
乳牛の健康状態管理方法及び管理システム
【課題】 健康状態に対する誤判別の確率を大幅に低減し、乳牛の健康状態を的確に管理可能にするとともに、乳牛の健康や疾病等をより早くより的確に把握可能にする。
【解決手段】 自動給餌機2に、ストールAc…の飼槽位置Xf…における飼料B…の量を検出可能な餌量検出センサ部3及びストールAc…の特定位置Px…,Py…における牛体Cm…の有無を検出する牛体検出センサ部4を付設し、所定の給餌時に自動給餌機2が各ストールAc…へ移動した際に、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理する。
【解決手段】 自動給餌機2に、ストールAc…の飼槽位置Xf…における飼料B…の量を検出可能な餌量検出センサ部3及びストールAc…の特定位置Px…,Py…における牛体Cm…の有無を検出する牛体検出センサ部4を付設し、所定の給餌時に自動給餌機2が各ストールAc…へ移動した際に、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ストールに繋留された乳牛の健康状態を管理する際に用いて好適な乳牛の健康状態管理方法及び管理システムに関する。
【背景技術】
【0002】
一般に、ストールに繋留される乳牛の健康管理は、疾病や体調不良の早期発見或いは飼養環境の早期改善などを行うことにより、乳牛の良好な健康状態を維持する上で重要である。特に、近年では乳牛の高泌乳化が進み、分娩後の負のエネルギバランスや暑熱などのストレスが乳牛への負担を増大させていることから、各乳牛毎の健康状態に対する的確かつ早期の把握がより重要性を増している。また、酪農家では、個体観察等により各乳牛の体調把握をしようと努めるが、近年の多頭数飼育に伴い、繋ぎ飼い方式であっても十分な把握は容易でないのが実状である。
【0003】
そこで、本出願人は、既に、このような乳牛の健康管理に用いて好適な乳牛の健康状態判別方法及び判別システムを特許文献1により提案した。同文献1に開示される乳牛の健康状態判別方法は、乳牛の健康状態を的確かつ早期に把握可能にするとともに、乳牛に対して無用なストレスを与えることがなく、かつ低コストの実施を目的としたものであり、具体的には、ストールに繋留された乳牛の健康状態を判別するに際し、予め、少なくとも、自動給餌機に設けることにより乳牛の牛番を検出する牛番検出センサの検出タイミングに係わる反応データと乳牛の存在を検出する牛体検出センサの検出タイミングに係わる反応データの一つ及び/又は組合わせに対する判別条件を設定するとともに、自動給餌機が任意のストールに移動して給餌を行う際に、牛番検出センサの検出タイミングに係わる反応データ及び牛体検出センサの検出タイミングに係わる反応データを検出し、検出した反応データと判別条件に基づいて乳牛の健康状態を判別処理するようにしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−207130号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述した従来における乳牛の健康状態判別方法及び判別システムは、次のような解決すべき課題も存在した。
【0006】
第一に、給餌時の採食反応(食欲)を把握する方法として、牛体検出センサにより牛体の動きを検出しているが、乳牛の性格(個性)によっては、採食反応と牛体の動きに相関を示さない場合がある。例えば、警戒心の強い乳牛の場合、自動給餌機により給餌を行っている際は、あまり餌に近付こうとせず、自動給餌機が次のストールに移動してから食べ始める乳牛も存在する。したがって、この場合、誤判別を生じる確率が高くなり、健康状態を正確かつ確実に判別する観点からは必ずしも十分であるとは言えなかった。
【0007】
第二に、乳牛の耳に取付けたICタグを読み取るための牛番検出センサに、乳牛の存在を検出する機能を兼用させている。したがって、乳牛に取付けるICタグが必要となり、乳牛に対するストレス要因及びコストアップ要因となる。しかも、牛体検出センサ及び牛番検出センサは、双方共に牛体の存在の有無を検出する目的で使用するため、得られる情報は限定される。結局、できるだけ多くの異なる情報を得ることにより、乳牛の健康や疾病等に係わる情報をより早くより的確に得る観点からは更なる改善の余地があった。
【0008】
本発明は、このような背景技術に存在する課題を解決した乳牛の健康状態管理方法及び管理システムの提供を目的とするものである。
【課題を解決するための手段】
【0009】
本発明に係る乳牛の健康状態管理方法は、上述した課題を解決するため、ストールAc…に繋留された乳牛C…の健康状態を管理するに際し、自動給餌機2に、ストールAc…の飼槽位置Xf…における飼料B…の量を検出可能な餌量検出センサ部3及びストールAc…の特定位置Px…,Py…における牛体Cm…の有無を検出する牛体検出センサ部4を付設し、所定の給餌時に自動給餌機2が各ストールAc…へ移動した際に、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理することを特徴とする。
【0010】
また、本発明に係る乳牛の健康状態管理システム1は、ストールAc…に繋留された乳牛C…の健康状態を管理するための健康状態管理システムを構成するに際して、自動給餌機2に付設することによりストールAc…の飼槽位置Xf…における飼料B…の残量Qr…を検出可能な餌量検出センサ部3と、自動給餌機2に付設することによりストールAc…の特定位置Px…,Py…における牛体Cm…の存在有無を検出する牛体検出センサ部4と、牛体検出センサ部4により検出した牛体Cm…の存在有無の検出結果と餌量検出センサ部3により検出した飼料B…の残量Qr…の検出結果に基づいて乳牛C…の健康状態を管理する健康状態管理手段5とを具備してなることを特徴とする。
【0011】
この場合、発明の好適な態様により、餌量検出センサ部3には、飼槽位置Xf…における飼料B…に対して上方に配することにより当該飼料B…の高さHq…を検出可能な反射型の超音波センサ3sを用いることができる。また、牛体検出センサ部4には、複数の異なる特定位置Px…,Py…における牛体Cm…の存在有無をそれぞれ検出可能な複数の牛体検出センサ4x,4y、望ましくは、動いている牛体Cm…を検知可能な焦電型の赤外線センサ4xw,4ywを用いることができる。一方、健康状態管理手段5には、残量Qr…の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素Da…,Db…,Dc…と、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能Fpを設けることができるとともに、さらに、当該残量Qr…の検出結果による被判別要素Da…,Db…,Dc…、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上を表Ta,Tb及び/又はグラフGにより時系列に表示する健康状態表示機能Fdを設けることができる。
【発明の効果】
【0012】
このような本発明に係る乳牛の健康状態管理方法及び管理システム1によれば、次のような顕著な効果を奏する。
【0013】
(1) 餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理するようにしたため、健康状態に対する誤判別の確率を大幅に低減し、乳牛C…の健康状態を的確に管理することができる。
【0014】
(2) 乳牛C…に取付けるICタグが不要になるため、乳牛C…における無用なストレス要因の一つを解消できるとともに、システムのコスト低減にも寄与できる。また、自動給餌機2に付設した餌量検出センサ部3により、飼槽位置Xf…における飼料B…の残量Qrを検出するため、乳牛C…の食欲を直接的に検出できる。したがって、乳牛C…の行動に係わる情報と併せ、健康状態を示す複数の多面的な情報を得ることが可能となり、乳牛C…の健康や疾病等をより早くより的確に把握することができる。
【0015】
(3) 好適な態様により、餌量検出センサ部3に、飼槽位置Xf…における飼料B…に対して上方に配することにより当該飼料B…の高さHq…を検出可能な反射型の超音波センサ3sを用いれば、飼料B…の量(残量Qr)を、飼料B…の高さHq…により容易に検出できるとともに、比較的汎用的なセンサの利用により低コストに実施できる。
【0016】
(4) 好適な態様により、牛体検出センサ部4に、複数の異なる特定位置Px…,Py…における牛体Cm…の存在有無をそれぞれ検出可能な複数の牛体検出センサ4x,4yを用いれば、乳牛C…の行動に係わる多様化した情報を得れるため、乳牛C…の健康状態をより的確に判別できる。
【0017】
(5) 好適な態様により、牛体検出センサ4x,4yに、動いている牛体Cm…を検知可能な焦電型の赤外線センサ4xw,4ywを用いれば、通常、自動給餌機2により給餌を行う際に使用する、乳牛C…の存在を確認するセンサと兼用できるとともに、ストールAc…等の固定障害物に左右されることなく、動きのある乳牛C…のみを確実に検出できる。
【0018】
(6) 好適な態様により、健康状態管理手段5に、残量Qr…の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素Da…と、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能Fpを設ければ、健康状態を判別するための情報数及びその組合せ数をより多くできるため、健康状態に対する判別結果の的確性及び信頼性をより高めることができる。
【0019】
(7) 好適な態様により、健康状態判別手段5に、残量Qr…の検出結果による被判別要素Da…、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上を表Ta,Tb及び/又はグラフGにより時系列に表示する健康状態表示機能Fdを設ければ、牧場全体の牛群の飼養管理が適切に行われているかの判断材料或いは各乳牛C…の健康状態を把握するための判断材料として活用できるとともに、目視により、乳牛C…の健康状態及びその変化状態(経過状態)等を容易かつ明確に知ることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の好適実施形態に係る乳牛の健康状態管理方法の処理手順を説明するためのフローチャート、
【図2】本発明の好適実施形態に係る乳牛の健康状態管理システムを実施できる繋留牛舎における内部のレイアウト構成を示す平面概略図、
【図3】同健康状態管理システムに用いる餌量検出センサ部及び牛体検出センサ部と乳牛の位置関係を示す説明図、
【図4】同繋留牛舎に備える給餌システムにおける自動給餌機の内部構造図、
【図5】同繋留牛舎の一部であって搾乳システムの一部を示す側面構成図、
【図6】同健康状態管理システムに用いる超音波センサの計測値と残量高さのスケール実測値の相関図、
【図7】同健康状態管理システムを含む乳牛飼養管理システムの全体構成を示すブロック系統図、
【図8】同健康状態管理方法により得られる検出結果から被判別要素をランク分けするための説明図、
【図9】同健康状態管理方法により得られる被判別要素から健康状態を判別する判別条件及び判別結果の説明図、
【図10】同健康状態管理システムの健康状態管理手段における健康状態表示機能により表示する給餌回に対する被判別要素表、
【図11】同健康状態表示機能により表示する特定の乳牛の分娩日後の経過日数に対する被判別要素表及び乳量変化グラフ、
【発明を実施するための形態】
【0021】
次に、本発明に係る好適実施形態を挙げ、図面に基づき詳細に説明する。
【0022】
まず、本発明の理解を容易にするため、繋留牛舎の全体構成について、図2〜図5を参照して説明する。
【0023】
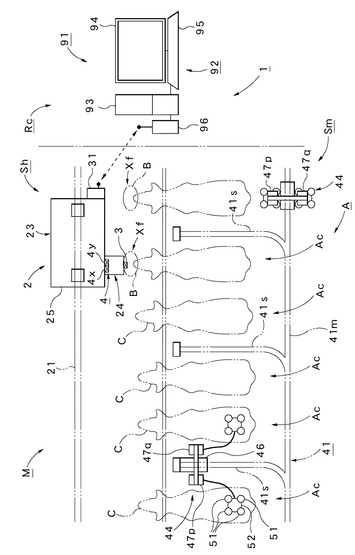
図2は、繋留牛舎Mの内部における概要を示す。この繋留牛舎Mには多数のストールAc…が配列するストール群Aが設置され、各ストールAc…に乳牛C…が係留されている。そして、このストール群Aの上方に、ストール群Aに沿った搾乳システムSmが設置されるとともに、このストール群Aの前方に、ストール群Aに沿った給餌システムShが設置される。
【0024】
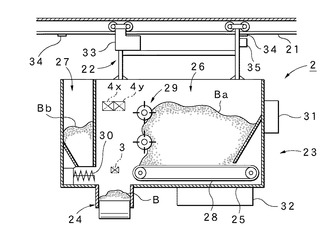
給餌システムShは、ストール群Aの前上方に配したガイドレール部21と、このガイドレール部21に沿って移動する自動給餌機2を備える。この自動給餌機2は、図3及び図4に示すように、ガイドレール部21に装填した自走式の移動部22と、この移動部22に吊下げられた給餌機本体23を備える。給餌機本体23は、底部に飼料排出部24を有する飼料ケース部25を備える。飼料ケース部25は、粗飼料Baを収容する粗飼料収容部26と配合飼料Bbを収容する配合飼料収容部27を有する。そして、粗飼料収容部26の内部には、粗飼料繰出コンベア機構28及び繰出量を安定化させるビータ機構29を配設するとともに、配合飼料収容部27の内部には、スクリュ式の繰出オーガ機構30を配設する。
【0025】
また、飼料ケース部25の外側面にはコントローラ部31を配設するとともに、飼料ケース部25の下面にはバッテリを収容したバッテリボックス32を配設する。上述した移動部22は駆動モータを用いた駆動部33を搭載し、この駆動部33はコントローラ部31により駆動制御される。なお、移動部22の停止や移動方向の制御は、移動部22に設けた検出部(検出センサ)35が、ガイドレール部21の所定位置に設けた被検出部34…を検出することにより行われる。このような給餌システムShの構成により、各ストールAc…に対して自動給餌機2を自動で移動させ、各飼槽位置Hf…に、粗飼料Baと配合飼料Bbが配合された飼料Bを投与(給餌)することができる。
【0026】
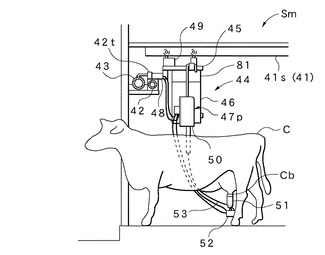
一方、搾乳システムSmは、ストール群Aの上方に配したガイドレール部41を備える。ガイドレール部41は、ストール群Aに沿って配した主レール41mと、この主レール41mの中途位置から直角方向に分岐し、かつストールAc…間に配した複数の分岐レール41s…を備える。この場合、分岐レール41s…は、配列するストールAc…に対して一つ置き、即ち、相隣る分岐レール41sと41s…間に二つのストールAc…が入るように配する。また、分岐レール41s…の先端前方には、図5に示すミルクライン42及び真空ライン43を配置する。ミルクライン42及び真空ライン43はストール群Aに沿って配し、各分岐レール41s…に対向する位置には、後述するディストリビュータ48を接続するミルクタップ42t…を付設する。
【0027】
さらに、搾乳システムSmには、ガイドレール部41に沿って移動する一台又は二台以上の搾乳機44…を備える。搾乳機44は、ガイドレール部41に装填した自走式の移動部45と、この移動部45に搭載したコントローラ部46と、移動部45の両側に吊下げた左右一対の搾乳ユニット47p,47qと、移動部45の先端に設けたディストリビュータ48を備える。この場合、移動部45には駆動モータを用いた駆動部49を搭載し、この駆動部49はバッテリを内蔵するコントローラ部46により駆動制御される。なお、移動部45の停止や移動方向の制御は、移動部45に設けた検出部(検出センサ)がガイドレール部41の所定位置に配した被検出部を検出することにより行われる。搾乳ユニット47p(47qも同じ)は、パルセータや自動離脱装置等を含むユニット本体50と、乳牛Cの各乳房Cb…に装着する四つのティートカップ51…と、ミルククロー52を備え、ミルクチューブにより、ティートカップ51…とミルククロー52とユニット本体50とディストリビュータ48間を接続するとともに、真空チューブにより、ティートカップ51…とユニット本体50とディストリビュータ48間を接続する。また、ミルククロー52とユニット本体50は離脱用ワイヤ53により接続する。このような搾乳システムSmの構成により、各ストールAc…に対して搾乳機44を自動で移動させて搾乳を行うことができる。
【0028】
次に、本実施形態に係る乳牛の健康状態管理システム1を含む全体の制御系(電気系)の構成について、図2〜図7を参照して説明する。
【0029】
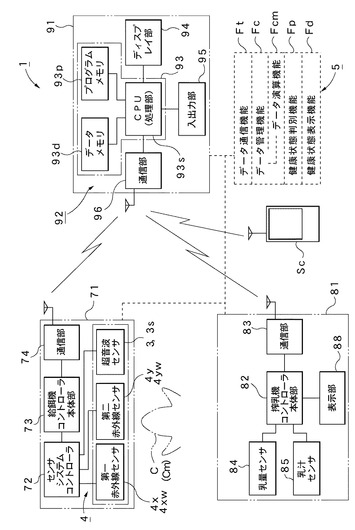
図7に示すように、給餌システムShにおける自動給餌機2には、給餌機コントローラ71を搭載する。給餌機コントローラ71は、給餌機コントローラ本体部73を備えるとともに、この給餌機コントローラ本体部73に接続した無線通信部74を備える。給餌機コントローラ本体部73は、コンピュータ機能を備え、メモリに格納した処理プログラムに基づく一連の制御処理(シーケンス制御処理)をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。この場合、給餌機コントローラ本体部73及び無線通信部74は、図4に示すコントローラ部31に内蔵する。
【0030】
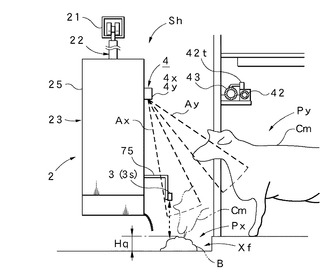
また、自動給餌機2には、図3及び図4に示すように、餌量検出センサ部3と牛体検出センサ部4を付設し、それぞれセンサシステムコントローラ72に接続するとともに、このセンサシステムコントローラ72は給餌機コントローラ本体部73に接続する。この場合、餌量検出センサ部3は、ストールAcの飼槽位置Xfにおける飼料B(残量Qr)の高さHqを検出可能に配設する。例示の餌量検出センサ部3は、飼槽位置Xfにおける飼料Bに対して上方に配することにより当該飼料Bの高さHqを検出可能な測距センサである反射型の超音波センサ3sを用いる。この超音波センサ3sは、自動給餌機2の外面であって、ストールAcに対する対向面に配設する。このため、自動給餌機2の外面にステー75を取付け、このステー75の先端に超音波センサ3sを取付ける。このようなステー75を利用すれば、ステー75の長さや形状等を変えることにより超音波センサ3sの最適位置を設定できる。これにより、超音波センサ3sからの超音波は、下方における飼槽位置Xfに投与された飼料Bの略中央付近に投射される。
【0031】
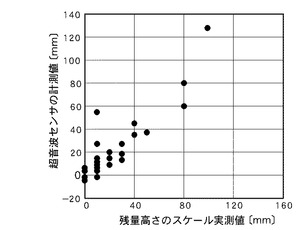
このように、餌量検出センサ部3として、飼槽位置Xfにおける飼料Bに対して上方に配することにより当該飼料Bの高さHqを検出可能な反射型の超音波センサ3sを用いれば、飼料Bの量(残量Qr)を、飼料Bの高さHqにより容易に検出できるとともに、比較的汎用的なセンサの利用により低コストに実施できる利点がある。なお、図6は、残量Qrの高さHqのスケール実測値〔mm〕と超音波センサ3sの実際の計測値〔mm〕の相関図を示す。図6から明らかなように、超音波センサ3sを用いた場合であっても、概ね実測値に近い値を示している。残量Qrの検出結果に対しては、後述するように、少量レベル(30mm以下),中間量レベル(31〜74mm),多量レベル(75mm以上)の三つのランクにランク分けするため、実測する絶対値としての正確性はさほど重要ではない。したがって、図6に示す結果であっても十分に実用可能となる。
【0032】
一方、牛体検出センサ部4は、ストールAcの特定位置Px,Pyにおける牛体Cmの有無を検出可能に配設する。牛体検出センサ部4は、二つの異なる特定位置Px,Pyにおける牛体Cmの存在有無をそれぞれ検出可能な二つの牛体検出センサ4x,4yを備える。各牛体検出センサ4x,4yには、動いている牛体Cmを検知可能な焦電型の赤外線センサ4xw,4yw、即ち、第一赤外線センサ4xwと第二赤外線センサ4ywを用いる。各赤外線センサ4xw,4ywは、図3に示すように、飼料ケース部25の外面であって、ストールAcに対する対向面の上部位置に横方に並べて配設する。この場合、図3に示すように、第一赤外線センサ4xwの検出エリアAxは、特定位置Pxを含み、この特定位置Pxは飼槽位置Xfとなる。また、第二赤外線センサ4ywの検出エリアAyは、特定位置Pyを含み、この特定位置PyはストールAcの内部位置となる。なお、焦電型の赤外線センサ4xw,4ywは、センサ視野内で牛体Cmが動いたときに生じる赤外線エネルギ量の分布変化を検出する機能を備える。このため、動かない物体であるストールAcのポールやネックレール等の固定障害物に影響を受けないとともに、動かない牛体Cm(乳牛C)も検出しない。例示する赤外線センサ4xw,4ywの検出可能範囲は概ね2〔m〕程度である。
【0033】
第一赤外線センサ4xwと第二赤外線センサ4ywを、このような配置構成とすれば、第一赤外線センサ4xwにより、飼槽位置Xf(特定位置Px)に頭を出して飼料Bを採食する牛体Cmの存在有無を検出できるとともに、第二赤外線センサ4ywにより、ストールAcの内部における牛体Cmの存在有無を検出できる。このように、牛体検出センサ部4に、二つ(一般的には複数)の異なる特定位置Px,Pyにおける牛体Cmの存在有無をそれぞれ検出する複数の牛体検出センサ4x,4yを用いれば、乳牛Cの行動に係わる多様化した情報を得れるため、乳牛C…の健康状態をより的確に判別できる利点がある。特に、牛体検出センサ4x,4yとして、動いている牛体Cmを検知する焦電型の赤外線センサ4xw,4ywを用いたため、通常、自動給餌機2によって給餌を行う際に使用する、乳牛Cの存在を確認するセンサと兼用できるとともに、ストールAc…等の固定障害物に左右されることなく、動きのある乳牛Cのみを確実に検出できる利点がある。
【0034】
他方、搾乳システムSmの搾乳機44には、搾乳機コントローラ81を搭載する。搾乳機コントローラ81は、搾乳機コントローラ本体部82を備えるとともに、この搾乳機コントローラ本体部82に接続した、無線通信部83,乳量センサ84及び乳汁センサ85を備える。搾乳機コントローラ本体部82は、コンピュータ機能を備え、メモリに格納した処理プログラムに基づく一連の制御処理(シーケンス制御処理)をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。この場合、搾乳機コントローラ本体部82及び無線通信部83は、図5に示す搾乳機コントローラ81に内蔵するとともに、乳量センサ84…及び乳汁センサ85…は、各搾乳ユニット47p…(47q…)におけるユニット本体50…に内蔵する。乳量センサ84は搾乳時の乳量を検出する機能を有するとともに、乳汁センサ85は搾乳した乳汁の品質を検査する機能を有する。なお、この乳汁センサ85には乳汁の品質(特性)が正常か否かを検出する様々なセンサを適用できる。また、88は表示部を示す。
【0035】
さらに、繋留牛舎Mの内部又は外部には管理室Rcを設け、この管理室Rcの内部に管理コントローラ91を設置する。管理コントローラ91は、図2に示すように、汎用コンピュータシステム92により構成できる。汎用コンピュータシステム92は、コンピュータ本体部93と、このコンピュータ本体部93に接続したディスプレイ94,入出力部95及び無線通信部96を備える。コンピュータ本体部93は、CPU(処理部)93s,データメモリ93d及びプログラムメモリ93p等を含むコンピュータ機能を備え、プログラムメモリ93pに格納した処理プログラムに基づく各種管理処理をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。ディスプレイ94は、カラー液晶ディスプレイ等を利用できるとともに、入出力部95には、外部メディア用ドライブ,キーボードやマウス等の入力部、及びプリンタ等の出力部を含む。管理コントローラ91は、無線通信部96及び無線通信部74を介して給餌機コントローラ本体部73と相互通信できるとともに、無線通信部96及び無線通信部83を介して搾乳機コントローラ本体部82と相互通信できる。さらに、管理コントローラ91は、PDA等のモバイルコンピューティング装置や携帯電話等を含むモバイル端末装置Scに対して相互通信できる。したがって、管理コントローラ91は、データ通信機能Ft,データ管理機能Fc及びデータ演算機能Fcmを含む。
【0036】
また、管理コントローラ91は、乳牛Cの健康状態を管理する健康状態管理手段5を備えるとともに、この健康状態管理手段5は、さらに、健康状態判別機能Fpと健康状態表示機能Fdを備える。したがって、健康状態判別機能Fpは、コンピュータ本体部93により実行されるとともに、健康状態表示機能Fdは、コンピュータ本体部93及びディスプレイ94により実行される。
【0037】
健康状態判別機能Fpは、餌量検出センサ部3、即ち、超音波センサ3sにより検出した飼料Bの残量Qrの検出結果と、牛体検出センサ部4、即ち、第一赤外線センサ4xw及び第二赤外線センサ4ywにより検出した牛体Cmの存在有無の検出結果に基づいて乳牛Cの健康状態を判別する機能を備える。具体的には、飼料Bの残量Qrの検出結果を三つ(一般的には複数)のランクにランク分けし、このランク分けによる被判別要素Da,Db,Dcと、二つの牛体検出センサ4x,4y、即ち、第一赤外線センサ4xwと第二赤外線センサ4ywの検出結果による被判別要素Dx,Dy,Dzとの組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する機能を備える。
【0038】
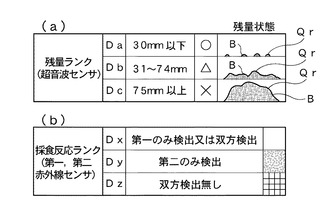
この場合、残量Qrの検出結果に対するランク分けは、図8(a)に示すように、残量Qrが30mm以下の少量レベルの場合、食欲旺盛と判断する被判別要素Daとし、残量Qrが31〜74mmの中量レベルの場合、食欲が少し無いと判断する被判別要素Dbとし、残量Qrが75mm以上の多量レベルの場合、食欲がほとんど無いと判断する被判別要素Dcとする。なお、これらの被判別要素Da,Db,Dcを表示する場合のマークを図8(a)に示す。一方、第一赤外線センサ4xw及び第二赤外線センサ4ywにより検出した牛体Cmの存在有無の検出結果に対するランク分けは、図8(b)に示すように、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方、又は第一赤外線センサ4xwのみが牛体Cmを検出する場合、牛体Cmは飼槽位置Xfに頭を出して採食状態にあったものと判断する被判別要素Dxとし、第二赤外線センサ4ywのみが牛体Cmを検出する場合、牛体Cmは牛床内では動いたが飼槽位置Xfに頭を出して採食状態にはなかったものと判断する被判別要素Dyとし、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方による検出が無い場合、牛体Cmの動きは無いものと判断する被判別要素Dzとする。なお、これらの被判別要素Dx,Dy,Dzを表示する場合のマークを図8(b)に示す。
【0039】
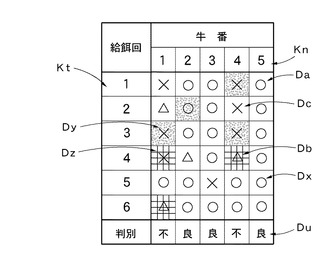
そして、判別条件は、例示の場合、一日、六回の給餌において、図8(a)によりランク分けした残飼ランクが、被判別要素Db又はDcであること、かつ図8(b)によりランク分けした採食反応ランクが、被判別要素Dy又はDzであること(ただし、初回給餌の場合は、被判別要素Db又はDcであること)が三回以上発生することを条件として設定し、この判別条件を満たす場合には、健康状態に問題がある不良牛として判別する。したがって、この判別条件を満たさなければ、健康状態が良好な良牛と判別する。図9は、以上の判別条件を適用して判別した五頭の乳牛C…の例を示し、Knは牛番(番号1〜5)、Ktは給餌回(1〜6回目)、Duは判別結果を示す。健康状態管理手段5に、このような健康状態判別機能Fpを設ければ、健康状態を判別するための情報数及びその組合せ数をより多くできるため、健康状態に対する判別結果の的確性及び信頼性をより高めることができる。
【0040】
一方、健康状態表示機能Fdは、残量Qrの検出結果に対するランク分けによる被判別要素Da…,Db…,Dc…、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上、更には、これらに対して他のモニタリングデータを加え、表Ta,Tb(図10,図11)及び/又はグラフG(図11)により時系列に表示する機能を備える。このような健康状態表示機能Fdを設ければ、牧場全体の牛群の飼養管理が適切に行われているかの判断材料或いは各乳牛C…の健康状態を把握するための判断材料として活用できるとともに、目視により、乳牛C…の健康状態及びその変化状態(経過状態)等を容易かつ明確に知ることができる。したがって、管理コントローラ91のプログラムメモリ93pには、このような健康状態判別機能Fpに基づく判別処理及び健康状態表示機能Fdに基づく表示処理を実行するための処理プログラムが格納されている。
【0041】
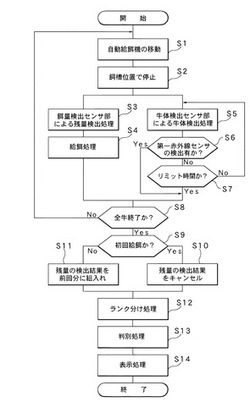
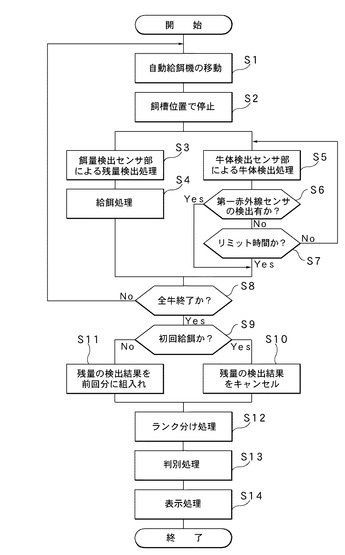
次に、本実施形態に係る健康状態管理方法を含む健康状態管理システム1の動作(機能)について、図2〜図11を参照しつつ図1に示すフローチャートに従って説明する。
【0042】
今、給餌システムShにおいて、自動給餌機2はホームポジョンに停止し、待機中にあるものとする。待機中において、給餌開始時刻になれば、給餌機コントローラ本体部73は、管理コントローラ91から管理データを受信し、この管理データに基づいて給餌工程を行う。この管理データには、全ての乳牛C…の牛番,各牛番に対応する牛床番号及び給餌量データ等が含まれており、管理データを受信したなら給餌機コントローラ本体部73に登録されている前回の給餌時に使用した管理データの更新を行う。
【0043】
管理データを更新したなら給餌工程を開始する。給餌工程の開始により自動給餌機2はガイドレール部21に沿って自動で移動する(ステップS1)。移動中に、自動給餌機2の検出部35が被検出部34を検出する飼槽位置Xfに達すれば、その飼槽位置Xfで停止する(ステップS2)。停止したなら、まず、超音波センサ3s(餌量検出センサ部3)により飼料Bの残量Qrの検出、即ち、飼料Bの食べ残し(残飼)の量を飼料Bの高さHqにより検出する。この検出結果は、センサシステムコントローラ72を経由して給餌機コントローラ本体部73に付与されるため、給餌機コントローラ本体部73は給餌時に収集する収集データとして管理データに追加する。そして、超音波センサ3sによる検出が終了したなら、管理データに基づく所定の給餌処理を行う(ステップS3,S4)。即ち、給餌量データに基づいて、粗飼料繰出コンベア機構28及び繰出オーガ機構30を制御するとともに、不図示の計量機構を制御する。なお、この計量機構は飼料排出部24に付設されている。これにより、給餌量データに設定された粗飼料Baと配合飼料Bbの配合比及び配合量に調合した飼料Bを得るとともに、この飼料Bは飼料排出部24から外部の飼槽位置Xfに投与される。
【0044】
一方、自動給餌機2が飼槽位置Xfで停止したなら、第一赤外線センサ4xw及び第二赤外線センサ4ywによる牛体Cmに対するセンシング処理を行う(ステップS5)。このセンシング処理は、予め設定したリミット時間Tsの間は、第一赤外線センサ4xwが牛体Cmを検出するまで継続する(ステップS6,S7)。このリミット時間Tsは、飼料Bを投与する給餌処理が終了した後の所定時間を設定できる。この第一赤外線センサ4xw及び第二赤外線センサ4ywによる検出結果は、センサシステムコントローラ72を経由して給餌機コントローラ本体部73に付与されるため、給餌機コントローラ本体部73は給餌時に収集する収集データとして管理データに追加する。これにより、管理データに対してデータ内容が追加された被管理データが得られるため、この被管理データは一頭毎に給餌機コントローラ本体部73に保存される。
【0045】
そして、以上の給餌処理が終了したなら、自動給餌機2は次のストールAcの飼槽位置Xfへ自動で移動するとともに、次の飼槽位置Xfにおいても上述した検出処理及び給餌処理を同様に実行する(ステップS8,S1…)。また、全ての乳牛C…に対する給餌処理が終了すれば、自動給餌機2は、ホームポジションまで自動で戻り、給餌機コントローラ本体部73に保存された被管理データは管理コントローラ93に送信される。この後、給餌システムShは、次の給餌回(給餌時刻)まで待機する(ステップS8)。
【0046】
他方、管理コントローラ91は、給餌機コントローラ本体部73から被管理データを受信すれば、この被管理データを利用して新たな管理データを作成する。この際、被管理データが、清掃後に行った給餌のように、前回の食べ残しが無いときの給餌(初回給餌)の場合には、超音波センサ3sによる残量Qrの検出結果をキャンセルする(ステップS9,S10)。これに対して、前回の食べ残しが存在するときのデータの場合には、超音波センサ3sによる残量Qrの検出結果を前回分として前回の管理データ分に組み入れる(ステップS9,S11)。したがって、初回給餌が行われる前の給餌では、残量Qrの検出結果を収集できなくなるため、この場合には、一定時間経過後、自動給餌機2を超音波センサ3sによる検出のみを目的として各ストールAc…を移動させてもよいし、この回の検出結果は除いてもよい。
【0047】
そして、新たな管理データが得られたなら更新を行うとともに、健康状態判別機能Fpにより、得られた検出結果に対するランク分け処理を行う(ステップS12)。この場合、前述した図8(a)のランク分け基準に従って、超音波センサ3sによる飼槽位置Xfにおける残量Qrの検出結果を三段階にランク分けする。即ち、残量Qrが30mm以下の少量レベルのときは被判別要素Da、残量Qrが31〜74mmの中量レベルのときは被判別要素Db、残量Qrが75mm以上のときは被判別要素Dcにそれぞれランク分けする。また、前述した図8(b)のランク分け基準に従って、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果を三段階にランク分けする。即ち、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方、又は第一赤外線センサ4xwのみが牛体Cmを検出したときは被判別要素Dx、第二赤外線センサ4ywのみが牛体Cmを検出したときは被判別要素Dy、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方による検出が無いときは被判別要素Dzにランク分けする。
【0048】
次いで、ランク分けした各被判別要素Da,Db,Dc,Dx,Dy,Dzから乳牛Cに対する健康状態の判別処理を行う(ステップS13)。即ち、前述したように、例示の場合、一日、六回の給餌において、被判別要素Db又はDcを得、かつ、被判別要素Dy又はDzを得ること(ただし、初回給餌の場合は、被判別要素Db又はDcを得ること)が三回以上発生することを判別条件として設定するため、この判別条件を満たしている乳牛Cは、健康状態に問題がある不良牛として判別し、この判別条件を満たさない乳牛Cは、健康状態に問題はない良牛として判別する。そして、判別処理の結果は、判別結果(判別データ)Duとして記録する。
【0049】
さらに、健康状態表示機能Fdにより、得られた各データに対する表示処理を行う(ステップS14)。この場合、得られたデータには、残量Qrの検出結果に対するランク分けによる被判別要素Da…,Db…,Dc…、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpによる判別結果Du、更に、これらに対して他のモニタリングデータ、例えば、乳量データ,給餌量データ,サイレージ量データ,濃厚飼料量データ,病気治療データ等を加え、図10及び図11に示すフォーマットによりディスプレイ部94に表示する。
【0050】
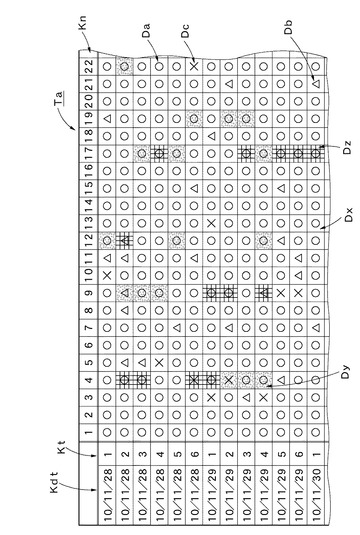
図10は、全乳牛C…における各給餌回に対する被判別要素Da…,Db…,Dc…,Dx…,Dy…,Dz…、特に、異なる情報となる被判別要素Da…,Db…,Dc…と、被判別要素Dx…,Dy…,Dz…とを重畳させた表Taを示す。なお、表Ta中、Kdtは給餌日、Ktは給餌日における給餌回、Knは牛番をそれぞれ示す。このような表Taを用いれば、全乳牛C…の健康状態を牧場全体として総合的に管理できるため、健康状態の悪い乳牛C…を容易に見つけだすことができるとともに、牧場全体の牛群の飼養管理が適切に行われているかの判断材料として活用できる。例えば、特定のエリアにおける乳牛C…の健康状態が悪い場合には、何らかの伝染性病気の発生,風の吹き込み,猛暑等による飼育環境の悪化が考えられるため、これらの原因を早期に発見し、必要な対策を速やかに講じることができる。
【0051】
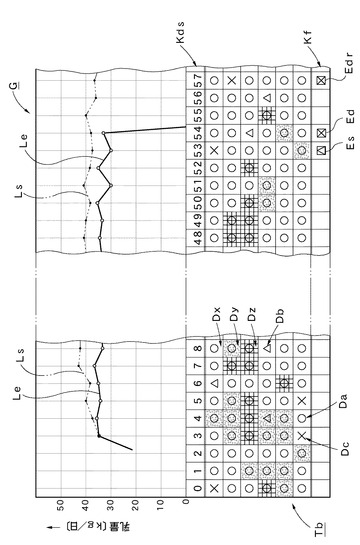
図11は、特定の乳牛Cの分娩日後の日数に対する被判別要素Da…,Db…,Dc…,Dx…,Dy…,Dz…、を表Tbで示すとともに、乳量〔kg/日〕の変化をグラフGで示す。なお、表Tb中、Kdsは0を分娩日としたときの経過日数、Kfは病気治療欄であり、Esは異変発見日、Edは一回目治療日、Edrは二回目治療日をそれぞれ示す。また、グラフG中、Leは乳量の変化、Lsは健康な乳牛の平均的な乳量の変化を参考例として示す。図11中、55日目以降は乳量が0になるが、一回目の治療により乳房炎と診断され、バケットでの別搾乳となったためである。このような表Tb及びグラフGを用いれば、個々の乳牛C…の健康状態を把握するための判断材料として活用できる。例えば、分娩のあった特定の乳牛Cに対する健康状態及びその変化状態(経過状態)等を目視により容易かつ明確に把握し、総合的に管理できるため、分娩後の健康状態が思わしくないと事前に判断した乳牛Cに対して多面的に監視することにより、乳房炎等の疾病を早期に発見できるとともに、必要な対策を速やかに講じることができる。この表Tb及びグラフGもディスプレイ部94の画面に表示される。
【0052】
よって、このような本実施形態に係る乳牛の健康状態管理方法及び管理システム1によれば、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理するようにしたため、健康状態に対する誤判別の確率を大幅に低減し、乳牛C…の健康状態を的確に管理することができる。しかも、従来に比べ、乳牛C…に取付けるICタグが不要になるため、乳牛C…における無用なストレス要因の一つを解消できるとともに、システムのコスト低減にも寄与できる。また、自動給餌機2に付設した餌量検出センサ部3により、飼槽位置Xf…における飼料B…の残量Qrを検出するため、乳牛C…の食欲を直接的に検出できる。したがって、乳牛C…の行動に係わる情報と併せ、健康状態を示す複数の多面的な情報を得ることが可能となり、乳牛C…の健康や疾病等をより早くより的確に把握することができる。
【0053】
以上、好適実施形態について詳細に説明したが、本発明は、このような実施形態に限定されるものではなく、細部の構成,形状,素材,数量,数値,手法等において、本発明の要旨を逸脱しない範囲で、任意に変更,追加,削除することができる。
【0054】
例えば、餌量センサ部3は、飼料Bの量(残量Qr)を検出できればよいため、例示した超音波センサ3s等の測距センサの他に、重量計による重量検出,CCD等のイメージセンサ(撮像手段)を用いた画像処理により得られる体積検出等によっても可能である。また、反射型の超音波センサ3s…を複数の高さに配し、水平方向に超音波を投射することによっても検出可能である。さらに、超音波センサ3sにより検出する際に、超音波センサ3sの位置を若干移動させることにより複数位置を検出し、検出結果を平均値で求めてもよい。一方、牛体検出センサ部4には、焦電型の赤外線センサ4x,4yを用いた例を挙げたが、判別条件などを考慮して他の各種センシング手段、例えば、超音波センサ,光学センサ,CCD等のイメージセンサも利用可能である。特に、CCD等のイメージセンサを利用した場合には、牛体検出センサ部4と餌量センサ部3の双方を兼用できる利点がある。また、健康状態に問題がある不良牛と判定された牛について、CCD等のイメージセンサで取得した画像データを保存し、管理コントローラ91のディスプレイ94でその牛の画像データを見ることができるようにすれば、画像データも更に有効な情報として利用できる。
【産業上の利用可能性】
【0055】
本発明に係る乳牛の健康状態管理方法及び管理システム1は、ストールに繋留された乳牛をはじめ、豚や馬等のストールに繋留された各種の動物の健康状態管理方法及び管理システム1として利用することができる。したがって、本発明における乳牛は一般的な牛の概念みならず各種動物を含む概念である。
【符号の説明】
【0056】
1:健康状態管理システム,2:自動給餌機,3:餌量検出センサ部,3s:超音波センサ,4:牛体検出センサ部,4x:牛体検出センサ,4y:牛体検出センサ,4xw:赤外線センサ,4yw:赤外線センサ,5:健康状態管理手段,Ac…:ストール,B…:飼料,C…:乳牛,Cm:牛体,Da…,Db…,Dc…:被判別要素,Dx…,Dy…,Dz…:被判別要素,Du:判別結果,Fp:健康状態判別機能,Fd:健康状態表示機能,Px…:特定位置,Py…:特定位置,Xf…:飼槽位置,Qr…:残量,Hq…:飼料の高さ,Ta:表,Tb:表,G:グラフ
【技術分野】
【0001】
本発明は、ストールに繋留された乳牛の健康状態を管理する際に用いて好適な乳牛の健康状態管理方法及び管理システムに関する。
【背景技術】
【0002】
一般に、ストールに繋留される乳牛の健康管理は、疾病や体調不良の早期発見或いは飼養環境の早期改善などを行うことにより、乳牛の良好な健康状態を維持する上で重要である。特に、近年では乳牛の高泌乳化が進み、分娩後の負のエネルギバランスや暑熱などのストレスが乳牛への負担を増大させていることから、各乳牛毎の健康状態に対する的確かつ早期の把握がより重要性を増している。また、酪農家では、個体観察等により各乳牛の体調把握をしようと努めるが、近年の多頭数飼育に伴い、繋ぎ飼い方式であっても十分な把握は容易でないのが実状である。
【0003】
そこで、本出願人は、既に、このような乳牛の健康管理に用いて好適な乳牛の健康状態判別方法及び判別システムを特許文献1により提案した。同文献1に開示される乳牛の健康状態判別方法は、乳牛の健康状態を的確かつ早期に把握可能にするとともに、乳牛に対して無用なストレスを与えることがなく、かつ低コストの実施を目的としたものであり、具体的には、ストールに繋留された乳牛の健康状態を判別するに際し、予め、少なくとも、自動給餌機に設けることにより乳牛の牛番を検出する牛番検出センサの検出タイミングに係わる反応データと乳牛の存在を検出する牛体検出センサの検出タイミングに係わる反応データの一つ及び/又は組合わせに対する判別条件を設定するとともに、自動給餌機が任意のストールに移動して給餌を行う際に、牛番検出センサの検出タイミングに係わる反応データ及び牛体検出センサの検出タイミングに係わる反応データを検出し、検出した反応データと判別条件に基づいて乳牛の健康状態を判別処理するようにしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−207130号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述した従来における乳牛の健康状態判別方法及び判別システムは、次のような解決すべき課題も存在した。
【0006】
第一に、給餌時の採食反応(食欲)を把握する方法として、牛体検出センサにより牛体の動きを検出しているが、乳牛の性格(個性)によっては、採食反応と牛体の動きに相関を示さない場合がある。例えば、警戒心の強い乳牛の場合、自動給餌機により給餌を行っている際は、あまり餌に近付こうとせず、自動給餌機が次のストールに移動してから食べ始める乳牛も存在する。したがって、この場合、誤判別を生じる確率が高くなり、健康状態を正確かつ確実に判別する観点からは必ずしも十分であるとは言えなかった。
【0007】
第二に、乳牛の耳に取付けたICタグを読み取るための牛番検出センサに、乳牛の存在を検出する機能を兼用させている。したがって、乳牛に取付けるICタグが必要となり、乳牛に対するストレス要因及びコストアップ要因となる。しかも、牛体検出センサ及び牛番検出センサは、双方共に牛体の存在の有無を検出する目的で使用するため、得られる情報は限定される。結局、できるだけ多くの異なる情報を得ることにより、乳牛の健康や疾病等に係わる情報をより早くより的確に得る観点からは更なる改善の余地があった。
【0008】
本発明は、このような背景技術に存在する課題を解決した乳牛の健康状態管理方法及び管理システムの提供を目的とするものである。
【課題を解決するための手段】
【0009】
本発明に係る乳牛の健康状態管理方法は、上述した課題を解決するため、ストールAc…に繋留された乳牛C…の健康状態を管理するに際し、自動給餌機2に、ストールAc…の飼槽位置Xf…における飼料B…の量を検出可能な餌量検出センサ部3及びストールAc…の特定位置Px…,Py…における牛体Cm…の有無を検出する牛体検出センサ部4を付設し、所定の給餌時に自動給餌機2が各ストールAc…へ移動した際に、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理することを特徴とする。
【0010】
また、本発明に係る乳牛の健康状態管理システム1は、ストールAc…に繋留された乳牛C…の健康状態を管理するための健康状態管理システムを構成するに際して、自動給餌機2に付設することによりストールAc…の飼槽位置Xf…における飼料B…の残量Qr…を検出可能な餌量検出センサ部3と、自動給餌機2に付設することによりストールAc…の特定位置Px…,Py…における牛体Cm…の存在有無を検出する牛体検出センサ部4と、牛体検出センサ部4により検出した牛体Cm…の存在有無の検出結果と餌量検出センサ部3により検出した飼料B…の残量Qr…の検出結果に基づいて乳牛C…の健康状態を管理する健康状態管理手段5とを具備してなることを特徴とする。
【0011】
この場合、発明の好適な態様により、餌量検出センサ部3には、飼槽位置Xf…における飼料B…に対して上方に配することにより当該飼料B…の高さHq…を検出可能な反射型の超音波センサ3sを用いることができる。また、牛体検出センサ部4には、複数の異なる特定位置Px…,Py…における牛体Cm…の存在有無をそれぞれ検出可能な複数の牛体検出センサ4x,4y、望ましくは、動いている牛体Cm…を検知可能な焦電型の赤外線センサ4xw,4ywを用いることができる。一方、健康状態管理手段5には、残量Qr…の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素Da…,Db…,Dc…と、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能Fpを設けることができるとともに、さらに、当該残量Qr…の検出結果による被判別要素Da…,Db…,Dc…、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上を表Ta,Tb及び/又はグラフGにより時系列に表示する健康状態表示機能Fdを設けることができる。
【発明の効果】
【0012】
このような本発明に係る乳牛の健康状態管理方法及び管理システム1によれば、次のような顕著な効果を奏する。
【0013】
(1) 餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理するようにしたため、健康状態に対する誤判別の確率を大幅に低減し、乳牛C…の健康状態を的確に管理することができる。
【0014】
(2) 乳牛C…に取付けるICタグが不要になるため、乳牛C…における無用なストレス要因の一つを解消できるとともに、システムのコスト低減にも寄与できる。また、自動給餌機2に付設した餌量検出センサ部3により、飼槽位置Xf…における飼料B…の残量Qrを検出するため、乳牛C…の食欲を直接的に検出できる。したがって、乳牛C…の行動に係わる情報と併せ、健康状態を示す複数の多面的な情報を得ることが可能となり、乳牛C…の健康や疾病等をより早くより的確に把握することができる。
【0015】
(3) 好適な態様により、餌量検出センサ部3に、飼槽位置Xf…における飼料B…に対して上方に配することにより当該飼料B…の高さHq…を検出可能な反射型の超音波センサ3sを用いれば、飼料B…の量(残量Qr)を、飼料B…の高さHq…により容易に検出できるとともに、比較的汎用的なセンサの利用により低コストに実施できる。
【0016】
(4) 好適な態様により、牛体検出センサ部4に、複数の異なる特定位置Px…,Py…における牛体Cm…の存在有無をそれぞれ検出可能な複数の牛体検出センサ4x,4yを用いれば、乳牛C…の行動に係わる多様化した情報を得れるため、乳牛C…の健康状態をより的確に判別できる。
【0017】
(5) 好適な態様により、牛体検出センサ4x,4yに、動いている牛体Cm…を検知可能な焦電型の赤外線センサ4xw,4ywを用いれば、通常、自動給餌機2により給餌を行う際に使用する、乳牛C…の存在を確認するセンサと兼用できるとともに、ストールAc…等の固定障害物に左右されることなく、動きのある乳牛C…のみを確実に検出できる。
【0018】
(6) 好適な態様により、健康状態管理手段5に、残量Qr…の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素Da…と、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能Fpを設ければ、健康状態を判別するための情報数及びその組合せ数をより多くできるため、健康状態に対する判別結果の的確性及び信頼性をより高めることができる。
【0019】
(7) 好適な態様により、健康状態判別手段5に、残量Qr…の検出結果による被判別要素Da…、複数の牛体検出センサ4x,4yの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上を表Ta,Tb及び/又はグラフGにより時系列に表示する健康状態表示機能Fdを設ければ、牧場全体の牛群の飼養管理が適切に行われているかの判断材料或いは各乳牛C…の健康状態を把握するための判断材料として活用できるとともに、目視により、乳牛C…の健康状態及びその変化状態(経過状態)等を容易かつ明確に知ることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の好適実施形態に係る乳牛の健康状態管理方法の処理手順を説明するためのフローチャート、
【図2】本発明の好適実施形態に係る乳牛の健康状態管理システムを実施できる繋留牛舎における内部のレイアウト構成を示す平面概略図、
【図3】同健康状態管理システムに用いる餌量検出センサ部及び牛体検出センサ部と乳牛の位置関係を示す説明図、
【図4】同繋留牛舎に備える給餌システムにおける自動給餌機の内部構造図、
【図5】同繋留牛舎の一部であって搾乳システムの一部を示す側面構成図、
【図6】同健康状態管理システムに用いる超音波センサの計測値と残量高さのスケール実測値の相関図、
【図7】同健康状態管理システムを含む乳牛飼養管理システムの全体構成を示すブロック系統図、
【図8】同健康状態管理方法により得られる検出結果から被判別要素をランク分けするための説明図、
【図9】同健康状態管理方法により得られる被判別要素から健康状態を判別する判別条件及び判別結果の説明図、
【図10】同健康状態管理システムの健康状態管理手段における健康状態表示機能により表示する給餌回に対する被判別要素表、
【図11】同健康状態表示機能により表示する特定の乳牛の分娩日後の経過日数に対する被判別要素表及び乳量変化グラフ、
【発明を実施するための形態】
【0021】
次に、本発明に係る好適実施形態を挙げ、図面に基づき詳細に説明する。
【0022】
まず、本発明の理解を容易にするため、繋留牛舎の全体構成について、図2〜図5を参照して説明する。
【0023】
図2は、繋留牛舎Mの内部における概要を示す。この繋留牛舎Mには多数のストールAc…が配列するストール群Aが設置され、各ストールAc…に乳牛C…が係留されている。そして、このストール群Aの上方に、ストール群Aに沿った搾乳システムSmが設置されるとともに、このストール群Aの前方に、ストール群Aに沿った給餌システムShが設置される。
【0024】
給餌システムShは、ストール群Aの前上方に配したガイドレール部21と、このガイドレール部21に沿って移動する自動給餌機2を備える。この自動給餌機2は、図3及び図4に示すように、ガイドレール部21に装填した自走式の移動部22と、この移動部22に吊下げられた給餌機本体23を備える。給餌機本体23は、底部に飼料排出部24を有する飼料ケース部25を備える。飼料ケース部25は、粗飼料Baを収容する粗飼料収容部26と配合飼料Bbを収容する配合飼料収容部27を有する。そして、粗飼料収容部26の内部には、粗飼料繰出コンベア機構28及び繰出量を安定化させるビータ機構29を配設するとともに、配合飼料収容部27の内部には、スクリュ式の繰出オーガ機構30を配設する。
【0025】
また、飼料ケース部25の外側面にはコントローラ部31を配設するとともに、飼料ケース部25の下面にはバッテリを収容したバッテリボックス32を配設する。上述した移動部22は駆動モータを用いた駆動部33を搭載し、この駆動部33はコントローラ部31により駆動制御される。なお、移動部22の停止や移動方向の制御は、移動部22に設けた検出部(検出センサ)35が、ガイドレール部21の所定位置に設けた被検出部34…を検出することにより行われる。このような給餌システムShの構成により、各ストールAc…に対して自動給餌機2を自動で移動させ、各飼槽位置Hf…に、粗飼料Baと配合飼料Bbが配合された飼料Bを投与(給餌)することができる。
【0026】
一方、搾乳システムSmは、ストール群Aの上方に配したガイドレール部41を備える。ガイドレール部41は、ストール群Aに沿って配した主レール41mと、この主レール41mの中途位置から直角方向に分岐し、かつストールAc…間に配した複数の分岐レール41s…を備える。この場合、分岐レール41s…は、配列するストールAc…に対して一つ置き、即ち、相隣る分岐レール41sと41s…間に二つのストールAc…が入るように配する。また、分岐レール41s…の先端前方には、図5に示すミルクライン42及び真空ライン43を配置する。ミルクライン42及び真空ライン43はストール群Aに沿って配し、各分岐レール41s…に対向する位置には、後述するディストリビュータ48を接続するミルクタップ42t…を付設する。
【0027】
さらに、搾乳システムSmには、ガイドレール部41に沿って移動する一台又は二台以上の搾乳機44…を備える。搾乳機44は、ガイドレール部41に装填した自走式の移動部45と、この移動部45に搭載したコントローラ部46と、移動部45の両側に吊下げた左右一対の搾乳ユニット47p,47qと、移動部45の先端に設けたディストリビュータ48を備える。この場合、移動部45には駆動モータを用いた駆動部49を搭載し、この駆動部49はバッテリを内蔵するコントローラ部46により駆動制御される。なお、移動部45の停止や移動方向の制御は、移動部45に設けた検出部(検出センサ)がガイドレール部41の所定位置に配した被検出部を検出することにより行われる。搾乳ユニット47p(47qも同じ)は、パルセータや自動離脱装置等を含むユニット本体50と、乳牛Cの各乳房Cb…に装着する四つのティートカップ51…と、ミルククロー52を備え、ミルクチューブにより、ティートカップ51…とミルククロー52とユニット本体50とディストリビュータ48間を接続するとともに、真空チューブにより、ティートカップ51…とユニット本体50とディストリビュータ48間を接続する。また、ミルククロー52とユニット本体50は離脱用ワイヤ53により接続する。このような搾乳システムSmの構成により、各ストールAc…に対して搾乳機44を自動で移動させて搾乳を行うことができる。
【0028】
次に、本実施形態に係る乳牛の健康状態管理システム1を含む全体の制御系(電気系)の構成について、図2〜図7を参照して説明する。
【0029】
図7に示すように、給餌システムShにおける自動給餌機2には、給餌機コントローラ71を搭載する。給餌機コントローラ71は、給餌機コントローラ本体部73を備えるとともに、この給餌機コントローラ本体部73に接続した無線通信部74を備える。給餌機コントローラ本体部73は、コンピュータ機能を備え、メモリに格納した処理プログラムに基づく一連の制御処理(シーケンス制御処理)をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。この場合、給餌機コントローラ本体部73及び無線通信部74は、図4に示すコントローラ部31に内蔵する。
【0030】
また、自動給餌機2には、図3及び図4に示すように、餌量検出センサ部3と牛体検出センサ部4を付設し、それぞれセンサシステムコントローラ72に接続するとともに、このセンサシステムコントローラ72は給餌機コントローラ本体部73に接続する。この場合、餌量検出センサ部3は、ストールAcの飼槽位置Xfにおける飼料B(残量Qr)の高さHqを検出可能に配設する。例示の餌量検出センサ部3は、飼槽位置Xfにおける飼料Bに対して上方に配することにより当該飼料Bの高さHqを検出可能な測距センサである反射型の超音波センサ3sを用いる。この超音波センサ3sは、自動給餌機2の外面であって、ストールAcに対する対向面に配設する。このため、自動給餌機2の外面にステー75を取付け、このステー75の先端に超音波センサ3sを取付ける。このようなステー75を利用すれば、ステー75の長さや形状等を変えることにより超音波センサ3sの最適位置を設定できる。これにより、超音波センサ3sからの超音波は、下方における飼槽位置Xfに投与された飼料Bの略中央付近に投射される。
【0031】
このように、餌量検出センサ部3として、飼槽位置Xfにおける飼料Bに対して上方に配することにより当該飼料Bの高さHqを検出可能な反射型の超音波センサ3sを用いれば、飼料Bの量(残量Qr)を、飼料Bの高さHqにより容易に検出できるとともに、比較的汎用的なセンサの利用により低コストに実施できる利点がある。なお、図6は、残量Qrの高さHqのスケール実測値〔mm〕と超音波センサ3sの実際の計測値〔mm〕の相関図を示す。図6から明らかなように、超音波センサ3sを用いた場合であっても、概ね実測値に近い値を示している。残量Qrの検出結果に対しては、後述するように、少量レベル(30mm以下),中間量レベル(31〜74mm),多量レベル(75mm以上)の三つのランクにランク分けするため、実測する絶対値としての正確性はさほど重要ではない。したがって、図6に示す結果であっても十分に実用可能となる。
【0032】
一方、牛体検出センサ部4は、ストールAcの特定位置Px,Pyにおける牛体Cmの有無を検出可能に配設する。牛体検出センサ部4は、二つの異なる特定位置Px,Pyにおける牛体Cmの存在有無をそれぞれ検出可能な二つの牛体検出センサ4x,4yを備える。各牛体検出センサ4x,4yには、動いている牛体Cmを検知可能な焦電型の赤外線センサ4xw,4yw、即ち、第一赤外線センサ4xwと第二赤外線センサ4ywを用いる。各赤外線センサ4xw,4ywは、図3に示すように、飼料ケース部25の外面であって、ストールAcに対する対向面の上部位置に横方に並べて配設する。この場合、図3に示すように、第一赤外線センサ4xwの検出エリアAxは、特定位置Pxを含み、この特定位置Pxは飼槽位置Xfとなる。また、第二赤外線センサ4ywの検出エリアAyは、特定位置Pyを含み、この特定位置PyはストールAcの内部位置となる。なお、焦電型の赤外線センサ4xw,4ywは、センサ視野内で牛体Cmが動いたときに生じる赤外線エネルギ量の分布変化を検出する機能を備える。このため、動かない物体であるストールAcのポールやネックレール等の固定障害物に影響を受けないとともに、動かない牛体Cm(乳牛C)も検出しない。例示する赤外線センサ4xw,4ywの検出可能範囲は概ね2〔m〕程度である。
【0033】
第一赤外線センサ4xwと第二赤外線センサ4ywを、このような配置構成とすれば、第一赤外線センサ4xwにより、飼槽位置Xf(特定位置Px)に頭を出して飼料Bを採食する牛体Cmの存在有無を検出できるとともに、第二赤外線センサ4ywにより、ストールAcの内部における牛体Cmの存在有無を検出できる。このように、牛体検出センサ部4に、二つ(一般的には複数)の異なる特定位置Px,Pyにおける牛体Cmの存在有無をそれぞれ検出する複数の牛体検出センサ4x,4yを用いれば、乳牛Cの行動に係わる多様化した情報を得れるため、乳牛C…の健康状態をより的確に判別できる利点がある。特に、牛体検出センサ4x,4yとして、動いている牛体Cmを検知する焦電型の赤外線センサ4xw,4ywを用いたため、通常、自動給餌機2によって給餌を行う際に使用する、乳牛Cの存在を確認するセンサと兼用できるとともに、ストールAc…等の固定障害物に左右されることなく、動きのある乳牛Cのみを確実に検出できる利点がある。
【0034】
他方、搾乳システムSmの搾乳機44には、搾乳機コントローラ81を搭載する。搾乳機コントローラ81は、搾乳機コントローラ本体部82を備えるとともに、この搾乳機コントローラ本体部82に接続した、無線通信部83,乳量センサ84及び乳汁センサ85を備える。搾乳機コントローラ本体部82は、コンピュータ機能を備え、メモリに格納した処理プログラムに基づく一連の制御処理(シーケンス制御処理)をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。この場合、搾乳機コントローラ本体部82及び無線通信部83は、図5に示す搾乳機コントローラ81に内蔵するとともに、乳量センサ84…及び乳汁センサ85…は、各搾乳ユニット47p…(47q…)におけるユニット本体50…に内蔵する。乳量センサ84は搾乳時の乳量を検出する機能を有するとともに、乳汁センサ85は搾乳した乳汁の品質を検査する機能を有する。なお、この乳汁センサ85には乳汁の品質(特性)が正常か否かを検出する様々なセンサを適用できる。また、88は表示部を示す。
【0035】
さらに、繋留牛舎Mの内部又は外部には管理室Rcを設け、この管理室Rcの内部に管理コントローラ91を設置する。管理コントローラ91は、図2に示すように、汎用コンピュータシステム92により構成できる。汎用コンピュータシステム92は、コンピュータ本体部93と、このコンピュータ本体部93に接続したディスプレイ94,入出力部95及び無線通信部96を備える。コンピュータ本体部93は、CPU(処理部)93s,データメモリ93d及びプログラムメモリ93p等を含むコンピュータ機能を備え、プログラムメモリ93pに格納した処理プログラムに基づく各種管理処理をはじめ、演算処理,記憶処理,通信処理及び入出力処理等の各種データ処理(コンピューティング処理)を実行する。ディスプレイ94は、カラー液晶ディスプレイ等を利用できるとともに、入出力部95には、外部メディア用ドライブ,キーボードやマウス等の入力部、及びプリンタ等の出力部を含む。管理コントローラ91は、無線通信部96及び無線通信部74を介して給餌機コントローラ本体部73と相互通信できるとともに、無線通信部96及び無線通信部83を介して搾乳機コントローラ本体部82と相互通信できる。さらに、管理コントローラ91は、PDA等のモバイルコンピューティング装置や携帯電話等を含むモバイル端末装置Scに対して相互通信できる。したがって、管理コントローラ91は、データ通信機能Ft,データ管理機能Fc及びデータ演算機能Fcmを含む。
【0036】
また、管理コントローラ91は、乳牛Cの健康状態を管理する健康状態管理手段5を備えるとともに、この健康状態管理手段5は、さらに、健康状態判別機能Fpと健康状態表示機能Fdを備える。したがって、健康状態判別機能Fpは、コンピュータ本体部93により実行されるとともに、健康状態表示機能Fdは、コンピュータ本体部93及びディスプレイ94により実行される。
【0037】
健康状態判別機能Fpは、餌量検出センサ部3、即ち、超音波センサ3sにより検出した飼料Bの残量Qrの検出結果と、牛体検出センサ部4、即ち、第一赤外線センサ4xw及び第二赤外線センサ4ywにより検出した牛体Cmの存在有無の検出結果に基づいて乳牛Cの健康状態を判別する機能を備える。具体的には、飼料Bの残量Qrの検出結果を三つ(一般的には複数)のランクにランク分けし、このランク分けによる被判別要素Da,Db,Dcと、二つの牛体検出センサ4x,4y、即ち、第一赤外線センサ4xwと第二赤外線センサ4ywの検出結果による被判別要素Dx,Dy,Dzとの組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する機能を備える。
【0038】
この場合、残量Qrの検出結果に対するランク分けは、図8(a)に示すように、残量Qrが30mm以下の少量レベルの場合、食欲旺盛と判断する被判別要素Daとし、残量Qrが31〜74mmの中量レベルの場合、食欲が少し無いと判断する被判別要素Dbとし、残量Qrが75mm以上の多量レベルの場合、食欲がほとんど無いと判断する被判別要素Dcとする。なお、これらの被判別要素Da,Db,Dcを表示する場合のマークを図8(a)に示す。一方、第一赤外線センサ4xw及び第二赤外線センサ4ywにより検出した牛体Cmの存在有無の検出結果に対するランク分けは、図8(b)に示すように、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方、又は第一赤外線センサ4xwのみが牛体Cmを検出する場合、牛体Cmは飼槽位置Xfに頭を出して採食状態にあったものと判断する被判別要素Dxとし、第二赤外線センサ4ywのみが牛体Cmを検出する場合、牛体Cmは牛床内では動いたが飼槽位置Xfに頭を出して採食状態にはなかったものと判断する被判別要素Dyとし、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方による検出が無い場合、牛体Cmの動きは無いものと判断する被判別要素Dzとする。なお、これらの被判別要素Dx,Dy,Dzを表示する場合のマークを図8(b)に示す。
【0039】
そして、判別条件は、例示の場合、一日、六回の給餌において、図8(a)によりランク分けした残飼ランクが、被判別要素Db又はDcであること、かつ図8(b)によりランク分けした採食反応ランクが、被判別要素Dy又はDzであること(ただし、初回給餌の場合は、被判別要素Db又はDcであること)が三回以上発生することを条件として設定し、この判別条件を満たす場合には、健康状態に問題がある不良牛として判別する。したがって、この判別条件を満たさなければ、健康状態が良好な良牛と判別する。図9は、以上の判別条件を適用して判別した五頭の乳牛C…の例を示し、Knは牛番(番号1〜5)、Ktは給餌回(1〜6回目)、Duは判別結果を示す。健康状態管理手段5に、このような健康状態判別機能Fpを設ければ、健康状態を判別するための情報数及びその組合せ数をより多くできるため、健康状態に対する判別結果の的確性及び信頼性をより高めることができる。
【0040】
一方、健康状態表示機能Fdは、残量Qrの検出結果に対するランク分けによる被判別要素Da…,Db…,Dc…、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpの判別結果Du、の少なくとも一つ以上、更には、これらに対して他のモニタリングデータを加え、表Ta,Tb(図10,図11)及び/又はグラフG(図11)により時系列に表示する機能を備える。このような健康状態表示機能Fdを設ければ、牧場全体の牛群の飼養管理が適切に行われているかの判断材料或いは各乳牛C…の健康状態を把握するための判断材料として活用できるとともに、目視により、乳牛C…の健康状態及びその変化状態(経過状態)等を容易かつ明確に知ることができる。したがって、管理コントローラ91のプログラムメモリ93pには、このような健康状態判別機能Fpに基づく判別処理及び健康状態表示機能Fdに基づく表示処理を実行するための処理プログラムが格納されている。
【0041】
次に、本実施形態に係る健康状態管理方法を含む健康状態管理システム1の動作(機能)について、図2〜図11を参照しつつ図1に示すフローチャートに従って説明する。
【0042】
今、給餌システムShにおいて、自動給餌機2はホームポジョンに停止し、待機中にあるものとする。待機中において、給餌開始時刻になれば、給餌機コントローラ本体部73は、管理コントローラ91から管理データを受信し、この管理データに基づいて給餌工程を行う。この管理データには、全ての乳牛C…の牛番,各牛番に対応する牛床番号及び給餌量データ等が含まれており、管理データを受信したなら給餌機コントローラ本体部73に登録されている前回の給餌時に使用した管理データの更新を行う。
【0043】
管理データを更新したなら給餌工程を開始する。給餌工程の開始により自動給餌機2はガイドレール部21に沿って自動で移動する(ステップS1)。移動中に、自動給餌機2の検出部35が被検出部34を検出する飼槽位置Xfに達すれば、その飼槽位置Xfで停止する(ステップS2)。停止したなら、まず、超音波センサ3s(餌量検出センサ部3)により飼料Bの残量Qrの検出、即ち、飼料Bの食べ残し(残飼)の量を飼料Bの高さHqにより検出する。この検出結果は、センサシステムコントローラ72を経由して給餌機コントローラ本体部73に付与されるため、給餌機コントローラ本体部73は給餌時に収集する収集データとして管理データに追加する。そして、超音波センサ3sによる検出が終了したなら、管理データに基づく所定の給餌処理を行う(ステップS3,S4)。即ち、給餌量データに基づいて、粗飼料繰出コンベア機構28及び繰出オーガ機構30を制御するとともに、不図示の計量機構を制御する。なお、この計量機構は飼料排出部24に付設されている。これにより、給餌量データに設定された粗飼料Baと配合飼料Bbの配合比及び配合量に調合した飼料Bを得るとともに、この飼料Bは飼料排出部24から外部の飼槽位置Xfに投与される。
【0044】
一方、自動給餌機2が飼槽位置Xfで停止したなら、第一赤外線センサ4xw及び第二赤外線センサ4ywによる牛体Cmに対するセンシング処理を行う(ステップS5)。このセンシング処理は、予め設定したリミット時間Tsの間は、第一赤外線センサ4xwが牛体Cmを検出するまで継続する(ステップS6,S7)。このリミット時間Tsは、飼料Bを投与する給餌処理が終了した後の所定時間を設定できる。この第一赤外線センサ4xw及び第二赤外線センサ4ywによる検出結果は、センサシステムコントローラ72を経由して給餌機コントローラ本体部73に付与されるため、給餌機コントローラ本体部73は給餌時に収集する収集データとして管理データに追加する。これにより、管理データに対してデータ内容が追加された被管理データが得られるため、この被管理データは一頭毎に給餌機コントローラ本体部73に保存される。
【0045】
そして、以上の給餌処理が終了したなら、自動給餌機2は次のストールAcの飼槽位置Xfへ自動で移動するとともに、次の飼槽位置Xfにおいても上述した検出処理及び給餌処理を同様に実行する(ステップS8,S1…)。また、全ての乳牛C…に対する給餌処理が終了すれば、自動給餌機2は、ホームポジションまで自動で戻り、給餌機コントローラ本体部73に保存された被管理データは管理コントローラ93に送信される。この後、給餌システムShは、次の給餌回(給餌時刻)まで待機する(ステップS8)。
【0046】
他方、管理コントローラ91は、給餌機コントローラ本体部73から被管理データを受信すれば、この被管理データを利用して新たな管理データを作成する。この際、被管理データが、清掃後に行った給餌のように、前回の食べ残しが無いときの給餌(初回給餌)の場合には、超音波センサ3sによる残量Qrの検出結果をキャンセルする(ステップS9,S10)。これに対して、前回の食べ残しが存在するときのデータの場合には、超音波センサ3sによる残量Qrの検出結果を前回分として前回の管理データ分に組み入れる(ステップS9,S11)。したがって、初回給餌が行われる前の給餌では、残量Qrの検出結果を収集できなくなるため、この場合には、一定時間経過後、自動給餌機2を超音波センサ3sによる検出のみを目的として各ストールAc…を移動させてもよいし、この回の検出結果は除いてもよい。
【0047】
そして、新たな管理データが得られたなら更新を行うとともに、健康状態判別機能Fpにより、得られた検出結果に対するランク分け処理を行う(ステップS12)。この場合、前述した図8(a)のランク分け基準に従って、超音波センサ3sによる飼槽位置Xfにおける残量Qrの検出結果を三段階にランク分けする。即ち、残量Qrが30mm以下の少量レベルのときは被判別要素Da、残量Qrが31〜74mmの中量レベルのときは被判別要素Db、残量Qrが75mm以上のときは被判別要素Dcにそれぞれランク分けする。また、前述した図8(b)のランク分け基準に従って、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果を三段階にランク分けする。即ち、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方、又は第一赤外線センサ4xwのみが牛体Cmを検出したときは被判別要素Dx、第二赤外線センサ4ywのみが牛体Cmを検出したときは被判別要素Dy、第一赤外線センサ4xw及び第二赤外線センサ4ywの双方による検出が無いときは被判別要素Dzにランク分けする。
【0048】
次いで、ランク分けした各被判別要素Da,Db,Dc,Dx,Dy,Dzから乳牛Cに対する健康状態の判別処理を行う(ステップS13)。即ち、前述したように、例示の場合、一日、六回の給餌において、被判別要素Db又はDcを得、かつ、被判別要素Dy又はDzを得ること(ただし、初回給餌の場合は、被判別要素Db又はDcを得ること)が三回以上発生することを判別条件として設定するため、この判別条件を満たしている乳牛Cは、健康状態に問題がある不良牛として判別し、この判別条件を満たさない乳牛Cは、健康状態に問題はない良牛として判別する。そして、判別処理の結果は、判別結果(判別データ)Duとして記録する。
【0049】
さらに、健康状態表示機能Fdにより、得られた各データに対する表示処理を行う(ステップS14)。この場合、得られたデータには、残量Qrの検出結果に対するランク分けによる被判別要素Da…,Db…,Dc…、第一赤外線センサ4xw及び第二赤外線センサ4ywの検出結果による被判別要素Dx…,Dy…,Dz…、健康状態判別機能Fpによる判別結果Du、更に、これらに対して他のモニタリングデータ、例えば、乳量データ,給餌量データ,サイレージ量データ,濃厚飼料量データ,病気治療データ等を加え、図10及び図11に示すフォーマットによりディスプレイ部94に表示する。
【0050】
図10は、全乳牛C…における各給餌回に対する被判別要素Da…,Db…,Dc…,Dx…,Dy…,Dz…、特に、異なる情報となる被判別要素Da…,Db…,Dc…と、被判別要素Dx…,Dy…,Dz…とを重畳させた表Taを示す。なお、表Ta中、Kdtは給餌日、Ktは給餌日における給餌回、Knは牛番をそれぞれ示す。このような表Taを用いれば、全乳牛C…の健康状態を牧場全体として総合的に管理できるため、健康状態の悪い乳牛C…を容易に見つけだすことができるとともに、牧場全体の牛群の飼養管理が適切に行われているかの判断材料として活用できる。例えば、特定のエリアにおける乳牛C…の健康状態が悪い場合には、何らかの伝染性病気の発生,風の吹き込み,猛暑等による飼育環境の悪化が考えられるため、これらの原因を早期に発見し、必要な対策を速やかに講じることができる。
【0051】
図11は、特定の乳牛Cの分娩日後の日数に対する被判別要素Da…,Db…,Dc…,Dx…,Dy…,Dz…、を表Tbで示すとともに、乳量〔kg/日〕の変化をグラフGで示す。なお、表Tb中、Kdsは0を分娩日としたときの経過日数、Kfは病気治療欄であり、Esは異変発見日、Edは一回目治療日、Edrは二回目治療日をそれぞれ示す。また、グラフG中、Leは乳量の変化、Lsは健康な乳牛の平均的な乳量の変化を参考例として示す。図11中、55日目以降は乳量が0になるが、一回目の治療により乳房炎と診断され、バケットでの別搾乳となったためである。このような表Tb及びグラフGを用いれば、個々の乳牛C…の健康状態を把握するための判断材料として活用できる。例えば、分娩のあった特定の乳牛Cに対する健康状態及びその変化状態(経過状態)等を目視により容易かつ明確に把握し、総合的に管理できるため、分娩後の健康状態が思わしくないと事前に判断した乳牛Cに対して多面的に監視することにより、乳房炎等の疾病を早期に発見できるとともに、必要な対策を速やかに講じることができる。この表Tb及びグラフGもディスプレイ部94の画面に表示される。
【0052】
よって、このような本実施形態に係る乳牛の健康状態管理方法及び管理システム1によれば、餌量検出センサ部3により、前回の給餌時に投与した飼料B…の残量Qr…を検出し、この後、飼槽位置Xf…に飼料B…の投与を行うとともに、牛体検出センサ部4により、特定位置Px…,Py…における牛体Cm…の存在有無を検出し、当該存在有無の検出結果と残量Qr…の検出結果に基づいて、乳牛C…の健康状態を管理するようにしたため、健康状態に対する誤判別の確率を大幅に低減し、乳牛C…の健康状態を的確に管理することができる。しかも、従来に比べ、乳牛C…に取付けるICタグが不要になるため、乳牛C…における無用なストレス要因の一つを解消できるとともに、システムのコスト低減にも寄与できる。また、自動給餌機2に付設した餌量検出センサ部3により、飼槽位置Xf…における飼料B…の残量Qrを検出するため、乳牛C…の食欲を直接的に検出できる。したがって、乳牛C…の行動に係わる情報と併せ、健康状態を示す複数の多面的な情報を得ることが可能となり、乳牛C…の健康や疾病等をより早くより的確に把握することができる。
【0053】
以上、好適実施形態について詳細に説明したが、本発明は、このような実施形態に限定されるものではなく、細部の構成,形状,素材,数量,数値,手法等において、本発明の要旨を逸脱しない範囲で、任意に変更,追加,削除することができる。
【0054】
例えば、餌量センサ部3は、飼料Bの量(残量Qr)を検出できればよいため、例示した超音波センサ3s等の測距センサの他に、重量計による重量検出,CCD等のイメージセンサ(撮像手段)を用いた画像処理により得られる体積検出等によっても可能である。また、反射型の超音波センサ3s…を複数の高さに配し、水平方向に超音波を投射することによっても検出可能である。さらに、超音波センサ3sにより検出する際に、超音波センサ3sの位置を若干移動させることにより複数位置を検出し、検出結果を平均値で求めてもよい。一方、牛体検出センサ部4には、焦電型の赤外線センサ4x,4yを用いた例を挙げたが、判別条件などを考慮して他の各種センシング手段、例えば、超音波センサ,光学センサ,CCD等のイメージセンサも利用可能である。特に、CCD等のイメージセンサを利用した場合には、牛体検出センサ部4と餌量センサ部3の双方を兼用できる利点がある。また、健康状態に問題がある不良牛と判定された牛について、CCD等のイメージセンサで取得した画像データを保存し、管理コントローラ91のディスプレイ94でその牛の画像データを見ることができるようにすれば、画像データも更に有効な情報として利用できる。
【産業上の利用可能性】
【0055】
本発明に係る乳牛の健康状態管理方法及び管理システム1は、ストールに繋留された乳牛をはじめ、豚や馬等のストールに繋留された各種の動物の健康状態管理方法及び管理システム1として利用することができる。したがって、本発明における乳牛は一般的な牛の概念みならず各種動物を含む概念である。
【符号の説明】
【0056】
1:健康状態管理システム,2:自動給餌機,3:餌量検出センサ部,3s:超音波センサ,4:牛体検出センサ部,4x:牛体検出センサ,4y:牛体検出センサ,4xw:赤外線センサ,4yw:赤外線センサ,5:健康状態管理手段,Ac…:ストール,B…:飼料,C…:乳牛,Cm:牛体,Da…,Db…,Dc…:被判別要素,Dx…,Dy…,Dz…:被判別要素,Du:判別結果,Fp:健康状態判別機能,Fd:健康状態表示機能,Px…:特定位置,Py…:特定位置,Xf…:飼槽位置,Qr…:残量,Hq…:飼料の高さ,Ta:表,Tb:表,G:グラフ
【特許請求の範囲】
【請求項1】
ストールに繋留された乳牛の健康状態を管理するための乳牛の健康状態管理方法であって、自動給餌機に、前記ストールの飼槽位置における飼料の量を検出可能な餌量検出センサ部及び前記ストールの特定位置における牛体の有無を検出する牛体検出センサ部を付設し、所定の給餌時に前記自動給餌機が各ストールへ移動した際に、前記餌量検出センサ部により、前回の給餌時に投与した飼料の残量を検出し、この後、前記飼槽位置に飼料の投与を行うとともに、前記牛体検出センサ部により、前記特定位置における牛体の存在有無を検出し、当該存在有無の検出結果と前記残量の検出結果に基づいて、乳牛の健康状態を管理することを特徴とする乳牛の健康状態管理方法。
【請求項2】
前記牛体検出センサ部は、複数の異なる特定位置における牛体の存在有無をそれぞれ検出する複数の牛体検出センサを備えることを特徴とする請求項1記載の乳牛の健康状態管理方法。
【請求項3】
前記残量の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素と、前記複数の牛体検出センサの検出結果による被判別要素との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別することを特徴とする請求項1又は2記載の乳牛の健康状態管理方法。
【請求項4】
ストールに繋留された乳牛の健康状態を管理するための乳牛の健康状態管理システムであって、自動給餌機に付設することにより前記ストールの飼槽位置における飼料の残量を検出可能な餌量検出センサ部と、前記自動給餌機に付設することにより前記ストールの特定位置における牛体の存在有無を検出する牛体検出センサ部と、前記牛体検出センサ部により検出した牛体の存在有無の検出結果と前記餌量検出センサ部により検出した飼料の残量の検出結果に基づいて乳牛の健康状態を管理する健康状態管理手段とを具備してなることを特徴とする乳牛の健康状態管理システム。
【請求項5】
前記餌量検出センサ部は、前記飼槽位置における飼料に対して上方に配することにより当該飼料の高さを検出可能な反射型の超音波センサを用いることを特徴とする請求項4記載の乳牛の健康状態管理システム。
【請求項6】
前記牛体検出センサ部は、複数の異なる特定位置における牛体の存在有無をそれぞれ検出可能な複数の牛体検出センサを備えることを特徴とする請求項4又は5記載の乳牛の健康状態管理システム。
【請求項7】
前記牛体検出センサ部は、動いている牛体を検知可能な焦電型の赤外線センサを用いることを特徴とする請求項4〜6のいずれかに記載の乳牛の健康状態管理システム。
【請求項8】
前記健康状態管理手段は、前記残量の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素と、前記複数の牛体検出センサの検出結果による被判別要素との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能を備えることを特徴とする請求項4〜7のいずれかに記載の乳牛の健康状態管理システム。
【請求項9】
前記健康状態管理手段は、前記残量の検出結果による被判別要素,前記複数の牛体検出センサの検出結果による被判別要素,前記健康状態判別機能の判別結果,の少なくとも一つ以上を表及び/又はグラフにより時系列に表示する健康状態表示機能を備えることを特徴とする請求項8記載の乳牛の健康状態管理システム。
【請求項1】
ストールに繋留された乳牛の健康状態を管理するための乳牛の健康状態管理方法であって、自動給餌機に、前記ストールの飼槽位置における飼料の量を検出可能な餌量検出センサ部及び前記ストールの特定位置における牛体の有無を検出する牛体検出センサ部を付設し、所定の給餌時に前記自動給餌機が各ストールへ移動した際に、前記餌量検出センサ部により、前回の給餌時に投与した飼料の残量を検出し、この後、前記飼槽位置に飼料の投与を行うとともに、前記牛体検出センサ部により、前記特定位置における牛体の存在有無を検出し、当該存在有無の検出結果と前記残量の検出結果に基づいて、乳牛の健康状態を管理することを特徴とする乳牛の健康状態管理方法。
【請求項2】
前記牛体検出センサ部は、複数の異なる特定位置における牛体の存在有無をそれぞれ検出する複数の牛体検出センサを備えることを特徴とする請求項1記載の乳牛の健康状態管理方法。
【請求項3】
前記残量の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素と、前記複数の牛体検出センサの検出結果による被判別要素との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別することを特徴とする請求項1又は2記載の乳牛の健康状態管理方法。
【請求項4】
ストールに繋留された乳牛の健康状態を管理するための乳牛の健康状態管理システムであって、自動給餌機に付設することにより前記ストールの飼槽位置における飼料の残量を検出可能な餌量検出センサ部と、前記自動給餌機に付設することにより前記ストールの特定位置における牛体の存在有無を検出する牛体検出センサ部と、前記牛体検出センサ部により検出した牛体の存在有無の検出結果と前記餌量検出センサ部により検出した飼料の残量の検出結果に基づいて乳牛の健康状態を管理する健康状態管理手段とを具備してなることを特徴とする乳牛の健康状態管理システム。
【請求項5】
前記餌量検出センサ部は、前記飼槽位置における飼料に対して上方に配することにより当該飼料の高さを検出可能な反射型の超音波センサを用いることを特徴とする請求項4記載の乳牛の健康状態管理システム。
【請求項6】
前記牛体検出センサ部は、複数の異なる特定位置における牛体の存在有無をそれぞれ検出可能な複数の牛体検出センサを備えることを特徴とする請求項4又は5記載の乳牛の健康状態管理システム。
【請求項7】
前記牛体検出センサ部は、動いている牛体を検知可能な焦電型の赤外線センサを用いることを特徴とする請求項4〜6のいずれかに記載の乳牛の健康状態管理システム。
【請求項8】
前記健康状態管理手段は、前記残量の検出結果を複数のランクにランク分けし、このランク分けによる被判別要素と、前記複数の牛体検出センサの検出結果による被判別要素との組合わせが、予め設定した判別条件を満たすか否かにより乳牛の健康状態を判別する健康状態判別機能を備えることを特徴とする請求項4〜7のいずれかに記載の乳牛の健康状態管理システム。
【請求項9】
前記健康状態管理手段は、前記残量の検出結果による被判別要素,前記複数の牛体検出センサの検出結果による被判別要素,前記健康状態判別機能の判別結果,の少なくとも一つ以上を表及び/又はグラフにより時系列に表示する健康状態表示機能を備えることを特徴とする請求項8記載の乳牛の健康状態管理システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−205555(P2012−205555A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−74604(P2011−74604)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【出願人】(000103921)オリオン機械株式会社 (450)
【出願人】(000237824)富士平工業株式会社 (14)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【出願人】(000103921)オリオン機械株式会社 (450)
【出願人】(000237824)富士平工業株式会社 (14)
[ Back to top ]