
事故による損傷を低減する方法及び装置
この発明は、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない場合に、事故による損傷を低減するための方法及び装置に関する。その場合に、この発明では、システムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)、車両を安全な場所に移動させる形で、車両を制御するものである。

【発明の詳細な説明】
【技術分野】
【0001】
この発明は、特に、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない一次的な事故後において、事故による損傷を低減するための方法及び装置に関する。
【背景技術】
【0002】
従来の能動的及び受動的な安全システムは、一次的な事故を目標としている。一次的な事故が展開している間、運転者は、通常車両を完全に制御している。そのため、運転者は、車両の挙動を能動的に制御することができる。
【0003】
この場合、一次的な事故を防止するために、車両の不安定性に対して自動的に対抗する装置が、車両に統合されている。この装置は、多数の走行安定性制御から構成される。走行安定性制御という概念のもとで、個々の車輪ブレーキ内又は車輪ブレーキ上への設定可能な圧力又はブレーキ力を用いて、並びに駆動エンジンのエンジン管理への介入により、車両の走行挙動を制御する五つの原理が一つに纏められている。それらは、制動プロセス中に個々の車輪のロックを防止するブレーキスリップ制御(ABS)と、駆動する車輪の空転を防止するトラクションスリップ制御(ASR)と、車両の前車軸と後車軸間におけるブレーキ力の配分比率を制御する電子式ブレーキ力分配(EBV)と、縦軸の周りの車両のローリングを防止するローリング制御(ARP)と、垂直軸の周りの車両のヨーイング時に安定した走行状態を提供するヨーイングモーメント制御(ESP)とである。
【0004】
この発明の関係において、車両とは、油圧式、電子油圧式又は電子機械式ブレーキ設備を備えた、四つの車輪を持つ自動車を意味するものとする。この油圧式ブレーキ設備では、運転者のペダル操作によるマスターシリンダーを用いて、ブレーキ圧を上昇させることができる一方、電子油圧式及び電子機械式ブレーキ設備は、センサーで検出した運転者のブレーキ要求に応じて、ブレーキ圧を上昇させるものである。以下においては、油圧式ブレーキ設備を指すものとする。各車輪は、それぞれ一つの吸入バルブと排出バルブを組み込んだブレーキを有する。この吸入バルブを介して、車輪ブレーキは、マスターシリンダーと接続される一方、排出バルブは、無圧のタンク又は低圧溜めに通じている。最後に、ブレーキペダルの位置とは無関係に、車輪ブレーキの圧力を上昇させることができる補助圧力源が、更に有る。吸入バルブと排出バルブは、車輪ブレーキの圧力を制御するために電磁気的に操作することが可能である。
【0005】
走行動特性状態を検出するために、各車輪当りに1個、合計4個の回転数センサーと、少なくとも1個のヨーイング速度測定器と、1個の横加速度測定器と、場合によっては、1個の縦加速度測定器と、ブレーキペダルによって生成されるブレーキ圧用の少なくとも1個の圧力センサーとが有る。この場合、運転者によって上昇されるブレーキ圧が、補助圧力源のブレーキ圧と区別することができないような形で、補助圧力源が配置されている場合、この圧力センサーは、ペダルストローク測定器又はベダル力測定器と置き換えることが可能である。
【0006】
走行安定性制御により、臨界的な状況において、運転者が、より良好に走行挙動を支配することが可能な形で、車両の走行挙動が制御される。この場合、臨界的な状況とは、不安定な走行状態であり、極端な場合には、車両が運転者の指示に従わない状態である。即ち、走行安定性制御の機能は、このような状況下において、物理的な限界内で、運転者が希望する車両挙動を車両に与えることである。
【0007】
ブレーキスリップ制御、トラクションスリップ制御及び電子式ブレーキ力分配に関しては、先ず第一に、走路上でのタイヤの縦方向スリップが重要であるのに対して、ヨーイングモーメント制御(GMR)には、別の変量、例えば、ヨー角速度や横滑り角速度が入力される。特許文献1から、ローリング制御は、通常横加速度又はローリングの変量を評価している。
【0008】
走行安定性制御以外に、周囲環境センサーにもとづき、交通状況を解析し、検出した周囲環境に応じて、車両速度を、検出した走行状況に自動的に適合させたり、予想される事故の検出した危険度にもとづき、能動的な安全システムを始動させる支援及び安全システムが、益々車両に配備されつつある。
【0009】
しかし、一連の事故の展開状況において、一次的な事故の後に、更に二次的な事故が起こっている。即ち、既に事故を起こした車両が、静止状態に至るまでの制御されない更なる動きの推移によって、乗客にも、別の道路使用者にも、大きな危険が生じている。この危険は、従来技術では制御されていない。運転者が、一次的な事故の後で、意識を喪失したか、或いはショック状態に有るために、自分の車両に関する制御を喪失した場合、運転者は、もはやESPを用いても、自分の車両を安全に静止状態に持って行くか、或いは有るかもしれない障害物に対して安全に制御することはできない。
【特許文献1】ドイツ特許公開明細書第19632943号
【発明の開示】
【発明が解決しようとする課題】
【0010】
以上の通り、この発明の課題は、車両が事故を起こしたことにより、二次的な事故が起こる前に、好適な制御介入を実行する形で、車両システムを構成することである。
【課題を解決するための手段】
【0011】
この課題は、請求項1の特徴と関連して解決される。
【0012】
一次的な事故後の事故による損傷を低減するための方法は、有利には、一次的な事故を検出する措置と、車両の周囲環境を検出、解析する措置と、車両の動き挙動を検出する措置と、解析した車両の周囲環境を車両の動き挙動と比較する措置と、この比較結果に応じて、車両のブレーキ操作と操縦操作の両方又は一方への介入を決定する措置とを特徴とする。
【0013】
車両の走行動特性制御の加速度センサー、エアーバッグ加速度検知器、エアーバッグ始動部又はシートベルトテンショナー始動部を用いて、一次的な事故を検出するのが有利である。
【0014】
この場合、有利には、レーダーセンサー、ライダーセンサー(光の伝送所要時間による測定原理にもとづき動作する光電式センサー、特に、赤外線センサー)、カメラなどの画像記録式センサーの中の一つ以上を用いて、車両の周囲環境を検出して、ユニットにおいて、車両の周囲環境における物体の位置及びサイズを求める。
【0015】
車両の動き挙動を検出するのに、有利には、車両内又は車両上に既に存在する車両センサーを用いて行う。
【0016】
この場合、車両の軌道及び速度を車両軌道内の物体の位置及び距離と比較して、その比較結果に応じて、ブレーキ操作と操縦操作の両方又は一方への介入を行う。
【0017】
更に、表示及び操作部品を配備し、表示部品を用いて、ブレーキ操作と操縦操作の両方又は一方への目前に迫った介入を運転者に知らせ、操作部品を操作することによって、介入を停止させる。
【0018】
この操作部品の操作が行われなかった場合、所定の時間間隔後に、自動的に介入が実行される。
【0019】
巻き込まれる道路使用者に警告するためには、この介入の前に、車両の光学的な信号発信機を自動的に始動させるのが有利である。
【0020】
有利には、一次的な事故後の事故による損傷を低減するための装置を配備し、この装置は、一次的な事故を検出するための検出ユニットと、車両の周囲環境を検出、解析するための検出ユニットと、車両の動き挙動を検出するための検出ユニットと、解析した車両の周囲環境と車両の動き挙動とを比較して、ブレーキ操作と操縦操作の両方又は一方への介入を決定するためのユニットとを有する。
【0021】
更に、有利には、この装置は、運転者が、ブレーキ操作と操縦操作の両方又は一方への介入を停止することを可能とする操作部品を有する。
【0022】
従って、車両の運転者が、事故を起こした車両を安全な位置に移動させることができない場合に、一次的な事故後の事故による損傷を低減するための方法は、有利には、一つの装置又はシステムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)車両を安全な場所に移動させる形で制御するものと規定する。
【0023】
こうすることによって、有利には、運転者が、一次的な事故後に、自身の車両に関する制御を喪失した場合、二次的な事故により引き起こされる更なる傷害から、運転者及び他の乗客を守ることができる。
【0024】
この方法は、周囲環境センサーによる安全な停止状態に至るまでの回避軌道の賢明な選定に基づいている。それに対して、その時点の交通状況を考慮することなく、車両を安易に減速させることは、むしろ別の衝突の危険性を更に高めるとともに、後続の交通を危険に曝すこととなる。
【発明を実施するための最良の形態】
【0025】
この発明の実施例を図面に図示するとともに、以下において、詳しく説明する。
【0026】
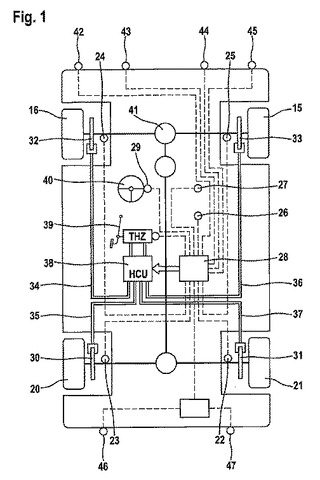
図1は、ブレーキ制御システムを備えた車両を模式的に図示している。図1では、四つの車輪15,16,20,21が図示されている。これらの車輪15,16,20,21の各々は、車輪センサー22〜25を一つずつ備えている。それらの信号は、所定の基準にもとづき、車輪回転数から車両速度vRef を検出する電子制御ユニット28に供給される。更に、ヨーレイトセンサー26、横加速度センサー27、場合によっては縦加速度センサー及び操舵角センサー29が、この制御ユニット28と接続される。ヨーレイトセンサーは、車両の実際のヨー角速度を検出する。この実際のヨー角速度は、車両モデルで算出された目標のヨー角速度と比較される。実際と目標のヨー角速度間の偏差によって、制御ユニット28は、実際のヨー角速度を目標のヨー角速度に誘導するモーメントを車両に与える。そのために、制御ユニット28は、車輪ブレーキに対して、個別的にブレーキ圧を調整している。この車両モデルには、基本的に、操舵角センサー29が検出したハンドルの変量又はハンドルの操舵角が入力される。操舵系統における電子的又は機械的に駆動可能な構成部品41を介して、ヨー角信号又は周囲環境センサー42〜47の信号に応じて、(例えば、前輪駆動の場合)操縦可能な車輪15,16を制御することもできる。周囲環境センサーは、レーダー光線と赤外線の両方又は一方を用いるか、光学的な部品を用いるか、或いはその両方を用いて、近い範囲と遠い範囲の両方又は一方における車両の周囲環境を検出する。更に、各車輪は、車輪ブレーキ30〜33を有する。これらのブレーキは、油圧により動かされ、油圧パイプ34〜37を介して、圧力を加えられている作動油を受け取る。このブレーキ圧は、バルブブロック38によって調整され、その場合、このバルブブロックは、運転者から独立して、電子制御ユニット28で生成される電気信号によって駆動される。運転者は、ブレーキペダルにより操作するマスターシリンダーによって、油圧パイプ内のブレーキ圧を調節することができる。マスターシリンダー又は油圧パイプには、運転者のブレーキ要求を検出することができる圧力センサーが配備されている。
【0027】
ここで、事故が起こって、車両が、停止状態に至るまでに、安全な場所に着けないと仮定した場合、この車両によって、乗客及び周囲環境に対する潜在的な危険性が生じることとなる。
【0028】
ここで、状況によっては、運転者は、もはやハンドルでは障害物の無い走行コースを目標のコースとして設定することができないか、車両を静止状態にまで減速させることができないか、或いはその両方となる。
【0029】
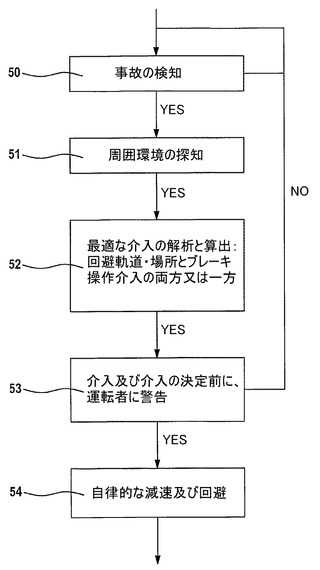
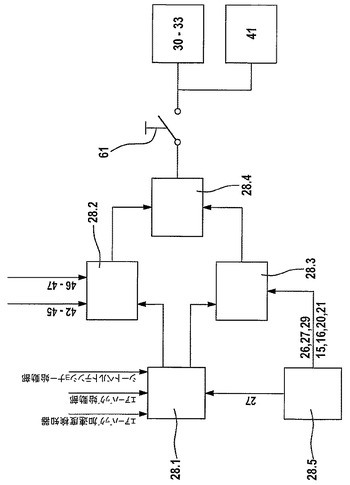
図2と3は、一次的な事故後の二次的な事故を防止するための方法に関するフローチャートを図示している。図示したフローでは、先ずステップ50で、検出ユニット28.1で一次的な事故を検知する。このことは、例えば、走行動特性制御28.5(ESP)の加速度センサー27(横加速度センサーと縦加速度センサーの両方又は一方)、エアーバッグ加速度検知器、エアーバッグ始動部自身又はシートベルトテンショナー始動部から導き出すことができる。
【0030】
次に、ステップ51での周囲環境センサー(例えば、ライダー、レーダー、カメラ又は有利には、これらの方法の組み合わせ)を経由して、ロジックユニット28.2(ステップ52)において、交通状況を解析する。この場合、障害物又は物体を、その車両に対する位置及びその距離に関して検出し、有利には、分類も行う。検知した周囲環境にもとづき、検出ユニット28.3で検出した、事故を起こした車両の動き挙動、例えば、速度、車両の軌道、ヨーイング挙動などに応じて、ロジックユニット28.4内において、車両への採るべき介入を算出する。この場合、少なくとも三つの基本的な介入状況を区別することができ、これらは、組み合わせて実行することもできる。
【0031】
a)車両を減速するための自律的なブレーキ操作
b)トルクを調節するための自律的なブレーキ操作
c)自律的な操縦操作への介入
自律的なブレーキ操作は、専ら交通状況の解析の際に、車両の領域内に物体が検出されなかった場合に実行することができる。その場合、エネルギーを適合させて、静止状態にまで車両を減速させることができる。
【0032】
車両の軌道内に物体が存在する場合、回避するための軌道を算出することができ、その軌道に沿って、自律的に車両を静止状態にまで安全に制動することができる。そうすることによって、乗客及び他の道路使用者の更なる危険性を低減することができる。その目標は、別の衝突を引き起こすこと無く、制御されていない車両を出来る限り速く静止状態にまで減速させることである。
【0033】
有利には、ブレーキ操作と操縦操作を組み合わせた介入を実行する。この場合、ブレーキ操作とは、同じ又は異なるブレーキ圧による、すべての車輪15,16,20,21への介入(減速)又は少なくとも一つの車輪への介入(トルク調節)であると解釈する。この場合、先ずは速度を低下させる、即ち、車両から運動力学的なエネルギーを取り去ることを考慮すべきである。速度が、規定の閾値よりも小さくなった場合に初めて、追加的な操縦への介入を行う。その前提条件は、周囲環境センサー42〜45が、車両を安全に停止させることができる好適な安全な場所を検知していることである。操縦への介入は、最大で、走行動特性に関して臨界的な状態が発生しない程度の大きさしか許容されない、即ち、約0.4gの横加速度を上回らないものとする。
【0034】
これらの介入は、当然のことながら、周囲環境の持続的な観察下において可能である。即ち、例えば、自律的な緊急ブレーキ介入を採る場合、後方の交通にも注意を払わなければならない。
【0035】
後方を向いた周囲環境センサー46,47を利用することができる方法は、特に有利である。それによって、後続の交通と後方に有る周囲環境の両方又は一方を、自律的な回避プロセスと減速プロセスの両方又は一方に取り入れることが可能である。
【0036】
この場合、当該の車両の減速は、以下の式(1)を超えてはならない。
【0037】
【数1】
【0038】
ここで、
aμmax :物理的に可能な最大限の減速
srel0 :観測時点での距離
vref0 :観測時点での相対速度
aref0 :観測時点での相対加速度
treak :運転者の反応時間
自律的な介入の前に、ステップ53では、その介入について、運転者に通報又は警告し、その結果、運転者は、操作機器61によって、自動的な回避と減速の両方又は一方を阻止して、自分自身で更に制御を行うことができることとなる。この操作機器が、運転者によって操作された場合、フローは、ステップ50から新たに進行する。
【0039】
時間制限を超えた場合、運転者と後続の交通は、例えば、警報灯とブレーキ灯の両方又は一方を作動することによって、緊急運転が開始されたことを知らされるとともに、ステップ54で、緊急介入(自律的な減速と回避の両方又は一方)が実行される。
【0040】
同様に、(例えば、運転者が意識を喪失したために)手を離したことを検知するとともに、不安定な走行状態を検出することによって、車両のシステムを作動させることが可能であり、安全な静止状態に至るまでの自律的な減速と回避の両方又は一方を始動するのが、特に有利である。
【図面の簡単な説明】
【0041】
【図1】車両動特性制御及び周囲環境センサーの構成部品を備えた車両
【図2】この発明による方法のフローチャート
【図3】図1の制御ユニットの模式的なブロック接続図
【技術分野】
【0001】
この発明は、特に、車両の運転者が、事故を起こした車両を安全な場所に移動させることができない一次的な事故後において、事故による損傷を低減するための方法及び装置に関する。
【背景技術】
【0002】
従来の能動的及び受動的な安全システムは、一次的な事故を目標としている。一次的な事故が展開している間、運転者は、通常車両を完全に制御している。そのため、運転者は、車両の挙動を能動的に制御することができる。
【0003】
この場合、一次的な事故を防止するために、車両の不安定性に対して自動的に対抗する装置が、車両に統合されている。この装置は、多数の走行安定性制御から構成される。走行安定性制御という概念のもとで、個々の車輪ブレーキ内又は車輪ブレーキ上への設定可能な圧力又はブレーキ力を用いて、並びに駆動エンジンのエンジン管理への介入により、車両の走行挙動を制御する五つの原理が一つに纏められている。それらは、制動プロセス中に個々の車輪のロックを防止するブレーキスリップ制御(ABS)と、駆動する車輪の空転を防止するトラクションスリップ制御(ASR)と、車両の前車軸と後車軸間におけるブレーキ力の配分比率を制御する電子式ブレーキ力分配(EBV)と、縦軸の周りの車両のローリングを防止するローリング制御(ARP)と、垂直軸の周りの車両のヨーイング時に安定した走行状態を提供するヨーイングモーメント制御(ESP)とである。
【0004】
この発明の関係において、車両とは、油圧式、電子油圧式又は電子機械式ブレーキ設備を備えた、四つの車輪を持つ自動車を意味するものとする。この油圧式ブレーキ設備では、運転者のペダル操作によるマスターシリンダーを用いて、ブレーキ圧を上昇させることができる一方、電子油圧式及び電子機械式ブレーキ設備は、センサーで検出した運転者のブレーキ要求に応じて、ブレーキ圧を上昇させるものである。以下においては、油圧式ブレーキ設備を指すものとする。各車輪は、それぞれ一つの吸入バルブと排出バルブを組み込んだブレーキを有する。この吸入バルブを介して、車輪ブレーキは、マスターシリンダーと接続される一方、排出バルブは、無圧のタンク又は低圧溜めに通じている。最後に、ブレーキペダルの位置とは無関係に、車輪ブレーキの圧力を上昇させることができる補助圧力源が、更に有る。吸入バルブと排出バルブは、車輪ブレーキの圧力を制御するために電磁気的に操作することが可能である。
【0005】
走行動特性状態を検出するために、各車輪当りに1個、合計4個の回転数センサーと、少なくとも1個のヨーイング速度測定器と、1個の横加速度測定器と、場合によっては、1個の縦加速度測定器と、ブレーキペダルによって生成されるブレーキ圧用の少なくとも1個の圧力センサーとが有る。この場合、運転者によって上昇されるブレーキ圧が、補助圧力源のブレーキ圧と区別することができないような形で、補助圧力源が配置されている場合、この圧力センサーは、ペダルストローク測定器又はベダル力測定器と置き換えることが可能である。
【0006】
走行安定性制御により、臨界的な状況において、運転者が、より良好に走行挙動を支配することが可能な形で、車両の走行挙動が制御される。この場合、臨界的な状況とは、不安定な走行状態であり、極端な場合には、車両が運転者の指示に従わない状態である。即ち、走行安定性制御の機能は、このような状況下において、物理的な限界内で、運転者が希望する車両挙動を車両に与えることである。
【0007】
ブレーキスリップ制御、トラクションスリップ制御及び電子式ブレーキ力分配に関しては、先ず第一に、走路上でのタイヤの縦方向スリップが重要であるのに対して、ヨーイングモーメント制御(GMR)には、別の変量、例えば、ヨー角速度や横滑り角速度が入力される。特許文献1から、ローリング制御は、通常横加速度又はローリングの変量を評価している。
【0008】
走行安定性制御以外に、周囲環境センサーにもとづき、交通状況を解析し、検出した周囲環境に応じて、車両速度を、検出した走行状況に自動的に適合させたり、予想される事故の検出した危険度にもとづき、能動的な安全システムを始動させる支援及び安全システムが、益々車両に配備されつつある。
【0009】
しかし、一連の事故の展開状況において、一次的な事故の後に、更に二次的な事故が起こっている。即ち、既に事故を起こした車両が、静止状態に至るまでの制御されない更なる動きの推移によって、乗客にも、別の道路使用者にも、大きな危険が生じている。この危険は、従来技術では制御されていない。運転者が、一次的な事故の後で、意識を喪失したか、或いはショック状態に有るために、自分の車両に関する制御を喪失した場合、運転者は、もはやESPを用いても、自分の車両を安全に静止状態に持って行くか、或いは有るかもしれない障害物に対して安全に制御することはできない。
【特許文献1】ドイツ特許公開明細書第19632943号
【発明の開示】
【発明が解決しようとする課題】
【0010】
以上の通り、この発明の課題は、車両が事故を起こしたことにより、二次的な事故が起こる前に、好適な制御介入を実行する形で、車両システムを構成することである。
【課題を解決するための手段】
【0011】
この課題は、請求項1の特徴と関連して解決される。
【0012】
一次的な事故後の事故による損傷を低減するための方法は、有利には、一次的な事故を検出する措置と、車両の周囲環境を検出、解析する措置と、車両の動き挙動を検出する措置と、解析した車両の周囲環境を車両の動き挙動と比較する措置と、この比較結果に応じて、車両のブレーキ操作と操縦操作の両方又は一方への介入を決定する措置とを特徴とする。
【0013】
車両の走行動特性制御の加速度センサー、エアーバッグ加速度検知器、エアーバッグ始動部又はシートベルトテンショナー始動部を用いて、一次的な事故を検出するのが有利である。
【0014】
この場合、有利には、レーダーセンサー、ライダーセンサー(光の伝送所要時間による測定原理にもとづき動作する光電式センサー、特に、赤外線センサー)、カメラなどの画像記録式センサーの中の一つ以上を用いて、車両の周囲環境を検出して、ユニットにおいて、車両の周囲環境における物体の位置及びサイズを求める。
【0015】
車両の動き挙動を検出するのに、有利には、車両内又は車両上に既に存在する車両センサーを用いて行う。
【0016】
この場合、車両の軌道及び速度を車両軌道内の物体の位置及び距離と比較して、その比較結果に応じて、ブレーキ操作と操縦操作の両方又は一方への介入を行う。
【0017】
更に、表示及び操作部品を配備し、表示部品を用いて、ブレーキ操作と操縦操作の両方又は一方への目前に迫った介入を運転者に知らせ、操作部品を操作することによって、介入を停止させる。
【0018】
この操作部品の操作が行われなかった場合、所定の時間間隔後に、自動的に介入が実行される。
【0019】
巻き込まれる道路使用者に警告するためには、この介入の前に、車両の光学的な信号発信機を自動的に始動させるのが有利である。
【0020】
有利には、一次的な事故後の事故による損傷を低減するための装置を配備し、この装置は、一次的な事故を検出するための検出ユニットと、車両の周囲環境を検出、解析するための検出ユニットと、車両の動き挙動を検出するための検出ユニットと、解析した車両の周囲環境と車両の動き挙動とを比較して、ブレーキ操作と操縦操作の両方又は一方への介入を決定するためのユニットとを有する。
【0021】
更に、有利には、この装置は、運転者が、ブレーキ操作と操縦操作の両方又は一方への介入を停止することを可能とする操作部品を有する。
【0022】
従って、車両の運転者が、事故を起こした車両を安全な位置に移動させることができない場合に、一次的な事故後の事故による損傷を低減するための方法は、有利には、一つの装置又はシステムが、好適な手法で車両の動き挙動に介入して、運転者の助け無しに(自律的に)車両を安全な場所に移動させる形で制御するものと規定する。
【0023】
こうすることによって、有利には、運転者が、一次的な事故後に、自身の車両に関する制御を喪失した場合、二次的な事故により引き起こされる更なる傷害から、運転者及び他の乗客を守ることができる。
【0024】
この方法は、周囲環境センサーによる安全な停止状態に至るまでの回避軌道の賢明な選定に基づいている。それに対して、その時点の交通状況を考慮することなく、車両を安易に減速させることは、むしろ別の衝突の危険性を更に高めるとともに、後続の交通を危険に曝すこととなる。
【発明を実施するための最良の形態】
【0025】
この発明の実施例を図面に図示するとともに、以下において、詳しく説明する。
【0026】
図1は、ブレーキ制御システムを備えた車両を模式的に図示している。図1では、四つの車輪15,16,20,21が図示されている。これらの車輪15,16,20,21の各々は、車輪センサー22〜25を一つずつ備えている。それらの信号は、所定の基準にもとづき、車輪回転数から車両速度vRef を検出する電子制御ユニット28に供給される。更に、ヨーレイトセンサー26、横加速度センサー27、場合によっては縦加速度センサー及び操舵角センサー29が、この制御ユニット28と接続される。ヨーレイトセンサーは、車両の実際のヨー角速度を検出する。この実際のヨー角速度は、車両モデルで算出された目標のヨー角速度と比較される。実際と目標のヨー角速度間の偏差によって、制御ユニット28は、実際のヨー角速度を目標のヨー角速度に誘導するモーメントを車両に与える。そのために、制御ユニット28は、車輪ブレーキに対して、個別的にブレーキ圧を調整している。この車両モデルには、基本的に、操舵角センサー29が検出したハンドルの変量又はハンドルの操舵角が入力される。操舵系統における電子的又は機械的に駆動可能な構成部品41を介して、ヨー角信号又は周囲環境センサー42〜47の信号に応じて、(例えば、前輪駆動の場合)操縦可能な車輪15,16を制御することもできる。周囲環境センサーは、レーダー光線と赤外線の両方又は一方を用いるか、光学的な部品を用いるか、或いはその両方を用いて、近い範囲と遠い範囲の両方又は一方における車両の周囲環境を検出する。更に、各車輪は、車輪ブレーキ30〜33を有する。これらのブレーキは、油圧により動かされ、油圧パイプ34〜37を介して、圧力を加えられている作動油を受け取る。このブレーキ圧は、バルブブロック38によって調整され、その場合、このバルブブロックは、運転者から独立して、電子制御ユニット28で生成される電気信号によって駆動される。運転者は、ブレーキペダルにより操作するマスターシリンダーによって、油圧パイプ内のブレーキ圧を調節することができる。マスターシリンダー又は油圧パイプには、運転者のブレーキ要求を検出することができる圧力センサーが配備されている。
【0027】
ここで、事故が起こって、車両が、停止状態に至るまでに、安全な場所に着けないと仮定した場合、この車両によって、乗客及び周囲環境に対する潜在的な危険性が生じることとなる。
【0028】
ここで、状況によっては、運転者は、もはやハンドルでは障害物の無い走行コースを目標のコースとして設定することができないか、車両を静止状態にまで減速させることができないか、或いはその両方となる。
【0029】
図2と3は、一次的な事故後の二次的な事故を防止するための方法に関するフローチャートを図示している。図示したフローでは、先ずステップ50で、検出ユニット28.1で一次的な事故を検知する。このことは、例えば、走行動特性制御28.5(ESP)の加速度センサー27(横加速度センサーと縦加速度センサーの両方又は一方)、エアーバッグ加速度検知器、エアーバッグ始動部自身又はシートベルトテンショナー始動部から導き出すことができる。
【0030】
次に、ステップ51での周囲環境センサー(例えば、ライダー、レーダー、カメラ又は有利には、これらの方法の組み合わせ)を経由して、ロジックユニット28.2(ステップ52)において、交通状況を解析する。この場合、障害物又は物体を、その車両に対する位置及びその距離に関して検出し、有利には、分類も行う。検知した周囲環境にもとづき、検出ユニット28.3で検出した、事故を起こした車両の動き挙動、例えば、速度、車両の軌道、ヨーイング挙動などに応じて、ロジックユニット28.4内において、車両への採るべき介入を算出する。この場合、少なくとも三つの基本的な介入状況を区別することができ、これらは、組み合わせて実行することもできる。
【0031】
a)車両を減速するための自律的なブレーキ操作
b)トルクを調節するための自律的なブレーキ操作
c)自律的な操縦操作への介入
自律的なブレーキ操作は、専ら交通状況の解析の際に、車両の領域内に物体が検出されなかった場合に実行することができる。その場合、エネルギーを適合させて、静止状態にまで車両を減速させることができる。
【0032】
車両の軌道内に物体が存在する場合、回避するための軌道を算出することができ、その軌道に沿って、自律的に車両を静止状態にまで安全に制動することができる。そうすることによって、乗客及び他の道路使用者の更なる危険性を低減することができる。その目標は、別の衝突を引き起こすこと無く、制御されていない車両を出来る限り速く静止状態にまで減速させることである。
【0033】
有利には、ブレーキ操作と操縦操作を組み合わせた介入を実行する。この場合、ブレーキ操作とは、同じ又は異なるブレーキ圧による、すべての車輪15,16,20,21への介入(減速)又は少なくとも一つの車輪への介入(トルク調節)であると解釈する。この場合、先ずは速度を低下させる、即ち、車両から運動力学的なエネルギーを取り去ることを考慮すべきである。速度が、規定の閾値よりも小さくなった場合に初めて、追加的な操縦への介入を行う。その前提条件は、周囲環境センサー42〜45が、車両を安全に停止させることができる好適な安全な場所を検知していることである。操縦への介入は、最大で、走行動特性に関して臨界的な状態が発生しない程度の大きさしか許容されない、即ち、約0.4gの横加速度を上回らないものとする。
【0034】
これらの介入は、当然のことながら、周囲環境の持続的な観察下において可能である。即ち、例えば、自律的な緊急ブレーキ介入を採る場合、後方の交通にも注意を払わなければならない。
【0035】
後方を向いた周囲環境センサー46,47を利用することができる方法は、特に有利である。それによって、後続の交通と後方に有る周囲環境の両方又は一方を、自律的な回避プロセスと減速プロセスの両方又は一方に取り入れることが可能である。
【0036】
この場合、当該の車両の減速は、以下の式(1)を超えてはならない。
【0037】
【数1】
【0038】
ここで、
aμmax :物理的に可能な最大限の減速
srel0 :観測時点での距離
vref0 :観測時点での相対速度
aref0 :観測時点での相対加速度
treak :運転者の反応時間
自律的な介入の前に、ステップ53では、その介入について、運転者に通報又は警告し、その結果、運転者は、操作機器61によって、自動的な回避と減速の両方又は一方を阻止して、自分自身で更に制御を行うことができることとなる。この操作機器が、運転者によって操作された場合、フローは、ステップ50から新たに進行する。
【0039】
時間制限を超えた場合、運転者と後続の交通は、例えば、警報灯とブレーキ灯の両方又は一方を作動することによって、緊急運転が開始されたことを知らされるとともに、ステップ54で、緊急介入(自律的な減速と回避の両方又は一方)が実行される。
【0040】
同様に、(例えば、運転者が意識を喪失したために)手を離したことを検知するとともに、不安定な走行状態を検出することによって、車両のシステムを作動させることが可能であり、安全な静止状態に至るまでの自律的な減速と回避の両方又は一方を始動するのが、特に有利である。
【図面の簡単な説明】
【0041】
【図1】車両動特性制御及び周囲環境センサーの構成部品を備えた車両
【図2】この発明による方法のフローチャート
【図3】図1の制御ユニットの模式的なブロック接続図
【特許請求の範囲】
【請求項1】
一次的な事故後の事故による損傷を低減する方法において、
一次的な事故を検出する措置と、
車両の周囲環境を検出、解析する措置と、
車両の動き挙動を検出する措置と、
解析した車両の周囲環境を車両の動き挙動と比較する措置と、
この比較結果に応じて、車両のブレーキ操作と操縦操作の両方又は一方への介入を決定する措置とを特徴とする方法。
【請求項2】
車両の走行動特性制御の加速度センサー(27)、エアーバッグ加速度検知器、エアーバッグ始動部又はシートベルトテンショナー始動部を用いて、一次的な事故を検出することを特徴とする請求項1に記載の方法。
【請求項3】
レーダーセンサー、赤外線センサー、カメラ(42〜47)の中の一つ以上を用いて、車両の周囲環境を検出して、ユニット(28)において、車両の周囲環境内の物体の位置及びサイズを求めることを特徴とする請求項1又は2に記載の方法。
【請求項4】
車両センサー(22〜25,26,27,29)により、車両の動き挙動を検出することを特徴とする請求項1から3までのいずれか一つに記載の方法。
【請求項5】
車両の軌道及び速度を、車両の軌道内の物体の位置及び距離と比較して、その比較結果に応じて、ブレーキ操作と操縦操作の両方又は一方への介入を行うことを特徴とする請求項1から4までのいずれか一つに記載の方法。
【請求項6】
表示及び操作部品を配備しており、この表示部品を用いて、ブレーキ操作と操縦操作の両方又は一方への目前に迫った介入を運転者に通知し、この操作部品を操作することによって、この介入を停止させることを特徴とする請求項1から5までのいずれか一つに記載の方法。
【請求項7】
当該の介入が、所定の時間間隔後に自動的に実行されることを特徴とする請求項1から6までのいずれか一つに記載の方法。
【請求項8】
当該の介入の前に、車両の光学的な信号発信機が、自動的に始動されることを特徴とする請求項1から6までのいずれか一つに記載の方法。
【請求項9】
一次的な事故後の事故による損傷を低減するための装置において、
一次的な事故を検出するための検出ユニット(28.1)と、
車両の周囲環境を検出、解析するための検出ユニット(42〜47,28.3)と、
車両の動き挙動を検出するための検出ユニット(15,16,20,21,26,29,28.3)と、
解析した車両の周囲環境を車両の動き挙動と比較して、ブレーキ操作(30〜33)と操縦操作(41)の両方又は一方への介入を決定するためのユニット(28.4)とを特徴とする装置。
【請求項10】
操作部品(61)を配備しており、この操作部品を用いて、運転者が、ブレーキ操作(30〜33)と操縦操作(41)の両方又は一方への介入を停止させることができることを特徴とする請求項9に記載の装置。
【請求項1】
一次的な事故後の事故による損傷を低減する方法において、
一次的な事故を検出する措置と、
車両の周囲環境を検出、解析する措置と、
車両の動き挙動を検出する措置と、
解析した車両の周囲環境を車両の動き挙動と比較する措置と、
この比較結果に応じて、車両のブレーキ操作と操縦操作の両方又は一方への介入を決定する措置とを特徴とする方法。
【請求項2】
車両の走行動特性制御の加速度センサー(27)、エアーバッグ加速度検知器、エアーバッグ始動部又はシートベルトテンショナー始動部を用いて、一次的な事故を検出することを特徴とする請求項1に記載の方法。
【請求項3】
レーダーセンサー、赤外線センサー、カメラ(42〜47)の中の一つ以上を用いて、車両の周囲環境を検出して、ユニット(28)において、車両の周囲環境内の物体の位置及びサイズを求めることを特徴とする請求項1又は2に記載の方法。
【請求項4】
車両センサー(22〜25,26,27,29)により、車両の動き挙動を検出することを特徴とする請求項1から3までのいずれか一つに記載の方法。
【請求項5】
車両の軌道及び速度を、車両の軌道内の物体の位置及び距離と比較して、その比較結果に応じて、ブレーキ操作と操縦操作の両方又は一方への介入を行うことを特徴とする請求項1から4までのいずれか一つに記載の方法。
【請求項6】
表示及び操作部品を配備しており、この表示部品を用いて、ブレーキ操作と操縦操作の両方又は一方への目前に迫った介入を運転者に通知し、この操作部品を操作することによって、この介入を停止させることを特徴とする請求項1から5までのいずれか一つに記載の方法。
【請求項7】
当該の介入が、所定の時間間隔後に自動的に実行されることを特徴とする請求項1から6までのいずれか一つに記載の方法。
【請求項8】
当該の介入の前に、車両の光学的な信号発信機が、自動的に始動されることを特徴とする請求項1から6までのいずれか一つに記載の方法。
【請求項9】
一次的な事故後の事故による損傷を低減するための装置において、
一次的な事故を検出するための検出ユニット(28.1)と、
車両の周囲環境を検出、解析するための検出ユニット(42〜47,28.3)と、
車両の動き挙動を検出するための検出ユニット(15,16,20,21,26,29,28.3)と、
解析した車両の周囲環境を車両の動き挙動と比較して、ブレーキ操作(30〜33)と操縦操作(41)の両方又は一方への介入を決定するためのユニット(28.4)とを特徴とする装置。
【請求項10】
操作部品(61)を配備しており、この操作部品を用いて、運転者が、ブレーキ操作(30〜33)と操縦操作(41)の両方又は一方への介入を停止させることができることを特徴とする請求項9に記載の装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2007−516127(P2007−516127A)
【公表日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願番号】特願2006−538869(P2006−538869)
【出願日】平成16年11月12日(2004.11.12)
【国際出願番号】PCT/EP2004/052946
【国際公開番号】WO2005/047066
【国際公開日】平成17年5月26日(2005.5.26)
【出願人】(399023800)コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト (162)
【Fターム(参考)】
【公表日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願日】平成16年11月12日(2004.11.12)
【国際出願番号】PCT/EP2004/052946
【国際公開番号】WO2005/047066
【国際公開日】平成17年5月26日(2005.5.26)
【出願人】(399023800)コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト (162)
【Fターム(参考)】
[ Back to top ]