
三次元映像獲得装置、及び三次元映像獲得装置における奥行き情報の算出方法
【課題】三次元映像獲得装置、及び三次元映像獲得装置における奥行き情報の算出方法を提供する。
【解決手段】N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備える三次元映像獲得装置である。
【解決手段】N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備える三次元映像獲得装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三次元映像獲得装置、及び前記三次元映像獲得装置における奥行き情報を算出する方法に関する。
【背景技術】
【0002】
最近、奥行きのある映像を表示できる3Dディスプレイ装置の発展及び需要増加と共に、3Dコンテンツの重要性が高くなっている。これによって、一般のユーザが3Dコンテンツを直接制作できる3Dカメラのような三次元映像獲得装置が研究されている。かかる3Dカメラは、一回の撮影で既存の二次元カラー映像情報と共に奥行き情報も得なければならない。
【0003】
被写体の表面と3Dカメラとの距離に関する奥行き情報は、二台のカメラを利用した両眼立体視法や、構造化光とカメラとを利用した三角測量法を利用して得られる。しかし、かかる方法は、被写体の距離が遠くなるほど、奥行き情報についての正確度が急激に低下し、被写体の表面状態に依存的であるので、精密な奥行き情報を得がたい。
【0004】
かかる問題を改善するために、タイム・オブ・フライト(Time-of-Flight: TOF)法が導入された。TOF技術は、照明光を被写体に照射した後、被写体から反射される光が受光部で受光されるまでの光の伝播時間を測定する方法である。TOF技術によれば、発光ダイオード(Light-Emitting Diode: LED)またはレーザーダイオード(Laser Diode: LD)を含む照明光学系を利用して、特定の波長の光(例えば、850nmの近赤外線)を被写体に投射し、被写体から反射された同じ波長の光を受光部で受光した後、奥行き情報を算出するための一連の処理過程を経る。かかる一連の光処理過程によって、多様なTOF技術が紹介されている。
【0005】
しかし、前述したTOF法では、ノイズのない理想的な環境を仮定して、奥行き情報を算出する。しかし、3Dカメラを使用する場合、室内では照明、室外では太陽光などの外光が周辺に常に存在する。かかる外光は、カメラに入射されて、奥行き情報の算出過程でノイズとなる。
【0006】
したがって、奥行き情報の算出過程でノイズとなる外光を除去する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、外光を除去して、奥行き情報を算出する方法及びその三次元映像獲得装置を提供することである。
【課題を解決するための手段】
【0008】
本発明の一実施形態にかかる三次元映像獲得装置は、N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備える。
【0009】
前記N個の光は、不連続的に投射されてもよい。
【0010】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されてもよい。
【0011】
前記光源は、前記N個の光を一定の時間間隔で順次投射してもよい。
【0012】
前記光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されてもよい。
【0013】
前記駆動時間は、前記投射時間より短くてもよい。
【0014】
前記撮像素子の露光時間は、前記駆動時間に同期されてもよい。
【0015】
前記撮像素子は、前記光の投射時間で露光されて、前記変調された光を撮影し、次の投射開始時刻までに前記N個のサブ映像を出力してもよい。
【0016】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されてもよい。
【0017】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であってもよい。
【0018】
前記光変調器は、同じ変調信号で反射光を変調してもよい。
【0019】
前記N個の光は、同じ周期波であってもよい。
【0020】
前記光変調器は、異なる変調信号で反射光を変調してもよい。
【0021】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であってもよい。
【0022】
前記反射された光は、前記N個の光のうち、前記被写体から反射されるN個の反射光を含んでもよい。
【0023】
前記撮像素子で生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされてもよい。
【0024】
前記信号処理部は、前記N個のサブ映像が、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別のN個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせてもよい。
【0025】
前記信号処理部は、前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出してもよい。
【0026】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されてもよい。
【0027】
本発明の他の実施形態にかかる奥行き情報の算出方法は、N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させるステップと、前記変調された光を撮影して、N個のサブ映像を生成するステップと、前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出するステップと、を含む。
【0028】
前記N個の光は、不連続的に投射されてもよい。
【0029】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されてもよい。
【0030】
前記N個の光は、一定の時間間隔で順次投射されてもよい。
【0031】
前記光を変調させる光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されてもよい。
【0032】
前記駆動時間は、前記投射時間より短くてもよい。
【0033】
前記光を撮影する撮像素子の露光時間は、前記駆動時間に同期されてもよい。
【0034】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されてもよい。
【0035】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であり、前記変調された光は、同じ変調信号で変調されてもよい。
【0036】
前記N個の光は、同じ周期波であり、前記変調された光は、異なる変調信号で変調されてもよい。
【0037】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であってもよい。
【0038】
前記生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされてもよい。
【0039】
前記N個のサブ映像は、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別の前記N個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせるステップをさらに含んでもよい。
【0040】
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出してもよい。
【0041】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されてもよい。
【発明の効果】
【0042】
本発明によれば、光の光投射時間と光変調器の駆動時間とを同期させて、外光が除去された反射光を獲得することができる。
【0043】
また、撮像素子の露出時間も、光変調器の駆動時間と同期されて、外光が除去されたサブ映像を獲得することができる。
【0044】
さらに、撮影されたサブ映像に対して単純に乗算及び加算のみを適用して、不規則なノイズを除去できるため、不規則なノイズを除去するのに必要なメモリ使用量及び演算量を大きく減少させることができる。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施形態にかかる三次元映像獲得装置を概略的に示す図である。
【図2】本発明の一実施形態にかかるN個の異なる反射光を変調した後、N個の異なるサブ映像を生成する過程を示す図である。
【図3】本発明の一実施形態にかかる一つの同じ投射光とN個の異なる光変調信号とで、N個の異なるサブ映像を生成する過程を示す図である。
【図4A】投射光のデューティ比が100%である場合の三次元映像を撮影するタイムチャートを示す図である。
【図4B】投射光のデューティ比が20%である場合の三次元映像を撮影するタイムチャートを示す図である。
【図5】本発明の一実施形態にかかる光源、光変調器及び撮像素子が同期して映像を撮影するタイムチャートを示す図である。
【図6】撮像素子のあらゆるピクセルが光変調器の単一駆動時間で露出されない場合、映像を撮影するタイムチャートを示す図である。
【図7】本発明の一実施形態にかかるN個の異なる映像から奥行き情報を算出する過程を概略的に示す図面である。
【図8】本発明の一実施形態にかかる加重値Ak,Bkを例示的に示す表である。
【図9】本発明の一実施形態にかかる奥行き情報の算出方法を説明するフローチャートである。
【発明を実施するための形態】
【0046】
以下、添付された図面を参照して、本発明の実施形態を詳細に説明する。添付された図面に示す層や領域の幅及び厚さは、明細書の明確性のために多少誇張されて示される。詳細な説明の全体にわたって、同じ参照番号は、同じ構成要素を表す。
【0047】
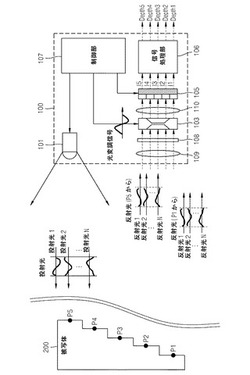
図1は、本発明の一実施形態にかかる三次元映像獲得装置100を概略的に示す図である。図1を参照すれば、三次元映像獲得装置100は、所定の波長を有する光を発生させる光源101と、被写体200から反射された光を光変調させる光変調器103と、光変調器103により変調された光からサブ映像を生成する撮像素子105と、撮像素子105の出力に基づいて奥行き情報を算出し、奥行き情報が含まれた映像を生成する信号処理部106と、前記光源101、光変調器103、撮像素子105及び信号処理部106の動作を制御するための制御部107と、を備える。
【0048】
また、三次元映像獲得装置100は、被写体200から反射された光のうち、所定の波長を有する光のみを透過させるフィルタ108をさらに備え、光変調器103の光入射面には、反射光を光変調器103の領域内に集光させる第1レンズ109、及び光変調器103と撮像素子105との間に変調されたサブ映像を撮像素子105の領域内に集光させる第2レンズ110がさらに配置される。
【0049】
光源101は、例えば、安全のために人間の目には見えない約850nmの近赤外線(Near Infrared: NIR)の波長を有する光を放出させる発光ダイオード(Light-Emitting Diode: LED)またはレーザーダイオード(Laser Diode: LD)であるが、波長の帯域及び光源101の種類は制限されない。
【0050】
光源101から被写体200に投射される投射光は、所定の周期を有する周期的な連続関数の形態を有する。例えば、投射光は、サイン波、ランプ波、四角波のように特殊に定義された波形を有してもよいが、定義されていない一般的な形態の波形を有してもよい。また、光源101は、制御部107の制御下で周期的に一定時間の間だけ光を被写体200に集中して投射する。光が被写体200に投射される時間を、光投射時間という。
【0051】
光変調器103は、被写体200から反射された光を制御部107の制御によって変調する。例えば、光変調器103は、所定の波形を有する光変調信号によって利得を変化させて、反射光のサイズを変調させる。このために、光変調器103は、可変利得を有する。
【0052】
光変調器103は、距離による光の位相差または移動時間を識別するために、数十ないし数百MHzの高い変調速度で動作する。これに符合する光変調器103として、例えば、MCP(Multi-Channel Plate)を備えるサブ映像増倍管、GaAs系の固体光変調器103、電光(Electro-Optic)物質を利用した薄型の光変調器103などが使われる。図1には、光変調器103が透過型であると示されているが、反射型の光変調器を使用してもよい。
【0053】
また、光変調器103も、光源101と同様に、一定時間の間駆動されて、被写体200から反射された光を変調させる。光変調器103が駆動されて、光を変調させる時間を、光変調器の駆動時間という。光源101の光投射時間と光変調器103の駆動時間とは同期される。これにより、光変調器103の駆動時間は、光源101の光投射時間と同じであるか、または光源101の光投射時間より短い。
【0054】
撮像素子105は、光変調器103により変調された反射光を制御部107の制御によって検出して、サブ映像を生成する役割を担う。被写体200のある一点までの距離だけを測定しようとする場合、撮像素子105は、例えば、フォトダイオードや積分器のような単一の光センサーを使用することも可能である。しかし、被写体200上の複数の点までの距離を同時に測定しようとする場合、撮像素子105は、複数のフォトダイオードまたは他の光検出器の二次元または一次元アレイを有してもよい。例えば、前記撮像素子105は、二次元アレイを有するCCD(Charge-Coupled Device)イメージセンサー、またはCMOS(Complimentary Metal-Oxide Semiconductor)イメージセンサーであってもよい。撮像素子105は、反射光別にサブ映像を生成する。
【0055】
信号処理部106は、撮像素子105の出力に基づいて奥行き情報を算出し、奥行き情報が含まれた三次元映像を生成する。信号処理部106は、例えば、専用の集積回路(Integrated Circuit: IC)で具現されてもよく、三次元映像獲得装置100内に設置されたソフトウェアで具現されてもよい。ソフトウェアで具現される場合、信号処理部106は、別途、可搬性の記録媒体に保存されてもよい。
【0056】
以下では、前述した構造を有する三次元映像獲得装置100の動作を概略的に説明する。
【0057】
まず、光源101は、制御部107の制御によって、所定の周期及び波形を有するN個の異なる投射光を順次に被写体200に向けて投射する。ここで、Nは、3以上の自然数である。光源101は、N個の投射光を連続して順次に投射してもよく、一定の時間間隔でN個の投射光を順次に投射してもよい。
【0058】
例えば、四つの異なる投射光を使用する場合、光源101は、時間T1の間投射光1を発生させて、被写体200に投射し、次の時間T2の間投射光2を発生させて、被写体200に投射し、時間T3の間投射光3を発生させて、被写体200に投射し、次いで、時間T4の間投射光4を発生させて、被写体200に投射する。このように、被写体200に順次に投射される投射光は、サイン波のような特定の周期を有する連続関数の形態を有する。例えば、投射光1ないし4は、同じ周期及び波形を有しつつ、サイズまたは位相が異なる周期波であってもよい。
【0059】
投射光が複数個である場合、隣接した時間帯で投射される投射光の位相差は、360/Nであり、各投射光の周期は、光源101の駆動時間より短い。光源101の駆動時間内に、N個の投射光がいずれも順次に被写体200に投射される。
【0060】
被写体200に投射された投射光は、被写体200の表面で反射された後、第1レンズ109に入射する。一般的に、被写体200は、三次元映像獲得装置100からの距離、すなわち、奥行きが異なる複数の表面を有する。図1には、説明の単純化のために、奥行きが異なる五つの表面P1〜P5を有する被写体200が例示されている。奥行きが異なる五つの表面P1〜P5からそれぞれ投射光が反射されて、異なる時間分遅延された(すなわち、位相が異なる)五つの反射光がそれぞれ発生する。
【0061】
例えば、投射光1が被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光1が発生し、投射光2が被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光2が発生し、同様に投射光Nも被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光Nが発生する。三次元映像獲得装置100からの距離が最も遠い表面P1から反射された反射光は、基準となる位相から、ΦP1ほどの位相遅延後に第1レンズ109に達し、三次元映像獲得装置100からの距離が最も近い表面P5から反射された反射光は、ΦP1より小さいΦP5ほどの位相遅延後に第1レンズ109に達する。
【0062】
第1レンズ109は、反射光を光変調器103の領域内にフォーカシングする。第1レンズ109と光変調器103との間には、使用波長以外の背景光などの外光を除去するために、所定の波長を有する光のみを透過させるフィルタ108が配置される。例えば、光源101が約850nmの近赤外線(NIR)の波長を有する光を放出する場合、前記フィルタ108は、約850nmの近赤外線の波長帯域を通過させる近赤外線帯域通過フィルタである。したがって、光変調器103に入射する光は、光源101から放出されて、被写体200から反射された光が支配的となる。図1には、第1レンズ109と光変調器103との間にフィルタ108が配置されていると示されているが、第1レンズ109とフィルタ108との位置は互いに変わってもよい。例えば、フィルタ108を先に通過した近赤外線光が、第1レンズ109により光変調器103にフォーカシングされてもよい。
【0063】
これにより、光変調器103は、所定の波形を有する光変調信号に反射光を変調する。説明の便宜上、被写体200の五つの表面P1〜P5が、撮像素子105の五つの領域に区分されるピクセルに対応すると仮定する。光変調器103での利得波形の周期は、投射光の波形周期と同じである。図1に示す例において、光変調器103は、被写体200の五つの表面P1〜P5からそれぞれ反射された五つの反射光1を変調して、撮像素子105に提供し、次いで、五つの反射光2ないし5の反射光Nを順次に変調して、撮像素子105に提供する。反射光は、光変調器103を通過しつつ、そのサイズが光変調信号を乗じた量ほど変調される。光変調信号は、その周期を投射光と同一にする。
【0064】
光変調器103によりサイズが変調された光は、第2レンズ110を通過して、倍率調整及び再フォーカシングされた後、撮像素子105に達する。したがって、変調された光は、第2レンズ110により撮像素子105の領域内に集光される。撮像素子105は、光源101及び光変調器103と同期されて、前記変調された光を一定の時間受光することで、サブ映像を生成する。撮像素子105が露出されて、変調された光を受光する時間を、撮像素子105の露光時間という。
【0065】
以下、N個の反射光からN個のサブ映像を生成する方法について説明する。
【0066】
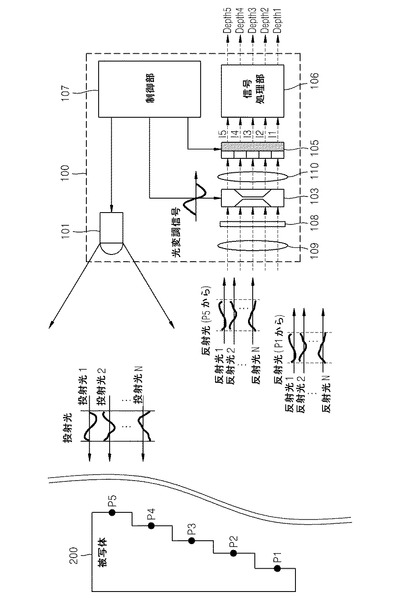
図2は、本発明の一実施形態によるN個の異なる反射光を変調した後、N個の異なるサブ映像を生成する過程を示す図である。
【0067】
撮像素子105は、図2の(A)で表示されたように、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光1を所定の露光時間受光して、サブ映像1を生成する。次いで、図2の(B)で表示されたように、撮像素子105は、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光2を所定の露光時間受光して、サブ映像2を生成する。かかる過程を反復して、最後に、図2の(C)で表示されたように、撮像素子105は、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光Nを所定の露光時間受光して、サブ映像Nを生成する。かかる方式により、図2の(D)で表示されたように、N個の異なるサブ映像が順次に得られる。
【0068】
このように得たそれぞれのサブ映像1〜Nは、奥行き情報を有する一つのフレームの映像を生成するためのサブフレーム映像である。例えば、一つのフレームの周期をTdとするならば、N個のサブ映像1〜Nのそれぞれを得るための撮像素子105の露光時間は、約Td/Nである。
【0069】
一方、図2では、N個の異なる投射光と反射光とを使用して、異なるN個のサブ映像を生成する場合について説明した。しかし、あらゆるサブ映像で同じ投射光を使用し、それぞれのサブ映像ごとに光変調器103が異なる利得波形で反射光を変調することも可能である。
【0070】
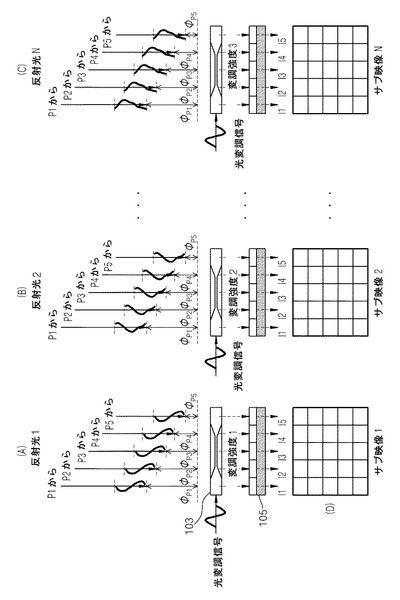
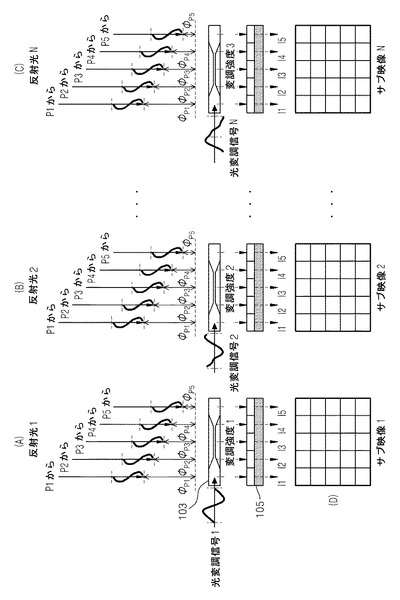
図3は、本発明の一実施形態にかかり、一つの同じ投射光とN個の異なる光変調信号とで、N個の異なるサブ映像を生成する過程を示す図である。図3を参照すれば、被写体200から反射された反射光は、あらゆるサブ映像で同じ波形と位相とを有する。各サブ映像の反射光には、前述したように、被写体200の表面P1〜P5によって異なる位相遅延ΦP1〜ΦP5が存在する。図3の(A)ないし(C)にそれぞれ示すように、光変調器103は、光変調信号1を用いて反射光を変調し、光変調器103は、光変調信号1と異なる光変調信号2を用いて反射光を変調し、光変調器103は、さらに異なる光変調信号Nを用いて反射光を変調する。ここで、光変調信号1〜Nは、完全に異なる波形の信号であってもよいが、周期と波形とは同じであり、単に位相のみが異なる信号であってもよい。これにより、図3の(D)に示すように、撮像素子105は、異なるN個のサブ映像1〜Nが得られる。
【0071】
以下では、信号波形を利用して、サブ映像を生成する方法について説明する。
【0072】
説明の便宜上、光源101がN個の異なる投射光を被写体200に投射し、光変調器103が一つの同じ光変調信号を使用する実施形態を中心に記述する。しかし、一つの同じ投射光とN個の異なる光変調信号とを使用する場合にも、以下の理論的な説明は同様に適用される。また、撮像素子105の出力が二次元アレイサブ映像である場合でも、それぞれの画素に適用される奥行き情報の算出方法は同一であるので、一つの画素に適用される方法のみを説明する。ただし、二次元アレイサブ映像で複数の画素から奥行き情報を同時に算出する場合に、データ管理及びメモリ割り当てなどを効率的に処理して、重複処理する部分を省略することで、計算量を減らすことができる。
【0073】
まず、周期Teを有する一般的な投射光の波形Peは、次の数式1のように表現される。
【0074】
【数1】

【0075】
【数2】
【0076】
前記のような投射光が被写体200から反射された後、位相差ΦTOFを有して三次元映像獲得装置100に戻る反射光の波形Prは、次の数式2のように表現される。
【0077】
【数3】
【0078】
【数4】
【0079】
【数5】
【0080】
【数6】
【0081】
光変調器103を通過して撮像素子105に達する光の波形は、数式2の反射光と数式3の光変調信号とを乗じた値である。したがって、撮像素子105に達する光の瞬間的な波形Iinst.は、次の数式4のように表現される。
【0082】
【数7】
【0083】
撮像素子105は、所定の露光時間Tの間入射光を受光して、サブ映像を生成する。したがって、撮像素子105で生成されたサブ映像は、数式4で表現された瞬間的な波形を時間Tの間に積分したものと同じである。ここで、露光時間Tは、サブフレームの周期と同じである。例えば、秒当たり30フレームの速度で撮影し、各フレーム当たりN個のサブフレームが存在する場合、露光時間Tは、約0.033/N秒となる。撮像素子105の感度によって、撮像素子105に達する光量と撮像素子105の出力値との間に、所定の変換比率が存在するが、便宜上、それを単純化して、撮像素子105のサブ映像I(s)は、下記の数式5で定義される。
【0084】
【数8】
【0085】
前記数式5に表示されたように、出力サブ映像I(s)には、外光成分が存在する。外光は、太陽光や照明灯として基本的に常時均一な量で存在する特徴がある。一方、光源101の投射光は、その波形を任意に調節可能である。これにより、光源101と光変調器103とを同期させて、投射光を一定の時間集中して投射させ、前記一定の時間光変調器103が駆動されて反射された光を光変調させる。そして、投射光が投射されていない時間区間では、光変調器103が駆動せず、最小の透過率を維持することで、撮像素子105に外光が受光されることを防止できる。これにより、数式5の外光成分が減る。ここで、投射光の投射時間と投射光が投射されていない時間との比率をデューティ比と称する。デューティ比が100%未満である場合、光は、不連続的に投射される。
【0086】
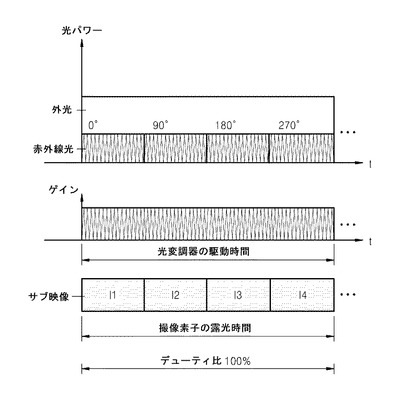
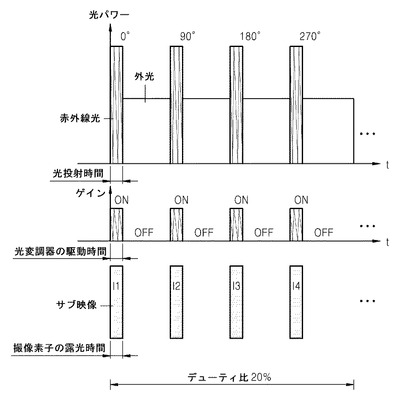
図4Aは、投射光のデューティ比が100%である場合の三次元映像を撮影するタイムチャートを示す図であり、図4Bは、投射光のデューティ比が20%である場合の三次元映像を撮影するタイムチャートを示す図である。図4A及び図4Bには、四つの投射光によって、光源、光変調器及び撮像素子が動作する。光源から出力される光は、赤外線光と仮定し、同じ光量が光変調器103に入射されるように、図4Bでの光源101は、一定時間の間だけ瞬間出力を高めて、光を被写体200に向けて投射すると仮定する。ただし、図面での外光と赤外線光とのサイズは、例示的なものであり、これに限定されない。デューティ比が100%である場合の赤外線光が、外光より大きくてもよい。例えば、室内、曇った天気、暗い所などでは、赤外線光が外光より大きく、海浜または晴天などでは、外光が赤外線光より大きい。
【0087】
図4Aにおいて、光変調器103は、光源101の光投射時間と同期されて、被写体200から反射された光を光変調させる。そして、撮像素子105は、光変調された光を利用して、サブ映像を生成する。光変調器103に入射された光は、光源101から投射されて、被写体200から反射された光だけでなく、外光も含むため、光変調器103は、外光を含む光を光変調させ、撮像素子105が生成したサブ映像にも外光成分が含まれる。
【0088】
一方、図4Bでの光源101は、一定時間の間だけ瞬間出力を高めて、光を被写体200に向けて投射する。そして、光変調器103の駆動時間は、光源101の光投射時間と同期されて、被写体200から反射された光を光変調させ、光が投射されていない時間には駆動せず、最小の透過率を維持することで、外光の流入を遮断させる。結果として、撮像素子105で撮影された外光成分は減り、光源101の投射光成分が維持される。これにより、投射光のデューティ比が100%から20%に減る時、外光成分も1/5に減少し、外光成分に対するS/N比は、5倍向上する。
【0089】
このように、外光成分を減らすために、光源は、100%未満のデューティ比で光を投射しなければならない。そして、光変調器103の駆動時間は、光投射時間と同期されると共に、光変調器103は、数十ないし数百MHzの高い変調速度で動作しなければならない。これに符合する光変調器103として、例えば、MCPを備えるサブ映像増倍管、GaAs系の固体の光変調器103、電光物質を利用した薄型の光変調器103などが使われる。
【0090】
一方、本発明に適用される撮像素子105は、グローバルシャッタとして動作するか、ローリングシャッタとして動作する。ここで、グローバルシャッタの動作原理は、一つのサブ映像の生成時、あらゆるピクセルが同時に露出される。したがって、それぞれのピクセル間の露光時刻差がない。一方、ローリングシャッタの動作原理は、一つのサブ映像の生成時、各ピクセルが順次に露出される。したがって、各ピクセル間の露光時刻差がある。
【0091】
撮像素子105の露光時間も、光源101の光出射時間及び光変調器103の駆動時間と同期される。撮像素子105がグローバルシャッタとして動作する場合、制御部107は、撮像素子105の露出時間を光変調器103の駆動時間に同期させる。そして、撮像素子105がローリングシャッタとして動作する場合にも、撮像素子105のあらゆるピクセルに対する露光時間が、光変調器103の駆動時間以上であれば、制御部107は、撮像素子105の露光時間を光変調器103の駆動時間に同期させる。
【0092】
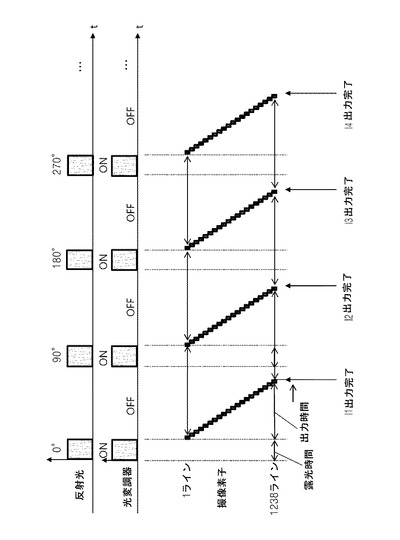
図5は、本発明の一実施形態による光源101、光変調器103及び撮像素子105が同期して、映像を撮影するタイムチャートを示す図である。図5では、便宜上、位相差が異なる四つの投射光によって映像を撮影する方法が示されている。
【0093】
図5に示すように、撮像素子105がローリングシャッタとして動作する場合、ライン別に撮像素子105の露光時間及び出力(read out)時間が異なる。すなわち、撮像素子105は、各ライン別に時間遅延をおいてサブ映像が撮影及び出力される。
【0094】
図5において、光源101の光投射時間、光変調器103の駆動時間、及び撮像素子105の露光時間は、互いに同期されており、撮影素子105のあらゆるピクセルが露光時間で露光される。これにより、撮像素子105で出力されるN個のサブ映像それぞれは、N個の反射光と順次に一対一マッチングされる。
【0095】
一方、光変調器103の単一駆動時間が、撮像素子105内のあらゆるピクセルの共通露光時間より短い場合、光変調器103の単一駆動時間で、撮像素子105のあらゆるピクセルが露光されていない。
【0096】
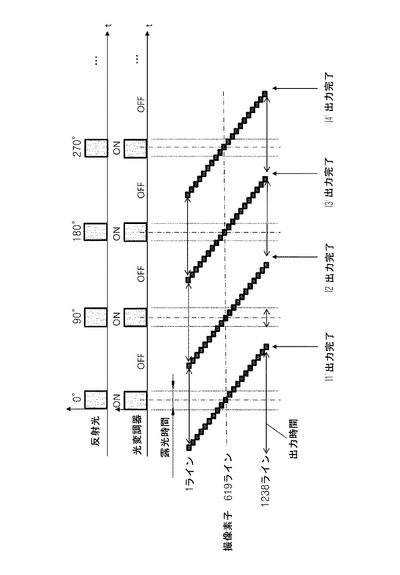
図6は、撮像素子105のあらゆるピクセルが、光変調器103の単一駆動時間で露光されない場合に、映像を撮影するタイムチャートを示す図である。図6では、便宜上、位相差が異なる四つの投射光によって映像を撮影する方法が示されている。
【0097】
図6に示すように、撮像素子105のピクセル領域が、光変調器103の単一駆動時間にいずれも露光されていない。これにより、N個の反射光それぞれは、撮像素子105で出力されるサブ映像とラインで順次に一対一マッチングされていない。この場合、信号処理部106は、光変調器103で各ライン別に出力されるラインサブ映像I1´,I2´,I3´,I4´を、N個の反射光0°,90°,180°,270°と一対一マッチングされるラインサブ映像I1,I2,I3,I4に変換させる。
【0098】
このために、信号処理部106は、下記の数式6のような変換マトリックスを、光変調器103で各ライン別に出力されるラインサブ映像に適用する。下記の数式6は、四つの反射光に係わる四つのラインサブ映像 I1´,I2´,I3´,I4´を変換させる4*4変換マトリックスが示されている。N個のラインサブ映像には、N*N変換マトリックスが適用されることはいうまでもない。
【0099】
【数9】
【0100】
ここで、kは、撮像素子105のラインを表し、Aijは、変換値であって、撮像素子105の露光時間とサブ映像の出力時間とによって既に定義されて既に保存された値である。
【0101】
例えば、図6において、最初のラインの変換式は、下記の数式7の通りである。
【0102】
【数10】
【0103】
最後の1238番目のラインの変換式は、下記の数式8の通りである。
【0104】
【数11】
【0105】
変換マトリックスにより変換されたサブ映像I(s)は、前記数式5に適用される。
【0106】
N個のラインサブ映像それぞれがN個の位相差と一対一マッチングされた後、信号処理部106は、ラインサブ映像それぞれをライン別に結合して、N個のサブ映像を生成する。これにより、信号処理部106は、N個のサブ映像から奥行き情報を算出する。
【0107】
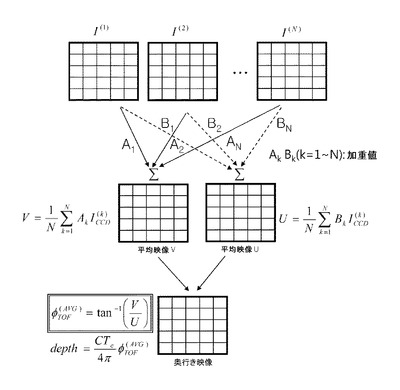
図7は、本発明の一実施形態によるN個の異なる映像から奥行き情報を算出する過程を概略的に示す図である。図7を参照すれば、信号処理部106は、N個のサブ映像にそれぞれ加重値A1〜ANを乗じ、それらの加重されたサブ映像を平均して、一つの第1平均映像Vを生成する。そして、信号処理部106は、同じN個のサブ映像に他の加重値B1〜BNをそれぞれ乗じ、それらの加重されたサブ映像を平均して、第1平均映像Vとは異なる第2平均映像Uを生成する。
【0108】
本発明に適用される加重値A1〜AN,B1〜BNは、サブ映像の個数Nによって定義されており、予め保存されている。例えば、加重値Ak,Bkは、下記の数式9A、9Bの通りである。
【0109】
【数12】
【0110】
前記数式9A、9Bにおいて、i,jは、自然数1ないしNのうちkを除いたいずれか一つの数(i≠k,j≠k)であり、a(i)は、投射光iのサイズであり、位相θ(i)は、投射光iの位相差である。
【0111】
かかる加重値Ak,Bkは、既定の投射光のサイズa(i)及び位相θ(i)を利用して数値化した後、三次元映像獲得装置100の動作時に奥行き情報を算出するために使用される。
【0112】
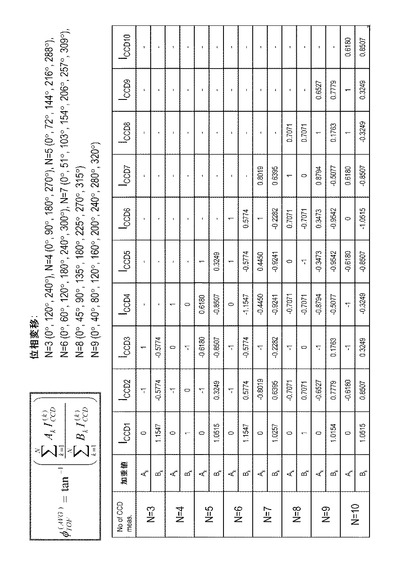
図8は、本発明の一実施形態による加重値Ak,Bkを例示的に示す表である。
【0113】
図8の表において、投射光のサイズは、あらゆる場合について同一であると仮定し、位相は、360°を均等にN等分して決まると仮定した。例えば、N=3の場合、位相θ(1)、θ(2)、θ(3)は、それぞれ0°、120°、240°である。
【0114】
図8の表のように、あらかじめ計算された加重値が、三次元映像獲得装置100のメモリ(図示せず)内に保存されている場合、信号処理部106は、奥行き情報を算出する度に加重値を新たに計算する必要がない。撮影されたサブ映像の個数によって、信号処理部106は、メモリから適切な加重値を読み込んで、それぞれのサブ映像に乗じる演算のみを行えばよい。したがって、奥行き情報のリアルタイム算出が可能である。また、不規則なノイズを除去するのに必要なメモリ使用量及び演算量を大きく減少させるので、三次元映像獲得装置100のサイズ及び製造コストを低減させることができる。
【0115】
図8の表には、一つの組み合わせの投射光のサイズ及び位相に係わる加重値が例示されているが、実際使用時、多様な組み合わせの投射光のサイズ及び位相に係わる加重値の組み合わせをあらかじめ計算しておいてもよい。これにより、奥行き情報を算出する時、信号処理部106は、使われた投射光のサイズと位相との組み合わせ、及び撮影されたサブ映像の個数に対応する組み合わせの加重値をメモリから読み込む。ここで、メモリは、制御部107内に、または信号処理部106内にあっても、それらと分離された別途の保存装置であってもよい。
【0116】
前記のような加重値を利用すれば、複雑な平均化アルゴリズムを行わなくても、乗算及び加算のみを利用した加重平均化方式で、不規則なノイズが除去された奥行き情報を求めることが可能である。
そして、信号処理部106は、第1平均映像Vと第2平均映像Uとの比率V/Uについてのアークタンジェント(arctan=tan−1)の値から奥行き情報を算出する。奥行き情報depthは、下記の数式10の通りである。
【0117】
【数13】
【0118】
前記数式10において、Cは、光の速度であり、Teは、投射光の波形の周期である。
【0119】
一方、図7に、信号処理部106は、N個のサブ映像をそれぞれ得た後、一つのフレームの映像についての奥行き情報を算出し、次いで、再びN個の新たなサブ映像をそれぞれ得た後、次のフレームの映像についての奥行き情報を算出するものとした。しかし、これに限定されない。信号処理部106は、フレームの映像ごとに奥行き情報を更新することも可能である。
【0120】
例えば、最初のN個のサブ映像で得たN個のサブ映像から奥行き情報を算出する方式は、図3に示す方式と同じである。次いで、サブ映像N+1を得れば、サブ映像1を除去し、サブ映像2ないしサブ映像N+1を利用して、前述した加重平均化方式により、奥行き情報を新たに算出する。同様に、サブ映像N+2を得れば、サブ映像2を除去し、サブ映像3ないしサブ映像N+2を利用して、奥行き情報を新たに算出する。このように、先入れ先出し(First-In First-Out: FIFO)方式によりメモリ内にN個のサブ映像を維持しつつ、サブ映像ごとに新たな奥行き情報を算出することも可能である。
【0121】
また、新たなサブ映像を一つずつ追加すると共に、既存のサブ映像を一つずつ除去する方法について説明したが、複数の新たなサブ映像を追加すると共に、同数の既存のサブ映像を除去してもよい。例えば、N個未満の新たなサブ映像を追加し、同数の最も古いサブ映像を除去しつつ、全体的にN個のサブ映像を維持することも可能である。
【0122】
または、第1平均映像V及び第2平均映像Uを算出するにあたって、信号処理部106は、下記の数式11A、11Bのような再帰的合算を利用して、第1平均映像V及び第2平均映像Uを算出することも可能である。
【0123】
【数14】
【0124】
この時、信号処理部106は、N番目のサブ映像が撮影された時点で、第1平均映像Vn及び第2平均映像Unをアップデートし、N−1番目のサブ映像が撮影された時点で生成された第1平均映像Vn−1及び第2平均映像Un−1を削除する。前記のように再帰的合算により第1平均映像及び第2平均映像を生成すれば、N個のサブ映像をいずれも保存する必要がないので、メモリ空間を節約できる。前記メモリ空間は、奥行き情報が含まれたサブ映像が百万ピクセル以上の高解像度へ行くほど問題となる。
【0125】
本実施形態では、ピクセルが二次元アレイ形態で配列された撮像素子105で、サブ映像を生成する方法について説明した。しかし、本サブ映像の生成方法は、ピクセルが一次元アレイであるか、単一ピクセルであるかに関係なく適用される。
【0126】
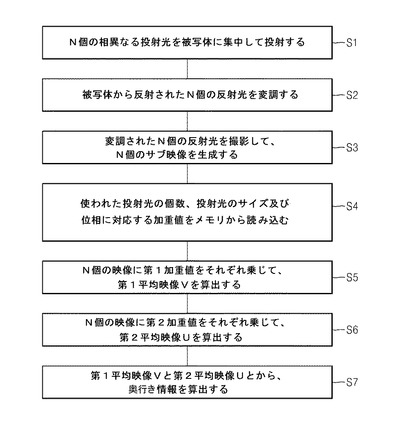
図9は、これまで説明した奥行き情報の算出方法を整理して説明するフローチャートである。図9を参照すれば、まず、光源101は、制御部107により駆動されつつ、N個の異なる投射光を被写体200に順次に投射する(S1)。ここで、Nは、3以上の自然数である。N個の異なる投射光は、周期が同じであり、サイズまたは位相が異なる波形を有する。N個の投射光は、被写体200の表面から反射された後、N個の異なる反射光として光変調器103に順次に入射される。これにより、光変調器103は、駆動時間が光源101の光投射時間と同期されて、被写体200の表面から反射されたN個の異なる反射光を、それぞれ所定の利得波形を有する光変調信号を用いて変調する(S2)。ここで、光変調信号は、投射光と同じ周期を有する周期波である。このように、光源101の光投射時間と光変調器103の駆動時間とが同期されて、一定時間の間だけ光が投射され、投射された光を変調させれば、変調後の光に含まれる外光が最小化される。
【0127】
撮像素子105は、変調されたN個の反射光をそれぞれ順次に撮影して、N個のサブ映像を生成する(S3)。撮像素子105の露光時間も、光変調器103の駆動時間と同期される。このように生成されたN個のサブ映像は、信号処理部106に伝達される。
【0128】
一方、撮像素子105で生成されたN個のサブ映像は、N個の反射光と順次に一対一マッチングされる。しかし、N個のサブ映像がN個の反射光と順次に一対一マッチングされていない場合、信号処理部106は、ライン別にN個のサブ映像を変換させて、ライン別のN個のサブ映像それぞれをN個の反射光と一対一マッチングさせる。
【0129】
信号処理部106は、あらかじめ用意されている所定の加重値Ak,Bkをメモリ(図示せず)から読み込む(S4)。前述したように、前記加重値Ak,Bkは、使われた投射光の個数N、投射光のサイズ及び投射光の位相によって決定される。メモリには、投射光の個数N、投射光のサイズ及び投射光の位相に対する多様な組み合わせによる多様な加重値Ak,Bkがあらかじめ計算されて保存されている。信号処理部106は、メモリに保存されている多様な加重値Ak,Bkのうち、実際に使われた投射光の個数N、投射光のサイズ及び投射光の位相に対応する加重値を検索して読み込む。
【0130】
信号処理部106は、N個の反射光と一対一マッチングされたN個のサブ映像に、それに対応する第1加重値Akをそれぞれ乗じて平均して、第1平均映像Vを算出する(S5)。同様に、信号処理部106は、N個のサブ映像に、それに対応する第2加重値Bkをそれぞれ乗じて平均して、第2平均映像Uを算出する(S6)。次いで、信号処理部106は、第1平均映像Vと第2平均映像Uとの比率V/Uについてのアークタンジェント値から、三次元映像獲得装置100から被写体200までの距離である奥行き情報を算出する(S7)。かかる本発明の一実施形態によれば、サブ映像の個数Nが増加するとしても、第1平均映像Vと第2平均映像Uとを算出するための乗算及び加算のみが比例的に増加するため、演算量の増加が非常に小さい。したがって、不規則なノイズが除去された非常に正確な奥行き情報を、比較的少ない演算量で求めることができる。
【0131】
図9のフローチャートでは、N個の異なる投射光を使用する実施形態を中心に説明したが、前述したように、N個の同じ投射光を使用する代わりに、N個の異なる光変調信号を使用することも可能である。例えば、N個の異なる光変調信号は、周期と波形とが同じであり、サイズまたは位相が異なる周期波であってもよい。この場合にも、撮像素子105からN個の異なるサブ映像が得られ、以後の奥行き情報を算出する過程は、同一に適用される。ただし、第1及び第2加重値は、光変調信号のサイズ及び光変調信号の位相によって決定される。
【0132】
一方、前述した演算を行って、不規則なノイズが除去された奥行き情報を計算する信号処理部106は、前述したように、専用の集積回路(IC)で具現されてもよく、個人用コンピュータのような一般的なコンピュータ装置内に設置されたソフトウェアで具現されてもよい。ソフトウェアで具現される場合、信号処理部106は、コンピュータにより実行可能な形式で別途の移動可能な記録媒体に保存されてもよい。
【0133】
以上、本発明の理解を助けるために、三次元映像獲得装置、及び前記三次元映像獲得装置における奥行き情報を算出する方法についての例示的な実施形態が説明され、添付された図面に示された。しかし、かかる実施形態は、単に本発明を例示するためのものであり、これを制限しないという点が理解されなければならない。そして、本発明は、図示されて説明された内容に限定されないという点が理解されなければならない。これは、多様な他の変形が当業者にとって行われるためである。
【産業上の利用可能性】
【0134】
本発明は、例えば、3Dディスプレイ関連の技術分野に適用可能である。
【符号の説明】
【0135】
100 三次元映像獲得装置、
101 光源、
103 光変調器、
105 撮像素子、
106 信号処理部、
107 制御部、
108 フィルタ、
109 第1レンズ、
110 第2レンズ、
200 被写体。
【技術分野】
【0001】
本発明は、三次元映像獲得装置、及び前記三次元映像獲得装置における奥行き情報を算出する方法に関する。
【背景技術】
【0002】
最近、奥行きのある映像を表示できる3Dディスプレイ装置の発展及び需要増加と共に、3Dコンテンツの重要性が高くなっている。これによって、一般のユーザが3Dコンテンツを直接制作できる3Dカメラのような三次元映像獲得装置が研究されている。かかる3Dカメラは、一回の撮影で既存の二次元カラー映像情報と共に奥行き情報も得なければならない。
【0003】
被写体の表面と3Dカメラとの距離に関する奥行き情報は、二台のカメラを利用した両眼立体視法や、構造化光とカメラとを利用した三角測量法を利用して得られる。しかし、かかる方法は、被写体の距離が遠くなるほど、奥行き情報についての正確度が急激に低下し、被写体の表面状態に依存的であるので、精密な奥行き情報を得がたい。
【0004】
かかる問題を改善するために、タイム・オブ・フライト(Time-of-Flight: TOF)法が導入された。TOF技術は、照明光を被写体に照射した後、被写体から反射される光が受光部で受光されるまでの光の伝播時間を測定する方法である。TOF技術によれば、発光ダイオード(Light-Emitting Diode: LED)またはレーザーダイオード(Laser Diode: LD)を含む照明光学系を利用して、特定の波長の光(例えば、850nmの近赤外線)を被写体に投射し、被写体から反射された同じ波長の光を受光部で受光した後、奥行き情報を算出するための一連の処理過程を経る。かかる一連の光処理過程によって、多様なTOF技術が紹介されている。
【0005】
しかし、前述したTOF法では、ノイズのない理想的な環境を仮定して、奥行き情報を算出する。しかし、3Dカメラを使用する場合、室内では照明、室外では太陽光などの外光が周辺に常に存在する。かかる外光は、カメラに入射されて、奥行き情報の算出過程でノイズとなる。
【0006】
したがって、奥行き情報の算出過程でノイズとなる外光を除去する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、外光を除去して、奥行き情報を算出する方法及びその三次元映像獲得装置を提供することである。
【課題を解決するための手段】
【0008】
本発明の一実施形態にかかる三次元映像獲得装置は、N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備える。
【0009】
前記N個の光は、不連続的に投射されてもよい。
【0010】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されてもよい。
【0011】
前記光源は、前記N個の光を一定の時間間隔で順次投射してもよい。
【0012】
前記光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されてもよい。
【0013】
前記駆動時間は、前記投射時間より短くてもよい。
【0014】
前記撮像素子の露光時間は、前記駆動時間に同期されてもよい。
【0015】
前記撮像素子は、前記光の投射時間で露光されて、前記変調された光を撮影し、次の投射開始時刻までに前記N個のサブ映像を出力してもよい。
【0016】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されてもよい。
【0017】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であってもよい。
【0018】
前記光変調器は、同じ変調信号で反射光を変調してもよい。
【0019】
前記N個の光は、同じ周期波であってもよい。
【0020】
前記光変調器は、異なる変調信号で反射光を変調してもよい。
【0021】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であってもよい。
【0022】
前記反射された光は、前記N個の光のうち、前記被写体から反射されるN個の反射光を含んでもよい。
【0023】
前記撮像素子で生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされてもよい。
【0024】
前記信号処理部は、前記N個のサブ映像が、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別のN個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせてもよい。
【0025】
前記信号処理部は、前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出してもよい。
【0026】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されてもよい。
【0027】
本発明の他の実施形態にかかる奥行き情報の算出方法は、N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させるステップと、前記変調された光を撮影して、N個のサブ映像を生成するステップと、前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出するステップと、を含む。
【0028】
前記N個の光は、不連続的に投射されてもよい。
【0029】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されてもよい。
【0030】
前記N個の光は、一定の時間間隔で順次投射されてもよい。
【0031】
前記光を変調させる光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されてもよい。
【0032】
前記駆動時間は、前記投射時間より短くてもよい。
【0033】
前記光を撮影する撮像素子の露光時間は、前記駆動時間に同期されてもよい。
【0034】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されてもよい。
【0035】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であり、前記変調された光は、同じ変調信号で変調されてもよい。
【0036】
前記N個の光は、同じ周期波であり、前記変調された光は、異なる変調信号で変調されてもよい。
【0037】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であってもよい。
【0038】
前記生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされてもよい。
【0039】
前記N個のサブ映像は、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別の前記N個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせるステップをさらに含んでもよい。
【0040】
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出してもよい。
【0041】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されてもよい。
【発明の効果】
【0042】
本発明によれば、光の光投射時間と光変調器の駆動時間とを同期させて、外光が除去された反射光を獲得することができる。
【0043】
また、撮像素子の露出時間も、光変調器の駆動時間と同期されて、外光が除去されたサブ映像を獲得することができる。
【0044】
さらに、撮影されたサブ映像に対して単純に乗算及び加算のみを適用して、不規則なノイズを除去できるため、不規則なノイズを除去するのに必要なメモリ使用量及び演算量を大きく減少させることができる。
【図面の簡単な説明】
【0045】
【図1】本発明の一実施形態にかかる三次元映像獲得装置を概略的に示す図である。
【図2】本発明の一実施形態にかかるN個の異なる反射光を変調した後、N個の異なるサブ映像を生成する過程を示す図である。
【図3】本発明の一実施形態にかかる一つの同じ投射光とN個の異なる光変調信号とで、N個の異なるサブ映像を生成する過程を示す図である。
【図4A】投射光のデューティ比が100%である場合の三次元映像を撮影するタイムチャートを示す図である。
【図4B】投射光のデューティ比が20%である場合の三次元映像を撮影するタイムチャートを示す図である。
【図5】本発明の一実施形態にかかる光源、光変調器及び撮像素子が同期して映像を撮影するタイムチャートを示す図である。
【図6】撮像素子のあらゆるピクセルが光変調器の単一駆動時間で露出されない場合、映像を撮影するタイムチャートを示す図である。
【図7】本発明の一実施形態にかかるN個の異なる映像から奥行き情報を算出する過程を概略的に示す図面である。
【図8】本発明の一実施形態にかかる加重値Ak,Bkを例示的に示す表である。
【図9】本発明の一実施形態にかかる奥行き情報の算出方法を説明するフローチャートである。
【発明を実施するための形態】
【0046】
以下、添付された図面を参照して、本発明の実施形態を詳細に説明する。添付された図面に示す層や領域の幅及び厚さは、明細書の明確性のために多少誇張されて示される。詳細な説明の全体にわたって、同じ参照番号は、同じ構成要素を表す。
【0047】
図1は、本発明の一実施形態にかかる三次元映像獲得装置100を概略的に示す図である。図1を参照すれば、三次元映像獲得装置100は、所定の波長を有する光を発生させる光源101と、被写体200から反射された光を光変調させる光変調器103と、光変調器103により変調された光からサブ映像を生成する撮像素子105と、撮像素子105の出力に基づいて奥行き情報を算出し、奥行き情報が含まれた映像を生成する信号処理部106と、前記光源101、光変調器103、撮像素子105及び信号処理部106の動作を制御するための制御部107と、を備える。
【0048】
また、三次元映像獲得装置100は、被写体200から反射された光のうち、所定の波長を有する光のみを透過させるフィルタ108をさらに備え、光変調器103の光入射面には、反射光を光変調器103の領域内に集光させる第1レンズ109、及び光変調器103と撮像素子105との間に変調されたサブ映像を撮像素子105の領域内に集光させる第2レンズ110がさらに配置される。
【0049】
光源101は、例えば、安全のために人間の目には見えない約850nmの近赤外線(Near Infrared: NIR)の波長を有する光を放出させる発光ダイオード(Light-Emitting Diode: LED)またはレーザーダイオード(Laser Diode: LD)であるが、波長の帯域及び光源101の種類は制限されない。
【0050】
光源101から被写体200に投射される投射光は、所定の周期を有する周期的な連続関数の形態を有する。例えば、投射光は、サイン波、ランプ波、四角波のように特殊に定義された波形を有してもよいが、定義されていない一般的な形態の波形を有してもよい。また、光源101は、制御部107の制御下で周期的に一定時間の間だけ光を被写体200に集中して投射する。光が被写体200に投射される時間を、光投射時間という。
【0051】
光変調器103は、被写体200から反射された光を制御部107の制御によって変調する。例えば、光変調器103は、所定の波形を有する光変調信号によって利得を変化させて、反射光のサイズを変調させる。このために、光変調器103は、可変利得を有する。
【0052】
光変調器103は、距離による光の位相差または移動時間を識別するために、数十ないし数百MHzの高い変調速度で動作する。これに符合する光変調器103として、例えば、MCP(Multi-Channel Plate)を備えるサブ映像増倍管、GaAs系の固体光変調器103、電光(Electro-Optic)物質を利用した薄型の光変調器103などが使われる。図1には、光変調器103が透過型であると示されているが、反射型の光変調器を使用してもよい。
【0053】
また、光変調器103も、光源101と同様に、一定時間の間駆動されて、被写体200から反射された光を変調させる。光変調器103が駆動されて、光を変調させる時間を、光変調器の駆動時間という。光源101の光投射時間と光変調器103の駆動時間とは同期される。これにより、光変調器103の駆動時間は、光源101の光投射時間と同じであるか、または光源101の光投射時間より短い。
【0054】
撮像素子105は、光変調器103により変調された反射光を制御部107の制御によって検出して、サブ映像を生成する役割を担う。被写体200のある一点までの距離だけを測定しようとする場合、撮像素子105は、例えば、フォトダイオードや積分器のような単一の光センサーを使用することも可能である。しかし、被写体200上の複数の点までの距離を同時に測定しようとする場合、撮像素子105は、複数のフォトダイオードまたは他の光検出器の二次元または一次元アレイを有してもよい。例えば、前記撮像素子105は、二次元アレイを有するCCD(Charge-Coupled Device)イメージセンサー、またはCMOS(Complimentary Metal-Oxide Semiconductor)イメージセンサーであってもよい。撮像素子105は、反射光別にサブ映像を生成する。
【0055】
信号処理部106は、撮像素子105の出力に基づいて奥行き情報を算出し、奥行き情報が含まれた三次元映像を生成する。信号処理部106は、例えば、専用の集積回路(Integrated Circuit: IC)で具現されてもよく、三次元映像獲得装置100内に設置されたソフトウェアで具現されてもよい。ソフトウェアで具現される場合、信号処理部106は、別途、可搬性の記録媒体に保存されてもよい。
【0056】
以下では、前述した構造を有する三次元映像獲得装置100の動作を概略的に説明する。
【0057】
まず、光源101は、制御部107の制御によって、所定の周期及び波形を有するN個の異なる投射光を順次に被写体200に向けて投射する。ここで、Nは、3以上の自然数である。光源101は、N個の投射光を連続して順次に投射してもよく、一定の時間間隔でN個の投射光を順次に投射してもよい。
【0058】
例えば、四つの異なる投射光を使用する場合、光源101は、時間T1の間投射光1を発生させて、被写体200に投射し、次の時間T2の間投射光2を発生させて、被写体200に投射し、時間T3の間投射光3を発生させて、被写体200に投射し、次いで、時間T4の間投射光4を発生させて、被写体200に投射する。このように、被写体200に順次に投射される投射光は、サイン波のような特定の周期を有する連続関数の形態を有する。例えば、投射光1ないし4は、同じ周期及び波形を有しつつ、サイズまたは位相が異なる周期波であってもよい。
【0059】
投射光が複数個である場合、隣接した時間帯で投射される投射光の位相差は、360/Nであり、各投射光の周期は、光源101の駆動時間より短い。光源101の駆動時間内に、N個の投射光がいずれも順次に被写体200に投射される。
【0060】
被写体200に投射された投射光は、被写体200の表面で反射された後、第1レンズ109に入射する。一般的に、被写体200は、三次元映像獲得装置100からの距離、すなわち、奥行きが異なる複数の表面を有する。図1には、説明の単純化のために、奥行きが異なる五つの表面P1〜P5を有する被写体200が例示されている。奥行きが異なる五つの表面P1〜P5からそれぞれ投射光が反射されて、異なる時間分遅延された(すなわち、位相が異なる)五つの反射光がそれぞれ発生する。
【0061】
例えば、投射光1が被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光1が発生し、投射光2が被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光2が発生し、同様に投射光Nも被写体200の五つの表面P1〜P5からそれぞれ反射されて、位相が異なる五つの反射光Nが発生する。三次元映像獲得装置100からの距離が最も遠い表面P1から反射された反射光は、基準となる位相から、ΦP1ほどの位相遅延後に第1レンズ109に達し、三次元映像獲得装置100からの距離が最も近い表面P5から反射された反射光は、ΦP1より小さいΦP5ほどの位相遅延後に第1レンズ109に達する。
【0062】
第1レンズ109は、反射光を光変調器103の領域内にフォーカシングする。第1レンズ109と光変調器103との間には、使用波長以外の背景光などの外光を除去するために、所定の波長を有する光のみを透過させるフィルタ108が配置される。例えば、光源101が約850nmの近赤外線(NIR)の波長を有する光を放出する場合、前記フィルタ108は、約850nmの近赤外線の波長帯域を通過させる近赤外線帯域通過フィルタである。したがって、光変調器103に入射する光は、光源101から放出されて、被写体200から反射された光が支配的となる。図1には、第1レンズ109と光変調器103との間にフィルタ108が配置されていると示されているが、第1レンズ109とフィルタ108との位置は互いに変わってもよい。例えば、フィルタ108を先に通過した近赤外線光が、第1レンズ109により光変調器103にフォーカシングされてもよい。
【0063】
これにより、光変調器103は、所定の波形を有する光変調信号に反射光を変調する。説明の便宜上、被写体200の五つの表面P1〜P5が、撮像素子105の五つの領域に区分されるピクセルに対応すると仮定する。光変調器103での利得波形の周期は、投射光の波形周期と同じである。図1に示す例において、光変調器103は、被写体200の五つの表面P1〜P5からそれぞれ反射された五つの反射光1を変調して、撮像素子105に提供し、次いで、五つの反射光2ないし5の反射光Nを順次に変調して、撮像素子105に提供する。反射光は、光変調器103を通過しつつ、そのサイズが光変調信号を乗じた量ほど変調される。光変調信号は、その周期を投射光と同一にする。
【0064】
光変調器103によりサイズが変調された光は、第2レンズ110を通過して、倍率調整及び再フォーカシングされた後、撮像素子105に達する。したがって、変調された光は、第2レンズ110により撮像素子105の領域内に集光される。撮像素子105は、光源101及び光変調器103と同期されて、前記変調された光を一定の時間受光することで、サブ映像を生成する。撮像素子105が露出されて、変調された光を受光する時間を、撮像素子105の露光時間という。
【0065】
以下、N個の反射光からN個のサブ映像を生成する方法について説明する。
【0066】
図2は、本発明の一実施形態によるN個の異なる反射光を変調した後、N個の異なるサブ映像を生成する過程を示す図である。
【0067】
撮像素子105は、図2の(A)で表示されたように、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光1を所定の露光時間受光して、サブ映像1を生成する。次いで、図2の(B)で表示されたように、撮像素子105は、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光2を所定の露光時間受光して、サブ映像2を生成する。かかる過程を反復して、最後に、図2の(C)で表示されたように、撮像素子105は、被写体200の五つの表面P1〜P5からそれぞれ反射された後、変調された五つの反射光Nを所定の露光時間受光して、サブ映像Nを生成する。かかる方式により、図2の(D)で表示されたように、N個の異なるサブ映像が順次に得られる。
【0068】
このように得たそれぞれのサブ映像1〜Nは、奥行き情報を有する一つのフレームの映像を生成するためのサブフレーム映像である。例えば、一つのフレームの周期をTdとするならば、N個のサブ映像1〜Nのそれぞれを得るための撮像素子105の露光時間は、約Td/Nである。
【0069】
一方、図2では、N個の異なる投射光と反射光とを使用して、異なるN個のサブ映像を生成する場合について説明した。しかし、あらゆるサブ映像で同じ投射光を使用し、それぞれのサブ映像ごとに光変調器103が異なる利得波形で反射光を変調することも可能である。
【0070】
図3は、本発明の一実施形態にかかり、一つの同じ投射光とN個の異なる光変調信号とで、N個の異なるサブ映像を生成する過程を示す図である。図3を参照すれば、被写体200から反射された反射光は、あらゆるサブ映像で同じ波形と位相とを有する。各サブ映像の反射光には、前述したように、被写体200の表面P1〜P5によって異なる位相遅延ΦP1〜ΦP5が存在する。図3の(A)ないし(C)にそれぞれ示すように、光変調器103は、光変調信号1を用いて反射光を変調し、光変調器103は、光変調信号1と異なる光変調信号2を用いて反射光を変調し、光変調器103は、さらに異なる光変調信号Nを用いて反射光を変調する。ここで、光変調信号1〜Nは、完全に異なる波形の信号であってもよいが、周期と波形とは同じであり、単に位相のみが異なる信号であってもよい。これにより、図3の(D)に示すように、撮像素子105は、異なるN個のサブ映像1〜Nが得られる。
【0071】
以下では、信号波形を利用して、サブ映像を生成する方法について説明する。
【0072】
説明の便宜上、光源101がN個の異なる投射光を被写体200に投射し、光変調器103が一つの同じ光変調信号を使用する実施形態を中心に記述する。しかし、一つの同じ投射光とN個の異なる光変調信号とを使用する場合にも、以下の理論的な説明は同様に適用される。また、撮像素子105の出力が二次元アレイサブ映像である場合でも、それぞれの画素に適用される奥行き情報の算出方法は同一であるので、一つの画素に適用される方法のみを説明する。ただし、二次元アレイサブ映像で複数の画素から奥行き情報を同時に算出する場合に、データ管理及びメモリ割り当てなどを効率的に処理して、重複処理する部分を省略することで、計算量を減らすことができる。
【0073】
まず、周期Teを有する一般的な投射光の波形Peは、次の数式1のように表現される。
【0074】
【数1】
【0075】
【数2】
【0076】
前記のような投射光が被写体200から反射された後、位相差ΦTOFを有して三次元映像獲得装置100に戻る反射光の波形Prは、次の数式2のように表現される。
【0077】
【数3】
【0078】
【数4】
【0079】
【数5】
【0080】
【数6】
【0081】
光変調器103を通過して撮像素子105に達する光の波形は、数式2の反射光と数式3の光変調信号とを乗じた値である。したがって、撮像素子105に達する光の瞬間的な波形Iinst.は、次の数式4のように表現される。
【0082】
【数7】
【0083】
撮像素子105は、所定の露光時間Tの間入射光を受光して、サブ映像を生成する。したがって、撮像素子105で生成されたサブ映像は、数式4で表現された瞬間的な波形を時間Tの間に積分したものと同じである。ここで、露光時間Tは、サブフレームの周期と同じである。例えば、秒当たり30フレームの速度で撮影し、各フレーム当たりN個のサブフレームが存在する場合、露光時間Tは、約0.033/N秒となる。撮像素子105の感度によって、撮像素子105に達する光量と撮像素子105の出力値との間に、所定の変換比率が存在するが、便宜上、それを単純化して、撮像素子105のサブ映像I(s)は、下記の数式5で定義される。
【0084】
【数8】
【0085】
前記数式5に表示されたように、出力サブ映像I(s)には、外光成分が存在する。外光は、太陽光や照明灯として基本的に常時均一な量で存在する特徴がある。一方、光源101の投射光は、その波形を任意に調節可能である。これにより、光源101と光変調器103とを同期させて、投射光を一定の時間集中して投射させ、前記一定の時間光変調器103が駆動されて反射された光を光変調させる。そして、投射光が投射されていない時間区間では、光変調器103が駆動せず、最小の透過率を維持することで、撮像素子105に外光が受光されることを防止できる。これにより、数式5の外光成分が減る。ここで、投射光の投射時間と投射光が投射されていない時間との比率をデューティ比と称する。デューティ比が100%未満である場合、光は、不連続的に投射される。
【0086】
図4Aは、投射光のデューティ比が100%である場合の三次元映像を撮影するタイムチャートを示す図であり、図4Bは、投射光のデューティ比が20%である場合の三次元映像を撮影するタイムチャートを示す図である。図4A及び図4Bには、四つの投射光によって、光源、光変調器及び撮像素子が動作する。光源から出力される光は、赤外線光と仮定し、同じ光量が光変調器103に入射されるように、図4Bでの光源101は、一定時間の間だけ瞬間出力を高めて、光を被写体200に向けて投射すると仮定する。ただし、図面での外光と赤外線光とのサイズは、例示的なものであり、これに限定されない。デューティ比が100%である場合の赤外線光が、外光より大きくてもよい。例えば、室内、曇った天気、暗い所などでは、赤外線光が外光より大きく、海浜または晴天などでは、外光が赤外線光より大きい。
【0087】
図4Aにおいて、光変調器103は、光源101の光投射時間と同期されて、被写体200から反射された光を光変調させる。そして、撮像素子105は、光変調された光を利用して、サブ映像を生成する。光変調器103に入射された光は、光源101から投射されて、被写体200から反射された光だけでなく、外光も含むため、光変調器103は、外光を含む光を光変調させ、撮像素子105が生成したサブ映像にも外光成分が含まれる。
【0088】
一方、図4Bでの光源101は、一定時間の間だけ瞬間出力を高めて、光を被写体200に向けて投射する。そして、光変調器103の駆動時間は、光源101の光投射時間と同期されて、被写体200から反射された光を光変調させ、光が投射されていない時間には駆動せず、最小の透過率を維持することで、外光の流入を遮断させる。結果として、撮像素子105で撮影された外光成分は減り、光源101の投射光成分が維持される。これにより、投射光のデューティ比が100%から20%に減る時、外光成分も1/5に減少し、外光成分に対するS/N比は、5倍向上する。
【0089】
このように、外光成分を減らすために、光源は、100%未満のデューティ比で光を投射しなければならない。そして、光変調器103の駆動時間は、光投射時間と同期されると共に、光変調器103は、数十ないし数百MHzの高い変調速度で動作しなければならない。これに符合する光変調器103として、例えば、MCPを備えるサブ映像増倍管、GaAs系の固体の光変調器103、電光物質を利用した薄型の光変調器103などが使われる。
【0090】
一方、本発明に適用される撮像素子105は、グローバルシャッタとして動作するか、ローリングシャッタとして動作する。ここで、グローバルシャッタの動作原理は、一つのサブ映像の生成時、あらゆるピクセルが同時に露出される。したがって、それぞれのピクセル間の露光時刻差がない。一方、ローリングシャッタの動作原理は、一つのサブ映像の生成時、各ピクセルが順次に露出される。したがって、各ピクセル間の露光時刻差がある。
【0091】
撮像素子105の露光時間も、光源101の光出射時間及び光変調器103の駆動時間と同期される。撮像素子105がグローバルシャッタとして動作する場合、制御部107は、撮像素子105の露出時間を光変調器103の駆動時間に同期させる。そして、撮像素子105がローリングシャッタとして動作する場合にも、撮像素子105のあらゆるピクセルに対する露光時間が、光変調器103の駆動時間以上であれば、制御部107は、撮像素子105の露光時間を光変調器103の駆動時間に同期させる。
【0092】
図5は、本発明の一実施形態による光源101、光変調器103及び撮像素子105が同期して、映像を撮影するタイムチャートを示す図である。図5では、便宜上、位相差が異なる四つの投射光によって映像を撮影する方法が示されている。
【0093】
図5に示すように、撮像素子105がローリングシャッタとして動作する場合、ライン別に撮像素子105の露光時間及び出力(read out)時間が異なる。すなわち、撮像素子105は、各ライン別に時間遅延をおいてサブ映像が撮影及び出力される。
【0094】
図5において、光源101の光投射時間、光変調器103の駆動時間、及び撮像素子105の露光時間は、互いに同期されており、撮影素子105のあらゆるピクセルが露光時間で露光される。これにより、撮像素子105で出力されるN個のサブ映像それぞれは、N個の反射光と順次に一対一マッチングされる。
【0095】
一方、光変調器103の単一駆動時間が、撮像素子105内のあらゆるピクセルの共通露光時間より短い場合、光変調器103の単一駆動時間で、撮像素子105のあらゆるピクセルが露光されていない。
【0096】
図6は、撮像素子105のあらゆるピクセルが、光変調器103の単一駆動時間で露光されない場合に、映像を撮影するタイムチャートを示す図である。図6では、便宜上、位相差が異なる四つの投射光によって映像を撮影する方法が示されている。
【0097】
図6に示すように、撮像素子105のピクセル領域が、光変調器103の単一駆動時間にいずれも露光されていない。これにより、N個の反射光それぞれは、撮像素子105で出力されるサブ映像とラインで順次に一対一マッチングされていない。この場合、信号処理部106は、光変調器103で各ライン別に出力されるラインサブ映像I1´,I2´,I3´,I4´を、N個の反射光0°,90°,180°,270°と一対一マッチングされるラインサブ映像I1,I2,I3,I4に変換させる。
【0098】
このために、信号処理部106は、下記の数式6のような変換マトリックスを、光変調器103で各ライン別に出力されるラインサブ映像に適用する。下記の数式6は、四つの反射光に係わる四つのラインサブ映像 I1´,I2´,I3´,I4´を変換させる4*4変換マトリックスが示されている。N個のラインサブ映像には、N*N変換マトリックスが適用されることはいうまでもない。
【0099】
【数9】
【0100】
ここで、kは、撮像素子105のラインを表し、Aijは、変換値であって、撮像素子105の露光時間とサブ映像の出力時間とによって既に定義されて既に保存された値である。
【0101】
例えば、図6において、最初のラインの変換式は、下記の数式7の通りである。
【0102】
【数10】
【0103】
最後の1238番目のラインの変換式は、下記の数式8の通りである。
【0104】
【数11】
【0105】
変換マトリックスにより変換されたサブ映像I(s)は、前記数式5に適用される。
【0106】
N個のラインサブ映像それぞれがN個の位相差と一対一マッチングされた後、信号処理部106は、ラインサブ映像それぞれをライン別に結合して、N個のサブ映像を生成する。これにより、信号処理部106は、N個のサブ映像から奥行き情報を算出する。
【0107】
図7は、本発明の一実施形態によるN個の異なる映像から奥行き情報を算出する過程を概略的に示す図である。図7を参照すれば、信号処理部106は、N個のサブ映像にそれぞれ加重値A1〜ANを乗じ、それらの加重されたサブ映像を平均して、一つの第1平均映像Vを生成する。そして、信号処理部106は、同じN個のサブ映像に他の加重値B1〜BNをそれぞれ乗じ、それらの加重されたサブ映像を平均して、第1平均映像Vとは異なる第2平均映像Uを生成する。
【0108】
本発明に適用される加重値A1〜AN,B1〜BNは、サブ映像の個数Nによって定義されており、予め保存されている。例えば、加重値Ak,Bkは、下記の数式9A、9Bの通りである。
【0109】
【数12】
【0110】
前記数式9A、9Bにおいて、i,jは、自然数1ないしNのうちkを除いたいずれか一つの数(i≠k,j≠k)であり、a(i)は、投射光iのサイズであり、位相θ(i)は、投射光iの位相差である。
【0111】
かかる加重値Ak,Bkは、既定の投射光のサイズa(i)及び位相θ(i)を利用して数値化した後、三次元映像獲得装置100の動作時に奥行き情報を算出するために使用される。
【0112】
図8は、本発明の一実施形態による加重値Ak,Bkを例示的に示す表である。
【0113】
図8の表において、投射光のサイズは、あらゆる場合について同一であると仮定し、位相は、360°を均等にN等分して決まると仮定した。例えば、N=3の場合、位相θ(1)、θ(2)、θ(3)は、それぞれ0°、120°、240°である。
【0114】
図8の表のように、あらかじめ計算された加重値が、三次元映像獲得装置100のメモリ(図示せず)内に保存されている場合、信号処理部106は、奥行き情報を算出する度に加重値を新たに計算する必要がない。撮影されたサブ映像の個数によって、信号処理部106は、メモリから適切な加重値を読み込んで、それぞれのサブ映像に乗じる演算のみを行えばよい。したがって、奥行き情報のリアルタイム算出が可能である。また、不規則なノイズを除去するのに必要なメモリ使用量及び演算量を大きく減少させるので、三次元映像獲得装置100のサイズ及び製造コストを低減させることができる。
【0115】
図8の表には、一つの組み合わせの投射光のサイズ及び位相に係わる加重値が例示されているが、実際使用時、多様な組み合わせの投射光のサイズ及び位相に係わる加重値の組み合わせをあらかじめ計算しておいてもよい。これにより、奥行き情報を算出する時、信号処理部106は、使われた投射光のサイズと位相との組み合わせ、及び撮影されたサブ映像の個数に対応する組み合わせの加重値をメモリから読み込む。ここで、メモリは、制御部107内に、または信号処理部106内にあっても、それらと分離された別途の保存装置であってもよい。
【0116】
前記のような加重値を利用すれば、複雑な平均化アルゴリズムを行わなくても、乗算及び加算のみを利用した加重平均化方式で、不規則なノイズが除去された奥行き情報を求めることが可能である。
そして、信号処理部106は、第1平均映像Vと第2平均映像Uとの比率V/Uについてのアークタンジェント(arctan=tan−1)の値から奥行き情報を算出する。奥行き情報depthは、下記の数式10の通りである。
【0117】
【数13】
【0118】
前記数式10において、Cは、光の速度であり、Teは、投射光の波形の周期である。
【0119】
一方、図7に、信号処理部106は、N個のサブ映像をそれぞれ得た後、一つのフレームの映像についての奥行き情報を算出し、次いで、再びN個の新たなサブ映像をそれぞれ得た後、次のフレームの映像についての奥行き情報を算出するものとした。しかし、これに限定されない。信号処理部106は、フレームの映像ごとに奥行き情報を更新することも可能である。
【0120】
例えば、最初のN個のサブ映像で得たN個のサブ映像から奥行き情報を算出する方式は、図3に示す方式と同じである。次いで、サブ映像N+1を得れば、サブ映像1を除去し、サブ映像2ないしサブ映像N+1を利用して、前述した加重平均化方式により、奥行き情報を新たに算出する。同様に、サブ映像N+2を得れば、サブ映像2を除去し、サブ映像3ないしサブ映像N+2を利用して、奥行き情報を新たに算出する。このように、先入れ先出し(First-In First-Out: FIFO)方式によりメモリ内にN個のサブ映像を維持しつつ、サブ映像ごとに新たな奥行き情報を算出することも可能である。
【0121】
また、新たなサブ映像を一つずつ追加すると共に、既存のサブ映像を一つずつ除去する方法について説明したが、複数の新たなサブ映像を追加すると共に、同数の既存のサブ映像を除去してもよい。例えば、N個未満の新たなサブ映像を追加し、同数の最も古いサブ映像を除去しつつ、全体的にN個のサブ映像を維持することも可能である。
【0122】
または、第1平均映像V及び第2平均映像Uを算出するにあたって、信号処理部106は、下記の数式11A、11Bのような再帰的合算を利用して、第1平均映像V及び第2平均映像Uを算出することも可能である。
【0123】
【数14】
【0124】
この時、信号処理部106は、N番目のサブ映像が撮影された時点で、第1平均映像Vn及び第2平均映像Unをアップデートし、N−1番目のサブ映像が撮影された時点で生成された第1平均映像Vn−1及び第2平均映像Un−1を削除する。前記のように再帰的合算により第1平均映像及び第2平均映像を生成すれば、N個のサブ映像をいずれも保存する必要がないので、メモリ空間を節約できる。前記メモリ空間は、奥行き情報が含まれたサブ映像が百万ピクセル以上の高解像度へ行くほど問題となる。
【0125】
本実施形態では、ピクセルが二次元アレイ形態で配列された撮像素子105で、サブ映像を生成する方法について説明した。しかし、本サブ映像の生成方法は、ピクセルが一次元アレイであるか、単一ピクセルであるかに関係なく適用される。
【0126】
図9は、これまで説明した奥行き情報の算出方法を整理して説明するフローチャートである。図9を参照すれば、まず、光源101は、制御部107により駆動されつつ、N個の異なる投射光を被写体200に順次に投射する(S1)。ここで、Nは、3以上の自然数である。N個の異なる投射光は、周期が同じであり、サイズまたは位相が異なる波形を有する。N個の投射光は、被写体200の表面から反射された後、N個の異なる反射光として光変調器103に順次に入射される。これにより、光変調器103は、駆動時間が光源101の光投射時間と同期されて、被写体200の表面から反射されたN個の異なる反射光を、それぞれ所定の利得波形を有する光変調信号を用いて変調する(S2)。ここで、光変調信号は、投射光と同じ周期を有する周期波である。このように、光源101の光投射時間と光変調器103の駆動時間とが同期されて、一定時間の間だけ光が投射され、投射された光を変調させれば、変調後の光に含まれる外光が最小化される。
【0127】
撮像素子105は、変調されたN個の反射光をそれぞれ順次に撮影して、N個のサブ映像を生成する(S3)。撮像素子105の露光時間も、光変調器103の駆動時間と同期される。このように生成されたN個のサブ映像は、信号処理部106に伝達される。
【0128】
一方、撮像素子105で生成されたN個のサブ映像は、N個の反射光と順次に一対一マッチングされる。しかし、N個のサブ映像がN個の反射光と順次に一対一マッチングされていない場合、信号処理部106は、ライン別にN個のサブ映像を変換させて、ライン別のN個のサブ映像それぞれをN個の反射光と一対一マッチングさせる。
【0129】
信号処理部106は、あらかじめ用意されている所定の加重値Ak,Bkをメモリ(図示せず)から読み込む(S4)。前述したように、前記加重値Ak,Bkは、使われた投射光の個数N、投射光のサイズ及び投射光の位相によって決定される。メモリには、投射光の個数N、投射光のサイズ及び投射光の位相に対する多様な組み合わせによる多様な加重値Ak,Bkがあらかじめ計算されて保存されている。信号処理部106は、メモリに保存されている多様な加重値Ak,Bkのうち、実際に使われた投射光の個数N、投射光のサイズ及び投射光の位相に対応する加重値を検索して読み込む。
【0130】
信号処理部106は、N個の反射光と一対一マッチングされたN個のサブ映像に、それに対応する第1加重値Akをそれぞれ乗じて平均して、第1平均映像Vを算出する(S5)。同様に、信号処理部106は、N個のサブ映像に、それに対応する第2加重値Bkをそれぞれ乗じて平均して、第2平均映像Uを算出する(S6)。次いで、信号処理部106は、第1平均映像Vと第2平均映像Uとの比率V/Uについてのアークタンジェント値から、三次元映像獲得装置100から被写体200までの距離である奥行き情報を算出する(S7)。かかる本発明の一実施形態によれば、サブ映像の個数Nが増加するとしても、第1平均映像Vと第2平均映像Uとを算出するための乗算及び加算のみが比例的に増加するため、演算量の増加が非常に小さい。したがって、不規則なノイズが除去された非常に正確な奥行き情報を、比較的少ない演算量で求めることができる。
【0131】
図9のフローチャートでは、N個の異なる投射光を使用する実施形態を中心に説明したが、前述したように、N個の同じ投射光を使用する代わりに、N個の異なる光変調信号を使用することも可能である。例えば、N個の異なる光変調信号は、周期と波形とが同じであり、サイズまたは位相が異なる周期波であってもよい。この場合にも、撮像素子105からN個の異なるサブ映像が得られ、以後の奥行き情報を算出する過程は、同一に適用される。ただし、第1及び第2加重値は、光変調信号のサイズ及び光変調信号の位相によって決定される。
【0132】
一方、前述した演算を行って、不規則なノイズが除去された奥行き情報を計算する信号処理部106は、前述したように、専用の集積回路(IC)で具現されてもよく、個人用コンピュータのような一般的なコンピュータ装置内に設置されたソフトウェアで具現されてもよい。ソフトウェアで具現される場合、信号処理部106は、コンピュータにより実行可能な形式で別途の移動可能な記録媒体に保存されてもよい。
【0133】
以上、本発明の理解を助けるために、三次元映像獲得装置、及び前記三次元映像獲得装置における奥行き情報を算出する方法についての例示的な実施形態が説明され、添付された図面に示された。しかし、かかる実施形態は、単に本発明を例示するためのものであり、これを制限しないという点が理解されなければならない。そして、本発明は、図示されて説明された内容に限定されないという点が理解されなければならない。これは、多様な他の変形が当業者にとって行われるためである。
【産業上の利用可能性】
【0134】
本発明は、例えば、3Dディスプレイ関連の技術分野に適用可能である。
【符号の説明】
【0135】
100 三次元映像獲得装置、
101 光源、
103 光変調器、
105 撮像素子、
106 信号処理部、
107 制御部、
108 フィルタ、
109 第1レンズ、
110 第2レンズ、
200 被写体。
【特許請求の範囲】
【請求項1】
N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、
前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、
前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備えることを特徴とする三次元映像獲得装置。
【請求項2】
前記N個の光は、不連続的に投射されることを特徴とする請求項1に記載の三次元映像獲得装置。
【請求項3】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されることを特徴とする請求項1又は2に記載の三次元映像獲得装置。
【請求項4】
前記光源は、前記N個の光を一定の時間間隔で順次投射することを特徴とする請求項1又は3に記載の三次元映像獲得装置。
【請求項5】
前記光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されることを特徴とする請求項1〜4のいずれか1項に記載の三次元映像獲得装置。
【請求項6】
前記駆動時間は、前記投射時間より短いことを特徴とする請求項5に記載の三次元映像獲得装置。
【請求項7】
前記撮像素子の露光時間は、前記駆動時間に同期されることを特徴とする請求項5又は6に記載の三次元映像獲得装置。
【請求項8】
前記撮像素子は、前記光の投射時間露光されて、前記変調された光を撮影し、次の投射開始時刻までに前記N個のサブ映像を出力することを特徴とする請求項5〜7のいずれか1項に記載の三次元映像獲得装置。
【請求項9】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されることを特徴とする請求項5〜8のいずれか1項に記載の三次元映像獲得装置。
【請求項10】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であることを特徴とする請求項1〜9のいずれか1項に記載の三次元映像獲得装置。
【請求項11】
前記光変調器は、同じ変調信号で反射光を変調することを特徴とする請求項10に記載の三次元映像獲得装置。
【請求項12】
前記N個の光は、同じ周期波であることを特徴とする請求項1〜9のいずれか1項に記載の三次元映像獲得装置。
【請求項13】
前記光変調器は、異なる変調信号で反射光を変調することを特徴とする請求項12に記載の三次元映像獲得装置。
【請求項14】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であることを特徴とする請求項4に記載の三次元映像獲得装置。
【請求項15】
前記反射された光は、前記N個の光のうち、前記被写体から反射されるN個の反射光を含むことを特徴とする請求項1〜14のいずれか1項に記載の三次元映像獲得装置。
【請求項16】
前記撮像素子で生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされることを特徴とする請求項1〜15の何れか1項に記載の三次元映像獲得装置。
【請求項17】
前記信号処理部は、
前記N個のサブ映像が前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別のN個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせることを特徴とする請求項1〜15の何れか1項に記載の三次元映像獲得装置。
【請求項18】
前記信号処理部は、
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出することを特徴とする請求項1〜17の何れか1項に記載の三次元映像獲得装置。
【請求項19】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されることを特徴とする請求項18に記載の三次元映像獲得装置。
【請求項20】
N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させるステップと、
前記変調された光を撮影して、N個のサブ映像を生成するステップと、
前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出するステップと、を含むことを特徴とする奥行き情報の算出方法。
【請求項21】
前記N個の光は、不連続的に投射されることを特徴とする請求項20に記載の奥行き情報の算出方法。
【請求項22】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されることを特徴とする請求項20又は21に記載の奥行き情報の算出方法。
【請求項23】
前記N個の光は、一定の時間間隔で順次投射されることを特徴とする請求項20又は22に記載の奥行き情報の算出方法。
【請求項24】
前記光を変調させる光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されることを特徴とする請求項20〜23の何れか1項に記載の奥行き情報の算出方法。
【請求項25】
前記駆動時間は、前記投射時間より短いことを特徴とする請求項24に記載の奥行き情報の算出方法。
【請求項26】
前記光を撮影する撮像素子の露光時間は、前記駆動時間に同期されることを特徴とする請求項24又は25に記載の奥行き情報の算出方法。
【請求項27】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されることを特徴とする請求項24〜26の何れか1項に記載の奥行き情報の算出方法。
【請求項28】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であり、
前記変調された光は、同じ変調信号で変調されることを特徴とする請求項20〜27の何れか1項に記載の奥行き情報の算出方法。
【請求項29】
前記N個の光は、同じ周期波であり、
前記変調された光は、異なる変調信号で変調されることを特徴とする請求項20〜27の何れか1項に記載の奥行き情報の算出方法。
【請求項30】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であることを特徴とする請求項23に記載の奥行き情報の算出方法。
【請求項31】
前記生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされることを特徴とする請求項20〜30の何れか1項に記載の奥行き情報の算出方法。
【請求項32】
前記N個のサブ映像は、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別の前記N個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせるステップをさらに含むことを特徴とする請求項20〜30の何れか1項に記載の奥行き情報の算出方法。
【請求項33】
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出することを特徴とする請求項20〜32の何れか1項に記載の奥行き情報の算出方法。
【請求項34】
前記深さ情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されることを特徴とする請求項33に記載の奥行き情報の算出方法。
【請求項35】
N個の光が不連続的に被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、
前記光変調器が前記N個の光それぞれの投射時間と同期されるように、前記光変調器を制御する制御部と、を備えることを特徴とする三次元映像獲得装置。
【請求項36】
前記不連続的に投射されたN個の光を生成する光源をさらに備えることを特徴とする請求項35に記載の三次元映像獲得装置。
【請求項37】
前記Nは、3以上の自然数であることを特徴とする請求項35又は36に記載の三次元映像獲得装置。
【請求項38】
前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮影素子をさらに備え、
前記撮影素子の露光時間は、前記光変調器の駆動時間と同期されたことを特徴とする請求項35〜37の何れか1項に記載の三次元映像獲得装置。
【請求項39】
前記N個のサブ映像を利用して、前記被写体との距離に対応する奥行き情報を算出する信号処理部をさらに備えることを特徴とする請求項38に記載の三次元映像獲得装置。
【請求項1】
N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、
前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮像素子と、
前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出する信号処理部と、を備えることを特徴とする三次元映像獲得装置。
【請求項2】
前記N個の光は、不連続的に投射されることを特徴とする請求項1に記載の三次元映像獲得装置。
【請求項3】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されることを特徴とする請求項1又は2に記載の三次元映像獲得装置。
【請求項4】
前記光源は、前記N個の光を一定の時間間隔で順次投射することを特徴とする請求項1又は3に記載の三次元映像獲得装置。
【請求項5】
前記光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されることを特徴とする請求項1〜4のいずれか1項に記載の三次元映像獲得装置。
【請求項6】
前記駆動時間は、前記投射時間より短いことを特徴とする請求項5に記載の三次元映像獲得装置。
【請求項7】
前記撮像素子の露光時間は、前記駆動時間に同期されることを特徴とする請求項5又は6に記載の三次元映像獲得装置。
【請求項8】
前記撮像素子は、前記光の投射時間露光されて、前記変調された光を撮影し、次の投射開始時刻までに前記N個のサブ映像を出力することを特徴とする請求項5〜7のいずれか1項に記載の三次元映像獲得装置。
【請求項9】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されることを特徴とする請求項5〜8のいずれか1項に記載の三次元映像獲得装置。
【請求項10】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であることを特徴とする請求項1〜9のいずれか1項に記載の三次元映像獲得装置。
【請求項11】
前記光変調器は、同じ変調信号で反射光を変調することを特徴とする請求項10に記載の三次元映像獲得装置。
【請求項12】
前記N個の光は、同じ周期波であることを特徴とする請求項1〜9のいずれか1項に記載の三次元映像獲得装置。
【請求項13】
前記光変調器は、異なる変調信号で反射光を変調することを特徴とする請求項12に記載の三次元映像獲得装置。
【請求項14】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であることを特徴とする請求項4に記載の三次元映像獲得装置。
【請求項15】
前記反射された光は、前記N個の光のうち、前記被写体から反射されるN個の反射光を含むことを特徴とする請求項1〜14のいずれか1項に記載の三次元映像獲得装置。
【請求項16】
前記撮像素子で生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされることを特徴とする請求項1〜15の何れか1項に記載の三次元映像獲得装置。
【請求項17】
前記信号処理部は、
前記N個のサブ映像が前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別のN個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせることを特徴とする請求項1〜15の何れか1項に記載の三次元映像獲得装置。
【請求項18】
前記信号処理部は、
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出することを特徴とする請求項1〜17の何れか1項に記載の三次元映像獲得装置。
【請求項19】
前記奥行き情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されることを特徴とする請求項18に記載の三次元映像獲得装置。
【請求項20】
N個(ここで、Nは、3以上の自然数)の光が被写体に向けて投射されたときに、当該被写体から反射された光を変調させるステップと、
前記変調された光を撮影して、N個のサブ映像を生成するステップと、
前記N個のサブ映像を利用して、被写体との距離を表す奥行き情報を算出するステップと、を含むことを特徴とする奥行き情報の算出方法。
【請求項21】
前記N個の光は、不連続的に投射されることを特徴とする請求項20に記載の奥行き情報の算出方法。
【請求項22】
前記N個の投射された光は、相異なる光であり、一つ以上の光源により発光されることを特徴とする請求項20又は21に記載の奥行き情報の算出方法。
【請求項23】
前記N個の光は、一定の時間間隔で順次投射されることを特徴とする請求項20又は22に記載の奥行き情報の算出方法。
【請求項24】
前記光を変調させる光変調器の駆動時間は、前記N個の光の投射時間にそれぞれ同期されることを特徴とする請求項20〜23の何れか1項に記載の奥行き情報の算出方法。
【請求項25】
前記駆動時間は、前記投射時間より短いことを特徴とする請求項24に記載の奥行き情報の算出方法。
【請求項26】
前記光を撮影する撮像素子の露光時間は、前記駆動時間に同期されることを特徴とする請求項24又は25に記載の奥行き情報の算出方法。
【請求項27】
前記撮像素子のあらゆるピクセルは、前記光の投射時間の間、前記変調された光に露光されることを特徴とする請求項24〜26の何れか1項に記載の奥行き情報の算出方法。
【請求項28】
前記N個の光は、周期が同じであり、サイズと位相のうち少なくとも一つが相異なる周期波であり、
前記変調された光は、同じ変調信号で変調されることを特徴とする請求項20〜27の何れか1項に記載の奥行き情報の算出方法。
【請求項29】
前記N個の光は、同じ周期波であり、
前記変調された光は、異なる変調信号で変調されることを特徴とする請求項20〜27の何れか1項に記載の奥行き情報の算出方法。
【請求項30】
前記N個の光のうち、隣接した時間帯に投射される光の位相差は、360°をN個に等分した値であることを特徴とする請求項23に記載の奥行き情報の算出方法。
【請求項31】
前記生成されたN個のサブ映像は、前記N個の反射光と、順次、一対一マッチングされることを特徴とする請求項20〜30の何れか1項に記載の奥行き情報の算出方法。
【請求項32】
前記N個のサブ映像は、前記N個の反射光と一対一マッチングされていない場合、前記N個のサブ映像をライン別に変換させて、ライン別の前記N個のサブ映像を前記N個の反射光と、順次、一対一マッチングさせるステップをさらに含むことを特徴とする請求項20〜30の何れか1項に記載の奥行き情報の算出方法。
【請求項33】
前記N個のサブ映像に第1加重値をそれぞれ乗じた後で平均して第1平均映像を生成し、前記N個のサブ映像に第2加重値をそれぞれ乗じた後で平均して第2平均映像を生成し、前記第1及び第2平均映像から前記奥行き情報を算出することを特徴とする請求項20〜32の何れか1項に記載の奥行き情報の算出方法。
【請求項34】
前記深さ情報は、第1平均映像と第2平均映像との比率についてのアークタンジェント値から算出されることを特徴とする請求項33に記載の奥行き情報の算出方法。
【請求項35】
N個の光が不連続的に被写体に向けて投射されたときに、当該被写体から反射された光を変調させる光変調器と、
前記光変調器が前記N個の光それぞれの投射時間と同期されるように、前記光変調器を制御する制御部と、を備えることを特徴とする三次元映像獲得装置。
【請求項36】
前記不連続的に投射されたN個の光を生成する光源をさらに備えることを特徴とする請求項35に記載の三次元映像獲得装置。
【請求項37】
前記Nは、3以上の自然数であることを特徴とする請求項35又は36に記載の三次元映像獲得装置。
【請求項38】
前記光変調器により変調された光を撮影して、N個のサブ映像を生成する撮影素子をさらに備え、
前記撮影素子の露光時間は、前記光変調器の駆動時間と同期されたことを特徴とする請求項35〜37の何れか1項に記載の三次元映像獲得装置。
【請求項39】
前記N個のサブ映像を利用して、前記被写体との距離に対応する奥行き情報を算出する信号処理部をさらに備えることを特徴とする請求項38に記載の三次元映像獲得装置。
【図1】

【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−93847(P2013−93847A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−233225(P2012−233225)
【出願日】平成24年10月22日(2012.10.22)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年10月22日(2012.10.22)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]