
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、植付作業機を水平制御する乗用田植機などの乗用移植機に関する。
【背景技術】
【0002】
植付作業機の走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化可能に構成すると共に、植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段を備える乗用移植機が知られている(例えば、特許文献1参照)。このような乗用移植機では、走行機体の左右傾斜にかかわらず、植付作業機を水平姿勢(田面に対して平行な姿勢)に維持することができるので、良好な植付精度が得られる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−292608号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような乗用移植機では、格納やメンテナンスに際して植付作業機を地面に下ろすことがある。この場合、植付作業機を地面に直接下ろすと、破損のおそれがあるだけでなく、植付作業機の底部のメンテナンスが困難になるので、植付作業機を非接地姿勢に保持するスタンド装置が用いられる。スタンド装置としては、例えば、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機に設けられ、植付作業機を地面に下ろす際にスタンド姿勢とされるものが知られている。
【0005】
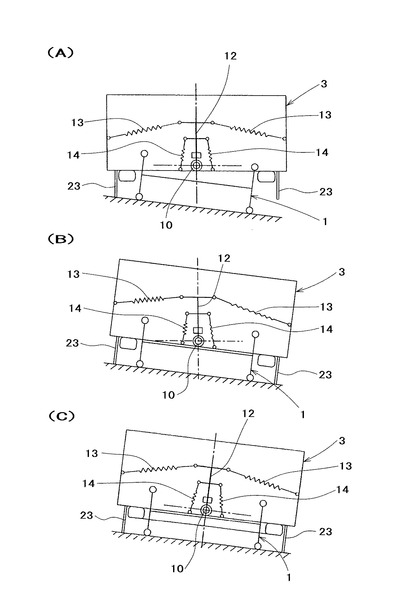
しかしながら、上述した水平制御手段を備える乗用移植機では、図9の(A)に示すように、植付作業機を傾斜した地面に下ろす場合、植付作業機が水平制御によって水平姿勢を維持し、地面に対して傾斜した姿勢で接地する可能性があるので、植付作業機や強制傾斜機構が破損するおそれがあった。
【0006】
尚、走行機体と植付作業機との間に、植付作業機の従動的な左右傾斜を許容するローリング弾機を介設した乗用移植機では、図9の(B)に示すように、水平制御状態であっても植付作業機を傾斜した地面に沿って接地させることが可能であるが、この場合には、傾斜角に応じた力がローリング弾機に蓄勢されるので、植付作業機を地面から上昇させる際、ローリング弾機の蓄勢力で植付作業機が大きく揺れるおそれがある。
【課題を解決するための手段】
【0007】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体の後部に昇降自在かつ左右傾斜自在に連結される植付作業機と、前記植付作業機の前記走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化させる強制傾斜機構と、前記植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で前記植付作業機に設けられ、前記植付作業機を地面に下ろす際にスタンド姿勢とされるスタンド装置と、を備える乗用移植機であって、前記スタンド装置の姿勢を検出するスタンド姿勢検出手段と、前記スタンド装置がスタンド姿勢のとき、前記植付作業機が前記走行機体に対して平行となるように前記アクチュエータを駆動制御する平行制御手段と、を備えることを特徴とする。
【発明の効果】
【0008】
請求項1の発明によれば、スタンド装置がスタンド姿勢のときは、植付作業機が走行機体に対して平行となるように制御されるので、植付作業機を傾斜した地面に下ろす場合であっても、植付作業機を傾斜した地面に沿って接地させることができ、その結果、植付作業機や強制傾斜機構の破損を防止できるだけでなく、植付作業機を地面から上昇させる際に植付作業機が大きく揺れることもない。
【図面の簡単な説明】
【0009】
【図1】乗用田植機の全体側面図である。
【図2】植付作業機の要部正面図である。
【図3】強制傾斜機構の正面図である。
【図4】強制傾斜機構の側面図である。
【図5】スタンド装置の正面図である。
【図6】スタンド装置の側面図である。
【図7】制御部の入出力を示すブロック図である。
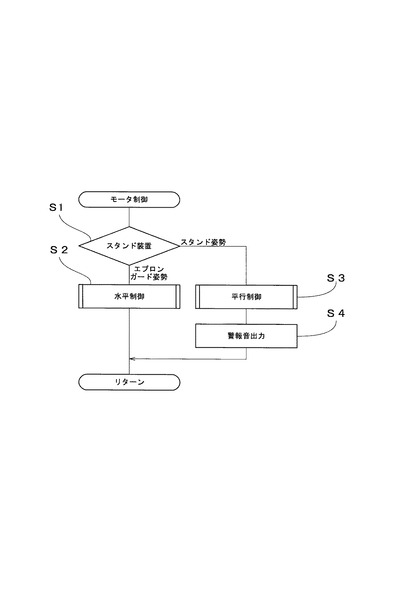
【図8】モータ制御の制御手順を示すフローチャートである。
【図9】(A)は水平制御状態で植付作業機を地面に下ろした場合を示す乗用田植機の概略正面図、(B)は水平制御状態で植付作業機を地面に下ろし、ローリング弾機のバネ力に抗して植付作業機を地面に沿わせた場合を示す乗用田植機の概略正面図、(C)は平行制御状態(水平制御切り)で植付作業機を地面に下ろした場合を示す乗用田植機の概略正面図である。
【発明を実施するための形態】
【0010】
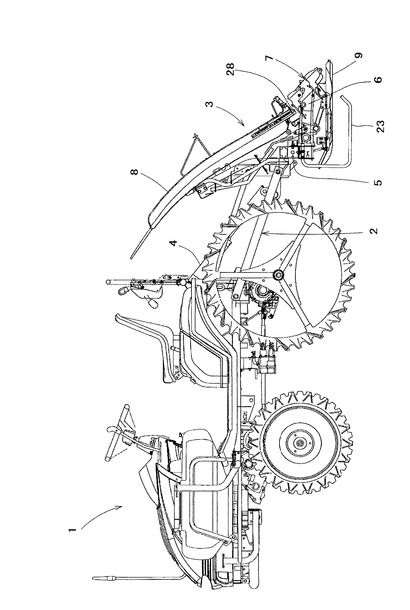
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は乗用田植機(乗用移植機)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。走行機体1と昇降リンク機構2との間には、リフトシリンダ4が介設されており、該リフトシリンダ4の油圧伸縮作動に伴って植付作業機3が昇降されるようになっている。
【0011】
図1及び図2に示すように、植付作業機3は、左右両側に苗載台支持ステー5aが立設される植付部フレーム5、該植付部フレーム5から後方に延出する複数のプランタケース6、該プランタケース6の後端部に設けられる植付機構7、植付部フレーム5に左右移動自在に支持され、植付機構7の動作に合わせて強制的に横送りされる苗載台8、プランタケース6の下方に上下揺動自在に設けられるフロート9などを備えて構成されている。
【0012】
植付作業機3は、走行機体1に対して左右傾斜自在に連結されている。例えば、本実施形態の乗用田植機では、植付部フレーム5の左右中央部から前方に向けてローリング軸10を突設すると共に、このローリング軸10を、昇降リンク機構2の後端部に連結される植付部ホルダ11で回動自在に支持することにより、植付作業機3を走行機体1に対して左右傾斜自在としている。
【0013】
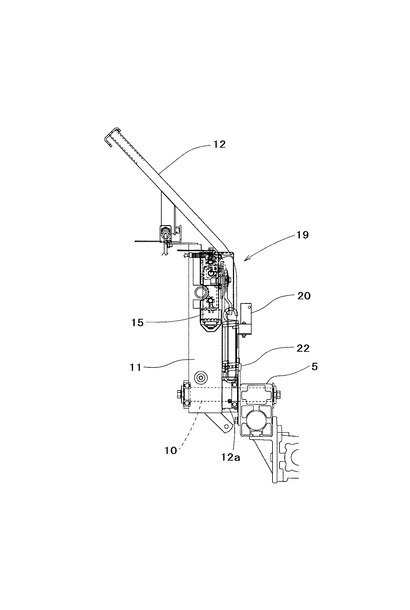
植付部ホルダ11と植付作業機3との間には、マスト12が介設されている。マスト12は、下端部に設けられるボス部12aがローリング軸10に対して回動自在に外嵌することにより、植付部ホルダ11及び植付作業機3に対する左右傾斜が許容されるようになっている。
【0014】
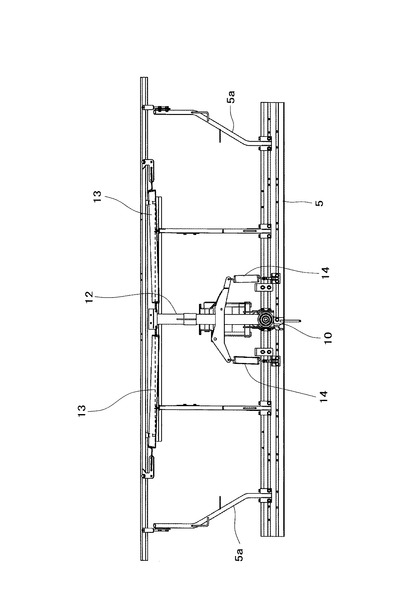
図2に示すように、マスト12の上端部と苗載台8の左右両端部との間には、左右一対の第一ローリング弾機13が介設されている。左右の第一ローリング弾機13は、苗載台8の横送りに伴って背反的に伸縮することにより、苗載台8の横送りに伴って発生する左右バランスの変化を相殺するようになっている。
【0015】
図2〜図4に示すように、マスト12の中間部と植付部フレーム5との間には、左右一対の第二ローリング弾機14が介設されている。左右の第二ローリング弾機14は、植付作業機3の全体荷重をバランスするように付勢力が設定されており、フロート9の浮力に基づく植付作業機3の従動的な左右傾斜、すなわち植付作業機3の従動的な田面追随作用を許容するようになっている。
【0016】
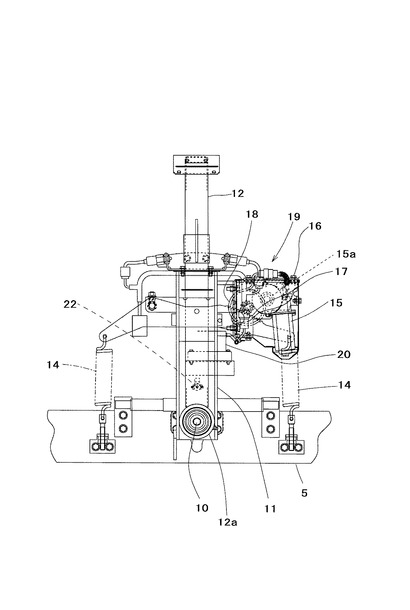
植付部ホルダ11の一側部には、減速機構付の電動モータからなる水平制御モータ(アクチュエータ)15がモータブラケット16を介して設けられている。水平制御モータ15の出力ギヤ15aは、マスト12に一体的に設けられる円弧状のラック17に対して中間ギヤ18を介して噛合されており、水平制御モータ15の駆動に応じてマスト12を強制的に左右傾斜させる。すなわち、植付部ホルダ11とマスト12との間には、水平制御モータ15の駆動に基づいて植付作業機3を強制的に左右傾斜させる強制傾斜機構19が構成されている。
【0017】
マスト12の背面部には、マスト12(植付作業機3)の絶対傾斜角(水平に対する傾斜角)を検出する傾斜角センサ20が設けられている。この傾斜角センサ20は、後述する水平制御を実行するためのセンサであり、その検出信号は制御部21に入力される。
【0018】
植付部ホルダ11とマスト12との間には、植付部ホルダ11(走行機体1)に対するマスト12(植付作業機3)の相対傾斜角(対機傾斜角)を検出する平行制御ポテンショメータ22が介設されている。この平行制御ポテンショメータ22は、後述する平行制御を実行するためのセンサであり、その検出信号は制御部21に入力される。
【0019】
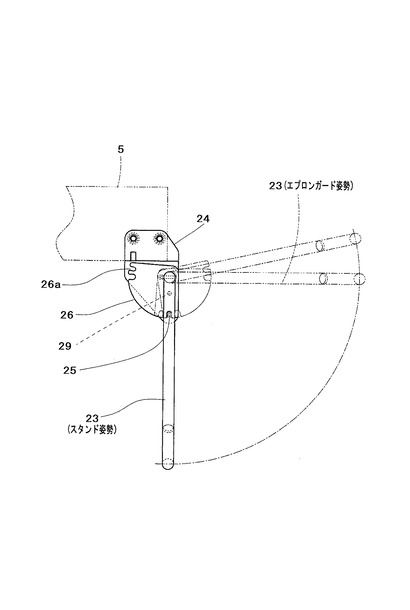
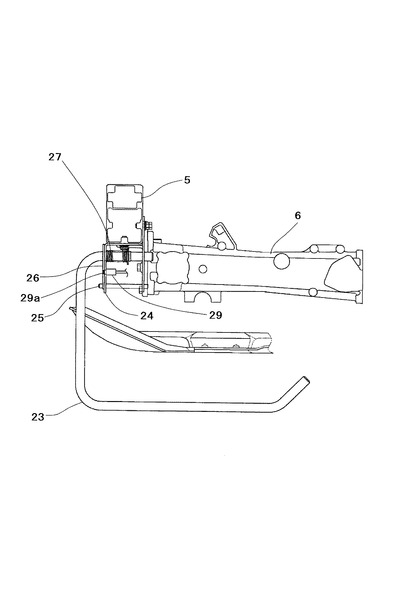
図1、図5及び図6に示すように、植付作業機3の左右両側部には、格納やメンテナンスに際して植付作業機3を非接地姿勢に保持するためのスタンド装置23が設けられる。スタンド装置23は、側面視コ字状に曲げ加工された棒状又はパイプ状の部材であり、スタンドブラケット24に貫通支持されたスタンド基部を支点とする上下回動により、後述するスタンド姿勢とエプロンガード姿勢(非スタンド姿勢)とに変姿自在に構成されている。
【0020】
スタンドブラケット24は、植付部フレーム5の左右両端部に設けられており、スタンド装置23を上下回動自在かつ前後摺動自在に支持すると共に、前方に突出するロックピン25を備えている。一方、スタンド装置23は、スタンドブラケット24の前面に当接するロックプレート26を一体的に備えると共に、スタンドブラケット24内に設けられる弾機27で後方に付勢されている。ロックプレート26の外周部には、ロックピン25に係合する溝26aが複数形成されており、この係合によりスタンド装置23の上下回動がロックされるようになっている。以下、スタンド装置23の使用例を示す。
【0021】
格納やメンテナンスに際して植付作業機3を地面に下ろす場合は、植付作業機3を上昇させた状態でスタンド装置23を前方に摺動させて、ロックプレート24とロックピン25との係合を解除しつつ、スタンド装置23を下方に回動させてスタンド姿勢(略垂直姿勢)とする。この姿勢でスタンド装置23から手を離すと、スタンド装置23が弾機27の付勢力で後方に摺動すると共に、スタンド姿勢に対応したロックプレート26の溝26aがロックピン25に係合することにより、スタンド装置23の上下回動がロックされる。その後、植付作業機3を下降させると、植付作業機3に先行して左右のスタンド装置23が接地し、植付作業機3が非接地姿勢に保持される。
【0022】
一方、植付作業を行う場合は、植付作業機3を上昇させた状態でスタンド装置23を前方に摺動させて、ロックプレート24とロックピン25との係合を解除しつつ、スタンド装置23を上方に回動させてエプロンガード姿勢(略水平姿勢)とする。この姿勢でスタンド装置23から手を離すと、スタンド装置23が弾機27の付勢力で後方に摺動すると共に、エプロンガード姿勢に対応したロックプレート26の溝26aがロックピン25に係合することにより、スタンド装置23の上下回動がロックされる。そして、エプロンガード姿勢のスタンド装置23は、苗載台8の下端部に沿って配置されるエプロン28の外端部よりも外側方に位置することにより、エプロン28の外端部を保護するエプロンガードに兼用される。
【0023】
スタンドブラケット24には、スタンド装置23のスタンド姿勢を検出するスタンド検出スイッチ(スタンド姿勢検出手段)29が設けられている。本実施形態のスタンド検出スイッチ29は、スイッチ部29aの出没を検出するスイッチであり、スタンドブラケット24の前面からスイッチ部29aが突出するように配置される。スタンド装置23がエプロンガード姿勢のときは、スイッチ部29aがロックプレート26によって没入位置に押し込まれているが、スタンド装置23がスタンド姿勢のときは、ロックプレート26に形成される孔又は切欠き内にスイッチ部29aが突出することにより、スタンド装置23のスタンド姿勢が検出される。そして、スタンド検出スイッチ29の検出信号は制御部21に入力される。
【0024】
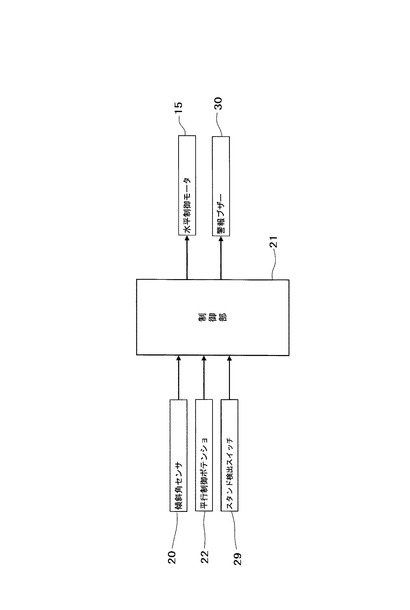
制御部21は、マイコンなどを用いて構成される制御ユニットであり、その入力側には、図7に示すように、前述した傾斜角センサ20、平行制御ポテンショメータ22及びスタンド検出スイッチ29が接続される一方、出力側には、前述した水平制御モータ15や警報音を出力する警報ブザー30が接続されている。
【0025】
制御部21は、特許請求の範囲に記載した水平制御手段や平行制御手段として動作するための制御プログラムを備える。水平制御は、傾斜角センサ20により検出される植付作業機3(マスト12)の絶対傾斜角が水平となるように水平制御モータ15を駆動させる制御であり、平行制御は、平行制御ポテンショメータ22により検出される植付作業機3(マスト12)の対機傾斜角が平行となるように水平制御モータ15を駆動させる制御である。以下、水平制御と平行制御の切り換え及びその作用について、図8及び図9を参照して説明する。
【0026】
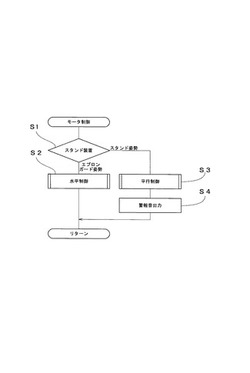
図8に示すように、制御部21が実行するモータ制御では、まず、スタンド検出スイッチ29の検出信号にもとづいてスタンド装置23の姿勢を判断する(S1)。ここで、スタンド装置23がエプロンガード姿勢であると判断した場合は、上述の水平制御を実行して植付作業機3を水平姿勢とする(S2)。これにより、植付作業時においては、走行機体1の左右傾斜にかかわらず、植付作業機3を水平面である田面に沿わせることができる。
【0027】
一方、スタンド装置23がスタンド姿勢であると判断した場合は、上述の平行制御を実行して植付作業機3を走行機体1に対して平行な姿勢とする(S3)。これにより、植付作業機3を地面に下ろす際には、図9の(C)に示すように、地面の左右傾斜にかかわらず、植付作業機3を地面に沿わせ、左右のスタンド装置23を略同時に着地させることができる。
【0028】
また、本実施形態では、スタンド装置23がスタンド姿勢であると判断した場合、警報ブザー30を駆動して警報音を出力するようになっている(S4)。これにより、作業者は、スタンド装置23がスタンド姿勢であることを認識できるので、スタンド装置23をエプロンガード姿勢とするのを忘れ、スタンド姿勢のまま植付作業を開始してしまうことを防止できる。
【0029】
叙述の如く構成された本実施形態によれば、走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備えるので、植付作業機3を地面に下ろす際には、地面の左右傾斜にかかわらず、植付作業機3を地面に沿って下ろすことができ、その結果、植付作業機3や強制傾斜機構19の破損を防止できるだけでなく、植付作業機3を地面から上昇させる際に、ローリング弾機13、14の蓄勢力で植付作業機3が大きく揺れることも防止できる。
【0030】
尚、本発明は、前記実施形態に限定されないものであることは勿論であって、特許請求の範囲内において変更や追加が可能であることは言うまでもない。例えば、前記実施形態では、ローリング弾機による植付作業機の従動的な左右傾斜を許容しているが、本発明は、このようなローリング弾機を備えない乗用移植機にも適用することができる。
【符号の説明】
【0031】
1 走行機体
3 植付作業機
15 水平制御モータ
19 強制傾斜機構
20 傾斜角センサ
21 制御部
22 平行制御ポテンショメータ
23 スタンド装置
29 スタンド検出スイッチ
【技術分野】
【0001】
本発明は、植付作業機を水平制御する乗用田植機などの乗用移植機に関する。
【背景技術】
【0002】
植付作業機の走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化可能に構成すると共に、植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段を備える乗用移植機が知られている(例えば、特許文献1参照)。このような乗用移植機では、走行機体の左右傾斜にかかわらず、植付作業機を水平姿勢(田面に対して平行な姿勢)に維持することができるので、良好な植付精度が得られる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−292608号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような乗用移植機では、格納やメンテナンスに際して植付作業機を地面に下ろすことがある。この場合、植付作業機を地面に直接下ろすと、破損のおそれがあるだけでなく、植付作業機の底部のメンテナンスが困難になるので、植付作業機を非接地姿勢に保持するスタンド装置が用いられる。スタンド装置としては、例えば、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機に設けられ、植付作業機を地面に下ろす際にスタンド姿勢とされるものが知られている。
【0005】
しかしながら、上述した水平制御手段を備える乗用移植機では、図9の(A)に示すように、植付作業機を傾斜した地面に下ろす場合、植付作業機が水平制御によって水平姿勢を維持し、地面に対して傾斜した姿勢で接地する可能性があるので、植付作業機や強制傾斜機構が破損するおそれがあった。
【0006】
尚、走行機体と植付作業機との間に、植付作業機の従動的な左右傾斜を許容するローリング弾機を介設した乗用移植機では、図9の(B)に示すように、水平制御状態であっても植付作業機を傾斜した地面に沿って接地させることが可能であるが、この場合には、傾斜角に応じた力がローリング弾機に蓄勢されるので、植付作業機を地面から上昇させる際、ローリング弾機の蓄勢力で植付作業機が大きく揺れるおそれがある。
【課題を解決するための手段】
【0007】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体の後部に昇降自在かつ左右傾斜自在に連結される植付作業機と、前記植付作業機の前記走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化させる強制傾斜機構と、前記植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で前記植付作業機に設けられ、前記植付作業機を地面に下ろす際にスタンド姿勢とされるスタンド装置と、を備える乗用移植機であって、前記スタンド装置の姿勢を検出するスタンド姿勢検出手段と、前記スタンド装置がスタンド姿勢のとき、前記植付作業機が前記走行機体に対して平行となるように前記アクチュエータを駆動制御する平行制御手段と、を備えることを特徴とする。
【発明の効果】
【0008】
請求項1の発明によれば、スタンド装置がスタンド姿勢のときは、植付作業機が走行機体に対して平行となるように制御されるので、植付作業機を傾斜した地面に下ろす場合であっても、植付作業機を傾斜した地面に沿って接地させることができ、その結果、植付作業機や強制傾斜機構の破損を防止できるだけでなく、植付作業機を地面から上昇させる際に植付作業機が大きく揺れることもない。
【図面の簡単な説明】
【0009】
【図1】乗用田植機の全体側面図である。
【図2】植付作業機の要部正面図である。
【図3】強制傾斜機構の正面図である。
【図4】強制傾斜機構の側面図である。
【図5】スタンド装置の正面図である。
【図6】スタンド装置の側面図である。
【図7】制御部の入出力を示すブロック図である。
【図8】モータ制御の制御手順を示すフローチャートである。
【図9】(A)は水平制御状態で植付作業機を地面に下ろした場合を示す乗用田植機の概略正面図、(B)は水平制御状態で植付作業機を地面に下ろし、ローリング弾機のバネ力に抗して植付作業機を地面に沿わせた場合を示す乗用田植機の概略正面図、(C)は平行制御状態(水平制御切り)で植付作業機を地面に下ろした場合を示す乗用田植機の概略正面図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は乗用田植機(乗用移植機)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。走行機体1と昇降リンク機構2との間には、リフトシリンダ4が介設されており、該リフトシリンダ4の油圧伸縮作動に伴って植付作業機3が昇降されるようになっている。
【0011】
図1及び図2に示すように、植付作業機3は、左右両側に苗載台支持ステー5aが立設される植付部フレーム5、該植付部フレーム5から後方に延出する複数のプランタケース6、該プランタケース6の後端部に設けられる植付機構7、植付部フレーム5に左右移動自在に支持され、植付機構7の動作に合わせて強制的に横送りされる苗載台8、プランタケース6の下方に上下揺動自在に設けられるフロート9などを備えて構成されている。
【0012】
植付作業機3は、走行機体1に対して左右傾斜自在に連結されている。例えば、本実施形態の乗用田植機では、植付部フレーム5の左右中央部から前方に向けてローリング軸10を突設すると共に、このローリング軸10を、昇降リンク機構2の後端部に連結される植付部ホルダ11で回動自在に支持することにより、植付作業機3を走行機体1に対して左右傾斜自在としている。
【0013】
植付部ホルダ11と植付作業機3との間には、マスト12が介設されている。マスト12は、下端部に設けられるボス部12aがローリング軸10に対して回動自在に外嵌することにより、植付部ホルダ11及び植付作業機3に対する左右傾斜が許容されるようになっている。
【0014】
図2に示すように、マスト12の上端部と苗載台8の左右両端部との間には、左右一対の第一ローリング弾機13が介設されている。左右の第一ローリング弾機13は、苗載台8の横送りに伴って背反的に伸縮することにより、苗載台8の横送りに伴って発生する左右バランスの変化を相殺するようになっている。
【0015】
図2〜図4に示すように、マスト12の中間部と植付部フレーム5との間には、左右一対の第二ローリング弾機14が介設されている。左右の第二ローリング弾機14は、植付作業機3の全体荷重をバランスするように付勢力が設定されており、フロート9の浮力に基づく植付作業機3の従動的な左右傾斜、すなわち植付作業機3の従動的な田面追随作用を許容するようになっている。
【0016】
植付部ホルダ11の一側部には、減速機構付の電動モータからなる水平制御モータ(アクチュエータ)15がモータブラケット16を介して設けられている。水平制御モータ15の出力ギヤ15aは、マスト12に一体的に設けられる円弧状のラック17に対して中間ギヤ18を介して噛合されており、水平制御モータ15の駆動に応じてマスト12を強制的に左右傾斜させる。すなわち、植付部ホルダ11とマスト12との間には、水平制御モータ15の駆動に基づいて植付作業機3を強制的に左右傾斜させる強制傾斜機構19が構成されている。
【0017】
マスト12の背面部には、マスト12(植付作業機3)の絶対傾斜角(水平に対する傾斜角)を検出する傾斜角センサ20が設けられている。この傾斜角センサ20は、後述する水平制御を実行するためのセンサであり、その検出信号は制御部21に入力される。
【0018】
植付部ホルダ11とマスト12との間には、植付部ホルダ11(走行機体1)に対するマスト12(植付作業機3)の相対傾斜角(対機傾斜角)を検出する平行制御ポテンショメータ22が介設されている。この平行制御ポテンショメータ22は、後述する平行制御を実行するためのセンサであり、その検出信号は制御部21に入力される。
【0019】
図1、図5及び図6に示すように、植付作業機3の左右両側部には、格納やメンテナンスに際して植付作業機3を非接地姿勢に保持するためのスタンド装置23が設けられる。スタンド装置23は、側面視コ字状に曲げ加工された棒状又はパイプ状の部材であり、スタンドブラケット24に貫通支持されたスタンド基部を支点とする上下回動により、後述するスタンド姿勢とエプロンガード姿勢(非スタンド姿勢)とに変姿自在に構成されている。
【0020】
スタンドブラケット24は、植付部フレーム5の左右両端部に設けられており、スタンド装置23を上下回動自在かつ前後摺動自在に支持すると共に、前方に突出するロックピン25を備えている。一方、スタンド装置23は、スタンドブラケット24の前面に当接するロックプレート26を一体的に備えると共に、スタンドブラケット24内に設けられる弾機27で後方に付勢されている。ロックプレート26の外周部には、ロックピン25に係合する溝26aが複数形成されており、この係合によりスタンド装置23の上下回動がロックされるようになっている。以下、スタンド装置23の使用例を示す。
【0021】
格納やメンテナンスに際して植付作業機3を地面に下ろす場合は、植付作業機3を上昇させた状態でスタンド装置23を前方に摺動させて、ロックプレート24とロックピン25との係合を解除しつつ、スタンド装置23を下方に回動させてスタンド姿勢(略垂直姿勢)とする。この姿勢でスタンド装置23から手を離すと、スタンド装置23が弾機27の付勢力で後方に摺動すると共に、スタンド姿勢に対応したロックプレート26の溝26aがロックピン25に係合することにより、スタンド装置23の上下回動がロックされる。その後、植付作業機3を下降させると、植付作業機3に先行して左右のスタンド装置23が接地し、植付作業機3が非接地姿勢に保持される。
【0022】
一方、植付作業を行う場合は、植付作業機3を上昇させた状態でスタンド装置23を前方に摺動させて、ロックプレート24とロックピン25との係合を解除しつつ、スタンド装置23を上方に回動させてエプロンガード姿勢(略水平姿勢)とする。この姿勢でスタンド装置23から手を離すと、スタンド装置23が弾機27の付勢力で後方に摺動すると共に、エプロンガード姿勢に対応したロックプレート26の溝26aがロックピン25に係合することにより、スタンド装置23の上下回動がロックされる。そして、エプロンガード姿勢のスタンド装置23は、苗載台8の下端部に沿って配置されるエプロン28の外端部よりも外側方に位置することにより、エプロン28の外端部を保護するエプロンガードに兼用される。
【0023】
スタンドブラケット24には、スタンド装置23のスタンド姿勢を検出するスタンド検出スイッチ(スタンド姿勢検出手段)29が設けられている。本実施形態のスタンド検出スイッチ29は、スイッチ部29aの出没を検出するスイッチであり、スタンドブラケット24の前面からスイッチ部29aが突出するように配置される。スタンド装置23がエプロンガード姿勢のときは、スイッチ部29aがロックプレート26によって没入位置に押し込まれているが、スタンド装置23がスタンド姿勢のときは、ロックプレート26に形成される孔又は切欠き内にスイッチ部29aが突出することにより、スタンド装置23のスタンド姿勢が検出される。そして、スタンド検出スイッチ29の検出信号は制御部21に入力される。
【0024】
制御部21は、マイコンなどを用いて構成される制御ユニットであり、その入力側には、図7に示すように、前述した傾斜角センサ20、平行制御ポテンショメータ22及びスタンド検出スイッチ29が接続される一方、出力側には、前述した水平制御モータ15や警報音を出力する警報ブザー30が接続されている。
【0025】
制御部21は、特許請求の範囲に記載した水平制御手段や平行制御手段として動作するための制御プログラムを備える。水平制御は、傾斜角センサ20により検出される植付作業機3(マスト12)の絶対傾斜角が水平となるように水平制御モータ15を駆動させる制御であり、平行制御は、平行制御ポテンショメータ22により検出される植付作業機3(マスト12)の対機傾斜角が平行となるように水平制御モータ15を駆動させる制御である。以下、水平制御と平行制御の切り換え及びその作用について、図8及び図9を参照して説明する。
【0026】
図8に示すように、制御部21が実行するモータ制御では、まず、スタンド検出スイッチ29の検出信号にもとづいてスタンド装置23の姿勢を判断する(S1)。ここで、スタンド装置23がエプロンガード姿勢であると判断した場合は、上述の水平制御を実行して植付作業機3を水平姿勢とする(S2)。これにより、植付作業時においては、走行機体1の左右傾斜にかかわらず、植付作業機3を水平面である田面に沿わせることができる。
【0027】
一方、スタンド装置23がスタンド姿勢であると判断した場合は、上述の平行制御を実行して植付作業機3を走行機体1に対して平行な姿勢とする(S3)。これにより、植付作業機3を地面に下ろす際には、図9の(C)に示すように、地面の左右傾斜にかかわらず、植付作業機3を地面に沿わせ、左右のスタンド装置23を略同時に着地させることができる。
【0028】
また、本実施形態では、スタンド装置23がスタンド姿勢であると判断した場合、警報ブザー30を駆動して警報音を出力するようになっている(S4)。これにより、作業者は、スタンド装置23がスタンド姿勢であることを認識できるので、スタンド装置23をエプロンガード姿勢とするのを忘れ、スタンド姿勢のまま植付作業を開始してしまうことを防止できる。
【0029】
叙述の如く構成された本実施形態によれば、走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備えるので、植付作業機3を地面に下ろす際には、地面の左右傾斜にかかわらず、植付作業機3を地面に沿って下ろすことができ、その結果、植付作業機3や強制傾斜機構19の破損を防止できるだけでなく、植付作業機3を地面から上昇させる際に、ローリング弾機13、14の蓄勢力で植付作業機3が大きく揺れることも防止できる。
【0030】
尚、本発明は、前記実施形態に限定されないものであることは勿論であって、特許請求の範囲内において変更や追加が可能であることは言うまでもない。例えば、前記実施形態では、ローリング弾機による植付作業機の従動的な左右傾斜を許容しているが、本発明は、このようなローリング弾機を備えない乗用移植機にも適用することができる。
【符号の説明】
【0031】
1 走行機体
3 植付作業機
15 水平制御モータ
19 強制傾斜機構
20 傾斜角センサ
21 制御部
22 平行制御ポテンショメータ
23 スタンド装置
29 スタンド検出スイッチ
【特許請求の範囲】
【請求項1】
走行機体の後部に昇降自在かつ左右傾斜自在に連結される植付作業機と、
前記植付作業機の前記走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化させる強制傾斜機構と、
前記植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段と、
スタンド姿勢と非スタンド姿勢とに変姿可能な状態で前記植付作業機に設けられ、前記植付作業機を地面に下ろす際にスタンド姿勢とされるスタンド装置と、を備える乗用移植機であって、
前記スタンド装置の姿勢を検出するスタンド姿勢検出手段と、
前記スタンド装置がスタンド姿勢のとき、前記植付作業機が前記走行機体に対して平行となるように前記アクチュエータを駆動制御する平行制御手段と、を備えることを特徴とする乗用移植機。
【請求項1】
走行機体の後部に昇降自在かつ左右傾斜自在に連結される植付作業機と、
前記植付作業機の前記走行機体に対する左右傾斜姿勢をアクチュエータの動力で強制的に変化させる強制傾斜機構と、
前記植付作業機が水平姿勢を維持するように前記アクチュエータを駆動制御する水平制御手段と、
スタンド姿勢と非スタンド姿勢とに変姿可能な状態で前記植付作業機に設けられ、前記植付作業機を地面に下ろす際にスタンド姿勢とされるスタンド装置と、を備える乗用移植機であって、
前記スタンド装置の姿勢を検出するスタンド姿勢検出手段と、
前記スタンド装置がスタンド姿勢のとき、前記植付作業機が前記走行機体に対して平行となるように前記アクチュエータを駆動制御する平行制御手段と、を備えることを特徴とする乗用移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−66426(P2013−66426A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−207396(P2011−207396)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]