
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三次元測定対象物の形態調査方法に係り、特に森林における樹木の形態を調査する方法に関する。
【背景技術】
【0002】
森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径、幹体積、幹曲がり等を把握することは、森林の形態を定量化し、森林の維持管理の上で重要である。
【0003】
樹木の樹幹の体積から該樹幹の質量を把握し、更に樹種による枝葉と根の拡大係数、及び炭素係数を用いることで、当該樹木による二酸化炭素の吸収量を算定することもできる。この値をカーボンクレジットとして取り扱う制度もあり、この制度の利用によって森林の管理資金を調達することもできる。
【0004】
樹木の樹幹の体積は、予め伐採した樹木の実測結果から作成済の樹種別の材積式に、今回算定対象となる樹木の樹高と樹幹直径(胸高直径)を当てはめることで求めることができる。
【0005】
このとき、従来技術では、今回算定対象の樹木の樹高、樹幹直径等は、特許文献1に記載の地上レーザー走査装置、又は特許文献2に記載の航空機レーザー走査装置等を用いて計測される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2000-509150
【特許文献2】特開2008-111725
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載の地上レーザー走査装置を用いる方法では、地上に配置された従来の地上レーザー走査装置から照射されるレーザーが樹木を見上げる角度になり、樹木の下部の樹幹、枝、葉等がレーザーを多く反射する障害物になり、これらの障害物が当該樹木又は他の樹木からの反射データを欠損させ、樹木の樹高、樹幹直径等を設定しづらい。
【0008】
特許文献2に記載の航空機レーザー走査装置を用いる方法では、航空機に搭載された従来の航空機レーザー走査装置から照射されるレーザーが樹木の樹冠に反射されて地上に届かず、地形モデルが作成しづらい。それ故、樹木の樹高、胸高直径等を正しく計測することに困難がある。
【0009】
本発明の課題は、レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査することにある。
【0010】
本発明の他の課題は、レーザー走査装置により、森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径等を正しく計測し、ひいては樹幹の幹体積、幹曲がり等を正しく把握することにある。
【課題を解決するための手段】
【0011】
請求項1に係る発明は、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する三次元測定対象物の形態調査方法である。
【0012】
請求項2に係る発明は、請求項1に係る発明において更に、前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成するようにしたものである。
【0013】
請求項3に係る発明は、請求項2に係る発明において更に、前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成し、高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とするようにしたものである。
【0014】
請求項4に係る発明は、請求項3に係る発明において更に、前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出するようにしたものである。また同時に、樹木位置を把握したものである。
【0015】
請求項5に係る発明は、請求項4に記載の三次元測定対象物の形態調査方法であって、単木の単位にて抽出した最高点を樹高として計測し、樹高測定箇所を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別するようにしたものである。
【0016】
請求項6に係る発明は、請求項5に係る発明において更に、前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定するようにしたものである。また、胸高直径を計測するようにしたものである。
【0017】
請求項7に係る発明は、請求項6に係る発明において更に、前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定するようにしたものである。
【0018】
請求項8に係る発明は、請求項1〜7のいずれかに係る発明において更に、前記レーザー走査装置が地表面に設置されてなるようにしたものである。
【0019】
請求項9に係る発明は、請求項8に記載の三次元測定対象物の形態調査方法が適用される調査範囲の地表面に縦横一定間隔をなす格子を想定し、格子の各交差点にレーザー走査装置を配置するようにしたものである。
【0020】
請求項10に係る発明は、コンピュータを、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得する手段と、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する手段として機能させるためのプログラムである。
【0021】
請求項11に係る発明は、請求項10に係る発明において更に、前記コンピュータを、前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する手段として機能させるようにしたものである。
【0022】
請求項12に係る発明は、請求項11に係る発明において更に、前記コンピュータを、前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成する手段と、高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする手段として機能させるようにしたものである。
【0023】
請求項13に係る発明は、請求項12に係る発明において更に、前記コンピュータを、前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する手段として機能させるようにしたものである。また同時に、樹木位置を把握したものである。
【0024】
請求項14に係る発明は、請求項13に係る発明において更に、前記コンピュータを、単木の単位にて抽出した最高点を樹高として計測し、樹高測定箇所を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する手段として機能させるようにしたものである。
【0025】
請求項15に係る発明は、請求項14に係る発明において更に、前記コンピュータを、前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する手段として機能させるようにしたものである。また、胸高直径を計測するようにしたものである。
【0026】
請求項16に係る発明は、請求項15に係る発明において更に、前記コンピュータを、前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する手段として機能させるようにしたものである。
【発明の効果】
【0027】
本発明によれば、レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査することができる。
【0028】
また、レーザー走査装置により、森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径等を正しく計測し、ひいては樹幹の幹体積、幹曲がり等を正しく把握することができる。
【図面の簡単な説明】
【0029】
【図1】図1は本発明による三次元測定対象物の形態調査手順を示す流れ図である。
【図2】図2はレーザー走査装置の配置を示す模式図である。
【図3】図3はレーザー走査装置の計測原理を示す模式図である。
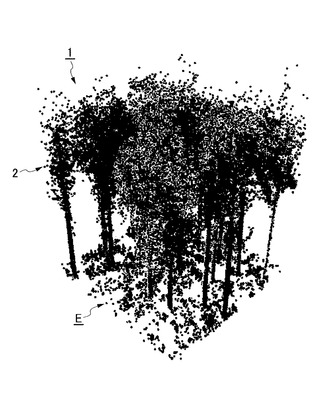
【図4】図4は地表面と樹木のレーザーデータを示す模式図である。
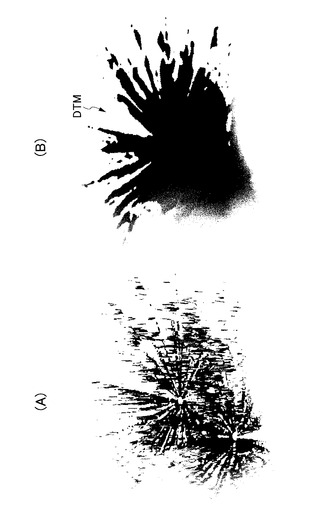
【図5】図5は地形モデルのノイズ処理方法を示す模式図である。
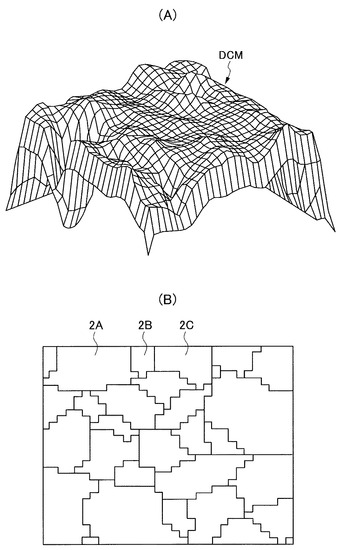
【図6】図6は高さモデルを用いる単木の占有範囲判別方法を示す模式図である。
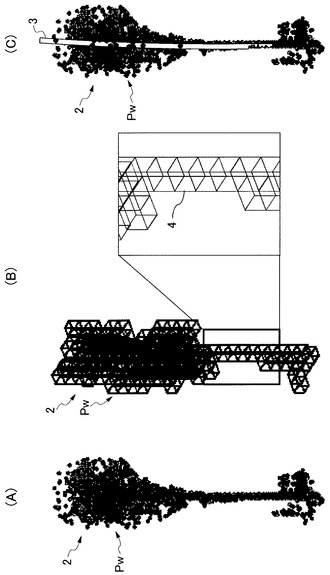
【図7】図7は単木の樹幹判別方法を示す模式図である。
【図8】図8は単木の樹幹中心算定方法を示す模式図である。
【図9】図9は単木に必要とされる幹周データ取得角度を示す線図である。
【図10】図10は単木の幹体積と幹曲がりの算定結果を示す模式図である。
【発明を実施するための形態】
【0030】
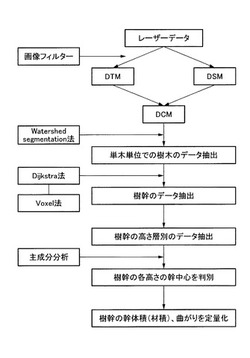
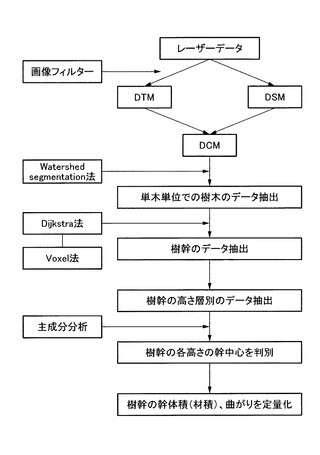
図1は、レーザー走査装置10を用いた三次元測定対象物、本実施例では、地表面Eと、その上の森林1を構成する樹木2の形態を毎木調査する本発明方法の手順を示す流れ図である。
【0031】
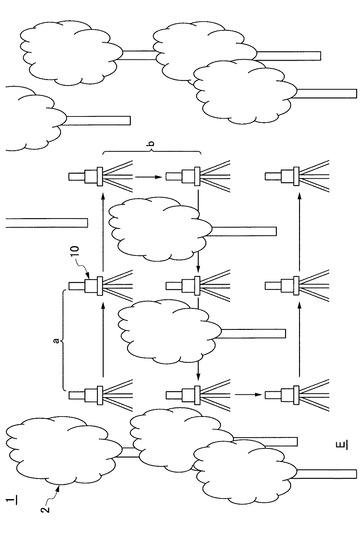
レーザー走査装置10は、本実施例では地表面に設置される地上レーザー走査装置である。本実施例では、図2に示す如く、本発明方法が適用される1ha〜4haに渡る調査範囲の地表面に、縦横一定間隔a×b、好適にはaとbが30m〜100m間隔、より好適にはaとbが50m間隔をなす格子を想定し、格子の各交差点にレーザー走査装置10を配置する。本実施例では、1台のレーザー走査装置10を用い、この1台のレーザー走査装置10を格子の各交差点に順に移動して計測動作する。
【0032】
レーザー走査装置10を上述の如くの格子の交差点(観測点)に配置することで、格子の各交差点に配置された各レーザー走査装置10が調査範囲の各所(各樹木2)について得る反射データを互いに補完し合うことにより、当該各所(各樹木2)における反射データの欠損を最小限にし、走査効率を向上できる。そして、各観測点でレーザー走査装置10の回転角α、傾角βのデータをそれぞれ後述する如くに360度、100度としてデータ取得することで、1ha〜4haの調査範囲の森林1における各樹木2の樹幹3等の形態を1日6時間で正確に毎木調査可能にした。これにより、航空機レーザー走査装置を用いた場合に匹敵する広い調査範囲を高速短時間で高精度に調査できる。
【0033】
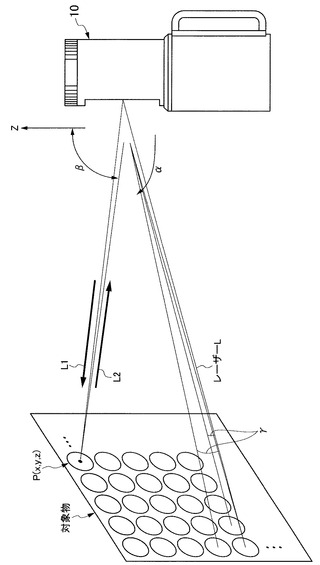
ここで、レーザー走査装置10は、三脚台の上で、鉛直軸まわりに回転し、かつ水平面に対して傾動可能とされるチルト台に設置されて用いられる。レーザー走査装置10は、図3に示す如く、鉛直高さ方向zに沿って上下動する各計測高さ位置で、水平面上における回転角α360度、水平面に対する傾角β100度(水平面に対して上向き+60度、下向き−40度)の走査領域に対し、レーザーLを一定のピッチ角γで照射する。レーザー走査装置10は、レーザーLの照射光L1が走査領域に存在する測定対象物(地表面E又は森林1の樹木2)の反射点P(x,y,z)で反射されたとき、その反射点Pからの反射光L2を受光する。レーザー走査装置10は、1つのレーザーLの照射から受光までの時間により、レーザー走査装置10の設置位置から反射点Pまでの距離を算出し、調査範囲における当該反射点Pの三次元座標化された位置(x,y,z)を算出する。
【0034】
また、レーザー走査装置10は、例えばRIEGL VZ-400(商品名)を採用でき、エコーデジタル処理とオンライン波形分析機能を具備する。これにより、レーザー走査装置10は、レーザーLの同一照射ライン上にある樹木の枝、葉、幹等の複数の反射点Pからのレーザー反射をデジタル処理して抽出し、波形分析することにより、それらの各反射点Pの三次元座標位置(x,y,z)を反射データとして高精度に算出できる。これにより、レーザー走査装置10は、細かな葉や枝の後ろ側にある物からの反射も把握でき、結果として1つの設置カ所から広範囲に、樹木の頂点も把握し得るような反射データの取得ができる。
【0035】
しかるに、レーザー走査装置10が上述の如くに算出したレーザーの反射データを取得したコンピュータは、本発明の三次元測定対象物、具体的には地表面Eと、その上の森林1の樹木2の形態を以下の手順で調査する。
【0036】
(1)コンピュータは、レーザー走査装置10(図2の格子の各交差点に配置された複数のレーザー走査装置10をいう、以下同じ)が、図2に示した調査範囲内で、地上物(森林1の樹木2)が存在する走査領域にレーザーLを照射したとき、該レーザーLの多数の反射点Pの各点を、三次元座標化された反射データの点(x,y,z)として取得する。コンピュータが取得したそのレーザーデータの点群は、地表面Eと森林1の各樹木2に対応する図4に示す如くの絵柄を描くものになる。
【0037】
コンピュータは、レーザー走査装置10が走査した調査範囲の水平面上に多数のグリッド、好適には10cm四方〜1m四方のグリッド、より好適には50cm四方のグリッドを派生させ、各グリッド(ピクセル)の中にある点群Pg(xg,yg,zg)の鉛直座標分布zgから標高値の最も低い低位点zLを抽出する。各グリッドで抽出された低位点zLを用いて、図5に示す如くの調査範囲の地形モデルDTM(Digital Terrain Model)を作成する。これにより、地表面からの反射データをそれ以外の植物等からの反射データと区別し得るものになる。
【0038】
尚、各グリッドで抽出された低位点zLのデータは図5(A)に示した如くのノイズ(地表面とは言えない突起物等)が多いデータであるから、画像フィルターを用いて、図5(B)に示す如くのノズルを低減したデータにする。ノイズの低減手法としては、データが欠損している場所(穴)には近隣の各ピクセルの低位点zLの平均値で補間し、ノイズがある場所では近隣の各ピクセルの低位点zLの平均値と比較してそのノイズを除去する。この画像フィルターを繰り返し導入することで、滑らかでノイズや穴のない地形モデルDTMを作成できる。
【0039】
(2)コンピュータは、上述(1)で調査範囲に派生させた各グリッドの中にある点群Pgのデータの鉛直座標分布zgから標高値の最も高い高位点zHを抽出する。各グリッドで抽出された高位点zHを用いて、調査範囲における地上物(森林1の樹木2)の表面モデルDSM(Digital Surface Model)を作成する。この表面モデルDSMは樹木2の樹冠の高さレベルを示すものになる。
【0040】
(3)コンピュータは、上述(1)の調査範囲に高さの異なる複数の地上物(森林1の樹木2)が存在するとき、該調査範囲における上述(2)の表面モデルDSMと上述(1)の地形モデルDTMの、各水平座標位置(x,y)での高さ(z)の差分を求めることにより、地表面の凹凸の影響を除いた図6(A)に示す如くの各地上物(樹木2)の高さだけを表す高さモデルDCM(Digital Canopy Model)を作成する。高さモデルDCMの上面は、各樹木2の樹高の最高点が形成する多数の山と、各山の間の谷とからなる。
【0041】
コンピュータは、高さモデルDCMにWatershed Segmentation法を適用し、高さモデルDCMに表れる各山の個々が、それらの周囲の谷により囲まれる水平座標(x,y)の範囲を、各地上物(樹木2)の占有範囲2A、2B、2C…として判別する。
【0042】
コンピュータは、このようにして判別された図6(B)に示す如くの各樹木2の占有範囲2A、2B、2C…の中にある点群Pwのデータに基づき、各樹木2を単木の単位にて図7(A)に示す如くに抽出する。コンピュータは、各樹木2の占有範囲2A、2B、2C…、及び各樹木2に属する点群Pwを、単木毎に互いに色分け表示できる。
【0043】
コンピュータは、各樹木2の占有範囲2A、2B、2C…にある点群Pw(xw,yw,zw)の鉛直座標分布zwから標高値の最も高い高位点(ピーク)を、当該樹木2の樹高として算定する。
【0044】
(4)コンピュータは、上述(3)により単木の単位にて抽出した樹木2の点群Pwの中で、前述の如く最高点(樹高計測箇所)を始点とし、Dijkstra法を用いて、樹幹3のデータを抽出し、該樹幹3の位置を判別する。
【0045】
このとき、Voxel法を以下の如くに併用することで、Dijkstra法の計算処理速度を向上させる。
【0046】
即ち、コンピュータは、単木の単位にて抽出した樹木2の最高点(樹高計測箇所)を始点とし、その地表点(樹木の地表にある点)を終点とする。そして、図7(B)に示す如く、樹木2の全点群Pwを複数の単位サイズの箱4により囲み分けする。更に、樹木2の始点と終点を結ぶ直線に対して最短距離にある各箱4を選択し、選択した各箱4を順につないだものを、図7(C)に示す如くの当該樹木2の樹幹3として判別する。
【0047】
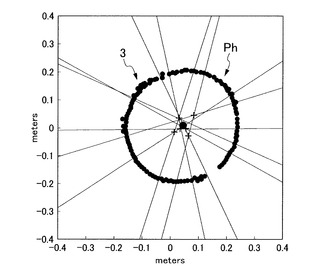
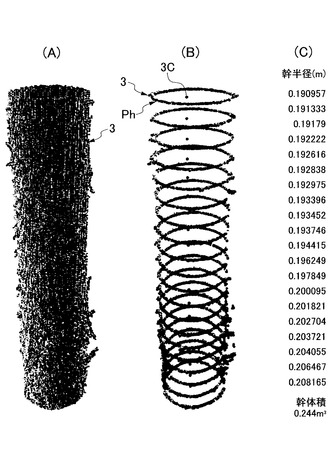
(5)コンピュータは、上述(4)により判別した樹木2の樹幹3のデータを、一定間隔の高さ別に層状化し、高さの各層の中にある点群Ph(xh,yh,zh)を抽出し、この点群Phから各層の樹幹3の幹中心3C、幹周(樹幹3の周形状、周長)、幹直径及び/又は幹面積(樹幹3の断面積)等からなる幹データを算定する。
【0048】
このとき、樹木2の樹幹3が他の樹木2、枝葉等に邪魔され、幹周の一部しか、又は幹周の一側面しかレーザーが照射されず、当該樹幹3の幹周のレーザーデータが欠損している場合がある。安全な幹周のデータが得られなくても、樹幹3の幹中心3C、幹直径等を以下の如くに算定可能にした。
【0049】
即ち、コンピュータは、図8に示す如く、レーザーデータが幹周の一部で欠損していても、得られている幹周の点群Phを周方向にグループ分けし、各点群グループで主成分分析を行なう。各点群グループの第1主成分を求め、この第1主成分に直交する第2主成分を求める。各点群グループについて求めた第2主成分の交点を樹幹3の幹中心3Cとし、その幹中心3Cと周皮(幹周)(周皮からのレーザー反射)との距離を幹直径と推定する。また、樹幹3の幹直径から幹周、幹面積も算定できる。
【0050】
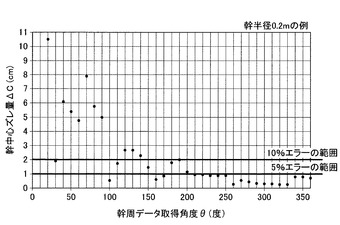
ここで、図9は、樹幹3の幹周のレーザーデータが欠損しているとき、幹周のレーザーデータが得られている幹中心まわりの角度範囲(幹周データ取得角度θ)と、これによって算定され得る幹中心が正しい中心に対するずれ量(幹中心ずれ量ΔC)との関係を調査した実験結果である。図9によれば、樹幹3の幹中心3Cを推定するに必要な幹周データ取得角度θは、好適には100度以上、より好適には150度以上であることが認められる。幹周データ取得角度θが150度以上であれば、10%のエラー内で正確な幹半径(幹直径)を得ることができる。但し、幹周データ取得角度θが上述の100度、150度というとき、それらの幹周データ取得角度θ内にデータが実質的に連続してあれば良く、幹周データ取得角度θ内におけるデータの僅かな欠けは許される。
【0051】
(6)コンピュータは、上述(5)により算定した樹木2の樹幹3の幹データに基づき、樹幹3の幹体積、及び/又は幹高さ方向の幹曲がり(歪み、反り等を含む)を算定する。
【0052】
即ち、樹木2の樹幹3の各層の幹面積を各層の間隔で積分する如くに重ね合せることにより、樹幹3の幹体積を算定できる。また、樹木2の樹幹3の各層の幹中心3Cを高さ方向に重ね合せることにより、樹幹3の幹高さ方向の幹曲がりを算定できる。
【0053】
樹木2の樹幹3について取得した図10(A)のレーザーデータに対し、本発明方法により算定した樹幹3の高さ方向の各層の幹周形態を図10(B)に示し、各層の幹半径、幹体積を図10(A)に示す。本発明方法により、樹木2の樹幹3の形態を実物に対し違和感なく正確に毎木調査できることを認めた。
【0054】
従って、本発明によれば、地表面、地物、構造物等の地形データを取得するとともに、地表面の上の立木である各樹木2の位置、その樹幹3の樹高、幹直径、幹体積、曲がりや反り等の品質を併せてデータ化し、立木を切り倒すことなく、調査範囲の森林1の全体に渡る樹木2の形態を調査し、森林価値を算定できる。森林1の全体に渡る各樹木2の調査結果は、間伐材の効果的な選択、効率的な作業路線の計画立案等の作業ステップでも利用でき、林業の更なる情報化を促進する。
【0055】
また、森林1の全体に渡る各樹木2の樹幹3の幹直径、幹体積、幹曲がりを、直接計測によって定量化できる特異性、優位性は高い。そして、各樹木2の樹幹3の正しく算定された幹体積からその質量を正しく把握でき、この幹質量に樹種による枝葉と根の拡大係数、及び炭素係数を用いることで、当該樹木2による二酸化炭素の吸収量を高精度に求め、ひいてはカーボンクレジットの制度を利用し、森林の管理資金を安定的に調達できる。循環型環境社会に適合する新たな林業経営にも大きく寄与できる。
【0056】
ここで、本発明は、コンピュータをして、上述(1)〜(6)の各手順を実行する手段として機能させるためのプログラムを含む。
【0057】
以上、本発明の実施例を図面により詳述したが、本発明の具体的な構成はこの実施例に限られるものではなく、本発明の要旨を逸脱しない範囲の設計の変更等があっても本発明に含まれる。例えば、本発明は航空機レーザー装置を用いた三次元測定対象物の形態調査方法にも適用できる。また、測定対象物を地表面の上の車両、建築物、構造物、人等の動物とするものにも適用できる。
【産業上の利用可能性】
【0058】
本発明は、三次元測定対象物の形態調査方法であり、測定対象物を森林の樹木とするとき、以下の如くに、自動で毎木調査できる。即ち、レーザー走査装置から照射されたレーザーの反射点の点群を入力として地形モデルDTM、表面モデルDSMを作成し、それらの差分からその樹木の高さだけを表す高さモデルDCMを作成する。作成された高さモデルDCMに例えばWatershed Segmentation法を適用することで各樹木の単木単位の占有範囲を算定し、この占有範囲にある点群に例えばDijkstra法を適用することで各樹木の樹幹を他の部分と判別する。各樹木の樹幹を高さ別に層状化し、各層の点群から樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する。更に、幹データに基づき、樹幹の幹体積、及び/又は幹曲がりを算定するものである。
【符号の説明】
【0059】
1 森林
2 樹木
3 樹幹
10 レーザー走査装置
【技術分野】
【0001】
本発明は、三次元測定対象物の形態調査方法に係り、特に森林における樹木の形態を調査する方法に関する。
【背景技術】
【0002】
森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径、幹体積、幹曲がり等を把握することは、森林の形態を定量化し、森林の維持管理の上で重要である。
【0003】
樹木の樹幹の体積から該樹幹の質量を把握し、更に樹種による枝葉と根の拡大係数、及び炭素係数を用いることで、当該樹木による二酸化炭素の吸収量を算定することもできる。この値をカーボンクレジットとして取り扱う制度もあり、この制度の利用によって森林の管理資金を調達することもできる。
【0004】
樹木の樹幹の体積は、予め伐採した樹木の実測結果から作成済の樹種別の材積式に、今回算定対象となる樹木の樹高と樹幹直径(胸高直径)を当てはめることで求めることができる。
【0005】
このとき、従来技術では、今回算定対象の樹木の樹高、樹幹直径等は、特許文献1に記載の地上レーザー走査装置、又は特許文献2に記載の航空機レーザー走査装置等を用いて計測される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2000-509150
【特許文献2】特開2008-111725
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1に記載の地上レーザー走査装置を用いる方法では、地上に配置された従来の地上レーザー走査装置から照射されるレーザーが樹木を見上げる角度になり、樹木の下部の樹幹、枝、葉等がレーザーを多く反射する障害物になり、これらの障害物が当該樹木又は他の樹木からの反射データを欠損させ、樹木の樹高、樹幹直径等を設定しづらい。
【0008】
特許文献2に記載の航空機レーザー走査装置を用いる方法では、航空機に搭載された従来の航空機レーザー走査装置から照射されるレーザーが樹木の樹冠に反射されて地上に届かず、地形モデルが作成しづらい。それ故、樹木の樹高、胸高直径等を正しく計測することに困難がある。
【0009】
本発明の課題は、レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査することにある。
【0010】
本発明の他の課題は、レーザー走査装置により、森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径等を正しく計測し、ひいては樹幹の幹体積、幹曲がり等を正しく把握することにある。
【課題を解決するための手段】
【0011】
請求項1に係る発明は、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する三次元測定対象物の形態調査方法である。
【0012】
請求項2に係る発明は、請求項1に係る発明において更に、前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成するようにしたものである。
【0013】
請求項3に係る発明は、請求項2に係る発明において更に、前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成し、高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とするようにしたものである。
【0014】
請求項4に係る発明は、請求項3に係る発明において更に、前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出するようにしたものである。また同時に、樹木位置を把握したものである。
【0015】
請求項5に係る発明は、請求項4に記載の三次元測定対象物の形態調査方法であって、単木の単位にて抽出した最高点を樹高として計測し、樹高測定箇所を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別するようにしたものである。
【0016】
請求項6に係る発明は、請求項5に係る発明において更に、前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定するようにしたものである。また、胸高直径を計測するようにしたものである。
【0017】
請求項7に係る発明は、請求項6に係る発明において更に、前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定するようにしたものである。
【0018】
請求項8に係る発明は、請求項1〜7のいずれかに係る発明において更に、前記レーザー走査装置が地表面に設置されてなるようにしたものである。
【0019】
請求項9に係る発明は、請求項8に記載の三次元測定対象物の形態調査方法が適用される調査範囲の地表面に縦横一定間隔をなす格子を想定し、格子の各交差点にレーザー走査装置を配置するようにしたものである。
【0020】
請求項10に係る発明は、コンピュータを、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得する手段と、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する手段として機能させるためのプログラムである。
【0021】
請求項11に係る発明は、請求項10に係る発明において更に、前記コンピュータを、前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する手段として機能させるようにしたものである。
【0022】
請求項12に係る発明は、請求項11に係る発明において更に、前記コンピュータを、前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成する手段と、高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする手段として機能させるようにしたものである。
【0023】
請求項13に係る発明は、請求項12に係る発明において更に、前記コンピュータを、前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する手段として機能させるようにしたものである。また同時に、樹木位置を把握したものである。
【0024】
請求項14に係る発明は、請求項13に係る発明において更に、前記コンピュータを、単木の単位にて抽出した最高点を樹高として計測し、樹高測定箇所を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する手段として機能させるようにしたものである。
【0025】
請求項15に係る発明は、請求項14に係る発明において更に、前記コンピュータを、前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する手段として機能させるようにしたものである。また、胸高直径を計測するようにしたものである。
【0026】
請求項16に係る発明は、請求項15に係る発明において更に、前記コンピュータを、前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する手段として機能させるようにしたものである。
【発明の効果】
【0027】
本発明によれば、レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査することができる。
【0028】
また、レーザー走査装置により、森林における樹木の位置、本数、樹冠面積、樹高、樹幹の幹周、幹直径等を正しく計測し、ひいては樹幹の幹体積、幹曲がり等を正しく把握することができる。
【図面の簡単な説明】
【0029】
【図1】図1は本発明による三次元測定対象物の形態調査手順を示す流れ図である。
【図2】図2はレーザー走査装置の配置を示す模式図である。
【図3】図3はレーザー走査装置の計測原理を示す模式図である。
【図4】図4は地表面と樹木のレーザーデータを示す模式図である。
【図5】図5は地形モデルのノイズ処理方法を示す模式図である。
【図6】図6は高さモデルを用いる単木の占有範囲判別方法を示す模式図である。
【図7】図7は単木の樹幹判別方法を示す模式図である。
【図8】図8は単木の樹幹中心算定方法を示す模式図である。
【図9】図9は単木に必要とされる幹周データ取得角度を示す線図である。
【図10】図10は単木の幹体積と幹曲がりの算定結果を示す模式図である。
【発明を実施するための形態】
【0030】
図1は、レーザー走査装置10を用いた三次元測定対象物、本実施例では、地表面Eと、その上の森林1を構成する樹木2の形態を毎木調査する本発明方法の手順を示す流れ図である。
【0031】
レーザー走査装置10は、本実施例では地表面に設置される地上レーザー走査装置である。本実施例では、図2に示す如く、本発明方法が適用される1ha〜4haに渡る調査範囲の地表面に、縦横一定間隔a×b、好適にはaとbが30m〜100m間隔、より好適にはaとbが50m間隔をなす格子を想定し、格子の各交差点にレーザー走査装置10を配置する。本実施例では、1台のレーザー走査装置10を用い、この1台のレーザー走査装置10を格子の各交差点に順に移動して計測動作する。
【0032】
レーザー走査装置10を上述の如くの格子の交差点(観測点)に配置することで、格子の各交差点に配置された各レーザー走査装置10が調査範囲の各所(各樹木2)について得る反射データを互いに補完し合うことにより、当該各所(各樹木2)における反射データの欠損を最小限にし、走査効率を向上できる。そして、各観測点でレーザー走査装置10の回転角α、傾角βのデータをそれぞれ後述する如くに360度、100度としてデータ取得することで、1ha〜4haの調査範囲の森林1における各樹木2の樹幹3等の形態を1日6時間で正確に毎木調査可能にした。これにより、航空機レーザー走査装置を用いた場合に匹敵する広い調査範囲を高速短時間で高精度に調査できる。
【0033】
ここで、レーザー走査装置10は、三脚台の上で、鉛直軸まわりに回転し、かつ水平面に対して傾動可能とされるチルト台に設置されて用いられる。レーザー走査装置10は、図3に示す如く、鉛直高さ方向zに沿って上下動する各計測高さ位置で、水平面上における回転角α360度、水平面に対する傾角β100度(水平面に対して上向き+60度、下向き−40度)の走査領域に対し、レーザーLを一定のピッチ角γで照射する。レーザー走査装置10は、レーザーLの照射光L1が走査領域に存在する測定対象物(地表面E又は森林1の樹木2)の反射点P(x,y,z)で反射されたとき、その反射点Pからの反射光L2を受光する。レーザー走査装置10は、1つのレーザーLの照射から受光までの時間により、レーザー走査装置10の設置位置から反射点Pまでの距離を算出し、調査範囲における当該反射点Pの三次元座標化された位置(x,y,z)を算出する。
【0034】
また、レーザー走査装置10は、例えばRIEGL VZ-400(商品名)を採用でき、エコーデジタル処理とオンライン波形分析機能を具備する。これにより、レーザー走査装置10は、レーザーLの同一照射ライン上にある樹木の枝、葉、幹等の複数の反射点Pからのレーザー反射をデジタル処理して抽出し、波形分析することにより、それらの各反射点Pの三次元座標位置(x,y,z)を反射データとして高精度に算出できる。これにより、レーザー走査装置10は、細かな葉や枝の後ろ側にある物からの反射も把握でき、結果として1つの設置カ所から広範囲に、樹木の頂点も把握し得るような反射データの取得ができる。
【0035】
しかるに、レーザー走査装置10が上述の如くに算出したレーザーの反射データを取得したコンピュータは、本発明の三次元測定対象物、具体的には地表面Eと、その上の森林1の樹木2の形態を以下の手順で調査する。
【0036】
(1)コンピュータは、レーザー走査装置10(図2の格子の各交差点に配置された複数のレーザー走査装置10をいう、以下同じ)が、図2に示した調査範囲内で、地上物(森林1の樹木2)が存在する走査領域にレーザーLを照射したとき、該レーザーLの多数の反射点Pの各点を、三次元座標化された反射データの点(x,y,z)として取得する。コンピュータが取得したそのレーザーデータの点群は、地表面Eと森林1の各樹木2に対応する図4に示す如くの絵柄を描くものになる。
【0037】
コンピュータは、レーザー走査装置10が走査した調査範囲の水平面上に多数のグリッド、好適には10cm四方〜1m四方のグリッド、より好適には50cm四方のグリッドを派生させ、各グリッド(ピクセル)の中にある点群Pg(xg,yg,zg)の鉛直座標分布zgから標高値の最も低い低位点zLを抽出する。各グリッドで抽出された低位点zLを用いて、図5に示す如くの調査範囲の地形モデルDTM(Digital Terrain Model)を作成する。これにより、地表面からの反射データをそれ以外の植物等からの反射データと区別し得るものになる。
【0038】
尚、各グリッドで抽出された低位点zLのデータは図5(A)に示した如くのノイズ(地表面とは言えない突起物等)が多いデータであるから、画像フィルターを用いて、図5(B)に示す如くのノズルを低減したデータにする。ノイズの低減手法としては、データが欠損している場所(穴)には近隣の各ピクセルの低位点zLの平均値で補間し、ノイズがある場所では近隣の各ピクセルの低位点zLの平均値と比較してそのノイズを除去する。この画像フィルターを繰り返し導入することで、滑らかでノイズや穴のない地形モデルDTMを作成できる。
【0039】
(2)コンピュータは、上述(1)で調査範囲に派生させた各グリッドの中にある点群Pgのデータの鉛直座標分布zgから標高値の最も高い高位点zHを抽出する。各グリッドで抽出された高位点zHを用いて、調査範囲における地上物(森林1の樹木2)の表面モデルDSM(Digital Surface Model)を作成する。この表面モデルDSMは樹木2の樹冠の高さレベルを示すものになる。
【0040】
(3)コンピュータは、上述(1)の調査範囲に高さの異なる複数の地上物(森林1の樹木2)が存在するとき、該調査範囲における上述(2)の表面モデルDSMと上述(1)の地形モデルDTMの、各水平座標位置(x,y)での高さ(z)の差分を求めることにより、地表面の凹凸の影響を除いた図6(A)に示す如くの各地上物(樹木2)の高さだけを表す高さモデルDCM(Digital Canopy Model)を作成する。高さモデルDCMの上面は、各樹木2の樹高の最高点が形成する多数の山と、各山の間の谷とからなる。
【0041】
コンピュータは、高さモデルDCMにWatershed Segmentation法を適用し、高さモデルDCMに表れる各山の個々が、それらの周囲の谷により囲まれる水平座標(x,y)の範囲を、各地上物(樹木2)の占有範囲2A、2B、2C…として判別する。
【0042】
コンピュータは、このようにして判別された図6(B)に示す如くの各樹木2の占有範囲2A、2B、2C…の中にある点群Pwのデータに基づき、各樹木2を単木の単位にて図7(A)に示す如くに抽出する。コンピュータは、各樹木2の占有範囲2A、2B、2C…、及び各樹木2に属する点群Pwを、単木毎に互いに色分け表示できる。
【0043】
コンピュータは、各樹木2の占有範囲2A、2B、2C…にある点群Pw(xw,yw,zw)の鉛直座標分布zwから標高値の最も高い高位点(ピーク)を、当該樹木2の樹高として算定する。
【0044】
(4)コンピュータは、上述(3)により単木の単位にて抽出した樹木2の点群Pwの中で、前述の如く最高点(樹高計測箇所)を始点とし、Dijkstra法を用いて、樹幹3のデータを抽出し、該樹幹3の位置を判別する。
【0045】
このとき、Voxel法を以下の如くに併用することで、Dijkstra法の計算処理速度を向上させる。
【0046】
即ち、コンピュータは、単木の単位にて抽出した樹木2の最高点(樹高計測箇所)を始点とし、その地表点(樹木の地表にある点)を終点とする。そして、図7(B)に示す如く、樹木2の全点群Pwを複数の単位サイズの箱4により囲み分けする。更に、樹木2の始点と終点を結ぶ直線に対して最短距離にある各箱4を選択し、選択した各箱4を順につないだものを、図7(C)に示す如くの当該樹木2の樹幹3として判別する。
【0047】
(5)コンピュータは、上述(4)により判別した樹木2の樹幹3のデータを、一定間隔の高さ別に層状化し、高さの各層の中にある点群Ph(xh,yh,zh)を抽出し、この点群Phから各層の樹幹3の幹中心3C、幹周(樹幹3の周形状、周長)、幹直径及び/又は幹面積(樹幹3の断面積)等からなる幹データを算定する。
【0048】
このとき、樹木2の樹幹3が他の樹木2、枝葉等に邪魔され、幹周の一部しか、又は幹周の一側面しかレーザーが照射されず、当該樹幹3の幹周のレーザーデータが欠損している場合がある。安全な幹周のデータが得られなくても、樹幹3の幹中心3C、幹直径等を以下の如くに算定可能にした。
【0049】
即ち、コンピュータは、図8に示す如く、レーザーデータが幹周の一部で欠損していても、得られている幹周の点群Phを周方向にグループ分けし、各点群グループで主成分分析を行なう。各点群グループの第1主成分を求め、この第1主成分に直交する第2主成分を求める。各点群グループについて求めた第2主成分の交点を樹幹3の幹中心3Cとし、その幹中心3Cと周皮(幹周)(周皮からのレーザー反射)との距離を幹直径と推定する。また、樹幹3の幹直径から幹周、幹面積も算定できる。
【0050】
ここで、図9は、樹幹3の幹周のレーザーデータが欠損しているとき、幹周のレーザーデータが得られている幹中心まわりの角度範囲(幹周データ取得角度θ)と、これによって算定され得る幹中心が正しい中心に対するずれ量(幹中心ずれ量ΔC)との関係を調査した実験結果である。図9によれば、樹幹3の幹中心3Cを推定するに必要な幹周データ取得角度θは、好適には100度以上、より好適には150度以上であることが認められる。幹周データ取得角度θが150度以上であれば、10%のエラー内で正確な幹半径(幹直径)を得ることができる。但し、幹周データ取得角度θが上述の100度、150度というとき、それらの幹周データ取得角度θ内にデータが実質的に連続してあれば良く、幹周データ取得角度θ内におけるデータの僅かな欠けは許される。
【0051】
(6)コンピュータは、上述(5)により算定した樹木2の樹幹3の幹データに基づき、樹幹3の幹体積、及び/又は幹高さ方向の幹曲がり(歪み、反り等を含む)を算定する。
【0052】
即ち、樹木2の樹幹3の各層の幹面積を各層の間隔で積分する如くに重ね合せることにより、樹幹3の幹体積を算定できる。また、樹木2の樹幹3の各層の幹中心3Cを高さ方向に重ね合せることにより、樹幹3の幹高さ方向の幹曲がりを算定できる。
【0053】
樹木2の樹幹3について取得した図10(A)のレーザーデータに対し、本発明方法により算定した樹幹3の高さ方向の各層の幹周形態を図10(B)に示し、各層の幹半径、幹体積を図10(A)に示す。本発明方法により、樹木2の樹幹3の形態を実物に対し違和感なく正確に毎木調査できることを認めた。
【0054】
従って、本発明によれば、地表面、地物、構造物等の地形データを取得するとともに、地表面の上の立木である各樹木2の位置、その樹幹3の樹高、幹直径、幹体積、曲がりや反り等の品質を併せてデータ化し、立木を切り倒すことなく、調査範囲の森林1の全体に渡る樹木2の形態を調査し、森林価値を算定できる。森林1の全体に渡る各樹木2の調査結果は、間伐材の効果的な選択、効率的な作業路線の計画立案等の作業ステップでも利用でき、林業の更なる情報化を促進する。
【0055】
また、森林1の全体に渡る各樹木2の樹幹3の幹直径、幹体積、幹曲がりを、直接計測によって定量化できる特異性、優位性は高い。そして、各樹木2の樹幹3の正しく算定された幹体積からその質量を正しく把握でき、この幹質量に樹種による枝葉と根の拡大係数、及び炭素係数を用いることで、当該樹木2による二酸化炭素の吸収量を高精度に求め、ひいてはカーボンクレジットの制度を利用し、森林の管理資金を安定的に調達できる。循環型環境社会に適合する新たな林業経営にも大きく寄与できる。
【0056】
ここで、本発明は、コンピュータをして、上述(1)〜(6)の各手順を実行する手段として機能させるためのプログラムを含む。
【0057】
以上、本発明の実施例を図面により詳述したが、本発明の具体的な構成はこの実施例に限られるものではなく、本発明の要旨を逸脱しない範囲の設計の変更等があっても本発明に含まれる。例えば、本発明は航空機レーザー装置を用いた三次元測定対象物の形態調査方法にも適用できる。また、測定対象物を地表面の上の車両、建築物、構造物、人等の動物とするものにも適用できる。
【産業上の利用可能性】
【0058】
本発明は、三次元測定対象物の形態調査方法であり、測定対象物を森林の樹木とするとき、以下の如くに、自動で毎木調査できる。即ち、レーザー走査装置から照射されたレーザーの反射点の点群を入力として地形モデルDTM、表面モデルDSMを作成し、それらの差分からその樹木の高さだけを表す高さモデルDCMを作成する。作成された高さモデルDCMに例えばWatershed Segmentation法を適用することで各樹木の単木単位の占有範囲を算定し、この占有範囲にある点群に例えばDijkstra法を適用することで各樹木の樹幹を他の部分と判別する。各樹木の樹幹を高さ別に層状化し、各層の点群から樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する。更に、幹データに基づき、樹幹の幹体積、及び/又は幹曲がりを算定するものである。
【符号の説明】
【0059】
1 森林
2 樹木
3 樹幹
10 レーザー走査装置
【特許請求の範囲】
【請求項1】
レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、
前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する三次元測定対象物の形態調査方法。
【請求項2】
前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する請求項1に記載の三次元測定対象物の形態調査方法。
【請求項3】
前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成し、
高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする請求項2に記載の三次元測定対象物の形態調査方法。
【請求項4】
前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する請求項3に記載の三次元測定対象物の形態調査方法。
【請求項5】
請求項4に記載の三次元測定対象物の形態調査方法であって、単木の単位にて抽出した樹木の最高点を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する三次元測定対象物の形態調査方法。
【請求項6】
前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する請求項5に記載の三次元測定対象物の形態調査方法。
【請求項7】
前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する請求項6に記載の三次元測定対象物の形態調査方法。
【請求項8】
前記レーザー走査装置が地表面に設置されてなる請求項1〜7のいずれかに記載の三次元測定対象物の形態調査方法。
【請求項9】
請求項8に記載の三次元測定対象物の形態調査方法が適用される調査範囲の地表面に縦横一定間隔をなす格子を想定し、格子の各交差点にレーザー走査装置を配置する請求項8に記載の三次元測定対象物の形態調査方法。
【請求項10】
コンピュータを、
レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得する手段と、
前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する手段
として機能させるためのプログラム。
【請求項11】
前記コンピュータを、
前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する手段
として機能させるための請求項10に記載のプログラム。
【請求項12】
前記コンピュータを、
前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成する手段と、
高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする手段
として機能させるための請求項11に記載のプログラム。
【請求項13】
前記コンピュータを、
前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する手段
として機能させるための請求項12に記載のプログラム。
【請求項14】
前記コンピュータを、
単木の単位にて抽出した樹木の最高点を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する手段
として機能させるための請求項13に記載のプログラム。
【請求項15】
前記コンピュータを、
前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する手段
として機能させるための請求項14に記載のプログラム。
【請求項16】
前記コンピュータを、
前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する手段
として機能させるための請求項15に記載のプログラム。
【請求項1】
レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、
前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する三次元測定対象物の形態調査方法。
【請求項2】
前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する請求項1に記載の三次元測定対象物の形態調査方法。
【請求項3】
前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成し、
高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする請求項2に記載の三次元測定対象物の形態調査方法。
【請求項4】
前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する請求項3に記載の三次元測定対象物の形態調査方法。
【請求項5】
請求項4に記載の三次元測定対象物の形態調査方法であって、単木の単位にて抽出した樹木の最高点を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する三次元測定対象物の形態調査方法。
【請求項6】
前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する請求項5に記載の三次元測定対象物の形態調査方法。
【請求項7】
前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する請求項6に記載の三次元測定対象物の形態調査方法。
【請求項8】
前記レーザー走査装置が地表面に設置されてなる請求項1〜7のいずれかに記載の三次元測定対象物の形態調査方法。
【請求項9】
請求項8に記載の三次元測定対象物の形態調査方法が適用される調査範囲の地表面に縦横一定間隔をなす格子を想定し、格子の各交差点にレーザー走査装置を配置する請求項8に記載の三次元測定対象物の形態調査方法。
【請求項10】
コンピュータを、
レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得する手段と、
前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する手段
として機能させるためのプログラム。
【請求項11】
前記コンピュータを、
前記調査範囲に派生させた各グリッドの中にある点群の鉛直座標分布から標高値の最も高い高位点を抽出し、各グリッドで抽出された高位点を用いて調査範囲における地上物の表面モデルを作成する手段
として機能させるための請求項10に記載のプログラム。
【請求項12】
前記コンピュータを、
前記調査範囲に高さの異なる複数の地上物が存在するとき、該調査範囲における表面モデルと地形モデルの差分を求めることにより、地表面の凹凸の影響を除いた各地上物の高さだけを表す高さモデルを作成する手段と、
高さモデルに表われる各山の個々が谷により囲まれる水平範囲を、各地上物の占有範囲とする手段
として機能させるための請求項11に記載のプログラム。
【請求項13】
前記コンピュータを、
前記地上物を森林内の樹木とし、森林を構成する各樹木の占有範囲に基づいて各樹木を単木の単位にて抽出する手段
として機能させるための請求項12に記載のプログラム。
【請求項14】
前記コンピュータを、
単木の単位にて抽出した樹木の最高点を始点とし、その地表点を終点とするとともに、該樹木の全点群を複数の単位サイズの箱により囲み分けし、該樹木の始点と終点を結ぶ直線に対して最短距離にある各箱を選択し、選択した各箱を順につないだものを該樹木の樹幹と判別する手段
として機能させるための請求項13に記載のプログラム。
【請求項15】
前記コンピュータを、
前記樹木の樹幹を高さ別に層状化し、高さの各層の中にある点群から、各層の樹幹の幹中心、幹周、幹直径、及び/又は幹面積からなる幹データを算定する手段
として機能させるための請求項14に記載のプログラム。
【請求項16】
前記コンピュータを、
前記幹データに基づき、樹幹の幹体積、及び/又は幹高さ方向の曲がりを算定する手段
として機能させるための請求項15に記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−88188(P2013−88188A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227165(P2011−227165)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(511249132)富士設計株式会社 (1)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(511249132)富士設計株式会社 (1)
【Fターム(参考)】
[ Back to top ]