
三次元速度の計測システム
【課題】容易に気泡等、測定対象の三次元流速を検出することができる三次元速度の計測システムを提供する。
【解決手段】流路1の途中に配設した上流側センサ部2Aと、上流側センサ部2Aに対応させて流体1の下流側に配設した下流側センサ部2Bとを有するセンサ部2と、上流側センサ部2Aの特定の計測点に関する計測信号と下流側センサ部2Bの所定の領域に含まれる計測点で計測された計測信号との相互相関をとることにより相互相関係数が最大となる下流側の計測点を特定するとともに、前記相互相関計数を上流側の計測点のそれぞれに関してとることにより各相互相関係数が最大となる下流側の計測点をそれぞれ特定し、各上流側の計測点を通過して各下流側の計測点に至った気泡Bの三次元的な流速をそれぞれ演算する演算処理装置3とを有する。
【解決手段】流路1の途中に配設した上流側センサ部2Aと、上流側センサ部2Aに対応させて流体1の下流側に配設した下流側センサ部2Bとを有するセンサ部2と、上流側センサ部2Aの特定の計測点に関する計測信号と下流側センサ部2Bの所定の領域に含まれる計測点で計測された計測信号との相互相関をとることにより相互相関係数が最大となる下流側の計測点を特定するとともに、前記相互相関計数を上流側の計測点のそれぞれに関してとることにより各相互相関係数が最大となる下流側の計測点をそれぞれ特定し、各上流側の計測点を通過して各下流側の計測点に至った気泡Bの三次元的な流速をそれぞれ演算する演算処理装置3とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は三次元速度の計測システムに関し、特に原子炉や火力発電所等のプラントにおける気液二相流状態における流れ場の気泡の三次元相速度を計測する場合に適用して有用なものである。
【背景技術】
【0002】
沸騰水型原子炉の安全評価に係る二相流解析は、冷却材の流れを正確に評価するため、一次元から三次元モデルに移行しつつある。その中で、沸騰二相流を含む三次元熱流動解析コードは、精度の良い三次元二相流動の実験データによる検証が必要である。この種のデータを得るための計測システムとしてセンサ部をワイヤメッシュセンサで構成したものが知られている(非特許文献1参照)。
【0003】
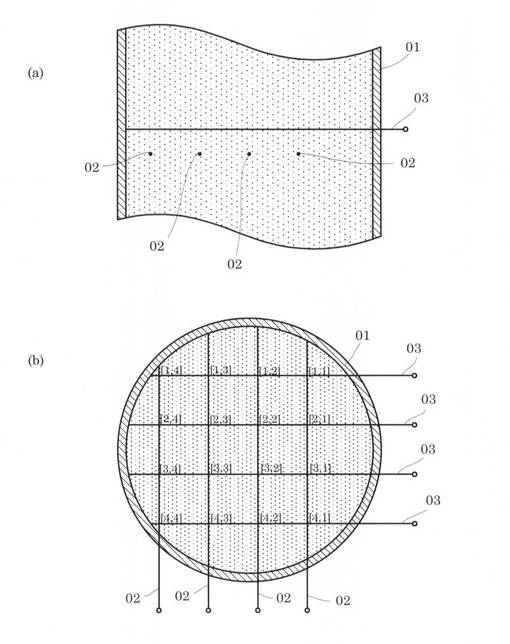
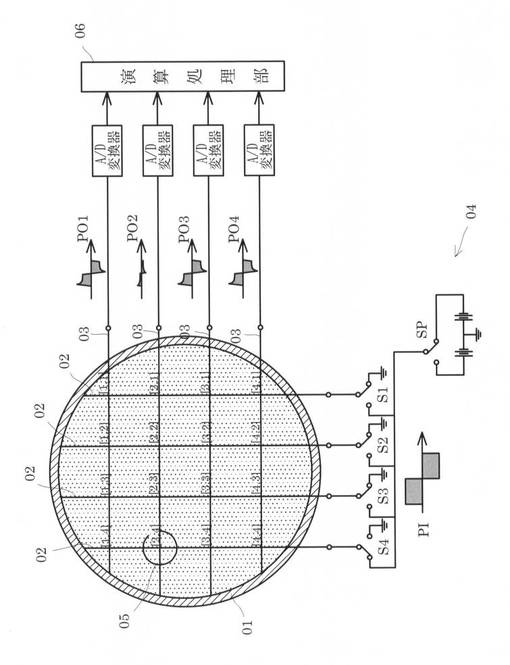
ワイヤメッシュセンサは、図11(a)に示すように、流体が流れる管路01の軸方向において所定の距離を隔てて交叉させるとともに、図11(b)に示すように管路01の断面内で正方格子状に配設された第1のワイヤ電極02および第2のワイヤ電極03を有しており、第1のワイヤ電極02を励起電極および第2のワイヤ電極03を計測電極とするインピーダンスセンサである。ワイヤ同士は近接しているが、接触はしていない。以下、第1のワイヤ電極02および第2のワイヤ電極03の交点を計測点という。したがって、計測点はワイヤメッシュセンサの面内に正方格子状に分散されて多数形成されている。
【0004】
かかるワイヤメッシュセンサは、図12に示すように、第1のワイヤ電極02で形成する入力線にはスイッチS1,S2,S3,S4により一列目から順に励起パルス(入力信号)PIが印加される。ここで、励起パルスPIは電源04から切替スイッチSPを介して供給される。
【0005】
上述の如き励起パルスPIの印加に伴い、計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])におけるインピーダンスは、各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])を短絡する流体の状態に応じて変化する。この結果、第2のワイヤ電極03で形成する出力線には各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])のインピーダンスを反映した計測信号(出力信号)PO1、PO2、PO3、PO4が各行毎に出力される。いま、スイッチS4を閉にすることによってスイッチS4に接続された第1のワイヤ電極02に励起パルスPIが印加された場合を考える。この場合において、計測点[2,4]に気泡05が存在する一方、他の計測点[1,4],[3,4],[4,4]近傍が液体で満たされていると、計測点[2,4]におけるインピーダンスが、他の計測点[1,4],[3,4],[4,4]におけるインピーダンスよりも小さくなるので、この計測点[2,4]に対応する第2のワイヤ電極03を介して得られる計測信号PO2は他の計測信号PO1,PO3,PO4よりも低いインピーダンスとして検出される。すなわち、計測信号PO1、PO3、PO4の平均レベルは計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])における気液二相流における液体(例えば水)と気体(気泡05)の存在量を反映したものとなる。この結果、計測信号PO1〜PO4を演算処理部06で処理することにより各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])における、例えば気液二相流における気液の割合等、所望の物質の存在量を演算により計測することができる。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】H.Pietruske.H.-M.Prasser/Flow Measurement and Instrumentation 18(2007) 87-94
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の如きワイヤメッシュセンサを流体の流れ方向に関して上下二箇所に配設すれば二組のワイヤメッシュセンサの各出力信号の時間差により気泡の速度も計測可能である。すなわち、上下流のワイヤメッシュセンサにおいてそれぞれ対応する一点間では相互相関分析による主流方向一次元での気泡速度計測を行うことができる。ところが、この場合の気泡速度の計測は流れ方向一次元の評価に止まる。
【0008】
本発明は、上記問題点に鑑み、気泡等、測定対象の三次元流速を容易かつ適確に検出することができる三次元速度の計測システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成する本発明の第1の態様は、
流路を流れる測定対象のインピーダンスを反映した計測信号である出力信号を送出するセンサ部と、
前記出力信号を処理して前記測定対象の速度を計測する演算処理手段とを具備するとともに、
前記センサ部は、
前記流路内において前記測定対象の流れの中の面内の複数位置に配設された上流側計測点における前記測定対象のインピーダンスを表わす上流側出力信号を送出する上流側センサ部と、
流体の流れ方向の下流側における前記面と同様の他の面内で前記上流側計測点に対応させて複数配設された下流側計測点における前記測定対象のインピーダンスを表わす下流側出力信号を送出する下流側センサ部とを有する一方、
前記演算処理手段は、特定の前記上流側計測点に関する前記上流側計測信号と前記下流側センサの所定の領域に含まれる前記下流側計測点で計測された前記下流側出力信号との相互相関をとることにより相互相関係数が最大となる前記下流側計測点を特定するとともに、前記相互相関を前記上流側計測点のそれぞれに関してとることにより各相互相関係数が最大となる前記下流側計測点をそれぞれ特定し、前記各上流側計測点を通過して前記各下流側計測点に至った前記測定対象の三次元的な流速をそれぞれ演算するように構成したことを特徴とする三次元速度の計測システムにある。
【0010】
本態様によれば、測定対象が移動した三次元的な軌跡を特定でき、その軌跡における移動距離と移動に要した時間とに基づき、上流側センサ部から下流側センサ部に移動した測定対象の三次元的な移動速度に関する情報を容易、かつ適確に得ることができる。
【0011】
本発明の第の2の態様は、
第1の態様に記載する三次元速度の計測システムにおいて、
前記上流側センサ部および下流側センサ部はワイヤメッシュセンサで構成したことを特徴とする三次元速度の計測システムにある。
【0012】
本態様によれば、上流側および下流側センサ部を良好に構成することができる。
【0013】
本発明の第3の態様は、
第1または第2の態様に記載する三次元速度の計測システムにおいて、
前記演算処理手段は、
前記上流側出力信号における前記特定の上流側計測点に対応する成分と前記下流側出力信号における前記相互相関係数が最大となる前記下流側計測点に対応する成分との時間差と、
前記上流側センサ部と前記下流側センサ部間の前記軸方向に沿う距離と、前記特定の上流側計測点に対応する下流側計測点の座標から前記相互相関係数が最大となる前記下流側計測点の座標までの前記面内での距離とに基づき前記特定の上流側計測点と前記相互相関係数が最大となる前記下流側計測点との間の距離を演算し、
前記時間差と前記距離とに基づき前記測定対象の三次元的な流速を演算するものであることを特徴とする三次元速度の計測システムにある。
【0014】
本態様によれば、上流側センサ部と下流側センサ部との流れ方向に沿う距離と、特定の上流側計測点に対応する下流側計測点から相互相関係数が最大となる下流側計測点までの下流側センサ部の面内における距離とに基づき特定の上流側計測点から前記相互相関係数が最大となる下流側計測点までの距離を求め、この距離を測定対象の三次元的な移動時間である時間差で除することにより容易かつ適確に所望の三次元的な測定対象の移動速度を求めることができる。
【0015】
本発明の第4の態様は、
第1〜第3の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記上流側出力信号および下流側出力信号を所定の周波数帯域毎に弁別して複数の周波数帯域毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された周波数帯域毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システムにある。
【0016】
本態様によれば、センサ部の出力信号を所定の周波数帯域毎に抽出することにより測定対象の径に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。この結果、気泡の径毎に異なる特徴的な挙動を容易かつ適確に把握することができる。ちなみに、高ボイド率での二相流動では数10cmの大きな径を持つ大気泡や数mm程度の小気泡が混在し、複雑な多次元性を持つ。これは、気泡の大きさによって浮力や抗力等の影響の度合いが違うことに起因して大気泡および小気泡が異なる挙動を示すためであるが、本態様によれば、例えば大気泡や小気泡が混在する測定対象において、複雑な多次元性をもつ流体における測定対象の挙動をその径毎に求まる三次元速度情報を利用することができるので、測定対象物の高精度な3次元速度の計測が可能になる。
【0017】
本発明の第5の態様は、
第1〜第3の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記面内の所定範囲における前記上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部と下流側センサ部との距離に基づき前記測定対象を体積毎に弁別して複数の体積毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された体積毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システムにある。
【0018】
本態様によれば、測定対象の体積毎にセンサ部の出力信号を抽出することにより測定対象の体積に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。この結果、気泡の体積毎に異なる特徴的な挙動を容易かつ適確に把握することができる。
【0019】
本発明の第6の態様は、
第4の態様に記載する三次元速度の計測システムにおいて、
前記前処理部は前記上流側出力信号および下流側出力信号のウェーブレット解析を行うものであることを特徴とする三次元速度の計測システムにある。
【0020】
本態様によればセンサ部の出力信号のウェーブレット解析により測定対象の径毎の三次元移動速度の情報を容易かつ適確に得ることができる。
【0021】
本発明の第7の態様は、
上記第4〜第6の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記前処理部は、液相との相対速度の差が2〜5cm/secの測定対象に基づく前記上流側出力信号および下流側出力信号を前記演算処理部に送出するように構成したことを特徴とする三次元速度の計測システムにある。
【0022】
本態様によれば、演算処理部で求まる測定対象の三次元速度を液相の三次元速度とみなすことができ、実質的に液相の三次元速度を検出することができる。ちなみに、従来技術において液相の速度を計測するには、流体中にトレーサを投入し、このトレーサの移動をレーザー光と撮像手段等とを用いて、例えばPIV(Particle Image Velocimetry)等により追跡する必要があったが、本態様によれば所定の小気泡等の測定対象の速度を検出することで実質的な液相の三次元流速を容易に計測することができる。ちなみに、この場合、実質的に液相と見なすことができる測定対象は、センサ部におけるサンプリング周波数が1kHzである場合、このサンプリング周波数と同程度の周波数帯域で弁別される気泡等であるが、気泡であれば径が1mm程度のものである。
【0023】
本発明の第8の態様は、
第1〜第7の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記各測定対象の三次元流速の前記面内方向成分に基づき前記面内における前記各測定対象の移動方向を検出して前記測定対象の所定時間内における挙動を表示部に可視化して表示するものであることを特徴とする三次元速度の計測システムにある。
【0024】
本態様によれば、流れ方向に直交する面内における気泡等、測定対象の挙動、すなわち旋回の様子等を可視化して視認することができる。
【発明の効果】
【0025】
本発明によれば、測定対象が移動した三次元的な軌跡を特定でき、その軌跡における移動距離と移動に要した時間とに基づき、上流側センサ部から下流側センサ部に移動した測定対象の三次元的な移動速度に関する情報を容易、かつ適確に得ることができる。この結果、上下流のセンサ部においてそれぞれ対応する一点間での相互相関分析による主流方向一次元での速度計測を行なう従来技術に較べ、時間分解能を飛躍的に向上させることができる。従来では短時間で変化する二相流動の多次元性を正確に評価できないのに対し、本発明では、多点相互相関分析により少ないフレーム数での相互相関分析を可能とし、高時間分解能での多次元相速度ベクトルを求めることができるからである。
【0026】
さらに、ウェーブレット解析等の前処理を行なうことにより、径や体積が異なる測定対象物毎の特徴的な挙動の解析を適確に行うことができる。特に、測定対象物の速度を液相の速度とみなしてトレーサを使用するPIV法等によらず簡易に実質的な液相の速度を検出することも可能になる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の形態に係る三次元速度の計測システムの全体を示すブロック線図である。
【図2】上記実施の形態における全体的な信号処理の概要を示すフロー図である。
【図3】上記実施の形態における計測原理を概念的に示す説明図である。
【図4】上記実施の形態における具体的な信号処理の手順を示すフローチャートである。
【図5】従来技術に係る計測における問題点を説明するための説明図である。
【図6】本発明の他の変形例である第1の実施例を示す説明図である。
【図7】本発明の他の変形例である第2の実施例を示す説明図である。
【図8】本発明の他の変形例である第3の実施例を示す説明図である。
【図9】本発明の他の変形例である第4の実施例を示す説明図である。
【図10】本発明の他の変形例である第5の実施例を示す説明図である。
【図11】ワイヤメッシュセンサを示す説明図である。
【図12】計測原理も含めたワイヤメッシュセンサを概念的に示す説明図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
【0029】
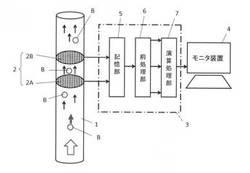
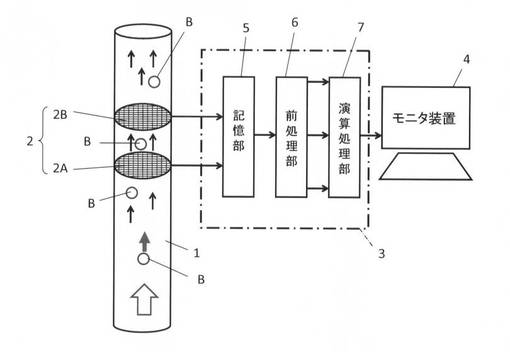
本発明の実施の形態に係る三次元速度の計測システムの全体を示すブロック線図である。同図に示すように、本形態に係る三次元速度の計測システムは、気泡Bを含む流体が流通する流路1の上流側と下流側の少なくとも二箇所に配設された上流側センサ部2A,2Bからなるセンサ部2と、センサ部2から送出された計測信号である出力信号に対して所定の演算処理を行なう演算処理装置3と、演算処理装置3で所定の演算処理を行なった出力信号が表す気液二相流に関する所定の情報を可視化するモニタ装置4とを有する。
【0030】
ここで、本形態におけるセンサ部2は、本形態の場合、図11に示すワイヤメッシュセンサ(以下、WMSともいう。)で構成してある。したがって、それぞれの面内には多数の上流側計測点および下流側計測点がマトリクス状に配設されている。また、測定対象は気液二相流における気泡である。
【0031】
演算処理装置3は、記憶部5、前処理部6および演算処理部7を有している。記憶部5は、センサ部2の出力信号であり、上流側センサ部2A、下流側センサ部2Bの上流側計測点および下流側計測点における流体のインピーダンスを反映した上流側出力信号および下流側出力信号を一旦記憶する。前処理部6は記憶部5に記憶された上流側出力信号および下流側出力信号を読み出して所定の前処理を行なう。本形態では、各計測点からの出力信号のウェーブレット変換を行なうことにより、上流側出力信号および下流側出力信号の全体的なウェーブレット解析を行なう。これにより、小気泡ほど周波数が高く、大気泡ほど周波数が低い信号として気泡の径毎に弁別されたスケール1〜スケールNのN種類の信号を得る。ここで、スケールとはサンプリング周期を表わしており、スケール1はサンプリング周波数が1kHzの場合で周期が1msecの信号であり、スケールNは周期がN(Nは自然数)msecの信号であることを意味している。
【0032】
演算処理部7は、まず上流側センサ部2Aの特定の上流側計測点に関する上流側計測信号と、下流側センサ部2Bの所定の領域に含まれる複数の下流側計測点における下流側出力信号との相互相関をとることにより相互相関係数が最大となる下流側計測点を特定する。そして、同様の相関処理を上流側計測点のそれぞれに関して行なうことにより各相互相関係数が最大となる下流側計測点をそれぞれ特定して、気泡Bの三次元的な流速をそれぞれ演算する。かかる演算の具体的な内容に関しては上流側出力信号と下流側出力信号に関する信号処理手法として後に詳述する。また、かかる信号処理は、ウェーブレット解析後の各スケール1〜Nのそれぞれの信号に対して行なう。すなわち、所定の小気泡から大気泡のそれぞれを表わす上流側出力信号および下流側出力信号の任意に選択した一部または全部に対して行う。
【0033】
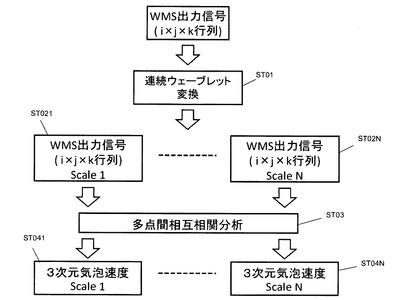
図2は本実施の形態における全体的な信号処理の概要を示すフロー図である。同図に示すように、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報に関し、各成分の連続ウェーブレット変換を行なう(ステップST01参照)。ここで、「連続」とは全ての周波数成分に対してウェーブレット変換を行なうことを意味する。本態様では、連続ウェーブレット変換を行なっているが、これは特定の離散的な周波数に関し必要に応じて行なっても勿論構わない。
【0034】
この結果、気泡の径毎に弁別されたWMS出力信号がi×j×kの行列として各気泡の径毎にN種類の情報として得られる(ステップST021〜ST02N参照)。これをスケール1〜Nで表す。
【0035】
次に、詳細は後述するが、気泡信号抽出のための多点間相互相関分析を行い(ステップST03参照)、続けて各スケール1〜N毎に三次元気泡速度を演算する(ステップST041〜ST04N)。
【0036】
なお、上記ステップST01およびST021〜ST02Nの処理は前処理部6で、ステップST03およびST041〜ST04Nの処理は演算処理部7でそれぞれ実行される。
【0037】
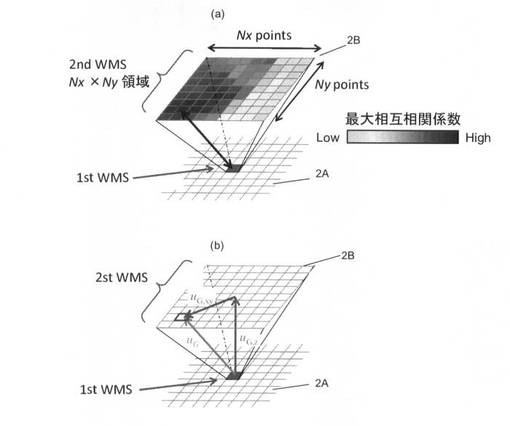
上述の多点間相互相関分析および三次元気泡速度の演算処理の原理を図3に基づき説明する。図3(a)に示すように、まず上流側センサ部2A(図中の「1stWMS」;以下同じ)の特定の上流側計測点(図中に黒塗り部で示す計測点)における上流側計測信号と、下流側センサ部2B(図中の「2ndWMS」;以下同じ)の所定の領域(図中の「Nx×Ny領域」;以下同じ)に含まれる複数の下流側計測点における下流側出力信号との相互相関をとることにより相互相関係数が最大となる下流側計測点を特定する。図3(a)では色の濃淡で、1stWMSにおける計測点の信号との相関係数の大きさの程度を表している。ここで、1stWMSの特定の計測点を通過した気泡は2ndWMSの最大相関係数を与える下流側計測点に至ったと考えられる。
【0038】
そこで、図3(b)に示すように、1stWMSの特定の計測点から、流れ方向に沿い(図では鉛直方向)2ndWMSの対応する下流側計測点に至る距離ベクトルをuG,zとし、距離ベクトルをuG,zを起点として2ndWMSの面内(図では水平面内)を通って最大相関係数を与える2ndWMSの下流側計測点に至り、この下流側計測点を終点とする距離ベクトルをuG,xyとした場合、気泡の移動距離を表す三次元距離ベクトルuGは、距離ベクトルuG,zと距離ベクトルをuG,xyとのベクトル和として与えられる。ここで、距離ベクトルuG,zは1stWMSと2ndWMSとの流れ方向に沿う間隔として、また距離ベクトルuG,xyは2ndWMSの面であるxy平面内の前記起点の座標と終点の座標との間の距離として与えられる。一方、気泡が1stWMSの特定の上流側計測点から2ndWMSの最大相関係数を与える下流側計測点に至る時間は両者の間の時間差を表す情報として別途与えられている。そこで、三次元距離ベクトルuGと時間差情報とに基づき三次元の気泡速度を演算することができる。
【0039】
1stWMSの各上流側計測点に関し2ndWMSの所定の領域に含まれる複数の下流側計測点における相互相関をとる上述の如き一連の処理を行なうことにより各上流側計測点を通過する気泡の三次元流速を求めることができる。ここで、2ndWMSにおける所定の領域は2ndWMSの全域を対象領域とする場合まで任意に拡張設定を行うことができる。例えば、一回目の相互相関で最大の相関係数を与える下流側計測点が領域の端部に存在し、端部を越えて相関係数が高くなる領域の存在の可能性が考えられる場合には、領域を広げて再度相互相関を取り直す等の処理を行なうことにより相互相関処理の適正化を図ることができる。
【0040】
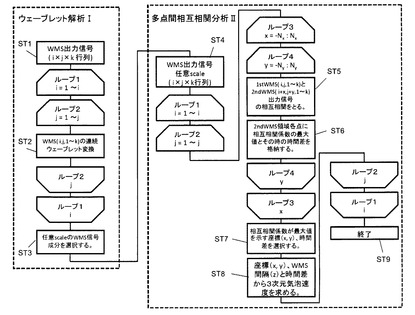
図4は、本形態の演算処理装置3における信号処理の具体的な手順を示すフローチャートである。同図に示すように、演算処理装置3における情報処理は、前処理部6で行なうウェーブレット解析Iと、これに続き演算処理部7で行なう多点間相互相関分析IIに分けられる。同図に示すように、ウェーブレット解析Iは、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報を記憶部5から読み込むことで開始される(ステップST1参照)。1〜kの各時間毎に特定の座標位置(x、y)の計測点でのウェーブレット変換を行なう。計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ1参照)とともに、計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ2参照)。
【0041】
この結果、任意のスケールに関して上流側出力信号および下流側出力信号であるWMS信号成分が選択される(ステップST3参照)。
【0042】
多点間相互相関分析IIは特定のスケール1〜N毎にステップST3で選択されたWMS信号成分を用いて行なう。そこで、特定のスケールに関し、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報を前処理部5から読み込む(ステップST4参照)。その後、所定のウェーブレット変換が完了した上流側センサ部2Aからの特定の上流側出力信号と、下流側センサ部2Bの面内でx方向、y方向にずらした計測点の下流側出力信号とに基づき両者の相互相関をとる。かかる処理を1〜kの各時間毎に行なう(ステップST5参照)。続いて下流側センサ部2Bの所定の領域内における各計測点における相互相関係数の最大値と、この最大値を与える時間差とを格納する(ステップST6参照)。下流側計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ3参照)とともに、計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ4参照)。
【0043】
その後、相関係数が最大値を示す下流側センサ部2Bの面内における座標(x、y)と、そのときの時間差とを選択し(ステップST7参照)、続いて前記座標(x、y)、予め与えられる上流側センサ部2Aと下流側センサ部2Bとの間隔(z)および前記時間差から三次元気泡速度を求める(ステップST8参照)。上流側計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ1参照)とともに、上流側計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ4参照)ことにより一連の処理を終了する(ステップST9参照)する。
【0044】
かかる一連の処理を行なえば上流側センサ部2Aから下流側センサ部2Bに移動した気泡の三次元的な移動速度に関する情報を容易、かつ適確に得ることができるが、上流側センサ部2Aの特定の計測点に対し下流側センサ部2Bにおいて対応する流れ方向に沿う一点間での相互相関分析による一次元の気泡速度計測を行なう従来技術に較べ、時間分解能を飛躍的に向上させることができる。
【0045】
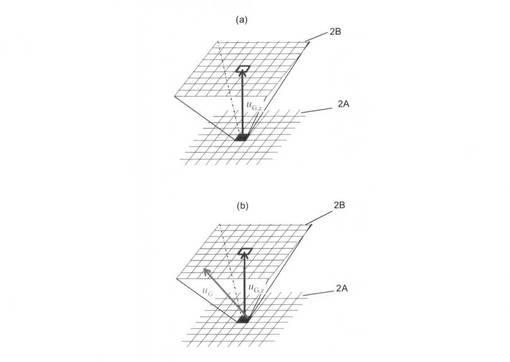
この点に関し図5に基づきさらに詳細に説明する。図5(a)に示すように、上流側センサ部2Aの特定の計測点(図(a)の黒塗り部)に対し下流側センサ部2Bにおいて対応する流れ方向に沿う一点である計測点(図(a)の白抜き部)間での相互相関分析による一次元のベクトルuG,zを用いて気泡速度計測を行なう場合には、図5(b)にベクトルuG,zとして示すように気泡の流れ方向が下流側センサ部2Bの面(水平面)内において大きくずれた場合、計測時間を短くすると下流側センサ部2Bの計測点から外れてしまうため相関を採ることができない。したがって、ある程度長い計測時間を設定してその間の平均化された信号に基づき一次元の相関を採らざるを得ないからである。本形態によれば、サンプリング周期を短くしても、下流側センサ部2Bの面内に広がる多数の計測点のいずれかで上流側センサ部の特定の計測点を通過した気泡の下流側センサ部2Bの通過を確実に検出することができ、当該計測における時間分解能の飛躍的な改善を図ることができる。
【0046】
本形態においては図1に示すものに限らず、流路の形状やセンサ部の構成を変更した種々の変形例が考えられる。これらを第1〜第5の実施例として説明しておく。
【0047】
<第1の実施例>
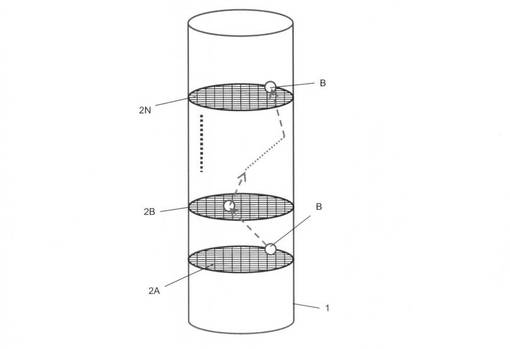
図6は第1の実施例を示す説明図である。同図に示すように、本実施例では上流側センサ部2Aに対し流路1の軸方向に分散させて多数の下流側センサ部2B,・・・,2Nを配設したものである。
【0048】
本実施例によれば、気泡Bの三次元流速に基づきその三次元的な挙動を計測することができる。
【0049】
<第2の実施例>
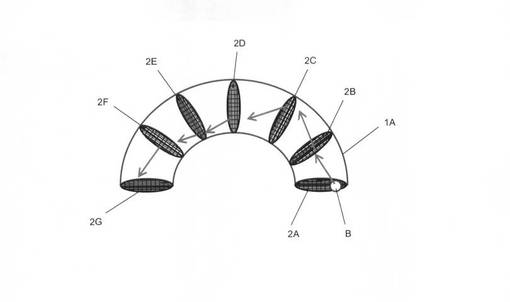
図7は第2の実施例を示す説明図である。同図に示すように、センサ部を配設する流路は曲管(エルボ管)1Aであっても良い。この場合でも上流側センサ部2A、下流側センサ部2B,2C,2D,2E,2F,2Gの各出力信号を上述の如く処理することで、各上流側センサ部2A、下流側センサ部2B〜2Gの各計測点における気泡Bの三次元流速を求めることができ、これにより気泡Bの移動方向を追跡することができる。ちなみに、流路1Aの軸方向に設定される一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0050】
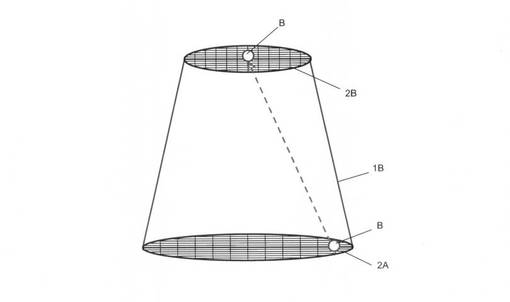
<第3の実施例>
図8は第3の実施例を示す説明図である。同図に示すように本例は、流路1Bがレデューサ部を有する場合である。流路1Bの板面積が変化してもそれに合わせて上流側センサ部2Aの面積に対し下流側センサ部2Bの面積を変更すれば問題なく所望の計測を行うことができる。具体的には、WMSのメッシュ間隔を変更すれば良い。
【0051】
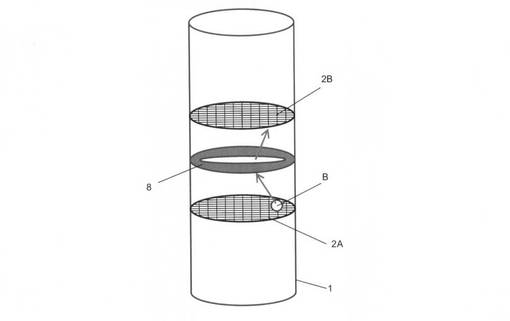
<第4の実施例>
図9は第4の実施例を示す説明図である。同図は上流側センサ部2Aと下流側センサ部2Bとの間にオリフィス(障害物)8が存在する場合である。この場合でも問題なく所望の気泡Bの三次元流速を検出することができる。ちなみに、流路1の軸方向に関する一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0052】
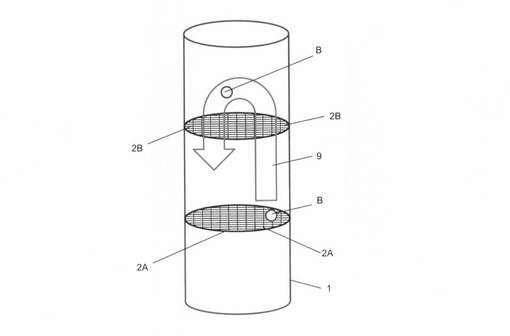
<第5の実施例>
図10は第5の実施例を示す説明図である。同図に示すように、本実施例に示すように上流側センサ部2Aと下流側センサ部2Bとの間での流体の対流に伴う気泡Bの軌跡9も追跡することができる。ちなみに、流路1に軸方向に関する一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0053】
以上、本発明を実施の形態とともに詳細に説明したが、本発明は上記実施の形態に限られるものではない。例えば、センサ部2はワイヤメッシュセンサを用いたが、これに限る必要はない。流路1の軸に直交する面内の複数位置に分散配設された計測点における流体の相状態を表わす出力信号を送出することができるセンサであればそれ以上の限定はない。また、測定対象を気液二相流における気泡に限定する必要もない。一般には、インピーダンスが異なる複数の測定対象が混合された流体における一つあるいは複数の測定対象を特定して測定対象毎に三次元速度を計測することができる。
【0054】
さらに、演算処理部も、下流側センサ部の所定の領域において最大の相互相関を有する計測点を特定し上流側センサ部の特定の計測点との間でのベクトル情報を処理するように構成されていれば良い。
【0055】
また、気泡の径毎の弁別はウェーブレット解析を利用してこれを行ったが、周波数により気泡径を弁別することができれば、例えばバンドパスフィルタを利用することによっても同様の目的は達成し得る。
【0056】
一方、液相との相対速度の差が2〜5cm/cmの小径の測定対象を弁別した周波数帯域の出力信号を演算処理部7に送出するように前処理部6を構成することもできる。この場合には、演算処理部7で求まる小気泡等、測定対象の三次元速度を液相の三次元速度とみなすことができ、実質的に液相の三次元速度を検出することができる。
【0057】
また、測定対象の大きさはその体積を演算することによっても弁別することができる。すなわち、前処理部で、流路1の面内の所定範囲における上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部2Aと下流側センサ部2Bの距離に基づき測定対象(例えば気泡B)の体積を求め、各体積毎に測定対象を弁別するとともに、演算処理部では前処理部で生成された体積毎の上流側出力信号および下流側出力信号を処理の対象とする所定の演算処理を行うように構成することもできる。この場合には、測定対象の体積毎にセンサ部の出力信号を抽出することにより測定対象の体積に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。
【0058】
さらに、演算処理部7は、各気泡の三次元流速の面内方向成分に基づき当該面内における各気泡の移動方向を検出して各気泡の所定時間内における挙動をモニタ装置4に可視化して表示するようにしても良い。この場合には、流体の流れ方向に直交する面内における気泡の挙動、すなわち旋回の様子等を可視化して視認することができる。
【産業上の利用可能性】
【0059】
本発明は流路を流れる気液二相流の流れ場における気泡の三次元相速度を計測する産業分野で有効に利用することができる。
【符号の説明】
【0060】
1,1A,1B 流路
2 センサ部
2A 上流側センサ部
2B 下流側センサ部
3 演算処理装置
4 モニタ装置
5 記憶部
6 前処理部
7 演算処理部
【技術分野】
【0001】
本発明は三次元速度の計測システムに関し、特に原子炉や火力発電所等のプラントにおける気液二相流状態における流れ場の気泡の三次元相速度を計測する場合に適用して有用なものである。
【背景技術】
【0002】
沸騰水型原子炉の安全評価に係る二相流解析は、冷却材の流れを正確に評価するため、一次元から三次元モデルに移行しつつある。その中で、沸騰二相流を含む三次元熱流動解析コードは、精度の良い三次元二相流動の実験データによる検証が必要である。この種のデータを得るための計測システムとしてセンサ部をワイヤメッシュセンサで構成したものが知られている(非特許文献1参照)。
【0003】
ワイヤメッシュセンサは、図11(a)に示すように、流体が流れる管路01の軸方向において所定の距離を隔てて交叉させるとともに、図11(b)に示すように管路01の断面内で正方格子状に配設された第1のワイヤ電極02および第2のワイヤ電極03を有しており、第1のワイヤ電極02を励起電極および第2のワイヤ電極03を計測電極とするインピーダンスセンサである。ワイヤ同士は近接しているが、接触はしていない。以下、第1のワイヤ電極02および第2のワイヤ電極03の交点を計測点という。したがって、計測点はワイヤメッシュセンサの面内に正方格子状に分散されて多数形成されている。
【0004】
かかるワイヤメッシュセンサは、図12に示すように、第1のワイヤ電極02で形成する入力線にはスイッチS1,S2,S3,S4により一列目から順に励起パルス(入力信号)PIが印加される。ここで、励起パルスPIは電源04から切替スイッチSPを介して供給される。
【0005】
上述の如き励起パルスPIの印加に伴い、計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])におけるインピーダンスは、各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])を短絡する流体の状態に応じて変化する。この結果、第2のワイヤ電極03で形成する出力線には各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])のインピーダンスを反映した計測信号(出力信号)PO1、PO2、PO3、PO4が各行毎に出力される。いま、スイッチS4を閉にすることによってスイッチS4に接続された第1のワイヤ電極02に励起パルスPIが印加された場合を考える。この場合において、計測点[2,4]に気泡05が存在する一方、他の計測点[1,4],[3,4],[4,4]近傍が液体で満たされていると、計測点[2,4]におけるインピーダンスが、他の計測点[1,4],[3,4],[4,4]におけるインピーダンスよりも小さくなるので、この計測点[2,4]に対応する第2のワイヤ電極03を介して得られる計測信号PO2は他の計測信号PO1,PO3,PO4よりも低いインピーダンスとして検出される。すなわち、計測信号PO1、PO3、PO4の平均レベルは計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])における気液二相流における液体(例えば水)と気体(気泡05)の存在量を反映したものとなる。この結果、計測信号PO1〜PO4を演算処理部06で処理することにより各計測点([1,1],[2,1],[3,1],[4,1])・・・([1,4],[2,4],[3,4],[4,4])における、例えば気液二相流における気液の割合等、所望の物質の存在量を演算により計測することができる。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】H.Pietruske.H.-M.Prasser/Flow Measurement and Instrumentation 18(2007) 87-94
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の如きワイヤメッシュセンサを流体の流れ方向に関して上下二箇所に配設すれば二組のワイヤメッシュセンサの各出力信号の時間差により気泡の速度も計測可能である。すなわち、上下流のワイヤメッシュセンサにおいてそれぞれ対応する一点間では相互相関分析による主流方向一次元での気泡速度計測を行うことができる。ところが、この場合の気泡速度の計測は流れ方向一次元の評価に止まる。
【0008】
本発明は、上記問題点に鑑み、気泡等、測定対象の三次元流速を容易かつ適確に検出することができる三次元速度の計測システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成する本発明の第1の態様は、
流路を流れる測定対象のインピーダンスを反映した計測信号である出力信号を送出するセンサ部と、
前記出力信号を処理して前記測定対象の速度を計測する演算処理手段とを具備するとともに、
前記センサ部は、
前記流路内において前記測定対象の流れの中の面内の複数位置に配設された上流側計測点における前記測定対象のインピーダンスを表わす上流側出力信号を送出する上流側センサ部と、
流体の流れ方向の下流側における前記面と同様の他の面内で前記上流側計測点に対応させて複数配設された下流側計測点における前記測定対象のインピーダンスを表わす下流側出力信号を送出する下流側センサ部とを有する一方、
前記演算処理手段は、特定の前記上流側計測点に関する前記上流側計測信号と前記下流側センサの所定の領域に含まれる前記下流側計測点で計測された前記下流側出力信号との相互相関をとることにより相互相関係数が最大となる前記下流側計測点を特定するとともに、前記相互相関を前記上流側計測点のそれぞれに関してとることにより各相互相関係数が最大となる前記下流側計測点をそれぞれ特定し、前記各上流側計測点を通過して前記各下流側計測点に至った前記測定対象の三次元的な流速をそれぞれ演算するように構成したことを特徴とする三次元速度の計測システムにある。
【0010】
本態様によれば、測定対象が移動した三次元的な軌跡を特定でき、その軌跡における移動距離と移動に要した時間とに基づき、上流側センサ部から下流側センサ部に移動した測定対象の三次元的な移動速度に関する情報を容易、かつ適確に得ることができる。
【0011】
本発明の第の2の態様は、
第1の態様に記載する三次元速度の計測システムにおいて、
前記上流側センサ部および下流側センサ部はワイヤメッシュセンサで構成したことを特徴とする三次元速度の計測システムにある。
【0012】
本態様によれば、上流側および下流側センサ部を良好に構成することができる。
【0013】
本発明の第3の態様は、
第1または第2の態様に記載する三次元速度の計測システムにおいて、
前記演算処理手段は、
前記上流側出力信号における前記特定の上流側計測点に対応する成分と前記下流側出力信号における前記相互相関係数が最大となる前記下流側計測点に対応する成分との時間差と、
前記上流側センサ部と前記下流側センサ部間の前記軸方向に沿う距離と、前記特定の上流側計測点に対応する下流側計測点の座標から前記相互相関係数が最大となる前記下流側計測点の座標までの前記面内での距離とに基づき前記特定の上流側計測点と前記相互相関係数が最大となる前記下流側計測点との間の距離を演算し、
前記時間差と前記距離とに基づき前記測定対象の三次元的な流速を演算するものであることを特徴とする三次元速度の計測システムにある。
【0014】
本態様によれば、上流側センサ部と下流側センサ部との流れ方向に沿う距離と、特定の上流側計測点に対応する下流側計測点から相互相関係数が最大となる下流側計測点までの下流側センサ部の面内における距離とに基づき特定の上流側計測点から前記相互相関係数が最大となる下流側計測点までの距離を求め、この距離を測定対象の三次元的な移動時間である時間差で除することにより容易かつ適確に所望の三次元的な測定対象の移動速度を求めることができる。
【0015】
本発明の第4の態様は、
第1〜第3の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記上流側出力信号および下流側出力信号を所定の周波数帯域毎に弁別して複数の周波数帯域毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された周波数帯域毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システムにある。
【0016】
本態様によれば、センサ部の出力信号を所定の周波数帯域毎に抽出することにより測定対象の径に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。この結果、気泡の径毎に異なる特徴的な挙動を容易かつ適確に把握することができる。ちなみに、高ボイド率での二相流動では数10cmの大きな径を持つ大気泡や数mm程度の小気泡が混在し、複雑な多次元性を持つ。これは、気泡の大きさによって浮力や抗力等の影響の度合いが違うことに起因して大気泡および小気泡が異なる挙動を示すためであるが、本態様によれば、例えば大気泡や小気泡が混在する測定対象において、複雑な多次元性をもつ流体における測定対象の挙動をその径毎に求まる三次元速度情報を利用することができるので、測定対象物の高精度な3次元速度の計測が可能になる。
【0017】
本発明の第5の態様は、
第1〜第3の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記面内の所定範囲における前記上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部と下流側センサ部との距離に基づき前記測定対象を体積毎に弁別して複数の体積毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された体積毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システムにある。
【0018】
本態様によれば、測定対象の体積毎にセンサ部の出力信号を抽出することにより測定対象の体積に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。この結果、気泡の体積毎に異なる特徴的な挙動を容易かつ適確に把握することができる。
【0019】
本発明の第6の態様は、
第4の態様に記載する三次元速度の計測システムにおいて、
前記前処理部は前記上流側出力信号および下流側出力信号のウェーブレット解析を行うものであることを特徴とする三次元速度の計測システムにある。
【0020】
本態様によればセンサ部の出力信号のウェーブレット解析により測定対象の径毎の三次元移動速度の情報を容易かつ適確に得ることができる。
【0021】
本発明の第7の態様は、
上記第4〜第6の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記前処理部は、液相との相対速度の差が2〜5cm/secの測定対象に基づく前記上流側出力信号および下流側出力信号を前記演算処理部に送出するように構成したことを特徴とする三次元速度の計測システムにある。
【0022】
本態様によれば、演算処理部で求まる測定対象の三次元速度を液相の三次元速度とみなすことができ、実質的に液相の三次元速度を検出することができる。ちなみに、従来技術において液相の速度を計測するには、流体中にトレーサを投入し、このトレーサの移動をレーザー光と撮像手段等とを用いて、例えばPIV(Particle Image Velocimetry)等により追跡する必要があったが、本態様によれば所定の小気泡等の測定対象の速度を検出することで実質的な液相の三次元流速を容易に計測することができる。ちなみに、この場合、実質的に液相と見なすことができる測定対象は、センサ部におけるサンプリング周波数が1kHzである場合、このサンプリング周波数と同程度の周波数帯域で弁別される気泡等であるが、気泡であれば径が1mm程度のものである。
【0023】
本発明の第8の態様は、
第1〜第7の態様の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記各測定対象の三次元流速の前記面内方向成分に基づき前記面内における前記各測定対象の移動方向を検出して前記測定対象の所定時間内における挙動を表示部に可視化して表示するものであることを特徴とする三次元速度の計測システムにある。
【0024】
本態様によれば、流れ方向に直交する面内における気泡等、測定対象の挙動、すなわち旋回の様子等を可視化して視認することができる。
【発明の効果】
【0025】
本発明によれば、測定対象が移動した三次元的な軌跡を特定でき、その軌跡における移動距離と移動に要した時間とに基づき、上流側センサ部から下流側センサ部に移動した測定対象の三次元的な移動速度に関する情報を容易、かつ適確に得ることができる。この結果、上下流のセンサ部においてそれぞれ対応する一点間での相互相関分析による主流方向一次元での速度計測を行なう従来技術に較べ、時間分解能を飛躍的に向上させることができる。従来では短時間で変化する二相流動の多次元性を正確に評価できないのに対し、本発明では、多点相互相関分析により少ないフレーム数での相互相関分析を可能とし、高時間分解能での多次元相速度ベクトルを求めることができるからである。
【0026】
さらに、ウェーブレット解析等の前処理を行なうことにより、径や体積が異なる測定対象物毎の特徴的な挙動の解析を適確に行うことができる。特に、測定対象物の速度を液相の速度とみなしてトレーサを使用するPIV法等によらず簡易に実質的な液相の速度を検出することも可能になる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の形態に係る三次元速度の計測システムの全体を示すブロック線図である。
【図2】上記実施の形態における全体的な信号処理の概要を示すフロー図である。
【図3】上記実施の形態における計測原理を概念的に示す説明図である。
【図4】上記実施の形態における具体的な信号処理の手順を示すフローチャートである。
【図5】従来技術に係る計測における問題点を説明するための説明図である。
【図6】本発明の他の変形例である第1の実施例を示す説明図である。
【図7】本発明の他の変形例である第2の実施例を示す説明図である。
【図8】本発明の他の変形例である第3の実施例を示す説明図である。
【図9】本発明の他の変形例である第4の実施例を示す説明図である。
【図10】本発明の他の変形例である第5の実施例を示す説明図である。
【図11】ワイヤメッシュセンサを示す説明図である。
【図12】計測原理も含めたワイヤメッシュセンサを概念的に示す説明図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
【0029】
本発明の実施の形態に係る三次元速度の計測システムの全体を示すブロック線図である。同図に示すように、本形態に係る三次元速度の計測システムは、気泡Bを含む流体が流通する流路1の上流側と下流側の少なくとも二箇所に配設された上流側センサ部2A,2Bからなるセンサ部2と、センサ部2から送出された計測信号である出力信号に対して所定の演算処理を行なう演算処理装置3と、演算処理装置3で所定の演算処理を行なった出力信号が表す気液二相流に関する所定の情報を可視化するモニタ装置4とを有する。
【0030】
ここで、本形態におけるセンサ部2は、本形態の場合、図11に示すワイヤメッシュセンサ(以下、WMSともいう。)で構成してある。したがって、それぞれの面内には多数の上流側計測点および下流側計測点がマトリクス状に配設されている。また、測定対象は気液二相流における気泡である。
【0031】
演算処理装置3は、記憶部5、前処理部6および演算処理部7を有している。記憶部5は、センサ部2の出力信号であり、上流側センサ部2A、下流側センサ部2Bの上流側計測点および下流側計測点における流体のインピーダンスを反映した上流側出力信号および下流側出力信号を一旦記憶する。前処理部6は記憶部5に記憶された上流側出力信号および下流側出力信号を読み出して所定の前処理を行なう。本形態では、各計測点からの出力信号のウェーブレット変換を行なうことにより、上流側出力信号および下流側出力信号の全体的なウェーブレット解析を行なう。これにより、小気泡ほど周波数が高く、大気泡ほど周波数が低い信号として気泡の径毎に弁別されたスケール1〜スケールNのN種類の信号を得る。ここで、スケールとはサンプリング周期を表わしており、スケール1はサンプリング周波数が1kHzの場合で周期が1msecの信号であり、スケールNは周期がN(Nは自然数)msecの信号であることを意味している。
【0032】
演算処理部7は、まず上流側センサ部2Aの特定の上流側計測点に関する上流側計測信号と、下流側センサ部2Bの所定の領域に含まれる複数の下流側計測点における下流側出力信号との相互相関をとることにより相互相関係数が最大となる下流側計測点を特定する。そして、同様の相関処理を上流側計測点のそれぞれに関して行なうことにより各相互相関係数が最大となる下流側計測点をそれぞれ特定して、気泡Bの三次元的な流速をそれぞれ演算する。かかる演算の具体的な内容に関しては上流側出力信号と下流側出力信号に関する信号処理手法として後に詳述する。また、かかる信号処理は、ウェーブレット解析後の各スケール1〜Nのそれぞれの信号に対して行なう。すなわち、所定の小気泡から大気泡のそれぞれを表わす上流側出力信号および下流側出力信号の任意に選択した一部または全部に対して行う。
【0033】
図2は本実施の形態における全体的な信号処理の概要を示すフロー図である。同図に示すように、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報に関し、各成分の連続ウェーブレット変換を行なう(ステップST01参照)。ここで、「連続」とは全ての周波数成分に対してウェーブレット変換を行なうことを意味する。本態様では、連続ウェーブレット変換を行なっているが、これは特定の離散的な周波数に関し必要に応じて行なっても勿論構わない。
【0034】
この結果、気泡の径毎に弁別されたWMS出力信号がi×j×kの行列として各気泡の径毎にN種類の情報として得られる(ステップST021〜ST02N参照)。これをスケール1〜Nで表す。
【0035】
次に、詳細は後述するが、気泡信号抽出のための多点間相互相関分析を行い(ステップST03参照)、続けて各スケール1〜N毎に三次元気泡速度を演算する(ステップST041〜ST04N)。
【0036】
なお、上記ステップST01およびST021〜ST02Nの処理は前処理部6で、ステップST03およびST041〜ST04Nの処理は演算処理部7でそれぞれ実行される。
【0037】
上述の多点間相互相関分析および三次元気泡速度の演算処理の原理を図3に基づき説明する。図3(a)に示すように、まず上流側センサ部2A(図中の「1stWMS」;以下同じ)の特定の上流側計測点(図中に黒塗り部で示す計測点)における上流側計測信号と、下流側センサ部2B(図中の「2ndWMS」;以下同じ)の所定の領域(図中の「Nx×Ny領域」;以下同じ)に含まれる複数の下流側計測点における下流側出力信号との相互相関をとることにより相互相関係数が最大となる下流側計測点を特定する。図3(a)では色の濃淡で、1stWMSにおける計測点の信号との相関係数の大きさの程度を表している。ここで、1stWMSの特定の計測点を通過した気泡は2ndWMSの最大相関係数を与える下流側計測点に至ったと考えられる。
【0038】
そこで、図3(b)に示すように、1stWMSの特定の計測点から、流れ方向に沿い(図では鉛直方向)2ndWMSの対応する下流側計測点に至る距離ベクトルをuG,zとし、距離ベクトルをuG,zを起点として2ndWMSの面内(図では水平面内)を通って最大相関係数を与える2ndWMSの下流側計測点に至り、この下流側計測点を終点とする距離ベクトルをuG,xyとした場合、気泡の移動距離を表す三次元距離ベクトルuGは、距離ベクトルuG,zと距離ベクトルをuG,xyとのベクトル和として与えられる。ここで、距離ベクトルuG,zは1stWMSと2ndWMSとの流れ方向に沿う間隔として、また距離ベクトルuG,xyは2ndWMSの面であるxy平面内の前記起点の座標と終点の座標との間の距離として与えられる。一方、気泡が1stWMSの特定の上流側計測点から2ndWMSの最大相関係数を与える下流側計測点に至る時間は両者の間の時間差を表す情報として別途与えられている。そこで、三次元距離ベクトルuGと時間差情報とに基づき三次元の気泡速度を演算することができる。
【0039】
1stWMSの各上流側計測点に関し2ndWMSの所定の領域に含まれる複数の下流側計測点における相互相関をとる上述の如き一連の処理を行なうことにより各上流側計測点を通過する気泡の三次元流速を求めることができる。ここで、2ndWMSにおける所定の領域は2ndWMSの全域を対象領域とする場合まで任意に拡張設定を行うことができる。例えば、一回目の相互相関で最大の相関係数を与える下流側計測点が領域の端部に存在し、端部を越えて相関係数が高くなる領域の存在の可能性が考えられる場合には、領域を広げて再度相互相関を取り直す等の処理を行なうことにより相互相関処理の適正化を図ることができる。
【0040】
図4は、本形態の演算処理装置3における信号処理の具体的な手順を示すフローチャートである。同図に示すように、演算処理装置3における情報処理は、前処理部6で行なうウェーブレット解析Iと、これに続き演算処理部7で行なう多点間相互相関分析IIに分けられる。同図に示すように、ウェーブレット解析Iは、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報を記憶部5から読み込むことで開始される(ステップST1参照)。1〜kの各時間毎に特定の座標位置(x、y)の計測点でのウェーブレット変換を行なう。計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ1参照)とともに、計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ2参照)。
【0041】
この結果、任意のスケールに関して上流側出力信号および下流側出力信号であるWMS信号成分が選択される(ステップST3参照)。
【0042】
多点間相互相関分析IIは特定のスケール1〜N毎にステップST3で選択されたWMS信号成分を用いて行なう。そこで、特定のスケールに関し、各計測点における上流側センサ部2Aおよび下流側センサ部2Bの出力信号の成分として検出されるi(x軸線分)、j(y軸成分)、k(時間軸成分)の各成分からなる行列情報を前処理部5から読み込む(ステップST4参照)。その後、所定のウェーブレット変換が完了した上流側センサ部2Aからの特定の上流側出力信号と、下流側センサ部2Bの面内でx方向、y方向にずらした計測点の下流側出力信号とに基づき両者の相互相関をとる。かかる処理を1〜kの各時間毎に行なう(ステップST5参照)。続いて下流側センサ部2Bの所定の領域内における各計測点における相互相関係数の最大値と、この最大値を与える時間差とを格納する(ステップST6参照)。下流側計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ3参照)とともに、計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ4参照)。
【0043】
その後、相関係数が最大値を示す下流側センサ部2Bの面内における座標(x、y)と、そのときの時間差とを選択し(ステップST7参照)、続いて前記座標(x、y)、予め与えられる上流側センサ部2Aと下流側センサ部2Bとの間隔(z)および前記時間差から三次元気泡速度を求める(ステップST8参照)。上流側計測点の座標位置をx方向に順次ずらしながら同様の処理をi=1〜iに関して行なう(ループ1参照)とともに、上流側計測点の座標位置をy方向に順次ずらしながら同様の処理をj=1〜jに関して行なう(ループ4参照)ことにより一連の処理を終了する(ステップST9参照)する。
【0044】
かかる一連の処理を行なえば上流側センサ部2Aから下流側センサ部2Bに移動した気泡の三次元的な移動速度に関する情報を容易、かつ適確に得ることができるが、上流側センサ部2Aの特定の計測点に対し下流側センサ部2Bにおいて対応する流れ方向に沿う一点間での相互相関分析による一次元の気泡速度計測を行なう従来技術に較べ、時間分解能を飛躍的に向上させることができる。
【0045】
この点に関し図5に基づきさらに詳細に説明する。図5(a)に示すように、上流側センサ部2Aの特定の計測点(図(a)の黒塗り部)に対し下流側センサ部2Bにおいて対応する流れ方向に沿う一点である計測点(図(a)の白抜き部)間での相互相関分析による一次元のベクトルuG,zを用いて気泡速度計測を行なう場合には、図5(b)にベクトルuG,zとして示すように気泡の流れ方向が下流側センサ部2Bの面(水平面)内において大きくずれた場合、計測時間を短くすると下流側センサ部2Bの計測点から外れてしまうため相関を採ることができない。したがって、ある程度長い計測時間を設定してその間の平均化された信号に基づき一次元の相関を採らざるを得ないからである。本形態によれば、サンプリング周期を短くしても、下流側センサ部2Bの面内に広がる多数の計測点のいずれかで上流側センサ部の特定の計測点を通過した気泡の下流側センサ部2Bの通過を確実に検出することができ、当該計測における時間分解能の飛躍的な改善を図ることができる。
【0046】
本形態においては図1に示すものに限らず、流路の形状やセンサ部の構成を変更した種々の変形例が考えられる。これらを第1〜第5の実施例として説明しておく。
【0047】
<第1の実施例>
図6は第1の実施例を示す説明図である。同図に示すように、本実施例では上流側センサ部2Aに対し流路1の軸方向に分散させて多数の下流側センサ部2B,・・・,2Nを配設したものである。
【0048】
本実施例によれば、気泡Bの三次元流速に基づきその三次元的な挙動を計測することができる。
【0049】
<第2の実施例>
図7は第2の実施例を示す説明図である。同図に示すように、センサ部を配設する流路は曲管(エルボ管)1Aであっても良い。この場合でも上流側センサ部2A、下流側センサ部2B,2C,2D,2E,2F,2Gの各出力信号を上述の如く処理することで、各上流側センサ部2A、下流側センサ部2B〜2Gの各計測点における気泡Bの三次元流速を求めることができ、これにより気泡Bの移動方向を追跡することができる。ちなみに、流路1Aの軸方向に設定される一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0050】
<第3の実施例>
図8は第3の実施例を示す説明図である。同図に示すように本例は、流路1Bがレデューサ部を有する場合である。流路1Bの板面積が変化してもそれに合わせて上流側センサ部2Aの面積に対し下流側センサ部2Bの面積を変更すれば問題なく所望の計測を行うことができる。具体的には、WMSのメッシュ間隔を変更すれば良い。
【0051】
<第4の実施例>
図9は第4の実施例を示す説明図である。同図は上流側センサ部2Aと下流側センサ部2Bとの間にオリフィス(障害物)8が存在する場合である。この場合でも問題なく所望の気泡Bの三次元流速を検出することができる。ちなみに、流路1の軸方向に関する一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0052】
<第5の実施例>
図10は第5の実施例を示す説明図である。同図に示すように、本実施例に示すように上流側センサ部2Aと下流側センサ部2Bとの間での流体の対流に伴う気泡Bの軌跡9も追跡することができる。ちなみに、流路1に軸方向に関する一次元情報のみを処理する従来技術ではこの場合の気泡の速度を検出することはできない。
【0053】
以上、本発明を実施の形態とともに詳細に説明したが、本発明は上記実施の形態に限られるものではない。例えば、センサ部2はワイヤメッシュセンサを用いたが、これに限る必要はない。流路1の軸に直交する面内の複数位置に分散配設された計測点における流体の相状態を表わす出力信号を送出することができるセンサであればそれ以上の限定はない。また、測定対象を気液二相流における気泡に限定する必要もない。一般には、インピーダンスが異なる複数の測定対象が混合された流体における一つあるいは複数の測定対象を特定して測定対象毎に三次元速度を計測することができる。
【0054】
さらに、演算処理部も、下流側センサ部の所定の領域において最大の相互相関を有する計測点を特定し上流側センサ部の特定の計測点との間でのベクトル情報を処理するように構成されていれば良い。
【0055】
また、気泡の径毎の弁別はウェーブレット解析を利用してこれを行ったが、周波数により気泡径を弁別することができれば、例えばバンドパスフィルタを利用することによっても同様の目的は達成し得る。
【0056】
一方、液相との相対速度の差が2〜5cm/cmの小径の測定対象を弁別した周波数帯域の出力信号を演算処理部7に送出するように前処理部6を構成することもできる。この場合には、演算処理部7で求まる小気泡等、測定対象の三次元速度を液相の三次元速度とみなすことができ、実質的に液相の三次元速度を検出することができる。
【0057】
また、測定対象の大きさはその体積を演算することによっても弁別することができる。すなわち、前処理部で、流路1の面内の所定範囲における上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部2Aと下流側センサ部2Bの距離に基づき測定対象(例えば気泡B)の体積を求め、各体積毎に測定対象を弁別するとともに、演算処理部では前処理部で生成された体積毎の上流側出力信号および下流側出力信号を処理の対象とする所定の演算処理を行うように構成することもできる。この場合には、測定対象の体積毎にセンサ部の出力信号を抽出することにより測定対象の体積に起因する、すなわち、例えば小気泡から大気泡に至る気泡の種類に応じた気泡の三次元速度情報を得ることができる。
【0058】
さらに、演算処理部7は、各気泡の三次元流速の面内方向成分に基づき当該面内における各気泡の移動方向を検出して各気泡の所定時間内における挙動をモニタ装置4に可視化して表示するようにしても良い。この場合には、流体の流れ方向に直交する面内における気泡の挙動、すなわち旋回の様子等を可視化して視認することができる。
【産業上の利用可能性】
【0059】
本発明は流路を流れる気液二相流の流れ場における気泡の三次元相速度を計測する産業分野で有効に利用することができる。
【符号の説明】
【0060】
1,1A,1B 流路
2 センサ部
2A 上流側センサ部
2B 下流側センサ部
3 演算処理装置
4 モニタ装置
5 記憶部
6 前処理部
7 演算処理部
【特許請求の範囲】
【請求項1】
流路を流れる測定対象のインピーダンスを反映した計測信号である出力信号を送出するセンサ部と、
前記出力信号を処理して前記測定対象の速度を計測する演算処理手段とを具備するとともに、
前記センサ部は、
前記流路内において前記測定対象の流れの中の面内の複数位置に配設された上流側計測点における前記測定対象のインピーダンスを表わす上流側出力信号を送出する上流側センサ部と、
流体の流れ方向の下流側における前記面と同様の他の面内で前記上流側計測点に対応させて複数配設された下流側計測点における前記測定対象のインピーダンスを表わす下流側出力信号を送出する下流側センサ部とを有する一方、
前記演算処理手段は、特定の前記上流側計測点に関する前記上流側計測信号と前記下流側センサの所定の領域に含まれる前記下流側計測点で計測された前記下流側出力信号との相互相関をとることにより相互相関係数が最大となる前記下流側計測点を特定するとともに、前記相互相関を前記上流側計測点のそれぞれに関してとることにより各相互相関係数が最大となる前記下流側計測点をそれぞれ特定し、前記各上流側計測点を通過して前記各下流側計測点に至った前記測定対象の三次元的な流速をそれぞれ演算するように構成したことを特徴とする三次元速度の計測システム。
【請求項2】
請求項1に記載する三次元速度の計測システムにおいて、
前記上流側センサ部および下流側センサ部はワイヤメッシュセンサで構成したことを特徴とする三次元速度の計測システム。
【請求項3】
請求項1または請求項2に記載する三次元速度の計測システムにおいて、
前記演算処理手段は、
前記上流側出力信号における前記特定の上流側計測点に対応する成分と前記下流側出力信号における前記相互相関係数が最大となる前記下流側計測点に対応する成分との時間差と、
前記上流側センサ部と前記下流側センサ部間の前記軸方向に沿う距離と、前記特定の上流側計測点に対応する下流側計測点の座標から前記相互相関係数が最大となる前記下流側計測点の座標までの前記面内での距離とに基づき前記特定の上流側計測点と前記相互相関係数が最大となる前記下流側計測点との間の距離を演算し、
前記時間差と前記距離とに基づき前記測定対象の三次元的な流速を演算するものであることを特徴とする三次元速度の計測システム。
【請求項4】
請求項1〜請求項3の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記上流側出力信号および下流側出力信号を所定の周波数帯域毎に弁別して複数の周波数帯域毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された周波数帯域毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システム。
【請求項5】
請求項1〜請求項3の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記面内の所定範囲における前記上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部と下流側センサ部との距離に基づき前記測定対象を体積毎に弁別して複数の体積毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された体積毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システム。
【請求項6】
請求項4に記載する三次元速度の計測システムにおいて、
前記前処理部は前記上流側出力信号および下流側出力信号のウェーブレット解析を行うものであることを特徴とする三次元速度の計測システム。
【請求項7】
請求項4〜請求項6の何れか一つに記載する三次元速度の計測システムにおいて、
前記前処理部は、液相との相対速度の差が2〜5cm/secの測定対象に基づく前記上流側出力信号および下流側出力信号を前記演算処理部に送出するように構成したことを特徴とする三次元速度の計測システム。
【請求項8】
請求項1〜請求項7の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記各測定対象の三次元流速の前記面内方向成分に基づき前記面内における前記各測定対象の移動方向を検出して前記測定対象の所定時間内における挙動を表示部に可視化して表示するものであることを特徴とする三次元速度の計測システム。
【請求項1】
流路を流れる測定対象のインピーダンスを反映した計測信号である出力信号を送出するセンサ部と、
前記出力信号を処理して前記測定対象の速度を計測する演算処理手段とを具備するとともに、
前記センサ部は、
前記流路内において前記測定対象の流れの中の面内の複数位置に配設された上流側計測点における前記測定対象のインピーダンスを表わす上流側出力信号を送出する上流側センサ部と、
流体の流れ方向の下流側における前記面と同様の他の面内で前記上流側計測点に対応させて複数配設された下流側計測点における前記測定対象のインピーダンスを表わす下流側出力信号を送出する下流側センサ部とを有する一方、
前記演算処理手段は、特定の前記上流側計測点に関する前記上流側計測信号と前記下流側センサの所定の領域に含まれる前記下流側計測点で計測された前記下流側出力信号との相互相関をとることにより相互相関係数が最大となる前記下流側計測点を特定するとともに、前記相互相関を前記上流側計測点のそれぞれに関してとることにより各相互相関係数が最大となる前記下流側計測点をそれぞれ特定し、前記各上流側計測点を通過して前記各下流側計測点に至った前記測定対象の三次元的な流速をそれぞれ演算するように構成したことを特徴とする三次元速度の計測システム。
【請求項2】
請求項1に記載する三次元速度の計測システムにおいて、
前記上流側センサ部および下流側センサ部はワイヤメッシュセンサで構成したことを特徴とする三次元速度の計測システム。
【請求項3】
請求項1または請求項2に記載する三次元速度の計測システムにおいて、
前記演算処理手段は、
前記上流側出力信号における前記特定の上流側計測点に対応する成分と前記下流側出力信号における前記相互相関係数が最大となる前記下流側計測点に対応する成分との時間差と、
前記上流側センサ部と前記下流側センサ部間の前記軸方向に沿う距離と、前記特定の上流側計測点に対応する下流側計測点の座標から前記相互相関係数が最大となる前記下流側計測点の座標までの前記面内での距離とに基づき前記特定の上流側計測点と前記相互相関係数が最大となる前記下流側計測点との間の距離を演算し、
前記時間差と前記距離とに基づき前記測定対象の三次元的な流速を演算するものであることを特徴とする三次元速度の計測システム。
【請求項4】
請求項1〜請求項3の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記上流側出力信号および下流側出力信号を所定の周波数帯域毎に弁別して複数の周波数帯域毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された周波数帯域毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システム。
【請求項5】
請求項1〜請求項3の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記面内の所定範囲における前記上流側出力信号および下流側出力信号の所定時間内の時系列データおよび上流側センサ部と下流側センサ部との距離に基づき前記測定対象を体積毎に弁別して複数の体積毎の複数の前記上流側出力信号および下流側出力信号を生成させる前処理部と、
前記前処理部で生成された体積毎の前記上流側出力信号および下流側出力信号を処理の対象とする演算処理部とを有するものであることを特徴とする三次元速度の計測システム。
【請求項6】
請求項4に記載する三次元速度の計測システムにおいて、
前記前処理部は前記上流側出力信号および下流側出力信号のウェーブレット解析を行うものであることを特徴とする三次元速度の計測システム。
【請求項7】
請求項4〜請求項6の何れか一つに記載する三次元速度の計測システムにおいて、
前記前処理部は、液相との相対速度の差が2〜5cm/secの測定対象に基づく前記上流側出力信号および下流側出力信号を前記演算処理部に送出するように構成したことを特徴とする三次元速度の計測システム。
【請求項8】
請求項1〜請求項7の何れか一つに記載する三次元速度の計測システムにおいて、
前記演算処理手段は、前記各測定対象の三次元流速の前記面内方向成分に基づき前記面内における前記各測定対象の移動方向を検出して前記測定対象の所定時間内における挙動を表示部に可視化して表示するものであることを特徴とする三次元速度の計測システム。
【図2】


【図4】
【図1】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図4】
【図1】
【図3】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−3052(P2013−3052A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136625(P2011−136625)
【出願日】平成23年6月20日(2011.6.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人日本伝熱学会、第48回日本伝熱シンポジウム 講演論文集 vol.II+III、P619−620、平成23年5月25日
【出願人】(000173809)一般財団法人電力中央研究所 (1,040)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人日本伝熱学会、第48回日本伝熱シンポジウム 講演論文集 vol.II+III、P619−620、平成23年5月25日
【出願人】(000173809)一般財団法人電力中央研究所 (1,040)
[ Back to top ]