
乗り物用ハイブリッド駆動装置の過渡状態制御方法
【課題】熱エンジンの排出を最小にするトルク軌跡が定められている乗り物用のハイブリッド駆動装置を制御する方法を提供する。
【解決手段】少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、ディーゼルエンジンの静的トルク設定点が求められており、ディーゼルエンジンの排出物をディーゼルエンジンのトルクの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、動的NOx排出設定点をNOx排出モデルとディーゼルエンジンの静的トルク設定点から計算し、ディーゼルエンジンの動的トルク設定点を動的NOx排出設定点から導き出し、電気機械の動的トルク設定点をディーゼルエンジンの動的トルク設定点の関数として求め、その両方の動的トルク設定点を駆動装置に適用する方法。
【解決手段】少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、ディーゼルエンジンの静的トルク設定点が求められており、ディーゼルエンジンの排出物をディーゼルエンジンのトルクの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、動的NOx排出設定点をNOx排出モデルとディーゼルエンジンの静的トルク設定点から計算し、ディーゼルエンジンの動的トルク設定点を動的NOx排出設定点から導き出し、電気機械の動的トルク設定点をディーゼルエンジンの動的トルク設定点の関数として求め、その両方の動的トルク設定点を駆動装置に適用する方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン制御の分野に関し、特に、排出物を減らすための乗り物用ハイブリッド駆動装置の過渡状態制御に関する。
【0002】
ハイブリッド乗り物は、乗り物の駆動するために、少なくとも1つの電気機械と少なくとも1つの熱エンジンとを有している乗り物である。
【背景技術】
【0003】
ある定常動作点から他の定常動作点への変化によって発生される過渡状態における内燃エンジンからの排出物に考慮することは、非常に重要な課題である。実際、現在のエンジンからの排出物は、動作の逸脱に対して非常に敏感である。さらに、将来承認されるドライブサイクルには、より多くの過渡規制が課されることになる。ディーゼルエンジンを備えているハイブリッド乗り物の場合、問題は2つの側面があり、一方では、定常状態動作点において、NOx排出物(窒素酸化物:熱エンジンによって排出される汚染物質)と燃料消費との間で妥協を図らなくてはならず、他方では、NOx排出のピークが観測されるエンジンの過渡動作規制を管理しなければならない。
【0004】
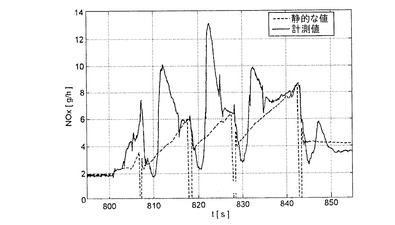
図1aから1dは、過渡状態における排出物問題の一例を示している。この例は、排気ガス再循環装置(EGR)を備えているハイブリッド駆動装置に対するNEDC(新ヨーロッパドライビングサイクル:ヨーロッパの道路で遭遇する条件を再現可能に模倣することを意図した自動車のドライブサイクルであり、乗り物の消費と排出物とを計測するために主に使用される)形式のドライビングサイクルにおける、都市外部型の第1の加速度を示している。ギア比の変化過程では、噴射カットオフが必然的に排気部分での燃料濃度を減少させることになる。このため、加速中に噴射が回復した場合、吸気部分で利用できる燃焼気体が制限される。この場合、吸気部分における燃焼気体分率は設定点に即座に収束することができない。その応答時間は、EGR回路内の燃焼気体搬送時間に依存する。このような過渡過程では、吸気部分における気体の組成は、したがって、シリンダにおける気体の組成も、その設定点に収束せず、NOx排出物量が静的状態の排出物量を超えてしまう。これらの排出のピークの大きさは、定常状態の元で予想されるレベルと比較して高い。これらのピークは、ドライビングサイクルの種類に応じて異なるが、排出物の累積値内の少なくない部分を占めている。
【0005】
ヨーロッパドライビングサイクル(NEDC)全体では、過渡部分でのNOx排出物は、全NOx排出物の15%を超えない。一方、FTP(連邦試験手順:排出物の計測に合衆国で使用されるドライブサイクル)形式のドライビングサイクルについては、表1に示されたように、過渡部分でのNOx排出物は、全排出物の40%を超えている。なお、表1は、2つのドライビングサイクル(NEDCとFTP)のそれぞれに対して計測されたNOx排出物と疑似静的NOx排出物との比較と、各サイクルについての全排出物中の過渡部分における排出物の割合とを示している。
【0006】
【表1】

【0007】
したがって、過渡部分の排出物を考慮することは、エンジン制御に関する重要な問題である。このような文脈において、熱エンジンのハイブリッド化は、問題解決に対する高い潜在性を有している。その着想は、熱エンジンのトルク設定点を補償する電気機械またはオルタネータスタータを使用することで、過渡条件下において、熱エンジンストレスを制限することである。
【0008】
エネルギースーパバイザは、このようなハイブリッド駆動装置を制御ために開発されてきた。これには、最適な制御に基づいた幾つかの方法がある。この種類のエネルギースーパバイザは、非特許文献1〜3に記載されている。
【0009】
しかし、これらのエネルギースーパバイザは、ハイブリッド駆動装置の静的状態の管理には向いているが、過渡状態の管理には適していない。
【0010】
熱エンジンは、一般的に、純粋な疑似静的装置であると仮定されている。しかしながら、この仮定は、エンジントルクを考慮する場合には容認されるが、排出物を考慮する場合には誤っている。したがって、全排出物に対する、過渡動作過程中に発生する排出物の量は、少なくない。このため、静的スーパバイザによって選択されている2つの定常点間の過渡を考慮することが必要である。
【0011】
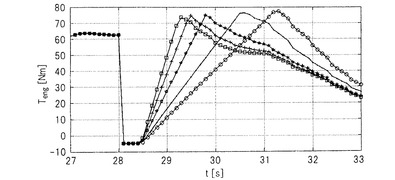
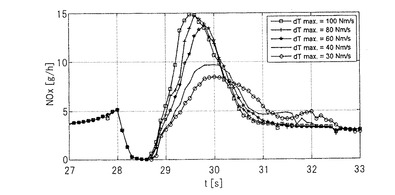
図2aおよび2bは、NOx排出物に対するトルク勾配の影響を示している。エンジンの過渡動作過程を管理するために、失われたトルクを与えて車輪の設定点を合わせる電気機械を使用して、熱エンジンから要求されるトルク勾配の値を制限することを意図した経験的な方法が開発されてきている。この種類の経験的方法は非特許文献4および5に記載されている。
【先行技術文献】
【非特許文献】
【0012】
【非特許文献1】A.Sciarrettoa、M.Back、およびL.Guzzella、「Optimal control of parallel hybrid electric vehicles(パラレルハイブリッド電気乗り物の最適制御)」,IEEE Transactions on Control Systems Technology、vol.2、no.3、2004年5月
【非特許文献2】A.Chasse、A.Sciarrett、およびJ.Chouvin、「Online optimal control of a parallel hybrid with costate adaption rule(共状態適応規則によるパラレルハイブリッドのオンライン最適制御)」、Proceedings of the IFAC Symposium on Advances in Automotive Control、ドイツ、ミュンヘン、2010年7月12〜14日
【非特許文献3】O.Grondin、L.Thiboult、Ph.Moulin、A.Chasse、およびA.Sciorretta、「Energy Management Strategy for Diesel Hybrid Electric Vehicle(ディーゼルハイブリッド電気乗り物のエネルギー管理戦略)」、Proceedings of the 7th IEEE vehicle Power and Propulsion Conference、合衆国、シカゴ、2011年9月6〜9日
【非特許文献4】N.Lindenkomp、C.−P.Stober−Schmidt、およびP.Eilts、「Strategies for Reducing NOx and Particulate Matter Emissions in Diesel Hybrid Electric vehicles(ディーゼルハイブリッド電気乗り物においてNOxと粒子状物質排出物を減少させる戦略)」、SAE Paper n°2009−01−1305、2009
【非特許文献5】O.Predelli、F.Bunar、J.Manns、R.BuchwaldおよびA.Sommer、「Laying Out Diesel−Engine Control Systems in Passenger−Car Hybrid Drives(乗用車ハイブリッド駆動におけるディーゼルエンジン制御装置のレイアウト)」、Proceedings of the IAV conference on Hybrid Vehicle and Energy Management、131〜151ページ、2007年2月14〜15日
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、この種類の経験的な戦略では、最適な軌跡を見出すことはできず、勾配の調整は、エンジンと、その較正、そして駆動モデルに依存する。実際、これらの勾配の複数の制限事項は、サイクルごとに較正しなければならない。
【0014】
本発明の目的は、熱エンジンの排出物を最小にするトルク軌跡が定められている乗り物用のハイブリッド駆動装置を制御する方法を提供することである。本方法は、過渡動作過程中に、電気機械のトルク設定点と熱エンジンのトルク設定点との間の分配を修正するものである。その原理は、熱エンジンのトルク設定点の動力学を制限することにある。電気機械は、車輪の要求を満たすようにトルク補償を実現する。そのため、本発明によれば、ハイブリッド駆動装置のディーゼルエンジンのNOx排出物がモデル化され、このモデルはハイブリッド駆動装置の構成要素の複数のトルク設定点を定めるように使用される。
【0015】
このモデルの利点は、トルク軌跡の計算において、排出物の生成を左右する物理現象が考慮されることにある。また、関連する複数の物理現象を考慮した複数のモデルを使用することにより、本方法の実装が確実になり、1つの調整パラメータの較正で良くなるため、その調整が簡単になる。さらに、本制御方法によって、ハイブリッド化に伴う燃料消費の利点を維持しながら、過渡部分におけるNOx排出物を減少させることができる。そのうえ、本発明の方法は、従来の(静的な)戦略を補い、ハイブリッド乗り物の管理における静的および過渡的な目的を分離することができる。
【課題を解決するための手段】
【0016】
本発明は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、前記ディーゼルエンジンの静的トルク設定点Tspeng,sが求められており、
前記ディーゼルエンジンの排出物を前記ディーゼルエンジンのトルクTengの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、
動的NOx排出設定点NOspxを前記NOx排出モデルと前記ディーゼルエンジンの前記静的トルク設定点Tspeng、sから計算し、
前記ディーゼルエンジンの動的トルク設定点Tspengを前記動的NOx排出設定点NOspxから導き出し、
前記電気機械の動的トルク設定点Tspmotを前記ディーゼルエンジンの前記動的トルク設定点Tspengの関数として求め、
その両方の前記動的トルク設定点を前記駆動装置に適用する、
ことを特徴とする方法に関する。
【0017】
一実施態様において、前記窒素酸化物排出モデルはディーゼルエンジン回転数とエンジンシリンダ内の最高温度とに依存している。
【0018】
前記ディーゼルエンジンは、燃焼気体を前記ディーゼルエンジンのシリンダの上流の吸気マニフォールドに導く排気ガス再循環装置を備えており、前記NOx排出モデルは前記ディーゼルエンジンの前記吸気マニフォールド内の燃焼気体分率Fest1に依存していることが有利である。
【0019】
好ましくは、NOx排出物は以下の公式によってモデル化される。
【0020】
【数1】
【0021】
ここで、
α1からα7:NOxモデルの較正係数、
Ne:ディーゼルエンジン回転数、
【0022】
【数2】
【0023】
F1:ディーゼルエンジンに排気ガス再循環回路が備わっている場合における、吸気マニフォールド内の燃焼気体分率、(他の場合には、この値はゼロ)
NOx:NOx排出物レベルである。
【0024】
一実施態様において、NOx排出閾値がディーゼルエンジンに対して定義され、NOx排出設定点NOspxは閾値の関数として計算される。
【0025】
その代わりに、NOx排出削減因子ξを設定可能で、NOx排出設定点NOspxは削減因子ξの関数として計算される。
【0026】
さらに、ディーゼルエンジンの動的トルク設定点の導き出された値は、NOx排出モデルを逆転することによって求められる。
【0027】
前記ディーゼルエンジンの静的トルク設定点Tspeng,sは、エネルギースーパバイザ、特にハイブリッド駆動装置に備わっている疑似静的エネルギースーパバイザによって駆動装置トルク設定点Tsppwtから求められることが好ましい。
【0028】
また、本発明は、上記の方法をコンピュータに実行させるためのプログラムにも関する。プログラムは、通信ネットワークからダウンロード可能でもよいし、コンピュータが読み取り可能な媒体に記録されていてもよいし、コントローラが実行可能な媒体に記録されてもよい。また、このプログラムは、プログラムがコントローラ上で実行されるときに、上記の方法を実装する複数のプログラムコード命令を有している。
【0029】
さらに本発明は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置にさらに関する。駆動装置は、前述の制御方法によって制御される。過渡状態における駆動装置の制御は、疑似静的エネルギースーパバイザに対して縦続して行うことができる。
【0030】
また、本発明は、本発明のハイブリッド駆動装置を有していることを特徴とする乗り物、特に自動車にも関する。
【0031】
本発明の方法のその他の特徴と利点とは、添付の図面を参照して、非限定的な例により説明する実施形態の以降の説明を読むことで明らかになろう。
【発明の効果】
【0032】
本発明によれば、ハイブリッド駆動装置における熱エンジンの過渡排出物を、それらの発生に関わる複数の物理的現象を考慮することによって、減少させることができる。
【図面の簡単な説明】
【0033】
【図1a】乗り物の速度に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1b】吸気マニフォールド内の燃焼気体分率に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1c】エンジン回転数に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1d】NOx排出物に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図2a】過渡状態でのエンジントルク勾配(dT)のNOx排出物に対する影響を示す図である。
【図2b】過渡状態でのエンジントルク勾配(dT)のNOx排出物に対する影響を示す図である。
【図3】熱エンジントルクと窒素酸化物排出の動的設定点を示す図である。
【図4】動的戦略の流れ図である。
【図5a】熱エンジンのトルク設定点軌跡の計算の流れ図であって、NOx排出モデルを示す流れ図である。
【図5b】熱エンジンのトルク設定点軌跡の計算の流れ図であって、具体的な実施形態を示す流れ図である。
【図6】NOx設定点の計算の原理を示す図である。
【図7】シリンダの最高温度マップを示す図である。
【図8a】熱エンジントルクに関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8b】電気モータトルクに関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8c】燃焼気体分率に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8d】シリンダ温度に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8e】NOx排出物に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8f】NOx排出物に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図9】様々な減少因子についてのNOx排出物の関数としての燃料消費の進展を示す図である。
【図10】削減因子の関数としてのFTPサイクル内の過渡NOx排出物の部分を示す図である。
【発明を実施するための形態】
【0034】
以下で説明する本実施形態の方法によって、ハイブリッド駆動装置のNOx排出物を減少させることができる。また、NOx排出物を予測できるNOx排出モデルを使用して2つの静的な動作点の間の複数の過渡過程を管理することができる。このモデルによって、内燃エンジンのトルクの関数として、ハイブリッド駆動装置のNOx排出物を求めることができる。
【0035】
本方法は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンとからなる乗り物(特に自動車)のハイブリッド駆動装置の制御を可能にする。過渡状態について、以下の段階が実施される:
熱エンジンの静的トルク設定点Tspeng,sを得て、
ディーゼルエンジンのNOx排出物をディーゼルエンジンのトルクTengの関数として予測できるNOx排出モデルを構成し、
動的NOx排出設定点NOspxをNOx排出モデルから計算し、ディーゼルエンジンのNOx排出物をトルク設定点Tspeng,sの関数として求め、
ディーゼルエンジンの動的トルク設定点Tspengを導き出し、
電気機械の動的トルク設定点Tspmotを求め、
それらの両動的トルク設定点を駆動装置に適用する。
【0036】
用語
以降の説明において、以下の表記を使用する。
ξ:NOxピーク削減因子[単位%]
β:NOx設定点初期化閾値[単位ppm]
αi:NOx排出物モデルの較正パラメータ[無単位]
Fsp1:吸気マニフォールド内の燃焼気体質量分率設定点[単位%]
Fest1:吸気マニフォールド内の燃焼気体質量分率の予測値[単位%]
Ne:熱エンジン回転数[単位rpm]
Tsppwt:駆動装置の静的トルク設定点[単位Nm]
Tspeng,s:駆動装置のトルク設定点の関数としての、達成される熱エンジンの静的トルク設定点[単位Nm]
Tspmot,s:駆動装置のトルク設定点の関数としての、達成される電気機械の静的トルク設定点[単位Nm]
Tspeng:動的熱エンジントルク設定点[単位Nm]
Tspmot:動的電気機械トルク設定点[単位Nm]
【0037】
【数3】
【0038】
【数4】
【0039】
ΔNOx:目標定常点に対するNOxピーク振幅[単位ppm]
εNOx:NOx排出物誤差[単位ppm]
【0040】
【数5】
【0041】
NOsx:定常点でのNOx排出物の値[単位ppm]
NOx(t):基準トルク遷移によって発生するNOx排出物[単位ppm]
NOspx:NOx排出物設定点[単位ppm]
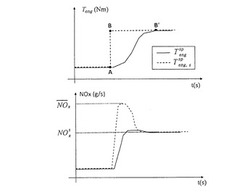
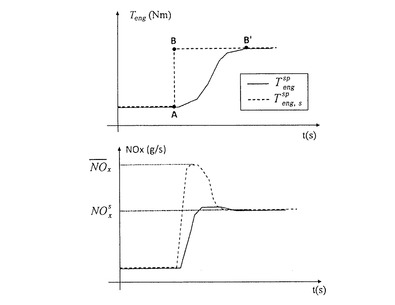
この方法の原理は、遷移動作過程中のNOx排出物を最小化する熱エンジントルク軌跡の計算にある。図3は、このような方法の原理を示す図である。それは、トルク設定点が点Aと点Bとの間の範囲で変動するときに、過渡NOx排出物の超過をもたらすかどうかを判断することにある。太線で表された曲線は、本発明の方法を使用して得られた熱エンジントルクの変動とその変動に応じたNOx排出物の変動とを示しており、複数の点線は
瞬間的に熱エンジントルクが変動した場合における、その熱エンジントルク変動とその変動に応じたNOx排出物の変動とを示している。
【0042】
好ましい実施形態においては、駆動装置に、排気ガス循環回路(EGR)が備わっている。この場合、一般的に、高エンジントルク変動が、空気ループ(吸気と排気ガスの再循環)の大きな逸脱の原因となる。さらに、燃焼室内の熱動力学状態が定常状態から逸脱し、NOx排出物が増加する。そのため、熱エンジントルクの新しい軌跡を計算することが好ましい。この新しいトルク設定点を求める方法は、2つの静的トルク点(AとB)の間で排出物を最小にできる軌跡を求めることを可能にするNOx排出モデルを使用する。点Aから点Bへの遷移は、もはや即時に行われるものではなく、点B’に向かう軌跡に沿って行われる。この過程の間に、熱エンジントルクは、車輪トルク要求が満たされるように、電気機械によって補償される。したがって、この方法では、NOx排出の逸脱につながる要求を限定するような熱エンジントルクの補償を行うことになる。
【0043】
実施形態の提示
以下で説明する実施形態は、燃焼気体再循環回路を備えたディーゼルエンジンに関する。さらに、本実施形態において、静的または疑似静的な型式のエネルギースーパバイザによって、定常状態におけるハイブリッド駆動装置の複数のトルク設定点を求めることができる。
【0044】
段階1)トルク設定点の取得
本発明の最終的な目的は、過渡部分でのNOx排出物を減少させることである。遷移状態と呼ばれるものは、静的トルク設定点から第2の静的トルク設定点への移動である。
【0045】
図4に示したように、熱エンジンに適用される静的トルク設定点Tspeng,sと電気機械に適用される静的トルク設定点Tspmot,sとは、駆動系のトルク設定点Tsppwtから求められる。これらの静的トルク設定点は、エネルギースーパバイザによって求められ、それに縦続する形で本発明の制御方法が実装される。このエネルギースーパバイザ(特に疑似静的な型式のエネルギースーパバイザ)の目的は、熱エンジンおよび電気機械の複数の動作点と、したがって複数のトルク設定点とを選択することである。本発明は、ECMS型の疑似静的エネルギースーパバイザを補完する。しかし、本発明は疑似静的エネルギースーパバイザとは完全に独立しており、任意のエネルギースーパバイザの下流で動作することができる。駆動装置のトルク設定点Tsppwtは、車輪トルク要求、特に乗り物のドライバによって要求される車輪トルク要求に対応している。
【0046】
段階2)NOx排出モデルの構成
動的NOx排出設定点は、ディーゼルエンジンのNOx排出物を求めるNOx排出モデルから計算される。NOx排出モデルと呼ばれるものは、ディーゼルエンジンのNOx排出物をハイブリッド駆動装置のディーゼルエンジンのトルクの関数として予測できるモデルのことである。このモデルがエンジンのNOx排出物を正確に表すようにするためには、このモデルは、使用される駆動装置のディーゼルエンジンに対して較正されなければならず、さらに、熱エンジン回転数Nsなどディーゼルエンジンの動作条件に依存しなければならない。なお、形容詞「動的」は、NOx排出設定点が、遷移状態、つまり2つの定常状態動作点の間に適用される設定点であることを示しており、この設定点は時間の関数として進展する。
【0047】
このモデルは、以降で動的NOx排出設定点から動的トルク設定点を求められるように、反転可能である。このモデルとしては、半経験的NOx排出モデルを使用することができる。
【0048】
本明細書では、トルク軌跡は、図4に示すように、静的な計算に対して従属して計算される。これにより、静的最適化戦略によって計算された静的トルク設定点Tspeng,sは修正されて、動的トルク設定点がTspengとして算出される。なお、熱エンジンのトルク設定点、電気機械のトルク設定点、および、ハイブリッド駆動装置のトルク設定点を関連付ける複数の関係は数6に示すように変化しないままである。
【0049】
【数6】
【0050】
NOx排出物は、半経験的モデルによって以下のように計算される。
【0051】
【数7】
【0052】
これは、排出物に対して、エンジン回転数Ns、吸気部分での燃焼気体分率F1およびシリンダ内の最高温度
【0053】
【数8】
【0054】
を関連付ける相関を示す。これらの数値が選択される理由は、これらの数値がディーゼルエンジンの燃焼室内におけるNOx生成に関連しているからである。このモデルは以下の文献に詳細が記述されている。
J.C.Schmitt、M.Fremovici、O.GrondinおよびF.Le Berr、「Compression Ignition Engine Model Supporting Powertrain Development(パワートレイン開発を支援する圧縮点火エンジンモデル)」,Proceedings of the IFAC workshop on engine and powertrain control,simulation and modeling、リュエイユ=マルメゾン、フランス、2009年11月30日〜12月2日。
【0055】
数7における関数φは、具体的には、
【0056】
【数9】
【0057】
で与えられる。
【0058】
係数αiは、半物理NOxモデルの較正パラメータである。各係数の値は、エンジンテストベンチ上の試験などの実験データから計算され、エンジンに対して有効である。一般に、熱エンジンの較正から得られるデータは、この型のモデルの較正のためには満足いくものである。
【0059】
段階3)NOx排出設定点の計算
図5aは、一般的な条件において、過渡状態における熱エンジンの動的NOx排出設定点NOxspxを計算するための原理を示している。本方法では、ディーゼルエンジンのNOx排出物を求めるNOx排出モデルが使用されている。
【0060】
図5bは、本実施形態の特別な場合における、上記の計算の原理を示している。駆動装置のモデルは、NOx排出物を表すモデルとエンジン空気ループ動力学を表すモデルに基づいている。空気ループ(10)は、吸気回路と排気ガス再循環回路全体である。これら2つのモデルの複雑さは、電子計算機内に実時間を用いて実装できるエネルギー最適化戦略内への組み込みに合わせている。これは、複数のNOx排出物と、エンジン吸気部分での燃焼気体分率の動力学を表している純粋な遅れを有している1次フィルタについての半経験的モデル(または「グレーボックス」モデル)である。
【0061】
これらのNOx排出物と燃焼気体の動力学の複数のモデルとは、エンジン回転数Neと、マニフォールド内の燃焼気体分率設定点Fsplとに依存する。マニフォールドは、ディーゼルエンジンのシリンダの上流にあり、燃焼気体分率設定点Fsplは、エンジン回転数Neおよびトルク設定点Tspeng,sに依存している写像(関数)によって与えられる。
【0062】
この図5bは、トルク軌跡の計算における2つの主要な段階、すなわち、複数の過渡動作条件下で排出されるNOx排出物を求める段階と、基準の場合に比べて減少した排出設定点からエンジントルク設定点の新規の軌跡を計算する段階とを示している。先ず、NOxモデルに静的な最適化に起因するトルク設定点Tspeng,sが入力される。モデルは、現在の設定点に依存し、過去の計算ステップには依存せずに、そのモデルが補正されない場合に発生するNOxピーク振幅を求める。この値は、新しいトルク軌跡の計算においてNOx設定点の計算の基礎となる。まとめると、NOxモデルと空気ループ動力学モデルによって、排出物のピークを制限するような、装置特有の動力学に関するトルク設定点のフィルタリングを確実に行うことができる。
【0063】
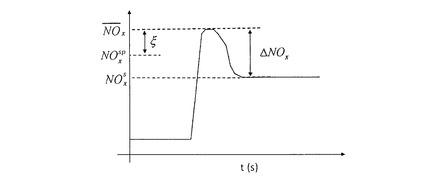
このモデルにおいて、NOx排出注意率は、初期のNOxピークの注意率の振幅に対応している調整パラメータξによって定められる。したがって、NOxの削減をパラメータξの値によって調整することができる。例えば、図6において、2つの動作点の間の過渡状態は、NOsxで表されている定常状態排出レベルの超過につながる可能性がある。この超過の振幅は、
【0064】
【数10】
【0065】
によって表される。したがって、パラメータξを調整することによって、外部の複数の条件に制御を適合させることができる。例えば、低排出物レベルの乗り物の侵入が許可されている都市部の地域の場合、パラメータは、その目的に合うように適合することができる。
【0066】
顕著な超過の場合、調整パラメータξによって、それを横切ることが設定点の役割を果たすことになる許容可能な閾値
【0067】
【数11】
【0068】
を定める。ここでΔNOxは、定常状態排出物レベルと最大過渡状態ピーク値との差である。
【0069】
【数12】
【0070】
ここでNOsxは複数の定常状態条件下でのNOx排出レベルである。パラメータξによって、過渡状態補正の強度を調整することができる。パラメータξがゼロの場合、NOx制限戦略が非アクティブになる。パラメータξがゼロでない場合、許容可能な超過値が定められる。
【0071】
NOx排出モデル、例えば、方程式(4)は、以下の計算に使用される。
i.定常動作点の静的な値NOsx
ii.動的NOx排出設定点を定めることができる基準トルク遷移NOx(t)によって発生する排出物の瞬間値
iii.制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)。なお、この値は本方法の進行には有用ではないが、この値によって過渡状態中に発生するNOx排出物の値を知ることができる。
【0072】
i.定常動作点での静的な値NOsxの計算について
定常状態動作点でのNOx排出物の静的な値NOsxは、
【0073】
【数13】
【0074】
で得られる。ここで、
【0075】
【数14】
【0076】
はエンジン回転数Neと定常状態動作点でのトルク値とに従う写像ψ(図7)から計算されたシリンダ内の最高温度である。
【0077】
【数15】
【0078】
また、Fsplは、定常状態動作点での吸気マニフォールド内の燃焼気体分率設定点である。これは、エンジン回転数とトルク設定点とに従う写像fによって、以下のように与えられる。
【0079】
【数16】
【0080】
方程式(7)を(9)と組み合わせることによって、定常状態動作点におけるNOx排出物の値NOsxが、ディーゼルエンジンの静的トルク設定点Tspeng,sとディーゼルエンジン回転数Neの関数として得られる。
【0081】
ii.基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値の計算について
基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値は次のように与えられる。
【0082】
【数17】
【0083】
ここでTspcylはシリンダ内の最高温度(NOsxの計算の場合と同じ値、方程式(8))であり、Festl(t)は吸気マニフォールド内の予測される燃焼気体分率である。これは、吸気部分での燃焼気体の動力学に関連している。気体の搬送動力学モデルは、数18のように、純粋な遅延に関連する1次のフィルタである。
【0084】
【数18】
【0085】
ここで、フィルタ時定数τと純粋な遅延trとはエンジン回転数の関数として、以下のようにパラメータ化されている。
【0086】
【数19】
【0087】
相関係数krおよびkτによって、燃焼気体動力学を調整することが可能であり、それらは遷移排出物制限戦略を調整する2つのパラメータとなる。例えば、それらは、エンジンテストベンチ上での試験中に実験的に求めることができる。基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値は、方程式(4)によって記述される定常状態点ΔNOxに関連しているNOxピークの振幅の計算に関連している。
【0088】
【数20】
【0089】
の値は、遷移排出ピークの最大振幅から計算され、誤差εNOxが設定閾値βよりも大きい限り一定である。εNOxは基準トルク遷移によって発生する排出物と定常点の値NOsxとの間の誤差を表している。装置が一旦定常状態になると、
【0090】
【数21】
【0091】
を静的な値NOsxに線形化する必要がある。この条件は、2つの連続した遷移の独立性を保証する。最後に、NOxピークの最大値が以下のように記述される。
【0092】
【数22】
【0093】
ここで
【0094】
【数23】
【0095】
である。
【0096】
方程式(6)に対して、この値
【0097】
【数24】
【0098】
と前の段階で求められている定常動作点でのNOx排出物の値NOsxを代入することによって、ΔNOxを計算し、それから方程式(5)を適用することによって動的NOx排出設定点NOspxを求める。
【0099】
iii.制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)の計算について
制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)は以下の式で与えられる
【0100】
【数25】
【0101】
この量は本方法では使用されない。しかし、この値から複数の遷移条件下で発生する排出物の情報が得られる。この値は、通常のトルク遷移によって発生する排出物の予測された値よりも常に小さい。方程式(16)において、Festlは予測された吸気成分(NOx(t)の計算についての値と同じ値、方程式(11))であり、
【0102】
【数26】
【0103】
は、以下のように、修正されたトルク設定点から計算されるシリンダ内の最高温度である。
【0104】
【数27】
【0105】
段階4)ディーゼルエンジン動的トルク設定点を導き出す
一度、設定点NOspxが計算されると、新しい動的トルク設定点Tspengを計算できるようにNOx排出モデルが反転される。NOx排出モデルには、戦略において2つの目的がある。最初に、静的な最適化戦略に起因するトルク設定点に対する装置の応答を計算し、それからNOx設定点を導き出すことができる。そして、NOx設定点を反転し、この設定点を満たしているトルク軌跡を計算することができる。
【0106】
実施形態において、前述の複数の方程式(特に(6)と(8))は反転することができる。修正されたトルク軌跡は、以下の数28のように、方程式(8)によって記述されている最高シリンダ温度モデルを反転することによって得られる。
【0107】
【数28】
【0108】
ここで、温度
【0109】
【数29】
【0110】
は、排出物が設定点NOspxを満たすような燃焼室内の最高温度軌跡に対応している。温度
【0111】
【数30】
【0112】
は、方程式(5)によって与えられる排出モデルを反転することによって、そして設定点NOspxと吸気部分での気体組成の予測値から、以下のように計算される。
【0113】
【数31】
【0114】
ここで、関数φ−1は以下のように書かれる。
【0115】
【数32】
【0116】
方程式(18)と(20)とを組み合わせることによって、ディーゼルエンジンの動的トルク設定点Tspengが得られ、この設定点は、エンジン回転数Ne、吸気マニフォールド内の予測される燃焼気体分率Festl、および動的NOx排出設定点NOspxに依存している。
【0117】
段階5)電気機械の動的トルク設定点を求める
本発明による方法は、車輪トルク要求が満たされるように複数の遷移条件下での熱エンジントルク補償を少なくとも1つの電気機械によって実現する。そのため、電気機械の動的トルク設定点を求める必要がある。このトルク設定点は、方程式(1)によって、以下のように求めることができる。
【0118】
【数33】
【0119】
段階6)動的トルク設定点の適用
本発明によって、ハイブリッド装置の駆動手段のトルク設定点を求めることができる。これらの設定点を熱エンジンと電気機械とに適用することによって、排出物が削減され、燃料消費も限定される。
【0120】
静的状態における最適化と遷移状態における最適化の2つの層を区分することによって、遷移最適化に対する高頻度高周波と静的な部分に対する低頻度の2つのサンプリング期間に分離することができる。動的な最適化期間は、エンジンに関する物理現象、本例の場合では、排出物の生成に対して適している。
【0121】
本方法の複数のパラメータと大きさの度合いとを表2(本戦略の調整パラメータの一覧)にまとめている。
【0122】
【表2】
【0123】
(変形例)
本発明を好ましい実施形態の場合において説明した。しかし本発明は、組み合わせ可能な異なる複数の変形例にも関連させることができる。
【0124】
段階1)トルク設定点の取得
静的トルク設定点は、特にハイブリッド駆動装置にエネルギースーパバイザが備わっていない実施形態においては、静的または疑似静的な種類のエネルギースーパバイザからの要求ではなく自動車のドライバの要求に直接起因していてもよい。
【0125】
段階2)NOx排出モデルの構成
熱エンジンに排気ガス再循環回路が備わっていない場合、エンジン回転数とシリンダ温度だけに依存している反転可能なNOx排出モデル
【0126】
【数34】
【0127】
を用いることが可能である。このシリンダ温度は熱エンジントルク設定点(
【0128】
【数35】
【0129】
は有効なまま)の関数である。好ましい実施形態では、このNOx排出モデルはエンジンテストベンチ上での実験試験に関連させることによって得られた半経験的モデルである。たとえば、方程式(4)は、吸気マニフォールド内の燃焼気体分率がゼロであると仮定することによって書き直すことが可能である。この場合、次の式を得る。
【0130】
【数36】
【0131】
段階3)NOx排出設定点の計算
NOx排出減衰率を求めるために調整パラメータξを使用する代わりに、超過すべきではないNOx排出閾値Sを定めることが可能で、この閾値Sはどのような静的な状態に到達しようが固定したり、目標の定常動作点に依存させたりすることができる。そのため方程式NOspx≦Sを満たさなければならない。この不等式は、段階ii)で前述の実施形態の方程式(3)の代わりに導入される。この閾値は、排出物に関する施行されている法律によって設定することができる。
【0132】
段階4)ディーゼルエンジン動的トルク設定点を導き出す
ディーゼルエンジンに排気ガス再循環回路が備わっていないときには、ディーゼルエンジン動的トルク設定点
【0133】
【数37】
【0134】
と、そして
【0135】
【数38】
【0136】
を導き出すように、NOx排出モデル
【0137】
【数39】
【0138】
が反転される。
【0139】
段階5)電気機械の動的トルク設定点を求める
電気機械の能力(動作範囲)を考慮した他の種類の補償を本発明の制御方法において使用することができる。例えば、電気機械の動的トルク設定点Tspmotが電気機械によって許容される最大トルクを超える場合、電気機械のトルク設定点は、この最大トルクに設定され、それから熱エンジンの動的トルク設定点Tspengが電気機械の動的トルク設定点の変化に動的トルク設定点Tspengを適合させることによって再計算される。したがってハイブリッド駆動装置の複数の構成要素が最適に使用されるが、排出物削減は最適ではない。
【0140】
応用例
この部分で示す結果は、パラレル構成のディーゼルハイブリッド乗り物のシミュレーションから得られる。ディーゼルエンジンには燃焼気体再循環装置が備わっている。熱エンジンモデルは排出物、特にNOx排出物を予測可能な物理モデルである。そのようなモデルは、例えば、以下の文献に記載されている。
R.Lebas、G.Mauvio、F.Le BerrおよびA.Albrecht,、「A phenomenological approach to model diesel engine combustion and in−cylinder pollutant emissions adapted to control strategy(制御戦略に適合しているモデルディーゼルエンジン燃焼とシリンダ内汚染物質排出物に対する現象的アプローチ)」、Proceedings of the IFAC workshop on engine and powertrain control, simulation and modeling、リュエイユ=マルメゾン、フランス、2009年11月30日〜12月2日
このモデルは、ユーロ6ディーゼルエンジン上で実施された試験から較正された。過渡条件下における排出物制限の戦略が、原理が最適制御に基づいている静的エネルギースーパバイザに結合されている。これは前述の文献に示されている。
【0141】
O.Grondin、L.Thiboult、Ph.Moulin、A.Chasse、およびA.Sciorretta、「Energy Management Strategy for Diesel Hybrid Electric Vehicle(ディーゼルハイブリッド電気乗り物のエネルギー管理戦略)」、Proceedings of the 7th IEEE vehicle Power and Propulsion Conference、合衆国、シカゴ、2011年9月6〜9日。
【0142】
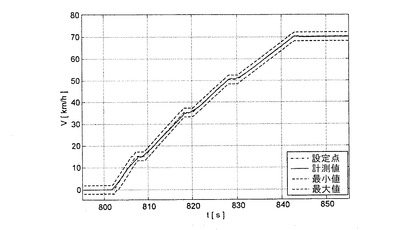
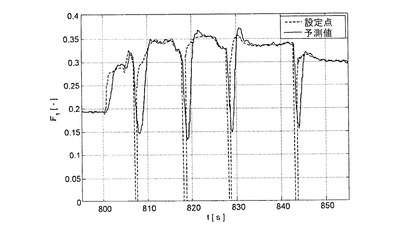
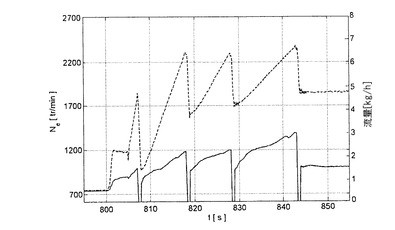
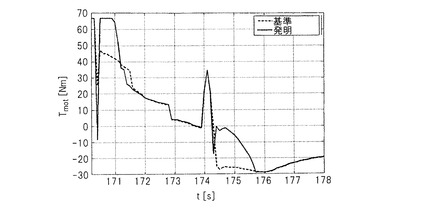
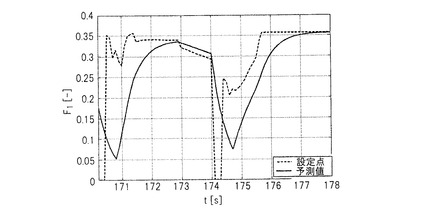
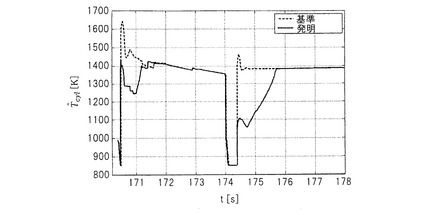
図8aから8fは、制御方法が作動しているFTP駆動サイクルの部分を示している。具体的には、先ず、複数の定常動作点は修正されていないことが示されている。他方、過渡状態において、熱エンジンのトルクは制限されている(図8a)。制限は吸気部分の位置で燃焼気体分率の設定点と予測との間に大きな違いがある過程で動作する(図8c)。この場合、内部NOxモデルは、定常状態における予測レベルを大きく超過することを予測する。トルク分布は変化しており、電気機械は熱エンジン動力学を制限できるようにする(図8b))。これらの過程の間に出現する複数の排出のピーク(図8f))が大幅に減少する。排出物のピークの減少はシリンダ内の温度の制限に起因していることがわかる(図8d))。実際に、この量は、運動学的なNOx生成機構において非常に重要である。これらの結果は、NOx排出物の生成を左右する複数の物理量をエネルギースーパバイザにおいて考慮することが良好な結果につながることを示している。
【0143】
図9は、FTPドライビングサイクルにおいて、これらのシミュレーションについて調整パラメータξの値を走査させて得られるハイブリッド乗り物消費とNOx排出物とを示している。これらの結果は、乗り物の消費を変えずにNOx排出物の値を減少させることができるようにするこのパラメータの複数の値を見つけることができることを示している。これは、ξが10%と40%との間にある場合である。大きい値については、排出物は連続して減少するが、消費は際だって増加する可能性がある。この場合、パラメータξによって、NOx排出物と燃料消費との間での妥協を調整することができる。ともかくも、FTPサイクルにおける過渡NOx排出物の部分は図10に示しているようにパラメータξが増加すると減少する。
【0144】
さらに、本発明の方法は、以下の利点がある。
【0145】
遷移過程中にオンライン排出物レベルの修正を可能にする。
【0146】
関連している物理現象モデルを使用している。
【0147】
NOx排出物予測についての(相関型の)半物理モデルと空気ループ動力学モデルとによって調整パラメータの数が限定される。
【0148】
本方法は圧縮点火エンジンを備えているハイブリッド乗り物に適しているが、火花点火エンジンに適している可能性もある。
【技術分野】
【0001】
本発明は、エンジン制御の分野に関し、特に、排出物を減らすための乗り物用ハイブリッド駆動装置の過渡状態制御に関する。
【0002】
ハイブリッド乗り物は、乗り物の駆動するために、少なくとも1つの電気機械と少なくとも1つの熱エンジンとを有している乗り物である。
【背景技術】
【0003】
ある定常動作点から他の定常動作点への変化によって発生される過渡状態における内燃エンジンからの排出物に考慮することは、非常に重要な課題である。実際、現在のエンジンからの排出物は、動作の逸脱に対して非常に敏感である。さらに、将来承認されるドライブサイクルには、より多くの過渡規制が課されることになる。ディーゼルエンジンを備えているハイブリッド乗り物の場合、問題は2つの側面があり、一方では、定常状態動作点において、NOx排出物(窒素酸化物:熱エンジンによって排出される汚染物質)と燃料消費との間で妥協を図らなくてはならず、他方では、NOx排出のピークが観測されるエンジンの過渡動作規制を管理しなければならない。
【0004】
図1aから1dは、過渡状態における排出物問題の一例を示している。この例は、排気ガス再循環装置(EGR)を備えているハイブリッド駆動装置に対するNEDC(新ヨーロッパドライビングサイクル:ヨーロッパの道路で遭遇する条件を再現可能に模倣することを意図した自動車のドライブサイクルであり、乗り物の消費と排出物とを計測するために主に使用される)形式のドライビングサイクルにおける、都市外部型の第1の加速度を示している。ギア比の変化過程では、噴射カットオフが必然的に排気部分での燃料濃度を減少させることになる。このため、加速中に噴射が回復した場合、吸気部分で利用できる燃焼気体が制限される。この場合、吸気部分における燃焼気体分率は設定点に即座に収束することができない。その応答時間は、EGR回路内の燃焼気体搬送時間に依存する。このような過渡過程では、吸気部分における気体の組成は、したがって、シリンダにおける気体の組成も、その設定点に収束せず、NOx排出物量が静的状態の排出物量を超えてしまう。これらの排出のピークの大きさは、定常状態の元で予想されるレベルと比較して高い。これらのピークは、ドライビングサイクルの種類に応じて異なるが、排出物の累積値内の少なくない部分を占めている。
【0005】
ヨーロッパドライビングサイクル(NEDC)全体では、過渡部分でのNOx排出物は、全NOx排出物の15%を超えない。一方、FTP(連邦試験手順:排出物の計測に合衆国で使用されるドライブサイクル)形式のドライビングサイクルについては、表1に示されたように、過渡部分でのNOx排出物は、全排出物の40%を超えている。なお、表1は、2つのドライビングサイクル(NEDCとFTP)のそれぞれに対して計測されたNOx排出物と疑似静的NOx排出物との比較と、各サイクルについての全排出物中の過渡部分における排出物の割合とを示している。
【0006】
【表1】
【0007】
したがって、過渡部分の排出物を考慮することは、エンジン制御に関する重要な問題である。このような文脈において、熱エンジンのハイブリッド化は、問題解決に対する高い潜在性を有している。その着想は、熱エンジンのトルク設定点を補償する電気機械またはオルタネータスタータを使用することで、過渡条件下において、熱エンジンストレスを制限することである。
【0008】
エネルギースーパバイザは、このようなハイブリッド駆動装置を制御ために開発されてきた。これには、最適な制御に基づいた幾つかの方法がある。この種類のエネルギースーパバイザは、非特許文献1〜3に記載されている。
【0009】
しかし、これらのエネルギースーパバイザは、ハイブリッド駆動装置の静的状態の管理には向いているが、過渡状態の管理には適していない。
【0010】
熱エンジンは、一般的に、純粋な疑似静的装置であると仮定されている。しかしながら、この仮定は、エンジントルクを考慮する場合には容認されるが、排出物を考慮する場合には誤っている。したがって、全排出物に対する、過渡動作過程中に発生する排出物の量は、少なくない。このため、静的スーパバイザによって選択されている2つの定常点間の過渡を考慮することが必要である。
【0011】
図2aおよび2bは、NOx排出物に対するトルク勾配の影響を示している。エンジンの過渡動作過程を管理するために、失われたトルクを与えて車輪の設定点を合わせる電気機械を使用して、熱エンジンから要求されるトルク勾配の値を制限することを意図した経験的な方法が開発されてきている。この種類の経験的方法は非特許文献4および5に記載されている。
【先行技術文献】
【非特許文献】
【0012】
【非特許文献1】A.Sciarrettoa、M.Back、およびL.Guzzella、「Optimal control of parallel hybrid electric vehicles(パラレルハイブリッド電気乗り物の最適制御)」,IEEE Transactions on Control Systems Technology、vol.2、no.3、2004年5月
【非特許文献2】A.Chasse、A.Sciarrett、およびJ.Chouvin、「Online optimal control of a parallel hybrid with costate adaption rule(共状態適応規則によるパラレルハイブリッドのオンライン最適制御)」、Proceedings of the IFAC Symposium on Advances in Automotive Control、ドイツ、ミュンヘン、2010年7月12〜14日
【非特許文献3】O.Grondin、L.Thiboult、Ph.Moulin、A.Chasse、およびA.Sciorretta、「Energy Management Strategy for Diesel Hybrid Electric Vehicle(ディーゼルハイブリッド電気乗り物のエネルギー管理戦略)」、Proceedings of the 7th IEEE vehicle Power and Propulsion Conference、合衆国、シカゴ、2011年9月6〜9日
【非特許文献4】N.Lindenkomp、C.−P.Stober−Schmidt、およびP.Eilts、「Strategies for Reducing NOx and Particulate Matter Emissions in Diesel Hybrid Electric vehicles(ディーゼルハイブリッド電気乗り物においてNOxと粒子状物質排出物を減少させる戦略)」、SAE Paper n°2009−01−1305、2009
【非特許文献5】O.Predelli、F.Bunar、J.Manns、R.BuchwaldおよびA.Sommer、「Laying Out Diesel−Engine Control Systems in Passenger−Car Hybrid Drives(乗用車ハイブリッド駆動におけるディーゼルエンジン制御装置のレイアウト)」、Proceedings of the IAV conference on Hybrid Vehicle and Energy Management、131〜151ページ、2007年2月14〜15日
【発明の概要】
【発明が解決しようとする課題】
【0013】
しかしながら、この種類の経験的な戦略では、最適な軌跡を見出すことはできず、勾配の調整は、エンジンと、その較正、そして駆動モデルに依存する。実際、これらの勾配の複数の制限事項は、サイクルごとに較正しなければならない。
【0014】
本発明の目的は、熱エンジンの排出物を最小にするトルク軌跡が定められている乗り物用のハイブリッド駆動装置を制御する方法を提供することである。本方法は、過渡動作過程中に、電気機械のトルク設定点と熱エンジンのトルク設定点との間の分配を修正するものである。その原理は、熱エンジンのトルク設定点の動力学を制限することにある。電気機械は、車輪の要求を満たすようにトルク補償を実現する。そのため、本発明によれば、ハイブリッド駆動装置のディーゼルエンジンのNOx排出物がモデル化され、このモデルはハイブリッド駆動装置の構成要素の複数のトルク設定点を定めるように使用される。
【0015】
このモデルの利点は、トルク軌跡の計算において、排出物の生成を左右する物理現象が考慮されることにある。また、関連する複数の物理現象を考慮した複数のモデルを使用することにより、本方法の実装が確実になり、1つの調整パラメータの較正で良くなるため、その調整が簡単になる。さらに、本制御方法によって、ハイブリッド化に伴う燃料消費の利点を維持しながら、過渡部分におけるNOx排出物を減少させることができる。そのうえ、本発明の方法は、従来の(静的な)戦略を補い、ハイブリッド乗り物の管理における静的および過渡的な目的を分離することができる。
【課題を解決するための手段】
【0016】
本発明は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、前記ディーゼルエンジンの静的トルク設定点Tspeng,sが求められており、
前記ディーゼルエンジンの排出物を前記ディーゼルエンジンのトルクTengの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、
動的NOx排出設定点NOspxを前記NOx排出モデルと前記ディーゼルエンジンの前記静的トルク設定点Tspeng、sから計算し、
前記ディーゼルエンジンの動的トルク設定点Tspengを前記動的NOx排出設定点NOspxから導き出し、
前記電気機械の動的トルク設定点Tspmotを前記ディーゼルエンジンの前記動的トルク設定点Tspengの関数として求め、
その両方の前記動的トルク設定点を前記駆動装置に適用する、
ことを特徴とする方法に関する。
【0017】
一実施態様において、前記窒素酸化物排出モデルはディーゼルエンジン回転数とエンジンシリンダ内の最高温度とに依存している。
【0018】
前記ディーゼルエンジンは、燃焼気体を前記ディーゼルエンジンのシリンダの上流の吸気マニフォールドに導く排気ガス再循環装置を備えており、前記NOx排出モデルは前記ディーゼルエンジンの前記吸気マニフォールド内の燃焼気体分率Fest1に依存していることが有利である。
【0019】
好ましくは、NOx排出物は以下の公式によってモデル化される。
【0020】
【数1】
【0021】
ここで、
α1からα7:NOxモデルの較正係数、
Ne:ディーゼルエンジン回転数、
【0022】
【数2】
【0023】
F1:ディーゼルエンジンに排気ガス再循環回路が備わっている場合における、吸気マニフォールド内の燃焼気体分率、(他の場合には、この値はゼロ)
NOx:NOx排出物レベルである。
【0024】
一実施態様において、NOx排出閾値がディーゼルエンジンに対して定義され、NOx排出設定点NOspxは閾値の関数として計算される。
【0025】
その代わりに、NOx排出削減因子ξを設定可能で、NOx排出設定点NOspxは削減因子ξの関数として計算される。
【0026】
さらに、ディーゼルエンジンの動的トルク設定点の導き出された値は、NOx排出モデルを逆転することによって求められる。
【0027】
前記ディーゼルエンジンの静的トルク設定点Tspeng,sは、エネルギースーパバイザ、特にハイブリッド駆動装置に備わっている疑似静的エネルギースーパバイザによって駆動装置トルク設定点Tsppwtから求められることが好ましい。
【0028】
また、本発明は、上記の方法をコンピュータに実行させるためのプログラムにも関する。プログラムは、通信ネットワークからダウンロード可能でもよいし、コンピュータが読み取り可能な媒体に記録されていてもよいし、コントローラが実行可能な媒体に記録されてもよい。また、このプログラムは、プログラムがコントローラ上で実行されるときに、上記の方法を実装する複数のプログラムコード命令を有している。
【0029】
さらに本発明は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置にさらに関する。駆動装置は、前述の制御方法によって制御される。過渡状態における駆動装置の制御は、疑似静的エネルギースーパバイザに対して縦続して行うことができる。
【0030】
また、本発明は、本発明のハイブリッド駆動装置を有していることを特徴とする乗り物、特に自動車にも関する。
【0031】
本発明の方法のその他の特徴と利点とは、添付の図面を参照して、非限定的な例により説明する実施形態の以降の説明を読むことで明らかになろう。
【発明の効果】
【0032】
本発明によれば、ハイブリッド駆動装置における熱エンジンの過渡排出物を、それらの発生に関わる複数の物理的現象を考慮することによって、減少させることができる。
【図面の簡単な説明】
【0033】
【図1a】乗り物の速度に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1b】吸気マニフォールド内の燃焼気体分率に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1c】エンジン回転数に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図1d】NOx排出物に関して、NEDC駆動サイクルの郊外の部分の第1の加速についての計測されたNOx排出物と疑似静的NOx排出物とを比較するための図である。
【図2a】過渡状態でのエンジントルク勾配(dT)のNOx排出物に対する影響を示す図である。
【図2b】過渡状態でのエンジントルク勾配(dT)のNOx排出物に対する影響を示す図である。
【図3】熱エンジントルクと窒素酸化物排出の動的設定点を示す図である。
【図4】動的戦略の流れ図である。
【図5a】熱エンジンのトルク設定点軌跡の計算の流れ図であって、NOx排出モデルを示す流れ図である。
【図5b】熱エンジンのトルク設定点軌跡の計算の流れ図であって、具体的な実施形態を示す流れ図である。
【図6】NOx設定点の計算の原理を示す図である。
【図7】シリンダの最高温度マップを示す図である。
【図8a】熱エンジントルクに関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8b】電気モータトルクに関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8c】燃焼気体分率に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8d】シリンダ温度に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8e】NOx排出物に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図8f】NOx排出物に関する本発明のハイブリッド駆動装置の制御の方法のシミュレーション結果を示す図である。
【図9】様々な減少因子についてのNOx排出物の関数としての燃料消費の進展を示す図である。
【図10】削減因子の関数としてのFTPサイクル内の過渡NOx排出物の部分を示す図である。
【発明を実施するための形態】
【0034】
以下で説明する本実施形態の方法によって、ハイブリッド駆動装置のNOx排出物を減少させることができる。また、NOx排出物を予測できるNOx排出モデルを使用して2つの静的な動作点の間の複数の過渡過程を管理することができる。このモデルによって、内燃エンジンのトルクの関数として、ハイブリッド駆動装置のNOx排出物を求めることができる。
【0035】
本方法は、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンとからなる乗り物(特に自動車)のハイブリッド駆動装置の制御を可能にする。過渡状態について、以下の段階が実施される:
熱エンジンの静的トルク設定点Tspeng,sを得て、
ディーゼルエンジンのNOx排出物をディーゼルエンジンのトルクTengの関数として予測できるNOx排出モデルを構成し、
動的NOx排出設定点NOspxをNOx排出モデルから計算し、ディーゼルエンジンのNOx排出物をトルク設定点Tspeng,sの関数として求め、
ディーゼルエンジンの動的トルク設定点Tspengを導き出し、
電気機械の動的トルク設定点Tspmotを求め、
それらの両動的トルク設定点を駆動装置に適用する。
【0036】
用語
以降の説明において、以下の表記を使用する。
ξ:NOxピーク削減因子[単位%]
β:NOx設定点初期化閾値[単位ppm]
αi:NOx排出物モデルの較正パラメータ[無単位]
Fsp1:吸気マニフォールド内の燃焼気体質量分率設定点[単位%]
Fest1:吸気マニフォールド内の燃焼気体質量分率の予測値[単位%]
Ne:熱エンジン回転数[単位rpm]
Tsppwt:駆動装置の静的トルク設定点[単位Nm]
Tspeng,s:駆動装置のトルク設定点の関数としての、達成される熱エンジンの静的トルク設定点[単位Nm]
Tspmot,s:駆動装置のトルク設定点の関数としての、達成される電気機械の静的トルク設定点[単位Nm]
Tspeng:動的熱エンジントルク設定点[単位Nm]
Tspmot:動的電気機械トルク設定点[単位Nm]
【0037】
【数3】
【0038】
【数4】
【0039】
ΔNOx:目標定常点に対するNOxピーク振幅[単位ppm]
εNOx:NOx排出物誤差[単位ppm]
【0040】
【数5】
【0041】
NOsx:定常点でのNOx排出物の値[単位ppm]
NOx(t):基準トルク遷移によって発生するNOx排出物[単位ppm]
NOspx:NOx排出物設定点[単位ppm]
この方法の原理は、遷移動作過程中のNOx排出物を最小化する熱エンジントルク軌跡の計算にある。図3は、このような方法の原理を示す図である。それは、トルク設定点が点Aと点Bとの間の範囲で変動するときに、過渡NOx排出物の超過をもたらすかどうかを判断することにある。太線で表された曲線は、本発明の方法を使用して得られた熱エンジントルクの変動とその変動に応じたNOx排出物の変動とを示しており、複数の点線は
瞬間的に熱エンジントルクが変動した場合における、その熱エンジントルク変動とその変動に応じたNOx排出物の変動とを示している。
【0042】
好ましい実施形態においては、駆動装置に、排気ガス循環回路(EGR)が備わっている。この場合、一般的に、高エンジントルク変動が、空気ループ(吸気と排気ガスの再循環)の大きな逸脱の原因となる。さらに、燃焼室内の熱動力学状態が定常状態から逸脱し、NOx排出物が増加する。そのため、熱エンジントルクの新しい軌跡を計算することが好ましい。この新しいトルク設定点を求める方法は、2つの静的トルク点(AとB)の間で排出物を最小にできる軌跡を求めることを可能にするNOx排出モデルを使用する。点Aから点Bへの遷移は、もはや即時に行われるものではなく、点B’に向かう軌跡に沿って行われる。この過程の間に、熱エンジントルクは、車輪トルク要求が満たされるように、電気機械によって補償される。したがって、この方法では、NOx排出の逸脱につながる要求を限定するような熱エンジントルクの補償を行うことになる。
【0043】
実施形態の提示
以下で説明する実施形態は、燃焼気体再循環回路を備えたディーゼルエンジンに関する。さらに、本実施形態において、静的または疑似静的な型式のエネルギースーパバイザによって、定常状態におけるハイブリッド駆動装置の複数のトルク設定点を求めることができる。
【0044】
段階1)トルク設定点の取得
本発明の最終的な目的は、過渡部分でのNOx排出物を減少させることである。遷移状態と呼ばれるものは、静的トルク設定点から第2の静的トルク設定点への移動である。
【0045】
図4に示したように、熱エンジンに適用される静的トルク設定点Tspeng,sと電気機械に適用される静的トルク設定点Tspmot,sとは、駆動系のトルク設定点Tsppwtから求められる。これらの静的トルク設定点は、エネルギースーパバイザによって求められ、それに縦続する形で本発明の制御方法が実装される。このエネルギースーパバイザ(特に疑似静的な型式のエネルギースーパバイザ)の目的は、熱エンジンおよび電気機械の複数の動作点と、したがって複数のトルク設定点とを選択することである。本発明は、ECMS型の疑似静的エネルギースーパバイザを補完する。しかし、本発明は疑似静的エネルギースーパバイザとは完全に独立しており、任意のエネルギースーパバイザの下流で動作することができる。駆動装置のトルク設定点Tsppwtは、車輪トルク要求、特に乗り物のドライバによって要求される車輪トルク要求に対応している。
【0046】
段階2)NOx排出モデルの構成
動的NOx排出設定点は、ディーゼルエンジンのNOx排出物を求めるNOx排出モデルから計算される。NOx排出モデルと呼ばれるものは、ディーゼルエンジンのNOx排出物をハイブリッド駆動装置のディーゼルエンジンのトルクの関数として予測できるモデルのことである。このモデルがエンジンのNOx排出物を正確に表すようにするためには、このモデルは、使用される駆動装置のディーゼルエンジンに対して較正されなければならず、さらに、熱エンジン回転数Nsなどディーゼルエンジンの動作条件に依存しなければならない。なお、形容詞「動的」は、NOx排出設定点が、遷移状態、つまり2つの定常状態動作点の間に適用される設定点であることを示しており、この設定点は時間の関数として進展する。
【0047】
このモデルは、以降で動的NOx排出設定点から動的トルク設定点を求められるように、反転可能である。このモデルとしては、半経験的NOx排出モデルを使用することができる。
【0048】
本明細書では、トルク軌跡は、図4に示すように、静的な計算に対して従属して計算される。これにより、静的最適化戦略によって計算された静的トルク設定点Tspeng,sは修正されて、動的トルク設定点がTspengとして算出される。なお、熱エンジンのトルク設定点、電気機械のトルク設定点、および、ハイブリッド駆動装置のトルク設定点を関連付ける複数の関係は数6に示すように変化しないままである。
【0049】
【数6】
【0050】
NOx排出物は、半経験的モデルによって以下のように計算される。
【0051】
【数7】
【0052】
これは、排出物に対して、エンジン回転数Ns、吸気部分での燃焼気体分率F1およびシリンダ内の最高温度
【0053】
【数8】
【0054】
を関連付ける相関を示す。これらの数値が選択される理由は、これらの数値がディーゼルエンジンの燃焼室内におけるNOx生成に関連しているからである。このモデルは以下の文献に詳細が記述されている。
J.C.Schmitt、M.Fremovici、O.GrondinおよびF.Le Berr、「Compression Ignition Engine Model Supporting Powertrain Development(パワートレイン開発を支援する圧縮点火エンジンモデル)」,Proceedings of the IFAC workshop on engine and powertrain control,simulation and modeling、リュエイユ=マルメゾン、フランス、2009年11月30日〜12月2日。
【0055】
数7における関数φは、具体的には、
【0056】
【数9】
【0057】
で与えられる。
【0058】
係数αiは、半物理NOxモデルの較正パラメータである。各係数の値は、エンジンテストベンチ上の試験などの実験データから計算され、エンジンに対して有効である。一般に、熱エンジンの較正から得られるデータは、この型のモデルの較正のためには満足いくものである。
【0059】
段階3)NOx排出設定点の計算
図5aは、一般的な条件において、過渡状態における熱エンジンの動的NOx排出設定点NOxspxを計算するための原理を示している。本方法では、ディーゼルエンジンのNOx排出物を求めるNOx排出モデルが使用されている。
【0060】
図5bは、本実施形態の特別な場合における、上記の計算の原理を示している。駆動装置のモデルは、NOx排出物を表すモデルとエンジン空気ループ動力学を表すモデルに基づいている。空気ループ(10)は、吸気回路と排気ガス再循環回路全体である。これら2つのモデルの複雑さは、電子計算機内に実時間を用いて実装できるエネルギー最適化戦略内への組み込みに合わせている。これは、複数のNOx排出物と、エンジン吸気部分での燃焼気体分率の動力学を表している純粋な遅れを有している1次フィルタについての半経験的モデル(または「グレーボックス」モデル)である。
【0061】
これらのNOx排出物と燃焼気体の動力学の複数のモデルとは、エンジン回転数Neと、マニフォールド内の燃焼気体分率設定点Fsplとに依存する。マニフォールドは、ディーゼルエンジンのシリンダの上流にあり、燃焼気体分率設定点Fsplは、エンジン回転数Neおよびトルク設定点Tspeng,sに依存している写像(関数)によって与えられる。
【0062】
この図5bは、トルク軌跡の計算における2つの主要な段階、すなわち、複数の過渡動作条件下で排出されるNOx排出物を求める段階と、基準の場合に比べて減少した排出設定点からエンジントルク設定点の新規の軌跡を計算する段階とを示している。先ず、NOxモデルに静的な最適化に起因するトルク設定点Tspeng,sが入力される。モデルは、現在の設定点に依存し、過去の計算ステップには依存せずに、そのモデルが補正されない場合に発生するNOxピーク振幅を求める。この値は、新しいトルク軌跡の計算においてNOx設定点の計算の基礎となる。まとめると、NOxモデルと空気ループ動力学モデルによって、排出物のピークを制限するような、装置特有の動力学に関するトルク設定点のフィルタリングを確実に行うことができる。
【0063】
このモデルにおいて、NOx排出注意率は、初期のNOxピークの注意率の振幅に対応している調整パラメータξによって定められる。したがって、NOxの削減をパラメータξの値によって調整することができる。例えば、図6において、2つの動作点の間の過渡状態は、NOsxで表されている定常状態排出レベルの超過につながる可能性がある。この超過の振幅は、
【0064】
【数10】
【0065】
によって表される。したがって、パラメータξを調整することによって、外部の複数の条件に制御を適合させることができる。例えば、低排出物レベルの乗り物の侵入が許可されている都市部の地域の場合、パラメータは、その目的に合うように適合することができる。
【0066】
顕著な超過の場合、調整パラメータξによって、それを横切ることが設定点の役割を果たすことになる許容可能な閾値
【0067】
【数11】
【0068】
を定める。ここでΔNOxは、定常状態排出物レベルと最大過渡状態ピーク値との差である。
【0069】
【数12】
【0070】
ここでNOsxは複数の定常状態条件下でのNOx排出レベルである。パラメータξによって、過渡状態補正の強度を調整することができる。パラメータξがゼロの場合、NOx制限戦略が非アクティブになる。パラメータξがゼロでない場合、許容可能な超過値が定められる。
【0071】
NOx排出モデル、例えば、方程式(4)は、以下の計算に使用される。
i.定常動作点の静的な値NOsx
ii.動的NOx排出設定点を定めることができる基準トルク遷移NOx(t)によって発生する排出物の瞬間値
iii.制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)。なお、この値は本方法の進行には有用ではないが、この値によって過渡状態中に発生するNOx排出物の値を知ることができる。
【0072】
i.定常動作点での静的な値NOsxの計算について
定常状態動作点でのNOx排出物の静的な値NOsxは、
【0073】
【数13】
【0074】
で得られる。ここで、
【0075】
【数14】
【0076】
はエンジン回転数Neと定常状態動作点でのトルク値とに従う写像ψ(図7)から計算されたシリンダ内の最高温度である。
【0077】
【数15】
【0078】
また、Fsplは、定常状態動作点での吸気マニフォールド内の燃焼気体分率設定点である。これは、エンジン回転数とトルク設定点とに従う写像fによって、以下のように与えられる。
【0079】
【数16】
【0080】
方程式(7)を(9)と組み合わせることによって、定常状態動作点におけるNOx排出物の値NOsxが、ディーゼルエンジンの静的トルク設定点Tspeng,sとディーゼルエンジン回転数Neの関数として得られる。
【0081】
ii.基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値の計算について
基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値は次のように与えられる。
【0082】
【数17】
【0083】
ここでTspcylはシリンダ内の最高温度(NOsxの計算の場合と同じ値、方程式(8))であり、Festl(t)は吸気マニフォールド内の予測される燃焼気体分率である。これは、吸気部分での燃焼気体の動力学に関連している。気体の搬送動力学モデルは、数18のように、純粋な遅延に関連する1次のフィルタである。
【0084】
【数18】
【0085】
ここで、フィルタ時定数τと純粋な遅延trとはエンジン回転数の関数として、以下のようにパラメータ化されている。
【0086】
【数19】
【0087】
相関係数krおよびkτによって、燃焼気体動力学を調整することが可能であり、それらは遷移排出物制限戦略を調整する2つのパラメータとなる。例えば、それらは、エンジンテストベンチ上での試験中に実験的に求めることができる。基準トルク遷移NOx(t)によって生成される複数の排出物の瞬間値は、方程式(4)によって記述される定常状態点ΔNOxに関連しているNOxピークの振幅の計算に関連している。
【0088】
【数20】
【0089】
の値は、遷移排出ピークの最大振幅から計算され、誤差εNOxが設定閾値βよりも大きい限り一定である。εNOxは基準トルク遷移によって発生する排出物と定常点の値NOsxとの間の誤差を表している。装置が一旦定常状態になると、
【0090】
【数21】
【0091】
を静的な値NOsxに線形化する必要がある。この条件は、2つの連続した遷移の独立性を保証する。最後に、NOxピークの最大値が以下のように記述される。
【0092】
【数22】
【0093】
ここで
【0094】
【数23】
【0095】
である。
【0096】
方程式(6)に対して、この値
【0097】
【数24】
【0098】
と前の段階で求められている定常動作点でのNOx排出物の値NOsxを代入することによって、ΔNOxを計算し、それから方程式(5)を適用することによって動的NOx排出設定点NOspxを求める。
【0099】
iii.制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)の計算について
制限戦略から得られるトルク遷移によって発生する排出物の瞬間値NOdynx(t)は以下の式で与えられる
【0100】
【数25】
【0101】
この量は本方法では使用されない。しかし、この値から複数の遷移条件下で発生する排出物の情報が得られる。この値は、通常のトルク遷移によって発生する排出物の予測された値よりも常に小さい。方程式(16)において、Festlは予測された吸気成分(NOx(t)の計算についての値と同じ値、方程式(11))であり、
【0102】
【数26】
【0103】
は、以下のように、修正されたトルク設定点から計算されるシリンダ内の最高温度である。
【0104】
【数27】
【0105】
段階4)ディーゼルエンジン動的トルク設定点を導き出す
一度、設定点NOspxが計算されると、新しい動的トルク設定点Tspengを計算できるようにNOx排出モデルが反転される。NOx排出モデルには、戦略において2つの目的がある。最初に、静的な最適化戦略に起因するトルク設定点に対する装置の応答を計算し、それからNOx設定点を導き出すことができる。そして、NOx設定点を反転し、この設定点を満たしているトルク軌跡を計算することができる。
【0106】
実施形態において、前述の複数の方程式(特に(6)と(8))は反転することができる。修正されたトルク軌跡は、以下の数28のように、方程式(8)によって記述されている最高シリンダ温度モデルを反転することによって得られる。
【0107】
【数28】
【0108】
ここで、温度
【0109】
【数29】
【0110】
は、排出物が設定点NOspxを満たすような燃焼室内の最高温度軌跡に対応している。温度
【0111】
【数30】
【0112】
は、方程式(5)によって与えられる排出モデルを反転することによって、そして設定点NOspxと吸気部分での気体組成の予測値から、以下のように計算される。
【0113】
【数31】
【0114】
ここで、関数φ−1は以下のように書かれる。
【0115】
【数32】
【0116】
方程式(18)と(20)とを組み合わせることによって、ディーゼルエンジンの動的トルク設定点Tspengが得られ、この設定点は、エンジン回転数Ne、吸気マニフォールド内の予測される燃焼気体分率Festl、および動的NOx排出設定点NOspxに依存している。
【0117】
段階5)電気機械の動的トルク設定点を求める
本発明による方法は、車輪トルク要求が満たされるように複数の遷移条件下での熱エンジントルク補償を少なくとも1つの電気機械によって実現する。そのため、電気機械の動的トルク設定点を求める必要がある。このトルク設定点は、方程式(1)によって、以下のように求めることができる。
【0118】
【数33】
【0119】
段階6)動的トルク設定点の適用
本発明によって、ハイブリッド装置の駆動手段のトルク設定点を求めることができる。これらの設定点を熱エンジンと電気機械とに適用することによって、排出物が削減され、燃料消費も限定される。
【0120】
静的状態における最適化と遷移状態における最適化の2つの層を区分することによって、遷移最適化に対する高頻度高周波と静的な部分に対する低頻度の2つのサンプリング期間に分離することができる。動的な最適化期間は、エンジンに関する物理現象、本例の場合では、排出物の生成に対して適している。
【0121】
本方法の複数のパラメータと大きさの度合いとを表2(本戦略の調整パラメータの一覧)にまとめている。
【0122】
【表2】
【0123】
(変形例)
本発明を好ましい実施形態の場合において説明した。しかし本発明は、組み合わせ可能な異なる複数の変形例にも関連させることができる。
【0124】
段階1)トルク設定点の取得
静的トルク設定点は、特にハイブリッド駆動装置にエネルギースーパバイザが備わっていない実施形態においては、静的または疑似静的な種類のエネルギースーパバイザからの要求ではなく自動車のドライバの要求に直接起因していてもよい。
【0125】
段階2)NOx排出モデルの構成
熱エンジンに排気ガス再循環回路が備わっていない場合、エンジン回転数とシリンダ温度だけに依存している反転可能なNOx排出モデル
【0126】
【数34】
【0127】
を用いることが可能である。このシリンダ温度は熱エンジントルク設定点(
【0128】
【数35】
【0129】
は有効なまま)の関数である。好ましい実施形態では、このNOx排出モデルはエンジンテストベンチ上での実験試験に関連させることによって得られた半経験的モデルである。たとえば、方程式(4)は、吸気マニフォールド内の燃焼気体分率がゼロであると仮定することによって書き直すことが可能である。この場合、次の式を得る。
【0130】
【数36】
【0131】
段階3)NOx排出設定点の計算
NOx排出減衰率を求めるために調整パラメータξを使用する代わりに、超過すべきではないNOx排出閾値Sを定めることが可能で、この閾値Sはどのような静的な状態に到達しようが固定したり、目標の定常動作点に依存させたりすることができる。そのため方程式NOspx≦Sを満たさなければならない。この不等式は、段階ii)で前述の実施形態の方程式(3)の代わりに導入される。この閾値は、排出物に関する施行されている法律によって設定することができる。
【0132】
段階4)ディーゼルエンジン動的トルク設定点を導き出す
ディーゼルエンジンに排気ガス再循環回路が備わっていないときには、ディーゼルエンジン動的トルク設定点
【0133】
【数37】
【0134】
と、そして
【0135】
【数38】
【0136】
を導き出すように、NOx排出モデル
【0137】
【数39】
【0138】
が反転される。
【0139】
段階5)電気機械の動的トルク設定点を求める
電気機械の能力(動作範囲)を考慮した他の種類の補償を本発明の制御方法において使用することができる。例えば、電気機械の動的トルク設定点Tspmotが電気機械によって許容される最大トルクを超える場合、電気機械のトルク設定点は、この最大トルクに設定され、それから熱エンジンの動的トルク設定点Tspengが電気機械の動的トルク設定点の変化に動的トルク設定点Tspengを適合させることによって再計算される。したがってハイブリッド駆動装置の複数の構成要素が最適に使用されるが、排出物削減は最適ではない。
【0140】
応用例
この部分で示す結果は、パラレル構成のディーゼルハイブリッド乗り物のシミュレーションから得られる。ディーゼルエンジンには燃焼気体再循環装置が備わっている。熱エンジンモデルは排出物、特にNOx排出物を予測可能な物理モデルである。そのようなモデルは、例えば、以下の文献に記載されている。
R.Lebas、G.Mauvio、F.Le BerrおよびA.Albrecht,、「A phenomenological approach to model diesel engine combustion and in−cylinder pollutant emissions adapted to control strategy(制御戦略に適合しているモデルディーゼルエンジン燃焼とシリンダ内汚染物質排出物に対する現象的アプローチ)」、Proceedings of the IFAC workshop on engine and powertrain control, simulation and modeling、リュエイユ=マルメゾン、フランス、2009年11月30日〜12月2日
このモデルは、ユーロ6ディーゼルエンジン上で実施された試験から較正された。過渡条件下における排出物制限の戦略が、原理が最適制御に基づいている静的エネルギースーパバイザに結合されている。これは前述の文献に示されている。
【0141】
O.Grondin、L.Thiboult、Ph.Moulin、A.Chasse、およびA.Sciorretta、「Energy Management Strategy for Diesel Hybrid Electric Vehicle(ディーゼルハイブリッド電気乗り物のエネルギー管理戦略)」、Proceedings of the 7th IEEE vehicle Power and Propulsion Conference、合衆国、シカゴ、2011年9月6〜9日。
【0142】
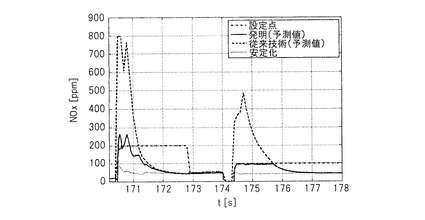
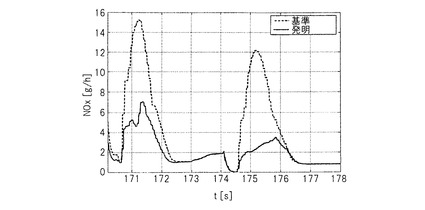
図8aから8fは、制御方法が作動しているFTP駆動サイクルの部分を示している。具体的には、先ず、複数の定常動作点は修正されていないことが示されている。他方、過渡状態において、熱エンジンのトルクは制限されている(図8a)。制限は吸気部分の位置で燃焼気体分率の設定点と予測との間に大きな違いがある過程で動作する(図8c)。この場合、内部NOxモデルは、定常状態における予測レベルを大きく超過することを予測する。トルク分布は変化しており、電気機械は熱エンジン動力学を制限できるようにする(図8b))。これらの過程の間に出現する複数の排出のピーク(図8f))が大幅に減少する。排出物のピークの減少はシリンダ内の温度の制限に起因していることがわかる(図8d))。実際に、この量は、運動学的なNOx生成機構において非常に重要である。これらの結果は、NOx排出物の生成を左右する複数の物理量をエネルギースーパバイザにおいて考慮することが良好な結果につながることを示している。
【0143】
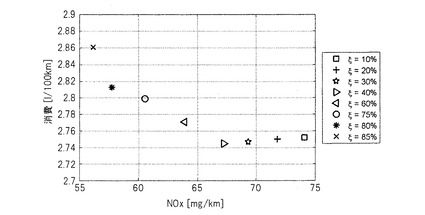
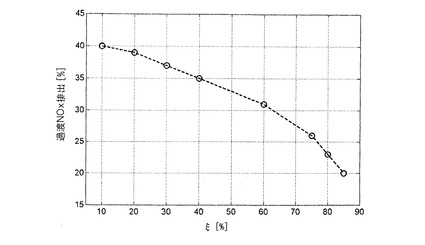
図9は、FTPドライビングサイクルにおいて、これらのシミュレーションについて調整パラメータξの値を走査させて得られるハイブリッド乗り物消費とNOx排出物とを示している。これらの結果は、乗り物の消費を変えずにNOx排出物の値を減少させることができるようにするこのパラメータの複数の値を見つけることができることを示している。これは、ξが10%と40%との間にある場合である。大きい値については、排出物は連続して減少するが、消費は際だって増加する可能性がある。この場合、パラメータξによって、NOx排出物と燃料消費との間での妥協を調整することができる。ともかくも、FTPサイクルにおける過渡NOx排出物の部分は図10に示しているようにパラメータξが増加すると減少する。
【0144】
さらに、本発明の方法は、以下の利点がある。
【0145】
遷移過程中にオンライン排出物レベルの修正を可能にする。
【0146】
関連している物理現象モデルを使用している。
【0147】
NOx排出物予測についての(相関型の)半物理モデルと空気ループ動力学モデルとによって調整パラメータの数が限定される。
【0148】
本方法は圧縮点火エンジンを備えているハイブリッド乗り物に適しているが、火花点火エンジンに適している可能性もある。
【特許請求の範囲】
【請求項1】
少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、前記ディーゼルエンジンの静的トルク設定点Tspeng,sが求められており、
前記ディーゼルエンジンの排出物を前記ディーゼルエンジンのトルクTengの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、
動的NOx排出設定点NOspxを前記NOx排出モデルと前記ディーゼルエンジンの前記静的トルク設定点Tspeng、sから計算し、
前記ディーゼルエンジンの動的トルク設定点Tspengを前記動的NOx排出設定点NOspxから導き出し、
前記電気機械の動的トルク設定点Tspmotを前記ディーゼルエンジンの前記動的トルク設定点Tspengの関数として求め、
前記ディーゼルエンジンおよび前記電気機械のそれぞれの前記動的トルク設定点を前記駆動装置に適用する、ことを特徴とする方法。
【請求項2】
前記窒素酸化物排出モデルは、ディーゼルエンジンの回転数とエンジンシリンダ内の最高温度とに依存している、請求項1に記載の方法。
【請求項3】
前記ディーゼルエンジンは、燃焼気体を前記ディーゼルエンジンのシリンダの上流の吸気マニフォールドに導く排気ガス再循環装置を備えており、前記NOx排出モデルは、前記ディーゼルエンジンの前記吸気マニフォールド内の燃焼気体分率Fest1に依存している、請求項1または2に記載の方法。
【請求項4】
NOx排出物排泄モデルは、
【数1】
で表され、
α1からα7は、前記NOxモデルの較正係数を示し、Neはディーゼルエンジン回転数を示し、
【数2】
はエンジン内の最高温度を示し、F1は、ディーゼルエンジンに排気ガス再循環回路が備わっている場合における、吸気マニフォールド内の燃焼気体分率を示し、NOxは、NOx排出物レベルを示し、F1は、前記排気ガス再循環回路が備わっていない場合、ゼロである、請求項1ないし3のいずれか1項に記載の方法。
【請求項5】
NOx排出閾値が前記ディーゼルエンジンに対して定義され、前記NOx排出設定点NOspxは前記閾値の関数として計算される、請求項1ないし4のいずれか1項に記載の方法。
【請求項6】
NOx排出削減因子ξが設定され、前記NOx排出設定点NOspxは前記削減因子ξの関数として計算される、請求項1ないし4のいずれか1項に記載の方法。
【請求項7】
前記ディーゼルエンジンの前記動的トルク設定点の前記導き出された値は、前記NOx排出モデルを逆転することによって求められる、請求項1ないし6のいずれか1項に記載の方法。
【請求項8】
前記ディーゼルエンジンの前記静的トルク設定点Tspeng,sは、エネルギースーパバイザ、特に前記ハイブリッド駆動装置に備わっている疑似静的エネルギースーパバイザによって駆動装置トルク設定点Tsppwtから求められる、請求項1ないし7のいずれか1項に記載の方法。
【請求項9】
請求項1ないし8のいずれか1項に記載の方法をコンピュータに実行させるためのプログラム。
【請求項10】
請求項1から8のいずれか1項に記載の制御方法によって制御されることを特徴とする、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置。
【請求項11】
過渡状態での該ハイブリッド駆動装置の制御は疑似静的エネルギースーパバイザに対して従属して行われる、請求項10に記載のハイブリッド駆動装置。
【請求項12】
請求項10または11に記載のハイブリッド駆動装置を有することを特徴とする、乗り物、特に自動車。
【請求項1】
少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置を制御する方法であって、前記ディーゼルエンジンの静的トルク設定点Tspeng,sが求められており、
前記ディーゼルエンジンの排出物を前記ディーゼルエンジンのトルクTengの関数として予測できる窒素酸化物(NOx)排出モデルを構成し、
動的NOx排出設定点NOspxを前記NOx排出モデルと前記ディーゼルエンジンの前記静的トルク設定点Tspeng、sから計算し、
前記ディーゼルエンジンの動的トルク設定点Tspengを前記動的NOx排出設定点NOspxから導き出し、
前記電気機械の動的トルク設定点Tspmotを前記ディーゼルエンジンの前記動的トルク設定点Tspengの関数として求め、
前記ディーゼルエンジンおよび前記電気機械のそれぞれの前記動的トルク設定点を前記駆動装置に適用する、ことを特徴とする方法。
【請求項2】
前記窒素酸化物排出モデルは、ディーゼルエンジンの回転数とエンジンシリンダ内の最高温度とに依存している、請求項1に記載の方法。
【請求項3】
前記ディーゼルエンジンは、燃焼気体を前記ディーゼルエンジンのシリンダの上流の吸気マニフォールドに導く排気ガス再循環装置を備えており、前記NOx排出モデルは、前記ディーゼルエンジンの前記吸気マニフォールド内の燃焼気体分率Fest1に依存している、請求項1または2に記載の方法。
【請求項4】
NOx排出物排泄モデルは、
【数1】
で表され、
α1からα7は、前記NOxモデルの較正係数を示し、Neはディーゼルエンジン回転数を示し、
【数2】
はエンジン内の最高温度を示し、F1は、ディーゼルエンジンに排気ガス再循環回路が備わっている場合における、吸気マニフォールド内の燃焼気体分率を示し、NOxは、NOx排出物レベルを示し、F1は、前記排気ガス再循環回路が備わっていない場合、ゼロである、請求項1ないし3のいずれか1項に記載の方法。
【請求項5】
NOx排出閾値が前記ディーゼルエンジンに対して定義され、前記NOx排出設定点NOspxは前記閾値の関数として計算される、請求項1ないし4のいずれか1項に記載の方法。
【請求項6】
NOx排出削減因子ξが設定され、前記NOx排出設定点NOspxは前記削減因子ξの関数として計算される、請求項1ないし4のいずれか1項に記載の方法。
【請求項7】
前記ディーゼルエンジンの前記動的トルク設定点の前記導き出された値は、前記NOx排出モデルを逆転することによって求められる、請求項1ないし6のいずれか1項に記載の方法。
【請求項8】
前記ディーゼルエンジンの前記静的トルク設定点Tspeng,sは、エネルギースーパバイザ、特に前記ハイブリッド駆動装置に備わっている疑似静的エネルギースーパバイザによって駆動装置トルク設定点Tsppwtから求められる、請求項1ないし7のいずれか1項に記載の方法。
【請求項9】
請求項1ないし8のいずれか1項に記載の方法をコンピュータに実行させるためのプログラム。
【請求項10】
請求項1から8のいずれか1項に記載の制御方法によって制御されることを特徴とする、少なくとも1つの電気機械と少なくとも1つのディーゼルエンジンからなるハイブリッド駆動装置。
【請求項11】
過渡状態での該ハイブリッド駆動装置の制御は疑似静的エネルギースーパバイザに対して従属して行われる、請求項10に記載のハイブリッド駆動装置。
【請求項12】
請求項10または11に記載のハイブリッド駆動装置を有することを特徴とする、乗り物、特に自動車。
【図1a】

【図1b】
【図1c】
【図1d】
【図2a】
【図2b】
【図3】
【図4】

【図5a】

【図5b】

【図6】
【図7】

【図8a】

【図8b】
【図8c】
【図8d】
【図8e】
【図8f】
【図9】
【図10】
【図1b】
【図1c】
【図1d】
【図2a】
【図2b】
【図3】
【図4】
【図5a】
【図5b】
【図6】
【図7】
【図8a】
【図8b】
【図8c】
【図8d】
【図8e】
【図8f】
【図9】
【図10】
【公開番号】特開2013−107631(P2013−107631A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−249129(P2012−249129)
【出願日】平成24年11月13日(2012.11.13)
【出願人】(591007826)イエフペ エネルジ ヌヴェル (261)
【氏名又は名称原語表記】IFP ENERGIES NOUVELLES
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成24年11月13日(2012.11.13)
【出願人】(591007826)イエフペ エネルジ ヌヴェル (261)
【氏名又は名称原語表記】IFP ENERGIES NOUVELLES
【Fターム(参考)】
[ Back to top ]