
事故発生予測装置、事故発生予測プログラム及び事故発生予測方法
【課題】道路形状に依らない他車の動きに起因する事故の発生を予測する。
【解決手段】自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び前記他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する予測状況DB18と、自車が実際に運転されている状態で、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報を取得する取得部(10A,10B,11,14)と、取得部で取得された情報と、事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部16と、を備える。
【解決手段】自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び前記他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する予測状況DB18と、自車が実際に運転されている状態で、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報を取得する取得部(10A,10B,11,14)と、取得部で取得された情報と、事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部16と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本件は、事故発生予測装置、事故発生予測プログラム及び事故発生予測方法に関する。
【背景技術】
【0002】
自動車産業においては、事故を起こさない自動車を実現することは、究極の目標のひとつである。自車が近い将来に他車と事故を起こすか否かの予測を行うためには、自車及び他車が近い将来にどのような状況になっているかを予測する必要がある。従来は、自車及び他車の現在位置と走行ベクトル(速度と走行方向)を取得し、当該走行ベクトルから自車及び他車の一定時間後の位置を予測していた。
【0003】
しかし、上記推定は、自車及び他車が同じ走行ベクトルで走り続けていることを前提とするものである。すなわち、自車及び他車が走行ベクトルを変更するような走行をした場合には予測が外れてしまう。
【0004】
これに対し、特許文献1には、地図情報から対象(自動車)の軌道を推定する技術が開示されている。この技術によれば、道路が直線の場合は直進移動、カーブの場合は道路のカーブに沿って移動、交差点の場合は交差点に進入して移動のように、地図情報(道路形状など)に応じて対象(車)の将来移動位置が推定される。これにより、数秒後において対象が行う可能性のある動きを、1又は複数列挙することができる。
【0005】
また、特許文献2には、過去に発生した交通事故履歴情報をデータベースに保持して、現在の自車の状況とマッチングして事故可能性を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−165555号公報
【特許文献2】特開平11−120478号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1の技術を用いた場合でも、道路形状に依らない車の動きは、推定(予測)することができない。例えば、片側一車線の道路を自車と他車Aがすれ違う際に、他車Bが他車Aの横から飛び出してきた場合、他車Aは他車Bとの衝突を回避するための回避行動を突発的に行う場合がある。この回避行動が、自車の走行する車線へのはみ出しである場合には、自車と他車Aが衝突するおそれがある(もらい事故と呼ばれる)。しかるに、上記特許文献1では、他車Aのような道路形状に依らない車の動きを推定することはできないため、上記のようなもらい事故を回避することができない。
【0008】
なお、特許文献2の技術は、自車の状況(場所、地形、走行速度、交通量、季節、時刻、天候、温度、湿度等の項目)を交通事故履歴情報とマッチングして事故可能性を算出する技術である。しかるに、上記全ての項目が完全に一致することは稀であるため、特許文献2の技術を用いたとしても、事故予測精度を然程高くできないおそれがある。すなわち、事故予測のマッチングに用いる項目を闇雲に多数設定することは、事故予測精度向上の弊害となるおそれがある。
【0009】
そこで本件は上記の課題に鑑みてなされたものであり、道路形状に依らない他車の動きに起因する事故の発生を予測することが可能な事故発生予測装置、事故発生予測プログラム及び事故発生予測方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本明細書に記載の事故発生予測装置は、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える。
【0011】
本明細書に記載の事故発生予測プログラムは、コンピュータを、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる。
【0012】
本明細書に記載の事故発生予測方法は、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む。
【発明の効果】
【0013】
本明細書に記載の事故発生予測装置、事故発生予測プログラム及び事故発生予測方法は、道路形状に依らない他車の動きに起因する事故の発生を予測することができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図2】図2(a)は、事故の発生可能性のある状況を示す図であり、図2(b)は、事故が発生した状態を示す図であり、図2(c)は、第1の実施形態で用いる事故定義データの一例を示す図である。
【図3】第1の実施形態における事故発生予測装置の処理を示すフローチャートである。
【図4】第2の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図5】図5(a)は、事故の発生可能性のある状況の一例を示す図であり、図5(b)は、図5(a)の状況に関する事故定義データを示す図である。
【図6】図6(a)は、事故の発生可能性のある状況の一例を示す図であり、図6(b)は、図6(a)の状況に関する事故定義データを示す図である。
【図7】第3の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図8】図8(a)は、事故の発生可能性のある状況の一例を示す図であり、図8(b)は、図8(a)の状況に関する事故定義データを示す図である。
【図9】図9(a)は、第4の実施形態に係る事故発生予測装置の構成を示すブロック図であり、図9(b)は、第4の実施形態で用いる事故定義データの一例を示す図である。
【図10】第5の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図11】第6の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図12】第7の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0015】
≪第1の実施形態≫
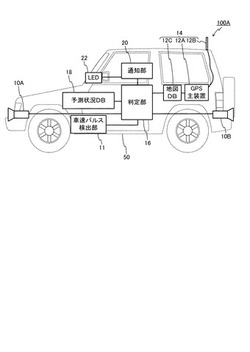
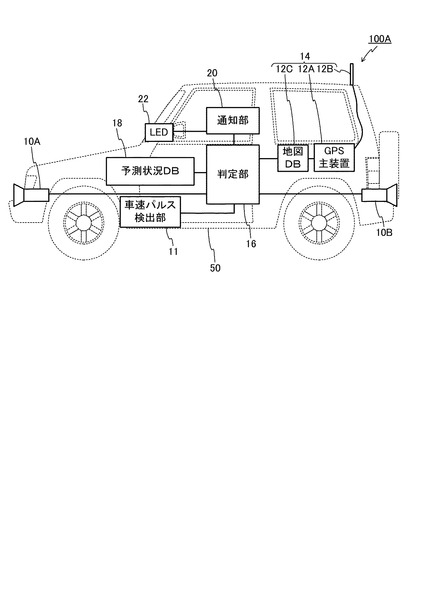
以下、事故発生予測装置の第1の実施形態について、図1〜図3に基づいて詳細に説明する。図1には、第1の実施形態に係る事故発生予測装置100Aがブロック図にて示されている。この事故発生予測装置100Aは、自動車50に搭載されている。
【0016】
事故発生予測装置100Aは、図1に示すように、ミリ波レーダ10A,10Bと、車速パルス検出部11と、GPS装置14と、判定部16と、保持部としての予測状況DB18と、通知部20と、LED22と、を備えている。本実施形態では、ミリ波レーダ10A,10B、車速パルス検出部11、及びGPS装置14が、種々の情報を取得する取得部としての機能を有している。
【0017】
ミリ波レーダ10A,10Bは、例えば、自動車50の前側と後側に設けられている。ミリ波レーダ10A,10Bは、自動車50の周辺に存在している物体(自動車や自転車、歩行者のほか、建造物なども含む)の、自動車50との相対位置を検出する。すなわち、ミリ波レーダ10A、10Bは、近い将来に事故を起こす対象となりうる自動車(事故直接対象とも呼ぶ)の相対位置(自車に対する位置)の情報を取得することができる。また、ミリ波レーダ10A、10Bは、事故直接対象の走行に影響を与える要因となる可能性のある物体(事故間接対象)の相対位置(自車に対する位置)の情報を取得することができる。
【0018】
さらに、ミリ波レーダ10A,10Bは、事故直接対象及び事故間接対象の、所定時間における相対位置の変化を得ることができる。すなわち、本第1の実施形態では、ミリ波レーダ10A,10Bは、当該相対位置の変化から、事故直接対象の移動ベクトル(移動速度及び移動方向)と、事故間接対象の移動ベクトルを取得しているともいえる。
【0019】
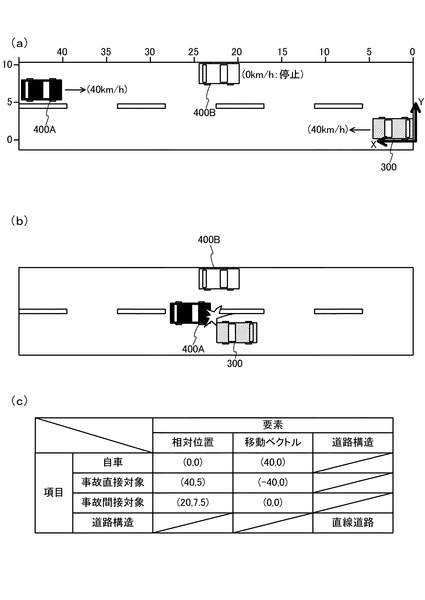
ここで、図2(a)を用いて、上述した事故直接対象と事故間接対象について具体的に説明する。図2(a)には、近い将来に事故が起きる可能性のある道路状況が模式的に示されている。この図2(a)では、片側一車線の道路上で自車300と他車400Aとがすれ違おうとしているとともに、他車400Aが走行する車線上に他車400Bが停車している状況を示す。この状況では、近い将来の自車300と他車400Aがすれ違うタイミングで、他車400Aが他車400Bを避けようとして自車の走行する車線にはみ出すおそれがある。この場合、図2(b)に示すように、自車300と他車400Aが衝突する可能性がある。すなわち、自車300から見れば、他車400Aは事故直接対象であり、他車400Bは、事故直接対象(400A)の動きを変更させる(移動ベクトルを変動させる)事故間接対象であるといえる。
【0020】
図1に戻り、車速パルス検出部11は、自動車50の車軸の回転数に比例して発生する車速パルスを計測して、自動車50の移動速度を取得する。GPS装置14は、GPS主装置12Aと、GPSアンテナ12Bと、地図DB12Cとを有している。GPS主装置12Aは、GPSアンテナ12Bを介して自動車50の位置情報(緯度、経度)をGPS衛星から取得する。また、GPS主装置12Aは、取得した自動車50の位置情報と、地図DB12Cに格納されている地図データとを用いて、自動車50が位置している道路状況を取得する。この道路状況には、例えば、交差点、直線道路、坂道、カーブ、踏み切りの有無、トンネル入口など、道路形状や道路構造が含まれる。なお、GPS装置14からは自動車50の移動方向も取得できる。当該移動方向は、車速パルス検出部11で取得された移動速度とともに、自動車50の移動ベクトルの算出に用いられる。なお、自動車50にジャイロセンサや方位検出センサなどを設け、これらのセンサを用いて自動車50の移動方向を取得することとしても良い。
【0021】
判定部16は、ミリ波レーダ10A,10Bで取得された事故直接対象及び事故間接対象の相対位置及び移動ベクトルを取得する。また、判定部16は、車速パルス検出部11及びGPS装置14で取得された自車の移動ベクトル、並びにGPS装置14で取得された道路状況を取得する。そして、判定部16は、各情報と、予測状況DB18に格納されている事故予測状況のデータ(以下、事故定義データと呼ぶ)とを比較することで、自車と、事故直接対象との間で、近い将来に事故が起きる可能性があるか否かを判定する。なお、判定部16における判定方法や、予測状況DB18に格納されている事故定義データについては、後に詳述する。
【0022】
通知部20は、判定部16において、事故が近い将来に起きる可能性があると判定された場合に、窓枠等に設けられたLED22を介して、自動車50の運転者に、警告を発する。なお、通知部20は、LED22以外に、複数箇所にハーフミラーや有機ELを設置して情報を投影する技術や、HUD(Head-Up Display)などを用いて、自動車50のフロントガラス上に、警告を表示しても良い。また、その他の方法で、視覚を通じた警告を行っても良い。更に、通知部20は、視覚を通じた警告に限らず、音などによる聴覚を通じた警告や、振動などによる触覚を通じた警告などを行うこととしても良い。
【0023】
図3は、事故発生予測装置100Aによる処理手順を示すフローチャートである。以下、図3に沿って、他の図面を適宜参照しつつ、説明する。
【0024】
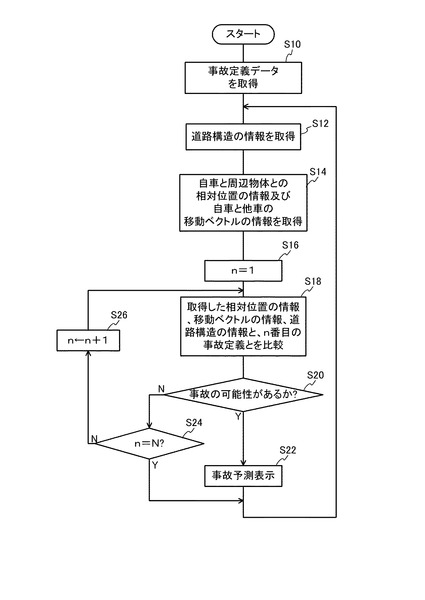
図3のステップS10では、予測状況DB18が事故定義データを取得する。この事故定義データとしては、過去の事故事例を分析したデータや、安全運転の教育のためにまとめられている防衛運転や危険予知運転などで扱われている事例のデータなどを用いることができる。例えば、図2(a)のような事例であれば、図2(c)に示すような事故定義データとなる。図2(c)に示す事故定義データでは、自車、事故直接対象、及び事故間接対象の相対位置、移動ベクトルの情報が図2(a)のXY座標を用いて定義される。また、道路構造の情報として、「直線道路」が定義される。このような事故定義データを様々なシチュエーションで予め多数(ここでは、N個とする)用意しておき、ステップS10において予測状況DB18に格納する。様々なシチュエーションには、事故間接対象が自転車や歩行者、障害物などである場合も含み、道路構造が坂道や交差点、カーブなどである場合も含む。なお、ステップS10は、事故発生予測装置100Aが自動車50に搭載される以前に行われても良い。また、事故定義データは、定期的に又は適宜更新されても良い。
【0025】
次いで、図3のステップS12では、GPS装置14が、道路構造の情報を取得する。次いで、ステップS14では、ミリ波レーダ10A,10B、車速パルス検出部11及びGPS装置14が、自車と周辺物体との相対位置の情報、及び自車と他車の移動ベクトルの情報を取得する。
【0026】
次いで、ステップS16では、判定部16が、事故定義データの番号を示すパラメータnを1に設定する。次いで、ステップS18では、判定部16が、ステップS12,S14で取得した相対位置の情報、移動ベクトルの情報、道路構造の情報を取得し、これらの情報とn番目(1番目)の事故定義データとを比較する。この比較において、取得した情報と事故定義データとがほぼ一致している場合には、事故が近い将来に起きる可能性があることを意味する。ここで、取得した情報と事故定義データとが「ほぼ一致する」とは、取得した情報と事故定義データとが完全一致する場合に限らず、取得した情報と事故定義データとの誤差が、予め定めておいた所定範囲内に含まれる場合も含む。例えば、自車300と、他車400A、400Bとが、実際に図2(a)のような状況にある場合で、かつn番目の事故定義データが、図2(c)のようなデータであったとする。この場合、図2(c)の事故定義データと、現在の状況とがほぼ一致することとなるので、判定部16は、図2(b)に示すような自車300と他車(事故直接対象)400Aとの事故が近い将来に起きる可能性があると判断する。
【0027】
なお、ステップS14において取得した情報からは、どの自動車が事故直接対象で、どの自動車が事故間接対象であるかは不明である。したがって、ステップS18の比較においては、他車400Aを事故直接対象にする場合や、他車400Bを事故直接対象にする場合など、全ての可能性について総当りで比較することが考えられる。
【0028】
次いで、ステップS20では、判定部16が近い将来に事故が起きる可能性があるか否かを判断する。ここでの判断が肯定された場合には、ステップS22に移行する。ステップS22では、通知部20がLED22を介して、自車を運転している運転者に対して、近い将来に事故が起きる可能性があることを警告し、ステップS12に戻る。なお、運転者は、当該警告に基づいて、前方に注意を払ったり、場合によってはブレーキを踏んだり、アクセルを戻したり、ハンドルを切ったりすることで、事故を未然に回避することができる。
【0029】
一方、ステップS20の判断が否定された場合には、ステップS24に移行する。ステップS24では、判定部16がnがNであるか否かを判断する。ここで、Nは、前述のように予測状況DB18に格納されている事故定義データの全個数を意味するので、ステップS24では、全ての事故定義データを用いた判定を行ったか否かを判断していることになる。ここでの判断が否定された場合には、ステップS26において、nを1インクリメント(n←n+1)した後、ステップS18に戻る。その後は、ステップS20の判断が肯定されるか、あるいは、ステップS24の判断が肯定されるまで、判定部16は、事故定義データを用いた判定を行う。一方、ステップS26の判断が肯定された場合には、ステップS12に移行する。
【0030】
ステップS12に戻った場合には、新たな状況において、上記と同様にして、取得した情報と、事故定義データとを比較して、近い将来の事故の可能性の判定を繰り返す。
【0031】
以上、詳細に説明したように、本第1の実施形態によると、判定部16は、予測状況DB18が保持する、自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義データと、自車が実際に運転されている状態で、ミリ波レーダ10A,10B、車速パルス検出部11、GPS装置14で取得される自車と他車の位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報と、を比較して、事故が発生する可能性があるか否かを判定する。したがって、判定部16は、直接事故を起こす可能性のある他車のみならず、直接事故を起こす可能性のある他車の移動ベクトルを変動させる要因(本第1の実施形態では、他車400Aの移動ベクトルを変動させる他車400B)の情報についても、事故定義データとの比較を行って事故の可能性を判定する。これにより、本実施形態では、道路形状に依らない他車の動き(移動ベクトルの変動)起因する事故についても、的確に予測することができる。
【0032】
また、本第1の実施形態では、判定部16により近い将来に事故が起きる可能性があると判定されたときに、通知部20が、LED22を介して運転者に警告を発する。したがって、運転者は、警告に従って、前方に注意を払ったり、場合によってはブレーキを踏んだり、アクセルを戻したり、ハンドルを切ったりすることで、事故を未然に回避することができる。
【0033】
また、本第1の実施形態では、事故定義データが自車と他車が位置する道路構造の情報でも定義されており、判定部16が、GPS装置14で取得された道路構造の情報と、事故定義データとの比較も行うことで、事故が発生する可能性があるか否かの判定を行う。このように、交差点やカーブなどの道路構造を更に考慮することで、的確な事故予測を行うことができる。
【0034】
なお、上記第1の実施形態では、ステップS12、S14の実施順を変更しても良いし、ステップS12とS14を同時に行うこととしても良い。
【0035】
また、上記第1の実施形態では、他車の相対位置及び移動ベクトルを取得する装置としてミリ波レーダを採用したが、これに限らず、例えば、カメラ2台を用いるステレオビジョンセンサを採用することとしても良い。また、上記第1の実施形態では、他車の相対位置や移動ベクトルの情報を、共通の装置で取得する場合について説明したが、これに限らず、相対位置と移動ベクトルを別の装置で取得しても良い。
【0036】
なお、上記第1の実施形態では、判定部16は、事故が起きる可能性があると判定した場合、自車と他車との相対距離及び相対速度から、事故発生までの時間を算出することができる。したがって、通知部20は、事故発生までの時間を算出し、当該時間に応じて警告の種類を異ならせることとしても良い。
【0037】
なお、上記第1の実施形態では、事故発生までの時間を算出する以外に、事故定義データに、何秒後に発生する事故であるかの情報をあらかじめ紐付けておくことができる。この場合、計算等を行わずに、警告の種類を異ならせることができる。
【0038】
なお、図3の処理では、ステップS20において1つの事故定義データから事故の可能性があると判定された場合に、ステップS22において、事故予測表示を行う場合について説明したが、これに限られるものではない。例えば、すべての事故定義データを用いた事故予測を行って、少なくとも1つの事故定義データにより、事故の可能性があると判定された場合に、事故予測表示を行うこととしても良い。この場合、複数の事故定義データを用いた判定において事故の可能性があると判定される場合がある。このような場合には、通知部20は、事故発生までの時間が短いものから優先的に表示(警告)することができる。
【0039】
≪第2の実施形態≫
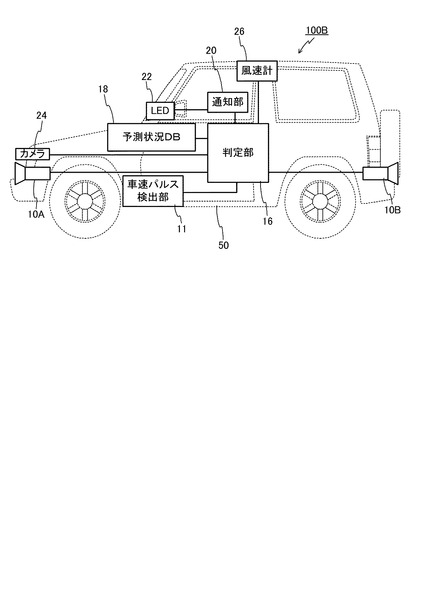
次に、事故発生予測装置の第2の実施形態について、図4〜図6に基づいて説明する。図4には、第2の実施形態に係る事故発生予測装置100Bのブロック図が示されている。本第2の実施形態の事故発生予測装置100Bは、図4と図1とを比較するとわかるように、第1の実施形態の事故発生予測装置100AのGPS装置14に代えて、カメラ24と風速計26とが設けられている。なお、本第2の実施形態では、自動車50の移動方向については不図示のジャイロセンサや方位検出センサにより取得されるものとする。以下、第1の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0040】
カメラ24は、路面状況を撮影し、取得するものである。路面状況としては、例えば、水溜りの有無や凍結、降雨や降雪、濃霧や太陽の角度などの少なくとも1つを含んでいる。風速計26は、自動車50付近の風向き及び風速を取得する。なお、風速計26は、検出される風速と向きから、自動車の進行方向の移動速度を減じることで、実際の風速を算出することができる。
【0041】
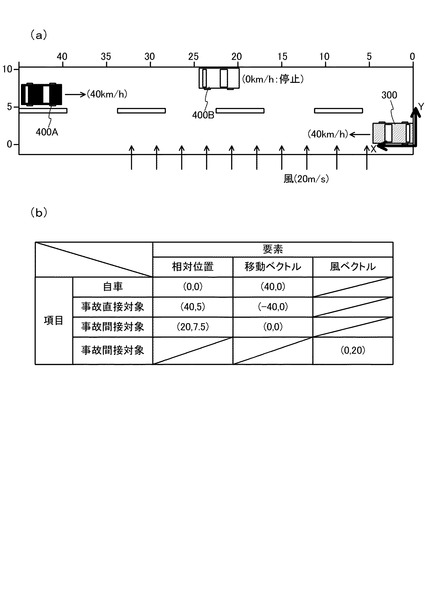
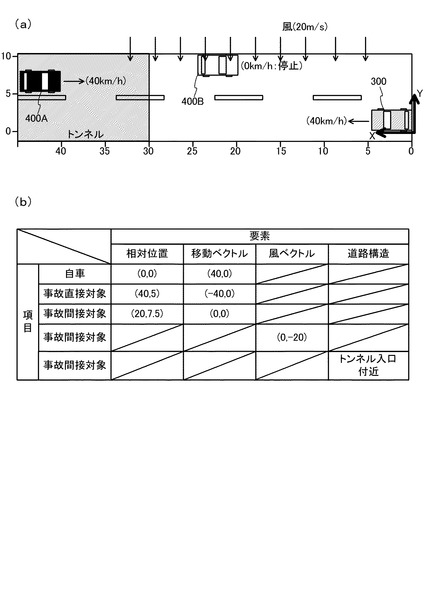
本第2の実施形態では、図5(a)のような将来的に事故が発生する可能性のある状況を、図5(b)に示すような事故定義データとして、予測状況DB18に格納しておくことができる。ここで、図5(a)は、横風が強いため、他車400Aが他車400Bに衝突しないように大きくハンドルを切ってしまい、自車300と他車400Aとが衝突する可能性がある状況を示している。すなわち、図5(a)、図5(b)では、他車400Bと風ベクトル(風向きと風速を含む)が、事故直接対象である他車400Aの移動ベクトルを変動させる要因(事故間接対象)となる。
【0042】
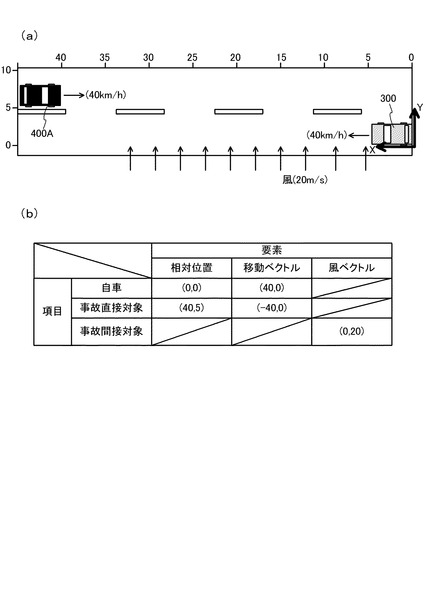
なお、本第2の実施形態では、図6(a)に示す他車400Bが無い状況に関する事故定義データ(図6(b)参照)も作成し、予測状況DB18に格納しておくことができる。図6(b)の事故定義データは、事故間接対象を風ベクトル(風向きと風速を含む)のみとする事故定義データである。
【0043】
なお、風と同様に、路面上の水溜りや凍結なども事故間接対象となりうる。したがって、風に代えて、又は風とともに、路面上の水溜りや凍結の自車との相対位置を事故定義データに含めることとしても良い。
【0044】
本第2の実施形態では、図5(b)や図6(b)のような事故定義データと、ミリ波レーダ10A,10Bやカメラ24、風速計26などにより取得される情報とを比較することで、第1の実施形態と同様、事故予測が可能となる。また、本第2の実施形態では、事故間接対象として自然現象を含めることで、近い将来において事故が起こる可能性があるか否かを的確に判定することができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は、事故を未然に回避することが可能である。
【0045】
≪第3の実施形態≫
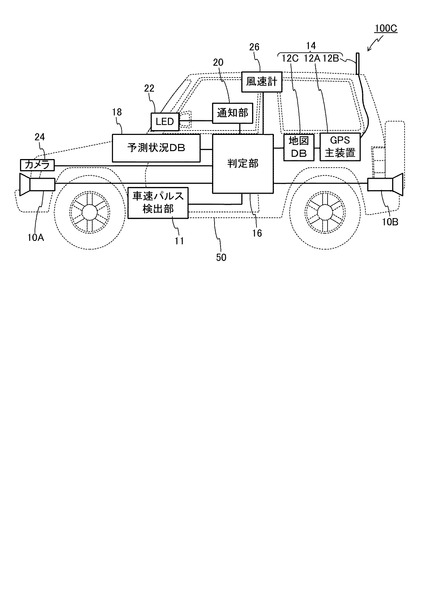
次に、事故発生予測装置の第3の実施形態について、図7、図8に基づいて説明する。図7には、第3の実施形態に係る事故発生予測装置100Cのブロック図が示されている。この図7に示すように、本第3の実施形態の事故発生予測装置100Cは、第2の実施形態の事故発生予測装置100BにGPS装置14を追加した構成を有している。以下、第1、2の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0046】
本第3の実施形態では、例えば、図8(a)のような事故発生状況(トンネルの出口で横風が吹いている状況)を追加した、図8(b)に示すような事故定義データを予測状況DB18に格納しておくことができる。この図8(b)の事故定義データでは、他車400B、風ベクトル(風向きと風速を含む)及び道路構造(トンネル入口付近)が、事故直接対象である他車400Aの移動ベクトルを変動させる要因(事故間接対象)となる。なお、本第3の実施形態では、上述した第1、第2の実施形態と同一の構成を全て兼ね備えているので、図2(c)、図5(b)、図6(b)のような事故定義データも予測状況DB18に格納しておくことができる。
【0047】
本第3の実施形態では、判定部16は、ミリ波レーダ10A,10Bから自車と他車の相対位置の情報を取得する。また、判定部16は、GPS装置14、車速パルス検出部11から自車の移動ベクトルの情報を取得し、ミリ波レーダ10A,10Bから、他車の移動ベクトルの情報を取得する。また、判定部16は、風速計26から風ベクトル、カメラ24から路面状況を取得し、GPS装置14からトンネルの有無などの道路構造を取得する。そして、これら取得した情報と、事故定義データとを、図3と同様の手順で比較することで、近い将来に事故が起きる可能性があるか否かを判定する。
【0048】
このように、本第3の実施形態では、事故間接対象として自然現象や道路構造も含めているので、近い将来において事故が起こる可能性があるか否かを的確に判定することができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は事故を未然に回避することが可能である。
【0049】
≪第4の実施形態≫
次に、事故発生予測装置の第4の実施形態について、図9に基づいて説明する。図9(a)には、第4の実施形態に係る事故発生予測装置100Dのブロック図が示されている。この図9(a)に示すように、本第4の実施形態の事故発生予測装置100Dは、第1の実施形態の事故発生予測装置100AからGPS装置14を除いた構成を有している。以下、第1〜第3の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0050】
本第4の実施形態のような構成を採用した場合、図9(b)に示すような自車、事故直接対象の他車、事故間接対象の他車の相対位置、移動ベクトルが定義された事故定義データを、予測状況DB18に格納する。
【0051】
このような事故定義データを用いることで、事故直接対象の他車の情報のみならず、事故直接対象の他車の移動ベクトルを変動させる事故間接対象の他車の情報を考慮した事故予測ができる。これにより、近い将来に事故が起きる可能性があるか否かの判定を的確に行うことができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は、事故を未然に回避することが可能である。
【0052】
≪第5の実施形態≫
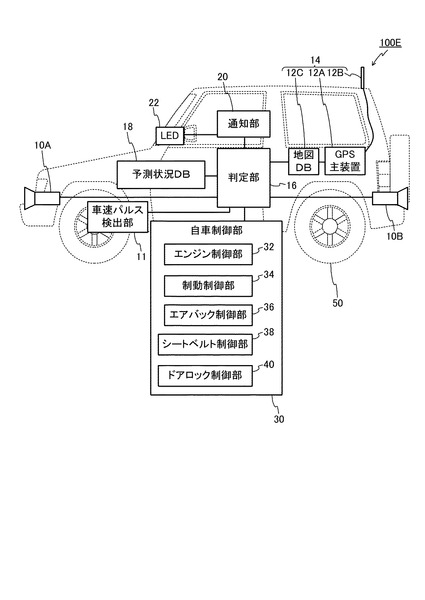
次に、事故発生予測装置の第5の実施形態について、図10に基づいて説明する。図10には、第5の実施形態に係る事故発生予測装置100Eのブロック図が示されている。この図10に示すように、本第5の実施形態の事故発生予測装置100Eでは、第1の実施形態の事故発生予測装置100Aの判定部16に、自車制御部30が接続されている。なお、以下においては、第1〜第4の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0053】
自車制御部30は、エンジン制御部32と、制動制御部34と、エアバック制御部36と、シートベルト制御部38と、ドアロック制御部40と、を有する。本第5の実施形態では、判定部16において近い将来に事故が起きる可能性があると判定された場合に、通知部20がLED22を介して警告を発するのに加えて、自車制御部30の各部の少なくとも1つを制御する。具体的には、エンジン制御部32であれば、事故の発生を未然に防ぐためにエンジン制御部32のエンジン回転数を変更制御する。また、制動制御部34であれば、事故の発生を未然に防ぐために、ブレーキを自動制御する。また、エアバック制御部36であれば、事故が生じたときの運転者等への負荷を軽減するために、エアバックが短時間で作動するように、制御する。また、シートベルト制御部38であれば、事故が生じたときの運転者等への負荷を軽減するために、シートベルトの締め付け強度を大きく制御する。更に、ドアロック制御部40であれば、事故が生じたときの運転者等の車外への飛び出しを防止するためドアロックを自動ロックする制御を行う。
【0054】
このようにすることで、本第5の実施形態では、運転者への警告に加えて、事故回避のための制御を自動で行ったり、事故が起こった場合の安全性向上のための制御を自動で行うことができる。これにより、事故の回避及び/又は事故による被害を軽減することができる。
【0055】
なお、上記第5の実施形態では、通知部20及びLED22による警告と、自車制御部30による自動制御の両方を行う場合について説明したが、これに限らず、自動制御のみを行うこととしても良い。また、判定部16は、警告と自動制御のいずれを行うかを、事故が発生すると予測される時間に応じて選択することとしても良い。
【0056】
また、上記第5の実施形態では、第1の実施形態の判定部16に対して自動制御部30が接続された例について説明したが、これに限らず、第2〜第4の実施形態の判定部16に対して自動制御部30を接続する構成も実現可能である。
【0057】
≪第6の実施形態≫
次に、事故発生予測装置の第6の実施形態について、図11に基づいて説明する。図11には、第6の実施形態に係る事故発生予測装置100Fのブロック図が示されている。この図11に示すように、本第6の実施形態の事故発生予測装置100Fは、自車に搭載されている車載部80と、道路上のインフラ設備に搭載されているインフラ部90とを有する。なお、以下においては、第1〜第4の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0058】
車載部80は、判定部16と、予測状況DB18と、通知部20と、LED22と、通信部42と、通信アンテナ44と、を有する。通信部42は、通信アンテナ44を介して受信した情報を判定部16に送信する機能を有している。なお、予測状況DB18には、図2(c)、図5(b)、図6(b)、図8(b)に示すような事故定義データが格納されているものとする。
【0059】
インフラ部90は、道路上(例えば交差点等)に多数配設されるものであり、自車/他車状況検出センサ102、風速計104、道路形状格納部110、及び通信モジュール108を有している。これら各部は、電柱120などを介して道路上で保持されているものとする。
【0060】
自車/他車状況検出センサ102は、インフラ部90が設置されている場所近傍に位置する自車や他車の位置、速度を検出し、取得するセンサである。当該センサ102としては、ミリ波レーダやステレオビジョンセンサなどを用いることができる。風速計104は、インフラ部90が設置されている場所の風ベクトル(風向き及び風速)を取得するものである。道路形状格納部110は、インフラ部90が設置されている場所近傍の、道路の形状(交差点やカーブなど)を格納している。通信モジュール108は、自車/他車状況検出センサ102、風速計104で取得した情報や、道路形状格納部110に格納されている情報を、周辺に位置する自動車の通信部42に対して送信する。
【0061】
本第6の実施形態では、車載部80の判定部16が、通信部42にて受信した自車や他車の位置及び速度、風ベクトルや道路の形状を、予測状況DB18に格納されている事故定義データと比較して近い将来の事故発生を予測する。そして、判定部16において近い将来に事故が発生する可能性があると判定された場合には、通知部20は、LED22を介して、運転者に対して警告を発する。
【0062】
以上説明したように、本第6の実施形態によると、車載部80の判定部16では、インフラ部90側から送られてきた情報を用いて、事故の発生を予測するので、車載部80に事故判定用のセンサ等を設ける必要がない。これにより、車載部80の構成を簡易にすることができる。
【0063】
なお、上記第6の実施形態では、車載部80に事故判定に必要な情報を取得するためのセンサ等を設けない場合について説明したが、これに限られるものではない。例えば、第1〜第5の実施形態で説明したセンサ等(ミリ波レーダ、車速パルス検出部、GPS装置、風速計、カメラなど)の少なくとも1つを車載部80に設けることとしても良い。この場合、車載部80側に設けたセンサ等と同等の機能を有するインフラ部90の一部構成を省略しても良い。また、上記第6の実施形態では、インフラ部90に、自車/他車状況検出センサ102、風速計104、道路形状格納部110が設けられた場合について説明したが、これに限られるものではない。例えば、風速計104や道路形状格納部110を省略しても良い。また、インフラ部90に、路面の状況を取得するためのカメラを設けても良い。予測状況DB18には、インフラ部90と車載部80のいずれかにおいて取得できる情報と対比可能な事故定義データが格納されていれば良い。
【0064】
なお、上記第6の実施形態においても、判定部16に、第5の実施形態で説明した自車制御部30が接続されていても良い。これにより、第5の実施形態と同様、自動車50において事故回避のための自動制御を行うことが可能となる。
【0065】
≪第7の実施形態≫
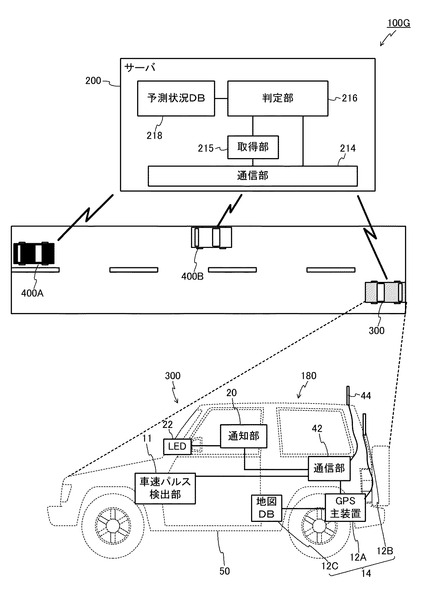
次に、事故発生予測装置の第7の実施形態について、図12に基づいて説明する。図12には、第7の実施形態に係る事故発生予測装置100Gのブロック図が示されている。この図12に示すように、本第7の実施形態の事故発生予測装置100Gは、自車(図12では自車300)に搭載されている車載部180と、車載部180と通信が可能なサーバ200と、を含んでいる。なお、車載部180は、他車400A、400Bにも搭載されているものとする。以下においては、第1〜第6の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0066】
車載部180は、車速パルス検出部11と、通信部42と、通信アンテナ44と、通知部20と、LED22と、GPS装置14と、を有する。車載部180では、車速パルス検出部11において、自動車50の移動速度を検出し、GPS装置14において、自動車50の位置を検出する。
【0067】
サーバ200は、通信部214と、取得部215と、判定部216と、予測状況DB218と、を有する。通信部214は、車載部180の通信部42から通信アンテナ44を介して送信されてくる、自動車50の移動速度及び位置の情報を受信する。取得部215は、通信部214で受信した情報を取得し、判定部216に送る。
【0068】
判定部216は、取得部215から送られてきた自車や他車の情報と、予測状況DB218に格納されている事故定義データとを比較して、近い将来に事故が発生する可能性があるか否かを上記第1〜第6の実施形態と同様にして判定する。そして、判定部216において事故の発生可能性が有ると判定された場合には、通信部214が当該判定結果を、事故において「自車」や「事故直接対象」に該当する自動車に搭載された車載部180に対して送信する。
【0069】
車載部180側では、事故が発生する可能性があるとの判定結果を、通信部42が受信した場合には、通知部20がLED22を介して、運転者に警告を発する。
【0070】
以上説明したように、本第7の実施形態によると、車載部180から自車の位置や移動ベクトルの情報をサーバ200に送り、当該情報を複数の車載部から受信したサーバ200が、事故発生可能性の判定を行う。これにより、上記第1〜第6の実施形態と同様、的確な事故発生可能性の有無の判定を行うことができるとともに、各車載部180に、判定部や予測状況DBを設ける必要がないため車載部180の簡素化を図ることができる。
【0071】
なお、上記第7の実施形態では、車載部180が、第2の実施形態等で説明した風速計やカメラなどを有していても良い。この場合、風速計やカメラなどを用いて取得した情報をサーバ200に送ることで、サーバ200は、これらの情報を更に用いて、事故可能性の有無の判定を行うことができる。
【0072】
なお、上記第7の実施形態においても、判定部16に、第5の実施形態で説明した自車制御部30が接続されていても良い。これにより、第5の実施形態と同様、自動車50において事故回避のための自動制御を行うことが可能となる。
【0073】
なお、上記各実施形態では、事故発生データの相対位置や移動ベクトルがほぼ同一であるか否かにより、近い将来に事故が発生する可能性があるか否かを判定する場合について説明したが、これに限られるものではない。例えば、予測状況DBに格納される事故定義データを、s(sは任意の数)秒後に起きる可能性のある事故の事故定義データと定義付けておいても良い。この場合、相対位置や移動ベクトルが事故定義データに定義された相対位置や移動ベクトルのほぼm倍であった場合には、(s×m)秒後に事故が起きる可能性があると判定することができる。
【0074】
なお、上記各実施形態では、事故定義データとして、自車と他車それぞれの移動ベクトルを定義する場合について説明したが、これに限らず、自車と他車との相対的な移動ベクトルが定義されていても良い。相対的な移動ベクトルを定義することとしても、事故定義データに「自車及び他車の移動ベクトルの情報」が定義されているといえる。このように、相対的な移動ベクトルを定義する場合、自車と他車の相対的な移動ベクトルは、車速パルス検出部を用いなくとも、ミリ波レーダやステレオビジョンセンサのみで検出することができる。
【0075】
なお、上記各実施形態では、自動車50内に設けた処理装置(コンピュータ)が、情報を取得する取得部、判定部、保持部の機能を実現するためのプログラムを実行することによっても、同様の効果を奏する。この場合、処理装置が有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムを処理装置(コンピュータ)で実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0076】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD(Digital Versatile Disc)、CD−ROM(Compact Disc Read Only Memory)などの可搬型記録媒体の形態で販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0077】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0078】
上述した各実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【0079】
なお、以上の説明に関して更に以下の付記を開示する。
(付記1) 自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える事故発生予測装置。
(付記2) 前記判定部による判定結果を前記自車内に表示する表示部、及び前記判定部による判定結果に基づいて、前記自車の状態を変更する変更部の少なくとも一方を更に備える付記1に記載の事故発生予測装置。
(付記3) 前記他車の移動ベクトルを変動させる要因は、前記他車の進路を妨害する物体及び前記他車に影響を与える自然現象の少なくとも一方であることを特徴とする付記1又は2に記載の事故発生予測装置。
(付記4) 前記事故定義は、前記自車と前記他車が位置する道路構造の情報で更に定義され、前記取得部は、前記自車と前記他車が位置する道路構造の情報を更に取得し、前記判定部は、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定することを特徴とする付記1〜3のいずれかに記載の事故発生予測装置。
(付記5) 前記取得部は、前記自車に搭載されたセンサ、前記他車に搭載されたセンサ、前記自車外及び前記他車外に設置されたセンサのいずれかであることを特徴とする付記1〜4のいずれかに記載の事故発生予測装置。
(付記6) 前記保持部、前記取得部、及び前記判定部の少なくとも1つは、前記自車外に設けられていることを特徴とする付記1〜5のいずれかに記載の事故発生予測装置。
(付記7) コンピュータを、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる事故発生予測プログラム。
(付記8) 自車が実際に運転されている状態で、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む事故発生予測方法。
【符号の説明】
【0080】
10A,10B ミリ波レーダ(取得部)
11 車速パルス検出部(取得部)
14 GPS装置(取得部)
16 判定部
18 予測状況DB(保持部)
100A〜100F 事故発生予測装置
【技術分野】
【0001】
本件は、事故発生予測装置、事故発生予測プログラム及び事故発生予測方法に関する。
【背景技術】
【0002】
自動車産業においては、事故を起こさない自動車を実現することは、究極の目標のひとつである。自車が近い将来に他車と事故を起こすか否かの予測を行うためには、自車及び他車が近い将来にどのような状況になっているかを予測する必要がある。従来は、自車及び他車の現在位置と走行ベクトル(速度と走行方向)を取得し、当該走行ベクトルから自車及び他車の一定時間後の位置を予測していた。
【0003】
しかし、上記推定は、自車及び他車が同じ走行ベクトルで走り続けていることを前提とするものである。すなわち、自車及び他車が走行ベクトルを変更するような走行をした場合には予測が外れてしまう。
【0004】
これに対し、特許文献1には、地図情報から対象(自動車)の軌道を推定する技術が開示されている。この技術によれば、道路が直線の場合は直進移動、カーブの場合は道路のカーブに沿って移動、交差点の場合は交差点に進入して移動のように、地図情報(道路形状など)に応じて対象(車)の将来移動位置が推定される。これにより、数秒後において対象が行う可能性のある動きを、1又は複数列挙することができる。
【0005】
また、特許文献2には、過去に発生した交通事故履歴情報をデータベースに保持して、現在の自車の状況とマッチングして事故可能性を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−165555号公報
【特許文献2】特開平11−120478号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1の技術を用いた場合でも、道路形状に依らない車の動きは、推定(予測)することができない。例えば、片側一車線の道路を自車と他車Aがすれ違う際に、他車Bが他車Aの横から飛び出してきた場合、他車Aは他車Bとの衝突を回避するための回避行動を突発的に行う場合がある。この回避行動が、自車の走行する車線へのはみ出しである場合には、自車と他車Aが衝突するおそれがある(もらい事故と呼ばれる)。しかるに、上記特許文献1では、他車Aのような道路形状に依らない車の動きを推定することはできないため、上記のようなもらい事故を回避することができない。
【0008】
なお、特許文献2の技術は、自車の状況(場所、地形、走行速度、交通量、季節、時刻、天候、温度、湿度等の項目)を交通事故履歴情報とマッチングして事故可能性を算出する技術である。しかるに、上記全ての項目が完全に一致することは稀であるため、特許文献2の技術を用いたとしても、事故予測精度を然程高くできないおそれがある。すなわち、事故予測のマッチングに用いる項目を闇雲に多数設定することは、事故予測精度向上の弊害となるおそれがある。
【0009】
そこで本件は上記の課題に鑑みてなされたものであり、道路形状に依らない他車の動きに起因する事故の発生を予測することが可能な事故発生予測装置、事故発生予測プログラム及び事故発生予測方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本明細書に記載の事故発生予測装置は、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える。
【0011】
本明細書に記載の事故発生予測プログラムは、コンピュータを、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる。
【0012】
本明細書に記載の事故発生予測方法は、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む。
【発明の効果】
【0013】
本明細書に記載の事故発生予測装置、事故発生予測プログラム及び事故発生予測方法は、道路形状に依らない他車の動きに起因する事故の発生を予測することができるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】第1の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図2】図2(a)は、事故の発生可能性のある状況を示す図であり、図2(b)は、事故が発生した状態を示す図であり、図2(c)は、第1の実施形態で用いる事故定義データの一例を示す図である。
【図3】第1の実施形態における事故発生予測装置の処理を示すフローチャートである。
【図4】第2の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図5】図5(a)は、事故の発生可能性のある状況の一例を示す図であり、図5(b)は、図5(a)の状況に関する事故定義データを示す図である。
【図6】図6(a)は、事故の発生可能性のある状況の一例を示す図であり、図6(b)は、図6(a)の状況に関する事故定義データを示す図である。
【図7】第3の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図8】図8(a)は、事故の発生可能性のある状況の一例を示す図であり、図8(b)は、図8(a)の状況に関する事故定義データを示す図である。
【図9】図9(a)は、第4の実施形態に係る事故発生予測装置の構成を示すブロック図であり、図9(b)は、第4の実施形態で用いる事故定義データの一例を示す図である。
【図10】第5の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図11】第6の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【図12】第7の実施形態に係る事故発生予測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0015】
≪第1の実施形態≫
以下、事故発生予測装置の第1の実施形態について、図1〜図3に基づいて詳細に説明する。図1には、第1の実施形態に係る事故発生予測装置100Aがブロック図にて示されている。この事故発生予測装置100Aは、自動車50に搭載されている。
【0016】
事故発生予測装置100Aは、図1に示すように、ミリ波レーダ10A,10Bと、車速パルス検出部11と、GPS装置14と、判定部16と、保持部としての予測状況DB18と、通知部20と、LED22と、を備えている。本実施形態では、ミリ波レーダ10A,10B、車速パルス検出部11、及びGPS装置14が、種々の情報を取得する取得部としての機能を有している。
【0017】
ミリ波レーダ10A,10Bは、例えば、自動車50の前側と後側に設けられている。ミリ波レーダ10A,10Bは、自動車50の周辺に存在している物体(自動車や自転車、歩行者のほか、建造物なども含む)の、自動車50との相対位置を検出する。すなわち、ミリ波レーダ10A、10Bは、近い将来に事故を起こす対象となりうる自動車(事故直接対象とも呼ぶ)の相対位置(自車に対する位置)の情報を取得することができる。また、ミリ波レーダ10A、10Bは、事故直接対象の走行に影響を与える要因となる可能性のある物体(事故間接対象)の相対位置(自車に対する位置)の情報を取得することができる。
【0018】
さらに、ミリ波レーダ10A,10Bは、事故直接対象及び事故間接対象の、所定時間における相対位置の変化を得ることができる。すなわち、本第1の実施形態では、ミリ波レーダ10A,10Bは、当該相対位置の変化から、事故直接対象の移動ベクトル(移動速度及び移動方向)と、事故間接対象の移動ベクトルを取得しているともいえる。
【0019】
ここで、図2(a)を用いて、上述した事故直接対象と事故間接対象について具体的に説明する。図2(a)には、近い将来に事故が起きる可能性のある道路状況が模式的に示されている。この図2(a)では、片側一車線の道路上で自車300と他車400Aとがすれ違おうとしているとともに、他車400Aが走行する車線上に他車400Bが停車している状況を示す。この状況では、近い将来の自車300と他車400Aがすれ違うタイミングで、他車400Aが他車400Bを避けようとして自車の走行する車線にはみ出すおそれがある。この場合、図2(b)に示すように、自車300と他車400Aが衝突する可能性がある。すなわち、自車300から見れば、他車400Aは事故直接対象であり、他車400Bは、事故直接対象(400A)の動きを変更させる(移動ベクトルを変動させる)事故間接対象であるといえる。
【0020】
図1に戻り、車速パルス検出部11は、自動車50の車軸の回転数に比例して発生する車速パルスを計測して、自動車50の移動速度を取得する。GPS装置14は、GPS主装置12Aと、GPSアンテナ12Bと、地図DB12Cとを有している。GPS主装置12Aは、GPSアンテナ12Bを介して自動車50の位置情報(緯度、経度)をGPS衛星から取得する。また、GPS主装置12Aは、取得した自動車50の位置情報と、地図DB12Cに格納されている地図データとを用いて、自動車50が位置している道路状況を取得する。この道路状況には、例えば、交差点、直線道路、坂道、カーブ、踏み切りの有無、トンネル入口など、道路形状や道路構造が含まれる。なお、GPS装置14からは自動車50の移動方向も取得できる。当該移動方向は、車速パルス検出部11で取得された移動速度とともに、自動車50の移動ベクトルの算出に用いられる。なお、自動車50にジャイロセンサや方位検出センサなどを設け、これらのセンサを用いて自動車50の移動方向を取得することとしても良い。
【0021】
判定部16は、ミリ波レーダ10A,10Bで取得された事故直接対象及び事故間接対象の相対位置及び移動ベクトルを取得する。また、判定部16は、車速パルス検出部11及びGPS装置14で取得された自車の移動ベクトル、並びにGPS装置14で取得された道路状況を取得する。そして、判定部16は、各情報と、予測状況DB18に格納されている事故予測状況のデータ(以下、事故定義データと呼ぶ)とを比較することで、自車と、事故直接対象との間で、近い将来に事故が起きる可能性があるか否かを判定する。なお、判定部16における判定方法や、予測状況DB18に格納されている事故定義データについては、後に詳述する。
【0022】
通知部20は、判定部16において、事故が近い将来に起きる可能性があると判定された場合に、窓枠等に設けられたLED22を介して、自動車50の運転者に、警告を発する。なお、通知部20は、LED22以外に、複数箇所にハーフミラーや有機ELを設置して情報を投影する技術や、HUD(Head-Up Display)などを用いて、自動車50のフロントガラス上に、警告を表示しても良い。また、その他の方法で、視覚を通じた警告を行っても良い。更に、通知部20は、視覚を通じた警告に限らず、音などによる聴覚を通じた警告や、振動などによる触覚を通じた警告などを行うこととしても良い。
【0023】
図3は、事故発生予測装置100Aによる処理手順を示すフローチャートである。以下、図3に沿って、他の図面を適宜参照しつつ、説明する。
【0024】
図3のステップS10では、予測状況DB18が事故定義データを取得する。この事故定義データとしては、過去の事故事例を分析したデータや、安全運転の教育のためにまとめられている防衛運転や危険予知運転などで扱われている事例のデータなどを用いることができる。例えば、図2(a)のような事例であれば、図2(c)に示すような事故定義データとなる。図2(c)に示す事故定義データでは、自車、事故直接対象、及び事故間接対象の相対位置、移動ベクトルの情報が図2(a)のXY座標を用いて定義される。また、道路構造の情報として、「直線道路」が定義される。このような事故定義データを様々なシチュエーションで予め多数(ここでは、N個とする)用意しておき、ステップS10において予測状況DB18に格納する。様々なシチュエーションには、事故間接対象が自転車や歩行者、障害物などである場合も含み、道路構造が坂道や交差点、カーブなどである場合も含む。なお、ステップS10は、事故発生予測装置100Aが自動車50に搭載される以前に行われても良い。また、事故定義データは、定期的に又は適宜更新されても良い。
【0025】
次いで、図3のステップS12では、GPS装置14が、道路構造の情報を取得する。次いで、ステップS14では、ミリ波レーダ10A,10B、車速パルス検出部11及びGPS装置14が、自車と周辺物体との相対位置の情報、及び自車と他車の移動ベクトルの情報を取得する。
【0026】
次いで、ステップS16では、判定部16が、事故定義データの番号を示すパラメータnを1に設定する。次いで、ステップS18では、判定部16が、ステップS12,S14で取得した相対位置の情報、移動ベクトルの情報、道路構造の情報を取得し、これらの情報とn番目(1番目)の事故定義データとを比較する。この比較において、取得した情報と事故定義データとがほぼ一致している場合には、事故が近い将来に起きる可能性があることを意味する。ここで、取得した情報と事故定義データとが「ほぼ一致する」とは、取得した情報と事故定義データとが完全一致する場合に限らず、取得した情報と事故定義データとの誤差が、予め定めておいた所定範囲内に含まれる場合も含む。例えば、自車300と、他車400A、400Bとが、実際に図2(a)のような状況にある場合で、かつn番目の事故定義データが、図2(c)のようなデータであったとする。この場合、図2(c)の事故定義データと、現在の状況とがほぼ一致することとなるので、判定部16は、図2(b)に示すような自車300と他車(事故直接対象)400Aとの事故が近い将来に起きる可能性があると判断する。
【0027】
なお、ステップS14において取得した情報からは、どの自動車が事故直接対象で、どの自動車が事故間接対象であるかは不明である。したがって、ステップS18の比較においては、他車400Aを事故直接対象にする場合や、他車400Bを事故直接対象にする場合など、全ての可能性について総当りで比較することが考えられる。
【0028】
次いで、ステップS20では、判定部16が近い将来に事故が起きる可能性があるか否かを判断する。ここでの判断が肯定された場合には、ステップS22に移行する。ステップS22では、通知部20がLED22を介して、自車を運転している運転者に対して、近い将来に事故が起きる可能性があることを警告し、ステップS12に戻る。なお、運転者は、当該警告に基づいて、前方に注意を払ったり、場合によってはブレーキを踏んだり、アクセルを戻したり、ハンドルを切ったりすることで、事故を未然に回避することができる。
【0029】
一方、ステップS20の判断が否定された場合には、ステップS24に移行する。ステップS24では、判定部16がnがNであるか否かを判断する。ここで、Nは、前述のように予測状況DB18に格納されている事故定義データの全個数を意味するので、ステップS24では、全ての事故定義データを用いた判定を行ったか否かを判断していることになる。ここでの判断が否定された場合には、ステップS26において、nを1インクリメント(n←n+1)した後、ステップS18に戻る。その後は、ステップS20の判断が肯定されるか、あるいは、ステップS24の判断が肯定されるまで、判定部16は、事故定義データを用いた判定を行う。一方、ステップS26の判断が肯定された場合には、ステップS12に移行する。
【0030】
ステップS12に戻った場合には、新たな状況において、上記と同様にして、取得した情報と、事故定義データとを比較して、近い将来の事故の可能性の判定を繰り返す。
【0031】
以上、詳細に説明したように、本第1の実施形態によると、判定部16は、予測状況DB18が保持する、自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義データと、自車が実際に運転されている状態で、ミリ波レーダ10A,10B、車速パルス検出部11、GPS装置14で取得される自車と他車の位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報と、を比較して、事故が発生する可能性があるか否かを判定する。したがって、判定部16は、直接事故を起こす可能性のある他車のみならず、直接事故を起こす可能性のある他車の移動ベクトルを変動させる要因(本第1の実施形態では、他車400Aの移動ベクトルを変動させる他車400B)の情報についても、事故定義データとの比較を行って事故の可能性を判定する。これにより、本実施形態では、道路形状に依らない他車の動き(移動ベクトルの変動)起因する事故についても、的確に予測することができる。
【0032】
また、本第1の実施形態では、判定部16により近い将来に事故が起きる可能性があると判定されたときに、通知部20が、LED22を介して運転者に警告を発する。したがって、運転者は、警告に従って、前方に注意を払ったり、場合によってはブレーキを踏んだり、アクセルを戻したり、ハンドルを切ったりすることで、事故を未然に回避することができる。
【0033】
また、本第1の実施形態では、事故定義データが自車と他車が位置する道路構造の情報でも定義されており、判定部16が、GPS装置14で取得された道路構造の情報と、事故定義データとの比較も行うことで、事故が発生する可能性があるか否かの判定を行う。このように、交差点やカーブなどの道路構造を更に考慮することで、的確な事故予測を行うことができる。
【0034】
なお、上記第1の実施形態では、ステップS12、S14の実施順を変更しても良いし、ステップS12とS14を同時に行うこととしても良い。
【0035】
また、上記第1の実施形態では、他車の相対位置及び移動ベクトルを取得する装置としてミリ波レーダを採用したが、これに限らず、例えば、カメラ2台を用いるステレオビジョンセンサを採用することとしても良い。また、上記第1の実施形態では、他車の相対位置や移動ベクトルの情報を、共通の装置で取得する場合について説明したが、これに限らず、相対位置と移動ベクトルを別の装置で取得しても良い。
【0036】
なお、上記第1の実施形態では、判定部16は、事故が起きる可能性があると判定した場合、自車と他車との相対距離及び相対速度から、事故発生までの時間を算出することができる。したがって、通知部20は、事故発生までの時間を算出し、当該時間に応じて警告の種類を異ならせることとしても良い。
【0037】
なお、上記第1の実施形態では、事故発生までの時間を算出する以外に、事故定義データに、何秒後に発生する事故であるかの情報をあらかじめ紐付けておくことができる。この場合、計算等を行わずに、警告の種類を異ならせることができる。
【0038】
なお、図3の処理では、ステップS20において1つの事故定義データから事故の可能性があると判定された場合に、ステップS22において、事故予測表示を行う場合について説明したが、これに限られるものではない。例えば、すべての事故定義データを用いた事故予測を行って、少なくとも1つの事故定義データにより、事故の可能性があると判定された場合に、事故予測表示を行うこととしても良い。この場合、複数の事故定義データを用いた判定において事故の可能性があると判定される場合がある。このような場合には、通知部20は、事故発生までの時間が短いものから優先的に表示(警告)することができる。
【0039】
≪第2の実施形態≫
次に、事故発生予測装置の第2の実施形態について、図4〜図6に基づいて説明する。図4には、第2の実施形態に係る事故発生予測装置100Bのブロック図が示されている。本第2の実施形態の事故発生予測装置100Bは、図4と図1とを比較するとわかるように、第1の実施形態の事故発生予測装置100AのGPS装置14に代えて、カメラ24と風速計26とが設けられている。なお、本第2の実施形態では、自動車50の移動方向については不図示のジャイロセンサや方位検出センサにより取得されるものとする。以下、第1の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0040】
カメラ24は、路面状況を撮影し、取得するものである。路面状況としては、例えば、水溜りの有無や凍結、降雨や降雪、濃霧や太陽の角度などの少なくとも1つを含んでいる。風速計26は、自動車50付近の風向き及び風速を取得する。なお、風速計26は、検出される風速と向きから、自動車の進行方向の移動速度を減じることで、実際の風速を算出することができる。
【0041】
本第2の実施形態では、図5(a)のような将来的に事故が発生する可能性のある状況を、図5(b)に示すような事故定義データとして、予測状況DB18に格納しておくことができる。ここで、図5(a)は、横風が強いため、他車400Aが他車400Bに衝突しないように大きくハンドルを切ってしまい、自車300と他車400Aとが衝突する可能性がある状況を示している。すなわち、図5(a)、図5(b)では、他車400Bと風ベクトル(風向きと風速を含む)が、事故直接対象である他車400Aの移動ベクトルを変動させる要因(事故間接対象)となる。
【0042】
なお、本第2の実施形態では、図6(a)に示す他車400Bが無い状況に関する事故定義データ(図6(b)参照)も作成し、予測状況DB18に格納しておくことができる。図6(b)の事故定義データは、事故間接対象を風ベクトル(風向きと風速を含む)のみとする事故定義データである。
【0043】
なお、風と同様に、路面上の水溜りや凍結なども事故間接対象となりうる。したがって、風に代えて、又は風とともに、路面上の水溜りや凍結の自車との相対位置を事故定義データに含めることとしても良い。
【0044】
本第2の実施形態では、図5(b)や図6(b)のような事故定義データと、ミリ波レーダ10A,10Bやカメラ24、風速計26などにより取得される情報とを比較することで、第1の実施形態と同様、事故予測が可能となる。また、本第2の実施形態では、事故間接対象として自然現象を含めることで、近い将来において事故が起こる可能性があるか否かを的確に判定することができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は、事故を未然に回避することが可能である。
【0045】
≪第3の実施形態≫
次に、事故発生予測装置の第3の実施形態について、図7、図8に基づいて説明する。図7には、第3の実施形態に係る事故発生予測装置100Cのブロック図が示されている。この図7に示すように、本第3の実施形態の事故発生予測装置100Cは、第2の実施形態の事故発生予測装置100BにGPS装置14を追加した構成を有している。以下、第1、2の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0046】
本第3の実施形態では、例えば、図8(a)のような事故発生状況(トンネルの出口で横風が吹いている状況)を追加した、図8(b)に示すような事故定義データを予測状況DB18に格納しておくことができる。この図8(b)の事故定義データでは、他車400B、風ベクトル(風向きと風速を含む)及び道路構造(トンネル入口付近)が、事故直接対象である他車400Aの移動ベクトルを変動させる要因(事故間接対象)となる。なお、本第3の実施形態では、上述した第1、第2の実施形態と同一の構成を全て兼ね備えているので、図2(c)、図5(b)、図6(b)のような事故定義データも予測状況DB18に格納しておくことができる。
【0047】
本第3の実施形態では、判定部16は、ミリ波レーダ10A,10Bから自車と他車の相対位置の情報を取得する。また、判定部16は、GPS装置14、車速パルス検出部11から自車の移動ベクトルの情報を取得し、ミリ波レーダ10A,10Bから、他車の移動ベクトルの情報を取得する。また、判定部16は、風速計26から風ベクトル、カメラ24から路面状況を取得し、GPS装置14からトンネルの有無などの道路構造を取得する。そして、これら取得した情報と、事故定義データとを、図3と同様の手順で比較することで、近い将来に事故が起きる可能性があるか否かを判定する。
【0048】
このように、本第3の実施形態では、事故間接対象として自然現象や道路構造も含めているので、近い将来において事故が起こる可能性があるか否かを的確に判定することができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は事故を未然に回避することが可能である。
【0049】
≪第4の実施形態≫
次に、事故発生予測装置の第4の実施形態について、図9に基づいて説明する。図9(a)には、第4の実施形態に係る事故発生予測装置100Dのブロック図が示されている。この図9(a)に示すように、本第4の実施形態の事故発生予測装置100Dは、第1の実施形態の事故発生予測装置100AからGPS装置14を除いた構成を有している。以下、第1〜第3の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0050】
本第4の実施形態のような構成を採用した場合、図9(b)に示すような自車、事故直接対象の他車、事故間接対象の他車の相対位置、移動ベクトルが定義された事故定義データを、予測状況DB18に格納する。
【0051】
このような事故定義データを用いることで、事故直接対象の他車の情報のみならず、事故直接対象の他車の移動ベクトルを変動させる事故間接対象の他車の情報を考慮した事故予測ができる。これにより、近い将来に事故が起きる可能性があるか否かの判定を的確に行うことができる。また、当該判定に応じて、通知部20が運転者に対して警告を発することで、運転者は、事故を未然に回避することが可能である。
【0052】
≪第5の実施形態≫
次に、事故発生予測装置の第5の実施形態について、図10に基づいて説明する。図10には、第5の実施形態に係る事故発生予測装置100Eのブロック図が示されている。この図10に示すように、本第5の実施形態の事故発生予測装置100Eでは、第1の実施形態の事故発生予測装置100Aの判定部16に、自車制御部30が接続されている。なお、以下においては、第1〜第4の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0053】
自車制御部30は、エンジン制御部32と、制動制御部34と、エアバック制御部36と、シートベルト制御部38と、ドアロック制御部40と、を有する。本第5の実施形態では、判定部16において近い将来に事故が起きる可能性があると判定された場合に、通知部20がLED22を介して警告を発するのに加えて、自車制御部30の各部の少なくとも1つを制御する。具体的には、エンジン制御部32であれば、事故の発生を未然に防ぐためにエンジン制御部32のエンジン回転数を変更制御する。また、制動制御部34であれば、事故の発生を未然に防ぐために、ブレーキを自動制御する。また、エアバック制御部36であれば、事故が生じたときの運転者等への負荷を軽減するために、エアバックが短時間で作動するように、制御する。また、シートベルト制御部38であれば、事故が生じたときの運転者等への負荷を軽減するために、シートベルトの締め付け強度を大きく制御する。更に、ドアロック制御部40であれば、事故が生じたときの運転者等の車外への飛び出しを防止するためドアロックを自動ロックする制御を行う。
【0054】
このようにすることで、本第5の実施形態では、運転者への警告に加えて、事故回避のための制御を自動で行ったり、事故が起こった場合の安全性向上のための制御を自動で行うことができる。これにより、事故の回避及び/又は事故による被害を軽減することができる。
【0055】
なお、上記第5の実施形態では、通知部20及びLED22による警告と、自車制御部30による自動制御の両方を行う場合について説明したが、これに限らず、自動制御のみを行うこととしても良い。また、判定部16は、警告と自動制御のいずれを行うかを、事故が発生すると予測される時間に応じて選択することとしても良い。
【0056】
また、上記第5の実施形態では、第1の実施形態の判定部16に対して自動制御部30が接続された例について説明したが、これに限らず、第2〜第4の実施形態の判定部16に対して自動制御部30を接続する構成も実現可能である。
【0057】
≪第6の実施形態≫
次に、事故発生予測装置の第6の実施形態について、図11に基づいて説明する。図11には、第6の実施形態に係る事故発生予測装置100Fのブロック図が示されている。この図11に示すように、本第6の実施形態の事故発生予測装置100Fは、自車に搭載されている車載部80と、道路上のインフラ設備に搭載されているインフラ部90とを有する。なお、以下においては、第1〜第4の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0058】
車載部80は、判定部16と、予測状況DB18と、通知部20と、LED22と、通信部42と、通信アンテナ44と、を有する。通信部42は、通信アンテナ44を介して受信した情報を判定部16に送信する機能を有している。なお、予測状況DB18には、図2(c)、図5(b)、図6(b)、図8(b)に示すような事故定義データが格納されているものとする。
【0059】
インフラ部90は、道路上(例えば交差点等)に多数配設されるものであり、自車/他車状況検出センサ102、風速計104、道路形状格納部110、及び通信モジュール108を有している。これら各部は、電柱120などを介して道路上で保持されているものとする。
【0060】
自車/他車状況検出センサ102は、インフラ部90が設置されている場所近傍に位置する自車や他車の位置、速度を検出し、取得するセンサである。当該センサ102としては、ミリ波レーダやステレオビジョンセンサなどを用いることができる。風速計104は、インフラ部90が設置されている場所の風ベクトル(風向き及び風速)を取得するものである。道路形状格納部110は、インフラ部90が設置されている場所近傍の、道路の形状(交差点やカーブなど)を格納している。通信モジュール108は、自車/他車状況検出センサ102、風速計104で取得した情報や、道路形状格納部110に格納されている情報を、周辺に位置する自動車の通信部42に対して送信する。
【0061】
本第6の実施形態では、車載部80の判定部16が、通信部42にて受信した自車や他車の位置及び速度、風ベクトルや道路の形状を、予測状況DB18に格納されている事故定義データと比較して近い将来の事故発生を予測する。そして、判定部16において近い将来に事故が発生する可能性があると判定された場合には、通知部20は、LED22を介して、運転者に対して警告を発する。
【0062】
以上説明したように、本第6の実施形態によると、車載部80の判定部16では、インフラ部90側から送られてきた情報を用いて、事故の発生を予測するので、車載部80に事故判定用のセンサ等を設ける必要がない。これにより、車載部80の構成を簡易にすることができる。
【0063】
なお、上記第6の実施形態では、車載部80に事故判定に必要な情報を取得するためのセンサ等を設けない場合について説明したが、これに限られるものではない。例えば、第1〜第5の実施形態で説明したセンサ等(ミリ波レーダ、車速パルス検出部、GPS装置、風速計、カメラなど)の少なくとも1つを車載部80に設けることとしても良い。この場合、車載部80側に設けたセンサ等と同等の機能を有するインフラ部90の一部構成を省略しても良い。また、上記第6の実施形態では、インフラ部90に、自車/他車状況検出センサ102、風速計104、道路形状格納部110が設けられた場合について説明したが、これに限られるものではない。例えば、風速計104や道路形状格納部110を省略しても良い。また、インフラ部90に、路面の状況を取得するためのカメラを設けても良い。予測状況DB18には、インフラ部90と車載部80のいずれかにおいて取得できる情報と対比可能な事故定義データが格納されていれば良い。
【0064】
なお、上記第6の実施形態においても、判定部16に、第5の実施形態で説明した自車制御部30が接続されていても良い。これにより、第5の実施形態と同様、自動車50において事故回避のための自動制御を行うことが可能となる。
【0065】
≪第7の実施形態≫
次に、事故発生予測装置の第7の実施形態について、図12に基づいて説明する。図12には、第7の実施形態に係る事故発生予測装置100Gのブロック図が示されている。この図12に示すように、本第7の実施形態の事故発生予測装置100Gは、自車(図12では自車300)に搭載されている車載部180と、車載部180と通信が可能なサーバ200と、を含んでいる。なお、車載部180は、他車400A、400Bにも搭載されているものとする。以下においては、第1〜第6の実施形態と同一の構成については、説明を省略又は簡略化するものとする。
【0066】
車載部180は、車速パルス検出部11と、通信部42と、通信アンテナ44と、通知部20と、LED22と、GPS装置14と、を有する。車載部180では、車速パルス検出部11において、自動車50の移動速度を検出し、GPS装置14において、自動車50の位置を検出する。
【0067】
サーバ200は、通信部214と、取得部215と、判定部216と、予測状況DB218と、を有する。通信部214は、車載部180の通信部42から通信アンテナ44を介して送信されてくる、自動車50の移動速度及び位置の情報を受信する。取得部215は、通信部214で受信した情報を取得し、判定部216に送る。
【0068】
判定部216は、取得部215から送られてきた自車や他車の情報と、予測状況DB218に格納されている事故定義データとを比較して、近い将来に事故が発生する可能性があるか否かを上記第1〜第6の実施形態と同様にして判定する。そして、判定部216において事故の発生可能性が有ると判定された場合には、通信部214が当該判定結果を、事故において「自車」や「事故直接対象」に該当する自動車に搭載された車載部180に対して送信する。
【0069】
車載部180側では、事故が発生する可能性があるとの判定結果を、通信部42が受信した場合には、通知部20がLED22を介して、運転者に警告を発する。
【0070】
以上説明したように、本第7の実施形態によると、車載部180から自車の位置や移動ベクトルの情報をサーバ200に送り、当該情報を複数の車載部から受信したサーバ200が、事故発生可能性の判定を行う。これにより、上記第1〜第6の実施形態と同様、的確な事故発生可能性の有無の判定を行うことができるとともに、各車載部180に、判定部や予測状況DBを設ける必要がないため車載部180の簡素化を図ることができる。
【0071】
なお、上記第7の実施形態では、車載部180が、第2の実施形態等で説明した風速計やカメラなどを有していても良い。この場合、風速計やカメラなどを用いて取得した情報をサーバ200に送ることで、サーバ200は、これらの情報を更に用いて、事故可能性の有無の判定を行うことができる。
【0072】
なお、上記第7の実施形態においても、判定部16に、第5の実施形態で説明した自車制御部30が接続されていても良い。これにより、第5の実施形態と同様、自動車50において事故回避のための自動制御を行うことが可能となる。
【0073】
なお、上記各実施形態では、事故発生データの相対位置や移動ベクトルがほぼ同一であるか否かにより、近い将来に事故が発生する可能性があるか否かを判定する場合について説明したが、これに限られるものではない。例えば、予測状況DBに格納される事故定義データを、s(sは任意の数)秒後に起きる可能性のある事故の事故定義データと定義付けておいても良い。この場合、相対位置や移動ベクトルが事故定義データに定義された相対位置や移動ベクトルのほぼm倍であった場合には、(s×m)秒後に事故が起きる可能性があると判定することができる。
【0074】
なお、上記各実施形態では、事故定義データとして、自車と他車それぞれの移動ベクトルを定義する場合について説明したが、これに限らず、自車と他車との相対的な移動ベクトルが定義されていても良い。相対的な移動ベクトルを定義することとしても、事故定義データに「自車及び他車の移動ベクトルの情報」が定義されているといえる。このように、相対的な移動ベクトルを定義する場合、自車と他車の相対的な移動ベクトルは、車速パルス検出部を用いなくとも、ミリ波レーダやステレオビジョンセンサのみで検出することができる。
【0075】
なお、上記各実施形態では、自動車50内に設けた処理装置(コンピュータ)が、情報を取得する取得部、判定部、保持部の機能を実現するためのプログラムを実行することによっても、同様の効果を奏する。この場合、処理装置が有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムを処理装置(コンピュータ)で実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0076】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD(Digital Versatile Disc)、CD−ROM(Compact Disc Read Only Memory)などの可搬型記録媒体の形態で販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0077】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0078】
上述した各実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【0079】
なお、以上の説明に関して更に以下の付記を開示する。
(付記1) 自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える事故発生予測装置。
(付記2) 前記判定部による判定結果を前記自車内に表示する表示部、及び前記判定部による判定結果に基づいて、前記自車の状態を変更する変更部の少なくとも一方を更に備える付記1に記載の事故発生予測装置。
(付記3) 前記他車の移動ベクトルを変動させる要因は、前記他車の進路を妨害する物体及び前記他車に影響を与える自然現象の少なくとも一方であることを特徴とする付記1又は2に記載の事故発生予測装置。
(付記4) 前記事故定義は、前記自車と前記他車が位置する道路構造の情報で更に定義され、前記取得部は、前記自車と前記他車が位置する道路構造の情報を更に取得し、前記判定部は、前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定することを特徴とする付記1〜3のいずれかに記載の事故発生予測装置。
(付記5) 前記取得部は、前記自車に搭載されたセンサ、前記他車に搭載されたセンサ、前記自車外及び前記他車外に設置されたセンサのいずれかであることを特徴とする付記1〜4のいずれかに記載の事故発生予測装置。
(付記6) 前記保持部、前記取得部、及び前記判定部の少なくとも1つは、前記自車外に設けられていることを特徴とする付記1〜5のいずれかに記載の事故発生予測装置。
(付記7) コンピュータを、自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる事故発生予測プログラム。
(付記8) 自車が実際に運転されている状態で、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む事故発生予測方法。
【符号の説明】
【0080】
10A,10B ミリ波レーダ(取得部)
11 車速パルス検出部(取得部)
14 GPS装置(取得部)
16 判定部
18 予測状況DB(保持部)
100A〜100F 事故発生予測装置
【特許請求の範囲】
【請求項1】
自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、
前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、
前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える事故発生予測装置。
【請求項2】
前記他車の移動ベクトルを変動させる要因は、前記他車の進路を妨害する物体及び前記他車に影響を与える自然現象の少なくとも一方であることを特徴とする請求項1に記載の事故発生予測装置。
【請求項3】
前記取得部は、前記自車に搭載されたセンサ、前記他車に搭載されたセンサ、前記自車外及び前記他車外に設置されたセンサのいずれかであることを特徴とする請求項1又は2に記載の事故発生予測装置。
【請求項4】
前記保持部、前記取得部、及び前記判定部の少なくとも1つは、前記自車外に設けられていることを特徴とする請求項1〜3のいずれか一項に記載の事故発生予測装置。
【請求項5】
コンピュータを、
自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び
前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる事故発生予測プログラム。
【請求項6】
自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、
前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む事故発生予測方法。
【請求項1】
自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する保持部と、
前記自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部と、
前記取得部で取得された情報と、前記事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部と、を備える事故発生予測装置。
【請求項2】
前記他車の移動ベクトルを変動させる要因は、前記他車の進路を妨害する物体及び前記他車に影響を与える自然現象の少なくとも一方であることを特徴とする請求項1に記載の事故発生予測装置。
【請求項3】
前記取得部は、前記自車に搭載されたセンサ、前記他車に搭載されたセンサ、前記自車外及び前記他車外に設置されたセンサのいずれかであることを特徴とする請求項1又は2に記載の事故発生予測装置。
【請求項4】
前記保持部、前記取得部、及び前記判定部の少なくとも1つは、前記自車外に設けられていることを特徴とする請求項1〜3のいずれか一項に記載の事故発生予測装置。
【請求項5】
コンピュータを、
自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得部、及び
前記取得部で取得された情報と、自車と他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部、として機能させる事故発生予測プログラム。
【請求項6】
自車が実際に運転されている状態で、前記自車と他車の位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報を取得する取得工程と、
前記自車と前記他車の間で事故が発生する可能性のある状態を、前記自車と他車の相対位置の情報、前記自車及び前記他車の移動ベクトルの情報、及び前記他車の移動ベクトルを変動させる要因の情報で定義した事故定義と、前記取得工程で取得された情報とを比較して、事故が発生する可能性があるか否かを判定する判定工程と、を含む事故発生予測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−113150(P2011−113150A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−266817(P2009−266817)
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]