
不整地走行車両の舵角センサ配置構造

【課題】 舵角センサのメンテナンスための取付け、取外しを容易に行えるようにする。
【解決手段】 ステアリングシャフト38の上部にハンドルを取付け、中間部にアクチュエータユニットとしてのパワーアシスト部83を設けた電動パワーステアリング装置24を備える不整地走行車両において、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86の下端部である先端部86bに舵角を検出する舵角センサ93を配置した。
【解決手段】 ステアリングシャフト38の上部にハンドルを取付け、中間部にアクチュエータユニットとしてのパワーアシスト部83を設けた電動パワーステアリング装置24を備える不整地走行車両において、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86の下端部である先端部86bに舵角を検出する舵角センサ93を配置した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、不整地走行車両の舵角センサ配置構造の改良に関するものである。
【背景技術】
【0002】
従来の不整地走行車両の舵角センサ配置構造として、電動パワーステアリング装置のギヤケースに、ステアリングシャフトの回転角度、即ち舵角を検出する舵角センサとしてのポテンショメータを備えるものが知られている(例えば、特許文献1参照。)。
【特許文献1】特開2004−231011公報
【0003】
特許文献1の図4に示される通り、ステアリングシャフト50は、上側シャフト50aと、下側シャフト50bと、これらの上側シャフト50a及び下側シャフト50bのそれぞれを連結するユニバーサルジョイント51とからなり、アッパパイプ18に取付けた上ブラケット53と前クロスパイプ23に取付けた下ブラケット54とで回転自在に支持したものである。
【0004】
下側シャフト50bは、下ブラケット54に取付けたギヤケース55を貫通する部材であり、ギヤケース55は、ステアリングシャフト50の回転角度及び回転速度を検出するポテンショメータ61を設けたものである。
【発明の開示】
【発明が解決しようとする課題】
【0005】
例えば、ポテンショメータ61が作動不良となって修理、あるいは交換が必要になった場合、ギヤケース55からポテンショメータ61が簡単に取外せない構造であるときには、アッパパイプ18及び前クロスパイプ23から電動パワーステアリング装置の全体を取外す、あるいは、前クロスパイプ23から下ブラケット54を取外してからギヤケース55を取外すことになる。これでは、ポテンショメータ61のメンテナンスが煩わしく、作業工数も多くなる。
【0006】
本発明の目的は、不整地走行車両の舵角センサ配置構造を改良することで、舵角センサのメンテナンスを容易に行えるようにすることにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、ステアリングシャフトの上部にハンドルを取付け、中間部にアクチュエータユニットを設けた電動パワーステアリング装置を備える不整地走行車両において、ステアリングシャフトの一端に舵角を検出する舵角センサを配置したことを特徴とする。
【0008】
舵角センサの点検、修理、交換等のメンテナンスを行う場合は、ステアリングシャフトの一端から舵角センサを取外し、メンテナンス後にステアリングシャフトの一端に配置する。ステアリングシャフトの一端は周囲に取付け、取外しの邪魔になるものが少なく、舵角センサの取付け、取外しが容易になる。
【0009】
請求項2に係る発明は、舵角センサを、ステアリングシャフトの先端にカップリングを介して取付けたことを特徴とする。
舵角センサの点検、修理、交換等のメンテナンスを行う場合は、ステアリングシャフトの先端からカップリングを取外し、場合によっては、舵角センサからカップリングを取外し、メンテナンス後にカップリング、舵角センサを元の状態のように取付ける。
【0010】
請求項3に係る発明は、舵角センサを、ステアリングシャフトを回転自在に支持する軸受の近傍に配置したことを特徴とする。
ステアリングシャフトを回転自在に支持する軸受は、例えば、車体フレームの剛性の高い部分に取付けてあるために振動し難く、このような振動し難い軸受の近傍に舵角センサを配置すれば、舵角センサの振動が抑えられる。
【0011】
請求項4に係る発明は、舵角センサに、ステアリングシャフトの回動に基づいて回動する回転軸と、この回転軸の外周を覆うハウジングとを備え、回転軸の外径を、ステアリングシャフトの外径よりも小さくしたことを特徴とする。
回転軸の外径が、ステアリングシャフトの外径よりも小さいため、舵角センサ自体が小型になる。
【発明の効果】
【0012】
請求項1に係る発明では、ステアリングシャフトの一端に舵角センサを配置したので、ステアリングシャフトの一端の周囲に邪魔なものが少ない場所での舵角センサの取付け、取外しが容易になり、舵角センサの交換等のメンテナンスを容易に行うことができる。
【0013】
請求項2に係る発明では、舵角センサをステアリングシャフトの先端にカップリングを介して取付けたので、例えば、ステアリングシャフトの一端の形状が車種に応じて異なっても、それに応じたカップリングを用いることで、車種に関係なく汎用の舵角センサを使用することができ、コスト低減を図ることができる。
【0014】
請求項3に係る発明では、舵角センサを、ステアリングシャフトを回転自在に支持する軸受の近傍に配置したので、振動し難い位置に舵角センサを配置することができる。従って、舵角センサの誤動作を防止することができ、舵角センサの性能をより長期に亘って維持することができる。
【0015】
請求項4に係る発明では、舵角センサに、回転軸とハウジングとを備え、回転軸の外径をステアリングシャフトの外径よりも小さくしたので、舵角センサ自体を小型にすることができ、例えば、舵角センサ内に、回転軸を支持する軸受を設ける場合に、軸受を小さくすることができる。
【発明を実施するための最良の形態】
【0016】
本発明を実施するための最良の形態を添付図に基づいて以下に説明する。なお、図面は符号の向きに見るものとする。
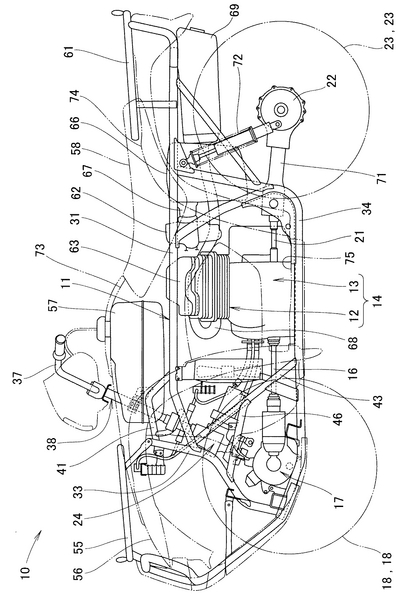
図1は本発明に係る電動パワーステアリング装置を備える不整地走行車両の側面図であり、不整地走行車両10は、車体フレーム11の中央部にエンジン12及び変速機13からなるパワーユニット14を搭載し、変速機13の前部にフロントプロペラシャフト16を介してフロント終減速装置17を連結し、このフロント終減速装置17に図示せぬドライブシャフトを介して左右の前輪18,18に連結し、変速機13の後部にリヤプロペラシャフト21を介してリヤ終減速装置22を連結し、このリヤ終減速装置22に図示せぬドライブシャフトを介して左右の後輪23,23を連結し、前輪18,18を操舵する操舵力を軽減する電動パワーステアリング装置24を備えた四輪駆動車である。
【0017】
車体フレーム11は、前後に延ばした左右一対のアッパメインフレーム31,32(手前側の符号31のみ示す。)と、これらのアッパメインフレーム31,32の前端にそれぞれ連結した正面視逆U字形状のフロントフレーム33と、このフロントフレーム33の下端及びアッパメインフレーム31,32の中間部のそれぞれに連結した左右一対のロアメインフレーム34,36(手前側の符号34のみ示す。)と、上端にハンドル37を取付けたステアリングシャフト38の上部を回転自在に支持するためにフロントフレーム33の上端及びアッパメインフレーム31,32のそれぞれに連結した左右一対のくの字形状のフロントアッパフレーム41,42(手前側の符号41のみ示す。)と、アッパメインフレーム31,32の前端から後下がりにロアメインフレーム34,36に連結した左右一対の傾斜フレーム43,44(手前側の符号43のみ示す。)と、これらの傾斜フレーム43,44の中間部及びフロントフレーム33のそれぞれに渡して連結することで電動パワーステアリング装置24の下部を支持する左右一対のサブ傾斜フレーム46,47(手前側の符号46のみ示す。)とを備える。
【0018】
ここで、55はフロントキャリア、56は前輪18の上方及び後方を覆うフロントフェンダ、57は燃料タンク、58はシート、61はリヤキャリア、62はエンジン12のシリンダヘッド63の後部側に連結したキャブレタ、66はキャブレタ62にコネクティングチューブ67を介して連結したエアクリーナ、68はシリンダヘッド63の前部から車両後方に延ばした排気管、69は排気管68の後端に接続した消音器、71はロアメインフレーム34,36側に対して後輪23,23をスイング自在に支持するスイングアーム、72,72(手前側の符号72のみ示す。)はスイングアーム71とアッパメインフレーム31,32側とに渡して取付けた左右一対のリヤクッションユニット、73はパワーユニット14の側方に配置したボディサイドカバー、74は後輪23の前方及び上方を覆うリヤフェンダ、75はステップフロアである。
【0019】
図2は本発明に係る不整地走行車両の要部側面図(図中の矢印(FRONT)は車両前方を表す。以下同じ。)であり、電動パワーステアリング装置24は、前輪を操舵するためのステアリング装置81と、操舵トルクを検出するトルクセンサ部82と、操舵力を補助する動力を発生させるパワーアシスト部83と、トルクセンサ部82によって検出した操舵トルク等に基づいてパワーアシスト部83を制御する制御部84とからなる。
【0020】
ステアリング装置81は、ハンドル37(図1参照)と、このハンドル37を支持するインプットシャフト85と、このインプットシャフト85にトルクセンサ部82を介して連結したアウトプットシャフト86と、このアウトプットシャフト86の下端部に取付けたステアリングアーム87と、このステアリングアーム87に取付けた左右一対のボールジョイント88,88(手前側の符号88のみ示す。)と、これらのボールジョイント88,88にそれぞれ一端を連結するとともに他端を前輪18(図1参照)側のナックル(不図示)に連結する左右一対のタイロッド(不図示)とからなり、上記のインプットシャフト85とアウトプットシャフト86とは、ステアリングシャフト38を構成する部材である。
【0021】
インプットシャフト85は、2箇所で支持した部材であり、一方の支持は上部軸受部90で行い、他方の支持は、上部軸受部90の下方に位置する中間軸受部91で行う。
上部軸受部90は、左右のフロントアッパフレーム41,42(手前側の符号41のみ示す。)に渡した支持ブラケット92に2本のカラー95,95(手前側の符号95のみ示す。)を介してボルト99,99(手前側の符号99のみ示す。)で取付けたものであり、インプットシャフト85を回転自在に支持するラジアルベアリング(滑り軸受)90aと、このラジアルベアリング90aを挟んで保持する一対のベアリング保持部材90b,90cとからなる。
【0022】
中間軸受部91は、サブアッパフレーム89,89(手前側の符号89のみ示す。)に取付けた中間ベアリング支持ブラケット(不図示)で支持したものである。
サブアッパフレーム89,89は、フロントアッパフレーム41,42とアッパメインフレーム31,32(手前側の符号31のみ示す。)とにそれぞれ渡した部材である。
【0023】
アウトプットシャフト86は、先端に舵角(即ち、ステアリングシャフト38の回転角度である。)を検出する舵角センサ93を設けた部材であり、舵角センサ93は、サブ傾斜フレーム46,47(手前側の符号46のみ示す。)にブラケット94を介して取付けたものである。
【0024】
トルクセンサ部82は、インプットシャフト85側とアウトプットシャフト86側との間にトーションバー(不図示)を設けたものである。
ハンドル37(図1参照)の操作によりインプットシャフト85を回転させると、インプットシャフト85とアウトプットシャフト86との間に相対回転角が生じ、トーションバーが捩られる。この捩れ量をトルクに変換することで操舵トルクが求まる。なお、トルクセンサ部82は、トーションバーの捩れ量によりトルクを検出する代わりに、歪みセンサ(不図示)によりトルクを検出することもできる。
【0025】
パワーアシスト部83は、電動モータ96と、この電動モータ96の出力軸及びアウトプットシャフト86のそれぞれの間に介在させたクラッチ(不図示)及び減速機(不図示。ウォームギヤ及びウォームホイールからなる。)とで構成した部分である。
【0026】
電動モータ96は、前端部側(アウトプットシャフト86側)をサブ傾斜フレーム46,47に設けたモータブラケット97,97(手前側の符号97のみ示す。)に取付け、後端部側を左右の傾斜フレーム43,44(手前側の符号43のみ示す。)に渡して取付けたモータ支持部材98で支持したものである。
【0027】
制御部84は、トルクセンサ部82により検出された操舵トルク、舵角センサ93により検出された舵角、不整地走行車両10(図1参照)の車速等に基づいてパワーアシスト部83を制御するものであり、この制御部84を、左右のフロントアッパフレーム41,42の車体内側に配置し、フロントフレーム33に沿って配線した導線139で舵角センサ93と電気的に接続した。
【0028】
図3は本発明に係るアウトプットシャフト下端支持部の近傍に配置した舵角センサを説明する断面図であり、アウトプットシャフト86を回転自在に支持するアウトプットシャフト軸受け部140は、サブ傾斜フレーム46,47で支持したボトムプレート141の中央部に取付けた軸支持部材142と、アウトプットシャフト86を回転自在に支持するために軸支持部材142に取付けたベアリング143と、このベアリング143をダスト等から保護するためのシール部材144,145とからなる。なお、147は軸支持部材142からのベアリング143の抜け止めを行う止め輪である。
【0029】
軸支持部材142は、前部にアウトプットシャフト86にほぼ沿って下側に突出する下方突出部142aを形成したものであり、ハンドルを切ってアウトプットシャフト86を所定角度回転させたときに、下方突出部142aにステアリングアーム87に設けた側方突出部(不図示)が当たり、アウトプットシャフト86の回転角度範囲が規制される。上記した下方突出部142aは、アウトプットシャフト86の回転角度範囲を規制するストッパとなる。
【0030】
ステアリングアーム87は、アウトプットシャフト86の端部に止め輪151で取付けた部材であり、このステアリングアーム87の内周面に形成しためすスプライン87aをアウトプットシャフト86の下端部に形成したおすスプライン86aとスプライン結合したものである。
【0031】
ボールジョイント88は、端部に設けたボルト部88aをステアリングアーム87の後部にナット152で取付けた部材である。
舵角センサ93は、ブラケット94で支持したハウジング155と、このハウジング155内に取付けた複数の検出部156と、これらの検出部156で検出するためにアウトプットシャフト86の先端部86bの外周面に取付けた複数の被検出部157と、ハウジング155の開口を塞ぐとともにアウトプットシャフト86を貫通させたカバー部材158と、このカバー部材158とアウトプットシャフト86との間をシールするシール部材161とからなる。
【0032】
このように、アウトプットシャフト86の先端部86bで、舵角センサ93の被検出部157を支持する検出軸を兼ねることで、舵角センサ93を簡素な構造とすることができ、舵角センサ93のコストを低減することができる。
【0033】
舵角センサ93を、点検、修理、交換等のメンテナンスのために取外すには、まず、ハウジング155にカバー部材158を取付けるビス(不図示)を外し、次に、ブラケット94にハウジング155を止めているボルト(不図示)を外せばよい。
このように、アウトプットシャフト86の一端に舵角センサ93を配置したことで、舵角センサ93を簡単に取外す、又は取付けることができる。
【0034】
図中の165はアッパアーム支持ブラケットであり、図2に示したアッパアーム支持ブラケット166と共にサブ傾斜フレーム46に取付けることで前輪用サスペンションを構成するアッパアーム(不図示)を上下スイング自在に支持する部材である。
上記のアッパアーム支持ブラケット165を舵角センサ93の外側方に配置することで、舵角センサ93の側方を覆って保護することができる。
【0035】
以上の図2及び図3で示したように、本発明は、ステアリングシャフト38の上部にハンドル37(図1参照)を取付け、中間部にアクチュエータユニットとしてのパワーアシスト部83を設けた電動パワーステアリング装置24を備える不整地走行車両10(図1参照)において、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86の下端部である先端部86bに舵角を検出する舵角センサ93を配置したことを特徴とする。
【0036】
ステアリングシャフト38の一端に舵角センサ93を配置したので、アウトプットシャフト86の先端部86bという周囲に邪魔なものが少ない箇所への舵角センサ93の取付け、取外しが容易になり、舵角センサ93の交換等のメンテナンスを容易に行うことができる。
【0037】
本発明は、図3に示したように、舵角センサ93を、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86を回転自在に支持する軸受としてのベアリング143の近傍に配置したことを特徴とする。
【0038】
舵角センサ93をベアリング143の近傍に配置したので、振動し難い位置に舵角センサ93を配置することができる。従って、舵角センサ93の誤動作を防止することができ、舵角センサ93の性能をより長期に亘って維持することができる。
【0039】
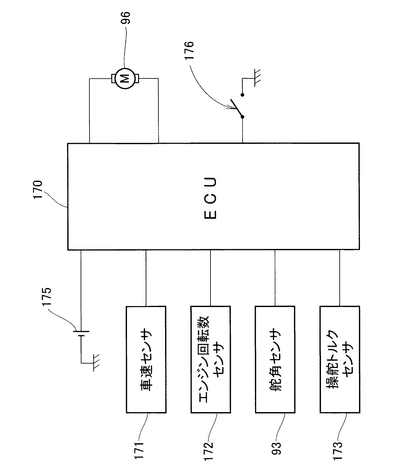
図4は本発明に係る電動パワステアリング装置の制御部を示すブロック図であり、電動パワステアリング装置を構成する制御部84、即ち、ECU(エンジンコントロールユニット)170は、車速を検出する車速センサ171、エンジンの回転数を検出するエンジン回転数センサ172、ステアリングシャフト38(図2参照)の舵角を検出する舵角センサ93、トルクセンサ部82(図2参照)のうちの操舵トルクを検出する操舵トルクセンサ173からの各信号に基づいて電動モータ96を制御する。なお、175はECU170の電源、176は緊急時にECU170の作動を停止させるエマージャンシースイッチである。
【0040】
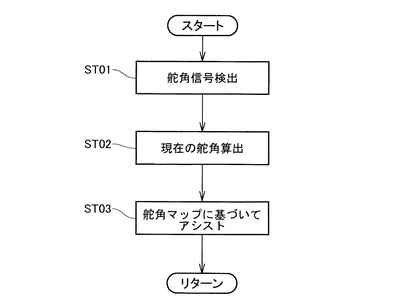
図5は本発明に係る電動パワーステアリング装置の制御部の制御フローを示すフローチャートであり、図中のSTXXはステップ番号を表す。(符号については図4参照)
ST01…舵角センサ93からの舵角信号を検出する。
ST02…舵角信号に基づいて現在の舵角を算出する。
ST03…舵角マップに基づいて電動モータ96でアシスト力を発生させる制御を行う。
舵角マップについては、図6で詳細を説明する。
【0041】
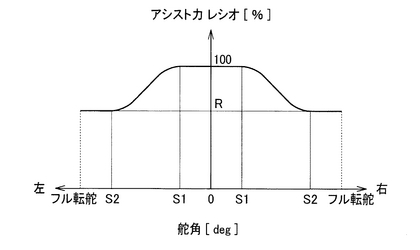
図6は本発明に係る電動パワーステアリング装置の制御に用いる舵角マップを示すグラフであり、縦軸は電動モータ96(図4参照)によるアシスト力のレシオ(単位は%)、横軸は舵角(単位はdeg)を表す。電動モータ96によるアシスト力のレシオは、電動モータ96によるアシスト力を、操舵トルクセンサ173(図4参照)で検出した操舵トルクを力に換算した値で除したものである。
図6においては、右又は左の舵角が小さいうちは、レシオは100%、即ち、電動モータ96によるアシスト力が、操舵トルクセンサ173で検出した操舵トルクの力に換算した値に等しくなり、舵角がS1になると、レシオは次第に小さくなり、舵角がS2に近づいてS2以上になると、レシオはR%一定となる。
【0042】
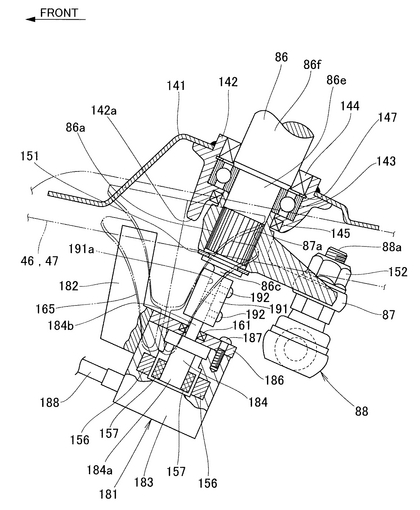
図7は本発明に係る舵角センサの別実施形態を説明する断面図であり、図3に示した実施形態と同一構成については同一符号を付け、詳細説明は省略する。
舵角センサ181は、サブ傾斜フレーム46,47に取付けたブラケット182で支持したハウジング183と、このハウジング183内に取付けた複数の検出部156と、ハウジング183内に回転自在に挿入した回転軸184と、この回転軸184の先端部184aの外周面に取付けた複数の被検出部157と、ハウジング183の開口を塞ぐとともに回転軸184を貫通させたカバー部材186と、このカバー部材186と回転軸184との間をシールするシール部材161と、ハウジング183にカバー部材186を取付けるための複数のビス187と、検出部156の検出信号を制御部84(図2参照)等に接続するために外部に取出す導線188とからなり、回転軸184の他端部184bをカップリング191を介してアウトプットシャフト86の細軸とした先端部86cに連結したものである。
【0043】
上記の回転軸184の外径(例えば、先端部184aの外径や他端部184bの外径)は、ステアリングシャフト38(図2参照)を構成するアウトプットシャフト86の外径(例えば、ベアリング143で支持される被支持部86eの外径やこの被支持部86eの上部に形成した大径部86fの外径)よりも小さい。
【0044】
カップリング191は、嵌合穴191aに挿入した回転軸184の他端部184b及びアウトプットシャフト86の先端部86cをそれぞれビス192で止めて、他端部184bと先端部86cとを連結する構造とした部材である。
【0045】
このように、舵角センサ181をカップリング191を介してアウトプットシャフト86の一端に連結することで、例えば、上記の先端部86cと外径と異なる外径の先端部を有するアウトプットシャフトに舵角センサ181を連結する場合は、カップリング191をその先端部に合うカップリングに交換すればよく、舵角センサ181の汎用性を高めることができる。
【0046】
舵角センサ181をメンテナンスのために取外すには、まず、ビス187を外してハウジング183からカバー部材186を外した状態にし、次に、ブラケット182にハウジング183を止めているボルト(不図示)を外せばよい。
このように、アウトプットシャフト86の一端に舵角センサ181を配置したことで、舵角センサ181を簡単に取外す、又は取付けることができる。
【0047】
本発明は、図7に示したように、舵角センサ181を、ステアリングシャフト38の先端、詳しくは、アウトプットシャフト86の下端部である先端部86cにカップリング191を介して取付けたことを特徴とする。
【0048】
舵角センサ181をアウトプットシャフト86の先端部86cにカップリング191を介して取付けたので、例えば、アウトプットシャフト86の先端部86cの外径等の形状が車種に応じて異なっても、それに応じたカップリングを用いることで、車種に関係なく汎用の舵角センサ181を使用することができ、コスト低減を図ることができる。
【0049】
また本発明は、舵角センサ181に、アウトプットシャフト86の回動に基づいて回動する回転軸184と、この回転軸184の外周を覆うハウジング183とを備え、回転軸184の外径(例えば、先端部184aの外径や他端部184bの外径)を、アウトプットシャフト86の外径(例えば、被支持部86eの外径や大径部86fの外径)よりも小さくしたことを特徴とする。
【0050】
舵角センサ181に、回転軸184とハウジング183とを備え、回転軸184の外径をアウトプットシャフト86の外径よりも小さくしたので、舵角センサ181自体を小型にすることができ、例えば、舵角センサ181内に、回転軸184を支持する軸受を設ける場合に、軸受を小さくすることができる。
【0051】
尚、本実施形態では、図2及び図3に示したように、舵角センサ93をステアリングシャフト38の下端に配置したが、これに限らず、舵角センサ93をステアリングシャフト38の上端に配置してもよい。ステアリングシャフト38の上端は、図1に示したように、ハンドル37を取付けているだけであるから、大きなスペースで舵角センサ93の取付け、取外しを容易に行うことができる。
【0052】
また、図7において、アウトプットシャフト86の先端部86cの外周面に被検出部を設けることもできる。この場合、構成部品を少なくしながらも、舵角センサ181を小さくすることができる。
【産業上の利用可能性】
【0053】
本発明は、電動パワーステアリング装置を備える不整地走行車両等の四輪車に好適である。
【図面の簡単な説明】
【0054】
【図1】本発明に係る電動パワーステアリング装置を備える不整地走行車両の側面図である。
【図2】本発明に係る不整地走行車両の要部側面図である。
【図3】本発明に係るアウトプットシャフト下端支持部の近傍に配置した舵角センサを説明する断面図である。
【図4】本発明に係る電動パワステアリング装置の制御部を示すブロック図である。
【図5】本発明に係る電動パワーステアリング装置の制御部の制御フローを示すフローチャートである。
【図6】本発明に係る電動パワーステアリング装置の制御に用いる舵角マップを示すグラフである。
【図7】本発明に係る舵角センサの別実施形態を説明する断面図である。
【符号の説明】
【0055】
10…不整地走行車両、24…電動パワーステアリング装置、37…ハンドル、38…ステアリングシャフト、83…アクチュエータユニット(パワーアシスト部)、86…アウトプットシャフト、86b,86c…ステアリングシャフトの一端(先端部)、93,181…舵角センサ、143…軸受(ベアリング)、183…ハウジング、184…回転軸、191…カップリング。
【技術分野】
【0001】
本発明は、不整地走行車両の舵角センサ配置構造の改良に関するものである。
【背景技術】
【0002】
従来の不整地走行車両の舵角センサ配置構造として、電動パワーステアリング装置のギヤケースに、ステアリングシャフトの回転角度、即ち舵角を検出する舵角センサとしてのポテンショメータを備えるものが知られている(例えば、特許文献1参照。)。
【特許文献1】特開2004−231011公報
【0003】
特許文献1の図4に示される通り、ステアリングシャフト50は、上側シャフト50aと、下側シャフト50bと、これらの上側シャフト50a及び下側シャフト50bのそれぞれを連結するユニバーサルジョイント51とからなり、アッパパイプ18に取付けた上ブラケット53と前クロスパイプ23に取付けた下ブラケット54とで回転自在に支持したものである。
【0004】
下側シャフト50bは、下ブラケット54に取付けたギヤケース55を貫通する部材であり、ギヤケース55は、ステアリングシャフト50の回転角度及び回転速度を検出するポテンショメータ61を設けたものである。
【発明の開示】
【発明が解決しようとする課題】
【0005】
例えば、ポテンショメータ61が作動不良となって修理、あるいは交換が必要になった場合、ギヤケース55からポテンショメータ61が簡単に取外せない構造であるときには、アッパパイプ18及び前クロスパイプ23から電動パワーステアリング装置の全体を取外す、あるいは、前クロスパイプ23から下ブラケット54を取外してからギヤケース55を取外すことになる。これでは、ポテンショメータ61のメンテナンスが煩わしく、作業工数も多くなる。
【0006】
本発明の目的は、不整地走行車両の舵角センサ配置構造を改良することで、舵角センサのメンテナンスを容易に行えるようにすることにある。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、ステアリングシャフトの上部にハンドルを取付け、中間部にアクチュエータユニットを設けた電動パワーステアリング装置を備える不整地走行車両において、ステアリングシャフトの一端に舵角を検出する舵角センサを配置したことを特徴とする。
【0008】
舵角センサの点検、修理、交換等のメンテナンスを行う場合は、ステアリングシャフトの一端から舵角センサを取外し、メンテナンス後にステアリングシャフトの一端に配置する。ステアリングシャフトの一端は周囲に取付け、取外しの邪魔になるものが少なく、舵角センサの取付け、取外しが容易になる。
【0009】
請求項2に係る発明は、舵角センサを、ステアリングシャフトの先端にカップリングを介して取付けたことを特徴とする。
舵角センサの点検、修理、交換等のメンテナンスを行う場合は、ステアリングシャフトの先端からカップリングを取外し、場合によっては、舵角センサからカップリングを取外し、メンテナンス後にカップリング、舵角センサを元の状態のように取付ける。
【0010】
請求項3に係る発明は、舵角センサを、ステアリングシャフトを回転自在に支持する軸受の近傍に配置したことを特徴とする。
ステアリングシャフトを回転自在に支持する軸受は、例えば、車体フレームの剛性の高い部分に取付けてあるために振動し難く、このような振動し難い軸受の近傍に舵角センサを配置すれば、舵角センサの振動が抑えられる。
【0011】
請求項4に係る発明は、舵角センサに、ステアリングシャフトの回動に基づいて回動する回転軸と、この回転軸の外周を覆うハウジングとを備え、回転軸の外径を、ステアリングシャフトの外径よりも小さくしたことを特徴とする。
回転軸の外径が、ステアリングシャフトの外径よりも小さいため、舵角センサ自体が小型になる。
【発明の効果】
【0012】
請求項1に係る発明では、ステアリングシャフトの一端に舵角センサを配置したので、ステアリングシャフトの一端の周囲に邪魔なものが少ない場所での舵角センサの取付け、取外しが容易になり、舵角センサの交換等のメンテナンスを容易に行うことができる。
【0013】
請求項2に係る発明では、舵角センサをステアリングシャフトの先端にカップリングを介して取付けたので、例えば、ステアリングシャフトの一端の形状が車種に応じて異なっても、それに応じたカップリングを用いることで、車種に関係なく汎用の舵角センサを使用することができ、コスト低減を図ることができる。
【0014】
請求項3に係る発明では、舵角センサを、ステアリングシャフトを回転自在に支持する軸受の近傍に配置したので、振動し難い位置に舵角センサを配置することができる。従って、舵角センサの誤動作を防止することができ、舵角センサの性能をより長期に亘って維持することができる。
【0015】
請求項4に係る発明では、舵角センサに、回転軸とハウジングとを備え、回転軸の外径をステアリングシャフトの外径よりも小さくしたので、舵角センサ自体を小型にすることができ、例えば、舵角センサ内に、回転軸を支持する軸受を設ける場合に、軸受を小さくすることができる。
【発明を実施するための最良の形態】
【0016】
本発明を実施するための最良の形態を添付図に基づいて以下に説明する。なお、図面は符号の向きに見るものとする。
図1は本発明に係る電動パワーステアリング装置を備える不整地走行車両の側面図であり、不整地走行車両10は、車体フレーム11の中央部にエンジン12及び変速機13からなるパワーユニット14を搭載し、変速機13の前部にフロントプロペラシャフト16を介してフロント終減速装置17を連結し、このフロント終減速装置17に図示せぬドライブシャフトを介して左右の前輪18,18に連結し、変速機13の後部にリヤプロペラシャフト21を介してリヤ終減速装置22を連結し、このリヤ終減速装置22に図示せぬドライブシャフトを介して左右の後輪23,23を連結し、前輪18,18を操舵する操舵力を軽減する電動パワーステアリング装置24を備えた四輪駆動車である。
【0017】
車体フレーム11は、前後に延ばした左右一対のアッパメインフレーム31,32(手前側の符号31のみ示す。)と、これらのアッパメインフレーム31,32の前端にそれぞれ連結した正面視逆U字形状のフロントフレーム33と、このフロントフレーム33の下端及びアッパメインフレーム31,32の中間部のそれぞれに連結した左右一対のロアメインフレーム34,36(手前側の符号34のみ示す。)と、上端にハンドル37を取付けたステアリングシャフト38の上部を回転自在に支持するためにフロントフレーム33の上端及びアッパメインフレーム31,32のそれぞれに連結した左右一対のくの字形状のフロントアッパフレーム41,42(手前側の符号41のみ示す。)と、アッパメインフレーム31,32の前端から後下がりにロアメインフレーム34,36に連結した左右一対の傾斜フレーム43,44(手前側の符号43のみ示す。)と、これらの傾斜フレーム43,44の中間部及びフロントフレーム33のそれぞれに渡して連結することで電動パワーステアリング装置24の下部を支持する左右一対のサブ傾斜フレーム46,47(手前側の符号46のみ示す。)とを備える。
【0018】
ここで、55はフロントキャリア、56は前輪18の上方及び後方を覆うフロントフェンダ、57は燃料タンク、58はシート、61はリヤキャリア、62はエンジン12のシリンダヘッド63の後部側に連結したキャブレタ、66はキャブレタ62にコネクティングチューブ67を介して連結したエアクリーナ、68はシリンダヘッド63の前部から車両後方に延ばした排気管、69は排気管68の後端に接続した消音器、71はロアメインフレーム34,36側に対して後輪23,23をスイング自在に支持するスイングアーム、72,72(手前側の符号72のみ示す。)はスイングアーム71とアッパメインフレーム31,32側とに渡して取付けた左右一対のリヤクッションユニット、73はパワーユニット14の側方に配置したボディサイドカバー、74は後輪23の前方及び上方を覆うリヤフェンダ、75はステップフロアである。
【0019】
図2は本発明に係る不整地走行車両の要部側面図(図中の矢印(FRONT)は車両前方を表す。以下同じ。)であり、電動パワーステアリング装置24は、前輪を操舵するためのステアリング装置81と、操舵トルクを検出するトルクセンサ部82と、操舵力を補助する動力を発生させるパワーアシスト部83と、トルクセンサ部82によって検出した操舵トルク等に基づいてパワーアシスト部83を制御する制御部84とからなる。
【0020】
ステアリング装置81は、ハンドル37(図1参照)と、このハンドル37を支持するインプットシャフト85と、このインプットシャフト85にトルクセンサ部82を介して連結したアウトプットシャフト86と、このアウトプットシャフト86の下端部に取付けたステアリングアーム87と、このステアリングアーム87に取付けた左右一対のボールジョイント88,88(手前側の符号88のみ示す。)と、これらのボールジョイント88,88にそれぞれ一端を連結するとともに他端を前輪18(図1参照)側のナックル(不図示)に連結する左右一対のタイロッド(不図示)とからなり、上記のインプットシャフト85とアウトプットシャフト86とは、ステアリングシャフト38を構成する部材である。
【0021】
インプットシャフト85は、2箇所で支持した部材であり、一方の支持は上部軸受部90で行い、他方の支持は、上部軸受部90の下方に位置する中間軸受部91で行う。
上部軸受部90は、左右のフロントアッパフレーム41,42(手前側の符号41のみ示す。)に渡した支持ブラケット92に2本のカラー95,95(手前側の符号95のみ示す。)を介してボルト99,99(手前側の符号99のみ示す。)で取付けたものであり、インプットシャフト85を回転自在に支持するラジアルベアリング(滑り軸受)90aと、このラジアルベアリング90aを挟んで保持する一対のベアリング保持部材90b,90cとからなる。
【0022】
中間軸受部91は、サブアッパフレーム89,89(手前側の符号89のみ示す。)に取付けた中間ベアリング支持ブラケット(不図示)で支持したものである。
サブアッパフレーム89,89は、フロントアッパフレーム41,42とアッパメインフレーム31,32(手前側の符号31のみ示す。)とにそれぞれ渡した部材である。
【0023】
アウトプットシャフト86は、先端に舵角(即ち、ステアリングシャフト38の回転角度である。)を検出する舵角センサ93を設けた部材であり、舵角センサ93は、サブ傾斜フレーム46,47(手前側の符号46のみ示す。)にブラケット94を介して取付けたものである。
【0024】
トルクセンサ部82は、インプットシャフト85側とアウトプットシャフト86側との間にトーションバー(不図示)を設けたものである。
ハンドル37(図1参照)の操作によりインプットシャフト85を回転させると、インプットシャフト85とアウトプットシャフト86との間に相対回転角が生じ、トーションバーが捩られる。この捩れ量をトルクに変換することで操舵トルクが求まる。なお、トルクセンサ部82は、トーションバーの捩れ量によりトルクを検出する代わりに、歪みセンサ(不図示)によりトルクを検出することもできる。
【0025】
パワーアシスト部83は、電動モータ96と、この電動モータ96の出力軸及びアウトプットシャフト86のそれぞれの間に介在させたクラッチ(不図示)及び減速機(不図示。ウォームギヤ及びウォームホイールからなる。)とで構成した部分である。
【0026】
電動モータ96は、前端部側(アウトプットシャフト86側)をサブ傾斜フレーム46,47に設けたモータブラケット97,97(手前側の符号97のみ示す。)に取付け、後端部側を左右の傾斜フレーム43,44(手前側の符号43のみ示す。)に渡して取付けたモータ支持部材98で支持したものである。
【0027】
制御部84は、トルクセンサ部82により検出された操舵トルク、舵角センサ93により検出された舵角、不整地走行車両10(図1参照)の車速等に基づいてパワーアシスト部83を制御するものであり、この制御部84を、左右のフロントアッパフレーム41,42の車体内側に配置し、フロントフレーム33に沿って配線した導線139で舵角センサ93と電気的に接続した。
【0028】
図3は本発明に係るアウトプットシャフト下端支持部の近傍に配置した舵角センサを説明する断面図であり、アウトプットシャフト86を回転自在に支持するアウトプットシャフト軸受け部140は、サブ傾斜フレーム46,47で支持したボトムプレート141の中央部に取付けた軸支持部材142と、アウトプットシャフト86を回転自在に支持するために軸支持部材142に取付けたベアリング143と、このベアリング143をダスト等から保護するためのシール部材144,145とからなる。なお、147は軸支持部材142からのベアリング143の抜け止めを行う止め輪である。
【0029】
軸支持部材142は、前部にアウトプットシャフト86にほぼ沿って下側に突出する下方突出部142aを形成したものであり、ハンドルを切ってアウトプットシャフト86を所定角度回転させたときに、下方突出部142aにステアリングアーム87に設けた側方突出部(不図示)が当たり、アウトプットシャフト86の回転角度範囲が規制される。上記した下方突出部142aは、アウトプットシャフト86の回転角度範囲を規制するストッパとなる。
【0030】
ステアリングアーム87は、アウトプットシャフト86の端部に止め輪151で取付けた部材であり、このステアリングアーム87の内周面に形成しためすスプライン87aをアウトプットシャフト86の下端部に形成したおすスプライン86aとスプライン結合したものである。
【0031】
ボールジョイント88は、端部に設けたボルト部88aをステアリングアーム87の後部にナット152で取付けた部材である。
舵角センサ93は、ブラケット94で支持したハウジング155と、このハウジング155内に取付けた複数の検出部156と、これらの検出部156で検出するためにアウトプットシャフト86の先端部86bの外周面に取付けた複数の被検出部157と、ハウジング155の開口を塞ぐとともにアウトプットシャフト86を貫通させたカバー部材158と、このカバー部材158とアウトプットシャフト86との間をシールするシール部材161とからなる。
【0032】
このように、アウトプットシャフト86の先端部86bで、舵角センサ93の被検出部157を支持する検出軸を兼ねることで、舵角センサ93を簡素な構造とすることができ、舵角センサ93のコストを低減することができる。
【0033】
舵角センサ93を、点検、修理、交換等のメンテナンスのために取外すには、まず、ハウジング155にカバー部材158を取付けるビス(不図示)を外し、次に、ブラケット94にハウジング155を止めているボルト(不図示)を外せばよい。
このように、アウトプットシャフト86の一端に舵角センサ93を配置したことで、舵角センサ93を簡単に取外す、又は取付けることができる。
【0034】
図中の165はアッパアーム支持ブラケットであり、図2に示したアッパアーム支持ブラケット166と共にサブ傾斜フレーム46に取付けることで前輪用サスペンションを構成するアッパアーム(不図示)を上下スイング自在に支持する部材である。
上記のアッパアーム支持ブラケット165を舵角センサ93の外側方に配置することで、舵角センサ93の側方を覆って保護することができる。
【0035】
以上の図2及び図3で示したように、本発明は、ステアリングシャフト38の上部にハンドル37(図1参照)を取付け、中間部にアクチュエータユニットとしてのパワーアシスト部83を設けた電動パワーステアリング装置24を備える不整地走行車両10(図1参照)において、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86の下端部である先端部86bに舵角を検出する舵角センサ93を配置したことを特徴とする。
【0036】
ステアリングシャフト38の一端に舵角センサ93を配置したので、アウトプットシャフト86の先端部86bという周囲に邪魔なものが少ない箇所への舵角センサ93の取付け、取外しが容易になり、舵角センサ93の交換等のメンテナンスを容易に行うことができる。
【0037】
本発明は、図3に示したように、舵角センサ93を、ステアリングシャフト38の一端、詳しくは、アウトプットシャフト86を回転自在に支持する軸受としてのベアリング143の近傍に配置したことを特徴とする。
【0038】
舵角センサ93をベアリング143の近傍に配置したので、振動し難い位置に舵角センサ93を配置することができる。従って、舵角センサ93の誤動作を防止することができ、舵角センサ93の性能をより長期に亘って維持することができる。
【0039】
図4は本発明に係る電動パワステアリング装置の制御部を示すブロック図であり、電動パワステアリング装置を構成する制御部84、即ち、ECU(エンジンコントロールユニット)170は、車速を検出する車速センサ171、エンジンの回転数を検出するエンジン回転数センサ172、ステアリングシャフト38(図2参照)の舵角を検出する舵角センサ93、トルクセンサ部82(図2参照)のうちの操舵トルクを検出する操舵トルクセンサ173からの各信号に基づいて電動モータ96を制御する。なお、175はECU170の電源、176は緊急時にECU170の作動を停止させるエマージャンシースイッチである。
【0040】
図5は本発明に係る電動パワーステアリング装置の制御部の制御フローを示すフローチャートであり、図中のSTXXはステップ番号を表す。(符号については図4参照)
ST01…舵角センサ93からの舵角信号を検出する。
ST02…舵角信号に基づいて現在の舵角を算出する。
ST03…舵角マップに基づいて電動モータ96でアシスト力を発生させる制御を行う。
舵角マップについては、図6で詳細を説明する。
【0041】
図6は本発明に係る電動パワーステアリング装置の制御に用いる舵角マップを示すグラフであり、縦軸は電動モータ96(図4参照)によるアシスト力のレシオ(単位は%)、横軸は舵角(単位はdeg)を表す。電動モータ96によるアシスト力のレシオは、電動モータ96によるアシスト力を、操舵トルクセンサ173(図4参照)で検出した操舵トルクを力に換算した値で除したものである。
図6においては、右又は左の舵角が小さいうちは、レシオは100%、即ち、電動モータ96によるアシスト力が、操舵トルクセンサ173で検出した操舵トルクの力に換算した値に等しくなり、舵角がS1になると、レシオは次第に小さくなり、舵角がS2に近づいてS2以上になると、レシオはR%一定となる。
【0042】
図7は本発明に係る舵角センサの別実施形態を説明する断面図であり、図3に示した実施形態と同一構成については同一符号を付け、詳細説明は省略する。
舵角センサ181は、サブ傾斜フレーム46,47に取付けたブラケット182で支持したハウジング183と、このハウジング183内に取付けた複数の検出部156と、ハウジング183内に回転自在に挿入した回転軸184と、この回転軸184の先端部184aの外周面に取付けた複数の被検出部157と、ハウジング183の開口を塞ぐとともに回転軸184を貫通させたカバー部材186と、このカバー部材186と回転軸184との間をシールするシール部材161と、ハウジング183にカバー部材186を取付けるための複数のビス187と、検出部156の検出信号を制御部84(図2参照)等に接続するために外部に取出す導線188とからなり、回転軸184の他端部184bをカップリング191を介してアウトプットシャフト86の細軸とした先端部86cに連結したものである。
【0043】
上記の回転軸184の外径(例えば、先端部184aの外径や他端部184bの外径)は、ステアリングシャフト38(図2参照)を構成するアウトプットシャフト86の外径(例えば、ベアリング143で支持される被支持部86eの外径やこの被支持部86eの上部に形成した大径部86fの外径)よりも小さい。
【0044】
カップリング191は、嵌合穴191aに挿入した回転軸184の他端部184b及びアウトプットシャフト86の先端部86cをそれぞれビス192で止めて、他端部184bと先端部86cとを連結する構造とした部材である。
【0045】
このように、舵角センサ181をカップリング191を介してアウトプットシャフト86の一端に連結することで、例えば、上記の先端部86cと外径と異なる外径の先端部を有するアウトプットシャフトに舵角センサ181を連結する場合は、カップリング191をその先端部に合うカップリングに交換すればよく、舵角センサ181の汎用性を高めることができる。
【0046】
舵角センサ181をメンテナンスのために取外すには、まず、ビス187を外してハウジング183からカバー部材186を外した状態にし、次に、ブラケット182にハウジング183を止めているボルト(不図示)を外せばよい。
このように、アウトプットシャフト86の一端に舵角センサ181を配置したことで、舵角センサ181を簡単に取外す、又は取付けることができる。
【0047】
本発明は、図7に示したように、舵角センサ181を、ステアリングシャフト38の先端、詳しくは、アウトプットシャフト86の下端部である先端部86cにカップリング191を介して取付けたことを特徴とする。
【0048】
舵角センサ181をアウトプットシャフト86の先端部86cにカップリング191を介して取付けたので、例えば、アウトプットシャフト86の先端部86cの外径等の形状が車種に応じて異なっても、それに応じたカップリングを用いることで、車種に関係なく汎用の舵角センサ181を使用することができ、コスト低減を図ることができる。
【0049】
また本発明は、舵角センサ181に、アウトプットシャフト86の回動に基づいて回動する回転軸184と、この回転軸184の外周を覆うハウジング183とを備え、回転軸184の外径(例えば、先端部184aの外径や他端部184bの外径)を、アウトプットシャフト86の外径(例えば、被支持部86eの外径や大径部86fの外径)よりも小さくしたことを特徴とする。
【0050】
舵角センサ181に、回転軸184とハウジング183とを備え、回転軸184の外径をアウトプットシャフト86の外径よりも小さくしたので、舵角センサ181自体を小型にすることができ、例えば、舵角センサ181内に、回転軸184を支持する軸受を設ける場合に、軸受を小さくすることができる。
【0051】
尚、本実施形態では、図2及び図3に示したように、舵角センサ93をステアリングシャフト38の下端に配置したが、これに限らず、舵角センサ93をステアリングシャフト38の上端に配置してもよい。ステアリングシャフト38の上端は、図1に示したように、ハンドル37を取付けているだけであるから、大きなスペースで舵角センサ93の取付け、取外しを容易に行うことができる。
【0052】
また、図7において、アウトプットシャフト86の先端部86cの外周面に被検出部を設けることもできる。この場合、構成部品を少なくしながらも、舵角センサ181を小さくすることができる。
【産業上の利用可能性】
【0053】
本発明は、電動パワーステアリング装置を備える不整地走行車両等の四輪車に好適である。
【図面の簡単な説明】
【0054】
【図1】本発明に係る電動パワーステアリング装置を備える不整地走行車両の側面図である。
【図2】本発明に係る不整地走行車両の要部側面図である。
【図3】本発明に係るアウトプットシャフト下端支持部の近傍に配置した舵角センサを説明する断面図である。
【図4】本発明に係る電動パワステアリング装置の制御部を示すブロック図である。
【図5】本発明に係る電動パワーステアリング装置の制御部の制御フローを示すフローチャートである。
【図6】本発明に係る電動パワーステアリング装置の制御に用いる舵角マップを示すグラフである。
【図7】本発明に係る舵角センサの別実施形態を説明する断面図である。
【符号の説明】
【0055】
10…不整地走行車両、24…電動パワーステアリング装置、37…ハンドル、38…ステアリングシャフト、83…アクチュエータユニット(パワーアシスト部)、86…アウトプットシャフト、86b,86c…ステアリングシャフトの一端(先端部)、93,181…舵角センサ、143…軸受(ベアリング)、183…ハウジング、184…回転軸、191…カップリング。
【特許請求の範囲】
【請求項1】
ステアリングシャフトの上部にハンドルを取付けるとともに中間部にアクチュエータユニットを設けた電動パワーステアリング装置を備え、この電動パワーステアリング装置に舵角を検出する舵角センサを備える不整地走行車両の舵角センサ配置構造において、
前記ステアリングシャフトの一端に前記舵角センサを配置したことを特徴とする不整地走行車両の舵角センサ配置構造。
【請求項2】
前記舵角センサは、前記ステアリングシャフトの先端にカップリングを介して取付けられることを特徴とする請求項1記載の不整地走行車両の舵角センサ配置構造。
【請求項3】
前記舵角センサは、前記ステアリングシャフトを回転自在に支持する軸受の近傍に配置されることを特徴とする請求項1又は請求項2記載の不整地走行車両の舵角センサ配置構造。
【請求項4】
前記舵角センサは、前記ステアリングシャフトの回動に基づいて回動する回転軸と、この回転軸の外周を覆うハウジングとを備え、前記回転軸の外径は、前記ステアリングシャフトの外径よりも小さいことを特徴とする請求項1、請求項2又は請求項3記載の不整地走行車両の舵角センサ配置構造。
【請求項1】
ステアリングシャフトの上部にハンドルを取付けるとともに中間部にアクチュエータユニットを設けた電動パワーステアリング装置を備え、この電動パワーステアリング装置に舵角を検出する舵角センサを備える不整地走行車両の舵角センサ配置構造において、
前記ステアリングシャフトの一端に前記舵角センサを配置したことを特徴とする不整地走行車両の舵角センサ配置構造。
【請求項2】
前記舵角センサは、前記ステアリングシャフトの先端にカップリングを介して取付けられることを特徴とする請求項1記載の不整地走行車両の舵角センサ配置構造。
【請求項3】
前記舵角センサは、前記ステアリングシャフトを回転自在に支持する軸受の近傍に配置されることを特徴とする請求項1又は請求項2記載の不整地走行車両の舵角センサ配置構造。
【請求項4】
前記舵角センサは、前記ステアリングシャフトの回動に基づいて回動する回転軸と、この回転軸の外周を覆うハウジングとを備え、前記回転軸の外径は、前記ステアリングシャフトの外径よりも小さいことを特徴とする請求項1、請求項2又は請求項3記載の不整地走行車両の舵角センサ配置構造。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2006−256570(P2006−256570A)
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願番号】特願2005−80034(P2005−80034)
【出願日】平成17年3月18日(2005.3.18)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願日】平成17年3月18日(2005.3.18)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]