
乗用移植機
【課題】整地装置を速やかに接地させて整地作業を開始すると共に、整地ロータが非回転状態で接地して圃場面を荒らすことを防止する。
【解決手段】整地装置22の昇降範囲に、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置と、を設定し、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置22を作業位置とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行う。
【解決手段】整地装置22の昇降範囲に、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置と、を設定し、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置22を作業位置とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、植付作業機の前方に整地装置を備える乗用田植機などの乗用移植機に関する。
【背景技術】
【0002】
植付作業機の前方に整地装置を備える乗用移植機が知られている。例えば、特許文献1には、整地装置を圃場面に接地する作業位置と、圃場面の上方に位置する退避位置とに亘って昇降自在に構成し、植付作業機が下降し、かつ走行機体が設定距離だけ前進すると、整地装置を退避位置から作業位置に下降させる乗用移植機が示されている。このような乗用移植機によれば、植付作業機を下降させる際、植付作業機よりも先に整地装置が接地することがなく、整地装置の破損などが防止されるという利点がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−207434号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示される乗用移植機では、植付作業機が下降し、かつ走行機体が設定距離だけ前進したタイミングで、整地装置を退避位置から作業位置に下降させるので、整地装置の接地に時間がかかり、整地作業の開始が遅れる惧れがある。
【0005】
また、特許文献1に示される乗用移植機では、植付作業機から取り出した動力で整地装置の整地ロータを回転駆動させているので、植付開始前に整地装置が作業位置に下降した場合、整地ロータが非回転状態で接地して圃場面を荒らす惧れがある。
【課題を解決するための手段】
【0006】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体の後部に昇降自在に連結される植付作業機と、前記植付作業機の前方に昇降自在に配置され、整地ロータの回転駆動により圃場面を整地する整地装置と、前記植付作業機及び前記整地装置を昇降制御する制御装置と、を備える乗用移植機であって、前記植付作業機の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で前記整地ロータを回転駆動させると共に、前記整地装置の昇降範囲に、前記整地ロータを接地させて圃場面を整地する作業位置と、前記整地ロータを圃場面から上方に退避させる格納位置と、前記整地ロータを作業位置と格納位置との間で待機させる準備位置と、を設定し、前記植付作業機が上昇状態のときは、前記整地装置を格納位置とし、前記植付作業機が下降状態で、かつ、前記走行機体が走行停止状態のときは、前記整地装置を準備位置とし、前記植付作業機が下降状態で、かつ、前記走行機体が走行状態のときは、前記整地装置を作業位置とし、準備位置から作業位置への下降に際しては、前記整地ロータを回転駆動させながら前記整地装置の下降動作を行うことを特徴とする。
【発明の効果】
【0007】
請求項1の発明によれば、植付作業機が上昇状態のとき整地装置を格納位置に退避させると共に、植付作業機が下降した後、所定のタイミングで整地装置を作業位置に下降させるものでありながら、植付作業機の下降に際して整地装置を格納位置よりも下方の準備位置に待機させ、その後、走行開始に応じて整地装置を準備位置から作業位置に下降させるので、走行開始に応じて整地装置を格納位置から作業位置に下降させる場合に比べ、整地装置を速やかに接地させて整地作業を開始することができる。しかも、準備位置から作業位置への下降に際しては、整地ロータを回転駆動させながら整地装置の下降動作を行うので、整地ロータが非回転状態で接地して圃場面を荒らすことも防止できる。
【図面の簡単な説明】
【0008】
【図1】乗用田植機の全体側面図である。
【図2】操作パネルの正面図である。
【図3】植付深さ調節を示す要部側面図である。
【図4】整地装置の背面斜視図である。
【図5】植付深さ調節に連動した整地ロータの昇降動作を示す要部側面図である。
【図6】整地ロータの昇降位置を示す要部側面図である。
【図7】整地ロータの昇降駆動機構を示す拡大斜視図である。
【図8】制御部の入出力を示すブロック図である。
【図9】作業機操作制御の制御手順を示すフローチャートである。
【図10】整地クラッチ制御の制御手順を示すフローチャートである。
【図11】整地装置高さ制御の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
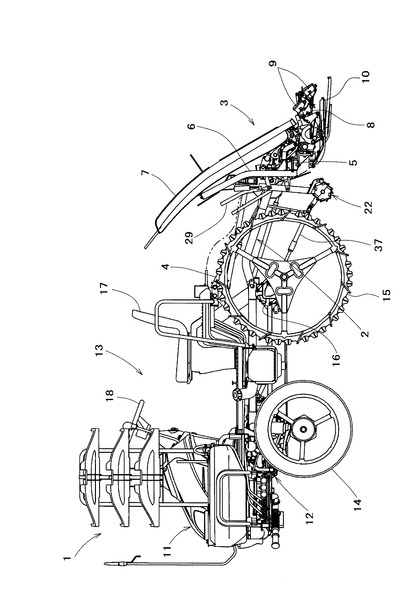
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は乗用田植機(乗用移植機)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。植付作業機3は、下降接地状態で植付作業を行うように構成されており、走行機体1と昇降リンク機構2との間に介設される作業機昇降用油圧シリンダ4の伸縮に応じて昇降するようになっている。
【0010】
植付作業機3は、昇降リンク機構2に対して左右傾斜自在に連結される作業機フレーム5と、作業機フレーム5に立設される左右一対の苗載台支持ステー6と、苗載台支持ステー6に左右往復移動自在に支持される苗載台7と、作業機フレーム5から後方に延出する複数のプランタケース8と、プランタケース8の後端部に設けられる植付機構9と、田面を滑走するフロート10とを備えて構成されている。
【0011】
走行機体1は、エンジン(図示せず)が搭載されるエンジン搭載部11と、エンジン動力を変速するミッションケース12と、オペレータが乗車する操作部13と、操舵輪及び駆動輪を兼ねる前輪14と、駆動輪である後輪15とを備える乗用型の四輪車両である。
【0012】
ミッションケース12内には、入力軸、植付伝動軸、走行伝動軸などの伝動軸が設けられている。エンジンから入力軸に入力された動力は、株間変速機構を介して植付伝動軸に伝動されると共に、トルクリミッタ及び植付クラッチを介して、植付伝動軸から植付PTO軸に伝動される。そして、植付PTO軸から取り出される動力は、ミッションケース12外の伝動機構を経由して植付作業機3に伝動される。
【0013】
また、エンジンから入力軸に入力された動力は、副変速機構を介して走行伝動軸に伝動される。走行伝動軸に伝動された動力は、前輪差動機構を介して左右の前輪駆動軸に伝動されると共に、走行PTO軸に伝動される。そして、走行PTO軸から取り出される動力は、ミッションケース12外の伝動機構を経由してリヤアクスルケース16に伝動される。
【0014】
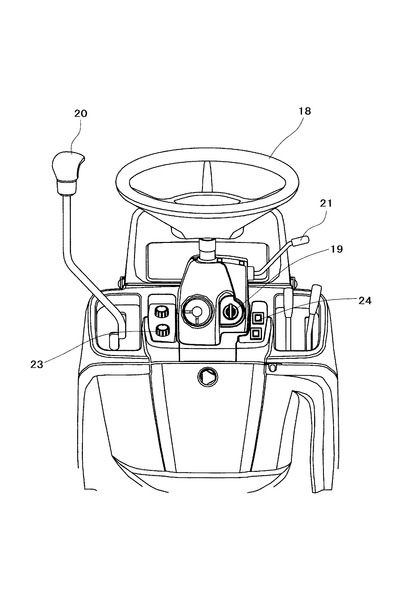
図1及び図2に示すように、操作部13には、オペレータが座る運転座席17、前輪14を操舵するステアリングハンドル18と、主電源スイッチ及びエンジン始動操作具を兼ねるキースイッチ19と、走行変速操作を行う主変速レバー20と、植付作業機3の昇降操作や植付クラッチの断続操作を行う植付作業機操作具21と、後述する整地装置22の格納操作及び作業高さ調節を行う整地装置操作具23と、植付作業モード(ON状態:苗切れ警報制御や作業機水平制御をONにするモード)と非植付作業モード(OFF状態:苗切れ警報制御や作業機水平制御をOFFにするモード)との切り換えを行う作業準備スイッチ24が設けられている。
【0015】
本実施形態の植付作業機操作具21は、上方操作及び下方操作が可能なレバー式操作具であり、後述する所定の操作にもとづいて、植付作業機3の昇降動作状態を「上昇」、「固定」、「自動昇降(下降)」の3つに切換えると共に、植付クラッチの状態を「入り」と「切り」に切り換えることができる。そして、「上昇」状態では、植付作業機3が上昇動作し、「固定」状態では、植付作業機3の昇降が停止し、「自動昇降(下降)」状態では、植付作業機3が下降動作すると共に、接地後は自動昇降動作に移行するようになっている。
【0016】
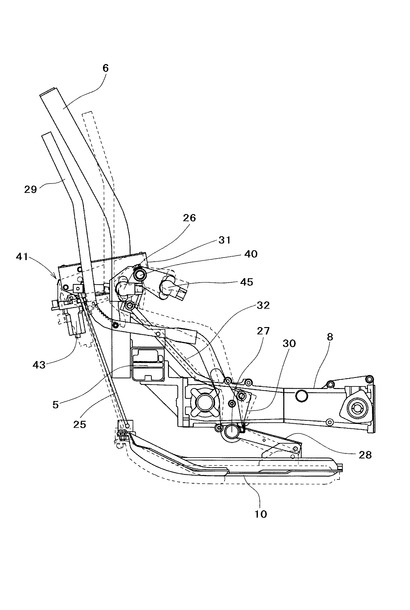
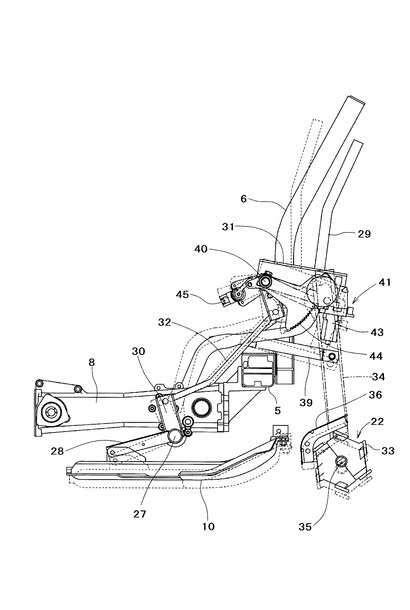
自動昇降動作は、植付作業機3に対するフロート10の上下位置に応じて植付作業機3を自動的に昇降させる動作である。本実施形態では、図3に示すように、フロート10の前端部にリンク25を介してフロートポテンショメータ26を連結しており、このフロートポテンショメータ26でフロート10の上下位置を検出すると共に、該検出値が所定値を維持するように植付作業機3を自動的に昇降させることにより、苗の植付深さを一定に保つようになっている。
【0017】
植付作業機3の底部には、左右方向に沿ってフロート支持軸27が配置されている。フロート支持軸27には、後下方に延出するフロート支持アーム28が一体的に設けられており、該フロート支持アーム28の先端部にフロート10の後端側が上下揺動自在に連結支持されている。
【0018】
さらに、フロート支持軸27には、苗の植付深さを調節するための植付深さ調節レバー29や、植付深さ調節レバー29の操作に応じてフロートポテンショメータ26の位置を変更するための連動アーム30が一体的に連結されている。尚、本実施形態の苗深さ調節は、植付作業機3に対するフロート10の上下位置を変更することにより行われ、フロート10の揺動支点及びフロートポテンショメータ26との連結点を同時に上下方向に変動させる必要がある。
【0019】
植付深さ調節レバー29は、植付作業機3の前面部から前上方に延出しており、植付作業機3を上昇させれば、運転座席17に座った姿勢で操作できるようになっている。そして、植付深さ調節レバー29を前後方向に操作すると、フロート支持軸27が軸心回りに回動するのに伴い、フロート支持アーム28がフロート支持軸27を支点として上下回動し、フロート10の揺動支点位置を上下方向に変動させる。
【0020】
一方、連動アーム30は、フロートポテンショメータ26が設けられる上下回動自在なベース部材31にロッド32を介して連結され、植付深さ調節レバー29の操作に応じてベース部材31を上下回動させる。ベース部材31が上下回動すると、フロートポテンショメータ26が上下方向に変動し、リンク25を介して連結されるフロート10の前端部を上下方向に変動させる。
【0021】
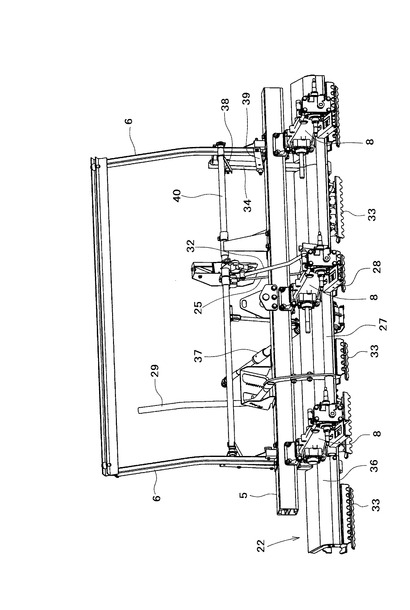
図1、図4及び図5に示すように、植付作業機3の前方には、整地ロータ33の回転駆動により圃場面を整地する整地装置22が設けられている。整地装置22は、植付作業機3の前面部に設けられる整地フレーム34と、該整地フレーム34の下端部に回転自在に支持されるロータ軸35と、該ロータ軸35に一体的に設けられる上記の整地ロータ33と、整地ロータ33の上方を覆うロータカバー36と、ロータ軸35に回転動力を伝動する整地動力伝動機構37とを備えて構成されている。
【0022】
整地動力伝動機構37は、リヤアクスルケース16から走行系の動力を取り出してロータ軸35に伝動するように構成されている。つまり、リヤアクスルケース16から取り出される走行系の動力は、前述したように、植付作業機3の動力を断続する植付クラッチよりも伝動上流側から取り出した動力であるから、植付クラッチの入り切りにかかわらず整地ロータ33を回転駆動させることができる。また、整地動力伝動機構37は、その伝動経路中に整地クラッチ(図示せず)を備えており、該整地クラッチの操作や制御にもとづいてロータ軸35への動力伝動を入り切りすることができるようになっている。
【0023】
図1、図4及び図5に示すように、整地フレーム34は、平行リンク機構を構成する上リンク38及び下リンク39を介して苗載台支持ステー6に上下昇降自在に連結支持されている。上リンク38の基部は、苗載台支持ステー6に左右方向を向いて架設される整地装置支持軸40に対して一体的に連結されており、整地装置支持軸40の軸心回りの回動に応じて上リンク38が上下に回動することにより、整地装置22が昇降するようになっている。
【0024】
前述したベース部材31は、整地装置支持軸40の中央部に回動自在に支持されると共に、後述する整地昇降駆動機構41を介して整地装置支持軸40に連結されている。つまり、ベース部材31が前述した植付深さ調節レバー29の操作に応じて上下回動した場合、ベース部材31の上下回動に応じて整地装置22の昇降位置も変動される。これにより、植付深さ調節に応じて整地装置22の作業高さが変動してしまうという不都合を解消することができる。
【0025】
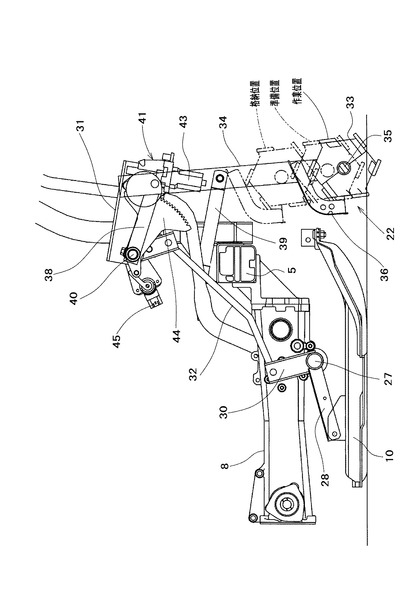
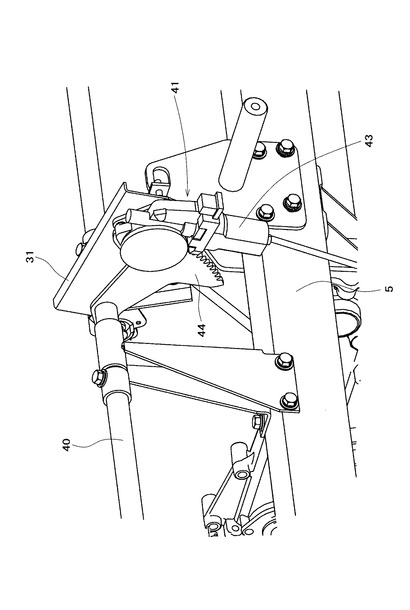
図5〜図7に示すように、整地昇降駆動機構41は、ベース部材31に設けられる整地装置昇降モータ(減速機構付き電動モータ)43と、整地装置支持軸40に設けられるセクタギヤ44と、ベース部材31に対するセクタギヤ44の相対的な回動角を検出する整地装置ポテンショメータ45とを備えて構成されている。整地装置昇降モータ43を駆動させると、その出力ギヤ(図示せず)に噛合するセクタギヤ44が整地装置支持軸40を回動させ、それに応じて整地装置22が昇降するようになっている。
【0026】
図6に示すように、整地装置22の昇降範囲には、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置とがあらかじめ設定されている。尚、作業位置は、前述した整地装置操作具23の操作によって「浅」、「中」、「深」の三段階または無段階に調節することができるようになっている。
【0027】
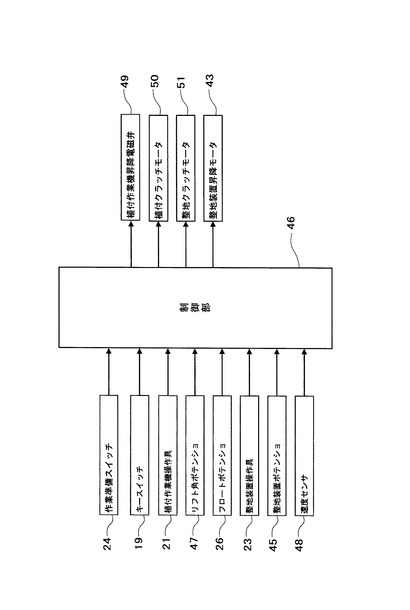
図8に示すように、走行機体1には、マイコンなどを用いて構成される制御部(制御装置)46が設けられている。制御部46の入力側には、前述したキースイッチ19、植付作業機操作具21、整地装置操作具23、作業準備スイッチ24、フロートポテンショメータ26及び整地装置ポテンショメータ45に加え、植付作業機3の昇降位置を検出するリフト角ポテンショメータ47と、走行機体1の走行速度を検出する速度センサ48が接続されている。
【0028】
また、制御部46の出力側には、前述した整地装置昇降モータ43に加え、作業機昇降用油圧シリンダ4を伸縮動作させる植付作業機昇降電磁弁49と、植付クラッチを入り切りさせる植付クラッチモータ50と、整地クラッチを入り切りさせる整地クラッチモータ51が接続されている。
【0029】
制御部46は、植付作業機3を昇降や植付クラッチの入り切りを制御する作業機操作制御と、整地クラッチの入り切りを制御する整地クラッチ制御と、整地装置22の昇降を制御する整地装置高さ制御を実行するようになっている。以下、作業機操作制御、整地クラッチ制御及び整地装置高さ制御の制御手順について、図9〜図11を参照して説明する。
【0030】
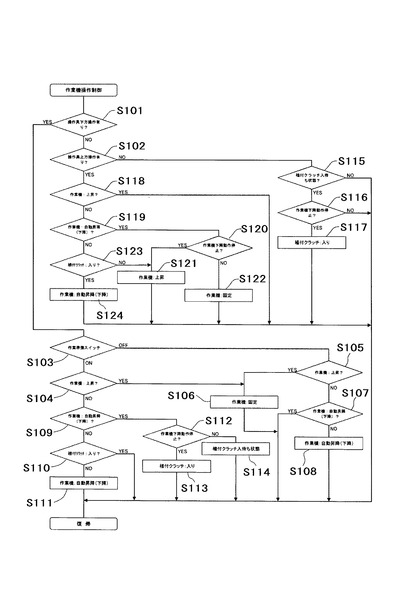
図9に示すように、作業機操作制御では、まず、植付作業機操作具21の下方操作や上方操作の有無を判断する(S101、S102)。ここで、植付作業機操作具21の下方操作があった場合は、作業準備スイッチ24のON/OFFを判断すると共に(S103)、該判断結果に拘わらず植付作業機3の昇降動作状態が「上昇」状態であるか否かを判断する(S104、S105)。そして、この判断結果がYESである場合は、植付作業機3の昇降動作状態を「固定」状態とする(S106)。つまり、植付作業機3の上昇動作中に植付作業機操作具21を下方操作すると、植付作業機3の上昇動作が停止される。
【0031】
作業準備スイッチ24がOFFで、かつ、植付作業機3が昇降動作状態が「上昇」状態ではない場合は、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S107)。そして、この判断結果がYESの場合は、そのまま上位ルーチンに復帰するが、判断結果がNOの場合は、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S108)。つまり、植付作業機3の昇降動作状態が「固定」状態のときに植付作業機操作具21を下方操作すると、作業準備スイッチ24がOFFの場合は、植付クラッチの入り切り状態に拘わらず植付作業機3が下降動作される。
【0032】
一方、作業準備スイッチ24がONで、かつ、植付作業機3が昇降動作状態が「上昇」状態ではない場合も、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S109)。そして、この判断結果がNOの場合は、植付クラッチが入り状態であるか否かを判断し(S110)、この判断結果がNOの場合にのみ、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S111)。つまり、植付作業機3の昇降動作状態が「固定」状態のときに植付作業機操作具21を下方操作すると、作業準備スイッチ24がONの場合は、植付クラッチが切り状態のときのみ植付作業機3が下降動作される。
【0033】
また、ステップS109の判断結果がYESの場合は、植付作業機3の接地、すなわち自動昇降動作による下降停止を判断し(S112)、この判断結果がYESの場合は、植付クラッチを入りとし(S113)、判断結果がNOの場合は、植付クラッチ入り待ち状態とする(S114)。つまり、植付作業機3が接地した状態で植付作業機操作具21を下方操作すると、植付クラッチが入りとなって苗の植付けが開始される。また、植付作業機3が接地する前に植付作業機操作具21を下方操作すると、植付クラッチ入り待ち状態となり、接地後に植付クラッチが入りとされる(S115〜S117)。
【0034】
一方、植付作業機操作具21の上方操作があった場合は、植付作業機3の昇降動作状態が「上昇」状態であるか否かを判断し(S118)、この判断結果がYESの場合は、そのまま上位ルーチンに復帰するが、判断結果がNOの場合は、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S119)。この判断結果がYESの場合は、植付作業機3の接地、すなわち自動昇降動作による下降停止を判断し(S120)、この判断結果がYESの場合は、植付作業機3の昇降動作状態を「上昇」状態とし(S121)、判断結果がNOの場合は、植付作業機3の昇降動作状態を「固定」状態とする(S122)。つまり、植付作業機3が接地した状態で植付作業機操作具21を上方操作すると、植付作業機3が上昇動作され、植付作業機3の下降動作中に植付作業機操作具21を上方操作すると、植付作業機3の下降動作が停止される。
【0035】
また、ステップS119の判断結果がNOの場合は、植付クラッチが入り状態であるか否かを判断し(S123)、この判断結果がNOの場合は、植付作業機3の昇降動作状態を「上昇」状態とし(S121)、判断結果がYESの場合は、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S124)。つまり、植付作業機3の昇降動作状態が「固定」のときに植付作業機操作具21を上方操作すると、植付クラッチが切りの場合は、植付作業機3が上昇動作されるが、植付クラッチが入りのときは、植付作業機3が下降動作される。
【0036】
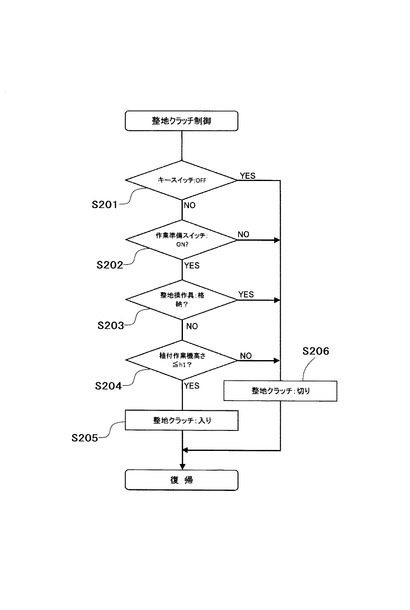
図10に示すように、整地クラッチ制御では、整地クラッチを入りにする4つの条件を判断し(S201〜S204)、これらの条件をすべて満たす場合にのみ整地クラッチを入りとする一方(S205)、それ以外の場合は整地クラッチを入りとする(S206)。整地クラッチを入りにする4つの条件は、キースイッチ19がOFFではないこと(S201)、作業準備スイッチ24がONであること(S202)、整地装置操作具23が格納位置以外であること(S203)、植付作業機3の昇降高さが所定の高さh1(非接地高さ)以下であること(S204)、であり、整地クラッチを入りにすると、植付クラッチの入り切りに拘わらず整地装置22の整地ロータ33を回転駆動させることが可能であり、植付作業機3の下降時には、植付作業機3が接地する前、すなわち植付作業機3の昇降高さが所定の高さh1以下となった時点で整地クラッチが入りとなり、整地ロータ33の回転駆動が開始される。尚、本発明においては、整地クラッチや整地クラッチ制御の有無は任意である。例えば、機体走行時に整地ロータ33を常に回転駆動させるものであっても本発明に含まれる。
【0037】
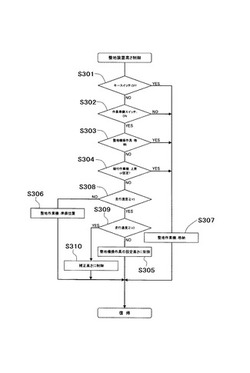
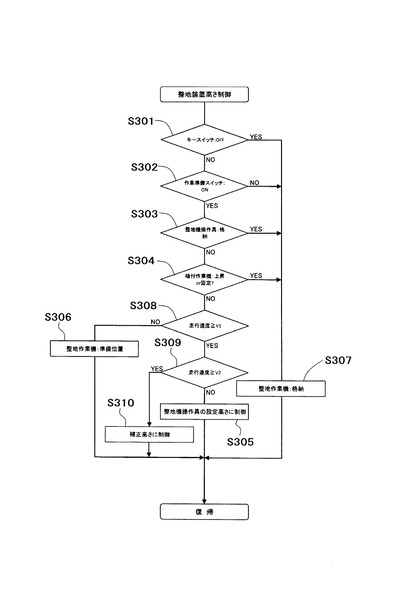
図11に示すように、整地装置高さ制御では、まず、4つの条件を判断し(S301〜S304)、これらの条件をすべて満たす場合にのみ整地装置22を作業位置(または準備位置)とする一方(S305、S306)、それ以外の場合は整地装置22を格納位置とする(S307)。整地装置22を作業位置(または準備位置)にする4つの条件は、キースイッチ19がOFFではないこと(S301)、作業準備スイッチ24がONであること(S302)、整地装置操作具23が格納位置以外であること(S303)、植付作業機3の昇降動作状態が「上昇」、「固定」以外であること(S304)、である。
【0038】
上記の条件を満たす場合は、次いで走行機体1の走行速度を判断する(S308、S309)。そして、走行機体1の走行速度がV1(走行/停止判定用速度)に満たない場合は、整地装置22を準備位置とする(S306)。また、走行機体1の走行速度がV1以上で、かつ、V2(高速植付/中低速植付判定用速度)に満たない場合は、整地装置22を整地装置操作具23で設定された作業位置とする(S305)。また、走行機体1の走行速度がV2以上の場合、すなわち高速植付の場合は、整地装置22を整地装置操作具23で設定された作業位置よりも上方に補正された補正作業位置とし(S310)、整地装置22による水押しや、水押しに伴う隣接植付苗の倒れを低減させる。
【0039】
そして、上記のような整地クラッチ制御や整地装置高さ制御によれば、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置を作業位置(または補正作業位置)とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うことが可能になる。
【0040】
叙述の如く構成された本実施形態によれば、走行機体1の後部に昇降自在に連結される植付作業機3と、植付作業機3の前方に昇降自在に配置され、整地ロータ33の回転駆動により圃場面を整地する整地装置22と、植付作業機3及び整地装置22を昇降制御する制御部46と、を備える乗用田植機であって、植付作業機3の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で整地ロータ33を回転駆動させると共に、整地装置22の昇降範囲に、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置と、を設定し、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置22を作業位置とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うので、植付作業機3が上昇状態のとき整地装置22を格納位置に退避させると共に、植付作業機3が下降した後、所定のタイミングで整地装置22を作業位置に下降させるものでありながら、植付作業機3の下降に際して整地装置22を格納位置よりも下方の準備位置に待機させ、その後、走行開始に応じて整地装置22を準備位置から作業位置に下降させるので、走行開始に応じて整地装置22を格納位置から作業位置に下降させる場合に比べ、整地装置22を速やかに接地させて整地作業を開始することができる。しかも、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うので、整地ロータ33が非回転状態で接地して圃場面を荒らすことも防止できる。
【符号の説明】
【0041】
1 走行機体
3 植付作業機
21 植付作業機操作具
22 整地装置
23 整地装置操作具
33 整地ロータ
43 整地装置昇降モータ
46 制御部
47 リフト角ポテンショメータ
48 速度センサ
49 植付作業機昇降電磁弁
50 植付クラッチモータ
51 整地クラッチモータ
【技術分野】
【0001】
本発明は、植付作業機の前方に整地装置を備える乗用田植機などの乗用移植機に関する。
【背景技術】
【0002】
植付作業機の前方に整地装置を備える乗用移植機が知られている。例えば、特許文献1には、整地装置を圃場面に接地する作業位置と、圃場面の上方に位置する退避位置とに亘って昇降自在に構成し、植付作業機が下降し、かつ走行機体が設定距離だけ前進すると、整地装置を退避位置から作業位置に下降させる乗用移植機が示されている。このような乗用移植機によれば、植付作業機を下降させる際、植付作業機よりも先に整地装置が接地することがなく、整地装置の破損などが防止されるという利点がある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−207434号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示される乗用移植機では、植付作業機が下降し、かつ走行機体が設定距離だけ前進したタイミングで、整地装置を退避位置から作業位置に下降させるので、整地装置の接地に時間がかかり、整地作業の開始が遅れる惧れがある。
【0005】
また、特許文献1に示される乗用移植機では、植付作業機から取り出した動力で整地装置の整地ロータを回転駆動させているので、植付開始前に整地装置が作業位置に下降した場合、整地ロータが非回転状態で接地して圃場面を荒らす惧れがある。
【課題を解決するための手段】
【0006】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、走行機体の後部に昇降自在に連結される植付作業機と、前記植付作業機の前方に昇降自在に配置され、整地ロータの回転駆動により圃場面を整地する整地装置と、前記植付作業機及び前記整地装置を昇降制御する制御装置と、を備える乗用移植機であって、前記植付作業機の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で前記整地ロータを回転駆動させると共に、前記整地装置の昇降範囲に、前記整地ロータを接地させて圃場面を整地する作業位置と、前記整地ロータを圃場面から上方に退避させる格納位置と、前記整地ロータを作業位置と格納位置との間で待機させる準備位置と、を設定し、前記植付作業機が上昇状態のときは、前記整地装置を格納位置とし、前記植付作業機が下降状態で、かつ、前記走行機体が走行停止状態のときは、前記整地装置を準備位置とし、前記植付作業機が下降状態で、かつ、前記走行機体が走行状態のときは、前記整地装置を作業位置とし、準備位置から作業位置への下降に際しては、前記整地ロータを回転駆動させながら前記整地装置の下降動作を行うことを特徴とする。
【発明の効果】
【0007】
請求項1の発明によれば、植付作業機が上昇状態のとき整地装置を格納位置に退避させると共に、植付作業機が下降した後、所定のタイミングで整地装置を作業位置に下降させるものでありながら、植付作業機の下降に際して整地装置を格納位置よりも下方の準備位置に待機させ、その後、走行開始に応じて整地装置を準備位置から作業位置に下降させるので、走行開始に応じて整地装置を格納位置から作業位置に下降させる場合に比べ、整地装置を速やかに接地させて整地作業を開始することができる。しかも、準備位置から作業位置への下降に際しては、整地ロータを回転駆動させながら整地装置の下降動作を行うので、整地ロータが非回転状態で接地して圃場面を荒らすことも防止できる。
【図面の簡単な説明】
【0008】
【図1】乗用田植機の全体側面図である。
【図2】操作パネルの正面図である。
【図3】植付深さ調節を示す要部側面図である。
【図4】整地装置の背面斜視図である。
【図5】植付深さ調節に連動した整地ロータの昇降動作を示す要部側面図である。
【図6】整地ロータの昇降位置を示す要部側面図である。
【図7】整地ロータの昇降駆動機構を示す拡大斜視図である。
【図8】制御部の入出力を示すブロック図である。
【図9】作業機操作制御の制御手順を示すフローチャートである。
【図10】整地クラッチ制御の制御手順を示すフローチャートである。
【図11】整地装置高さ制御の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態について、図面に基づいて説明する。図1において、1は乗用田植機(乗用移植機)の走行機体であって、該走行機体1の後部には、昇降リンク機構2を介して植付作業機3が連結されている。植付作業機3は、下降接地状態で植付作業を行うように構成されており、走行機体1と昇降リンク機構2との間に介設される作業機昇降用油圧シリンダ4の伸縮に応じて昇降するようになっている。
【0010】
植付作業機3は、昇降リンク機構2に対して左右傾斜自在に連結される作業機フレーム5と、作業機フレーム5に立設される左右一対の苗載台支持ステー6と、苗載台支持ステー6に左右往復移動自在に支持される苗載台7と、作業機フレーム5から後方に延出する複数のプランタケース8と、プランタケース8の後端部に設けられる植付機構9と、田面を滑走するフロート10とを備えて構成されている。
【0011】
走行機体1は、エンジン(図示せず)が搭載されるエンジン搭載部11と、エンジン動力を変速するミッションケース12と、オペレータが乗車する操作部13と、操舵輪及び駆動輪を兼ねる前輪14と、駆動輪である後輪15とを備える乗用型の四輪車両である。
【0012】
ミッションケース12内には、入力軸、植付伝動軸、走行伝動軸などの伝動軸が設けられている。エンジンから入力軸に入力された動力は、株間変速機構を介して植付伝動軸に伝動されると共に、トルクリミッタ及び植付クラッチを介して、植付伝動軸から植付PTO軸に伝動される。そして、植付PTO軸から取り出される動力は、ミッションケース12外の伝動機構を経由して植付作業機3に伝動される。
【0013】
また、エンジンから入力軸に入力された動力は、副変速機構を介して走行伝動軸に伝動される。走行伝動軸に伝動された動力は、前輪差動機構を介して左右の前輪駆動軸に伝動されると共に、走行PTO軸に伝動される。そして、走行PTO軸から取り出される動力は、ミッションケース12外の伝動機構を経由してリヤアクスルケース16に伝動される。
【0014】
図1及び図2に示すように、操作部13には、オペレータが座る運転座席17、前輪14を操舵するステアリングハンドル18と、主電源スイッチ及びエンジン始動操作具を兼ねるキースイッチ19と、走行変速操作を行う主変速レバー20と、植付作業機3の昇降操作や植付クラッチの断続操作を行う植付作業機操作具21と、後述する整地装置22の格納操作及び作業高さ調節を行う整地装置操作具23と、植付作業モード(ON状態:苗切れ警報制御や作業機水平制御をONにするモード)と非植付作業モード(OFF状態:苗切れ警報制御や作業機水平制御をOFFにするモード)との切り換えを行う作業準備スイッチ24が設けられている。
【0015】
本実施形態の植付作業機操作具21は、上方操作及び下方操作が可能なレバー式操作具であり、後述する所定の操作にもとづいて、植付作業機3の昇降動作状態を「上昇」、「固定」、「自動昇降(下降)」の3つに切換えると共に、植付クラッチの状態を「入り」と「切り」に切り換えることができる。そして、「上昇」状態では、植付作業機3が上昇動作し、「固定」状態では、植付作業機3の昇降が停止し、「自動昇降(下降)」状態では、植付作業機3が下降動作すると共に、接地後は自動昇降動作に移行するようになっている。
【0016】
自動昇降動作は、植付作業機3に対するフロート10の上下位置に応じて植付作業機3を自動的に昇降させる動作である。本実施形態では、図3に示すように、フロート10の前端部にリンク25を介してフロートポテンショメータ26を連結しており、このフロートポテンショメータ26でフロート10の上下位置を検出すると共に、該検出値が所定値を維持するように植付作業機3を自動的に昇降させることにより、苗の植付深さを一定に保つようになっている。
【0017】
植付作業機3の底部には、左右方向に沿ってフロート支持軸27が配置されている。フロート支持軸27には、後下方に延出するフロート支持アーム28が一体的に設けられており、該フロート支持アーム28の先端部にフロート10の後端側が上下揺動自在に連結支持されている。
【0018】
さらに、フロート支持軸27には、苗の植付深さを調節するための植付深さ調節レバー29や、植付深さ調節レバー29の操作に応じてフロートポテンショメータ26の位置を変更するための連動アーム30が一体的に連結されている。尚、本実施形態の苗深さ調節は、植付作業機3に対するフロート10の上下位置を変更することにより行われ、フロート10の揺動支点及びフロートポテンショメータ26との連結点を同時に上下方向に変動させる必要がある。
【0019】
植付深さ調節レバー29は、植付作業機3の前面部から前上方に延出しており、植付作業機3を上昇させれば、運転座席17に座った姿勢で操作できるようになっている。そして、植付深さ調節レバー29を前後方向に操作すると、フロート支持軸27が軸心回りに回動するのに伴い、フロート支持アーム28がフロート支持軸27を支点として上下回動し、フロート10の揺動支点位置を上下方向に変動させる。
【0020】
一方、連動アーム30は、フロートポテンショメータ26が設けられる上下回動自在なベース部材31にロッド32を介して連結され、植付深さ調節レバー29の操作に応じてベース部材31を上下回動させる。ベース部材31が上下回動すると、フロートポテンショメータ26が上下方向に変動し、リンク25を介して連結されるフロート10の前端部を上下方向に変動させる。
【0021】
図1、図4及び図5に示すように、植付作業機3の前方には、整地ロータ33の回転駆動により圃場面を整地する整地装置22が設けられている。整地装置22は、植付作業機3の前面部に設けられる整地フレーム34と、該整地フレーム34の下端部に回転自在に支持されるロータ軸35と、該ロータ軸35に一体的に設けられる上記の整地ロータ33と、整地ロータ33の上方を覆うロータカバー36と、ロータ軸35に回転動力を伝動する整地動力伝動機構37とを備えて構成されている。
【0022】
整地動力伝動機構37は、リヤアクスルケース16から走行系の動力を取り出してロータ軸35に伝動するように構成されている。つまり、リヤアクスルケース16から取り出される走行系の動力は、前述したように、植付作業機3の動力を断続する植付クラッチよりも伝動上流側から取り出した動力であるから、植付クラッチの入り切りにかかわらず整地ロータ33を回転駆動させることができる。また、整地動力伝動機構37は、その伝動経路中に整地クラッチ(図示せず)を備えており、該整地クラッチの操作や制御にもとづいてロータ軸35への動力伝動を入り切りすることができるようになっている。
【0023】
図1、図4及び図5に示すように、整地フレーム34は、平行リンク機構を構成する上リンク38及び下リンク39を介して苗載台支持ステー6に上下昇降自在に連結支持されている。上リンク38の基部は、苗載台支持ステー6に左右方向を向いて架設される整地装置支持軸40に対して一体的に連結されており、整地装置支持軸40の軸心回りの回動に応じて上リンク38が上下に回動することにより、整地装置22が昇降するようになっている。
【0024】
前述したベース部材31は、整地装置支持軸40の中央部に回動自在に支持されると共に、後述する整地昇降駆動機構41を介して整地装置支持軸40に連結されている。つまり、ベース部材31が前述した植付深さ調節レバー29の操作に応じて上下回動した場合、ベース部材31の上下回動に応じて整地装置22の昇降位置も変動される。これにより、植付深さ調節に応じて整地装置22の作業高さが変動してしまうという不都合を解消することができる。
【0025】
図5〜図7に示すように、整地昇降駆動機構41は、ベース部材31に設けられる整地装置昇降モータ(減速機構付き電動モータ)43と、整地装置支持軸40に設けられるセクタギヤ44と、ベース部材31に対するセクタギヤ44の相対的な回動角を検出する整地装置ポテンショメータ45とを備えて構成されている。整地装置昇降モータ43を駆動させると、その出力ギヤ(図示せず)に噛合するセクタギヤ44が整地装置支持軸40を回動させ、それに応じて整地装置22が昇降するようになっている。
【0026】
図6に示すように、整地装置22の昇降範囲には、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置とがあらかじめ設定されている。尚、作業位置は、前述した整地装置操作具23の操作によって「浅」、「中」、「深」の三段階または無段階に調節することができるようになっている。
【0027】
図8に示すように、走行機体1には、マイコンなどを用いて構成される制御部(制御装置)46が設けられている。制御部46の入力側には、前述したキースイッチ19、植付作業機操作具21、整地装置操作具23、作業準備スイッチ24、フロートポテンショメータ26及び整地装置ポテンショメータ45に加え、植付作業機3の昇降位置を検出するリフト角ポテンショメータ47と、走行機体1の走行速度を検出する速度センサ48が接続されている。
【0028】
また、制御部46の出力側には、前述した整地装置昇降モータ43に加え、作業機昇降用油圧シリンダ4を伸縮動作させる植付作業機昇降電磁弁49と、植付クラッチを入り切りさせる植付クラッチモータ50と、整地クラッチを入り切りさせる整地クラッチモータ51が接続されている。
【0029】
制御部46は、植付作業機3を昇降や植付クラッチの入り切りを制御する作業機操作制御と、整地クラッチの入り切りを制御する整地クラッチ制御と、整地装置22の昇降を制御する整地装置高さ制御を実行するようになっている。以下、作業機操作制御、整地クラッチ制御及び整地装置高さ制御の制御手順について、図9〜図11を参照して説明する。
【0030】
図9に示すように、作業機操作制御では、まず、植付作業機操作具21の下方操作や上方操作の有無を判断する(S101、S102)。ここで、植付作業機操作具21の下方操作があった場合は、作業準備スイッチ24のON/OFFを判断すると共に(S103)、該判断結果に拘わらず植付作業機3の昇降動作状態が「上昇」状態であるか否かを判断する(S104、S105)。そして、この判断結果がYESである場合は、植付作業機3の昇降動作状態を「固定」状態とする(S106)。つまり、植付作業機3の上昇動作中に植付作業機操作具21を下方操作すると、植付作業機3の上昇動作が停止される。
【0031】
作業準備スイッチ24がOFFで、かつ、植付作業機3が昇降動作状態が「上昇」状態ではない場合は、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S107)。そして、この判断結果がYESの場合は、そのまま上位ルーチンに復帰するが、判断結果がNOの場合は、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S108)。つまり、植付作業機3の昇降動作状態が「固定」状態のときに植付作業機操作具21を下方操作すると、作業準備スイッチ24がOFFの場合は、植付クラッチの入り切り状態に拘わらず植付作業機3が下降動作される。
【0032】
一方、作業準備スイッチ24がONで、かつ、植付作業機3が昇降動作状態が「上昇」状態ではない場合も、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S109)。そして、この判断結果がNOの場合は、植付クラッチが入り状態であるか否かを判断し(S110)、この判断結果がNOの場合にのみ、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S111)。つまり、植付作業機3の昇降動作状態が「固定」状態のときに植付作業機操作具21を下方操作すると、作業準備スイッチ24がONの場合は、植付クラッチが切り状態のときのみ植付作業機3が下降動作される。
【0033】
また、ステップS109の判断結果がYESの場合は、植付作業機3の接地、すなわち自動昇降動作による下降停止を判断し(S112)、この判断結果がYESの場合は、植付クラッチを入りとし(S113)、判断結果がNOの場合は、植付クラッチ入り待ち状態とする(S114)。つまり、植付作業機3が接地した状態で植付作業機操作具21を下方操作すると、植付クラッチが入りとなって苗の植付けが開始される。また、植付作業機3が接地する前に植付作業機操作具21を下方操作すると、植付クラッチ入り待ち状態となり、接地後に植付クラッチが入りとされる(S115〜S117)。
【0034】
一方、植付作業機操作具21の上方操作があった場合は、植付作業機3の昇降動作状態が「上昇」状態であるか否かを判断し(S118)、この判断結果がYESの場合は、そのまま上位ルーチンに復帰するが、判断結果がNOの場合は、植付作業機3の昇降動作状態が「自動昇降(下降)」状態であるか否かを判断する(S119)。この判断結果がYESの場合は、植付作業機3の接地、すなわち自動昇降動作による下降停止を判断し(S120)、この判断結果がYESの場合は、植付作業機3の昇降動作状態を「上昇」状態とし(S121)、判断結果がNOの場合は、植付作業機3の昇降動作状態を「固定」状態とする(S122)。つまり、植付作業機3が接地した状態で植付作業機操作具21を上方操作すると、植付作業機3が上昇動作され、植付作業機3の下降動作中に植付作業機操作具21を上方操作すると、植付作業機3の下降動作が停止される。
【0035】
また、ステップS119の判断結果がNOの場合は、植付クラッチが入り状態であるか否かを判断し(S123)、この判断結果がNOの場合は、植付作業機3の昇降動作状態を「上昇」状態とし(S121)、判断結果がYESの場合は、植付作業機3の昇降動作状態を「自動昇降(下降)」状態とする(S124)。つまり、植付作業機3の昇降動作状態が「固定」のときに植付作業機操作具21を上方操作すると、植付クラッチが切りの場合は、植付作業機3が上昇動作されるが、植付クラッチが入りのときは、植付作業機3が下降動作される。
【0036】
図10に示すように、整地クラッチ制御では、整地クラッチを入りにする4つの条件を判断し(S201〜S204)、これらの条件をすべて満たす場合にのみ整地クラッチを入りとする一方(S205)、それ以外の場合は整地クラッチを入りとする(S206)。整地クラッチを入りにする4つの条件は、キースイッチ19がOFFではないこと(S201)、作業準備スイッチ24がONであること(S202)、整地装置操作具23が格納位置以外であること(S203)、植付作業機3の昇降高さが所定の高さh1(非接地高さ)以下であること(S204)、であり、整地クラッチを入りにすると、植付クラッチの入り切りに拘わらず整地装置22の整地ロータ33を回転駆動させることが可能であり、植付作業機3の下降時には、植付作業機3が接地する前、すなわち植付作業機3の昇降高さが所定の高さh1以下となった時点で整地クラッチが入りとなり、整地ロータ33の回転駆動が開始される。尚、本発明においては、整地クラッチや整地クラッチ制御の有無は任意である。例えば、機体走行時に整地ロータ33を常に回転駆動させるものであっても本発明に含まれる。
【0037】
図11に示すように、整地装置高さ制御では、まず、4つの条件を判断し(S301〜S304)、これらの条件をすべて満たす場合にのみ整地装置22を作業位置(または準備位置)とする一方(S305、S306)、それ以外の場合は整地装置22を格納位置とする(S307)。整地装置22を作業位置(または準備位置)にする4つの条件は、キースイッチ19がOFFではないこと(S301)、作業準備スイッチ24がONであること(S302)、整地装置操作具23が格納位置以外であること(S303)、植付作業機3の昇降動作状態が「上昇」、「固定」以外であること(S304)、である。
【0038】
上記の条件を満たす場合は、次いで走行機体1の走行速度を判断する(S308、S309)。そして、走行機体1の走行速度がV1(走行/停止判定用速度)に満たない場合は、整地装置22を準備位置とする(S306)。また、走行機体1の走行速度がV1以上で、かつ、V2(高速植付/中低速植付判定用速度)に満たない場合は、整地装置22を整地装置操作具23で設定された作業位置とする(S305)。また、走行機体1の走行速度がV2以上の場合、すなわち高速植付の場合は、整地装置22を整地装置操作具23で設定された作業位置よりも上方に補正された補正作業位置とし(S310)、整地装置22による水押しや、水押しに伴う隣接植付苗の倒れを低減させる。
【0039】
そして、上記のような整地クラッチ制御や整地装置高さ制御によれば、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置を作業位置(または補正作業位置)とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うことが可能になる。
【0040】
叙述の如く構成された本実施形態によれば、走行機体1の後部に昇降自在に連結される植付作業機3と、植付作業機3の前方に昇降自在に配置され、整地ロータ33の回転駆動により圃場面を整地する整地装置22と、植付作業機3及び整地装置22を昇降制御する制御部46と、を備える乗用田植機であって、植付作業機3の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で整地ロータ33を回転駆動させると共に、整地装置22の昇降範囲に、整地ロータ33を接地させて圃場面を整地する作業位置と、整地ロータ33を圃場面から上方に退避させる格納位置と、整地ロータ33を作業位置と格納位置との間で待機させる準備位置と、を設定し、植付作業機3が上昇状態のときは、整地装置22を格納位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行停止状態のときは、整地装置22を準備位置とし、植付作業機3が下降状態で、かつ、走行機体1が走行状態のときは、整地装置22を作業位置とし、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うので、植付作業機3が上昇状態のとき整地装置22を格納位置に退避させると共に、植付作業機3が下降した後、所定のタイミングで整地装置22を作業位置に下降させるものでありながら、植付作業機3の下降に際して整地装置22を格納位置よりも下方の準備位置に待機させ、その後、走行開始に応じて整地装置22を準備位置から作業位置に下降させるので、走行開始に応じて整地装置22を格納位置から作業位置に下降させる場合に比べ、整地装置22を速やかに接地させて整地作業を開始することができる。しかも、準備位置から作業位置への下降に際しては、整地ロータ33を回転駆動させながら整地装置22の下降動作を行うので、整地ロータ33が非回転状態で接地して圃場面を荒らすことも防止できる。
【符号の説明】
【0041】
1 走行機体
3 植付作業機
21 植付作業機操作具
22 整地装置
23 整地装置操作具
33 整地ロータ
43 整地装置昇降モータ
46 制御部
47 リフト角ポテンショメータ
48 速度センサ
49 植付作業機昇降電磁弁
50 植付クラッチモータ
51 整地クラッチモータ
【特許請求の範囲】
【請求項1】
走行機体の後部に昇降自在に連結される植付作業機と、
前記植付作業機の前方に昇降自在に配置され、整地ロータの回転駆動により圃場面を整地する整地装置と、
前記植付作業機及び前記整地装置を昇降制御する制御装置と、を備える乗用移植機であって、
前記植付作業機の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で前記整地ロータを回転駆動させると共に、
前記整地装置の昇降範囲に、
前記整地ロータを接地させて圃場面を整地する作業位置と、
前記整地ロータを圃場面から上方に退避させる格納位置と、
前記整地ロータを作業位置と格納位置との間で待機させる準備位置と、を設定し、
前記植付作業機が上昇状態のときは、前記整地装置を格納位置とし、
前記植付作業機が下降状態で、かつ、前記走行機体が走行停止状態のときは、前記整地装置を準備位置とし、
前記植付作業機が下降状態で、かつ、前記走行機体が走行状態のときは、前記整地装置を作業位置とし、
準備位置から作業位置への下降に際しては、前記整地ロータを回転駆動させながら前記整地装置の下降動作を行うことを特徴とする乗用型移植機。
【請求項1】
走行機体の後部に昇降自在に連結される植付作業機と、
前記植付作業機の前方に昇降自在に配置され、整地ロータの回転駆動により圃場面を整地する整地装置と、
前記植付作業機及び前記整地装置を昇降制御する制御装置と、を備える乗用移植機であって、
前記植付作業機の動力を断続する植付クラッチよりも伝動上流側から取り出した動力で前記整地ロータを回転駆動させると共に、
前記整地装置の昇降範囲に、
前記整地ロータを接地させて圃場面を整地する作業位置と、
前記整地ロータを圃場面から上方に退避させる格納位置と、
前記整地ロータを作業位置と格納位置との間で待機させる準備位置と、を設定し、
前記植付作業機が上昇状態のときは、前記整地装置を格納位置とし、
前記植付作業機が下降状態で、かつ、前記走行機体が走行停止状態のときは、前記整地装置を準備位置とし、
前記植付作業機が下降状態で、かつ、前記走行機体が走行状態のときは、前記整地装置を作業位置とし、
準備位置から作業位置への下降に際しては、前記整地ロータを回転駆動させながら前記整地装置の下降動作を行うことを特徴とする乗用型移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−85495(P2013−85495A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226949(P2011−226949)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]