
両側波帯信号を使用する遠隔検知システムおよび方法
送受信機(102)を含む検知システム(100)が提供される。該送受信機は、第1および第2の周波数成分を有する両側波帯電磁波を送信する送信機チェーンと、標的によって反射された後の両側波帯電磁波を受信する受信機チェーンとを含む。システム(100)は、両側波帯電磁波から情報内容を抽出する基本帯域回路(104)をさらに含む。第1および第2の周波数成分間の分離は、両側波帯電磁波の一方の側波帯によって生成される信号応答内のスパイクを、両側波帯電磁波の他方の側波帯によって生成される信号応答のヌルポイントにほぼ重複させる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信号検知および信号処理の分野、特に、両側波帯信号を用いる検知に関する。
【背景技術】
【0002】
ドップラーレーダ動作検知システムは通常、標的で反射され、受信機で復調される連続波(CW)信号を送信する。ドップラー理論によると、時間変動する位置によって特徴付けられるが正味ゼロ速度である標的は、時間変動する標的の位置に比例して信号の位相を変調した後、送信された信号を反射する。
【0003】
マイクロ波ドップラーレーダは、何年間も無線センサ用途に使用されてきた。マイクロ波ドップラーレーダのより一般的な用途としては、天気検知、位置および距離検知、および自動車速度検知などが挙げられる。しかし、近年、マイクロ波ドップラーレーダは、健康関連および生命サインの監視および検出のための遠隔検知装置としてさらなる注目を集めつつある。医療上の監視および生命サインの検知の分野では、マイクロ波ドップラーレーダは、生理現象の検知、地震による瓦礫に閉じ込められた人の位置を突き止める生命サインの検知、睡眠時無呼吸症患者の心肺監視のために使用されてきた。
【0004】
たとえば、上記のドップラー理論によると、監視下の患者などの人の胸壁を対象にし、CWレーダ型検知システムは、標的に送信される信号と同様の標的信号から反射された信号を受信する。しかし、反射された信号の位相は、人の胸壁の時間変動する位置によって変調される。人の心拍および/または呼吸信号は、胸壁位置に比例する信号を提供し、それによって人の心拍および呼吸による運動に関する情報を提供する位相復調によって監視される。
【0005】
人の心肺活動の検出と測定は、幅広い状況で要求される。心肺測定は通常、たとえば、患者の医学的診断および治療に際して必要とされる。多くの状況で、心肺活動の継続的監視が必要とされる。たとえば、重篤なまたは慢性的な病状の患者の場合である。たとえば、睡眠時無呼吸症などの心臓関連および呼吸器系の障害を有する患者の場合、心肺活動の監視は特に重要である。また、心肺活動の監視は、乳児や高齢者の治療の一環として所望される。
【0006】
マイクロ波ドップラーレーダの使用は、心拍数および呼吸数を患者への直接接触なしに監視することのできる心肺活動の遠隔検知という利点を提供する。マイクロ波ドップラーレーダでは、心臓と呼吸のサインが、上記のように監視下の患者の胸の運動に基づき判定される。
【0007】
しかしながら、このマイクロ波ドップラーレーダの使用に関する重大な制限は、こうしたシステムが、特定用途でしか通常は実用的でない、重くて、嵩張り、高額な導波部品を概して使用することである。これらの問題を未然に防ぐアプローチは、マイクロ波ドップラーレーダと無線周波数集積回路(RFIC)技術とを組み合わせることである。しかし、この組み合わせから独自の1組の問題が生じる。その問題の1つが、上記RFICベースのシステムで使用されることの多い補完的な金属酸化物半導体(CMOS)発振器が相当高い位相ノイズ、すなわち、オフチップ高品質導体を組み込むハイブリッド発振器よりも高いノイズをこうむることである。
【0008】
高位相ノイズの問題は、CMOS動作検出レーダシステムに大きな制限を課す。生理的運動は無線信号の位相変調で符号化されるため、近接位相ノイズは重要なパラメータである。この問題は、位相ノイズの作用を緩和するように距離相関位相ノイズフィルタ効果を利用することによって対処可能である。
【0009】
しかし、残りの問題は、RFICベースのマイクロ波ドップラーレーダシステムの周波数帯域に関する。従来のCW検知は通常、電磁スペクトルの低周波数帯域に位置する波を利用する。上記システムが通常動作する周波数帯域の下端寄りで、上記周波数またはその近傍で動作する別の多くの用途による相当な混雑が生じる。たとえば、2.4GHzのISM帯域は、無線LAN、コアレスフォン、ブルーツース(Bluetooth)、その他の同様の用途のために使用される。増大し続ける上記用途を前提とすると、この問題は将来悪化の一途をたどる可能性が高い。よって、低周波数帯域は、他の多くの用途が動作する帯域でもあるので、混雑しがちである。確かに、ほとんどではないものの多くの産業用、科学用、および医療用(ISM)機器が、2.4GHzのISM帯域内のRF周波数で動作する。その周波数帯域では、装置が最大出力限界を満たして動作することを条件に、オペレータがライセンスを取得する必要なく、様々な種類の機器を作動させることができる。
【0010】
おそらくより大きな問題となるのが、利用される低周波数電磁波が非常に長い波長を有するため、監視される標的の小さな変位への感度が落ちることである。精度の低下は、たとえば患者の胸壁の細かな運動が監視装置の標的である生理的な患者監視に関して特に問題となる。
【発明の開示】
【発明が解決しようとする課題】
【0011】
したがって、特に心肺活動を監視するために、干渉する可能性のある用途の周波数帯域よりも高い周波数帯域で動作可能な遠隔検出システムが必要とされる。さらに、高周波数帯域で動作しつつも、遠隔検出を有効かつ効率的に実施することのできるシステムが必要とされる。
【課題を解決するための手段】
【0012】
本発明は、周波数間の分離が高周波検知信号に関連する重大なヌルポイントの問題を緩和または排除するように、異なる周波数の2つの信号を結びつけることによって生成されるKaバンド電磁波などの両側波帯信号を用いる方法およびシステムに向けられる。本発明は、大幅に向上した検出感度を有するKaバンド電磁波を用いた細かな運動の検出を可能にする。
【0013】
本発明の一実施形態は、遠隔検知方法である。該方法は、第1の周波数成分と第2の周波数成分とを備える両側電磁波を送信することと、対象によって反射された後の電磁波を受信することを含む。該方法を用いて、第1および第2の周波数成分間の分離は、両側電磁波の一方の側波帯に対応する信号応答内のスパイクを両側電磁波の側波帯に対応する信号応答のヌルポイントにほぼ重複させる。
【0014】
本発明の別の実施形態は検知システムである。該システムは、第1および第2の周波数成分を有する両側電磁波を送信する送信機チェーンと、標的によって反射された後の両側電磁波を受信する受信機チェーンとを有する送受信機を含む。該システムは、両側電磁波から情報内容を抽出する基本帯域回路をさらに含む。さらに、該システムは、両側電磁波の一方の側波帯によって生成される信号応答内のスパイクが、両側電磁波の他方の側波帯によって生成される信号応答のヌルポイントにほぼ重複するように第1および第2の周波数成分間の分離が提供される。
【0015】
本発明のさらに別の実施形態は、心肺活動を検知するシステムである。該システムは、監視対象に検知信号を送信し、監視対象から変調信号を受信するKaバンド送受信機を含む。検知信号は、より具体的には、Kaバンド周波数帯域内の周波数を含み、変調信号は監視対象の心肺活動に基づき変調される。該システムは、変調信号に基づき、監視対象の心肺活動を示す基本帯域信号出力を生成するKaバンド送受信機に接続される基本帯域回路をさらに含む。
【0016】
本発明の別の実施形態は、機械指示を記憶する機械読取り可能記憶媒体である。記憶された指示は、第1の周波数成分と第2の周波数成分とを備える両側電磁波の送信と、対象によって反射された後の電磁波の受信を実行する。第1および第2の周波数成分間の分離は、両側電磁波の一方の側波帯に対応する信号応答内のスパイクを、両側電磁波の他方の側波帯に対応する信号応答のヌルポイントにほぼ重複させる。
【発明を実施するための最良の形態】
【0017】
現在好適である実施形態を図に示すが、本発明は図示される正確な配列や手段に限定されないと了解される。
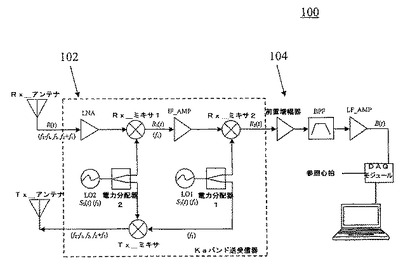
本発明の一実施形態による遠隔検知システム100が、図1に概略的に示される。システム100は図示されるように、Kaバンド送受信機102などの送受信機と、送受信機に電気的に接続される基本帯域回路104とを含む。本明細書で説明されるように、Kaバンド送受信機は、患者や乳児などの監視対象(図示せず)に検知信号を送信し、監視対象から変調信号を受信する。より具体的には、検知信号は、Kaバンド周波数帯域内にありうる周波数を有する。変調信号は、監視対象の心肺活動に基づき変調される。
【0018】
より具体的には、Kaバンド送受信機102は受信機チェーンおよび送信機チェーンを備える。図示されるように、受信機チェーンは、受信アンテナ(Rx_Antenna)、低ノイズ増幅器(LNA)、2つのダウン変換器(Rx_Mixer1およびRx_Mixer2)、IF増幅器(IF_AMP)を含むことができる。送信機チェーンは、送信アンテナTx_Antennaと2つのアップ変換器(TX_Mixer1 および TX_Mixer2)とを含む。基本帯域回路104は図示されるように、前置増幅器(PreAMP)、帯域通過フィルタ(BPF)、および低周波数増幅器(LF_AMP)を備える。
【0019】
図示されるように、Kaバンド送受信機102が2つの電力分配器をさらに含むことに注意されたい。各電力分配器は、より具体的には、3dB電力分配器である。電力分配器は、中間周波数(IF)搬送波信号の電力を2つの成分S1(t)とS2(t)に分割する。電力の半分は送信機チェーンに供給され、残りの半分は受信機チェーンに供給される。TX_Mixer1、第1のアップ変換器の入力は、50Ω抵抗器で終点となることに注意されたい。この独自の成分の配列は、ドップラーレーダセンサとして機能するように汎用Kaバンド送受信機を変換する。
【0020】
当業者によって容易に理解されるように、Kaバンド送受信機102は上記のとおり、通常であれば直接変換受信機で発生する重大なDCオフセット問題を緩和するために2段階の変換を採用する間接変換送受信機である。この独自の利点は、間接受信機の最終段でミキサとVCOが低周波数で動作するために達成される。これにより、基本帯域でのDCオフセットとそれに関連する1/fノイズが低減される。RFおよびIF周波数は、測定における「ヌル」ポイントを回避するように調整される。
【0021】
送信アンテナも受信アンテナも、誘電率εγ=3.0で基板厚0.5mmのRogers RO3003PTFE/セラミック積層板上に製造される4X4プリントパッチアンテナアレイであってもよい。それぞれが、28GHzで12.9dBの最大アンテナゲインと、10度X10度の推定ビーム幅を有する。シングルパッチアンテナと比較して、アンテナアレイはより高い指向性ゲインを有する。これにより、システム100の検出距離は増大し、他の方向からの妨害は低減する。基本帯域回路は、たとえば、LM324低電力演算増幅器を使用して実装される。帯域通過フィルタBPFは、0.1〜10Hzに拡大可能な信号周波数を通過させる。低周波数増幅器LF_AMPと同一の周波数を有する前置増幅器PreAMPは、20〜40dBの可変ゲインを有する。
【0022】
同じLOソースが送信機と受信機に対して使用されると、距離相関効果が基本帯域でのノイズスペクトルを大幅に低減する。このため、VCOはVCO高位相ノイズにかかわらず、Kaバンドドップラーレーダにおけるソースとして使用可能である。
【0023】
本発明の一側面は、標的の細かな動きを検出するためのKaバンド電磁波などの両側波帯電磁波の使用である。Kaバンド電磁波の利用で検出感度は大幅に向上するが、重大なヌルポイントの問題が生じる。しかし、本発明の別の側面がヌルポイントの問題を克服する。より具体的には、上記のように、本発明は異なる周波数の2つの信号を組み合わせることによって生成される両側波帯Kaバンド電磁波を利用して、周波数間の分離によりヌルポイント問題を緩和または排除することができる。
【0024】
本発明で達成される高度な検出感度は、さもなければ実行不可能な細かな動きの検出を可能にする。本発明はKaバンド周波数帯域内の電磁波を利用して、たとえば、心拍および/または呼吸によって誘導される監視下の患者の胸壁の変化を検出できる。本発明の他の用途としては、嘘発見と関連する身体反応の検知、その他の種類の生物医学的検知、「塀の陰」の検知のために個々の兵士によって使用されるレーダなどのレーダ検知などが挙げられる。
【0025】
図1をまだ参照すると、本発明による2段階の信号変換を実行する際、第1の低発振器(LO1)は、周波数f1を有する信号S1(t)を生成する。第2の低発振器(LO2)は、周波数f2を有する信号S2(t)を生成する。当業者によって容易に理解されるように、S1(t)およびS2(t)の電力は、図示される3dB電力分配器などの2つの電力分配器によって分割される。電力の半分は送信機チェーンに供給され、残りの半分は受信機チェーンに供給される。
【0026】
アップ変換器(TX_Mixer)のT(t)の出力は濾波されない。したがって、出力は2つの主周波数成分、下側波帯fL=f2−f1と上側波帯fU=f2−f1とを有する。通常、第2の低発振器(LO2)からのLOの漏れから生じる、アップ変換器(TX_Mixer)の出力内のもう1つの周波数成分f2がある。
【0027】
さらに図2を参照すると、送信アンテナ(TX_Antenna)コネクタで測定される送信機の出力電力スペクトルが示されている。この特定の実施形態に関すると、下側波帯周波数と上側波帯周波数はそれぞれ、−7.210dBmと−9.64dBmの出力レベルの26.52GHzと27.64GHzである。中間の27.08GHz周波数は、アップ変換器(TX_Mixer)の非理想分離による第2の低発振器(LO2)からのLOの漏れである。LOの漏れは明白だが、本明細書で説明されるように、基本帯域信号の検出には影響を及ぼさない。
【0028】
Kaバンド送受信機102の受信機チェーンでは、受信信号R(t)は、心拍および/または呼吸がシステム100を用いて検出および監視される対象などの標的からの反射波である。受信信号R(t)は送信信号T(t)と相関関係を有するが、前者の信号の位相は監視下の患者の胸壁などの標的が時間変動した位置によって変調される。第1のダウン変換器(Rx_Mixer1)による第1のダウン変換後、受信信号R1(t)は、周波数f1での2つの変調信号、すなわち、下側波帯fL=f2−f1と上側波帯fU=f2+f1からそれぞれダウン変換された信号から成る。
【0029】
胸壁位置情報は、たとえば、周波数f1でのこれらの2つの信号の位相で変調される。さらに、受信信号R1(t)はDCオフセットと胸壁の運動情報を担持する基本帯域信号とをさらに有し、前者はLO2の漏れ送信の自己混合により、後者は受信信号R(t)のf2成分からダウン変換される。
【0030】
直接ダウン変換が実行されるとき、DCオフセットは基本帯域回路の飽和などの重大な問題をもたらす可能性がある。一方、分離を通じてLOの漏れを低下または低減させることによってDCオフセットを低減させることは、高周波ミキサでは達成し難く、その結果大きなDCオフセットを生じる。よって、本発明によると、間接変換受信機アーキテクチャが利用される。大きなDCオフセットと近傍のDC信号は、IF増幅器(IF_AMP)の帯域通過周波数反応によって除去される。したがって、以下の説明では、送信波内のf2周波数成分は、基本帯域信号に影響を及ぼさないので無視することができる。第2のダウン変換器(Rx_Mixer2)による第2のダウン変換後、出力R2(t)は、対象の胸の運動情報を担持する基本帯域信号と、帯域通過回路104で濾波される不所望の高周波スパーとから成る。
【0031】
本発明の別の実施形態によると、特別に設計および製造された2種類の低プロファイルのプリントパッチアンテナが使用されている。1つは、誘電率εγが3.2で基板厚が0.762mmの高周波基板材料GML1000上に製造されるプリントシングルパッチアンテナである。このアンテナは、30GHzで3.9dBの最大アンテナゲインと60度X80度の推定ビーム幅を達成する。
【0032】
もう1つのアンテナは、誘電率εγ=3.0で基板厚0.508mmのRogers RO3003PTFE/セラミック積層板上に製造される4X4プリントパッチアンテナアレイである。全体のサイズは20.9X28.2mm2である。本発明によるアンテナアレイは、28GHzで12.9dBの最大アンテナゲインと、10度X10度の推定ビーム幅を達成する。Kaバンド信号の送受信には他の種類のアンテナも使用することができ、これらのアンテナは共通の1つの基板上に作製される。シングルパッチアンテナと比較して、アンテナアレイはより高い指向性ゲインを有するため、検出距離が増大し、他の方向の他の無線装置からの妨害が低減される。
【0033】
システム100のさらに別の実施形態によると、基本帯域回路104は、2つのLM324低出力演算増幅器を備える。帯域通過フィルタ(BPF)は、0.1〜10Hzの通過域を有する。本実施形態による前置増幅器(PreAMP)と低周波数増幅器(LF_AMP)はいずれも、20〜40dBの可変ゲインを有する。測定段階中、IOtech Personal Daq/54(DAQモジュール)などの22ビットのUSBデータ捕捉モジュールは、基本帯域信号をサンプリングするのに使用することができる。LabVIEWプログラムなどの機械読取り可能コードは、サンプリングデータを処理し、監視対象のランダムな動きによる不所望の偽反応をさらに除去するのに使用することができる。
【0034】
この時点では、本発明の特定の理論的基盤を簡単に説明することが有益である。位相変調のみが検討されるため、普遍性を損なうことなく振幅の変動を無視することができる。したがって、第1の低発振器(LO1)および第2の低発振器(LO2)、によってそれぞれ生成される2つのLO信号S1(t)およびS2(t)は以下の式のように書くことができる。
【0035】
S1(t)=cos(2πf1t+φ1(t)) (1)
S2(t)=cos(2πf2t+φ2(t)) (2)
ただし、f1およびf2はS1(t)およびS2(t)のそれぞれの周波数、tは経過時間、φ1(t)およびφ2(t)はS1(t)およびS2(t)のそれぞれの位相ノイズである。
【0036】
送信信号T(t)が単独の周波数成分(単独の側波帯)fのみを有する場合、
T(t)=cos[2πft+φ(t)] (3)
となる。
ただし、φ(t)は送信機チェーンの信号ソースとミキサからの総合位相ノイズである。
【0037】
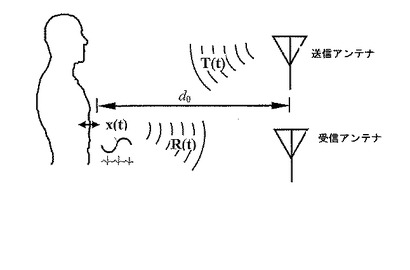
信号T(t)がx(t)によって与えられる時間変動する運動を伴う距離d0で標的(たとえば、患者の胸壁)によって反射し返されると、送信機と受信機間の総合移動距離は2d(t)=2d0+2x(t)である。図3は、対象の心拍および/または呼吸を検出する状況における実質的作用を概略的に示す。受信信号は
R(t)≒cos[2πft−(4πd0/λ)−(4πx(t)/λ)
+φ(t−(2d0/c))] (4)
として概算される。
ただし、cは信号の伝播速度、λは空気内の波長でc/fに等しい。
【0038】
受信信号は送信信号と同様だが、標的の距離と標的の周期的運動による位相変調とによって決定される遅延を有する。標的(たとえば、対象の胸壁)の周期的運動に関する情報は、この信号が送信信号と同じソースから得られるLO信号と混成される場合に復調することができる。このレーダトポロジは、送信機と受信機に同じ発信器を使用して、2つの信号の位相ノイズに常に相関関係を持たせるという能力を利用する。
【0039】
2段階のダウン変換後に結果として生じる基本帯域信号B(t)は
B(t)=cos[(4πd0/λ)+θ0(4πx(t)/λ)+Δφ(t)] (5)
のように概算される。
ただし、4πd0/λは標的d0への距離による一定の位相シフトであり、θ0は表面での反射と無線ブロック間の遅延による固定位相シフトである。用語Δφ(t)は距離相関効果により基本帯域では通常かなり小さな総合残余位相ノイズである。B(t)はx(t)の関数であるため、周期的な心拍および/または呼吸信号は、たとえば、B(t)から抽出することができる。
【0040】
式(5)から、基本帯域出力内の変調位相4πx(t)/λは波長に反比例する。同じ変位に関して、システム100によって提供される波長が短いほど、大きな位相変調が生成される。Kaバンドスペクトルは、11.5mm〜7.5mmの波長に相当する26GHz〜40GHzにまたがる。したがって、30GHz(λ=10mm)波によって生成される位相は、たとえば、2.4GHz(λ=125mm)での位相の12.5倍(約22dB)である。波長が短いほど小さな移動により敏感になる。これが、システム100によって提供されるKaバンド波を用いる明確な利点である。
【0041】
本発明の上記の理論的側面は、たとえば、心拍による対象の胸壁の運動振幅が1mmであり、その波形が図4Aに示されるように、指先センサの参照心拍信号から修正されると仮定することによって、対象の心拍および/または呼吸の検出または監視に対してモデル化およびシミュレーション化することができる。Δφ(t)を無視し、θ0を一定にすると、図4Bに示されるように、基本帯域信号B(t)は、波長λが10mm(30GHz)に等しいとき距離d0に応じて変動する。図4Bに示されるように、B(t)の振幅は、最大から最小まで周期的に変化する。B(t)の振幅がd0=2.23mmで最小に達すると、信号はほとんどノイズ中に覆い隠されてしまうという事実により、心拍信号を検索することが困難な可能性がある。B(t)の振幅が最小である距離は、ここではヌルポイントと称する。概して、感度測定を行う際にヌルポイントを引き起こす距離によって、検知システムと標的が分離されると、検出感度は最も低く、したがってセンサは最も低い検出精度を有する。
【0042】
逆の状況で、B(t)の振幅がd0=3.48mmで最大になると、心拍に対応する速度プロファイルが図4Aに示される元の信号と同じ形状を有するため、正確な心拍速度を検出するのがさほど困難ではない。最大であるB(t)の振幅を生じるレーダシステムと標的とを分離する距離は、ここでは最適ポイントと称する。これにより、検出感度と検出精度が大幅に向上した測定が提供される。
【0043】
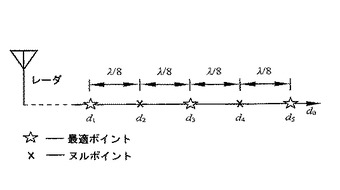
図5は、単側波帯送信波に関するレーダシステムから対象への距離に沿ったヌルポイントと最適ポイントの分布を示す。30GHz波の場合、隣接するヌルポイントと最適ポイント間の距離はわずかに1.25mm(λ/8)で、ほぼ胸壁の運動程度である。この距離は通常小さすぎるため、十分に有効な測定値を容易に得ることができない。
【0044】
検知システムが単音Kaバンド波を送信する場合、検出精度は対象のごくわずかな動きで大幅に変動し、この状況下で所望の検出精度を達成することは極めて困難である。したがって、レーダシステムは単音波のみを送信する場合、高周波で適切に動作しない。
【0045】
本発明によると、両側波帯波を利用することによってヌルポイントの問題が解決される。システム100は、送信信号T(t)として2つのKaバンド周波数成分fLおよびfUを有するKaバンド波を利用する。したがって、受信信号R(t)は2つの周波数成分fLおよびfUも有する。以下、BL(t)とBU(t)はそれぞれfLおよびfU周波数成分から配信される基本帯域信号を表す。したがって、以下の式が当てはまる。
【0046】
B(t)=BL(t)+BU(t) (6)
BL(t)=cos[θL+(4πx(t)/λL)+ΔφL(t)] (7)
BU(t)=cos[θU+(4πx(t)/λU)+ΔφU(t)] (8)
θL=(4πd0/λL)+θ0L ,θU=(4πd0/λU)+θ0U (9)
ただし、λLおよびλUはそれぞれ下側波帯の波長および上側波帯の波長である。波長λLおよびλUはそれぞれc/fLおよびc/fUに等しい。用語θLおよびθUは上記したように、ヌルポイントの位置と距離を決定する位相シフトである。
【0047】
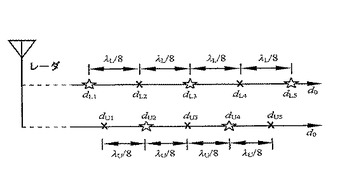
上記の説明から、BL(t)またはBU(t)のいずれかは重大なヌルポイントの問題を抱え、信頼のおける検出を提供できない。しかし、BL(t)およびBU(t)が同時に存在する場合、B(t)はBL(t)およびBU(t)の重畳である。BL(t)およびBU(t)は類似しているが、両者間に位相差はある。本発明によると、位相差が適切に調整されると、基本帯域出力B(t)はBL(t)またはBU(t)のみの場合ほどヌルポイントの問題は大きくない。さらに図6を参照すると、両側波帯波に関するヌルポイントと最適ポイントの分布が概略的に示されている。LO1の周波数f1が適切に調整されると、下側波帯からのヌルポイントと上側波帯からの最適ポイント、またはその逆が互いに重複させられる。
【0048】
一方の側波帯からのヌルポイントが他方の側波帯からの最適ポイントに重複するとき、検出精度が大幅に向上することに注意されたい。すなわち、下側波帯からのヌルポイントと上側波帯からの最適ポイントが重複する場合に、検出精度が大幅に向上する。下側波帯からの最適ポイントと上側波帯からのヌルポイントが重複する場合も同様に、検出精度が大幅に向上する。
【0049】
式(7)および(8)の残余ノイズΔφL(t)およびΔφU(t)は、距離相関効果によるθと位相変調 4πx(t)/λと比べてかなり小さい。したがって、普遍性を損なうことなく以下の説明ではその効果は無視される。λLは非常にλUに近いため、位相変調4πx(t)/λLおよび4πx(t)/λUはほぼ等しい振幅を有する。
【0050】
θLおよびθUがπの偶数倍だけ分離されるとき、BU(t)とBU(t)は同相で同期される。したがって、B(t)は、BL(t)またはBU(t)のいずれかにより与えられるのと同じ位置でほぼ同じ最適ポイントとヌルポイントを生じさせ、検出精度を低下させる密な間隔のヌルポイントと同様の問題を有する。
【0051】
θLおよびθUがπの奇数倍だけ分離されるとき、BL(t)およびBU(t)は位相がずれている。BL(t)およびBU(t)はほぼ同じ振幅だが位相が逆であるため、互いを相殺する。したがって、B(t)の振幅は相当小さく検出しづらい。
【0052】
その結果、θLとθU間の位相差がπの整数倍であるとき、新たなヌルポイント状況が測定で生じる。単側波帯波のヌルポイントが局所ヌルポイントとして定義されれば、この新たなヌルポイント状況は大域ヌルポイントとして定義される。この大域ヌルポイントでは、検出精度が最も低い。位相差は
θU−θL=(4πd0/λU)−(4πd0/λL)+Δθ0=kπ,k=0,±1,±2,... (10)
である。
ただし、
Δθ0=θ0U−θ0L (11)
λL=c/fL、λU=c/fUを代入すると、以下の
fU−fL=(c/4πd0)(kπ−Δθ0),=0,±1,±2,... (12)
を生じる。
式(12)にfU=f2+f1およびfL=f2−f1を代入すると、
f1=(k/d0)・37.5MHz−(c/8πd0)・Δθ0,k=0,±1,±2,...
(13)
を生じる。
ただし、d0は距離である。
【0053】
θLおよびθUがπ/2の奇数倍で分離されるとき、BL(t)およびBU(t)は直角位相である。BL(t)とBU(t)のうち少なくとも1つはヌルポイントにない。ヌルポイントにないものは、最終出力B(t)を決定する。したがって、この場合、検出精度全体が高くなる。このポイントが大域最適ポイントと定義される。
【0054】
したがって、θUおよびθL間の差は
θU−θL=(4πd0/λU)−(4πd0/λL)+Δθ0=kπ,k=0,±1,±2,...
(14)
である。
式(10)〜(13)によって記載されるプロセスを繰り返すと、
f1=(2k+1/d0)18.75MHz−(c/8πd0)Δθ0,k=0,±1,±2,...
(15)
を生じる。
【0055】
上記の分析が示すように、対象の位置が固定されると、この位置はf1周波数を適切に選択することによって大域最適ポイントまたは大域ヌルポイントに設定することができる。たとえば、f1周波数で、d0=1mの対象位置が偶然ヌルポイントである場合、式(13)および(15)に従いf1がf1±(2k+1)x18.75MHzに調整されれば、このヌルポイントは最適ポイントに変更することができる。したがって、対象の位置を動かさずにf1周波数を調節することによって、常に最適ポイントで正確な検出を行うことができる。
【0056】
f1周波数が固定されると、2つの基本帯域信号の重複のため、両側波帯波に関する大域ヌルポイントおよび最適ポイントの分布は単基本帯域の場合と異なる式、(13)および(15)は、
d0=(k/8)λ1−(λ1/8π)・Δθ0,k=0,±1,±2,... (16)
と
d0=((2k+1)/16))・λ1−(λ1/8π)・Δθ0,k=0,±1,±2,...
(17)
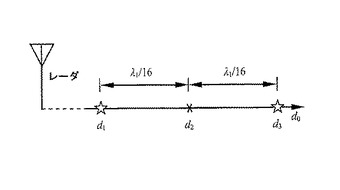
にそれぞれ書き換えることができる。式(16)および(17)から、ヌルポイントはλ1/8毎に発生し、最適ポイントも同様である。さらに、隣接するヌルポイントと最適ポイントはλ1/16で分離される。両側波帯波に関するヌルポイントおよび最適ポイントの分布を図7に示す。
【0057】
通常、周波数f1は周波数f2よりもずっと低いので、隣接する大域ヌルポイントと大域最適ポイント間の距離はずっと長い。Kaバンド周波数よりもずっと小さなf1=500MHzの場合、ヌルポイントは単30GHz波の場合の2.5mmよりもずっと長い75mm毎に生じるので、レーダの位置を調整することにより、信頼のおける検出精度を得て、ヌルポイントを回避することができる。
【0058】
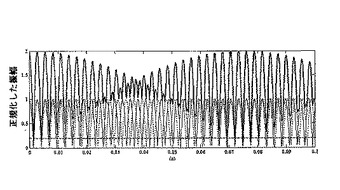
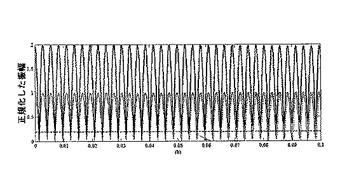
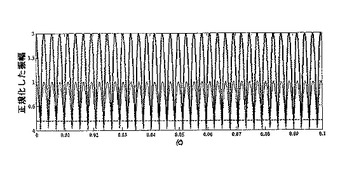
式(16)および(17)は、周波数f1が低いほど、結果として生じるヌルポイントがさらに離れることを示唆している。よって、ヌルポイントの問題は、非常に低いf1で解決される。しかし、周波数f1が小さすぎる場合、ヌルポイントはかなり長距離にわたり局所ヌルポイントによって支配される。図8A〜8Cは、f2=27.1GHzのときのf1=500MHz、f1=50MHz、およびf1=5MHzのそれぞれに関する局所ヌルポイントおよび大域ヌルポイントの様々な分布を示す。距離は横軸に示され、信号の正規化振幅は縦軸に示される。信号が谷にぶつかると、振幅は最も小さいので、検出精度は最も低い。細実線と細点線はそれぞれ、基本帯域信号BL(t)およびBU(t)に関する局所ヌルポイントと最適ポイントの分布を表す。BL(t)およびBU(t)の振幅は送受信機における周波数反応の平坦度のせいでほとんど差異がないかもしれないが、分析の都合上、ここでは同一の振幅を仮定する。
【0059】
図からすると、最も近い局所ヌルポイント(谷)の分離は約2.5mmである。太実線は、B(t)に関する大域ヌルポイントと最適ポイントの分布を示す。f1=500MHzのとき、大域ヌルポイントの分離は図8Aに示されるように75mmである。しかし、f1=5MHzの場合、大域ヌルポイントの分離は7.5mである。図8(c)に示されるように、全体が0.1mの範囲では、B(t)はBL(t)およびBU(t)と同じヌルポイントおよび最適ポイントを有し、質的に大域ヌルポイントとして予め定義されている。量的には、B(t)に関する信号谷の振幅がBL(t)またはBU(t)のいずれかのピーク振幅の20%に満たない場合、B(t)を大域ヌルポイント領域と定義する。この定義によると、B(t)は、f1=5MHzの場合約1m、50MHzの場合0.1m、500MHzの場合0.01mの長さの大域ヌルポイント領域にとどまる。
【0060】
測定におけるこのヌルポイント問題を克服し、高い検出精度を得るには、レーダ位置を移動させる、あるいはf1周波数を変更することによって最適ポイントまたはその近傍で測定を行う方が適切である。5MHzほど低いLO1周波数の場合、レーダが最も近い最適ポイントに到達するように3mもの距離を移動することが困難であるため、唯一の方法はLO1周波数を調節することである。
【0061】
Kaバンド波の場合、長距離間の信号損失は低周波数よりもずっと高い。受信機で同じ出力レベルの場合、Kaバンド波の伝播距離はずっと短くなる。この測定では、低出力送信を用いて、距離が2.5mまで増加すると、検出精度が急速に低下し始める。ヌルポイントがd0=2.5mで発生すれば、このヌルポイントを最適ポイントに切り換え、f1周波数は式(15)に従い最低7.5MHzで変更させる必要がある。ヌルポイントがd0=0.1mで発生する場合、最も小さな調整ステップは、第1の低発振器(LO1)のかなり大きな調整範囲である187.5MHzとなる。したがって、f1周波数とVCO調整範囲の選択は、ヌルポイントがシステム100に近い距離で出現するとき、一緒に検討される。したがって、450MHz〜800MHzVCOのシステム100の調整範囲は好ましくは、f1ソースとして選択される。同時に、このVCO周波数は約75mmのヌルポイント分離を提供するため、標的に対するシステム100の位置を調節することによってヌルポイントを回避する可能性も提供する。
【0062】
検出精度が非常に低いとき、システム100がヌルポイントにより引き起こされる誤った警告を検出しているのか、あるいは、監視対象に対する警告などの実際に重要な結果を検出しているのかを判定するのが困難であるという問題が生じる。この状況下で、標的に対するシステム100の位置を調節する、あるいは周波数f1を変更することによって検出精度を大幅に向上させることができるならば、それはヌルポイントによる誤った警告を意味する。さもなければ、患者の監視の背景では、たとえば、患者の心肺に問題があることを示す。
【0063】
上記のように、検出精度は概して、ヌルポイント、最適ポイント、またはその間のどこかである、システムに対する標的の位置に左右される。しかし、システム100は、周波数f1を調整することによって最適な反応を得ることができる。したがって、システム100はシステムに対する標的の位置に関係なく、高い検出精度を達成する。
【0064】
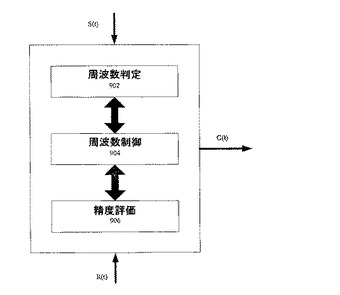
図9は、本発明の別の実施形態による周波数分離ユニット900の概略図である。周波数分離ユニット900は、標的検知に使用される両側波帯Kaバンド電磁波の第1の周波数成分f1および第2の周波数成分f2間の所望の分離を判定する。図示されるように、周波数分離ユニット900は、相互に通信する周波数判定モジュール902、精度評価モジュール904、および周波数制御モジュール906を備える。
【0065】
動作上、周波数判定モジュール902は、両側波帯Kaバンド電磁波に対応する信号S(t)を受信する。たとえば、両側波帯Kaバンド電磁波は、モジュールに直接供給する。もしくは、両側波帯Kaバンド電磁波の物理パラメータを表す信号を供給する。両側波帯Kaバンド電磁波の検出精度を表し、第1および第2の周波数成分f1、f2の分離における調節が保証されているかどうかを判定する信号R(t)が精度判定モジュール904に供給される。保証されていれば、周波数制御モジュール906は、上記したように、所望の周波数分離を実行し、両側波帯Kaバンド電磁波の検知精度を向上させるために、両周波数成分の一方または両方の変更を生じさせる制御信号C(t)を供給する。
【0066】
より具体的には、上記したように、検知精度は、両側波帯Kaバンド電磁波の一方の側波帯によって誘発される信号応答の最適ポイントが2つの周波数成分間の分離により、両側波帯Kaバンド電磁波の他方の側波帯によって誘発される信号応答のヌルポイントと完全にあるいはほぼ重複するように、周波数成分f1およびf2の一方または両方を調節することによって大幅に高められる。
【0067】
より一般的ではあるが、本明細書に記載される技術と同様、両側波帯Kaバンド電磁波の一方の側波帯によって誘発される信号応答のスパイクが他方の側波帯によって誘発される信号応答のヌルポイントと完全にあるいはほぼ重複する場合、検出精度が向上することを理解すべきである。また、本発明によると、周波数成分間の所望の分離を得るように両周波数成分f1およびf2の一方または両方を調節することによってこれが達成される。本明細書に定義されるように、スパイクは、所定の閾値を超える信号応答である。
【0068】
周波数分離ユニット900の例示のモジュールはそれぞれ、配線回路および/または機械読取り可能コード内に実装することができる。好ましくは、周波数分離ユニット900は上記の検知システム100に組み込まれる、あるいは接続される(図1を参照)。
【0069】
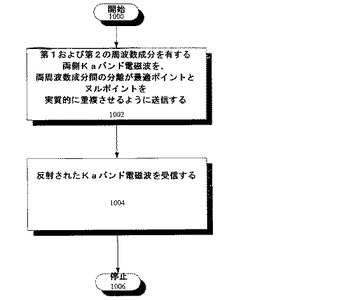
図10は、本発明のさらに別の実施形態による、標的を遠隔検知するための方法1000の例示ステップを示すフローチャートである。該方法は、ステップ1002では、第1の周波数成分と第2の周波数成分とを備える両側Kaバンド電磁波を送信することを含む。ステップ1004では、該方法1000は、次に、Kaバンド対象によって反射された後の電磁波を受信する。第1および第2の周波数成分間の分離によって、上記したように、両側Kaバンド信号の側波帯に対応する各最適ポイントは、両側Kaバンド信号の異なる側波帯に対応する各ヌルポイントとほぼ重複させられる。該方法は1006で完了する。
【0070】
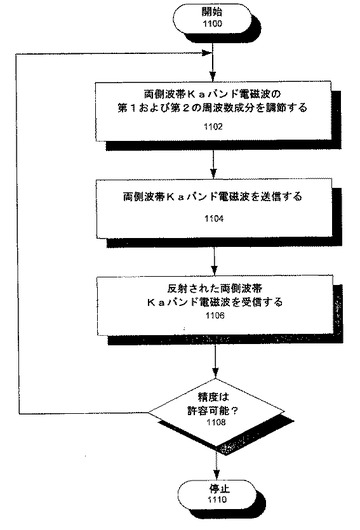
図11は、本発明のさらに別の実施形態による、標的を遠隔検知するために使用される両側波帯Kaバンド電磁波の周波数成分の分離を判定する方法1000の例示ステップを示すフローチャートである。該方法は、両側波帯Kaバンド電磁波の第1および第2の周波数成分の少なくとも一方を調節するステップ1102を含む。両側波帯Kaバンド電磁波は、ステップ1104で送信される。送信波はステップ1106で反射され受信されて、その後、波の検出精度がステップ1108で評価される。検出精度が所定の閾値または基準により許容不能である場合、許容可能な精度が得られるまで先行するステップが繰り返される。許容可能な精度が得られると、該方法はステップ1110で完了する。
【0071】
より具体的には、該方法によると、周波数間の分離が、一方の側波帯からの最適ポイントを両側波帯Kaバンド電磁波の他方の側波帯のヌルポイントとほぼまたは完全に重複させるように、第1および第2の周波数f1およびf2の一方または両方を調節する。より具体的には、上記したように、両周波数の一方または両方が、一方の側波帯からのスパイクをKaバンド電磁波の他方の側波帯からのヌルポイントと完全にあるいはほぼ重複させる周波数間の分離を実行するように調節される場合、検出周波数が向上する。
【0072】
上記したように、本発明は、診断や患者または病人の心拍および呼吸の監視など、医療分野において幅広い用途を有する。しかし、本発明は、様々な非医学的用途も有する。図12は、乳児または幼児1200の心拍または呼吸の監視に関する、本発明のさらに別の実施形態による用途を概略的に示す。図示されるように、遠隔検知システム100は、上記したとおり、乳児モニタ1202に組み込まれる、あるいは接続される。システム100は乳児監視システムとして機能し、信号1204を乳児1200に送信し、反射信号1206を乳児から受信する。上記したように、システム100は乳児の心拍を監視するように乳児1200の胸の動きを検出する。
【0073】
当業者によって容易に理解されるように、システム100は一体化チップに実装され、乳児モニタ1202のハウジング内に格納することができる(システム100によって使用される相対的に低い電力とKaバンド内の信号の短波長とは、従来装置よりもサイズが大幅に低減されたアンテナの使用を可能にし、システムがこのように実装される理由の1つである)。別の実施形態では、システム100は、ラップトップ、携帯電話、またはその他の携帯型装置内に設置することができる。さらに、システム100は、送信され反射された信号1204、1206をラップトップ、携帯電話、またはその他の携帯型装置の画面上に心電図画像を生成するためにデジタル形式に変換するハードウェアおよび/または ソフトウェアを備える。
【0074】
さらに別の実施形態によると、乳児モニタ1200は、システム100に接続される送信機(明確には図示せず)を含む。送信機はシステム100の出力を受信し、乳児モニタ1200から離れた無線装置にその出力を送信する。システム100の出力は、たとえば、心電図画像やその他の監視情報を表示可能な画面を有する携帯電話またはラップトップに送信する。本実施形態は、両親や看護婦が乳児を綿密に監視しつつ、乳児室から離れた場所で動き回ることができるという利点を提供する。
【0075】
本発明のさらに別の実施形態による本発明の別の非医学的用途を図13に概略的に示す。本実施形態によると、システム100は実行モニタとしての役割を果たす。システム100は図示されるように、トレッドミル1302などの実行装置またはその近傍に搭載されるハウジング1300内に格納される。拡張実行期間中に実行に従事している、あるいは休止している人物1304の近傍に配置された場合、システム100はその人物の心拍および/または呼吸を監視することができる。他の実施形態は、たとえば、病院などの医療施設に位置する人物の監視や研究所などの施設に配置される動物の監視を含む。
【0076】
本発明はいくつかの独自の利点を提供する。1つの利点は、Kaバンド周波数スペクトルが控えめにしか利用されないため、システムが他の用途からの妨害を受けるリスクを低減することである。
【0077】
もう1つの利点は、これらの周波数での信号の波長が短くなるほど、小さな変位により敏感になることである。基本帯域出力内での変調位相は、波長に反比例する。よって、同じ変位に関しては、波長が短いほど位相変調が大きくなる。たとえば、システムが26GHz〜40GHzの周波数帯域で作動される場合、対応する波長は11.5mm〜7.5mmである。したがって、30GHz波(対応する波長は10mm)によって生成される位相は、2.4GHz(対応する波長は125mm)の場合の位相の12.5倍、すなわち、約22dBである。
【0078】
本発明を実施する際に使用される短波長からはさらに別の利点が生じる。Kaバンド内の信号の波長が短いほど、たとえば、従来装置よりも大幅にサイズを低減したアンテナの使用が可能になる。実際、上記したように、本明細書に記載されるサイズは、チップ上に統合できるほど小型である。
【0079】
Kaバンド内の両側波帯信号を用いて本発明を実施する特別の利点のいくつかを説明してきた。しかしながら、本発明はKaバンド内の信号を用いる状況で主に説明されているが、本発明がこの点に限定されないことは明白である。事実、本明細書に記載される発明はKaバンドを超える周波数を用いても実行可能であることは明白である。よって、周波数がKaバンド内にある両側波帯信号を使用することは特定の利点を有する一方で、本発明はKaバンド内およびKaバンドを超える周波数を有する両側波帯信号に適用される。
【0080】
本発明は、ハードウェア、ソフトウェア、またはハードウェアとソフトウェアの組み合わせで実現することができる。本発明は、1つのコンピュータシステムで集中的に、あるいは様々な構成要素を相互接続したコンピュータシステムに展開させて分散的に実現することができる。本明細書に記載される方法を実行するのに適した任意の種類のコンピュータシステムまたはその他の装置が好適である。ハードウェアとソフトウェアの典型的な組み合わせがコンピュータプログラムを備えた汎用コンピュータシステムであって、該プログラムはロードされ実行される際に、本明細書に記載される方法を実行するようにコンピュータシステムを制御する。
【0081】
本発明は、本明細書に記載される方法の実行を可能にする全ての特徴を備え、コンピュータシステムにロードされる際にこれらの方法を実行することのできるコンピュータプログラム製品に組み込まれることができる。この状況でのコンピュータプログラムは、任意の言語、コード、または表記で、情報処理能力を有するシステムに、特定の機能を直接、あるいはa)別の言語、コード、または表記への変換、b)異なる素材形式での再生のいずれか、または両方の後に実行させることを目的とした1組の指示を表示することを意味する。
【0082】
本発明は、その精神または必須の特性から逸脱せずに他の形式で具体化させることができる。したがって、上記の説明ではなく下記の請求項を、本発明の範囲を示すものとして参照すべきである。
【図面の簡単な説明】
【0083】
【図1】本発明の一実施形態による心肺活動の遠隔検知システムの概略図である。
【図2】図1に示される検知システムで生成される出力スペクトルの表示例である。
【図3】図1に示される検知システムの動作側面の概略図である。
【図4A】本発明の別の実施形態による検知システムの動作をシミュレートする、モデル心拍信号および模擬基本帯域信号のそれぞれの振幅対時間グラフの例である。
【図4B】本発明の別の実施形態による検知システムの動作をシミュレートする、モデル心拍信号および模擬基本帯域信号のそれぞれの振幅対時間グラフの例である。
【図5】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図6】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図7】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図8A】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図8B】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図8C】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図9】本発明のさらに別の実施形態による周波数分離ユニットの概略図である。
【図10】本発明のさらに別の実施形態による、標的を遠隔検知する方法のステップの例を示すフローチャートである。
【図11】本発明のさらに別の実施形態による、標的を遠隔検知するために使用される両側波帯Kaバンド電磁波の周波数成分分離を判定する方法のステップの例を示すフローチャートである。
【図12】本発明のさらに別の実施形態による乳児モニタの概略図である。
【図13】本発明のさらに別の実施形態による実行モニタの概略図である。
【技術分野】
【0001】
本発明は、信号検知および信号処理の分野、特に、両側波帯信号を用いる検知に関する。
【背景技術】
【0002】
ドップラーレーダ動作検知システムは通常、標的で反射され、受信機で復調される連続波(CW)信号を送信する。ドップラー理論によると、時間変動する位置によって特徴付けられるが正味ゼロ速度である標的は、時間変動する標的の位置に比例して信号の位相を変調した後、送信された信号を反射する。
【0003】
マイクロ波ドップラーレーダは、何年間も無線センサ用途に使用されてきた。マイクロ波ドップラーレーダのより一般的な用途としては、天気検知、位置および距離検知、および自動車速度検知などが挙げられる。しかし、近年、マイクロ波ドップラーレーダは、健康関連および生命サインの監視および検出のための遠隔検知装置としてさらなる注目を集めつつある。医療上の監視および生命サインの検知の分野では、マイクロ波ドップラーレーダは、生理現象の検知、地震による瓦礫に閉じ込められた人の位置を突き止める生命サインの検知、睡眠時無呼吸症患者の心肺監視のために使用されてきた。
【0004】
たとえば、上記のドップラー理論によると、監視下の患者などの人の胸壁を対象にし、CWレーダ型検知システムは、標的に送信される信号と同様の標的信号から反射された信号を受信する。しかし、反射された信号の位相は、人の胸壁の時間変動する位置によって変調される。人の心拍および/または呼吸信号は、胸壁位置に比例する信号を提供し、それによって人の心拍および呼吸による運動に関する情報を提供する位相復調によって監視される。
【0005】
人の心肺活動の検出と測定は、幅広い状況で要求される。心肺測定は通常、たとえば、患者の医学的診断および治療に際して必要とされる。多くの状況で、心肺活動の継続的監視が必要とされる。たとえば、重篤なまたは慢性的な病状の患者の場合である。たとえば、睡眠時無呼吸症などの心臓関連および呼吸器系の障害を有する患者の場合、心肺活動の監視は特に重要である。また、心肺活動の監視は、乳児や高齢者の治療の一環として所望される。
【0006】
マイクロ波ドップラーレーダの使用は、心拍数および呼吸数を患者への直接接触なしに監視することのできる心肺活動の遠隔検知という利点を提供する。マイクロ波ドップラーレーダでは、心臓と呼吸のサインが、上記のように監視下の患者の胸の運動に基づき判定される。
【0007】
しかしながら、このマイクロ波ドップラーレーダの使用に関する重大な制限は、こうしたシステムが、特定用途でしか通常は実用的でない、重くて、嵩張り、高額な導波部品を概して使用することである。これらの問題を未然に防ぐアプローチは、マイクロ波ドップラーレーダと無線周波数集積回路(RFIC)技術とを組み合わせることである。しかし、この組み合わせから独自の1組の問題が生じる。その問題の1つが、上記RFICベースのシステムで使用されることの多い補完的な金属酸化物半導体(CMOS)発振器が相当高い位相ノイズ、すなわち、オフチップ高品質導体を組み込むハイブリッド発振器よりも高いノイズをこうむることである。
【0008】
高位相ノイズの問題は、CMOS動作検出レーダシステムに大きな制限を課す。生理的運動は無線信号の位相変調で符号化されるため、近接位相ノイズは重要なパラメータである。この問題は、位相ノイズの作用を緩和するように距離相関位相ノイズフィルタ効果を利用することによって対処可能である。
【0009】
しかし、残りの問題は、RFICベースのマイクロ波ドップラーレーダシステムの周波数帯域に関する。従来のCW検知は通常、電磁スペクトルの低周波数帯域に位置する波を利用する。上記システムが通常動作する周波数帯域の下端寄りで、上記周波数またはその近傍で動作する別の多くの用途による相当な混雑が生じる。たとえば、2.4GHzのISM帯域は、無線LAN、コアレスフォン、ブルーツース(Bluetooth)、その他の同様の用途のために使用される。増大し続ける上記用途を前提とすると、この問題は将来悪化の一途をたどる可能性が高い。よって、低周波数帯域は、他の多くの用途が動作する帯域でもあるので、混雑しがちである。確かに、ほとんどではないものの多くの産業用、科学用、および医療用(ISM)機器が、2.4GHzのISM帯域内のRF周波数で動作する。その周波数帯域では、装置が最大出力限界を満たして動作することを条件に、オペレータがライセンスを取得する必要なく、様々な種類の機器を作動させることができる。
【0010】
おそらくより大きな問題となるのが、利用される低周波数電磁波が非常に長い波長を有するため、監視される標的の小さな変位への感度が落ちることである。精度の低下は、たとえば患者の胸壁の細かな運動が監視装置の標的である生理的な患者監視に関して特に問題となる。
【発明の開示】
【発明が解決しようとする課題】
【0011】
したがって、特に心肺活動を監視するために、干渉する可能性のある用途の周波数帯域よりも高い周波数帯域で動作可能な遠隔検出システムが必要とされる。さらに、高周波数帯域で動作しつつも、遠隔検出を有効かつ効率的に実施することのできるシステムが必要とされる。
【課題を解決するための手段】
【0012】
本発明は、周波数間の分離が高周波検知信号に関連する重大なヌルポイントの問題を緩和または排除するように、異なる周波数の2つの信号を結びつけることによって生成されるKaバンド電磁波などの両側波帯信号を用いる方法およびシステムに向けられる。本発明は、大幅に向上した検出感度を有するKaバンド電磁波を用いた細かな運動の検出を可能にする。
【0013】
本発明の一実施形態は、遠隔検知方法である。該方法は、第1の周波数成分と第2の周波数成分とを備える両側電磁波を送信することと、対象によって反射された後の電磁波を受信することを含む。該方法を用いて、第1および第2の周波数成分間の分離は、両側電磁波の一方の側波帯に対応する信号応答内のスパイクを両側電磁波の側波帯に対応する信号応答のヌルポイントにほぼ重複させる。
【0014】
本発明の別の実施形態は検知システムである。該システムは、第1および第2の周波数成分を有する両側電磁波を送信する送信機チェーンと、標的によって反射された後の両側電磁波を受信する受信機チェーンとを有する送受信機を含む。該システムは、両側電磁波から情報内容を抽出する基本帯域回路をさらに含む。さらに、該システムは、両側電磁波の一方の側波帯によって生成される信号応答内のスパイクが、両側電磁波の他方の側波帯によって生成される信号応答のヌルポイントにほぼ重複するように第1および第2の周波数成分間の分離が提供される。
【0015】
本発明のさらに別の実施形態は、心肺活動を検知するシステムである。該システムは、監視対象に検知信号を送信し、監視対象から変調信号を受信するKaバンド送受信機を含む。検知信号は、より具体的には、Kaバンド周波数帯域内の周波数を含み、変調信号は監視対象の心肺活動に基づき変調される。該システムは、変調信号に基づき、監視対象の心肺活動を示す基本帯域信号出力を生成するKaバンド送受信機に接続される基本帯域回路をさらに含む。
【0016】
本発明の別の実施形態は、機械指示を記憶する機械読取り可能記憶媒体である。記憶された指示は、第1の周波数成分と第2の周波数成分とを備える両側電磁波の送信と、対象によって反射された後の電磁波の受信を実行する。第1および第2の周波数成分間の分離は、両側電磁波の一方の側波帯に対応する信号応答内のスパイクを、両側電磁波の他方の側波帯に対応する信号応答のヌルポイントにほぼ重複させる。
【発明を実施するための最良の形態】
【0017】
現在好適である実施形態を図に示すが、本発明は図示される正確な配列や手段に限定されないと了解される。
本発明の一実施形態による遠隔検知システム100が、図1に概略的に示される。システム100は図示されるように、Kaバンド送受信機102などの送受信機と、送受信機に電気的に接続される基本帯域回路104とを含む。本明細書で説明されるように、Kaバンド送受信機は、患者や乳児などの監視対象(図示せず)に検知信号を送信し、監視対象から変調信号を受信する。より具体的には、検知信号は、Kaバンド周波数帯域内にありうる周波数を有する。変調信号は、監視対象の心肺活動に基づき変調される。
【0018】
より具体的には、Kaバンド送受信機102は受信機チェーンおよび送信機チェーンを備える。図示されるように、受信機チェーンは、受信アンテナ(Rx_Antenna)、低ノイズ増幅器(LNA)、2つのダウン変換器(Rx_Mixer1およびRx_Mixer2)、IF増幅器(IF_AMP)を含むことができる。送信機チェーンは、送信アンテナTx_Antennaと2つのアップ変換器(TX_Mixer1 および TX_Mixer2)とを含む。基本帯域回路104は図示されるように、前置増幅器(PreAMP)、帯域通過フィルタ(BPF)、および低周波数増幅器(LF_AMP)を備える。
【0019】
図示されるように、Kaバンド送受信機102が2つの電力分配器をさらに含むことに注意されたい。各電力分配器は、より具体的には、3dB電力分配器である。電力分配器は、中間周波数(IF)搬送波信号の電力を2つの成分S1(t)とS2(t)に分割する。電力の半分は送信機チェーンに供給され、残りの半分は受信機チェーンに供給される。TX_Mixer1、第1のアップ変換器の入力は、50Ω抵抗器で終点となることに注意されたい。この独自の成分の配列は、ドップラーレーダセンサとして機能するように汎用Kaバンド送受信機を変換する。
【0020】
当業者によって容易に理解されるように、Kaバンド送受信機102は上記のとおり、通常であれば直接変換受信機で発生する重大なDCオフセット問題を緩和するために2段階の変換を採用する間接変換送受信機である。この独自の利点は、間接受信機の最終段でミキサとVCOが低周波数で動作するために達成される。これにより、基本帯域でのDCオフセットとそれに関連する1/fノイズが低減される。RFおよびIF周波数は、測定における「ヌル」ポイントを回避するように調整される。
【0021】
送信アンテナも受信アンテナも、誘電率εγ=3.0で基板厚0.5mmのRogers RO3003PTFE/セラミック積層板上に製造される4X4プリントパッチアンテナアレイであってもよい。それぞれが、28GHzで12.9dBの最大アンテナゲインと、10度X10度の推定ビーム幅を有する。シングルパッチアンテナと比較して、アンテナアレイはより高い指向性ゲインを有する。これにより、システム100の検出距離は増大し、他の方向からの妨害は低減する。基本帯域回路は、たとえば、LM324低電力演算増幅器を使用して実装される。帯域通過フィルタBPFは、0.1〜10Hzに拡大可能な信号周波数を通過させる。低周波数増幅器LF_AMPと同一の周波数を有する前置増幅器PreAMPは、20〜40dBの可変ゲインを有する。
【0022】
同じLOソースが送信機と受信機に対して使用されると、距離相関効果が基本帯域でのノイズスペクトルを大幅に低減する。このため、VCOはVCO高位相ノイズにかかわらず、Kaバンドドップラーレーダにおけるソースとして使用可能である。
【0023】
本発明の一側面は、標的の細かな動きを検出するためのKaバンド電磁波などの両側波帯電磁波の使用である。Kaバンド電磁波の利用で検出感度は大幅に向上するが、重大なヌルポイントの問題が生じる。しかし、本発明の別の側面がヌルポイントの問題を克服する。より具体的には、上記のように、本発明は異なる周波数の2つの信号を組み合わせることによって生成される両側波帯Kaバンド電磁波を利用して、周波数間の分離によりヌルポイント問題を緩和または排除することができる。
【0024】
本発明で達成される高度な検出感度は、さもなければ実行不可能な細かな動きの検出を可能にする。本発明はKaバンド周波数帯域内の電磁波を利用して、たとえば、心拍および/または呼吸によって誘導される監視下の患者の胸壁の変化を検出できる。本発明の他の用途としては、嘘発見と関連する身体反応の検知、その他の種類の生物医学的検知、「塀の陰」の検知のために個々の兵士によって使用されるレーダなどのレーダ検知などが挙げられる。
【0025】
図1をまだ参照すると、本発明による2段階の信号変換を実行する際、第1の低発振器(LO1)は、周波数f1を有する信号S1(t)を生成する。第2の低発振器(LO2)は、周波数f2を有する信号S2(t)を生成する。当業者によって容易に理解されるように、S1(t)およびS2(t)の電力は、図示される3dB電力分配器などの2つの電力分配器によって分割される。電力の半分は送信機チェーンに供給され、残りの半分は受信機チェーンに供給される。
【0026】
アップ変換器(TX_Mixer)のT(t)の出力は濾波されない。したがって、出力は2つの主周波数成分、下側波帯fL=f2−f1と上側波帯fU=f2−f1とを有する。通常、第2の低発振器(LO2)からのLOの漏れから生じる、アップ変換器(TX_Mixer)の出力内のもう1つの周波数成分f2がある。
【0027】
さらに図2を参照すると、送信アンテナ(TX_Antenna)コネクタで測定される送信機の出力電力スペクトルが示されている。この特定の実施形態に関すると、下側波帯周波数と上側波帯周波数はそれぞれ、−7.210dBmと−9.64dBmの出力レベルの26.52GHzと27.64GHzである。中間の27.08GHz周波数は、アップ変換器(TX_Mixer)の非理想分離による第2の低発振器(LO2)からのLOの漏れである。LOの漏れは明白だが、本明細書で説明されるように、基本帯域信号の検出には影響を及ぼさない。
【0028】
Kaバンド送受信機102の受信機チェーンでは、受信信号R(t)は、心拍および/または呼吸がシステム100を用いて検出および監視される対象などの標的からの反射波である。受信信号R(t)は送信信号T(t)と相関関係を有するが、前者の信号の位相は監視下の患者の胸壁などの標的が時間変動した位置によって変調される。第1のダウン変換器(Rx_Mixer1)による第1のダウン変換後、受信信号R1(t)は、周波数f1での2つの変調信号、すなわち、下側波帯fL=f2−f1と上側波帯fU=f2+f1からそれぞれダウン変換された信号から成る。
【0029】
胸壁位置情報は、たとえば、周波数f1でのこれらの2つの信号の位相で変調される。さらに、受信信号R1(t)はDCオフセットと胸壁の運動情報を担持する基本帯域信号とをさらに有し、前者はLO2の漏れ送信の自己混合により、後者は受信信号R(t)のf2成分からダウン変換される。
【0030】
直接ダウン変換が実行されるとき、DCオフセットは基本帯域回路の飽和などの重大な問題をもたらす可能性がある。一方、分離を通じてLOの漏れを低下または低減させることによってDCオフセットを低減させることは、高周波ミキサでは達成し難く、その結果大きなDCオフセットを生じる。よって、本発明によると、間接変換受信機アーキテクチャが利用される。大きなDCオフセットと近傍のDC信号は、IF増幅器(IF_AMP)の帯域通過周波数反応によって除去される。したがって、以下の説明では、送信波内のf2周波数成分は、基本帯域信号に影響を及ぼさないので無視することができる。第2のダウン変換器(Rx_Mixer2)による第2のダウン変換後、出力R2(t)は、対象の胸の運動情報を担持する基本帯域信号と、帯域通過回路104で濾波される不所望の高周波スパーとから成る。
【0031】
本発明の別の実施形態によると、特別に設計および製造された2種類の低プロファイルのプリントパッチアンテナが使用されている。1つは、誘電率εγが3.2で基板厚が0.762mmの高周波基板材料GML1000上に製造されるプリントシングルパッチアンテナである。このアンテナは、30GHzで3.9dBの最大アンテナゲインと60度X80度の推定ビーム幅を達成する。
【0032】
もう1つのアンテナは、誘電率εγ=3.0で基板厚0.508mmのRogers RO3003PTFE/セラミック積層板上に製造される4X4プリントパッチアンテナアレイである。全体のサイズは20.9X28.2mm2である。本発明によるアンテナアレイは、28GHzで12.9dBの最大アンテナゲインと、10度X10度の推定ビーム幅を達成する。Kaバンド信号の送受信には他の種類のアンテナも使用することができ、これらのアンテナは共通の1つの基板上に作製される。シングルパッチアンテナと比較して、アンテナアレイはより高い指向性ゲインを有するため、検出距離が増大し、他の方向の他の無線装置からの妨害が低減される。
【0033】
システム100のさらに別の実施形態によると、基本帯域回路104は、2つのLM324低出力演算増幅器を備える。帯域通過フィルタ(BPF)は、0.1〜10Hzの通過域を有する。本実施形態による前置増幅器(PreAMP)と低周波数増幅器(LF_AMP)はいずれも、20〜40dBの可変ゲインを有する。測定段階中、IOtech Personal Daq/54(DAQモジュール)などの22ビットのUSBデータ捕捉モジュールは、基本帯域信号をサンプリングするのに使用することができる。LabVIEWプログラムなどの機械読取り可能コードは、サンプリングデータを処理し、監視対象のランダムな動きによる不所望の偽反応をさらに除去するのに使用することができる。
【0034】
この時点では、本発明の特定の理論的基盤を簡単に説明することが有益である。位相変調のみが検討されるため、普遍性を損なうことなく振幅の変動を無視することができる。したがって、第1の低発振器(LO1)および第2の低発振器(LO2)、によってそれぞれ生成される2つのLO信号S1(t)およびS2(t)は以下の式のように書くことができる。
【0035】
S1(t)=cos(2πf1t+φ1(t)) (1)
S2(t)=cos(2πf2t+φ2(t)) (2)
ただし、f1およびf2はS1(t)およびS2(t)のそれぞれの周波数、tは経過時間、φ1(t)およびφ2(t)はS1(t)およびS2(t)のそれぞれの位相ノイズである。
【0036】
送信信号T(t)が単独の周波数成分(単独の側波帯)fのみを有する場合、
T(t)=cos[2πft+φ(t)] (3)
となる。
ただし、φ(t)は送信機チェーンの信号ソースとミキサからの総合位相ノイズである。
【0037】
信号T(t)がx(t)によって与えられる時間変動する運動を伴う距離d0で標的(たとえば、患者の胸壁)によって反射し返されると、送信機と受信機間の総合移動距離は2d(t)=2d0+2x(t)である。図3は、対象の心拍および/または呼吸を検出する状況における実質的作用を概略的に示す。受信信号は
R(t)≒cos[2πft−(4πd0/λ)−(4πx(t)/λ)
+φ(t−(2d0/c))] (4)
として概算される。
ただし、cは信号の伝播速度、λは空気内の波長でc/fに等しい。
【0038】
受信信号は送信信号と同様だが、標的の距離と標的の周期的運動による位相変調とによって決定される遅延を有する。標的(たとえば、対象の胸壁)の周期的運動に関する情報は、この信号が送信信号と同じソースから得られるLO信号と混成される場合に復調することができる。このレーダトポロジは、送信機と受信機に同じ発信器を使用して、2つの信号の位相ノイズに常に相関関係を持たせるという能力を利用する。
【0039】
2段階のダウン変換後に結果として生じる基本帯域信号B(t)は
B(t)=cos[(4πd0/λ)+θ0(4πx(t)/λ)+Δφ(t)] (5)
のように概算される。
ただし、4πd0/λは標的d0への距離による一定の位相シフトであり、θ0は表面での反射と無線ブロック間の遅延による固定位相シフトである。用語Δφ(t)は距離相関効果により基本帯域では通常かなり小さな総合残余位相ノイズである。B(t)はx(t)の関数であるため、周期的な心拍および/または呼吸信号は、たとえば、B(t)から抽出することができる。
【0040】
式(5)から、基本帯域出力内の変調位相4πx(t)/λは波長に反比例する。同じ変位に関して、システム100によって提供される波長が短いほど、大きな位相変調が生成される。Kaバンドスペクトルは、11.5mm〜7.5mmの波長に相当する26GHz〜40GHzにまたがる。したがって、30GHz(λ=10mm)波によって生成される位相は、たとえば、2.4GHz(λ=125mm)での位相の12.5倍(約22dB)である。波長が短いほど小さな移動により敏感になる。これが、システム100によって提供されるKaバンド波を用いる明確な利点である。
【0041】
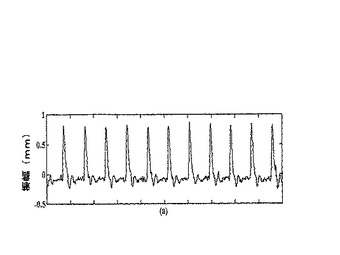
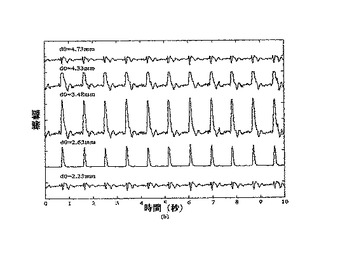
本発明の上記の理論的側面は、たとえば、心拍による対象の胸壁の運動振幅が1mmであり、その波形が図4Aに示されるように、指先センサの参照心拍信号から修正されると仮定することによって、対象の心拍および/または呼吸の検出または監視に対してモデル化およびシミュレーション化することができる。Δφ(t)を無視し、θ0を一定にすると、図4Bに示されるように、基本帯域信号B(t)は、波長λが10mm(30GHz)に等しいとき距離d0に応じて変動する。図4Bに示されるように、B(t)の振幅は、最大から最小まで周期的に変化する。B(t)の振幅がd0=2.23mmで最小に達すると、信号はほとんどノイズ中に覆い隠されてしまうという事実により、心拍信号を検索することが困難な可能性がある。B(t)の振幅が最小である距離は、ここではヌルポイントと称する。概して、感度測定を行う際にヌルポイントを引き起こす距離によって、検知システムと標的が分離されると、検出感度は最も低く、したがってセンサは最も低い検出精度を有する。
【0042】
逆の状況で、B(t)の振幅がd0=3.48mmで最大になると、心拍に対応する速度プロファイルが図4Aに示される元の信号と同じ形状を有するため、正確な心拍速度を検出するのがさほど困難ではない。最大であるB(t)の振幅を生じるレーダシステムと標的とを分離する距離は、ここでは最適ポイントと称する。これにより、検出感度と検出精度が大幅に向上した測定が提供される。
【0043】
図5は、単側波帯送信波に関するレーダシステムから対象への距離に沿ったヌルポイントと最適ポイントの分布を示す。30GHz波の場合、隣接するヌルポイントと最適ポイント間の距離はわずかに1.25mm(λ/8)で、ほぼ胸壁の運動程度である。この距離は通常小さすぎるため、十分に有効な測定値を容易に得ることができない。
【0044】
検知システムが単音Kaバンド波を送信する場合、検出精度は対象のごくわずかな動きで大幅に変動し、この状況下で所望の検出精度を達成することは極めて困難である。したがって、レーダシステムは単音波のみを送信する場合、高周波で適切に動作しない。
【0045】
本発明によると、両側波帯波を利用することによってヌルポイントの問題が解決される。システム100は、送信信号T(t)として2つのKaバンド周波数成分fLおよびfUを有するKaバンド波を利用する。したがって、受信信号R(t)は2つの周波数成分fLおよびfUも有する。以下、BL(t)とBU(t)はそれぞれfLおよびfU周波数成分から配信される基本帯域信号を表す。したがって、以下の式が当てはまる。
【0046】
B(t)=BL(t)+BU(t) (6)
BL(t)=cos[θL+(4πx(t)/λL)+ΔφL(t)] (7)
BU(t)=cos[θU+(4πx(t)/λU)+ΔφU(t)] (8)
θL=(4πd0/λL)+θ0L ,θU=(4πd0/λU)+θ0U (9)
ただし、λLおよびλUはそれぞれ下側波帯の波長および上側波帯の波長である。波長λLおよびλUはそれぞれc/fLおよびc/fUに等しい。用語θLおよびθUは上記したように、ヌルポイントの位置と距離を決定する位相シフトである。
【0047】
上記の説明から、BL(t)またはBU(t)のいずれかは重大なヌルポイントの問題を抱え、信頼のおける検出を提供できない。しかし、BL(t)およびBU(t)が同時に存在する場合、B(t)はBL(t)およびBU(t)の重畳である。BL(t)およびBU(t)は類似しているが、両者間に位相差はある。本発明によると、位相差が適切に調整されると、基本帯域出力B(t)はBL(t)またはBU(t)のみの場合ほどヌルポイントの問題は大きくない。さらに図6を参照すると、両側波帯波に関するヌルポイントと最適ポイントの分布が概略的に示されている。LO1の周波数f1が適切に調整されると、下側波帯からのヌルポイントと上側波帯からの最適ポイント、またはその逆が互いに重複させられる。
【0048】
一方の側波帯からのヌルポイントが他方の側波帯からの最適ポイントに重複するとき、検出精度が大幅に向上することに注意されたい。すなわち、下側波帯からのヌルポイントと上側波帯からの最適ポイントが重複する場合に、検出精度が大幅に向上する。下側波帯からの最適ポイントと上側波帯からのヌルポイントが重複する場合も同様に、検出精度が大幅に向上する。
【0049】
式(7)および(8)の残余ノイズΔφL(t)およびΔφU(t)は、距離相関効果によるθと位相変調 4πx(t)/λと比べてかなり小さい。したがって、普遍性を損なうことなく以下の説明ではその効果は無視される。λLは非常にλUに近いため、位相変調4πx(t)/λLおよび4πx(t)/λUはほぼ等しい振幅を有する。
【0050】
θLおよびθUがπの偶数倍だけ分離されるとき、BU(t)とBU(t)は同相で同期される。したがって、B(t)は、BL(t)またはBU(t)のいずれかにより与えられるのと同じ位置でほぼ同じ最適ポイントとヌルポイントを生じさせ、検出精度を低下させる密な間隔のヌルポイントと同様の問題を有する。
【0051】
θLおよびθUがπの奇数倍だけ分離されるとき、BL(t)およびBU(t)は位相がずれている。BL(t)およびBU(t)はほぼ同じ振幅だが位相が逆であるため、互いを相殺する。したがって、B(t)の振幅は相当小さく検出しづらい。
【0052】
その結果、θLとθU間の位相差がπの整数倍であるとき、新たなヌルポイント状況が測定で生じる。単側波帯波のヌルポイントが局所ヌルポイントとして定義されれば、この新たなヌルポイント状況は大域ヌルポイントとして定義される。この大域ヌルポイントでは、検出精度が最も低い。位相差は
θU−θL=(4πd0/λU)−(4πd0/λL)+Δθ0=kπ,k=0,±1,±2,... (10)
である。
ただし、
Δθ0=θ0U−θ0L (11)
λL=c/fL、λU=c/fUを代入すると、以下の
fU−fL=(c/4πd0)(kπ−Δθ0),=0,±1,±2,... (12)
を生じる。
式(12)にfU=f2+f1およびfL=f2−f1を代入すると、
f1=(k/d0)・37.5MHz−(c/8πd0)・Δθ0,k=0,±1,±2,...
(13)
を生じる。
ただし、d0は距離である。
【0053】
θLおよびθUがπ/2の奇数倍で分離されるとき、BL(t)およびBU(t)は直角位相である。BL(t)とBU(t)のうち少なくとも1つはヌルポイントにない。ヌルポイントにないものは、最終出力B(t)を決定する。したがって、この場合、検出精度全体が高くなる。このポイントが大域最適ポイントと定義される。
【0054】
したがって、θUおよびθL間の差は
θU−θL=(4πd0/λU)−(4πd0/λL)+Δθ0=kπ,k=0,±1,±2,...
(14)
である。
式(10)〜(13)によって記載されるプロセスを繰り返すと、
f1=(2k+1/d0)18.75MHz−(c/8πd0)Δθ0,k=0,±1,±2,...
(15)
を生じる。
【0055】
上記の分析が示すように、対象の位置が固定されると、この位置はf1周波数を適切に選択することによって大域最適ポイントまたは大域ヌルポイントに設定することができる。たとえば、f1周波数で、d0=1mの対象位置が偶然ヌルポイントである場合、式(13)および(15)に従いf1がf1±(2k+1)x18.75MHzに調整されれば、このヌルポイントは最適ポイントに変更することができる。したがって、対象の位置を動かさずにf1周波数を調節することによって、常に最適ポイントで正確な検出を行うことができる。
【0056】
f1周波数が固定されると、2つの基本帯域信号の重複のため、両側波帯波に関する大域ヌルポイントおよび最適ポイントの分布は単基本帯域の場合と異なる式、(13)および(15)は、
d0=(k/8)λ1−(λ1/8π)・Δθ0,k=0,±1,±2,... (16)
と
d0=((2k+1)/16))・λ1−(λ1/8π)・Δθ0,k=0,±1,±2,...
(17)
にそれぞれ書き換えることができる。式(16)および(17)から、ヌルポイントはλ1/8毎に発生し、最適ポイントも同様である。さらに、隣接するヌルポイントと最適ポイントはλ1/16で分離される。両側波帯波に関するヌルポイントおよび最適ポイントの分布を図7に示す。
【0057】
通常、周波数f1は周波数f2よりもずっと低いので、隣接する大域ヌルポイントと大域最適ポイント間の距離はずっと長い。Kaバンド周波数よりもずっと小さなf1=500MHzの場合、ヌルポイントは単30GHz波の場合の2.5mmよりもずっと長い75mm毎に生じるので、レーダの位置を調整することにより、信頼のおける検出精度を得て、ヌルポイントを回避することができる。
【0058】
式(16)および(17)は、周波数f1が低いほど、結果として生じるヌルポイントがさらに離れることを示唆している。よって、ヌルポイントの問題は、非常に低いf1で解決される。しかし、周波数f1が小さすぎる場合、ヌルポイントはかなり長距離にわたり局所ヌルポイントによって支配される。図8A〜8Cは、f2=27.1GHzのときのf1=500MHz、f1=50MHz、およびf1=5MHzのそれぞれに関する局所ヌルポイントおよび大域ヌルポイントの様々な分布を示す。距離は横軸に示され、信号の正規化振幅は縦軸に示される。信号が谷にぶつかると、振幅は最も小さいので、検出精度は最も低い。細実線と細点線はそれぞれ、基本帯域信号BL(t)およびBU(t)に関する局所ヌルポイントと最適ポイントの分布を表す。BL(t)およびBU(t)の振幅は送受信機における周波数反応の平坦度のせいでほとんど差異がないかもしれないが、分析の都合上、ここでは同一の振幅を仮定する。
【0059】
図からすると、最も近い局所ヌルポイント(谷)の分離は約2.5mmである。太実線は、B(t)に関する大域ヌルポイントと最適ポイントの分布を示す。f1=500MHzのとき、大域ヌルポイントの分離は図8Aに示されるように75mmである。しかし、f1=5MHzの場合、大域ヌルポイントの分離は7.5mである。図8(c)に示されるように、全体が0.1mの範囲では、B(t)はBL(t)およびBU(t)と同じヌルポイントおよび最適ポイントを有し、質的に大域ヌルポイントとして予め定義されている。量的には、B(t)に関する信号谷の振幅がBL(t)またはBU(t)のいずれかのピーク振幅の20%に満たない場合、B(t)を大域ヌルポイント領域と定義する。この定義によると、B(t)は、f1=5MHzの場合約1m、50MHzの場合0.1m、500MHzの場合0.01mの長さの大域ヌルポイント領域にとどまる。
【0060】
測定におけるこのヌルポイント問題を克服し、高い検出精度を得るには、レーダ位置を移動させる、あるいはf1周波数を変更することによって最適ポイントまたはその近傍で測定を行う方が適切である。5MHzほど低いLO1周波数の場合、レーダが最も近い最適ポイントに到達するように3mもの距離を移動することが困難であるため、唯一の方法はLO1周波数を調節することである。
【0061】
Kaバンド波の場合、長距離間の信号損失は低周波数よりもずっと高い。受信機で同じ出力レベルの場合、Kaバンド波の伝播距離はずっと短くなる。この測定では、低出力送信を用いて、距離が2.5mまで増加すると、検出精度が急速に低下し始める。ヌルポイントがd0=2.5mで発生すれば、このヌルポイントを最適ポイントに切り換え、f1周波数は式(15)に従い最低7.5MHzで変更させる必要がある。ヌルポイントがd0=0.1mで発生する場合、最も小さな調整ステップは、第1の低発振器(LO1)のかなり大きな調整範囲である187.5MHzとなる。したがって、f1周波数とVCO調整範囲の選択は、ヌルポイントがシステム100に近い距離で出現するとき、一緒に検討される。したがって、450MHz〜800MHzVCOのシステム100の調整範囲は好ましくは、f1ソースとして選択される。同時に、このVCO周波数は約75mmのヌルポイント分離を提供するため、標的に対するシステム100の位置を調節することによってヌルポイントを回避する可能性も提供する。
【0062】
検出精度が非常に低いとき、システム100がヌルポイントにより引き起こされる誤った警告を検出しているのか、あるいは、監視対象に対する警告などの実際に重要な結果を検出しているのかを判定するのが困難であるという問題が生じる。この状況下で、標的に対するシステム100の位置を調節する、あるいは周波数f1を変更することによって検出精度を大幅に向上させることができるならば、それはヌルポイントによる誤った警告を意味する。さもなければ、患者の監視の背景では、たとえば、患者の心肺に問題があることを示す。
【0063】
上記のように、検出精度は概して、ヌルポイント、最適ポイント、またはその間のどこかである、システムに対する標的の位置に左右される。しかし、システム100は、周波数f1を調整することによって最適な反応を得ることができる。したがって、システム100はシステムに対する標的の位置に関係なく、高い検出精度を達成する。
【0064】
図9は、本発明の別の実施形態による周波数分離ユニット900の概略図である。周波数分離ユニット900は、標的検知に使用される両側波帯Kaバンド電磁波の第1の周波数成分f1および第2の周波数成分f2間の所望の分離を判定する。図示されるように、周波数分離ユニット900は、相互に通信する周波数判定モジュール902、精度評価モジュール904、および周波数制御モジュール906を備える。
【0065】
動作上、周波数判定モジュール902は、両側波帯Kaバンド電磁波に対応する信号S(t)を受信する。たとえば、両側波帯Kaバンド電磁波は、モジュールに直接供給する。もしくは、両側波帯Kaバンド電磁波の物理パラメータを表す信号を供給する。両側波帯Kaバンド電磁波の検出精度を表し、第1および第2の周波数成分f1、f2の分離における調節が保証されているかどうかを判定する信号R(t)が精度判定モジュール904に供給される。保証されていれば、周波数制御モジュール906は、上記したように、所望の周波数分離を実行し、両側波帯Kaバンド電磁波の検知精度を向上させるために、両周波数成分の一方または両方の変更を生じさせる制御信号C(t)を供給する。
【0066】
より具体的には、上記したように、検知精度は、両側波帯Kaバンド電磁波の一方の側波帯によって誘発される信号応答の最適ポイントが2つの周波数成分間の分離により、両側波帯Kaバンド電磁波の他方の側波帯によって誘発される信号応答のヌルポイントと完全にあるいはほぼ重複するように、周波数成分f1およびf2の一方または両方を調節することによって大幅に高められる。
【0067】
より一般的ではあるが、本明細書に記載される技術と同様、両側波帯Kaバンド電磁波の一方の側波帯によって誘発される信号応答のスパイクが他方の側波帯によって誘発される信号応答のヌルポイントと完全にあるいはほぼ重複する場合、検出精度が向上することを理解すべきである。また、本発明によると、周波数成分間の所望の分離を得るように両周波数成分f1およびf2の一方または両方を調節することによってこれが達成される。本明細書に定義されるように、スパイクは、所定の閾値を超える信号応答である。
【0068】
周波数分離ユニット900の例示のモジュールはそれぞれ、配線回路および/または機械読取り可能コード内に実装することができる。好ましくは、周波数分離ユニット900は上記の検知システム100に組み込まれる、あるいは接続される(図1を参照)。
【0069】
図10は、本発明のさらに別の実施形態による、標的を遠隔検知するための方法1000の例示ステップを示すフローチャートである。該方法は、ステップ1002では、第1の周波数成分と第2の周波数成分とを備える両側Kaバンド電磁波を送信することを含む。ステップ1004では、該方法1000は、次に、Kaバンド対象によって反射された後の電磁波を受信する。第1および第2の周波数成分間の分離によって、上記したように、両側Kaバンド信号の側波帯に対応する各最適ポイントは、両側Kaバンド信号の異なる側波帯に対応する各ヌルポイントとほぼ重複させられる。該方法は1006で完了する。
【0070】
図11は、本発明のさらに別の実施形態による、標的を遠隔検知するために使用される両側波帯Kaバンド電磁波の周波数成分の分離を判定する方法1000の例示ステップを示すフローチャートである。該方法は、両側波帯Kaバンド電磁波の第1および第2の周波数成分の少なくとも一方を調節するステップ1102を含む。両側波帯Kaバンド電磁波は、ステップ1104で送信される。送信波はステップ1106で反射され受信されて、その後、波の検出精度がステップ1108で評価される。検出精度が所定の閾値または基準により許容不能である場合、許容可能な精度が得られるまで先行するステップが繰り返される。許容可能な精度が得られると、該方法はステップ1110で完了する。
【0071】
より具体的には、該方法によると、周波数間の分離が、一方の側波帯からの最適ポイントを両側波帯Kaバンド電磁波の他方の側波帯のヌルポイントとほぼまたは完全に重複させるように、第1および第2の周波数f1およびf2の一方または両方を調節する。より具体的には、上記したように、両周波数の一方または両方が、一方の側波帯からのスパイクをKaバンド電磁波の他方の側波帯からのヌルポイントと完全にあるいはほぼ重複させる周波数間の分離を実行するように調節される場合、検出周波数が向上する。
【0072】
上記したように、本発明は、診断や患者または病人の心拍および呼吸の監視など、医療分野において幅広い用途を有する。しかし、本発明は、様々な非医学的用途も有する。図12は、乳児または幼児1200の心拍または呼吸の監視に関する、本発明のさらに別の実施形態による用途を概略的に示す。図示されるように、遠隔検知システム100は、上記したとおり、乳児モニタ1202に組み込まれる、あるいは接続される。システム100は乳児監視システムとして機能し、信号1204を乳児1200に送信し、反射信号1206を乳児から受信する。上記したように、システム100は乳児の心拍を監視するように乳児1200の胸の動きを検出する。
【0073】
当業者によって容易に理解されるように、システム100は一体化チップに実装され、乳児モニタ1202のハウジング内に格納することができる(システム100によって使用される相対的に低い電力とKaバンド内の信号の短波長とは、従来装置よりもサイズが大幅に低減されたアンテナの使用を可能にし、システムがこのように実装される理由の1つである)。別の実施形態では、システム100は、ラップトップ、携帯電話、またはその他の携帯型装置内に設置することができる。さらに、システム100は、送信され反射された信号1204、1206をラップトップ、携帯電話、またはその他の携帯型装置の画面上に心電図画像を生成するためにデジタル形式に変換するハードウェアおよび/または ソフトウェアを備える。
【0074】
さらに別の実施形態によると、乳児モニタ1200は、システム100に接続される送信機(明確には図示せず)を含む。送信機はシステム100の出力を受信し、乳児モニタ1200から離れた無線装置にその出力を送信する。システム100の出力は、たとえば、心電図画像やその他の監視情報を表示可能な画面を有する携帯電話またはラップトップに送信する。本実施形態は、両親や看護婦が乳児を綿密に監視しつつ、乳児室から離れた場所で動き回ることができるという利点を提供する。
【0075】
本発明のさらに別の実施形態による本発明の別の非医学的用途を図13に概略的に示す。本実施形態によると、システム100は実行モニタとしての役割を果たす。システム100は図示されるように、トレッドミル1302などの実行装置またはその近傍に搭載されるハウジング1300内に格納される。拡張実行期間中に実行に従事している、あるいは休止している人物1304の近傍に配置された場合、システム100はその人物の心拍および/または呼吸を監視することができる。他の実施形態は、たとえば、病院などの医療施設に位置する人物の監視や研究所などの施設に配置される動物の監視を含む。
【0076】
本発明はいくつかの独自の利点を提供する。1つの利点は、Kaバンド周波数スペクトルが控えめにしか利用されないため、システムが他の用途からの妨害を受けるリスクを低減することである。
【0077】
もう1つの利点は、これらの周波数での信号の波長が短くなるほど、小さな変位により敏感になることである。基本帯域出力内での変調位相は、波長に反比例する。よって、同じ変位に関しては、波長が短いほど位相変調が大きくなる。たとえば、システムが26GHz〜40GHzの周波数帯域で作動される場合、対応する波長は11.5mm〜7.5mmである。したがって、30GHz波(対応する波長は10mm)によって生成される位相は、2.4GHz(対応する波長は125mm)の場合の位相の12.5倍、すなわち、約22dBである。
【0078】
本発明を実施する際に使用される短波長からはさらに別の利点が生じる。Kaバンド内の信号の波長が短いほど、たとえば、従来装置よりも大幅にサイズを低減したアンテナの使用が可能になる。実際、上記したように、本明細書に記載されるサイズは、チップ上に統合できるほど小型である。
【0079】
Kaバンド内の両側波帯信号を用いて本発明を実施する特別の利点のいくつかを説明してきた。しかしながら、本発明はKaバンド内の信号を用いる状況で主に説明されているが、本発明がこの点に限定されないことは明白である。事実、本明細書に記載される発明はKaバンドを超える周波数を用いても実行可能であることは明白である。よって、周波数がKaバンド内にある両側波帯信号を使用することは特定の利点を有する一方で、本発明はKaバンド内およびKaバンドを超える周波数を有する両側波帯信号に適用される。
【0080】
本発明は、ハードウェア、ソフトウェア、またはハードウェアとソフトウェアの組み合わせで実現することができる。本発明は、1つのコンピュータシステムで集中的に、あるいは様々な構成要素を相互接続したコンピュータシステムに展開させて分散的に実現することができる。本明細書に記載される方法を実行するのに適した任意の種類のコンピュータシステムまたはその他の装置が好適である。ハードウェアとソフトウェアの典型的な組み合わせがコンピュータプログラムを備えた汎用コンピュータシステムであって、該プログラムはロードされ実行される際に、本明細書に記載される方法を実行するようにコンピュータシステムを制御する。
【0081】
本発明は、本明細書に記載される方法の実行を可能にする全ての特徴を備え、コンピュータシステムにロードされる際にこれらの方法を実行することのできるコンピュータプログラム製品に組み込まれることができる。この状況でのコンピュータプログラムは、任意の言語、コード、または表記で、情報処理能力を有するシステムに、特定の機能を直接、あるいはa)別の言語、コード、または表記への変換、b)異なる素材形式での再生のいずれか、または両方の後に実行させることを目的とした1組の指示を表示することを意味する。
【0082】
本発明は、その精神または必須の特性から逸脱せずに他の形式で具体化させることができる。したがって、上記の説明ではなく下記の請求項を、本発明の範囲を示すものとして参照すべきである。
【図面の簡単な説明】
【0083】
【図1】本発明の一実施形態による心肺活動の遠隔検知システムの概略図である。
【図2】図1に示される検知システムで生成される出力スペクトルの表示例である。
【図3】図1に示される検知システムの動作側面の概略図である。
【図4A】本発明の別の実施形態による検知システムの動作をシミュレートする、モデル心拍信号および模擬基本帯域信号のそれぞれの振幅対時間グラフの例である。
【図4B】本発明の別の実施形態による検知システムの動作をシミュレートする、モデル心拍信号および模擬基本帯域信号のそれぞれの振幅対時間グラフの例である。
【図5】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図6】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図7】一連の最適ポイントおよびヌルポイントのそれぞれの間の距離を示す概略図である。
【図8A】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図8B】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図8C】本発明のさらに別の実施形態による検知システムの動作をシミュレートする振幅対距離グラフの例である。
【図9】本発明のさらに別の実施形態による周波数分離ユニットの概略図である。
【図10】本発明のさらに別の実施形態による、標的を遠隔検知する方法のステップの例を示すフローチャートである。
【図11】本発明のさらに別の実施形態による、標的を遠隔検知するために使用される両側波帯Kaバンド電磁波の周波数成分分離を判定する方法のステップの例を示すフローチャートである。
【図12】本発明のさらに別の実施形態による乳児モニタの概略図である。
【図13】本発明のさらに別の実施形態による実行モニタの概略図である。
【特許請求の範囲】
【請求項1】
遠隔検知方法であって、
第1の周波数成分および第2の周波数成分を含む両側電磁波を送信すること、
対象によって反射された後に該電磁波を受信すること
を備え、
該第1および第2の周波数成分間の分離により、両側電磁波の一方の側波帯に対応する信号応答内のスパイクが、両側電磁波の他方の側波帯に対応する信号応答のヌルポイントに実質上重複する、遠隔検知方法。
【請求項2】
前記スパイクが最適ポイントを備えることを特徴とする請求項1に記載の方法。
【請求項3】
前記スパイクを前記ヌルポイントに実質上重複させる前記第1および第2の周波数成分間の分離を判定することをさらに備える、請求項1に記載の方法。
【請求項4】
前記第1および第2の周波数成分の少なくとも一方を調節して、前記スパイクを前記ヌルポイントに実質上重複させる分離を実行することをさらに備える、請求項1に記載の方法。
【請求項5】
前記分離を判定するステップが、それぞれが異なる分離に対応する複数の検出感度測定値をサンプリングすること、最大の検出感度を生じる分離を前記異なる分離の中から選択することを備える、請求項4に記載の方法。
【請求項6】
前記第1の周波数成分に等しい周波数を有する第1の信号と前記第2の周波数成分に等しい異なる周波数を有する第2の信号とを乗算することによって前記両側電磁波を生成することをさらに備える、請求項1に記載の方法。
【請求項7】
前記第1および第2の周波数成分が、電磁スペクトルのKaバンド内の周波数を有する、請求項1に記載の方法。
【請求項8】
検知システムであって、
送受信器であって、
第1および第2の周波数成分を有する両側電磁波を送信する送信機チェーンと、
標的によって反射された後に、該両側電磁波を受信する受信機チェーンと
を含む送受信機と、
該両側電磁波から情報内容を抽出する基本帯域回路と、
を備え、
該第1および第2の周波数成分間の分離は、該両側電磁波の一方の側波帯によって生成される信号応答内のスパイクを、該両側電磁波の他方の側波帯によって生成される信号応答のヌルポイントに実質上重複させる、検知システム。
【請求項9】
前記スパイクが最適ポイントである、請求項8に記載のシステム。
【請求項10】
前記受信機チェーンが2段階の間接変換受信機アーキテクチャに従って構成される、請求項に記載8のシステム。
【請求項11】
前記標的が監視下の患者である、請求項8のシステム。
【請求項12】
周波数判定ユニットをさらに備える、請求項8に記載のシステム。
【請求項13】
前記周波数判定ユニットが、周波数判定モジュール、精度評価モジュール、および周波数制御モジュールのうちの少なくとも1つを備える、請求項12に記載のシステム。
【請求項14】
前記システムが乳児モニタを備える、請求項8のシステム。
【請求項15】
前記システムが実行期間に従事する個人を監視するための実行モニタを備える、請求項8に記載のシステム。
【請求項16】
機械可読記憶媒体であって、
第1の周波数成分と第2の周波数成分を有する両側電磁波を送信すること、
対象によって反射された後に、該電磁波を受信すること
のための機械指示命令とを備え、
該第1および第2の周波数成分間の分離により、該両側電磁波の一方の側波帯に対応する信号応答内のスパイクが、該両側電磁波の他方の側波帯に対応する信号応答のヌルポイントに実質上重複する、記憶媒体。
【請求項17】
前記スパイクが最適ポイントであることを特徴とする請求項16に記載の記憶媒体。
【請求項18】
該第1および第2の周波数成分の少なくとも一方を調整して、前記スパイクを前記ヌルポイントに実質上重複させる分離を実行するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項19】
前記スパイクを前記ヌルポイントに実質上重複させる前記第1および第2の周波数成分間の前記分離を判定するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項20】
前記分離を判定する前記機械指示命令が、それぞれが異なる分離に対応する複数の検出感度測定値をサンプリングし、最大の検出感度を生じる分離を異なる分離から選択する命令を備えること、請求項19に記載の記憶媒体。
【請求項21】
前記第1の周波数成分に等しい周波数を有する第1の信号と前記第2の周波数成分に等しい異なる周波数を有する第2の信号とを乗算することによって両側電磁波を生成するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項22】
心肺活動の検知システムであって、
検知信号を監視対象に送信し、該監視対象から変調信号を受信するKaバンド送受信機であって、Kaバンド周波数帯域内の周波数を有する該検知信号と該変調信号とが該監視対象の心肺活動に基づき変調される、Kaバンド送受信機と、
該Kaバンド送受信機に接続され、該監視対象の該心肺活動の該変調信号と指標とに基づき、基本帯域信号出力を生成する基本帯域回路と
を備える、心肺活動の検知システム。
【請求項23】
前記基本帯域信号出力を処理する前記基本帯域回路に接続される信号プロセッサをさらに備える、請求項22に記載のシステム。
【請求項24】
前記基本帯域信号出力をデジタル化するために、前記基本帯域回路および前記信号プロセッサ間に接続される信号デジタイザをさらに備える、請求項23に記載のシステム。
【請求項25】
前記Kaバンド送受信機が、潜在的なDCオフセット問題を緩和するため前記Kaバンド送受信機によって受信された後に前記変調信号の2段階の変換を実行する間接変換送受信機を備える、請求項22に記載のシステム。
【請求項26】
前記Kaバンド送受信機が
送信機チェーンと、
受信機チェーンと、
送信機チェーンおよび受信機チェーンの異なる位置間に電気的に接続され、前記送信機チェーンおよび前記受信機チェーン間の搬送波信号の電力を分割する、第1および第2の電力分配器とを備える、請求項21に記載のシステム。
【請求項27】
前記第2の電力分配器に接続される電圧制御発振器をさらに備え、
前記送信機チェーンが
検知信号が送信される送信アンテナと、
該搬送波信号と検知信号とを混合する第1および第2のアップ変換器と、
を備え、
該第1のアップ変換器が第1の電力分配器に接続され、第2のアップ変換器が第2の電力分配器に接続される、請求項26に記載のシステム。
【請求項28】
前記第2の電力分配器に接続される電圧制御発振器をさらに備え、前記受信機チェーンが
前記変調信号が受信される受信アンテナと、
前記搬送波信号を検知信号に混合する第1および第2のダウン変換器と、
を備え、
該第1のダウン変換器が前記第2の電力分配器に接続され、該第2のダウン変換器が前記第1の電力分配器に接続される、請求項26に記載のシステム。
【請求項29】
前記受信アンテナおよび前記第1のダウン変換器間に接続される低ノイズ増幅器と、前記第1のダウン変換器および前記第2のダウン変換器間に接続される中間周波数増幅器とをさらに備える、請求項27に記載のシステム。
【請求項30】
前記基本帯域回路が、前置増幅器、該前置増幅器に接続される帯域通過フィルタ、および該帯域通過フィルタに接続される低周波数増幅器を備える、請求項に記載22のシステム。
【請求項1】
遠隔検知方法であって、
第1の周波数成分および第2の周波数成分を含む両側電磁波を送信すること、
対象によって反射された後に該電磁波を受信すること
を備え、
該第1および第2の周波数成分間の分離により、両側電磁波の一方の側波帯に対応する信号応答内のスパイクが、両側電磁波の他方の側波帯に対応する信号応答のヌルポイントに実質上重複する、遠隔検知方法。
【請求項2】
前記スパイクが最適ポイントを備えることを特徴とする請求項1に記載の方法。
【請求項3】
前記スパイクを前記ヌルポイントに実質上重複させる前記第1および第2の周波数成分間の分離を判定することをさらに備える、請求項1に記載の方法。
【請求項4】
前記第1および第2の周波数成分の少なくとも一方を調節して、前記スパイクを前記ヌルポイントに実質上重複させる分離を実行することをさらに備える、請求項1に記載の方法。
【請求項5】
前記分離を判定するステップが、それぞれが異なる分離に対応する複数の検出感度測定値をサンプリングすること、最大の検出感度を生じる分離を前記異なる分離の中から選択することを備える、請求項4に記載の方法。
【請求項6】
前記第1の周波数成分に等しい周波数を有する第1の信号と前記第2の周波数成分に等しい異なる周波数を有する第2の信号とを乗算することによって前記両側電磁波を生成することをさらに備える、請求項1に記載の方法。
【請求項7】
前記第1および第2の周波数成分が、電磁スペクトルのKaバンド内の周波数を有する、請求項1に記載の方法。
【請求項8】
検知システムであって、
送受信器であって、
第1および第2の周波数成分を有する両側電磁波を送信する送信機チェーンと、
標的によって反射された後に、該両側電磁波を受信する受信機チェーンと
を含む送受信機と、
該両側電磁波から情報内容を抽出する基本帯域回路と、
を備え、
該第1および第2の周波数成分間の分離は、該両側電磁波の一方の側波帯によって生成される信号応答内のスパイクを、該両側電磁波の他方の側波帯によって生成される信号応答のヌルポイントに実質上重複させる、検知システム。
【請求項9】
前記スパイクが最適ポイントである、請求項8に記載のシステム。
【請求項10】
前記受信機チェーンが2段階の間接変換受信機アーキテクチャに従って構成される、請求項に記載8のシステム。
【請求項11】
前記標的が監視下の患者である、請求項8のシステム。
【請求項12】
周波数判定ユニットをさらに備える、請求項8に記載のシステム。
【請求項13】
前記周波数判定ユニットが、周波数判定モジュール、精度評価モジュール、および周波数制御モジュールのうちの少なくとも1つを備える、請求項12に記載のシステム。
【請求項14】
前記システムが乳児モニタを備える、請求項8のシステム。
【請求項15】
前記システムが実行期間に従事する個人を監視するための実行モニタを備える、請求項8に記載のシステム。
【請求項16】
機械可読記憶媒体であって、
第1の周波数成分と第2の周波数成分を有する両側電磁波を送信すること、
対象によって反射された後に、該電磁波を受信すること
のための機械指示命令とを備え、
該第1および第2の周波数成分間の分離により、該両側電磁波の一方の側波帯に対応する信号応答内のスパイクが、該両側電磁波の他方の側波帯に対応する信号応答のヌルポイントに実質上重複する、記憶媒体。
【請求項17】
前記スパイクが最適ポイントであることを特徴とする請求項16に記載の記憶媒体。
【請求項18】
該第1および第2の周波数成分の少なくとも一方を調整して、前記スパイクを前記ヌルポイントに実質上重複させる分離を実行するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項19】
前記スパイクを前記ヌルポイントに実質上重複させる前記第1および第2の周波数成分間の前記分離を判定するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項20】
前記分離を判定する前記機械指示命令が、それぞれが異なる分離に対応する複数の検出感度測定値をサンプリングし、最大の検出感度を生じる分離を異なる分離から選択する命令を備えること、請求項19に記載の記憶媒体。
【請求項21】
前記第1の周波数成分に等しい周波数を有する第1の信号と前記第2の周波数成分に等しい異なる周波数を有する第2の信号とを乗算することによって両側電磁波を生成するための機械指示命令をさらに備える、請求項16に記載の記憶媒体。
【請求項22】
心肺活動の検知システムであって、
検知信号を監視対象に送信し、該監視対象から変調信号を受信するKaバンド送受信機であって、Kaバンド周波数帯域内の周波数を有する該検知信号と該変調信号とが該監視対象の心肺活動に基づき変調される、Kaバンド送受信機と、
該Kaバンド送受信機に接続され、該監視対象の該心肺活動の該変調信号と指標とに基づき、基本帯域信号出力を生成する基本帯域回路と
を備える、心肺活動の検知システム。
【請求項23】
前記基本帯域信号出力を処理する前記基本帯域回路に接続される信号プロセッサをさらに備える、請求項22に記載のシステム。
【請求項24】
前記基本帯域信号出力をデジタル化するために、前記基本帯域回路および前記信号プロセッサ間に接続される信号デジタイザをさらに備える、請求項23に記載のシステム。
【請求項25】
前記Kaバンド送受信機が、潜在的なDCオフセット問題を緩和するため前記Kaバンド送受信機によって受信された後に前記変調信号の2段階の変換を実行する間接変換送受信機を備える、請求項22に記載のシステム。
【請求項26】
前記Kaバンド送受信機が
送信機チェーンと、
受信機チェーンと、
送信機チェーンおよび受信機チェーンの異なる位置間に電気的に接続され、前記送信機チェーンおよび前記受信機チェーン間の搬送波信号の電力を分割する、第1および第2の電力分配器とを備える、請求項21に記載のシステム。
【請求項27】
前記第2の電力分配器に接続される電圧制御発振器をさらに備え、
前記送信機チェーンが
検知信号が送信される送信アンテナと、
該搬送波信号と検知信号とを混合する第1および第2のアップ変換器と、
を備え、
該第1のアップ変換器が第1の電力分配器に接続され、第2のアップ変換器が第2の電力分配器に接続される、請求項26に記載のシステム。
【請求項28】
前記第2の電力分配器に接続される電圧制御発振器をさらに備え、前記受信機チェーンが
前記変調信号が受信される受信アンテナと、
前記搬送波信号を検知信号に混合する第1および第2のダウン変換器と、
を備え、
該第1のダウン変換器が前記第2の電力分配器に接続され、該第2のダウン変換器が前記第1の電力分配器に接続される、請求項26に記載のシステム。
【請求項29】
前記受信アンテナおよび前記第1のダウン変換器間に接続される低ノイズ増幅器と、前記第1のダウン変換器および前記第2のダウン変換器間に接続される中間周波数増幅器とをさらに備える、請求項27に記載のシステム。
【請求項30】
前記基本帯域回路が、前置増幅器、該前置増幅器に接続される帯域通過フィルタ、および該帯域通過フィルタに接続される低周波数増幅器を備える、請求項に記載22のシステム。
【図1】

【図2】

【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【図11】
【図12】
【図13】
【公表番号】特表2008−536621(P2008−536621A)
【公表日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願番号】特願2008−507690(P2008−507690)
【出願日】平成18年3月31日(2006.3.31)
【国際出願番号】PCT/US2006/012254
【国際公開番号】WO2006/115704
【国際公開日】平成18年11月2日(2006.11.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(508055353)ユニバーシティ オブ フロリダ リサーチ ファンデーション、インク. (10)
【Fターム(参考)】
【公表日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願日】平成18年3月31日(2006.3.31)
【国際出願番号】PCT/US2006/012254
【国際公開番号】WO2006/115704
【国際公開日】平成18年11月2日(2006.11.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(508055353)ユニバーシティ オブ フロリダ リサーチ ファンデーション、インク. (10)
【Fターム(参考)】
[ Back to top ]