
乗員保護装置制御システム
【課題】主に、車両の衝突形態に応じて最適タイミングで乗員保護装置を作動させることができるようにする。
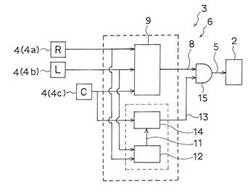
【解決手段】制御装置6が、複数の前側加速度センサ4a,4bの検出値の差に基づいて車両の衝突形態11を判断する衝突形態判断部12を備えるようにする。また、この衝突形態判断部12が判断した車両の衝突形態11に応じたタイミングで副作動信号13を出力すると共に、検出値の差が大きくなる衝突形態の場合に、副作動信号13を出力するタイミングを遅らせるタイミング調整部14を備えるようにする。更に、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力する出力制御部15を備えるようにする。
【解決手段】制御装置6が、複数の前側加速度センサ4a,4bの検出値の差に基づいて車両の衝突形態11を判断する衝突形態判断部12を備えるようにする。また、この衝突形態判断部12が判断した車両の衝突形態11に応じたタイミングで副作動信号13を出力すると共に、検出値の差が大きくなる衝突形態の場合に、副作動信号13を出力するタイミングを遅らせるタイミング調整部14を備えるようにする。更に、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力する出力制御部15を備えるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、乗員保護装置制御システムに関するものである。
【背景技術】
【0002】
自動車などの車両には、緊急時に乗員を保護するための乗員保護装置が設けられている。そして、上記した乗員保護装置を作動させるための乗員保護装置制御システムも設けられている(例えば、特許文献1参照)。
【0003】
上記した乗員保護装置には、例えば、エアバッグ装置やシートベルト拘束装置などが存在している。また、上記した乗員保護装置制御システムは、車体に設けられた加速度センサと、加速度センサからの検出値に基づき、乗員保護装置へ作動指令を出力する制御装置とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−196589号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記乗員保護装置制御システムには、以下のような問題があった。
【0006】
乗員保護装置の作動タイミングは、例えば、乗員の頭部が3インチ〜5インチ程度移動した時が最適であるなどとされている。
【0007】
一方、車両の衝突形態には、例えば、フルラップ前面衝突(真正面衝突)や、オフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの各種のものがあり、通常は、上記したフルラップ前面衝突の場合に、上記した最適な作動タイミングが得られるように構成されている。
【0008】
そして、上記したオフセット衝突や斜め衝突などの各種の衝突形態を検知できるようにするために、上記した加速度センサ(いわゆる、主加速度センサ)に加え、追加の加速度センサを設けて、加速度センサを複数化することによって、検知精度を高めることが行われている。
【0009】
しかし、上記した乗員保護装置の作動タイミングは、上記した各衝突形態によってそれぞれ異なるものであるため、複数の加速度センサを設けて各種の衝突形態を検知できるようにしただけでは、まだ充分ではない。
【0010】
即ち、例えば、上記したように加速度センサを複数備えた場合、いずれか1つの加速度センサが先行して衝突を検知するオフセット衝突や斜め衝突の時に、複数の加速度センサがほぼ同時に衝突を検知するフルラップ前面衝突の時よりも、制御の開始が早くなるので、結果として乗員保護装置の作動タイミングが早くなる傾向があった。これは、加速度センサを複数備えることによって検知精度が高められたことにより新たに生じた問題とも言うことができる。
【課題を解決するための手段】
【0011】
上記課題を解決するために、請求項1に記載された発明は、車体の前側に車幅方向へ離間配置されて車両前後方向の加速度を検出可能な複数の前側加速度センサ、を含む複数の加速度センサと、該各加速度センサからの検出値に基づき車両の衝突を判断して乗員保護装置へ作動指令を出力する制御装置とを備えた乗員保護装置制御システムにおいて、前記制御装置が、主作動信号を出力する主制御部と、前記複数の前側加速度センサの検出値の差に基づいて車両の衝突形態を判断する衝突形態判断部と、該衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力すると共に、前記複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、前記副作動信号を出力するタイミングを遅らせるタイミング調整部と、前記主制御部からの主作動信号と前記タイミング調整部からの副作動信号との両方が入力された時に前記作動指令を出力する出力制御部とを備えたことを特徴としている。
【0012】
請求項2に記載された発明は、上記において、前記タイミング調整部は、閾値を上げることによって、前記副作動信号の出力を遅らせることを特徴としている。
【発明の効果】
【0013】
請求項1の発明によれば、上記構成によって、以下のような作用効果を得ることができる。即ち、制御装置が、衝突形態判断部を備えたことにより、複数の前側加速度センサの検出値に基づいて車両の衝突形態を判断することができる。また、タイミング調整部を備えたことにより、衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力させるようにすることができる。更に、出力制御部を備えたことにより、主制御部からの主作動信号とタイミング調整部からの副作動信号との両方が入力された時に作動指令を出力させるようにすることができる。これにより、主制御部からの主作動信号に対し、タイミング調整部からの副作動信号によってタイミング調整することが可能となる。以って、車両の衝突形態に応じて最適タイミングで乗員保護装置を作動させることができる。上記において、衝突形態判断部が、複数の前側加速度センサの検出値の差に基づいて衝突形態を判断することにより、複数の前側加速度センサの位置関係を利用して車両の衝突形態を正確に判断することが可能となる。また、タイミング調整部が、上記した複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、副作動信号を出力するタイミングを遅らせることにより、複数の前側加速度センサでの検出タイミングや検出値が大きくズレる衝突形態の場合に、作動タイミングを適正化することが可能となる。
【0014】
請求項2の発明によれば、上記構成によって、以下のような作用効果を得ることができる。即ち、タイミング調整部が、閾値を上げることによって、副作動信号の出力を遅らせることにより、閾値の変更だけで衝突形態に応じた最適な作動タイミングを得ることができる。また、副作動信号の出力を遅らせるために、特別な遅延手段を用意する必要をなくすことができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施例にかかる乗員保護装置制御システムを備えた車両の概略平面図である。
【図2】図1の乗員保護装置制御システムの系統図である。
【図3】図2の乗員保護装置制御システムによる制御の流れを示すフローチャートである。
【図4】主制御部による衝突判断の状況を示すグラフである。
【図5】衝突形態判断部による衝突形態の判断の状況を示すグラフである。
【図6】タイミング調整部によるタイミング調整の状況を示すグラフである。
【発明を実施するための形態】
【0016】
以下、本実施の形態を具体化した実施例を、図面を用いて詳細に説明する。
【0017】
図1〜図6は、この実施例およびその変形例を示すものである。
【実施例】
【0018】
<構成>以下、構成について説明する。
【0019】
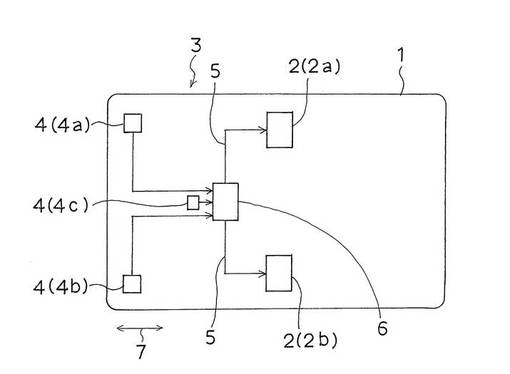
図1に示すように、自動車などの車両1には、緊急時に乗員を保護するための乗員保護装置2が設けられている。上記した乗員保護装置2には、例えば、エアバッグ装置(運転席側エアバッグ装置2a、助手席側エアバッグ装置2b)やシートベルト拘束装置などが存在している。
【0020】
そして、この乗員保護装置2を作動させる乗員保護装置制御システム3が設けられている。
【0021】
上記した乗員保護装置制御システム3は、以下の構成を備えている。
【0022】
即ち、乗員保護装置制御システム3は、車体に設けられた複数の加速度センサ4と、各加速度センサ4からの検出値に基づき、乗員保護装置2へ作動指令5を出力する制御装置6とを備えている。
そして、上記した加速度センサ4が、少なくとも、車体の前側に車幅方向へ離間した状態で配置されて、車両前後方向7の加速度を検出可能な複数の前側加速度センサ4a,4bを有している。また、上記した制御装置6が、図2に示すように、車両1の衝突を判断して主作動信号8を出力する主制御部9を有している。
【0023】
ここで、前側とは、車両前後方向7を基準とした前側のことである。前側加速度センサ4a,4bは、通常、フロントバンパーの両側部に左右一対取り付けられている。但し、前側加速度センサ4a,4bの設置位置や設置個数はこれに限るものではない。
【0024】
また、加速度センサ4には、上記の他に、車両前後方向7のほぼ中間部で、車幅方向のほぼ中央部などに配置されて、車幅方向の加速度を検出可能な中央加速度センサ4c(主加速度センサ)なども備えられている。この中央加速度センサ4cは、乗員保護装置制御システム3において、最も早く採用された加速度センサ4の1つである。これに対し、上記した前側加速度センサ4a,4bは、後述するオフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの様々な衝突形態を検出するために、後から設置されることになったものである。中央加速度センサ4cは、前側加速度センサ4a,4bよりも、乗員に近い位置に設置される。
【0025】
上記した制御装置6は、車両1の中央部や前部座席の下などに設けられる。但し、制御装置6の設置位置は、これに限るものではない。制御装置6は、例えば、ワンチップマイコンと制御用ソフトウェアなどによって構成される。
【0026】
上記した主制御部9には、前側加速度センサ4a,4bおよび中央加速度センサ4cからの検出値が入力される。主制御部9は、上記した各加速度センサ4からの検出値を基に車両1の衝突を総合的に判断して、乗員保護装置2を作動させるかどうかの最終判断を行うものである。
【0027】
なお、乗員保護装置2の作動タイミングには、最適な作動タイミングがあり、例えば、乗員の頭部が3インチ〜5インチ程度移動した時などとされている。但し、最適な作動タイミングは、これに限るものではなく、装置構成などによって異なる場合がある。
【0028】
また、車両1の衝突形態(或いは、衝突条件、衝突状況)には、例えば、フルラップ前面衝突(真正面衝突)や、オフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの各種のものがある。そして、主制御部9は、フルラップ前面衝突の場合に、上記したような最適な作動タイミングが得られるように制御を行っている。
【0029】
そして、以上のような基本構成に対し、この実施例のものでは、以下のような構成を備えるようにしている。
【0030】
(構成1)
上記した制御装置6が、複数の前側加速度センサ4a,4bの検出値から車両1の衝突形態11を判断する衝突形態判断部12を備えるようにする。
【0031】
また、この衝突形態判断部12が判断した車両1の衝突形態11に応じたタイミングで副作動信号13を出力するタイミング調整部14を備えるようにする。
【0032】
更に、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力する出力制御部15を備えるようにする。
【0033】
ここで、タイミング調整部14には、上記した中央加速度センサ4cからの検出値そのものではなく、検出値の積分値が使われるように構成されている。そのために、タイミング調整部14の内部には、図示しない積分器が設けられる。
【0034】
衝突形態判断部12とタイミング調整部14とによって、乗員保護装置2の作動タイミングを調整可能な副制御部(タイミング調整用制御部)が構成される。
【0035】
出力制御部15は、最終的に乗員保護装置2の作動、不作動を決定する作動判断回路として機能する。この場合、出力制御部15は、アンド回路とされている。
【0036】
(構成1a)
更に、上記した衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の差に基づいて衝突形態11を判断するものとされる。
【0037】
そして、上記タイミング調整部14が、上記した複数の前側加速度センサ4a,4bの検出値の差が大きくなる衝突形態11の場合に、副作動信号13を出力するタイミングを(通常よりも)遅らせるよう構成される。
【0038】
ここで、衝突形態判断部12は、各前側加速度センサ4a,4bの検出値そのものではなく、検出値の積分値を取って、その差を予め設定された衝突形態判断用閾値と比較することにより衝突形態11を判断するようにしている。そのために、衝突形態判断部12の内部には、図示しない積分器が設けられる。
【0039】
検出値の(積分値の)差が大きくなる衝突形態11は、例えば、上記したオフセット衝突や、斜め衝突(いわゆる斜突)などである。
【0040】
(構成2)
上記タイミング調整部14は、閾値を上げることによって、副作動信号13の出力を遅らせるものとされる。
【0041】
ここで、タイミング調整部14は、中央加速度センサ4cからの検出値(の積分値)が予め設定された閾値(タイミング調整用閾値)を越えた時に副作動信号13を出力するよう構成されている。タイミング調整部14は、衝突形態11に応じてタイマーなどで副作動信号13を一律に遅らせるようにすることもできるが、この場合には、上記した閾値を上げることによって対応するように構成されている。
【0042】
<作用>以下、この実施例の作用について説明する。
【0043】
車体に設けられた複数の加速度センサ4からの検出値(またはその積分値)に基づいて、制御装置6が乗員保護装置2へ作動指令5を出力し、乗員保護装置2を作動させることにより、乗員を保護する。
【0044】
この際、加速度センサ4が、少なくとも、車体の前側に車幅方向へ離間した状態で配置された複数の前側加速度センサ4a,4bを有し、複数の前側加速度センサ4a,4bで車両前後方向7の加速度を検出することにより、車両1の(衝突形態に拘わらず)衝突の発生などを素早く正確に検出することができる。
【0045】
また、制御装置6が、主制御部9によって車両1の衝突を総合的に判断して主作動信号8を出力するようにしたことにより、乗員保護装置2を(作動が必要な時に)正しく作動させることができる。
【0046】
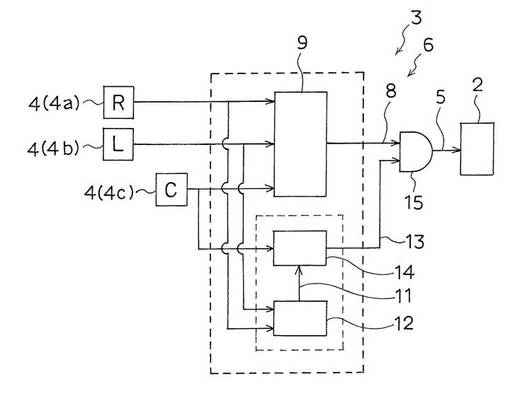
上記を図3のフローチャートを用いて説明する。この図は、この実施例の制御の流れを示すものである。このフローチャートは、車両1の前側で実際に衝突が発生することによって開始される。
【0047】
すると、先ず、S1(ステップ1)で、主制御部9によって、(乗員保護装置2を作動させるような)衝突を検知したかどうかが判断される。この衝突の検知は、全ての加速度センサ4からの検出値を用いて行われる。なお、この検出値は、ノイズカットフィルターやその他のフィルターを通して調整されたものとすることができる。
【0048】
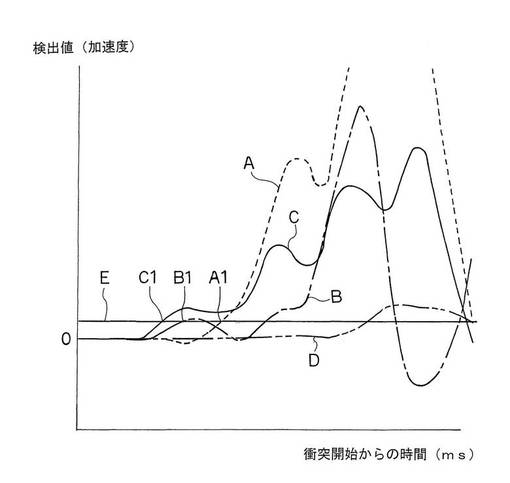
図4は、主制御部9による衝突判断の状況を示すグラフである。図の横軸は衝突発生(衝突開始)からの時間、縦軸は加速度センサ4の検出値(加速度)である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも乗員保護装置2の作動が必要となる検出値を示している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の検出値である。そして、線Eは、乗員保護装置2を作動させる衝突か、乗員保護装置2を不作動とする衝突かを決めるための閾値(衝突判断用閾値)である。この閾値Eは、一定の値を取る水平な線とされている。
【0049】
図4によれば、いずれか1つの加速度センサ4(前側加速度センサ4a,4bおよび中央加速度センサ4c)が先行して衝突を検知する斜め衝突Cと、オフセット衝突Bとが先に閾値Eを越え(点C1,B1)、その後から複数の加速度センサ4がほぼ同時に衝突を検知するフルラップ前面衝突Aが閾値Eを越えている(点A1)。よって、この順に、乗員保護装置2を作動させるための主制御部9の内部制御が開始される(トリガー開始またはトリガーオン)。これにより、主制御部9では、車両1の衝突を総合的に判断して出力制御部15に主作動信号8を出力することになる。よって、主作動信号8は、おおむね上記した順に出力されることになる。即ち、主制御部9の内部制御が早く始まる斜め衝突Cと、オフセット衝突Bは、フルラップ前面衝突Aよりも早く主作動信号8が出力されることになる。
【0050】
次に、上記したように図3のS1(ステップ1)で衝突を検知した場合には、図3のS2(ステップ2)で、衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の積分値の差の絶対値を算出する。なお、図3のS1(ステップ1)で衝突を検知しなかった場合には、S2(ステップ2)以降の制御は行われない。
【0051】
そして、S3(ステップ3)で、衝突形態判断部12が、S2で算出した複数の前側加速度センサ4a,4bの検出値の積分値の差に基づいて衝突形態11を判断する。
【0052】
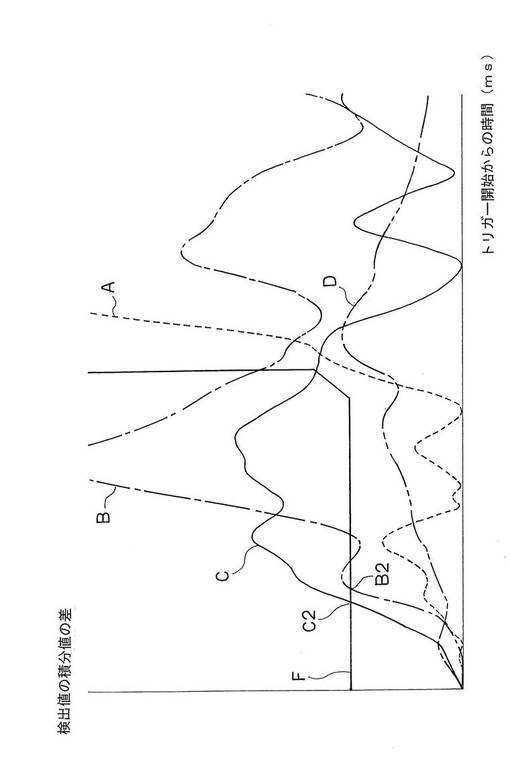
図5は、衝突形態判断部12による衝突形態11の判断の状況を示すグラフである。図の横軸は衝突判断(トリガー開始またはトリガーオン)からの時間(衝突発生からの時間ではない)、縦軸は複数の前側加速度センサ4a,4bの検出値の積分値の差である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも図4のものと対応している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の積分値の差である。線Dも図4のものと対応している。そして、線Fは、衝突形態11を判断するための閾値(衝突形態判断用閾値)である。この閾値Fは、フルラップ前面衝突Aと、オフセット衝突Bおよび斜め衝突Cとを切り分けるためのものである。そのために、閾値Fは、一定時間の間一定の値を取る水平部と、一定時間の経過後にほぼ垂直に立ち上がる垂直部を有する、ほぼL字型のものとされる。この場合には、斜め衝突Cとオフセット衝突Bとは順に閾値Fを越え(点C2,B2)、フルラップ前面衝突Aと線Dとは閾値Fを越えないこととなる。ここで、図の横軸は、衝突判断(トリガー開始またはトリガーオン)からの時間となっているが、図4の衝突発生からの時間と合わせると、オフセット衝突Bおよび斜め衝突Cは、フルラップ前面衝突Aと比べて検知するまでの時間が短いことが分かる。
【0053】
そして、S3で閾値Fを越えた場合には、図3のS4(ステップ4)で、タイミング調整部14が、閾値を上げる(閾値Gから閾値Hに変更する(図6参照))ことによって、副作動信号13の出力を調整する(遅らせる)ようにする。その後、S5へ進んで、出力制御部15が副作動信号13の発生を待って乗員保護装置2へ作動指令5を出力する。
【0054】
反対に、S3で閾値Fを越えない場合には、S6(ステップ6)で、タイミング調整部14が、閾値を変えない(閾値Gのままとする(図6参照))ことによって、副作動信号13が通常のタイミングで出力されるようにする。その後、S7へ進んで、出力制御部15が副作動信号13の発生を待って乗員保護装置2へ作動指令5を出力する。
【0055】
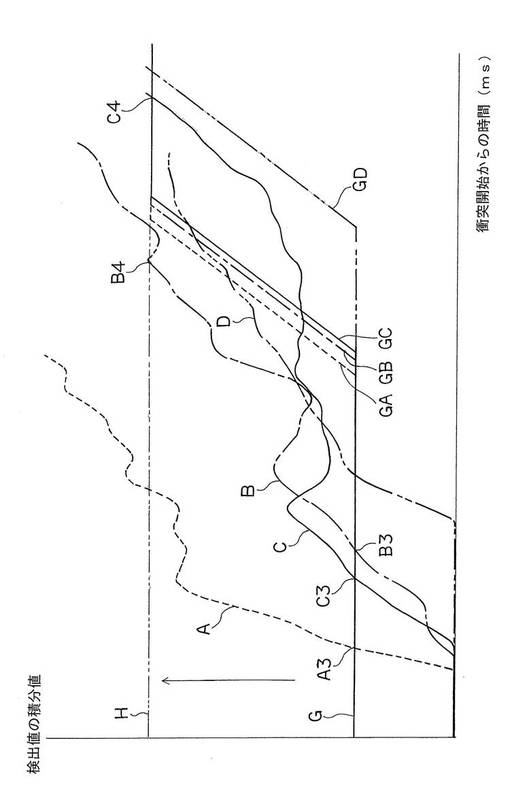
ここで、図6は、タイミング調整部14によるS4およびS6のタイミング調整の状況を示すグラフである。図の横軸は衝突発生(衝突開始)からの時間、縦軸は中央加速度センサ4cの検出値の積分値である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも図4、図5のものと対応している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の積分値の差である。線Dも図4、図5のものと対応している。そして、線Gはタイミング調整を行うための閾値(タイミング調整用閾値)である。この閾値Gは、一定時間の間一定の値を取る水平部と、一定時間の経過後にほぼ斜めに立ち上がる傾斜部と、その後一定の値を取る第二の水平部とを有する、ほぼ段差状のものとされる。なお、閾値Gの斜めに立ち上がる部分は、フルラップ前面衝突Aや、オフセット衝突Bや、斜め衝突Cなどの衝突形態11によって若干異なるものとされている(閾値GA、閾値GB、閾値GC)。また、線Hは、タイミングを遅らせるために変更される変更用の閾値H(タイミング変更(遅延)用閾値)である。この閾値Hは、上記した閾値Gの水平部よりも値の大きな水平部を有するものなどとされる。但し、閾値Hの値や形状などは、これに限るものではない。
【0056】
この場合には、斜め衝突Cとオフセット衝突Bとが変更された閾値Hで判断され、フルラップ前面衝突Aと線Dとは閾値Gのままで判断される。なお、閾値Gから閾値Hへの変更は、斜め衝突Cとオフセット衝突Bとが、図5で閾値Fを越えてから(点C2,B2)、図6で変更前の閾値Gを越える(点C3,B3)までの間の極く僅かな時間(およそ1〜2ms程度)の間に行われることとなる。そして、乗員により近い位置に設置された中央加速度センサ4cの検出値によると、先にフルラップ前面衝突Aが閾値Gを越え、後から斜め衝突Cとオフセット衝突Bとが閾値Gを越えるように、図4や図5の場合とは順番が逆転しているが、これだけでは乗員保護装置2の作動タイミングがまだ早いので、衝突Cやオフセット衝突Bの場合については、更に閾値Gを閾値Hに変更して判断を遅らせるようにしている。
【0057】
よって、図6によれば、S4の場合、オフセット衝突Bは、点B4で閾値Hを越えた時に、また、斜め衝突Cは、点C4で閾値Hを越えた時に、上記した副作動信号13が出力されるようにタイミング調整がなされる。これに対し、S6の場合、フルラップ前面衝突Aは、点A3で閾値Gを越えた時に、上記した副作動信号13が出力されることとなる。
【0058】
その結果、S4の場合には、S5(ステップ5)において、図2の出力制御部15におけるアンド条件が成立するのが遅くなるので、出力制御部15からの作動指令5の出力も遅くなり、以って、斜め衝突Cやオフセット衝突Bの場合に、乗員保護装置2の作動タイミングを遅らせる調整がなされて、上記したような最適な作動タイミングが得られることになる。
【0059】
これに対し、S6の場合には、S7(ステップ7)において、出力制御部15におけるアンド条件の成立が遅らされず、作動指令5の出力も遅れることがないので、フルラップ前面衝突Aの場合には、乗員保護装置2の作動タイミングが調整されずに、これまで通りに、最適な作動タイミングが得られることになる。
【0060】
なお、S4、S5で作動タイミングを遅らされるのは、オフセット衝突Bや斜め衝突Cの全てではなく、これらのうち、前側加速度センサ4a,4bの検出値の(積分値の)差が特に大きくなって閾値F(衝突形態判断用閾値)を越えるような衝突形態11に限られる。オフセット衝突Bや斜め衝突Cであっても、閾値F(衝突形態判断用閾値)を越えないような衝突形態11の場合には、作動タイミングの調整が行なわれないのは勿論である。
【0061】
<効果>この実施例によれば、以下のような効果を得ることができる。
【0062】
(作用効果1)
制御装置6が、衝突形態判断部12を備えたことにより、複数の前側加速度センサ4a,4bの検出値に基づいて車両1の衝突形態11を判断することができる。
【0063】
また、タイミング調整部14を備えたことにより、衝突形態判断部12が判断した車両1の衝突形態11に応じたタイミングで副作動信号13を出力させるようにすることができる。
【0064】
更に、出力制御部15を備えたことにより、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力させるようにすることができる。
【0065】
これにより、主制御部9からの主作動信号8に対し、タイミング調整部14からの副作動信号13(の出力タイミング)によってタイミング調整することが可能となる。以って、車両1の衝突形態11に応じて最適タイミングで乗員保護装置2を作動させることができる。
【0066】
(作用効果1a)
更に、衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の差に基づいて衝突形態11を判断することにより、複数の前側加速度センサ4a,4bの位置関係を利用して車両1の衝突形態11を正確に判断することが可能となる。
【0067】
タイミング調整部14が、上記した複数の前側加速度センサ4a,4bの検出値の差が大きくなる衝突形態11の場合に、副作動信号13を出力するタイミングを遅らせることにより、複数の前側加速度センサ4a,4bでの検出タイミングや検出値が大きくズレる衝突形態11の場合に、作動タイミングを適正化することが可能となる。
【0068】
(作用効果2)
タイミング調整部14が、閾値を上げることによって、副作動信号13の出力を遅らせることにより、閾値の変更だけで衝突形態11に応じた最適な作動タイミングを得ることができる。また、副作動信号13の出力を遅らせるために、特別な遅延手段(例えば、タイマーなど)を用意する必要をなくすことができる。
【0069】
以上、この発明の実施例を図面により詳述してきたが、実施例はこの発明の例示にしか過ぎないものであるため、この発明は実施例の構成にのみ限定されるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があってもこの発明に含まれることは勿論である。また、例えば、各実施例に複数の構成が含まれている場合には、特に記載がなくとも、これらの構成の可能な組合せが含まれることは勿論である。また、複数の実施例や変形例が示されている場合には、特に記載がなくとも、これらに跨がった構成の組合せのうちの可能なものが含まれることは勿論である。また、図面に描かれている構成については、特に記載がなくとも、含まれることは勿論である。更に、「等」の用語がある場合には、同等のものを含むという意味で用いられている。また、「ほぼ」「約」「程度」などの用語がある場合には、常識的に認められる範囲や精度のものを含むという意味で用いられている。
【符号の説明】
【0070】
2 乗員保護装置
3 乗員保護装置制御システム
4 加速度センサ4
4a,4b 前側加速度センサ
5 作動指令
6 制御装置
7 車両前後方向
8 主作動信号
9 主制御部
11 衝突形態
12 衝突形態判断部
13 副作動信号
14 タイミング調整部
E〜H 閾値
【技術分野】
【0001】
この発明は、乗員保護装置制御システムに関するものである。
【背景技術】
【0002】
自動車などの車両には、緊急時に乗員を保護するための乗員保護装置が設けられている。そして、上記した乗員保護装置を作動させるための乗員保護装置制御システムも設けられている(例えば、特許文献1参照)。
【0003】
上記した乗員保護装置には、例えば、エアバッグ装置やシートベルト拘束装置などが存在している。また、上記した乗員保護装置制御システムは、車体に設けられた加速度センサと、加速度センサからの検出値に基づき、乗員保護装置へ作動指令を出力する制御装置とを備えている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−196589号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記乗員保護装置制御システムには、以下のような問題があった。
【0006】
乗員保護装置の作動タイミングは、例えば、乗員の頭部が3インチ〜5インチ程度移動した時が最適であるなどとされている。
【0007】
一方、車両の衝突形態には、例えば、フルラップ前面衝突(真正面衝突)や、オフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの各種のものがあり、通常は、上記したフルラップ前面衝突の場合に、上記した最適な作動タイミングが得られるように構成されている。
【0008】
そして、上記したオフセット衝突や斜め衝突などの各種の衝突形態を検知できるようにするために、上記した加速度センサ(いわゆる、主加速度センサ)に加え、追加の加速度センサを設けて、加速度センサを複数化することによって、検知精度を高めることが行われている。
【0009】
しかし、上記した乗員保護装置の作動タイミングは、上記した各衝突形態によってそれぞれ異なるものであるため、複数の加速度センサを設けて各種の衝突形態を検知できるようにしただけでは、まだ充分ではない。
【0010】
即ち、例えば、上記したように加速度センサを複数備えた場合、いずれか1つの加速度センサが先行して衝突を検知するオフセット衝突や斜め衝突の時に、複数の加速度センサがほぼ同時に衝突を検知するフルラップ前面衝突の時よりも、制御の開始が早くなるので、結果として乗員保護装置の作動タイミングが早くなる傾向があった。これは、加速度センサを複数備えることによって検知精度が高められたことにより新たに生じた問題とも言うことができる。
【課題を解決するための手段】
【0011】
上記課題を解決するために、請求項1に記載された発明は、車体の前側に車幅方向へ離間配置されて車両前後方向の加速度を検出可能な複数の前側加速度センサ、を含む複数の加速度センサと、該各加速度センサからの検出値に基づき車両の衝突を判断して乗員保護装置へ作動指令を出力する制御装置とを備えた乗員保護装置制御システムにおいて、前記制御装置が、主作動信号を出力する主制御部と、前記複数の前側加速度センサの検出値の差に基づいて車両の衝突形態を判断する衝突形態判断部と、該衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力すると共に、前記複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、前記副作動信号を出力するタイミングを遅らせるタイミング調整部と、前記主制御部からの主作動信号と前記タイミング調整部からの副作動信号との両方が入力された時に前記作動指令を出力する出力制御部とを備えたことを特徴としている。
【0012】
請求項2に記載された発明は、上記において、前記タイミング調整部は、閾値を上げることによって、前記副作動信号の出力を遅らせることを特徴としている。
【発明の効果】
【0013】
請求項1の発明によれば、上記構成によって、以下のような作用効果を得ることができる。即ち、制御装置が、衝突形態判断部を備えたことにより、複数の前側加速度センサの検出値に基づいて車両の衝突形態を判断することができる。また、タイミング調整部を備えたことにより、衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力させるようにすることができる。更に、出力制御部を備えたことにより、主制御部からの主作動信号とタイミング調整部からの副作動信号との両方が入力された時に作動指令を出力させるようにすることができる。これにより、主制御部からの主作動信号に対し、タイミング調整部からの副作動信号によってタイミング調整することが可能となる。以って、車両の衝突形態に応じて最適タイミングで乗員保護装置を作動させることができる。上記において、衝突形態判断部が、複数の前側加速度センサの検出値の差に基づいて衝突形態を判断することにより、複数の前側加速度センサの位置関係を利用して車両の衝突形態を正確に判断することが可能となる。また、タイミング調整部が、上記した複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、副作動信号を出力するタイミングを遅らせることにより、複数の前側加速度センサでの検出タイミングや検出値が大きくズレる衝突形態の場合に、作動タイミングを適正化することが可能となる。
【0014】
請求項2の発明によれば、上記構成によって、以下のような作用効果を得ることができる。即ち、タイミング調整部が、閾値を上げることによって、副作動信号の出力を遅らせることにより、閾値の変更だけで衝突形態に応じた最適な作動タイミングを得ることができる。また、副作動信号の出力を遅らせるために、特別な遅延手段を用意する必要をなくすことができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施例にかかる乗員保護装置制御システムを備えた車両の概略平面図である。
【図2】図1の乗員保護装置制御システムの系統図である。
【図3】図2の乗員保護装置制御システムによる制御の流れを示すフローチャートである。
【図4】主制御部による衝突判断の状況を示すグラフである。
【図5】衝突形態判断部による衝突形態の判断の状況を示すグラフである。
【図6】タイミング調整部によるタイミング調整の状況を示すグラフである。
【発明を実施するための形態】
【0016】
以下、本実施の形態を具体化した実施例を、図面を用いて詳細に説明する。
【0017】
図1〜図6は、この実施例およびその変形例を示すものである。
【実施例】
【0018】
<構成>以下、構成について説明する。
【0019】
図1に示すように、自動車などの車両1には、緊急時に乗員を保護するための乗員保護装置2が設けられている。上記した乗員保護装置2には、例えば、エアバッグ装置(運転席側エアバッグ装置2a、助手席側エアバッグ装置2b)やシートベルト拘束装置などが存在している。
【0020】
そして、この乗員保護装置2を作動させる乗員保護装置制御システム3が設けられている。
【0021】
上記した乗員保護装置制御システム3は、以下の構成を備えている。
【0022】
即ち、乗員保護装置制御システム3は、車体に設けられた複数の加速度センサ4と、各加速度センサ4からの検出値に基づき、乗員保護装置2へ作動指令5を出力する制御装置6とを備えている。
そして、上記した加速度センサ4が、少なくとも、車体の前側に車幅方向へ離間した状態で配置されて、車両前後方向7の加速度を検出可能な複数の前側加速度センサ4a,4bを有している。また、上記した制御装置6が、図2に示すように、車両1の衝突を判断して主作動信号8を出力する主制御部9を有している。
【0023】
ここで、前側とは、車両前後方向7を基準とした前側のことである。前側加速度センサ4a,4bは、通常、フロントバンパーの両側部に左右一対取り付けられている。但し、前側加速度センサ4a,4bの設置位置や設置個数はこれに限るものではない。
【0024】
また、加速度センサ4には、上記の他に、車両前後方向7のほぼ中間部で、車幅方向のほぼ中央部などに配置されて、車幅方向の加速度を検出可能な中央加速度センサ4c(主加速度センサ)なども備えられている。この中央加速度センサ4cは、乗員保護装置制御システム3において、最も早く採用された加速度センサ4の1つである。これに対し、上記した前側加速度センサ4a,4bは、後述するオフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの様々な衝突形態を検出するために、後から設置されることになったものである。中央加速度センサ4cは、前側加速度センサ4a,4bよりも、乗員に近い位置に設置される。
【0025】
上記した制御装置6は、車両1の中央部や前部座席の下などに設けられる。但し、制御装置6の設置位置は、これに限るものではない。制御装置6は、例えば、ワンチップマイコンと制御用ソフトウェアなどによって構成される。
【0026】
上記した主制御部9には、前側加速度センサ4a,4bおよび中央加速度センサ4cからの検出値が入力される。主制御部9は、上記した各加速度センサ4からの検出値を基に車両1の衝突を総合的に判断して、乗員保護装置2を作動させるかどうかの最終判断を行うものである。
【0027】
なお、乗員保護装置2の作動タイミングには、最適な作動タイミングがあり、例えば、乗員の頭部が3インチ〜5インチ程度移動した時などとされている。但し、最適な作動タイミングは、これに限るものではなく、装置構成などによって異なる場合がある。
【0028】
また、車両1の衝突形態(或いは、衝突条件、衝突状況)には、例えば、フルラップ前面衝突(真正面衝突)や、オフセット衝突(横ズレ正面衝突)や、斜め衝突(いわゆる斜突)などの各種のものがある。そして、主制御部9は、フルラップ前面衝突の場合に、上記したような最適な作動タイミングが得られるように制御を行っている。
【0029】
そして、以上のような基本構成に対し、この実施例のものでは、以下のような構成を備えるようにしている。
【0030】
(構成1)
上記した制御装置6が、複数の前側加速度センサ4a,4bの検出値から車両1の衝突形態11を判断する衝突形態判断部12を備えるようにする。
【0031】
また、この衝突形態判断部12が判断した車両1の衝突形態11に応じたタイミングで副作動信号13を出力するタイミング調整部14を備えるようにする。
【0032】
更に、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力する出力制御部15を備えるようにする。
【0033】
ここで、タイミング調整部14には、上記した中央加速度センサ4cからの検出値そのものではなく、検出値の積分値が使われるように構成されている。そのために、タイミング調整部14の内部には、図示しない積分器が設けられる。
【0034】
衝突形態判断部12とタイミング調整部14とによって、乗員保護装置2の作動タイミングを調整可能な副制御部(タイミング調整用制御部)が構成される。
【0035】
出力制御部15は、最終的に乗員保護装置2の作動、不作動を決定する作動判断回路として機能する。この場合、出力制御部15は、アンド回路とされている。
【0036】
(構成1a)
更に、上記した衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の差に基づいて衝突形態11を判断するものとされる。
【0037】
そして、上記タイミング調整部14が、上記した複数の前側加速度センサ4a,4bの検出値の差が大きくなる衝突形態11の場合に、副作動信号13を出力するタイミングを(通常よりも)遅らせるよう構成される。
【0038】
ここで、衝突形態判断部12は、各前側加速度センサ4a,4bの検出値そのものではなく、検出値の積分値を取って、その差を予め設定された衝突形態判断用閾値と比較することにより衝突形態11を判断するようにしている。そのために、衝突形態判断部12の内部には、図示しない積分器が設けられる。
【0039】
検出値の(積分値の)差が大きくなる衝突形態11は、例えば、上記したオフセット衝突や、斜め衝突(いわゆる斜突)などである。
【0040】
(構成2)
上記タイミング調整部14は、閾値を上げることによって、副作動信号13の出力を遅らせるものとされる。
【0041】
ここで、タイミング調整部14は、中央加速度センサ4cからの検出値(の積分値)が予め設定された閾値(タイミング調整用閾値)を越えた時に副作動信号13を出力するよう構成されている。タイミング調整部14は、衝突形態11に応じてタイマーなどで副作動信号13を一律に遅らせるようにすることもできるが、この場合には、上記した閾値を上げることによって対応するように構成されている。
【0042】
<作用>以下、この実施例の作用について説明する。
【0043】
車体に設けられた複数の加速度センサ4からの検出値(またはその積分値)に基づいて、制御装置6が乗員保護装置2へ作動指令5を出力し、乗員保護装置2を作動させることにより、乗員を保護する。
【0044】
この際、加速度センサ4が、少なくとも、車体の前側に車幅方向へ離間した状態で配置された複数の前側加速度センサ4a,4bを有し、複数の前側加速度センサ4a,4bで車両前後方向7の加速度を検出することにより、車両1の(衝突形態に拘わらず)衝突の発生などを素早く正確に検出することができる。
【0045】
また、制御装置6が、主制御部9によって車両1の衝突を総合的に判断して主作動信号8を出力するようにしたことにより、乗員保護装置2を(作動が必要な時に)正しく作動させることができる。
【0046】
上記を図3のフローチャートを用いて説明する。この図は、この実施例の制御の流れを示すものである。このフローチャートは、車両1の前側で実際に衝突が発生することによって開始される。
【0047】
すると、先ず、S1(ステップ1)で、主制御部9によって、(乗員保護装置2を作動させるような)衝突を検知したかどうかが判断される。この衝突の検知は、全ての加速度センサ4からの検出値を用いて行われる。なお、この検出値は、ノイズカットフィルターやその他のフィルターを通して調整されたものとすることができる。
【0048】
図4は、主制御部9による衝突判断の状況を示すグラフである。図の横軸は衝突発生(衝突開始)からの時間、縦軸は加速度センサ4の検出値(加速度)である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも乗員保護装置2の作動が必要となる検出値を示している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の検出値である。そして、線Eは、乗員保護装置2を作動させる衝突か、乗員保護装置2を不作動とする衝突かを決めるための閾値(衝突判断用閾値)である。この閾値Eは、一定の値を取る水平な線とされている。
【0049】
図4によれば、いずれか1つの加速度センサ4(前側加速度センサ4a,4bおよび中央加速度センサ4c)が先行して衝突を検知する斜め衝突Cと、オフセット衝突Bとが先に閾値Eを越え(点C1,B1)、その後から複数の加速度センサ4がほぼ同時に衝突を検知するフルラップ前面衝突Aが閾値Eを越えている(点A1)。よって、この順に、乗員保護装置2を作動させるための主制御部9の内部制御が開始される(トリガー開始またはトリガーオン)。これにより、主制御部9では、車両1の衝突を総合的に判断して出力制御部15に主作動信号8を出力することになる。よって、主作動信号8は、おおむね上記した順に出力されることになる。即ち、主制御部9の内部制御が早く始まる斜め衝突Cと、オフセット衝突Bは、フルラップ前面衝突Aよりも早く主作動信号8が出力されることになる。
【0050】
次に、上記したように図3のS1(ステップ1)で衝突を検知した場合には、図3のS2(ステップ2)で、衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の積分値の差の絶対値を算出する。なお、図3のS1(ステップ1)で衝突を検知しなかった場合には、S2(ステップ2)以降の制御は行われない。
【0051】
そして、S3(ステップ3)で、衝突形態判断部12が、S2で算出した複数の前側加速度センサ4a,4bの検出値の積分値の差に基づいて衝突形態11を判断する。
【0052】
図5は、衝突形態判断部12による衝突形態11の判断の状況を示すグラフである。図の横軸は衝突判断(トリガー開始またはトリガーオン)からの時間(衝突発生からの時間ではない)、縦軸は複数の前側加速度センサ4a,4bの検出値の積分値の差である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも図4のものと対応している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の積分値の差である。線Dも図4のものと対応している。そして、線Fは、衝突形態11を判断するための閾値(衝突形態判断用閾値)である。この閾値Fは、フルラップ前面衝突Aと、オフセット衝突Bおよび斜め衝突Cとを切り分けるためのものである。そのために、閾値Fは、一定時間の間一定の値を取る水平部と、一定時間の経過後にほぼ垂直に立ち上がる垂直部を有する、ほぼL字型のものとされる。この場合には、斜め衝突Cとオフセット衝突Bとは順に閾値Fを越え(点C2,B2)、フルラップ前面衝突Aと線Dとは閾値Fを越えないこととなる。ここで、図の横軸は、衝突判断(トリガー開始またはトリガーオン)からの時間となっているが、図4の衝突発生からの時間と合わせると、オフセット衝突Bおよび斜め衝突Cは、フルラップ前面衝突Aと比べて検知するまでの時間が短いことが分かる。
【0053】
そして、S3で閾値Fを越えた場合には、図3のS4(ステップ4)で、タイミング調整部14が、閾値を上げる(閾値Gから閾値Hに変更する(図6参照))ことによって、副作動信号13の出力を調整する(遅らせる)ようにする。その後、S5へ進んで、出力制御部15が副作動信号13の発生を待って乗員保護装置2へ作動指令5を出力する。
【0054】
反対に、S3で閾値Fを越えない場合には、S6(ステップ6)で、タイミング調整部14が、閾値を変えない(閾値Gのままとする(図6参照))ことによって、副作動信号13が通常のタイミングで出力されるようにする。その後、S7へ進んで、出力制御部15が副作動信号13の発生を待って乗員保護装置2へ作動指令5を出力する。
【0055】
ここで、図6は、タイミング調整部14によるS4およびS6のタイミング調整の状況を示すグラフである。図の横軸は衝突発生(衝突開始)からの時間、縦軸は中央加速度センサ4cの検出値の積分値である。また、図中、線Aがフルラップ前面衝突、線Bがオフセット衝突、線Cが斜め衝突であり、いずれも図4、図5のものと対応している。これに対し、線Dは、参考用に乗員保護装置2が不作動となる場合の積分値の差である。線Dも図4、図5のものと対応している。そして、線Gはタイミング調整を行うための閾値(タイミング調整用閾値)である。この閾値Gは、一定時間の間一定の値を取る水平部と、一定時間の経過後にほぼ斜めに立ち上がる傾斜部と、その後一定の値を取る第二の水平部とを有する、ほぼ段差状のものとされる。なお、閾値Gの斜めに立ち上がる部分は、フルラップ前面衝突Aや、オフセット衝突Bや、斜め衝突Cなどの衝突形態11によって若干異なるものとされている(閾値GA、閾値GB、閾値GC)。また、線Hは、タイミングを遅らせるために変更される変更用の閾値H(タイミング変更(遅延)用閾値)である。この閾値Hは、上記した閾値Gの水平部よりも値の大きな水平部を有するものなどとされる。但し、閾値Hの値や形状などは、これに限るものではない。
【0056】
この場合には、斜め衝突Cとオフセット衝突Bとが変更された閾値Hで判断され、フルラップ前面衝突Aと線Dとは閾値Gのままで判断される。なお、閾値Gから閾値Hへの変更は、斜め衝突Cとオフセット衝突Bとが、図5で閾値Fを越えてから(点C2,B2)、図6で変更前の閾値Gを越える(点C3,B3)までの間の極く僅かな時間(およそ1〜2ms程度)の間に行われることとなる。そして、乗員により近い位置に設置された中央加速度センサ4cの検出値によると、先にフルラップ前面衝突Aが閾値Gを越え、後から斜め衝突Cとオフセット衝突Bとが閾値Gを越えるように、図4や図5の場合とは順番が逆転しているが、これだけでは乗員保護装置2の作動タイミングがまだ早いので、衝突Cやオフセット衝突Bの場合については、更に閾値Gを閾値Hに変更して判断を遅らせるようにしている。
【0057】
よって、図6によれば、S4の場合、オフセット衝突Bは、点B4で閾値Hを越えた時に、また、斜め衝突Cは、点C4で閾値Hを越えた時に、上記した副作動信号13が出力されるようにタイミング調整がなされる。これに対し、S6の場合、フルラップ前面衝突Aは、点A3で閾値Gを越えた時に、上記した副作動信号13が出力されることとなる。
【0058】
その結果、S4の場合には、S5(ステップ5)において、図2の出力制御部15におけるアンド条件が成立するのが遅くなるので、出力制御部15からの作動指令5の出力も遅くなり、以って、斜め衝突Cやオフセット衝突Bの場合に、乗員保護装置2の作動タイミングを遅らせる調整がなされて、上記したような最適な作動タイミングが得られることになる。
【0059】
これに対し、S6の場合には、S7(ステップ7)において、出力制御部15におけるアンド条件の成立が遅らされず、作動指令5の出力も遅れることがないので、フルラップ前面衝突Aの場合には、乗員保護装置2の作動タイミングが調整されずに、これまで通りに、最適な作動タイミングが得られることになる。
【0060】
なお、S4、S5で作動タイミングを遅らされるのは、オフセット衝突Bや斜め衝突Cの全てではなく、これらのうち、前側加速度センサ4a,4bの検出値の(積分値の)差が特に大きくなって閾値F(衝突形態判断用閾値)を越えるような衝突形態11に限られる。オフセット衝突Bや斜め衝突Cであっても、閾値F(衝突形態判断用閾値)を越えないような衝突形態11の場合には、作動タイミングの調整が行なわれないのは勿論である。
【0061】
<効果>この実施例によれば、以下のような効果を得ることができる。
【0062】
(作用効果1)
制御装置6が、衝突形態判断部12を備えたことにより、複数の前側加速度センサ4a,4bの検出値に基づいて車両1の衝突形態11を判断することができる。
【0063】
また、タイミング調整部14を備えたことにより、衝突形態判断部12が判断した車両1の衝突形態11に応じたタイミングで副作動信号13を出力させるようにすることができる。
【0064】
更に、出力制御部15を備えたことにより、主制御部9からの主作動信号8とタイミング調整部14からの副作動信号13との両方が入力された時に作動指令5を出力させるようにすることができる。
【0065】
これにより、主制御部9からの主作動信号8に対し、タイミング調整部14からの副作動信号13(の出力タイミング)によってタイミング調整することが可能となる。以って、車両1の衝突形態11に応じて最適タイミングで乗員保護装置2を作動させることができる。
【0066】
(作用効果1a)
更に、衝突形態判断部12が、複数の前側加速度センサ4a,4bの検出値の差に基づいて衝突形態11を判断することにより、複数の前側加速度センサ4a,4bの位置関係を利用して車両1の衝突形態11を正確に判断することが可能となる。
【0067】
タイミング調整部14が、上記した複数の前側加速度センサ4a,4bの検出値の差が大きくなる衝突形態11の場合に、副作動信号13を出力するタイミングを遅らせることにより、複数の前側加速度センサ4a,4bでの検出タイミングや検出値が大きくズレる衝突形態11の場合に、作動タイミングを適正化することが可能となる。
【0068】
(作用効果2)
タイミング調整部14が、閾値を上げることによって、副作動信号13の出力を遅らせることにより、閾値の変更だけで衝突形態11に応じた最適な作動タイミングを得ることができる。また、副作動信号13の出力を遅らせるために、特別な遅延手段(例えば、タイマーなど)を用意する必要をなくすことができる。
【0069】
以上、この発明の実施例を図面により詳述してきたが、実施例はこの発明の例示にしか過ぎないものであるため、この発明は実施例の構成にのみ限定されるものではなく、この発明の要旨を逸脱しない範囲の設計の変更等があってもこの発明に含まれることは勿論である。また、例えば、各実施例に複数の構成が含まれている場合には、特に記載がなくとも、これらの構成の可能な組合せが含まれることは勿論である。また、複数の実施例や変形例が示されている場合には、特に記載がなくとも、これらに跨がった構成の組合せのうちの可能なものが含まれることは勿論である。また、図面に描かれている構成については、特に記載がなくとも、含まれることは勿論である。更に、「等」の用語がある場合には、同等のものを含むという意味で用いられている。また、「ほぼ」「約」「程度」などの用語がある場合には、常識的に認められる範囲や精度のものを含むという意味で用いられている。
【符号の説明】
【0070】
2 乗員保護装置
3 乗員保護装置制御システム
4 加速度センサ4
4a,4b 前側加速度センサ
5 作動指令
6 制御装置
7 車両前後方向
8 主作動信号
9 主制御部
11 衝突形態
12 衝突形態判断部
13 副作動信号
14 タイミング調整部
E〜H 閾値
【特許請求の範囲】
【請求項1】
車体の前側に車幅方向へ離間配置されて車両前後方向の加速度を検出可能な複数の前側加速度センサ、を含む複数の加速度センサと、
該各加速度センサからの検出値に基づき車両の衝突を判断して乗員保護装置へ作動指令を出力する制御装置とを備えた乗員保護装置制御システムにおいて、
前記制御装置が、
主作動信号を出力する主制御部と、
前記複数の前側加速度センサの検出値の差に基づいて車両の衝突形態を判断する衝突形態判断部と、
該衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力すると共に、前記複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、前記副作動信号を出力するタイミングを遅らせるタイミング調整部と、
前記主制御部からの主作動信号と前記タイミング調整部からの副作動信号との両方が入力された時に前記作動指令を出力する出力制御部とを備えたことを特徴とする乗員保護装置制御システム。
【請求項2】
前記タイミング調整部は、閾値を上げることによって、前記副作動信号の出力を遅らせることを特徴とする請求項1記載の乗員保護装置制御システム。
【請求項1】
車体の前側に車幅方向へ離間配置されて車両前後方向の加速度を検出可能な複数の前側加速度センサ、を含む複数の加速度センサと、
該各加速度センサからの検出値に基づき車両の衝突を判断して乗員保護装置へ作動指令を出力する制御装置とを備えた乗員保護装置制御システムにおいて、
前記制御装置が、
主作動信号を出力する主制御部と、
前記複数の前側加速度センサの検出値の差に基づいて車両の衝突形態を判断する衝突形態判断部と、
該衝突形態判断部が判断した車両の衝突形態に応じたタイミングで副作動信号を出力すると共に、前記複数の前側加速度センサの検出値の差が大きくなる衝突形態の場合に、前記副作動信号を出力するタイミングを遅らせるタイミング調整部と、
前記主制御部からの主作動信号と前記タイミング調整部からの副作動信号との両方が入力された時に前記作動指令を出力する出力制御部とを備えたことを特徴とする乗員保護装置制御システム。
【請求項2】
前記タイミング調整部は、閾値を上げることによって、前記副作動信号の出力を遅らせることを特徴とする請求項1記載の乗員保護装置制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−103629(P2013−103629A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249466(P2011−249466)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000004765)カルソニックカンセイ株式会社 (3,404)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000004765)カルソニックカンセイ株式会社 (3,404)
[ Back to top ]