
三次元形状測定システム及び三次元形状測定方法
【課題】被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供する。
【解決手段】色が規則的に変化する光パルスをパルス光源56及びチャープ導入装置60により生成し、生成された前記光パルスをワーク30に照射し、該ワーク30から反射された前記光パルスの反射光像をシャッタユニット42により取得し、取得された前記反射光像の二次元情報及び色情報を用いてワーク30の三次元情報をカラー二次元検出器88により取得する。また、カラー二次元検出器88により取得されたワーク30の二次元情報に基づいて所定の箇所を選択し、該所定の箇所における三次元情報を取得する。
【解決手段】色が規則的に変化する光パルスをパルス光源56及びチャープ導入装置60により生成し、生成された前記光パルスをワーク30に照射し、該ワーク30から反射された前記光パルスの反射光像をシャッタユニット42により取得し、取得された前記反射光像の二次元情報及び色情報を用いてワーク30の三次元情報をカラー二次元検出器88により取得する。また、カラー二次元検出器88により取得されたワーク30の二次元情報に基づいて所定の箇所を選択し、該所定の箇所における三次元情報を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定物の三次元形状を測定する三次元形状測定システム及び三次元形状測定方法に関する。
【背景技術】
【0002】
被測定物の三次元形状、例えばワークの塗装面等の表面欠陥やその平滑さを測定する方法の一つとして、パルス光を用いたTOF(Time of Flight)法が挙げられる。
【0003】
パルス光を用いたTOF法とは、パルス光源から照射されたパルス光が、被測定物の表面の照射領域で反射され、検出器により検出されるまでの飛行時間(TOF)と光速度とから、奥行き方向の距離差として換算し、物体の三次元形状を測定するものである。
【0004】
例えば、特許文献1には、波長が規則的に経時変化するパルス光(いわゆるチャープ光パルス)を用い、三次元情報を二次元画像である色付き等高線マップに変換して検出する技術が開示されている。このように構成すれば、被測定物の三次元形状を高精度且つ高速で測定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2500379号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された装置を用いることにより被測定物の三次元形状を高精度に測定できる反面、その測定精度を確保するために、パルス光の照射領域(面積)を狭小の空間内に設定する必要がある。このため、以下のような測定上の不都合が生じ得る。
【0007】
例えば、ワークの塗装面等の表面欠陥の有無について検査する場合、通常は欠陥が全く存在しないか、ごく稀に欠陥が存在する程度である。このとき、上述の装置を用いて三次元形状の測定を行うと、検査時間が膨大となり効率が悪い。
【0008】
本発明は上記した問題を解決するためになされたもので、被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1記載の発明に係る三次元形状測定システムは、色が規則的に変化する光パルスを生成する光パルス生成手段と、前記光パルス生成手段により生成された前記光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、前記反射光像取得手段により取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記被測定物の二次元情報を取得する二次元検出器と、を有することを特徴とする。
【0010】
請求項1記載の発明によれば、被測定物の二次元情報を取得する二次元検出器を設けたので、被測定物の二次元情報をあわせて取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0011】
請求項2記載の発明に係る三次元形状測定システムは、被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得する第1の反射光像取得手段と、色が規則的に変化する光パルスを生成する光パルス生成手段と、前記光パルス生成手段により生成された前記光パルスを前記被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得する第2の反射光像取得手段と、前記第1の反射光像取得手段により取得された前記第1反射光像の二次元情報、又は前記第2の反射光像取得手段により取得された前記第2反射光像の二次元情報を取得する二次元検出器と、前記二次元検出器により取得された前記第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記第1又は前記第2の反射光像取得手段の切替を行う切替手段と、を有することを特徴とする。
【0012】
ここで、「被測定物の二次元情報を取得するための光」とは、被測定物の表面を表す平面画像を取得するために不可欠な光であり、自然光のみならず、蛍光灯・発光ダイオード・レーザ光等の人工的な照明光をも含む。従って、「被測定物の二次元情報を取得するための光」には、被測定物の三次元情報を取得するために調製された光、例えば、チャープ光やスリット光は含まれない。
【0013】
請求項2記載の発明によれば、第1又は第2の反射光像取得手段の切替を行う切替手段を設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0014】
請求項3記載の発明に係る三次元形状測定システムは、請求項1又は2に記載の三次元形状測定システムにおいて、前記三次元情報取得手段により取得された前記被測定物の三次元情報と前記二次元検出器により取得された前記被測定物の二次元情報とを合成する三次元情報合成手段を有することを特徴とする。
【0015】
請求項3記載の発明によれば、被測定物の三次元情報と二次元情報とを合成する三次元情報合成手段を設けたので、被測定物の三次元形状の外観を視覚的且つ容易に把握することができる。
【0016】
請求項4記載の発明に係る三次元形状測定方法は、被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得し、該第1反射光像の二次元情報を取得する二次元情報取得工程と、色が規則的に変化する光パルスを生成し、該光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程と、を有し、前記二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して前記三次元情報取得工程を行う工程を備えることを特徴とする。
【0017】
請求項4記載の発明によれば、取得された二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して三次元情報取得工程を行う工程を設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【発明の効果】
【0018】
本発明に係る三次元形状測定システムによれば、色が規則的に変化する光パルスを生成する光パルス生成手段と、生成された前記光パルスを被測定物に照射し、前記被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記被測定物の二次元情報を取得する二次元検出器とを設けたので、被測定物の二次元情報をあわせて取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0019】
また、本発明に係る三次元形状測定システムによれば、被測定物から反射された光の第1反射光像を取得する第1の反射光像取得手段と、前記被測定物から反射された、色が規則的に変化する光パルスの第2反射光像を取得する第2の反射光像取得手段との切替を行う切替手段とを設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0020】
さらに、本発明に係る三次元形状測定方法によれば、被測定物から反射された光の第1反射光像の二次元情報を取得する二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、色が規則的に変化する光パルスを前記所定の箇所に照射し、該所定の箇所から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程を行うようにしたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【図面の簡単な説明】
【0021】
【図1】第1の実施形態における三次元形状測定システムの概略側面図である。
【図2】第1の実施形態におけるシャッタ装置の概略断面図である。
【図3】第1の実施形態における三次元形状測定装置、チャープ光生成装置及びシャッタ装置の構成ブロック図である。
【図4】第1の実施形態の第1変形例における三次元形状測定装置、チャープ光生成装置及びシャッタ装置の構成ブロック図である。
【図5】第1の実施形態の第1変形例におけるシャッタ及び超高速シャッタの開閉タイミングチャートである。
【図6】第1の実施形態の第2変形例におけるシャッタ装置の概略断面図である。
【図7】第1の実施形態の第2変形例におけるシャッタ装置の概略断面図である。
【図8】第2の実施形態における三次元形状測定システムの概略側面図である。
【図9】第2の実施形態における三次元形状測定装置の構成ブロック図である。
【図10】第2の実施形態の変形例における三次元形状測定装置の構成ブロック図である。
【図11】図11A及び図11Bは、第2の実施形態の変形例におけるシャッタ及び超高速シャッタの開閉タイミングチャートである。
【発明を実施するための形態】
【0022】
以下、本発明に係る三次元形状測定システムについて好適な実施形態を挙げ、添付の図面を参照して詳細に説明する。
【0023】
先ず、本発明に係る三次元形状測定システムの第1の実施形態について図1〜図3を参照しながら説明する。
【0024】
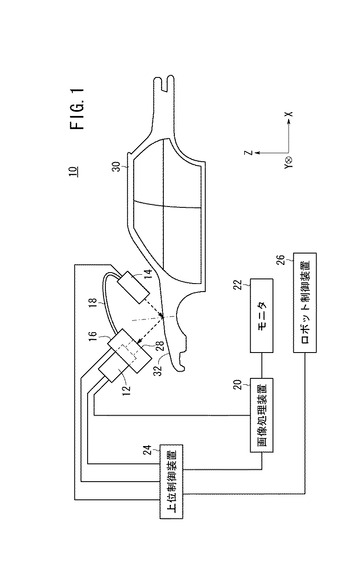
図1は、第1の実施形態における三次元形状測定システム10の概略側面図である。
【0025】
この三次元形状測定システム10は、三次元形状測定装置12と、チャープ光生成装置14と、シャッタ装置16と、ファイバケーブル18と、画像処理装置20と、モニタ22と、上位制御装置24と、ロボット制御装置26とを備える。
【0026】
三次元形状測定装置12の撮像面28は、被測定物としてのワーク30の表面32側を指向する。また、三次元形状測定装置12は、図示しないロボットのアームに装着されているので、前記ロボット制御装置26による制御下に前記ロボットのアームの駆動に従って上下・左右方向に移動が自在である。
【0027】
チャープ光生成装置14は、三次元形状測定装置12と同様に、ワーク30の表面32側を指向し、図示しないロボットのアームに装着されている。また、チャープ光生成装置14の指向方向とワーク30の表面32の法線方向とのなす角は、三次元形状測定装置12の指向方向と前記法線方向とのなす角と同一である位置関係にある。
【0028】
シャッタ装置16は、三次元形状測定装置12に装着されており着脱が自在である。また、シャッタ装置16は、チャープ光生成装置14とファイバケーブル18を介して光学的に接続されている。
【0029】
画像処理装置20は、三次元形状測定装置12に電気的に接続されており、三次元形状測定装置12から供給される撮像信号に対して種々の画像処理を行う。上位制御装置24は、三次元形状測定装置12、チャープ光生成装置14、シャッタ装置16、画像処理装置20や、図示しないロボットの駆動制御を行うロボット制御装置26に対して各種の指示を送信する。また、上位制御装置24が備える図示しない操作部から測定モード(後述する二次元モード又は三次元モード)を設定可能である。
【0030】
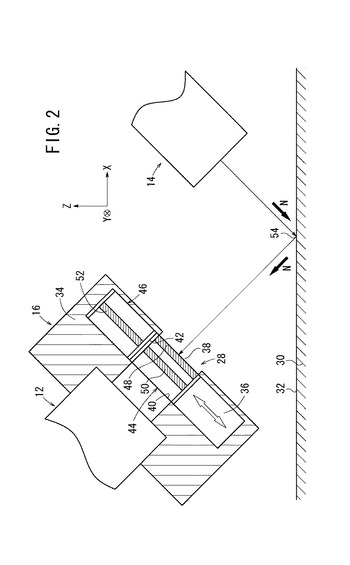
図2は、第1の実施形態におけるシャッタ装置16の概略断面図である。
【0031】
この三次元形状測定装置12の先端部に嵌合されているシャッタ装置16は、直方体状の本体34を有している。この本体34の内部には直方体状の空洞部36が設けられており、この空洞部36は、本体34の一方の側面に設けられている開口部38を介して外部と連通する。開口部38は、三次元形状測定装置12の受光面40と対向する位置関係にある。
【0032】
空洞部36内にはシャッタユニット(反射光像取得手段)42が設けられており、該シャッタユニット42は図示しない駆動機構により白抜矢印方向に移動が自在である。
【0033】
機械式又は電子式のシャッタ(第1の反射光像取得手段)44は、遮光性を有する金属等からなる先幕48と後幕50とを備える。先幕48と後幕50は、後述するシャッタ開閉制御部の制御下にそれぞれ独立にY軸方向に移動(開閉)が自在である。
【0034】
非線形光学シャッタ等から構成される超高速シャッタ(第2の反射光像取得手段)46は、非線形光学材料からなるシャッタ幕52を備える。シャッタ幕52は、励起光の照射によって屈折率が変化する物性を有する。例えば、カー効果を利用するシャッタ(カーシャッタ)の場合は、非線形光学材料を透過する光の偏光状態を変化させることができる。
【0035】
チャープ光生成装置14から射出される後述するチャープ光パルスは、ワーク30の表面32上の照射領域54に照射され、ワーク30の表面32上で反射され、三次元形状測定装置12の撮像面28に臨む。
【0036】
ワーク30の二次元情報を取得するための光としての自然光Nは、ワーク30の表面32上に種々の角度方向から入射又は反射されている。
【0037】
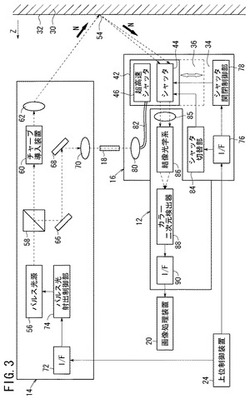
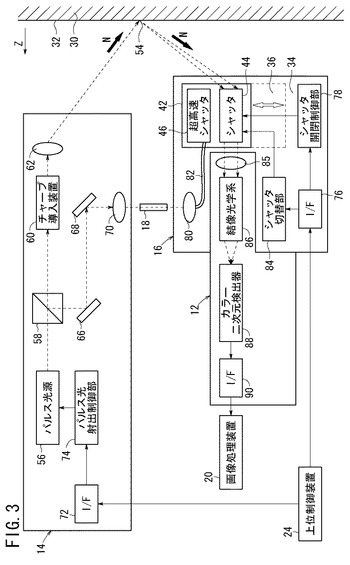
図3は、第1の実施形態における三次元形状測定装置12、チャープ光生成装置14及びシャッタ装置16の構成ブロック図である。
【0038】
このチャープ光生成装置14は、パルス光を射出するパルス光源56と、該パルス光源56により射出されたパルス光を分割するビームスプリッタ58と、該ビームスプリッタ58を透過されたパルス光をチャープすることでチャープ光パルスを生成するチャープ導入装置60と、該チャープ導入装置60により生成されたチャープ光パルスの光束を集光してワーク30の表面32上に焦点像(照射領域54)を形成する対物レンズ62とを備える。なお、色が規則的に変化する光パルスを生成する光パルス生成手段は、パルス光源56とチャープ導入装置60とから構成される。
【0039】
また、チャープ光生成装置14は、ビームスプリッタ58により反射されたパルス光を所定の角度方向に反射する反射ミラー66、68と、該反射ミラー66、68からの反射光をファイバケーブル18を介して三次元形状測定装置12に伝送するファイバ結合用レンズ70とを備える。
【0040】
さらに、チャープ光生成装置14は、上位制御装置24からの測定開始指示を受信するI/F72と、該I/F72により受信された測定開始指示に基づいてパルス光源56のパルス光の射出を制御するパルス光射出制御部74とを備える。
【0041】
シャッタ装置16は、上述のように、本体34、空洞部36と、シャッタユニット42と、シャッタ44と、超高速シャッタ46とを備え、さらに、チャープ光生成装置14からのパルス光をファイバケーブル18を介して受光するファイバ結合用レンズ80と、該ファイバ結合用レンズ80により受光されたパルス光を超高速シャッタ46に供給する導光ファイバ82と、上位制御装置24からの測定開始指示を受信するI/F76と、シャッタ44による先幕48及び後幕50(図2参照)の開閉動作を制御するシャッタ開閉制御部78とを備える。
【0042】
また、シャッタ装置16は、上位制御装置24からの測定開始指示を受信するI/F76と、該I/F76により受信された前記測定開始指示に基づいてシャッタユニット42を矢印方向に駆動が自在であるシャッタ切替部(切替手段)84とを備える。
【0043】
三次元形状測定装置12は、該シャッタ44により切り出されたチャープ光パルスを集光する対物レンズ85と、該対物レンズ85により集光されたチャープ光パルスから適切な反射光像を形成する結像光学系86と、該結像光学系86により生成された反射光像を撮像信号に変換するカラー二次元検出器88と、該カラー二次元検出器(三次元情報取得手段、二次元検出器)88により変換された撮像信号を画像処理装置20に送信するI/F90とを備える。
【0044】
この第1の実施形態における三次元形状測定システム10は、基本的には以上のように構成されるものであり、次にその動作について説明する。
【0045】
先ず、ユーザである作業者は、図1に示す三次元形状測定システム10によるワーク30の表面32の三次元形状測定を行うため、上位制御装置24の図示しない操作部から測定モードを設定する。ここで、作業者は、ワーク30の表面32全体の外観を簡易的に測定(スクリーニング)できるように二次元撮像画像を取得する「二次元モード」を設定する。
【0046】
作業者により二次元モードの設定がなされると、図3に示すように、上位制御装置24からの指示がI/F76を介し、シャッタ切替部84により受信される。このシャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間にシャッタ44が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する(図2参照)。
【0047】
続いて、図1に示すように、作業者が上位制御装置24の図示しない操作部から測定開始指示を行うと、三次元形状測定装置12によるワーク30の表面32上の二次元モードでの測定(以下、「二次元測定」という。)が開始される。
【0048】
図3に示すように、ワーク30の表面32上の照射領域54周辺から反射された自然光Nは、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出され、対物レンズ85により集光され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信され、画像処理装置20により所望の画像処理が施され、モニタ22(図1参照)により二次元形状を表す可視画像として表示される。
【0049】
図1に示すように、三次元形状測定装置12により1回の二次元測定(二次元情報取得工程)が完了した後、上位制御装置24の指示を受けたロボット制御装置26は、三次元形状測定装置12及びチャープ光生成装置14が装着されている図示しないロボットのアームを所定の位置・姿勢になるように駆動する。これにより、三次元形状測定装置12の撮像面28がワーク30の表面32側に指向し、表面32の次の測定箇所に照射領域54(図2参照)が設定される。以下、三次元形状測定装置12による二次元測定と、ロボット制御装置26による測定箇所の設定とを繰り返し行う。
【0050】
モニタ22に表示される二次元画像の濃淡の変化等からワーク30の表面32上に塗装欠陥が存在すると疑われる箇所が発見された場合は、その箇所の周辺を詳細に検査するため、作業者は、上位制御装置24の図示しない操作部から測定モードの変更を行う。ここで、作業者は、ワーク30の表面32上の特定箇所を高精度に測定できるように三次元撮像画像を取得する「三次元モード」を設定する。
【0051】
作業者により三次元モードの設定がなされると、図3に示すように、上位制御装置24からの指示がI/F76を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に超高速シャッタ46が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する(図2参照)。
【0052】
続いて、図1に示すように、作業者が上位制御装置24の図示しない操作部から測定開始指示を行うと、三次元形状測定装置12によるワーク30の表面32上の三次元モードでの測定(以下、「三次元測定」という。)が開始される。
【0053】
図3に示すように、上位制御装置24、I/F72、パルス光射出制御部74を介して取得されたパルス射出指示に応じて、パルス光源56からパルス光が射出されると、該パルス光は、ビームスプリッタ58により透過され、チャープ導入装置60によりチャープされ、対物レンズ62によりその光束が集光され、ワーク30の表面32上の照射領域54に照射される。
【0054】
一方、ビームスプリッタ58により反射されたパルス光は、反射ミラー66、68によりさらに反射され、ファイバ結合用レンズ70によりパルス光の光束が集光され、ファイバケーブル18によりシャッタ装置16側に供給され、ファイバ結合用レンズ80により集光され、導光ファイバ82により導光された後に超高速シャッタ46に供給される。励起光としてのパルス光の照射によって、非線形光学材料からなるシャッタ幕52の屈折率が変化するので、超高速シャッタ46はそのシャッタ機能を発揮することができる。
【0055】
ワーク30の表面32上の照射領域54で反射したチャープ光パルスは、超高速シャッタ46への励起光の照射によって所定のタイミングで所定の光量だけ切り出され、対物レンズ85により集光され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信され、画像処理装置20により所望の画像処理が施され、モニタ22により三次元形状を表す可視画像として表示される。
【0056】
なお、チャープ光パルスとともに自然光Nが受光面40を介して受光され得るが、その光量はチャープ光パルスと比して極微量である。
【0057】
この可視画像の階調特性は、X−Y軸平面上の各位置におけるチャープ光パルスの飛行時間の差(Z軸方向の奥行き)が、超高速シャッタ46の開閉動作により同時に切り出された光色(波長)によって表現される。具体的には、前縁である長波長側(赤色)から後縁である短波長側(紫色)まで色が連続的に変化するチャープ光パルスを用いる場合、Z方向の奥行きが大きいX−Y軸平面上の位置において、チャープ光パルスが超高速シャッタ46に到達する時間が遅延する。従って、カラー二次元検出器88では、チャープ光パルスの前縁の方である長波長側の光色が検出される傾向がある。
【0058】
このようにして、ワーク30の表面32上の照射領域54内において三次元形状を測定することができる(三次元情報取得工程)。
【0059】
以上のように、作業者は、ワーク30の表面32全体の外観を撮像領域が比較的広大な二次元測定を用いて簡易的に検査する。作業者は、ワーク30の表面32上に欠陥が存在すると疑われる箇所を発見した場合は、撮像領域が比較的狭い三次元測定を用いてその特定箇所を高精度に検査する。かかる方法を繰り返すことにより、作業者は、ワーク30の表面32全体の三次元形状の外観を効率良く把握することができる。
【0060】
なお、三次元情報合成手段としての画像処理装置20は、二次元画像と三次元画像との測定位置が対応するように2つの画像を合成する機能を備える。これにより、作業者は、ワーク30の表面32全体の三次元形状の外観を視覚的且つ容易に把握することができる。
【0061】
さらに、同様の趣旨により、画像処理装置20は、三次元測定を行った箇所を記憶しておき二次元画像上の当該箇所に相当する位置にマークを付する機能等を備えるようにしてもよい。
【0062】
次いで、本発明に係る三次元形状測定システム10の第1の実施形態の第1変形例について図4及び図5を参照しながら説明する。なお、以下の変形例において第1の実施形態と同一である構成要素には、同一の参照符号を付して詳細な説明を適宜省略する。
【0063】
この第1変形例は、三次元形状測定装置12がシャッタ44を備える点において第1の実施形態と構成が異なる。
【0064】
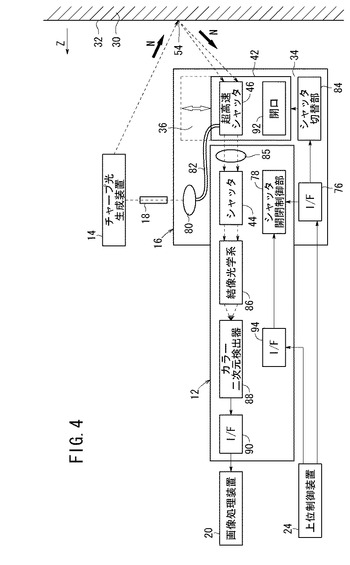
図4は、第1の実施形態の第1変形例における三次元形状測定装置12、チャープ光生成装置14及びシャッタ装置16の構成ブロック図である。図4に示す三次元形状測定装置12は、図3の構成と比較して、シャッタ44と、シャッタ開閉制御部78と、I/F94とをさらに備えている。一方、シャッタ装置16は、図3の構成と比較して、シャッタ44、シャッタ開閉制御部78を備えておらず、また、シャッタ44の配設位置に開口92が設けられている。
【0065】
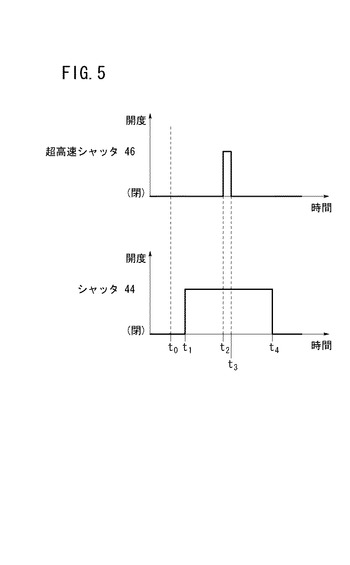
図5は、第1の実施形態の第1変形例に係るシャッタ44及び超高速シャッタ46の開閉タイミングチャートである。グラフの横軸は時間、縦軸はシャッタの開度を表す。破線で示した時点t0は、上位制御装置24からの測定開始指示があった時点を示す。シャッタ44は、時点t1から時点t4まで開かれており、それ以外の時間は閉じられている。超高速シャッタ46は、時点t2から時点t3まで開かれており、それ以外の時間は閉じられている。超高速シャッタ46の開放時間(t2〜t3)はきわめて短く、且つシャッタ44の開放時間(t1〜t4)の範囲に包含されるように設定されている。
【0066】
このように構成しているので、以下に説明するように、第1の実施形態と同様の動作が実現できる。
【0067】
作業者によって二次元モードの設定がなされると、図4に示すように、シャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に開口92が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。このようなシャッタユニット42の配置状態で二次元測定を行うと、照射領域54周辺から反射された自然光Nは、開口92をそのまま通過し、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出される。従って、所望の二次元撮像信号を得ることができる。
【0068】
一方、三次元モードの設定がなされると、シャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に超高速シャッタ46が内挿されるようにシャッタユニット42を矢印方向に駆動制御する。このようなシャッタユニット42の配置状態で三次元測定を行うと、ワーク30の表面32上の照射領域54で反射したチャープ光パルスは、超高速シャッタ46への励起光の照射によって所定のタイミングで所定の光量だけ切り出され、対物レンズ85を通過する。このときシャッタ44は未だ開いたままの状態であるので(図5参照)、超高速シャッタ46により切り出されたすべてのチャープ光パルスはシャッタ44に一切遮断されることなく通過する。従って、所望の三次元撮像信号を得ることができる。
【0069】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。この第1変形例によれば、二次元測定に用いるシャッタ44が三次元形状測定装置12側に設けられているので、シャッタ装置16を取り外した状態でも三次元形状測定装置12を単体で使用できる。さらに、三次元形状測定装置12の設定を一切変更することなく、シャッタ装置16の着脱のみで測定モード(二次元モード・三次元モード)の切替が可能である。
【0070】
次いで、本発明に係る三次元形状測定システムの第1の実施形態の第2変形例について図6及び図7を参照しながら説明する。
【0071】
この第2変形例は、シャッタ装置16、特にシャッタユニット42の内部構成が第1の実施形態と異なる。
【0072】
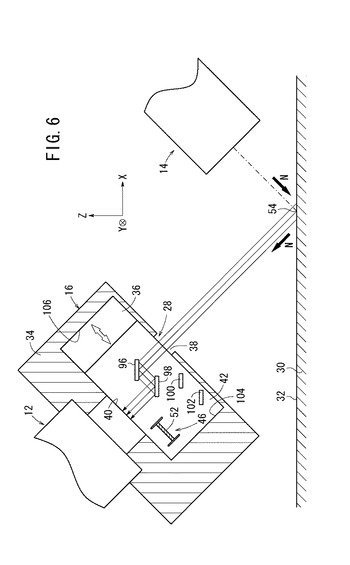
図6に示すように、シャッタユニット42は、反射ミラー96、98、100、102と、超高速シャッタ46とを備える。これらの構成要素はいずれもシャッタユニット42に固定配置されている。開口部38は、三次元形状測定装置12の受光面40と対向する位置から所定の距離だけ離れて設けられている。
【0073】
シャッタ装置16が備えるシャッタユニット42は、照射領域54周辺で反射された自然光Nを取得できるように適切に調整されている。すなわち、シャッタユニット42が白抜矢印方向に駆動され、該シャッタユニット42の一方の外壁が本体34の空洞部36の一方の内壁104に接触するとき、開口部38、反射ミラー96、98、及び受光面40は適切な位置関係となるように配置されている。かかる場合、ワーク30の表面32上の照射領域54周辺で反射された自然光Nは、開口部38から入射され、反射ミラー96、98により所定の角度だけ反射され、受光面40に受光される。
【0074】
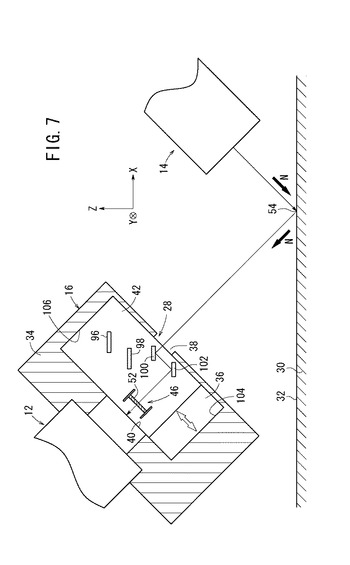
図7に示すように、シャッタ装置16が備えるシャッタユニット42は、照射領域54で反射されたチャープ光パルスを取得できるように適切に調整されている。すなわち、すなわち、シャッタユニット42が白抜矢印方向に駆動され、該シャッタユニット42の他方の外壁が本体34の空洞部36の他方の内壁106に接触するとき、開口部38、反射ミラー100、102、及び受光面40は適切な位置関係となるように配置されている。かかる場合、ワーク30の表面32上で反射されたチャープ光パルスは、開口部38から入射され、反射ミラー100、102により所定の角度だけ反射され、受光面40に受光される。
【0075】
このように、測定モードあるいは撮像に用いる光の種類に応じて、三次元形状測定装置12が取得する光の光路の一部を変更することで、第1の実施形態と同様の作用効果を得ることができる。
【0076】
次いで、本発明に係る三次元形状測定システムの第2の実施形態について図8及び図9を参照しながら説明する。以下の実施形態において第1の実施形態と同一である構成要素には、同一の参照符号を付して詳細な説明を適宜省略する。
【0077】
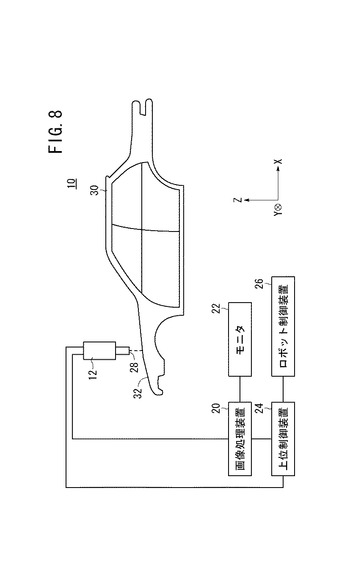
図8は、第2の実施形態における三次元形状測定システム10の概略側面図である。
【0078】
三次元形状測定システム10は、三次元形状測定装置12と、画像処理装置20と、モニタ22と、上位制御装置24と、ロボット制御装置26とを備える。ここで、三次元形状測定装置12には、図1に示すチャープ光生成装置14及びシャッタ装置16に相当する機能が一体的に組み込まれている点で第1の実施形態とは構成が異なる。
【0079】
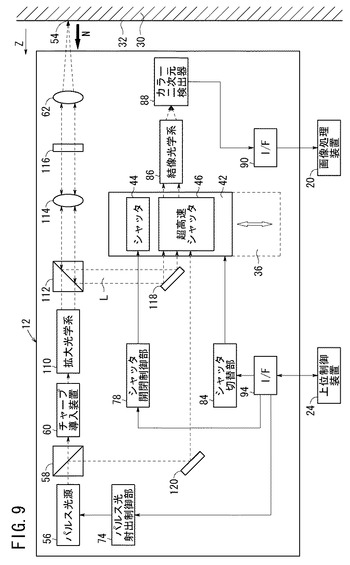
図9は、第2の実施形態における三次元形状測定装置12の構成ブロック図である。
【0080】
この三次元形状測定装置12は、パルス光を射出するパルス光源56と、該パルス光源56により射出されたパルス光をチャープすることでチャープ光パルスを生成するチャープ導入装置60と、該チャープ導入装置60により生成されたチャープ光パルスのビーム径を拡大する拡大光学系110と、拡大光学系110によりビーム径が拡大されたチャープ光パルスを偏光方向に応じて分割する偏光ビームスプリッタ112と、該偏光ビームスプリッタ112を透過された前記チャープ光パルスを平行化するコリメートレンズ114と、該コリメートレンズ114により平行化されたチャープ光パルスの偏光方向を所定の方向に傾けるλ/4波長板116と、該λ/4波長板116により偏光されたチャープ光パルスの光束を集光してワーク30の表面32上に焦点像(照射領域54)を形成する対物レンズ62とを備える。
【0081】
また、光路L上に、偏光ビームスプリッタ112からの反射光を所定の角度方向に反射する反射ミラー118と、該反射ミラー118により反射された反射光を切り出し可能なシャッタユニット42と、該シャッタユニット42により切り出された反射光から適切な反射光像を形成する結像光学系86と、該結像光学系86により生成された反射光像を撮像信号に変換するカラー二次元検出器88と、該カラー二次元検出器88により変換された撮像信号を画像処理装置20に送信するI/F90とを備える。なお、このシャッタユニット42は、図2に示す構成と同様であるため、詳細な説明は割愛する。
【0082】
さらに、この三次元形状測定装置12は、パルス光源56によるパルス光の射出動作を制御するパルス光射出制御部74と、シャッタ44の図示しないシャッタ幕の開閉動作を制御するシャッタ開閉制御部78と、シャッタ切替部84とを備える。
【0083】
この第2の実施形態に係る三次元形状測定システム10は、基本的には以上のように構成されるものであり、次にその動作について説明する。
【0084】
第2の実施形態に係る三次元形状測定システム10による動作手順は、第1の実施形態における上述した動作手順と同様である。ここでは、二次元測定及び三次元測定での撮像画像を取得する方法について、図9を参照しながら詳細に説明する。
【0085】
作業者により二次元モードの設定がなされると、上位制御装置24からの指示がI/F94を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、反射ミラー118と結像光学系86との間にシャッタ44が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。その後、測定開始指示に応じて二次元測定が開始される。
【0086】
照射領域54周辺から反射された自然光Nは、対物レンズ62により集光され、λ/4波長板116により円偏光から直線偏光とされ、コリメートレンズ114により平行化され、偏光ビームスプリッタ112により光路L方向に反射され、反射ミラー118により所定の角度方向に反射され、シャッタ44により所定のタイミングで所定の光量だけ切り出され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信される。
【0087】
作業者により三次元モードの設定がなされると、上位制御装置24からの指示がI/F94を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、反射ミラー118と結像光学系86との間に超高速シャッタ46が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。その後、測定開始指示に応じて三次元測定が開始される。
【0088】
上位制御装置24、I/F94、パルス光射出制御部74を介して取得されたパルス射出指示に応じて、パルス光源56からパルス光が射出されると、該パルス光は、ビームスプリッタ58により透過され、チャープ導入装置60によりチャープされ、拡大光学系110によりビーム径が拡大され、偏光ビームスプリッタ112により透過され、コリメートレンズ114により平行化され、λ/4波長板116により直線偏光から円偏光とされ、対物レンズ62によりその光束が集光され、ワーク30の表面32上の照射領域54に照射される。
【0089】
続いて、ワーク30の表面32上の照射領域54で反射されたチャープ光パルスは、対物レンズ62により集光され、λ/4波長板116により円偏光から直線偏光とされ、コリメートレンズ114により平行化され、偏光ビームスプリッタ112により光路L方向に反射され、反射ミラー118により所定の角度方向に反射され、超高速シャッタ46により所定のタイミングで所定の光量だけ切り出され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信される。
【0090】
なお、ビームスプリッタ58により反射されたパルス光は、反射ミラー120により反射され、超高速シャッタ46側に供給される。超高速シャッタ46は、励起光としての前記パルス光の照射によって開閉される。
【0091】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。第2の実施形態に係る三次元形状測定システム10は、第1の実施形態に係る三次元形状測定システム10と比較して構成が容易であり、省スペース化が可能となるので好ましい。
【0092】
次いで、本発明に係る三次元形状測定システムの第2の実施形態の変形例について図10及び図11を参照しながら説明する。
【0093】
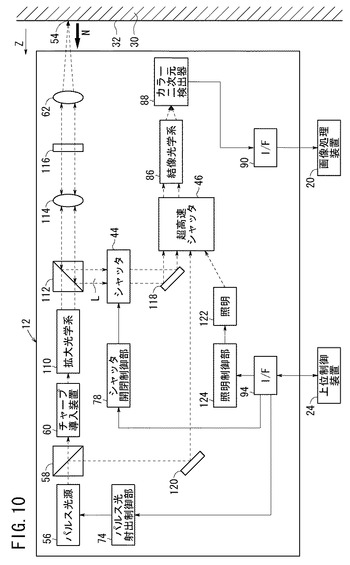
この変形例は、シャッタ44及び超高速シャッタ46が同一光路L上に配設されている点において第2の実施形態と構成が異なる。
【0094】
図10は、第2の実施形態の変形例における三次元形状測定装置12の構成ブロック図である。図10に示す三次元形状測定装置12は、図9の構成と比較して、シャッタ44又は超高速シャッタ46を切替可能なシャッタユニット42に代替して、シャッタ44及び超高速シャッタ46が同一光路L上にそれぞれ配設されている。さらに、超高速シャッタ46に励起光を供給する照明122と、該照明122の点灯・消灯を制御する照明制御部124とを備えている。
【0095】
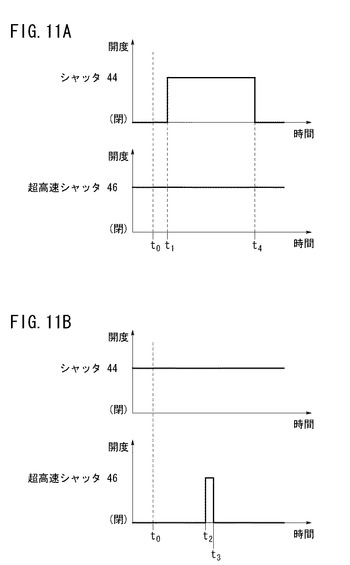
図11Aは、第2の実施形態の変形例におけるシャッタ44及び超高速シャッタ46の開閉タイミングチャートの一例である。グラフの定義は、図5と同様であるため詳細な説明は割愛する。シャッタ44は、時点t1から時点t4まで開かれており、それ以外の時間は閉じられている。一方、上位制御装置24からの照明点灯指示に基づき照明122が点灯させられ、この照明122からの励起光が超高速シャッタ46に照射され続けるので、超高速シャッタ46は常時開いた状態になっている。
【0096】
図11Bは、第2の実施形態の変形例におけるシャッタ44及び超高速シャッタ46の開閉タイミングチャートの一例である。超高速シャッタ46は、時点t2から時点t3まで開かれており、それ以外の時間は閉じられている。一方、上位制御装置24からのシャッタ開放指示に基づいて、シャッタ44は常時開いた状態になっている。
【0097】
このように構成しているので、以下に説明するように、第2の実施形態と同様の動作が実現できる。
【0098】
図10に示すシャッタ44及び超高速シャッタ46の配置構成で、且つ図11Aに示す開閉タイミング制御で二次元測定を行うと、図10に示すように、偏光ビームスプリッタ112により光路L上に反射された自然光Nは、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出され、反射ミラー118により反射され、常時開いた状態である超高速シャッタ46(図11A参照)に一切遮断されることなくすべて通過する。従って、所望の二次元撮像信号を得ることができる。
【0099】
一方、図10に示すシャッタ44及び超高速シャッタ46の配置構成で、且つ図11Bに示す開閉タイミング制御で三次元測定を行うと、図10に示すように、偏光ビームスプリッタ112により光路L上に反射されたチャープ光パルスは、常時開いた状態であるシャッタ44(図11B参照)に遮断されることなくすべて通過し、反射ミラー118により反射され、超高速シャッタ46により所定のタイミングで所定の光量だけ切り出される。従って、所望の三次元撮像信号を得ることができる。
【0100】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。この変形例によれば、第2の実施形態に係る三次元形状測定システム10と比較して、シャッタ切替の機構及び動作が不要となるので好ましい。
【0101】
なお、この発明は、上述した実施形態に限定されるものではなく、この発明の主旨を逸脱しない範囲で自由に変更できることは勿論である。
【0102】
例えば、本実施形態では、自然光Nがワーク30の表面32で反射され、その反射光像を三次元形状測定装置12で撮像する構成を採っているが、補助光を用いてもよいし、自ら発光する被測定物の光像を三次元形状測定装置12で撮像してもよい。
【0103】
また、本実施形態では、自然光N及びチャープ光パルスの取得光路を共通に設けているが、異なる光路を設けるように構成してもよい。さらに、測定モードの変更に応じて、三次元形状測定装置12の構成要素を自動的に付加、退避させ、又は置換させてもよい。例えば、二次元モードの際に、図9におけるλ/4波長板116を光路上から退避させ、且つ偏光ビームスプリッタ112を反射ミラーに置き換えることができる。
【0104】
さらに、三次元形状の測定に用いられるチャープ光パルスは、可視領域の光波長に限定されることなく、紫外線や赤外線等を用いてもよい。
【符号の説明】
【0105】
10…三次元形状測定システム 12…三次元形状測定装置
14…チャープ光生成装置 16…シャッタ装置
20…画像処理装置 28…撮像面
30…ワーク 32…表面
34…本体 36…空洞部
38…開口部 40…受光面
42…シャッタユニット 44…シャッタ
46…超高速シャッタ 54…照射領域
56…パルス光源 58…ビームスプリッタ
60…チャープ導入装置 62、85…対物レンズ
66、68、96、98、100、102、118、120…反射ミラー
72、76、90、94…I/F 78…シャッタ開閉制御部
84…シャッタ切替部 86…結像光学系
88…カラー二次元検出器 92…開口
110…拡大光学系 112…偏光ビームスプリッタ
114…コリメートレンズ 116…λ/4波長板
122…照明 124…照明制御部
【技術分野】
【0001】
本発明は、被測定物の三次元形状を測定する三次元形状測定システム及び三次元形状測定方法に関する。
【背景技術】
【0002】
被測定物の三次元形状、例えばワークの塗装面等の表面欠陥やその平滑さを測定する方法の一つとして、パルス光を用いたTOF(Time of Flight)法が挙げられる。
【0003】
パルス光を用いたTOF法とは、パルス光源から照射されたパルス光が、被測定物の表面の照射領域で反射され、検出器により検出されるまでの飛行時間(TOF)と光速度とから、奥行き方向の距離差として換算し、物体の三次元形状を測定するものである。
【0004】
例えば、特許文献1には、波長が規則的に経時変化するパルス光(いわゆるチャープ光パルス)を用い、三次元情報を二次元画像である色付き等高線マップに変換して検出する技術が開示されている。このように構成すれば、被測定物の三次元形状を高精度且つ高速で測定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2500379号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された装置を用いることにより被測定物の三次元形状を高精度に測定できる反面、その測定精度を確保するために、パルス光の照射領域(面積)を狭小の空間内に設定する必要がある。このため、以下のような測定上の不都合が生じ得る。
【0007】
例えば、ワークの塗装面等の表面欠陥の有無について検査する場合、通常は欠陥が全く存在しないか、ごく稀に欠陥が存在する程度である。このとき、上述の装置を用いて三次元形状の測定を行うと、検査時間が膨大となり効率が悪い。
【0008】
本発明は上記した問題を解決するためになされたもので、被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1記載の発明に係る三次元形状測定システムは、色が規則的に変化する光パルスを生成する光パルス生成手段と、前記光パルス生成手段により生成された前記光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、前記反射光像取得手段により取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記被測定物の二次元情報を取得する二次元検出器と、を有することを特徴とする。
【0010】
請求項1記載の発明によれば、被測定物の二次元情報を取得する二次元検出器を設けたので、被測定物の二次元情報をあわせて取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0011】
請求項2記載の発明に係る三次元形状測定システムは、被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得する第1の反射光像取得手段と、色が規則的に変化する光パルスを生成する光パルス生成手段と、前記光パルス生成手段により生成された前記光パルスを前記被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得する第2の反射光像取得手段と、前記第1の反射光像取得手段により取得された前記第1反射光像の二次元情報、又は前記第2の反射光像取得手段により取得された前記第2反射光像の二次元情報を取得する二次元検出器と、前記二次元検出器により取得された前記第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記第1又は前記第2の反射光像取得手段の切替を行う切替手段と、を有することを特徴とする。
【0012】
ここで、「被測定物の二次元情報を取得するための光」とは、被測定物の表面を表す平面画像を取得するために不可欠な光であり、自然光のみならず、蛍光灯・発光ダイオード・レーザ光等の人工的な照明光をも含む。従って、「被測定物の二次元情報を取得するための光」には、被測定物の三次元情報を取得するために調製された光、例えば、チャープ光やスリット光は含まれない。
【0013】
請求項2記載の発明によれば、第1又は第2の反射光像取得手段の切替を行う切替手段を設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0014】
請求項3記載の発明に係る三次元形状測定システムは、請求項1又は2に記載の三次元形状測定システムにおいて、前記三次元情報取得手段により取得された前記被測定物の三次元情報と前記二次元検出器により取得された前記被測定物の二次元情報とを合成する三次元情報合成手段を有することを特徴とする。
【0015】
請求項3記載の発明によれば、被測定物の三次元情報と二次元情報とを合成する三次元情報合成手段を設けたので、被測定物の三次元形状の外観を視覚的且つ容易に把握することができる。
【0016】
請求項4記載の発明に係る三次元形状測定方法は、被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得し、該第1反射光像の二次元情報を取得する二次元情報取得工程と、色が規則的に変化する光パルスを生成し、該光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程と、を有し、前記二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して前記三次元情報取得工程を行う工程を備えることを特徴とする。
【0017】
請求項4記載の発明によれば、取得された二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して三次元情報取得工程を行う工程を設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【発明の効果】
【0018】
本発明に係る三次元形状測定システムによれば、色が規則的に変化する光パルスを生成する光パルス生成手段と、生成された前記光パルスを被測定物に照射し、前記被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、前記被測定物の二次元情報を取得する二次元検出器とを設けたので、被測定物の二次元情報をあわせて取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0019】
また、本発明に係る三次元形状測定システムによれば、被測定物から反射された光の第1反射光像を取得する第1の反射光像取得手段と、前記被測定物から反射された、色が規則的に変化する光パルスの第2反射光像を取得する第2の反射光像取得手段との切替を行う切替手段とを設けたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【0020】
さらに、本発明に係る三次元形状測定方法によれば、被測定物から反射された光の第1反射光像の二次元情報を取得する二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、色が規則的に変化する光パルスを前記所定の箇所に照射し、該所定の箇所から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程を行うようにしたので、被測定物の二次元情報と三次元画像とを選択的に取得可能であり、被測定物の三次元形状の外観を効率良く把握できる。
【図面の簡単な説明】
【0021】
【図1】第1の実施形態における三次元形状測定システムの概略側面図である。
【図2】第1の実施形態におけるシャッタ装置の概略断面図である。
【図3】第1の実施形態における三次元形状測定装置、チャープ光生成装置及びシャッタ装置の構成ブロック図である。
【図4】第1の実施形態の第1変形例における三次元形状測定装置、チャープ光生成装置及びシャッタ装置の構成ブロック図である。
【図5】第1の実施形態の第1変形例におけるシャッタ及び超高速シャッタの開閉タイミングチャートである。
【図6】第1の実施形態の第2変形例におけるシャッタ装置の概略断面図である。
【図7】第1の実施形態の第2変形例におけるシャッタ装置の概略断面図である。
【図8】第2の実施形態における三次元形状測定システムの概略側面図である。
【図9】第2の実施形態における三次元形状測定装置の構成ブロック図である。
【図10】第2の実施形態の変形例における三次元形状測定装置の構成ブロック図である。
【図11】図11A及び図11Bは、第2の実施形態の変形例におけるシャッタ及び超高速シャッタの開閉タイミングチャートである。
【発明を実施するための形態】
【0022】
以下、本発明に係る三次元形状測定システムについて好適な実施形態を挙げ、添付の図面を参照して詳細に説明する。
【0023】
先ず、本発明に係る三次元形状測定システムの第1の実施形態について図1〜図3を参照しながら説明する。
【0024】
図1は、第1の実施形態における三次元形状測定システム10の概略側面図である。
【0025】
この三次元形状測定システム10は、三次元形状測定装置12と、チャープ光生成装置14と、シャッタ装置16と、ファイバケーブル18と、画像処理装置20と、モニタ22と、上位制御装置24と、ロボット制御装置26とを備える。
【0026】
三次元形状測定装置12の撮像面28は、被測定物としてのワーク30の表面32側を指向する。また、三次元形状測定装置12は、図示しないロボットのアームに装着されているので、前記ロボット制御装置26による制御下に前記ロボットのアームの駆動に従って上下・左右方向に移動が自在である。
【0027】
チャープ光生成装置14は、三次元形状測定装置12と同様に、ワーク30の表面32側を指向し、図示しないロボットのアームに装着されている。また、チャープ光生成装置14の指向方向とワーク30の表面32の法線方向とのなす角は、三次元形状測定装置12の指向方向と前記法線方向とのなす角と同一である位置関係にある。
【0028】
シャッタ装置16は、三次元形状測定装置12に装着されており着脱が自在である。また、シャッタ装置16は、チャープ光生成装置14とファイバケーブル18を介して光学的に接続されている。
【0029】
画像処理装置20は、三次元形状測定装置12に電気的に接続されており、三次元形状測定装置12から供給される撮像信号に対して種々の画像処理を行う。上位制御装置24は、三次元形状測定装置12、チャープ光生成装置14、シャッタ装置16、画像処理装置20や、図示しないロボットの駆動制御を行うロボット制御装置26に対して各種の指示を送信する。また、上位制御装置24が備える図示しない操作部から測定モード(後述する二次元モード又は三次元モード)を設定可能である。
【0030】
図2は、第1の実施形態におけるシャッタ装置16の概略断面図である。
【0031】
この三次元形状測定装置12の先端部に嵌合されているシャッタ装置16は、直方体状の本体34を有している。この本体34の内部には直方体状の空洞部36が設けられており、この空洞部36は、本体34の一方の側面に設けられている開口部38を介して外部と連通する。開口部38は、三次元形状測定装置12の受光面40と対向する位置関係にある。
【0032】
空洞部36内にはシャッタユニット(反射光像取得手段)42が設けられており、該シャッタユニット42は図示しない駆動機構により白抜矢印方向に移動が自在である。
【0033】
機械式又は電子式のシャッタ(第1の反射光像取得手段)44は、遮光性を有する金属等からなる先幕48と後幕50とを備える。先幕48と後幕50は、後述するシャッタ開閉制御部の制御下にそれぞれ独立にY軸方向に移動(開閉)が自在である。
【0034】
非線形光学シャッタ等から構成される超高速シャッタ(第2の反射光像取得手段)46は、非線形光学材料からなるシャッタ幕52を備える。シャッタ幕52は、励起光の照射によって屈折率が変化する物性を有する。例えば、カー効果を利用するシャッタ(カーシャッタ)の場合は、非線形光学材料を透過する光の偏光状態を変化させることができる。
【0035】
チャープ光生成装置14から射出される後述するチャープ光パルスは、ワーク30の表面32上の照射領域54に照射され、ワーク30の表面32上で反射され、三次元形状測定装置12の撮像面28に臨む。
【0036】
ワーク30の二次元情報を取得するための光としての自然光Nは、ワーク30の表面32上に種々の角度方向から入射又は反射されている。
【0037】
図3は、第1の実施形態における三次元形状測定装置12、チャープ光生成装置14及びシャッタ装置16の構成ブロック図である。
【0038】
このチャープ光生成装置14は、パルス光を射出するパルス光源56と、該パルス光源56により射出されたパルス光を分割するビームスプリッタ58と、該ビームスプリッタ58を透過されたパルス光をチャープすることでチャープ光パルスを生成するチャープ導入装置60と、該チャープ導入装置60により生成されたチャープ光パルスの光束を集光してワーク30の表面32上に焦点像(照射領域54)を形成する対物レンズ62とを備える。なお、色が規則的に変化する光パルスを生成する光パルス生成手段は、パルス光源56とチャープ導入装置60とから構成される。
【0039】
また、チャープ光生成装置14は、ビームスプリッタ58により反射されたパルス光を所定の角度方向に反射する反射ミラー66、68と、該反射ミラー66、68からの反射光をファイバケーブル18を介して三次元形状測定装置12に伝送するファイバ結合用レンズ70とを備える。
【0040】
さらに、チャープ光生成装置14は、上位制御装置24からの測定開始指示を受信するI/F72と、該I/F72により受信された測定開始指示に基づいてパルス光源56のパルス光の射出を制御するパルス光射出制御部74とを備える。
【0041】
シャッタ装置16は、上述のように、本体34、空洞部36と、シャッタユニット42と、シャッタ44と、超高速シャッタ46とを備え、さらに、チャープ光生成装置14からのパルス光をファイバケーブル18を介して受光するファイバ結合用レンズ80と、該ファイバ結合用レンズ80により受光されたパルス光を超高速シャッタ46に供給する導光ファイバ82と、上位制御装置24からの測定開始指示を受信するI/F76と、シャッタ44による先幕48及び後幕50(図2参照)の開閉動作を制御するシャッタ開閉制御部78とを備える。
【0042】
また、シャッタ装置16は、上位制御装置24からの測定開始指示を受信するI/F76と、該I/F76により受信された前記測定開始指示に基づいてシャッタユニット42を矢印方向に駆動が自在であるシャッタ切替部(切替手段)84とを備える。
【0043】
三次元形状測定装置12は、該シャッタ44により切り出されたチャープ光パルスを集光する対物レンズ85と、該対物レンズ85により集光されたチャープ光パルスから適切な反射光像を形成する結像光学系86と、該結像光学系86により生成された反射光像を撮像信号に変換するカラー二次元検出器88と、該カラー二次元検出器(三次元情報取得手段、二次元検出器)88により変換された撮像信号を画像処理装置20に送信するI/F90とを備える。
【0044】
この第1の実施形態における三次元形状測定システム10は、基本的には以上のように構成されるものであり、次にその動作について説明する。
【0045】
先ず、ユーザである作業者は、図1に示す三次元形状測定システム10によるワーク30の表面32の三次元形状測定を行うため、上位制御装置24の図示しない操作部から測定モードを設定する。ここで、作業者は、ワーク30の表面32全体の外観を簡易的に測定(スクリーニング)できるように二次元撮像画像を取得する「二次元モード」を設定する。
【0046】
作業者により二次元モードの設定がなされると、図3に示すように、上位制御装置24からの指示がI/F76を介し、シャッタ切替部84により受信される。このシャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間にシャッタ44が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する(図2参照)。
【0047】
続いて、図1に示すように、作業者が上位制御装置24の図示しない操作部から測定開始指示を行うと、三次元形状測定装置12によるワーク30の表面32上の二次元モードでの測定(以下、「二次元測定」という。)が開始される。
【0048】
図3に示すように、ワーク30の表面32上の照射領域54周辺から反射された自然光Nは、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出され、対物レンズ85により集光され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信され、画像処理装置20により所望の画像処理が施され、モニタ22(図1参照)により二次元形状を表す可視画像として表示される。
【0049】
図1に示すように、三次元形状測定装置12により1回の二次元測定(二次元情報取得工程)が完了した後、上位制御装置24の指示を受けたロボット制御装置26は、三次元形状測定装置12及びチャープ光生成装置14が装着されている図示しないロボットのアームを所定の位置・姿勢になるように駆動する。これにより、三次元形状測定装置12の撮像面28がワーク30の表面32側に指向し、表面32の次の測定箇所に照射領域54(図2参照)が設定される。以下、三次元形状測定装置12による二次元測定と、ロボット制御装置26による測定箇所の設定とを繰り返し行う。
【0050】
モニタ22に表示される二次元画像の濃淡の変化等からワーク30の表面32上に塗装欠陥が存在すると疑われる箇所が発見された場合は、その箇所の周辺を詳細に検査するため、作業者は、上位制御装置24の図示しない操作部から測定モードの変更を行う。ここで、作業者は、ワーク30の表面32上の特定箇所を高精度に測定できるように三次元撮像画像を取得する「三次元モード」を設定する。
【0051】
作業者により三次元モードの設定がなされると、図3に示すように、上位制御装置24からの指示がI/F76を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に超高速シャッタ46が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する(図2参照)。
【0052】
続いて、図1に示すように、作業者が上位制御装置24の図示しない操作部から測定開始指示を行うと、三次元形状測定装置12によるワーク30の表面32上の三次元モードでの測定(以下、「三次元測定」という。)が開始される。
【0053】
図3に示すように、上位制御装置24、I/F72、パルス光射出制御部74を介して取得されたパルス射出指示に応じて、パルス光源56からパルス光が射出されると、該パルス光は、ビームスプリッタ58により透過され、チャープ導入装置60によりチャープされ、対物レンズ62によりその光束が集光され、ワーク30の表面32上の照射領域54に照射される。
【0054】
一方、ビームスプリッタ58により反射されたパルス光は、反射ミラー66、68によりさらに反射され、ファイバ結合用レンズ70によりパルス光の光束が集光され、ファイバケーブル18によりシャッタ装置16側に供給され、ファイバ結合用レンズ80により集光され、導光ファイバ82により導光された後に超高速シャッタ46に供給される。励起光としてのパルス光の照射によって、非線形光学材料からなるシャッタ幕52の屈折率が変化するので、超高速シャッタ46はそのシャッタ機能を発揮することができる。
【0055】
ワーク30の表面32上の照射領域54で反射したチャープ光パルスは、超高速シャッタ46への励起光の照射によって所定のタイミングで所定の光量だけ切り出され、対物レンズ85により集光され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信され、画像処理装置20により所望の画像処理が施され、モニタ22により三次元形状を表す可視画像として表示される。
【0056】
なお、チャープ光パルスとともに自然光Nが受光面40を介して受光され得るが、その光量はチャープ光パルスと比して極微量である。
【0057】
この可視画像の階調特性は、X−Y軸平面上の各位置におけるチャープ光パルスの飛行時間の差(Z軸方向の奥行き)が、超高速シャッタ46の開閉動作により同時に切り出された光色(波長)によって表現される。具体的には、前縁である長波長側(赤色)から後縁である短波長側(紫色)まで色が連続的に変化するチャープ光パルスを用いる場合、Z方向の奥行きが大きいX−Y軸平面上の位置において、チャープ光パルスが超高速シャッタ46に到達する時間が遅延する。従って、カラー二次元検出器88では、チャープ光パルスの前縁の方である長波長側の光色が検出される傾向がある。
【0058】
このようにして、ワーク30の表面32上の照射領域54内において三次元形状を測定することができる(三次元情報取得工程)。
【0059】
以上のように、作業者は、ワーク30の表面32全体の外観を撮像領域が比較的広大な二次元測定を用いて簡易的に検査する。作業者は、ワーク30の表面32上に欠陥が存在すると疑われる箇所を発見した場合は、撮像領域が比較的狭い三次元測定を用いてその特定箇所を高精度に検査する。かかる方法を繰り返すことにより、作業者は、ワーク30の表面32全体の三次元形状の外観を効率良く把握することができる。
【0060】
なお、三次元情報合成手段としての画像処理装置20は、二次元画像と三次元画像との測定位置が対応するように2つの画像を合成する機能を備える。これにより、作業者は、ワーク30の表面32全体の三次元形状の外観を視覚的且つ容易に把握することができる。
【0061】
さらに、同様の趣旨により、画像処理装置20は、三次元測定を行った箇所を記憶しておき二次元画像上の当該箇所に相当する位置にマークを付する機能等を備えるようにしてもよい。
【0062】
次いで、本発明に係る三次元形状測定システム10の第1の実施形態の第1変形例について図4及び図5を参照しながら説明する。なお、以下の変形例において第1の実施形態と同一である構成要素には、同一の参照符号を付して詳細な説明を適宜省略する。
【0063】
この第1変形例は、三次元形状測定装置12がシャッタ44を備える点において第1の実施形態と構成が異なる。
【0064】
図4は、第1の実施形態の第1変形例における三次元形状測定装置12、チャープ光生成装置14及びシャッタ装置16の構成ブロック図である。図4に示す三次元形状測定装置12は、図3の構成と比較して、シャッタ44と、シャッタ開閉制御部78と、I/F94とをさらに備えている。一方、シャッタ装置16は、図3の構成と比較して、シャッタ44、シャッタ開閉制御部78を備えておらず、また、シャッタ44の配設位置に開口92が設けられている。
【0065】
図5は、第1の実施形態の第1変形例に係るシャッタ44及び超高速シャッタ46の開閉タイミングチャートである。グラフの横軸は時間、縦軸はシャッタの開度を表す。破線で示した時点t0は、上位制御装置24からの測定開始指示があった時点を示す。シャッタ44は、時点t1から時点t4まで開かれており、それ以外の時間は閉じられている。超高速シャッタ46は、時点t2から時点t3まで開かれており、それ以外の時間は閉じられている。超高速シャッタ46の開放時間(t2〜t3)はきわめて短く、且つシャッタ44の開放時間(t1〜t4)の範囲に包含されるように設定されている。
【0066】
このように構成しているので、以下に説明するように、第1の実施形態と同様の動作が実現できる。
【0067】
作業者によって二次元モードの設定がなされると、図4に示すように、シャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に開口92が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。このようなシャッタユニット42の配置状態で二次元測定を行うと、照射領域54周辺から反射された自然光Nは、開口92をそのまま通過し、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出される。従って、所望の二次元撮像信号を得ることができる。
【0068】
一方、三次元モードの設定がなされると、シャッタ切替部84は、照射領域54と三次元形状測定装置12の受光面40との間に超高速シャッタ46が内挿されるようにシャッタユニット42を矢印方向に駆動制御する。このようなシャッタユニット42の配置状態で三次元測定を行うと、ワーク30の表面32上の照射領域54で反射したチャープ光パルスは、超高速シャッタ46への励起光の照射によって所定のタイミングで所定の光量だけ切り出され、対物レンズ85を通過する。このときシャッタ44は未だ開いたままの状態であるので(図5参照)、超高速シャッタ46により切り出されたすべてのチャープ光パルスはシャッタ44に一切遮断されることなく通過する。従って、所望の三次元撮像信号を得ることができる。
【0069】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。この第1変形例によれば、二次元測定に用いるシャッタ44が三次元形状測定装置12側に設けられているので、シャッタ装置16を取り外した状態でも三次元形状測定装置12を単体で使用できる。さらに、三次元形状測定装置12の設定を一切変更することなく、シャッタ装置16の着脱のみで測定モード(二次元モード・三次元モード)の切替が可能である。
【0070】
次いで、本発明に係る三次元形状測定システムの第1の実施形態の第2変形例について図6及び図7を参照しながら説明する。
【0071】
この第2変形例は、シャッタ装置16、特にシャッタユニット42の内部構成が第1の実施形態と異なる。
【0072】
図6に示すように、シャッタユニット42は、反射ミラー96、98、100、102と、超高速シャッタ46とを備える。これらの構成要素はいずれもシャッタユニット42に固定配置されている。開口部38は、三次元形状測定装置12の受光面40と対向する位置から所定の距離だけ離れて設けられている。
【0073】
シャッタ装置16が備えるシャッタユニット42は、照射領域54周辺で反射された自然光Nを取得できるように適切に調整されている。すなわち、シャッタユニット42が白抜矢印方向に駆動され、該シャッタユニット42の一方の外壁が本体34の空洞部36の一方の内壁104に接触するとき、開口部38、反射ミラー96、98、及び受光面40は適切な位置関係となるように配置されている。かかる場合、ワーク30の表面32上の照射領域54周辺で反射された自然光Nは、開口部38から入射され、反射ミラー96、98により所定の角度だけ反射され、受光面40に受光される。
【0074】
図7に示すように、シャッタ装置16が備えるシャッタユニット42は、照射領域54で反射されたチャープ光パルスを取得できるように適切に調整されている。すなわち、すなわち、シャッタユニット42が白抜矢印方向に駆動され、該シャッタユニット42の他方の外壁が本体34の空洞部36の他方の内壁106に接触するとき、開口部38、反射ミラー100、102、及び受光面40は適切な位置関係となるように配置されている。かかる場合、ワーク30の表面32上で反射されたチャープ光パルスは、開口部38から入射され、反射ミラー100、102により所定の角度だけ反射され、受光面40に受光される。
【0075】
このように、測定モードあるいは撮像に用いる光の種類に応じて、三次元形状測定装置12が取得する光の光路の一部を変更することで、第1の実施形態と同様の作用効果を得ることができる。
【0076】
次いで、本発明に係る三次元形状測定システムの第2の実施形態について図8及び図9を参照しながら説明する。以下の実施形態において第1の実施形態と同一である構成要素には、同一の参照符号を付して詳細な説明を適宜省略する。
【0077】
図8は、第2の実施形態における三次元形状測定システム10の概略側面図である。
【0078】
三次元形状測定システム10は、三次元形状測定装置12と、画像処理装置20と、モニタ22と、上位制御装置24と、ロボット制御装置26とを備える。ここで、三次元形状測定装置12には、図1に示すチャープ光生成装置14及びシャッタ装置16に相当する機能が一体的に組み込まれている点で第1の実施形態とは構成が異なる。
【0079】
図9は、第2の実施形態における三次元形状測定装置12の構成ブロック図である。
【0080】
この三次元形状測定装置12は、パルス光を射出するパルス光源56と、該パルス光源56により射出されたパルス光をチャープすることでチャープ光パルスを生成するチャープ導入装置60と、該チャープ導入装置60により生成されたチャープ光パルスのビーム径を拡大する拡大光学系110と、拡大光学系110によりビーム径が拡大されたチャープ光パルスを偏光方向に応じて分割する偏光ビームスプリッタ112と、該偏光ビームスプリッタ112を透過された前記チャープ光パルスを平行化するコリメートレンズ114と、該コリメートレンズ114により平行化されたチャープ光パルスの偏光方向を所定の方向に傾けるλ/4波長板116と、該λ/4波長板116により偏光されたチャープ光パルスの光束を集光してワーク30の表面32上に焦点像(照射領域54)を形成する対物レンズ62とを備える。
【0081】
また、光路L上に、偏光ビームスプリッタ112からの反射光を所定の角度方向に反射する反射ミラー118と、該反射ミラー118により反射された反射光を切り出し可能なシャッタユニット42と、該シャッタユニット42により切り出された反射光から適切な反射光像を形成する結像光学系86と、該結像光学系86により生成された反射光像を撮像信号に変換するカラー二次元検出器88と、該カラー二次元検出器88により変換された撮像信号を画像処理装置20に送信するI/F90とを備える。なお、このシャッタユニット42は、図2に示す構成と同様であるため、詳細な説明は割愛する。
【0082】
さらに、この三次元形状測定装置12は、パルス光源56によるパルス光の射出動作を制御するパルス光射出制御部74と、シャッタ44の図示しないシャッタ幕の開閉動作を制御するシャッタ開閉制御部78と、シャッタ切替部84とを備える。
【0083】
この第2の実施形態に係る三次元形状測定システム10は、基本的には以上のように構成されるものであり、次にその動作について説明する。
【0084】
第2の実施形態に係る三次元形状測定システム10による動作手順は、第1の実施形態における上述した動作手順と同様である。ここでは、二次元測定及び三次元測定での撮像画像を取得する方法について、図9を参照しながら詳細に説明する。
【0085】
作業者により二次元モードの設定がなされると、上位制御装置24からの指示がI/F94を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、反射ミラー118と結像光学系86との間にシャッタ44が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。その後、測定開始指示に応じて二次元測定が開始される。
【0086】
照射領域54周辺から反射された自然光Nは、対物レンズ62により集光され、λ/4波長板116により円偏光から直線偏光とされ、コリメートレンズ114により平行化され、偏光ビームスプリッタ112により光路L方向に反射され、反射ミラー118により所定の角度方向に反射され、シャッタ44により所定のタイミングで所定の光量だけ切り出され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信される。
【0087】
作業者により三次元モードの設定がなされると、上位制御装置24からの指示がI/F94を介し、シャッタ切替部84に供給される。このシャッタ切替部84は、反射ミラー118と結像光学系86との間に超高速シャッタ46が内挿されるようにシャッタユニット42を白抜矢印方向に駆動制御する。その後、測定開始指示に応じて三次元測定が開始される。
【0088】
上位制御装置24、I/F94、パルス光射出制御部74を介して取得されたパルス射出指示に応じて、パルス光源56からパルス光が射出されると、該パルス光は、ビームスプリッタ58により透過され、チャープ導入装置60によりチャープされ、拡大光学系110によりビーム径が拡大され、偏光ビームスプリッタ112により透過され、コリメートレンズ114により平行化され、λ/4波長板116により直線偏光から円偏光とされ、対物レンズ62によりその光束が集光され、ワーク30の表面32上の照射領域54に照射される。
【0089】
続いて、ワーク30の表面32上の照射領域54で反射されたチャープ光パルスは、対物レンズ62により集光され、λ/4波長板116により円偏光から直線偏光とされ、コリメートレンズ114により平行化され、偏光ビームスプリッタ112により光路L方向に反射され、反射ミラー118により所定の角度方向に反射され、超高速シャッタ46により所定のタイミングで所定の光量だけ切り出され、結像光学系86により適切な反射光像が形成され、カラー二次元検出器88により撮像信号に変換される。該撮像信号は、I/F90を介し、外部装置である画像処理装置20に送信される。
【0090】
なお、ビームスプリッタ58により反射されたパルス光は、反射ミラー120により反射され、超高速シャッタ46側に供給される。超高速シャッタ46は、励起光としての前記パルス光の照射によって開閉される。
【0091】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。第2の実施形態に係る三次元形状測定システム10は、第1の実施形態に係る三次元形状測定システム10と比較して構成が容易であり、省スペース化が可能となるので好ましい。
【0092】
次いで、本発明に係る三次元形状測定システムの第2の実施形態の変形例について図10及び図11を参照しながら説明する。
【0093】
この変形例は、シャッタ44及び超高速シャッタ46が同一光路L上に配設されている点において第2の実施形態と構成が異なる。
【0094】
図10は、第2の実施形態の変形例における三次元形状測定装置12の構成ブロック図である。図10に示す三次元形状測定装置12は、図9の構成と比較して、シャッタ44又は超高速シャッタ46を切替可能なシャッタユニット42に代替して、シャッタ44及び超高速シャッタ46が同一光路L上にそれぞれ配設されている。さらに、超高速シャッタ46に励起光を供給する照明122と、該照明122の点灯・消灯を制御する照明制御部124とを備えている。
【0095】
図11Aは、第2の実施形態の変形例におけるシャッタ44及び超高速シャッタ46の開閉タイミングチャートの一例である。グラフの定義は、図5と同様であるため詳細な説明は割愛する。シャッタ44は、時点t1から時点t4まで開かれており、それ以外の時間は閉じられている。一方、上位制御装置24からの照明点灯指示に基づき照明122が点灯させられ、この照明122からの励起光が超高速シャッタ46に照射され続けるので、超高速シャッタ46は常時開いた状態になっている。
【0096】
図11Bは、第2の実施形態の変形例におけるシャッタ44及び超高速シャッタ46の開閉タイミングチャートの一例である。超高速シャッタ46は、時点t2から時点t3まで開かれており、それ以外の時間は閉じられている。一方、上位制御装置24からのシャッタ開放指示に基づいて、シャッタ44は常時開いた状態になっている。
【0097】
このように構成しているので、以下に説明するように、第2の実施形態と同様の動作が実現できる。
【0098】
図10に示すシャッタ44及び超高速シャッタ46の配置構成で、且つ図11Aに示す開閉タイミング制御で二次元測定を行うと、図10に示すように、偏光ビームスプリッタ112により光路L上に反射された自然光Nは、シャッタ44の先幕48及び後幕50(図2参照)の開閉動作により、所定のタイミングで所定の光量だけ切り出され、反射ミラー118により反射され、常時開いた状態である超高速シャッタ46(図11A参照)に一切遮断されることなくすべて通過する。従って、所望の二次元撮像信号を得ることができる。
【0099】
一方、図10に示すシャッタ44及び超高速シャッタ46の配置構成で、且つ図11Bに示す開閉タイミング制御で三次元測定を行うと、図10に示すように、偏光ビームスプリッタ112により光路L上に反射されたチャープ光パルスは、常時開いた状態であるシャッタ44(図11B参照)に遮断されることなくすべて通過し、反射ミラー118により反射され、超高速シャッタ46により所定のタイミングで所定の光量だけ切り出される。従って、所望の三次元撮像信号を得ることができる。
【0100】
以上のようにして、ワーク30の表面32上の照射領域54内において二次元又は三次元形状を測定することができる。この変形例によれば、第2の実施形態に係る三次元形状測定システム10と比較して、シャッタ切替の機構及び動作が不要となるので好ましい。
【0101】
なお、この発明は、上述した実施形態に限定されるものではなく、この発明の主旨を逸脱しない範囲で自由に変更できることは勿論である。
【0102】
例えば、本実施形態では、自然光Nがワーク30の表面32で反射され、その反射光像を三次元形状測定装置12で撮像する構成を採っているが、補助光を用いてもよいし、自ら発光する被測定物の光像を三次元形状測定装置12で撮像してもよい。
【0103】
また、本実施形態では、自然光N及びチャープ光パルスの取得光路を共通に設けているが、異なる光路を設けるように構成してもよい。さらに、測定モードの変更に応じて、三次元形状測定装置12の構成要素を自動的に付加、退避させ、又は置換させてもよい。例えば、二次元モードの際に、図9におけるλ/4波長板116を光路上から退避させ、且つ偏光ビームスプリッタ112を反射ミラーに置き換えることができる。
【0104】
さらに、三次元形状の測定に用いられるチャープ光パルスは、可視領域の光波長に限定されることなく、紫外線や赤外線等を用いてもよい。
【符号の説明】
【0105】
10…三次元形状測定システム 12…三次元形状測定装置
14…チャープ光生成装置 16…シャッタ装置
20…画像処理装置 28…撮像面
30…ワーク 32…表面
34…本体 36…空洞部
38…開口部 40…受光面
42…シャッタユニット 44…シャッタ
46…超高速シャッタ 54…照射領域
56…パルス光源 58…ビームスプリッタ
60…チャープ導入装置 62、85…対物レンズ
66、68、96、98、100、102、118、120…反射ミラー
72、76、90、94…I/F 78…シャッタ開閉制御部
84…シャッタ切替部 86…結像光学系
88…カラー二次元検出器 92…開口
110…拡大光学系 112…偏光ビームスプリッタ
114…コリメートレンズ 116…λ/4波長板
122…照明 124…照明制御部
【特許請求の範囲】
【請求項1】
色が規則的に変化する光パルスを生成する光パルス生成手段と、
前記光パルス生成手段により生成された前記光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、
前記反射光像取得手段により取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、
前記被測定物の二次元情報を取得する二次元検出器と、
を有することを特徴とする三次元形状測定システム。
【請求項2】
被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得する第1の反射光像取得手段と、
色が規則的に変化する光パルスを生成する光パルス生成手段と、
前記光パルス生成手段により生成された前記光パルスを前記被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得する第2の反射光像取得手段と、
前記第1の反射光像取得手段により取得された前記第1反射光像の二次元情報、又は前記第2の反射光像取得手段により取得された前記第2反射光像の二次元情報を取得する二次元検出器と、
前記二次元検出器により取得された前記第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、
前記第1又は前記第2の反射光像取得手段の切替を行う切替手段と、
を有することを特徴とする三次元形状測定システム。
【請求項3】
請求項1又は2に記載の三次元形状測定システムにおいて、
前記三次元情報取得手段により取得された前記被測定物の三次元情報と前記二次元検出器により取得された前記被測定物の二次元情報とを合成する三次元情報合成手段を有する
ことを特徴とする三次元形状測定システム。
【請求項4】
被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得し、該第1反射光像の二次元情報を取得する二次元情報取得工程と、
色が規則的に変化する光パルスを生成し、該光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程と、を有し、
前記二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して前記三次元情報取得工程を行う工程を備える
ことを特徴とする三次元形状測定方法。
【請求項1】
色が規則的に変化する光パルスを生成する光パルス生成手段と、
前記光パルス生成手段により生成された前記光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの反射光像を取得する反射光像取得手段と、
前記反射光像取得手段により取得された前記反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、
前記被測定物の二次元情報を取得する二次元検出器と、
を有することを特徴とする三次元形状測定システム。
【請求項2】
被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得する第1の反射光像取得手段と、
色が規則的に変化する光パルスを生成する光パルス生成手段と、
前記光パルス生成手段により生成された前記光パルスを前記被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得する第2の反射光像取得手段と、
前記第1の反射光像取得手段により取得された前記第1反射光像の二次元情報、又は前記第2の反射光像取得手段により取得された前記第2反射光像の二次元情報を取得する二次元検出器と、
前記二次元検出器により取得された前記第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得手段と、
前記第1又は前記第2の反射光像取得手段の切替を行う切替手段と、
を有することを特徴とする三次元形状測定システム。
【請求項3】
請求項1又は2に記載の三次元形状測定システムにおいて、
前記三次元情報取得手段により取得された前記被測定物の三次元情報と前記二次元検出器により取得された前記被測定物の二次元情報とを合成する三次元情報合成手段を有する
ことを特徴とする三次元形状測定システム。
【請求項4】
被測定物の二次元情報を取得するための光を前記被測定物に照射し、該被測定物から反射された前記光の第1反射光像を取得し、該第1反射光像の二次元情報を取得する二次元情報取得工程と、
色が規則的に変化する光パルスを生成し、該光パルスを被測定物に照射し、該被測定物から反射された前記光パルスの第2反射光像を取得し、該第2反射光像の二次元情報及び色情報を用いて前記被測定物の三次元情報を取得する三次元情報取得工程と、を有し、
前記二次元情報取得工程により取得された前記二次元情報に基づいて所定の箇所を選択し、該所定の箇所に対して前記三次元情報取得工程を行う工程を備える
ことを特徴とする三次元形状測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−22034(P2011−22034A)
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2009−168017(P2009−168017)
【出願日】平成21年7月16日(2009.7.16)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成21年7月16日(2009.7.16)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]