
下肢筋力評価方法、及びこれに用いる下肢筋力評価装置
【課題】 利便性が良好でかつ下肢筋力を精度良く評価することができる下肢筋力評価方法、及びこれに用いる下肢筋力評価装置を提供する。
【解決手段】 本発明の下肢筋力評価方法は、被検者Hが可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、被検者Hの上半身部及び大腿部の動きを示す加速度及び角速度を上半身部センサ及び大腿部センサによって取得するステップと、取得した上半身部及び大腿部の加速度及び角速度から、被検者Hの股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、前記最大値と、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値Trefhip+kneeとに基づいて下肢筋力の余裕度を算出するステップとを備えている。
【解決手段】 本発明の下肢筋力評価方法は、被検者Hが可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、被検者Hの上半身部及び大腿部の動きを示す加速度及び角速度を上半身部センサ及び大腿部センサによって取得するステップと、取得した上半身部及び大腿部の加速度及び角速度から、被検者Hの股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、前記最大値と、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値Trefhip+kneeとに基づいて下肢筋力の余裕度を算出するステップとを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検者の下肢筋力を評価するための方法、及びこれに用いる筋力評価装置に関する。
【背景技術】
【0002】
下肢筋力は、歩行移動や、立ち動作、座り動作等、日常生活を送る上で非常に重要であり、高齢化が進む中、この下肢筋力を日常的に測定し評価する必要性が高まっている。
下肢筋力を測定する方法としては、動力計(ダイナモメータ)等を用いて膝関節や股関節の伸展、屈曲時の筋力を直接測定する方法(方法1)や、日常生活動作に基づいた評価値を測定する方法(方法2)がある。
【0003】
方法2には、例えば、普通の椅子を用いて立ち座りを所定回数繰り返し行い、それに要する時間を計測して下肢筋力を評価する方法(椅子座り立ちテスト)や、被検者がしゃがみ姿勢から立ち姿勢に移行する際の当該被検者の足下荷重の変化を測定し、この荷重変化に基づいて下肢筋力を評価する方法などがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−92979号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記方法1では、動力計を備え、被検者の各部の筋力を直接測定することが可能な測定装置を用いて行うので、客観的な測定値が精度良く得られる。しかし、測定装置が、大がかりでかつ高価であるため、通常、研究機関や専門機関に設置されることが多い。このため、日常的に測定が行えるほど利便性が良好であるとは言えない。
【0006】
上記方法2では、大がかりな装置は必要なく、利便性の面で優れている。しかし、上記椅子座り立ちテストでは、高齢のために普通の椅子を用いての立ち座りができない場合は、テストそのものを実施することができない。
また、しゃがみ姿勢から立ち姿勢に移行する際の当該被検者の足下荷重の変化に基づいた下肢筋力の評価方法では、足下荷重の変化に姿勢の要因も含まれてしまうので、筋力が低く十分なしゃがみ姿勢がとれない場合や、しゃがみ姿勢が人によってまちまちである場合には、精度良く測定できないおそれがある。さらに、上記方法2では、得られる測定結果が立ち座りの動作を行うに当たって十分な筋力であるのかどうか、といった明確な評価を行うことが困難であるという問題も有している。
【0007】
本発明はこのような事情に鑑みてなされたものであり、利便性が良好でかつ下肢筋力を精度良く評価することができる下肢筋力評価方法、及びこれに用いる下肢筋力評価装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、被検者の下肢筋力を評価するための下肢筋力評価方法であって、前記被検者の動きを示すパラメータ値を取得するためのセンサを設置するセンサ設置ステップと、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値を前記センサによって取得するパラメータ値取得ステップと、取得した前記大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する算出ステップと、を含むことを特徴としている。
【0009】
上記のように構成された下肢筋力評価方法によれば、被検者が可能な限りしゃがんだ最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における大腿部のパラメータ値から股関節及び膝関節の関節モーメントの和の最大値を求め、この最大値と、起立するために必要な必要最小筋力を示す基準値とを用いて余裕度を算出するので、精度良く評価を行うことができる。
また、前記最大値に基づいて下肢筋力の余裕度を算出するので、余裕度を、被検者の最大しゃがみ姿勢の影響を含んだ値として得ることができる。このため、被検者ごとの筋力の相違によって最大しゃがみ姿勢に相違があったとしても、その最大しゃがみ姿勢の相違も含めた下肢筋力の余裕度として評価を行うことができる。
また、本発明によれば、慣性センサ等といった、被検者の動きを示すパラメータ値を取得することができるセンサを設置すれば、下肢筋力の余裕度を求めることができるので、下肢筋力の評価を利便性良く行うことができる。
【0010】
(2)前記パラメータ値取得ステップでは、起立姿勢の前記被検者が、前記最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における前記大腿部のパラメータ値を取得するものであることが好ましい。
この場合、起立姿勢から最大しゃがみ姿勢に姿勢変化するときの被検者の股関節及び膝関節の関節モーメントの和の相対変化を把握することができ、当該被検者の起立姿勢を基準とした最大しゃがみ姿勢の状態を把握することができる。
【0011】
(3)また、前記算出ステップにおいて、下記式に基づいて、前記下肢筋力の余裕度を求めるものであることが好ましい。
【0012】
【数1】

【0013】
上記式中、Muscle_marginは、下肢筋力の余裕度、Thip+knee(t)は、股関節と膝関節の関節モーメントの和、max(Thip+knee(t))は、被検者がしゃがみ姿勢から起立姿勢に姿勢変化する間における股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。
【0014】
(4)さらに、前記算出ステップにおいて、下記式に基づいて、前記基準値Trefhip+kneeを、求めることが好ましい。
【0015】
【数2】
【0016】
上記式中、LThighは、大腿部の長手方向の長さ、kThighは、大腿部の長手方向における質量中心位置を示すパラメータ、BalRLは、床反力における左右バランスを示すパラメータ、mBodyは、被検者の全質量、mHATは、上半身部の質量、mThighは、大腿部セグメントの質量、gは、重力加速度である。
【0017】
上記式中、右辺より得られる値は、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeであり、被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す値である基準値Trefhip+kneeと一致する。
基準値Trefhip+kneeは、上記式から得られることで、時間に応じて変化しない定数として得ることができる。
【0018】
(5)上記下肢筋力評価方法において、前記センサは、前記大腿部のパラメータ値を取得するための大腿部センサを含み、前記センサ設置ステップにおいて、前記大腿部センサを前記被検者に固定するものであることが好ましい。
この場合、大腿部センサを被検者に固定するといった簡単な作業で、大腿部のパラメータ値を取得することができ、より利便性を高めることができる。
【0019】
(6)(7)大腿部の質量中心の長手方向の位置は、最も太い部分の近傍に位置している。このため、前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の最も太い部分に固定されることが好ましい。
さらに、前記大腿部センサは、前記大腿部の外側面に固定されることが好ましい。一般に大腿部の外側面は、脂肪等が薄く、被検者ごとに安定した位置に固定することができるからである。
【0020】
また例えば、大腿部を一つのセグメントとして捉え、このセグメントの質量中心における動きを大腿部の動きとして求める場合、大腿部センサがそのセンサ位置で検知する大腿部のパラメータ値は、前記質量中心における値に補正する必要がある。
これに対して、上記の場合、大腿部センサを、大腿部の質量中心の近傍に固定できるとともに、被検者ごとに安定した位置に固定することができるので、上記補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0021】
(8)(9)前記センサは、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得するための上半身部センサを含み、前記センサ設置ステップにおいて、前記上半身部センサを前記被検者に固定し、前記算出ステップにおいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求めることもでき、さらに、前記上半身部センサは、前記上半身部において、背中側の腰部の最も前弯した部分に固定することが好ましい。
【0022】
この場合、股関節及び膝関節の関節モーメントの和の最大値を、大腿部のパラメータ値と前記上半身部のパラメータ値とに基づいて求めることで、より精度よく評価を行うことができる。
また、一般に、背中側は、脂肪等が薄く、上半身部センサを被検者の背中側に固定することで、被検者ごとに安定した位置に固定することができる。
さらに、上半身部をセグメントとして捉えたときの質量中心は、腰部の最も前弯した部分の近傍に存在している。よって、上半身部の質量中心に近い位置に上半身部センサを固定すれば、上半身部センサによる上半身部パラメータ値を上半身部の質量中心における値に補正する場合においても、その補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0023】
(10)また、前記被検者の身長を入力するステップをさらに備え、前記算出ステップにおいて、前記身長に基づいて、前記大腿部の長手方向の長さ、質量中心位置を示すパラメータ、前記被検者の全質量、上半身部の質量、及び大腿部の質量を推定してもよい。
この場合、下肢筋力の余裕度を求めるのに必要な定数を全て用意せずとも、文献等のデータや、その他の統計的なデータを用いれば、被検者の身長に応じて前記定数を推定することができ、評価精度を低下させることなく利便性を高めることができる。
【0024】
(11)また、本発明は、被検者の下肢筋力を評価するための下肢筋力評価装置であって、前記被検者の動きを示すパラメータ値を取得するためのセンサと、前記センサが取得した、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する演算部と、を備えていることを特徴としている。
【0025】
上記のように構成された下肢筋力評価装置によれば、上述したように、利便性が良好でかつ下肢筋力を精度良く評価することができる。
【0026】
(12)(13)前記センサは、前記大腿部に装着される装具に固定され、前記大腿部のパラメータ値を取得する大腿部センサを含んでいてもよい。
さらに、前記センサは、前記被検者の上半身部に装着される装具に固定され、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得する上半身部センサを含み、前記演算部が、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求めるものであってもよい。
【発明の効果】
【0027】
本発明の下肢筋力評価方法、及びこれに用いる下肢筋力評価装置によれば、利便性が良好でかつ下肢筋力を精度良く評価することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の第一の実施形態に係る下肢筋力評価装置の構成を示すブロック図である。
【図2】上半身部センサ及び大腿部センサを被検者に固定し設置した状態を示す図である。
【図3】本体部の一例を示す外観図である。
【図4】下肢筋力評価装置を用いた、下肢筋力の余裕度の演算、評価方法の手順を示すフローチャートである。
【図5】被検者に行わせる、姿勢変化動作の一例を示す図である。
【図6】被検者の各部をセグメントとして示した図である。
【図7】下肢筋力の余裕度の演算結果、評価結果出力の態様の一例であり、(a)は、本体部のディスプレイの表示を示しており、(b)は、下肢筋力の余裕度の演算結果をグラフで表した図である。
【図8】第一の実施形態の他の例において、大腿部センサを被検者に固定し設置した状態を示す図である。
【図9】本発明の第二の実施形態に係る下肢筋力評価装置のセンサを被検者Hに設置した状態を示す図である。
【図10】床反力センサが検知する被検者Hに作用する反力を模式的に示した図である。
【図11】第二の実施形態における慣性センサ設置のバリエーションを示す図である。
【図12】被検者が姿勢変化動作を行う際に当該被検者が載る台の一例を示す図である。
【発明を実施するための形態】
【0029】
〔第一の実施形態〕
〔全体構成について〕
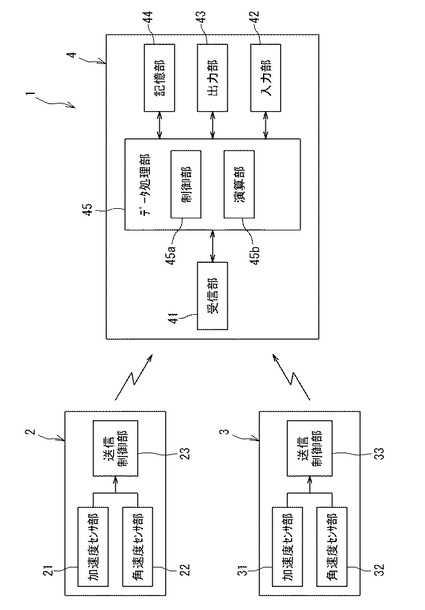
次に、本発明の好ましい実施形態について添付図面を参照しながら説明する。図1は、本発明の第一の実施形態に係る下肢筋力評価装置の構成を示すブロック図である。
図1において、下肢筋力評価装置1は、被検者の上半身部に固定される上半身部センサ2と、被検者の大腿部に固定される大腿部センサ3と、本体部4とを備えている。
【0030】
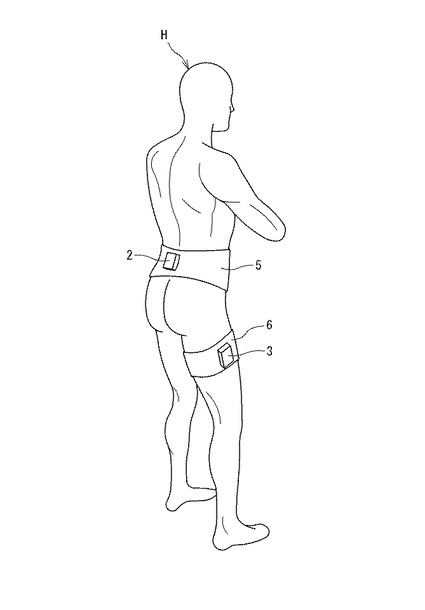
図2は、上半身部センサ2及び大腿部センサ3を被検者に固定し設置した状態を示す図である。両センサ2,3は、慣性センサを内蔵しており、被検者Hの上半身部及び大腿部の動きを示すパラメータ値を取得する機能を有している。
【0031】
上半身部センサ2は、被検者Hの腰部に装着される装具である腰部ベルト5に固定されている。被検者Hが腰部ベルト5を自身の腰に装着することで、上半身部センサ2は、被検者Hの上半身部、腰部背中側の最も前弯した部分に固定、設置される。腰部ベルト5は、上半身部センサ2が被検者Hの背中側であって腰部の最も前弯した部分に位置するように装着されるのを容易とする形状に形成されている。腰部の最も前弯した部分の近傍に上半身部の質量中心が存在しているため、上記のように腰部ベルト5を装着することで、上半身部の質量中心に対して一定の位置関係となるとともに、上半身部の所定方向(例えば脊柱の方向)に対して一定の関係となる位置に上半身部センサ2を固定することができる。
【0032】
さらに、一般に背中側は脂肪等が薄いので、上半身部センサ2は、背中側に固定されることで、上半身部の質量中心の近傍に固定できるとともに、被検者Hごとに安定した位置に固定することができる。
【0033】
大腿部センサ3は、被検者Hの大腿部に装着される装具である大腿部ベルト6に固定されている。被検者Hが大腿部ベルト6を自身の一方側の大腿部に装着することで、大腿部センサ3は、被検者Hの一方側大腿部の最も太い部分の外側面の幅方向ほぼ中央に固定される。大腿部ベルト6は、伸縮性のあるゴム素材を用いて形成されており、大腿部を適度に緊迫した状態で装着される。大腿部は、通常、股間側から足先に向かって先細りの形状となっているので、適度に緊迫した状態で大腿部ベルト6を大腿部に装着可能とすることで、当該大腿部ベルト6が位置ずれしてしまうのを防止することができる。
【0034】
また、大腿部の最も太い部分の近傍に大腿部の質量中心が存在しているため、上記のように大腿部ベルト6を装着することで、大腿部の質量中心の近傍に大腿部センサ3を固定できる。さらに、大腿部の質量中心に対して一定の位置関係となるとともに、大腿部の長手方向に対しても一定の関係となる位置に大腿部センサ3を固定することができる。
また、一般に大腿部の外側面は脂肪等が薄いので、大腿部センサ3は、大腿部の外側面に固定されることで、被検者Hごとに安定した位置に固定することができる。
【0035】
また、被検者Hの上半身部及び大腿部は、後述するようにそれぞれセグメントとして捉えられ、その質量中心における動きを示すパラメータが求められる。このとき、両センサ2,3がそのセンサの位置で検知する検知結果は、各セグメントの質量中心における値に補正する必要がある。
この点、本実施形態では、両センサ2,3を、それぞれの部位の質量中心に対して一定の位置関係でかつ質量中心の近傍に固定するとともに、被検者Hごとに安定した位置に固定することができるので、上記補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0036】
図1に戻って、上半身部センサ2及び大腿部センサ3は、それぞれ、慣性センサとして、加速度センサ部21,31、及び、角速度センサ部22,32を備えている。また、上半身部センサ2及び大腿部センサ3は、各センサ部21,22,31,32が出力する検知結果を示す出力信号を、本体部4に対して無線送信する送信制御部23,33を備えている。
【0037】
加速度センサ部21,31は、例えば、2軸の加速度センサによって構成されており、被検者Hの上半身部及び大腿部の動き(及び姿勢)を2軸方向の加速度として検知して送信制御部23,33に出力する機能を有している。
また、角速度センサ部22,32は、角速度センサによって構成されており、被検者の上半身部及び大腿部の動き(及び姿勢)を角速度として検知して送信制御部23,33に出力する機能を有している。
【0038】
なお、各センサ部21,22,31,32は、被検者Hに対する上半身部センサ2及び大腿部センサ3の固定位置に対して必要な方向の加速度及び角速度が検知できるように設けられている。
【0039】
以上のように、上半身部センサ2は、被検者Hの上半身部の動きを示す上半身部のパラメータ値として、被検者Hの背中側腰部における2軸の加速度と角速度を検知し、その検知結果を本体部4に無線送信によって出力する。また、大腿部センサ3も同様、被検者Hの大腿部の動きを示す大腿部のパラメータ値として、被検者Hの大腿部の最も太い部分の外側面における2軸の加速度と角速度を検知し、その検知結果を本体部4に無線送信によって出力する。
【0040】
また、両センサ2,3は、図示しない電源スイッチをON状態に操作すると、検知を開始し、検知結果である加速度及び角速度を示す信号の送信を開始する。
【0041】
本体部4は、両センサ2,3から送信される無線信号を受信する受信部41と、入力スイッチや、キーボードやマウス等からなる入力部42と、ディスプレイ等からなる出力部43と、システムプログラムや各種情報を記憶するためのメモリ等からなる記憶部44と、受信部41及び入力部42から得られる各種データに基づいてデータ処理を行うデータ処理部45とを備えている。
【0042】
受信部41は、両センサ2,3から検知結果を示す信号として送信される無線信号を受信し、受信信号をデータ処理部45に対して出力する。
記憶部44には、後述する下肢筋力の余裕度を算出するためのプログラムがインストールされており、このプログラムによって、下肢筋力の余裕度の算出、評価処理を行う機能部が実現されている。
【0043】
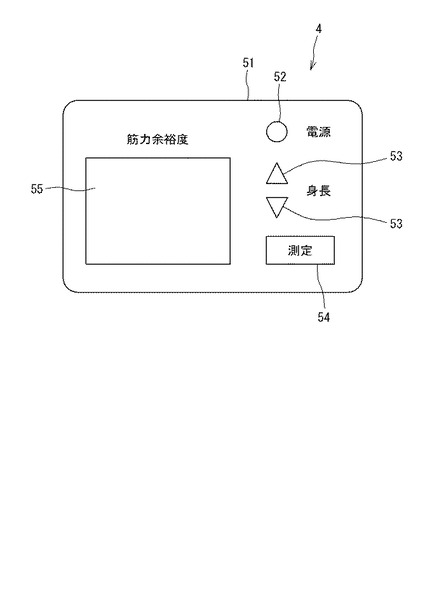
図3は、本体部4の一例を示す外観図である。本体部4は、各部を収納した筐体51の外側面に、本装置の電源をON又はOFFするための電源ボタン52、被検者Hの身長を入力するための入力ボタン53、測定の開始を入力するための測定開始ボタン54、及び、演算結果を表示するためのディスプレイ55が設けられている。
【0044】
上記入力ボタン53、及び測定開始ボタン54は、入力部42(図1)を構成しており、ディスプレイ55は、出力部43(図1)を構成している。
つまり、被検者Hが入力ボタン53を用いて自身の身長を入力することで、データ処理部45は、被検者Hの身長に関する情報を取得することができる。また、データ処理部45は、被検者Hが測定の開始を測定開始ボタン54を用いて入力することで、データ処理部45は、測定開始のタイミングを認識することができる。
測定が終わると、データ処理部45は、ディスプレイ55に演算、評価結果を表示する。これにより、データ処理部45は、被検者Hに対して演算、評価結果を認識させることができる。
【0045】
また、本体部4は、外部のコンピュータ等に接続するためのインターフェースを備えており(図示せず)、外部のコンピュータを介して制御可能とされている。よって、この場合、外部コンピュータのキーボードやマウスが入力部42を構成し、外部コンピュータのディスプレイやプリンタが出力部43を構成する。
【0046】
図1に戻って、データ処理部45は、本体部4が有する各部の動作を包括的に制御する制御部45aと、下肢筋力の余裕度を算出する機能を有する演算部45bとを備えている。このデータ処理部45の機能については、後に詳述する。
【0047】
〔下肢筋力の余裕度の算出、評価方法について〕
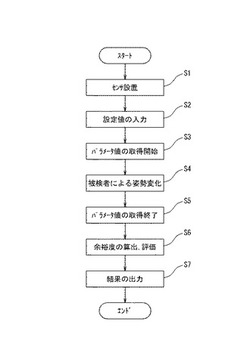
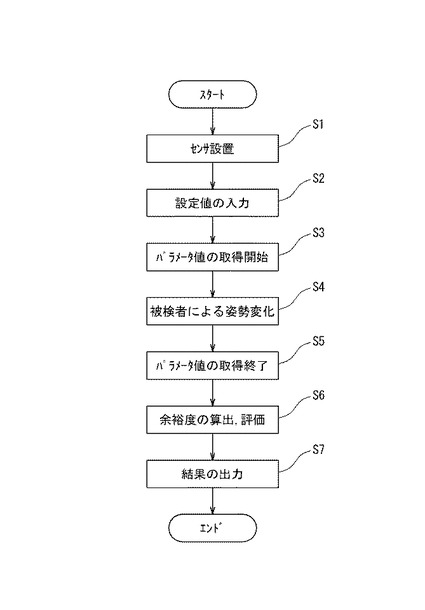
図4は、上記下肢筋力評価装置1を用いた、下肢筋力の余裕度の算出、評価方法の手順を示すフローチャートである。
下肢筋力の余裕度の算出、評価を行うには、まず、下肢筋力評価装置1の上半身部センサ2が固定された腰部ベルト5と、大腿部センサ3が固定された大腿部ベルト6とを被検者Hに装着することで、両センサ2,3を被検者Hに固定し設置する(ステップS1)。
【0048】
このとき、上半身部センサ2が被検者Hの背中側であって腰部の最も前弯した部分に位置するように、腰部ベルト5を被検者Hに装着する。
また、大腿部センサ3が被検者Hの一方側大腿部の最も太い部分の外側面の幅方向ほぼ中央に位置するように、大腿部ベルト6を被検者Hに装着する。
これによって、両センサ2,3は、それぞれ上半身部の質量中心及び大腿部の質量中心に対して一定の位置関係となるように固定される。
【0049】
さらに、両センサ2,3を被検者Hに設置した後、両センサ2,3の電源スイッチ(図示せず)をON状態にする。これにより、両センサ2,3は、それぞれの検知結果である、各部の動きを示すパラメータ値としての加速度及び角速度を示す信号の送信を開始する。
【0050】
次いで、下肢筋力評価装置1電源スイッチをON状態とし、本体部4に設けられた入力ボタン53を操作して、被検者Hの身長等の設定値を入力する(ステップS2)。
入力ボタン53の操作によって、被検者Hの身長が入力されると、本体部4の制御部45a(図1)は、入力された値を記憶部44(図1)に記憶する。
なお、被検者Hの身長が入力されなかったとしても、制御部45aは処理を続行する。この場合、制御部45aは、予め記憶部44に記憶されている、下肢筋力の余裕度を算出する上で標準的な被検者Hの身長を読み込み、これを用いて処理を行う。
【0051】
被検者Hの身長を入力した後、測定開始ボタン54を操作することで、制御部45aは、受信部41が受信した受信信号から得られる、両センサ2,3の検知結果である加速度と角速度(被検者Hの動きを示すパラメータ値)の取得を開始する(ステップS3)。
【0052】
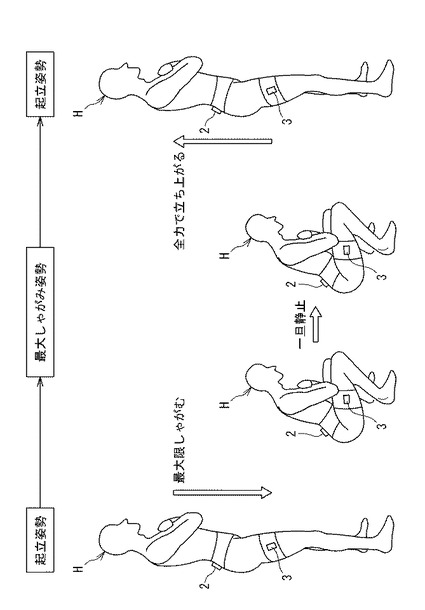
次いで、両センサ2,3を固定、設置した被検者Hに、姿勢変化動作を行わせる(ステップS4)。図5は、被検者Hに行わせる、姿勢変化動作の一例を示す図である。
図5に示すように、まず、初期の姿勢として、被検者Hに起立姿勢を取ってもらう。次に、この起立姿勢から、被検者Hにとっての最大限の深さでしゃがんでもらい、その姿勢(最大しゃがみ姿勢)で一旦停止してもらう。
その後、被検者Hに最大しゃがみ姿勢から全力で立ち上がってもらい、再度、起立姿勢を取ってもらう。
【0053】
被検者Hが上記の姿勢変化動作を行っている間、制御部45aは、両センサ2,3の検知結果である加速度と角速度の取得を継続して行う。なお、制御部45aは、両センサ2,3の検知結果である加速度と角速度を、所定のサンプリング時間に対応付けた離散値として取得し、随時記憶部44に記憶する。
【0054】
被検者Hが上記姿勢変化動作を終えたことで、再度、測定開始ボタン54が操作されると、制御部45aは、両センサ2,3の検知結果の取得を終了する(ステップS5)。
【0055】
制御部45aは、両センサ2,3の検知結果の取得を終了すると、下肢筋力の余裕度を算出するための演算を演算部45bに行わせる(ステップS6)。
【0056】
まず、演算部45bは、被検者Hの上半身部、大腿部、下腿部、及び足部をそれぞれセグメント(上半身部セグメント、大腿部セグメント、下腿部セグメント、及び足部セグメント)として捉えたときの、上半身部と大腿部を繋ぐ股関節の関節モーメント(股関節モーメント)と、大腿部と下腿部を繋ぐ膝関節の関節モーメント(膝関節モーメント)との和を求める。
【0057】
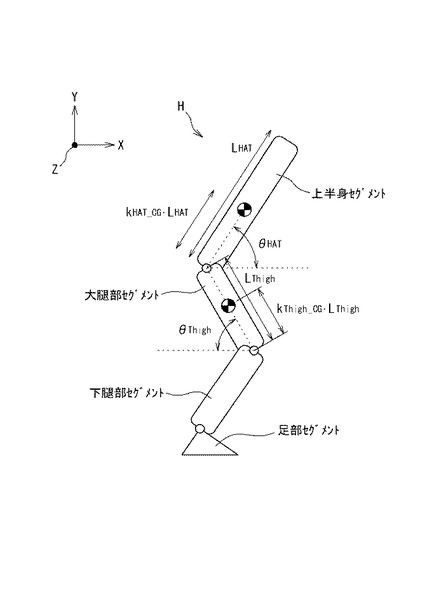
図6は、被検者Hの各部をセグメントとして示した図である。演算部45bは、被検者Hの各セグメントの動きを、図6中の紙面中に示すように被検者の前後方向をX座標、上下方向をY座標、左右方向をZ座標とした座標系の中で把握し、股関節と膝関節の関節モーメントの和Thip+knee(t)を、下記式(1)に基づいて求める。
【0058】
【数3】
【0059】
但し、式(1)中、Aは、下記式(2)によって表される。また、PHは、慣性座標系における上半身部セグメントの質量中心の並進加速度、PTは、慣性座標系における大腿部セグメントの質量中心の並進加速度であり、下記式(3),(4)によって表される。
【0060】
【数4】
【0061】
また、式(1)中、LThighは、大腿部セグメントの長手方向の長さ、kThighは、大腿部セグメントの長手方向における質量中心位置を示すパラメータ、θThigh(t)は、大腿部セグメントの角度であり、これら各パラメータは、それぞれ、図6のように表される。
さらに、式(1)中、BalRLは、床反力における左右バランスを示すパラメータ(本実施形態では、0.5に設定)、mBodyは、被検者Hの全質量、mHATは、上半身部セグメントの質量、mThighは、大腿部セグメントの質量、gは、重力加速度、tは、被検者Hが、起立姿勢から最大しゃがみ姿勢に移行し、さらに最大しゃがみ姿勢から再度起立姿勢に移行するまでの間の時間を示している。
式(2)中、radThighは、大腿部セグメントの慣性モーメントを求める際の回転半径をセグメントの長さで標準化した値である。
【0062】
【数5】
【0063】
なお、上記大腿部セグメントの角加速度は、(d2/dt2)θThigh(t)と示す場合がある。
【0064】
上記式(1)中、並進加速度PH、並進加速度PT、大腿部セグメントの角度θThigh(t)、大腿部セグメントの角加速度(d2/dt2)θThigh(t)は、両センサ2,3の検知結果から求められる、時間t(被検者Hの動作)に応じて変化する変数である。演算部45bが、両センサ2,3の検知結果からこれら変数を求めるための処理については、後に説明する。
一方、他のパラメータ(LThigh、kThigh、BalRL、mBody、mHAT、mThigh、radThigh、g)は、時間tに対して変化しない定数である。演算部45bは、これら定数の内、床反力における左右バランスを示すパラメータBalRL、については「0.5」を、重力加速度gについては「9.80665」を用いるように予め設定される。
【0065】
また、被検者Hの体格等に応じて変化する残りのパラメータ(LThigh、kThigh、mBody、mHAT、mThigh)について、演算部45bは、ステップS2で入力される被検者Hの身長に基づく推定値を用いる。
例えば、被検者Hの身長と、その身長に対応する各パラメータの推定値とが関連付けて登録されたデータベースを記憶部44に記憶しておけば、演算部45bは、入力された被検者Hの身長に応じた各パラメータの推定値を前記データベースを参照することにより取得することができる。なお、前記データベースに登録される各パラメータの推定値としては、研究成果として報告されている文献等に基づいたデータや、その他の統計的なデータに基づいて、身長に応じた各パラメータの値を推定したものを用いることができる。
【0066】
また、被検者Hの身長が入力されなかったとしても、上述のように、演算部45bは、予め記憶部44に記憶されている、下肢筋力の余裕度を算出する上で標準的な被検者Hの身長を読み込み、これを用いて各パラメータの推定値を取得する。
【0067】
演算部45bは、上記式(1)中、並進加速度PH、並進加速度PT、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)を、両センサ2,3の検知結果から求める。
【0068】
各センサ2,3の加速度センサ部21,31は、各センサ2,3が、被検者Hに固定されたときに、図6中、X−Y平面上における2軸の加速度を検知することができるように設けられている。
【0069】
演算部45bは、大腿部セグメントの角度θ(t)については、動作開始時のセグメント角度を初期値として、大腿部センサ3の検知結果に含まれる大腿部セグメントの角速度を時間tで積分して求める。また、動作開始時の初期値は、検知結果に含まれる大腿部セグメントの加速度の方向によって把握できる。つまり、セグメントが静止状態であれば、加速度センサ部は、重力のみを検知することとなるので、センサ部に対する重力の方向から、セグメントの相対的な角度を把握することができる。
【0070】
演算部45bは、大腿部セグメントの角加速度(d2/dt2)θThigh(t)については、大腿部センサ3の検知結果に含まれる大腿部セグメントの角速度((d/dt)θThigh(t))を時間tで微分することで求める。
【0071】
上半身部セグメントの質量中心の並進加速度PHについては、上半身部センサ2の検知結果に含まれる上半身部セグメントの加速度と、角速度を用いて求められる。
上半身部センサ2の検知結果である加速度は、加速度センサ部21の位置における加速度を、自身の座標系(センサ座標系)で示している。よって、上半身部セグメントの質量中心における加速度を求めるために、演算部45bは、検知結果である加速度を上半身部セグメントの質量中心における加速度に補正し、さらに、補正後の加速度を慣性座標系(図6に示す座標系)に座標変換する。これによって、上半身部セグメントの質量中心の並進加速度PHを求めることができる。
【0072】
検知結果である加速度を上半身部セグメントの質量中心における加速度に補正するために、演算部45bは、加速度センサ部21の位置と、上半身部セグメントの質量中心との間の相対的な位置関係と、検知結果に含まれる角速度とを用いて加速度のずれを算出して補正する。
【0073】
加速度センサ部21の位置と、上半身部セグメントの質量中心との間の相対的な位置関係は、実際に計測した値を用いることもできるが、本実施形態では、上述したように、上半身部の質量中心に対して一定の位置関係となる位置に上半身部センサ2を固定するので、前記位置関係を近似的に示すデータを予め記憶しておき、その記憶したデータを用いることができる。また、前記位置関係を示すデータは、被検者Hの身長に応じて若干変化する場合があるので、例えば、被検者Hの身長と、身長に対応して補正された前記位置関係を示すデータとが関連付けられたデータベースを記憶部44に記憶しておけば、演算部45bは、被検者Hの身長に応じた前記位置関係を示すデータをデータベースを参照することにより、より精度の高いデータを取得できる。
【0074】
また、被検者Hの身長が入力されなかったとしても、演算部45bは、予め記憶部44に記憶されている、下肢筋力の余裕度を演算する上で標準的な前記位置関係示すデータを読み込み取得するようにすることもできる。
【0075】
このように、本実施形態では、上半身部センサ2を適切に固定したので、補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0076】
さらに、加速度センサ部21は、上半身部セグメントに対して一定の位置関係で固定されるので、予め、センサ座標系から慣性座標系に座標変換するための変換行列を近似的に求めておいて、記憶部44に記憶しておくことができる。
演算部45bは、記憶部44に記憶された変換行列を用いて、センサ座標系である補正後の加速度を慣性座標系に変換する。
これにより、演算部45bは、並進加速度PHを求めることができる。
【0077】
演算部45bは、並進加速度PHと同様に、大腿部センサ3の検知結果に含まれる大腿部セグメントの加速度と、角速度について、補正、座標変換を行い、大腿部の質量中心の並進加速度PTを求める。
【0078】
以上のようにして、演算部45bは、被検者Hの身長、両センサ2,3の検知結果に基づいて上記各値を求め、股関節と膝関節の関節モーメントの和Thip+knee(t)を求める。
【0079】
次に、演算部45bは、図5で示した姿勢変化動作の間における股関節と膝関節の関節モーメントの和Thip+knee(t)の内の最大値を取得し、下記式(5)に基づいて、下肢筋力の余裕度を求める。
【0080】
【数6】
【0081】
上記式(5)中、Muscle_marginは、下肢筋力の余裕度、max(Thip+knee(t))は、股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。この基準値Trefhip+kneeは、下記式(6)で表される。
【0082】
【数7】
【0083】
上記式(6)中、右辺より得られる値は、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeであり、被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す値である基準値Trefhip+kneeと一致する。
【0084】
すなわち、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+knee(基準値Trefhip+knee)以上の値を姿勢変化動作で発揮できる筋力が、被検者Hにある場合には、その被検者Hは、大腿部が水平となるよりも深くしゃがんだしゃがみ姿勢からでも起立可能な筋力を有していると評価することができる。
つまり、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+knee(基準値Trefhip+knee)よりも、測定により得られる股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が大きければ、その被検者Hには、しゃがみ姿勢から立ち上がることが可能な筋力があると評価できる。
なお、基準値Trefhip+kneeは、上記式(6)から得られることで、時間に応じて変化しない定数として得ることができる。
【0085】
本実施形態の演算部45bは、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+kneeを基準値Trefhip+kneeとした上で、被検者Hによる姿勢変化の間の測定(検知結果)によって得られた被検者Hの股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が、基準値Trefhip+kneeに対してどの程度の割合かを百分率で算出し、これを下肢筋力の余裕度として出力する。従って、基準値Trefhip+kneeに対して、関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が大きく、立ち上がるための筋力が大きい場合には、余裕度は、100%を超える値となる。逆に、関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が基準値Trefhip+kneeよりも小さく、立ち上がるための筋力が小さい場合には、余裕度は、100を下回る値となる。
【0086】
演算部45bが、下肢筋力の余裕度を算出すると、制御部45aは、その下肢筋力の余裕度の値から、下肢筋力の余裕度のレベル評価を行う。制御部45aは、例えば、下肢筋力の余裕度のレベルをその値に応じて、「高」、「中」、「低」の3段階で評価を行う。
【0087】
図4に戻って、次に、制御部45aは、下肢筋力の余裕度の数値と、評価レベルとをディスプレイ55に表示することで、演算結果、評価結果の出力を行い(ステップS7)、処理を終える。
【0088】
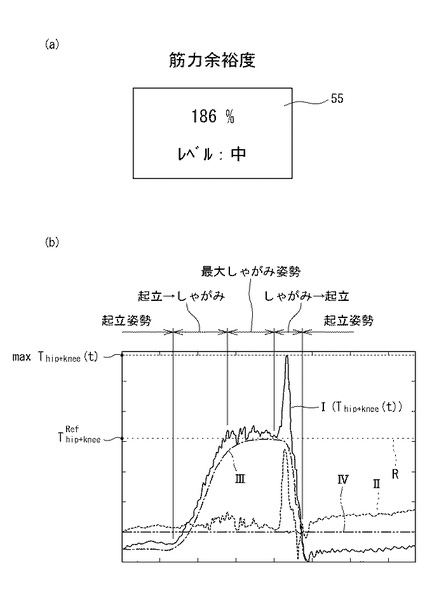
図7は、下肢筋力の余裕度の算出結果、評価結果出力の態様の一例であり、(a)は、本体部4のディスプレイ55の表示を示している。
図7(a)では、下肢筋力の余裕度の数値が「186%」、評価レベルが「中」である場合を示している。このように、下肢筋力評価装置1は、演算、評価結果を被検者Hに対して出力する。
【0089】
また、図7(b)は、下肢筋力の余裕度の演算結果をグラフで表した図である。
図7(b)中のグラフは、横軸が時間tであり、縦軸がモーメントを示している。図中の線図は、被検者Hが起立姿勢から最大しゃがみ姿勢に移行し、さらに最大しゃがみ姿勢から全力で立ち上がることで起立姿勢となる一連の動作の間の演算結果を示している。
【0090】
図中、実線で示している線図Iは、股関節と膝関節の関節モーメントの和Thip+knee(t)(以下、単に関節モーメントの和Thip+knee(t)ともいう)を示している。図中、紙面左側の関節モーメントの和Thip+knee(t)が比較的低い値の範囲では、被検者Hは起立姿勢である。被検者Hが起立姿勢からしゃがみ姿勢に姿勢変化の動作を開始すると、関節モーメントの和Thip+knee(t)は、序々に増加し、最大しゃがみ姿勢となるところでほぼ一定の値に維持される。
その後、被検者Hが全力で立ち上がると、関節モーメントの和Thip+knee(t)は、急激に上昇して最大値を採り、起立姿勢に至ると急激に低下する。そして、起立姿勢の維持によって、再度、低い値で安定する。
【0091】
ここで、基準値Trefhip+kneeは、図7(b)のグラフ中、破線Rで示される。よって、下肢筋力の余裕度は、この破線Rよりも関節モーメントの和の最大値max(Thip+knee(t))が大きくなると、100%以上となる。
【0092】
図中、破線で示している線図IIは、上記式(1)中の並進加速度PH、PTといった加速度に関わる値の合計値を示す値であり、被検者Hの動作の機敏さを示している。また、一点鎖線で示している線図IIIは、上記式(1)中の「g」を含む項の合計値を示す値であり、被検者Hが、どの程度の深さでしゃがんでいるかといったしゃがみ度合を示している。また、二点鎖線で示している線図IVは、上記式(1)中、「rad」を含む項を示す値であり、図6中のZ軸方向の成分を示している。よって、線図IVは、被検者Hの起立姿勢からしゃがみ姿勢から起立姿勢への姿勢変化においては、ほとんど変化がない。
つまり、線図Iは、線図II、III、IVを合計した線図となっており、関節モーメントの和の最大値max(Thip+knee(t))は、被検者Hのしゃがみ度合に基づく値と、被検者Hの起立動作の機敏さに基づく値とを合計した値となっており、被検者の最大しゃがみ姿勢の影響を含む値として得ることができる。
【0093】
図7(b)に示すグラフは、比較的年齢の若い下肢筋力の余裕がある被検者Hの演算結果を示しているが、ここで、仮に、下肢筋力が低く、最大しゃがみ姿勢が、大腿部が水平状態にまで到達できない程度に浅い場合、線図IIIの値が低い値となり、関節モーメントの和Thip+knee(t)も基準値Trefhip+kneeに到達しない比較的低い値となる。
この場合においても、その状態から起立姿勢に姿勢変化することで、関節モーメントの和の最大値max(Thip+knee(t))を取得することができる。
このとき、関節モーメントの和Thip+knee(t)は、比較的低い値として現れている最大しゃがみ姿勢での値から、起立姿勢を取ることで上昇を開始し、最大値max(Thip+knee(t))に達するので、この最大値max(Thip+knee(t))は、最大しゃがみ姿勢における関節モーメントの和Thip+knee(t)の影響も含んでおり、被検者Hの最大しゃがみ姿勢の影響を含む値として得ることができる。
【0094】
〔本方法の効果について〕
上記のように構成された下肢筋力を評価する方法では、被検者Hの動きを示すパラメータ値を取得するための上半身部センサ2及び大腿部センサ3を設置するセンサ設置ステップ(ステップS1)と、被検者Hが可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、被検者Hの上半身部及び大腿部の動きを示す加速度及び角速度(上半身部のパラメータ値、大腿部のパラメータ値)を上半身部センサ2及び大腿部センサ3によって取得するパラメータ値取得ステップ(ステップS3〜S5)と、取得した上半身部及び大腿部の加速度及び角速度から、被検者Hの股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、前記最大値と、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値Trefhip+kneeとに基づいて下肢筋力の余裕度を算出する算出ステップ(ステップS6)とを備えている。
【0095】
上記の下肢筋力を評価する方法によれば、被検者Hが最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における被検者Hの大腿部及び上半身部の加速度と角速度から股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、この最大値と、起立するために必要な必要最小筋力を示す基準値基準値Trefhip+kneeとを用いて余裕度を算出するので、精度良く評価を行うことができる。
また、関節モーメントの和の最大値max(Thip+knee(t))に基づいて下肢筋力の余裕度を算出するので、余裕度を、被検者Hの最大しゃがみ姿勢の影響を含んだ値として得ることができる。このため、被検者Hごとの筋力の相違によって最大しゃがみ姿勢に相違があったとしても、その最大しゃがみ姿勢の相違も含めた下肢筋力の余裕度として評価を行うことができる。
【0096】
また、本実施形態の演算部45bは、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeを、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値(基準値Trefhip+knee)として採用し、下肢筋力の余裕度を求める。これにより、基準値Trefhip+kneeを、時間に応じて変化しない定数として得ることができるので(式(6)参照)、より安定した精度で下肢筋力の余裕度を算出することができる。
【0097】
また、本実施形態では、加速度センサ部21,31や、角速度センサ部22,32等の慣性センサといった、被検者Hの動きを示すパラメータ値を取得することができるセンサを設置して、上記下肢筋力の余裕度を求めるので、利便性良く評価を行うことができる。
【0098】
また、本実施形態のステップS1では、上記のように、上半身部センサ2及び大腿部センサ3を被検者Hに固定するので、簡単な作業で、大腿部センサ3を固定し大腿部の動きを示すパラメータ値を取得することができ、利便性を高めることができる。
【0099】
また、本実施形態の演算部45bは、股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を、大腿部の加速度及び角速度と、上半身部の加速度及び角速度とに基づいて求めるので、より精度よく評価を行うことができる。
この点、大腿部センサ3の検出結果である大腿部の加速度及び角速度のみで、下肢筋力の余裕度を求めることもできる。
【0100】
また、本実施形態では、ステップS2で被検者Hの身長を入力し、この身長に基づいて、被検者Hの大腿部の長手方向の長さLThigh、質量中心位置を示すパラメータkThigh、被検者Hの全質量mBody、上半身部の質量mHAT、及び大腿部の質量mThighを推定するので、下肢筋力の余裕度を求めるのに必要な定数を全て用意せずとも、文献等のデータや、その他の統計的なデータを用いて、被検者Hの身長に応じて前記定数を推定することができ、評価精度を低下させることなく利便性を高めることができる。
【0101】
また、本実施形態では、パラメータ値取得ステップであるステップS3〜S5において、起立姿勢の被検者Hが、最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における両センサ2,3の検知結果である加速度と角速度を取得するので、起立姿勢から最大しゃがみ姿勢に姿勢変化するときの被検者Hの股関節及び膝関節の関節モーメントの和Thip+knee(t)の相対変化を把握することができ、当該被検者Hの起立姿勢を基準とした最大しゃがみ姿勢の状態を把握することができる。
〔第一実施形態の変形例について〕
上記式(1)中、上半身部セグメントの並進加速度PHは、下記式(7)に示すように、大腿部セグメントの並進加速度PTを用いて表すことができる。
【0102】
【数8】
【0103】
上記式(7)中、LHATは、上半身部セグメントの長手方向の長さ、kHATは、上半身部セグメントの長手方向における質量中心位置を示すパラメータ、θHAT(t)は、上半身部セグメントの角度であり、これら各パラメータは、それぞれ、図6のように表される。
【0104】
ここで、演算部45bは、式(1)に式(7)を代入し、かつ、上半身部セグメントの角度θHAT(t)、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)に、大腿部セグメントの角度θThigh(t)、上半身部セグメントの角速度(d/dt)θThigh(t)、角加速度(d2/dt2)θThigh(t)に基づいて推定した推定値を用いることで、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0105】
演算部45bは、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)を推定する際、過去のデータに基づいた統計的情報や物理的制約条件を用いて推定する。
【0106】
上記のように、式(7)を代入した式(1)を用いることで、演算部45bは、大腿部センサ3の検出結果のみから得られる、大腿部セグメントの角度θThigh(t)、上半身部セグメントの角速度(d/dt)θThigh(t)、角加速度(d2/dt2)θThigh(t)に基づいて、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0107】
この場合、演算部45bは、大腿部センサ3の検出結果のみから、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができるので、上半身部センサ2を被検者Hに設置する必要がない。
従って、演算部45bが上記式(7)を代入した式(1)を用いる場合には、大腿部センサ3のみを被検者Hの大腿部に設置すれば、下肢筋力の余裕度の評価を行うことができる。
この場合、被検者Hに大腿部センサ3を一つだけ設置すればよいので、さらに利便性を高めることができる。
【0108】
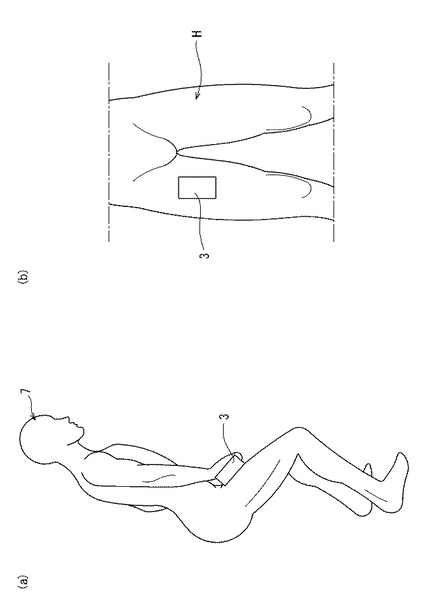
さらに、上記の場合、図8に示すように、大腿部センサ3を被検者Hが手で大腿部の前面側に押さえて固定すれば、図2で示したような大腿部ベルトといった、固定用の装具を用いることなく、被検者Hの大腿部に大腿部センサ3を固定し設置することができる。このため、大腿部への大腿部センサ3の着脱が容易となる。
【0109】
なお、この場合、図8(a)、(b)に示すように、被検者Hは、大腿部の前面側の幅方向ほぼ中央でかつ脚の付け根付近に、大腿部センサ3を押し付けて固定する。大腿部の長手方向の中央部付近に固定すると、被検者Hが起立する際に、腕が届かなくなり、大腿部センサ3を固定できなくなるからである。このとき、演算部45bは、大腿部センサ3が図8に示すような位置(脚の付け根付近)に設置されたときの大腿部の質量中心と大腿部センサ3との位置関係に応じた補正を行うように設定される。
【0110】
また、演算部45bは、上記式(7)中の上半身部セグメントの角度θHAT(t)、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)を含む項を「0」とみなした下記式(8)を用いて上半身部セグメントの並進加速度PHを近似的に求めてもよい。
【0111】
【数9】
【0112】
さらに、演算部45bは、上記式(8)中の大腿部の角加速度(d2/dt2)θThigh(t)を「0」とみなした下記式(9)を用いて上半身部セグメントの並進加速度PHを近似的に求めてもよい。
【0113】
【数10】
【0114】
さらに、演算部45bは、上記式(1)中、項Aも「0」に近似して股関節及び膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0115】
上記近似式を用いることで、演算部45bが行う演算量を抑制でき、より速やかに下肢筋力の余裕度の演算、評価を行うことができる。
【0116】
〔第二の実施形態〕
図9は、本発明の第二の実施形態に係る下肢筋力評価装置のセンサを被検者Hに設置した状態を示す図である。
本実施形態の下肢筋力評価装置1は、本体部4の筐体51の上面60に被検者Hが起立可能とされ、上面60に被検者Hに作用する床反力を検知するための床反力センサ61を備えている点で、上記第一実施形態と相違する。
【0117】
本実施形態において、下肢筋力評価装置1は、大腿部センサ3と、本体部4に設けられた床反力センサ61とによって、被検者Hの動きを示すパラメータ値を取得する。
本体部4には、上面60に床反力センサ61の他、演算、評価結果を表示するためのディスプレイ55が設けられている。
本実施形態では、大腿部センサ3は、本体部4に対して有線接続されており、通信線62を介して検知結果を出力する。
【0118】
図10は、床反力センサ61が検知する被検者Hに作用する反力を模式的に示した図である。
本体部4の上面60に設けられた床反力センサ61は、図に示すように、被検者Hに作用する反力の内、上下方向成分と、前後方向成分とを検知する。床反力センサ61は、その検知結果をデータ処理部45(図1)に出力する。
【0119】
本実施形態の演算部45bは、図4中ステップS6において行う下肢筋力の余裕度を算出するための演算で用いる、股関節と膝関節との関節モーメントの和Thip+knee(t)を、下記式(10)に基づいて求める。
【0120】
【数11】
【0121】
上記式(10)中、Aは、上記式(2)によって表される。
PSは慣性座標系における下腿部セグメントの質量中心の並進加速度、PFは、慣性座標系における足部セグメントの質量中心の並進加速度であり、下記式(11),(12)によって表される。
【0122】
【数12】
【0123】
また、式(10)中、mShankは、下腿部セグメントの質量、mFootは、足部セグメントの質量を示している。
さらに、Rcop1_G(t)は、被検者Hに作用する床反力の前後成分を示している。また、Rcop2_G(t)は、被検者Hに作用する床反力の上下成分を示している。
【0124】
演算部45bは、上記式(10)中、前後成分床反力Rcop1_G(t)、上下成分床反力Rcop2_G(t)、並進加速度PT、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)を、両センサ3,61の検知結果から求める。
【0125】
前後成分床反力Rcop1_G(t)、及び、上下成分床反力Rcop2_G(t)は、床反力センサ61の出力を用いる。他の値は、上述の通り、大腿部センサ3の検知結果である大腿部の加速度と、角速度とに基づいて求められる。
また、式(10)中、下腿部セグメントの質量中心の並進加速度PS、及び、足部セグメントの質量中心の並進加速度PFは、被検者Hの下腿部及び足部に慣性センサを設置して検知することもできるが、本実施形態では、演算部45bは、下腿部セグメントの質量中心の並進加速度PS、及び、足部セグメントの質量中心の並進加速度PFを、「0」に近似した上で、股関節と膝関節との関節モーメントの和Thip+knee(t)を求める。
【0126】
演算部45bは、上記股関節と膝関節との関節モーメントの和Thip+knee(t)を用いて下肢筋力の余裕度を算出する。
【0127】
以上のように、本実施形態では、床反力センサ61と大腿部センサ3の検知結果を用いて股関節と膝関節との関節モーメントの和Thip+knee(t)を求めることができるので、被検者Hが本体部4の床反力センサ61上に起立し、大腿部センサ3を大腿部に固定した上で、起立姿勢からしゃがんで最大しゃがみ姿勢に移行し、さらに、最大しゃがみ姿勢から全力で立ち上がることで起立姿勢に移行すれば、下肢筋力の余裕度の算出、評価を行うことができる。
【0128】
本実施形態において、演算部45bが用いる上記式(10)には、前後成分床反力Rcop1_G(t)、上下成分床反力Rcop2_G(t)、時間t(被検者Hの動作)に応じて変化する変数として、並進加速度PT、並進加速度PS、並進加速度PF、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)が含まれている。
よって、上記変数を求めるための慣性センサを、被検者Hに設置すれば、当該被検者Hの動作をより精度よく把握でき、この結果、下肢筋力の余裕度の算出、評価も精度良く行うことができる。すなわち、大腿部セグメントの他、下腿部セグメント、足部セグメントに、慣性センサを固定し、各センサによる検知結果として得られる加速度、角速度を用いれば、より精度の高い演算、評価を行うことができる。
【0129】
図11は、第二の実施形態における慣性センサ設置のバリエーションを示す図である。
図11(a)は、図9で示したものと同様の構成であり、大腿部センサ3と床反力センサ61とを用いたものを示している。
図11(b)は、(a)の構成に加えて、下腿部セグメントに慣性センサ70を固定した場合を示している。この例では、下腿部セグメントに固定された慣性センサ70の検知結果によって、並進加速度PSを求めることができる。
【0130】
また、図11(c)は、(a)の構成に加えて、足部セグメントに慣性センサ71を固定した場合を示している。この例では、足部セグメントに固定された慣性センサ71の検知結果によって、並進加速度PFを求めることができる。
【0131】
また、図11(d)は、(a)の構成に加えて、下腿部セグメントに慣性センサ70、
足部セグメントに慣性センサ71を固定した場合を示している。この例では、両慣性センサ70,71の検知結果によって、並進加速度PS、並進加速度PFを求めることができる。
【0132】
なお、上述したように、並進加速度PS、並進加速度PFは、「0」に近似することもできる。また、床反力センサ61により検知される前後成分床反力Rcop1_G(t)も、しゃがみ動作においては、「0」に近似できる。つまり、上下成分の床反力のみを検知できる床反力センサ61を用いたとしても、下肢筋力の余裕度の算出が可能である。
さらに、式(10)中、項Aも「0」に近似できる。
よって、本実施形態では、慣性センサの設置状況や、必要精度に応じて、いずれの変数の値を「0」に近似するかを選定し、下肢筋力の余裕度の算出、評価を行うことができる。
【0133】
〔その他の変形例〕
今回開示した実施形態はすべての点で例示であって制限的なものではない。
例えば、上記第一の実施形態では、上半身部センサ2、及び大腿部センサ3が、それぞれ、慣性センサとして、二軸の加速度センサ部21,31、及び角速度センサ部22,32を備えている場合を示したが、一のセンサが加速度センサ部と角速度センサ部を共に備える必要はない。つまり、加速度センサが検知する加速度に基づいて、当該センサの鉛直方向に対する傾き角度を求めることができる。センサが検知する重力の方向及びその大きさによって、そのセンサの座標系の鉛直方向に対する角度を求めることができるからである。
上記理由から、上記両センサ2,3が、二軸の加速度センサ部のみを備えて構成されていてもよい。
【0134】
また、両センサ2,3は、加速度センサ部21,31、及び角速度センサ部22,32に加えて、地磁気センサを備えていても良く、この場合、地磁気センサによる地磁気データを用いることで、角速度を積分したセグメントの角度データをより精度良く補正することができる。
【0135】
また、上記各実施形態では、加速度センサとして、二軸の加速度センサを用いた場合を例示したが、三軸の加速度センサを用いることもでき、この場合、立体的に被検者Hの動きを検知することができる。
なお、上述の慣性センサは、必要精度やコストに応じて適宜選定される。
【0136】
また、上記各実施形態において、上半身部センサ2を腰部背中側の最も前弯した部分に固定し、大腿部センサ3を大腿部の最も太い部分の外側面の幅方向ほぼ中央に固定した場合を例示したが、各センサ2,3の検知結果を各部位の質量中心の位置における値に補正すれば、上半身部センサ2を、例えば、被検者Hの胸部前面や、腹部前面に固定することができるし、大腿部センサ3を、大腿部の付け根や膝関節付近に固定することができる。
【0137】
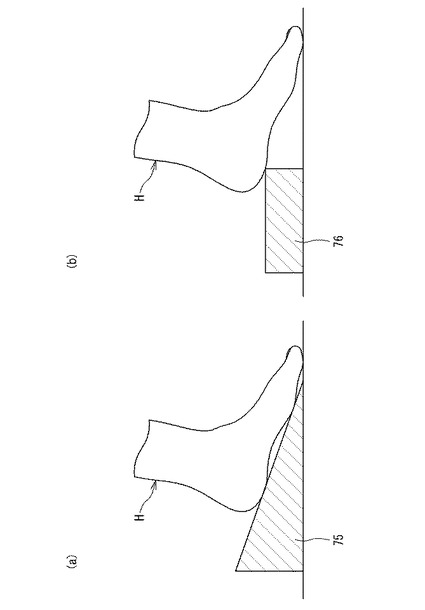
本発明の下肢筋力評価方法では、ある程度の深さのしゃがみ姿勢を取ることができれば評価することができるが、足関節(足首)の柔軟性が低い被検者Hの場合、しゃがみ込むのが困難な場合があり、最大しゃがみ姿勢が評価可能な程度のしゃがみ込み深さに達しない場合も考えられる。
このような場合には、図12(a)に示すように、被検者Hの載る面につま先下がりのスロープが形成された踏み台75や、被検者Hのかかとを載せるためのかかと載せ台76を用いて、被検者Hに姿勢変化動作を行わせてもよい。
この場合、足関節の柔軟性が低いとしても、被検者Hは容易にしゃがみ姿勢を取ることができ、確実に下肢筋力の余裕度の算出、評価を行うことができる。
【0138】
また、上記第一の実施形態では、ステップS2(図4)において、設定値として被検者Hの身長の入力を求め、身長を用いて下肢筋力の余裕度の算出を行う場合を示したが、身長だけでなく、被検者Hの体重の入力も求め、身長に加えて体重も用いて下肢筋力の余裕度の算出を行ってもよい。この場合、上半身部の質量mHATや、大腿部の質量mThighの推定精度をより高めることができる。
【0139】
また、上記第二の実施形態で用いた床反力センサ61は、被検者Hが静止していれば、被検者Hの体重も測定することもできる。よって、この場合、床反力センサ61によって被検者Hの体重を取得してもよい。
【0140】
ここで、本発明の下肢筋力評価装置は、体粗成計や体重計と組み合わせることで、被検者Hの体重変化に応じた下肢筋力の余裕度の変化を示すこともできる。例えば、体重100kg、余裕度120%の被検者が、80kgまで体重が減少した場合の余裕度を試算し、当該被検者に出力することができる。この場合、被検者の体重が80kgまで減少すると、余裕度は、下記式(13)に示すように、150%と試算できる。
(100/80) × 120 = 150 ・・・(13)
【0141】
上記のような情報を被検者Hに提供することにより、リハビリテーションや、トレーニング等の方向性の示唆や、効果の確認等を行うことができる。
【符号の説明】
【0142】
1 下肢筋力評価装置
2 上半身部センサ
3 大腿部センサ
45 データ処理部(演算部)
【技術分野】
【0001】
本発明は、被検者の下肢筋力を評価するための方法、及びこれに用いる筋力評価装置に関する。
【背景技術】
【0002】
下肢筋力は、歩行移動や、立ち動作、座り動作等、日常生活を送る上で非常に重要であり、高齢化が進む中、この下肢筋力を日常的に測定し評価する必要性が高まっている。
下肢筋力を測定する方法としては、動力計(ダイナモメータ)等を用いて膝関節や股関節の伸展、屈曲時の筋力を直接測定する方法(方法1)や、日常生活動作に基づいた評価値を測定する方法(方法2)がある。
【0003】
方法2には、例えば、普通の椅子を用いて立ち座りを所定回数繰り返し行い、それに要する時間を計測して下肢筋力を評価する方法(椅子座り立ちテスト)や、被検者がしゃがみ姿勢から立ち姿勢に移行する際の当該被検者の足下荷重の変化を測定し、この荷重変化に基づいて下肢筋力を評価する方法などがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−92979号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記方法1では、動力計を備え、被検者の各部の筋力を直接測定することが可能な測定装置を用いて行うので、客観的な測定値が精度良く得られる。しかし、測定装置が、大がかりでかつ高価であるため、通常、研究機関や専門機関に設置されることが多い。このため、日常的に測定が行えるほど利便性が良好であるとは言えない。
【0006】
上記方法2では、大がかりな装置は必要なく、利便性の面で優れている。しかし、上記椅子座り立ちテストでは、高齢のために普通の椅子を用いての立ち座りができない場合は、テストそのものを実施することができない。
また、しゃがみ姿勢から立ち姿勢に移行する際の当該被検者の足下荷重の変化に基づいた下肢筋力の評価方法では、足下荷重の変化に姿勢の要因も含まれてしまうので、筋力が低く十分なしゃがみ姿勢がとれない場合や、しゃがみ姿勢が人によってまちまちである場合には、精度良く測定できないおそれがある。さらに、上記方法2では、得られる測定結果が立ち座りの動作を行うに当たって十分な筋力であるのかどうか、といった明確な評価を行うことが困難であるという問題も有している。
【0007】
本発明はこのような事情に鑑みてなされたものであり、利便性が良好でかつ下肢筋力を精度良く評価することができる下肢筋力評価方法、及びこれに用いる下肢筋力評価装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明は、被検者の下肢筋力を評価するための下肢筋力評価方法であって、前記被検者の動きを示すパラメータ値を取得するためのセンサを設置するセンサ設置ステップと、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値を前記センサによって取得するパラメータ値取得ステップと、取得した前記大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する算出ステップと、を含むことを特徴としている。
【0009】
上記のように構成された下肢筋力評価方法によれば、被検者が可能な限りしゃがんだ最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における大腿部のパラメータ値から股関節及び膝関節の関節モーメントの和の最大値を求め、この最大値と、起立するために必要な必要最小筋力を示す基準値とを用いて余裕度を算出するので、精度良く評価を行うことができる。
また、前記最大値に基づいて下肢筋力の余裕度を算出するので、余裕度を、被検者の最大しゃがみ姿勢の影響を含んだ値として得ることができる。このため、被検者ごとの筋力の相違によって最大しゃがみ姿勢に相違があったとしても、その最大しゃがみ姿勢の相違も含めた下肢筋力の余裕度として評価を行うことができる。
また、本発明によれば、慣性センサ等といった、被検者の動きを示すパラメータ値を取得することができるセンサを設置すれば、下肢筋力の余裕度を求めることができるので、下肢筋力の評価を利便性良く行うことができる。
【0010】
(2)前記パラメータ値取得ステップでは、起立姿勢の前記被検者が、前記最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における前記大腿部のパラメータ値を取得するものであることが好ましい。
この場合、起立姿勢から最大しゃがみ姿勢に姿勢変化するときの被検者の股関節及び膝関節の関節モーメントの和の相対変化を把握することができ、当該被検者の起立姿勢を基準とした最大しゃがみ姿勢の状態を把握することができる。
【0011】
(3)また、前記算出ステップにおいて、下記式に基づいて、前記下肢筋力の余裕度を求めるものであることが好ましい。
【0012】
【数1】
【0013】
上記式中、Muscle_marginは、下肢筋力の余裕度、Thip+knee(t)は、股関節と膝関節の関節モーメントの和、max(Thip+knee(t))は、被検者がしゃがみ姿勢から起立姿勢に姿勢変化する間における股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。
【0014】
(4)さらに、前記算出ステップにおいて、下記式に基づいて、前記基準値Trefhip+kneeを、求めることが好ましい。
【0015】
【数2】
【0016】
上記式中、LThighは、大腿部の長手方向の長さ、kThighは、大腿部の長手方向における質量中心位置を示すパラメータ、BalRLは、床反力における左右バランスを示すパラメータ、mBodyは、被検者の全質量、mHATは、上半身部の質量、mThighは、大腿部セグメントの質量、gは、重力加速度である。
【0017】
上記式中、右辺より得られる値は、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeであり、被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す値である基準値Trefhip+kneeと一致する。
基準値Trefhip+kneeは、上記式から得られることで、時間に応じて変化しない定数として得ることができる。
【0018】
(5)上記下肢筋力評価方法において、前記センサは、前記大腿部のパラメータ値を取得するための大腿部センサを含み、前記センサ設置ステップにおいて、前記大腿部センサを前記被検者に固定するものであることが好ましい。
この場合、大腿部センサを被検者に固定するといった簡単な作業で、大腿部のパラメータ値を取得することができ、より利便性を高めることができる。
【0019】
(6)(7)大腿部の質量中心の長手方向の位置は、最も太い部分の近傍に位置している。このため、前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の最も太い部分に固定されることが好ましい。
さらに、前記大腿部センサは、前記大腿部の外側面に固定されることが好ましい。一般に大腿部の外側面は、脂肪等が薄く、被検者ごとに安定した位置に固定することができるからである。
【0020】
また例えば、大腿部を一つのセグメントとして捉え、このセグメントの質量中心における動きを大腿部の動きとして求める場合、大腿部センサがそのセンサ位置で検知する大腿部のパラメータ値は、前記質量中心における値に補正する必要がある。
これに対して、上記の場合、大腿部センサを、大腿部の質量中心の近傍に固定できるとともに、被検者ごとに安定した位置に固定することができるので、上記補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0021】
(8)(9)前記センサは、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得するための上半身部センサを含み、前記センサ設置ステップにおいて、前記上半身部センサを前記被検者に固定し、前記算出ステップにおいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求めることもでき、さらに、前記上半身部センサは、前記上半身部において、背中側の腰部の最も前弯した部分に固定することが好ましい。
【0022】
この場合、股関節及び膝関節の関節モーメントの和の最大値を、大腿部のパラメータ値と前記上半身部のパラメータ値とに基づいて求めることで、より精度よく評価を行うことができる。
また、一般に、背中側は、脂肪等が薄く、上半身部センサを被検者の背中側に固定することで、被検者ごとに安定した位置に固定することができる。
さらに、上半身部をセグメントとして捉えたときの質量中心は、腰部の最も前弯した部分の近傍に存在している。よって、上半身部の質量中心に近い位置に上半身部センサを固定すれば、上半身部センサによる上半身部パラメータ値を上半身部の質量中心における値に補正する場合においても、その補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0023】
(10)また、前記被検者の身長を入力するステップをさらに備え、前記算出ステップにおいて、前記身長に基づいて、前記大腿部の長手方向の長さ、質量中心位置を示すパラメータ、前記被検者の全質量、上半身部の質量、及び大腿部の質量を推定してもよい。
この場合、下肢筋力の余裕度を求めるのに必要な定数を全て用意せずとも、文献等のデータや、その他の統計的なデータを用いれば、被検者の身長に応じて前記定数を推定することができ、評価精度を低下させることなく利便性を高めることができる。
【0024】
(11)また、本発明は、被検者の下肢筋力を評価するための下肢筋力評価装置であって、前記被検者の動きを示すパラメータ値を取得するためのセンサと、前記センサが取得した、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する演算部と、を備えていることを特徴としている。
【0025】
上記のように構成された下肢筋力評価装置によれば、上述したように、利便性が良好でかつ下肢筋力を精度良く評価することができる。
【0026】
(12)(13)前記センサは、前記大腿部に装着される装具に固定され、前記大腿部のパラメータ値を取得する大腿部センサを含んでいてもよい。
さらに、前記センサは、前記被検者の上半身部に装着される装具に固定され、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得する上半身部センサを含み、前記演算部が、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求めるものであってもよい。
【発明の効果】
【0027】
本発明の下肢筋力評価方法、及びこれに用いる下肢筋力評価装置によれば、利便性が良好でかつ下肢筋力を精度良く評価することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の第一の実施形態に係る下肢筋力評価装置の構成を示すブロック図である。
【図2】上半身部センサ及び大腿部センサを被検者に固定し設置した状態を示す図である。
【図3】本体部の一例を示す外観図である。
【図4】下肢筋力評価装置を用いた、下肢筋力の余裕度の演算、評価方法の手順を示すフローチャートである。
【図5】被検者に行わせる、姿勢変化動作の一例を示す図である。
【図6】被検者の各部をセグメントとして示した図である。
【図7】下肢筋力の余裕度の演算結果、評価結果出力の態様の一例であり、(a)は、本体部のディスプレイの表示を示しており、(b)は、下肢筋力の余裕度の演算結果をグラフで表した図である。
【図8】第一の実施形態の他の例において、大腿部センサを被検者に固定し設置した状態を示す図である。
【図9】本発明の第二の実施形態に係る下肢筋力評価装置のセンサを被検者Hに設置した状態を示す図である。
【図10】床反力センサが検知する被検者Hに作用する反力を模式的に示した図である。
【図11】第二の実施形態における慣性センサ設置のバリエーションを示す図である。
【図12】被検者が姿勢変化動作を行う際に当該被検者が載る台の一例を示す図である。
【発明を実施するための形態】
【0029】
〔第一の実施形態〕
〔全体構成について〕
次に、本発明の好ましい実施形態について添付図面を参照しながら説明する。図1は、本発明の第一の実施形態に係る下肢筋力評価装置の構成を示すブロック図である。
図1において、下肢筋力評価装置1は、被検者の上半身部に固定される上半身部センサ2と、被検者の大腿部に固定される大腿部センサ3と、本体部4とを備えている。
【0030】
図2は、上半身部センサ2及び大腿部センサ3を被検者に固定し設置した状態を示す図である。両センサ2,3は、慣性センサを内蔵しており、被検者Hの上半身部及び大腿部の動きを示すパラメータ値を取得する機能を有している。
【0031】
上半身部センサ2は、被検者Hの腰部に装着される装具である腰部ベルト5に固定されている。被検者Hが腰部ベルト5を自身の腰に装着することで、上半身部センサ2は、被検者Hの上半身部、腰部背中側の最も前弯した部分に固定、設置される。腰部ベルト5は、上半身部センサ2が被検者Hの背中側であって腰部の最も前弯した部分に位置するように装着されるのを容易とする形状に形成されている。腰部の最も前弯した部分の近傍に上半身部の質量中心が存在しているため、上記のように腰部ベルト5を装着することで、上半身部の質量中心に対して一定の位置関係となるとともに、上半身部の所定方向(例えば脊柱の方向)に対して一定の関係となる位置に上半身部センサ2を固定することができる。
【0032】
さらに、一般に背中側は脂肪等が薄いので、上半身部センサ2は、背中側に固定されることで、上半身部の質量中心の近傍に固定できるとともに、被検者Hごとに安定した位置に固定することができる。
【0033】
大腿部センサ3は、被検者Hの大腿部に装着される装具である大腿部ベルト6に固定されている。被検者Hが大腿部ベルト6を自身の一方側の大腿部に装着することで、大腿部センサ3は、被検者Hの一方側大腿部の最も太い部分の外側面の幅方向ほぼ中央に固定される。大腿部ベルト6は、伸縮性のあるゴム素材を用いて形成されており、大腿部を適度に緊迫した状態で装着される。大腿部は、通常、股間側から足先に向かって先細りの形状となっているので、適度に緊迫した状態で大腿部ベルト6を大腿部に装着可能とすることで、当該大腿部ベルト6が位置ずれしてしまうのを防止することができる。
【0034】
また、大腿部の最も太い部分の近傍に大腿部の質量中心が存在しているため、上記のように大腿部ベルト6を装着することで、大腿部の質量中心の近傍に大腿部センサ3を固定できる。さらに、大腿部の質量中心に対して一定の位置関係となるとともに、大腿部の長手方向に対しても一定の関係となる位置に大腿部センサ3を固定することができる。
また、一般に大腿部の外側面は脂肪等が薄いので、大腿部センサ3は、大腿部の外側面に固定されることで、被検者Hごとに安定した位置に固定することができる。
【0035】
また、被検者Hの上半身部及び大腿部は、後述するようにそれぞれセグメントとして捉えられ、その質量中心における動きを示すパラメータが求められる。このとき、両センサ2,3がそのセンサの位置で検知する検知結果は、各セグメントの質量中心における値に補正する必要がある。
この点、本実施形態では、両センサ2,3を、それぞれの部位の質量中心に対して一定の位置関係でかつ質量中心の近傍に固定するとともに、被検者Hごとに安定した位置に固定することができるので、上記補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0036】
図1に戻って、上半身部センサ2及び大腿部センサ3は、それぞれ、慣性センサとして、加速度センサ部21,31、及び、角速度センサ部22,32を備えている。また、上半身部センサ2及び大腿部センサ3は、各センサ部21,22,31,32が出力する検知結果を示す出力信号を、本体部4に対して無線送信する送信制御部23,33を備えている。
【0037】
加速度センサ部21,31は、例えば、2軸の加速度センサによって構成されており、被検者Hの上半身部及び大腿部の動き(及び姿勢)を2軸方向の加速度として検知して送信制御部23,33に出力する機能を有している。
また、角速度センサ部22,32は、角速度センサによって構成されており、被検者の上半身部及び大腿部の動き(及び姿勢)を角速度として検知して送信制御部23,33に出力する機能を有している。
【0038】
なお、各センサ部21,22,31,32は、被検者Hに対する上半身部センサ2及び大腿部センサ3の固定位置に対して必要な方向の加速度及び角速度が検知できるように設けられている。
【0039】
以上のように、上半身部センサ2は、被検者Hの上半身部の動きを示す上半身部のパラメータ値として、被検者Hの背中側腰部における2軸の加速度と角速度を検知し、その検知結果を本体部4に無線送信によって出力する。また、大腿部センサ3も同様、被検者Hの大腿部の動きを示す大腿部のパラメータ値として、被検者Hの大腿部の最も太い部分の外側面における2軸の加速度と角速度を検知し、その検知結果を本体部4に無線送信によって出力する。
【0040】
また、両センサ2,3は、図示しない電源スイッチをON状態に操作すると、検知を開始し、検知結果である加速度及び角速度を示す信号の送信を開始する。
【0041】
本体部4は、両センサ2,3から送信される無線信号を受信する受信部41と、入力スイッチや、キーボードやマウス等からなる入力部42と、ディスプレイ等からなる出力部43と、システムプログラムや各種情報を記憶するためのメモリ等からなる記憶部44と、受信部41及び入力部42から得られる各種データに基づいてデータ処理を行うデータ処理部45とを備えている。
【0042】
受信部41は、両センサ2,3から検知結果を示す信号として送信される無線信号を受信し、受信信号をデータ処理部45に対して出力する。
記憶部44には、後述する下肢筋力の余裕度を算出するためのプログラムがインストールされており、このプログラムによって、下肢筋力の余裕度の算出、評価処理を行う機能部が実現されている。
【0043】
図3は、本体部4の一例を示す外観図である。本体部4は、各部を収納した筐体51の外側面に、本装置の電源をON又はOFFするための電源ボタン52、被検者Hの身長を入力するための入力ボタン53、測定の開始を入力するための測定開始ボタン54、及び、演算結果を表示するためのディスプレイ55が設けられている。
【0044】
上記入力ボタン53、及び測定開始ボタン54は、入力部42(図1)を構成しており、ディスプレイ55は、出力部43(図1)を構成している。
つまり、被検者Hが入力ボタン53を用いて自身の身長を入力することで、データ処理部45は、被検者Hの身長に関する情報を取得することができる。また、データ処理部45は、被検者Hが測定の開始を測定開始ボタン54を用いて入力することで、データ処理部45は、測定開始のタイミングを認識することができる。
測定が終わると、データ処理部45は、ディスプレイ55に演算、評価結果を表示する。これにより、データ処理部45は、被検者Hに対して演算、評価結果を認識させることができる。
【0045】
また、本体部4は、外部のコンピュータ等に接続するためのインターフェースを備えており(図示せず)、外部のコンピュータを介して制御可能とされている。よって、この場合、外部コンピュータのキーボードやマウスが入力部42を構成し、外部コンピュータのディスプレイやプリンタが出力部43を構成する。
【0046】
図1に戻って、データ処理部45は、本体部4が有する各部の動作を包括的に制御する制御部45aと、下肢筋力の余裕度を算出する機能を有する演算部45bとを備えている。このデータ処理部45の機能については、後に詳述する。
【0047】
〔下肢筋力の余裕度の算出、評価方法について〕
図4は、上記下肢筋力評価装置1を用いた、下肢筋力の余裕度の算出、評価方法の手順を示すフローチャートである。
下肢筋力の余裕度の算出、評価を行うには、まず、下肢筋力評価装置1の上半身部センサ2が固定された腰部ベルト5と、大腿部センサ3が固定された大腿部ベルト6とを被検者Hに装着することで、両センサ2,3を被検者Hに固定し設置する(ステップS1)。
【0048】
このとき、上半身部センサ2が被検者Hの背中側であって腰部の最も前弯した部分に位置するように、腰部ベルト5を被検者Hに装着する。
また、大腿部センサ3が被検者Hの一方側大腿部の最も太い部分の外側面の幅方向ほぼ中央に位置するように、大腿部ベルト6を被検者Hに装着する。
これによって、両センサ2,3は、それぞれ上半身部の質量中心及び大腿部の質量中心に対して一定の位置関係となるように固定される。
【0049】
さらに、両センサ2,3を被検者Hに設置した後、両センサ2,3の電源スイッチ(図示せず)をON状態にする。これにより、両センサ2,3は、それぞれの検知結果である、各部の動きを示すパラメータ値としての加速度及び角速度を示す信号の送信を開始する。
【0050】
次いで、下肢筋力評価装置1電源スイッチをON状態とし、本体部4に設けられた入力ボタン53を操作して、被検者Hの身長等の設定値を入力する(ステップS2)。
入力ボタン53の操作によって、被検者Hの身長が入力されると、本体部4の制御部45a(図1)は、入力された値を記憶部44(図1)に記憶する。
なお、被検者Hの身長が入力されなかったとしても、制御部45aは処理を続行する。この場合、制御部45aは、予め記憶部44に記憶されている、下肢筋力の余裕度を算出する上で標準的な被検者Hの身長を読み込み、これを用いて処理を行う。
【0051】
被検者Hの身長を入力した後、測定開始ボタン54を操作することで、制御部45aは、受信部41が受信した受信信号から得られる、両センサ2,3の検知結果である加速度と角速度(被検者Hの動きを示すパラメータ値)の取得を開始する(ステップS3)。
【0052】
次いで、両センサ2,3を固定、設置した被検者Hに、姿勢変化動作を行わせる(ステップS4)。図5は、被検者Hに行わせる、姿勢変化動作の一例を示す図である。
図5に示すように、まず、初期の姿勢として、被検者Hに起立姿勢を取ってもらう。次に、この起立姿勢から、被検者Hにとっての最大限の深さでしゃがんでもらい、その姿勢(最大しゃがみ姿勢)で一旦停止してもらう。
その後、被検者Hに最大しゃがみ姿勢から全力で立ち上がってもらい、再度、起立姿勢を取ってもらう。
【0053】
被検者Hが上記の姿勢変化動作を行っている間、制御部45aは、両センサ2,3の検知結果である加速度と角速度の取得を継続して行う。なお、制御部45aは、両センサ2,3の検知結果である加速度と角速度を、所定のサンプリング時間に対応付けた離散値として取得し、随時記憶部44に記憶する。
【0054】
被検者Hが上記姿勢変化動作を終えたことで、再度、測定開始ボタン54が操作されると、制御部45aは、両センサ2,3の検知結果の取得を終了する(ステップS5)。
【0055】
制御部45aは、両センサ2,3の検知結果の取得を終了すると、下肢筋力の余裕度を算出するための演算を演算部45bに行わせる(ステップS6)。
【0056】
まず、演算部45bは、被検者Hの上半身部、大腿部、下腿部、及び足部をそれぞれセグメント(上半身部セグメント、大腿部セグメント、下腿部セグメント、及び足部セグメント)として捉えたときの、上半身部と大腿部を繋ぐ股関節の関節モーメント(股関節モーメント)と、大腿部と下腿部を繋ぐ膝関節の関節モーメント(膝関節モーメント)との和を求める。
【0057】
図6は、被検者Hの各部をセグメントとして示した図である。演算部45bは、被検者Hの各セグメントの動きを、図6中の紙面中に示すように被検者の前後方向をX座標、上下方向をY座標、左右方向をZ座標とした座標系の中で把握し、股関節と膝関節の関節モーメントの和Thip+knee(t)を、下記式(1)に基づいて求める。
【0058】
【数3】
【0059】
但し、式(1)中、Aは、下記式(2)によって表される。また、PHは、慣性座標系における上半身部セグメントの質量中心の並進加速度、PTは、慣性座標系における大腿部セグメントの質量中心の並進加速度であり、下記式(3),(4)によって表される。
【0060】
【数4】
【0061】
また、式(1)中、LThighは、大腿部セグメントの長手方向の長さ、kThighは、大腿部セグメントの長手方向における質量中心位置を示すパラメータ、θThigh(t)は、大腿部セグメントの角度であり、これら各パラメータは、それぞれ、図6のように表される。
さらに、式(1)中、BalRLは、床反力における左右バランスを示すパラメータ(本実施形態では、0.5に設定)、mBodyは、被検者Hの全質量、mHATは、上半身部セグメントの質量、mThighは、大腿部セグメントの質量、gは、重力加速度、tは、被検者Hが、起立姿勢から最大しゃがみ姿勢に移行し、さらに最大しゃがみ姿勢から再度起立姿勢に移行するまでの間の時間を示している。
式(2)中、radThighは、大腿部セグメントの慣性モーメントを求める際の回転半径をセグメントの長さで標準化した値である。
【0062】
【数5】
【0063】
なお、上記大腿部セグメントの角加速度は、(d2/dt2)θThigh(t)と示す場合がある。
【0064】
上記式(1)中、並進加速度PH、並進加速度PT、大腿部セグメントの角度θThigh(t)、大腿部セグメントの角加速度(d2/dt2)θThigh(t)は、両センサ2,3の検知結果から求められる、時間t(被検者Hの動作)に応じて変化する変数である。演算部45bが、両センサ2,3の検知結果からこれら変数を求めるための処理については、後に説明する。
一方、他のパラメータ(LThigh、kThigh、BalRL、mBody、mHAT、mThigh、radThigh、g)は、時間tに対して変化しない定数である。演算部45bは、これら定数の内、床反力における左右バランスを示すパラメータBalRL、については「0.5」を、重力加速度gについては「9.80665」を用いるように予め設定される。
【0065】
また、被検者Hの体格等に応じて変化する残りのパラメータ(LThigh、kThigh、mBody、mHAT、mThigh)について、演算部45bは、ステップS2で入力される被検者Hの身長に基づく推定値を用いる。
例えば、被検者Hの身長と、その身長に対応する各パラメータの推定値とが関連付けて登録されたデータベースを記憶部44に記憶しておけば、演算部45bは、入力された被検者Hの身長に応じた各パラメータの推定値を前記データベースを参照することにより取得することができる。なお、前記データベースに登録される各パラメータの推定値としては、研究成果として報告されている文献等に基づいたデータや、その他の統計的なデータに基づいて、身長に応じた各パラメータの値を推定したものを用いることができる。
【0066】
また、被検者Hの身長が入力されなかったとしても、上述のように、演算部45bは、予め記憶部44に記憶されている、下肢筋力の余裕度を算出する上で標準的な被検者Hの身長を読み込み、これを用いて各パラメータの推定値を取得する。
【0067】
演算部45bは、上記式(1)中、並進加速度PH、並進加速度PT、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)を、両センサ2,3の検知結果から求める。
【0068】
各センサ2,3の加速度センサ部21,31は、各センサ2,3が、被検者Hに固定されたときに、図6中、X−Y平面上における2軸の加速度を検知することができるように設けられている。
【0069】
演算部45bは、大腿部セグメントの角度θ(t)については、動作開始時のセグメント角度を初期値として、大腿部センサ3の検知結果に含まれる大腿部セグメントの角速度を時間tで積分して求める。また、動作開始時の初期値は、検知結果に含まれる大腿部セグメントの加速度の方向によって把握できる。つまり、セグメントが静止状態であれば、加速度センサ部は、重力のみを検知することとなるので、センサ部に対する重力の方向から、セグメントの相対的な角度を把握することができる。
【0070】
演算部45bは、大腿部セグメントの角加速度(d2/dt2)θThigh(t)については、大腿部センサ3の検知結果に含まれる大腿部セグメントの角速度((d/dt)θThigh(t))を時間tで微分することで求める。
【0071】
上半身部セグメントの質量中心の並進加速度PHについては、上半身部センサ2の検知結果に含まれる上半身部セグメントの加速度と、角速度を用いて求められる。
上半身部センサ2の検知結果である加速度は、加速度センサ部21の位置における加速度を、自身の座標系(センサ座標系)で示している。よって、上半身部セグメントの質量中心における加速度を求めるために、演算部45bは、検知結果である加速度を上半身部セグメントの質量中心における加速度に補正し、さらに、補正後の加速度を慣性座標系(図6に示す座標系)に座標変換する。これによって、上半身部セグメントの質量中心の並進加速度PHを求めることができる。
【0072】
検知結果である加速度を上半身部セグメントの質量中心における加速度に補正するために、演算部45bは、加速度センサ部21の位置と、上半身部セグメントの質量中心との間の相対的な位置関係と、検知結果に含まれる角速度とを用いて加速度のずれを算出して補正する。
【0073】
加速度センサ部21の位置と、上半身部セグメントの質量中心との間の相対的な位置関係は、実際に計測した値を用いることもできるが、本実施形態では、上述したように、上半身部の質量中心に対して一定の位置関係となる位置に上半身部センサ2を固定するので、前記位置関係を近似的に示すデータを予め記憶しておき、その記憶したデータを用いることができる。また、前記位置関係を示すデータは、被検者Hの身長に応じて若干変化する場合があるので、例えば、被検者Hの身長と、身長に対応して補正された前記位置関係を示すデータとが関連付けられたデータベースを記憶部44に記憶しておけば、演算部45bは、被検者Hの身長に応じた前記位置関係を示すデータをデータベースを参照することにより、より精度の高いデータを取得できる。
【0074】
また、被検者Hの身長が入力されなかったとしても、演算部45bは、予め記憶部44に記憶されている、下肢筋力の余裕度を演算する上で標準的な前記位置関係示すデータを読み込み取得するようにすることもできる。
【0075】
このように、本実施形態では、上半身部センサ2を適切に固定したので、補正に要する演算を規格化したり簡略化等することが容易となる。この結果、より利便性を高めることができる。
【0076】
さらに、加速度センサ部21は、上半身部セグメントに対して一定の位置関係で固定されるので、予め、センサ座標系から慣性座標系に座標変換するための変換行列を近似的に求めておいて、記憶部44に記憶しておくことができる。
演算部45bは、記憶部44に記憶された変換行列を用いて、センサ座標系である補正後の加速度を慣性座標系に変換する。
これにより、演算部45bは、並進加速度PHを求めることができる。
【0077】
演算部45bは、並進加速度PHと同様に、大腿部センサ3の検知結果に含まれる大腿部セグメントの加速度と、角速度について、補正、座標変換を行い、大腿部の質量中心の並進加速度PTを求める。
【0078】
以上のようにして、演算部45bは、被検者Hの身長、両センサ2,3の検知結果に基づいて上記各値を求め、股関節と膝関節の関節モーメントの和Thip+knee(t)を求める。
【0079】
次に、演算部45bは、図5で示した姿勢変化動作の間における股関節と膝関節の関節モーメントの和Thip+knee(t)の内の最大値を取得し、下記式(5)に基づいて、下肢筋力の余裕度を求める。
【0080】
【数6】
【0081】
上記式(5)中、Muscle_marginは、下肢筋力の余裕度、max(Thip+knee(t))は、股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。この基準値Trefhip+kneeは、下記式(6)で表される。
【0082】
【数7】
【0083】
上記式(6)中、右辺より得られる値は、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeであり、被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す値である基準値Trefhip+kneeと一致する。
【0084】
すなわち、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+knee(基準値Trefhip+knee)以上の値を姿勢変化動作で発揮できる筋力が、被検者Hにある場合には、その被検者Hは、大腿部が水平となるよりも深くしゃがんだしゃがみ姿勢からでも起立可能な筋力を有していると評価することができる。
つまり、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+knee(基準値Trefhip+knee)よりも、測定により得られる股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が大きければ、その被検者Hには、しゃがみ姿勢から立ち上がることが可能な筋力があると評価できる。
なお、基準値Trefhip+kneeは、上記式(6)から得られることで、時間に応じて変化しない定数として得ることができる。
【0085】
本実施形態の演算部45bは、大腿部が水平となるしゃがみ姿勢を維持したときの股関節と膝関節の関節モーメントの和Thip+kneeを基準値Trefhip+kneeとした上で、被検者Hによる姿勢変化の間の測定(検知結果)によって得られた被検者Hの股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が、基準値Trefhip+kneeに対してどの程度の割合かを百分率で算出し、これを下肢筋力の余裕度として出力する。従って、基準値Trefhip+kneeに対して、関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が大きく、立ち上がるための筋力が大きい場合には、余裕度は、100%を超える値となる。逆に、関節モーメントの和Thip+knee(t)の最大値max(Thip+knee(t))が基準値Trefhip+kneeよりも小さく、立ち上がるための筋力が小さい場合には、余裕度は、100を下回る値となる。
【0086】
演算部45bが、下肢筋力の余裕度を算出すると、制御部45aは、その下肢筋力の余裕度の値から、下肢筋力の余裕度のレベル評価を行う。制御部45aは、例えば、下肢筋力の余裕度のレベルをその値に応じて、「高」、「中」、「低」の3段階で評価を行う。
【0087】
図4に戻って、次に、制御部45aは、下肢筋力の余裕度の数値と、評価レベルとをディスプレイ55に表示することで、演算結果、評価結果の出力を行い(ステップS7)、処理を終える。
【0088】
図7は、下肢筋力の余裕度の算出結果、評価結果出力の態様の一例であり、(a)は、本体部4のディスプレイ55の表示を示している。
図7(a)では、下肢筋力の余裕度の数値が「186%」、評価レベルが「中」である場合を示している。このように、下肢筋力評価装置1は、演算、評価結果を被検者Hに対して出力する。
【0089】
また、図7(b)は、下肢筋力の余裕度の演算結果をグラフで表した図である。
図7(b)中のグラフは、横軸が時間tであり、縦軸がモーメントを示している。図中の線図は、被検者Hが起立姿勢から最大しゃがみ姿勢に移行し、さらに最大しゃがみ姿勢から全力で立ち上がることで起立姿勢となる一連の動作の間の演算結果を示している。
【0090】
図中、実線で示している線図Iは、股関節と膝関節の関節モーメントの和Thip+knee(t)(以下、単に関節モーメントの和Thip+knee(t)ともいう)を示している。図中、紙面左側の関節モーメントの和Thip+knee(t)が比較的低い値の範囲では、被検者Hは起立姿勢である。被検者Hが起立姿勢からしゃがみ姿勢に姿勢変化の動作を開始すると、関節モーメントの和Thip+knee(t)は、序々に増加し、最大しゃがみ姿勢となるところでほぼ一定の値に維持される。
その後、被検者Hが全力で立ち上がると、関節モーメントの和Thip+knee(t)は、急激に上昇して最大値を採り、起立姿勢に至ると急激に低下する。そして、起立姿勢の維持によって、再度、低い値で安定する。
【0091】
ここで、基準値Trefhip+kneeは、図7(b)のグラフ中、破線Rで示される。よって、下肢筋力の余裕度は、この破線Rよりも関節モーメントの和の最大値max(Thip+knee(t))が大きくなると、100%以上となる。
【0092】
図中、破線で示している線図IIは、上記式(1)中の並進加速度PH、PTといった加速度に関わる値の合計値を示す値であり、被検者Hの動作の機敏さを示している。また、一点鎖線で示している線図IIIは、上記式(1)中の「g」を含む項の合計値を示す値であり、被検者Hが、どの程度の深さでしゃがんでいるかといったしゃがみ度合を示している。また、二点鎖線で示している線図IVは、上記式(1)中、「rad」を含む項を示す値であり、図6中のZ軸方向の成分を示している。よって、線図IVは、被検者Hの起立姿勢からしゃがみ姿勢から起立姿勢への姿勢変化においては、ほとんど変化がない。
つまり、線図Iは、線図II、III、IVを合計した線図となっており、関節モーメントの和の最大値max(Thip+knee(t))は、被検者Hのしゃがみ度合に基づく値と、被検者Hの起立動作の機敏さに基づく値とを合計した値となっており、被検者の最大しゃがみ姿勢の影響を含む値として得ることができる。
【0093】
図7(b)に示すグラフは、比較的年齢の若い下肢筋力の余裕がある被検者Hの演算結果を示しているが、ここで、仮に、下肢筋力が低く、最大しゃがみ姿勢が、大腿部が水平状態にまで到達できない程度に浅い場合、線図IIIの値が低い値となり、関節モーメントの和Thip+knee(t)も基準値Trefhip+kneeに到達しない比較的低い値となる。
この場合においても、その状態から起立姿勢に姿勢変化することで、関節モーメントの和の最大値max(Thip+knee(t))を取得することができる。
このとき、関節モーメントの和Thip+knee(t)は、比較的低い値として現れている最大しゃがみ姿勢での値から、起立姿勢を取ることで上昇を開始し、最大値max(Thip+knee(t))に達するので、この最大値max(Thip+knee(t))は、最大しゃがみ姿勢における関節モーメントの和Thip+knee(t)の影響も含んでおり、被検者Hの最大しゃがみ姿勢の影響を含む値として得ることができる。
【0094】
〔本方法の効果について〕
上記のように構成された下肢筋力を評価する方法では、被検者Hの動きを示すパラメータ値を取得するための上半身部センサ2及び大腿部センサ3を設置するセンサ設置ステップ(ステップS1)と、被検者Hが可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、被検者Hの上半身部及び大腿部の動きを示す加速度及び角速度(上半身部のパラメータ値、大腿部のパラメータ値)を上半身部センサ2及び大腿部センサ3によって取得するパラメータ値取得ステップ(ステップS3〜S5)と、取得した上半身部及び大腿部の加速度及び角速度から、被検者Hの股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、前記最大値と、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値Trefhip+kneeとに基づいて下肢筋力の余裕度を算出する算出ステップ(ステップS6)とを備えている。
【0095】
上記の下肢筋力を評価する方法によれば、被検者Hが最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における被検者Hの大腿部及び上半身部の加速度と角速度から股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を求め、この最大値と、起立するために必要な必要最小筋力を示す基準値基準値Trefhip+kneeとを用いて余裕度を算出するので、精度良く評価を行うことができる。
また、関節モーメントの和の最大値max(Thip+knee(t))に基づいて下肢筋力の余裕度を算出するので、余裕度を、被検者Hの最大しゃがみ姿勢の影響を含んだ値として得ることができる。このため、被検者Hごとの筋力の相違によって最大しゃがみ姿勢に相違があったとしても、その最大しゃがみ姿勢の相違も含めた下肢筋力の余裕度として評価を行うことができる。
【0096】
また、本実施形態の演算部45bは、大腿部を水平状態にしてしゃがみ姿勢を維持(静的な状態)したときの股関節と膝関節の関節モーメントの和Thip+kneeを、被検者Hがしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値(基準値Trefhip+knee)として採用し、下肢筋力の余裕度を求める。これにより、基準値Trefhip+kneeを、時間に応じて変化しない定数として得ることができるので(式(6)参照)、より安定した精度で下肢筋力の余裕度を算出することができる。
【0097】
また、本実施形態では、加速度センサ部21,31や、角速度センサ部22,32等の慣性センサといった、被検者Hの動きを示すパラメータ値を取得することができるセンサを設置して、上記下肢筋力の余裕度を求めるので、利便性良く評価を行うことができる。
【0098】
また、本実施形態のステップS1では、上記のように、上半身部センサ2及び大腿部センサ3を被検者Hに固定するので、簡単な作業で、大腿部センサ3を固定し大腿部の動きを示すパラメータ値を取得することができ、利便性を高めることができる。
【0099】
また、本実施形態の演算部45bは、股関節及び膝関節の関節モーメントの和の最大値max(Thip+knee(t))を、大腿部の加速度及び角速度と、上半身部の加速度及び角速度とに基づいて求めるので、より精度よく評価を行うことができる。
この点、大腿部センサ3の検出結果である大腿部の加速度及び角速度のみで、下肢筋力の余裕度を求めることもできる。
【0100】
また、本実施形態では、ステップS2で被検者Hの身長を入力し、この身長に基づいて、被検者Hの大腿部の長手方向の長さLThigh、質量中心位置を示すパラメータkThigh、被検者Hの全質量mBody、上半身部の質量mHAT、及び大腿部の質量mThighを推定するので、下肢筋力の余裕度を求めるのに必要な定数を全て用意せずとも、文献等のデータや、その他の統計的なデータを用いて、被検者Hの身長に応じて前記定数を推定することができ、評価精度を低下させることなく利便性を高めることができる。
【0101】
また、本実施形態では、パラメータ値取得ステップであるステップS3〜S5において、起立姿勢の被検者Hが、最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における両センサ2,3の検知結果である加速度と角速度を取得するので、起立姿勢から最大しゃがみ姿勢に姿勢変化するときの被検者Hの股関節及び膝関節の関節モーメントの和Thip+knee(t)の相対変化を把握することができ、当該被検者Hの起立姿勢を基準とした最大しゃがみ姿勢の状態を把握することができる。
〔第一実施形態の変形例について〕
上記式(1)中、上半身部セグメントの並進加速度PHは、下記式(7)に示すように、大腿部セグメントの並進加速度PTを用いて表すことができる。
【0102】
【数8】
【0103】
上記式(7)中、LHATは、上半身部セグメントの長手方向の長さ、kHATは、上半身部セグメントの長手方向における質量中心位置を示すパラメータ、θHAT(t)は、上半身部セグメントの角度であり、これら各パラメータは、それぞれ、図6のように表される。
【0104】
ここで、演算部45bは、式(1)に式(7)を代入し、かつ、上半身部セグメントの角度θHAT(t)、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)に、大腿部セグメントの角度θThigh(t)、上半身部セグメントの角速度(d/dt)θThigh(t)、角加速度(d2/dt2)θThigh(t)に基づいて推定した推定値を用いることで、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0105】
演算部45bは、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)を推定する際、過去のデータに基づいた統計的情報や物理的制約条件を用いて推定する。
【0106】
上記のように、式(7)を代入した式(1)を用いることで、演算部45bは、大腿部センサ3の検出結果のみから得られる、大腿部セグメントの角度θThigh(t)、上半身部セグメントの角速度(d/dt)θThigh(t)、角加速度(d2/dt2)θThigh(t)に基づいて、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0107】
この場合、演算部45bは、大腿部センサ3の検出結果のみから、股関節と膝関節の関節モーメントの和Thip+knee(t)を求めることができるので、上半身部センサ2を被検者Hに設置する必要がない。
従って、演算部45bが上記式(7)を代入した式(1)を用いる場合には、大腿部センサ3のみを被検者Hの大腿部に設置すれば、下肢筋力の余裕度の評価を行うことができる。
この場合、被検者Hに大腿部センサ3を一つだけ設置すればよいので、さらに利便性を高めることができる。
【0108】
さらに、上記の場合、図8に示すように、大腿部センサ3を被検者Hが手で大腿部の前面側に押さえて固定すれば、図2で示したような大腿部ベルトといった、固定用の装具を用いることなく、被検者Hの大腿部に大腿部センサ3を固定し設置することができる。このため、大腿部への大腿部センサ3の着脱が容易となる。
【0109】
なお、この場合、図8(a)、(b)に示すように、被検者Hは、大腿部の前面側の幅方向ほぼ中央でかつ脚の付け根付近に、大腿部センサ3を押し付けて固定する。大腿部の長手方向の中央部付近に固定すると、被検者Hが起立する際に、腕が届かなくなり、大腿部センサ3を固定できなくなるからである。このとき、演算部45bは、大腿部センサ3が図8に示すような位置(脚の付け根付近)に設置されたときの大腿部の質量中心と大腿部センサ3との位置関係に応じた補正を行うように設定される。
【0110】
また、演算部45bは、上記式(7)中の上半身部セグメントの角度θHAT(t)、上半身部セグメントの角速度(d/dt)θHAT(t)、角加速度(d2/dt2)θHAT(t)を含む項を「0」とみなした下記式(8)を用いて上半身部セグメントの並進加速度PHを近似的に求めてもよい。
【0111】
【数9】
【0112】
さらに、演算部45bは、上記式(8)中の大腿部の角加速度(d2/dt2)θThigh(t)を「0」とみなした下記式(9)を用いて上半身部セグメントの並進加速度PHを近似的に求めてもよい。
【0113】
【数10】
【0114】
さらに、演算部45bは、上記式(1)中、項Aも「0」に近似して股関節及び膝関節の関節モーメントの和Thip+knee(t)を求めることができる。
【0115】
上記近似式を用いることで、演算部45bが行う演算量を抑制でき、より速やかに下肢筋力の余裕度の演算、評価を行うことができる。
【0116】
〔第二の実施形態〕
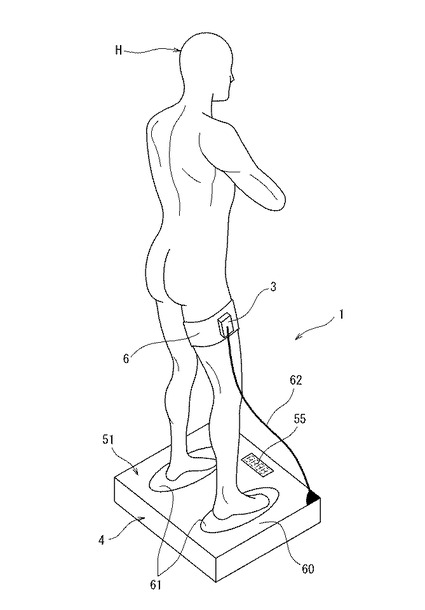
図9は、本発明の第二の実施形態に係る下肢筋力評価装置のセンサを被検者Hに設置した状態を示す図である。
本実施形態の下肢筋力評価装置1は、本体部4の筐体51の上面60に被検者Hが起立可能とされ、上面60に被検者Hに作用する床反力を検知するための床反力センサ61を備えている点で、上記第一実施形態と相違する。
【0117】
本実施形態において、下肢筋力評価装置1は、大腿部センサ3と、本体部4に設けられた床反力センサ61とによって、被検者Hの動きを示すパラメータ値を取得する。
本体部4には、上面60に床反力センサ61の他、演算、評価結果を表示するためのディスプレイ55が設けられている。
本実施形態では、大腿部センサ3は、本体部4に対して有線接続されており、通信線62を介して検知結果を出力する。
【0118】
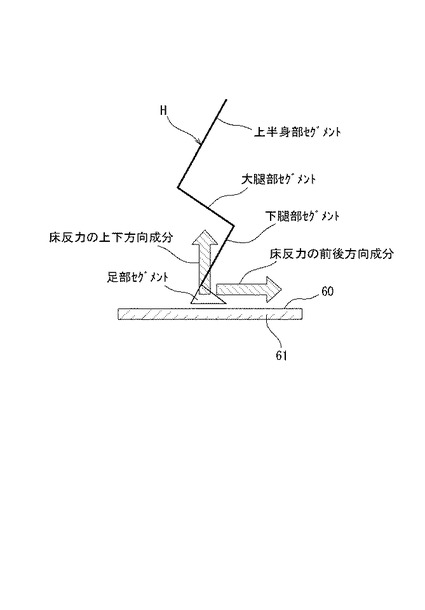
図10は、床反力センサ61が検知する被検者Hに作用する反力を模式的に示した図である。
本体部4の上面60に設けられた床反力センサ61は、図に示すように、被検者Hに作用する反力の内、上下方向成分と、前後方向成分とを検知する。床反力センサ61は、その検知結果をデータ処理部45(図1)に出力する。
【0119】
本実施形態の演算部45bは、図4中ステップS6において行う下肢筋力の余裕度を算出するための演算で用いる、股関節と膝関節との関節モーメントの和Thip+knee(t)を、下記式(10)に基づいて求める。
【0120】
【数11】
【0121】
上記式(10)中、Aは、上記式(2)によって表される。
PSは慣性座標系における下腿部セグメントの質量中心の並進加速度、PFは、慣性座標系における足部セグメントの質量中心の並進加速度であり、下記式(11),(12)によって表される。
【0122】
【数12】
【0123】
また、式(10)中、mShankは、下腿部セグメントの質量、mFootは、足部セグメントの質量を示している。
さらに、Rcop1_G(t)は、被検者Hに作用する床反力の前後成分を示している。また、Rcop2_G(t)は、被検者Hに作用する床反力の上下成分を示している。
【0124】
演算部45bは、上記式(10)中、前後成分床反力Rcop1_G(t)、上下成分床反力Rcop2_G(t)、並進加速度PT、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)を、両センサ3,61の検知結果から求める。
【0125】
前後成分床反力Rcop1_G(t)、及び、上下成分床反力Rcop2_G(t)は、床反力センサ61の出力を用いる。他の値は、上述の通り、大腿部センサ3の検知結果である大腿部の加速度と、角速度とに基づいて求められる。
また、式(10)中、下腿部セグメントの質量中心の並進加速度PS、及び、足部セグメントの質量中心の並進加速度PFは、被検者Hの下腿部及び足部に慣性センサを設置して検知することもできるが、本実施形態では、演算部45bは、下腿部セグメントの質量中心の並進加速度PS、及び、足部セグメントの質量中心の並進加速度PFを、「0」に近似した上で、股関節と膝関節との関節モーメントの和Thip+knee(t)を求める。
【0126】
演算部45bは、上記股関節と膝関節との関節モーメントの和Thip+knee(t)を用いて下肢筋力の余裕度を算出する。
【0127】
以上のように、本実施形態では、床反力センサ61と大腿部センサ3の検知結果を用いて股関節と膝関節との関節モーメントの和Thip+knee(t)を求めることができるので、被検者Hが本体部4の床反力センサ61上に起立し、大腿部センサ3を大腿部に固定した上で、起立姿勢からしゃがんで最大しゃがみ姿勢に移行し、さらに、最大しゃがみ姿勢から全力で立ち上がることで起立姿勢に移行すれば、下肢筋力の余裕度の算出、評価を行うことができる。
【0128】
本実施形態において、演算部45bが用いる上記式(10)には、前後成分床反力Rcop1_G(t)、上下成分床反力Rcop2_G(t)、時間t(被検者Hの動作)に応じて変化する変数として、並進加速度PT、並進加速度PS、並進加速度PF、大腿部セグメントの角度θThigh(t)、及び、大腿部セグメントの角加速度(d2/dt2)θThigh(t)が含まれている。
よって、上記変数を求めるための慣性センサを、被検者Hに設置すれば、当該被検者Hの動作をより精度よく把握でき、この結果、下肢筋力の余裕度の算出、評価も精度良く行うことができる。すなわち、大腿部セグメントの他、下腿部セグメント、足部セグメントに、慣性センサを固定し、各センサによる検知結果として得られる加速度、角速度を用いれば、より精度の高い演算、評価を行うことができる。
【0129】
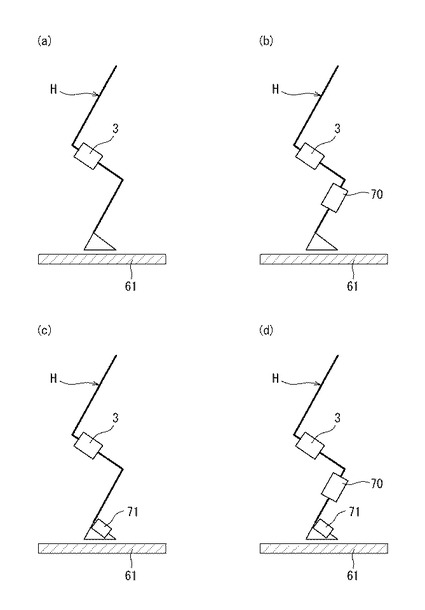
図11は、第二の実施形態における慣性センサ設置のバリエーションを示す図である。
図11(a)は、図9で示したものと同様の構成であり、大腿部センサ3と床反力センサ61とを用いたものを示している。
図11(b)は、(a)の構成に加えて、下腿部セグメントに慣性センサ70を固定した場合を示している。この例では、下腿部セグメントに固定された慣性センサ70の検知結果によって、並進加速度PSを求めることができる。
【0130】
また、図11(c)は、(a)の構成に加えて、足部セグメントに慣性センサ71を固定した場合を示している。この例では、足部セグメントに固定された慣性センサ71の検知結果によって、並進加速度PFを求めることができる。
【0131】
また、図11(d)は、(a)の構成に加えて、下腿部セグメントに慣性センサ70、
足部セグメントに慣性センサ71を固定した場合を示している。この例では、両慣性センサ70,71の検知結果によって、並進加速度PS、並進加速度PFを求めることができる。
【0132】
なお、上述したように、並進加速度PS、並進加速度PFは、「0」に近似することもできる。また、床反力センサ61により検知される前後成分床反力Rcop1_G(t)も、しゃがみ動作においては、「0」に近似できる。つまり、上下成分の床反力のみを検知できる床反力センサ61を用いたとしても、下肢筋力の余裕度の算出が可能である。
さらに、式(10)中、項Aも「0」に近似できる。
よって、本実施形態では、慣性センサの設置状況や、必要精度に応じて、いずれの変数の値を「0」に近似するかを選定し、下肢筋力の余裕度の算出、評価を行うことができる。
【0133】
〔その他の変形例〕
今回開示した実施形態はすべての点で例示であって制限的なものではない。
例えば、上記第一の実施形態では、上半身部センサ2、及び大腿部センサ3が、それぞれ、慣性センサとして、二軸の加速度センサ部21,31、及び角速度センサ部22,32を備えている場合を示したが、一のセンサが加速度センサ部と角速度センサ部を共に備える必要はない。つまり、加速度センサが検知する加速度に基づいて、当該センサの鉛直方向に対する傾き角度を求めることができる。センサが検知する重力の方向及びその大きさによって、そのセンサの座標系の鉛直方向に対する角度を求めることができるからである。
上記理由から、上記両センサ2,3が、二軸の加速度センサ部のみを備えて構成されていてもよい。
【0134】
また、両センサ2,3は、加速度センサ部21,31、及び角速度センサ部22,32に加えて、地磁気センサを備えていても良く、この場合、地磁気センサによる地磁気データを用いることで、角速度を積分したセグメントの角度データをより精度良く補正することができる。
【0135】
また、上記各実施形態では、加速度センサとして、二軸の加速度センサを用いた場合を例示したが、三軸の加速度センサを用いることもでき、この場合、立体的に被検者Hの動きを検知することができる。
なお、上述の慣性センサは、必要精度やコストに応じて適宜選定される。
【0136】
また、上記各実施形態において、上半身部センサ2を腰部背中側の最も前弯した部分に固定し、大腿部センサ3を大腿部の最も太い部分の外側面の幅方向ほぼ中央に固定した場合を例示したが、各センサ2,3の検知結果を各部位の質量中心の位置における値に補正すれば、上半身部センサ2を、例えば、被検者Hの胸部前面や、腹部前面に固定することができるし、大腿部センサ3を、大腿部の付け根や膝関節付近に固定することができる。
【0137】
本発明の下肢筋力評価方法では、ある程度の深さのしゃがみ姿勢を取ることができれば評価することができるが、足関節(足首)の柔軟性が低い被検者Hの場合、しゃがみ込むのが困難な場合があり、最大しゃがみ姿勢が評価可能な程度のしゃがみ込み深さに達しない場合も考えられる。
このような場合には、図12(a)に示すように、被検者Hの載る面につま先下がりのスロープが形成された踏み台75や、被検者Hのかかとを載せるためのかかと載せ台76を用いて、被検者Hに姿勢変化動作を行わせてもよい。
この場合、足関節の柔軟性が低いとしても、被検者Hは容易にしゃがみ姿勢を取ることができ、確実に下肢筋力の余裕度の算出、評価を行うことができる。
【0138】
また、上記第一の実施形態では、ステップS2(図4)において、設定値として被検者Hの身長の入力を求め、身長を用いて下肢筋力の余裕度の算出を行う場合を示したが、身長だけでなく、被検者Hの体重の入力も求め、身長に加えて体重も用いて下肢筋力の余裕度の算出を行ってもよい。この場合、上半身部の質量mHATや、大腿部の質量mThighの推定精度をより高めることができる。
【0139】
また、上記第二の実施形態で用いた床反力センサ61は、被検者Hが静止していれば、被検者Hの体重も測定することもできる。よって、この場合、床反力センサ61によって被検者Hの体重を取得してもよい。
【0140】
ここで、本発明の下肢筋力評価装置は、体粗成計や体重計と組み合わせることで、被検者Hの体重変化に応じた下肢筋力の余裕度の変化を示すこともできる。例えば、体重100kg、余裕度120%の被検者が、80kgまで体重が減少した場合の余裕度を試算し、当該被検者に出力することができる。この場合、被検者の体重が80kgまで減少すると、余裕度は、下記式(13)に示すように、150%と試算できる。
(100/80) × 120 = 150 ・・・(13)
【0141】
上記のような情報を被検者Hに提供することにより、リハビリテーションや、トレーニング等の方向性の示唆や、効果の確認等を行うことができる。
【符号の説明】
【0142】
1 下肢筋力評価装置
2 上半身部センサ
3 大腿部センサ
45 データ処理部(演算部)
【特許請求の範囲】
【請求項1】
被検者の下肢筋力を評価するための下肢筋力評価方法であって、
前記被検者の動きを示すパラメータ値を取得するためのセンサを設置するセンサ設置ステップと、
前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値を前記センサによって取得するパラメータ値取得ステップと、
取得した前記大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する算出ステップと、
を含むことを特徴とする下肢筋力評価方法。
【請求項2】
前記パラメータ値取得ステップでは、起立姿勢の前記被検者が、前記最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における前記大腿部のパラメータ値を取得する請求項1に記載の下肢筋力評価方法。
【請求項3】
前記算出ステップにおいて、下記式に基づいて、前記下肢筋力の余裕度を求める請求項1又は2に記載の下肢筋力評価方法。
【数13】
上記式中、Muscle_marginは、下肢筋力の余裕度、Thip+knee(t)は、股関節と膝関節の関節モーメントの和、max(Thip+knee(t))は、被検者がしゃがみ姿勢から起立姿勢に姿勢変化する間における股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。
【請求項4】
前記算出ステップにおいて、下記式に基づいて、前記基準値Trefhip+kneeを、求める請求項3に記載の下肢筋力評価方法。
【数14】
上記式中、LThighは、大腿部の長手方向の長さ、kThighは、大腿部の長手方向における質量中心位置を示すパラメータ、BalRLは、床反力における左右バランスを示すパラメータ、mBodyは、被検者の全質量、mHATは、上半身部の質量、mThighは、大腿部セグメントの質量、gは、重力加速度である。
【請求項5】
前記センサは、前記大腿部のパラメータ値を取得するための大腿部センサを含み、
前記センサ設置ステップにおいて、前記大腿部センサを前記被検者に固定する請求項1〜4のいずれか一項に記載の下肢筋力評価方法。
【請求項6】
前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の最も太い部分に固定される請求項1〜5のいずれか一項に記載の下肢筋力評価方法。
【請求項7】
前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の外側面に固定される請求項1〜6のいずれか一項に記載の下肢筋力評価方法。
【請求項8】
前記センサは、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得するための上半身部センサを含み、
前記センサ設置ステップにおいて、前記上半身部センサを前記被検者に固定し、
前記算出ステップにおいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求める請求項1〜7のいずれか一項に記載の下肢筋力評価方法。
【請求項9】
前記センサ設置ステップにおいて、前記上半身部センサは、前記上半身部において、背中側の腰部の最も前弯した部分に固定される請求項8に記載の下肢筋力評価方法。
【請求項10】
前記被検者の身長を入力するステップをさらに備え、
前記算出ステップにおいて、前記身長に基づいて、前記大腿部の長手方向の長さ、質量中心位置を示すパラメータ、前記被検者の全質量、上半身部の質量、及び大腿部の質量を推定する請求項4に記載の下肢筋力評価方法。
【請求項11】
被検者の下肢筋力を評価するための下肢筋力評価装置であって、
前記被検者の動きを示すパラメータ値を取得するためのセンサと、
前記センサが取得した、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する演算部と、
を備えていることを特徴とする下肢筋力評価装置。
【請求項12】
前記センサは、前記大腿部に装着される装具に固定され、前記大腿部のパラメータ値を取得する大腿部センサを含んでいる請求項11に記載の下肢筋力評価装置。
【請求項13】
前記センサは、前記被検者の上半身部に装着される装具に固定され、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得する上半身部センサを含み、
前記演算部が、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求める請求項11又は12のいずれか一項に記載の下肢筋力評価装置。
【請求項1】
被検者の下肢筋力を評価するための下肢筋力評価方法であって、
前記被検者の動きを示すパラメータ値を取得するためのセンサを設置するセンサ設置ステップと、
前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値を前記センサによって取得するパラメータ値取得ステップと、
取得した前記大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する算出ステップと、
を含むことを特徴とする下肢筋力評価方法。
【請求項2】
前記パラメータ値取得ステップでは、起立姿勢の前記被検者が、前記最大しゃがみ姿勢に姿勢を変え、さらに、最大しゃがみ姿勢から再度起立姿勢に姿勢変化するまでの間における前記大腿部のパラメータ値を取得する請求項1に記載の下肢筋力評価方法。
【請求項3】
前記算出ステップにおいて、下記式に基づいて、前記下肢筋力の余裕度を求める請求項1又は2に記載の下肢筋力評価方法。
【数13】
上記式中、Muscle_marginは、下肢筋力の余裕度、Thip+knee(t)は、股関節と膝関節の関節モーメントの和、max(Thip+knee(t))は、被検者がしゃがみ姿勢から起立姿勢に姿勢変化する間における股関節と膝関節の関節モーメントの和Thip+knee(t)の最大値、Trefhip+kneeは、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値である。
【請求項4】
前記算出ステップにおいて、下記式に基づいて、前記基準値Trefhip+kneeを、求める請求項3に記載の下肢筋力評価方法。
【数14】
上記式中、LThighは、大腿部の長手方向の長さ、kThighは、大腿部の長手方向における質量中心位置を示すパラメータ、BalRLは、床反力における左右バランスを示すパラメータ、mBodyは、被検者の全質量、mHATは、上半身部の質量、mThighは、大腿部セグメントの質量、gは、重力加速度である。
【請求項5】
前記センサは、前記大腿部のパラメータ値を取得するための大腿部センサを含み、
前記センサ設置ステップにおいて、前記大腿部センサを前記被検者に固定する請求項1〜4のいずれか一項に記載の下肢筋力評価方法。
【請求項6】
前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の最も太い部分に固定される請求項1〜5のいずれか一項に記載の下肢筋力評価方法。
【請求項7】
前記センサ設置ステップにおいて、前記大腿部センサは、前記大腿部の外側面に固定される請求項1〜6のいずれか一項に記載の下肢筋力評価方法。
【請求項8】
前記センサは、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得するための上半身部センサを含み、
前記センサ設置ステップにおいて、前記上半身部センサを前記被検者に固定し、
前記算出ステップにおいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求める請求項1〜7のいずれか一項に記載の下肢筋力評価方法。
【請求項9】
前記センサ設置ステップにおいて、前記上半身部センサは、前記上半身部において、背中側の腰部の最も前弯した部分に固定される請求項8に記載の下肢筋力評価方法。
【請求項10】
前記被検者の身長を入力するステップをさらに備え、
前記算出ステップにおいて、前記身長に基づいて、前記大腿部の長手方向の長さ、質量中心位置を示すパラメータ、前記被検者の全質量、上半身部の質量、及び大腿部の質量を推定する請求項4に記載の下肢筋力評価方法。
【請求項11】
被検者の下肢筋力を評価するための下肢筋力評価装置であって、
前記被検者の動きを示すパラメータ値を取得するためのセンサと、
前記センサが取得した、前記被検者が可能な限りしゃがんだ姿勢である最大しゃがみ姿勢から起立姿勢に姿勢変化するまでの間における、前記被検者の大腿部の動きを示す大腿部のパラメータ値に基づいて、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を求め、前記最大値と、前記被検者がしゃがみ姿勢から起立するために必要な必要最小筋力を示す基準値とに基づいて、下肢筋力の余裕度を算出する演算部と、
を備えていることを特徴とする下肢筋力評価装置。
【請求項12】
前記センサは、前記大腿部に装着される装具に固定され、前記大腿部のパラメータ値を取得する大腿部センサを含んでいる請求項11に記載の下肢筋力評価装置。
【請求項13】
前記センサは、前記被検者の上半身部に装着される装具に固定され、前記被検者の上半身部の動きを示す上半身部のパラメータ値を取得する上半身部センサを含み、
前記演算部が、前記被検者の股関節及び膝関節の関節モーメントの和の最大値を、前記大腿部のパラメータ値と前記上体部のパラメータ値とに基づいて求める請求項11又は12のいずれか一項に記載の下肢筋力評価装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−223452(P2012−223452A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−95334(P2011−95334)
【出願日】平成23年4月21日(2011.4.21)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月21日(2011.4.21)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
[ Back to top ]