
乗客コンベアの踏段鎖破断検出装置
【課題】常開式のa接点と常閉式のb接点とを有するリミットスイッチを用い、乗客コンベアの安全機構に組み込むことができると共に、安全機構の作動前に踏段鎖の異常伸びの発生を報知できる乗客コンベアの踏段鎖破断検出装置を提供する。
【解決手段】常開式のa接点と常閉式のb接点とを有するリミットスイッチ30、踏段鎖の伸びに連動して移動するスイッチカム26、及びa接点の出力を入力し、踏段鎖の異常伸び発生を報知する報知手段を有する。スイッチカム26が第1距離移動すると、リミットスイッチ30のa接点が閉成し、報知手段が踏段鎖の異常伸び発生を報知する。リミットスイッチ30のb接点が駆動機への通電経路の接続に接続され、スイッチカム26が第1距離より長い第2距離移動すると、b接点が開成し、踏段鎖の循環移動を停止する。
【解決手段】常開式のa接点と常閉式のb接点とを有するリミットスイッチ30、踏段鎖の伸びに連動して移動するスイッチカム26、及びa接点の出力を入力し、踏段鎖の異常伸び発生を報知する報知手段を有する。スイッチカム26が第1距離移動すると、リミットスイッチ30のa接点が閉成し、報知手段が踏段鎖の異常伸び発生を報知する。リミットスイッチ30のb接点が駆動機への通電経路の接続に接続され、スイッチカム26が第1距離より長い第2距離移動すると、b接点が開成し、踏段鎖の循環移動を停止する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エスカレータや動く歩道などの乗客コンベアの踏段鎖破断検出装置に関するものである。
【背景技術】
【0002】
従来の乗客コンベアの運転管理装置では、多数の踏段を無端状に連結してなる踏段鎖がトラスの上端側および下端側に設けられた上鎖車および下鎖車に巻き掛けられ、一端を下鎖車に連結された引っ張り軸がその他端をトラスに固定されたブラケットに挿通され、圧縮コイルバネが引っ張り軸の他端に螺着された調整ナットとブラケットとの間に縮設され、踏段鎖に所定の張力を付与している。第1作動片が引っ張り軸の挿通端の調整ナット側に配置され、第2作動片が引っ張り軸の挿通端の先端寄りに配置されている。さらに、マイクロスイッチの作動部が第1作動片と第2作動片との間に配設されている(例えば、特許文献1参照)。
【0003】
この従来の乗客コンベアの運転管理装置においては、上鎖車がトラスの上端側に設けられた駆動機により駆動され、踏段鎖が循環移動される。そして、踏段鎖に異常な伸びが発生したり、踏段鎖が破断した場合には、下鎖車が圧縮コイルバネの付勢力により、トラス下端側に異常変位する。これにより、第1作動片がマイクロスイッチの作動部を押圧し、マイクロスイッチが作動する。このマイクロスイッチの作動によりエスカレータ制御盤が作動し、駆動機を消勢し、踏段鎖が異常停止される。
【0004】
【特許文献1】特開2003−321186号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
この種の乗客コンベアには、踏段鎖の破断を検出する踏段鎖破断検出装置、移動手摺りに異物の挟まりを検出するハンドガードスイッチ、踏段とスカートガードとの間への異物の挟まりを検出するスカートガードスイッチなどの多くの検出装置がある。そして、この種の乗客コンベアにおいては、安全性を第1に考え、これらの検出装置の接点を常閉式とし、これらの検出装置の接点を踏段鎖を循環移動させる駆動機への通電経路にシリーズに接続し、検出装置の中の1つでも作動すれば、その接点が開成して駆動機への通電が遮断され、踏段鎖が瞬時に停止されるような安全機構が採られている。
【0006】
しかしながら、従来の乗客コンベアの運転管理装置は、エスカレータ制御盤がマイクロスイッチの作動により作動して駆動機を消勢し、踏段鎖を異常停止させるように構成されているので、従来の乗客コンベアの運転管理装置は乗客コンベアの安全機構に組み込まれるようには構成されていなかった。
【0007】
この発明は、上記課題を解決するためになされたもので、常開式のa接点と常閉式のb接点とを有するリミットスイッチを用い、乗客コンベアの安全機構に組み込むことができると共に、安全機構の作動前に踏段鎖の異常伸びの発生を報知できる乗客コンベアの踏段鎖破断検出装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明による乗客コンベアの踏段鎖破断検出装置は、多数の踏段がトラスの乗り口側と降り口側とに設置された一対の鎖車に掛け渡された無端状の踏段鎖に連結され、引っ張り軸がその一端を上記一対の鎖車の一方の鎖車に連結されて他方の鎖車から離反する方向に延設され、圧縮コイルバネが上記引っ張り軸を介して上記一方の鎖車を上記他方の鎖車から離反する方向に付勢するように上記引っ張り軸に装着され、駆動機が上記他方の鎖車を回転駆動することにより上記踏段鎖を循環移動させるように構成された乗客コンベアの踏段鎖破断検出装置であって、出没自在に配設されたプランジャ、該プランジャのストローク量が第1ストローク量を超えると閉成するa接点および該プランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有し、該b接点が上記駆動機への通電経路に直列に接続されるリミットスイッチと、上記引っ張り軸の長さ方向の変位に連動して該引っ張り軸の長さ方向に移動可能に配設され、第1距離移動したときに上記プランジャのストローク量が上記第1ストローク量となり、かつ該第1距離より長い第2距離移動したときに上記プランジャのストローク量が上記第2ストローク量となるように上記プランジャを押し込むカム面を有するスイッチカムと、上記a接点が閉成すると上記踏段鎖の異常伸び発生を報知する報知手段と、を備えている。
【発明の効果】
【0009】
この発明では、プランジャのストローク量が第1ストローク量を超えると閉成するa接点およびプランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有するリミットスイッチを用い、b接点を駆動機への通電経路に直列に接続するとともに、報知手段がa接点の閉成により踏段鎖の異常伸び発生を報知するようにしている。そこで、踏段鎖の破断が発生すると、b接点が開成され、駆動機への通電が遮断され、踏段鎖の循環移動が確実に停止される。また、a接点が閉成すると、踏段鎖の異常伸び発生が報知されるので、踏段鎖の伸びをタイムリーに調整でき、踏段鎖の経時的な伸びの蓄積に起因する踏段鎖の循環移動の停止の発生を未然に防止できる。
このように、この発明によれば、踏段鎖の破断に起因する踏段鎖の循環移動の停止が確実に実行でき、かつ踏段鎖の経時的な伸びの蓄積に起因する踏段鎖の循環移動の停止の発生を未然に防止できる踏段鎖破断検出装置を簡易な、かつ安価な構成で実現できる。
【発明を実施するための最良の形態】
【0010】
以下、本願の実施例を図面に基づいて説明する。
図1はこの発明の一実施の形態に係る踏段鎖破断検出装置が設置されたエスカレータの全体構造を概念的に示す側面図、図2はこの発明の一実施の形態に係る踏段鎖破断検出装置の要部を示す側面図である。図3はこの発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を模式的に示す断面図であり、図3の(a)はa接点が開成状態、かつb接点が閉成状態を示し、図3の(b)はa接点およびb接点が閉成状態を示し、図3の(c)はa接点が閉成状態、かつb接点が開成状態を示している。図4はこの発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を説明する図、図5はこの発明の一実施の形態に係る踏段鎖破断検出装置の動作を説明する図、図6はこの発明の一実施の形態に係る踏段鎖破断検出装置のシステム構成図、図7はこの発明の一実施の形態に係る踏段鎖破断検出装置の動作フロー図である。
【0011】
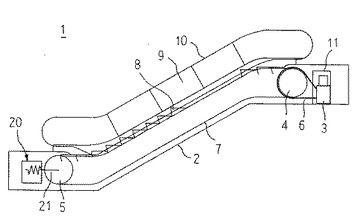
図1および図2において、乗客コンベアとしてのエスカレータ1は、乗り口から降り口に至るように架設されたトラス2と、トラス2の上端側に配設された駆動機3と、トラス2の上端側に配設された上鎖車4と、トラス2の下端側に配設された下鎖車5と、駆動機3の出力を上鎖車4に伝達する駆動鎖6と、無端状をなし、上鎖車4と下鎖車5とに巻き掛けられて、駆動機3の出力が駆動鎖6を介して伝達されて回転駆動する上鎖車4により循環移動する踏段鎖7と、踏段鎖7に連結された多数の踏段8と、トラス2の間口方向の両縁部に立設されてトラス2の長手方向に沿って踏段8を挟むように配置された一対の欄干9と、一対の欄干9のそれぞれに配設されて、踏段8と同期して移動する一対の移動手摺10と、駆動機3を駆動制御するエスカレータ制御盤11と、踏段鎖7の破断を検出する踏段鎖破断検出装置20と、を備えている。
【0012】
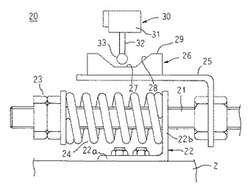
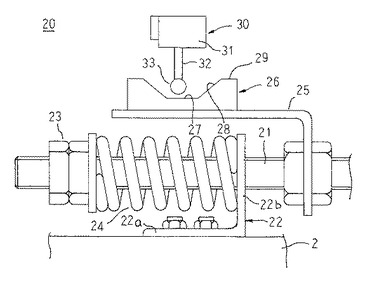
踏段鎖破断検出装置20は、その一端が下鎖車5に連結されて、下鎖車5から上鎖車4と離反する方向に延設された引っ張り軸21と、取付腕22aと支持腕22bとからなるL字状に作製され、支持腕22bが引っ張り軸21と直交するように取付腕22aをトラス2に固定して取り付けられ、引っ張り軸21が支持腕22bに穿設された貫通穴に遊嵌状態に挿通されるフランジ22と、支持腕22bの貫通穴から延出する引っ張り軸21の他端側に螺着された調整ナット23と、引っ張り軸21に外嵌状態に装着されて支持腕22bと調整ナット23との間に縮設され、引っ張り軸21および下鎖車5を介して踏段鎖7に所定の張力を付与する圧縮コイルバネ24と、一端が引っ張り軸21の一端と支持腕22bとの間に固着されて、引っ張り軸21の長さ方向に沿って引っ張り軸21の他端側に延設された取付板25と、取付板25に固着されて、踏段鎖7の張力の変動により生じる引っ張り軸21の変位に連動して移動するスイッチカム26と、スイッチカム26の移動により踏段鎖7の異常伸びの発生を検出するリミットスイッチ30と、リミットスイッチ30の出力を受信して、例えば公衆回線を介して監視センタ12に踏段鎖7の異常伸び発生を予報する、後述する報知手段40と、を備えている。
【0013】
スイッチカム26は、引っ張り軸21の長さ方向と平行な底部27と、底部27からの高さが引っ張り軸21の一端側に向かって漸次高くなる傾斜面に形成された第1カム面28と、第1カム面28から引っ張り軸21の一端側に連設され、底部27からの高さが一定の平坦面に形成された第2カム面29と、を備えている。
【0014】
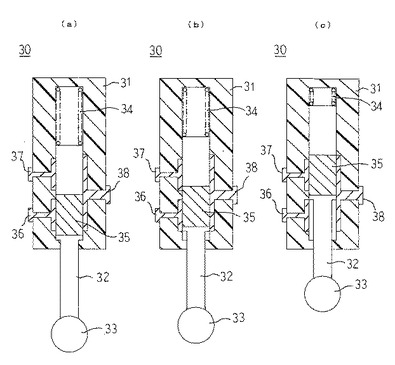
リミットスイッチ30は、図3に示されるように、筐体31と、筐体31に出没自在に配設されたプランジャ32と、プランジャ32の延出端に固着されたプランジャローラ33と、プランジャ32を延出方向に付勢するように筐体31内に縮設されたスプリング34と、プランジャ32の外周面に配設された接触子35と、筐体31に配設された第1乃至第3端子36〜38と、を備えている。プランジャ32は、無負荷の状態では、スプリング34の付勢力により、筐体31からの延出量が最大である初期状態に保持されている。そして、プランジャ32は、プランジャローラ33を介して作用する負荷の大きさに応じてスプリング34を収縮させつつ筐体31内に押し込まれる。このプランジャ32の初期状態からの押し込み量をストローク量とする。
【0015】
第1端子36と第2端子37とは、プランジャ32の出没方向に互いに離間して配置され、第3端子38は、プランジャ32の出没方向に関して、第1端子36と第2端子37との両者に重なるように配置されている。そして、第1乃至第3端子36〜38の位置関係は、プランジャ32のストローク量に応じて、接触子35を介しての導通状態が変化するようになっている。
【0016】
つまり、第1乃至第3端子36〜38は、プランジャ32の筐体31からの延出量が最大である初期状態では、第1端子36と第3端子38とが接触子35を介して導通状態となり、かつ第2端子37と第3端子38とが非導通状態となり、プランジャ32のストローク量が第1ストローク量となると、第1および第2端子36,37と第3端子38とが接触子35を介して導通状態となり、プランジャ32のストローク量が第1ストローク量より大きな第2スロトーク量となると、第1端子36と第3端子38とが非導通状態となり、かつ第2端子37と第3端子38とが接触子35を介して導通状態となるように、構成されている。ここで、第2端子37と第3端子38とが、プランジャ32が第1ストローク量を超えて押し込まれると閉成する常開式のa接点を構成し、第1端子36と第3端子38とが、プランジャ32が第1ストローク量より大きな第2ストローク量を超えて押し込まれると開成する常閉式のb接点を構成している。
【0017】
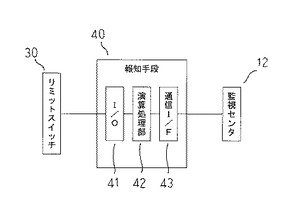
報知手段40は、図6に示すように、入出力回路41、演算処理部42および通信インターフェイス43を備えている。ここで、演算処理部42は、CPUやデータを保持する記憶手段などを備えたマイクロコンピュータで構成されている。なお、報知手段40はエスカレータ制御盤11と別部品として構成しているが、エスカレータ制御盤11が報知手段40を構成するようにしてもよい。
【0018】
つぎに、リミットスイッチ30の動作について図3および図4を参照しつつ説明する。
まず、プランジャ32は筐体31に出没自在に配設されている。そして、初期状態では、図3に(a)に示されるように、プランジャ32はスプリング34の付勢力により筐体31から最大量、延出されている。この時、第1端子36と第3端子38とが接触子35を介して導通状態となり、かつ第2端子37と第3端子38とが非導通状態となる。即ち、a接点が開成状態となり、b接点が閉成状態となる。
プランジャ32がスプリング34の付勢力に抗して初期状態から第1ストローク量押し込まれると、図3の(b)に示されるように、第1および第2端子36,37と第3端子38とが接触子35を介して導通状態となる。即ち、a接点およびb接点が閉成状態となる。
【0019】
プランジャ32がスプリング34の付勢力に抗して初期状態から第2ストローク量押し込まれると、図3の(c)に示されるように、第2端子37と第3端子38とが接触子35を介して導通状態となり、かつ第1端子36と第3端子38とが非導通状態となる。即ち、a接点が閉成状態となり、b接点が開成状態となる。
【0020】
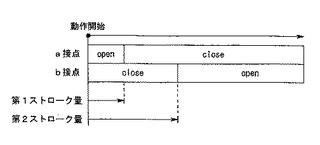
このように、図4に示されるように、プランジャ32の押し込み量が第1ストローク量未満ではa接点が開成状態、b接点が閉成状態となり、プランジャ32の押し込み量が第1ストローク量以上、第2ストローク量未満ではa接点およびb接点が共に閉成状態となり、プランジャ32の押し込み量が第2ストローク量以上ではa接点が閉成状態、b接点が開成状態となる。
なお、第1および第2ストローク量は第1乃至第3端子36〜38の位置関係を調整することにより適宜設定することができるが、ここでは、第1ストローク量が1.0mm、第2ストローク量が2.5mmに設定されたリミットスイッチ30を用いている。
【0021】
つぎに、このように構成された踏段鎖破断検出装置20の動作について図5を参照しつつ説明する。
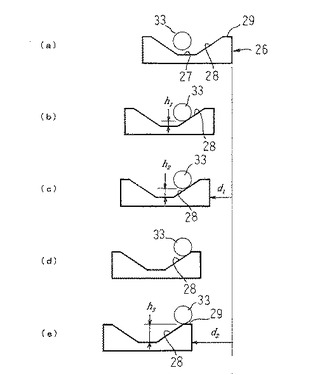
エスカレータ1においては、初期状態では、調整ナット23の締着力が調整され、所定の張力が踏段鎖7に付与されるように圧縮コイルバネ24の収縮量が調整されている。そして、スイッチカム26が初期位置から第1距離および第2距離移動したときに、プランジャ32がそれぞれ第1ストローク量および第2ストローク量押し込まれるように、スイッチカム26およびリミットスイッチ30の位置が調整されている。この時、プランジャローラ33は、図5の(a)に示されるように、スイッチカム26の底部27および第1カム面28に対して離間する初期位置に位置している。また、この踏段鎖破断検出装置20の第1端子36と第3端子38と(b接点)が、ハンドガードスイッチ、スカートガードスイッチなどの他の検出装置のb接点とともに、駆動機3への通電経路に直列に接続されている。
【0022】
このエスカレータ1の運行により、踏段鎖7に経時的に伸びが発生する。この踏段鎖7が伸びると、圧縮コイルバネ24が伸長し、引っ張り軸21が図2中左方向に移動する。これにより、下鎖車5がフランジ22側に移動され、踏段鎖7に付与される所定の張力が確保される。この踏段鎖7の伸びに連動して、引っ張り軸21が自身の長さ方向に沿って他端側に移動する。同様に、取付板25に取り付けられたスイッチカム26が、引っ張り軸21の長さ方向に沿って引っ張り軸21の他端側に移動する。
【0023】
そして、スイッチカム26が移動し、プランジャローラ33が、第1カム面28に当接する。この時、プランジャローラ33は、図5の(b)に示されるように、底部27からの初期高さh1を維持している。スイッチカム26がさらに移動すると、第1カム面28がプランジャローラ33を押し上げつつ移動する。これにより、プランジャローラ33の底部27からの高さが徐々に高くなる。
そして、図5の(c)に示されるように、スイッチカム26が初期位置から第1距離d1だけ移動すると、プランジャローラ33の底部27からの高さがh2となる。この時、プランジャのストローク量(h2−h1)が第1ストローク量に達し、a接点が閉成する。スイッチカム26がさらに移動すると、図5の(d)に示されるように、第1カム面28がプランジャローラ33をさらに押し上げつつ移動する。
【0024】
そして、図5の(e)に示されるように、スイッチカム26が初期位置から第2距離d2だけ移動すると、プランジャローラ33の底部27からの高さがh3となる。この時、プランジャのストローク量(h3−h1)が第2ストローク量に達し、b接点が開成する。スイッチカム26がさらに移動すると、プランジャローラ33は第1カム面28から第2カム面29に乗り上げ、プランジャ32のストローク量が第2ストローク量を超える値に保持される。リミットスイッチ30のb接点が開成すると、駆動機3への通電経路が瞬時に遮断され、踏段鎖7の循環移動が停止される。
【0025】
ここで、踏段鎖7が破断した場合には、引っ張り軸21が圧縮コイルバネ24の付勢力を放勢する方向に移動し、b接点が開成される。従って、踏段鎖7の破断時には、踏段鎖7の循環移動が確実に、かつ瞬時に停止され、二次災害の発生が抑制される。
また、スイッチカム26の移動距離は踏段鎖7の伸びに対応しており、第1距離および第2距離は、踏段鎖7に発生する伸びの保守管理範囲に基づいて設定されるものであり、例えば第1距離は9.6mmに、第2距離は12.5mmに設定される。
【0026】
つぎに、報知手段40による踏段鎖7の異常伸び発生の報知動作について図6および図7を参照しつつ説明する。
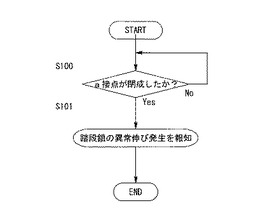
報知手段40の演算処理部42は、入出力回路41を介してリミットスイッチ30の第2端子37(a接点)からの出力を受信している(S100)。そして、a接点が閉成されると、演算処理部42は、通信インターフェイス43を介して、踏段鎖7の異常伸び発生を監視センタ12に出力、報知する(S101)。
【0027】
監視センタ12では、踏段鎖7の異常伸び発生の信号を受信すると、踏段鎖7の保守点検時期の到来を認識し、保守作業者を派遣してエスカレータ1の保守点検を行う。そして、保守点検終了後、調整ナット23の締着力を調整し、所定の張力が踏段鎖7に付与されるように圧縮コイルバネ24の収縮量を調整する。そして、スイッチカム26およびリミットスイッチ30の位置を再調整する。
【0028】
このように、この実施の形態によれば、常開式のa接点と常閉式のb接点とを有するリミットスイッチ30と、踏段鎖7の伸びに連動して移動するスイッチカム26と、を用いているので、踏段鎖破断検出装置20を簡易、かつ安価な構成で構築できる。
また、スイッチカム26が第1距離移動すると、a接点が閉成し、踏段鎖7の異常伸び発生を報知し、スイッチカム26が第1距離より長い第2距離移動すると、b接点が開成し、踏段鎖7の循環移動を停止させるように構成されている。そこで、踏段鎖7が破断すれば、踏段鎖7の循環移動が速やかに停止される。
【0029】
また、第1距離を踏段鎖7の伸びの保守管理範囲の下限値に対応する値に設定すれば、踏段鎖7に発生する伸びに十分余裕がある状態で、保守点検時期の到来を予報できる。これにより、踏段鎖7の伸びをタイムリーに調整でき、踏段鎖7の経時的な伸びの蓄積に起因する踏段鎖7の循環移動の停止の発生を未然に防止できる。また、第2距離を踏段鎖7の伸びの保守管理範囲の上限値に対応する値に設定すれば、保守点検が遅れても、踏段鎖7の伸びが第2距離に達すると、踏段鎖7の循環移動が停止される。これにより、不良な張力がかかった状態で踏段鎖7の循環移動が継続することが未然に防止され、駆動軸などの軸受に過大な負荷がかかって、寿命を短くするような事態を未然に防止できる。
【0030】
なお、上記実施の形態では、エスカレータに適用するものとして説明しているが、本発明は、エスカレータに限らず、動く歩道などの乗客コンベアに適用しても同様の効果が得られる。
また、リミットスイッチは、図3に示されるリミットスイッチ30の構成に限定されるものではなく、a接点がプランジャのストローク量が第1ストローク量を超えると閉成し、b接点がプランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するように構成されていればよい。
【図面の簡単な説明】
【0031】
【図1】この発明の一実施の形態に係る踏段鎖破断検出装置が設置されたエスカレータの全体構造を概念的に示す側面図である。
【図2】この発明の一実施の形態に係る踏段鎖破断検出装置の要部を示す側面図である。
【図3】この発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を模式的に示す断面図である。
【図4】この発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を説明する図である。
【図5】この発明の一実施の形態に係る踏段鎖破断検出装置の動作を説明する図である。
【図6】この発明の一実施の形態に係る踏段鎖破断検出装置のシステム構成図である。
【図7】この発明の一実施の形態に係る踏段鎖破断検出装置の動作フロー図である。
【符号の説明】
【0032】
1 エスカレータ(乗客コンベア)、2 トラス、3 駆動機、4 上鎖車、5 下鎖車、7 踏段鎖、8 踏み段、20 踏段鎖破断検出装置、21 引っ張り軸、24 圧縮コイルバネ、26 スイッチカム、28 第1カム面、30 リミットスイッチ、32 プランジャ、35 接触子、36 第1端子(b接点)、37 第2端子(a接点)、38 第3端子、40 報知手段。
【技術分野】
【0001】
この発明は、エスカレータや動く歩道などの乗客コンベアの踏段鎖破断検出装置に関するものである。
【背景技術】
【0002】
従来の乗客コンベアの運転管理装置では、多数の踏段を無端状に連結してなる踏段鎖がトラスの上端側および下端側に設けられた上鎖車および下鎖車に巻き掛けられ、一端を下鎖車に連結された引っ張り軸がその他端をトラスに固定されたブラケットに挿通され、圧縮コイルバネが引っ張り軸の他端に螺着された調整ナットとブラケットとの間に縮設され、踏段鎖に所定の張力を付与している。第1作動片が引っ張り軸の挿通端の調整ナット側に配置され、第2作動片が引っ張り軸の挿通端の先端寄りに配置されている。さらに、マイクロスイッチの作動部が第1作動片と第2作動片との間に配設されている(例えば、特許文献1参照)。
【0003】
この従来の乗客コンベアの運転管理装置においては、上鎖車がトラスの上端側に設けられた駆動機により駆動され、踏段鎖が循環移動される。そして、踏段鎖に異常な伸びが発生したり、踏段鎖が破断した場合には、下鎖車が圧縮コイルバネの付勢力により、トラス下端側に異常変位する。これにより、第1作動片がマイクロスイッチの作動部を押圧し、マイクロスイッチが作動する。このマイクロスイッチの作動によりエスカレータ制御盤が作動し、駆動機を消勢し、踏段鎖が異常停止される。
【0004】
【特許文献1】特開2003−321186号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
この種の乗客コンベアには、踏段鎖の破断を検出する踏段鎖破断検出装置、移動手摺りに異物の挟まりを検出するハンドガードスイッチ、踏段とスカートガードとの間への異物の挟まりを検出するスカートガードスイッチなどの多くの検出装置がある。そして、この種の乗客コンベアにおいては、安全性を第1に考え、これらの検出装置の接点を常閉式とし、これらの検出装置の接点を踏段鎖を循環移動させる駆動機への通電経路にシリーズに接続し、検出装置の中の1つでも作動すれば、その接点が開成して駆動機への通電が遮断され、踏段鎖が瞬時に停止されるような安全機構が採られている。
【0006】
しかしながら、従来の乗客コンベアの運転管理装置は、エスカレータ制御盤がマイクロスイッチの作動により作動して駆動機を消勢し、踏段鎖を異常停止させるように構成されているので、従来の乗客コンベアの運転管理装置は乗客コンベアの安全機構に組み込まれるようには構成されていなかった。
【0007】
この発明は、上記課題を解決するためになされたもので、常開式のa接点と常閉式のb接点とを有するリミットスイッチを用い、乗客コンベアの安全機構に組み込むことができると共に、安全機構の作動前に踏段鎖の異常伸びの発生を報知できる乗客コンベアの踏段鎖破断検出装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明による乗客コンベアの踏段鎖破断検出装置は、多数の踏段がトラスの乗り口側と降り口側とに設置された一対の鎖車に掛け渡された無端状の踏段鎖に連結され、引っ張り軸がその一端を上記一対の鎖車の一方の鎖車に連結されて他方の鎖車から離反する方向に延設され、圧縮コイルバネが上記引っ張り軸を介して上記一方の鎖車を上記他方の鎖車から離反する方向に付勢するように上記引っ張り軸に装着され、駆動機が上記他方の鎖車を回転駆動することにより上記踏段鎖を循環移動させるように構成された乗客コンベアの踏段鎖破断検出装置であって、出没自在に配設されたプランジャ、該プランジャのストローク量が第1ストローク量を超えると閉成するa接点および該プランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有し、該b接点が上記駆動機への通電経路に直列に接続されるリミットスイッチと、上記引っ張り軸の長さ方向の変位に連動して該引っ張り軸の長さ方向に移動可能に配設され、第1距離移動したときに上記プランジャのストローク量が上記第1ストローク量となり、かつ該第1距離より長い第2距離移動したときに上記プランジャのストローク量が上記第2ストローク量となるように上記プランジャを押し込むカム面を有するスイッチカムと、上記a接点が閉成すると上記踏段鎖の異常伸び発生を報知する報知手段と、を備えている。
【発明の効果】
【0009】
この発明では、プランジャのストローク量が第1ストローク量を超えると閉成するa接点およびプランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有するリミットスイッチを用い、b接点を駆動機への通電経路に直列に接続するとともに、報知手段がa接点の閉成により踏段鎖の異常伸び発生を報知するようにしている。そこで、踏段鎖の破断が発生すると、b接点が開成され、駆動機への通電が遮断され、踏段鎖の循環移動が確実に停止される。また、a接点が閉成すると、踏段鎖の異常伸び発生が報知されるので、踏段鎖の伸びをタイムリーに調整でき、踏段鎖の経時的な伸びの蓄積に起因する踏段鎖の循環移動の停止の発生を未然に防止できる。
このように、この発明によれば、踏段鎖の破断に起因する踏段鎖の循環移動の停止が確実に実行でき、かつ踏段鎖の経時的な伸びの蓄積に起因する踏段鎖の循環移動の停止の発生を未然に防止できる踏段鎖破断検出装置を簡易な、かつ安価な構成で実現できる。
【発明を実施するための最良の形態】
【0010】
以下、本願の実施例を図面に基づいて説明する。
図1はこの発明の一実施の形態に係る踏段鎖破断検出装置が設置されたエスカレータの全体構造を概念的に示す側面図、図2はこの発明の一実施の形態に係る踏段鎖破断検出装置の要部を示す側面図である。図3はこの発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を模式的に示す断面図であり、図3の(a)はa接点が開成状態、かつb接点が閉成状態を示し、図3の(b)はa接点およびb接点が閉成状態を示し、図3の(c)はa接点が閉成状態、かつb接点が開成状態を示している。図4はこの発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を説明する図、図5はこの発明の一実施の形態に係る踏段鎖破断検出装置の動作を説明する図、図6はこの発明の一実施の形態に係る踏段鎖破断検出装置のシステム構成図、図7はこの発明の一実施の形態に係る踏段鎖破断検出装置の動作フロー図である。
【0011】
図1および図2において、乗客コンベアとしてのエスカレータ1は、乗り口から降り口に至るように架設されたトラス2と、トラス2の上端側に配設された駆動機3と、トラス2の上端側に配設された上鎖車4と、トラス2の下端側に配設された下鎖車5と、駆動機3の出力を上鎖車4に伝達する駆動鎖6と、無端状をなし、上鎖車4と下鎖車5とに巻き掛けられて、駆動機3の出力が駆動鎖6を介して伝達されて回転駆動する上鎖車4により循環移動する踏段鎖7と、踏段鎖7に連結された多数の踏段8と、トラス2の間口方向の両縁部に立設されてトラス2の長手方向に沿って踏段8を挟むように配置された一対の欄干9と、一対の欄干9のそれぞれに配設されて、踏段8と同期して移動する一対の移動手摺10と、駆動機3を駆動制御するエスカレータ制御盤11と、踏段鎖7の破断を検出する踏段鎖破断検出装置20と、を備えている。
【0012】
踏段鎖破断検出装置20は、その一端が下鎖車5に連結されて、下鎖車5から上鎖車4と離反する方向に延設された引っ張り軸21と、取付腕22aと支持腕22bとからなるL字状に作製され、支持腕22bが引っ張り軸21と直交するように取付腕22aをトラス2に固定して取り付けられ、引っ張り軸21が支持腕22bに穿設された貫通穴に遊嵌状態に挿通されるフランジ22と、支持腕22bの貫通穴から延出する引っ張り軸21の他端側に螺着された調整ナット23と、引っ張り軸21に外嵌状態に装着されて支持腕22bと調整ナット23との間に縮設され、引っ張り軸21および下鎖車5を介して踏段鎖7に所定の張力を付与する圧縮コイルバネ24と、一端が引っ張り軸21の一端と支持腕22bとの間に固着されて、引っ張り軸21の長さ方向に沿って引っ張り軸21の他端側に延設された取付板25と、取付板25に固着されて、踏段鎖7の張力の変動により生じる引っ張り軸21の変位に連動して移動するスイッチカム26と、スイッチカム26の移動により踏段鎖7の異常伸びの発生を検出するリミットスイッチ30と、リミットスイッチ30の出力を受信して、例えば公衆回線を介して監視センタ12に踏段鎖7の異常伸び発生を予報する、後述する報知手段40と、を備えている。
【0013】
スイッチカム26は、引っ張り軸21の長さ方向と平行な底部27と、底部27からの高さが引っ張り軸21の一端側に向かって漸次高くなる傾斜面に形成された第1カム面28と、第1カム面28から引っ張り軸21の一端側に連設され、底部27からの高さが一定の平坦面に形成された第2カム面29と、を備えている。
【0014】
リミットスイッチ30は、図3に示されるように、筐体31と、筐体31に出没自在に配設されたプランジャ32と、プランジャ32の延出端に固着されたプランジャローラ33と、プランジャ32を延出方向に付勢するように筐体31内に縮設されたスプリング34と、プランジャ32の外周面に配設された接触子35と、筐体31に配設された第1乃至第3端子36〜38と、を備えている。プランジャ32は、無負荷の状態では、スプリング34の付勢力により、筐体31からの延出量が最大である初期状態に保持されている。そして、プランジャ32は、プランジャローラ33を介して作用する負荷の大きさに応じてスプリング34を収縮させつつ筐体31内に押し込まれる。このプランジャ32の初期状態からの押し込み量をストローク量とする。
【0015】
第1端子36と第2端子37とは、プランジャ32の出没方向に互いに離間して配置され、第3端子38は、プランジャ32の出没方向に関して、第1端子36と第2端子37との両者に重なるように配置されている。そして、第1乃至第3端子36〜38の位置関係は、プランジャ32のストローク量に応じて、接触子35を介しての導通状態が変化するようになっている。
【0016】
つまり、第1乃至第3端子36〜38は、プランジャ32の筐体31からの延出量が最大である初期状態では、第1端子36と第3端子38とが接触子35を介して導通状態となり、かつ第2端子37と第3端子38とが非導通状態となり、プランジャ32のストローク量が第1ストローク量となると、第1および第2端子36,37と第3端子38とが接触子35を介して導通状態となり、プランジャ32のストローク量が第1ストローク量より大きな第2スロトーク量となると、第1端子36と第3端子38とが非導通状態となり、かつ第2端子37と第3端子38とが接触子35を介して導通状態となるように、構成されている。ここで、第2端子37と第3端子38とが、プランジャ32が第1ストローク量を超えて押し込まれると閉成する常開式のa接点を構成し、第1端子36と第3端子38とが、プランジャ32が第1ストローク量より大きな第2ストローク量を超えて押し込まれると開成する常閉式のb接点を構成している。
【0017】
報知手段40は、図6に示すように、入出力回路41、演算処理部42および通信インターフェイス43を備えている。ここで、演算処理部42は、CPUやデータを保持する記憶手段などを備えたマイクロコンピュータで構成されている。なお、報知手段40はエスカレータ制御盤11と別部品として構成しているが、エスカレータ制御盤11が報知手段40を構成するようにしてもよい。
【0018】
つぎに、リミットスイッチ30の動作について図3および図4を参照しつつ説明する。
まず、プランジャ32は筐体31に出没自在に配設されている。そして、初期状態では、図3に(a)に示されるように、プランジャ32はスプリング34の付勢力により筐体31から最大量、延出されている。この時、第1端子36と第3端子38とが接触子35を介して導通状態となり、かつ第2端子37と第3端子38とが非導通状態となる。即ち、a接点が開成状態となり、b接点が閉成状態となる。
プランジャ32がスプリング34の付勢力に抗して初期状態から第1ストローク量押し込まれると、図3の(b)に示されるように、第1および第2端子36,37と第3端子38とが接触子35を介して導通状態となる。即ち、a接点およびb接点が閉成状態となる。
【0019】
プランジャ32がスプリング34の付勢力に抗して初期状態から第2ストローク量押し込まれると、図3の(c)に示されるように、第2端子37と第3端子38とが接触子35を介して導通状態となり、かつ第1端子36と第3端子38とが非導通状態となる。即ち、a接点が閉成状態となり、b接点が開成状態となる。
【0020】
このように、図4に示されるように、プランジャ32の押し込み量が第1ストローク量未満ではa接点が開成状態、b接点が閉成状態となり、プランジャ32の押し込み量が第1ストローク量以上、第2ストローク量未満ではa接点およびb接点が共に閉成状態となり、プランジャ32の押し込み量が第2ストローク量以上ではa接点が閉成状態、b接点が開成状態となる。
なお、第1および第2ストローク量は第1乃至第3端子36〜38の位置関係を調整することにより適宜設定することができるが、ここでは、第1ストローク量が1.0mm、第2ストローク量が2.5mmに設定されたリミットスイッチ30を用いている。
【0021】
つぎに、このように構成された踏段鎖破断検出装置20の動作について図5を参照しつつ説明する。
エスカレータ1においては、初期状態では、調整ナット23の締着力が調整され、所定の張力が踏段鎖7に付与されるように圧縮コイルバネ24の収縮量が調整されている。そして、スイッチカム26が初期位置から第1距離および第2距離移動したときに、プランジャ32がそれぞれ第1ストローク量および第2ストローク量押し込まれるように、スイッチカム26およびリミットスイッチ30の位置が調整されている。この時、プランジャローラ33は、図5の(a)に示されるように、スイッチカム26の底部27および第1カム面28に対して離間する初期位置に位置している。また、この踏段鎖破断検出装置20の第1端子36と第3端子38と(b接点)が、ハンドガードスイッチ、スカートガードスイッチなどの他の検出装置のb接点とともに、駆動機3への通電経路に直列に接続されている。
【0022】
このエスカレータ1の運行により、踏段鎖7に経時的に伸びが発生する。この踏段鎖7が伸びると、圧縮コイルバネ24が伸長し、引っ張り軸21が図2中左方向に移動する。これにより、下鎖車5がフランジ22側に移動され、踏段鎖7に付与される所定の張力が確保される。この踏段鎖7の伸びに連動して、引っ張り軸21が自身の長さ方向に沿って他端側に移動する。同様に、取付板25に取り付けられたスイッチカム26が、引っ張り軸21の長さ方向に沿って引っ張り軸21の他端側に移動する。
【0023】
そして、スイッチカム26が移動し、プランジャローラ33が、第1カム面28に当接する。この時、プランジャローラ33は、図5の(b)に示されるように、底部27からの初期高さh1を維持している。スイッチカム26がさらに移動すると、第1カム面28がプランジャローラ33を押し上げつつ移動する。これにより、プランジャローラ33の底部27からの高さが徐々に高くなる。
そして、図5の(c)に示されるように、スイッチカム26が初期位置から第1距離d1だけ移動すると、プランジャローラ33の底部27からの高さがh2となる。この時、プランジャのストローク量(h2−h1)が第1ストローク量に達し、a接点が閉成する。スイッチカム26がさらに移動すると、図5の(d)に示されるように、第1カム面28がプランジャローラ33をさらに押し上げつつ移動する。
【0024】
そして、図5の(e)に示されるように、スイッチカム26が初期位置から第2距離d2だけ移動すると、プランジャローラ33の底部27からの高さがh3となる。この時、プランジャのストローク量(h3−h1)が第2ストローク量に達し、b接点が開成する。スイッチカム26がさらに移動すると、プランジャローラ33は第1カム面28から第2カム面29に乗り上げ、プランジャ32のストローク量が第2ストローク量を超える値に保持される。リミットスイッチ30のb接点が開成すると、駆動機3への通電経路が瞬時に遮断され、踏段鎖7の循環移動が停止される。
【0025】
ここで、踏段鎖7が破断した場合には、引っ張り軸21が圧縮コイルバネ24の付勢力を放勢する方向に移動し、b接点が開成される。従って、踏段鎖7の破断時には、踏段鎖7の循環移動が確実に、かつ瞬時に停止され、二次災害の発生が抑制される。
また、スイッチカム26の移動距離は踏段鎖7の伸びに対応しており、第1距離および第2距離は、踏段鎖7に発生する伸びの保守管理範囲に基づいて設定されるものであり、例えば第1距離は9.6mmに、第2距離は12.5mmに設定される。
【0026】
つぎに、報知手段40による踏段鎖7の異常伸び発生の報知動作について図6および図7を参照しつつ説明する。
報知手段40の演算処理部42は、入出力回路41を介してリミットスイッチ30の第2端子37(a接点)からの出力を受信している(S100)。そして、a接点が閉成されると、演算処理部42は、通信インターフェイス43を介して、踏段鎖7の異常伸び発生を監視センタ12に出力、報知する(S101)。
【0027】
監視センタ12では、踏段鎖7の異常伸び発生の信号を受信すると、踏段鎖7の保守点検時期の到来を認識し、保守作業者を派遣してエスカレータ1の保守点検を行う。そして、保守点検終了後、調整ナット23の締着力を調整し、所定の張力が踏段鎖7に付与されるように圧縮コイルバネ24の収縮量を調整する。そして、スイッチカム26およびリミットスイッチ30の位置を再調整する。
【0028】
このように、この実施の形態によれば、常開式のa接点と常閉式のb接点とを有するリミットスイッチ30と、踏段鎖7の伸びに連動して移動するスイッチカム26と、を用いているので、踏段鎖破断検出装置20を簡易、かつ安価な構成で構築できる。
また、スイッチカム26が第1距離移動すると、a接点が閉成し、踏段鎖7の異常伸び発生を報知し、スイッチカム26が第1距離より長い第2距離移動すると、b接点が開成し、踏段鎖7の循環移動を停止させるように構成されている。そこで、踏段鎖7が破断すれば、踏段鎖7の循環移動が速やかに停止される。
【0029】
また、第1距離を踏段鎖7の伸びの保守管理範囲の下限値に対応する値に設定すれば、踏段鎖7に発生する伸びに十分余裕がある状態で、保守点検時期の到来を予報できる。これにより、踏段鎖7の伸びをタイムリーに調整でき、踏段鎖7の経時的な伸びの蓄積に起因する踏段鎖7の循環移動の停止の発生を未然に防止できる。また、第2距離を踏段鎖7の伸びの保守管理範囲の上限値に対応する値に設定すれば、保守点検が遅れても、踏段鎖7の伸びが第2距離に達すると、踏段鎖7の循環移動が停止される。これにより、不良な張力がかかった状態で踏段鎖7の循環移動が継続することが未然に防止され、駆動軸などの軸受に過大な負荷がかかって、寿命を短くするような事態を未然に防止できる。
【0030】
なお、上記実施の形態では、エスカレータに適用するものとして説明しているが、本発明は、エスカレータに限らず、動く歩道などの乗客コンベアに適用しても同様の効果が得られる。
また、リミットスイッチは、図3に示されるリミットスイッチ30の構成に限定されるものではなく、a接点がプランジャのストローク量が第1ストローク量を超えると閉成し、b接点がプランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するように構成されていればよい。
【図面の簡単な説明】
【0031】
【図1】この発明の一実施の形態に係る踏段鎖破断検出装置が設置されたエスカレータの全体構造を概念的に示す側面図である。
【図2】この発明の一実施の形態に係る踏段鎖破断検出装置の要部を示す側面図である。
【図3】この発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を模式的に示す断面図である。
【図4】この発明の一実施の形態に係る踏段鎖破断検出装置に適用されるリミットスイッチの動作を説明する図である。
【図5】この発明の一実施の形態に係る踏段鎖破断検出装置の動作を説明する図である。
【図6】この発明の一実施の形態に係る踏段鎖破断検出装置のシステム構成図である。
【図7】この発明の一実施の形態に係る踏段鎖破断検出装置の動作フロー図である。
【符号の説明】
【0032】
1 エスカレータ(乗客コンベア)、2 トラス、3 駆動機、4 上鎖車、5 下鎖車、7 踏段鎖、8 踏み段、20 踏段鎖破断検出装置、21 引っ張り軸、24 圧縮コイルバネ、26 スイッチカム、28 第1カム面、30 リミットスイッチ、32 プランジャ、35 接触子、36 第1端子(b接点)、37 第2端子(a接点)、38 第3端子、40 報知手段。
【特許請求の範囲】
【請求項1】
多数の踏段がトラスの乗り口側と降り口側とに設置された一対の鎖車に掛け渡された無端状の踏段鎖に連結され、引っ張り軸がその一端を上記一対の鎖車の一方の鎖車に連結されて他方の鎖車から離反する方向に延設され、圧縮コイルバネが上記引っ張り軸を介して上記一方の鎖車を上記他方の鎖車から離反する方向に付勢するように上記引っ張り軸に装着され、駆動機が上記他方の鎖車を回転駆動することにより上記踏段鎖を循環移動させるように構成された乗客コンベアの踏段鎖破断検出装置であって、
出没自在に配設されたプランジャ、該プランジャのストローク量が第1ストローク量を超えると閉成するa接点および該プランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有し、該b接点が上記駆動機への通電経路に直列に接続されるリミットスイッチと、
上記引っ張り軸の長さ方向の変位に連動して該引っ張り軸の長さ方向に移動可能に配設され、第1距離移動したときに上記プランジャのストローク量が上記第1ストローク量となり、かつ該第1距離より長い第2距離移動したときに上記プランジャのストローク量が上記第2ストローク量となるように上記プランジャを押し込むカム面を有するスイッチカムと、
上記a接点が閉成すると上記踏段鎖の異常伸び発生を報知する報知手段と、
を備えたことを特徴とする乗客コンベアの踏段鎖破断検出装置。
【請求項1】
多数の踏段がトラスの乗り口側と降り口側とに設置された一対の鎖車に掛け渡された無端状の踏段鎖に連結され、引っ張り軸がその一端を上記一対の鎖車の一方の鎖車に連結されて他方の鎖車から離反する方向に延設され、圧縮コイルバネが上記引っ張り軸を介して上記一方の鎖車を上記他方の鎖車から離反する方向に付勢するように上記引っ張り軸に装着され、駆動機が上記他方の鎖車を回転駆動することにより上記踏段鎖を循環移動させるように構成された乗客コンベアの踏段鎖破断検出装置であって、
出没自在に配設されたプランジャ、該プランジャのストローク量が第1ストローク量を超えると閉成するa接点および該プランジャのストローク量が第1ストローク量より大きな第2ストローク量を超えると開成するb接点を有し、該b接点が上記駆動機への通電経路に直列に接続されるリミットスイッチと、
上記引っ張り軸の長さ方向の変位に連動して該引っ張り軸の長さ方向に移動可能に配設され、第1距離移動したときに上記プランジャのストローク量が上記第1ストローク量となり、かつ該第1距離より長い第2距離移動したときに上記プランジャのストローク量が上記第2ストローク量となるように上記プランジャを押し込むカム面を有するスイッチカムと、
上記a接点が閉成すると上記踏段鎖の異常伸び発生を報知する報知手段と、
を備えたことを特徴とする乗客コンベアの踏段鎖破断検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−83960(P2009−83960A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−253395(P2007−253395)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]