
中層浮魚礁の回収方法及びこれに使用する回収用金具
【課題】設置場所の水深等の作業条件に左右されにくく、簡単かつ確実に中層浮魚礁のすべての構成部材を引き揚げることのできる回収方法と、この方法で使用する回収用金具を提供する。
【解決手段】海底に設置されたアンカー2に結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁1に対して、作業船10から吊り下げた案内索11の先端部を移動しながら魚礁本体に掛止させて作業船10を固定した後、作業船10から繰り出す回収索15の一端側と結合する回収用金具20が前方に着脱可能に取り付けられた無人潜水機13を、案内索11を利用しながら魚礁本体の近くまで降ろし、無人潜水機13を操作して回収用金具20を係留索に結合させ、無人潜水機13を引き揚げた後に回収索15を巻き上げて中層浮魚礁1をそのままの状態で引き揚げる。
【解決手段】海底に設置されたアンカー2に結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁1に対して、作業船10から吊り下げた案内索11の先端部を移動しながら魚礁本体に掛止させて作業船10を固定した後、作業船10から繰り出す回収索15の一端側と結合する回収用金具20が前方に着脱可能に取り付けられた無人潜水機13を、案内索11を利用しながら魚礁本体の近くまで降ろし、無人潜水機13を操作して回収用金具20を係留索に結合させ、無人潜水機13を引き揚げた後に回収索15を巻き上げて中層浮魚礁1をそのままの状態で引き揚げる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底に沈設したアンカーに対して、係留索を介して海中の中層域に浮遊状態で係留される中層浮魚礁の回収技術に関するものである。
【背景技術】
【0002】
この種の中層浮魚礁としては、広い深度領域に亘って集魚効果が得られるように、魚礁本体を柱状に形成すると共に、この魚礁本体を繊維強化プラスチック管や鋼管による密閉構造として浮体を兼ねた構造のものが知られている。また、複数の環状の枠体を上下に配置し、これら環状枠体の外周に網を張設して魚礁本体を構成すると共に、この魚礁本体の内部にブイ状の浮体を設けた構造のものも知られている。斯かる中層浮魚礁は、魚礁本体が海面下20〜300m程度の領域に定位するように、アンカーと係留索を用いて設置されるが、魚礁本体の耐用年数が経過した場合などには、環境対策等の理由から、海中からの引揚げ、回収が求められている。
【0003】
従来、中層浮魚礁の回収方法は、設置場所の水深がそれほど深くない場合には、ダイバーが潜水して係留索を切断し、海面上に浮き上がった魚礁本体を作業船上に引き揚げている。一方、大水深型の中層浮魚礁では、ダイバーによる潜水作業が困難であることから、作業船からの信号で魚礁本体がアンカーから離脱するようなシステムが提案されている(特許文献1)。すなわち、このシステムでは、魚礁本体と海底に沈設されたアンカーとを連結する係留索のアンカーに近い位置に、超音波信号で作動する切離し装置を介在させることにより、必要時に魚礁本体を海面上に浮き上がらせるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実用新案登録第3101433号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術においては、人と機械の違いはあるものの、いずれの方法も分断した位置よりも下方の係留索とアンカーとが、そのまま海中に残置されることになる。このため、海底近くに放置されたこれら部材が、漁業者の操業の妨げとなることもあり、その改善が強く望まれていた。
【0006】
本発明は、これら従来技術の問題点に鑑みなされたもので、設置場所の水深等の作業条件に左右されにくく、簡単かつ確実に中層浮魚礁の全体を海中から引き揚げることのできる回収方法と、この方法で使用する回収用金具の提供をその目的とするものである。
【課題を解決するための手段】
【0007】
上記従来技術の問題点を解決するため、本願の請求項1に係る中層浮魚礁の回収方法では、海底に沈設されたアンカーに結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁に対して、作業船から吊り下げた案内索の先端側を移動しながら魚礁本体の適宜位置に掛止させて作業船を固定した後、作業船から繰り出す回収索の一端側と結合する回収用金具が着脱可能に取り付けられた無人潜水機を、前記案内索を利用しながら魚礁本体の近くまで吊り降ろし、無人潜水機を操作してその回収用金具を魚礁本体の下方にある前記係留索に結合させた後に回収用金具と無人潜水機とを分離し、無人潜水機を引き揚げた後、作業船上で前記回収索を巻き上げて中層浮魚礁を引き揚げるという技術手段を採用した。
【0008】
さらに、上記請求項1に係る中層浮魚礁の回収方法において、回収用金具を係留索に結合させた後、回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がそのブイを目印として回収索の他端部を船上に引き揚げ、これを巻き上げて中層浮魚礁を引き揚げる構成(請求項2)、さらには回収用金具を係留索に結合させた後、案内索の魚礁本体に対する掛止状態を解除して該案内索を引き揚げる構成(請求項3)とすることも可能である。
【0009】
また、本願の請求項4に係る回収用金具は、上記請求項1ないし3に係る中層浮魚礁の回収方法で使用するものであって、係留索を外周側の開口部から内側の収容部に受入れ可能な金具本体に、浮力を有する棒状部材からなるガイド体を、該開口部から外側に開くように平面視略V字状に配置するという技術手段を採用した。
【発明の効果】
【0010】
本発明に係る中層浮魚礁の回収方法とこれに使用する回収用金具では、上記のような構成を採用したことにより、次の効果を得ることができる。
(1)魚礁本体とアンカーとを繋ぐ係留索に対して回収索の一端側を接続し、この回収索の他端側を作業船上で巻き上げることにより、それらの各構成部材が一体に連結されたままの状態で中層浮魚礁の全体を引き揚げるので、回収後に海中に残置されるものがなくなる。
(2)回収索と係留索との接続作業は、作業船が魚礁本体の上方を周回することにより、作業船から吊り下げた案内索の先端側にあるフック等を魚礁本体に対して掛止させた後、この案内索をガイドとして作業船上から吊り降ろした無人潜水機を魚礁本体の近くまで移動させ、無人潜水機に取り付けた回収用金具を介して係留索に接続するので、ダイバーが潜れないような深い水深に設置された中層浮魚礁に対しても適用が可能である。
(3)無人潜水機による回収索と係留索との接続作業は、海上の作業船と魚礁本体とを連結する案内索に沿わすようにして無人潜水機を吊り降ろすので、長尺の回収索が付加されたことに伴って少なからず操作性が低下した無人潜水機を魚礁本体の近くにほぼ最短距離で移動させることができ、その後の係留索との接続は、無人潜水機に取り付けた回収用金具のガイド体により容易に行うことができる。
(4)回収用金具を係留索に結合させた後、回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がそのブイを目印として回収索の他端部を船上に引き揚げ、これを巻き上げるようにした場合には、例えば回収索を係留索に接続するまでの作業を小回りのきく小型の船舶で行い、重量物であるアンカーを分離することなくそのままの状態で中層浮魚礁全体の引揚げ作業を大型の台船で行う分担作業とすることで、回収作業全体の作業時間短縮が可能になり、天候の急変などに伴う作業中止のリスクを低減する上で有効である。
(5)回収用金具を係留索に結合させた後、案内索の魚礁本体に対する掛止状態を解除して該案内索を回収するようにした場合には、回収索を巻き上げる際に障害となる物が一切無くなるので、その巻上げ作業をより円滑に行うことができる。
(6)回収用金具は、係留索と回収索との結合を担う金具本体の一部に、その質量を相殺するような浮力を有する素材からなるガイド体を設けているので、無人潜水機の前方にこれを取り付けた場合でも、無人潜水機の重心位置の変動を最小限に止め、操作性の低下を阻止することができる。さらに、ガイド体が平面視でV字状に開いているので、アンカーから直立する係留索に対して、そのガイド体が係合しやすく、確実に係留索を金具本体の収容部へと導くことができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る中層浮魚礁の回収方法において、海中に吊り下げた案内索を魚礁本体に掛止させる作業を示す説明図である。
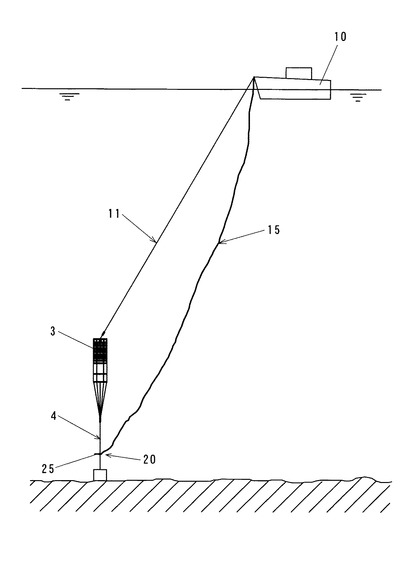
【図2】無人潜水機による回収索の取付作業を示す説明図である。
【図3】本発明に係る回収用金具の平面図である。
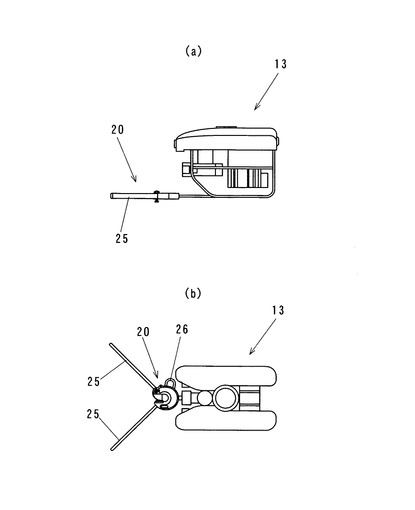
【図4】(a)、(b)はそれぞれ本発明に係る回収用金具を取り付けた状態の無人潜水機の正面図と平面図である。
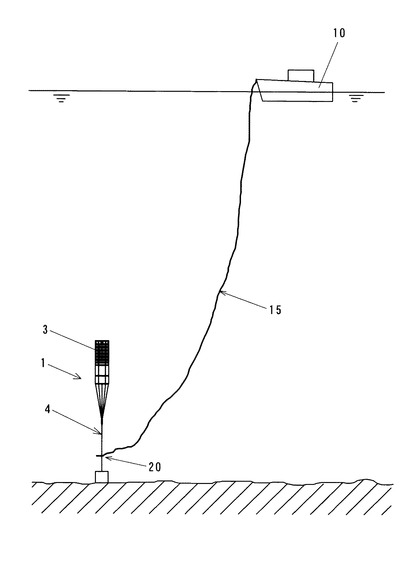
【図5】回収索の一端側を中層浮魚礁の係留索に結合させた後、無人潜水機を回収用金具から切り離して引き揚げた後の状態を示す説明図である。
【図6】案内索を魚礁本体から外して船上に引き揚げた状態を示す説明図である。
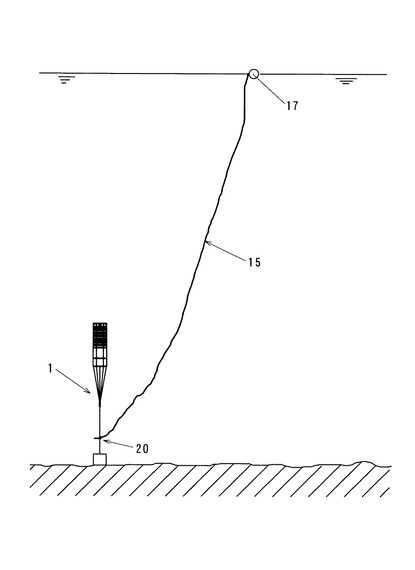
【図7】回収索の他端側にブイを取り付けた状態を示す説明図である。
【図8】台船により中層浮魚礁を船上に引き揚げる作業を示す説明図である。
【発明を実施するための形態】
【0012】
本発明は、海中に設置された中層浮魚礁の回収において、無人潜水機の操作性を向上させるために案内索と専用の回収用金具を利用し、無人潜水機によって回収索を中層浮魚礁の係留索に結合することにより、これまでは困難であったアンカーを含む中層浮魚礁のすべての構成部材を船上に引き揚げることができるという利点がある。以下、図面に基づき本発明の実施例について説明するが、実施例に限定されるものではなく、本発明の技術思想内での種々の変更実施はもちろん可能である。
【実施例】
【0013】
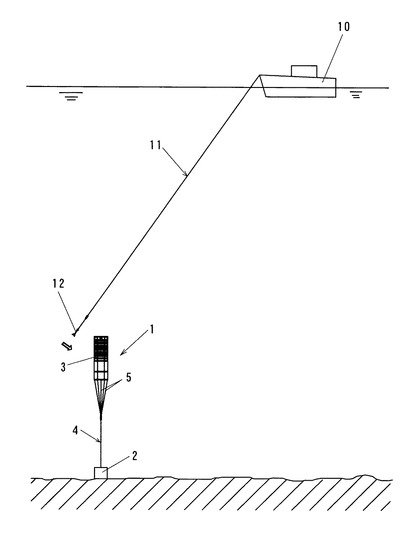
本発明に係る中層浮魚礁の回収方法では、第一段階として、図1に示すように作業船10から案内索11を海中に吊り下げ、この状態で作業船10が中層浮魚礁1の上方を周回し、案内索11の先端側に取り付けたフック12を中層浮魚礁1の魚礁本体3に引っ掛ける作業を行う。なお、回収対象となる図に示した中層浮魚礁1は一例であって、海底に設置されるアンカー2と、浮力を備える中空円柱状の魚礁本体3と、これらを繋ぐ係留索4とから構成され、魚礁本体3が海面下の所定水深に定位するように設置されている。図中に5で示した部材は副係留索であり、太い係留索4(主係留索)に対して、魚礁本体3を安定した状態で接続するためのもので、係留索4に比して細く、かつ係留索4と魚礁本体3との間に複数本設けられている。この魚礁本体3は、繊維強化プラスチックからなる籠状枠体の中空部の上部側に、十分な浮力を生じさせるための中空球体からなる多数の浮体が収納されるとともに、下部側には錘が設けられたもので、両者のバランスにより静止海水に対して直立浮揚するように設計されている。この場合、魚礁本体3が籠状に形成されていることから、海中に吊り下げられた案内索11の先端側のフック12は、設置場所の水深が深い場合であってもさほどの困難を伴うことなく、籠状枠体の外周面に開口する多数の隙間のいずれかに掛止され、魚礁本体3と作業船10とを連結することになる。
【0014】
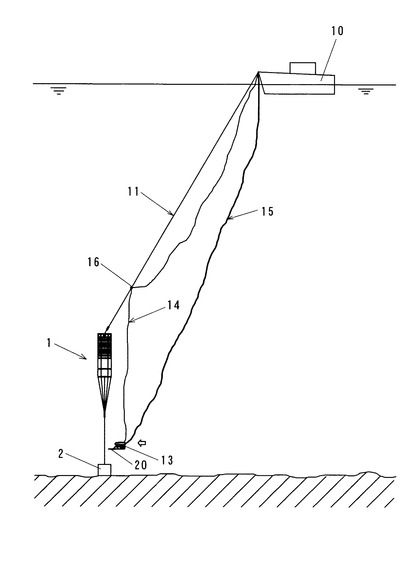
上記作業によって魚礁本体3に案内索11が掛止されると、図2に示すように、中層浮魚礁1のアンカー2が碇となって作業船10が固定され、この状態で作業船10上から無人潜水機13を海中に降ろす。この無人潜水機13には、制御ケーブル14に加え、後述する回収用金具20を介して回収索15の一端側が接続され、その潜航に伴って回収索15等が作業船10から繰り出される。さらに、無人潜水機13を操作するための制御ケーブル14の中間部にはガイドリング16が設けられ、その内側を案内索11が貫通している。したがって、無人潜水機13は、この案内索11に沿うようにして下方に移動し、魚礁本体3に短時間で確実に近づくことができる。
【0015】
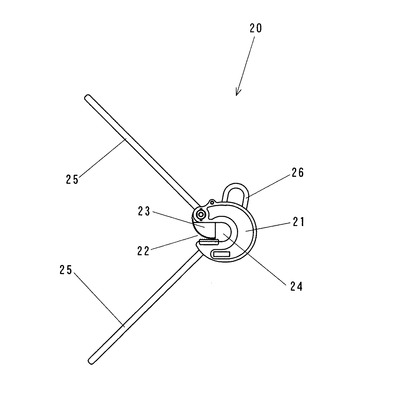
図3は、本発明に係る回収用金具の平面図である。図示の回収用金具20は、平面視略C字状に形成された金具本体21の開口部22の内方に、バネを介して弾発的に開閉自在な歯車状のストッパ部材23が設けられ、このストッパ部材23の奥側が係留索4の収容部24となっている。さらに、開口部22の外側の周面には、2本の棒状のガイド体25が外側に開くように略V状に配置されている。このガイド体25は、金具本体21の質量が無人潜水機13の前方側に付加されたことに伴う極端なバランス変化(傾き)をその浮力によって阻止し、操作性を維持する効果がある。具体的には、両端が封止された中空のプラスチックパイプ、あるいは発泡させたプラスチックロッドなど、海中で十分な浮力を発生させるような素材、寸法のものが使用される。ガイド体25の長さは、無人潜水機13の操作性を損なわない50〜100cm程度が好適である。また、金具本体21の外周面には、回収索15を接続するためのU字状のフック部26が設けられている。
【0016】
図4(a),(b)は、それぞれ図3に示した本発明に係る回収用金具20を取り付けた状態の無人潜水機13の正面図と平面図である。回収用金具20は、無人潜水機13の前方側にガイド体25が水平状態で略V状となるように設置され、無人潜水機13の制御ケーブル14を介して作業船10からの信号で着脱可能に取り付けられる。なお、図示はしてないが、回収用金具20のフック部26には回収索15の一端側が接続される。回収用金具20は、対象となる中層浮魚礁1の質量を考慮して設計され、一般的には10t程度の強度を持つものが必要である。このような金具本体21を無人潜水機13の前方に取り付けると、小型の無人潜水機13では前方に傾きすぎて姿勢の制御が困難となり、操作不能となってしまう。しかしながら、回収用金具20に十分な浮力を有するガイド体25を設けたから、それを効果的に相殺し、小型の無人潜水機13を適用することができる。
【0017】
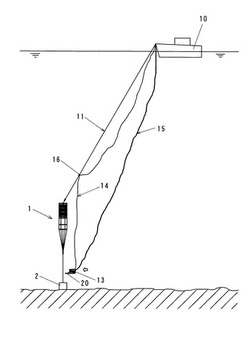
図5は、無人潜水機13によって回収用金具20を係留索4に結合した後、無人潜水機13を作業船10上に引き揚げた状態を示している。係留索4に対する回収用金具20の結合作業は、アンカー3から直立する係留索4に対して、無人潜水機13をその前方に設けられた略V状のガイド体25間に係留索4が入り込むように操作し、この状態でさらに水平方向に移動させ、ストッパ部材23を開きながらその奥の収容部24に収まるようにする。なお、ストッパ部材23の開閉動作をバネに代えて無人潜水機13側の操作で行うようにすれば、より推進力の小さい無人潜水機13を利用することができる。
【0018】
図6は、中層浮魚礁1に対して回収索15の結合が完了した後、案内索11を作業船10上に引き揚げた状態を示している。この場合、魚礁本体3に掛止されていた案内索11を離脱させるには、例えばフック12の基部に切離し装置を介在させ、作業船10上からの超音波信号でそれを作動させるようにしてもよい。なお、案内索11の離脱と引き揚げは、中層浮魚礁1の引き揚げ作業を行う際に、それが巻き上げ作業の妨げとならないようにするためのものであるが、場合によってはそのままの掛止状態で引き揚げ作業を行ってもよい。
【0019】
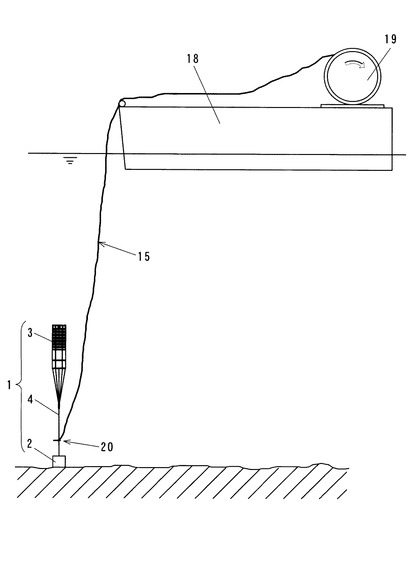
図7は、作業船10から回収索15の他端側を切り離し、端部に目印としてのブイ17を取り付けた状態を示している。この場合には、作業船10による中層浮魚礁1の引き揚げ作業は行わず、図8に示すように、別途用意したウインチ付きの台船18が引き揚げ作業を行う。回収索15をウインチ19で巻き上げるとき、回収索15の一端側にある回収用金具20が係留索4から外れることはないので、係留索4の両端側にあるアンカー2と魚礁本体3が一体となって中層浮魚礁1の全体が海面上に浮上し、台船18上に回収することができる。このように、回収用金具20と係留索4との結合作業を小回りのきく小型の作業船10で行ない、重量物である中層浮魚礁1の引き揚げ作業を大型の台船18で行うようにすれば、作業時間全体の短縮が可能になり、天候が変化しやすい海上作業での効率向上につながる。なお、一連の作業を分担せずに1隻の船舶で対応することはもちろん可能である。
【産業上の利用可能性】
【0020】
本発明は、無人潜水機の効率的な操作により、ダイバーが潜れないような深い水深に設置された各種の中層浮魚礁を、アンカーを含めたすべての部材を簡単かつ確実に引き揚げることができる。
【符号の説明】
【0021】
1…中層浮魚礁、2…アンカー、3…魚礁本体、4…係留索、5…副係留索、10…作業船、11…案内索、12…フック、13…無人潜水機、14…制御ケーブル、15…回収索、16…ガイドリング、17…ブイ、18…台船、19…ウインチ、20…回収用金具、21…金具本体、22…開口部、23…ストッパ部材、24…収容部、25…ガイド体、26…フック部
【技術分野】
【0001】
本発明は、海底に沈設したアンカーに対して、係留索を介して海中の中層域に浮遊状態で係留される中層浮魚礁の回収技術に関するものである。
【背景技術】
【0002】
この種の中層浮魚礁としては、広い深度領域に亘って集魚効果が得られるように、魚礁本体を柱状に形成すると共に、この魚礁本体を繊維強化プラスチック管や鋼管による密閉構造として浮体を兼ねた構造のものが知られている。また、複数の環状の枠体を上下に配置し、これら環状枠体の外周に網を張設して魚礁本体を構成すると共に、この魚礁本体の内部にブイ状の浮体を設けた構造のものも知られている。斯かる中層浮魚礁は、魚礁本体が海面下20〜300m程度の領域に定位するように、アンカーと係留索を用いて設置されるが、魚礁本体の耐用年数が経過した場合などには、環境対策等の理由から、海中からの引揚げ、回収が求められている。
【0003】
従来、中層浮魚礁の回収方法は、設置場所の水深がそれほど深くない場合には、ダイバーが潜水して係留索を切断し、海面上に浮き上がった魚礁本体を作業船上に引き揚げている。一方、大水深型の中層浮魚礁では、ダイバーによる潜水作業が困難であることから、作業船からの信号で魚礁本体がアンカーから離脱するようなシステムが提案されている(特許文献1)。すなわち、このシステムでは、魚礁本体と海底に沈設されたアンカーとを連結する係留索のアンカーに近い位置に、超音波信号で作動する切離し装置を介在させることにより、必要時に魚礁本体を海面上に浮き上がらせるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実用新案登録第3101433号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術においては、人と機械の違いはあるものの、いずれの方法も分断した位置よりも下方の係留索とアンカーとが、そのまま海中に残置されることになる。このため、海底近くに放置されたこれら部材が、漁業者の操業の妨げとなることもあり、その改善が強く望まれていた。
【0006】
本発明は、これら従来技術の問題点に鑑みなされたもので、設置場所の水深等の作業条件に左右されにくく、簡単かつ確実に中層浮魚礁の全体を海中から引き揚げることのできる回収方法と、この方法で使用する回収用金具の提供をその目的とするものである。
【課題を解決するための手段】
【0007】
上記従来技術の問題点を解決するため、本願の請求項1に係る中層浮魚礁の回収方法では、海底に沈設されたアンカーに結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁に対して、作業船から吊り下げた案内索の先端側を移動しながら魚礁本体の適宜位置に掛止させて作業船を固定した後、作業船から繰り出す回収索の一端側と結合する回収用金具が着脱可能に取り付けられた無人潜水機を、前記案内索を利用しながら魚礁本体の近くまで吊り降ろし、無人潜水機を操作してその回収用金具を魚礁本体の下方にある前記係留索に結合させた後に回収用金具と無人潜水機とを分離し、無人潜水機を引き揚げた後、作業船上で前記回収索を巻き上げて中層浮魚礁を引き揚げるという技術手段を採用した。
【0008】
さらに、上記請求項1に係る中層浮魚礁の回収方法において、回収用金具を係留索に結合させた後、回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がそのブイを目印として回収索の他端部を船上に引き揚げ、これを巻き上げて中層浮魚礁を引き揚げる構成(請求項2)、さらには回収用金具を係留索に結合させた後、案内索の魚礁本体に対する掛止状態を解除して該案内索を引き揚げる構成(請求項3)とすることも可能である。
【0009】
また、本願の請求項4に係る回収用金具は、上記請求項1ないし3に係る中層浮魚礁の回収方法で使用するものであって、係留索を外周側の開口部から内側の収容部に受入れ可能な金具本体に、浮力を有する棒状部材からなるガイド体を、該開口部から外側に開くように平面視略V字状に配置するという技術手段を採用した。
【発明の効果】
【0010】
本発明に係る中層浮魚礁の回収方法とこれに使用する回収用金具では、上記のような構成を採用したことにより、次の効果を得ることができる。
(1)魚礁本体とアンカーとを繋ぐ係留索に対して回収索の一端側を接続し、この回収索の他端側を作業船上で巻き上げることにより、それらの各構成部材が一体に連結されたままの状態で中層浮魚礁の全体を引き揚げるので、回収後に海中に残置されるものがなくなる。
(2)回収索と係留索との接続作業は、作業船が魚礁本体の上方を周回することにより、作業船から吊り下げた案内索の先端側にあるフック等を魚礁本体に対して掛止させた後、この案内索をガイドとして作業船上から吊り降ろした無人潜水機を魚礁本体の近くまで移動させ、無人潜水機に取り付けた回収用金具を介して係留索に接続するので、ダイバーが潜れないような深い水深に設置された中層浮魚礁に対しても適用が可能である。
(3)無人潜水機による回収索と係留索との接続作業は、海上の作業船と魚礁本体とを連結する案内索に沿わすようにして無人潜水機を吊り降ろすので、長尺の回収索が付加されたことに伴って少なからず操作性が低下した無人潜水機を魚礁本体の近くにほぼ最短距離で移動させることができ、その後の係留索との接続は、無人潜水機に取り付けた回収用金具のガイド体により容易に行うことができる。
(4)回収用金具を係留索に結合させた後、回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がそのブイを目印として回収索の他端部を船上に引き揚げ、これを巻き上げるようにした場合には、例えば回収索を係留索に接続するまでの作業を小回りのきく小型の船舶で行い、重量物であるアンカーを分離することなくそのままの状態で中層浮魚礁全体の引揚げ作業を大型の台船で行う分担作業とすることで、回収作業全体の作業時間短縮が可能になり、天候の急変などに伴う作業中止のリスクを低減する上で有効である。
(5)回収用金具を係留索に結合させた後、案内索の魚礁本体に対する掛止状態を解除して該案内索を回収するようにした場合には、回収索を巻き上げる際に障害となる物が一切無くなるので、その巻上げ作業をより円滑に行うことができる。
(6)回収用金具は、係留索と回収索との結合を担う金具本体の一部に、その質量を相殺するような浮力を有する素材からなるガイド体を設けているので、無人潜水機の前方にこれを取り付けた場合でも、無人潜水機の重心位置の変動を最小限に止め、操作性の低下を阻止することができる。さらに、ガイド体が平面視でV字状に開いているので、アンカーから直立する係留索に対して、そのガイド体が係合しやすく、確実に係留索を金具本体の収容部へと導くことができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る中層浮魚礁の回収方法において、海中に吊り下げた案内索を魚礁本体に掛止させる作業を示す説明図である。
【図2】無人潜水機による回収索の取付作業を示す説明図である。
【図3】本発明に係る回収用金具の平面図である。
【図4】(a)、(b)はそれぞれ本発明に係る回収用金具を取り付けた状態の無人潜水機の正面図と平面図である。
【図5】回収索の一端側を中層浮魚礁の係留索に結合させた後、無人潜水機を回収用金具から切り離して引き揚げた後の状態を示す説明図である。
【図6】案内索を魚礁本体から外して船上に引き揚げた状態を示す説明図である。
【図7】回収索の他端側にブイを取り付けた状態を示す説明図である。
【図8】台船により中層浮魚礁を船上に引き揚げる作業を示す説明図である。
【発明を実施するための形態】
【0012】
本発明は、海中に設置された中層浮魚礁の回収において、無人潜水機の操作性を向上させるために案内索と専用の回収用金具を利用し、無人潜水機によって回収索を中層浮魚礁の係留索に結合することにより、これまでは困難であったアンカーを含む中層浮魚礁のすべての構成部材を船上に引き揚げることができるという利点がある。以下、図面に基づき本発明の実施例について説明するが、実施例に限定されるものではなく、本発明の技術思想内での種々の変更実施はもちろん可能である。
【実施例】
【0013】
本発明に係る中層浮魚礁の回収方法では、第一段階として、図1に示すように作業船10から案内索11を海中に吊り下げ、この状態で作業船10が中層浮魚礁1の上方を周回し、案内索11の先端側に取り付けたフック12を中層浮魚礁1の魚礁本体3に引っ掛ける作業を行う。なお、回収対象となる図に示した中層浮魚礁1は一例であって、海底に設置されるアンカー2と、浮力を備える中空円柱状の魚礁本体3と、これらを繋ぐ係留索4とから構成され、魚礁本体3が海面下の所定水深に定位するように設置されている。図中に5で示した部材は副係留索であり、太い係留索4(主係留索)に対して、魚礁本体3を安定した状態で接続するためのもので、係留索4に比して細く、かつ係留索4と魚礁本体3との間に複数本設けられている。この魚礁本体3は、繊維強化プラスチックからなる籠状枠体の中空部の上部側に、十分な浮力を生じさせるための中空球体からなる多数の浮体が収納されるとともに、下部側には錘が設けられたもので、両者のバランスにより静止海水に対して直立浮揚するように設計されている。この場合、魚礁本体3が籠状に形成されていることから、海中に吊り下げられた案内索11の先端側のフック12は、設置場所の水深が深い場合であってもさほどの困難を伴うことなく、籠状枠体の外周面に開口する多数の隙間のいずれかに掛止され、魚礁本体3と作業船10とを連結することになる。
【0014】
上記作業によって魚礁本体3に案内索11が掛止されると、図2に示すように、中層浮魚礁1のアンカー2が碇となって作業船10が固定され、この状態で作業船10上から無人潜水機13を海中に降ろす。この無人潜水機13には、制御ケーブル14に加え、後述する回収用金具20を介して回収索15の一端側が接続され、その潜航に伴って回収索15等が作業船10から繰り出される。さらに、無人潜水機13を操作するための制御ケーブル14の中間部にはガイドリング16が設けられ、その内側を案内索11が貫通している。したがって、無人潜水機13は、この案内索11に沿うようにして下方に移動し、魚礁本体3に短時間で確実に近づくことができる。
【0015】
図3は、本発明に係る回収用金具の平面図である。図示の回収用金具20は、平面視略C字状に形成された金具本体21の開口部22の内方に、バネを介して弾発的に開閉自在な歯車状のストッパ部材23が設けられ、このストッパ部材23の奥側が係留索4の収容部24となっている。さらに、開口部22の外側の周面には、2本の棒状のガイド体25が外側に開くように略V状に配置されている。このガイド体25は、金具本体21の質量が無人潜水機13の前方側に付加されたことに伴う極端なバランス変化(傾き)をその浮力によって阻止し、操作性を維持する効果がある。具体的には、両端が封止された中空のプラスチックパイプ、あるいは発泡させたプラスチックロッドなど、海中で十分な浮力を発生させるような素材、寸法のものが使用される。ガイド体25の長さは、無人潜水機13の操作性を損なわない50〜100cm程度が好適である。また、金具本体21の外周面には、回収索15を接続するためのU字状のフック部26が設けられている。
【0016】
図4(a),(b)は、それぞれ図3に示した本発明に係る回収用金具20を取り付けた状態の無人潜水機13の正面図と平面図である。回収用金具20は、無人潜水機13の前方側にガイド体25が水平状態で略V状となるように設置され、無人潜水機13の制御ケーブル14を介して作業船10からの信号で着脱可能に取り付けられる。なお、図示はしてないが、回収用金具20のフック部26には回収索15の一端側が接続される。回収用金具20は、対象となる中層浮魚礁1の質量を考慮して設計され、一般的には10t程度の強度を持つものが必要である。このような金具本体21を無人潜水機13の前方に取り付けると、小型の無人潜水機13では前方に傾きすぎて姿勢の制御が困難となり、操作不能となってしまう。しかしながら、回収用金具20に十分な浮力を有するガイド体25を設けたから、それを効果的に相殺し、小型の無人潜水機13を適用することができる。
【0017】
図5は、無人潜水機13によって回収用金具20を係留索4に結合した後、無人潜水機13を作業船10上に引き揚げた状態を示している。係留索4に対する回収用金具20の結合作業は、アンカー3から直立する係留索4に対して、無人潜水機13をその前方に設けられた略V状のガイド体25間に係留索4が入り込むように操作し、この状態でさらに水平方向に移動させ、ストッパ部材23を開きながらその奥の収容部24に収まるようにする。なお、ストッパ部材23の開閉動作をバネに代えて無人潜水機13側の操作で行うようにすれば、より推進力の小さい無人潜水機13を利用することができる。
【0018】
図6は、中層浮魚礁1に対して回収索15の結合が完了した後、案内索11を作業船10上に引き揚げた状態を示している。この場合、魚礁本体3に掛止されていた案内索11を離脱させるには、例えばフック12の基部に切離し装置を介在させ、作業船10上からの超音波信号でそれを作動させるようにしてもよい。なお、案内索11の離脱と引き揚げは、中層浮魚礁1の引き揚げ作業を行う際に、それが巻き上げ作業の妨げとならないようにするためのものであるが、場合によってはそのままの掛止状態で引き揚げ作業を行ってもよい。
【0019】
図7は、作業船10から回収索15の他端側を切り離し、端部に目印としてのブイ17を取り付けた状態を示している。この場合には、作業船10による中層浮魚礁1の引き揚げ作業は行わず、図8に示すように、別途用意したウインチ付きの台船18が引き揚げ作業を行う。回収索15をウインチ19で巻き上げるとき、回収索15の一端側にある回収用金具20が係留索4から外れることはないので、係留索4の両端側にあるアンカー2と魚礁本体3が一体となって中層浮魚礁1の全体が海面上に浮上し、台船18上に回収することができる。このように、回収用金具20と係留索4との結合作業を小回りのきく小型の作業船10で行ない、重量物である中層浮魚礁1の引き揚げ作業を大型の台船18で行うようにすれば、作業時間全体の短縮が可能になり、天候が変化しやすい海上作業での効率向上につながる。なお、一連の作業を分担せずに1隻の船舶で対応することはもちろん可能である。
【産業上の利用可能性】
【0020】
本発明は、無人潜水機の効率的な操作により、ダイバーが潜れないような深い水深に設置された各種の中層浮魚礁を、アンカーを含めたすべての部材を簡単かつ確実に引き揚げることができる。
【符号の説明】
【0021】
1…中層浮魚礁、2…アンカー、3…魚礁本体、4…係留索、5…副係留索、10…作業船、11…案内索、12…フック、13…無人潜水機、14…制御ケーブル、15…回収索、16…ガイドリング、17…ブイ、18…台船、19…ウインチ、20…回収用金具、21…金具本体、22…開口部、23…ストッパ部材、24…収容部、25…ガイド体、26…フック部
【特許請求の範囲】
【請求項1】
海底に沈設されたアンカーに結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁に対して、作業船から吊り下げた案内索の先端側を移動しながら魚礁本体の適宜位置に掛止させて作業船を固定した後、作業船から繰り出す回収索の一端側と結合する回収用金具が着脱可能に取り付けられた無人潜水機を、前記案内索を利用しながら魚礁本体の近くまで吊り降ろし、無人潜水機を操作してその回収用金具を魚礁本体の下方にある前記係留索に結合させた後に回収用金具と無人潜水機とを分離し、無人潜水機を引き揚げた後、作業船上で前記回収索を巻き上げて中層浮魚礁を引き揚げることを特徴とする中層浮魚礁の回収方法。
【請求項2】
前記回収用金具を前記係留索に結合させた後、前記回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がブイを目印として該回収索の他端部を船上に引き揚げ、これを巻き上げて中層浮魚礁を引き揚げることを特徴とする請求項1に記載の中層浮魚礁の回収方法。
【請求項3】
前記回収用金具を前記係留索に結合させた後、前記案内索の前記魚礁本体に対する掛止状態を解除し、該案内索を引き揚げることを特徴とする請求項1または2に記載の中層浮魚礁の回収方法。
【請求項4】
前記係留索を外周側の開口部から内側の収容部に受入れ可能な金具本体に、浮力を有する棒状部材からなるガイド体を、該開口部から外側に開くように平面視略V字状に配置したことを特徴とする請求項1ないし3のいずれか一項に記載の中層浮魚礁の回収方法で使用する回収用金具。
【請求項1】
海底に沈設されたアンカーに結合する係留索を介して魚礁本体が海面下の所定域に浮遊状態で係留される中層浮魚礁に対して、作業船から吊り下げた案内索の先端側を移動しながら魚礁本体の適宜位置に掛止させて作業船を固定した後、作業船から繰り出す回収索の一端側と結合する回収用金具が着脱可能に取り付けられた無人潜水機を、前記案内索を利用しながら魚礁本体の近くまで吊り降ろし、無人潜水機を操作してその回収用金具を魚礁本体の下方にある前記係留索に結合させた後に回収用金具と無人潜水機とを分離し、無人潜水機を引き揚げた後、作業船上で前記回収索を巻き上げて中層浮魚礁を引き揚げることを特徴とする中層浮魚礁の回収方法。
【請求項2】
前記回収用金具を前記係留索に結合させた後、前記回収索の他端側にブイを取り付けて海面上に放置し、別の作業船がブイを目印として該回収索の他端部を船上に引き揚げ、これを巻き上げて中層浮魚礁を引き揚げることを特徴とする請求項1に記載の中層浮魚礁の回収方法。
【請求項3】
前記回収用金具を前記係留索に結合させた後、前記案内索の前記魚礁本体に対する掛止状態を解除し、該案内索を引き揚げることを特徴とする請求項1または2に記載の中層浮魚礁の回収方法。
【請求項4】
前記係留索を外周側の開口部から内側の収容部に受入れ可能な金具本体に、浮力を有する棒状部材からなるガイド体を、該開口部から外側に開くように平面視略V字状に配置したことを特徴とする請求項1ないし3のいずれか一項に記載の中層浮魚礁の回収方法で使用する回収用金具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−207106(P2010−207106A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−53922(P2009−53922)
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000000446)岡部株式会社 (277)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000000446)岡部株式会社 (277)
【Fターム(参考)】
[ Back to top ]