
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラムに関する。
【背景技術】
【0002】
従来、動的シーンに対応した三次元計測装置において、複数スリットを投影した光切断法が知られている。複数スリットを投影した光切断法は一般的に全て同一形状のスリットを投影する。そのため、測定距離範囲に限定を加えるなどしない限り、撮像されたスリットと投影されたスリットとを一意に対応付ける事は困難である。
【0003】
そこで、特許文献1に記載の手法では、複数スリットに加えて、投影軸及び視軸の少なくとも1つの点によって形成された平面に直交して変動する少なくとも1つの構成要素を備えた少なくとも1つのコード化された特徴部を有する画像を投影し、そして、撮像された特徴部から符号を抽出し、投影側の符号と比較する。この比較結果に基づいて、撮像されたスリットと投影されたスリットとの対応付けを行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−276743号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の構成では、撮影装置の光学系によるボケや投影装置の光学系によるボケの要因で、隣接した符号同士が重畳してしまう可能性がある。また、投影軸及び視軸の少なくとも1つの点によって形成された平面に直交して変動する特徴を抽出するため、特徴同士が重なり合うと符号が判別できなくなり、計測不可能な領域が発生してしまう可能性がある。すなわち、特許文献1に記載の構成では、特徴の認識性能が低下する可能性があるという課題がある。
【0006】
上記の課題に鑑み、本発明は、より特徴の認識性能を向上することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成する本発明に係る三次元計測装置は、
計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影手段と、
前記パターンが投影された前記被写体を撮像する撮像手段と、
前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像手段により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化手段と、
前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識手段と、
前記特徴認識手段により認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、より特徴の認識性能を向上することが可能となる。
【図面の簡単な説明】
【0009】
【図1】三次元計測装置の全体構成を示す図。
【図2】第1実施形態に係る三次元計測装置の投影パターンを示す図。
【図3】特徴認識部106による認識処理の説明図。
【図4】特徴認識部106による認識処理の説明図。
【図5】特徴認識部106による認識処理の説明図。
【図6】三次元計測装置の処理の手順を示すフローチャート。
【図7】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図8】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図9】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図10】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図11】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図12】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図13】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図14】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【発明を実施するための形態】
【0010】
(第1実施形態)
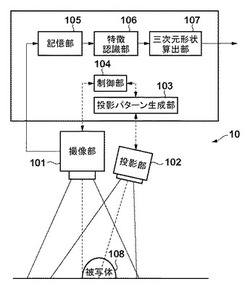
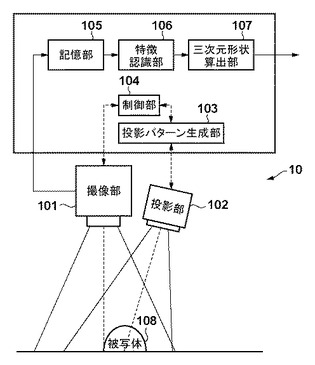
図1を参照して、本実施形態に係る三次元計測装置10の構成を説明する。本実施形態に係る三次元計測装置10は、撮像部101と、投影部102と、投影パターン生成部103と、制御部104と、記憶部105と、特徴認識部106と、三次元形状算出部107とを備える。 撮像部101は、光学系と撮像素子とを有し、被写体108を撮像する。また、撮像部101は、撮像した画像を記憶部105に出力する。また、撮像部101は、投影部102の投影方向とは異なる方向から被写体108を撮像する。
【0011】
投影部102は、レーザープロジェクタや液晶プロジェクタなどのパターンを投影可能であり、パターンを投影可能であれば投影部102の構成は限定されない。投影部102は、投影パターン生成部103から入力されるパターンの情報に基づいて、被写体108へパターンを投影する。
【0012】
投影パターン生成部103は、投影部102が被写体108へ投影するパターンを生成する。制御部104は、投影パターン生成部103によるパターンの投影タイミングを制御する。また、制御部104は、投影部102がパターンの投影を開始するタイミングに基づいて、撮像を開始するように撮像部101を制御する。
【0013】
記憶部105は、撮像部101から取得した撮像画像を記憶するメモリである。そしてその撮像画像を特徴認識部106へ出力する。
【0014】
特徴認識部106は、記憶部105から取得した撮像画像から計測用パターンと特徴パターンとを抽出して特徴を認識する。認識された特徴に基づいて、特徴認識部106は、符号列を生成し、三次元形状算出部107へ出力する。
【0015】
三次元形状算出部107は、特徴認識部106から取得した符号列と、パターンを構成する元の符号列との対応関係から、撮像部101により撮像される計測用パターンの位置と、投影部102により投影される計測用パターンの位置とを対応付ける。そして、対応付けられた計測用パターン同士の位置に基づいて三角測量の原理で三次元形状を算出する。
【0016】
まず図2(a)および図2(b)を参照して、投影パターン生成部103により生成されるパターンの一例について説明する。
【0017】
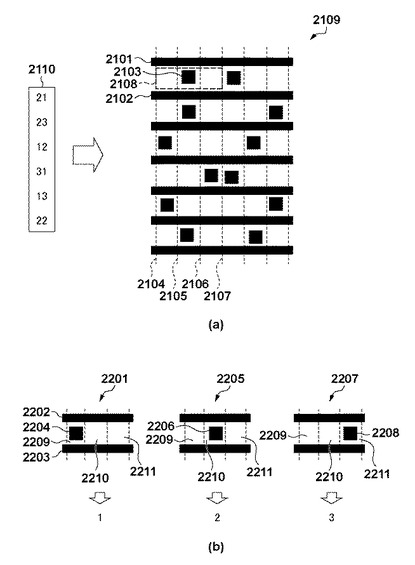
図2(a)において、投影パターン生成部103により生成されるパターンはパターン2109のようなパターンである。パターン2109の一部は、計測用パターン2101、計測用パターン2102、および特徴パターン2103により構成されている。ここで、図2(a)の計測用パターン2101および計測用パターン2102は、例えばスリットパターンである。また、計測用パターンと、特徴パターンとは、同時に被写体108へ投影してもよいし、順次切り替えて別々に投影することも可能である。パターン2109は、符号列2110に基づいて生成される特徴パターンである。ここで、符号列2110は、例えば、M系列(Maximum length sequence)でもよいし、デブルーイン系列(de Bruijin sequence)でもよい。M系列とは、最大周期列といわれる疑似乱数列のひとつである。また、デブルーイン系列は,周期系列であり、長さnの部分系列を観測すれば、系列中の位置が一意に特定可能という特徴を有する符号列である。符号列2110として、M系列やデブルーイン系列以外の符号列を用いてもよいが、任意で選択した部分系列が他の部分系列に対して一意に特定可能であることが望ましい。
【0018】
次に、パターン2109を構成するために配置された特徴パターンについて説明する。
【0019】
図2(a)において、エピポーラ線2104、2105、2106、および2107は、撮像部101と投影部102との位置関係によって決定されるエピポーラ平面と、投影部102の投影素子とが交わる線である。エピポーラ線2104、2105、2106、および2107は、実際にはパターン2109を構成する線としては表示されないが、特徴パターンの説明の為に、点線で表示している。またグループ2108は、エピポーラ線2104、2105、2106、および2107と、計測用パターン2101および計測用パターン2102と、により囲まれる3つの領域をグループ化して点線で示した領域である。グループ2108と同形状のグループが、パターン2109中に複数配置されており、一つのグループに対して、符号列2110の中の対応する1つの符号が割り当てられている。
【0020】
次に図2(b)を参照して、グループ2108における符号に対する特徴の種類について説明する。パターン2201、パターン2205、およびパターン2207は、グループ2108における異なる種類の特徴を表している。パターン2201、パターン2205、およびパターン2207には、スリット2202と、スリット2203と、撮像部101と投影部102とによって決定されるエピポーラ線と、により囲まれる領域2209、領域2210、領域2211が定義されている。パターン2201では、領域2209に特徴パターン2204が、パターン2205では、領域2210に特徴パターン2206が、パターン2207では、領域2211に特徴パターン2208がそれぞれ配置されている。パターン2201、パターン2205、およびパターン2207では、領域2209、領域2210、および領域2211の各面積と、領域2209、領域2210、および領域2211上の各特徴パターンの面積の比の差異により3種類に識別できる。
【0021】
加えて、パターン2201、パターン2205、およびパターン2207において、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付ける事も可能である。
【0022】
さらに、投影パターン生成部103は、必ずしも三次元計測装置10の一部である必要はなく、本発明で説明する各種投影パターンを生成する投影パターン生成装置(情報処理装置)として独立して使用することが可能である。投影パターン生成部103を独立した投影パターン生成装置として用いる場合、生成される投影パターンは、必ずしもエピポーラ線で領域を区切られる必要はなく、計測用パターンと異なる方向の区画線で区切れられていればよい。
【0023】
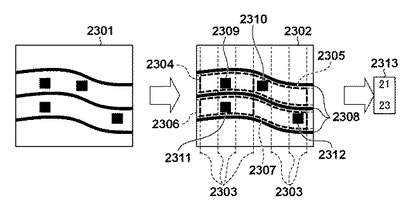
次に、図3および図4(a)−(d)を参照して、特徴認識部106について説明する。図3において、記憶部105から取得した画像2301についてパターン抽出を行い、計測用パターンと特徴パターンとを抽出した画像が2302である。複数のエピポーラ線2303と、計測用パターン2308とによりパターンを分割して、複数の領域を定義する。さらに分割された複数の領域のうち所定の領域をグループ化し、グループ2304、グループ2305、グループ2306、グループ2307を定義する。すなわち、分割された複数の領域のうち計測用パターンの方向に隣接している複数の領域を1つのグループとしてグループ化する。グループ2304、グループ2305、グループ2306、グループ2307には、それぞれ特徴パターン2309、特徴パターン2310、特徴パターン2311、特徴パターン2312が配置されている。各グループにおいて、グループ内の各領域の面積とグループ内の各領域上の特徴パターンの面積の比に基づき、特徴を認識して、符号を割りつける。なお、領域分割処理と、グループ化処理とは、特徴認識部106が行う処理であってもよいが、別の処理部を設けて当該別の処理部により実行されてもよい。その場合特徴認識部106は、各グループにおいて、グループ内の各領域の面積とグループ内の各領域上の特徴パターンの面積の比に基づき、特徴を認識して、符号を割りつける処理のみを実行することになる。
【0024】
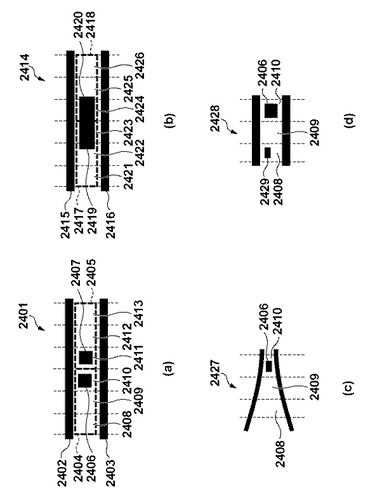
ここで、図4(a)−(d)を参照して、特徴の認識方法について詳細に説明する。まず図4(a)において、パターン2401は、計測用パターン2402、計測用パターン2403と、特徴パターン2406、特徴パターン2407とにより構成されている。また、計測用パターン2402、計測用パターン2403と、エピポーラ線とにより区切られた領域2408、領域2409、領域2410、領域2411、領域2412、領域2413を定義することができる。加えて、領域2408、領域2409、領域2410をグループ化してグループ2404を定義する。また、領域2411、領域2412、領域2413をグループ化してグループ2405を定義する。
【0025】
まず、グループ2404の特徴についての認識方法を説明する。グループ2404を構成する、領域2408、領域2409、領域2410の面積を求める。次に領域2408、領域2409、領域2410内の特徴パターン2406の面積を求める。領域2408、領域2409、領域2410の面積と、領域2408、領域2409、領域2410内の特徴パターン2406の面積との比を求め、他の領域と比べて特徴パターン2406の面積の占める領域が大きい領域に特徴パターンが存在すると認識できる。同様にグループ2405では、領域2411に特徴パターンが存在すると認識される。
【0026】
ここで、特徴パターンと領域との面積の比を用いたパターンの認識方法について具体的な面積値を用いて説明する。パターン2401のグループ2404において、特徴パターン2406の面積が2、領域2408、領域2409、領域2410の面積が、全て4だとする。そして、各領域2408、領域2409、領域2410に領域上の特徴パターンの面積を各領域の面積で除算する。その結果、特徴パターンと領域との面積の比は、領域2408と領域2409が0(0/4)、領域2410が1/2(2/4)になる。各領域の面積の比を比べると領域2410が最も面積の比が大きい事が分かる。よって、領域2410上に特徴パターン2406が存在すると推定できる。ここで、領域間で面積の比の差異を大きくすることで特徴パターンの認識率が向上する。そのため、投影パターン生成部103により生成される特徴パターンの形状がエピポーラ線に対して平行または略平行な方向に延びていると領域内での面積を大きく配置することが可能であり、認識率を向上させることができる。
【0027】
次に、図4(b)を参照して、撮像部101の光学系によるボケの影響や、投影部102の光学系によるボケの影響によって、特徴パターン同士が重なり合う場合について説明する。パターン2414は、計測用パターン2415、計測用パターン2416と、特徴パターン2419、特徴パターン2420とにより構成されている。特徴パターン2419と特徴パターン2420とは、ボケの影響により、パターン同士が重畳している。また、計測用パターン2415、計測用パターン2416とエピポーラ線とにより区切られた領域2421、領域2422、領域2423、領域2424、領域2425、領域2426を定義することができる。加えて、領域2421、領域2422、領域2423をグループ化してグループ2417を定義する。また、領域2424、領域2425、領域2426をグループ化してグループ2418を定義する。
【0028】
まず、グループ2417の特徴について認識方法を説明する。最初に、グループ2417を構成する、領域2421、領域2422、領域2423の各面積を求める。次に領域2421、領域2422、領域2423内の特徴パターン2419の面積を求める。領域2421、領域2422、領域2423の面積と、領域2421、領域2422、領域2423内の特徴パターン2419の面積との比を求め、他の領域と比べて特徴パターン2419の面積の占める領域が大きい領域に特徴パターンが存在すると認識する。つまり、グループ2417では、領域2423に特徴パターンが存在すると認識される。ここで、ボケにより、特徴パターン2419が領域2422の小領域に特徴パターンが存在したとしても、領域2422では、他の領域と比べて特徴パターン2419の面積の占める領域が少ない為、正確に特徴を認識できる。同様にグループ2418では、領域2424に特徴パターンが存在すると認識される。このように本実施形態に係る三次元計測装置は、撮像部101の光学系によるボケの影響や、投影部102の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性が向上する。
【0029】
次に、図4(c)−(d)を参照して、領域の面積と特徴パターンの面積との比を用いることによる特徴認識について説明する。領域の面積と特徴パターンの面積との比を用いることによって、図4(c)に示すようなパターン2427、および、図4(d)に示すようなパターン2428の場合でも特徴を認識できる。パターン2427のように被写体108の形状に起因して特徴パターン2406の面積が減少した場合においても、撮像部101と投影部102との幾何的関係から、領域2410の面積も減少する。そのため、面積の比はパターン2401のグループ2404の領域2410の面積と特徴パターン2406の面積の比と同様の値となり、パターン2427においても特徴パターンが配置された領域を認識可能である。もちろん被写体108の形状がある程度平面に近ければ、領域の面積と特徴パターンの面積との比ではなく、特徴パターンの面積自体を比較することによって特徴パターンが存在する領域を認識してもよい。また、パターン2428において、撮影時のノイズにより、ノイズ2429が加えられたとする。その場合でも各領域の面積と特徴パターンの面積との面積の比を比べると領域2410が最も面積の比が大きいことから特徴パターンが配置された領域を認識可能である。
【0030】
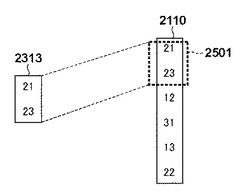
再び図3に戻ると、特徴認識部106は、グループ2304、グループ2305、グループ2306、グループ2307のグループ毎に認識された特徴の認識結果として、符号列2313を生成する。図3の例では、グループ2304については2、グループ2305については1、グループ2306については2、グループ2307については3である。特徴認識部106は、生成された符号列2313を、三次元形状算出部107へ出力する。
【0031】
図5を参照して、三次元形状算出部107について説明する。三次元形状算出部107は、特徴認識部106から符号列2313を取得する。次に、図2(a)で示したパターン2109を構成する元の符号列2110と、符号列2313との対応を探索し、図5の点線で囲まれる対応位置2501を導く。符号列同士の対応から撮像部101により撮像される計測用パターンの位置と、投影部102により投影される計測用パターンの位置とが対応付けられる。そして、上述したように、対応付けられた計測用パターンの位置に基づいて三角測量の原理で被写体108の三次元形状を算出する。ここで、三角測量の基本的な原理には、特許文献2に開示されている。
【0032】
次に、図6のフローチャートを参照して、本実施形態に係る三次元計測装置の処理の手順を説明する。
【0033】
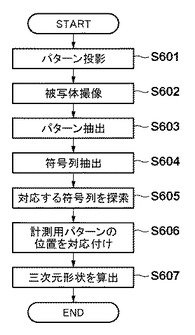
S601において、投影部102は、制御部104により投影パターン生成部103へ送信されたパターンを出力するための信号に基づいて投影パターン生成部103が生成するパターンを、被写体108へ投影する。S602において、撮像部101は、制御部104により撮像部101へ、投影が開始されるタイミングで送信された撮像信号に基づいて、被写体108を撮像する。また、撮像部101は、撮像画像を記憶部105に記憶する。
【0034】
S603において、特徴認識部106は、記憶部105から取得した撮像画像から、計測用パターンと特徴パターンとを抽出する。S604において、特徴認識部106は、S603で抽出された計測用パターンと特徴パターンとから符号列を抽出し、当該符号列を三次元形状算出部107へ出力する。
【0035】
S605において、三次元形状算出部107は、抽出された符号列と対応する符号列を探索する。S606において、三次元形状算出部107は、撮像部101により撮像された計測用パターンの位置と、投影部102により投影される計測用パターンの位置とを対応付ける。
【0036】
S607において、三次元形状算出部107は、対応付けられた計測用パターンの位置と、撮像部101および投影部102の位置関係と、に基づいて三角測量の原理で被写体108の三次元形状を算出する。以上で図6のフローチャートの各処理が終了する。
【0037】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0038】
(第2実施形態)
本実施形態に係る三次元計測装置は、第1実施形態で説明した三次元計測装置10の構成と同様であるため説明を省略する。図7(a)−(b)、図8(a)−(b)、および図9(a)−(b)を参照して、本実施形態に係る投影パターン生成部103により生成されるパターンについて、図2(a)のパターン2109で説明したグループ2108の定義とは異なるグループの定義の仕方を説明する。
【0039】
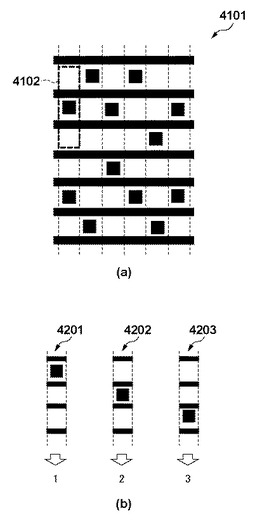
まず図7(a)のパターン4101に対して、グループ4102のように、計測用パターンに対して垂直方向にグループを定義している。すなわち、複数の領域のうちエピポーラ線の方向に隣接している複数の領域を1つのグループとしてグループ化する。これにより、グループ4102において、図7(b)に示されるパターン4201、パターン4202、パターン4203のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付けることが可能である。ここではパターン4201に対して1、パターン4202に対して2、パターン4203に対して3が対応づけられる。
【0040】
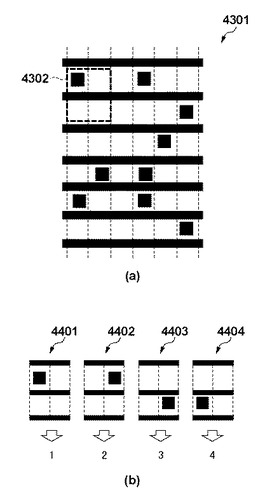
次に図8(a)のパターン4301に対して、グループ4302のように、計測用パターンに対して平行方向かつ垂直方向に渡る所定の領域をグループとして定義している。すなわち、複数の領域のうち計測用パターンの方向およびエピポーラ線の方向に隣接している複数の領域を矩形領域としてグループ化する。これにより、グループ4302において、図8(b)に示されるパターン4401、パターン4402、パターン4403、パターン4404のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3、4のような数字を対応付けることが可能である。ここではパターン4401に対して1、パターン4402に対して2、パターン4403に対して3、パターン4404に対して4が対応づけられる。
【0041】
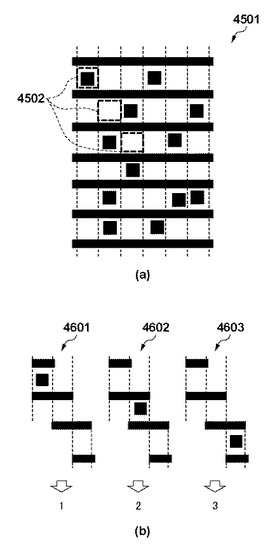
次に図9(a)のパターン4501に対して、グループ4502のように、計測用パターンに対して斜め方向に存在する所定の領域をグループとして定義している。すなわち、複数の領域のうち計測用パターンの方向またはエピポーラ線の方向の何れの方向にも隣接していない斜め方向の複数の領域をグループ化する。なお、斜め方向であれば、45度方向または135度方向に限定されない。グループは、座標系を定義した場合、45度方向ならx方向に1ブロックかつy方向に1ブロックずれた方向(1、1方向)にある複数の領域であるが、例えばx方向に2ブロックかつy方向に1ブロックずれた方向(2、1方向)にある複数の領域をグループ化してもよい。これにより、グループ4502において、図9(b)に示されるパターン4601、パターン4602、パターン4603のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付けることが可能である。ここではパターン4601に対して1、パターン4602に対して2、パターン4603に対して3が対応づけられる。
【0042】
また、図2(b)における、隣接する領域2209、2210、2211は、必ずしも隣接している必要はなく、領域2209と2210の間、領域2210、2211の間にグループ化されていない領域を間に挿入しても良い。グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、被写体108の連続している面の面積に基づいて決定しても良い。ここで、図3の2301のように物体の形状により、投影されるパターンが、歪むため、グループ化される領域同士の間隔は連続している面の面積が投影されるパターンと比較して相対的に小さい場合は、グループ化される領域同士の間隔を小さくすることで、同一グループとして認識可能である可能性が高くなる。
【0043】
加えて、グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、被写体108の形状に基づいて決定しても良い。形状の起伏が大きい場合、グループ化される領域同士の間隔を小さくすることで、同一グループとして認識可能である可能性が高くなる。
【0044】
また、グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、撮像手段の解像度に基づいて決定しても良い。撮像手段の解像度がパターンの特徴パターンの配置される間隔と比べて低い場合、グループ化される領域同士の間隔を広げる事で同一グループとして認識可能である可能性が高くなる。
【0045】
このように近傍のいくつかの領域をグループとして定義することによって、被写体108が連続した表面部分をあまり有しないような形状であっても、効率的に符号を抽出できる。本実施形態で説明したパターンを用いて、第1実施形態で説明したように被写体108の三次元形状を算出できる。
【0046】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0047】
(第3実施形態)
本実施形態に係る三次元計測装置は、第1実施形態で説明した三次元計測装置10の構成と同様であるため説明を省略する。図10乃至図14を参照して、本実施形態に係る投影パターン生成部103により生成されるパターンについて、図2(a)のパターン2109で説明した特徴パターン2103とは異なる特徴パターンを説明する。
【0048】
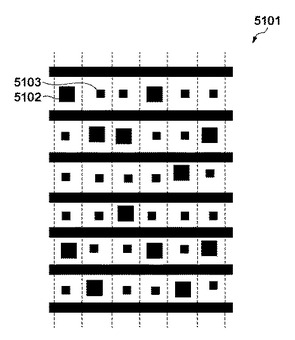
図10に示すパターン5101のように、投影パターン生成部103により生成されるパターンは、特徴パターン5102と特徴パターン5103とで特徴パターンの面積に差異のある特徴パターンを用いてもよい。また、特徴パターンの差異は、グループ化された複数の領域のそれぞれに配置された特徴パターンの、エピポーラ線と平行方向の長さの差異であってもよい。図10の例では、特徴パターン5102と特徴パターン5103とでエピポーラ線と平行方向の長さに差異がある。すなわち特徴パターンの面積の差異またはエピポーラ線と平行方向の長さの差異により特徴を認識することができる。
【0049】
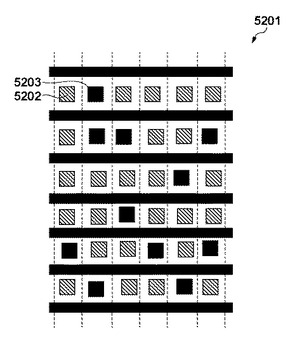
また、図11に示すパターン5201のように、投影パターン生成部103により生成されるパターンは、特徴パターン5202と特徴パターン5203とで特徴の光の波長または光の輝度に差異のある特徴パターンを用いてもよい。すなわち、光の波長の差異または光の輝度の差異に基づいて特徴を認識することができる。
【0050】
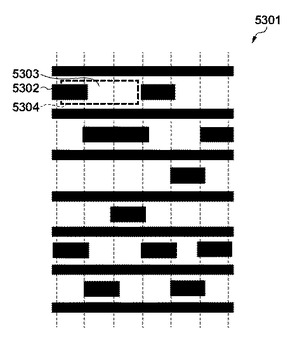
また、図12に示すパターン5301のように、投影パターン生成部103により生成されるパターンは、特徴パターン5302が近傍領域5303に重畳していてもよい。特徴認識部106は、定義されたグループ5304内の領域で特徴の差異が存在すれば、特徴パターン同士が重畳していても特徴を認識できる。
【0051】
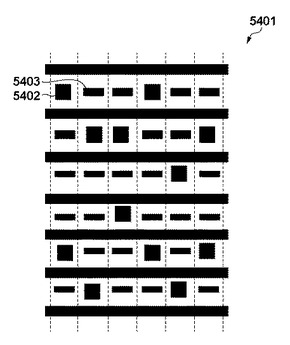
また、図13に示すパターン5401のように、投影パターン生成部103により生成されるパターンは、特徴パターン5402と特徴パターン5403とで、エピポーラ線と平行方向に差異のある特徴を用いてもよい。図13の場合、特徴パターン5402は面積が特徴パターン5403よりも大きい。
【0052】
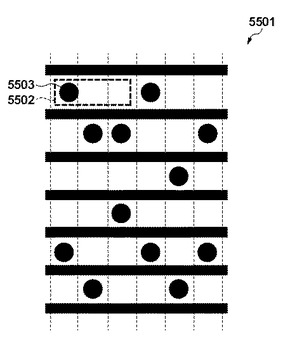
また、図14に示すパターン5501のように、投影パターン生成部103により生成されるパターンは、図2(a)のグループ2108の特徴パターン2103を、特徴パターン5503のように形状を円形に変えた特徴パターンである。特徴パターン5503は、グループ5502の中で特徴の面積に差異がある。そのため、特徴の形状が異なる場合でも特徴を認識可能であり、投影パターン生成部103を用いて生成されるパターンは、特徴パターン5503を用いてもよい。
【0053】
本実施形態で説明したパターンを用いて、第1実施形態で説明したように被写体108の三次元形状を算出できる。
【0054】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0055】
(その他の実施形態)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【技術分野】
【0001】
本発明は、三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラムに関する。
【背景技術】
【0002】
従来、動的シーンに対応した三次元計測装置において、複数スリットを投影した光切断法が知られている。複数スリットを投影した光切断法は一般的に全て同一形状のスリットを投影する。そのため、測定距離範囲に限定を加えるなどしない限り、撮像されたスリットと投影されたスリットとを一意に対応付ける事は困難である。
【0003】
そこで、特許文献1に記載の手法では、複数スリットに加えて、投影軸及び視軸の少なくとも1つの点によって形成された平面に直交して変動する少なくとも1つの構成要素を備えた少なくとも1つのコード化された特徴部を有する画像を投影し、そして、撮像された特徴部から符号を抽出し、投影側の符号と比較する。この比較結果に基づいて、撮像されたスリットと投影されたスリットとの対応付けを行っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−276743号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の構成では、撮影装置の光学系によるボケや投影装置の光学系によるボケの要因で、隣接した符号同士が重畳してしまう可能性がある。また、投影軸及び視軸の少なくとも1つの点によって形成された平面に直交して変動する特徴を抽出するため、特徴同士が重なり合うと符号が判別できなくなり、計測不可能な領域が発生してしまう可能性がある。すなわち、特許文献1に記載の構成では、特徴の認識性能が低下する可能性があるという課題がある。
【0006】
上記の課題に鑑み、本発明は、より特徴の認識性能を向上することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成する本発明に係る三次元計測装置は、
計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影手段と、
前記パターンが投影された前記被写体を撮像する撮像手段と、
前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像手段により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化手段と、
前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識手段と、
前記特徴認識手段により認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出手段と、
を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、より特徴の認識性能を向上することが可能となる。
【図面の簡単な説明】
【0009】
【図1】三次元計測装置の全体構成を示す図。
【図2】第1実施形態に係る三次元計測装置の投影パターンを示す図。
【図3】特徴認識部106による認識処理の説明図。
【図4】特徴認識部106による認識処理の説明図。
【図5】特徴認識部106による認識処理の説明図。
【図6】三次元計測装置の処理の手順を示すフローチャート。
【図7】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図8】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図9】第2実施形態に係る三次元計測装置の投影パターンを示す図。
【図10】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図11】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図12】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図13】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【図14】第3実施形態に係る三次元計測装置の投影パターンを示す図。
【発明を実施するための形態】
【0010】
(第1実施形態)
図1を参照して、本実施形態に係る三次元計測装置10の構成を説明する。本実施形態に係る三次元計測装置10は、撮像部101と、投影部102と、投影パターン生成部103と、制御部104と、記憶部105と、特徴認識部106と、三次元形状算出部107とを備える。 撮像部101は、光学系と撮像素子とを有し、被写体108を撮像する。また、撮像部101は、撮像した画像を記憶部105に出力する。また、撮像部101は、投影部102の投影方向とは異なる方向から被写体108を撮像する。
【0011】
投影部102は、レーザープロジェクタや液晶プロジェクタなどのパターンを投影可能であり、パターンを投影可能であれば投影部102の構成は限定されない。投影部102は、投影パターン生成部103から入力されるパターンの情報に基づいて、被写体108へパターンを投影する。
【0012】
投影パターン生成部103は、投影部102が被写体108へ投影するパターンを生成する。制御部104は、投影パターン生成部103によるパターンの投影タイミングを制御する。また、制御部104は、投影部102がパターンの投影を開始するタイミングに基づいて、撮像を開始するように撮像部101を制御する。
【0013】
記憶部105は、撮像部101から取得した撮像画像を記憶するメモリである。そしてその撮像画像を特徴認識部106へ出力する。
【0014】
特徴認識部106は、記憶部105から取得した撮像画像から計測用パターンと特徴パターンとを抽出して特徴を認識する。認識された特徴に基づいて、特徴認識部106は、符号列を生成し、三次元形状算出部107へ出力する。
【0015】
三次元形状算出部107は、特徴認識部106から取得した符号列と、パターンを構成する元の符号列との対応関係から、撮像部101により撮像される計測用パターンの位置と、投影部102により投影される計測用パターンの位置とを対応付ける。そして、対応付けられた計測用パターン同士の位置に基づいて三角測量の原理で三次元形状を算出する。
【0016】
まず図2(a)および図2(b)を参照して、投影パターン生成部103により生成されるパターンの一例について説明する。
【0017】
図2(a)において、投影パターン生成部103により生成されるパターンはパターン2109のようなパターンである。パターン2109の一部は、計測用パターン2101、計測用パターン2102、および特徴パターン2103により構成されている。ここで、図2(a)の計測用パターン2101および計測用パターン2102は、例えばスリットパターンである。また、計測用パターンと、特徴パターンとは、同時に被写体108へ投影してもよいし、順次切り替えて別々に投影することも可能である。パターン2109は、符号列2110に基づいて生成される特徴パターンである。ここで、符号列2110は、例えば、M系列(Maximum length sequence)でもよいし、デブルーイン系列(de Bruijin sequence)でもよい。M系列とは、最大周期列といわれる疑似乱数列のひとつである。また、デブルーイン系列は,周期系列であり、長さnの部分系列を観測すれば、系列中の位置が一意に特定可能という特徴を有する符号列である。符号列2110として、M系列やデブルーイン系列以外の符号列を用いてもよいが、任意で選択した部分系列が他の部分系列に対して一意に特定可能であることが望ましい。
【0018】
次に、パターン2109を構成するために配置された特徴パターンについて説明する。
【0019】
図2(a)において、エピポーラ線2104、2105、2106、および2107は、撮像部101と投影部102との位置関係によって決定されるエピポーラ平面と、投影部102の投影素子とが交わる線である。エピポーラ線2104、2105、2106、および2107は、実際にはパターン2109を構成する線としては表示されないが、特徴パターンの説明の為に、点線で表示している。またグループ2108は、エピポーラ線2104、2105、2106、および2107と、計測用パターン2101および計測用パターン2102と、により囲まれる3つの領域をグループ化して点線で示した領域である。グループ2108と同形状のグループが、パターン2109中に複数配置されており、一つのグループに対して、符号列2110の中の対応する1つの符号が割り当てられている。
【0020】
次に図2(b)を参照して、グループ2108における符号に対する特徴の種類について説明する。パターン2201、パターン2205、およびパターン2207は、グループ2108における異なる種類の特徴を表している。パターン2201、パターン2205、およびパターン2207には、スリット2202と、スリット2203と、撮像部101と投影部102とによって決定されるエピポーラ線と、により囲まれる領域2209、領域2210、領域2211が定義されている。パターン2201では、領域2209に特徴パターン2204が、パターン2205では、領域2210に特徴パターン2206が、パターン2207では、領域2211に特徴パターン2208がそれぞれ配置されている。パターン2201、パターン2205、およびパターン2207では、領域2209、領域2210、および領域2211の各面積と、領域2209、領域2210、および領域2211上の各特徴パターンの面積の比の差異により3種類に識別できる。
【0021】
加えて、パターン2201、パターン2205、およびパターン2207において、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付ける事も可能である。
【0022】
さらに、投影パターン生成部103は、必ずしも三次元計測装置10の一部である必要はなく、本発明で説明する各種投影パターンを生成する投影パターン生成装置(情報処理装置)として独立して使用することが可能である。投影パターン生成部103を独立した投影パターン生成装置として用いる場合、生成される投影パターンは、必ずしもエピポーラ線で領域を区切られる必要はなく、計測用パターンと異なる方向の区画線で区切れられていればよい。
【0023】
次に、図3および図4(a)−(d)を参照して、特徴認識部106について説明する。図3において、記憶部105から取得した画像2301についてパターン抽出を行い、計測用パターンと特徴パターンとを抽出した画像が2302である。複数のエピポーラ線2303と、計測用パターン2308とによりパターンを分割して、複数の領域を定義する。さらに分割された複数の領域のうち所定の領域をグループ化し、グループ2304、グループ2305、グループ2306、グループ2307を定義する。すなわち、分割された複数の領域のうち計測用パターンの方向に隣接している複数の領域を1つのグループとしてグループ化する。グループ2304、グループ2305、グループ2306、グループ2307には、それぞれ特徴パターン2309、特徴パターン2310、特徴パターン2311、特徴パターン2312が配置されている。各グループにおいて、グループ内の各領域の面積とグループ内の各領域上の特徴パターンの面積の比に基づき、特徴を認識して、符号を割りつける。なお、領域分割処理と、グループ化処理とは、特徴認識部106が行う処理であってもよいが、別の処理部を設けて当該別の処理部により実行されてもよい。その場合特徴認識部106は、各グループにおいて、グループ内の各領域の面積とグループ内の各領域上の特徴パターンの面積の比に基づき、特徴を認識して、符号を割りつける処理のみを実行することになる。
【0024】
ここで、図4(a)−(d)を参照して、特徴の認識方法について詳細に説明する。まず図4(a)において、パターン2401は、計測用パターン2402、計測用パターン2403と、特徴パターン2406、特徴パターン2407とにより構成されている。また、計測用パターン2402、計測用パターン2403と、エピポーラ線とにより区切られた領域2408、領域2409、領域2410、領域2411、領域2412、領域2413を定義することができる。加えて、領域2408、領域2409、領域2410をグループ化してグループ2404を定義する。また、領域2411、領域2412、領域2413をグループ化してグループ2405を定義する。
【0025】
まず、グループ2404の特徴についての認識方法を説明する。グループ2404を構成する、領域2408、領域2409、領域2410の面積を求める。次に領域2408、領域2409、領域2410内の特徴パターン2406の面積を求める。領域2408、領域2409、領域2410の面積と、領域2408、領域2409、領域2410内の特徴パターン2406の面積との比を求め、他の領域と比べて特徴パターン2406の面積の占める領域が大きい領域に特徴パターンが存在すると認識できる。同様にグループ2405では、領域2411に特徴パターンが存在すると認識される。
【0026】
ここで、特徴パターンと領域との面積の比を用いたパターンの認識方法について具体的な面積値を用いて説明する。パターン2401のグループ2404において、特徴パターン2406の面積が2、領域2408、領域2409、領域2410の面積が、全て4だとする。そして、各領域2408、領域2409、領域2410に領域上の特徴パターンの面積を各領域の面積で除算する。その結果、特徴パターンと領域との面積の比は、領域2408と領域2409が0(0/4)、領域2410が1/2(2/4)になる。各領域の面積の比を比べると領域2410が最も面積の比が大きい事が分かる。よって、領域2410上に特徴パターン2406が存在すると推定できる。ここで、領域間で面積の比の差異を大きくすることで特徴パターンの認識率が向上する。そのため、投影パターン生成部103により生成される特徴パターンの形状がエピポーラ線に対して平行または略平行な方向に延びていると領域内での面積を大きく配置することが可能であり、認識率を向上させることができる。
【0027】
次に、図4(b)を参照して、撮像部101の光学系によるボケの影響や、投影部102の光学系によるボケの影響によって、特徴パターン同士が重なり合う場合について説明する。パターン2414は、計測用パターン2415、計測用パターン2416と、特徴パターン2419、特徴パターン2420とにより構成されている。特徴パターン2419と特徴パターン2420とは、ボケの影響により、パターン同士が重畳している。また、計測用パターン2415、計測用パターン2416とエピポーラ線とにより区切られた領域2421、領域2422、領域2423、領域2424、領域2425、領域2426を定義することができる。加えて、領域2421、領域2422、領域2423をグループ化してグループ2417を定義する。また、領域2424、領域2425、領域2426をグループ化してグループ2418を定義する。
【0028】
まず、グループ2417の特徴について認識方法を説明する。最初に、グループ2417を構成する、領域2421、領域2422、領域2423の各面積を求める。次に領域2421、領域2422、領域2423内の特徴パターン2419の面積を求める。領域2421、領域2422、領域2423の面積と、領域2421、領域2422、領域2423内の特徴パターン2419の面積との比を求め、他の領域と比べて特徴パターン2419の面積の占める領域が大きい領域に特徴パターンが存在すると認識する。つまり、グループ2417では、領域2423に特徴パターンが存在すると認識される。ここで、ボケにより、特徴パターン2419が領域2422の小領域に特徴パターンが存在したとしても、領域2422では、他の領域と比べて特徴パターン2419の面積の占める領域が少ない為、正確に特徴を認識できる。同様にグループ2418では、領域2424に特徴パターンが存在すると認識される。このように本実施形態に係る三次元計測装置は、撮像部101の光学系によるボケの影響や、投影部102の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性が向上する。
【0029】
次に、図4(c)−(d)を参照して、領域の面積と特徴パターンの面積との比を用いることによる特徴認識について説明する。領域の面積と特徴パターンの面積との比を用いることによって、図4(c)に示すようなパターン2427、および、図4(d)に示すようなパターン2428の場合でも特徴を認識できる。パターン2427のように被写体108の形状に起因して特徴パターン2406の面積が減少した場合においても、撮像部101と投影部102との幾何的関係から、領域2410の面積も減少する。そのため、面積の比はパターン2401のグループ2404の領域2410の面積と特徴パターン2406の面積の比と同様の値となり、パターン2427においても特徴パターンが配置された領域を認識可能である。もちろん被写体108の形状がある程度平面に近ければ、領域の面積と特徴パターンの面積との比ではなく、特徴パターンの面積自体を比較することによって特徴パターンが存在する領域を認識してもよい。また、パターン2428において、撮影時のノイズにより、ノイズ2429が加えられたとする。その場合でも各領域の面積と特徴パターンの面積との面積の比を比べると領域2410が最も面積の比が大きいことから特徴パターンが配置された領域を認識可能である。
【0030】
再び図3に戻ると、特徴認識部106は、グループ2304、グループ2305、グループ2306、グループ2307のグループ毎に認識された特徴の認識結果として、符号列2313を生成する。図3の例では、グループ2304については2、グループ2305については1、グループ2306については2、グループ2307については3である。特徴認識部106は、生成された符号列2313を、三次元形状算出部107へ出力する。
【0031】
図5を参照して、三次元形状算出部107について説明する。三次元形状算出部107は、特徴認識部106から符号列2313を取得する。次に、図2(a)で示したパターン2109を構成する元の符号列2110と、符号列2313との対応を探索し、図5の点線で囲まれる対応位置2501を導く。符号列同士の対応から撮像部101により撮像される計測用パターンの位置と、投影部102により投影される計測用パターンの位置とが対応付けられる。そして、上述したように、対応付けられた計測用パターンの位置に基づいて三角測量の原理で被写体108の三次元形状を算出する。ここで、三角測量の基本的な原理には、特許文献2に開示されている。
【0032】
次に、図6のフローチャートを参照して、本実施形態に係る三次元計測装置の処理の手順を説明する。
【0033】
S601において、投影部102は、制御部104により投影パターン生成部103へ送信されたパターンを出力するための信号に基づいて投影パターン生成部103が生成するパターンを、被写体108へ投影する。S602において、撮像部101は、制御部104により撮像部101へ、投影が開始されるタイミングで送信された撮像信号に基づいて、被写体108を撮像する。また、撮像部101は、撮像画像を記憶部105に記憶する。
【0034】
S603において、特徴認識部106は、記憶部105から取得した撮像画像から、計測用パターンと特徴パターンとを抽出する。S604において、特徴認識部106は、S603で抽出された計測用パターンと特徴パターンとから符号列を抽出し、当該符号列を三次元形状算出部107へ出力する。
【0035】
S605において、三次元形状算出部107は、抽出された符号列と対応する符号列を探索する。S606において、三次元形状算出部107は、撮像部101により撮像された計測用パターンの位置と、投影部102により投影される計測用パターンの位置とを対応付ける。
【0036】
S607において、三次元形状算出部107は、対応付けられた計測用パターンの位置と、撮像部101および投影部102の位置関係と、に基づいて三角測量の原理で被写体108の三次元形状を算出する。以上で図6のフローチャートの各処理が終了する。
【0037】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0038】
(第2実施形態)
本実施形態に係る三次元計測装置は、第1実施形態で説明した三次元計測装置10の構成と同様であるため説明を省略する。図7(a)−(b)、図8(a)−(b)、および図9(a)−(b)を参照して、本実施形態に係る投影パターン生成部103により生成されるパターンについて、図2(a)のパターン2109で説明したグループ2108の定義とは異なるグループの定義の仕方を説明する。
【0039】
まず図7(a)のパターン4101に対して、グループ4102のように、計測用パターンに対して垂直方向にグループを定義している。すなわち、複数の領域のうちエピポーラ線の方向に隣接している複数の領域を1つのグループとしてグループ化する。これにより、グループ4102において、図7(b)に示されるパターン4201、パターン4202、パターン4203のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付けることが可能である。ここではパターン4201に対して1、パターン4202に対して2、パターン4203に対して3が対応づけられる。
【0040】
次に図8(a)のパターン4301に対して、グループ4302のように、計測用パターンに対して平行方向かつ垂直方向に渡る所定の領域をグループとして定義している。すなわち、複数の領域のうち計測用パターンの方向およびエピポーラ線の方向に隣接している複数の領域を矩形領域としてグループ化する。これにより、グループ4302において、図8(b)に示されるパターン4401、パターン4402、パターン4403、パターン4404のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3、4のような数字を対応付けることが可能である。ここではパターン4401に対して1、パターン4402に対して2、パターン4403に対して3、パターン4404に対して4が対応づけられる。
【0041】
次に図9(a)のパターン4501に対して、グループ4502のように、計測用パターンに対して斜め方向に存在する所定の領域をグループとして定義している。すなわち、複数の領域のうち計測用パターンの方向またはエピポーラ線の方向の何れの方向にも隣接していない斜め方向の複数の領域をグループ化する。なお、斜め方向であれば、45度方向または135度方向に限定されない。グループは、座標系を定義した場合、45度方向ならx方向に1ブロックかつy方向に1ブロックずれた方向(1、1方向)にある複数の領域であるが、例えばx方向に2ブロックかつy方向に1ブロックずれた方向(2、1方向)にある複数の領域をグループ化してもよい。これにより、グループ4502において、図9(b)に示されるパターン4601、パターン4602、パターン4603のような異なる特徴を認識できる。それぞれ、特徴パターンが配置された領域に応じて1、2、3のような数字を対応付けることが可能である。ここではパターン4601に対して1、パターン4602に対して2、パターン4603に対して3が対応づけられる。
【0042】
また、図2(b)における、隣接する領域2209、2210、2211は、必ずしも隣接している必要はなく、領域2209と2210の間、領域2210、2211の間にグループ化されていない領域を間に挿入しても良い。グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、被写体108の連続している面の面積に基づいて決定しても良い。ここで、図3の2301のように物体の形状により、投影されるパターンが、歪むため、グループ化される領域同士の間隔は連続している面の面積が投影されるパターンと比較して相対的に小さい場合は、グループ化される領域同士の間隔を小さくすることで、同一グループとして認識可能である可能性が高くなる。
【0043】
加えて、グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、被写体108の形状に基づいて決定しても良い。形状の起伏が大きい場合、グループ化される領域同士の間隔を小さくすることで、同一グループとして認識可能である可能性が高くなる。
【0044】
また、グループ化されていない領域を間に挿入した場合、グループ化される領域同士の間隔は、撮像手段の解像度に基づいて決定しても良い。撮像手段の解像度がパターンの特徴パターンの配置される間隔と比べて低い場合、グループ化される領域同士の間隔を広げる事で同一グループとして認識可能である可能性が高くなる。
【0045】
このように近傍のいくつかの領域をグループとして定義することによって、被写体108が連続した表面部分をあまり有しないような形状であっても、効率的に符号を抽出できる。本実施形態で説明したパターンを用いて、第1実施形態で説明したように被写体108の三次元形状を算出できる。
【0046】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0047】
(第3実施形態)
本実施形態に係る三次元計測装置は、第1実施形態で説明した三次元計測装置10の構成と同様であるため説明を省略する。図10乃至図14を参照して、本実施形態に係る投影パターン生成部103により生成されるパターンについて、図2(a)のパターン2109で説明した特徴パターン2103とは異なる特徴パターンを説明する。
【0048】
図10に示すパターン5101のように、投影パターン生成部103により生成されるパターンは、特徴パターン5102と特徴パターン5103とで特徴パターンの面積に差異のある特徴パターンを用いてもよい。また、特徴パターンの差異は、グループ化された複数の領域のそれぞれに配置された特徴パターンの、エピポーラ線と平行方向の長さの差異であってもよい。図10の例では、特徴パターン5102と特徴パターン5103とでエピポーラ線と平行方向の長さに差異がある。すなわち特徴パターンの面積の差異またはエピポーラ線と平行方向の長さの差異により特徴を認識することができる。
【0049】
また、図11に示すパターン5201のように、投影パターン生成部103により生成されるパターンは、特徴パターン5202と特徴パターン5203とで特徴の光の波長または光の輝度に差異のある特徴パターンを用いてもよい。すなわち、光の波長の差異または光の輝度の差異に基づいて特徴を認識することができる。
【0050】
また、図12に示すパターン5301のように、投影パターン生成部103により生成されるパターンは、特徴パターン5302が近傍領域5303に重畳していてもよい。特徴認識部106は、定義されたグループ5304内の領域で特徴の差異が存在すれば、特徴パターン同士が重畳していても特徴を認識できる。
【0051】
また、図13に示すパターン5401のように、投影パターン生成部103により生成されるパターンは、特徴パターン5402と特徴パターン5403とで、エピポーラ線と平行方向に差異のある特徴を用いてもよい。図13の場合、特徴パターン5402は面積が特徴パターン5403よりも大きい。
【0052】
また、図14に示すパターン5501のように、投影パターン生成部103により生成されるパターンは、図2(a)のグループ2108の特徴パターン2103を、特徴パターン5503のように形状を円形に変えた特徴パターンである。特徴パターン5503は、グループ5502の中で特徴の面積に差異がある。そのため、特徴の形状が異なる場合でも特徴を認識可能であり、投影パターン生成部103を用いて生成されるパターンは、特徴パターン5503を用いてもよい。
【0053】
本実施形態で説明したパターンを用いて、第1実施形態で説明したように被写体108の三次元形状を算出できる。
【0054】
本実施形態によれば、撮像部の光学系によるボケの影響や、投影部の光学系によるボケの影響によって特徴パターン同士が重なり合う場合においても、特徴を認識できる可能性を向上することができる。
【0055】
(その他の実施形態)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【特許請求の範囲】
【請求項1】
計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影手段と、
前記パターンが投影された前記被写体を撮像する撮像手段と、
前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像手段により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化手段と、
前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識手段と、
前記特徴認識手段により認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出手段と、
を備えることを特徴とする三次元計測装置。
【請求項2】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向に隣接している複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項3】
前記グループ化手段は、前記複数の領域のうち前記エピポーラ線の方向に隣接している複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項4】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向および前記エピポーラ線の方向に隣接している複数の領域を矩形領域としてグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項5】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向または前記エピポーラ線の方向の何れの方向にも隣接していない複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項6】
前記グループ化手段は、前記被写体の連続している面の面積に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項7】
前記グループ化手段は、前記被写体の形状に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項8】
前記グループ化手段は、前記撮像手段の解像度に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項9】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれの面積と、前記グループ化された複数の領域のそれぞれにおける前記特徴パターンの面積との比の差異あることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項10】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれにおける前記特徴パターンの面積の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項11】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、前記エピポーラ線と平行方向の長さの差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項12】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、光の輝度の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項13】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、光の波長の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項14】
前記投影手段は、前記計測用パターンと前記特徴パターンとを同時にパターンとして前記被写体へ投影することを特徴とする請求項1乃至13の何れか1項に記載の三次元計測装置。
【請求項15】
前記投影手段は、前記計測用パターンと前記特徴パターンとを順次切り替えてパターンとして前記被写体へ投影することを特徴とする請求項1乃至13の何れか1項に記載の三次元計測装置。
【請求項16】
前記計測用パターンは、スリットパターンであることを特徴とする請求項1乃至15の何れか1項に記載の三次元計測装置。
【請求項17】
計測用パターンと、前記計測用パターンの方向とは異なる方向の複数の区画線と、に基づいて構成される複数の領域をグループ化して、当該グループ化された複数の領域の少なくとも1つに特徴パターンを配置することにより、前記計測用パターンと前記特徴パターンとを有する投影パターンを生成する生成手段を備えることを特徴とする情報処理装置。
【請求項18】
前記区画線はエピポーラ線であることを特徴とする請求項17に記載の情報処理装置。
【請求項19】
投影手段と、撮像手段と、グループ化手段と、特徴認識手段と、三次元形状算出手段とを備える三次元計測装置の制御方法であって、
前記投影手段が、計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影工程と、
前記撮像手段が、前記パターンが投影された前記被写体を撮像する撮像工程と、
前記グループ化手段が、前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像工程で撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化工程と、
前記特徴認識手段が、前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識工程と、
前記三次元形状算出手段が、前記特徴認識工程で認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出工程と、
を有することを特徴とする三次元計測装置の制御方法。
【請求項20】
請求項19に記載の三次元計測装置の制御方法の各工程をコンピュータに実行させるためのプログラム。
【請求項21】
生成手段を備える情報処理装置の制御方法であって、
前記生成手段が、計測用パターンと、前記計測用パターンの方向とは異なる方向の複数の区画線と、に基づいて構成される複数の領域をグループ化して、当該グループ化された複数の領域の少なくとも1つに特徴パターンを配置することにより、前記計測用パターンと前記特徴パターンとを有する投影パターンを生成する生成工程を有することを特徴とする情報処理装置の制御方法。
【請求項22】
請求項21に記載の情報処理装置の制御方法の工程をコンピュータに実行させるためのプログラム。
【請求項1】
計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影手段と、
前記パターンが投影された前記被写体を撮像する撮像手段と、
前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像手段により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化手段と、
前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識手段と、
前記特徴認識手段により認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出手段と、
を備えることを特徴とする三次元計測装置。
【請求項2】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向に隣接している複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項3】
前記グループ化手段は、前記複数の領域のうち前記エピポーラ線の方向に隣接している複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項4】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向および前記エピポーラ線の方向に隣接している複数の領域を矩形領域としてグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項5】
前記グループ化手段は、前記複数の領域のうち前記計測用パターンの方向または前記エピポーラ線の方向の何れの方向にも隣接していない複数の領域をグループ化することを特徴とする請求項1に記載の三次元計測装置。
【請求項6】
前記グループ化手段は、前記被写体の連続している面の面積に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項7】
前記グループ化手段は、前記被写体の形状に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項8】
前記グループ化手段は、前記撮像手段の解像度に基づいてグループ化する領域の間隔を決定することを特徴とする請求項1に記載の三次元計測装置。
【請求項9】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれの面積と、前記グループ化された複数の領域のそれぞれにおける前記特徴パターンの面積との比の差異あることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項10】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれにおける前記特徴パターンの面積の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項11】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、前記エピポーラ線と平行方向の長さの差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項12】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、光の輝度の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項13】
前記特徴パターンの差異は、前記グループ化された複数の領域のそれぞれに配置された前記特徴パターンの、光の波長の差異であることを特徴とする請求項1乃至8の何れか1項に記載の三次元計測装置。
【請求項14】
前記投影手段は、前記計測用パターンと前記特徴パターンとを同時にパターンとして前記被写体へ投影することを特徴とする請求項1乃至13の何れか1項に記載の三次元計測装置。
【請求項15】
前記投影手段は、前記計測用パターンと前記特徴パターンとを順次切り替えてパターンとして前記被写体へ投影することを特徴とする請求項1乃至13の何れか1項に記載の三次元計測装置。
【請求項16】
前記計測用パターンは、スリットパターンであることを特徴とする請求項1乃至15の何れか1項に記載の三次元計測装置。
【請求項17】
計測用パターンと、前記計測用パターンの方向とは異なる方向の複数の区画線と、に基づいて構成される複数の領域をグループ化して、当該グループ化された複数の領域の少なくとも1つに特徴パターンを配置することにより、前記計測用パターンと前記特徴パターンとを有する投影パターンを生成する生成手段を備えることを特徴とする情報処理装置。
【請求項18】
前記区画線はエピポーラ線であることを特徴とする請求項17に記載の情報処理装置。
【請求項19】
投影手段と、撮像手段と、グループ化手段と、特徴認識手段と、三次元形状算出手段とを備える三次元計測装置の制御方法であって、
前記投影手段が、計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影工程と、
前記撮像手段が、前記パターンが投影された前記被写体を撮像する撮像工程と、
前記グループ化手段が、前記パターンにおける前記計測用パターンと、前記投影手段と前記撮像手段との位置関係に基づいて決定される複数のエピポーラ線とによって、前記撮像工程で撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化工程と、
前記特徴認識手段が、前記所定の領域のそれぞれにおける前記特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識工程と、
前記三次元形状算出手段が、前記特徴認識工程で認識された前記特徴パターンに基づいて前記被写体の三次元形状を算出する三次元形状算出工程と、
を有することを特徴とする三次元計測装置の制御方法。
【請求項20】
請求項19に記載の三次元計測装置の制御方法の各工程をコンピュータに実行させるためのプログラム。
【請求項21】
生成手段を備える情報処理装置の制御方法であって、
前記生成手段が、計測用パターンと、前記計測用パターンの方向とは異なる方向の複数の区画線と、に基づいて構成される複数の領域をグループ化して、当該グループ化された複数の領域の少なくとも1つに特徴パターンを配置することにより、前記計測用パターンと前記特徴パターンとを有する投影パターンを生成する生成工程を有することを特徴とする情報処理装置の制御方法。
【請求項22】
請求項21に記載の情報処理装置の制御方法の工程をコンピュータに実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−88260(P2013−88260A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228272(P2011−228272)
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]