
三輪車両
【課題】 転倒に対するタフネスが大きく、かつヨーイング不安定が発生し難い三輪車両を提供する。
【解決手段】 三輪車両の左右の後輪WRL,WRRのうちの右後輪WRRを左後輪WRLよりも車体後方側にずらすとともに、前輪WFの車幅方向位置を、車体の重心位置Gよりも右後輪WRR側にずらしたので、1個の前輪WFおよび左右の後輪WRL,WRRを左右対称に配置した従来の三輪車両に比べて、前輪WFと左右の後輪WRL,WRRとを結ぶ転倒判定ラインLL,LRの重心位置Gからの距離d1,d2を拡大して転倒に対するタフネスを高めることができる。しかも左右の後輪WRL,WRRを備えることで、左右の前輪および1個の後輪を左右対称に配置した従来の三輪車両に比べて、後輪WRL,WRRが支持し得る横力を充分に確保してヨーイング不安定が発生するのを防止することができる。
【解決手段】 三輪車両の左右の後輪WRL,WRRのうちの右後輪WRRを左後輪WRLよりも車体後方側にずらすとともに、前輪WFの車幅方向位置を、車体の重心位置Gよりも右後輪WRR側にずらしたので、1個の前輪WFおよび左右の後輪WRL,WRRを左右対称に配置した従来の三輪車両に比べて、前輪WFと左右の後輪WRL,WRRとを結ぶ転倒判定ラインLL,LRの重心位置Gからの距離d1,d2を拡大して転倒に対するタフネスを高めることができる。しかも左右の後輪WRL,WRRを備えることで、左右の前輪および1個の後輪を左右対称に配置した従来の三輪車両に比べて、後輪WRL,WRRが支持し得る横力を充分に確保してヨーイング不安定が発生するのを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、1個の前輪と左右の後輪とを備える三輪車両に関する。
【背景技術】
【0002】
1個の前輪と左右の後輪とを備える三輪車両は、例えばオート三輪車として従来より周知である。
【0003】
また操舵輪である左右の前輪と駆動輪である1個の後輪とを備える三輪車両が、下記特許文献1により公知である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−68808号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
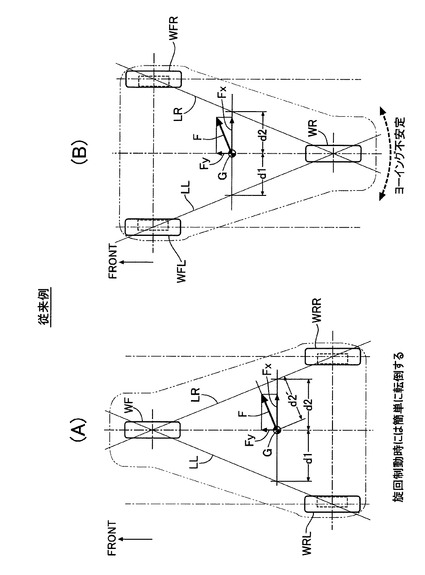
図8(A)に示すように、1個の前輪WFと左右の後輪WRL,WRRとを備える三輪車両は、前輪WFの接地点と左右の後輪WRL,WRRの接地点とを結ぶ2本の転倒判定ラインLL,LRを有しており、車体が左右に傾斜して重心位置Gが前記転倒判定ラインLL,LRを内側から外側に超えると転倒が発生する。三輪車両では、車体の重心位置Gと転倒判定ラインLL,LRとの距離が四輪車両に比べて小さいため、転倒が発生し易くなる。
【0006】
車両を転倒させる横力は、路面の傾斜以外に車両の旋回に伴う遠心力により発生する。例えば、車両が左旋回すると重心位置Gに右向きの遠心力Fxが作用し、車両を転倒させようとする。このとき、遠心力の方向に測った重心位置Gと右側の転倒判定ラインLRとの距離d2は比較的に大きいため、車両は簡単に転倒することはない。しかしながら、車両が旋回しながら制動して車体前向きの慣性力Fyが同時に作用すると、その合力Fの方向に測った重心位置Gと右側の転倒判定ラインLRとの距離d2′は前記距離d2よりも小さくなり、制動を行わない場合に比べて車両は転倒し易くなる。
【0007】
このように、1個の前輪WFと左右の後輪WRL,WRRとを備える三輪車両は、旋回中に制動を行うと転倒が発生し易くなる問題がある。
【0008】
それに対し、図8(B)に示すように、左右の前輪WFL,WFRと1個の後輪WRとを備える三輪車両は、左右の前輪WFL,WFRの接地点と後輪WRの接地点とを結ぶ2本の転倒判定ラインLL,LRの傾斜方向が、1個の前輪WFと左右の後輪WRL,WRRとを備える図8(A)の三輪車両と逆になるため、車両が旋回しながら制動して車体前向きの慣性力Fyが横力Fxと同時に作用すると、その慣性力Fyと横力Fxとの合力Fの方向に測った重心位置Gと右側の転倒判定ラインLLとの距離が増加するため、車両は転倒し難くなる。
【0009】
しかしながら、左右の前輪WFL,WFRと1個の後輪WRとを備える三輪車両は、後輪WRの接地荷重が小さい場合には、後輪WRが支持し得る横力が不足して車両のヨーイング不安定が発生する可能性がある。
【0010】
本発明は前述の事情に鑑みてなされたもので、転倒に対するタフネスが大きく、かつヨーイング不安定が発生し難い三輪車両を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載された発明によれば、1個の前輪と左右の後輪とを備える三輪車両において、前記左右の後輪のうちの一方の後輪を他方の後輪よりも車体後方側にずらすとともに、前記前輪の車幅方向位置を、車体の重心位置よりも前記一方の後輪側にずらしたことを特徴とする三輪車両が提案される。
【0012】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記左右の後輪は駆動輪であり、直進走行時に前記一方の後輪の駆動力を前記他方の後輪の駆動力よりも大きくすることを特徴とする三輪車両が提案される。
【0013】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、制動時に前記一方の後輪の制動力を前記他方の後輪の制動力よりも小さくすることを特徴とする三輪車両が提案される。
【0014】
また請求項4に記載された発明によれば、請求項1〜請求項3の何れか1項の構成に加えて、前記1個の前輪および前記左右の後輪の三輪のうち、少なくとも二輪が転舵可能であることを特徴とする三輪車両が提案される。
【0015】
また請求項5に記載された発明によれば、請求項4の構成に加えて、三輪のうちの二輪が転舵可能であり、転舵不能な一輪を基準として転舵可能な二輪のアッカーマンジオメトリを設定したことを特徴とする三輪車両が提案される。
【発明の効果】
【0016】
請求項1の構成によれば、三輪車両の左右の後輪のうちの一方の後輪を他方の後輪よりも車体後方側にずらすとともに、前輪の車幅方向位置を、車体の重心位置よりも一方の後輪側にずらしたので、1個の前輪および左右の後輪を左右対称に配置した従来の三輪車両に比べて、前輪と左右の後輪とを結ぶ転倒判定ラインの重心位置からの距離を増加させて転倒に対するタフネスを高めることができる。しかも左右の後輪を備えることで、左右の前輪および1個の後輪を左右対称に配置した従来の三輪車両に比べて、後輪が支持し得る横力を充分に確保してヨーイング不安定が発生するのを防止することができる。
【0017】
また請求項2の構成によれば、直進走行時に駆動輪である左右の後輪のうちの一方の後輪の駆動力を他方の後輪の駆動力よりも大きくするので、左右非対称に配置された前輪の転がり抵抗によって重心位置まわりに左右一方へ回頭しようとするヨーモーメントが発生しても、そのヨーモーメントを打ち消して車両を直進させることができる。
【0018】
また請求項3の構成によれば、制動時に一方の後輪の制動力を他方の後輪の制動力よりも小さくするので、左右非対称に配置された三輪の制動力によって重心位置まわりに左右一方へ回頭しようとするヨーモーメントが発生しても、そのヨーモーメントを打ち消して車両を直進させることができる。
【0019】
また請求項4の構成によれば、1個の前輪および左右の後輪の三輪のうち、少なくとも二輪が転舵可能であるので、一輪だけを転舵する場合に比べて旋回性能が向上する。
【0020】
また請求項5の構成によれば、三輪のうちの二輪が転舵可能であり、転舵不能な一輪を基準として転舵可能な二輪のアッカーマンジオメトリを設定したので、三輪の何れもがスリップしないスムーズな旋回が可能となる。
【図面の簡単な説明】
【0021】
【図1】三輪車両の平面図(第1の実施の形態)。
【図2】直進定速・加速走行時の作用説明図(第1の実施の形態)。
【図3】直進制動走行時の作用説明図(第1の実施の形態)。
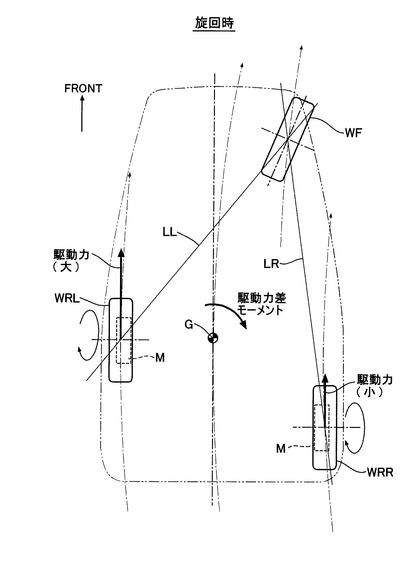
【図4】旋回時の作用説明図(第1の実施の形態)。
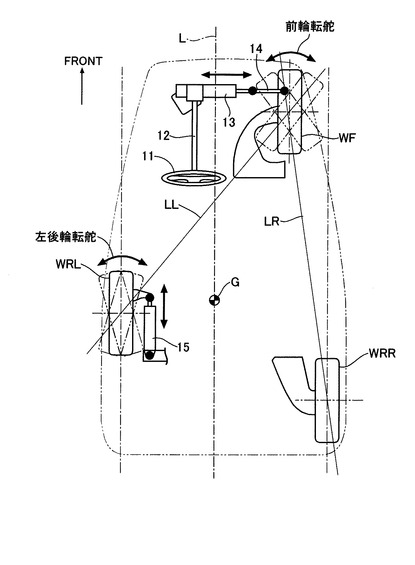
【図5】三輪車両の平面図(第2の実施の形態)。
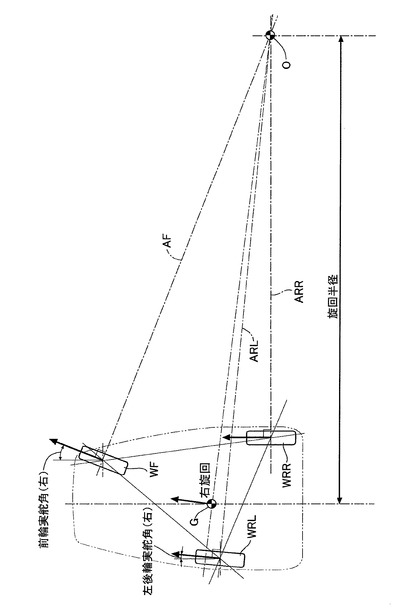
【図6】右旋回時の作用説明図(第2の実施の形態)。
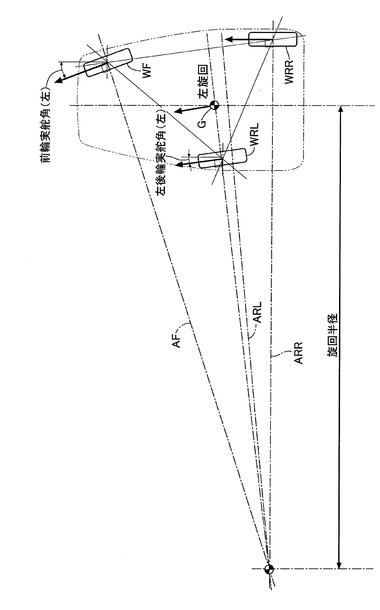
【図7】左旋回時の作用説明図(第2の実施の形態)。
【図8】従来の三輪車両を示す図(従来例)。
【発明を実施するための形態】
【0022】
以下、図1〜図4に基づいて本発明の第1の実施の形態を説明する。
【0023】
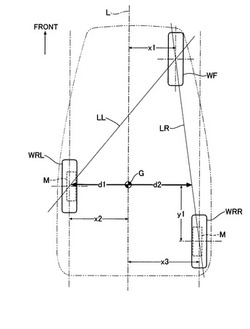
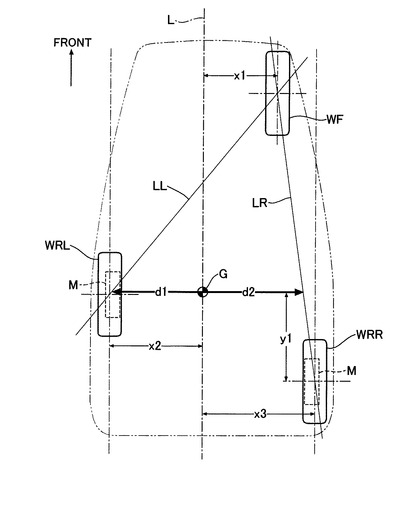
図1に示すように、三輪車両は非駆動輪であって転舵輪である1個の前輪WFと、駆動輪であって非転舵輪である左右の後輪WRL,WRRとを備える。車体の重心位置Gを通って前後方向に延びる基準線Lに対して、前輪WFは距離x1だけ右側にずれている。左後輪WRLは基準線Lに対して左側に距離x2だけずれており、また右後輪WRRは基準線Lに対して右側に距離x3だけずれている。距離x1,x2,x3の大小関係は、x1<x2<x3である。
【0024】
左後輪WRLの前後方向位置は重心位置Gの前後方向位置に略一致しており、かつ右後輪WRRの前後方向位置は重心位置Gの前後方向位置よりも距離y1だけ後方にずれている。左右の後輪WRL,WRRはインホイールモータM,Mにより独立に駆動可能である。
【0025】
前輪WFおよび左後輪WRLの接地点を結ぶ転倒判定ラインLLと、前輪WFおよび右後輪WRRの接地点を結ぶ転倒判定ラインLRとを引いたとき、上述した前輪WFおよび後輪WRL,WRRの非対称配置により、重心位置Gと左側の転倒判定ラインLLとの距離d1と、重心位置Gと右側の転倒判定ラインLRとの距離d2とは、図8(A),(B)に示す従来の三輪車両に比べて大きくなる。
【0026】
よって、三輪車両が旋回して車体左右方向の遠心力が作用しても、また旋回中に制動が行われても、重心位置Gが転倒判定ラインLL,LRを内側から外側に超え難くなって転倒が効果的に防止される。
【0027】
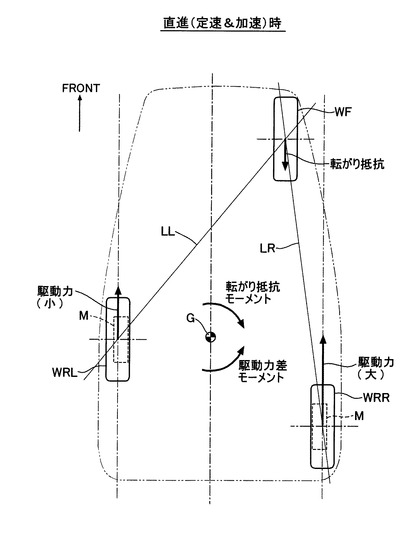
図2に示すように、前輪WFは重心位置Gを通る基準線Lの右側に配置されるため、前輪WFの転がり抵抗によって車両を右旋回させようとするヨーモーメントが発生し、車両の直進走行が阻害される問題がある。そこで左右のインホイールモータM,Mの駆動力を個別に制御し、右後輪WRRのインホイールモータMの駆動力を左後輪WRLのインホイールモータMの駆動力よりも大きくすることで、車両を左旋回させようとするヨーモーメントを発生させ、両ヨーモーメントを相殺して三輪車両の直進走行を可能にすることができる。
【0028】
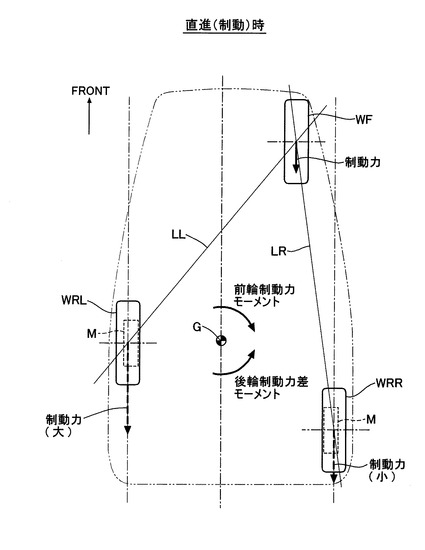
図3に示すように、重心位置Gを通る基準線Lの右側には前輪WFおよび右後輪WRRの二輪が配置され、左側には左後輪WRLの一輪が配置されるため、車体右側の前輪WFおよび右後輪WRRの制動力の和は車体左側の左後輪WRLの制動力よりも大きくなり、車両を右旋回させようとするヨーモーメントが発生して車両の直進走行が阻害される問題がある。そこで左右の後輪WRL,WRRの制動力を個別に制御し、右後輪WRRの制動力を左後輪WRLの制動力よりも小さくすることで、車両を左旋回させようとするヨーモーメントを発生させ、両ヨーモーメントを相殺して三輪車両の直進走行を可能にすることができる。
【0029】
図4に示すように、例えば前輪WFを右に転舵して三輪車両を右旋回させるとき、左後輪WRLの駆動力を右後輪WRRの駆動力よりも大きく設定することで、右旋回方向のヨーモーメントを発生させて旋回を補助することができる。逆に、前輪WFを左に転舵して三輪車両を左旋回させるとき、右後輪WRRの駆動力を左後輪WRLの駆動力よりも大きく設定することで、左旋回方向のヨーモーメントを発生させて旋回を補助することができる。
【0030】
次に、図5〜図7に基づいて本発明の第2の実施の形態を説明する。
【0031】
図5に示すように、第2の実施の形態では、前輪WF、左後輪WRLおよび右後輪WRRの三輪のうち、前輪WFおよび左後輪WRLが転舵輪となり、右後輪WRRが非転舵輪となる。前輪WFはステアリングホイール11により、ステアリングシャフト12、ステアリングギヤボックス13およびタイロッド14を介して転舵される。また左後輪WRLは、ステアリングホイール11の操舵角を操舵角センサで検出し、その操舵角に基づいて作動する転舵アクチュエータ15により直接転舵される。
【0032】
この三輪車両は前輪WF、左後輪WRLおよび右後輪WRRが左右非対称に配置されているため、前輪WFの左転舵角および右転舵角は、同じ旋回半径の右旋回および左旋回について異なる大きさになり、左後輪WRLの左転舵角および右転舵角も、同じ旋回半径の右旋回および左旋回について異なる大きさになる。
【0033】
図6および図7は、それぞれ右旋回時および左旋回時の転舵状態を示すもので、非転舵輪である右後輪WRRを基準として転舵輪である前輪WFおよび左後輪WRLのアッカーマンジオメトリが設定される。アッカーマンジオメトリとは、全ての車輪が横滑りせずに旋回可能となる各車輪の転舵角の関係である。本実施の形態では、非転舵輪である右後輪WRRの車軸の軸線ARRに、転舵輪である前輪WFの車軸の軸線AFと転舵輪である左後輪WRLの車軸の軸線ARLとが一つの交点Oで交差するように、前輪WFおよび左後輪WRLの転舵角を設定することで、アッカーマンジオメトリを達成することが可能となる。
【0034】
このように、第2の実施の形態によれば、三輪のうちの二輪を転舵輪とすることで、一輪だけを転舵輪とする場合に比べて旋回性能を高めることができ、その際に、一つの非転舵輪を基準として二つの転舵二輪のアッカーマンジオメトリを設定することで、一層スムーズな旋回を可能にすることができる。
【0035】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0036】
例えば、1個の前輪WFおよび左右の後輪WRL,WRRの配置は実施の形態に限定されず、左右を入れ換えたものであっても良い。
【0037】
また三輪車両の走行用駆動源はインホイールモータM,Mに限定されず、任意の位置に配置された電動モータやエンジンであっても良い。
【0038】
また第2の実施の形態では、右後輪WRRを非転舵輪としているが、前輪WFあるいは左後輪WRLを非転舵輪とすることも可能である。もちろん、三輪の全てを転舵輪としても良い。
【符号の説明】
【0039】
WF 前輪
WRL 左後輪(他方の後輪)
WRR 右後輪(一方の後輪)
G 重心位置
【技術分野】
【0001】
本発明は、1個の前輪と左右の後輪とを備える三輪車両に関する。
【背景技術】
【0002】
1個の前輪と左右の後輪とを備える三輪車両は、例えばオート三輪車として従来より周知である。
【0003】
また操舵輪である左右の前輪と駆動輪である1個の後輪とを備える三輪車両が、下記特許文献1により公知である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−68808号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
図8(A)に示すように、1個の前輪WFと左右の後輪WRL,WRRとを備える三輪車両は、前輪WFの接地点と左右の後輪WRL,WRRの接地点とを結ぶ2本の転倒判定ラインLL,LRを有しており、車体が左右に傾斜して重心位置Gが前記転倒判定ラインLL,LRを内側から外側に超えると転倒が発生する。三輪車両では、車体の重心位置Gと転倒判定ラインLL,LRとの距離が四輪車両に比べて小さいため、転倒が発生し易くなる。
【0006】
車両を転倒させる横力は、路面の傾斜以外に車両の旋回に伴う遠心力により発生する。例えば、車両が左旋回すると重心位置Gに右向きの遠心力Fxが作用し、車両を転倒させようとする。このとき、遠心力の方向に測った重心位置Gと右側の転倒判定ラインLRとの距離d2は比較的に大きいため、車両は簡単に転倒することはない。しかしながら、車両が旋回しながら制動して車体前向きの慣性力Fyが同時に作用すると、その合力Fの方向に測った重心位置Gと右側の転倒判定ラインLRとの距離d2′は前記距離d2よりも小さくなり、制動を行わない場合に比べて車両は転倒し易くなる。
【0007】
このように、1個の前輪WFと左右の後輪WRL,WRRとを備える三輪車両は、旋回中に制動を行うと転倒が発生し易くなる問題がある。
【0008】
それに対し、図8(B)に示すように、左右の前輪WFL,WFRと1個の後輪WRとを備える三輪車両は、左右の前輪WFL,WFRの接地点と後輪WRの接地点とを結ぶ2本の転倒判定ラインLL,LRの傾斜方向が、1個の前輪WFと左右の後輪WRL,WRRとを備える図8(A)の三輪車両と逆になるため、車両が旋回しながら制動して車体前向きの慣性力Fyが横力Fxと同時に作用すると、その慣性力Fyと横力Fxとの合力Fの方向に測った重心位置Gと右側の転倒判定ラインLLとの距離が増加するため、車両は転倒し難くなる。
【0009】
しかしながら、左右の前輪WFL,WFRと1個の後輪WRとを備える三輪車両は、後輪WRの接地荷重が小さい場合には、後輪WRが支持し得る横力が不足して車両のヨーイング不安定が発生する可能性がある。
【0010】
本発明は前述の事情に鑑みてなされたもので、転倒に対するタフネスが大きく、かつヨーイング不安定が発生し難い三輪車両を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために、請求項1に記載された発明によれば、1個の前輪と左右の後輪とを備える三輪車両において、前記左右の後輪のうちの一方の後輪を他方の後輪よりも車体後方側にずらすとともに、前記前輪の車幅方向位置を、車体の重心位置よりも前記一方の後輪側にずらしたことを特徴とする三輪車両が提案される。
【0012】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記左右の後輪は駆動輪であり、直進走行時に前記一方の後輪の駆動力を前記他方の後輪の駆動力よりも大きくすることを特徴とする三輪車両が提案される。
【0013】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、制動時に前記一方の後輪の制動力を前記他方の後輪の制動力よりも小さくすることを特徴とする三輪車両が提案される。
【0014】
また請求項4に記載された発明によれば、請求項1〜請求項3の何れか1項の構成に加えて、前記1個の前輪および前記左右の後輪の三輪のうち、少なくとも二輪が転舵可能であることを特徴とする三輪車両が提案される。
【0015】
また請求項5に記載された発明によれば、請求項4の構成に加えて、三輪のうちの二輪が転舵可能であり、転舵不能な一輪を基準として転舵可能な二輪のアッカーマンジオメトリを設定したことを特徴とする三輪車両が提案される。
【発明の効果】
【0016】
請求項1の構成によれば、三輪車両の左右の後輪のうちの一方の後輪を他方の後輪よりも車体後方側にずらすとともに、前輪の車幅方向位置を、車体の重心位置よりも一方の後輪側にずらしたので、1個の前輪および左右の後輪を左右対称に配置した従来の三輪車両に比べて、前輪と左右の後輪とを結ぶ転倒判定ラインの重心位置からの距離を増加させて転倒に対するタフネスを高めることができる。しかも左右の後輪を備えることで、左右の前輪および1個の後輪を左右対称に配置した従来の三輪車両に比べて、後輪が支持し得る横力を充分に確保してヨーイング不安定が発生するのを防止することができる。
【0017】
また請求項2の構成によれば、直進走行時に駆動輪である左右の後輪のうちの一方の後輪の駆動力を他方の後輪の駆動力よりも大きくするので、左右非対称に配置された前輪の転がり抵抗によって重心位置まわりに左右一方へ回頭しようとするヨーモーメントが発生しても、そのヨーモーメントを打ち消して車両を直進させることができる。
【0018】
また請求項3の構成によれば、制動時に一方の後輪の制動力を他方の後輪の制動力よりも小さくするので、左右非対称に配置された三輪の制動力によって重心位置まわりに左右一方へ回頭しようとするヨーモーメントが発生しても、そのヨーモーメントを打ち消して車両を直進させることができる。
【0019】
また請求項4の構成によれば、1個の前輪および左右の後輪の三輪のうち、少なくとも二輪が転舵可能であるので、一輪だけを転舵する場合に比べて旋回性能が向上する。
【0020】
また請求項5の構成によれば、三輪のうちの二輪が転舵可能であり、転舵不能な一輪を基準として転舵可能な二輪のアッカーマンジオメトリを設定したので、三輪の何れもがスリップしないスムーズな旋回が可能となる。
【図面の簡単な説明】
【0021】
【図1】三輪車両の平面図(第1の実施の形態)。
【図2】直進定速・加速走行時の作用説明図(第1の実施の形態)。
【図3】直進制動走行時の作用説明図(第1の実施の形態)。
【図4】旋回時の作用説明図(第1の実施の形態)。
【図5】三輪車両の平面図(第2の実施の形態)。
【図6】右旋回時の作用説明図(第2の実施の形態)。
【図7】左旋回時の作用説明図(第2の実施の形態)。
【図8】従来の三輪車両を示す図(従来例)。
【発明を実施するための形態】
【0022】
以下、図1〜図4に基づいて本発明の第1の実施の形態を説明する。
【0023】
図1に示すように、三輪車両は非駆動輪であって転舵輪である1個の前輪WFと、駆動輪であって非転舵輪である左右の後輪WRL,WRRとを備える。車体の重心位置Gを通って前後方向に延びる基準線Lに対して、前輪WFは距離x1だけ右側にずれている。左後輪WRLは基準線Lに対して左側に距離x2だけずれており、また右後輪WRRは基準線Lに対して右側に距離x3だけずれている。距離x1,x2,x3の大小関係は、x1<x2<x3である。
【0024】
左後輪WRLの前後方向位置は重心位置Gの前後方向位置に略一致しており、かつ右後輪WRRの前後方向位置は重心位置Gの前後方向位置よりも距離y1だけ後方にずれている。左右の後輪WRL,WRRはインホイールモータM,Mにより独立に駆動可能である。
【0025】
前輪WFおよび左後輪WRLの接地点を結ぶ転倒判定ラインLLと、前輪WFおよび右後輪WRRの接地点を結ぶ転倒判定ラインLRとを引いたとき、上述した前輪WFおよび後輪WRL,WRRの非対称配置により、重心位置Gと左側の転倒判定ラインLLとの距離d1と、重心位置Gと右側の転倒判定ラインLRとの距離d2とは、図8(A),(B)に示す従来の三輪車両に比べて大きくなる。
【0026】
よって、三輪車両が旋回して車体左右方向の遠心力が作用しても、また旋回中に制動が行われても、重心位置Gが転倒判定ラインLL,LRを内側から外側に超え難くなって転倒が効果的に防止される。
【0027】
図2に示すように、前輪WFは重心位置Gを通る基準線Lの右側に配置されるため、前輪WFの転がり抵抗によって車両を右旋回させようとするヨーモーメントが発生し、車両の直進走行が阻害される問題がある。そこで左右のインホイールモータM,Mの駆動力を個別に制御し、右後輪WRRのインホイールモータMの駆動力を左後輪WRLのインホイールモータMの駆動力よりも大きくすることで、車両を左旋回させようとするヨーモーメントを発生させ、両ヨーモーメントを相殺して三輪車両の直進走行を可能にすることができる。
【0028】
図3に示すように、重心位置Gを通る基準線Lの右側には前輪WFおよび右後輪WRRの二輪が配置され、左側には左後輪WRLの一輪が配置されるため、車体右側の前輪WFおよび右後輪WRRの制動力の和は車体左側の左後輪WRLの制動力よりも大きくなり、車両を右旋回させようとするヨーモーメントが発生して車両の直進走行が阻害される問題がある。そこで左右の後輪WRL,WRRの制動力を個別に制御し、右後輪WRRの制動力を左後輪WRLの制動力よりも小さくすることで、車両を左旋回させようとするヨーモーメントを発生させ、両ヨーモーメントを相殺して三輪車両の直進走行を可能にすることができる。
【0029】
図4に示すように、例えば前輪WFを右に転舵して三輪車両を右旋回させるとき、左後輪WRLの駆動力を右後輪WRRの駆動力よりも大きく設定することで、右旋回方向のヨーモーメントを発生させて旋回を補助することができる。逆に、前輪WFを左に転舵して三輪車両を左旋回させるとき、右後輪WRRの駆動力を左後輪WRLの駆動力よりも大きく設定することで、左旋回方向のヨーモーメントを発生させて旋回を補助することができる。
【0030】
次に、図5〜図7に基づいて本発明の第2の実施の形態を説明する。
【0031】
図5に示すように、第2の実施の形態では、前輪WF、左後輪WRLおよび右後輪WRRの三輪のうち、前輪WFおよび左後輪WRLが転舵輪となり、右後輪WRRが非転舵輪となる。前輪WFはステアリングホイール11により、ステアリングシャフト12、ステアリングギヤボックス13およびタイロッド14を介して転舵される。また左後輪WRLは、ステアリングホイール11の操舵角を操舵角センサで検出し、その操舵角に基づいて作動する転舵アクチュエータ15により直接転舵される。
【0032】
この三輪車両は前輪WF、左後輪WRLおよび右後輪WRRが左右非対称に配置されているため、前輪WFの左転舵角および右転舵角は、同じ旋回半径の右旋回および左旋回について異なる大きさになり、左後輪WRLの左転舵角および右転舵角も、同じ旋回半径の右旋回および左旋回について異なる大きさになる。
【0033】
図6および図7は、それぞれ右旋回時および左旋回時の転舵状態を示すもので、非転舵輪である右後輪WRRを基準として転舵輪である前輪WFおよび左後輪WRLのアッカーマンジオメトリが設定される。アッカーマンジオメトリとは、全ての車輪が横滑りせずに旋回可能となる各車輪の転舵角の関係である。本実施の形態では、非転舵輪である右後輪WRRの車軸の軸線ARRに、転舵輪である前輪WFの車軸の軸線AFと転舵輪である左後輪WRLの車軸の軸線ARLとが一つの交点Oで交差するように、前輪WFおよび左後輪WRLの転舵角を設定することで、アッカーマンジオメトリを達成することが可能となる。
【0034】
このように、第2の実施の形態によれば、三輪のうちの二輪を転舵輪とすることで、一輪だけを転舵輪とする場合に比べて旋回性能を高めることができ、その際に、一つの非転舵輪を基準として二つの転舵二輪のアッカーマンジオメトリを設定することで、一層スムーズな旋回を可能にすることができる。
【0035】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0036】
例えば、1個の前輪WFおよび左右の後輪WRL,WRRの配置は実施の形態に限定されず、左右を入れ換えたものであっても良い。
【0037】
また三輪車両の走行用駆動源はインホイールモータM,Mに限定されず、任意の位置に配置された電動モータやエンジンであっても良い。
【0038】
また第2の実施の形態では、右後輪WRRを非転舵輪としているが、前輪WFあるいは左後輪WRLを非転舵輪とすることも可能である。もちろん、三輪の全てを転舵輪としても良い。
【符号の説明】
【0039】
WF 前輪
WRL 左後輪(他方の後輪)
WRR 右後輪(一方の後輪)
G 重心位置
【特許請求の範囲】
【請求項1】
1個の前輪(WF)と左右の後輪(WRL,WRR)とを備える三輪車両において、
前記左右の後輪(WRL,WRR)のうちの一方の後輪(WRR)を他方の後輪(WRL)よりも車体後方側にずらすとともに、前記前輪(WF)の車幅方向位置を、車体の重心位置(G)よりも前記一方の後輪(WRR)側にずらしたことを特徴とする三輪車両。
【請求項2】
前記左右の後輪(WRL,WRR)は駆動輪であり、直進走行時に前記一方の後輪(WRR)の駆動力を前記他方の後輪(WRL)の駆動力よりも大きくすることを特徴とする、請求項1に記載の三輪車両。
【請求項3】
制動時に前記一方の後輪(WRR)の制動力を前記他方の後輪(WRL)の制動力よりも小さくすることを特徴とする、請求項1または請求項2に記載の三輪車両。
【請求項4】
前記1個の前輪(WF)および前記左右の後輪(WRL,WRR)の三輪(WF,WRL,WRR)のうち、少なくとも二輪(WF,WRL)が転舵可能であることを特徴とする、請求項1または請求項2に記載の三輪車両。
【請求項5】
三輪(WF,WRL,WRR)のうちの二輪(WF,WRL)が転舵可能であり、転舵不能な一輪(WRR)を基準として転舵可能な二輪(WF,WRL)のアッカーマンジオメトリを設定したことを特徴とする、請求項4に記載の三輪車両。
【請求項1】
1個の前輪(WF)と左右の後輪(WRL,WRR)とを備える三輪車両において、
前記左右の後輪(WRL,WRR)のうちの一方の後輪(WRR)を他方の後輪(WRL)よりも車体後方側にずらすとともに、前記前輪(WF)の車幅方向位置を、車体の重心位置(G)よりも前記一方の後輪(WRR)側にずらしたことを特徴とする三輪車両。
【請求項2】
前記左右の後輪(WRL,WRR)は駆動輪であり、直進走行時に前記一方の後輪(WRR)の駆動力を前記他方の後輪(WRL)の駆動力よりも大きくすることを特徴とする、請求項1に記載の三輪車両。
【請求項3】
制動時に前記一方の後輪(WRR)の制動力を前記他方の後輪(WRL)の制動力よりも小さくすることを特徴とする、請求項1または請求項2に記載の三輪車両。
【請求項4】
前記1個の前輪(WF)および前記左右の後輪(WRL,WRR)の三輪(WF,WRL,WRR)のうち、少なくとも二輪(WF,WRL)が転舵可能であることを特徴とする、請求項1または請求項2に記載の三輪車両。
【請求項5】
三輪(WF,WRL,WRR)のうちの二輪(WF,WRL)が転舵可能であり、転舵不能な一輪(WRR)を基準として転舵可能な二輪(WF,WRL)のアッカーマンジオメトリを設定したことを特徴とする、請求項4に記載の三輪車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−208614(P2010−208614A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−241091(P2009−241091)
【出願日】平成21年10月20日(2009.10.20)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年10月20日(2009.10.20)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]