
乗客コンベアの手摺駆動用伝達条体の弛み量測定装置
【課題】本発明は、保守作業員による手摺駆動用伝達条体の弛み量の確認作業を不要とすることができ、乗客コンベアの保守点検の作業効率を向上させることができるとともに、手摺駆動用伝達条体の弛み量の測定精度を向上させることができる乗客コンベアの手摺駆動用伝達条体の弛み量測定装置を得ることを目的とするものである。
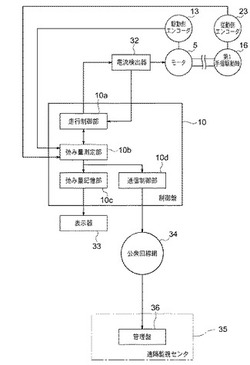
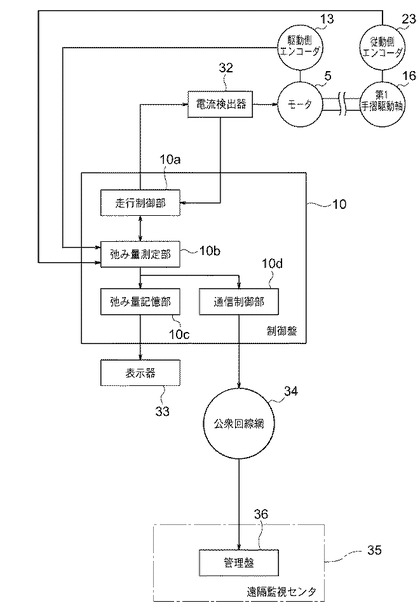
【解決手段】制御盤10は、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dを有している。弛み量測定部10bは、駆動側エンコーダ13からの駆動側パルスと、走行制御部10aにより算出されたモータ負荷とに基づいて、主駆動用チェーン、第1手摺駆動用チェーン及び第1ローラ駆動用チェーンの弛み量をそれぞれ算出する。弛み量測定部10bは、予め設定された弛み許容値を各チェーンの弛み量が超えたことに応じて、弛み量異常の発生を検出する。
【解決手段】制御盤10は、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dを有している。弛み量測定部10bは、駆動側エンコーダ13からの駆動側パルスと、走行制御部10aにより算出されたモータ負荷とに基づいて、主駆動用チェーン、第1手摺駆動用チェーン及び第1ローラ駆動用チェーンの弛み量をそれぞれ算出する。弛み量測定部10bは、予め設定された弛み許容値を各チェーンの弛み量が超えたことに応じて、弛み量異常の発生を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、モータからの駆動力を手摺駆動軸に伝える手摺駆動用伝達条体の弛み量を測定する乗客コンベアの手摺駆動用伝達条体の弛み量測定装置に関するものである。
【背景技術】
【0002】
従来の乗客コンベアの駆動チェーンの弛み量診断装置では、ステップを走行させるための主駆動軸が、モータ回転軸から主駆動用チェーンを介して駆動力を受ける。そして、駆動チェーンの送り側及び戻り側の一方が緊張し他方が弛緩しているときに、それらの一方が弛緩し他方が緊張するまでモータが駆動され、一方の緊張状態から他方の緊張状態に至るまでのモータの回転軸の回動に応じたパルス数を計数し、その計数値が所定値を超えたことにより、異常検出信号が発せられる(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2003−292280号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ここで、一般的な乗客コンベアでは、保守点検の際に、保守作業員によって手摺駆動用伝達条体(駆動チェーン又は駆動ベルト)の弛み量が確認される。しかしながら、通常、手摺駆動機構(手摺駆動装置)が機械室から離れた位置に配置されているため、手摺駆動用伝達条体の弛み量を確認する際には、ステップ及びスカートガード等を取り外す必要があり、機械室内に収容されたモータ等の点検と別行程の作業(例えば、2人掛かりで30分の作業)を要しており、乗客コンベアの保守点検の作業効率が低下していた。これに加えて、保守作業員がトラス内に進入して手作業で目視により手摺駆動用伝達条体の弛み量を測定しているため、その測定精度にばらつきが生じていた。
【0005】
これに対して、従来の乗客コンベアの駆動チェーンの弛み量診断装置では、主駆動用伝達条体の弛み量を測定可能であるが、手摺駆動用伝達条体の弛み量を測定することはできなかった。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、保守作業員による手摺駆動用伝達条体の弛み量の確認作業を不要とすることができ、乗客コンベアの保守点検の作業効率を向上させることができるとともに、手摺駆動用伝達条体の弛み量の測定精度を向上させることができる乗客コンベアの手摺駆動用伝達条体の弛み量測定装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る乗客コンベアの手摺駆動用伝達条体の弛み量測定装置は、モータの駆動力をステップに伝えるための主駆動軸から、移動手摺を走行させるための手摺駆動軸に駆動力を伝える無端状の手摺駆動用伝達条体の弛み量を測定するためのものであって、モータのモータ回転軸の回動を検出するための駆動側回動検出部、主駆動軸の回動を検出するための主駆動軸側回動検出部、手摺駆動軸の回動を検出するための手摺駆動軸側回動検出部、及び手摺駆動用伝達条体の弛み量を測定するために弛み量測定運転を行う弛み量測定装置本体であって、弛み量測定運転を実行すると、上記モータを駆動させて、上記手摺駆動軸側回動検出部を介して手摺駆動軸が回動したことを検出することにより手摺駆動用伝達条体の送り側及び戻り側の一方が緊張状態となったことを検出し、その後、モータの駆動方向を反転させて、手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するようにモータを駆動させ、主駆動軸側回動検出部を介して主駆動軸が回動したことを検出してから、手摺駆動軸側回動検出部を介して手摺駆動軸が回動したことを検出するまでのモータ回転軸の回動量を駆動側回動検出部を介して測定し、その測定値に基づいて手摺駆動用伝達条体の弛み量を算出する弛み量測定装置本体を備えたものである。
【発明の効果】
【0008】
この発明の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置は、弛み量測定装置本体によって、主駆動軸が回動したことが検出されてから手摺駆動軸が回動したことが検出されるまでのモータ回転軸の回動量に基づいて、手摺駆動用伝達条体の弛み量が算出されるので、保守作業員による手摺駆動用伝達条体の弛み量の確認作業を不要とすることができ、乗客コンベアの保守点検の作業効率を向上させることができるとともに、手摺駆動用伝達条体の弛み量の測定精度を向上させることができる。
【発明を実施するための最良の形態】
【0009】
以下、この発明を実施するための最良の形態について、図面を参照して説明する。
実施の形態1.
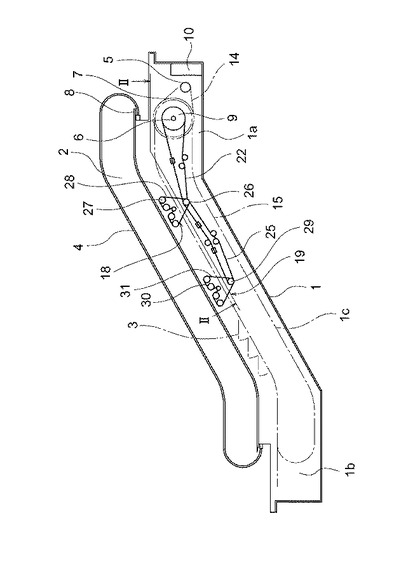
図1は、この発明の実施の形態1によるエスカレータを示す側面図である。図2は、図1のII−II線に沿う断面図である。
図において、建物の上階床と下階床との間には、トラス1が掛け渡されている。トラス1は、上階側水平部1a、下階側水平部1b及び傾斜部1cを有している。上階側水平部1a及び下階側水平部1bには、それぞれ機械室が設けられている。
【0010】
また、トラス1には、一対の欄干2がトラス1の長手方向に沿って立設されている。さらに、トラス1には、複数のステップ(踏段)3が上階側水平部1aと下階側水平部1bとの間を循環移動可能に設けられている。各欄干2には、手摺レール(図示せず)が設けられている。手摺レールには、無端状の移動手摺4が走行可能に設けられている。移動手摺4の走行は、手摺レールによって案内される。
【0011】
上階側水平部1aの機械室には、駆動力発生源であるモータ5、主駆動軸6、主駆動用スプロケット7、上部ステップ駆動用スプロケット8、主手摺駆動用スプロケット9、及び弛み量測定装置本体(チェーンの弛み量を診断する診断装置本体)としての制御盤10が設けられている。下階側水平部1bの機械室には、下部ステップ駆動用スプロケット(図示せず)が設けられている。
【0012】
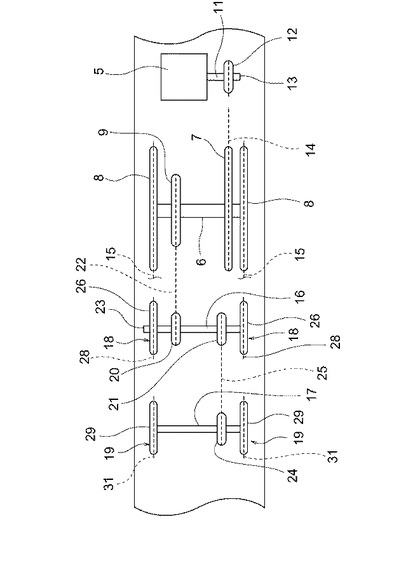
モータ5は、モータ回転軸11を有している。モータ回転軸11には、モータ出力用スプロケット12と、ロータリーエンコーダである駆動側エンコーダ(駆動側回動検出部)13が取り付けられている。駆動側エンコーダ13は、モータ回転軸11の回動に応じた信号を駆動側パルスとして生成する。モータ5の駆動は、制御盤10によって制御される。モータ出力用スプロケット12と主駆動用スプロケット7とには、主駆動用伝達条体としての無端状の主駆動用チェーン14が巻き掛けられている。主駆動用チェーン14によって、モータ回転軸11から主駆動軸6に駆動力が伝えられる。
【0013】
主駆動用スプロケット7、上部ステップ駆動用スプロケット8、主手摺駆動用スプロケット9は、主駆動軸6に取り付けられており、いずれも同期して回転される。上部ステップ駆動用スプロケット8と下部ステップ駆動用スプロケットとには、互いに隣り合うステップ3同士を連結する無端状のステップチェーン15が巻き掛けられている。
【0014】
傾斜部1cには、主駆動軸6に対して平行にトラス1の長手方向に間隔をおいて配置された第1手摺駆動軸16及び第2手摺駆動軸17と、モータ5からの駆動力により移動手摺4を駆動する一対(L側及びR側)の第1手摺駆動機構(手摺駆動装置)18、及び一対の第2手摺駆動機構19とが設けられている。第1手摺駆動軸16の長さ方向中間部には、第1入力用スプロケット20と出力用スプロケット21とが取り付けられている。
【0015】
第1入力用スプロケット20と主手摺駆動用スプロケット9とには、手摺駆動用伝達条体としての無端状の第1手摺駆動用チェーン22が巻き掛けられている。第1手摺駆動用チェーン22によって、モータ5の駆動力が主駆動軸6から第1手摺駆動軸16に伝わる。また、第1手摺駆動軸16には、ロータリーエンコーダである従動側エンコーダ(手摺駆動軸側回動検出部)23が取り付けられている。従動側エンコーダ23は、第1手摺駆動軸16の回動に応じた信号を従動側パルスとして生成する。
【0016】
第2手摺駆動軸17の長さ方向中間部には、第2入力用スプロケット24が取り付けられている。第2入力用スプロケット24と出力用スプロケット21とには、無端状の第2手摺駆動用チェーン25が巻き掛けられている。第2手摺駆動用チェーン25によって、モータ5の駆動力が第1手摺駆動軸16から第2手摺駆動軸17に伝わる。即ち、モータ5からの駆動力は、主手摺駆動用スプロケット9から第1手摺駆動用チェーン22を介して第1手摺駆動軸16に伝わるとともに、第1手摺駆動軸16から第2手摺駆動用チェーン25を介して第2手摺駆動軸17に伝わる。
【0017】
第1手摺駆動機構18は、第1手摺駆動軸16の端部に取り付けられた第1手摺駆動用スプロケット26、複数(4つ)の第1手摺駆動ローラ27、押圧ローラ(図示せず)、及び第1手摺駆動用スプロケット26と各第1手摺駆動ローラ27とを接続する無端状の第1ローラ駆動用チェーン(手摺駆動ローラ用伝達条体)28を有している。第2手摺駆動機構19は、第2手摺駆動軸17の端部に取り付けられた第2手摺駆動用スプロケット29、複数の第2手摺駆動ローラ30、押圧ローラ(図示せず)、及び第2手摺駆動用スプロケット29と各第2手摺駆動ローラ30とを接続する無端状の第2ローラ駆動用チェーン31を有している。第1手摺駆動機構18及び第2手摺駆動機構19は、モータ5の駆動力を受けて、移動手摺4を走行させる。つまり、モータ5の駆動力によって、ステップ3及び移動手摺4が互いに同期して走行される。
【0018】
図3は、図1の制御盤10を具体的に示すブロック図である。制御盤10は、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dを有している。また、制御盤10とモータ5との間には、負荷測定手段及び主駆動軸側回動検出部としての電流検出器32が介在されている。走行制御部10aは、モータ5の駆動を制御し、ステップ3及び移動手摺4の走行を制御する。また、走行制御部10aは、電流検出器32を介して、モータ5に流れる電流を監視し、その電流の値に基づいてモータ5に加わる負荷であるモータ負荷(モータ5の消費電力)を算出する。
【0019】
弛み量測定部10bは、駆動側エンコーダ13からの駆動側パルスと、走行制御部10aにより算出されたモータ負荷とに基づいて、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量をそれぞれ算出する。また、弛み量測定部10bには、ステップ3の駆動に要するモータ負荷であるステップ駆動負荷に対応する値が閾値T1として、移動手摺4の駆動に要するモータ負荷である手摺駆動負荷に対応する値が閾値T2としてそれぞれ予め登録されている。
【0020】
さらに、弛み量測定部10bには、主駆動用チェーン14の弛み量の許容値である弛み許容値α0と、第1手摺駆動用チェーン22の弛み量の許容値である弛み許容値α1と、第1ローラ駆動用チェーン28の弛み量の許容値である弛み許容値α2とがそれぞれ予め登録されている。さらにまた、弛み量測定部10bは、各チェーン14,22,28の弛み量が弛み許容値α0〜α2を超えたことに応じて、弛み量異常(テンション異常)の発生を検出する。
【0021】
弛み量記憶部10cは、弛み量測定部10bにより測定された各チェーン14,22,28の弛み量を記憶する。また、弛み量記憶部10cは、弛み量測定部10bにより弛み量異常が検出されたことを記憶する。さらに、弛み量記憶部10cの記憶内容は、制御盤10に接続された表示器33に表示可能となっている。即ち、弛み量記憶部10cの記憶内容は、保守作業員に告知可能となっている。
【0022】
通信制御部10dは、公衆回線網34を介して、遠隔監視センタ35の管理盤36と通信を行う。また、通信制御部10dは、弛み量測定部10bにより測定された各チェーン14,22,28の弛み量、又は弛み量測定部10bにより弛み量異常が検出されたことを管理盤36に通報する。なお、弛み量測定部10bにより弛み量異常が検出された場合に、弛み量記憶部10cには、どのチェーンに弛み量異常が生じたかが記憶され、表示器33には、弛み量異常が生じたチェーンの種別が表示される。これとともに、通信制御部10dは、弛み量異常が生じたチェーンの種別を管理盤36に通報する。
【0023】
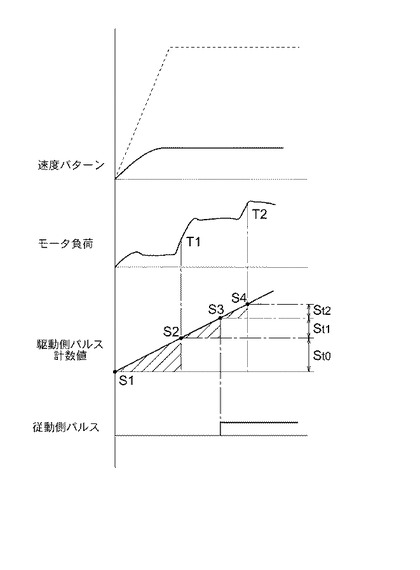
次に、制御盤10による各チェーン14,22,28の測定方法について具体的に説明する。図4は、制御盤10による各チェーン14,22,28の弛み量の測定方法を説明するための説明図である。なお、図4では、横軸を時間軸として、速度パターン、モータ負荷、駆動側パルスの計数値、及び従動側パルスの特性をそれぞれ示す。また、図4では、診断運転時の速度パターンを実線で示し、通常運転時の速度パターンを破線で示す。
【0024】
図4において、制御盤10は、各チェーン14,22,28の弛み量を測定するための診断運転(弛み量側転運転)を実行し、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側(往路及び復路、一側及び他側)の一方を緊張させ他方を弛緩させるように、通常運転時よりも遅い速度パターンでモータ5を駆動させ、モータ負荷が閾値T1に達したことを確認することにより、第1手摺駆動用チェーン22の循環経路の送り側の一方が緊張したと判断し、モータ5の駆動を一旦停止させる。
【0025】
そして、制御盤10は、このときの駆動側パルスの計数値を基準値S1として記憶(パルス計数値をリセットして、パルス計数値0を基準値S1として記憶)し、モータ5の駆動方向を反転させて、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張するように、モータ5を通常運転時よりも遅い速度パターンで駆動させる。このときに、制御盤10は、モータ負荷を監視するとともに駆動側パルスを計数し、モータ負荷が閾値T1に達したことを確認すると、モータ負荷が閾値T1に達したときの駆動側パルスの計数値を計数値S2として記憶する。
【0026】
その後、制御盤10は、従動側パルスが発生したこと、即ち、第1手摺駆動軸16が回動したことを検出すると、第1手摺駆動軸16が回動したときの駆動側パルスの計数値を計数値S3として記憶する。そして、制御盤10は、モータ負荷が閾値T2に達したことを確認すると、モータ負荷が閾値T2に達したときの駆動側パルスの計数値を計数値S4として記憶する。
【0027】
制御盤10は、これらの基準値S1及び計数値S2〜S4を用いて、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量を個別に測定する。より具体的に、制御盤10は、計数値S2と基準値S1との差を算出することにより(基準値S1が0である場合には、計数値S2自体により)、主駆動用チェーン14の弛み量St0を算出して記憶する。また、制御盤10は、計数値S3と計数値S2との差を算出することにより、第1手摺駆動用チェーン22の弛み量St1を算出して記憶する。さらに、制御盤10は、計数値S4と計数値S3との差を算出することにより、第1ローラ駆動用チェーン28の弛み量St2を算出して記憶する。なお、弛み量St2は、一対の(L側及びR側の)第1ローラ駆動用チェーン28の両方の弛み量を一括したものであり、一般的に、運転時間、負荷及び長さ寸法が同一であれば、一対の第1ローラ駆動用チェーン28の弛み量はほぼ同等となる。
【0028】
そして、制御盤10は、弛み許容値α0〜α2と、各弛み量St0〜St2とを比較し、各弛み量St0〜St2が弛み許容値α0〜α2を超えていないかどうかを確認し、各弛み量St0〜St2のいずれかが弛み許容値α0〜α2を超えていれば、弛み量異常が発生したと判断し、弛み量異常が発生したことを記憶するとともに、公衆回線網34を通じて弛み量異常が発生したことを遠隔監視センタ35の管理盤36に通報する。
【0029】
ここで、制御盤10は、演算処理部(CPU)、記憶部(ROM、RAM及びハードディスク等)及び信号入出力部を持ったコンピュータにより構成することができる。制御盤10のコンピュータの記憶部には、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dの機能を実現するためのプログラムが格納されている。
【0030】
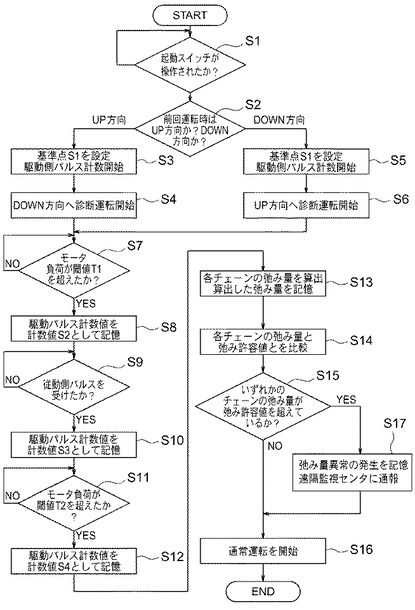
次に、動作について説明する。図5は、制御盤10の動作を示すフローチャートである。なお、図5では、通常運転に先立って診断運転を実行する場合の制御盤10の動作を示す。図5において、制御盤10は、起動スイッチ(図示せず)が操作されると(ステップS1)、前回のエスカレータの運転方向がUP方向であったか、DOWN方向であったかを確認する(ステップS2)。前回のエスカレータの運転方向がUP方向であった場合、制御盤10は、駆動側パルスの計数値の基準値S1を設定して駆動側パルスの計数を開始し(ステップS3)、DOWN方向への診断運転を開始する(ステップS4)。一方、前回のエスカレータの運転方向がDOWN方向であった場合、制御盤10は、駆動側パルスの計数値の基準値S1を設定して駆動側パルスの計数を開始し(ステップS5)、UP方向への診断運転を開始する(ステップS6)。
【0031】
そして、制御盤10は、診断運転を開始すると、モータ5におけるモータ負荷が閾値T1を超えるかどうかを監視し、モータ負荷が閾値T1を超えるまで待機する(ステップS7)。モータ負荷が閾値T1を超えると、制御盤10は、その閾値T1を超えた時点の駆動側パルスの計数値を計数値S2として記憶して(ステップS8)、従動側パルスを受けるかどうかを監視し、従動側パルスを受けるまで待機する(ステップS9)。従動側パルスを受けると、制御盤10は、駆動側パルスの計数値を計数値S3として記憶して(ステップS10)、モータ負荷が閾値T2を超えるかどうかを監視し、モータ負荷が閾値T2を超えるまで待機する(ステップS11)。
【0032】
そして、モータ負荷が閾値T2を超えると、制御盤10は、駆動側パルスの計数値を計数値S4として記憶し(ステップS12)、基準値S1及び計数値S2に基づいて弛み量St0を、計数値S2及び計数値S3に基づいて弛み量St1を、計数値S3及び計数値S4に基づいて弛み量St2をそれぞれ算出し、それらの弛み量St0〜St2を記憶する(ステップS13)。そして、制御盤10は、弛み量St0と弛み許容値α0とを、弛み量St1と弛み許容値α1とを、弛み量St2と弛み許容値α2とそれぞれ比較し(ステップS14)、これらの弛み量St0,St1,St2のうちいずれかの弛み量が弛み許容値α0,α1,α2を超えているかどうかを確認する(ステップS15)。
【0033】
このときに、弛み量St0,St1,St2のいずれも弛み許容値α0,α1,α2を超えてなければ、制御盤10は、そのまま通常運転を開始し(ステップS16)、診断運転の動作が終了となる。一方、弛み量St0,St1,St2のいずれかが弛み許容値α0,α1,α2を超えている場合、制御盤10は、弛み量異常の発生を記憶するとともに遠隔監視センタ35の管理盤36に弛み量異常の発生を通報し(ステップS17)、その後、通常運転を開始し(ステップS16)、診断運転の動作が終了となる。
【0034】
上記のようなエスカレータの手摺駆動用チェーンの弛み量測定装置では、制御盤10によって、主駆動軸6が回動したことが検出されてから第1手摺駆動軸16が回動したことが検出されるまでのモータ回転軸11の回動量に基づいて、第1手摺駆動用チェーン22の弛み量が算出されるので、保守作業員による第1手摺駆動用チェーン22の弛み量の確認作業を不要とすることができ、エスカレータの保守点検の作業効率を向上させることができるとともに、第1手摺駆動用チェーン22の弛み量の測定精度を向上させることができる。
【0035】
また、第1手摺駆動軸16が回動したことを検出してから、モータ負荷が閾値T2を超えたことを検出するまでのモータ回転軸11の回動量に基づいて、第1ローラ駆動用チェーン28の弛み量を算出するので、保守作業員による第1ローラ駆動用チェーン28の弛み量の確認作業を不要とすることができ、エスカレータの保守点検の作業効率をさらに向上させることができる。
【0036】
さらに、各チェーン14,22,28の弛み量が弛み許容値を超えたことに応じて、制御盤10が各チェーン14,22,28の弛み量異常の発生を検出するので、制御盤10が各チェーン14,22,28の弛み量異常の発生を検出するまで、保守作業員による各チェーン14,22,28の弛み量の調節作業を省略することができ、エスカレータの保守点検の作業効率をさらに向上させることができる。
【0037】
さらにまた、測定された各チェーン14,22,28の弛み量を制御盤10が記憶し、その記憶内容が保守作業員に告知可能となっているので、保守作業員が制御盤10(弛み量記憶部10c)の記憶内容を確認することによって、保守作業員が各チェーン14,22,28の弛み量を把握することができ、保守作業の効率を大幅に向上させることができる。
【0038】
また、測定された各チェーン14,22,28の弛み量を制御盤10が、公衆回線網34を通じて遠隔監視センタ35の管理盤36に知らせるので、遠隔保守を容易に行うことができる。これに加えて、各チェーン14,22,28に弛み量異常が生じた場合にも、制御盤10が遠隔監視センタ35の管理盤36に知らせるので、即時的に、作業員をエスカレータの設置現場に派遣して、各チェーン14,22,28の弛み量を適正に調節することが可能となる。
【0039】
さらに、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張する方向へモータ5を駆動させるときに、モータ5の駆動が開始されてからモータ負荷が閾値T1を超えまでのモータ回転軸11の回動量に基づいて、主駆動用チェーン14の弛み量が算出されるので、1回の診断運転で、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量をそれぞれ測定することができ、弛み量の測定効率を向上させることができる。
【0040】
なお、実施の形態1では、エスカレータの手摺駆動用チェーンの弛み量測定装置について説明したが、この発明は、動く歩道の手摺駆動用伝達条体の弛み量測定装置にも適用できる。
【0041】
また、実施の形態1では、図5に示すような動作を通常運転に先立って実行していたが、この例に限るものではなく、保守点検時に、図5に示すような動作を保守作業員による診断開始操作に応じて実行してもよい。この場合、手摺駆動用伝達条体の循環経路の送り側及び戻り側の一方を緊張させ他方を弛緩させるようにモータを駆動させてから、その後、モータの駆動方向を反転させて、手摺駆動用伝達条体の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張する方向へモータを駆動させればよい。
【0042】
さらに、実施の形態1では、各伝達条体にチェーンを用いたが、各伝達条体は、チェーンに限るものではなく、例えばVベルトや平ベルト等を用いてもよい。
【0043】
さらにまた、実施の形態1では、一対の(L側及びR側の)第1ローラ駆動用チェーン28の両方の弛み量を一括して測定したが、この例に限るものではなく、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定してもよい。この場合、一対の(L側及びR側の)移動手摺4の一方のみが走行する際のモータ負荷を閾値T2として予め設定し、一対の移動手摺4の両方が走行する際のモータ負荷を閾値T3として予め設定して(閾値T2<閾値T3)、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定してもよい。より具体的に、一対の第1ローラ駆動用チェーン28の弛み量がほぼ同等の場合には、モータ負荷が閾値T2を超えてから閾値T3を超えるまでの時間差が殆ど生じないが、一対の第1ローラ駆動用チェーン28の一方の弛み量が他方の弛み量よりも大きい場合には、モータ負荷が閾値T2を超えてから閾値T3を超えるまでに時間差が生じる。従って、モータ負荷が閾値T2を超えたことを検出してから閾値T3を超えたことを検出するまでの駆動側パルスの計数値が所定のパルス値を超えたことを検出することにより、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定可能となる。
【0044】
また、実施の形態1では、第1手摺駆動機構18及び第2手摺駆動機構19の2つの手摺駆動機構を用いたが、乗客コンベアの設置環境に応じて第2手摺駆動機構19を省略してもよい。
【0045】
さらに、実施の形態1では、電流検出器32を主駆動軸側回動検出部として用いたが、主駆動軸側回動検出部は電流検出器32に限る物ではなく、例えば、主駆動軸の回動に応じた信号を生成するロータリーエンコーダを主駆動軸側回動検出部として用いてもよい。
【図面の簡単な説明】
【0046】
【図1】この発明の実施の形態1によるエスカレータを示す側面図である。
【図2】図1のII−II線に沿う断面図である。
【図3】図1の制御盤を具体的に示すブロック図である。
【図4】図1の制御盤による各チェーンの弛み量の測定方法を説明するための説明図である。
【図5】図1の制御盤の動作を示すフローチャートである。
【符号の説明】
【0047】
3 ステップ、4 移動手摺、5 モータ、6 主駆動軸、10 制御盤(弛み量測定装置本体)、11 モータ回転軸、13 駆動側エンコーダ(駆動側回動検出部)、14 主駆動用チェーン(主駆動用伝達条体)、16 第1手摺駆動軸、22 第1手摺駆動用チェーン(手摺駆動用伝達条体)、23 従動側エンコーダ(手摺駆動軸側回動検出部)、27 第1手摺駆動ローラ、28 第1ローラ駆動用チェーン(手摺駆動ローラ用伝達条体)、32 電流検出器(主駆動軸側回動検出部、負荷測定手段)、34 公衆回線網、35 遠隔監視センタ、36 管理盤。
【技術分野】
【0001】
この発明は、モータからの駆動力を手摺駆動軸に伝える手摺駆動用伝達条体の弛み量を測定する乗客コンベアの手摺駆動用伝達条体の弛み量測定装置に関するものである。
【背景技術】
【0002】
従来の乗客コンベアの駆動チェーンの弛み量診断装置では、ステップを走行させるための主駆動軸が、モータ回転軸から主駆動用チェーンを介して駆動力を受ける。そして、駆動チェーンの送り側及び戻り側の一方が緊張し他方が弛緩しているときに、それらの一方が弛緩し他方が緊張するまでモータが駆動され、一方の緊張状態から他方の緊張状態に至るまでのモータの回転軸の回動に応じたパルス数を計数し、その計数値が所定値を超えたことにより、異常検出信号が発せられる(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2003−292280号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ここで、一般的な乗客コンベアでは、保守点検の際に、保守作業員によって手摺駆動用伝達条体(駆動チェーン又は駆動ベルト)の弛み量が確認される。しかしながら、通常、手摺駆動機構(手摺駆動装置)が機械室から離れた位置に配置されているため、手摺駆動用伝達条体の弛み量を確認する際には、ステップ及びスカートガード等を取り外す必要があり、機械室内に収容されたモータ等の点検と別行程の作業(例えば、2人掛かりで30分の作業)を要しており、乗客コンベアの保守点検の作業効率が低下していた。これに加えて、保守作業員がトラス内に進入して手作業で目視により手摺駆動用伝達条体の弛み量を測定しているため、その測定精度にばらつきが生じていた。
【0005】
これに対して、従来の乗客コンベアの駆動チェーンの弛み量診断装置では、主駆動用伝達条体の弛み量を測定可能であるが、手摺駆動用伝達条体の弛み量を測定することはできなかった。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、保守作業員による手摺駆動用伝達条体の弛み量の確認作業を不要とすることができ、乗客コンベアの保守点検の作業効率を向上させることができるとともに、手摺駆動用伝達条体の弛み量の測定精度を向上させることができる乗客コンベアの手摺駆動用伝達条体の弛み量測定装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る乗客コンベアの手摺駆動用伝達条体の弛み量測定装置は、モータの駆動力をステップに伝えるための主駆動軸から、移動手摺を走行させるための手摺駆動軸に駆動力を伝える無端状の手摺駆動用伝達条体の弛み量を測定するためのものであって、モータのモータ回転軸の回動を検出するための駆動側回動検出部、主駆動軸の回動を検出するための主駆動軸側回動検出部、手摺駆動軸の回動を検出するための手摺駆動軸側回動検出部、及び手摺駆動用伝達条体の弛み量を測定するために弛み量測定運転を行う弛み量測定装置本体であって、弛み量測定運転を実行すると、上記モータを駆動させて、上記手摺駆動軸側回動検出部を介して手摺駆動軸が回動したことを検出することにより手摺駆動用伝達条体の送り側及び戻り側の一方が緊張状態となったことを検出し、その後、モータの駆動方向を反転させて、手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するようにモータを駆動させ、主駆動軸側回動検出部を介して主駆動軸が回動したことを検出してから、手摺駆動軸側回動検出部を介して手摺駆動軸が回動したことを検出するまでのモータ回転軸の回動量を駆動側回動検出部を介して測定し、その測定値に基づいて手摺駆動用伝達条体の弛み量を算出する弛み量測定装置本体を備えたものである。
【発明の効果】
【0008】
この発明の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置は、弛み量測定装置本体によって、主駆動軸が回動したことが検出されてから手摺駆動軸が回動したことが検出されるまでのモータ回転軸の回動量に基づいて、手摺駆動用伝達条体の弛み量が算出されるので、保守作業員による手摺駆動用伝達条体の弛み量の確認作業を不要とすることができ、乗客コンベアの保守点検の作業効率を向上させることができるとともに、手摺駆動用伝達条体の弛み量の測定精度を向上させることができる。
【発明を実施するための最良の形態】
【0009】
以下、この発明を実施するための最良の形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1によるエスカレータを示す側面図である。図2は、図1のII−II線に沿う断面図である。
図において、建物の上階床と下階床との間には、トラス1が掛け渡されている。トラス1は、上階側水平部1a、下階側水平部1b及び傾斜部1cを有している。上階側水平部1a及び下階側水平部1bには、それぞれ機械室が設けられている。
【0010】
また、トラス1には、一対の欄干2がトラス1の長手方向に沿って立設されている。さらに、トラス1には、複数のステップ(踏段)3が上階側水平部1aと下階側水平部1bとの間を循環移動可能に設けられている。各欄干2には、手摺レール(図示せず)が設けられている。手摺レールには、無端状の移動手摺4が走行可能に設けられている。移動手摺4の走行は、手摺レールによって案内される。
【0011】
上階側水平部1aの機械室には、駆動力発生源であるモータ5、主駆動軸6、主駆動用スプロケット7、上部ステップ駆動用スプロケット8、主手摺駆動用スプロケット9、及び弛み量測定装置本体(チェーンの弛み量を診断する診断装置本体)としての制御盤10が設けられている。下階側水平部1bの機械室には、下部ステップ駆動用スプロケット(図示せず)が設けられている。
【0012】
モータ5は、モータ回転軸11を有している。モータ回転軸11には、モータ出力用スプロケット12と、ロータリーエンコーダである駆動側エンコーダ(駆動側回動検出部)13が取り付けられている。駆動側エンコーダ13は、モータ回転軸11の回動に応じた信号を駆動側パルスとして生成する。モータ5の駆動は、制御盤10によって制御される。モータ出力用スプロケット12と主駆動用スプロケット7とには、主駆動用伝達条体としての無端状の主駆動用チェーン14が巻き掛けられている。主駆動用チェーン14によって、モータ回転軸11から主駆動軸6に駆動力が伝えられる。
【0013】
主駆動用スプロケット7、上部ステップ駆動用スプロケット8、主手摺駆動用スプロケット9は、主駆動軸6に取り付けられており、いずれも同期して回転される。上部ステップ駆動用スプロケット8と下部ステップ駆動用スプロケットとには、互いに隣り合うステップ3同士を連結する無端状のステップチェーン15が巻き掛けられている。
【0014】
傾斜部1cには、主駆動軸6に対して平行にトラス1の長手方向に間隔をおいて配置された第1手摺駆動軸16及び第2手摺駆動軸17と、モータ5からの駆動力により移動手摺4を駆動する一対(L側及びR側)の第1手摺駆動機構(手摺駆動装置)18、及び一対の第2手摺駆動機構19とが設けられている。第1手摺駆動軸16の長さ方向中間部には、第1入力用スプロケット20と出力用スプロケット21とが取り付けられている。
【0015】
第1入力用スプロケット20と主手摺駆動用スプロケット9とには、手摺駆動用伝達条体としての無端状の第1手摺駆動用チェーン22が巻き掛けられている。第1手摺駆動用チェーン22によって、モータ5の駆動力が主駆動軸6から第1手摺駆動軸16に伝わる。また、第1手摺駆動軸16には、ロータリーエンコーダである従動側エンコーダ(手摺駆動軸側回動検出部)23が取り付けられている。従動側エンコーダ23は、第1手摺駆動軸16の回動に応じた信号を従動側パルスとして生成する。
【0016】
第2手摺駆動軸17の長さ方向中間部には、第2入力用スプロケット24が取り付けられている。第2入力用スプロケット24と出力用スプロケット21とには、無端状の第2手摺駆動用チェーン25が巻き掛けられている。第2手摺駆動用チェーン25によって、モータ5の駆動力が第1手摺駆動軸16から第2手摺駆動軸17に伝わる。即ち、モータ5からの駆動力は、主手摺駆動用スプロケット9から第1手摺駆動用チェーン22を介して第1手摺駆動軸16に伝わるとともに、第1手摺駆動軸16から第2手摺駆動用チェーン25を介して第2手摺駆動軸17に伝わる。
【0017】
第1手摺駆動機構18は、第1手摺駆動軸16の端部に取り付けられた第1手摺駆動用スプロケット26、複数(4つ)の第1手摺駆動ローラ27、押圧ローラ(図示せず)、及び第1手摺駆動用スプロケット26と各第1手摺駆動ローラ27とを接続する無端状の第1ローラ駆動用チェーン(手摺駆動ローラ用伝達条体)28を有している。第2手摺駆動機構19は、第2手摺駆動軸17の端部に取り付けられた第2手摺駆動用スプロケット29、複数の第2手摺駆動ローラ30、押圧ローラ(図示せず)、及び第2手摺駆動用スプロケット29と各第2手摺駆動ローラ30とを接続する無端状の第2ローラ駆動用チェーン31を有している。第1手摺駆動機構18及び第2手摺駆動機構19は、モータ5の駆動力を受けて、移動手摺4を走行させる。つまり、モータ5の駆動力によって、ステップ3及び移動手摺4が互いに同期して走行される。
【0018】
図3は、図1の制御盤10を具体的に示すブロック図である。制御盤10は、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dを有している。また、制御盤10とモータ5との間には、負荷測定手段及び主駆動軸側回動検出部としての電流検出器32が介在されている。走行制御部10aは、モータ5の駆動を制御し、ステップ3及び移動手摺4の走行を制御する。また、走行制御部10aは、電流検出器32を介して、モータ5に流れる電流を監視し、その電流の値に基づいてモータ5に加わる負荷であるモータ負荷(モータ5の消費電力)を算出する。
【0019】
弛み量測定部10bは、駆動側エンコーダ13からの駆動側パルスと、走行制御部10aにより算出されたモータ負荷とに基づいて、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量をそれぞれ算出する。また、弛み量測定部10bには、ステップ3の駆動に要するモータ負荷であるステップ駆動負荷に対応する値が閾値T1として、移動手摺4の駆動に要するモータ負荷である手摺駆動負荷に対応する値が閾値T2としてそれぞれ予め登録されている。
【0020】
さらに、弛み量測定部10bには、主駆動用チェーン14の弛み量の許容値である弛み許容値α0と、第1手摺駆動用チェーン22の弛み量の許容値である弛み許容値α1と、第1ローラ駆動用チェーン28の弛み量の許容値である弛み許容値α2とがそれぞれ予め登録されている。さらにまた、弛み量測定部10bは、各チェーン14,22,28の弛み量が弛み許容値α0〜α2を超えたことに応じて、弛み量異常(テンション異常)の発生を検出する。
【0021】
弛み量記憶部10cは、弛み量測定部10bにより測定された各チェーン14,22,28の弛み量を記憶する。また、弛み量記憶部10cは、弛み量測定部10bにより弛み量異常が検出されたことを記憶する。さらに、弛み量記憶部10cの記憶内容は、制御盤10に接続された表示器33に表示可能となっている。即ち、弛み量記憶部10cの記憶内容は、保守作業員に告知可能となっている。
【0022】
通信制御部10dは、公衆回線網34を介して、遠隔監視センタ35の管理盤36と通信を行う。また、通信制御部10dは、弛み量測定部10bにより測定された各チェーン14,22,28の弛み量、又は弛み量測定部10bにより弛み量異常が検出されたことを管理盤36に通報する。なお、弛み量測定部10bにより弛み量異常が検出された場合に、弛み量記憶部10cには、どのチェーンに弛み量異常が生じたかが記憶され、表示器33には、弛み量異常が生じたチェーンの種別が表示される。これとともに、通信制御部10dは、弛み量異常が生じたチェーンの種別を管理盤36に通報する。
【0023】
次に、制御盤10による各チェーン14,22,28の測定方法について具体的に説明する。図4は、制御盤10による各チェーン14,22,28の弛み量の測定方法を説明するための説明図である。なお、図4では、横軸を時間軸として、速度パターン、モータ負荷、駆動側パルスの計数値、及び従動側パルスの特性をそれぞれ示す。また、図4では、診断運転時の速度パターンを実線で示し、通常運転時の速度パターンを破線で示す。
【0024】
図4において、制御盤10は、各チェーン14,22,28の弛み量を測定するための診断運転(弛み量側転運転)を実行し、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側(往路及び復路、一側及び他側)の一方を緊張させ他方を弛緩させるように、通常運転時よりも遅い速度パターンでモータ5を駆動させ、モータ負荷が閾値T1に達したことを確認することにより、第1手摺駆動用チェーン22の循環経路の送り側の一方が緊張したと判断し、モータ5の駆動を一旦停止させる。
【0025】
そして、制御盤10は、このときの駆動側パルスの計数値を基準値S1として記憶(パルス計数値をリセットして、パルス計数値0を基準値S1として記憶)し、モータ5の駆動方向を反転させて、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張するように、モータ5を通常運転時よりも遅い速度パターンで駆動させる。このときに、制御盤10は、モータ負荷を監視するとともに駆動側パルスを計数し、モータ負荷が閾値T1に達したことを確認すると、モータ負荷が閾値T1に達したときの駆動側パルスの計数値を計数値S2として記憶する。
【0026】
その後、制御盤10は、従動側パルスが発生したこと、即ち、第1手摺駆動軸16が回動したことを検出すると、第1手摺駆動軸16が回動したときの駆動側パルスの計数値を計数値S3として記憶する。そして、制御盤10は、モータ負荷が閾値T2に達したことを確認すると、モータ負荷が閾値T2に達したときの駆動側パルスの計数値を計数値S4として記憶する。
【0027】
制御盤10は、これらの基準値S1及び計数値S2〜S4を用いて、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量を個別に測定する。より具体的に、制御盤10は、計数値S2と基準値S1との差を算出することにより(基準値S1が0である場合には、計数値S2自体により)、主駆動用チェーン14の弛み量St0を算出して記憶する。また、制御盤10は、計数値S3と計数値S2との差を算出することにより、第1手摺駆動用チェーン22の弛み量St1を算出して記憶する。さらに、制御盤10は、計数値S4と計数値S3との差を算出することにより、第1ローラ駆動用チェーン28の弛み量St2を算出して記憶する。なお、弛み量St2は、一対の(L側及びR側の)第1ローラ駆動用チェーン28の両方の弛み量を一括したものであり、一般的に、運転時間、負荷及び長さ寸法が同一であれば、一対の第1ローラ駆動用チェーン28の弛み量はほぼ同等となる。
【0028】
そして、制御盤10は、弛み許容値α0〜α2と、各弛み量St0〜St2とを比較し、各弛み量St0〜St2が弛み許容値α0〜α2を超えていないかどうかを確認し、各弛み量St0〜St2のいずれかが弛み許容値α0〜α2を超えていれば、弛み量異常が発生したと判断し、弛み量異常が発生したことを記憶するとともに、公衆回線網34を通じて弛み量異常が発生したことを遠隔監視センタ35の管理盤36に通報する。
【0029】
ここで、制御盤10は、演算処理部(CPU)、記憶部(ROM、RAM及びハードディスク等)及び信号入出力部を持ったコンピュータにより構成することができる。制御盤10のコンピュータの記憶部には、走行制御部10a、弛み量測定部10b、弛み量記憶部10c及び通信制御部10dの機能を実現するためのプログラムが格納されている。
【0030】
次に、動作について説明する。図5は、制御盤10の動作を示すフローチャートである。なお、図5では、通常運転に先立って診断運転を実行する場合の制御盤10の動作を示す。図5において、制御盤10は、起動スイッチ(図示せず)が操作されると(ステップS1)、前回のエスカレータの運転方向がUP方向であったか、DOWN方向であったかを確認する(ステップS2)。前回のエスカレータの運転方向がUP方向であった場合、制御盤10は、駆動側パルスの計数値の基準値S1を設定して駆動側パルスの計数を開始し(ステップS3)、DOWN方向への診断運転を開始する(ステップS4)。一方、前回のエスカレータの運転方向がDOWN方向であった場合、制御盤10は、駆動側パルスの計数値の基準値S1を設定して駆動側パルスの計数を開始し(ステップS5)、UP方向への診断運転を開始する(ステップS6)。
【0031】
そして、制御盤10は、診断運転を開始すると、モータ5におけるモータ負荷が閾値T1を超えるかどうかを監視し、モータ負荷が閾値T1を超えるまで待機する(ステップS7)。モータ負荷が閾値T1を超えると、制御盤10は、その閾値T1を超えた時点の駆動側パルスの計数値を計数値S2として記憶して(ステップS8)、従動側パルスを受けるかどうかを監視し、従動側パルスを受けるまで待機する(ステップS9)。従動側パルスを受けると、制御盤10は、駆動側パルスの計数値を計数値S3として記憶して(ステップS10)、モータ負荷が閾値T2を超えるかどうかを監視し、モータ負荷が閾値T2を超えるまで待機する(ステップS11)。
【0032】
そして、モータ負荷が閾値T2を超えると、制御盤10は、駆動側パルスの計数値を計数値S4として記憶し(ステップS12)、基準値S1及び計数値S2に基づいて弛み量St0を、計数値S2及び計数値S3に基づいて弛み量St1を、計数値S3及び計数値S4に基づいて弛み量St2をそれぞれ算出し、それらの弛み量St0〜St2を記憶する(ステップS13)。そして、制御盤10は、弛み量St0と弛み許容値α0とを、弛み量St1と弛み許容値α1とを、弛み量St2と弛み許容値α2とそれぞれ比較し(ステップS14)、これらの弛み量St0,St1,St2のうちいずれかの弛み量が弛み許容値α0,α1,α2を超えているかどうかを確認する(ステップS15)。
【0033】
このときに、弛み量St0,St1,St2のいずれも弛み許容値α0,α1,α2を超えてなければ、制御盤10は、そのまま通常運転を開始し(ステップS16)、診断運転の動作が終了となる。一方、弛み量St0,St1,St2のいずれかが弛み許容値α0,α1,α2を超えている場合、制御盤10は、弛み量異常の発生を記憶するとともに遠隔監視センタ35の管理盤36に弛み量異常の発生を通報し(ステップS17)、その後、通常運転を開始し(ステップS16)、診断運転の動作が終了となる。
【0034】
上記のようなエスカレータの手摺駆動用チェーンの弛み量測定装置では、制御盤10によって、主駆動軸6が回動したことが検出されてから第1手摺駆動軸16が回動したことが検出されるまでのモータ回転軸11の回動量に基づいて、第1手摺駆動用チェーン22の弛み量が算出されるので、保守作業員による第1手摺駆動用チェーン22の弛み量の確認作業を不要とすることができ、エスカレータの保守点検の作業効率を向上させることができるとともに、第1手摺駆動用チェーン22の弛み量の測定精度を向上させることができる。
【0035】
また、第1手摺駆動軸16が回動したことを検出してから、モータ負荷が閾値T2を超えたことを検出するまでのモータ回転軸11の回動量に基づいて、第1ローラ駆動用チェーン28の弛み量を算出するので、保守作業員による第1ローラ駆動用チェーン28の弛み量の確認作業を不要とすることができ、エスカレータの保守点検の作業効率をさらに向上させることができる。
【0036】
さらに、各チェーン14,22,28の弛み量が弛み許容値を超えたことに応じて、制御盤10が各チェーン14,22,28の弛み量異常の発生を検出するので、制御盤10が各チェーン14,22,28の弛み量異常の発生を検出するまで、保守作業員による各チェーン14,22,28の弛み量の調節作業を省略することができ、エスカレータの保守点検の作業効率をさらに向上させることができる。
【0037】
さらにまた、測定された各チェーン14,22,28の弛み量を制御盤10が記憶し、その記憶内容が保守作業員に告知可能となっているので、保守作業員が制御盤10(弛み量記憶部10c)の記憶内容を確認することによって、保守作業員が各チェーン14,22,28の弛み量を把握することができ、保守作業の効率を大幅に向上させることができる。
【0038】
また、測定された各チェーン14,22,28の弛み量を制御盤10が、公衆回線網34を通じて遠隔監視センタ35の管理盤36に知らせるので、遠隔保守を容易に行うことができる。これに加えて、各チェーン14,22,28に弛み量異常が生じた場合にも、制御盤10が遠隔監視センタ35の管理盤36に知らせるので、即時的に、作業員をエスカレータの設置現場に派遣して、各チェーン14,22,28の弛み量を適正に調節することが可能となる。
【0039】
さらに、第1手摺駆動用チェーン22の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張する方向へモータ5を駆動させるときに、モータ5の駆動が開始されてからモータ負荷が閾値T1を超えまでのモータ回転軸11の回動量に基づいて、主駆動用チェーン14の弛み量が算出されるので、1回の診断運転で、主駆動用チェーン14、第1手摺駆動用チェーン22及び第1ローラ駆動用チェーン28の弛み量をそれぞれ測定することができ、弛み量の測定効率を向上させることができる。
【0040】
なお、実施の形態1では、エスカレータの手摺駆動用チェーンの弛み量測定装置について説明したが、この発明は、動く歩道の手摺駆動用伝達条体の弛み量測定装置にも適用できる。
【0041】
また、実施の形態1では、図5に示すような動作を通常運転に先立って実行していたが、この例に限るものではなく、保守点検時に、図5に示すような動作を保守作業員による診断開始操作に応じて実行してもよい。この場合、手摺駆動用伝達条体の循環経路の送り側及び戻り側の一方を緊張させ他方を弛緩させるようにモータを駆動させてから、その後、モータの駆動方向を反転させて、手摺駆動用伝達条体の循環経路の送り側及び戻り側の一方が弛緩し他方が緊張する方向へモータを駆動させればよい。
【0042】
さらに、実施の形態1では、各伝達条体にチェーンを用いたが、各伝達条体は、チェーンに限るものではなく、例えばVベルトや平ベルト等を用いてもよい。
【0043】
さらにまた、実施の形態1では、一対の(L側及びR側の)第1ローラ駆動用チェーン28の両方の弛み量を一括して測定したが、この例に限るものではなく、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定してもよい。この場合、一対の(L側及びR側の)移動手摺4の一方のみが走行する際のモータ負荷を閾値T2として予め設定し、一対の移動手摺4の両方が走行する際のモータ負荷を閾値T3として予め設定して(閾値T2<閾値T3)、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定してもよい。より具体的に、一対の第1ローラ駆動用チェーン28の弛み量がほぼ同等の場合には、モータ負荷が閾値T2を超えてから閾値T3を超えるまでの時間差が殆ど生じないが、一対の第1ローラ駆動用チェーン28の一方の弛み量が他方の弛み量よりも大きい場合には、モータ負荷が閾値T2を超えてから閾値T3を超えるまでに時間差が生じる。従って、モータ負荷が閾値T2を超えたことを検出してから閾値T3を超えたことを検出するまでの駆動側パルスの計数値が所定のパルス値を超えたことを検出することにより、一対の第1ローラ駆動用チェーン28の弛み量を個別に測定可能となる。
【0044】
また、実施の形態1では、第1手摺駆動機構18及び第2手摺駆動機構19の2つの手摺駆動機構を用いたが、乗客コンベアの設置環境に応じて第2手摺駆動機構19を省略してもよい。
【0045】
さらに、実施の形態1では、電流検出器32を主駆動軸側回動検出部として用いたが、主駆動軸側回動検出部は電流検出器32に限る物ではなく、例えば、主駆動軸の回動に応じた信号を生成するロータリーエンコーダを主駆動軸側回動検出部として用いてもよい。
【図面の簡単な説明】
【0046】
【図1】この発明の実施の形態1によるエスカレータを示す側面図である。
【図2】図1のII−II線に沿う断面図である。
【図3】図1の制御盤を具体的に示すブロック図である。
【図4】図1の制御盤による各チェーンの弛み量の測定方法を説明するための説明図である。
【図5】図1の制御盤の動作を示すフローチャートである。
【符号の説明】
【0047】
3 ステップ、4 移動手摺、5 モータ、6 主駆動軸、10 制御盤(弛み量測定装置本体)、11 モータ回転軸、13 駆動側エンコーダ(駆動側回動検出部)、14 主駆動用チェーン(主駆動用伝達条体)、16 第1手摺駆動軸、22 第1手摺駆動用チェーン(手摺駆動用伝達条体)、23 従動側エンコーダ(手摺駆動軸側回動検出部)、27 第1手摺駆動ローラ、28 第1ローラ駆動用チェーン(手摺駆動ローラ用伝達条体)、32 電流検出器(主駆動軸側回動検出部、負荷測定手段)、34 公衆回線網、35 遠隔監視センタ、36 管理盤。
【特許請求の範囲】
【請求項1】
モータの駆動力をステップに伝えるための主駆動軸から、移動手摺を走行させるための手摺駆動軸に駆動力を伝える無端状の手摺駆動用伝達条体の弛み量を測定するための乗客コンベアの手摺駆動用伝達条体の弛み量測定装置であって、
上記モータのモータ回転軸の回動を検出するための駆動側回動検出部、
上記主駆動軸の回動を検出するための主駆動軸側回動検出部、
上記手摺駆動軸の回動を検出するための手摺駆動軸側回動検出部、及び
上記手摺駆動用伝達条体の弛み量を測定するために弛み量測定運転を行う弛み量測定装置本体であって、上記弛み量測定運転を実行すると、上記モータを駆動させて、上記手摺駆動軸側回動検出部を介して上記手摺駆動軸が回動したことを検出することにより上記手摺駆動用伝達条体の送り側及び戻り側の一方が緊張状態となったことを検出し、その後、上記モータの駆動方向を反転させて、上記手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するように上記モータを駆動させ、上記主駆動軸側回動検出部を介して上記主駆動軸が回動したことを検出してから、上記手摺駆動軸側回動検出部を介して上記手摺駆動軸が回動したことを検出するまでの上記モータ回転軸の回動量を上記駆動側回動検出部を介して測定し、その測定値に基づいて上記手摺駆動用伝達条体の弛み量を算出する弛み量測定装置本体
を備えていることを特徴とする乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項2】
上記主駆動軸側回動検出部は、上記モータに接続され上記モータに掛かる負荷であるモータ負荷を測定するためのモータ負荷測定手段であり、
上記弛み量測定装置本体には、上記ステップを駆動させるために要するモータ負荷がステップ駆動負荷として予め登録されており、
上記弛み量測定装置本体は、上記モータ負荷測定手段を介して測定したモータ負荷が上記ステップ駆動負荷を超えたことを検出することにより、上記主駆動軸の回動を検出することを特徴とする請求項1記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項3】
上記弛み量測定装置本体には、上記移動手摺を駆動させるために要するモータ負荷が手摺駆動負荷として予め登録されており、
上記弛み量測定装置本体は、上記手摺駆動軸が回動したことを検出してから、上記手摺駆動負荷をモータ負荷が超えたことを検出するまでの上記モータ回転軸の回動量を測定し、その測定値に基づいて、上記手摺駆動軸から上記移動手摺に駆動力を加える複数の手摺駆動ローラに駆動力を伝える無端状の手摺駆動ローラ用伝達条体の弛み量を算出することを特徴とする請求項2記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項4】
上記弛み量測定装置本体は、上記各伝達条体に対応付けて予め登録された弛み許容値と、算出された上記各伝達条体の弛み量とをそれぞれ比較し、上記各伝達条体の弛み量が弛み許容値を超えた場合に、弛み量異常の発生を検出することを特徴とする請求項3記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項5】
上記弛み量測定装置本体は、上記手摺駆動用伝達条体及び上記手摺駆動ローラ用伝達条体の弛み量を算出すると、それらの弛み量をそれぞれ記憶し、
上記弛み量測定装置本体に記憶された上記各伝達条体の弛み量は、保守作業員に告知可能となっていることを特徴とする請求項3又は請求項4に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項6】
上記弛み量測定装置本体は、上記手摺駆動用伝達条体及び上記手摺駆動ローラ用伝達条体の弛み量を算出すると、その弛み量を、公衆回線網を通じて遠隔監視センタの管理盤に知らせることを特徴とする請求項3から請求項5までのいずれか1項に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項7】
上記弛み量測定装置本体は、上記弛み量測定運転を実行し上記手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するように上記モータを駆動させているときに、上記モータの駆動が開始されてから上記主駆動軸の回動を検出するまでの上記モータ回転軸の回動量を測定し、その測定値に基づいて、上記モータ回転軸から上記主駆動軸に駆動力を伝える主駆動用伝達条体の弛み量を算出することを特徴とする請求項1から請求項6までのいずれか1項に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項1】
モータの駆動力をステップに伝えるための主駆動軸から、移動手摺を走行させるための手摺駆動軸に駆動力を伝える無端状の手摺駆動用伝達条体の弛み量を測定するための乗客コンベアの手摺駆動用伝達条体の弛み量測定装置であって、
上記モータのモータ回転軸の回動を検出するための駆動側回動検出部、
上記主駆動軸の回動を検出するための主駆動軸側回動検出部、
上記手摺駆動軸の回動を検出するための手摺駆動軸側回動検出部、及び
上記手摺駆動用伝達条体の弛み量を測定するために弛み量測定運転を行う弛み量測定装置本体であって、上記弛み量測定運転を実行すると、上記モータを駆動させて、上記手摺駆動軸側回動検出部を介して上記手摺駆動軸が回動したことを検出することにより上記手摺駆動用伝達条体の送り側及び戻り側の一方が緊張状態となったことを検出し、その後、上記モータの駆動方向を反転させて、上記手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するように上記モータを駆動させ、上記主駆動軸側回動検出部を介して上記主駆動軸が回動したことを検出してから、上記手摺駆動軸側回動検出部を介して上記手摺駆動軸が回動したことを検出するまでの上記モータ回転軸の回動量を上記駆動側回動検出部を介して測定し、その測定値に基づいて上記手摺駆動用伝達条体の弛み量を算出する弛み量測定装置本体
を備えていることを特徴とする乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項2】
上記主駆動軸側回動検出部は、上記モータに接続され上記モータに掛かる負荷であるモータ負荷を測定するためのモータ負荷測定手段であり、
上記弛み量測定装置本体には、上記ステップを駆動させるために要するモータ負荷がステップ駆動負荷として予め登録されており、
上記弛み量測定装置本体は、上記モータ負荷測定手段を介して測定したモータ負荷が上記ステップ駆動負荷を超えたことを検出することにより、上記主駆動軸の回動を検出することを特徴とする請求項1記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項3】
上記弛み量測定装置本体には、上記移動手摺を駆動させるために要するモータ負荷が手摺駆動負荷として予め登録されており、
上記弛み量測定装置本体は、上記手摺駆動軸が回動したことを検出してから、上記手摺駆動負荷をモータ負荷が超えたことを検出するまでの上記モータ回転軸の回動量を測定し、その測定値に基づいて、上記手摺駆動軸から上記移動手摺に駆動力を加える複数の手摺駆動ローラに駆動力を伝える無端状の手摺駆動ローラ用伝達条体の弛み量を算出することを特徴とする請求項2記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項4】
上記弛み量測定装置本体は、上記各伝達条体に対応付けて予め登録された弛み許容値と、算出された上記各伝達条体の弛み量とをそれぞれ比較し、上記各伝達条体の弛み量が弛み許容値を超えた場合に、弛み量異常の発生を検出することを特徴とする請求項3記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項5】
上記弛み量測定装置本体は、上記手摺駆動用伝達条体及び上記手摺駆動ローラ用伝達条体の弛み量を算出すると、それらの弛み量をそれぞれ記憶し、
上記弛み量測定装置本体に記憶された上記各伝達条体の弛み量は、保守作業員に告知可能となっていることを特徴とする請求項3又は請求項4に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項6】
上記弛み量測定装置本体は、上記手摺駆動用伝達条体及び上記手摺駆動ローラ用伝達条体の弛み量を算出すると、その弛み量を、公衆回線網を通じて遠隔監視センタの管理盤に知らせることを特徴とする請求項3から請求項5までのいずれか1項に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【請求項7】
上記弛み量測定装置本体は、上記弛み量測定運転を実行し上記手摺駆動用伝達条体の送り側及び戻り側の他方が緊張するように上記モータを駆動させているときに、上記モータの駆動が開始されてから上記主駆動軸の回動を検出するまでの上記モータ回転軸の回動量を測定し、その測定値に基づいて、上記モータ回転軸から上記主駆動軸に駆動力を伝える主駆動用伝達条体の弛み量を算出することを特徴とする請求項1から請求項6までのいずれか1項に記載の乗客コンベアの手摺駆動用伝達条体の弛み量測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−83941(P2009−83941A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−251606(P2007−251606)
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月27日(2007.9.27)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]