことによって生成されたズレ歪み含有参照形状データd8aを、図22に追加して表示した様子を表している。なお、図23の表示では、視認性を高めるためにズレ歪み含有参照形状データd8a’とズレ歪み含有参照形状データd8aとは便宜上僅かにずらして表示されている。
【0191】
ここでは、ズレ歪み含有参照形状データd8aを得る形状配置ずらし変換M2は、原参照形状データd7aを−T1平行移動した後、Z軸周りに角度−θ1回転させる変換として求められる。
【0192】
この例のように、形状配置ずらし変換M2は、(1)式または(2)式の形式で表現されるアフィン変換で表現される。
【0193】
【数1】
【0194】
ここで、原参照形状データd7aからのズレ歪み含有参照形状データd8aの生成においては、原参照形状データd7aの構成する全ての各三次元座標のそれぞれついて、同一のアフィン変換である形状配置ずらし変換M2を施すことによって生成することができる。
【0195】
このように、元の配置からZ軸周りに角度−θ1回転させた後、−T1平行移動させる配置のズレが与えられた三次元デジタイザ2によって、実際に三次元測定によって取得されるズレ歪み含有参照形状データd8a’に相当するズレ歪み含有参照形状データd8aは、元の配置にある三次元デジタイザ2によって測定されるべき原参照形状データd7aを−T1平行移動した後、Z軸周りに角度−θ1回転させる演算によって生成することができる。
【0196】
演算によってズレ歪み含有参照形状データを生成することにより、三次元測定によってズレ歪み含有参照形状データを生成する場合に比べて数多くのズレ歪み含有参照形状データを短時間で生成することができるので、ズレ歪み含有参照形状データの個数を増やすことが容易となり、後述する配置合わせ可能形状データであると判定された原参照形状データに対応する装置配置情報に基づいて実際に取得された個別形状データの配置合わせが成功する確率を高めることができる。
【0197】
以上に説明した図18〜図23に係る説明では、実測された原参照形状データd7aに基づく演算によりズレ歪み含有参照形状データを生成する手法と、実測によってズレ歪み含有参照形状データを生成する手法とを説明したが、図16を用いて説明したように、原参照形状データをCADデータから生成し、その原参照形状データを座標変換する演算によってズレ歪み含有参照形状データを生成してもよい。また、ズレ歪み含有参照形状データを原参照形状データに基づく座標変換ではなく、装置配置がずらされた複数の仮想三次元デジタイザを必要なズレ歪み含有参照形状データの個数に応じて想定し、CADデータに基づいてそれぞれの仮想三次元デジタイザに対応するズレ歪み含有参照形状データを生成しても良い。
【0198】
また、基準形状データ、原参照形状データおよびズレ歪み含有参照形状データに対応する判定用形状データの全てをCADデータに基づいて生成すれば、三次元デジタイザ2を一度も用いることなく、後述する配置合わせ可否判定処理を行って個別形状データを得るための装置配置情報を生成することができので、三次元測定作業を省くことができ作業コストを抑制することができる。
【0199】
また、複数のズレ歪み含有参照形状データのいくつかをCADデータから生成し、残りを実測もしくは、実測した基準形状データから生成してもよい。CADデータから生成されたズレ歪み含有参照形状データについては、その生成時間を短縮することができ、実測した原参照形状データに基づいて、または実測によってズレ歪み含有参照形状データを生成する場合には、反射率や粗さなどの対象物の表面状態が実際の三次元測定に与える影響を反映した状態で配置合わせの可否を判定できる。
【0200】
また、1つのズレ歪み含有参照形状データに対して、形状配置のズレと、形状の歪みとは、それぞれ単独で付与されても良いし、両方が付与されていてもよい。
【0201】
また、歪みを付与するタイミングは、全てのズレ歪み含有参照形状データに同一の歪みを付与する場合には、例えば、原参照形状データに先ず、歪みを付与してから、次に配置のズレを付与してズレ歪み含有参照形状データを生成してもよい。
【0202】
以上に説明したように、ズレ歪み付与部11は、形状データが表す三次元形状の位置および姿勢を示す形状配置のズレ、ならびに形状データが表す三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが、図3に示される原参照形状データd7が表す三次元形状である原参照三次元形状に付与された各三次元形状を、それぞれ表す1または複数のズレ歪み含有参照形状データd8を生成する。
【0203】
◎形状配置調整部12:
○三次元形状データ処理システム300A機能時の形状配置調整部12:
三次元形状データ処理システム300Aが機能しているときは、図3に示される形状配置調整部12は、形状データ取得部10Aから基準形状データd6および原参照形状データd7を、ズレ歪み付与部11からズレ歪み含有参照形状データd8を、制御処理部15から装置配置情報d4をそれぞれ供給されて、これらのデータに基づいて複数の配置調整済み参照形状データd16を生成して、基準形状データd6とともに表示部5への表示に供するなどするために記憶部14へと供給する。また、複数の配置調整済み参照形状データd16を生成する過程で得られた複数の形状配置合わせ変換M3を配置合わせ可否判定部13Aへと供給する処理を行う。
【0204】
また、既述したように、複数の配置調整済み参照形状データd16のうち、配置合わせ可能であると判定された原参照形状データd7に対応する形状データは、基準形状データd6とともに新たな配置合わせ可否判定処理における判定用形状データd1(通常は、基準形状データd6として使用される)として用いられる。
【0205】
以下に、形状配置調整部12の動作について、図24〜図28を参照しつつ説明する。なお、図24から図28においては、三次元形状間の配置ずれ量を、三次元形状の大きさに対して誇張して表示している。
【0206】
図24は、基準形状データd6a、原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bが1の座標系に変換された様子を説明する図である。ここでは、これらの各データは、基準形状データd6aおよび原参照形状データd7aにそれぞれ対応する装置配置情報d4に基づいて、形状配置調整部12によって、1の座標系に変換されている。
【0207】
ここで、基準形状データd6aと、原参照形状データd7aとのズレは、既述したようにマニピュレータ3aの配置決めの誤差などに起因するものである。また、ズレ歪み含有参照形状データd8aおよびd8bは、ズレ歪み付与部11において、原参照形状データd7aに対してそれぞれ異なる形状配置ずらし変換M2aおよびM2bが付与されたことによって生成されており、原参照形状データd7aと、ズレ歪み含有参照形状データd8aおよびd8bとのズレは、形状配置ずらし変換M2aおよびM2bによるものである。
【0208】
なお、ここでの形状配置ずらし変換M2aおよびM2bにおいては、それぞれ(1)式または(2)式における変換行列が異なったものとなる。
【0209】
また、不図示の形状歪み変換がさらに付与されることによってズレ歪み含有参照形状データd8aおよびd8bに形状の歪みがさらに付与されていてもよい。
【0210】
図25は、配置調整済み参照形状データd16a、d16b、およびd16c(図26)が生成される過程を例示する図である。図25では、図24に示された原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bが1の座標系において基準形状データd6aになるべく重なるように、形状配置調整部12が、原参照形状データd7a、ズレ歪み含有参照形状データd8aおよびd8bに対してそれぞれ形状配置合わせ変換M3a、M3bおよびM3cを施すことによって、配置の調整を試みる様子を示している。
【0211】
図26は、配置合わせが成功した配置調整済み参照形状データd16a、d16bおよびd16cを例示する図である。配置調整済み参照形状データd16a、d16bおよびd16cは、それぞれ図25に示される原参照形状データd7a、ズレ歪み含有参照形状データd8a、およびd8bがそれぞれ形状配置合わせ変換M3a、M3bおよびM3cによって、基準形状データd6aに適切に配置合わせされた形状データである。
【0212】
図27は、配置合わせが失敗した配置調整済み参照形状データd16d、d16eおよびd16fを例示する図である。
【0213】
図27では、基準形状データd6cおよび原参照形状データd7cが凹凸の少ない円筒状の三次元形状を有している。また、原参照形状データd7cに対して形状配置ずらし変換M2aおよびM2bがそれぞれ施されることによってズレ歪み含有参照形状データd8cおよびd8dが生成されている。
【0214】
原参照形状データd7cならびにズレ歪み含有参照形状データd8cおよびd8dに対して、図26に示された例と同様に、それぞれ形状配置合わせ変換M3a、M3bおよびM3cが施されることにより基準形状データd6aへの配置合わせが試みられた結果、配置調整済み参照形状データd16d、d16eおよびd16fがそれぞれ生成されているが、これらは基準形状データd6cに重なっていない。
【0215】
すなわち、ここでは、凹凸の少ない形状間の配置合わせが試みられたため、配置合わせが失敗している。
【0216】
形状配置合わせ変換M3a、M3bおよびM3cは、配置合わせの結果に関わらず、それぞれ形状配置合わせ変換M3(図3)として配置合わせ可否判定部13Aへと供給されて、配置合わせ可否判定処理に供せられる。また、配置調整済み参照形状データd16a、d16bおよびd16cも配置合わせの結果に関わらず、それぞれ配置調整済み参照形状データd16として基準形状データd6とともに記憶部14へと供給された後、表示部5に表示されて測定者の目視による配置合わせ可否の判定などに供せられる。
【0217】
上述したように、原参照形状データd7aを用いて複数の配置調整済み参照形状データd16を生成する場合には、ズレ歪み付与部11において、1以上のズレ歪み含有参照形状データd8を生成し、形状配置調整部12において、生成された1以上のズレ歪み含有参照形状データd8と原参照形状データd7とに対して基準形状データd6への配置合わせを試みればよい。
【0218】
次に、原参照形状データd7aに対して、形状配置合わせ変換M3aが適用されない場合、すなわち、原参照形状データd7aに対して、基準形状データd6aへの配置合わせが試みられない場合を説明する。
【0219】
図28は、原参照形状データd7aが用いられることなく配置調整済み参照形状データd16bおよびd16cが生成される過程を例示する図である。図28において、ズレ歪み含有参照形状データd8aおよびd8bは、原参照形状データd7aに対して、それぞれ形状配置ずらし変換M2aおよびM2bが付与されることによって生成された形状データであり、形状配置ずらし変換M2aおよびM2bに対して形状配置合わせ変換M3bおよびM3cがそれぞれ施されることによって配置調整済み参照形状データd16bおよびd16cが生成されている。
【0220】
このように、原参照形状データd7aを用いることなく複数の配置調整済み参照形状データd16を生成する場合には、ズレ歪み付与部11において、複数のズレ歪み含有参照形状データd8を生成し、形状配置調整部12において、生成された複数のズレ歪み含有参照形状データd8に対して基準形状データd6への配置合わせを試みればよい。
【0221】
以上に説明したように、形状配置調整部12は、図3に示される原参照形状データd7および、1または複数のズレ歪み含有参照形状データd8、あるいは、複数のズレ歪み含有参照形状データd8がそれぞれ表す各三次元形状についての略同一の三次元形状が、1の座標系において1以上の基準形状データd6が表す三次元形状になるべく重ね合わせられるように、原参照形状データd7と、1または複数のズレ歪み含有参照形状データd8とが表す各三次元形状についての複数の形状配置、あるいは複数のズレ歪み含有参照形状データd8が表す各三次元形状についての複数の形状配置のそれぞれを調整することによって、複数の配置調整済み参照形状データ16を生成する。
【0222】
○三次元形状測定システム500A機能時の形状配置調整部12:
三次元形状処理装置100Aが、三次元形状測定システム500Aの機能要素となる場合には、形状配置調整部12は、個別形状データd2に基づく基準形状データd6および原参照形状データd7の供給を形状データ取得部10Aから受けて、基準形状データd6と原参照形状データd7についての配置合わせを行って配置合わせ済み個別形状データd17を生成し、記憶部14へと供給する。
【0223】
◎配置合わせ可否判定部13A:
図3に示される配置合わせ可否判定部13Aは、三次元形状データ処理システム300Aが機能しているときに作動する機能部である。配置合わせ可否判定部13Aは、ズレ歪み付与部11および形状配置調整部12からそれぞれ形状配置ずらし変換M2および形状配置合わせ変換M3を表す変換行列を供給されて、これらの変換行列に基づいて、形状配置調整部12において生成された複数の配置調整済み参照形状データd16についての形状配置の相互関係を表す評価値を求め、この評価値を判定用閾値th1と比較することにより、原参照形状データd7が、形状データ取得部10Aから形状配置調整部12へと供給された1以上の基準形状データd6に配置合わせされることによって、基準形状データd6とともに対象物についての1の全体的な三次元形状を表すように形状配置を調整することができる配置合わせ可能形状データであるか否かを判定する配置合わせ可否判定処理を行う。なお、判定用閾値th1は、記憶部14に記憶されており、制御処理部15から配置合わせ可否判定部13Aへ供給される。
【0224】
また、原参照形状データd7が、配置合わせ可能形状データであるか否か、すなわち原参照形状データd7の配置合わせが適切にできるか否かを判定した判定結果d21は、制御処理部15へと供給されて、表示部5に表示される。
【0225】
判定結果d21が表示部5に表示されることによって、測定者は、表示部5に表示された配置調整済み参照形状データd16および基準形状データd6の表示状態を種々に変更しつつ目視による配置合わせの確認をする必要が無くなり、客観的な数値によって配置合わせの可否(成否)を判断できるので、目視による判定の誤りを防止することができるとともに、作業効率を向上させることができる。
【0226】
次に、図25に示された形状配置ずらし変換および形状配置合わせ変換を用いて、複数の配置調整済み参照形状データd16についての形状配置の相互関係を表す評価値を求める手法の例を説明する。
【0227】
図25に示される形状配置合わせ変換M3a、形状配置ずらし変換M2aおよび形状配置合わせ変換M3b、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cは、それぞれ、配置調整済み参照形状データd16a、d16bおよびd16c(図26)が、原参照形状データd7から生成される過程における、各配置調整済み参照形状データについての「形状配置の変動情報」を表わしている。
【0228】
ここで、形状配置合わせ変換M3a、ならび形状配置ずらし変換M2aおよび形状配置合わせ変換M3bの合成変換M3b*M2a、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cの合成変換M3c*M2bは、それぞれ、原参照形状データd7aについての形状配置を基準とした配置調整済み参照形状データd16a、d16b、およびd16cについての相対的な形状配置、すなわち、各配置調整済み参照形状データについての形状配置の相互関係を表わしている。
【0229】
なお、合成変換に使用されている記号*は、行列と行列の積を表わしており、記号*の左右の変換を(1)式で表わしたときの各変換を表す変換行列の積によって、合成変換を表す変換行列が求められている。
【0230】
図26に示されるように配置合わせが成功する場合は、任意の形状配置に対する配置調整済み参照形状データd16a、d16b、およびd16cのそれぞれの相対的な形状配置は略同一となるので、変換M3a、合成変換M3b*M2a、および合成変換M3c*M2b(それぞれ「相対的形状配置変換」と称する)をそれぞれ表す複数の変換行列は略同一の変換行列となる。
【0231】
しかし、図27に示されるように配置合わせが失敗した場合は、配置調整済み参照形状データd16a、d16b、およびd16cについての相対的形状配置変換をそれぞれ表す複数の変換行列は略同一の変換行列とはならない。
【0232】
従って、配置合わせ可否判定処理の原理の概要において説明したように、それぞれの相対的形状配置変換に基づいて、複数の配置調整済み参照形状データd16の基準形状データd6に対する配置合わせが成功しているか否か、すなわち、基準形状データd6と原参照形状データd7とが所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを判定することができるとともに、原参照形状データd7を得た三次元デジタイザ2の装置配置情報d4についても適切であったか否かを判定することもできる。
【0233】
なお、図28に示される例のように、形状配置調整部12において原参照形状データd7aが基準形状データd6aへの配置合わせを試みられなかった場合においても、図25に示される例と同様に、合成変換M3b*M2aおよび合成変換M3c*M2bとして与えられる相対的形状配置変換によって、原参照形状データd7aについての形状配置を基準とした配置調整済み参照形状データd16bおよびd16cについての相対的な形状配置を表すことができる。
【0234】
次に、相対的形状配置変換として表された、複数の配置調整済み参照形状データd16についての形状配置の相互関係を評価するための評価値を求め、複数の配置調整済み参照形状データd16の配置合わせが成功したか否かを判定する手法を説明する。
【0235】
具体的な判定手法としてはいくつかあるが、1つ目の判定手法の例として、例えば、相対的形状配置変換をそれぞれ表す各変換行列の各対応する成分同士の偏差を配置情報の相互関係を表す評価値として求めて判定用閾値th1と比較し、評価値が判定用閾値th1以下であれば配置合わせが成功したと判定し、そうでなければ、配置合わせが失敗したと判定する手法を採用し得る。
【0236】
また、2つ目の判定手法の例として、相対的形状配置変換をそれぞれ表す各変換行列の各対応する成分毎に最大値と最小値との差をそれぞれ配置情報の相互関係を表す評価値として求めて、判定用閾値th1と比較し、各評価値が判定用閾値th1以下であれば配置合わせが成功したと判定し、そうでなければ、配置合わせが失敗したと判定する手法を採用し得る。また、これらの手法の他に、1つ目と2つ目の判定手法を併用するなど各種の手法が採用され得る。
【0237】
また、変換行列のうち、回転を表す要素と、平行移動を表す要素とを(2)式のように分けて、それぞれ毎に配置情報の相互関係を表す評価値を求めてもよく、また、対象物の表面状態、大きさなどの対象物の状態や、測定距離、画角などの三次元デジタイザ2の状態に応じて評価値を求める手法を変更してもよい。
【0238】
また、判定用閾値th1としては、変換行列の要素毎に判定用閾値を設定しても良いし、例えば、変換行列のうち、回転を表す要素と、平行移動を表す要素とで、異なる判定用閾値th1を採用する手法、また、対象物に対する検査規格、対象物の表面状態および大きさなどの対象物の状態や、測定距離および画角などの三次元デジタイザ2の状態に応じて判定用閾値th1を適宜変更するなど、判定用閾値th1の設定については各種設定方法を取り得る。
【0239】
なお、上述の説明例では、基準形状データd6についての形状配置を基準とした配置調整済み参照形状データd16についての相対的な形状配置を例に説明したが、例えば、図25の例では、ズレ歪み含有参照形状データd8bについての形状配置を基準とすると、配置調整済み参照形状データd16a、d16b、およびd16cについての相対的な形状配置をそれぞれ表す相対的形状配置変換は、M3a*M2b-1、およびM3b*M2a*M2b-1、およびM3cとなる。なお、M2b-1は、M2bの逆変換を表す。
【0240】
これらの相対的形状配置変換は、原参照形状データd7aを基準とした各配置調整済み参照形状データの形状配置を与える相対的形状配置変換M2a、M3b*M2a、およびM3c*M2bのそれぞれに、ズレ歪み含有参照形状データd8bを基準とした原参照形状データd7aの形状配置を与える相対的形状配置変換M2b-1を合成した変換である。
【0241】
このように、配置調整済み参照形状データd16a、d16bおよびd16cが原参照形状データd7から生成される過程における、各配置調整済み参照形状データについてのそれぞれの形状配置の変動情報である、形状配置合わせ変換M3a、形状配置ずらし変換M2aおよび形状配置合わせ変換M3b、ならびに形状配置ずらし変換M2bおよび形状配置合わせ変換M3cのそれぞれを用いることによって、形状配置、装置配置、その他の座標空間における任意の配置を基準とする各配置調整済み参照形状データについての相対的な形状配置を与える相対的形状配置変換を表すことができる。また、座標間の関係が既知であれば、配置調整済み参照形状データが存在している座標系とは異なる座標系における配置を基準とすることもできる。
【0242】
また、座標空間における任意の配置を基準とする各配置調整済み参照形状データの形状配置間の相互関係は、原参照形状データd7aを基準とする各配置調整済み参照形状データの形状配置の相互関係と等しくなる。
【0243】
以上に説明したように、配置合わせ可否判定部13Aは、原参照形状データd7が、1以上の基準形状データd6と原参照形状データd7とが対象物1についての1の全体的な三次元形状を表すように、原参照形状データd7についての形状配置を調整することができる配置合わせ可能形状データであるか否かを、原参照形状データd7からそれぞれ生成された複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係に基づいて判定する判定処理を行う。
【0244】
該相互関係に基づいて原参照形状データd7についての配置合わせの可否を判定する手法を採用すれば、対象物上の測定範囲に含まれる三次元形状を表現する原参照形状データd7に基づいて生成された1以上の歪み含有参照マーカ位置データd14および基準形状データd6、あるいは、複数の歪み含有参照マーカ位置データd14である複数の第3形状データが、原参照形状データd7の測定範囲と重なる測定範囲の三次元形状を表現した基準形状データd6に対して配置合わせされた後の複数の配置調整済み参照形状データd16についての形状配置の相互関係に基づいて、基準形状データd6と原参照形状データd7とが配置合わせによって所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定する。
【0245】
従って、基準形状データd6と原参照形状データd7との相互関係によっては、基準形状データd6と原参照形状データd7とが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0246】
また、配置合わせ可否判定部13Aは、この相互関係を、例えば、複数の配置調整済み参照形状データd16のそれぞれが原参照形状データd7から生成される過程における各配置調整済み参照形状データd16についての形状配置の変動情報に基づいて求める手法を採用し得る。なお、各配置調整済み参照形状データd16についての形状配置の変動情報については、ICP法を用いた逐次の演算の過程において、最終的な配置の各配置調整済み参照形状データd16を求める前に、この形状配置の変動情報が求められる。言い換えれば、最終的な配置の各配置調整済み参照形状データd16を求めなくても、この形状配置の変動情報を求めることができ、配置合わせの可否を判定することができる。
【0247】
形状配置の変動情報に基づいて相互関係を求める手法を採用すれば、生成された複数の配置調整済み参照形状データd16がそれぞれ表す三次元形状間の形状配置を解析するなどして該相互関係を求める必要が無く、配置調整済み参照形状データd16が生成される過程における形状配置の変動情報に基づいて該相互関係を求めることができるので、原参照形状データd7の形状に関わらず、正確な相互関係を求めることができ、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0248】
なお、生成された複数の配置調整済み参照形状データd16自体を解析することによって、各配置調整済み参照形状データd16についての形状配置の相互関係を求める手法としては、例えば、同一直線上にない3点以上の局所的な凹凸などの特徴部が原参照形状データd7にある場合には、該3点以上の特徴点にそれぞれ対応する複数の配置調整済み参照形状データd16についての3点以上の特徴点によって定められる形状間の相互関係に基づいて、複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係を求める手法などを採用し得る。
【0249】
この場合には、各配置調整済み参照形状データd16についての形状配置の変動情報を保存していない場合であっても、各配置調整済み参照形状データd16についての形状配置の相互関係を求めることができる。
【0250】
また、該3点以上の特徴点は、基準形状データd6と原参照形状データd7とについての測定範囲の重複部分に限られず、原参照形状データd7の全体において探索することができる。
【0251】
ここで、三次元デジタイザ2をズレ歪み付与部11として機能させる場合のマニピュレータ3aの配置決め精度に求められる条件について説明する。三次元デジタイザ2をズレ歪み付与部11として機能させる場合には、三次元デジタイザ2を配置決めする装置配置情報d4に基づいて形状配置ずらし変換M2を求める必要があるため、マニピュレータ3aの配置決め精度が悪ければ、求めた形状配置ずらし変換M2に実際の値との誤差を生じてしまうため判定結果10が誤ったものとなるおそれがある。
【0252】
従って、三次元デジタイザ2をズレ歪み付与部11として機能させる場合には、マニピュレータ3aの配置決め精度にのみに基づいて異なる複数の形状配置ずらし変換を模擬的に生成し、これらの形状配置ずらし変換から、生成される配置調整済み参照形状データd16についての相互関係の評価値を求めたときに、この評価値が判定用閾値th1よりも、例えば1/3以下程度に小さい必要がある。
【0253】
多くの場合では、この条件が満たされるため三次元デジタイザ2をズレ歪み付与部11として機能させることができる。また、ティーチング時の三次元測定では、量産品の形状検査時の三次元測定で実際に用いられるマニピュレータよりも配置決め精度が高いマニピュレータを用いれば、この条件は容易に満たされ得ることからも三次元デジタイザ2をズレ歪み付与部11として機能させることができる。
【0254】
上述した判定方法においては、各配置調整済み参照形状データd16の形状配置の相互関係に着目して配置合わせの可否を判定したが、各配置調整済み参照形状データd16に対応する各装置配置情報d4に着目することによって配置合わせの可否を判定してもよい。
【0255】
具体的には、例えば、各配置調整済み参照形状データd16に対応する各装置配置情報、すなわち、各配置調整済み参照形状データd16についての形状配置の変動情報に基づいて推定される各ズレ歪み含有参照形状データd8についての各装置配置情報を求め、求められた各装置配置情報のばらつきが、所定の範囲に入るか否かを判定することによって原参照形状データd7についての配置合わせの可否を判定してもよい。
【0256】
また、推定された各ズレ歪み含有参照形状データd8についての各装置配置情報のそれぞれと、各ズレ歪み含有参照形状データd8を生成した際に設定された各装置配置情報のそれぞれとの差異が、所定の範囲に入るか否かを判定することによって原参照形状データd7についての配置合わせの可否を判定してもよい。
【0257】
[実施形態1に係る装置およびシステムの動作フロー:]
次に、図29から図31に示されるフローチャートを用いて三次元形状測定システム500A、三次元形状データ処理システム300Aおよび三次元形状処理装置100Aの動作フローを説明する。
【0258】
図29は、三次元形状測定システム500Aによって行われる、対象物1の全体的な三次元形状を表す形状データを生成する手順ステップS1の概要を例示するフローチャートである。
【0259】
三次元形状測定システム500Aは、先ず三次元形状データ処理システム300Aとして機能することにより、対象物1についての全体的な形状データとして配置合わせされる複数の個別形状データd2を三次元測定するために三次元デジタイザ2を配置する複数の第2の装置配置情報を生成する処理を行う(ステップS110)。
【0260】
図30は、三次元形状データ処理システム300Aによって行われる、ステップS110に記載された複数の第2の装置配置情報を生成する処理についての概要を例示するフローチャートである。
【0261】
先ず、三次元形状データ処理システム300Aは、判定用形状データを生成するためのマニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報を取得する(ステップS210)。この複数の第1の装置配置情報は、マニピュレータ3aの台座部に対する対象物の位置および姿勢を示す対象物配置情報d20に基づいて、対象物1に対して、三次元デジタイザ2を所望の相対的な配置に配置決めできるように測定者が操作部4のマウスやキーボードを用いて入力することなどによって設定される。
【0262】
次に、三次元形状データ処理システム300Aは、複数の第1の装置配置情報(装置配置情報d4)に基づいて配置された三次元デジタイザ2を用いて対象物1を三次元測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の判定用形状データd1を生成する(ステップS220)。
【0263】
ここでの判定用形状データd1の生成は、最初に配置合わせされる判定用形状データd1の生成であるので、通常、装置配置情報d4に基づいて配置された三次元デジタイザ2が三次元測定して得た対象物1の形状データまたはCADシステム8が出力するCADデータd5に基づいて生成される。
【0264】
生成された複数の判定用形状データd1は、三次元形状処理装置100Aの形状データ取得部10Aに供給され、三次元形状処理装置100Aによって配置合わせ可否判定処理が行われる(ステップS230)。
【0265】
図31は、三次元形状処理装置100Aによって行われる、配置合わせ可否判定処理(ステップS230)についての概要を例示するフローチャートである。
【0266】
形状データ取得部10Aは、供給された複数の判定用形状データd1から1以上の判定用形状データd1を配置合わせの基準となる基準形状データd6として取得するとともに、これらの基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状を表す形状データを有する他の判定用形状データd1を原参照形状データd7として取得する(ステップS310)。
【0267】
形状データ取得部10Aに取得された原参照形状データd7は、ズレ歪み付与部11に供給されて、三次元形状についての形状配置のズレおよび三次元形状の歪みの少なくとも一方である、1または相互に異なる複数のズレ歪みが付与されることによって、1以上のズレ歪み含有参照形状データd8が生成される。また、形状配置のズレを付与するためにそれぞれ使用された形状配置ずらし変換M2は、配置合わせ可否判定部13Aへと供給される(ステップS320)。
【0268】
ズレ歪み付与部11によって生成された1以上のズレ歪み含有参照形状データd8は、形状配置調整部12へと供給されるとともに、形状データ取得部10Aからは1以上の基準形状データd6および原参照形状データd7が形状配置調整部12へ供給される。
【0269】
形状配置調整部12は、原参照形状データd7および1以上のズレ歪み含有参照形状データd8、または複数のズレ歪み含有参照形状データd8が、1の座標系において1以上の基準形状データd6になるべく重ね合わせられるように、原参照形状データd7と、1以上のズレ歪み含有参照形状データd8とが表す各三次元形状についての複数の形状配置を調整することによって、または、複数のズレ歪み含有参照形状データd8が表す各三次元形状についての複数の形状配置のそれぞれを調整することによって、複数の配置調整済み参照形状データd16を生成する。
【0270】
また、配置調整に使用された形状配置合わせ変換M3を配置合わせ可否判定部13Aへと供給し、基準形状データd6および複数の配置調整済み参照形状データd16を記憶部14へ供給する(ステップS330)。
【0271】
配置合わせ可否判定部13Aへ供給された形状配置ずらし変換M2と形状配置合わせ変換M3は、配置合わせ可否判定部13Aによって、複数の配置調整済み参照形状データd16がそれぞれ表す複数の三次元形状についての形状配置の相互関係を表す評価値へと変換される(ステップS340)。
【0272】
配置合わせ可否判定部13Aは、この評価値と、制御処理部15から供給される判定用閾値th1とを比較する(ステップS350)。
【0273】
比較の結果、評価値が判定用閾値th1以下であれば、複数の配置調整済み参照形状データd16の配置合わせが成功した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データであると判定されて、この判定結果d21は制御処理部15へと供給され(ステップS360)、処理はステップS230(図30)へと戻される。
【0274】
比較の結果、評価値が判定用閾値th1よりも大きければ、複数の配置調整済み参照形状データd16の配置合わせが失敗した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データではないと判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS370)、処理はステップS230へと戻される。
【0275】
ステップS230へ戻された処理は、ステップS240へ移され、制御処理部15は、配置合わせ可否判定部13Aから供給された判定結果d21を確認し、原参照形状データd7が配置合わせ可能形状データであるか否かを調べる。
【0276】
次に、判定結果d21が、原参照形状データd7を配置合わせ可能形状データであると判定するものである場合には、制御処理部15は、配置合わせされた1以上の基準形状データd6、および原参照形状データd7からなる判定用形状データd1に対応する第1の装置配置情報(装置配置情報d4)を第2の装置配置情報として記憶部14に記憶し(ステップS260)、処理はステップS270へ移される。
【0277】
また、判定結果d21が、原参照形状データd7を配置合わせ可能形状データではないと判定するものである場合には、制御処理部15が、この原参照形状データd7に対応する第1の装置配置情報を所定量ずらした装置配置情報を、新たな第1の装置配置情報として生成し、この新たな第1の装置配置情報に対応する判定用形状データが生成されるように、マニピュレータ3aおよび3bの配置決め動作ならびに三次元デジタイザ2の三次元測定動作の制御、または、CADシステム8および抽出部7の動作の制御を行うことによって、新たな原参照形状データd7となるべき判定用形状データd1が生成され(ステップS250)、処理は再びステップS230へと移される。
【0278】
ステップS270では、適切に配置合わせされた各判定用形状データd1によって、形状検査の対象部位などの対象物1についての着目部分の三次元形状が漏れなく表されているか否かを、測定者が配置合わせされた各判定用形状データd1についての画像を表示部5で確認することなどにより、または、制御処理部15が、部品全体のCADデータと配置合わせされた各判定用形状データd1とを比較することなどにより、それぞれ確認する。
【0279】
各判定用形状データd1によって、対象物1についての着目部分の三次元形状が漏れなく表されておらず測定漏れがある場合には、他の第1の装置配置情報に対応する判定用形状データが生成されるように、制御処理部15がマニピュレータおよび三次元デジタイザ2、ならびにCADシステム8などを制御することによって、次回の配置合わせ可否判定処理において、通常、原参照形状データd7となるべき新たな判定用形状データが生成される。
【0280】
また、配置合わせ済みの判定用形状データd1の中から次回の配置合わせ可否判定処理において、1以上の基準形状データd6となるべき判定用形状データが生成され(ステップS280)、処理はステップS230へと移されて配置合わせ可否判定処理が繰り返される。
【0281】
また、各判定用形状データd1によって、対象物1についての着目部分の三次元形状が漏れなく表されている場合は、処理はステップS110(図29)へ戻される。なお、処理がステップS110へと戻されるときには、対象物1についての着目部分の三次元形状を漏れなく測定可能な三次元デジタイザ2についての装置配置情報(複数の第2の装置配置情報)が生成されている。
【0282】
ステップS110へ戻された処理は、ステップS120へと移され、三次元形状測定システム500Aは、ステップS110において生成された複数の第2の装置配置情報のそれぞれに基づいて三次元デジタイザ2を配置し、複数の個別形状データd2を測定する(ステップS130)。
【0283】
測定された複数の個別形状データd2は、三次元形状処理装置100Aの形状データ取得部10Aへと供給され、配置合わせの基準となる基準形状データd6または配置合わせされる原参照形状データd7として取得されて、形状配置調整部12へと供給され、形状配置調整部12において基準形状データd6と原参照形状データd7との配置合わせが行われて複数の配置合わせ済み個別形状データd17が生成されて記憶部14へと供給され、表示部5での表示などに用いられる。
【0284】
以上の処理によって、三次元形状測定システム500Aは、対象物1の全体的な三次元形状を表す形状データを生成する。
【0285】
<実施形態2について:>
[三次元形状測定システム500Bおよび三次元形状データ処理システム300B:]
図32は、実施形態1の変形例である実施形態2に係る三次元形状測定システム500Bおよび三次元形状データ処理システム300Bの構成例を示すブロック図である。
【0286】
図32に示される三次元形状処理装置100B、三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8は、三次元形状測定システム500Bおよび三次元形状データ処理システム300Bの主要部をなしており、三次元形状測定システム500Bとして機能する場合と、三次元形状データ処理システム300Bとして機能する場合とがある。
【0287】
三次元形状データ処理システム300Bは、マニピュレータ3aの台座部に対する三次元デジタイザ2の位置および姿勢を示す複数の第1の装置配置情報に基づいて配置された三次元デジタイザ2が、マーカが貼付された対象物1bを測定範囲が重複するように複数の方向から測定したとすれば得られるべき複数の形状データと略同一の三次元形状をそれぞれ表す複数の判定用形状データを生成するとともに、それらの判定用形状データが貼付されたマーカに基づいて適正に配置合わせ可能なものであるか否かを配置合わせ可否判定処理(後述)によって判定し、配置合わせ可能であると判定された各判定用形状データにそれぞれ対応する第1の装置配置情報を複数の第2の装置配置情報として生成する。
【0288】
三次元形状測定システム500Bは、あらかじめ三次元形状データ処理システム300Bとして機能することによって複数の第2の装置配置情報を生成した後、生成された複数の第2の装置配置情報に基づいて、マーカが貼付された対象物1bと三次元デジタイザ2とを相対的に配置し、対象物1bの三次元形状を複数の方向から測定して得られる複数の個別形状データにマーカに基づく配置合わせを適用して対象物1bの全体的な三次元形状を表す形状データを生成する。
【0289】
本実施形態においては、三次元形状測定システム500Bと三次元形状データ処理システム300Bとは、同一の構成要素により構成されているが、三次元形状測定システムおよび三次元形状データ処理システムは、例えば、それぞれ同一性能の三次元デジタイザならびにマニピュレータおよびその制御装置などを備えた別個の構成要素により構成されてもよいし、例えば、三次元形状データ処理システム300Bのマニピュレータおよびその制御装置については、三次元形状測定システム500Bのものよりも配置決め精度が高いものを採用してもよい。
【0290】
なお、同一形状の数多くの部品の形状検査などのために、三次元形状データ処理システム300Bは、三次元形状データ処理システム300Aと同様のティーチングを行う。
【0291】
三次元形状測定システム500Bおよび三次元形状データ処理システム300Bを構成する主要部のうち三次元デジタイザ2、マニピュレータ3a、マニピュレータ制御部3bおよびCADシステム8については、三次元形状処理装置100Aに替えて三次元形状処理装置100Bに接続されていることを除いて、それぞれが対応する、三次元形状測定システム500Aを構成する主要各部と同一の構成および動作をするので説明を省略する。
【0292】
また、三次元デジタイザ2およびCADシステム8については、三次元デジタイザ2およびCADシステム8がそれぞれ行う三次元測定およびCADデータの保持の対象となる対象物はマーカが貼付された対象物1bであることが、三次元形状測定システム500Aおよび三次元形状データ処理システム300Aにおける三次元デジタイザ2およびCADシステム8とは異なる。
【0293】
また、マーカが貼付された対象物1bについてのCADデータd5(図33)の生成については、例えば、大量生産における量産部品等の形状検査時に、各部品におけるマーカの貼付位置を予め指定する場合などに、マーカが貼付された状態の部品等の対象物1bのCADデータd5を生成することが可能である。
【0294】
[実施形態2に係る配置合わせ可否判定処理の原理の概要:]
次に、三次元形状処理装置100Bの説明に先立って、実施形態2に係る配置合わせ可否判定処理の原理の概要を、三次元形状測定システム500Bの動作の概要と合わせて説明する。
【0295】
○三次元形状測定システム500Bの動作の概要:
図34は、三次元形状測定システム500Bが、マーカが貼付された直方体状の対象物1bの三次元形状を複数の方向から測定するときの測定範囲の設定例を説明する図である。図34では、装置配置情報d4cおよびd4dに基づいて配置決めされた三次元デジタイザ2が異なる複数の方向から、f1からf5の5個のマーカが貼付された対象物1bの平面部位1sを三次元測定している。また、図34に示された異なる三次元デジタイザ2aおよび2bのように複数の三次元デジタイザを組合わせて三次元測定してもよい。
【0296】
ここで、測定範囲n3およびn4は、それぞれ装置配置情報d4cおよび装置配置情報d4dに対応する三次元デジタイザ2の測定範囲を示しており、測定範囲n3およびn4にそれぞれ対応する三次元形状を表す形状データd2cおよびd2dは、複数の個別形状データd2(図33)として、三次元形状処理装置100Bに供給される。測定範囲n3およびn4は対象物1b上で重複する部分を有しており、その重複部分には、マーカf1、f2およびf3が貼付されている。
【0297】
測定範囲n3およびn4にそれぞれ対応する個別形状データd2cおよびd2dは、三次元形状処理装置100Bによって、測定範囲n3およびn4の重複部分に貼付されたマーカに基づく配置合わせ方法を用いて配置合わせされる。このように、マーカに基づく配置合わせ方法を用いる場合には、配置合わせされる形状データを取得するための測定範囲の重複部分に、同一直線上にない3以上のマーカが存在するように、測定範囲を設定する必要がある。なお、本発明において、単に「3以上のマーカ」というときは、「同一直線上にない3以上のマーカ」を意味している。
【0298】
マーカとしては、白色等の三次元デジタイザ2が測定可能な色彩が施された円形シールや、白色等の円形シールの上に所定幅の黒色のリングが描かれたものなどが採用される。
【0299】
貼付されたマーカは、三次元測定時に測定される二次元画像および三次元形状データなどに基づいて、マーカ毎にマーカの位置を代表的に表すマーカ上の点の三次元座標が求められる。ここで、マーカの位置を代表的に表すマーカ上の点の三次元座標は、本発明において「三次元位置」と称する。
【0300】
マーカに基づく配置合わせにおいては、測定範囲の重複部分に存在する3以上のマーカについて、各マーカの中心など、各マーカの位置を代表的に表すマーカ上の点を「識別点」として採用し、識別点の三次元座標である三次元位置の対応関係に基づいて、各測定範囲に対応する形状データの配置合わせが行われる。
【0301】
マーカに基づく配置合わせ方法を採用することによって、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせ方法を適用しても正しく配置合わせがなされないような、例えば平面同士などの配置合わせを適切に行うことができる。
【0302】
また、識別点としては、マーカの中心点などの他に、球状または半球状の部材を磁力や粘着力などによって対象物に取り付けて、三次元測定によって得られる該部材の形状データに該部材の既知の形状データをフィッティングするなどして求めた該部材の中心座標を採用してもよい。
【0303】
このように識別点を与える部材としては、平面状のものに限られず立体形状のものでもよく、また、該部材の対象物への取り付け方法は、粘着力、磁力その他の各種手法を採用し得る。
【0304】
図35は、図34に示される測定範囲n3およびn4にそれぞれ対応して取得された個別形状データd2cおよびd2dを説明する図である。
【0305】
個別形状データd2cにおける形状データd2cf1、d2cf2、d2cf3およびd2cf4は、それぞれ測定範囲n3にあるマーカf1、f2、f3およびf4の三次元形状を表し、個別形状データd2dにおける形状データd2df1、d2df2、d2df3およびd2df5は、それぞれ測定範囲n4にあるマーカf1、f2、f3およびf5の三次元形状を表している。
【0306】
個別形状データd2cおよびd2dは三次元形状処理装置100Bに供給されて配置合わせされるが、その際に、形状データ取得部10B(図33)によって、例えば、個別形状データd2cは基準形状データd6として、個別形状データd2dは原参照形状データd7としてそれぞれ取得される。
【0307】
取得された基準形状データd6および原参照形状データd7は、マーカ位置データ取得部16(図33)およびマーカ配置調整部19(図33)へと供給される。
【0308】
ここで、本出願においては、1以上のマーカの三次元位置によって構成されるデータを「マーカ位置データ」と称し、マーカ位置データが表す三次元形状、すなわち、マーカ位置データを構成するマーカの三次元位置が表す三次元形状を「マーカ位置形状」と称する。
【0309】
マーカ位置データ取得部16は、供給された基準形状データd6および原参照形状データd7のそれぞれについて、それぞれに含まれる全てのマーカの三次元位置b1からb4およびb5からb8を求める。
【0310】
次に、各形状データにおける各マーカの三次元位置b1からb4およびb5からb8の中から、複数のマーカについてのマーカ位置形状の、各形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置b1からb3およびb5からb7をそれぞれ探索する。
【0311】
次に、探索されたマーカの三次元位置b1からb3およびb5からb7を、それぞれ、基準形状データd6および原参照形状データd7についての測定範囲n3およびn4が重複する部分に貼付された3以上のマーカf1、f2およびf3から成るマーカ群についての三次元位置である基準マーカ位置データd11(図33、図35)および原参照マーカ位置データd12(図33、図35)として生成し、対応関係取得部17(図33)およびマーカ配置調整部19(図33)へと供給する。
【0312】
なお、本出願の図面では、マーカの三次元位置をその三次元座標によって定まる図面中の点として表す。
【0313】
対応関係取得部17は、取得された基準マーカ位置データd11および原参照マーカ位置データd12間の対応関係であるマーカデータ対応関係d13(図33)を生成し、マーカ配置調整部19へと供給する。
【0314】
図35の例においては、マーカデータ対応関係d13は、マーカデータ対応関係d13aとして与えられる。具体的には、マーカデータ対応関係d13aは、原参照形状データd7についての原参照マーカ位置データd12における各マーカの三次元位置b5、b6およびb7をそれぞれ基準形状データd6についての基準マーカ位置データd11における各マーカの三次元位置b1、b2およびb3に対応させる対応関係として与えられる。
【0315】
マーカ配置調整部19は、基準マーカ位置データd11における各マーカの三次元位置b1からb3のそれぞれと原参照マーカ位置データd12における各マーカの三次元位置b5からb7のそれぞれとが、マーカデータ対応関係d13(d13a)の対応関係に従って、できるだけ一致するような座標変換情報を求め、この座標変換情報によって基準形状データd6と原参照形状データd7との配置合わせを行う。
【0316】
本出願の図面では、マーカ位置データは、その表すマーカ位置形状によって表されており、図35においては、基準マーカ位置データd11および原参照マーカ位置データd12は、それぞれ基準マーカ位置形状c1および原参照マーカ位置形状c2によって表されている。
【0317】
なお、ここでの基準マーカ位置形状c1および原参照マーカ位置形状c2は、三次元デジタイザ2の測定誤差の影響は受けるものの、同じマーカf1、f2およびf3に対するマーカ位置形状であるので略合同となる。
【0318】
図36は、個別形状データd2cおよびd2dが、図35に示されるマーカデータ対応関係d13aに基づいて適切に配置合わせされた様子を説明する図である。
【0319】
図36では、マーカデータ対応関係d13aに基づいて、原参照形状データd7として取得された個別形状データd2dにおける各マーカf1、f2およびf3それぞれについての形状データd2df1、d2df2およびd2df3が、それぞれ、基準形状データd6として取得された個別形状データd2cにおける各マーカf1、f2およびf3についての形状データd2cf1、d2cf2およびd2cf3にできるだけ重なって一致するような座標変換が、マーカ配置調整部19によって求められる。
【0320】
すなわち、マーカf1、f2およびf3についての個別形状データd2dおよびd2cのそれぞれにおけるマーカの三次元位置b1からb3がマーカデータ対応関係d13aに基づいてそれぞれb5からb7にできるだけ一致するような座標変換が、マーカ配置調整部19によって求められ、この座標変換を用いて個別形状データd2dが個別形状データd2cへと配置合わせされている。
【0321】
以上に説明したように、重複した測定範囲n3およびn4のそれぞれについての個別形状データd2cおよびd2dは、測定範囲n3およびn4の重複部分における3以上のマーカf1からf3に基づいて三次元形状処理装置100Bにおいて配置合わせされる。
【0322】
○マーカに基づく配置合わせの誤りの類型:
次に、図37から図40は、マーカ位置形状に起因する配置合わせの誤りを説明する図である。
【0323】
図37では、図37における測定範囲n2に替えて測定範囲n5が設定されており、個別形状データd2eが測定範囲n5に対応している。測定範囲n1およびn5の重複部分には、マーカf1、f3およびf6が貼付されている。また、個別形状データd2aおよびd2eにおけるマーカf1、f3およびf6についてのマーカ位置データv4aおよびv4eは、それぞれマーカ位置形状c4を表わしている。
【0324】
図38(a)は、図37に示される測定範囲n1およびn2の重複部分に存在するマーカf2、f3およびf4についての、マーカ位置データv1aおよびv1bがそれぞれ表すマーカ位置形状c1の特徴を示している。ここで、図38には、説明を簡単にするために座標軸XYZが設けられている。なお、他の図面においても適宜座標軸が設けられている。
【0325】
また、図38(b)は、図37に示される測定範囲n1およびn5の重複部分に存在するマーカf1、f3およびf6についての、マーカ位置データv4aおよびv4eがそれぞれ表すマーカ位置形状c4の特徴を示している。
【0326】
図38(a)に示されるように、マーカf3と、マーカf2およびf4とのX軸方向の距離は、長さL1である。また、図38(b)に示されるように、マーカf3と、マーカf1およびf6とのX軸方向の距離は、長さL2である。ここで、L1はL2の数倍程度の長さである。
【0327】
図39(a)は、図37および図37に示される個別形状データd2aにおけるマーカf3の形状データd2af3近傍の形状データが表す三次元形状を示している。また、図39(b)は、図39(a)に示された三次元形状を、図39(a)における切断面線A−Aで切断した三次元形状を示している。
【0328】
図39(b)に示されるように、個別形状データd2aにおけるマーカf3の形状データd2af3が表す三次元形状は周辺部の形状よりも、+Y方向へ長さL3飛び出している。
【0329】
図39(c)は、図37および図37にそれぞれ示される個別形状データd2bおよびd2eのそれぞれにおけるマーカf3についての形状データd2bf3およびd2ef3近傍の形状データが表す三次元形状を示している。また、図39(d)は、図39(c)に示された三次元形状を、図39(c)における切断面線B−Bで切断した三次元形状を示している。
【0330】
図39(d)に示されるように、個別形状データd2bおよびd2eにおけるマーカf3の形状データd2bf3およびd2ef3がそれぞれ表す三次元形状は周辺部の形状と同一平面上にある。
【0331】
なお、図37における個別形状データd2aおよびd2bのそれぞれにおけるマーカf2およびf4についての形状データd2af2およびd2af4、ならびにd2bf2およびd2bf4がそれぞれ表す三次元形状もまた、それぞれ周辺部の形状と同一平面上にある。
【0332】
同様に、図37における個別形状データd2aおよびd2eのそれぞれにおけるマーカf1およびf6の形状データd2af1およびd2af6ならびにd2ef1およびd2ef6がそれぞれ表す三次元形状もまた、それぞれ周辺部の形状と同一平面上にある。
【0333】
図40(a)は、図37の個別形状データd2aおよびd2bが、マーカf2、f3およびf4に基づいて配置合わせされた三次元形状が図39の切断線A−Aで切断された形状を示している。
【0334】
また、図40(b)は、図37に示された個別形状データd2aおよびd2eが、マーカf1、f3およびf6に基づいて配置合わせされた三次元形状が図39の切断線A−Aで切断された形状を示している。
【0335】
図40(a)では、個別形状データd2aにおけるマーカf2、f3およびf4についての形状データd2af2、d2af3およびd2af4は、個別形状データd2bにおけるマーカf2、f3およびf4についての形状データd2bf2、d2bf3およびd2bf4とそれぞれ合わせられており、図39(b)に示された形状データd2af3が表す三次元形状と、その周辺の形状データが表す三次元形状とのY軸方向の差異である長さL3のために、個別形状データd2aおよびd2bがそれぞれ表す三次元形状には、角度θ1のズレが生じている。
【0336】
また、図40(b)では、個別形状データd2aにおけるマーカf1、f3およびf6についての形状データd2af1、d2af3およびd2af6は、個別形状データd2eにおけるマーカf1、f3およびf6についての形状データd2ef1、d2ef3およびd22f6とそれぞれ合わせられており、図39(b)に示された形状データd2af3が表す三次元形状と、その周辺の形状データが表す三次元形状とのY軸方向の差異である長さL3のために、個別形状データd2aおよびd2eがそれぞれ表す三次元形状には、角度θ2のズレが生じている。
【0337】
ここで、角度θ2は、角度θ1の数倍程度大きくなっている。これは、図38(a)および図38(b)にそれぞれ示された長さL1およびL2の差に起因して生じている。
【0338】
このように、マーカの三次元位置の検出誤差が同程度であっても、配置合わせに使用される3以上のマーカについてのマーカ位置形状の差異によっては、配置合わせ後の各形状データについてのズレは、大きく異なってくる。
【0339】
ICP法などを用いる配置合わせにおいては、1以上の基準形状データと原参照形状データにおける測定範囲の重複部分に対応するそれぞれの形状が許容限度を超えて異なっている場合には、配置合わせのズレが生ずるおそれがある。
【0340】
同様に、マーカに基づいた配置合わせにおいても、1以上の基準形状データと原参照形状データにおける測定範囲の重複部分にそれぞれ存在するマーカ位置形状が、許容限度を超えて異なっている場合には、上述の例のように、正しいマーカデータ対応関係間が取得されていたとしても、配置合わせのズレが行生ずるおそれがあり、マーカに基づく配置合わせにおいては、この誤差は、配置合わせに用いられるマーカ間の位置関係によって、さらに増幅される場合がある。
【0341】
ここで、これらの配置合わせの誤りを、本出願においてはマーカ位置形状に起因した配置合わせの誤りであると表現する。
【0342】
なお、形状データ間の配置合わせにおいては、マーカ位置形状に起因した配置合わせの誤りも、形状検査の規格などのシステムの要求によっては許容されない。したがって、これらの誤りを正しく判定することが求められる。
【0343】
○実施形態2における配置合わせ可否判定処理の原理の概要:
次に、マーカに基づく配置合わせによって、形状データ間の配置合わせを行う場合の配置合わせ可否判定処理の原理の概要を、ICP法に基づく配置合わせとの差異と合わせて説明する。
【0344】
ICP法を用いる配置合わせにおいては、既述したように、基準形状データと原参照形状データとを近づける座標変換を求める演算毎に、各形状データにおける略同一形状部分間の対応関係を動的に求め、この対応関係に基づいて求められる座標変換を各形状データ間に施すことを繰り返し行うため、基準形状データと原参照形状データとの当初の配置関係が異なると、各形状データについての略同一形状部分間の対応関係も変動する。
【0345】
従って、特に、各形状データの表す三次元形状の凹凸の少ない場合には、最終的な配置合わせ結果も各データ間の当初の配置関係によって異なる場合がある。
【0346】
このため、ICP法に基づく配置合わせにおける配置合わせ可否判定処理においては、三次元形状の位置および姿勢を示す形状配置のズレ、および三次元形状の歪みの少なくとも一方であるズレ歪みを、原参照形状データd7(図3)が表す三次元形状に対して付与することなどによってズレ歪み含有参照形状データd8(図3)を生成し、生成されたズレ歪み含有参照形状データd8などに対して基準形状データd6への配置合わせを試みる。
【0347】
次に、この配置合わせによって生成された複数の配置調整済み参照形状データd16(図3)についての形状配置の相互関係に基づいて複数の配置調整済み参照形状データd16と基準形状データd6との配置合わせが成功したか否かを判定し、配置合わせが成功した複数の配置調整済み参照形状データd16についての原参照形状データd7を配置合わせが可能であると判定する。
【0348】
これに対して、マーカに基づく配置合わせにおいては、既述したように、先ず、基準形状データd6(図33)と参照形状データd7(図33)における各マーカの三次元位置の中から、複数のマーカについてのマーカ位置形状の、各形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置をそれぞれ探索する。
【0349】
次に、探索されたそれぞれの3以上のマーカの三次元位置を基準形状データd6および原参照形状データd7のそれぞれについての測定範囲が重複する部分に貼付された3以上のマーカから成るマーカ群についての三次元位置である基準マーカ位置データd11(図33)および原参照マーカ位置データd12(図33)として生成するとともに、基準マーカ位置データd11における各マーカの三次元位置を、それぞれ原参照マーカ位置データd12における各マーカの三次元位置に対応させるマーカデータ対応関係d13(図33)を生成する。
【0350】
次に、このマーカデータ対応関係d13に基づいて、基準形状データd6および原参照形状データd7のそれぞれについて各マーカの三次元位置ができるだけ一致する座標変換を求め、この座標変換を適用することによって基準形状データと原参照形状データとの配置合わせを行う。
【0351】
従って、マーカデータ対応関係d13は、基準形状データd6と原参照形状データd7との当初の配置関係の影響をほとんど受けることなく生成され、基準形状データd6と原参照形状データd7との配置合わせも、基準形状データd6と原参照形状データd7との当初の配置関係の影響を受けることなく行われる。
【0352】
このため、マーカに基づく配置合わせにおける配置合わせ可否判定処理においては、原参照形状データd7から生成された原参照マーカ位置データd12が表すマーカ位置形状に対して、三次元形状の歪みを付与することによって歪み含有参照マーカ位置データd14(図33)が生成され、生成された歪み含有参照マーカ位置データd14などに対して基準形状データd6から生成される基準マーカ位置データd11への配置合わせが試みられる。
【0353】
この配置合わせによって生成される複数の配置調整済みマーカ位置データの相互関係に基づいて複数の配置調整済みマーカ位置データと基準マーカ位置データd11との配置合わせが成功したか否かが判定され、配置合わせが成功した複数の配置調整済みマーカ位置データについての原参照形状データd7が、配置合わせが可能であると判定される。
【0354】
上述したように原参照マーカ位置データd12に与える形状配置のズレは、配置調整済みマーカ位置データの原参照形状データd7に対する配置には影響を与えないので、本発明においては、原参照マーカ位置データd12に対して歪みのみを付与してもよいし、歪みと共に形状配置のズレを付与してもよい。
【0355】
なお、基準マーカ位置データd11と複数の配置調整済みマーカ位置データのそれぞれとの相互関係ではなく、複数の配置調整済みマーカ位置データについての相互関係が採用される理由については、ICP法、スピンイメージ法などの形状対応点に基づく配置合わせにおける配置合わせ可否判定処理において、基準形状データd6と複数の配置調整済み参照形状データd16のそれぞれとの相互関係ではなく、複数の配置調整済み参照形状データd16についての相互関係が用いられる理由と同様の理由によるものである。
【0356】
つまり、基準マーカ位置データd11と複数の配置調整済みマーカ位置データとが表現するマーカ位置形状が完全に合同でない限り、基準マーカ位置データd11と複数の配置調整済みマーカ位置データのそれぞれとの相互関係によっては、複数の配置調整済みマーカ位置データと基準マーカ位置データd11との配置合わせが成功したか否かを判定できないからである。
【0357】
なお、マーカに基づく配置合わせの配置合わせ可否判定処理における判定方法の詳細については、三次元形状処理装置100Bの説明において後述する。
【0358】
[三次元形状処理装置100B:]
図33は、変形例に係る三次元形状データ処理装置100Bの各機能部の構成を例示するブロック図である。図33には、各機能部とともに、各機能部間で授受される主な情報が記載されている。また、制御信号などについての記載は省略されている。
【0359】
図33に示されるように、三次元形状処理装置100Bは、操作部4、表示部5、入出力部6、抽出部7、形状データ取得部10B、マーカ位置データ取得部16、対応関係取得部17、マーカ歪み付与部18、マーカ配置調整部19、配置合わせ可否判定部13B、記憶部14および制御処理部15を主に備えて構成される。
【0360】
三次元形状処理装置100Bは、三次元形状データ処理システム300Bの構成要素として機能する際には、供給される複数の判定用形状データd1が適正に配置合わせ可能なものであるか否かを判定する配置合わせ可否判定処理を行って、配置合わせ可能であると判定された判定用形状データd1に対応する装置配置情報を、三次元形状測定システム500Bが複数の個別形状データを測定するときの装置配置情報である第2の装置配置情報として求める処理などを行う。
【0361】
また、三次元形状処理装置100Bが、三次元形状測定システム500Bの構成要素として機能する際には、三次元デジタイザ2から供給される複数の個別形状データd2を、マーカに基づく配置合わせ方法を用いて配置合わせし、対象物1bについての全体的な三次元形状を表す形状データを生成する処理などを行う。
【0362】
図33に示される操作部4、表示部5、入出力部6、抽出部7、記憶部14および制御処理部15については、図3において同一の符号を付された機能要素と同一であるので説明を省略する。
【0363】
なお、抽出部7、形状データ取得部10B、マーカ位置データ取得部16、対応関係取得部17、マーカ歪み付与部18、マーカ配置調整部19、配置合わせ可否判定部13Bおよび制御処理部15は、CPUで所定の制御プログラムを実行することで実現しても良いし、専用のハードウェア回路を用いて実現しても良い。
【0364】
◎形状データ取得部10B:
○三次元形状データ処理システム300B機能時の形状データ取得部10B:
三次元形状データ処理システム300Bが機能しているときは、形状データ取得部10Bには、三次元デジタイザ2、抽出部7、および制御処理部15から、それぞれ三次元測定された対象物1bの形状データ、CADシステム8から供給される対象物1bについてのCADデータd5、および記憶部14に記憶されている原参照形状データd7に対応した配置調整済み参照形状データd16および基準形状データd6に基づいた複数の判定用形状データd1であって、1以上の判定用形状データと、それらの表す三次元形状の一部または全部と略同一の三次元形状であるとともに、対象物1bに貼付された複数のマーカのうち3以上のマーカ群の三次元形状が含まれる三次元形状を表す形状データをそれぞれ有する1以上の他の判定用形状データとを含んだ複数の判定用形状データd1が適宜供給される。
【0365】
形状データ取得部10Bは、供給された複数の判定用形状データd1から1以上の基準形状データd6と原参照形状データd7を取得して、それらをマーカ位置データ取得部16およびマーカ配置調整部19へ供給する。
【0366】
複数の判定用形状データの配置合わせ時に測定漏れ部分を確認するという観点からは、判定用形状データは、三次元デジタイザ2によって測定されるべき形状データとできるだけ同一の形状を有することが望ましい。
【0367】
しかしながら、マーカに基づく配置合わせにおいては、基準形状データd6および原参照形状データd7にそれぞれ含まれる、対象物1b上の3以上のマーカからなる同一のマーカ群についての形状データに基づいて配置合わせがされるので、三次元デジタイザ2によって測定されるべき形状データと、その形状データに対応する判定用形状データとが、同じマーカについての形状データを含んでいる限り、これらの形状データがそれぞれ表す三次元形状が相互に多少異なっていたとしても本発明の有用性を損なうことはない。
【0368】
図41および図42は、マーカが貼付された対象物1bについての基準形状データおよび原参照形状データの生成例を説明する図である。
【0369】
図41は、三次元デジタイザ2が判定用形状データd1cおよびd1d(図42)を生成するための三次元測定を行う様子を示している。対象物1b上に3個のマーカf1、f2およびf3が貼付されており、これらのマーカは、異なる装置配置情報に基づいて配置された三次元デジタイザ2についての2つの測定範囲n3およびn4が重複している部分に貼付されている。
【0370】
図42は、図41に示される測定範囲n3およびn4にそれぞれ対応して取得された判定用形状データd1cおよびd1dが、それぞれ基準形状データd6bおよび原参照形状データd7bとして取得される様子を示している。
【0371】
ここでは、判定用形状データd1cには、マーカf1、f2およびf3の三次元形状を表す形状データd1cf1、d1cf2およびd1cf3が含まれており、判定用形状データd1dには、マーカf1、f2およびf3の三次元形状を表す形状データd1df1、d1df2およびd1df3が含まれている。
【0372】
三次元デジタイザ2から形状データ取得部10Bに供給された判定用形状データd1cおよびd1dは、形状データ取得部10Bによってそれぞれ基準形状データd6bおよび原参照形状データd7bとして取得されている。また、これらの基準形状データd6bおよび原参照形状データd7bは、マーカ位置データ取得部16およびマーカ配置調整部19へと供給される。
【0373】
なお、図41および図42では、2つの判定用形状データから基準形状データおよび原参照形状データが1つずつ生成されているが、実施形態2に係る基準形状データおよび原参照形状データも、図14および図15を用いて説明した実施形態1に係る基準形状データおよび原参照形状データと同様の種々の態様を取り得る。ただし、既述したように、1以上の基準形状データと原参照形状データとの略同一の形状部分には、3以上のマーカからなる同一のマーカ群についての形状データが含まれている必要がある。
【0374】
なお、3以上のマーカについての形状データが、既に適切に配置合わせされている複数の基準形状データd6に渡って存在しているとともに、これから配置合わせされるべき原参照形状データd7にも存在していてもよい。
【0375】
また、実施形態2における基準形状データd6および原参照形状データd7となるべき複数の判定用形状データd1の供給方法などについても、実施形態1と同様である。
【0376】
以上に説明したように、図33に示される形状データ取得部10Bは、複数のマーカが貼付された対象物1bについての複数の三次元形状をそれぞれ表す複数の判定用形状データd1のうち、1以上の判定用形状データd1を基準形状データd6として取得するとともに、それら1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状であって、対象物1bに貼付された複数のマーカのうち3以上のマーカから成るマーカ群の三次元形状が含まれる三次元形状を表す形状データを含んでいる他の判定用形状データを原参照形状データd7として取得する。
【0377】
○三次元形状測定システム500B機能時の形状データ取得部10B:
三次元形状測定システム500Bが機能するときの形状データ取得部10Bは、判定用形状データd1に替えて個別形状データd2を供給されることを除き、三次元形状データ処理システム300B機能時の形状データ取得部10Bと同じ動作をする。
【0378】
◎マーカ位置データ取得部16:
○三次元形状データ処理システム300B機能時のマーカ位置データ取得部16:
図33に示されるマーカ位置データ取得部16は、三次元形状データ処理システム300Bが機能するときは、供給された1以上の基準形状データd6および原参照形状データd7のそれぞれについて、略同一の形状部分に存在する3以上のマーカについての形状データなどを抽出して、それらのマーカの三次元位置をそれぞれ示す1以上の基準マーカ位置データd11および原参照マーカ位置データd12を生成して、対応関係取得部17およびマーカ配置調整部19へと供給するとともに、原参照マーカ位置データd12については、マーカ歪み付与部18へも供給する。
【0379】
図43は、マーカ位置データ取得部16および対応関係取得部17の動作例を説明する図である。
【0380】
図43に示される基準形状データd6bおよび原参照形状データd7bは、それぞれ、図42に示される基準形状データd6bおよび原参照形状データd7bである。
【0381】
マーカ位置データ取得部16は、基準形状データd6bおよび原参照形状データd7bなどを処理することによって、図41に示されるマーカf1、f2およびf3にそれぞれ対応する三次元位置を、基準形状データd6bについては、b1、b2およびb3として、また、原参照形状データd7bについては、b4、b5およびb6として求める。
【0382】
求められたマーカの三次元位置b1、b2およびb3は、基準マーカ位置データv5を構成し、マーカの三次元位置b4、b5およびb6は、原参照マーカ位置データv6を構成する。なお、基準マーカ位置データv5および原参照マーカ位置データv6は、それぞれ図33における基準マーカ位置データd11および原参照マーカ位置データd12に相当する。
【0383】
具体的には、先ず、三次元測定時に得られた二次元画像からエッジ抽出処理などの画像処理によって、各マーカf1、f2およびf3、ならびに図41における測定範囲n3およびn4の重複部分と異なる測定範囲に含まれる不図示の他のマーカの画像を抽出し、この画像から各マーカの中心に対応する画素位置をそれぞれ求める。
【0384】
次に、求められた各画素位置に対応する三次元座標を基準形状データd6および原参照形状データd7などの形状データから求めることなどによって各マーカf1、f2およびf3ならびに不図示の他のマーカを含む全てのマーカについての三次元位置を、基準形状データd6bおよび原参照形状データd7bに対して求める。
【0385】
次に、基準形状データd6bおよび原参照形状データd7bにおける求められた全てのマーカの三次元位置の中から、複数のマーカについてのマーカ位置形状の、基準形状データd6bおよび原参照形状データd7b間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置を探索する。
【0386】
なお、三次元デジタイザ2が取得した形状データにおいては、取得された形状データに対する三次元デジタイザ2の存在方向が判別可能であるため、通常、この探索では三次元デジタイザ2側のみから観察されるマーカ位置形状間に基づいた合同関係の探索が行われる。このため、表裏の誤認識に起因する誤った探索が防止される。
【0387】
図43の例では、基準形状データd6bにおけるマーカの三次元位置b1、b2およびb3により定められるマーカ位置形状c5と、原参照形状データd7bにおけるマーカの三次元位置b4、b5およびb6により定められるマーカ位置形状c6とが略合同である。
【0388】
したがって、基準形状データd6bおよび原参照形状データd7bのそれぞれについてマーカの三次元位置b1、b2およびb3、ならびにb4、b5およびb6が探索される。
【0389】
次に、探索されたマーカの三次元位置b1、b2およびb3、ならびにb4、b5およびb6を、基準形状データd6bおよび原参照形状データd7bのそれぞれについての測定範囲n3およびn4が重複する部分に貼付された3以上のマーカf1、f2およびf3から成るマーカ群についての三次元位置である基準マーカ位置データv5および原参照マーカ位置データv6として生成する。
【0390】
また、マーカの三次元位置の生成について、CADデータなどにおいては、通常、各マーカ部分は予め、独立した各部位として登録されているため、二次元画像を用いることなくマーカの三次元位置を求めることができる。
【0391】
生成された、基準マーカ位置データv5および原参照マーカ位置データv6は、それぞれ図33における基準マーカ位置データd11および原参照マーカ位置データd12として対応関係取得部17およびマーカ配置調整部19へ供給される。
【0392】
以上に説明したように、マーカ位置データ取得部16は、1以上の基準形状データd6および原参照形状データd7について、これらの形状データについての測定範囲の対象物1b上での重複部分に存在するマーカ群の各三次元位置をそれぞれ示す1以上の基準マーカ位置データd11および原参照マーカ位置データd12を求める。
【0393】
○三次元形状測定システム500B機能時のマーカ位置データ取得部16:
三次元形状測定システム500Bが機能しているときのマーカ位置データ取得部16は、三次元形状データ処理システム300B機能時と同じ動作によって生成した基準マーカ位置データd11および原参照マーカ位置データd12を対応関係取得部17へ供給する。
【0394】
◎対応関係取得部17:
図33に示される対応関係取得部17は、三次元形状データ処理システム300Bの機能時および三次元形状測定システム500Bの機能時に、同じ動作を行う。対応関係取得部17は、マーカ位置データ取得部16から供給された1以上の基準マーカ位置データd11および原参照マーカ位置データd12間の対応関係であるマーカデータ対応関係d13を生成し、マーカ配置調整部19へと供給する。
【0395】
図43の例においては、マーカデータ対応関係d13bがマーカデータ対応関係d13に相当する。マーカデータ対応関係d13bは、具体的には、原参照形状データd7bについての原参照マーカ位置データv6における各マーカの三次元位置b4、b5およびb6をそれぞれ基準形状データd6bについての基準マーカ位置データv5における各マーカの三次元位置b1、b2およびb3に対応させる対応関係として与えられる。
【0396】
なお、マーカデータ対応関係d13bは、例えば、合同なマーカ位置形状c5とマーカ位置形状c6の各頂点の対応関係などから求めることができる。
【0397】
したがって、図33においては、マーカ位置データ取得部16と対応関係取得部17とは、異なる機能部であるが、同一の機能部によってマーカ位置データ取得部16および対応関係取得部17を実現してもよい。
【0398】
◎マーカ歪み付与部18:
図33に示されるマーカ歪み付与部18は、三次元形状データ処理システム300Aが機能しているときに作動する機能部であり、実施形態1に係るズレ歪み付与部11に対応する機能部である。
【0399】
マーカ歪み付与部18は、マーカ位置データ取得部16から原参照マーカ位置データd12を、制御処理部15から三次元デジタイザ2の測定精度d18を供給されて、マーカ位置データ取得部16が表す三次元形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成し、マーカ配置調整部19へ供給する。
【0400】
なお、実施形態2に係る配置合わせ可否判定処理の原理の概要の説明において、説明したようにマーカ歪み付与部18は、実施形態1に係る形状配置調整部12とは異なり、原参照マーカ位置形状に形状の歪みを必ず付与する。つまり、形状配置のズレは、配置合わせ可否判定処理の判定結果に影響を及ぼさないので付与しても付与しなくてもよいが、少なくとも形状の歪みは必ず付与する。
【0401】
図44は、歪み含有参照マーカ位置データv7およびv8の生成例を説明する図である。なお、図44においては、マーカ位置形状の歪み量を、マーカ位置形状の大きさに対して誇張して表示している。
【0402】
図44において、マーカの三次元位置b4、b5およびb6によって定められる原参照マーカ位置形状c6を表す原参照マーカ位置データv6は、マーカ位置データ取得部16からマーカ歪み付与部18に供給されている。
【0403】
マーカ歪み付与部18は、マーカの三次元位置b4に形状歪み変換M1dを付与してマーカの三次元位置b7を生成することによって、マーカの三次元位置b5、b6およびb7によって定められる歪み含有参照マーカ位置形状c7を表す歪み含有参照マーカ位置データv7を生成するともに、マーカの三次元位置b6に形状歪み変換M1eを付与してマーカの三次元位置b8を生成することによってマーカの三次元位置b4、b5およびb8によって定められる歪み含有参照マーカ位置形状c8を表す歪み含有参照マーカ位置データv8を生成している。
【0404】
ここで、歪み含有参照マーカ位置データv7およびv8がそれぞれ表す歪み含有参照マーカ位置形状c7およびc8は、原参照マーカ位置データv6が表す原参照マーカ位置形状c6に歪みが付与されたマーカ位置形状である。
【0405】
形状歪み変換M1dおよびM1eは、実施形態1に係るズレ歪み付与部11が、原参照形状データd7に対して付与する形状歪み変換と同種の変換である。
【0406】
図44の例では、原参照マーカ位置データv6を構成する3つのマーカの三次元位置のうち1つの三次元位置のみに形状歪み変換が付与されて歪み含有参照マーカ位置データが生成されているが、例えば、原参照マーカ位置データv6を構成する3つのマーカの三次元位置をそれぞれ異なる方向に移動させるなど、原参照マーカ位置形状c6に対して少なくとも形状の歪みを発生させる変換であればどのような変換であってもよい。
【0407】
また、与えられる形状歪み変換は、実施形態1に係るズレ歪み付与部11が付与する形状歪み変換と同じく、三次元デジタイザ2の測定精度d18に基づいて設定されても良いし、測定精度d18に基づくことなく適切な歪み変換を設定しても良い。
【0408】
また、ズレ歪み付与部11と同様に、マーカ歪み付与部18は、または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を生成する。なお、1つだけの歪み含有参照マーカ位置形状を生成する場合には、マーカ配置調整部19における配置調整において、必ず原参照マーカ位置データd12も配置調整の対象とされることによって、複数の配置調整済みマーカ位置データが生成される。
【0409】
以上に説明したように、マーカ歪み付与部18は、原参照マーカ位置データd12を構成する各三次元位置の少なくとも1つが変更されることによって、原参照マーカ位置データd12が表す三次元形状である原参照マーカ位置形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成する。
【0410】
◎マーカ配置調整部19:
図33に示されるマーカ配置調整部19は、実施形態1に係る形状配置調整部12に対応する機能部である。
【0411】
○三次元形状データ処理システム300B機能時のマーカ配置調整部19:
三次元形状データ処理システム300B機能時のマーカ配置調整部19は、形状データ取得部10Bから1以上の基準形状データd6および原参照形状データd7を、マーカ位置データ取得部16から1以上の基準マーカ位置データd11および原参照マーカ位置データd12を、対応関係取得部17からマーカデータ対応関係d13を、マーカ歪み付与部18から1または複数の歪み含有参照マーカ位置データd14を、制御処理部15から三次元デジタイザ2についての装置配置情報d4を、それぞれ供給される。
【0412】
これらの各種データの供給を受けたマーカ配置調整部19は、原参照マーカ位置データd12および、1または複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データd11についてのマーカの三次元位置とが、マーカデータ対応関係d13に従って1の座標系においてそれぞれなるべく一致するように、原参照マーカ位置データd12が表す原参照マーカ位置形状と、1または複数の歪み含有参照マーカ位置データd14がそれぞれ表す1または複数の歪み含有参照マーカ位置形状とのそれぞれについての位置および姿勢を示す複数の形状配置を調整することによって複数の配置調整済みマーカ位置データを生成する動作を行う。
【0413】
マーカ配置調整部19は、また、複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データd11についての各マーカの三次元位置とが、マーカデータ対応関係d13に従って1の座標系においてそれぞれなるべく一致するように、複数の歪み含有参照マーカ位置データd14がそれぞれ表す複数の歪み含有参照マーカ位置形状についての複数の形状配置を調整することによって、複数の配置調整済みマーカ位置データを生成する動作を行う。
【0414】
マーカ配置調整部19は、上述した複数の配置調整済みマーカ位置データの生成の際に用いられた複数の形状配置合わせ変換M3を配置合わせ可否判定部13Bへと供給するとともに、複数の形状配置合わせ変換M3をそれぞれ、装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に適用することによって得られる複数の配置調整済み参照形状データd16と、基準形状データd6とを目視による配置合わせの確認などに供するために記憶部14へと供給する。
【0415】
図45および図46を用いて、以下に、マーカ配置調整部19の動作を説明する。なお、図45および図46においては、マーカ位置形状の歪み量およびマーカ位置形状間の配置ずれ量を、マーカ位置形状の大きさに対して誇張して表示している。
【0416】
図45は、マーカ配置調整部19が、配置合わせが成功した配置調整済みマーカ位置データを生成する過程を説明する図であり、図46は、マーカ配置調整部19が、配置合わせが失敗した配置調整済みマーカ位置データを生成する過程を説明する図である。
【0417】
図45には、基準マーカ位置形状c5および原参照マーカ位置形状c6をそれぞれ表す基準マーカ位置データv5および原参照マーカ位置データv6が、それぞれに対応する三次元デジタイザ2の装置配置情報d4に基づいて、マーカ配置調整部19によって1の座標系に変換されている。
【0418】
ここでの基準マーカ位置データv5と原参照マーカ位置データv6とのズレは、マニピュレータ3aの配置決め誤差などに起因するものである。
【0419】
また、歪み含有参照マーカ位置形状c7およびc8によってそれぞれ表されている歪み含有参照マーカ位置データv7およびv8は、マーカ歪み付与部18において原参照マーカ位置データv6から生成されたものである。
【0420】
原参照マーカ位置データv6と、歪み含有参照マーカ位置データv7およびv8とのずれは、マーカ歪み付与部18において原参照マーカ位置データv6に与えられた形状歪み変換に起因するものである。
【0421】
また、原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8についての各マーカの三次元位置が、マーカデータ対応関係d13に基づいて、1の座標系において原参照マーカ位置データv6についての各マーカの三次元位置にそれぞれなるべく一致するように、原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8に対してそれぞれ形状配置合わせ変換M3d、M3eおよびM3fを施すことによって、配置の調整が試みられる。
【0422】
この結果、それぞれ配置調整済みマーカ位置形状c6’、c7’およびc8’を表す配置調整済みマーカ位置データv6’、v7’およびv8’が生成されて、基準マーカ位置データv5に対して適切に配置合わせが成されている。
【0423】
ここでそれぞれの形状配置合わせ変換M3d、M3eおよびM3fは、配置合わせされる原参照マーカ位置データv6ならびに歪み含有参照マーカ位置データv7およびv8の各頂点すなわち各マーカの三次元位置を、マーカデータ対応関係d13に従って基準マーカ位置データv5についての各マーカの三次元位置にアフィン変換によってそれぞれ対応させる連立方程式を作成し、最小二乗法を用いて、(1)式または(2)式で表されるアフィン変換の変換行列を求めることなどによって生成される。従って、配置調整済み参照形状データd16を生成する前に、これらのアフィン変換は生成される。
【0424】
図46では、図45の例と全く同様にして配置合わせがされたが、歪み含有参照マーカ位置データv8の配置合わせが、失敗した例を示している。このような配置合わせの失敗は、例えば、原参照マーカ位置データv6についてのマーカ位置形状が、歪み付与の影響を受けやすい形状をしている場合などに、三次元空間的に発生する。
【0425】
形状配置合わせ変換M3d、M3eおよびM3fは、配置合わせの結果に関わらず、それぞれ形状配置合わせ変換M3(図33)として配置合わせ可否判定部13Bへと供給されて、配置合わせ可否判定処理に供せられる。
【0426】
また、基準形状データd6と原参照形状データd7とにそれぞれ対応する装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に対して、形状配置合わせ変換M3d、M3eおよびM3fを適用することによって得られる複数の配置調整済み参照形状データd16と、基準形状データd6とが、表示画像の目視による配置合わせの確認などのために記憶部14へと供給される。
【0427】
なお、実施形態2においては、基準マーカ位置データd11と原参照マーカ位置データd12との対応関係として求められた1つのマーカデータ対応関係d13を原参照マーカ位置データv6および各歪み含有参照マーカ位置データv7の全てに適用して複数の配置調整済みマーカ位置データをそれぞれ生成する配置合わせが行われているが、別法も採用し得る。
【0428】
この別法としては、例えば、各歪み含有参照マーカ位置データv7が生成された後に、基準形状データd6に含まれる全てのマーカを対象として各歪み含有参照マーカ位置データv7のそれぞれと最も合同関係に近いマーカ位置形状を表す各マーカ位置データを新たに探索するとともに、歪み含有参照マーカ位置データと新たに探索されたマーカ位置データとの組合わせ毎にマーカデータ対応関係をそれぞれ取得し、これらのマーカデータ対応関係に基づいて各歪み含有参照マーカ位置データv7を、対応するマーカ位置形状へ配置合わせすることによって複数の配置調整済みマーカ位置データを生成する手法を採用し得る。
【0429】
この別法によれば、測定誤差などに起因したマーカ位置形状の歪みによって発生する誤った配置合わせを、1つのマーカデータ対応関係d13に基づいて配置合わせを試みる場合よりも、広範な範囲にわたって模擬することができる。
【0430】
尚、該別法における新たなマーカ位置データの探索については、基準形状データd6だけでなく過去に配置合わせ可能であると判定された原参照形状データd7をも対象として行ってもよい。
【0431】
○三次元形状測定システム500B機能時のマーカ配置調整部19:
三次元形状測定システム500B機能時のマーカ配置調整部19は、形状データ取得部10Bから複数の個別形状データに基づいた1以上の基準形状データd6および原参照形状データd7を、マーカ位置データ取得部16から1以上の基準マーカ位置データd11および原参照マーカ位置データd12を、対応関係取得部17からマーカデータ対応関係d13を、制御処理部15から三次元デジタイザ2についての装置配置情報d4を、それぞれ供給される。
【0432】
マーカ配置調整部19は、三次元形状データ処理システム300Bの機能時と同様に、マーカ位置データ取得部16で求められるマーカデータ対応関係d13に従って、原参照マーカ位置データd12についての各マーカの三次元位置を基準マーカ位置データd11についての各マーカの三次元位置にそれぞれ、できるだけ一致させる形状配置合わせ変換を求める。
【0433】
次に、マーカ配置調整部19は、求められた形状配置合わせ変換を、基準形状データd6と原参照形状データd7とにそれぞれ対応する装置配置情報d4に基づいて基準形状データd6と共通の1の座標系に変換された原参照形状データd7に対して適用することによって、基準形状データd6と原参照形状データd7との配置合わせを行う。
【0434】
配置合わせされた基準形状データd6と原参照形状データd7とは、配置合わせ済み個別形状データd17として記憶部14へ供給される。
【0435】
◎配置合わせ可否判定部13B:
図33に示される配置合わせ可否判定部13Bは、三次元形状データ処理システム300Bが機能しているときに作動する機能部である。配置合わせ可否判定部13Bは、マーカ配置調整部19から形状配置合わせ変換M3を表す変換行列を供給されて、これらの変換行列に基づいて、マーカ配置調整部19において生成された複数の配置調整済みマーカ位置データについての形状配置の相互関係を表す評価値を求める。
【0436】
配置合わせ可否判定部13Bは、この評価値を判定用閾値th1と比較することにより、原参照形状データd7が、形状データ取得部10Bからマーカ配置調整部19へと供給された1以上の基準形状データd6に配置合わせされることによって、基準形状データd6とともに対象物についての1の全体的な三次元形状を表すように形状配置を調整することができる配置合わせ可能形状データであるか否かを判定する配置合わせ可否判定処理を行う。
【0437】
なお、判定用閾値th1は、記憶部14に記憶されており、制御処理部15から配置合わせ可否判定部13Bへ供給される。
【0438】
また、原参照形状データd7が、配置合わせ可能形状データであるか否か、すなわち原参照形状データd7の配置合わせが適切にできるか否かを判定した判定結果d21は、制御処理部15へと供給されて、表示部5に表示される。
【0439】
判定結果d21が表示部5に表示されることによって、測定者は、表示部5に表示された配置調整済み参照形状データd16および基準形状データd6の表示状態を種々に変更しつつ目視による配置合わせの確認をする必要が無くなり、客観的な数値によって配置合わせの可否(成否)を判断できるので、目視による判定の誤りを防止することができるとともに、作業効率を向上させることができる。
【0440】
次に、図45および図46に示された形状配置合わせ変換を用いて、複数の配置調整済みマーカ位置データについての形状配置の相互関係を表す評価値を求める手法の例を説明する。
【0441】
図45に示される形状配置合わせ変換M3d、M3e、およびM3fは、それぞれ、配置調整済みマーカ位置データv6’、v7’、およびv8’が、原参照マーカ位置データv6から生成される過程における、各配置調整済みマーカ位置データについての「形状配置の変動情報」を表わしている。
【0442】
ここで、原参照マーカ位置データv6の形状配置を基準とする各歪み含有参照マーカ位置データの形状配置の変化は、形状配置合わせ変換M3d、M3e、およびM3fに比べると極めて小さいので、形状配置合わせ変換M3d、M3e、およびM3fは、それぞれ、原参照マーカ位置データv6についての形状配置を基準とした配置調整済みマーカ位置データv6’、v7’、およびv8’についての相対的な形状配置、すなわち、各配置調整済みマーカ位置データについての形状配置の相互関係を表わしていることになる。
【0443】
図45に示されるように各配置調整済みマーカ位置データの配置合わせが成功する場合は、任意の形状配置に対する配置調整済みマーカ位置データv6’、v7’、およびv8’のそれぞれの相対的な形状配置は、検査規格などによって定められた所定範囲内のばらつきを有する略同一の形状配置となるので、形状配置合わせ変換M3d、M3e、およびM3fをそれぞれ表す複数の変換行列は略同一の変換行列となる。
【0444】
しかし、図46に示されるように各配置調整済みマーカ位置データについての配置合わせが失敗した場合は、配置調整済みマーカ位置データv6’、v7’、およびv8についての相対的形状配置変換をそれぞれ表す複数の変換行列は略同一の変換行列とはならない。
【0445】
従って、配置合わせ可否判定処理の原理の概要において説明したように、それぞれの相対的形状配置変換に基づいて、複数の配置調整済みマーカ位置データの基準マーカ位置データv5に対する配置合わせが成功しているか否か、すなわち、原参照形状データd7が、基準形状データd6に対して配置合わせ可能な配置合わせ可能形状データであるか否かを判定することができるとともに、配置合わせに使用されたマーカが含まれる原参照形状データd7を得た三次元デジタイザ2の装置配置情報d4についても適切であったか否かを判定することもできる。
【0446】
なお、マーカ配置調整部19において原参照マーカ位置データv6が基準マーカ位置データv5への配置合わせを試みられなかった場合においても、図45に示される例と同様に、形状配置合わせ変M3eおよびM3fとして与えられる相対的形状配置変換によって、原参照マーカ位置データv6についての形状配置を基準とした配置調整済みマーカ位置データv7’およびv8’についての相対的な形状配置を表すことができる。
【0447】
なお、相対的形状配置変換として表された、複数の配置調整済みマーカ位置データについての形状配置の相互関係を評価するための評価値を求め、複数の配置調整済みマーカ位置データの配置合わせが成功したか否かを判定する手法に関する評価値の取得方法および判定用閾値th1の設定方法などについは、実施形態1に係る配置合わせ可否判定部13Aについての説明における判定手法と同様の種々の取得方法および設定方法を採用し得る。
【0448】
このように、図45の例では、配置調整済みマーカ位置データv6’、v7’、およびv8’が原参照マーカ位置データv6から生成される過程における、各配置調整済みマーカ位置データについてのそれぞれの形状配置の変動情報である、形状配置合わせ変換M3d、M3e、およびM3fのそれぞれによって、形状配置、装置配置、その他の座標空間における任意の配置を基準とする各配置調整済みマーカ位置データについての相対的な形状配置を与える相対的形状配置変換を表すことができる。また、座標間の関係が既知であれば、配置調整済み参照形状データが存在している座標系とは異なる座標系における配置を基準とすることもできる。
【0449】
以上に説明したように、配置合わせ可否判定部13Bは、1以上の基準形状データd6と原参照形状データd7とが対象物についての1の全体的な三次元形状を表すように、原参照形状データd7についての形状配置をマーカデータ対応関係d13に基づいて調整することができるか否かを、複数の配置調整済みマーカ位置データがそれぞれ表す複数の三次元形状についての形状配置の相互関係に基づいて判定する判定処理を行う。
【0450】
基準マーカ位置データd11と原参照マーカ位置データd12との相互関係によって、両者の配置合わせの可否を判定する場合には、それぞれが表すマーカ位置形状が完全な合同図形であるならば、マーカデータ対応関係d13に従って、それぞれの各マーカの三次元位置が完全に一致する状態を正しい配置合わせの状態であると判定できるが、三次元デジタイザ2の測定誤差のために、基準マーカ位置データd11と原参照マーカ位置データd12が表すマーカ位置形状が合同となることは、実際には、ほとんど起こりえない。
【0451】
従って、基準マーカ位置データd11と原参照マーカ位置データd12との相互関係によっては、基準マーカ位置データd11と原参照マーカ位置データd12とが所定の許容範囲内の精度で対象物の形状を再現できるか否かを判定できない。
【0452】
これに対して、異なるマーカ位置形状を表す複数の配置調整済みマーカ位置データについての形状配置の相互関係に基づいて原参照形状データd7についての配置合わせの可否を判定する本実施形態の手法を採用すれば、マーカの三次元位置によって表される複数の識別点が設けられた対象物上の測定範囲(第2領域)における3以上の着目識別点のそれぞれの位置を表現した原参照マーカ位置データd12から生成された複数の歪み含有参照マーカ位置データd14、または、1以上の歪み含有参照マーカ位置データd14および原参照マーカ位置データd12からなる複数の第3位置データが、原参照マーカ位置データd12の測定範囲と重なる部分を有する測定範囲(第1領域)における3以上の着目識別点のそれぞれの位置を表現した基準マーカ位置データd11に配置合わせさることによって生成された、複数の配置調整済みマーカ位置データについての形状配置の相互関係に基づいて、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かが判定される。
【0453】
従って、基準マーカ位置データd11と原参照マーカ位置データd12とについての形状配置の相互関係によっては、第1領域および第2領域についての対象物の三次元形状をそれぞれ表現した各形状データが、所定の許容範囲内の精度で対象物の三次元形状を再現可能か否かが判定できない場合であっても、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0454】
また、配置合わせ可否判定部13Bは、この相互関係を、例えば、複数の配置調整済みマーカ位置データのそれぞれが原参照マーカ位置データd12から生成される過程における各配置調整済みマーカ位置データについての形状配置の変動情報に基づいて求める手法を採用し得る。
【0455】
形状配置の変動情報に基づいてこの相互関係を求める手法を採用すれば、生成された複数の配置調整済みマーカ位置データがそれぞれ表す三次元形状間の形状配置を解析するなどして該相互関係を求める必要が無く、配置調整済みマーカ位置データが生成される過程における形状配置の変動情報に基づいて該相互関係を求めることができるので、原参照マーカ位置データd12についてのマーカ位置形状に関わらず、正確な相互関係を求めることができ、配置合わせの可否を正しく判定できる確率を向上させることができる。
【0456】
なお、例えば、原参照マーカ位置データd12を構成する同一直線上にない3点以上のマーカの三次元位置にそれぞれ対応する複数の配置調整済みマーカ位置データの3点以上マーカの三次元位置が表すマーカ位置形状間の相互関係に基づいて、複数の配置調整済みマーカ位置データがそれぞれ表すマーカ位置形状についての形状配置の相互関係を求める手法などを採用し得る。
【0457】
また、実施形態1に係る配置合わせ可否判定部13Aと同様に、配置合わせ可否判定部13Bにおいても、各配置調整済みマーカ位置データに対応する各装置配置情報d4に着目することによって配置合わせの可否を判定してもよい。
【0458】
[実施形態2に係る装置およびシステムの動作フロー:]
次に、図29、図30および図47に示されるフローチャートを用いて三次元形状測定システム500B、三次元形状データ処理システム300Bおよび三次元形状処理装置100Bの動作フローを説明する。
【0459】
図29は、三次元形状測定システム500Bによって行われる、対象物1bの全体的な三次元形状を表す形状データを生成する手順ステップS1Bの概要を例示するフローチャートである。
【0460】
また、図30は、三次元形状データ処理システム300Bによって行われる、図29のステップS110に記載された複数の第2の装置配置情報を生成する処理についての概要を例示するフローチャートである。
【0461】
また、図47は、三次元形状処理装置100Bによって行われる、配置合わせ可否判定処理(図30のステップS230B)についての概要を例示するフローチャートである。
【0462】
実施形態1に係る図29、図30および図31に記載されたフローチャートと、実施形態2に係る図29、図30および図47に記載されたフローチャートとでは、実質的には、図31および図47に記載された配置合わせ可否判定処理(ステップS230およびS230B)のフローチャートのみが異なるものである。
【0463】
従って、実施形態2に係る動作のフローとしては、以下に図47に記載された配置合わせ可否判定処理(ステップS230B)のみを説明する。
【0464】
図47のステップS410において、形状データ取得部10Bは、供給された複数のマーカが添付された対象物1bについての複数の判定用形状データd1のうち、1以上の判定用形状データd1を基準形状データd6として取得するとともに、1以上の基準形状データd6が表す三次元形状の一部または全部と略同一の三次元形状であって、対象物1bに貼付された複数のマーカのうち3以上のマーカ群の三次元形状が含まれる三次元形状を表す形状データを含んだ他の判定用形状データd1を原参照形状データd7として取得し、1以上の基準形状データd6と原参照形状データd7とをマーカ位置データ取得部16およびマーカ配置調整部19へと供給する。
【0465】
次に、マーカ位置データ取得部16は、供給された1以上の基準形状データd6および原参照形状データd7について、それぞれ含まれる全てのマーカの三次元位置を求め、基準形状データd6についての全てのマーカの三次元位置と、原参照形状データd7についての全てのマーカの三次元位置とから、これらの形状データ間にわたる相互関係において、マーカ位置形状が相互に最も合同関係に近い3以上のマーカの三次元位置を探索し、1以上の基準マーカ位置データd11において探索された3以上のマーカの三次元位置を、1以上の基準マーカ位置データd11として生成して対応関係取得部17およびマーカ配置調整部19へと供給する(ステップS420)。
【0466】
また、原参照マーカ位置データd12において探索された3以上のマーカの三次元位置を原参照マーカ位置データd12として生成し、対応関係取得部17、マーカ歪み付与部18およびマーカ配置調整部19へ供給する(ステップS430)。
【0467】
対応関係取得部17は、供給された1以上の基準マーカ位置データd11および原参照マーカ位置データd12のそれぞれが表す略合同なマーカ位置形状間の対応関係などに基づいて、各基準マーカ位置データd11についての各マーカの三次元位置と原参照マーカ位置データd12についての各マーカの三次元位置との対応関係を表すマーカデータ対応関係d13を生成しマーカ配置調整部19へ供給する(ステップS440)。
【0468】
マーカ歪み付与部18は、別途制御処理部15から供給された三次元デジタイザ2の測定精度d18などに基づいて、供給された原参照マーカ位置データd12についての各マーカの三次元位置の少なくとも1つを変更することによって、原参照マーカ位置データd12が表す三次元形状である原参照マーカ位置形状に1または相互に異なる複数の歪みが付与された1または複数の歪み含有参照マーカ位置形状を、それぞれ表す1または複数の歪み含有参照マーカ位置データd14を生成し、マーカ配置調整部19へと供給する(ステップS450)。
【0469】
マーカ配置調整部19は、供給されたマーカデータ対応関係d13に基づいて、原参照マーカ位置データd12および、1または複数の歪み含有参照マーカ位置データd14、あるいは複数の歪み含有参照マーカ位置データd14のそれぞれについての各マーカの三次元位置と、1以上の基準マーカ位置データについての各マーカの三次元位置とが、1の座標系においてそれぞれなるべく一致するように、原参照マーカ位置データd12が表すマーカ位置形状と、1または複数の歪み含有参照マーカ位置データd14が表すマーカ位置形状とのそれぞれについての位置および姿勢を示す複数の形状配置を調整すること、または、複数の歪み含有参照マーカ位置データd14が表すマーカ位置形状についての複数の形状配置を調整することによって、複数の配置調整済みマーカ位置データを生成する。
【0470】
また、マーカ配置調整部19は、複数の配置調整済みマーカ位置データの生成過程で得られた複数のアフィン変換である形状配置合わせ変換M3を配置合わせ可否判定部13Bへ供給するとともに、基準形状データd6と、形状配置合わせ変換M3によって配置した基準形状データd6を配置調整済み参照形状データd16として記憶部14へ供給する(ステップS460)。
【0471】
配置合わせ可否判定部13Bへ供給された形状配置合わせ変換M3は、配置合わせ可否判定部13Bによって、複数の配置調整済みマーカ位置データがそれぞれ表す複数の三次元形状についての形状配置の相互関係を表す評価値へと変換される(ステップS470)。
【0472】
配置合わせ可否判定部13Bは、この評価値と、制御処理部15から供給される判定用閾値th1とを比較する(ステップS480)。
【0473】
比較の結果、評価値が判定用閾値th1以下であれば、複数の配置調整済みマーカ位置データの配置合わせが成功した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データであると判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS490)、処理はステップS230B(図30)へと戻される。
【0474】
比較の結果、評価値が判定用閾値th1よりも大きければ、複数の配置調整済みマーカ位置データの配置合わせが失敗した、すなわち、原参照形状データd7は基準形状データd6に対して適切に配置合わせ可能な配置合わせ可能形状データではないと判定されてこの判定結果を示す判定結果d21は制御処理部15へと供給され(ステップS492)、処理はステップS230Bへと戻されて、配置合わせ可否判定処理の全行程が終了する。
【0475】
以上に説明した三次元形状処理装置100Bによる配置合わせ可否判定処理および図30に記載された三次元形状データ処理システム300Bによる複数の第2の装置配置情報を生成する処理、および図29に記載された処理によって、三次元形状測定システム500Bは、対象物1bの全体的な三次元形状を表す形状データを生成する。
【符号の説明】
【0476】
500A,500B 三次元形状測定システム
300A,300B 三次元形状データ処理システム
100A,100B 三次元形状データ処理装置
1,1a,1b 対象物
2,2a,2b 三次元デジタイザ
2i 仮想三次元デジタイザ
3a マニピュレータ
3b マニピュレータ制御部
4 操作部
5 表示部
6 入出力部
7 抽出部
8 CADシステム
9 記録媒体
10A,10B 形状データ取得部
11 ズレ歪み付与部
12 形状配置調整部
13A,13B 配置合わせ可否判定部
14 記憶部
15 制御処理部
16 マーカ位置データ取得部
17 対応関係取得部
18 マーカ歪み付与部
19 マーカ配置調整部
30 仮想カメラ視線
n1,n2,n1’,n2’,n3,n4 測定範囲
th1 判定閾値
d1,d1a,d1b,d1c,d1d 判定用形状データ
d2,d2a,d2b,d2c,d2d 個別形状データ
d3 測定パラメータ
d4,d4a,d4b,d4b’,d4c,d4d 装置配置情報
d5,d5a,d5b,d5c,d5d CADデータ
d6,d6a,d6b 基準形状データ
d7,d7a,d7b 原参照形状データ
d8,d8a,d8a’,d8b ズレ歪み含有参照形状データ
d11,v5 基準マーカ位置データ
d12,v6 原参照マーカ位置データ
d13,d13a,d13b マーカデータ対応関係
d14,v7,v8 歪み含有参照マーカ位置データ
d16,d16a,d16b,d16c 配置調整済み参照形状データ
d17 配置合わせ済み個別形状データ
d18 測定精度
d19 配置決め精度
d20 対象物配置情報
d21 判定結果
M1,M1a,M1b,M1c,M1d,M1e 形状歪み変換
M2,M2a,M2b 形状配置ずらし変換
M3,M3a,M3b,M3c,M3d,M3e,M3f 形状配置合わせ変換
b1,b2,b3,b4,b5,b6 三次元位置
c1,c2,c3,c4 マーカ位置形状
v1,v2,v3,v4 マーカ位置データ
f1,f2,f3,f4,f5,f6 マーカ
c5 基準マーカ位置形状
c6 原参照マーカ位置形状
c7,c8 歪み含有参照マーカ位置形状
c6’,c7’,c8’ 配置調整済みマーカ位置形状
v6’,v7’,v8’ 配置調整済みマーカ位置データ
【特許請求の範囲】
【請求項1】
対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、
前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4形状データを生成する形状配置調整手段と、
単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4形状データについての形状配置の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項2】
対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、
前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みる形状配置調整手段と、
単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記派生データ生成処理において前記複数の第3形状データが生成されるときの前記第2形状データについての複数の形状配置の変動情報と、前記配置合わせ処理における前記複数の第3形状データについての複数の形状配置の変動情報とが、それぞれ合成された複数の形状配置の変動情報の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項3】
請求項1または請求項2に記載された三次元形状データ処理装置であって、
前記複数の幾何学的状態は、
(a)前記所定の座標系における三次元的な位置および姿勢に相当する形状配置のズレ状態と、
(b)三次元的な歪み状態と、
のうち、少なくとも一方が互いに異なる状態であることを特徴とする三次元形状データ処理装置。
【請求項4】
請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、
前記複数の第3形状データのうちのひとつは、前記第2形状データ自身であることを特徴とする三次元形状データ処理装置。
【請求項5】
請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、
前記複数の第3形状データのすべては、前記第2形状データとは異なる幾何学的状態を表現していることを特徴とする三次元形状データ処理装置。
【請求項6】
請求項1から請求項5のいずれか1つの請求項に記載された三次元形状データ処理装置と、
前記三次元形状データ処理装置で用いる前記第1形状データと前記第2形状データとを生成する形状データ生成手段と、
を備えることを特徴とする三次元形状データ処理システム。
【請求項7】
請求項6に記載された三次元形状データ処理システムであって、
前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成することを特徴とする三次元形状データ処理システム。
【請求項8】
請求項6に記載された三次元形状データ処理システムであって、
前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、三次元形状を測定して形状データを取得する測定装置を用いて測定された前記対象物についての形状データに基づいて生成することを特徴とする三次元形状データ処理システム。
【請求項9】
請求項6から請求項8のいずれか1つの請求項に記載された三次元形状データ処理システムであって、
前記判定手段において前記再現の可能性を否定する判定結果が出たときには、
(a)前記形状データ生成手段は、前記第1領域および前記第2領域のいずれとも異なる前記対象物上の第3領域の三次元形状を表現する第5形状データを、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成し、
(b)前記取得手段は、前記第2形状データに替えて前記第5形状データを取得することを特徴とする三次元形状データ処理システム。
【請求項10】
対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、
三次元測定を行って前記複数の個別形状データを取得する測定装置と、
前記測定装置と前記対象物とを相対的に配置する配置手段と、
請求項6から請求項9のいずれか1つの請求項に記載された三次元形状データ処理システムと、
を備え、
前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする三次元形状測定システム。
【請求項11】
複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、
前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4位置データを生成する形状配置調整手段と、
単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4位置データについての形状配置の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項12】
複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、
前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みる形状配置調整手段と、
単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記配置合わせ処理における前記複数の第3位置データのそれぞれについての形状配置の変動情報の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項13】
請求項11または請求項12に記載された三次元形状データ処理装置と、
前記三次元形状データ処理装置で用いる前記第1位置データと前記第2位置データとのそれぞれの生成に用いられる、前記第1領域についての前記対象物の三次元形状を表現した第1形状データと、前記第2領域についての前記対象物の三次元形状を表現した第2形状データとを生成する形状データ生成手段と、
を備えることを特徴とする三次元形状データ処理システム。
【請求項14】
複数の識別点が設けられた対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、
三次元測定を行って前記複数の個別形状データを取得する測定装置と、
前記測定装置と前記対象物とを相対的に配置する配置手段と、
請求項13に記載された三次元形状データ処理システムと、
を備え、
前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする三次元形状測定システム。
【請求項1】
対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、
前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4形状データを生成する形状配置調整手段と、
単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4形状データについての形状配置の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項2】
対象物の三次元形状のうち、当該対象物上で互いに重なる部分を有する第1領域と第2領域とについて、前記第1領域の三次元形状を表現した第1形状データと、前記第2領域の三次元形状を表現した第2形状データとを取得する取得手段と、
前記第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3形状データのそれぞれについて、所定の座標系において前記第1形状データへの配置合わせ処理を試みる形状配置調整手段と、
単一の座標系で前記第1形状データと前記第2形状データとの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記派生データ生成処理において前記複数の第3形状データが生成されるときの前記第2形状データについての複数の形状配置の変動情報と、前記配置合わせ処理における前記複数の第3形状データについての複数の形状配置の変動情報とが、それぞれ合成された複数の形状配置の変動情報の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項3】
請求項1または請求項2に記載された三次元形状データ処理装置であって、
前記複数の幾何学的状態は、
(a)前記所定の座標系における三次元的な位置および姿勢に相当する形状配置のズレ状態と、
(b)三次元的な歪み状態と、
のうち、少なくとも一方が互いに異なる状態であることを特徴とする三次元形状データ処理装置。
【請求項4】
請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、
前記複数の第3形状データのうちのひとつは、前記第2形状データ自身であることを特徴とする三次元形状データ処理装置。
【請求項5】
請求項1から請求項3のいずれか1つの請求項に記載された三次元形状データ処理装置であって、
前記複数の第3形状データのすべては、前記第2形状データとは異なる幾何学的状態を表現していることを特徴とする三次元形状データ処理装置。
【請求項6】
請求項1から請求項5のいずれか1つの請求項に記載された三次元形状データ処理装置と、
前記三次元形状データ処理装置で用いる前記第1形状データと前記第2形状データとを生成する形状データ生成手段と、
を備えることを特徴とする三次元形状データ処理システム。
【請求項7】
請求項6に記載された三次元形状データ処理システムであって、
前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成することを特徴とする三次元形状データ処理システム。
【請求項8】
請求項6に記載された三次元形状データ処理システムであって、
前記形状データ生成手段は、前記第1形状データおよび前記第2形状データの少なくとも一方を、三次元形状を測定して形状データを取得する測定装置を用いて測定された前記対象物についての形状データに基づいて生成することを特徴とする三次元形状データ処理システム。
【請求項9】
請求項6から請求項8のいずれか1つの請求項に記載された三次元形状データ処理システムであって、
前記判定手段において前記再現の可能性を否定する判定結果が出たときには、
(a)前記形状データ生成手段は、前記第1領域および前記第2領域のいずれとも異なる前記対象物上の第3領域の三次元形状を表現する第5形状データを、前記対象物の形状を設計数値的に表現した既知の形状データに基づいて生成し、
(b)前記取得手段は、前記第2形状データに替えて前記第5形状データを取得することを特徴とする三次元形状データ処理システム。
【請求項10】
対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、
三次元測定を行って前記複数の個別形状データを取得する測定装置と、
前記測定装置と前記対象物とを相対的に配置する配置手段と、
請求項6から請求項9のいずれか1つの請求項に記載された三次元形状データ処理システムと、
を備え、
前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする三次元形状測定システム。
【請求項11】
複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、
前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みることによって、当該処理の結果として複数の第4位置データを生成する形状配置調整手段と、
単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記複数の第4位置データについての形状配置の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項12】
複数の識別点が設けられた対象物の三次元形状のうち、当該対象物上で互いに重なる部分に3点以上の識別点を有する第1領域と第2領域とについて、前記第1領域における前記3点以上の識別点のうち3以上の着目識別点のそれぞれの位置を表現した第1位置データと、前記第2領域における前記3以上の着目識別点のそれぞれの位置を表現した第2位置データとを取得する取得手段と、
前記第2位置データに基づいて、前記3以上の着目識別点の分布の歪み状態が互いに異なる複数の状態をそれぞれ表現した複数の第3位置データを生成する派生データ生成処理を行う派生データ生成手段と、
前記複数の第3位置データのそれぞれについて、所定の座標系において前記第1位置データへの配置合わせ処理を試みる形状配置調整手段と、
単一の座標系で前記第1領域および前記第2領域についての前記対象物の三次元形状をそれぞれ表現した各形状データの配置合わせを試みたときに、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲について、所定の許容範囲内の精度で前記対象物の三次元形状を再現可能か否かを、前記配置合わせ処理における前記複数の第3位置データのそれぞれについての形状配置の変動情報の相互関係に基づいて判定する判定手段と、
を備えることを特徴とする三次元形状データ処理装置。
【請求項13】
請求項11または請求項12に記載された三次元形状データ処理装置と、
前記三次元形状データ処理装置で用いる前記第1位置データと前記第2位置データとのそれぞれの生成に用いられる、前記第1領域についての前記対象物の三次元形状を表現した第1形状データと、前記第2領域についての前記対象物の三次元形状を表現した第2形状データとを生成する形状データ生成手段と、
を備えることを特徴とする三次元形状データ処理システム。
【請求項14】
複数の識別点が設けられた対象物の三次元形状を複数の方向から測定して得られる複数の個別形状データに基づいて前記対象物の全体的な三次元形状を表す形状データを生成する三次元形状測定システムであって、
三次元測定を行って前記複数の個別形状データを取得する測定装置と、
前記測定装置と前記対象物とを相対的に配置する配置手段と、
請求項13に記載された三次元形状データ処理システムと、
を備え、
前記測定装置が前記複数の個別形状データを取得する際には、前記再現の可能性を肯定する判定が前記判定手段で得られたことを条件として、前記対象物のうち前記第1領域と前記第2領域とを包含する範囲については、前記第1形状データと前記第2形状データとにそれぞれ対応する、前記測定装置と前記対象物との配置関係に基づいて前記測定装置と前記対象物とを相対的に配置することを特徴とする三次元形状測定システム。
【図1】

【図2】
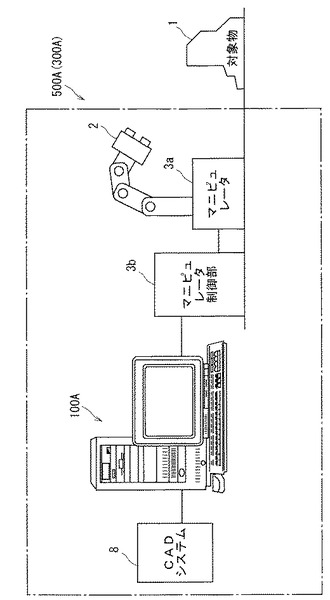
【図3】
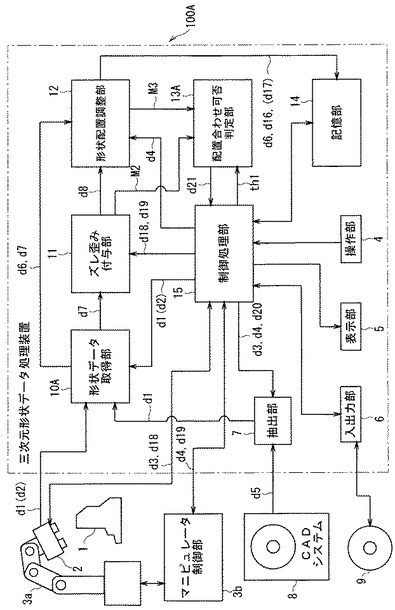
【図4】
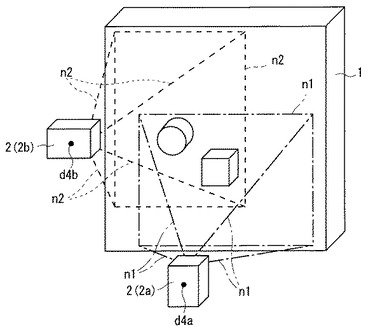
【図5】
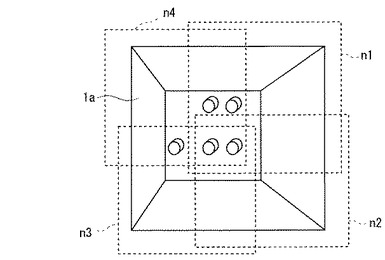
【図6】
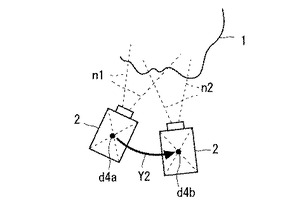
【図7】
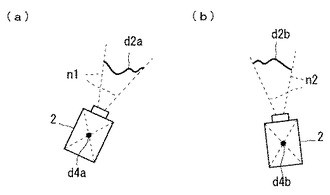
【図8】
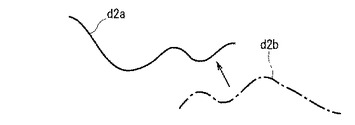
【図9】
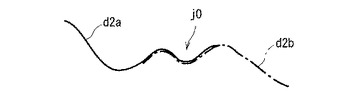
【図10】
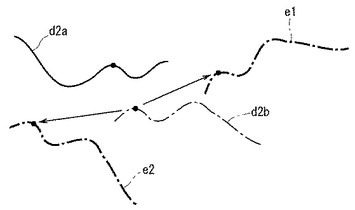
【図11】
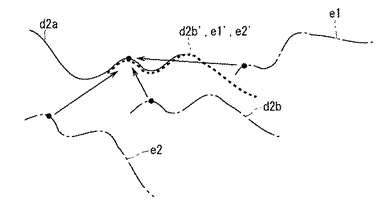
【図12】
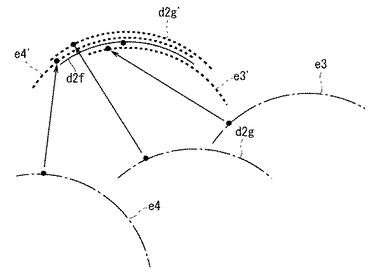
【図13】
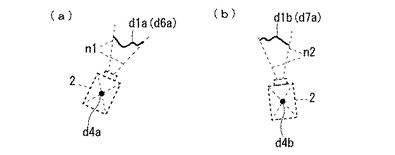
【図14】
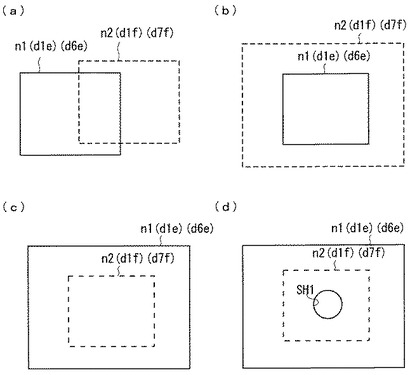
【図15】
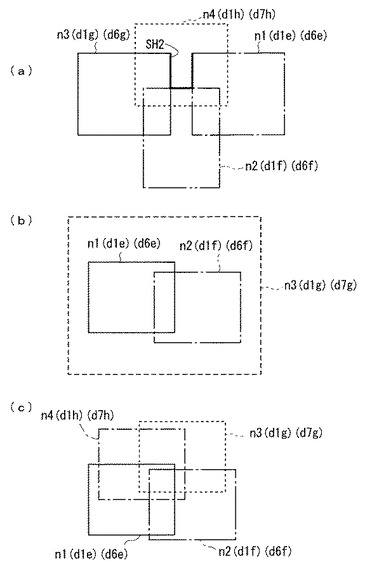
【図16】
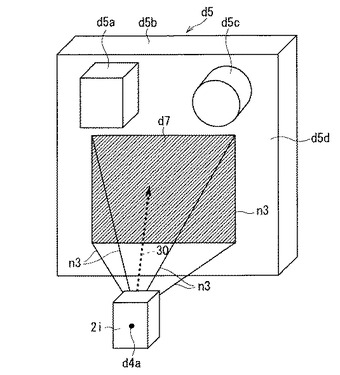
【図17】
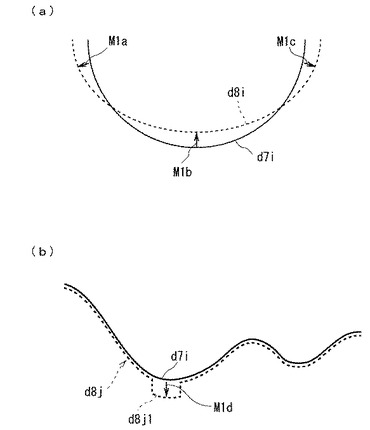
【図18】
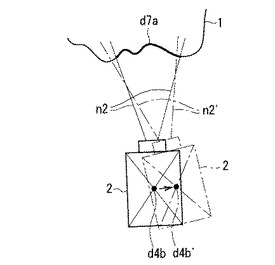
【図19】
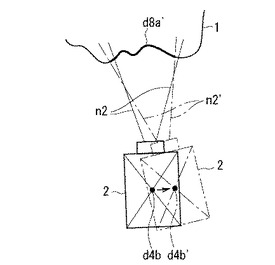
【図20】
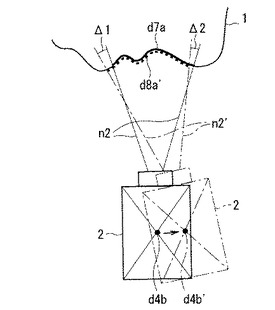
【図21】
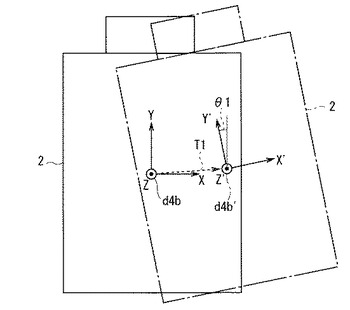
【図22】
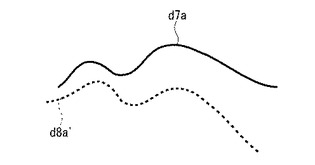
【図23】
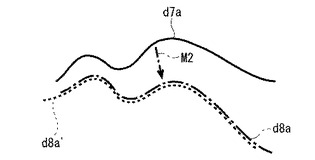
【図24】
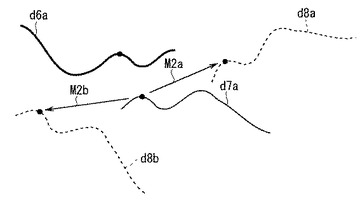
【図25】
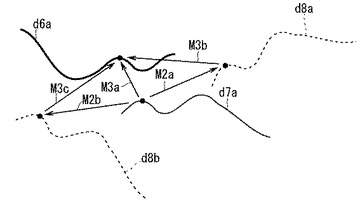
【図26】

【図27】
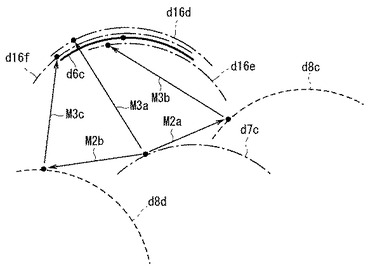
【図28】
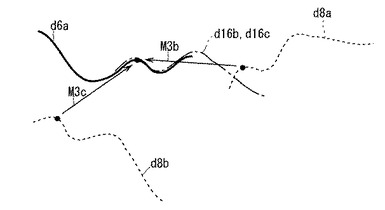
【図29】
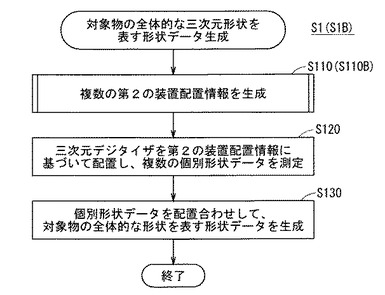
【図30】
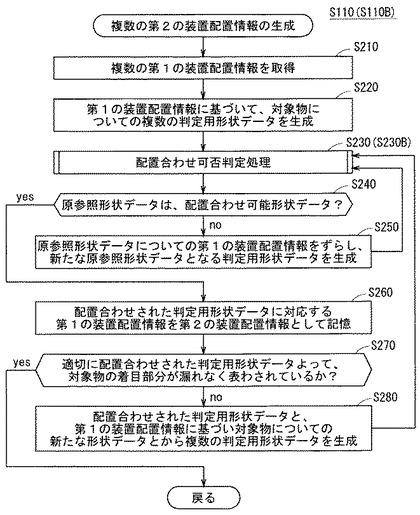
【図31】
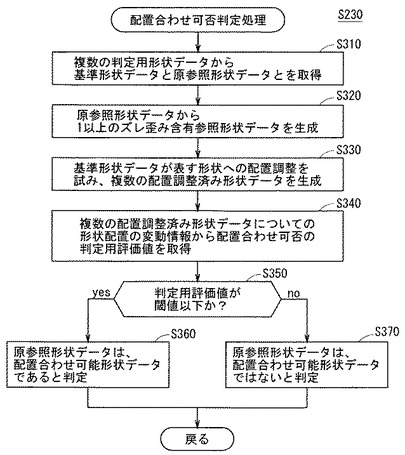
【図32】
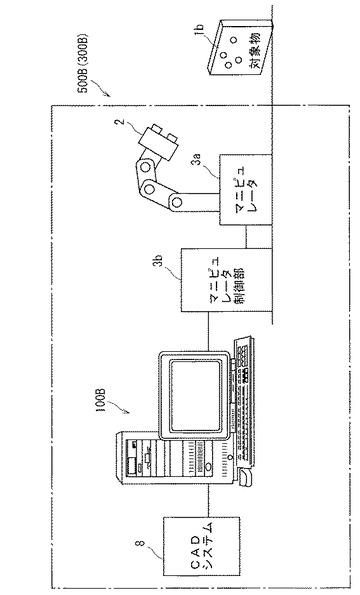
【図33】
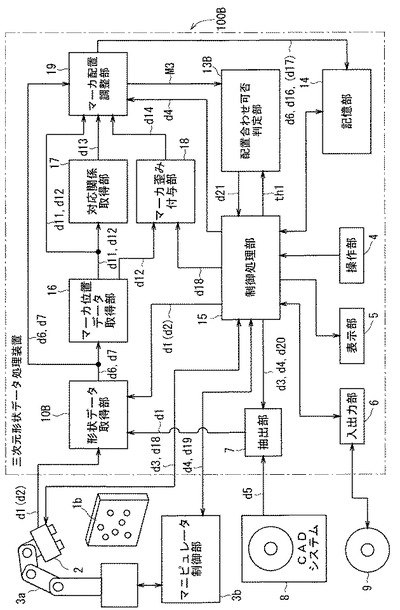
【図34】
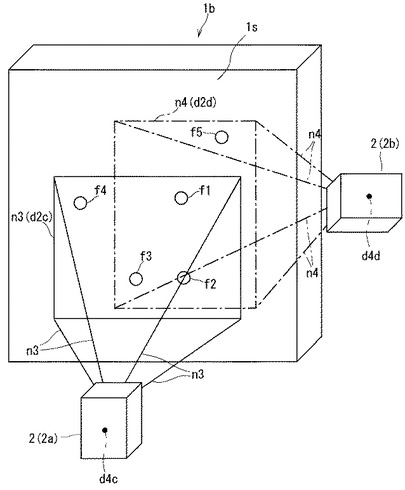
【図35】
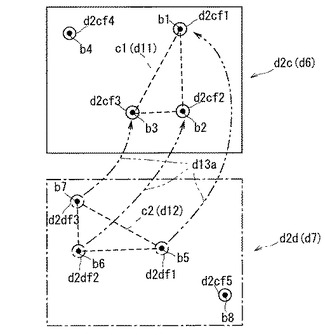
【図36】
【図37】
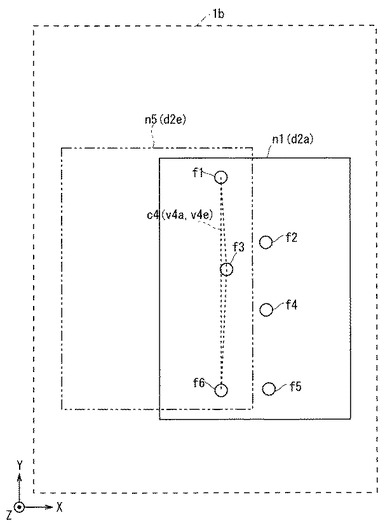
【図38】
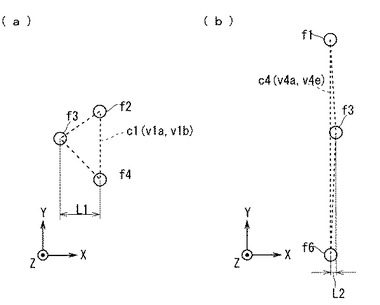
【図39】
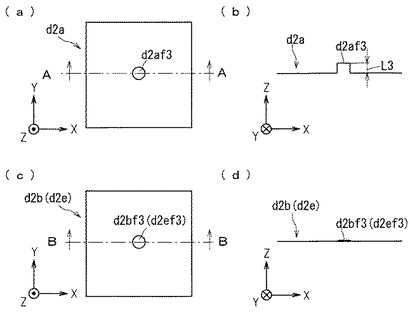
【図40】
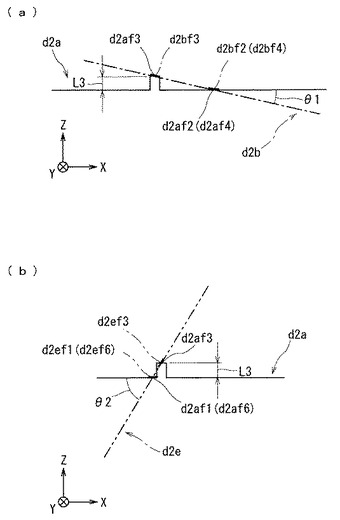
【図41】
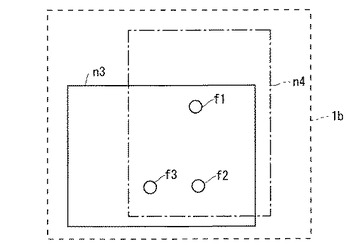
【図42】
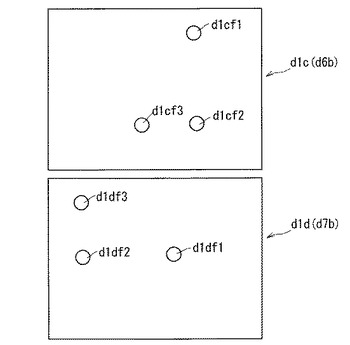
【図43】
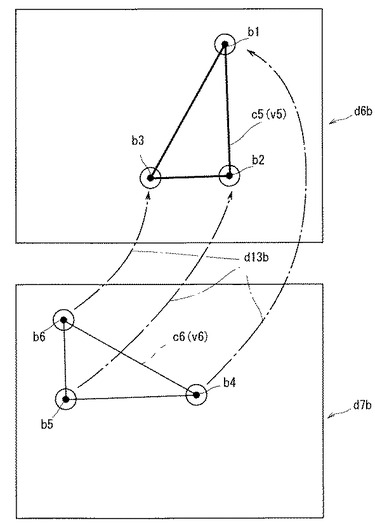
【図44】
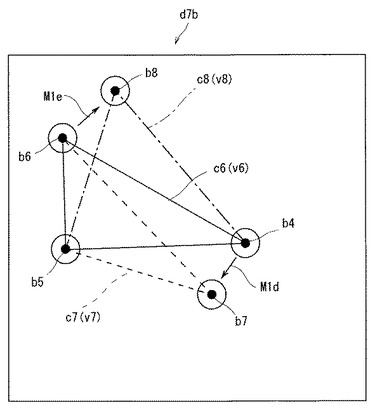
【図45】
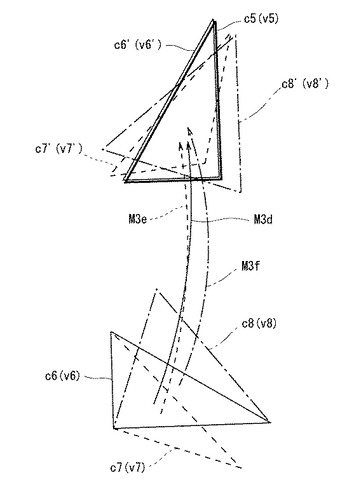
【図46】
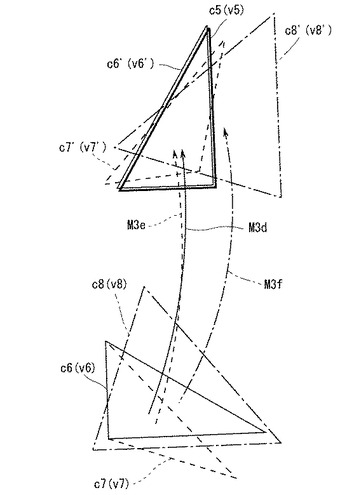
【図47】
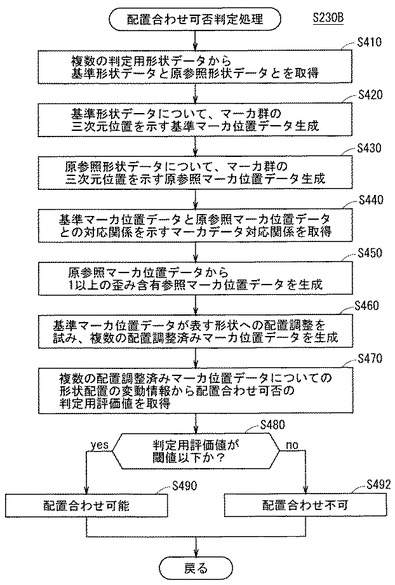
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【公開番号】特開2011−47863(P2011−47863A)
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願番号】特願2009−198087(P2009−198087)
【出願日】平成21年8月28日(2009.8.28)
【出願人】(303050160)コニカミノルタセンシング株式会社 (175)
【Fターム(参考)】
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願日】平成21年8月28日(2009.8.28)
【出願人】(303050160)コニカミノルタセンシング株式会社 (175)
【Fターム(参考)】
[ Back to top ]