
乗り物用表示制御装置及びプログラム
【課題】乗り物の計器を表す計器画像を表示する計器表示部に表示している画像の表示位置を変化させるときに、ユーザに画像の表示位置の変化への心構えを促すことができる乗り物用表示制御装置等を提供する。
【解決手段】CPU101aは、車両情報を取得する。CPU101aは、取得した車両情報を表す画像を計器表示部109内の表示領域に表示する第1の処理と前記表示領域を変化させる第2の処理とを行う。CPU101aは、表示領域を変化させる前に、表示領域を変化させるまでの残り時間を計器表示部109に更に表示する。
【解決手段】CPU101aは、車両情報を取得する。CPU101aは、取得した車両情報を表す画像を計器表示部109内の表示領域に表示する第1の処理と前記表示領域を変化させる第2の処理とを行う。CPU101aは、表示領域を変化させる前に、表示領域を変化させるまでの残り時間を計器表示部109に更に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、乗り物用表示制御装置及びプログラムに関する。
【背景技術】
【0002】
例えば、特許文献1には、デジタル式の速度計を表す画像と、指針式のアナログ速度計を表す画像とを表示する第1表示モードから、デジタル式の速度計を表す画像と、車両の走行経路を表す画像とを表示する第2表示モードへ表示を切り換える車両用メーターユニットが開示されている。この車両用メーターユニットは、第1表示モードから第2表示モードへ表示を切り換える場合に、デジタル式の速度計を表す画像の位置を、第1表示モードにおける表示位置から、第2表示モードで走行経路を表す画像を表示する位置と重ならない表示位置へ変化させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−179240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された車両用メーターユニットでは、ユーザ(運転者)が表示画面を見ている最中であっても画像の位置の変化が起こる場合があり、このような場合、ユーザにとっては突然画像の位置の変化が起こることになるので、ユーザの心構えが出来ていないタイミングで、画像の位置の変化が起こることになってしまっていた。
【0005】
本発明は、このような点に鑑みてなされたものであり、乗り物の計器を表す計器画像を表示する計器表示部に表示している画像の表示位置を変化させるときに、ユーザに画像の表示位置の変化への心構えを促すことができる乗り物用表示制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の第一の観点に係る乗り物用表示制御装置は、
乗り物の計器を表す計器画像を表示可能な計器表示部を制御する乗り物用表示制御装置であって、
前記乗り物の情報である乗り物情報を取得する情報取得手段と、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段と、を備え、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする。
【0007】
また上記目的を達成するため、本発明の第二の観点に係るプログラムは、
乗り物の計器を表す計器画像を表示可能な計器表示部を制御するコンピュータを、
前記乗り物の情報である乗り物情報を取得する情報取得手段、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段、として機能させ、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、表示部に表示している画像の表示位置を変化させるときに、ユーザに画像の表示位置の変化への心構えを促すことができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態に係る表示装置の一構成例を示すハードウェア構成図である。
【図2】本発明の実施の形態に係る表示装置が実行する表示制御処理の一例を表すフローチャートである。
【図3】速度計画像及び回転数計画像を表示する計器表示部の表示例を表す図である。
【図4】速度計画像及び回転数計画像に加えて、ナビ画像を表示する計器表示部の表示例を表す図である。
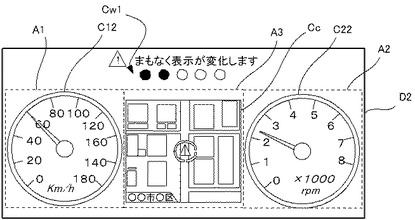
【図5】ナビ画像の表示位置を変更する直前の計器表示部の表示例を表す図である。
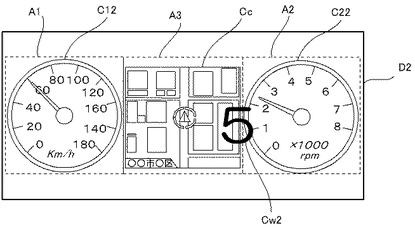
【図6】ナビ画像の表示位置を変更する直前の計器表示部の表示例を表す図である。
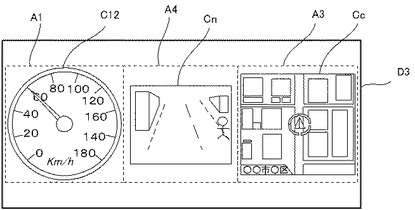
【図7】画面変化後の計器表示部の表示例を表す図である。
【発明を実施するための形態】
【0010】
本発明に係る一実施形態について図面を参照して説明する。なお、本発明は下記で説明される実施形態(図面の記載内容も含む)によって限定されるものではない。下記で説明される実施形態に変更(構成要素の削除も含む)を加えることができるのはもちろんである。また、以下の説明では、実施形態の理解を容易にするために、重要でない公知の技術的事項の説明を適宜省略する。
【0011】
本実施形態に係る図1の乗り物用表示制御装置100は、自動車内(乗り物内)に設置される計器装置である。乗り物用表示制御装置100は、設置される自動車(以下、自車という。)の情報である車両情報(乗り物情報)を表す画像(以下、部分画像という。)を組み込んだ画像(以下、全体画像という。)を計器表示部109に表示する。部分画像は、計器表示部109の表示画面の一部(全体画像の一部)である表示領域内に表示される。表示領域が変化(移動、拡大、縮小、消滅等)すると、それにともなって、部分画像も変化(移動、拡大、縮小、消滅等)する。
【0012】
車両情報は、自車の運転状況を表す情報である。車両情報としては、計器で表示される、自車の状態を表す情報である計器情報、ユーザ(運転者)による運転に補助的に参照される、自車の置かれた状況を表す情報である補助情報等がある。
【0013】
計器情報は、例えば、自車の走行速度(つまり、車速)、自車のエンジンの回転数で表されるエンジン出力(以下単に、車両出力という)、自車が有する燃料の残量、及び自車が有するギアの位置(つまり、ギアポジション)等の自車の状態についての検出値(計測値等)の情報である。また、補助情報としては、緯度経度等で表される自車の位置や、自車の周囲の風景等の自車の位置に関する情報がある。
【0014】
計器情報を表す部分画像(以下、計器画像という。)は、前記の検出値を表す計器の画像である。補助情報を表す部分画像(以下、補助画像という。)は、地図上に自車の位置を示すことによって、緯度経度等で表される自車の位置を表す画像(所謂、カーナビゲーションシステムにおけるナビ画像)や、自車に取り付けられた暗視カメラによって自車の周囲の風景を撮影することによって自車の位置を表す暗視画像(所謂、ナイトビジョンシステムにおけるナイトビュー画像)等である。
【0015】
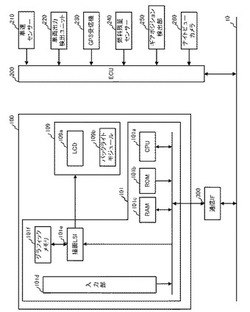
乗り物用表示制御装置100は、図1に示すように、表示制御部101と計器表示部109と、を含む。計器表示部109の表示を制御する表示制御部101は、CPU(Central Processing Unit)101a、ROM(Read Only Memory)101b、RAM(Random Access Memory)101c、入力部101d、描画LSI(Large Scale Integration)101e、及びグラフィックメモリ101fを備える。
【0016】
CPU101aは、ROM101bに格納されたプログラムに従った処理を実行することで、乗り物用表示制御装置100を構成する各部を制御し、後述の処理を行う。例えば、CPU101aは、前記のプログラムに従って、計器表示部109に表示させる全体画像の画像データを生成し、生成した画像データを描画LSI101eへ出力する。
【0017】
CPU101aは、ECU(Engine Control Unit)200と通信インターフェース(以下単に、通信IFという)300及びシリアルバス10を介して接続され、CPU101aは、これらを介してECU200と通信を行う。
【0018】
ROM101bは、前記のプログラムの他、各種画像を表すデータ、地図データ、及びフォントデータ等のCPU101aが使用するデータを記憶する。
【0019】
RAM101cは、処理中にCPU101aが使用するデータを一時的に記憶するメインメモリとして機能する。
【0020】
入力部101dは、ユーザからの各種操作を受け付ける操作ボタン、計器表示部109に配置されたタッチパネル等を備える。入力部101dは、ユーザからの操作を受け付け、受け付けた操作に応じた内容の操作信号を生成してCPU101aに出力する。
【0021】
描画LSI101eは、CPU101aから供給される画像データを受け取ると共に、受け取った画像データをグラフィックメモリ101f上に展開する。その後、描画LSI101eは、展開した画像データを、計器表示部109に出力し、計器表示部109は画像データが表す画像を表示する。このように、描画LSI101eは、画像を計器表示部109に描画する機能を有し、CPU101aは描画LSI101eを用いて計器表示部109に画像を表示する。
【0022】
計器表示部109は、例えば、TFT(Thin Film Transistor)型のLCD(Liquid Crystal Display)109aと、LCD109aの背後に設置され、LCD109aを照光するバックライトモジュール109bとを備え、描画LSI101eによって出力された全体画像をLCD109aとバックライトモジュール109bとを用いて表示する。
【0023】
なお、ECU200は、車速センサー210、車両出力検出ユニット220、燃料残量センサー240、及びギアポジション検出部250に接続され、それぞれのセンサー及び検出部が検出した車速、車両出力、燃料の残量、及びギアポジションを表すアナログ信号をそれぞれのセンサー及び検出部から取得する。その後、ECU200は、A−D(Analog−to−Digital)変換器を用いて、アナログ信号をデジタルデータに変換した後に、変換したデータを、例えば、CAN(Controller Area Network)通信によって乗り物用表示制御装置100へ送信する。これらのデジタルデータは、計器情報を表すデータに該当する。また、ECU200は、全地球測位システム(Grobal Positioning System、以下GPS)受信機230、及び暗視カメラであるナイトビューカメラ260に接続されている。ECU200は、GPS受信機230が検出した自車の位置を表す自車位置データをGPS受信機230から取得するとともに、ナイトビューカメラ260が撮影した暗視画像(つまり、ナイトビュー)を表す暗視画像データをナイトビューカメラ260から取得し、取得した各データを乗り物用表示制御装置100へ送信する。これらのデータは、補助情報を表すデータに該当する。
【0024】
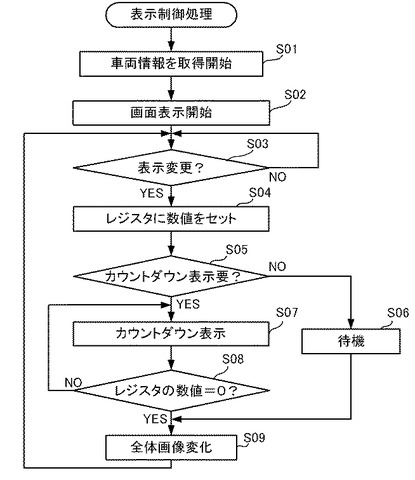
次に、乗り物用表示制御装置100のCPU101aが行う処理を説明する。図1のCPU101aは、図2に示すような表示制御処理を実行する。まず、バッテリーからイグニッションの両端子に電圧が印加されると、乗り物用表示制御装置100が始動する。乗り物用表示制御装置100のCPU101aは、この始動によって、表示制御処理を開始する。なお、以下の処理で必要なデータは、ROM101bに予め記録されており、CPU101aは、必要に応じて、ROM101bから必要なデータを取得して使用し、下記の処理を行うものとする。
【0025】
なお、下記の説明では、図3の全体画像D1が表示され、その後に図4の全体画像D2が表示され、そして、図7の全体画像D3が表示される場合を具体例とする。
【0026】
CPU101aは、各種車両情報を取得することを開始する(ステップS01)。例えば、乗り物用表示制御装置100が始動すると、まず、CPU101aは、図1のECU200に対して各種車両情報の送信要求を行い、ECU200に各種車両情報を表すデータを送信させる。このようにして、CPU101aは、ECU200から、各種の計器情報、補助情報を表すデータを取得することを開始する。以降、CPU101aは、表示制御処理中、定期的に、各種車両情報を表すデータを取得し続ける。
【0027】
次に、CPU101aは、取得した各種車両情報のうちの予め定められている車両情報を表す画像を1以上組み込んだ全体画像を計器表示部109に表示させることを開始する(ステップS02)。
【0028】
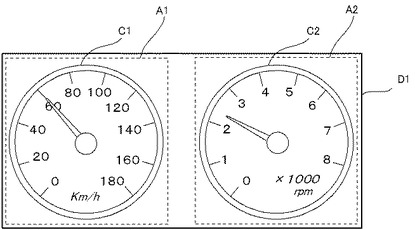
例えば、CPU101aは、車速を表す計器画像である速度計画像(スピードメータの画像)C1と、エンジンの回転数を表す計器画像である車両情報を示す回転数計画像(タコメータの画像)C2と、を含む全体画像D1の画像データを生成し、描画LSI101eに供給し、前記全体画像D1を計器表示部109に表示させる(図3参照)。
【0029】
具体的には、CPU101aは、ECU200から取得した車速を示す指針を含む速度計画像C1のデータを生成する。また同様に、CPU101aは、ECU200から取得したエンジンの回転数を示す指針を含む回転数計画像C2のデータを生成する。そして、CPU101aは、速度計画像C1のデータと回転数計画像C2のデータとを含む図3のような全体画像D1の画像データを生成する。図3のように、全体画像D1は、表示領域A1に表示された速度計画像C1と、表示領域A2に表示された回転数計画像C2とを含み、両者は水平方向に隣接している。CPU101aは、このような処理によって、全体画像D1の画像データを生成し、描画LSI101eに供給し、全体画像D1を計器表示部109に表示する。
【0030】
ユーザは、図3の全体画像D1を見て、速度計画像C1の指針が指し示す方向や回転数計画像C2の指針が指し示す方向を確認することによって、車両状態を把握することができる。なお、速度計画像C1のような車両速度を表示する画像については、他に車両速度を表示する表示装置がない限り、車両用表示装置としての制約上、いかなる場合においても必ず表示させる必要がある。
【0031】
なお、CPU101aは、これ以降、ステップS03以降の処理と並行して、ECU200から定期的に供給される車両情報のうち、現在表示中の部分画像(以降の処理で新たに表示される部分画像も含む。)の表示に使用される車両情報を用いて、上記の手順で全体画像の新たなデータを生成し、描画LSI101eに供給する処理をリアルタイムで繰り返す(画像の更新)。これによって、計器表示部109に表示されている部分画像は、車両情報の内容の変化に従って、リアルタイムで変化するので、車両情報がリアルタイムで表示される。
【0032】
全体画像D1においては、速度計画像C1の指針や回転数計画像C2の指針が、画像上で、実際の車速や回転数の変化に応じてリアルタイムに変位(回転)する。これによって、全体画像D1において、車速及び回転数が、それぞれ、速度計画像C1及び回転数計画像C2によってリアルタイムで表示される。
【0033】
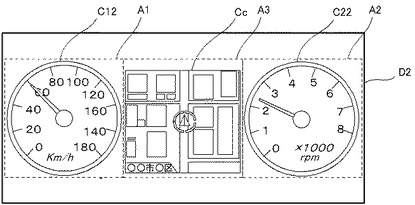
全体画像D2においては、速度計画像C12の指針や回転数計画像C22の指針に加えて、ナビ画像Ccの、地図上の自車の位置が、画像上で、実際の自車の位置(緯度及び経度)の変化に応じてリアルタイムに変化する。これによって、全体画像D2において、地図上の自車の位置が、ナビ画像Ccによってリアルタイムで表示される。
【0034】
全体画像D3においては、速度計画像C12の指針やナビ画像Ccの自車の位置に加えて暗視画像Cnが、実際の自車の周囲の風景の変化に応じてリアルタイムに変化する。これによって、全体画像D3において、自車の周囲の風景が暗視画像によってリアルタイムで表示される。
【0035】
次に、CPU101aは、現在表示されている全体画像を変化させる必要があるかを判別する(ステップS03)。例えば、ユーザが、新たに表示させる部分画像を指定する操作(ナビ画像を表示させる操作や、暗視画像を表示させる操作)や、部分画像を移動させる操作、表示を終了させる部分画像を指定する操作や、拡大する部分画像を指定する操作や、縮小する部分画像を指定する操作等を、入力部101dに対して行った場合、これらの操作に応じて、全体画像を変化させる必要がある。このため、例えば、CPU101aは、前記操作に応じた操作信号が入力部101dから供給された場合に、全体画像を変化させる必要があると判別し(ステップS03;YES)、前記操作に応じた操作信号が供給されていない場合に、全体画像を変化させる必要がないと判別する(ステップS03;NO)。
【0036】
CPU101aは、全体画像を変化させる必要がないと判別した場合(ステップS03;NO)には、再びステップS03の処理を行い、全体画像を変化させる必要があるまで待機する。
【0037】
一方、CPU101aは、全体画像を変化させる必要があると判別した場合(ステップS03;YES)には、内部に備えるカウントダウン用レジスタに所定の数値(正の整数)をセットする(ステップS04)。以降、CPU101aは、一秒経過する毎に、カウントダウン用レジスタの数値から1を差し引く。例えば、カウントダウン用レジスタにセットされる数値は5であり、5秒後に0になる。例えば、現在表示されている画像が全体画像D1である場合には、新たに表示させる部分画像として、ナビ画像Ccが指定される操作が行われ、現在表示されている画像が全体画像D2である場合には、新たに表示させる部分画像として、暗視画像Cnが指定される操作が行われたものとする。
【0038】
CPU101aは、ステップS04の後、カウントダウンを表示するかの判別を行う(ステップS05)。本実施形態では、補助画像を移動させる場合に、カウントダウンを表示する。補助画像を移動させる場合は、例えば、計器表示部109に補助画像が表示されている状態で、ユーザが、新たに表示させる部分画像を指定する操作や、補助画像を移動させる操作や、表示を終了させる部分画像として補助画像を指定する操作や、拡大する部分画像として補助画像を指定する操作や、縮小する部分画像として補助画像を指定する操作等を入力部101dに対して行った場合である。つまり、このような場合、前記の各操作に応じて補助画像の表示領域を変化(移動、消去、縮小、又は拡大)させる必要がある。
【0039】
CPU101aは、ステップS03でYESと判別された操作信号のうち、前記各操作に応じた操作信号が供給されている場合、カウントダウンを表示すると判別し(ステップS05;YES)、その他の場合には、カウントダウンを表示しないと判別する(ステップS05;NO)。例えば、新たに表示させる部分画像として、現在表示されている画像が全体画像D1である場合に、ナビ画像Ccが指定される操作が行われた場合には、ステップS05でNOと判別され、現在表示されている画像が全体画像D2である場合に、暗視画像Cnが指定される操作が行われた場合には、ステップS05でYESと判別される。
【0040】
CPU101aは、カウントダウンを表示しないと判別した場合には(ステップS05;NO)、カウントダウン用レジスタの数値が0になるまで待機し(ステップS06)、待機後、ステップS09の処理を行う。
【0041】
CPU101aは、カウントダウンを表示すると判別した場合には(ステップS05;YES)、カウントダウン用レジスタの数値に応じた画像(カウントダウン画像)を含む全体画像を計器表示部109に表示し(ステップS07)、カウントダウン用レジスタの数値が0であるかを判別し(ステップS08)、カウントダウン用レジスタの数値が0でない場合には(ステップS08;NO)、再びステップS07の処理を行う。
【0042】
具体的には、CPU101aは、上記の画像の更新のために全体画像の画像データを生成するときに、カウントダウン画像を含む全体画像の画像データを生成し、描画LSI101eに供給して、全体画像を計器表示部109に表示させる。CPU101aは、このような処理を、カウントダウン用レジスタの数値が0になるまで、つまり、ステップS08でYESを判別するまで繰り返し行う。これによって、カウントダウン画像が、全体画像上で、リアルタイムで表示される。カウントダウン画像は、カウントダウン用レジスタの数値に応じた画像であるので、1秒毎に変化する。CPU101aは、例えば、図5及び図6のような全体画像D2を表示する。カウントダウン画像は、例えば、カウントダウン用レジスタの数値を図形で表したものであったり(例えば、図5のカウントダウン画像Cw1参照)、カウントダウン用レジスタの数値を数字で表したものであったりする(例えば、図6のカウントダウン画像Cw2参照)。カウントダウン画像Cw1では、左から、1秒ごとに黒丸が右から順に白丸に変化する。カウントダウン画像Cw2では、数字が1秒ごとに1ずつ減っていく。
【0043】
カウントダウン用レジスタの数値が0である場合(ステップS08;YES)、CPU101aは、ステップS09の処理を行う。CPU101aは、ステップS09において、入力部101dが受け付けているユーザからの操作(上記ステップS03参照)に応じて、全体画像を変化させる。CPU101aは、ユーザが指定する部分画像を現在の全体画像に新たに含ませたり(このとき、現在の部分画像は、消去又は移動等させられる。)、ユーザが指定する部分画像(つまり、この部分画像の表示領域)を移動、消去、拡大又は縮小したりする。つまり、カウントダウン用レジスタの数値は、全体画像が変化するまでの残り時間(秒)を示すものである。
【0044】
全体画像D1が表示されている場合に、CPU101aが、操作信号として、ナビ画像の表示を指定する操作信号を取得している場合、CPU101aは、カウントダウン用レジスタの数値が0になると(ステップS05の後)、ECU200から供給される自車位置データに基づいて、自車の位置を地図上で表すナビ画像Cc(図4参照)のデータを生成する。このとき、ROM101bに記録されている地図データ等が使用される。CPU101aは、速度計画像C12の画像データ、回転数計画像C22の画像データ、ナビ画像Ccの画像データ等に基づいて、全体画像D1から全体画像D2への遷移を表現するアニメーション画像を構成する連続的な複数の画像をそれぞれ表す複数の画像データを生成し、描画LSI101eに供給し、アニメーション画像を計器表示部109に表示する。そして、CPU101aは、最終的に、全体画像D2の画像データを生成し、全体画像D2を計器表示部109に表示する。
【0045】
例えば、CPU101aは、全体画像D1上で、速度計画像C1の表示領域A1及び回転数計画像C2の表示領域A2を、各々水平方向に離れるように移動させながら縮小し、その間の位置に形成される表示領域A3にナビ画像Ccを表示する。これにより速度計画像C1及び回転数計画像C2が視認性が低下しない程度に縮小しながら移動し(図4の速度計画像C12及び回転数計画像C22)、その間の位置にナビ画像Ccが新たに表示され、最終的に、速度計画像C12と回転数計画像C22と両者の間に位置するナビ画像Ccとを含む全体画像D2が表示される(図4参照)。
【0046】
全体画像D2が表示されている場合に、CPU101aが、操作信号として、暗視画像の表示を指定する操作信号を取得している場合、CPU101aは、カウントダウン用レジスタの数値が0になると(つまり、カウントダウン後)、CPU101aは、ECU200から供給される暗視画像の画像データと、速度計画像C12の画像データ、ナビ画像Ccの画像データ等に基づいて、全体画像D2から全体画像D3への遷移を表現するアニメーション画像を構成する連続的な複数の画像をそれぞれ表す複数の画像データを生成し、描画LSI101eに供給し、アニメーション画像を計器表示部109に表示する。なお、アニメーション画像では、カウントダウン画像は含まれない。そして、CPU101aは、最終的に、全体画像D3の画像データを生成し、全体画像D3を計器表示部109に表示する。
【0047】
例えば、CPU101aは、全体画像D2上で、表示領域A3を、向かって右方向に水平移動させ、その間の位置に形成される表示領域A4に暗視画像を表示する。これによりナビ画像Ccが水平移動し、その間の位置に暗視画像Cnが新たに表示され、最終的に、速度計画像C12とナビ画像Ccと両者の間の暗視画像Cnを含む全体画像D3が表示される(図7参照)。なお、このとき、回転数計画像C2は消去されている。このように、新たな部分画像を表示する場合には、予め設定されたルールに基づいて、所定の部分画像を消去してもよい。
【0048】
CPU101aは、その後、ステップS03の処理に戻る。本表示制御処理は、例えば、バッテリーからイグニッションの両端子への電圧が印加されなくなると終了する。
【0049】
なお、表示領域A1、表示領域A2、表示領域A3、及び表示領域A4を表す破線は、計器表示部109には表示されない。
【0050】
本実施形態では、上記の構成によって、CPU101aは、補助画像を表示した表示領域を変化(移動、拡大、縮小、消去を含む)させるが、補助画像を表示した表示領域を変化させる前に、補助画像を表示した表示領域を変化させるまでの残り時間を計器表示部109に更に表示する(カウントダウン表示)。残り時間は、上記のように、数字で表示されるか、図形等で表される。残り時間は、表示領域を変化させた後を基準とした時間でもよいし、表示領域を変化させる始点を基準とした時間でもよい。
【0051】
本実施形態では、表示領域を変化させるまでの残り時間を表示することによって、あとどの位の残り時間で補助画像が変化(移動、拡大、縮小、消去を含む)するかを把握することができ、区切りのよい箇所までを一時的に覚えるなど、補助画像の変化に備えることができる。このように、本実施形態では、計器表示部109に表示している画像の表示位置を変化させるときに、運転で忙しいユーザに画像の表示位置の変化への心構えを促すことができる。
【0052】
なお、カウントダウン画像Cw1における白丸は、カウントダウン開始からの経過時間を、黒丸は、画面の変化までの残り時間を表す。カウントダウン画像Cw1は、これら記号の組み合わせによって、ユーザに対して画面遷移までの残り時間を報知し、画面遷移に対する準備を促すものである。カウントダウン画像Cw2におけるアラビア数字は、画面遷移までの残り時間を表すものであり、これによって、残り時間をユーザは把握しやすい。また、カウントダウン画像Cw1を表示するときのように、カウントダウン画像Cw1とともに、画面遷移の予告を、文章や記号等で表示することによって、ユーザは画面遷移があることを把握しやすい。
【0053】
ところで、画像によっては突然の変化があっても、ユーザは困らないことがある。例えば、画像が計器画像である場合、このような画像は内容を一見して把握できるので、画像が突然移動等しても、ユーザはそれほど困らない。一方で、このような画像の変化する場合に、残り時間を表示するとかえって煩わしい。また、補助画像は、内容を理解するのに、ある程度の時間がかかる。このため、画像が突然移動等すると、ユーザは補助画像を追わなければいけないので、困惑する。このため、補助画像を移動等させる場合には、カウントダウン表示をして、ユーザに心構えを促すことが望ましい。
【0054】
そこで、上記実施形態では、上記構成によって、CPU101aは、表示領域を変化させる画像が予め定められた第1の画像(本実施形態では、補助画像)である場合にカウントダウン表示を行い、表示領域を変化させる画像が予め定められた第2の画像(本実施形態では、計器画像)である場合にカウントダウン表示を行わない。このようにすることで、必要な場合にのみ、カウントダウン表示を行うことができ、ユーザーの利便性を良くすることができる。特に、補助画像は、ナビ画像等の地図を含む画像である場合に、このような効果がある。なお、第1の画像は、補助情報に限られない。また、第2の画像は、計器画像に限られない。また、第2の画像の表示領域を変化させるときには、ステップS05の処理を行わなくても良い。つまり、すぐに、第2の画像の表示領域を変化させてもよい。
【0055】
また、上記カウントダウン画像Cw2のように、表示領域及びその中の画像(ナビ画像Cc)を移動させる場合に、前記残り時間を、移動させる画像を基準として、この画像を移動させる方向の位置に表示すると、移動させる画像のこれからの移動方向が分かるので、ユーザにとっての利便性が良い。特に、移動までの残り時間と、移動方向とが一度に把握されるので、ユーザにとっての利便性が良い。なお、表示する残り時間は、移動させる画像内であっても、画像外であっても、その中間であってもよい。画像外の場合には、前記残り時間を、移動させる画像の近傍に表示することが望ましい。これによって、残り時間と、移動させる画像との関係が分かりやすい。また、前記残り時間の表示位置は、移動させる画像の中心を基準として方向にすると、移動方向が分かりやすい。
【0056】
なお、上記実施形態では、速度計画像や回転数計画像として、同心円内部に記載された目盛りと指針画像との組み合わせによって車両情報を把握可能なアナログ式指針画像を例にして説明したがこれに限るものではなく、セグメント調数字や、棒グラフといった表示でもよい。
【0057】
また補助画像は、上記の画像に限られない。補助画像は、車両の故障状態等を報知するメッセージなど、表示された情報をユーザが短時間で読み取ることが困難な画像であればよく、補助情報は、そのような画像によって表される情報であればよい。
【0058】
また、上記のように、残り時間の表示とともに、全体画像の変化の移り変わりを、アニメーション画像で順次表示することによって、ユーザは、心構えをした後で、画像の変化を追うことができ、画像の変化を非常に追いやすくなり、ユーザにとって利便性がよい。
【0059】
また、表示制御部101は、ハードディスク等の他の不揮発性記憶装置を、ROM101bに加えて、又は、ROM101bの代わりに備え、この他の不揮発性記憶装置が、ROM101cが記憶するプログラムやデータの少なくとも一部を記憶してもよい。
【0060】
また、計器画像の表示領域を変化させるときに、残り時間の表示を行っても良い。
【0061】
CPU101aは、残り時間の表示に伴って、図示しない音声出力装置に「まもなく画面が切り替わります」といった、表示領域の変化を報知するメッセージを出力し、視覚的方法に加えて聴覚的方法によって、表示領域の変化のユーザへの認知を促してもよい。音声出力装置には、例えば自車内に搭載されたスピーカを用いる。
【0062】
また、音声出力装置に出力するメッセージは、表示領域が変化する画像が、変化後に引き続き表示されるか否かによって切り替えてもよい。即ち、当該画像が、表示位置を変えて(例えば左へ)引き続き表示される場合には、例えば「ナビゲーション画像が左へ移動します」という、画像が引き続き表示される旨のメッセージを音声出力装置に出力する。一方、当該画像が、変化後に画面に表示されない場合には、例えば「ナビゲーション画像は○○ボタンにより再表示可能です」という、画像が引き続き表示されない旨のメッセージを音声出力装置に出力する。これによって、ユーザの利便性が向上する。
【0063】
また残り時間の表示は、例えば、セグメント調数字や、棒グラフ、画面の点滅周期によってもよい。
【0064】
また残り時間の表示の際に、表示領域が移動する方向を矢印で示してもよいし、上・下・左・右などの方向を示す文字で表示してもよい。これによっても、ユーザは画像の移動方向が分かるので、ユーザにとって利便性が良い。
【0065】
また図5においては、画面遷移予告画像Cw1の表示位置をナビゲーション画像Ccの上部とした場合を例に説明したがこれに限るものではない。状況に応じて上下左右、或いはナビゲーション画像Ccとのアルファブレンディングなど、種々の画像処理手法を用いてもよい。
【0066】
また、計器表示部109は、計器画像を一時的に全く表示しなくてもよい。
【0067】
また、表示領域を変化させる契機(残り時間の表示を始める計器)は、ユーザからの操作によらず、自動であってもよい。例えば、ナビ画像を全体画像の中央に表示している時に、自車が所定の交差点に近づいているとする。この場合に、CPU101aは、ナビゲーションシステム上で、自車の位置がその交差点から所定の距離内に移動したと判別したときから所定時間後に、ナビ画像の表示領域をに移動させるとともに、その交差点の拡大画像を中央に表示するとする。この場合、CPU101aは、前記の判別を契機として、残り時間を表示してもよい。
【0068】
また、本発明に係る乗り物用表示制御装置は、計器表示部109を備えず、外部の計器表示部を制御する表示制御装置として機能してもよい。
【0069】
なお、CPU101aは、各種車両情報のうち、全体画像の表示に必要な車両情報のみを取得してもよい。この場合、CPU101aは、必要な車両情報の取得要求をECU200に供給し、ECU200は、この取得要求に基づいて、必要な車両情報をCPU101aに供給する。このような場合、ECU200は、車両情報の供給に不必要なセンサ、検出部、装置等については、動作させなくても良い。
【0070】
また、本発明に係る乗り物用表示制御装置は、船舶、二輪車、飛行機等の他の乗り物用であってもよい。運転は、飛行機についての操縦等の表現を含む。
【0071】
CPU101aを動作させる上記プログラムの配布方法は任意であり、例えば、メモリカード、CD−ROM、又はDVD−ROMなどの記録媒体に格納して配布できる他、インターネットなどの通信媒体を介して配布することもできる。このようにして、上記プログラムをコンピュータにインストールすることによって、コンピュータを上記の乗り物用表示制御装置として機能させてもよい。
【符号の説明】
【0072】
100 乗り物用表示制御装置
101 表示制御部
101a CPU
101b ROM
101c RAM
101d 入力部
101e 描画LSI
101f グラフィックメモリ
109 計器表示部
109a LCD
109b バックライトモジュール
200 ECU
210 車速センサー
220 車両出力検出ユニット
230 GPS
240 燃料残量センサー
250 ギアポジション検出部
260 ナイトビューカメラ
300 通信インターフェース
A1,A2,A3,A4 表示領域
C1 速度計画像
C2 回転数計画像
Cc ナビ画像
Cn 暗視画像
Cw1,Cw2 カウントダウン画像
D1,D2,D3 全体画像
【技術分野】
【0001】
本発明は、乗り物用表示制御装置及びプログラムに関する。
【背景技術】
【0002】
例えば、特許文献1には、デジタル式の速度計を表す画像と、指針式のアナログ速度計を表す画像とを表示する第1表示モードから、デジタル式の速度計を表す画像と、車両の走行経路を表す画像とを表示する第2表示モードへ表示を切り換える車両用メーターユニットが開示されている。この車両用メーターユニットは、第1表示モードから第2表示モードへ表示を切り換える場合に、デジタル式の速度計を表す画像の位置を、第1表示モードにおける表示位置から、第2表示モードで走行経路を表す画像を表示する位置と重ならない表示位置へ変化させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−179240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された車両用メーターユニットでは、ユーザ(運転者)が表示画面を見ている最中であっても画像の位置の変化が起こる場合があり、このような場合、ユーザにとっては突然画像の位置の変化が起こることになるので、ユーザの心構えが出来ていないタイミングで、画像の位置の変化が起こることになってしまっていた。
【0005】
本発明は、このような点に鑑みてなされたものであり、乗り物の計器を表す計器画像を表示する計器表示部に表示している画像の表示位置を変化させるときに、ユーザに画像の表示位置の変化への心構えを促すことができる乗り物用表示制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の第一の観点に係る乗り物用表示制御装置は、
乗り物の計器を表す計器画像を表示可能な計器表示部を制御する乗り物用表示制御装置であって、
前記乗り物の情報である乗り物情報を取得する情報取得手段と、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段と、を備え、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする。
【0007】
また上記目的を達成するため、本発明の第二の観点に係るプログラムは、
乗り物の計器を表す計器画像を表示可能な計器表示部を制御するコンピュータを、
前記乗り物の情報である乗り物情報を取得する情報取得手段、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段、として機能させ、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、表示部に表示している画像の表示位置を変化させるときに、ユーザに画像の表示位置の変化への心構えを促すことができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態に係る表示装置の一構成例を示すハードウェア構成図である。
【図2】本発明の実施の形態に係る表示装置が実行する表示制御処理の一例を表すフローチャートである。
【図3】速度計画像及び回転数計画像を表示する計器表示部の表示例を表す図である。
【図4】速度計画像及び回転数計画像に加えて、ナビ画像を表示する計器表示部の表示例を表す図である。
【図5】ナビ画像の表示位置を変更する直前の計器表示部の表示例を表す図である。
【図6】ナビ画像の表示位置を変更する直前の計器表示部の表示例を表す図である。
【図7】画面変化後の計器表示部の表示例を表す図である。
【発明を実施するための形態】
【0010】
本発明に係る一実施形態について図面を参照して説明する。なお、本発明は下記で説明される実施形態(図面の記載内容も含む)によって限定されるものではない。下記で説明される実施形態に変更(構成要素の削除も含む)を加えることができるのはもちろんである。また、以下の説明では、実施形態の理解を容易にするために、重要でない公知の技術的事項の説明を適宜省略する。
【0011】
本実施形態に係る図1の乗り物用表示制御装置100は、自動車内(乗り物内)に設置される計器装置である。乗り物用表示制御装置100は、設置される自動車(以下、自車という。)の情報である車両情報(乗り物情報)を表す画像(以下、部分画像という。)を組み込んだ画像(以下、全体画像という。)を計器表示部109に表示する。部分画像は、計器表示部109の表示画面の一部(全体画像の一部)である表示領域内に表示される。表示領域が変化(移動、拡大、縮小、消滅等)すると、それにともなって、部分画像も変化(移動、拡大、縮小、消滅等)する。
【0012】
車両情報は、自車の運転状況を表す情報である。車両情報としては、計器で表示される、自車の状態を表す情報である計器情報、ユーザ(運転者)による運転に補助的に参照される、自車の置かれた状況を表す情報である補助情報等がある。
【0013】
計器情報は、例えば、自車の走行速度(つまり、車速)、自車のエンジンの回転数で表されるエンジン出力(以下単に、車両出力という)、自車が有する燃料の残量、及び自車が有するギアの位置(つまり、ギアポジション)等の自車の状態についての検出値(計測値等)の情報である。また、補助情報としては、緯度経度等で表される自車の位置や、自車の周囲の風景等の自車の位置に関する情報がある。
【0014】
計器情報を表す部分画像(以下、計器画像という。)は、前記の検出値を表す計器の画像である。補助情報を表す部分画像(以下、補助画像という。)は、地図上に自車の位置を示すことによって、緯度経度等で表される自車の位置を表す画像(所謂、カーナビゲーションシステムにおけるナビ画像)や、自車に取り付けられた暗視カメラによって自車の周囲の風景を撮影することによって自車の位置を表す暗視画像(所謂、ナイトビジョンシステムにおけるナイトビュー画像)等である。
【0015】
乗り物用表示制御装置100は、図1に示すように、表示制御部101と計器表示部109と、を含む。計器表示部109の表示を制御する表示制御部101は、CPU(Central Processing Unit)101a、ROM(Read Only Memory)101b、RAM(Random Access Memory)101c、入力部101d、描画LSI(Large Scale Integration)101e、及びグラフィックメモリ101fを備える。
【0016】
CPU101aは、ROM101bに格納されたプログラムに従った処理を実行することで、乗り物用表示制御装置100を構成する各部を制御し、後述の処理を行う。例えば、CPU101aは、前記のプログラムに従って、計器表示部109に表示させる全体画像の画像データを生成し、生成した画像データを描画LSI101eへ出力する。
【0017】
CPU101aは、ECU(Engine Control Unit)200と通信インターフェース(以下単に、通信IFという)300及びシリアルバス10を介して接続され、CPU101aは、これらを介してECU200と通信を行う。
【0018】
ROM101bは、前記のプログラムの他、各種画像を表すデータ、地図データ、及びフォントデータ等のCPU101aが使用するデータを記憶する。
【0019】
RAM101cは、処理中にCPU101aが使用するデータを一時的に記憶するメインメモリとして機能する。
【0020】
入力部101dは、ユーザからの各種操作を受け付ける操作ボタン、計器表示部109に配置されたタッチパネル等を備える。入力部101dは、ユーザからの操作を受け付け、受け付けた操作に応じた内容の操作信号を生成してCPU101aに出力する。
【0021】
描画LSI101eは、CPU101aから供給される画像データを受け取ると共に、受け取った画像データをグラフィックメモリ101f上に展開する。その後、描画LSI101eは、展開した画像データを、計器表示部109に出力し、計器表示部109は画像データが表す画像を表示する。このように、描画LSI101eは、画像を計器表示部109に描画する機能を有し、CPU101aは描画LSI101eを用いて計器表示部109に画像を表示する。
【0022】
計器表示部109は、例えば、TFT(Thin Film Transistor)型のLCD(Liquid Crystal Display)109aと、LCD109aの背後に設置され、LCD109aを照光するバックライトモジュール109bとを備え、描画LSI101eによって出力された全体画像をLCD109aとバックライトモジュール109bとを用いて表示する。
【0023】
なお、ECU200は、車速センサー210、車両出力検出ユニット220、燃料残量センサー240、及びギアポジション検出部250に接続され、それぞれのセンサー及び検出部が検出した車速、車両出力、燃料の残量、及びギアポジションを表すアナログ信号をそれぞれのセンサー及び検出部から取得する。その後、ECU200は、A−D(Analog−to−Digital)変換器を用いて、アナログ信号をデジタルデータに変換した後に、変換したデータを、例えば、CAN(Controller Area Network)通信によって乗り物用表示制御装置100へ送信する。これらのデジタルデータは、計器情報を表すデータに該当する。また、ECU200は、全地球測位システム(Grobal Positioning System、以下GPS)受信機230、及び暗視カメラであるナイトビューカメラ260に接続されている。ECU200は、GPS受信機230が検出した自車の位置を表す自車位置データをGPS受信機230から取得するとともに、ナイトビューカメラ260が撮影した暗視画像(つまり、ナイトビュー)を表す暗視画像データをナイトビューカメラ260から取得し、取得した各データを乗り物用表示制御装置100へ送信する。これらのデータは、補助情報を表すデータに該当する。
【0024】
次に、乗り物用表示制御装置100のCPU101aが行う処理を説明する。図1のCPU101aは、図2に示すような表示制御処理を実行する。まず、バッテリーからイグニッションの両端子に電圧が印加されると、乗り物用表示制御装置100が始動する。乗り物用表示制御装置100のCPU101aは、この始動によって、表示制御処理を開始する。なお、以下の処理で必要なデータは、ROM101bに予め記録されており、CPU101aは、必要に応じて、ROM101bから必要なデータを取得して使用し、下記の処理を行うものとする。
【0025】
なお、下記の説明では、図3の全体画像D1が表示され、その後に図4の全体画像D2が表示され、そして、図7の全体画像D3が表示される場合を具体例とする。
【0026】
CPU101aは、各種車両情報を取得することを開始する(ステップS01)。例えば、乗り物用表示制御装置100が始動すると、まず、CPU101aは、図1のECU200に対して各種車両情報の送信要求を行い、ECU200に各種車両情報を表すデータを送信させる。このようにして、CPU101aは、ECU200から、各種の計器情報、補助情報を表すデータを取得することを開始する。以降、CPU101aは、表示制御処理中、定期的に、各種車両情報を表すデータを取得し続ける。
【0027】
次に、CPU101aは、取得した各種車両情報のうちの予め定められている車両情報を表す画像を1以上組み込んだ全体画像を計器表示部109に表示させることを開始する(ステップS02)。
【0028】
例えば、CPU101aは、車速を表す計器画像である速度計画像(スピードメータの画像)C1と、エンジンの回転数を表す計器画像である車両情報を示す回転数計画像(タコメータの画像)C2と、を含む全体画像D1の画像データを生成し、描画LSI101eに供給し、前記全体画像D1を計器表示部109に表示させる(図3参照)。
【0029】
具体的には、CPU101aは、ECU200から取得した車速を示す指針を含む速度計画像C1のデータを生成する。また同様に、CPU101aは、ECU200から取得したエンジンの回転数を示す指針を含む回転数計画像C2のデータを生成する。そして、CPU101aは、速度計画像C1のデータと回転数計画像C2のデータとを含む図3のような全体画像D1の画像データを生成する。図3のように、全体画像D1は、表示領域A1に表示された速度計画像C1と、表示領域A2に表示された回転数計画像C2とを含み、両者は水平方向に隣接している。CPU101aは、このような処理によって、全体画像D1の画像データを生成し、描画LSI101eに供給し、全体画像D1を計器表示部109に表示する。
【0030】
ユーザは、図3の全体画像D1を見て、速度計画像C1の指針が指し示す方向や回転数計画像C2の指針が指し示す方向を確認することによって、車両状態を把握することができる。なお、速度計画像C1のような車両速度を表示する画像については、他に車両速度を表示する表示装置がない限り、車両用表示装置としての制約上、いかなる場合においても必ず表示させる必要がある。
【0031】
なお、CPU101aは、これ以降、ステップS03以降の処理と並行して、ECU200から定期的に供給される車両情報のうち、現在表示中の部分画像(以降の処理で新たに表示される部分画像も含む。)の表示に使用される車両情報を用いて、上記の手順で全体画像の新たなデータを生成し、描画LSI101eに供給する処理をリアルタイムで繰り返す(画像の更新)。これによって、計器表示部109に表示されている部分画像は、車両情報の内容の変化に従って、リアルタイムで変化するので、車両情報がリアルタイムで表示される。
【0032】
全体画像D1においては、速度計画像C1の指針や回転数計画像C2の指針が、画像上で、実際の車速や回転数の変化に応じてリアルタイムに変位(回転)する。これによって、全体画像D1において、車速及び回転数が、それぞれ、速度計画像C1及び回転数計画像C2によってリアルタイムで表示される。
【0033】
全体画像D2においては、速度計画像C12の指針や回転数計画像C22の指針に加えて、ナビ画像Ccの、地図上の自車の位置が、画像上で、実際の自車の位置(緯度及び経度)の変化に応じてリアルタイムに変化する。これによって、全体画像D2において、地図上の自車の位置が、ナビ画像Ccによってリアルタイムで表示される。
【0034】
全体画像D3においては、速度計画像C12の指針やナビ画像Ccの自車の位置に加えて暗視画像Cnが、実際の自車の周囲の風景の変化に応じてリアルタイムに変化する。これによって、全体画像D3において、自車の周囲の風景が暗視画像によってリアルタイムで表示される。
【0035】
次に、CPU101aは、現在表示されている全体画像を変化させる必要があるかを判別する(ステップS03)。例えば、ユーザが、新たに表示させる部分画像を指定する操作(ナビ画像を表示させる操作や、暗視画像を表示させる操作)や、部分画像を移動させる操作、表示を終了させる部分画像を指定する操作や、拡大する部分画像を指定する操作や、縮小する部分画像を指定する操作等を、入力部101dに対して行った場合、これらの操作に応じて、全体画像を変化させる必要がある。このため、例えば、CPU101aは、前記操作に応じた操作信号が入力部101dから供給された場合に、全体画像を変化させる必要があると判別し(ステップS03;YES)、前記操作に応じた操作信号が供給されていない場合に、全体画像を変化させる必要がないと判別する(ステップS03;NO)。
【0036】
CPU101aは、全体画像を変化させる必要がないと判別した場合(ステップS03;NO)には、再びステップS03の処理を行い、全体画像を変化させる必要があるまで待機する。
【0037】
一方、CPU101aは、全体画像を変化させる必要があると判別した場合(ステップS03;YES)には、内部に備えるカウントダウン用レジスタに所定の数値(正の整数)をセットする(ステップS04)。以降、CPU101aは、一秒経過する毎に、カウントダウン用レジスタの数値から1を差し引く。例えば、カウントダウン用レジスタにセットされる数値は5であり、5秒後に0になる。例えば、現在表示されている画像が全体画像D1である場合には、新たに表示させる部分画像として、ナビ画像Ccが指定される操作が行われ、現在表示されている画像が全体画像D2である場合には、新たに表示させる部分画像として、暗視画像Cnが指定される操作が行われたものとする。
【0038】
CPU101aは、ステップS04の後、カウントダウンを表示するかの判別を行う(ステップS05)。本実施形態では、補助画像を移動させる場合に、カウントダウンを表示する。補助画像を移動させる場合は、例えば、計器表示部109に補助画像が表示されている状態で、ユーザが、新たに表示させる部分画像を指定する操作や、補助画像を移動させる操作や、表示を終了させる部分画像として補助画像を指定する操作や、拡大する部分画像として補助画像を指定する操作や、縮小する部分画像として補助画像を指定する操作等を入力部101dに対して行った場合である。つまり、このような場合、前記の各操作に応じて補助画像の表示領域を変化(移動、消去、縮小、又は拡大)させる必要がある。
【0039】
CPU101aは、ステップS03でYESと判別された操作信号のうち、前記各操作に応じた操作信号が供給されている場合、カウントダウンを表示すると判別し(ステップS05;YES)、その他の場合には、カウントダウンを表示しないと判別する(ステップS05;NO)。例えば、新たに表示させる部分画像として、現在表示されている画像が全体画像D1である場合に、ナビ画像Ccが指定される操作が行われた場合には、ステップS05でNOと判別され、現在表示されている画像が全体画像D2である場合に、暗視画像Cnが指定される操作が行われた場合には、ステップS05でYESと判別される。
【0040】
CPU101aは、カウントダウンを表示しないと判別した場合には(ステップS05;NO)、カウントダウン用レジスタの数値が0になるまで待機し(ステップS06)、待機後、ステップS09の処理を行う。
【0041】
CPU101aは、カウントダウンを表示すると判別した場合には(ステップS05;YES)、カウントダウン用レジスタの数値に応じた画像(カウントダウン画像)を含む全体画像を計器表示部109に表示し(ステップS07)、カウントダウン用レジスタの数値が0であるかを判別し(ステップS08)、カウントダウン用レジスタの数値が0でない場合には(ステップS08;NO)、再びステップS07の処理を行う。
【0042】
具体的には、CPU101aは、上記の画像の更新のために全体画像の画像データを生成するときに、カウントダウン画像を含む全体画像の画像データを生成し、描画LSI101eに供給して、全体画像を計器表示部109に表示させる。CPU101aは、このような処理を、カウントダウン用レジスタの数値が0になるまで、つまり、ステップS08でYESを判別するまで繰り返し行う。これによって、カウントダウン画像が、全体画像上で、リアルタイムで表示される。カウントダウン画像は、カウントダウン用レジスタの数値に応じた画像であるので、1秒毎に変化する。CPU101aは、例えば、図5及び図6のような全体画像D2を表示する。カウントダウン画像は、例えば、カウントダウン用レジスタの数値を図形で表したものであったり(例えば、図5のカウントダウン画像Cw1参照)、カウントダウン用レジスタの数値を数字で表したものであったりする(例えば、図6のカウントダウン画像Cw2参照)。カウントダウン画像Cw1では、左から、1秒ごとに黒丸が右から順に白丸に変化する。カウントダウン画像Cw2では、数字が1秒ごとに1ずつ減っていく。
【0043】
カウントダウン用レジスタの数値が0である場合(ステップS08;YES)、CPU101aは、ステップS09の処理を行う。CPU101aは、ステップS09において、入力部101dが受け付けているユーザからの操作(上記ステップS03参照)に応じて、全体画像を変化させる。CPU101aは、ユーザが指定する部分画像を現在の全体画像に新たに含ませたり(このとき、現在の部分画像は、消去又は移動等させられる。)、ユーザが指定する部分画像(つまり、この部分画像の表示領域)を移動、消去、拡大又は縮小したりする。つまり、カウントダウン用レジスタの数値は、全体画像が変化するまでの残り時間(秒)を示すものである。
【0044】
全体画像D1が表示されている場合に、CPU101aが、操作信号として、ナビ画像の表示を指定する操作信号を取得している場合、CPU101aは、カウントダウン用レジスタの数値が0になると(ステップS05の後)、ECU200から供給される自車位置データに基づいて、自車の位置を地図上で表すナビ画像Cc(図4参照)のデータを生成する。このとき、ROM101bに記録されている地図データ等が使用される。CPU101aは、速度計画像C12の画像データ、回転数計画像C22の画像データ、ナビ画像Ccの画像データ等に基づいて、全体画像D1から全体画像D2への遷移を表現するアニメーション画像を構成する連続的な複数の画像をそれぞれ表す複数の画像データを生成し、描画LSI101eに供給し、アニメーション画像を計器表示部109に表示する。そして、CPU101aは、最終的に、全体画像D2の画像データを生成し、全体画像D2を計器表示部109に表示する。
【0045】
例えば、CPU101aは、全体画像D1上で、速度計画像C1の表示領域A1及び回転数計画像C2の表示領域A2を、各々水平方向に離れるように移動させながら縮小し、その間の位置に形成される表示領域A3にナビ画像Ccを表示する。これにより速度計画像C1及び回転数計画像C2が視認性が低下しない程度に縮小しながら移動し(図4の速度計画像C12及び回転数計画像C22)、その間の位置にナビ画像Ccが新たに表示され、最終的に、速度計画像C12と回転数計画像C22と両者の間に位置するナビ画像Ccとを含む全体画像D2が表示される(図4参照)。
【0046】
全体画像D2が表示されている場合に、CPU101aが、操作信号として、暗視画像の表示を指定する操作信号を取得している場合、CPU101aは、カウントダウン用レジスタの数値が0になると(つまり、カウントダウン後)、CPU101aは、ECU200から供給される暗視画像の画像データと、速度計画像C12の画像データ、ナビ画像Ccの画像データ等に基づいて、全体画像D2から全体画像D3への遷移を表現するアニメーション画像を構成する連続的な複数の画像をそれぞれ表す複数の画像データを生成し、描画LSI101eに供給し、アニメーション画像を計器表示部109に表示する。なお、アニメーション画像では、カウントダウン画像は含まれない。そして、CPU101aは、最終的に、全体画像D3の画像データを生成し、全体画像D3を計器表示部109に表示する。
【0047】
例えば、CPU101aは、全体画像D2上で、表示領域A3を、向かって右方向に水平移動させ、その間の位置に形成される表示領域A4に暗視画像を表示する。これによりナビ画像Ccが水平移動し、その間の位置に暗視画像Cnが新たに表示され、最終的に、速度計画像C12とナビ画像Ccと両者の間の暗視画像Cnを含む全体画像D3が表示される(図7参照)。なお、このとき、回転数計画像C2は消去されている。このように、新たな部分画像を表示する場合には、予め設定されたルールに基づいて、所定の部分画像を消去してもよい。
【0048】
CPU101aは、その後、ステップS03の処理に戻る。本表示制御処理は、例えば、バッテリーからイグニッションの両端子への電圧が印加されなくなると終了する。
【0049】
なお、表示領域A1、表示領域A2、表示領域A3、及び表示領域A4を表す破線は、計器表示部109には表示されない。
【0050】
本実施形態では、上記の構成によって、CPU101aは、補助画像を表示した表示領域を変化(移動、拡大、縮小、消去を含む)させるが、補助画像を表示した表示領域を変化させる前に、補助画像を表示した表示領域を変化させるまでの残り時間を計器表示部109に更に表示する(カウントダウン表示)。残り時間は、上記のように、数字で表示されるか、図形等で表される。残り時間は、表示領域を変化させた後を基準とした時間でもよいし、表示領域を変化させる始点を基準とした時間でもよい。
【0051】
本実施形態では、表示領域を変化させるまでの残り時間を表示することによって、あとどの位の残り時間で補助画像が変化(移動、拡大、縮小、消去を含む)するかを把握することができ、区切りのよい箇所までを一時的に覚えるなど、補助画像の変化に備えることができる。このように、本実施形態では、計器表示部109に表示している画像の表示位置を変化させるときに、運転で忙しいユーザに画像の表示位置の変化への心構えを促すことができる。
【0052】
なお、カウントダウン画像Cw1における白丸は、カウントダウン開始からの経過時間を、黒丸は、画面の変化までの残り時間を表す。カウントダウン画像Cw1は、これら記号の組み合わせによって、ユーザに対して画面遷移までの残り時間を報知し、画面遷移に対する準備を促すものである。カウントダウン画像Cw2におけるアラビア数字は、画面遷移までの残り時間を表すものであり、これによって、残り時間をユーザは把握しやすい。また、カウントダウン画像Cw1を表示するときのように、カウントダウン画像Cw1とともに、画面遷移の予告を、文章や記号等で表示することによって、ユーザは画面遷移があることを把握しやすい。
【0053】
ところで、画像によっては突然の変化があっても、ユーザは困らないことがある。例えば、画像が計器画像である場合、このような画像は内容を一見して把握できるので、画像が突然移動等しても、ユーザはそれほど困らない。一方で、このような画像の変化する場合に、残り時間を表示するとかえって煩わしい。また、補助画像は、内容を理解するのに、ある程度の時間がかかる。このため、画像が突然移動等すると、ユーザは補助画像を追わなければいけないので、困惑する。このため、補助画像を移動等させる場合には、カウントダウン表示をして、ユーザに心構えを促すことが望ましい。
【0054】
そこで、上記実施形態では、上記構成によって、CPU101aは、表示領域を変化させる画像が予め定められた第1の画像(本実施形態では、補助画像)である場合にカウントダウン表示を行い、表示領域を変化させる画像が予め定められた第2の画像(本実施形態では、計器画像)である場合にカウントダウン表示を行わない。このようにすることで、必要な場合にのみ、カウントダウン表示を行うことができ、ユーザーの利便性を良くすることができる。特に、補助画像は、ナビ画像等の地図を含む画像である場合に、このような効果がある。なお、第1の画像は、補助情報に限られない。また、第2の画像は、計器画像に限られない。また、第2の画像の表示領域を変化させるときには、ステップS05の処理を行わなくても良い。つまり、すぐに、第2の画像の表示領域を変化させてもよい。
【0055】
また、上記カウントダウン画像Cw2のように、表示領域及びその中の画像(ナビ画像Cc)を移動させる場合に、前記残り時間を、移動させる画像を基準として、この画像を移動させる方向の位置に表示すると、移動させる画像のこれからの移動方向が分かるので、ユーザにとっての利便性が良い。特に、移動までの残り時間と、移動方向とが一度に把握されるので、ユーザにとっての利便性が良い。なお、表示する残り時間は、移動させる画像内であっても、画像外であっても、その中間であってもよい。画像外の場合には、前記残り時間を、移動させる画像の近傍に表示することが望ましい。これによって、残り時間と、移動させる画像との関係が分かりやすい。また、前記残り時間の表示位置は、移動させる画像の中心を基準として方向にすると、移動方向が分かりやすい。
【0056】
なお、上記実施形態では、速度計画像や回転数計画像として、同心円内部に記載された目盛りと指針画像との組み合わせによって車両情報を把握可能なアナログ式指針画像を例にして説明したがこれに限るものではなく、セグメント調数字や、棒グラフといった表示でもよい。
【0057】
また補助画像は、上記の画像に限られない。補助画像は、車両の故障状態等を報知するメッセージなど、表示された情報をユーザが短時間で読み取ることが困難な画像であればよく、補助情報は、そのような画像によって表される情報であればよい。
【0058】
また、上記のように、残り時間の表示とともに、全体画像の変化の移り変わりを、アニメーション画像で順次表示することによって、ユーザは、心構えをした後で、画像の変化を追うことができ、画像の変化を非常に追いやすくなり、ユーザにとって利便性がよい。
【0059】
また、表示制御部101は、ハードディスク等の他の不揮発性記憶装置を、ROM101bに加えて、又は、ROM101bの代わりに備え、この他の不揮発性記憶装置が、ROM101cが記憶するプログラムやデータの少なくとも一部を記憶してもよい。
【0060】
また、計器画像の表示領域を変化させるときに、残り時間の表示を行っても良い。
【0061】
CPU101aは、残り時間の表示に伴って、図示しない音声出力装置に「まもなく画面が切り替わります」といった、表示領域の変化を報知するメッセージを出力し、視覚的方法に加えて聴覚的方法によって、表示領域の変化のユーザへの認知を促してもよい。音声出力装置には、例えば自車内に搭載されたスピーカを用いる。
【0062】
また、音声出力装置に出力するメッセージは、表示領域が変化する画像が、変化後に引き続き表示されるか否かによって切り替えてもよい。即ち、当該画像が、表示位置を変えて(例えば左へ)引き続き表示される場合には、例えば「ナビゲーション画像が左へ移動します」という、画像が引き続き表示される旨のメッセージを音声出力装置に出力する。一方、当該画像が、変化後に画面に表示されない場合には、例えば「ナビゲーション画像は○○ボタンにより再表示可能です」という、画像が引き続き表示されない旨のメッセージを音声出力装置に出力する。これによって、ユーザの利便性が向上する。
【0063】
また残り時間の表示は、例えば、セグメント調数字や、棒グラフ、画面の点滅周期によってもよい。
【0064】
また残り時間の表示の際に、表示領域が移動する方向を矢印で示してもよいし、上・下・左・右などの方向を示す文字で表示してもよい。これによっても、ユーザは画像の移動方向が分かるので、ユーザにとって利便性が良い。
【0065】
また図5においては、画面遷移予告画像Cw1の表示位置をナビゲーション画像Ccの上部とした場合を例に説明したがこれに限るものではない。状況に応じて上下左右、或いはナビゲーション画像Ccとのアルファブレンディングなど、種々の画像処理手法を用いてもよい。
【0066】
また、計器表示部109は、計器画像を一時的に全く表示しなくてもよい。
【0067】
また、表示領域を変化させる契機(残り時間の表示を始める計器)は、ユーザからの操作によらず、自動であってもよい。例えば、ナビ画像を全体画像の中央に表示している時に、自車が所定の交差点に近づいているとする。この場合に、CPU101aは、ナビゲーションシステム上で、自車の位置がその交差点から所定の距離内に移動したと判別したときから所定時間後に、ナビ画像の表示領域をに移動させるとともに、その交差点の拡大画像を中央に表示するとする。この場合、CPU101aは、前記の判別を契機として、残り時間を表示してもよい。
【0068】
また、本発明に係る乗り物用表示制御装置は、計器表示部109を備えず、外部の計器表示部を制御する表示制御装置として機能してもよい。
【0069】
なお、CPU101aは、各種車両情報のうち、全体画像の表示に必要な車両情報のみを取得してもよい。この場合、CPU101aは、必要な車両情報の取得要求をECU200に供給し、ECU200は、この取得要求に基づいて、必要な車両情報をCPU101aに供給する。このような場合、ECU200は、車両情報の供給に不必要なセンサ、検出部、装置等については、動作させなくても良い。
【0070】
また、本発明に係る乗り物用表示制御装置は、船舶、二輪車、飛行機等の他の乗り物用であってもよい。運転は、飛行機についての操縦等の表現を含む。
【0071】
CPU101aを動作させる上記プログラムの配布方法は任意であり、例えば、メモリカード、CD−ROM、又はDVD−ROMなどの記録媒体に格納して配布できる他、インターネットなどの通信媒体を介して配布することもできる。このようにして、上記プログラムをコンピュータにインストールすることによって、コンピュータを上記の乗り物用表示制御装置として機能させてもよい。
【符号の説明】
【0072】
100 乗り物用表示制御装置
101 表示制御部
101a CPU
101b ROM
101c RAM
101d 入力部
101e 描画LSI
101f グラフィックメモリ
109 計器表示部
109a LCD
109b バックライトモジュール
200 ECU
210 車速センサー
220 車両出力検出ユニット
230 GPS
240 燃料残量センサー
250 ギアポジション検出部
260 ナイトビューカメラ
300 通信インターフェース
A1,A2,A3,A4 表示領域
C1 速度計画像
C2 回転数計画像
Cc ナビ画像
Cn 暗視画像
Cw1,Cw2 カウントダウン画像
D1,D2,D3 全体画像
【特許請求の範囲】
【請求項1】
乗り物の計器を表す計器画像を表示可能な計器表示部を制御する乗り物用表示制御装置であって、
前記乗り物の情報である乗り物情報を取得する情報取得手段と、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段と、を備え、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする乗り物用表示制御装置。
【請求項2】
前記表示処理手段は、前記表示領域を変化させる前記乗り物情報画像が予め定められた第1の画像である場合に前記第3の処理を行い、前記表示領域を変化させる前記乗り物情報画像が予め定められた第2の画像である場合に前記第3の処理を行わない、
ことを特徴とする請求項1に記載の乗り物用表示制御装置。
【請求項3】
前記第1の画像は、地図を含む画像であり、
前記第2の画像は、前記計器画像である、
ことを特徴とする請求項2に記載の乗り物用表示制御装置。
【請求項4】
前記表示処理手段は、前記第2の処理において、前記乗り物情報画像を移動させることによって、前記乗り物情報画像の表示領域を変化させ、前記第3の処理において、前記残り時間を、前記乗り物情報画像を基準として前記乗り物情報画像を移動させる方向の位置に表示する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の乗り物用表示制御装置。
【請求項5】
乗り物の計器を表す計器画像を表示可能な計器表示部を制御するコンピュータを、
前記乗り物の情報である乗り物情報を取得する情報取得手段、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段、として機能させ、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とするプログラム。
【請求項1】
乗り物の計器を表す計器画像を表示可能な計器表示部を制御する乗り物用表示制御装置であって、
前記乗り物の情報である乗り物情報を取得する情報取得手段と、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段と、を備え、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とする乗り物用表示制御装置。
【請求項2】
前記表示処理手段は、前記表示領域を変化させる前記乗り物情報画像が予め定められた第1の画像である場合に前記第3の処理を行い、前記表示領域を変化させる前記乗り物情報画像が予め定められた第2の画像である場合に前記第3の処理を行わない、
ことを特徴とする請求項1に記載の乗り物用表示制御装置。
【請求項3】
前記第1の画像は、地図を含む画像であり、
前記第2の画像は、前記計器画像である、
ことを特徴とする請求項2に記載の乗り物用表示制御装置。
【請求項4】
前記表示処理手段は、前記第2の処理において、前記乗り物情報画像を移動させることによって、前記乗り物情報画像の表示領域を変化させ、前記第3の処理において、前記残り時間を、前記乗り物情報画像を基準として前記乗り物情報画像を移動させる方向の位置に表示する、
ことを特徴とする請求項1乃至3のいずれか1項に記載の乗り物用表示制御装置。
【請求項5】
乗り物の計器を表す計器画像を表示可能な計器表示部を制御するコンピュータを、
前記乗り物の情報である乗り物情報を取得する情報取得手段、
前記情報取得手段が取得した前記乗り物情報を表す乗り物情報画像を前記計器表示部内の表示領域に表示する第1の処理と前記乗り物情報画像を表示している前記表示領域を変化させる第2の処理とを行う表示処理手段、として機能させ、
前記表示処理手段は、前記第2の処理で前記表示領域を変化させる前に、前記表示領域を変化させるまでの残り時間を前記計器表示部に更に表示する第3の処理を行う、
ことを特徴とするプログラム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−180061(P2012−180061A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−45564(P2011−45564)
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年3月2日(2011.3.2)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
[ Back to top ]