
主偏波/交差偏波マッピングを用いる測位システム
主偏波/交差偏波レーダマッピングを使用するローカル測位システムが提供される。本方法の一実施形態では、第1の偏波を有する少なくとも第1の電磁パルスが送信される。第1の偏波を優先的に有する第1のリターン信号が各期間にわたって受信される。第1のリターン信号は、測位システムのレーダ検出エリア内の物体に対応する第1のリターンパルスを分離するように処理される。第1の偏波を有する少なくとも第2の電磁パルスも送信される。第2の偏波を優先的に有する第2のリターン信号が各期間にわたって受信される。第2のリターン信号は、物体に対応する第2のリターンパルスを分離するように処理される。物体の特性が、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って求められる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、包括的には、測位システムに関し、より具体的には、主偏波(co-polarized)/交差偏波(cross-polarized)マッピングを用いて測位システムに対する物体の位置を求めるためのシステム及び方法に関する。
本願は、2003年7月3日に出願された係属中の米国特許出願第10/614,097号の部分継続出願である。米国特許出願第10/614,097号は、その全体が参照により本明細書に援用される。
以下の出願は、本願に関連し、参照により本明細書に援用される。
2005年4月11日に出願された「Improved Radar System for Improved Positioning」という発明の名称の米国特許出願第11/103,964号;
2005年4月11日に出願された「Positioning System with a Sparse Antenna Array」という発明の名称の米国特許出願第11/103,965号;
2005年4月11日に出願された「Positioning System with Intentional Multi-Path Signal」という発明の名称の米国特許出願第11/103,950号;
2005年4月11日に出願された「Decoherence Plate for Use in a Communications System」という発明の名称の米国特許出願第11/104,007号。
【背景技術】
【0002】
ローカル測位システムは、特に、自律走行車の用途及び精密施工ツールの用途で、ナビゲーション能力を必要とする移動デバイスを実現するために重要な存在となってきている。GPS等のグローバル測位システムは、通例、10cm程の中程度の精度の位置情報しか提供せず、水平線近くまで空の澄んだ視界を必要とする。能動コンポーネント又は受動コンポーネントのいずれかが作業範囲(ボリューム)に分散されているローカル測位システムは、はるかに高い精度の測位(たとえば、1cmより高い精度の測位)を可能にすることができ、最も複雑な閉鎖形状(enclosed geometry)であっても動作の必要があるときはユーザによるシステムの拡張を可能にする。
【0003】
従来のローカル測位システムは、アコースティック(音波)測距システム及びレーザ測距システムを含む。アコースティックシステムは、通常、トランスポンダビーコンを使用して、デバイスのネットワーク内における距離を測定する。それらのデバイスのいくつかは、固定されてローカル座標系を形成する。
あいにく、空気中の音波伝播特性のために、アコースティックシステムは、1cm以上の精度までの距離しか測定することができず、比較的短い距離間隔にわたってしか測定することができない。レーザに基づくローカル測位システムは、デバイスとプリズム等の1又は複数の反射物体との間の角度及び距離の双方の測定値を利用して、デバイスの位置を三角測量又は三辺測量(trilateralate)する。しかしながら、レーザシステムは、現在、システムコストを3万ドル以上にすることがある高価な指示メカニズム(pointing mechanism)を使用している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
2次元(2D)の位置又は3次元(3D)の位置を数ミリメートルの精度まで求めることができる比較的低コスト(たとえば、2000ドル未満)のローカル測位システムは、屋内での精密施工及び屋外での精密施工、採鉱、精密農業、並びにスタジアムフィールドの草刈り及び処置のような応用分野で大きな一組の見込みのある製品の可能性を与える。本発明は、従来のローカル測位システムのコストの限界及び制度の限界を克服することを目的とする。
【課題を解決するための手段】
【0005】
レーダマッピングのシステム及び方法は、低コストであるが、高精度のローカル測位システムを提供する。
本方法の一実施の形態では、搬送波信号周波数及び第1の偏波を有する第1の電磁パルスが送信される。第1のリターン信号が、各期間にわたって受信される。第1のリターン信号は、第1の偏波を優先的に有する。第1のリターン信号は、測位システムのレーダ検出エリア内の物体からの第1のリターンパルスを含む。第1のリターン信号は、当該第1のリターン信号から第1のリターンパルスを分離するように処理される。
【0006】
搬送波信号周波数及び第1の偏波を有する第2の電磁パルスが送信される。第2のリターン信号が、各期間にわたって受信される。第2のリターン信号は、第2の偏波を優先的に有する。第2のリターン信号は、測位システムのレーダ検出エリア内の物体からの第2のリターンパルスを含む。第2のリターン信号は、当該第2のリターン信号から第2のリターンパルスを分離するように処理される。物体の特性が、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って求められる。
【0007】
いくつかの実施の形態では、第1の偏波は右旋円偏波であり、第2の偏波は左旋円偏波である。いくつかの実施の形態では、第1の偏波は左旋円偏波であり、第2の偏波は右旋円偏波である。
本システムの一実施の形態では、デバイスは、搬送波信号周波数及び第1の偏波を有する第1の電磁パルスを送信するように構成されている。デバイスは、各期間にわたって、測位システムのレーダ検出エリア内の物体から第1のリターンパルスを含む第1のリターン信号を受信するように構成されている。第1のリターン信号は、第1の偏波を優先的に有する。デバイスは、第1のリターン信号から第1のリターンパルスを分離するように第1のリターン信号を処理するように構成されている。
【0008】
また、デバイスは、搬送波信号周波数及び第1の偏波を有する第2の電磁パルスを送信するようにも構成されている。デバイスは、各期間にわたって、物体からの第2のリターンパルスを含む第2のリターン信号を受信するように構成されている。受信される第2のリターン信号は、第2の偏波を優先的に有する。デバイスは、第2のリターン信号から第2のリターンパルスを分離するように第2のリターン信号を処理するように構成されている。デバイスは、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の特性を求めるように構成されている。
いくつかの実施の形態では、第1の偏波は右旋円偏波であり、第2の偏波は左旋円偏波である。いくつかの実施の形態では、第1の偏波は左旋円偏波であり、第2の偏波は右旋円偏波である。
【発明を実施するための最良の形態】
【0009】
以下の説明において、同様の参照符号は、図面のいくつかの図を通じて対応する部分を示している。
本発明の実施形態を詳細に説明する。実施形態の例は、添付図面に示されている。以下の詳細な説明では、本発明の徹底した理解を提供するために、多数の具体的な詳細が述べられている。しかしながら、本発明は、これらの具体的な詳細がなくても実施できることが当業者には明らかであろう。それ以外の場合には、本発明の態様を不必要に分かりにくくしないように、既知の方法、手順、コンポーネント(構成要素)、及び回路は詳細に説明されていない。
【0010】
電磁信号(時に、電磁波と呼ばれる)は、電界ベクトル成分及び磁界ベクトル成分を有する。電磁信号の偏波は、電磁信号の伝播方向に対する直交面での電磁信号の電界ベクトルの形状及び軌跡によって説明される。電磁信号の偏波には、直線偏波、楕円偏波、右旋楕円偏波、左旋楕円偏波、右旋円偏波(RHCP)、及び左旋円偏波(LHCP)が含まれ得る。
【0011】
一般に、物体からの反射又は散乱時に、電磁信号の位相の変化によって、電磁信号の偏波は変化する。散乱には、鏡面反射及び散漫散乱が含まれる。鏡面反射において偏波が変化する結果、物体のフレネル反射係数と、電磁信号が伝播する空気等の媒体のフレネル反射係数との間に差が生じる。この技術分野で知られているように、フレネル反射係数は、電磁信号の波長、電磁信号の入射角、物体及び媒体の複素屈折率、並びに、もしあれば、物体及び/又は媒体の複素屈折率の異方性の関数である。散漫散乱における偏波の変化には、物体(たとえば、木の樹皮)の表面の粗さによる複数の散乱事象及び物体(たとえば、木、その枝及び葉、又は木の葉)のボリューム(volume)全体を通じて屈折率が空間的に不均質であることによる複数の散乱事象が含まれる。
【0012】
RHCP又はLHCPを最初に有する電磁信号に対して、木等のクラッタは、主として逆の円偏波を有する反射電磁信号を返す。これとは逆に、RHCP又はLHCPを最初に有する電磁信号に対して、ほぼ垂直の2つの面を有する二面リフレクタとしても知られているコーナリフレクタでは、リターン電磁信号は、主として最初の円偏波を有する。
【0013】
いくつかのローカル測位システムは、デバイスから、既知の位置を有する1又は複数の物体までの1又は複数の距離を求めることによってデバイスの位置を求める。いくつかのローカル測位システムでは、物体はランドマークである。いくつかのローカル測位システムでは、ランドマークは受動リフレクタであり、たとえば、バイヘデラル(二面)リフレクタである。受動リフレクタを使用するローカル測位システムの課題は、受動ランドマークに対応するリターン電磁信号と、ローカル測位システムのレーダ検出エリア内の他の物体に対応するリターン電磁信号とを区別することである。加えて、自然物と受動ランドマーク等の人工物とを区別することは多くの場合困難である。
【0014】
いくつかのローカル測位システムでは、ランドマークは能動ランドマークである。能動ランドマークは、デバイスから電磁信号を受信して、リターン電磁信号を送信する。いくつかの実施形態では、リターン電磁信号は偏波を有する。リターン信号の偏波は、受信信号の偏波と同じにすることもできるし、異なるようにすることもできる。
【0015】
ランドマーク及び他の物体からの反射の際の電磁信号の偏波の変化を使用して、ランドマークからの反射と他の物体からの反射とを区別するのに役立てることができる。詳細には、各偏波を有する電磁信号を送信し、同じ各偏波(主偏波)又は直交偏波(交差偏波)を有するリターン電磁信号に対応する受信信号の相対的な信号強度又は信号電力を比較することによって、物体の特性を求めることができる。たとえば、求められる特性は、物体の粗さとすることができる。この特性によって、受動ランドマークを他の物体と区別することが可能になり、人工物を自然物と区別することが可能になる。
【0016】
たとえば、主偏波(同一偏波)信号強度に対する交差偏波(直交偏波)信号強度の比を求めることができる。この比は、滑らかな表面では非常に小さく、表面が粗くなるにつれて増加し、表面の粗さのサイズがほぼ電磁信号の波長程度である特徴を有する場合にピークとなる。同様に、この比は、物体のボリューム全体を通じて屈折率が空間的に不均質であることにより複数の散乱事象が生じる場合も高くなる。一方、滑らかな受動バイヘデラルリフレクタの場合、この比は小さい。
【0017】
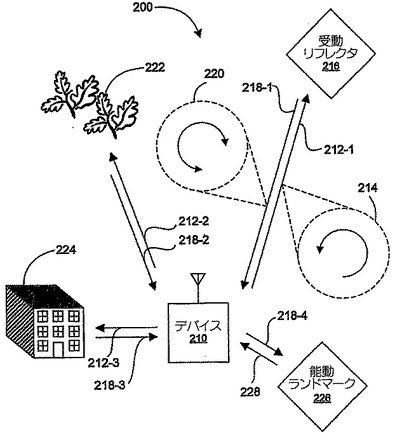
図2は、ローカル測位システム200の一実施形態を示している。いくつかの実施形態では、システム200のレーダ検出エリアは、最大寸法として50m、100m、250m、500m、1000m、5000m、又は10000mを有することができる。デバイス210は、搬送波信号周波数及び第1の偏波214を有する1又は複数の電磁パルス212を送信する。第1の偏波214は、この例示ではLHCPである。他の実施形態では、第1の偏波214はRHCPである。一実施形態では、電磁パルス212は、継続時間が1ナノ秒(ns)であり、6ギガヘルツ(GHz)の搬送波信号周波数を有する。他の実施形態は、電磁パルス212の継続時間及び搬送波信号周波数の組み合わせとして、1ns及び24GHz、5ns及び6GHz、並びに1ns及び77GHzの組み合わせを使用することができる。他の多くのパルス継続時間及び搬送波信号周波数をさらに他の実施形態で使用することができる。
【0018】
電磁パルス212は、システム200のレーダ検出エリア内の物体によって反射される。物体には、受動リフレクタ216、木の葉222、及び建物224が含まれる。図2は、1つのデバイス210及び1つの受動リフレクタ216を有する一実施形態を示しているが、いくつかの実施形態は、2つ以上のデバイス、2つ以上の受動リフレクタ、又はその双方を有することができる。いくつかの実施形態では、受動リフレクタ216は、受動バイヘデラルリフレクタ又は受動コーナキューブリフレクタである。デバイス210は、或る期間にわたって1又は複数のリターンパルスを含む1又は複数のリターン信号218を受信する。リターン信号218−1又は218−2等の(特定の物体が最初のパルス(複数可)を反射することによって生成された)各リターン信号の偏波220は、第1の偏波214とほぼ同じであるか、又は、第1の偏波214に対してほぼ直交している第2の偏波を有する。いくつかの実施形態では、第1の偏波214はRHCPであり、偏波220はLHCP又はRHCPのいずれかである。いくつかの実施形態では、第1の偏波214はLHCPであり、偏波220はLHCP又はRHCPのいずれかである。主偏波されたリターン信号218及び交差偏波されたリターン信号218の相対的な信号強度又は信号電力を比較することによって、物体の粗さ等の物体の特性を求めることができる。これによって、滑らかな表面を有する受動リフレクタ216を、木の葉222及び建物224と区別することが可能になる。
【0019】
詳細には、特定の領域(たとえば、デバイス210の近傍又は周囲)のレーダマップを生成するために、デバイス210は、搬送波信号周波数及び偏波214等の第1の偏波を有するパルス212−1等の少なくとも第1のパルスを送信する。デバイスは、偏波220等の第1の偏波を優先的に有するリターン信号218−1等の第1のリターン信号を受信する。第1のリターン信号は、少なくとも第1のリターンパルスを含む。デバイス210は、第1のリターン信号から第1のリターンパルスを分離するように第1のリターン信号を処理する。また、デバイスは、搬送波信号周波数及び第1の偏波を有するパルス212−2等の少なくとも第2のパルスも送信する。図2における送信パルス212及びリターン信号218の矢印は、例示のためのものにすぎず、必ずしも、パルス及びリターン信号が特定の指向性を有することを示すものではないことに留意されたい。いくつかの実施形態では、送信パルスは等方的であり、他の実施形態では、送信パルスは方向が絞られている。
【0020】
デバイスは、偏波220等の第2の偏波を優先的に有するリターン信号218−2等の第2のリターン信号を受信する。第2の偏波は、第1の偏波に対してほぼ直交している。第2のリターン信号は、少なくとも第2のリターンパルスを含む。デバイス210は、第2のリターン信号から第2のリターンパルスを分離するように第2のリターン信号を処理する。デバイス210は、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の1又は複数の特性を求める。いくつかの実施形態では、この特性は、物体の少なくとも1つの表面の粗さである。例示的な一実施形態では、第1の偏波はRHCPであり、第2の偏波はLHCPである。別の例示的な実施形態では、第1の偏波はLHCPであり、第2の偏波はRHCPである。さらに別の実施形態では、双方の偏波を有するリターン信号が、送信パルスに応答してほぼ同時に受信される。
【0021】
ローカル測位システム200の一変形では、物体は、少なくとも1つのオプションの能動ランドマーク226を含むことができる。能動ランドマーク226は、搬送波信号周波数を有する電磁パルス226を返す。リターン電磁パルスの偏波220は、第1の偏波214とほぼ同じであるか、又は、第1の偏波214に対してほぼ直交している第2の偏波を有する。いくつかの実施形態では、リターン電磁パルスの偏波228は、搬送波信号周波数と異なる第2の搬送波信号周波数を有する。いくつかの実施形態では、リターン電磁パルス226は、振幅変調又は周波数変調されている。いくつかの実施形態では、リターン電磁パルス226は方形波である。いくつかの実施形態では、リターン電磁パルス226は符号化されている。たとえば、リターン電磁パルスは、オンオフキーイング、直交振幅変調、連続位相周波数シフトキーイング、周波数シフトキーイング、位相シフトキーイング、差動位相シフトキーイング、直交位相シフトキーイング、最小っシフトキーイング、ガウス型最小シフトキーイング、パルス位置変調、パルス振幅変調、パルス幅変調、ウォルシュ符号変調、ゴールド符号変調、バーカー符号変調、擬似ランダム雑音列変調、又は、ゼロ時間オフセットで1の自己相関を有し、非ゼロ時間オフセットでほぼ0に近い自己相関を有するDCフリー符号を使用して符号化することができる。能動ランドマーク226を使用することによって、ローカル測位システム200においてデバイス210からより大きな間隔の場所においてリターン電磁パルス228を区別することが可能になる。
【0022】
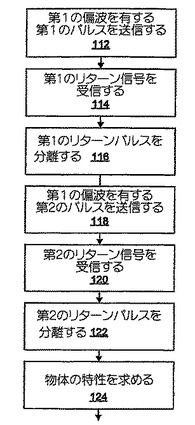
図1は、主偏波/交差偏波レーダマッピング(co-polarized and cross-polarized radar mapping)を用いる測位システムにおけるオペレーションの一実施形態を示すフローチャートである。第1の偏波を有する第1のパルスが送信される(ステップ112)。少なくとも第1のリターンパルスを含む第1のリターン信号が受信される(ステップ114)。第1のリターン信号は、第1のリターンパルスを分離するように処理される(ステップ116)。第1の偏波を有する第2のパルスが送信される(ステップ118)。少なくとも第2のリターンパルスを含む第2のリターン信号が受信される(ステップ120)。第2のリターン信号は、第2のリターンパルスを分離するように処理される(ステップ122)。第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の特性が求められる(ステップ124)。
【0023】
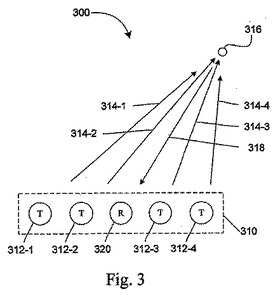
図3は、測位システムの一実施形態300の図である。デバイス310は、複数の送信機312及び1つの受信機320を備える。デバイス310は、少なくとも第1の組のパルス314を送信する。パルス314は、物体316から散乱反射される。デバイス310は、リターン信号318を受信する。
【0024】
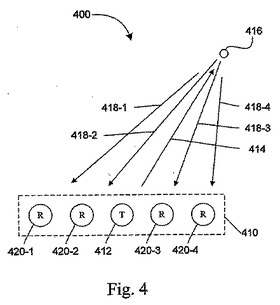
図4は、測位システムの一実施形態400の図である。デバイス410は、1つの送信機412及び複数の受信機420を備える。デバイス410は、少なくとも第1のパルス414を送信する。パルス414は、物体416から散乱反射される。デバイス410は、一組のリターン信号418を受信する。
【0025】
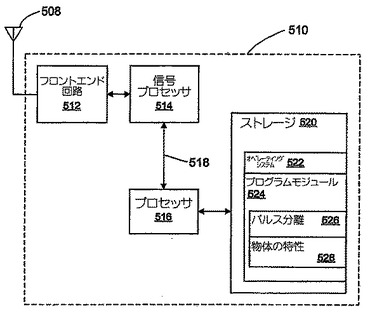
図5は、測位システムの一実施形態におけるデバイス210、デバイス310、デバイス410等の一般的なデバイス510の構成要素(コンポーネント)の図である。デバイス510の1又は複数の送信機及び1又は複数の受信機は示されていない。デバイスは、少なくとも1つのアンテナ508を備える。いくつかの実施形態では、デバイス510は、少なくとも1つの円偏波アンテナを備えることができる。いくつかの実施形態では、デバイス510は、送信及び受信に使用される少なくとも1つの偏波アンテナを備えることができる。一実施形態では、デバイス510は、2つのアンテナを備え、1つはRHCP信号の送受信用であり、もう1つはLHCP信号の送受信用である。
【0026】
デバイス510は、フロントエンド回路512及び1又は複数の信号を変更するための信号プロセッサ514を備える。この変更は、変調符号の増幅、フィルタリング、及び/又は除去を含むことができる。デバイス510は、1又は複数の処理ユニット(CPU)516、メモリ520、及びこれらのコンポーネントを接続するための1又は複数の通信バス518を備える。代替的な実施形態では、デバイス510の機能の一部又は全部を、1又は複数の特定用途向け集積回路(ASIC)で実施することができ、それによって、処理ユニット516の必要性をなくすことができるか、又は処理ユニット516の役割を削減することができる。メモリ520は、高速ランダムアクセスメモリを含むことができ、また、1又は複数の磁気ディスクストレージデバイス等の不揮発性メモリも含むことができる。メモリ520は、処理ユニット520から遠隔に配置された大容量記憶装置を含むことができる。
【0027】
メモリ520は、ハードウェア依存タスクを実行するためのさまざまな基本システムサービスをハンドリングするプロシージャを含んだオペレーティングシステム522を記憶する。また、メモリ520は、1又は複数のプログラムモジュール524も記憶する。プログラムモジュール524は、リターン信号から1又は複数のパルスを分離するパルス分離モジュール又は一組の命令526を含む。また、プログラムモジュール524は、主偏波リターン信号及び交差偏波リターン信号の相対的な信号強度に従って物体の特性を求める物体特性決定モジュールすなわち一組のインストラクション(命令)528も含む。
【0028】
メモリ520のモジュールすなわち一組のインストラクションは、処理ユニット516によって実行される。加えて、デバイス510は、実行可能プロシージャ、サブモジュール、テーブル、及び他のデータ構造体(図示せず)を含むことができる。いくつかの実施形態では、追加のモジュール及びデータ構造体、又は、異なるモジュール及びデータ構造体を使用することができ、上記に列挙したモジュール及び/又はデータ構造体のいくつかは、使用されない場合がある。いくつかの実施形態では、当該技術分野で知られているように、デバイス510の能力は、ハードウェアにおける実施を多くして、ソフトウェアにおける実施を少なくすることもできるし、ハードウェアにおける実施を少なくして、ソフトウェアにおける実施を多くすることもできる。
【図面の簡単な説明】
【0029】
【図1】測位システムの一実施形態で実行されるオペレーションを示すフローチャートである。
【図2】測位システムの一実施形態を示す図である。
【図3】測位システムの一実施形態を示す図である。
【図4】測位システムの一実施形態を示す図である。
【図5】測位システムの一実施形態におけるデバイスの一般的なコンポーネントの図である。
【技術分野】
【0001】
本発明は、包括的には、測位システムに関し、より具体的には、主偏波(co-polarized)/交差偏波(cross-polarized)マッピングを用いて測位システムに対する物体の位置を求めるためのシステム及び方法に関する。
本願は、2003年7月3日に出願された係属中の米国特許出願第10/614,097号の部分継続出願である。米国特許出願第10/614,097号は、その全体が参照により本明細書に援用される。
以下の出願は、本願に関連し、参照により本明細書に援用される。
2005年4月11日に出願された「Improved Radar System for Improved Positioning」という発明の名称の米国特許出願第11/103,964号;
2005年4月11日に出願された「Positioning System with a Sparse Antenna Array」という発明の名称の米国特許出願第11/103,965号;
2005年4月11日に出願された「Positioning System with Intentional Multi-Path Signal」という発明の名称の米国特許出願第11/103,950号;
2005年4月11日に出願された「Decoherence Plate for Use in a Communications System」という発明の名称の米国特許出願第11/104,007号。
【背景技術】
【0002】
ローカル測位システムは、特に、自律走行車の用途及び精密施工ツールの用途で、ナビゲーション能力を必要とする移動デバイスを実現するために重要な存在となってきている。GPS等のグローバル測位システムは、通例、10cm程の中程度の精度の位置情報しか提供せず、水平線近くまで空の澄んだ視界を必要とする。能動コンポーネント又は受動コンポーネントのいずれかが作業範囲(ボリューム)に分散されているローカル測位システムは、はるかに高い精度の測位(たとえば、1cmより高い精度の測位)を可能にすることができ、最も複雑な閉鎖形状(enclosed geometry)であっても動作の必要があるときはユーザによるシステムの拡張を可能にする。
【0003】
従来のローカル測位システムは、アコースティック(音波)測距システム及びレーザ測距システムを含む。アコースティックシステムは、通常、トランスポンダビーコンを使用して、デバイスのネットワーク内における距離を測定する。それらのデバイスのいくつかは、固定されてローカル座標系を形成する。
あいにく、空気中の音波伝播特性のために、アコースティックシステムは、1cm以上の精度までの距離しか測定することができず、比較的短い距離間隔にわたってしか測定することができない。レーザに基づくローカル測位システムは、デバイスとプリズム等の1又は複数の反射物体との間の角度及び距離の双方の測定値を利用して、デバイスの位置を三角測量又は三辺測量(trilateralate)する。しかしながら、レーザシステムは、現在、システムコストを3万ドル以上にすることがある高価な指示メカニズム(pointing mechanism)を使用している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
2次元(2D)の位置又は3次元(3D)の位置を数ミリメートルの精度まで求めることができる比較的低コスト(たとえば、2000ドル未満)のローカル測位システムは、屋内での精密施工及び屋外での精密施工、採鉱、精密農業、並びにスタジアムフィールドの草刈り及び処置のような応用分野で大きな一組の見込みのある製品の可能性を与える。本発明は、従来のローカル測位システムのコストの限界及び制度の限界を克服することを目的とする。
【課題を解決するための手段】
【0005】
レーダマッピングのシステム及び方法は、低コストであるが、高精度のローカル測位システムを提供する。
本方法の一実施の形態では、搬送波信号周波数及び第1の偏波を有する第1の電磁パルスが送信される。第1のリターン信号が、各期間にわたって受信される。第1のリターン信号は、第1の偏波を優先的に有する。第1のリターン信号は、測位システムのレーダ検出エリア内の物体からの第1のリターンパルスを含む。第1のリターン信号は、当該第1のリターン信号から第1のリターンパルスを分離するように処理される。
【0006】
搬送波信号周波数及び第1の偏波を有する第2の電磁パルスが送信される。第2のリターン信号が、各期間にわたって受信される。第2のリターン信号は、第2の偏波を優先的に有する。第2のリターン信号は、測位システムのレーダ検出エリア内の物体からの第2のリターンパルスを含む。第2のリターン信号は、当該第2のリターン信号から第2のリターンパルスを分離するように処理される。物体の特性が、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って求められる。
【0007】
いくつかの実施の形態では、第1の偏波は右旋円偏波であり、第2の偏波は左旋円偏波である。いくつかの実施の形態では、第1の偏波は左旋円偏波であり、第2の偏波は右旋円偏波である。
本システムの一実施の形態では、デバイスは、搬送波信号周波数及び第1の偏波を有する第1の電磁パルスを送信するように構成されている。デバイスは、各期間にわたって、測位システムのレーダ検出エリア内の物体から第1のリターンパルスを含む第1のリターン信号を受信するように構成されている。第1のリターン信号は、第1の偏波を優先的に有する。デバイスは、第1のリターン信号から第1のリターンパルスを分離するように第1のリターン信号を処理するように構成されている。
【0008】
また、デバイスは、搬送波信号周波数及び第1の偏波を有する第2の電磁パルスを送信するようにも構成されている。デバイスは、各期間にわたって、物体からの第2のリターンパルスを含む第2のリターン信号を受信するように構成されている。受信される第2のリターン信号は、第2の偏波を優先的に有する。デバイスは、第2のリターン信号から第2のリターンパルスを分離するように第2のリターン信号を処理するように構成されている。デバイスは、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の特性を求めるように構成されている。
いくつかの実施の形態では、第1の偏波は右旋円偏波であり、第2の偏波は左旋円偏波である。いくつかの実施の形態では、第1の偏波は左旋円偏波であり、第2の偏波は右旋円偏波である。
【発明を実施するための最良の形態】
【0009】
以下の説明において、同様の参照符号は、図面のいくつかの図を通じて対応する部分を示している。
本発明の実施形態を詳細に説明する。実施形態の例は、添付図面に示されている。以下の詳細な説明では、本発明の徹底した理解を提供するために、多数の具体的な詳細が述べられている。しかしながら、本発明は、これらの具体的な詳細がなくても実施できることが当業者には明らかであろう。それ以外の場合には、本発明の態様を不必要に分かりにくくしないように、既知の方法、手順、コンポーネント(構成要素)、及び回路は詳細に説明されていない。
【0010】
電磁信号(時に、電磁波と呼ばれる)は、電界ベクトル成分及び磁界ベクトル成分を有する。電磁信号の偏波は、電磁信号の伝播方向に対する直交面での電磁信号の電界ベクトルの形状及び軌跡によって説明される。電磁信号の偏波には、直線偏波、楕円偏波、右旋楕円偏波、左旋楕円偏波、右旋円偏波(RHCP)、及び左旋円偏波(LHCP)が含まれ得る。
【0011】
一般に、物体からの反射又は散乱時に、電磁信号の位相の変化によって、電磁信号の偏波は変化する。散乱には、鏡面反射及び散漫散乱が含まれる。鏡面反射において偏波が変化する結果、物体のフレネル反射係数と、電磁信号が伝播する空気等の媒体のフレネル反射係数との間に差が生じる。この技術分野で知られているように、フレネル反射係数は、電磁信号の波長、電磁信号の入射角、物体及び媒体の複素屈折率、並びに、もしあれば、物体及び/又は媒体の複素屈折率の異方性の関数である。散漫散乱における偏波の変化には、物体(たとえば、木の樹皮)の表面の粗さによる複数の散乱事象及び物体(たとえば、木、その枝及び葉、又は木の葉)のボリューム(volume)全体を通じて屈折率が空間的に不均質であることによる複数の散乱事象が含まれる。
【0012】
RHCP又はLHCPを最初に有する電磁信号に対して、木等のクラッタは、主として逆の円偏波を有する反射電磁信号を返す。これとは逆に、RHCP又はLHCPを最初に有する電磁信号に対して、ほぼ垂直の2つの面を有する二面リフレクタとしても知られているコーナリフレクタでは、リターン電磁信号は、主として最初の円偏波を有する。
【0013】
いくつかのローカル測位システムは、デバイスから、既知の位置を有する1又は複数の物体までの1又は複数の距離を求めることによってデバイスの位置を求める。いくつかのローカル測位システムでは、物体はランドマークである。いくつかのローカル測位システムでは、ランドマークは受動リフレクタであり、たとえば、バイヘデラル(二面)リフレクタである。受動リフレクタを使用するローカル測位システムの課題は、受動ランドマークに対応するリターン電磁信号と、ローカル測位システムのレーダ検出エリア内の他の物体に対応するリターン電磁信号とを区別することである。加えて、自然物と受動ランドマーク等の人工物とを区別することは多くの場合困難である。
【0014】
いくつかのローカル測位システムでは、ランドマークは能動ランドマークである。能動ランドマークは、デバイスから電磁信号を受信して、リターン電磁信号を送信する。いくつかの実施形態では、リターン電磁信号は偏波を有する。リターン信号の偏波は、受信信号の偏波と同じにすることもできるし、異なるようにすることもできる。
【0015】
ランドマーク及び他の物体からの反射の際の電磁信号の偏波の変化を使用して、ランドマークからの反射と他の物体からの反射とを区別するのに役立てることができる。詳細には、各偏波を有する電磁信号を送信し、同じ各偏波(主偏波)又は直交偏波(交差偏波)を有するリターン電磁信号に対応する受信信号の相対的な信号強度又は信号電力を比較することによって、物体の特性を求めることができる。たとえば、求められる特性は、物体の粗さとすることができる。この特性によって、受動ランドマークを他の物体と区別することが可能になり、人工物を自然物と区別することが可能になる。
【0016】
たとえば、主偏波(同一偏波)信号強度に対する交差偏波(直交偏波)信号強度の比を求めることができる。この比は、滑らかな表面では非常に小さく、表面が粗くなるにつれて増加し、表面の粗さのサイズがほぼ電磁信号の波長程度である特徴を有する場合にピークとなる。同様に、この比は、物体のボリューム全体を通じて屈折率が空間的に不均質であることにより複数の散乱事象が生じる場合も高くなる。一方、滑らかな受動バイヘデラルリフレクタの場合、この比は小さい。
【0017】
図2は、ローカル測位システム200の一実施形態を示している。いくつかの実施形態では、システム200のレーダ検出エリアは、最大寸法として50m、100m、250m、500m、1000m、5000m、又は10000mを有することができる。デバイス210は、搬送波信号周波数及び第1の偏波214を有する1又は複数の電磁パルス212を送信する。第1の偏波214は、この例示ではLHCPである。他の実施形態では、第1の偏波214はRHCPである。一実施形態では、電磁パルス212は、継続時間が1ナノ秒(ns)であり、6ギガヘルツ(GHz)の搬送波信号周波数を有する。他の実施形態は、電磁パルス212の継続時間及び搬送波信号周波数の組み合わせとして、1ns及び24GHz、5ns及び6GHz、並びに1ns及び77GHzの組み合わせを使用することができる。他の多くのパルス継続時間及び搬送波信号周波数をさらに他の実施形態で使用することができる。
【0018】
電磁パルス212は、システム200のレーダ検出エリア内の物体によって反射される。物体には、受動リフレクタ216、木の葉222、及び建物224が含まれる。図2は、1つのデバイス210及び1つの受動リフレクタ216を有する一実施形態を示しているが、いくつかの実施形態は、2つ以上のデバイス、2つ以上の受動リフレクタ、又はその双方を有することができる。いくつかの実施形態では、受動リフレクタ216は、受動バイヘデラルリフレクタ又は受動コーナキューブリフレクタである。デバイス210は、或る期間にわたって1又は複数のリターンパルスを含む1又は複数のリターン信号218を受信する。リターン信号218−1又は218−2等の(特定の物体が最初のパルス(複数可)を反射することによって生成された)各リターン信号の偏波220は、第1の偏波214とほぼ同じであるか、又は、第1の偏波214に対してほぼ直交している第2の偏波を有する。いくつかの実施形態では、第1の偏波214はRHCPであり、偏波220はLHCP又はRHCPのいずれかである。いくつかの実施形態では、第1の偏波214はLHCPであり、偏波220はLHCP又はRHCPのいずれかである。主偏波されたリターン信号218及び交差偏波されたリターン信号218の相対的な信号強度又は信号電力を比較することによって、物体の粗さ等の物体の特性を求めることができる。これによって、滑らかな表面を有する受動リフレクタ216を、木の葉222及び建物224と区別することが可能になる。
【0019】
詳細には、特定の領域(たとえば、デバイス210の近傍又は周囲)のレーダマップを生成するために、デバイス210は、搬送波信号周波数及び偏波214等の第1の偏波を有するパルス212−1等の少なくとも第1のパルスを送信する。デバイスは、偏波220等の第1の偏波を優先的に有するリターン信号218−1等の第1のリターン信号を受信する。第1のリターン信号は、少なくとも第1のリターンパルスを含む。デバイス210は、第1のリターン信号から第1のリターンパルスを分離するように第1のリターン信号を処理する。また、デバイスは、搬送波信号周波数及び第1の偏波を有するパルス212−2等の少なくとも第2のパルスも送信する。図2における送信パルス212及びリターン信号218の矢印は、例示のためのものにすぎず、必ずしも、パルス及びリターン信号が特定の指向性を有することを示すものではないことに留意されたい。いくつかの実施形態では、送信パルスは等方的であり、他の実施形態では、送信パルスは方向が絞られている。
【0020】
デバイスは、偏波220等の第2の偏波を優先的に有するリターン信号218−2等の第2のリターン信号を受信する。第2の偏波は、第1の偏波に対してほぼ直交している。第2のリターン信号は、少なくとも第2のリターンパルスを含む。デバイス210は、第2のリターン信号から第2のリターンパルスを分離するように第2のリターン信号を処理する。デバイス210は、第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の1又は複数の特性を求める。いくつかの実施形態では、この特性は、物体の少なくとも1つの表面の粗さである。例示的な一実施形態では、第1の偏波はRHCPであり、第2の偏波はLHCPである。別の例示的な実施形態では、第1の偏波はLHCPであり、第2の偏波はRHCPである。さらに別の実施形態では、双方の偏波を有するリターン信号が、送信パルスに応答してほぼ同時に受信される。
【0021】
ローカル測位システム200の一変形では、物体は、少なくとも1つのオプションの能動ランドマーク226を含むことができる。能動ランドマーク226は、搬送波信号周波数を有する電磁パルス226を返す。リターン電磁パルスの偏波220は、第1の偏波214とほぼ同じであるか、又は、第1の偏波214に対してほぼ直交している第2の偏波を有する。いくつかの実施形態では、リターン電磁パルスの偏波228は、搬送波信号周波数と異なる第2の搬送波信号周波数を有する。いくつかの実施形態では、リターン電磁パルス226は、振幅変調又は周波数変調されている。いくつかの実施形態では、リターン電磁パルス226は方形波である。いくつかの実施形態では、リターン電磁パルス226は符号化されている。たとえば、リターン電磁パルスは、オンオフキーイング、直交振幅変調、連続位相周波数シフトキーイング、周波数シフトキーイング、位相シフトキーイング、差動位相シフトキーイング、直交位相シフトキーイング、最小っシフトキーイング、ガウス型最小シフトキーイング、パルス位置変調、パルス振幅変調、パルス幅変調、ウォルシュ符号変調、ゴールド符号変調、バーカー符号変調、擬似ランダム雑音列変調、又は、ゼロ時間オフセットで1の自己相関を有し、非ゼロ時間オフセットでほぼ0に近い自己相関を有するDCフリー符号を使用して符号化することができる。能動ランドマーク226を使用することによって、ローカル測位システム200においてデバイス210からより大きな間隔の場所においてリターン電磁パルス228を区別することが可能になる。
【0022】
図1は、主偏波/交差偏波レーダマッピング(co-polarized and cross-polarized radar mapping)を用いる測位システムにおけるオペレーションの一実施形態を示すフローチャートである。第1の偏波を有する第1のパルスが送信される(ステップ112)。少なくとも第1のリターンパルスを含む第1のリターン信号が受信される(ステップ114)。第1のリターン信号は、第1のリターンパルスを分離するように処理される(ステップ116)。第1の偏波を有する第2のパルスが送信される(ステップ118)。少なくとも第2のリターンパルスを含む第2のリターン信号が受信される(ステップ120)。第2のリターン信号は、第2のリターンパルスを分離するように処理される(ステップ122)。第1のリターンパルス及び第2のリターンパルスの相対的な信号強度に従って物体の特性が求められる(ステップ124)。
【0023】
図3は、測位システムの一実施形態300の図である。デバイス310は、複数の送信機312及び1つの受信機320を備える。デバイス310は、少なくとも第1の組のパルス314を送信する。パルス314は、物体316から散乱反射される。デバイス310は、リターン信号318を受信する。
【0024】
図4は、測位システムの一実施形態400の図である。デバイス410は、1つの送信機412及び複数の受信機420を備える。デバイス410は、少なくとも第1のパルス414を送信する。パルス414は、物体416から散乱反射される。デバイス410は、一組のリターン信号418を受信する。
【0025】
図5は、測位システムの一実施形態におけるデバイス210、デバイス310、デバイス410等の一般的なデバイス510の構成要素(コンポーネント)の図である。デバイス510の1又は複数の送信機及び1又は複数の受信機は示されていない。デバイスは、少なくとも1つのアンテナ508を備える。いくつかの実施形態では、デバイス510は、少なくとも1つの円偏波アンテナを備えることができる。いくつかの実施形態では、デバイス510は、送信及び受信に使用される少なくとも1つの偏波アンテナを備えることができる。一実施形態では、デバイス510は、2つのアンテナを備え、1つはRHCP信号の送受信用であり、もう1つはLHCP信号の送受信用である。
【0026】
デバイス510は、フロントエンド回路512及び1又は複数の信号を変更するための信号プロセッサ514を備える。この変更は、変調符号の増幅、フィルタリング、及び/又は除去を含むことができる。デバイス510は、1又は複数の処理ユニット(CPU)516、メモリ520、及びこれらのコンポーネントを接続するための1又は複数の通信バス518を備える。代替的な実施形態では、デバイス510の機能の一部又は全部を、1又は複数の特定用途向け集積回路(ASIC)で実施することができ、それによって、処理ユニット516の必要性をなくすことができるか、又は処理ユニット516の役割を削減することができる。メモリ520は、高速ランダムアクセスメモリを含むことができ、また、1又は複数の磁気ディスクストレージデバイス等の不揮発性メモリも含むことができる。メモリ520は、処理ユニット520から遠隔に配置された大容量記憶装置を含むことができる。
【0027】
メモリ520は、ハードウェア依存タスクを実行するためのさまざまな基本システムサービスをハンドリングするプロシージャを含んだオペレーティングシステム522を記憶する。また、メモリ520は、1又は複数のプログラムモジュール524も記憶する。プログラムモジュール524は、リターン信号から1又は複数のパルスを分離するパルス分離モジュール又は一組の命令526を含む。また、プログラムモジュール524は、主偏波リターン信号及び交差偏波リターン信号の相対的な信号強度に従って物体の特性を求める物体特性決定モジュールすなわち一組のインストラクション(命令)528も含む。
【0028】
メモリ520のモジュールすなわち一組のインストラクションは、処理ユニット516によって実行される。加えて、デバイス510は、実行可能プロシージャ、サブモジュール、テーブル、及び他のデータ構造体(図示せず)を含むことができる。いくつかの実施形態では、追加のモジュール及びデータ構造体、又は、異なるモジュール及びデータ構造体を使用することができ、上記に列挙したモジュール及び/又はデータ構造体のいくつかは、使用されない場合がある。いくつかの実施形態では、当該技術分野で知られているように、デバイス510の能力は、ハードウェアにおける実施を多くして、ソフトウェアにおける実施を少なくすることもできるし、ハードウェアにおける実施を少なくして、ソフトウェアにおける実施を多くすることもできる。
【図面の簡単な説明】
【0029】
【図1】測位システムの一実施形態で実行されるオペレーションを示すフローチャートである。
【図2】測位システムの一実施形態を示す図である。
【図3】測位システムの一実施形態を示す図である。
【図4】測位システムの一実施形態を示す図である。
【図5】測位システムの一実施形態におけるデバイスの一般的なコンポーネントの図である。
【特許請求の範囲】
【請求項1】
ローカル測位システムのレーダマッピングの方法であって、
搬送波信号周波数及び第1の偏波を有する少なくとも第1の電磁パルスをデバイスから送信する第1送信ステップと、
各それぞれの間にわたって第1のリターン信号を受信するステップであって、該第1のリターン信号は、前記測位システムのレーダ検出エリア内の物体からの少なくとも第1のリターンパルスを含み、前記第1の偏波を有する信号を優先的に受信する、第1受信ステップと、
前記第1のリターン信号から前記第1のリターンパルスを分離するように該第1のリターン信号を処理する第1処理ステップと、
前記搬送波信号周波数及び前記第1の偏波を有する第2の電磁パルスを前記デバイスから送信する第2送信ステップと、
各期間にわたって第2のリターン信号を受信するステップであって、該第2のリターン信号は、前記測位システムの前記レーダ検出エリア内の前記物体からの第2のリターンパルスを含み、第2の偏波を有する信号を優先的に受信する、第2受信ステップと、
前記第2のリターン信号から前記第2のリターンパルスを分離するように該第2のリターン信号を処理する第2処理ステップと、
前記第1のリターンパルス及び前記第2のリターンパルスの相対的な信号強度に従って前記物体の特性を求めるステップと
からなることを特徴とする方法。
【請求項2】
請求項1記載の方法において、前記第1の偏波は右旋円偏波であり、前記第2の偏波は左旋円偏波であることを特徴とする方法。
【請求項3】
請求項1記載の方法において、前記第1の偏波は左旋円偏波であり、前記第2の偏波は右旋円偏波であることを特徴とする方法。
【請求項4】
請求項1記載の方法において、前記送信ステップ及び前記受信ステップの双方に同じ偏波アンテナを使用することをさらに含むことを特徴とする方法。
【請求項5】
請求項1記載の方法において、前記デバイスからの送信ステップでは1つの送信機を使用し、前記デバイスでの受信ステップでは複数の受信機を使用することを特徴とする方法。
【請求項6】
請求項1記載の方法において、前記デバイスからの送信ステップでは複数の送信機を使用し、前記デバイスでの受信ステップでは1つの受信機を使用することを特徴とする方法。
【請求項7】
請求項1記載の方法において、前記物体は能動ランドマークであることを特徴とするグの方法。
【請求項8】
請求項1記載の方法において、前記物体は受動リフレクタであることを特徴とする方法。
【請求項9】
請求項1記載の方法において、前記物体の前記特性は、該物体の少なくとも1つの表面の粗さであることを特徴とする方法。
【請求項10】
ローカル測位システムであって、
搬送波信号周波数及び第1の偏波を有する少なくとも第1の電磁パルスを送信し、各期間にわたって、該測位システムのレーダ検出エリア内に位置する物体から少なくとも第1のリターンパルスを含む第1のリターン信号を受信し、該第1のリターン信号から該第1のリターンパルスを分離するように該第1のリターン信号を処理し、前記搬送波信号周波数及び前記第1の偏波を有する少なくとも第2の電磁パルスを送信し、各期間にわたって、前記物体からの第2のリターンパルスを含む第2のリターン信号を受信し、該第2のリターン信号から該第2のリターンパルスを分離するように該第2のリターン信号を処理し、前記第1のリターンパルス及び前記第2のリターンパルスの相対的な信号強度に基づいて前記物体の特性を求めるように構成されている、デバイス
を備え、
前記デバイスは、前記第1の偏波を有する前記第1のリターン信号及び第2の偏波を有する前記第2のリターン信号を優先的に受信するよう構成されている
ことを特徴とする測位システム。
【請求項11】
請求項10記載の測位システムにおいて、前記第1の偏波は右旋円偏波であり、前記第2の偏波は左旋円偏波であることを特徴とする測位システム。
【請求項12】
請求項10記載の測位システムにおいて、前記第1の偏波は左旋円偏波であり、前記第2の偏波は右旋円偏波であることを特徴とする測位システム。
【請求項13】
請求項10記載の測位システムにおいて、前記物体は能動ランドマークであることを特徴とする測位システム。
【請求項14】
請求項10記載の測位システムにおいて、前記物体は受動リフレクタであることを特徴とする測位システム。
【請求項15】
請求項14記載の測位システムにおいて、前記受動リフレクタは、ダイヘデラル(二面体)及びコーナキューブから成る群から選択されることを特徴とする測位システム。
【請求項16】
請求項10記載の測位システムにおいて、前記デバイスはさらに、少なくとも1つの円偏波アンテナを備えることを特徴とする測位システム。
【請求項17】
請求項10記載の測位システムにおいて、前記デバイスはさらに、少なくとも1つの偏波アンテナを備え、該デバイスは、該偏波アンテナを使用して送信及び受信を行うことを特徴とする測位システム。
【請求項18】
請求項10記載の測位システムにおいて、前記デバイスは、1つの送信機及び複数の受信機をさらに備え、該デバイスは、前記1つの送信機を使用して送信を行い、前記複数の受信機を使用して受信を行うことを特徴とする測位システム。
【請求項19】
請求項10記載の測位システムにおいて、前記デバイスはさらに、複数の送信機及び1つの受信機を備え、該デバイスは、該複数の送信機を使用して送信を行い、該1つの受信機を使用して受信を行うことを特徴とする測位システム。
【請求項20】
請求項10記載の測位システムにおいて、前記デバイスはさらにプロセッサを備え、該プロセッサは、前記第1のリターンパルスを分離するように前記第1のリターン信号を処理し、前記第2のリターンパルスを分離するように前記第2のリターン信号を処理し、該第1のリターンパルス及び該第2のリターンパルスの前記相対的な信号強度に基づいて、前記物体の前記特性を求めることを特徴とする測位システム。
【請求項21】
請求項10記載の測位システムにおいて、前記デバイスは、プロセッサ、メモリ、及び少なくとも1つのプログラムモジュールをさらに備え、該少なくとも1つのプログラムモジュールは、
前記第1のリターン信号から前記第1のリターンパルスを分離するためのインストラクションと、
前記第2のリターン信号から前記第2のリターンパルスを分離するためのインストラクションと、
前記第1のリターンパルス及び前記第2のリターンパルスの前記相対的な信号強度に従って前記物体の前記特性を求めるためのインストラクションと
を含むことを特徴とする測位システム。
【請求項22】
請求項10記載の測位システムにおいて、前記物体の前記特性は、該物体の少なくとも1つの表面の粗さであることを特徴とする測位システム。
【請求項1】
ローカル測位システムのレーダマッピングの方法であって、
搬送波信号周波数及び第1の偏波を有する少なくとも第1の電磁パルスをデバイスから送信する第1送信ステップと、
各それぞれの間にわたって第1のリターン信号を受信するステップであって、該第1のリターン信号は、前記測位システムのレーダ検出エリア内の物体からの少なくとも第1のリターンパルスを含み、前記第1の偏波を有する信号を優先的に受信する、第1受信ステップと、
前記第1のリターン信号から前記第1のリターンパルスを分離するように該第1のリターン信号を処理する第1処理ステップと、
前記搬送波信号周波数及び前記第1の偏波を有する第2の電磁パルスを前記デバイスから送信する第2送信ステップと、
各期間にわたって第2のリターン信号を受信するステップであって、該第2のリターン信号は、前記測位システムの前記レーダ検出エリア内の前記物体からの第2のリターンパルスを含み、第2の偏波を有する信号を優先的に受信する、第2受信ステップと、
前記第2のリターン信号から前記第2のリターンパルスを分離するように該第2のリターン信号を処理する第2処理ステップと、
前記第1のリターンパルス及び前記第2のリターンパルスの相対的な信号強度に従って前記物体の特性を求めるステップと
からなることを特徴とする方法。
【請求項2】
請求項1記載の方法において、前記第1の偏波は右旋円偏波であり、前記第2の偏波は左旋円偏波であることを特徴とする方法。
【請求項3】
請求項1記載の方法において、前記第1の偏波は左旋円偏波であり、前記第2の偏波は右旋円偏波であることを特徴とする方法。
【請求項4】
請求項1記載の方法において、前記送信ステップ及び前記受信ステップの双方に同じ偏波アンテナを使用することをさらに含むことを特徴とする方法。
【請求項5】
請求項1記載の方法において、前記デバイスからの送信ステップでは1つの送信機を使用し、前記デバイスでの受信ステップでは複数の受信機を使用することを特徴とする方法。
【請求項6】
請求項1記載の方法において、前記デバイスからの送信ステップでは複数の送信機を使用し、前記デバイスでの受信ステップでは1つの受信機を使用することを特徴とする方法。
【請求項7】
請求項1記載の方法において、前記物体は能動ランドマークであることを特徴とするグの方法。
【請求項8】
請求項1記載の方法において、前記物体は受動リフレクタであることを特徴とする方法。
【請求項9】
請求項1記載の方法において、前記物体の前記特性は、該物体の少なくとも1つの表面の粗さであることを特徴とする方法。
【請求項10】
ローカル測位システムであって、
搬送波信号周波数及び第1の偏波を有する少なくとも第1の電磁パルスを送信し、各期間にわたって、該測位システムのレーダ検出エリア内に位置する物体から少なくとも第1のリターンパルスを含む第1のリターン信号を受信し、該第1のリターン信号から該第1のリターンパルスを分離するように該第1のリターン信号を処理し、前記搬送波信号周波数及び前記第1の偏波を有する少なくとも第2の電磁パルスを送信し、各期間にわたって、前記物体からの第2のリターンパルスを含む第2のリターン信号を受信し、該第2のリターン信号から該第2のリターンパルスを分離するように該第2のリターン信号を処理し、前記第1のリターンパルス及び前記第2のリターンパルスの相対的な信号強度に基づいて前記物体の特性を求めるように構成されている、デバイス
を備え、
前記デバイスは、前記第1の偏波を有する前記第1のリターン信号及び第2の偏波を有する前記第2のリターン信号を優先的に受信するよう構成されている
ことを特徴とする測位システム。
【請求項11】
請求項10記載の測位システムにおいて、前記第1の偏波は右旋円偏波であり、前記第2の偏波は左旋円偏波であることを特徴とする測位システム。
【請求項12】
請求項10記載の測位システムにおいて、前記第1の偏波は左旋円偏波であり、前記第2の偏波は右旋円偏波であることを特徴とする測位システム。
【請求項13】
請求項10記載の測位システムにおいて、前記物体は能動ランドマークであることを特徴とする測位システム。
【請求項14】
請求項10記載の測位システムにおいて、前記物体は受動リフレクタであることを特徴とする測位システム。
【請求項15】
請求項14記載の測位システムにおいて、前記受動リフレクタは、ダイヘデラル(二面体)及びコーナキューブから成る群から選択されることを特徴とする測位システム。
【請求項16】
請求項10記載の測位システムにおいて、前記デバイスはさらに、少なくとも1つの円偏波アンテナを備えることを特徴とする測位システム。
【請求項17】
請求項10記載の測位システムにおいて、前記デバイスはさらに、少なくとも1つの偏波アンテナを備え、該デバイスは、該偏波アンテナを使用して送信及び受信を行うことを特徴とする測位システム。
【請求項18】
請求項10記載の測位システムにおいて、前記デバイスは、1つの送信機及び複数の受信機をさらに備え、該デバイスは、前記1つの送信機を使用して送信を行い、前記複数の受信機を使用して受信を行うことを特徴とする測位システム。
【請求項19】
請求項10記載の測位システムにおいて、前記デバイスはさらに、複数の送信機及び1つの受信機を備え、該デバイスは、該複数の送信機を使用して送信を行い、該1つの受信機を使用して受信を行うことを特徴とする測位システム。
【請求項20】
請求項10記載の測位システムにおいて、前記デバイスはさらにプロセッサを備え、該プロセッサは、前記第1のリターンパルスを分離するように前記第1のリターン信号を処理し、前記第2のリターンパルスを分離するように前記第2のリターン信号を処理し、該第1のリターンパルス及び該第2のリターンパルスの前記相対的な信号強度に基づいて、前記物体の前記特性を求めることを特徴とする測位システム。
【請求項21】
請求項10記載の測位システムにおいて、前記デバイスは、プロセッサ、メモリ、及び少なくとも1つのプログラムモジュールをさらに備え、該少なくとも1つのプログラムモジュールは、
前記第1のリターン信号から前記第1のリターンパルスを分離するためのインストラクションと、
前記第2のリターン信号から前記第2のリターンパルスを分離するためのインストラクションと、
前記第1のリターンパルス及び前記第2のリターンパルスの前記相対的な信号強度に従って前記物体の前記特性を求めるためのインストラクションと
を含むことを特徴とする測位システム。
【請求項22】
請求項10記載の測位システムにおいて、前記物体の前記特性は、該物体の少なくとも1つの表面の粗さであることを特徴とする測位システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2008−536119(P2008−536119A)
【公表日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願番号】特願2008−505332(P2008−505332)
【出願日】平成18年3月14日(2006.3.14)
【国際出願番号】PCT/US2006/009833
【国際公開番号】WO2006/110261
【国際公開日】平成18年10月19日(2006.10.19)
【出願人】(504278123)ナヴコム テクノロジー インコーポレイテッド (28)
【Fターム(参考)】
【公表日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【国際出願番号】PCT/US2006/009833
【国際公開番号】WO2006/110261
【国際公開日】平成18年10月19日(2006.10.19)
【出願人】(504278123)ナヴコム テクノロジー インコーポレイテッド (28)
【Fターム(参考)】
[ Back to top ]