
中継装置及び通信制御方法
【課題】ハンドオーバによる基地局の切り替え後も移動局と基地局との間の通信を継続できる中継装置及び通信制御方法を提供する。
【解決手段】本発明に係る中継装置101は、移動局における無線信号の受信タイミングと当該移動局の受信フレームの開始タイミングとの間の受信許容範囲を取得し、ハンドオーバにより通信先の基地局が切り替わると、中継装置101におけるハンドオーバ前の基地局及びハンドオーバ後の基地局からの無線信号の受信タイミングの差分を算出し、当該差分が受信許容範囲を超えると、移動局の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する。
【解決手段】本発明に係る中継装置101は、移動局における無線信号の受信タイミングと当該移動局の受信フレームの開始タイミングとの間の受信許容範囲を取得し、ハンドオーバにより通信先の基地局が切り替わると、中継装置101におけるハンドオーバ前の基地局及びハンドオーバ後の基地局からの無線信号の受信タイミングの差分を算出し、当該差分が受信許容範囲を超えると、移動局の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、中継装置及び通信制御方法に関するものである。
【背景技術】
【0002】
移動局が基地局と通信するためには、移動局は基地局からの無線電波が届く範囲に位置する必要がある。しかし、山岳地帯や高層ビル等が建ち並ぶ市街地では、障害物が多いため無線電波が届きにくい領域が存在する。また、屋外に設置された基地局からは、建物の内部や地下には、電波が届かない領域が多く存在する。特に、IEEE標準規格802.16eを基に規格化されたWiMAX(Worldwide Interoperability for Microwave Access)(登録商標)等の高速無線通信方式では、2.5GHz以上の高周波数帯の電波が使用されるが、このような電波は直進性が強く、障害物を回りこむ性質が弱い。そのため、WiMAX等は障害物の影響を強く受ける。このような電波が届かない領域をカバーするため、基地局と移動局との間の無線電波を中継する中継装置(レピータ)が必要となる。中継装置は、基地局と通信を行う基地局側ユニット(ドナー部又はMS(Mobile Station)部)と、移動局と通信を行う移動局側ユニット(サービス部又はBS(Base Station)部)とを有している。
【0003】
基地局と移動局とが中継装置を介して通信を行うためには、基地局−基地局側ユニット間と移動局側ユニット−移動局間とで同期を確立する必要がある。ここで、従来の同期確立方法について説明する(例えば、特許文献1参照)。まず、基地局側ユニットが、同期信号(プリアンブル)を含む無線信号を周期的に基地局から受信する。そして、基地局側ユニットは、周期的な同期信号を検出することにより、同期信号の受信タイミングと周期を取得し、基地局と同期を確立する。
【0004】
続いて、基地局側ユニットは、受信タイミングを移動局側ユニットに送る。移動局側ユニットは、受信タイミングに基づいて移動局に送信される同期信号を生成する。そして、移動局側ユニットは、同期信号を含む無線信号を周期的に移動局に送信する。移動局が、同期信号を検出して、自局の受信タイミングを移動局側ユニットの送信タイミングに合わせることにより、移動局側ユニット−移動局間とで同期が確立される。よって、基地局−基地局側ユニット間と移動局側ユニット−移動局間とで同期が確立されることになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−80991号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の中継装置では、基地局側ユニットの通信先である基地局がハンドオーバにより変更された場合の同期確立については想定されていない。例えば、中継装置が電車等の車両に搭載される場合、中継装置は車両と共に移動するため、ハンドオーバにより通信先の基地局が切り替わることがある。
【0007】
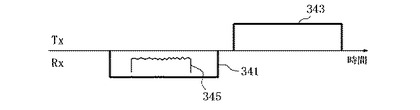
ハンドオーバが行われる前に、移動局は、中継装置(移動局側ユニット)と通信を行うために、図9に示される受信フレーム341及び送信フレーム343を有しているとする。受信フレームとは、移動局が中継装置からの信号を受信できる時間的範囲を示すものである。また送信フレームとは、移動局が中継装置へ信号を送信できる時間的範囲を示すものである。図9のTxは移動局による送信を、Rxは移動局による受信をそれぞれ表している。中継装置からの無線信号345が図9のタイミングで送信されると、無線信号345は受信フレーム341内に収まる。よって、移動局は、無線信号345を受信することができる。
【0008】
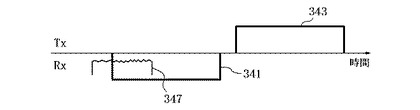
中継装置のハンドオーバにより基地局側ユニットの通信先である基地局が切り替わると、移動局には、ハンドオーバ後の基地局から中継装置を介して新たなタイミングで同期信号を含む無線信号が送られてくる。しかし、移動局は、中継装置のハンドオーバにより当該中継装置における基地局側ユニットの通信先である基地局が切り替わったことを予め認識することはできない。そのため、移動局は、図10のようにハンドオーバ前と同じタイミングの受信フレーム341でハンドオーバ後の基地局からの無線信号を受信しようとする。
【0009】
このとき、中継装置からの無線信号347が受信フレーム341内に収まらないことがある。この場合、移動局は、無線信号347を受信することができないので、無線信号347を一過性のエラー信号と判断し、基地局に再送要求を行う。しかし、移動局は、エラー信号に合わせて受信フレーム341のタイミングを変更することはないので、再送されてきた無線信号も受信できない可能性が高い。よって、ハンドオーバ後の中継装置と移動局との間の同期確立が困難となり、通信が途切れてしまうおそれがある。
【0010】
従って、上記のような問題点に鑑みてなされた本発明の目的は、中継装置における、ハンドオーバによる基地局の切り替え後も移動局と基地局との間の通信を継続できる中継装置及び通信制御方法を提供することにある。
【課題を解決するための手段】
【0011】
上述した諸課題を解決すべく、第1の観点に係る発明は、
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置であって、
前記第1の通信装置と無線通信する第1の通信部と、
前記第2の通信装置と無線通信する第2の通信部と、
前記第1の通信部により受信された無線信号に基づくタイミングで、同期信号を含む無線信号を送信するように第2の通信部を制御する制御部と
を備え、前記制御部は、
前記第2の通信部を介して、前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲を取得し、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出し、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する
ものである。
【0012】
また、第2の観点に係る発明は、第1の観点に係る中継装置において、前記制御部は、前記無線信号の前記送信タイミングの補正量を段階的に小さくすることを特徴とするものである。
【0013】
上述したように本発明の解決手段を装置として説明してきたが、本発明はこれらに実質的に相当する方法、プログラム、プログラムを記録した記憶媒体としても実現し得るものであり、本発明の範囲にはこれらも包含されるものと理解されたい。
【0014】
例えば、本発明の第1の観点を方法として実現させた通信制御方法は、
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置における通信制御方法において、当該中継装置が、
前記第1の通信装置から無線信号を受信して、当該信号に基づくタイミングで、同期信号を含む無線信号を送信するステップと、
前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲の情報を前記第2の通信装置から受信するステップと、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出するステップと、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、前記同期信号を含む無線信号の送信タイミングを補正するステップと、
送信タイミングが補正された前記無線信号を前記第2の通信装置に送信するステップと
を含むものである。
【発明の効果】
【0015】
上記のように構成された本発明に係る中継装置及び通信制御方法によれば、中継装置が、移動局が受信できないタイミングで、無線信号を送信することはないため、移動局は、ハンドオーバ後の基地局と通信を継続できる。
【図面の簡単な説明】
【0016】
【図1】図1は、本発明の一実施形態に係る概略的な無線通信システム構成図である。
【図2】図2は、本発明の一実施形態に係る中継装置の概略構成を示す機能ブロック図である。
【図3】図3は、本発明の一実施形態に係る移動局の受信許容範囲を示す説明図である。
【図4】図4は、本発明の一実施形態に係る移動局の受信フレームの変更を示す説明図である。
【図5】図5は、本発明の一実施形態に係る中継装置の処理を示すフローチャートである。
【図6】図6は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。
【図7】図7は、本発明の一実施形態に係る中継装置の受信タイミングを示す説明図である。
【図8】図8は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。
【図9】図9は、従来の中継装置からの無線信号と移動局の受信フレームとの関係図である。
【図10】図10は、従来の中継装置からの無線信号と移動局の受信フレームとの関係図である。
【発明を実施するための形態】
【0017】
以下、本発明に係る一実施形態について、図面を参照して説明する。
【0018】
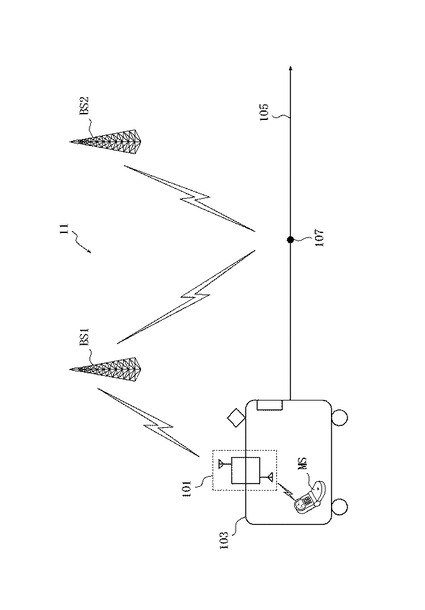
図1は、本発明の一実施形態に係る概略的な無線通信システム構成図である。無線通信システム11は、基地局BS(Base Station)(BS1及びBS2)(請求項における上位局である第1及び第3の通信装置)と、移動局MS(Mobile Station)(請求項における下位局である第2の通信装置)と、中継装置101とから構成されている。無線通信システム11の通信方式がWiMAXである場合、無線通信システム11には、直交周波数分割多重アクセス(OFDMA:Orthogonal Frequency Division Multiple Access)方式及び時分割複信(TDD:Time Division Duplex)方式が採用される。中継装置101は、WiMAX等の無線通信方式において、基地局BSと移動局MSとの間で送受信されるデータを中継する。当該中継装置101により、移動局MSは、基地局BSのセル(通信可能エリア)の範囲外に位置していても、基地局BSとデータを送受信できる。
【0019】
図1において、中継装置101は、車両103に搭載され、車両103と共に方向105に移動するものとする。車両103が位置107に移動したときにハンドオーバが実行され、中継装置101の通信先が基地局BS1(ハンドオーバ前の基地局)(第1の通信装置)から基地局BS2(ハンドオーバ後の基地局)(第3の通信装置)に切り替わるものとする。なお、本発明は、中継装置101が移動車両用であることに限定されるものではなく、基地局がハンドオーバにより切り替わる状況であれば、中継装置101を一体型又は分離型とすることができる。
【0020】
図2は、本発明の一実施形態に係る中継装置の概略構成を示す機能ブロック図である。
【0021】
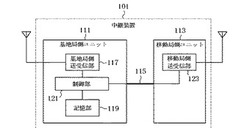
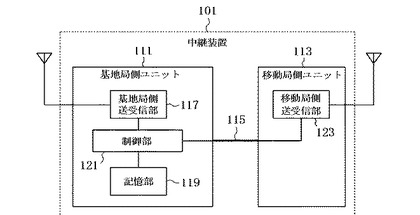
中継装置101は、基地局BSと通信を行う基地局側ユニット111と、移動局MSと通信を行う移動局側ユニット113とを備えている。基地局側ユニット111は、車両103の外部に配置され、移動局側ユニット113は、車両103の内部に配置され、基地局側ユニット111と移動局側ユニット113とは、LANケーブル等の信号ケーブル115によって接続されている。
【0022】
まず、基地局側ユニット111の機能ブロックについて説明する。基地局側ユニット111は、基地局側送受信部117(請求項における第1の通信部)と、記憶部119と、制御部121とを備えている。
【0023】
基地局側送受信部117は、アンテナを介して基地局BSと無線通信する。基地局側送受信部117は、受信した無線信号に対して低雑音での増幅及びダウンコンバート等を行うことによりベースバンド信号を生成し、制御部121に送る。また、基地局側送受信部117は、ベースバンド信号に対してアップコンバート及び増幅等を行うことにより無線信号を生成し、アンテナを介して当該無線信号を基地局BSに送信する。
【0024】
記憶部119は、各種情報を記憶するものであり、ワークメモリなどとしても機能する。なお、本実施形態では、基地局側ユニット111のみが、記憶部を有するが、本発明は、この構成に限定されるわけではない。例えば、移動局側ユニット113のみが記憶部を有し、当該記憶部が、基地局側ユニット111の各種情報を、信号ケーブル115を介して受け取り、記憶することができる。また、基地局側ユニット111及び移動局側ユニット113の双方が記憶部を有し、各々の記憶部が各々のユニットの情報を記憶することもできる。
【0025】
制御部121は、基地局側ユニット111及び移動局側ユニット113の各機能ブロックをはじめとして基地局側ユニット111及び移動局側ユニット113の全体を制御及び管理する。ここで、制御部121は、CPU(中央処理装置)等の任意の好適なプロセッサ上で実行されるソフトウェアとして構成したり、処理ごとに特化した専用のプロセッサ(例えばDSP(デジタルシグナルプロセッサ))によって構成したりすることもできる。なお、本実施形態では、基地局側ユニット111のみが、制御部を有するが、本発明は、この構成に限定されるわけではない。例えば、移動局側ユニット113のみが制御部を有し、当該制御部が、基地局側ユニット111の全体を、信号ケーブル115を介して制御及び管理することができる。また、基地局側ユニット111及び移動局側ユニット113の双方が制御部を有し、各々の制御部が各々のユニットを制御及び管理することもできる。
【0026】
制御部121についてより詳細に説明する。制御部121は、基地局側送受信部117により受信された基地局BSからの無線信号に含まれる同期信号(プリアンブル)を検出する。同期信号の検出は、基地局側送受信部117から送られてくるベースバンド信号をAD変換及び高速フーリエ変換(FFT)を行うことにより実現される。同期信号は基地局BSから周期的に送られてくるため、制御部121は、中継装置101が同期信号を受信する受信タイミングとその周期を、制御部121のカウンタにおけるクロックパルス数の換算により取得する。
【0027】
そして、制御部121は、基地局側送受信部117により受信された無線信号に基づいて、移動局MSに送信するための同期信号を生成する。つまり、制御部121は、取得した受信タイミングと周期から、中継装置101の受信タイミングと同じタイミングで移動局MSに送信される同期信号を生成する。制御部121は、同期信号をデータの先頭に付して無線信号を生成し、当該無線信号を送信するように後述する移動局側送受信部123を制御する。
【0028】
また、制御部121は、基地局側送受信部117により受信された無線信号の通信品質値を求める。通信品質値とは、例えば、SNR(Signal to Noise Ratio:信号対雑音比)、CNR(Carrier to Noise Ratio:搬送波対雑音比)、SINR(Signal to Interference and Noise Ratio:信号対干渉雑音比)、CINR(Carrier to Interference and Noise Ratio:搬送波対干渉雑音比)などであり、通信品質値が大きいほど中継装置101の通信先である基地局BSの通信状態の良さを表す。そして、制御部121は、求めた通信品質値が記憶部119に予め記憶されている閾値未満になると、ハンドオーバを行い、通信先の基地局を切り替える。なお、本発明は、ハンドオーバを行う基準が、通信品質値が閾値未満であることに限定されるものではなく、制御部121は、通信品質値が閾値以下になる場合に、ハンドオーバを行うこともできる。制御部121が行うその他の処理については、後述の図5の説明にて詳述する。
【0029】
次に、移動局側ユニット113の機能ブロックについて説明する。移動局側ユニット113は、移動局側送受信部123(請求項における第2の通信部)を備えている。
【0030】
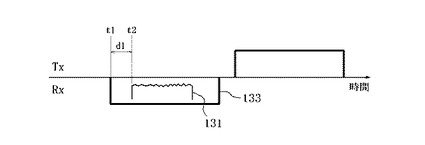
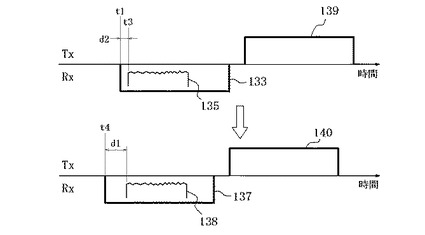
移動局側送受信部123は、アンテナを介して移動局MSと無線通信するものであり、基地局側送受信部117と同様、無線信号からベースバンド信号の生成及びベースバンド信号から無線信号の生成を行う。移動局側送受信部123は、例えば、同期信号を含む無線信号を移動局MSに送信したり、移動局MSから受信許容範囲の情報を含む無線信号を受信したりする。ここで、移動局MSの受信許容範囲について図3を用いて説明する。移動局MSは、受信した無線信号131に含まれる同期信号から受信フレーム133を設定する。受信フレーム133とは、移動局MSが中継装置101(移動局側ユニット113)からの信号を受信できる時間的範囲を示すものである。移動局MSは、無線信号が受信フレーム133内に届くと、当該無線信号を受信することができる。受信許容範囲とは、受信フレーム133の開始タイミングt1と無線信号131の受信タイミングt2との間の時間的間隔d1である。通信環境の変化等によって無線信号が受信タイミングt2よりも早く届いたとしても、届くタイミングが受信許容範囲内であれば、移動局MSは、無線信号を受信できる。
【0031】
また、移動局MSは、受信フレームの受信許容範囲が所定の値αになるように、無線信号を受信する毎に受信フレームをずらすことができる。所定の値αは、移動局MSが基地局BSと同期を確立できた場合に、中継装置101を介した基地局BSからの無線信号を受信するタイミングを示すものである。以下、本実施形態では、所定の値αはd1であるとする。図4のように、移動局MSが、図3と同じ受信フレーム133において、無線信号135を受信タイミングt3で受信したとする。このとき受信許容範囲はd2(d2<d1)であるとする。移動局MSは、受信許容範囲をd1にするために、受信フレーム133の開始タイミングt1を(d1−d2)早め、開始タイミングt4の新たな受信フレーム137を設定することができる。これにより、移動局MSが受信フレーム133をずらした後に、無線信号138が無線信号135と同様のタイミングで移動局MSに届くと、受信許容範囲はd1となる。なお、受信フレームの移動に併せて、移動局MSが中継装置101へ信号を送信できる時間的範囲を示す送信フレーム139を送信フレーム140に変更することができる。
【0032】
続いて、中継装置101の同期信号の送信方法について、図5、図6、図7及び図8を参照して説明する。図5は、本発明の一実施形態に係る中継装置の処理を示すフローチャートである。図6及び図8は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。図7は、本発明の一実施形態に係る中継装置の受信タイミングを示す説明図である。
【0033】
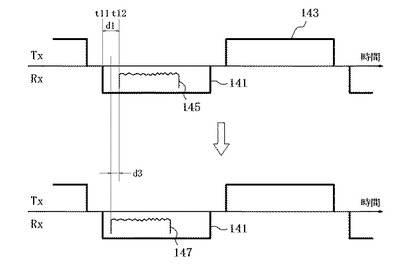
まず、移動局MSは、中継装置101を介して基地局BS1と同期を確立し、図6に示される受信フレーム141及び送信フレーム143を周期的に設定している。そして、移動局MSは、中継装置101を介して基地局BS1と通信を行っている。受信フレーム141の開始タイミングはt11であり、移動局MSは、受信許容範囲がd1となる受信タイミングt12で無線信号145を受信しているとする。
【0034】
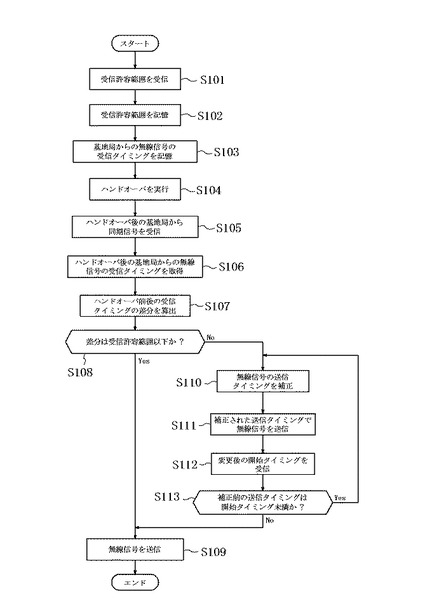
移動局側送受信部123は、受信許容範囲の情報(d1)を含む無線信号を移動局MSから受信し(ステップS101)、制御部121に送る。
【0035】
制御部121は、無線信号から受信許容範囲の情報を取得する。そして、当該受信許容範囲の情報を記憶部119に記憶させる(ステップS102)。
【0036】
また、制御部121は、基地局BS1からの無線信号に含まれる同期信号から、当該無線信号の受信タイミングを取得し、記憶部119に記憶させる(ステップS103)。
【0037】
更に、制御部121は、基地局BS1からの無線信号の通信品質値を求め、記憶部119に記憶されている閾値と比較する。中継装置101を搭載する車両103が位置107まで移動すると、通信品質値が閾値未満となり、制御部121は、ハンドオーバを実行する(ステップS104)。ハンドオーバにより、中継装置101の通信先が基地局BS1(ハンドオーバ前の基地局)から基地局BS2(ハンドオーバ後の基地局)に切り替わる。
【0038】
中継装置101の基地局側送受信部117は、基地局BS2から同期信号を含む無線信号を受信する(ステップS105)。制御部121は、基地局側送受信部117により受信された無線信号から同期信号の受信タイミングとその周期を取得する(ステップS106)。そして、制御部121は、受信した無線信号に基づいて移動局MSに送信するための同期信号を生成する。
【0039】
次に、制御部121は、ハンドオーバ前の基地局BS1からの無線信号の受信タイミングと、ハンドオーバ後の基地局BS2からの無線信号の受信タイミングとの差分を算出する(ステップS107)。つまり、図7に示されるように、中継装置101が、ハンドオーバ前には基地局BS1から無線信号145を受信し、ハンドオーバ後には基地局BS2から無線信号147を受信している場合、制御部121は、受信タイミングの差分d3を算出する。
【0040】
制御部121は、算出した受信タイミングの差分d3と記憶部119に記憶されている移動局MSの受信許容範囲とを比較する(ステップS108)。差分d3が受信許容範囲d1以下である場合(d3≦d1)(ステップS108のYes)、制御部121は、生成された同期信号を先頭に有する無線信号147を移動局側送受信部123に送信させる(ステップS109)。差分d3が受信許容範囲d1以下であるため、図6のように無線信号147は、移動局MSの受信フレーム141内に届く。よって、移動局MSは、無線信号147を受信できる。
【0041】
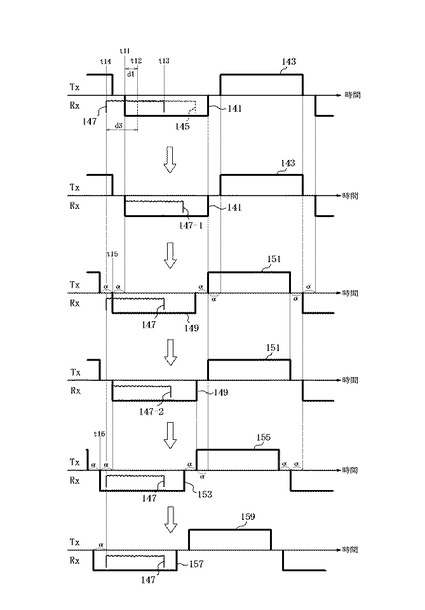
続いて、差分d3が受信許容範囲d1を超えている場合(d3>d1)(ステップS108のNo)について説明する。中継装置101が、生成した同期信号に基づいて無線信号147を移動局MSに送信すると、無線信号147は、図8に示されように移動局MSの受信フレーム141の開始タイミングt11よりも早く届いてしまう。つまり、移動局MSは、無線信号147を受信できない。そこで、制御部121は、無線信号147の送信タイミングt14を補正する(ステップS110)。
【0042】
具体的には、制御部121は、無線信号147の送信タイミングt14を(d3−d1)以上遅らせる。そうすることにより、移動局MSにおける無線信号147の受信タイミングが受信フレーム141内に収まることになる。なお、制御部121は、無線信号147の送信タイミングt14をd3よりも大きく遅らせる場合には、無線信号147の終了タイミングt13が受信フレーム141外にならないように無線信号147の送信タイミングt14をずらす必要がある。以下、本実施形態では、制御部121は、無線信号147の送信タイミングが移動局MSの受信フレームの開始タイミングに重なるように送信タイミングをずらすとする。
【0043】
よって、制御部121は、無線信号147の送信タイミングt14を(d3−d1)遅らせる。そして、制御部121は、補正された送信タイミングで、無線信号147を移動局側送受信部123に送信させる(ステップS111)。以下、1回目の送信タイミング補正により送信された無線信号147を無線信号147−1とする。
【0044】
すると、無線信号147−1は、移動局MSの受信フレーム141の開始タイミングt11に届く。よって、移動局MSは、無線信号147−1を受信できる。移動局MSは、受信許容範囲を所定の値α(=d1)に維持しようとするため、無線信号147−1を受け、受信フレーム141(及び送信フレーム143)をα早める。つまり、移動局MSは、新たな受信フレーム149(及び送信フレーム151)を設定する。そして、移動局MSは、変更後の受信フレーム149の開始タイミングt15の情報を無線信号に含めて、中継装置101に送信することができる。
【0045】
移動局側送受信部123は、変更後の開始タイミングt15の情報を受信し(ステップS112)、制御部121は、開始タイミングt15と無線信号147の補正前の送信タイミングt14とを比較する(ステップS113)。補正前の送信タイミングt14が開始タイミングt15未満、つまり補正前の送信タイミングt14が開始タイミングt15よりも早い場合(t14<t15)(ステップS113のYes)、制御部121は、無線信号147の送信タイミングt14を(d3−d1×2)遅らせる(ステップS110)。そして、制御部121は、補正した送信タイミングで、無線信号147を移動局側送受信部123に送信させる(ステップS111)。以下、2回目の送信タイミング補正により送信された無線信号147を無線信号147−2とする。
【0046】
無線信号147−2は、移動局MSの受信フレーム149の開始タイミングt15に届く。よって、移動局MSは、無線信号147−2を受信できる。移動局MSは、受信許容範囲を所定の値αに維持しようとするため、無線信号147−2を受け、受信フレーム149(及び送信フレーム151)をα早める。つまり、移動局MSは、新たな受信フレーム153(及び送信フレーム155)を設定する。移動局MSは、変更後の受信フレーム153の開始タイミングt16の情報を無線信号に含めて、中継装置101に送信することができる。
【0047】
移動局側送受信部123は、変更後の開始タイミングt16の情報を受信し(ステップS112)、制御部121は、開始タイミングt16と無線信号147の補正前の送信タイミングt14とを比較する(ステップS113)。図8に示されるように、2回に亘る送信タイミングの補正により、補正前の送信タイミングt14が開始タイミングt16以上になると(t14≧t16)(ステップS113のNo)、制御部121は、無線信号147の送信タイミングt14を補正せずに、当該無線信号147を移動局側送受信部123に送信させる(ステップS109)。
【0048】
無線信号147は、移動局MSの受信フレーム153内に届き、移動局MSは、無線信号147を受信できる。移動局MSは、受信許容範囲が所定の値αになるように、更に受信フレーム153(及び送信フレーム155)を早め、新たな受信フレーム157(及び送信フレーム159)を設定する。よって、移動局MSは、ハンドオーバ後の基地局BS2からの信号を受信許容範囲が所定の値αとなる受信タイミングで受信できるようになる。これにより、基地局BS2と移動局MSとの同期が確立されたことになる。
【0049】
無線信号147の送信タイミングの補正量は、1回目は(d3−d1)となり、2回目は(d3−d1×2)となる。つまり、制御部121は、送信タイミングの補正量を段階的に小さくすることにより、移動局MSは、受信許容範囲が所定の値αとなる受信フレーム157を設定することができる。
【0050】
このように本実施形態では、中継装置101の制御部121は、移動局側送受信部123を介して、移動局MSにおける無線信号145の受信タイミングt12と移動局MSの受信フレーム141の開始タイミングt11との間の受信許容範囲d1を取得する。そして、制御部121は、ハンドオーバにより通信先の基地局が切り替わると、中継装置101におけるハンドオーバ前の基地局BS1及びハンドオーバ後の基地局BS2からの無線信号の受信タイミングの差分d3を算出する。続いて、制御部121は、差分d3が受信許容範囲d1を超えると、移動局MSの受信タイミングが受信フレーム141内になるように、無線信号147の送信タイミングを補正する。つまり、制御部121は、ハンドオーバにより通信先の基地局が切り替わると、ハンドオーバ後の基地局からの同期信号に基づく無線信号を送信した場合に移動局MSが受信できるか否かを判断する。そして、移動局MSが受信できないと判断される場合には、制御部121は、移動局MSが受信できるように無線信号の送信タイミングをずらして送信する。これにより、ハンドオーバ後により通信先の基地局が変わっても、移動局MSは無線信号を受信でき、基地局BS2と通信を継続することができる。
【0051】
また、本実施形態では、制御部121は、ハンドオーバ後の基地局BS2からの同期信号に基づく無線信号147の送信タイミングの補正量を段階的に小さくすることができる。つまり、無線信号147の送信タイミングを遅らせる量を小さくしていくことにより、移動局MSの受信フレームの開始タイミングは早まり、無線信号147の送信タイミングをずらさなくても、無線信号147が受信フレーム内に収まるようになる。これにより、移動局MSの受信フレームの受信許容範囲を所定の値に近づけることができ、移動局MSと基地局BS2との同期を確立することができる。
【0052】
本発明を諸図面や実施例に基づき説明してきたが、当業者であれば本開示に基づき種々の変形や修正を行うことが容易であることに注意されたい。従って、これらの変形や修正は本発明の範囲に含まれることに留意されたい。
【0053】
例えば、各部材、各手段、各ステップなどに含まれる機能などは論理的に矛盾しないように再配置可能であり、複数の手段やステップなどを1つに組み合わせたり、或いは分割したりすることが可能である。
【0054】
上述の本発明の実施形態の説明において、ハンドオーバにより切り替わる中継装置101の通信先は基地局であるとして説明したが、本発明はこの態様に限定されるものではない。例えば、複数の中継装置により基地局と移動局との通信を中継している場合、ハンドオーバにより切り替わる中継装置の通信先を中継装置とすることもできる。また、例えば、移動局側ユニットが他の中継装置を通信先とする中継装置は、当該他の中継装置から受信許容範囲の情報を取得し、上述のように、無線信号の送信タイミングを補正することもできる。
【符号の説明】
【0055】
11 無線通信システム
101 中継装置
103 車両
105 方向
107 位置
111 基地局側ユニット
113 移動局側ユニット
115 信号ケーブル
117 基地局側送受信部
119 記憶部
121 制御部
123 移動局側送受信部
131、135、138、145、147、147−1、147−2 無線信号
133、137、141、149、153、157 受信フレーム
139、140、143、151、155、159 送信フレーム
BS1、BS2 基地局
MS 移動局
d1、d2 受信許容範囲
d3 差分
t1、t4、t11、t15、t16 開始タイミング
t2、t3、t12 受信タイミング
t13 終了タイミング
t14 送信タイミング
α 所定の値
【技術分野】
【0001】
本発明は、中継装置及び通信制御方法に関するものである。
【背景技術】
【0002】
移動局が基地局と通信するためには、移動局は基地局からの無線電波が届く範囲に位置する必要がある。しかし、山岳地帯や高層ビル等が建ち並ぶ市街地では、障害物が多いため無線電波が届きにくい領域が存在する。また、屋外に設置された基地局からは、建物の内部や地下には、電波が届かない領域が多く存在する。特に、IEEE標準規格802.16eを基に規格化されたWiMAX(Worldwide Interoperability for Microwave Access)(登録商標)等の高速無線通信方式では、2.5GHz以上の高周波数帯の電波が使用されるが、このような電波は直進性が強く、障害物を回りこむ性質が弱い。そのため、WiMAX等は障害物の影響を強く受ける。このような電波が届かない領域をカバーするため、基地局と移動局との間の無線電波を中継する中継装置(レピータ)が必要となる。中継装置は、基地局と通信を行う基地局側ユニット(ドナー部又はMS(Mobile Station)部)と、移動局と通信を行う移動局側ユニット(サービス部又はBS(Base Station)部)とを有している。
【0003】
基地局と移動局とが中継装置を介して通信を行うためには、基地局−基地局側ユニット間と移動局側ユニット−移動局間とで同期を確立する必要がある。ここで、従来の同期確立方法について説明する(例えば、特許文献1参照)。まず、基地局側ユニットが、同期信号(プリアンブル)を含む無線信号を周期的に基地局から受信する。そして、基地局側ユニットは、周期的な同期信号を検出することにより、同期信号の受信タイミングと周期を取得し、基地局と同期を確立する。
【0004】
続いて、基地局側ユニットは、受信タイミングを移動局側ユニットに送る。移動局側ユニットは、受信タイミングに基づいて移動局に送信される同期信号を生成する。そして、移動局側ユニットは、同期信号を含む無線信号を周期的に移動局に送信する。移動局が、同期信号を検出して、自局の受信タイミングを移動局側ユニットの送信タイミングに合わせることにより、移動局側ユニット−移動局間とで同期が確立される。よって、基地局−基地局側ユニット間と移動局側ユニット−移動局間とで同期が確立されることになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−80991号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の中継装置では、基地局側ユニットの通信先である基地局がハンドオーバにより変更された場合の同期確立については想定されていない。例えば、中継装置が電車等の車両に搭載される場合、中継装置は車両と共に移動するため、ハンドオーバにより通信先の基地局が切り替わることがある。
【0007】
ハンドオーバが行われる前に、移動局は、中継装置(移動局側ユニット)と通信を行うために、図9に示される受信フレーム341及び送信フレーム343を有しているとする。受信フレームとは、移動局が中継装置からの信号を受信できる時間的範囲を示すものである。また送信フレームとは、移動局が中継装置へ信号を送信できる時間的範囲を示すものである。図9のTxは移動局による送信を、Rxは移動局による受信をそれぞれ表している。中継装置からの無線信号345が図9のタイミングで送信されると、無線信号345は受信フレーム341内に収まる。よって、移動局は、無線信号345を受信することができる。
【0008】
中継装置のハンドオーバにより基地局側ユニットの通信先である基地局が切り替わると、移動局には、ハンドオーバ後の基地局から中継装置を介して新たなタイミングで同期信号を含む無線信号が送られてくる。しかし、移動局は、中継装置のハンドオーバにより当該中継装置における基地局側ユニットの通信先である基地局が切り替わったことを予め認識することはできない。そのため、移動局は、図10のようにハンドオーバ前と同じタイミングの受信フレーム341でハンドオーバ後の基地局からの無線信号を受信しようとする。
【0009】
このとき、中継装置からの無線信号347が受信フレーム341内に収まらないことがある。この場合、移動局は、無線信号347を受信することができないので、無線信号347を一過性のエラー信号と判断し、基地局に再送要求を行う。しかし、移動局は、エラー信号に合わせて受信フレーム341のタイミングを変更することはないので、再送されてきた無線信号も受信できない可能性が高い。よって、ハンドオーバ後の中継装置と移動局との間の同期確立が困難となり、通信が途切れてしまうおそれがある。
【0010】
従って、上記のような問題点に鑑みてなされた本発明の目的は、中継装置における、ハンドオーバによる基地局の切り替え後も移動局と基地局との間の通信を継続できる中継装置及び通信制御方法を提供することにある。
【課題を解決するための手段】
【0011】
上述した諸課題を解決すべく、第1の観点に係る発明は、
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置であって、
前記第1の通信装置と無線通信する第1の通信部と、
前記第2の通信装置と無線通信する第2の通信部と、
前記第1の通信部により受信された無線信号に基づくタイミングで、同期信号を含む無線信号を送信するように第2の通信部を制御する制御部と
を備え、前記制御部は、
前記第2の通信部を介して、前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲を取得し、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出し、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する
ものである。
【0012】
また、第2の観点に係る発明は、第1の観点に係る中継装置において、前記制御部は、前記無線信号の前記送信タイミングの補正量を段階的に小さくすることを特徴とするものである。
【0013】
上述したように本発明の解決手段を装置として説明してきたが、本発明はこれらに実質的に相当する方法、プログラム、プログラムを記録した記憶媒体としても実現し得るものであり、本発明の範囲にはこれらも包含されるものと理解されたい。
【0014】
例えば、本発明の第1の観点を方法として実現させた通信制御方法は、
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置における通信制御方法において、当該中継装置が、
前記第1の通信装置から無線信号を受信して、当該信号に基づくタイミングで、同期信号を含む無線信号を送信するステップと、
前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲の情報を前記第2の通信装置から受信するステップと、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出するステップと、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、前記同期信号を含む無線信号の送信タイミングを補正するステップと、
送信タイミングが補正された前記無線信号を前記第2の通信装置に送信するステップと
を含むものである。
【発明の効果】
【0015】
上記のように構成された本発明に係る中継装置及び通信制御方法によれば、中継装置が、移動局が受信できないタイミングで、無線信号を送信することはないため、移動局は、ハンドオーバ後の基地局と通信を継続できる。
【図面の簡単な説明】
【0016】
【図1】図1は、本発明の一実施形態に係る概略的な無線通信システム構成図である。
【図2】図2は、本発明の一実施形態に係る中継装置の概略構成を示す機能ブロック図である。
【図3】図3は、本発明の一実施形態に係る移動局の受信許容範囲を示す説明図である。
【図4】図4は、本発明の一実施形態に係る移動局の受信フレームの変更を示す説明図である。
【図5】図5は、本発明の一実施形態に係る中継装置の処理を示すフローチャートである。
【図6】図6は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。
【図7】図7は、本発明の一実施形態に係る中継装置の受信タイミングを示す説明図である。
【図8】図8は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。
【図9】図9は、従来の中継装置からの無線信号と移動局の受信フレームとの関係図である。
【図10】図10は、従来の中継装置からの無線信号と移動局の受信フレームとの関係図である。
【発明を実施するための形態】
【0017】
以下、本発明に係る一実施形態について、図面を参照して説明する。
【0018】
図1は、本発明の一実施形態に係る概略的な無線通信システム構成図である。無線通信システム11は、基地局BS(Base Station)(BS1及びBS2)(請求項における上位局である第1及び第3の通信装置)と、移動局MS(Mobile Station)(請求項における下位局である第2の通信装置)と、中継装置101とから構成されている。無線通信システム11の通信方式がWiMAXである場合、無線通信システム11には、直交周波数分割多重アクセス(OFDMA:Orthogonal Frequency Division Multiple Access)方式及び時分割複信(TDD:Time Division Duplex)方式が採用される。中継装置101は、WiMAX等の無線通信方式において、基地局BSと移動局MSとの間で送受信されるデータを中継する。当該中継装置101により、移動局MSは、基地局BSのセル(通信可能エリア)の範囲外に位置していても、基地局BSとデータを送受信できる。
【0019】
図1において、中継装置101は、車両103に搭載され、車両103と共に方向105に移動するものとする。車両103が位置107に移動したときにハンドオーバが実行され、中継装置101の通信先が基地局BS1(ハンドオーバ前の基地局)(第1の通信装置)から基地局BS2(ハンドオーバ後の基地局)(第3の通信装置)に切り替わるものとする。なお、本発明は、中継装置101が移動車両用であることに限定されるものではなく、基地局がハンドオーバにより切り替わる状況であれば、中継装置101を一体型又は分離型とすることができる。
【0020】
図2は、本発明の一実施形態に係る中継装置の概略構成を示す機能ブロック図である。
【0021】
中継装置101は、基地局BSと通信を行う基地局側ユニット111と、移動局MSと通信を行う移動局側ユニット113とを備えている。基地局側ユニット111は、車両103の外部に配置され、移動局側ユニット113は、車両103の内部に配置され、基地局側ユニット111と移動局側ユニット113とは、LANケーブル等の信号ケーブル115によって接続されている。
【0022】
まず、基地局側ユニット111の機能ブロックについて説明する。基地局側ユニット111は、基地局側送受信部117(請求項における第1の通信部)と、記憶部119と、制御部121とを備えている。
【0023】
基地局側送受信部117は、アンテナを介して基地局BSと無線通信する。基地局側送受信部117は、受信した無線信号に対して低雑音での増幅及びダウンコンバート等を行うことによりベースバンド信号を生成し、制御部121に送る。また、基地局側送受信部117は、ベースバンド信号に対してアップコンバート及び増幅等を行うことにより無線信号を生成し、アンテナを介して当該無線信号を基地局BSに送信する。
【0024】
記憶部119は、各種情報を記憶するものであり、ワークメモリなどとしても機能する。なお、本実施形態では、基地局側ユニット111のみが、記憶部を有するが、本発明は、この構成に限定されるわけではない。例えば、移動局側ユニット113のみが記憶部を有し、当該記憶部が、基地局側ユニット111の各種情報を、信号ケーブル115を介して受け取り、記憶することができる。また、基地局側ユニット111及び移動局側ユニット113の双方が記憶部を有し、各々の記憶部が各々のユニットの情報を記憶することもできる。
【0025】
制御部121は、基地局側ユニット111及び移動局側ユニット113の各機能ブロックをはじめとして基地局側ユニット111及び移動局側ユニット113の全体を制御及び管理する。ここで、制御部121は、CPU(中央処理装置)等の任意の好適なプロセッサ上で実行されるソフトウェアとして構成したり、処理ごとに特化した専用のプロセッサ(例えばDSP(デジタルシグナルプロセッサ))によって構成したりすることもできる。なお、本実施形態では、基地局側ユニット111のみが、制御部を有するが、本発明は、この構成に限定されるわけではない。例えば、移動局側ユニット113のみが制御部を有し、当該制御部が、基地局側ユニット111の全体を、信号ケーブル115を介して制御及び管理することができる。また、基地局側ユニット111及び移動局側ユニット113の双方が制御部を有し、各々の制御部が各々のユニットを制御及び管理することもできる。
【0026】
制御部121についてより詳細に説明する。制御部121は、基地局側送受信部117により受信された基地局BSからの無線信号に含まれる同期信号(プリアンブル)を検出する。同期信号の検出は、基地局側送受信部117から送られてくるベースバンド信号をAD変換及び高速フーリエ変換(FFT)を行うことにより実現される。同期信号は基地局BSから周期的に送られてくるため、制御部121は、中継装置101が同期信号を受信する受信タイミングとその周期を、制御部121のカウンタにおけるクロックパルス数の換算により取得する。
【0027】
そして、制御部121は、基地局側送受信部117により受信された無線信号に基づいて、移動局MSに送信するための同期信号を生成する。つまり、制御部121は、取得した受信タイミングと周期から、中継装置101の受信タイミングと同じタイミングで移動局MSに送信される同期信号を生成する。制御部121は、同期信号をデータの先頭に付して無線信号を生成し、当該無線信号を送信するように後述する移動局側送受信部123を制御する。
【0028】
また、制御部121は、基地局側送受信部117により受信された無線信号の通信品質値を求める。通信品質値とは、例えば、SNR(Signal to Noise Ratio:信号対雑音比)、CNR(Carrier to Noise Ratio:搬送波対雑音比)、SINR(Signal to Interference and Noise Ratio:信号対干渉雑音比)、CINR(Carrier to Interference and Noise Ratio:搬送波対干渉雑音比)などであり、通信品質値が大きいほど中継装置101の通信先である基地局BSの通信状態の良さを表す。そして、制御部121は、求めた通信品質値が記憶部119に予め記憶されている閾値未満になると、ハンドオーバを行い、通信先の基地局を切り替える。なお、本発明は、ハンドオーバを行う基準が、通信品質値が閾値未満であることに限定されるものではなく、制御部121は、通信品質値が閾値以下になる場合に、ハンドオーバを行うこともできる。制御部121が行うその他の処理については、後述の図5の説明にて詳述する。
【0029】
次に、移動局側ユニット113の機能ブロックについて説明する。移動局側ユニット113は、移動局側送受信部123(請求項における第2の通信部)を備えている。
【0030】
移動局側送受信部123は、アンテナを介して移動局MSと無線通信するものであり、基地局側送受信部117と同様、無線信号からベースバンド信号の生成及びベースバンド信号から無線信号の生成を行う。移動局側送受信部123は、例えば、同期信号を含む無線信号を移動局MSに送信したり、移動局MSから受信許容範囲の情報を含む無線信号を受信したりする。ここで、移動局MSの受信許容範囲について図3を用いて説明する。移動局MSは、受信した無線信号131に含まれる同期信号から受信フレーム133を設定する。受信フレーム133とは、移動局MSが中継装置101(移動局側ユニット113)からの信号を受信できる時間的範囲を示すものである。移動局MSは、無線信号が受信フレーム133内に届くと、当該無線信号を受信することができる。受信許容範囲とは、受信フレーム133の開始タイミングt1と無線信号131の受信タイミングt2との間の時間的間隔d1である。通信環境の変化等によって無線信号が受信タイミングt2よりも早く届いたとしても、届くタイミングが受信許容範囲内であれば、移動局MSは、無線信号を受信できる。
【0031】
また、移動局MSは、受信フレームの受信許容範囲が所定の値αになるように、無線信号を受信する毎に受信フレームをずらすことができる。所定の値αは、移動局MSが基地局BSと同期を確立できた場合に、中継装置101を介した基地局BSからの無線信号を受信するタイミングを示すものである。以下、本実施形態では、所定の値αはd1であるとする。図4のように、移動局MSが、図3と同じ受信フレーム133において、無線信号135を受信タイミングt3で受信したとする。このとき受信許容範囲はd2(d2<d1)であるとする。移動局MSは、受信許容範囲をd1にするために、受信フレーム133の開始タイミングt1を(d1−d2)早め、開始タイミングt4の新たな受信フレーム137を設定することができる。これにより、移動局MSが受信フレーム133をずらした後に、無線信号138が無線信号135と同様のタイミングで移動局MSに届くと、受信許容範囲はd1となる。なお、受信フレームの移動に併せて、移動局MSが中継装置101へ信号を送信できる時間的範囲を示す送信フレーム139を送信フレーム140に変更することができる。
【0032】
続いて、中継装置101の同期信号の送信方法について、図5、図6、図7及び図8を参照して説明する。図5は、本発明の一実施形態に係る中継装置の処理を示すフローチャートである。図6及び図8は、本発明の一実施形態に係る移動局の受信タイミングの変遷を示す説明図である。図7は、本発明の一実施形態に係る中継装置の受信タイミングを示す説明図である。
【0033】
まず、移動局MSは、中継装置101を介して基地局BS1と同期を確立し、図6に示される受信フレーム141及び送信フレーム143を周期的に設定している。そして、移動局MSは、中継装置101を介して基地局BS1と通信を行っている。受信フレーム141の開始タイミングはt11であり、移動局MSは、受信許容範囲がd1となる受信タイミングt12で無線信号145を受信しているとする。
【0034】
移動局側送受信部123は、受信許容範囲の情報(d1)を含む無線信号を移動局MSから受信し(ステップS101)、制御部121に送る。
【0035】
制御部121は、無線信号から受信許容範囲の情報を取得する。そして、当該受信許容範囲の情報を記憶部119に記憶させる(ステップS102)。
【0036】
また、制御部121は、基地局BS1からの無線信号に含まれる同期信号から、当該無線信号の受信タイミングを取得し、記憶部119に記憶させる(ステップS103)。
【0037】
更に、制御部121は、基地局BS1からの無線信号の通信品質値を求め、記憶部119に記憶されている閾値と比較する。中継装置101を搭載する車両103が位置107まで移動すると、通信品質値が閾値未満となり、制御部121は、ハンドオーバを実行する(ステップS104)。ハンドオーバにより、中継装置101の通信先が基地局BS1(ハンドオーバ前の基地局)から基地局BS2(ハンドオーバ後の基地局)に切り替わる。
【0038】
中継装置101の基地局側送受信部117は、基地局BS2から同期信号を含む無線信号を受信する(ステップS105)。制御部121は、基地局側送受信部117により受信された無線信号から同期信号の受信タイミングとその周期を取得する(ステップS106)。そして、制御部121は、受信した無線信号に基づいて移動局MSに送信するための同期信号を生成する。
【0039】
次に、制御部121は、ハンドオーバ前の基地局BS1からの無線信号の受信タイミングと、ハンドオーバ後の基地局BS2からの無線信号の受信タイミングとの差分を算出する(ステップS107)。つまり、図7に示されるように、中継装置101が、ハンドオーバ前には基地局BS1から無線信号145を受信し、ハンドオーバ後には基地局BS2から無線信号147を受信している場合、制御部121は、受信タイミングの差分d3を算出する。
【0040】
制御部121は、算出した受信タイミングの差分d3と記憶部119に記憶されている移動局MSの受信許容範囲とを比較する(ステップS108)。差分d3が受信許容範囲d1以下である場合(d3≦d1)(ステップS108のYes)、制御部121は、生成された同期信号を先頭に有する無線信号147を移動局側送受信部123に送信させる(ステップS109)。差分d3が受信許容範囲d1以下であるため、図6のように無線信号147は、移動局MSの受信フレーム141内に届く。よって、移動局MSは、無線信号147を受信できる。
【0041】
続いて、差分d3が受信許容範囲d1を超えている場合(d3>d1)(ステップS108のNo)について説明する。中継装置101が、生成した同期信号に基づいて無線信号147を移動局MSに送信すると、無線信号147は、図8に示されように移動局MSの受信フレーム141の開始タイミングt11よりも早く届いてしまう。つまり、移動局MSは、無線信号147を受信できない。そこで、制御部121は、無線信号147の送信タイミングt14を補正する(ステップS110)。
【0042】
具体的には、制御部121は、無線信号147の送信タイミングt14を(d3−d1)以上遅らせる。そうすることにより、移動局MSにおける無線信号147の受信タイミングが受信フレーム141内に収まることになる。なお、制御部121は、無線信号147の送信タイミングt14をd3よりも大きく遅らせる場合には、無線信号147の終了タイミングt13が受信フレーム141外にならないように無線信号147の送信タイミングt14をずらす必要がある。以下、本実施形態では、制御部121は、無線信号147の送信タイミングが移動局MSの受信フレームの開始タイミングに重なるように送信タイミングをずらすとする。
【0043】
よって、制御部121は、無線信号147の送信タイミングt14を(d3−d1)遅らせる。そして、制御部121は、補正された送信タイミングで、無線信号147を移動局側送受信部123に送信させる(ステップS111)。以下、1回目の送信タイミング補正により送信された無線信号147を無線信号147−1とする。
【0044】
すると、無線信号147−1は、移動局MSの受信フレーム141の開始タイミングt11に届く。よって、移動局MSは、無線信号147−1を受信できる。移動局MSは、受信許容範囲を所定の値α(=d1)に維持しようとするため、無線信号147−1を受け、受信フレーム141(及び送信フレーム143)をα早める。つまり、移動局MSは、新たな受信フレーム149(及び送信フレーム151)を設定する。そして、移動局MSは、変更後の受信フレーム149の開始タイミングt15の情報を無線信号に含めて、中継装置101に送信することができる。
【0045】
移動局側送受信部123は、変更後の開始タイミングt15の情報を受信し(ステップS112)、制御部121は、開始タイミングt15と無線信号147の補正前の送信タイミングt14とを比較する(ステップS113)。補正前の送信タイミングt14が開始タイミングt15未満、つまり補正前の送信タイミングt14が開始タイミングt15よりも早い場合(t14<t15)(ステップS113のYes)、制御部121は、無線信号147の送信タイミングt14を(d3−d1×2)遅らせる(ステップS110)。そして、制御部121は、補正した送信タイミングで、無線信号147を移動局側送受信部123に送信させる(ステップS111)。以下、2回目の送信タイミング補正により送信された無線信号147を無線信号147−2とする。
【0046】
無線信号147−2は、移動局MSの受信フレーム149の開始タイミングt15に届く。よって、移動局MSは、無線信号147−2を受信できる。移動局MSは、受信許容範囲を所定の値αに維持しようとするため、無線信号147−2を受け、受信フレーム149(及び送信フレーム151)をα早める。つまり、移動局MSは、新たな受信フレーム153(及び送信フレーム155)を設定する。移動局MSは、変更後の受信フレーム153の開始タイミングt16の情報を無線信号に含めて、中継装置101に送信することができる。
【0047】
移動局側送受信部123は、変更後の開始タイミングt16の情報を受信し(ステップS112)、制御部121は、開始タイミングt16と無線信号147の補正前の送信タイミングt14とを比較する(ステップS113)。図8に示されるように、2回に亘る送信タイミングの補正により、補正前の送信タイミングt14が開始タイミングt16以上になると(t14≧t16)(ステップS113のNo)、制御部121は、無線信号147の送信タイミングt14を補正せずに、当該無線信号147を移動局側送受信部123に送信させる(ステップS109)。
【0048】
無線信号147は、移動局MSの受信フレーム153内に届き、移動局MSは、無線信号147を受信できる。移動局MSは、受信許容範囲が所定の値αになるように、更に受信フレーム153(及び送信フレーム155)を早め、新たな受信フレーム157(及び送信フレーム159)を設定する。よって、移動局MSは、ハンドオーバ後の基地局BS2からの信号を受信許容範囲が所定の値αとなる受信タイミングで受信できるようになる。これにより、基地局BS2と移動局MSとの同期が確立されたことになる。
【0049】
無線信号147の送信タイミングの補正量は、1回目は(d3−d1)となり、2回目は(d3−d1×2)となる。つまり、制御部121は、送信タイミングの補正量を段階的に小さくすることにより、移動局MSは、受信許容範囲が所定の値αとなる受信フレーム157を設定することができる。
【0050】
このように本実施形態では、中継装置101の制御部121は、移動局側送受信部123を介して、移動局MSにおける無線信号145の受信タイミングt12と移動局MSの受信フレーム141の開始タイミングt11との間の受信許容範囲d1を取得する。そして、制御部121は、ハンドオーバにより通信先の基地局が切り替わると、中継装置101におけるハンドオーバ前の基地局BS1及びハンドオーバ後の基地局BS2からの無線信号の受信タイミングの差分d3を算出する。続いて、制御部121は、差分d3が受信許容範囲d1を超えると、移動局MSの受信タイミングが受信フレーム141内になるように、無線信号147の送信タイミングを補正する。つまり、制御部121は、ハンドオーバにより通信先の基地局が切り替わると、ハンドオーバ後の基地局からの同期信号に基づく無線信号を送信した場合に移動局MSが受信できるか否かを判断する。そして、移動局MSが受信できないと判断される場合には、制御部121は、移動局MSが受信できるように無線信号の送信タイミングをずらして送信する。これにより、ハンドオーバ後により通信先の基地局が変わっても、移動局MSは無線信号を受信でき、基地局BS2と通信を継続することができる。
【0051】
また、本実施形態では、制御部121は、ハンドオーバ後の基地局BS2からの同期信号に基づく無線信号147の送信タイミングの補正量を段階的に小さくすることができる。つまり、無線信号147の送信タイミングを遅らせる量を小さくしていくことにより、移動局MSの受信フレームの開始タイミングは早まり、無線信号147の送信タイミングをずらさなくても、無線信号147が受信フレーム内に収まるようになる。これにより、移動局MSの受信フレームの受信許容範囲を所定の値に近づけることができ、移動局MSと基地局BS2との同期を確立することができる。
【0052】
本発明を諸図面や実施例に基づき説明してきたが、当業者であれば本開示に基づき種々の変形や修正を行うことが容易であることに注意されたい。従って、これらの変形や修正は本発明の範囲に含まれることに留意されたい。
【0053】
例えば、各部材、各手段、各ステップなどに含まれる機能などは論理的に矛盾しないように再配置可能であり、複数の手段やステップなどを1つに組み合わせたり、或いは分割したりすることが可能である。
【0054】
上述の本発明の実施形態の説明において、ハンドオーバにより切り替わる中継装置101の通信先は基地局であるとして説明したが、本発明はこの態様に限定されるものではない。例えば、複数の中継装置により基地局と移動局との通信を中継している場合、ハンドオーバにより切り替わる中継装置の通信先を中継装置とすることもできる。また、例えば、移動局側ユニットが他の中継装置を通信先とする中継装置は、当該他の中継装置から受信許容範囲の情報を取得し、上述のように、無線信号の送信タイミングを補正することもできる。
【符号の説明】
【0055】
11 無線通信システム
101 中継装置
103 車両
105 方向
107 位置
111 基地局側ユニット
113 移動局側ユニット
115 信号ケーブル
117 基地局側送受信部
119 記憶部
121 制御部
123 移動局側送受信部
131、135、138、145、147、147−1、147−2 無線信号
133、137、141、149、153、157 受信フレーム
139、140、143、151、155、159 送信フレーム
BS1、BS2 基地局
MS 移動局
d1、d2 受信許容範囲
d3 差分
t1、t4、t11、t15、t16 開始タイミング
t2、t3、t12 受信タイミング
t13 終了タイミング
t14 送信タイミング
α 所定の値
【特許請求の範囲】
【請求項1】
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置であって、
前記第1の通信装置と無線通信する第1の通信部と、
前記第2の通信装置と無線通信する第2の通信部と、
前記第1の通信部により受信された無線信号に基づくタイミングで、同期信号を含む無線信号を送信するように第2の通信部を制御する制御部と
を備え、前記制御部は、
前記第2の通信部を介して、前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲を取得し、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出し、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する
中継装置。
【請求項2】
請求項1に記載の中継装置において、前記制御部は、
前記無線信号の前記送信タイミングの補正量を段階的に小さくする
ことを特徴とする中継装置。
【請求項3】
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置における通信制御方法において、当該中継装置が、
前記第1の通信装置から無線信号を受信して、当該信号に基づくタイミングで、同期信号を含む無線信号を送信するステップと、
前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲の情報を前記第2の通信装置から受信するステップと、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出するステップと、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、前記同期信号を含む無線信号の送信タイミングを補正するステップと、
送信タイミングが補正された前記無線信号を前記第2の通信装置に送信するステップと
を含む通信制御方法。
【請求項1】
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置であって、
前記第1の通信装置と無線通信する第1の通信部と、
前記第2の通信装置と無線通信する第2の通信部と、
前記第1の通信部により受信された無線信号に基づくタイミングで、同期信号を含む無線信号を送信するように第2の通信部を制御する制御部と
を備え、前記制御部は、
前記第2の通信部を介して、前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲を取得し、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出し、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、無線信号の送信タイミングを補正する
中継装置。
【請求項2】
請求項1に記載の中継装置において、前記制御部は、
前記無線信号の前記送信タイミングの補正量を段階的に小さくする
ことを特徴とする中継装置。
【請求項3】
上位局である第1の通信装置と下位局である第2の通信装置との間で送受信される無線信号を中継する中継装置における通信制御方法において、当該中継装置が、
前記第1の通信装置から無線信号を受信して、当該信号に基づくタイミングで、同期信号を含む無線信号を送信するステップと、
前記第2の通信装置における無線信号の受信タイミングと当該第2の通信装置の受信フレームの開始タイミングとの間の受信許容範囲の情報を前記第2の通信装置から受信するステップと、
ハンドオーバにより上位局が第3の通信装置に切り替わると、前記中継装置におけるハンドオーバ前の第1の通信装置及びハンドオーバ後の第3の通信装置からの無線信号の受信タイミングの差分を算出するステップと、
前記差分が前記受信許容範囲を超えると、前記第2の通信装置の前記受信タイミングが前記受信フレーム内になるように、前記同期信号を含む無線信号の送信タイミングを補正するステップと、
送信タイミングが補正された前記無線信号を前記第2の通信装置に送信するステップと
を含む通信制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−66063(P2013−66063A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−203569(P2011−203569)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
[ Back to top ]