
三足歩行ロボット
【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、趣味の分野で利用されている、また近い将来に労働を行う際に用いる可能性もある歩行ロボットの脚部の構造に関する。
【背景技術】
【0002】
従来の歩行ロボットは複数の可動する脚部を持ち、その脚部を動かすためのアクチュエータ、さらにそれを制御する制御回路やセンサーを搭載して歩行を実現するものであり、自動車に比べるとはるかに複雑で、その他にも様々な点で課題が存在し、そしてその問題の解決策として、胴体を支持するための「非可動の脚部」を搭載する歩行ロボットが発明され、それが以下の特許文献1に述べられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許公開2008−119820
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1の技術によれば、依然として三つの脚部を搭載しているためアクチュエータ、センサー、制御回路、制御ソフトウェアの製作や整備に多くの負担がかかるものであり、また特許文献1の技術は不整地などの様々な場面での運用を前提にして製作されたものであり、これに対して運用場面を限定し、機能を減らして簡略化させる事により、歩行ロボットの製作にかかる負担を軽減し、加えて重量軽減による歩行以外の機能を実現する装置や、または貨物の搭載量の増加を期待する事が出来る。
そこで本発明では、整地での運用を前提として、製作や整備の負担が従来よりも大幅に軽減され、また従来よりも搭載量の多い歩行ロボットの提供を課題とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、第一発明は、腰部中心に一足の移動動作のための脚部を持ち、なおかつこの脚部末端には胴体を一本の脚部で静止して支えられる大きさの面積を持つ足の裏を持ち、加えて脚部を持ち上げた時に腰部を支持できる支持脚を設置した事を特徴とする歩行ロボットである。
【発明の効果】
【0006】
第一発明によれば、移動のための脚部のアクチュエータの数が脚部一本分で済むため、その結果として制御回路が簡略化され、さらに制御ソフトウェアで制御しなければならないアクチュエータの数が減るためソフトウェアのプログラミングへの負担も軽減される事から、歩行ロボットの製作や整備への負担が大幅に軽減される。
また第一発明によれば、足の裏が広くなっているため転倒しにくくなり、この点においてもソフトウェアによる姿勢制御の負担を軽減させる事が出来る。
さらに第一発明によれば、従来であれば複数存在した可動する脚部が一本に減るため重量軽減の効果があり、その分だけその他の機能を多く搭載する事が可能となる。
【図面の簡単な説明】
【0007】
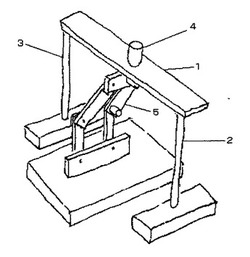
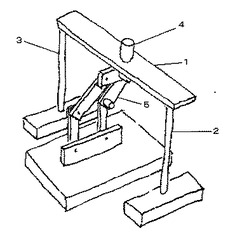
【図1】第一発明の一実施形態を表す斜視図である。
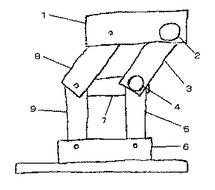
【図2】図1における中央脚部5の詳細構造を表す側面図である。
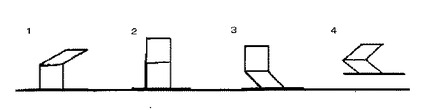
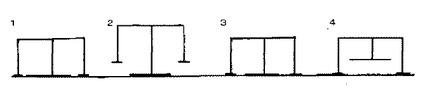
【図3】第一発明における中央脚部の歩行動作の例を略図で示した側面図である。
【図4】図3における中央脚部と支持脚の動きを略図で示した正面図である。
【技術分野】
【0001】
この発明は、趣味の分野で利用されている、また近い将来に労働を行う際に用いる可能性もある歩行ロボットの脚部の構造に関する。
【背景技術】
【0002】
従来の歩行ロボットは複数の可動する脚部を持ち、その脚部を動かすためのアクチュエータ、さらにそれを制御する制御回路やセンサーを搭載して歩行を実現するものであり、自動車に比べるとはるかに複雑で、その他にも様々な点で課題が存在し、そしてその問題の解決策として、胴体を支持するための「非可動の脚部」を搭載する歩行ロボットが発明され、それが以下の特許文献1に述べられている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許公開2008−119820
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら特許文献1の技術によれば、依然として三つの脚部を搭載しているためアクチュエータ、センサー、制御回路、制御ソフトウェアの製作や整備に多くの負担がかかるものであり、また特許文献1の技術は不整地などの様々な場面での運用を前提にして製作されたものであり、これに対して運用場面を限定し、機能を減らして簡略化させる事により、歩行ロボットの製作にかかる負担を軽減し、加えて重量軽減による歩行以外の機能を実現する装置や、または貨物の搭載量の増加を期待する事が出来る。
そこで本発明では、整地での運用を前提として、製作や整備の負担が従来よりも大幅に軽減され、また従来よりも搭載量の多い歩行ロボットの提供を課題とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、第一発明は、腰部中心に一足の移動動作のための脚部を持ち、なおかつこの脚部末端には胴体を一本の脚部で静止して支えられる大きさの面積を持つ足の裏を持ち、加えて脚部を持ち上げた時に腰部を支持できる支持脚を設置した事を特徴とする歩行ロボットである。
【発明の効果】
【0006】
第一発明によれば、移動のための脚部のアクチュエータの数が脚部一本分で済むため、その結果として制御回路が簡略化され、さらに制御ソフトウェアで制御しなければならないアクチュエータの数が減るためソフトウェアのプログラミングへの負担も軽減される事から、歩行ロボットの製作や整備への負担が大幅に軽減される。
また第一発明によれば、足の裏が広くなっているため転倒しにくくなり、この点においてもソフトウェアによる姿勢制御の負担を軽減させる事が出来る。
さらに第一発明によれば、従来であれば複数存在した可動する脚部が一本に減るため重量軽減の効果があり、その分だけその他の機能を多く搭載する事が可能となる。
【図面の簡単な説明】
【0007】
【図1】第一発明の一実施形態を表す斜視図である。
【図2】図1における中央脚部5の詳細構造を表す側面図である。
【図3】第一発明における中央脚部の歩行動作の例を略図で示した側面図である。
【図4】図3における中央脚部と支持脚の動きを略図で示した正面図である。
【特許請求の範囲】
【請求項1】
腰部中心に一足の移動動作のための脚部を持ち、なおかつこの脚部末端には胴体を一本の脚部で静止して支えられる大きさの面積を持つ足の裏を持ち、加えて脚部を持ち上げた時に腰部を支持できる支持脚を設置した事を特徴とする歩行ロボット
【請求項1】
腰部中心に一足の移動動作のための脚部を持ち、なおかつこの脚部末端には胴体を一本の脚部で静止して支えられる大きさの面積を持つ足の裏を持ち、加えて脚部を持ち上げた時に腰部を支持できる支持脚を設置した事を特徴とする歩行ロボット
【図4】第一発明の方向転換動作の例を略図で示した斜視図である。
【発明を実施するための形態】
【0008】
第一発明の一実施形態が図1であり、この実施形態は傾斜のない整地での運用を前提に製作した例であり、これについて説明する。
まず歩行ロボットの腰部1があり、その外側に腰部を支持する支持脚2と支持脚3が取り付けられており、この支持脚2と支持脚3は中央脚部が前後に移動または旋回しても転倒しないように、その間隔と脚部末端の前後の幅とを設定する必要がある。
そして腰部中央には中央脚部5を旋回させるために固定されたアクチュエータ4を介し、中央脚部5に接続されている。
この図1における中央脚部5については、図2を元に以下に詳述する。
まず股関節1に股関節アクチュエータ2が固定され、その隣には脚部末端の角度を股関節と一定にするためのリンク8が自由に可動する形で取り付けられている。
次に股関節アクチュエータ2を介し、腿部3が接続され、腿部3に固定された膝関節アクチュエータ4を介し、脛部5とリンク7が接続されるが、この時アクチュエータ4の出力軸で駆動されるのは脛部5のみであり、リンク7はアクチュエータ4の動力が伝わらずに同軸で自由に可動できるようにする。
そして脚部末端6に脛部5が、さらにその隣にはリンク9が接続され、リンク9のもう一方の端と、リンク8の股関節と接続されていない端、リンク7の膝関節と接続されていない端の部分が可動する形で接続される。
また脚部末端6の「足の裏」の部分は、この中央脚部で胴体を持ち上げた時に、支持脚が接地していない状態で胴体を前後左右に動かしても転倒しない程度の十分な前後左右の幅を必要とする。
次に、この実施形態を用いた移動動作の例を図3及び図4において示す。
図3の1及び図4の1は本実施形態における、中央脚部と支持脚がどちらも接地した状態である。
ここから腿部を直立させて図3の2の状態にすると胴体が持ち上がり支持脚が地面から離れると同時に胴体が前進し、これを正面図から見ると図4の2の状態になる。
そしてここから脛部を倒し図3の3の状態にすると胴体が下がると同時に、胴体がさらに前進して再び中央脚部と支持脚が両方とも接地した状態となり、これを正面図から見ると図4の3の状態になる。
さらに腿部を持ち上げて図3の4の状態にすると中央脚部が持ち上がり胴体は支持脚によって支持され、これを正面図から見ると図4の4の状態となる。
ここから脛部を下方向にまっすぐ伸びる位置に戻す事により図3の1及び図4の1に示した状態に戻り、上述の順に動作を繰り返すことで前進が、逆の順に繰り返すことで後退が出来る。
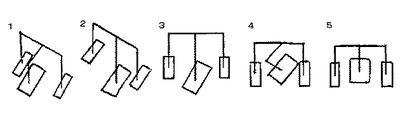
次に、この実施形態を用いた方向転換動作の例を図5に示す。
図5の1は本実施形態における、中央脚部と支持脚がどちらも接地した状態である。
ここから腿部を直立させて図5の2の状態にすると胴体が持ち上がり支持脚が地面から離れる。
次に腰部中央に設置された旋回用アクチュエータを用いて腰部及び支持脚の方向を転換させた状態が図5の3である。
そしてここから中央脚部の脛と腿を曲げて脚部を持ち上げ、支持脚のみで胴体を支えている状態が図5の4である。
この状態で中央脚部を進行方向に戻したものが図5の5であり、ここから図5の1に戻り中央脚部を再び接地させ、この動作を繰り返す事により方向転換動作を実現する。
図1における実施形態と運用法は以上であり、この方法で歩行による前進・後退・方向転換が実現できる。
【実施例】
【0009】
「実施形態の効果」
この実施形態によればリンク機構を用いて胴体と足の裏を平行に保てるため、足首の関節を駆動させるためのアクチュエータも省略でき、その結果として脚部に必要なアクチュエータは脚部の旋回・脚部を根元から持ち上げる股関節・膝関節の三つで歩行が実現可能であり、従来技術に比べてアクチュエータ・制御回路・制御ソフトウェアの製作や整備の負担が軽くなり、また重量の軽減・搭載量の増加にもつながる。
加えてこの実施形態であれば、同時に複数のアクチュエータを動かす必要が必ずしも無くなるため、また脚部の関節をどのような向きに移動させても転倒せずに立っていられるため、制御ソフトウェアでの姿勢制御プログラムの簡略化、必要な場合にはソフトウェアを介さない人間の手による手動制御での歩行が可能となり、さらにアクチュエータの動作に必ずしも俊敏さを求める必要がなくなるため、安価なアクチュエータを選び低コストを実現させることが出来、あるいはトルクの大きいアクチュエータを用いて更なる搭載量の増加を期待できる。
「他の実施形態」
本実施形態ではアクチュエータを関節部に取り付けて直接駆動しているが、別の実施形態では、モーターの配置を考慮してベルト、チェーン、リンク機構を用いて関節を駆動しても良い。
また本実施形態では傾斜のない整地での運用を前提にしたものであるが、斜面での運用を考慮し、アクチュエータの数を増やし腰部中央の足の裏と支持脚の足の裏の角度を変形させる機能、支持脚の左右の高さを変更する機能を加えて運用する事もできるが、ただしあくまでも移動と方向転換の動作は中央の脚部で行う事とする。
【図1】


【図2】
【図3】
【図4】
【図5】
【発明を実施するための形態】
【0008】
第一発明の一実施形態が図1であり、この実施形態は傾斜のない整地での運用を前提に製作した例であり、これについて説明する。
まず歩行ロボットの腰部1があり、その外側に腰部を支持する支持脚2と支持脚3が取り付けられており、この支持脚2と支持脚3は中央脚部が前後に移動または旋回しても転倒しないように、その間隔と脚部末端の前後の幅とを設定する必要がある。
そして腰部中央には中央脚部5を旋回させるために固定されたアクチュエータ4を介し、中央脚部5に接続されている。
この図1における中央脚部5については、図2を元に以下に詳述する。
まず股関節1に股関節アクチュエータ2が固定され、その隣には脚部末端の角度を股関節と一定にするためのリンク8が自由に可動する形で取り付けられている。
次に股関節アクチュエータ2を介し、腿部3が接続され、腿部3に固定された膝関節アクチュエータ4を介し、脛部5とリンク7が接続されるが、この時アクチュエータ4の出力軸で駆動されるのは脛部5のみであり、リンク7はアクチュエータ4の動力が伝わらずに同軸で自由に可動できるようにする。
そして脚部末端6に脛部5が、さらにその隣にはリンク9が接続され、リンク9のもう一方の端と、リンク8の股関節と接続されていない端、リンク7の膝関節と接続されていない端の部分が可動する形で接続される。
また脚部末端6の「足の裏」の部分は、この中央脚部で胴体を持ち上げた時に、支持脚が接地していない状態で胴体を前後左右に動かしても転倒しない程度の十分な前後左右の幅を必要とする。
次に、この実施形態を用いた移動動作の例を図3及び図4において示す。
図3の1及び図4の1は本実施形態における、中央脚部と支持脚がどちらも接地した状態である。
ここから腿部を直立させて図3の2の状態にすると胴体が持ち上がり支持脚が地面から離れると同時に胴体が前進し、これを正面図から見ると図4の2の状態になる。
そしてここから脛部を倒し図3の3の状態にすると胴体が下がると同時に、胴体がさらに前進して再び中央脚部と支持脚が両方とも接地した状態となり、これを正面図から見ると図4の3の状態になる。
さらに腿部を持ち上げて図3の4の状態にすると中央脚部が持ち上がり胴体は支持脚によって支持され、これを正面図から見ると図4の4の状態となる。
ここから脛部を下方向にまっすぐ伸びる位置に戻す事により図3の1及び図4の1に示した状態に戻り、上述の順に動作を繰り返すことで前進が、逆の順に繰り返すことで後退が出来る。
次に、この実施形態を用いた方向転換動作の例を図5に示す。
図5の1は本実施形態における、中央脚部と支持脚がどちらも接地した状態である。
ここから腿部を直立させて図5の2の状態にすると胴体が持ち上がり支持脚が地面から離れる。
次に腰部中央に設置された旋回用アクチュエータを用いて腰部及び支持脚の方向を転換させた状態が図5の3である。
そしてここから中央脚部の脛と腿を曲げて脚部を持ち上げ、支持脚のみで胴体を支えている状態が図5の4である。
この状態で中央脚部を進行方向に戻したものが図5の5であり、ここから図5の1に戻り中央脚部を再び接地させ、この動作を繰り返す事により方向転換動作を実現する。
図1における実施形態と運用法は以上であり、この方法で歩行による前進・後退・方向転換が実現できる。
【実施例】
【0009】
「実施形態の効果」
この実施形態によればリンク機構を用いて胴体と足の裏を平行に保てるため、足首の関節を駆動させるためのアクチュエータも省略でき、その結果として脚部に必要なアクチュエータは脚部の旋回・脚部を根元から持ち上げる股関節・膝関節の三つで歩行が実現可能であり、従来技術に比べてアクチュエータ・制御回路・制御ソフトウェアの製作や整備の負担が軽くなり、また重量の軽減・搭載量の増加にもつながる。
加えてこの実施形態であれば、同時に複数のアクチュエータを動かす必要が必ずしも無くなるため、また脚部の関節をどのような向きに移動させても転倒せずに立っていられるため、制御ソフトウェアでの姿勢制御プログラムの簡略化、必要な場合にはソフトウェアを介さない人間の手による手動制御での歩行が可能となり、さらにアクチュエータの動作に必ずしも俊敏さを求める必要がなくなるため、安価なアクチュエータを選び低コストを実現させることが出来、あるいはトルクの大きいアクチュエータを用いて更なる搭載量の増加を期待できる。
「他の実施形態」
本実施形態ではアクチュエータを関節部に取り付けて直接駆動しているが、別の実施形態では、モーターの配置を考慮してベルト、チェーン、リンク機構を用いて関節を駆動しても良い。
また本実施形態では傾斜のない整地での運用を前提にしたものであるが、斜面での運用を考慮し、アクチュエータの数を増やし腰部中央の足の裏と支持脚の足の裏の角度を変形させる機能、支持脚の左右の高さを変更する機能を加えて運用する事もできるが、ただしあくまでも移動と方向転換の動作は中央の脚部で行う事とする。
【図1】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−31380(P2011−31380A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−193641(P2009−193641)
【出願日】平成21年8月3日(2009.8.3)
【出願人】(509113575)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年8月3日(2009.8.3)
【出願人】(509113575)
【Fターム(参考)】
[ Back to top ]