
二次元位置検出装置
【課題】従来のこの種の手振り式の入力装置においては、多次元の検出が要求されると、多数の発光素子、受光素子を配置しなければならないものとなり、検出部、演算部共に煩雑化、大型化、高コストとなる問題点を生じていた。
【解決手段】本発明により、光学部品を有する1つの発光素子と、2つの受光素子とから成り、受光素子の一方には、発光素子を中心とする略扇状とした照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性を持たせ、他方の受光素子の受光感度特性との演算により、照射範囲内での発光素子からの遠近方向への移動量、及び、それと直交方向への移動量の二次元移動量もしくは位置検出を可能としする二次元位置検出装置として部品点数を低減し、課題を解決する。
【解決手段】本発明により、光学部品を有する1つの発光素子と、2つの受光素子とから成り、受光素子の一方には、発光素子を中心とする略扇状とした照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性を持たせ、他方の受光素子の受光感度特性との演算により、照射範囲内での発光素子からの遠近方向への移動量、及び、それと直交方向への移動量の二次元移動量もしくは位置検出を可能としする二次元位置検出装置として部品点数を低減し、課題を解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、所定の範囲に投射されている光線中で所定の方向に指などを動かすことで、直接に操作ダイヤルなどに手を触れることなく所望の動作を行わせようとするものであり、操作ダイヤルなどを設けることなく、車室内の操作機器の配置の整理が可能となり、車室内面積の有効利用を可能とするものである。
【背景技術】
【0002】
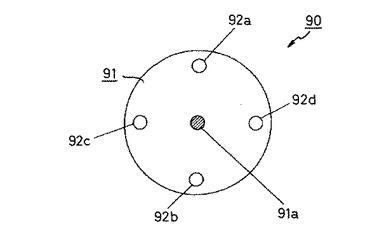
従来の、この種の光と、手の動きにより(以下、手振り式と称する)車載装置を制御するものとした入力装置90の構成の例を示すものが図12〜図14であり、先ず、この手振り式入力装置90の中心には1つの受光素子91aが設置され、垂直方向には前記受光素子91aを挟んで一対の発光素子92a、92bが設置され、水平方向には同様に前記受光素子91aを挟んで一対の発光素子92c、92dが設置された検出部91が車室内などの適宜な位置に設けられている。
【0003】
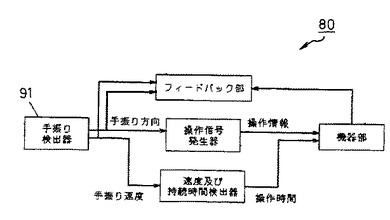
そして、この検出部91からの出力は図13に示すような制御回路80に入力される。このときに、例えば、前記検出部91の水平方向、向かって右から左に手を振れば、受光素子91aには、発光素子92c、発光素子92dの順に光が入射するものとなり、例えば、発光素子92cと発光素子92dとの点灯周波数を変えておけば、制御回路80は発光素子92c→発光素子92dの順に光が入射したことが容易に判定できるものとなる。
【0004】
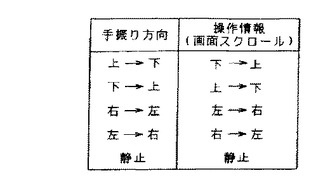
そして、図14に示すように制御回路80は手振り方向が右から左であった場合には、カーナビゲーションシステムなどの画面を左から右にスクロールさせる。このようにすることで自動車の進行方向に向かい手を振れば、今後の進行方向が表示されるものとなり、前方から視線を逸らすことなく手の動きだけで画面の移動ができるものとなる。
【特許文献1】特開平11−044703号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来の手振り式の車載装置においては、4個の発光素子92a〜92dと1個の受光素子とで合計5個の素子を使用しているにも拘わらず、一度の操作では一方向への画面のスクロールしか制御できず、装置の規模の割には可能な動作が少ないという問題点を生じている。
【0006】
また、このように4個もの発光素子92a〜92dを近接して設置した場合には、前方で振られる手が、僅かでも傾くと、例えば、発光素子92aからの光に続いて、発光素子92dからの光が入射するなどの状態を生じやすく、これによる誤動作を防止するために制御回路80の構成が煩雑化するなどの問題も生じるものとなる。
【課題を解決するための手段】
【0007】
本発明は、上記した従来の課題を解決するための具体的手段としてて略扇状の照射範囲を有し、この照射範囲をもって操作範囲とし、光学部品を有する少なくとも1つの発光素子と、前記発光素子からの照射範囲と受光範囲を重ね、光学部品を有する少なくとも2つの受光素子とからなり、前記照射範囲内に挿入された所定の物体からの反射光により前記物体の移動、若しくは、位置検出を行う二次元位置検出装置であって、前記受光素子の少なくとも一方には、前記発光素子を中心とする略扇状とした前記照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性をもたせ、他方の受光素子の受光感度特性との演算により、前記照射範囲内での前記発光素子からの遠近方向への移動量、および、これと直交する方向への移動量の二次元方向の移動、若しくは、位置検出を可能とすることを特徴とする二次元位置検出装置、を提供することで課題を解決するものである。
【発明の効果】
【0008】
本発明により、光学部品を有する1つの発光素子で略扇状とした照射範囲を形成し、光学部品を有する2つの受光素子で前記照射範囲に挿入された指などからの反射光の位置を演算することで、前記指の前記照射範囲内における左右方向と前後方向との存在位置が知れるものとなり、よって、左右方向と前後方向とに割り付けることで2種類の要素を制御することが可能となり、機能向上とコストダウンとが可能となる。
【発明を実施するための最良の形態】
【0009】
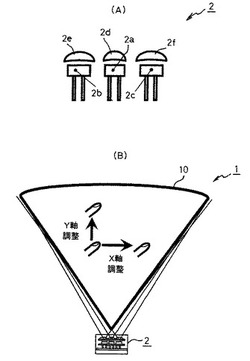
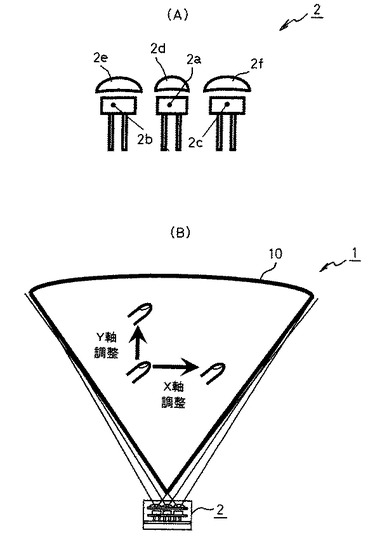
つぎに、本発明を図に示す実施形態に基づいて詳細に説明する。図1(A)に示すものは、本発明に係る二次元位置検出装置1の検出部2であり、この検出部2は1つの発光素子2aと2つの受光素子2b、2cと、これら発光素子2a、受光素子2b、2cからの光に所定の形状、および、輝度特性を与える1つの発光用光学部品2dと、2つの受光用光学部品2e、2fとから構成されている。そして、それぞれの光学素子2a、2b、2c、光学部品2d,2e、2fにより図1(B)に示すように、略同一形状の略扇状の範囲に照射配光、および、受光感度を有するようにされている。
【0010】
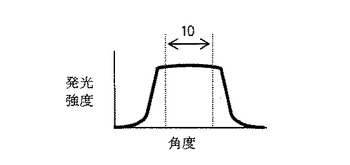
前記発光用光学部品2dは、前記発光素子2aが発光する光を制御することを目的とするものであり、ここでは、前記発光用光学部品2dは、前記発光素子2aを中心とする略扇状の形状の操作範囲10に光を配布すると共に、前記扇状の形状に配布された光は、図2に示すように前記発光素子2aを中心とする略同心円状の照射配光特性を有するものとされている。
【0011】
また、前記受光用光学部品2eは、図1(A)に示す状態で前記発光素子2aの向かって左側に設置された受光素子2bに取付けられるものであり、前記発光用光学部品2dが発光素子2aからの光を配布する略扇状の範囲の中に、例えば指など光を反射する物体が挿入されたときに生じる反射光を受光するものとされている。
【0012】
同様に、前記発光素子2aの向かって右側に設置された受光素子2cにも受光用光学部品2fが取付けられていて発光素子2aからの光を配布する略扇状の範囲の中に、光を反射する物体が挿入されたときには、その反射光を受光素子2cに与え出力を生じさせるものとされている。
【0013】
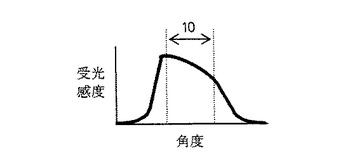
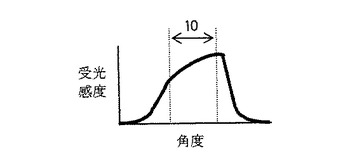
ここで、前記受光用光学部品2eと、受光用光学部品2fとは、上記した発光素子2aからの光が配布される略扇状の範囲内での受光感度に入射角に対応する感度差を設けるものであり、例えば、発光素子2aの左側に設置されている受光素子2bは、図3にも示すように操作範囲10内では左上側方向から入射する光ほど高出力が得られ、右側に設置される受光素子2cは、図4に示すように操作範囲10内では右上側方向から入射する光ほど高出力が得られるようになど、位置(入射角)と出力との間に特定の相関性を有するようにされている。
【0014】
尚、上記のように光が受光素子2b、2cに入射する方向と、その方向に対応する出力とに相関を有するものとすれば、大部分の場合において、受光素子2bと受光素子2cとの出力差が大きくとれるものとなり、微細な調整が可能となるが、それ程に正確な調整が必要とされない場合には、何れか一方の受光素子(2b、2c)は、図2に示したように素子を中心として同心円状の感度を有するものとしても良い。
【0015】
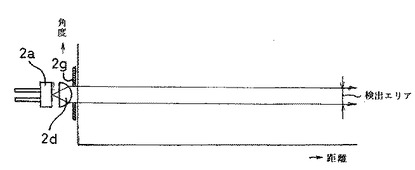
また、前記発光用光学部品2d、および、受光用光学部品2e、2fは、前記操作範囲10が形成されているのと直交する方向には、コリメート化、または、スリット2gを用いるなど適宜の手段を用いることで、図5に示すように、光が薄い板状として放射されるものとされ、指の先など常時に身近にあり使用可能なものでの操作が可能な状態とされている。
【0016】
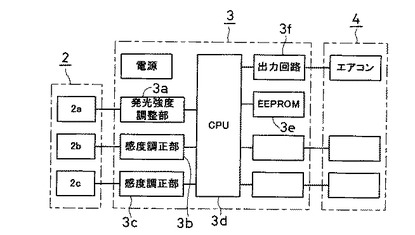
尚、発光素子2a、受光素子2b、2cを設置する位置は上記説明に限定されるものではなく、要は、指などで反射する前記発光素子2aからの光で、前記受光素子2b、2cに所定の出力電流が得られればよいものであり、上記した配置の順序を限定するものではない。以上が、本発明の二次元位置検出装置の検出部2の構成であり、本発明では、前記検出部2に、図6に示すような演算部3、および、出力部4を取付けて所望の動作を行わせるものとしている。
【0017】
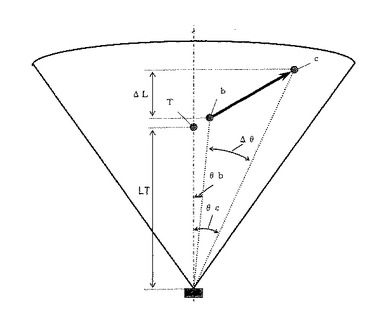
図7は、前記操作範囲10内で発光素子2aに対して指を動かしたときの、指の動いた距離の演算手順の一例を示すものであり、先ず、操作範囲10内の発光素子2aから距離LTの位置に基準点Tを設定しておく。このときの、前記点Tに指を挿入したときの受光素子2bの受光量をPbt、受光素子2cの受光量をPctとし、距離LTと受光量和(Pbt+Pct)、角度θTと受光量比(Pbt/Pct)の相関が判るように予めにメモリーに記憶しておく。
◎距離と受光量和の相関値γ(L)=距離(LT)/受光量和(Pbt+Pct)
◎角度と受光量比の相関値γ(θ)=角度(θT)/受光量比(Pbt/Pct)
【0018】
前記操作範囲10内の任意の点Sにおける受光素子2bの受光量をPbs、受光素子2cの受光量をPcsとしたとき、距離LS、角度θSは、下式により算出することができる。
◎LS=γ(L)×(Pbs+Pcs)
◎θS=γ(θ)×(Pbs/Pcs)
【0019】
使用に当たっては、基準点Tを狙い指を挿入し(この場合、多くは実際には点Tからはずれて、その近傍である点bなどに指を挿入するものとなる)、このときの角度をθb、受光素子2b、2cの受光量のそれぞれ、Pbb、Pcbを測定する。
【0020】
非検出物(指)の反射率・形状が、予めメモリーに記憶していたデーターの元となる指の反射率・形状と異なることが予想されるので、受光量和(Pbb+Pcb)が受光量和(Pbt+Pct)となるようにキャリブレーションを行い、距離LTとする。(基準点がずれた分、検出エリアと分解能に多少の誤差を生じるが、本発明の装置自体が指で操作するレベルであるので、誤差的には実質的な支障を生じることはない。キャリブレーションは、図6の演算処理部3dからの信号により、発光強度調整部3a、若しくは、感度調整部3b、3cによって行われる。
【0021】
つぎに点cに指を動かした後の角度θc、受光素子2b、2cの受光量、それぞれPbc、Pccを測定する。X成分(角度)、Y成分(距離)それぞれの変化量Δθ、ΔLを計算し、検出量とする。
X成分:Δθ=(θc−θb)=γ(θ)×{(Pbc/Pcc)−(Pbb/Pcb)}
Y成分:ΔL=(Lc−Lb)=γ(L)×{(Pbc+Pcc)−(Pbb+Pcb)}
【0022】
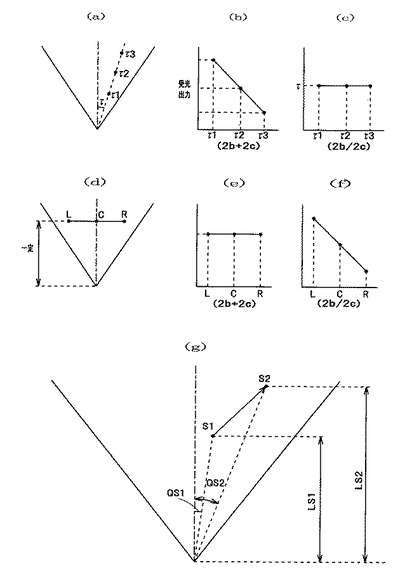
図8において、図8aは、前記操作範囲10内で角度τ上を指が移動したときの3点τ1、τ2、τ3を示す。図8bは、τ1→τ2→τ3を指が移動したときの受光素子の受光量和(Pb+Pc)を示し、光学素子から離れるにつれて暫減する特性を示す。図8cは、τ1→τ2→τ3を指が移動したときの受光素子2b、2cの受光量比(Pb/Pc)を示し、光学素子からの距離に係わらず、一定の値となる特性を示す。よって、角度は距離に係わらず検出することができる。
【0023】
図8dは、前記操作範囲10内で指が左から右へ水平移動したときの3点L、C、Rを示す。図8eは、L→C→Rを指が移動したときの受光素子2b、2cの受光量和(Pb+Pc)を示し、水平方向の位置に係わらず、一定の値となる特性を示す。図8fは、L→C→Rを指が移動したときの受光素子2b、2cの受光量比(Pb/Pc)を示し、右方向に移動するにつれ、暫減する特性を示す。よって、垂直距離は角度に係わらず検出することができる。よって、前記操作範囲10内における指の位置は、上記の角度検出、垂直距離検出により判定でき、指の移動量も、2点間の検出値の差をもって確認することができる。
【0024】
図8gは、前記操作範囲10内で指が点S1から点S2に、斜めに移動したときの状態を示す。点S1での角度、垂直距離検出がθs1、Ls1,点S2での角度、垂直距離検出がθs2、Ls2であったとき、角度変化量Δθ、垂直距離変化量ΔLは下式で表すことができる。
Δθ=θs2−θs1
ΔL=Ls2−Ls1
【0025】
図9は本発明の第二の実施例であり、本発明の二次元位置検出装置1は操作範囲10中で指を水平方向、垂直方向に移動させることで、例えばカーエアコンの設定温度と風量との双方をそれぞれ独立に調整可能とするものである。
【0026】
しかしながら、上記にも説明したように、本発明の二次元位置検出装置1は発光素子2aからの光が指で反射し、受光素子2b、2cに達したときの光の強さで、受光素子2b、2cからの出力電流が決定され、その出力電流に基づいて指などの移動量を演算するものであるので、例えば、指の太さの違い、反射率の違いなどにより演算結果に相違を生じる可能性がある。
【0027】
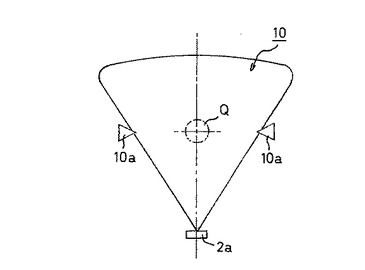
よって、本発明の二次元位置検出装置1においては、例えば、略扇状とされたは操作範囲10中の発光素子2aの正面で且つ中央近傍を指示する指標10aなどを設けておき、使用を開始する前に、前記指標10aに合わせて指Qを挿入すれば、受光素子2b、2cに規定の出力が得られるように前記演算部3の発光強度調整部3aによって発光素子2aに印加する電流を調整してキャリブレーションを行う、若しくは、受光素子2b、2cから出力される電流を調整してキャリブレーションを行う。
【0028】
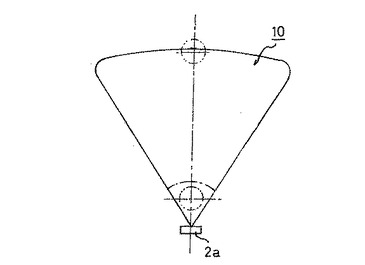
図10は本発明の第三の実施例であり、例えば、操作範囲10の中心線近傍、即ち、発光素子2aの正面の外端、若しくは、外端寄りに指Q(位置QOと称す)を置いたときと、前記発光素子2a寄りに指Q(位置QIと称す)を置いたときの2つの出力電流値が、例えば、外部記憶部3eに記憶されている。尚、前記2つの出力電流値は受光素子2bのものでも受光素子2cのものであっても良く、また、両受光素子2b、2cの合算値であっても良い。
【0029】
このときに、前記操作範囲10の外端寄りに指Q(位置QO)を置いたときの出力電流値は低いレベルであり、前記発光素子2a寄りに指Q(位置QI)を置いたときの出力電流値は高いレベルであることは言うまでもない。また、前記演算部3の演算処理部3dには、レベル検出を行うプログラムと、タイマー・プログラムとが組み込まれている。
【0030】
そして、外端寄り(位置QO)に指を入れると、先ず、レベル検出が行われ低い方のレベルであることが確認され、タイマーが起動される。そして所定時間(例えば2〜3秒間)、低い方のレベルの出力電流値(閾値1)が継続されていることが確認されると、信号出力部3fはカーエアコンのメインスイッチを投入する。
【0031】
また、前記発光素子2a寄りの所定位置に指Q(位置QI)を入れると、より強い反射光が受光素子2b、2cに受光されるものとなり、上記のようにレベル検出が行われ、例えばカーエアコンなどの操作を行うために設定されたレベルより高い出力電流(閾値2)であることが確認され、そして、上記と同様にタイマーにより持続時間が計測される。そして、高レベルの出力が所定時間(例えば2〜3秒間)継続されたことが確認されるとカーエアコンのメインスイッチは開放される。なお、位置QIにおいては、受光素子2b、2cの出力が位置QIに達する以前に飽和する可能性もあるので、その飽和信号をもって開放信号としても良い。
【0032】
更に、本発明の二次元位置検出装置1においては、上記のように、指Qなどが前記操作範囲10内に使用開始後の最初に挿入された位置により、前記操作範囲10が検出する範囲を設定することも可能であり、例えば、自動車のイグニッションキーが投入された時点で本発明の二次元位置検出装置1の発光素子2aの点灯も行われるが、点灯電流は未だ一定値に設定されていない。
【0033】
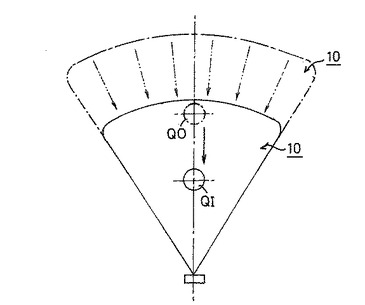
この状態で、前記操作範囲10に最初に指が挿入されると、挿入された位置に応じて受光素子2b、2cから出力される電流は異なるものとなる。この第四の実施例においては、例えば、発光素子2aに近い位置に指が挿入される程、前記発光素子2aに印加される駆動電流は少なく設定され、よって、図11中に実線で示すように操作範囲10は狭く設定される。
【0034】
また、発光素子2aから遠い位置に最初に指が挿入されると、前記発光素子2aに印加される駆動電流は大きく設定され、受光素子2b、2cに設定されている検出レベルが同一であれば、操作範囲10は図11中に破線で示すように広く設定される。よって、調整内容が粗くても良い場合には、操作範囲10は狭く設定し、微細な調整が望まれるときには調整範囲10を広く設定すれば調整などが容易となり利便性が向上する。
【0035】
以上に説明したように、本発明によれば、1つの発光素子2aと、2つの受光素子2b、2cとで二次元の動作が検出できるものとなり、この検出に従ってカーエアコンなど機器の操作も可能なものとなる。更には、適宜な閾値値の設定などにより操作を行う機器の電源のON/OFFも可能とし、より簡便な構成で多機能なコントロールの実行を可能とするものである。
【図面の簡単な説明】
【0036】
【図1】本発明に係る二次元位置検出装置の検出部を示す説明図である。
【図2】発光素子の発光用光学部品を含む配光分布の例を示す説明図である。
【図3】一方の受光素子の受光用光学部品を含む感度の例を示す説明図である。
【図4】他方の受光素子の受光用光学部品を含む感度の例を示す説明図である。
【図5】発光用光学部品から放射される光の配布状態を側面から見た状態で示す説明図である。
【図6】本発明に係る二次元位置検出装置の演算部、出力部を示すブロック図である。
【図7】指の水平方向への移動時の、演算部で行われる移動量の演算手順を模式的に表すグラフである。
【図8】操作範囲内での各方向への指の移動と、それに応じる出力状況を示すグラフである。
【図9】本発明に係る二次元位置検出装置の第二の実施例を要部で示す説明図である。
【図10】本発明に係る二次元位置検出装置の第三の実施例を要部で示す説明図である。
【図11】本発明に係る二次元位置検出装置の第四の実施例を要部で示す説明図である。
【図12】従来例の光学検出部を示す斜視図である。
【図13】従来例の演算部を示すブロック図である。
【図14】従来例の動作例を示す説明図である。
【符号の説明】
【0037】
1…二次元位置検出装置
2…検出部
2a…発光素子
2b、2c…受光素子
2d…発光用光学部品
2e、2f…受光用光学部品
2g…スリット
3…演算部
3a…発光強度調整部
3b…感度調整部
3c…感度調整部
3d…演算処理部
3e…外部記憶部
3f…信号出力部
4…駆動機器
10…操作範囲
10a…指標
【技術分野】
【0001】
本発明は、例えば、所定の範囲に投射されている光線中で所定の方向に指などを動かすことで、直接に操作ダイヤルなどに手を触れることなく所望の動作を行わせようとするものであり、操作ダイヤルなどを設けることなく、車室内の操作機器の配置の整理が可能となり、車室内面積の有効利用を可能とするものである。
【背景技術】
【0002】
従来の、この種の光と、手の動きにより(以下、手振り式と称する)車載装置を制御するものとした入力装置90の構成の例を示すものが図12〜図14であり、先ず、この手振り式入力装置90の中心には1つの受光素子91aが設置され、垂直方向には前記受光素子91aを挟んで一対の発光素子92a、92bが設置され、水平方向には同様に前記受光素子91aを挟んで一対の発光素子92c、92dが設置された検出部91が車室内などの適宜な位置に設けられている。
【0003】
そして、この検出部91からの出力は図13に示すような制御回路80に入力される。このときに、例えば、前記検出部91の水平方向、向かって右から左に手を振れば、受光素子91aには、発光素子92c、発光素子92dの順に光が入射するものとなり、例えば、発光素子92cと発光素子92dとの点灯周波数を変えておけば、制御回路80は発光素子92c→発光素子92dの順に光が入射したことが容易に判定できるものとなる。
【0004】
そして、図14に示すように制御回路80は手振り方向が右から左であった場合には、カーナビゲーションシステムなどの画面を左から右にスクロールさせる。このようにすることで自動車の進行方向に向かい手を振れば、今後の進行方向が表示されるものとなり、前方から視線を逸らすことなく手の動きだけで画面の移動ができるものとなる。
【特許文献1】特開平11−044703号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来の手振り式の車載装置においては、4個の発光素子92a〜92dと1個の受光素子とで合計5個の素子を使用しているにも拘わらず、一度の操作では一方向への画面のスクロールしか制御できず、装置の規模の割には可能な動作が少ないという問題点を生じている。
【0006】
また、このように4個もの発光素子92a〜92dを近接して設置した場合には、前方で振られる手が、僅かでも傾くと、例えば、発光素子92aからの光に続いて、発光素子92dからの光が入射するなどの状態を生じやすく、これによる誤動作を防止するために制御回路80の構成が煩雑化するなどの問題も生じるものとなる。
【課題を解決するための手段】
【0007】
本発明は、上記した従来の課題を解決するための具体的手段としてて略扇状の照射範囲を有し、この照射範囲をもって操作範囲とし、光学部品を有する少なくとも1つの発光素子と、前記発光素子からの照射範囲と受光範囲を重ね、光学部品を有する少なくとも2つの受光素子とからなり、前記照射範囲内に挿入された所定の物体からの反射光により前記物体の移動、若しくは、位置検出を行う二次元位置検出装置であって、前記受光素子の少なくとも一方には、前記発光素子を中心とする略扇状とした前記照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性をもたせ、他方の受光素子の受光感度特性との演算により、前記照射範囲内での前記発光素子からの遠近方向への移動量、および、これと直交する方向への移動量の二次元方向の移動、若しくは、位置検出を可能とすることを特徴とする二次元位置検出装置、を提供することで課題を解決するものである。
【発明の効果】
【0008】
本発明により、光学部品を有する1つの発光素子で略扇状とした照射範囲を形成し、光学部品を有する2つの受光素子で前記照射範囲に挿入された指などからの反射光の位置を演算することで、前記指の前記照射範囲内における左右方向と前後方向との存在位置が知れるものとなり、よって、左右方向と前後方向とに割り付けることで2種類の要素を制御することが可能となり、機能向上とコストダウンとが可能となる。
【発明を実施するための最良の形態】
【0009】
つぎに、本発明を図に示す実施形態に基づいて詳細に説明する。図1(A)に示すものは、本発明に係る二次元位置検出装置1の検出部2であり、この検出部2は1つの発光素子2aと2つの受光素子2b、2cと、これら発光素子2a、受光素子2b、2cからの光に所定の形状、および、輝度特性を与える1つの発光用光学部品2dと、2つの受光用光学部品2e、2fとから構成されている。そして、それぞれの光学素子2a、2b、2c、光学部品2d,2e、2fにより図1(B)に示すように、略同一形状の略扇状の範囲に照射配光、および、受光感度を有するようにされている。
【0010】
前記発光用光学部品2dは、前記発光素子2aが発光する光を制御することを目的とするものであり、ここでは、前記発光用光学部品2dは、前記発光素子2aを中心とする略扇状の形状の操作範囲10に光を配布すると共に、前記扇状の形状に配布された光は、図2に示すように前記発光素子2aを中心とする略同心円状の照射配光特性を有するものとされている。
【0011】
また、前記受光用光学部品2eは、図1(A)に示す状態で前記発光素子2aの向かって左側に設置された受光素子2bに取付けられるものであり、前記発光用光学部品2dが発光素子2aからの光を配布する略扇状の範囲の中に、例えば指など光を反射する物体が挿入されたときに生じる反射光を受光するものとされている。
【0012】
同様に、前記発光素子2aの向かって右側に設置された受光素子2cにも受光用光学部品2fが取付けられていて発光素子2aからの光を配布する略扇状の範囲の中に、光を反射する物体が挿入されたときには、その反射光を受光素子2cに与え出力を生じさせるものとされている。
【0013】
ここで、前記受光用光学部品2eと、受光用光学部品2fとは、上記した発光素子2aからの光が配布される略扇状の範囲内での受光感度に入射角に対応する感度差を設けるものであり、例えば、発光素子2aの左側に設置されている受光素子2bは、図3にも示すように操作範囲10内では左上側方向から入射する光ほど高出力が得られ、右側に設置される受光素子2cは、図4に示すように操作範囲10内では右上側方向から入射する光ほど高出力が得られるようになど、位置(入射角)と出力との間に特定の相関性を有するようにされている。
【0014】
尚、上記のように光が受光素子2b、2cに入射する方向と、その方向に対応する出力とに相関を有するものとすれば、大部分の場合において、受光素子2bと受光素子2cとの出力差が大きくとれるものとなり、微細な調整が可能となるが、それ程に正確な調整が必要とされない場合には、何れか一方の受光素子(2b、2c)は、図2に示したように素子を中心として同心円状の感度を有するものとしても良い。
【0015】
また、前記発光用光学部品2d、および、受光用光学部品2e、2fは、前記操作範囲10が形成されているのと直交する方向には、コリメート化、または、スリット2gを用いるなど適宜の手段を用いることで、図5に示すように、光が薄い板状として放射されるものとされ、指の先など常時に身近にあり使用可能なものでの操作が可能な状態とされている。
【0016】
尚、発光素子2a、受光素子2b、2cを設置する位置は上記説明に限定されるものではなく、要は、指などで反射する前記発光素子2aからの光で、前記受光素子2b、2cに所定の出力電流が得られればよいものであり、上記した配置の順序を限定するものではない。以上が、本発明の二次元位置検出装置の検出部2の構成であり、本発明では、前記検出部2に、図6に示すような演算部3、および、出力部4を取付けて所望の動作を行わせるものとしている。
【0017】
図7は、前記操作範囲10内で発光素子2aに対して指を動かしたときの、指の動いた距離の演算手順の一例を示すものであり、先ず、操作範囲10内の発光素子2aから距離LTの位置に基準点Tを設定しておく。このときの、前記点Tに指を挿入したときの受光素子2bの受光量をPbt、受光素子2cの受光量をPctとし、距離LTと受光量和(Pbt+Pct)、角度θTと受光量比(Pbt/Pct)の相関が判るように予めにメモリーに記憶しておく。
◎距離と受光量和の相関値γ(L)=距離(LT)/受光量和(Pbt+Pct)
◎角度と受光量比の相関値γ(θ)=角度(θT)/受光量比(Pbt/Pct)
【0018】
前記操作範囲10内の任意の点Sにおける受光素子2bの受光量をPbs、受光素子2cの受光量をPcsとしたとき、距離LS、角度θSは、下式により算出することができる。
◎LS=γ(L)×(Pbs+Pcs)
◎θS=γ(θ)×(Pbs/Pcs)
【0019】
使用に当たっては、基準点Tを狙い指を挿入し(この場合、多くは実際には点Tからはずれて、その近傍である点bなどに指を挿入するものとなる)、このときの角度をθb、受光素子2b、2cの受光量のそれぞれ、Pbb、Pcbを測定する。
【0020】
非検出物(指)の反射率・形状が、予めメモリーに記憶していたデーターの元となる指の反射率・形状と異なることが予想されるので、受光量和(Pbb+Pcb)が受光量和(Pbt+Pct)となるようにキャリブレーションを行い、距離LTとする。(基準点がずれた分、検出エリアと分解能に多少の誤差を生じるが、本発明の装置自体が指で操作するレベルであるので、誤差的には実質的な支障を生じることはない。キャリブレーションは、図6の演算処理部3dからの信号により、発光強度調整部3a、若しくは、感度調整部3b、3cによって行われる。
【0021】
つぎに点cに指を動かした後の角度θc、受光素子2b、2cの受光量、それぞれPbc、Pccを測定する。X成分(角度)、Y成分(距離)それぞれの変化量Δθ、ΔLを計算し、検出量とする。
X成分:Δθ=(θc−θb)=γ(θ)×{(Pbc/Pcc)−(Pbb/Pcb)}
Y成分:ΔL=(Lc−Lb)=γ(L)×{(Pbc+Pcc)−(Pbb+Pcb)}
【0022】
図8において、図8aは、前記操作範囲10内で角度τ上を指が移動したときの3点τ1、τ2、τ3を示す。図8bは、τ1→τ2→τ3を指が移動したときの受光素子の受光量和(Pb+Pc)を示し、光学素子から離れるにつれて暫減する特性を示す。図8cは、τ1→τ2→τ3を指が移動したときの受光素子2b、2cの受光量比(Pb/Pc)を示し、光学素子からの距離に係わらず、一定の値となる特性を示す。よって、角度は距離に係わらず検出することができる。
【0023】
図8dは、前記操作範囲10内で指が左から右へ水平移動したときの3点L、C、Rを示す。図8eは、L→C→Rを指が移動したときの受光素子2b、2cの受光量和(Pb+Pc)を示し、水平方向の位置に係わらず、一定の値となる特性を示す。図8fは、L→C→Rを指が移動したときの受光素子2b、2cの受光量比(Pb/Pc)を示し、右方向に移動するにつれ、暫減する特性を示す。よって、垂直距離は角度に係わらず検出することができる。よって、前記操作範囲10内における指の位置は、上記の角度検出、垂直距離検出により判定でき、指の移動量も、2点間の検出値の差をもって確認することができる。
【0024】
図8gは、前記操作範囲10内で指が点S1から点S2に、斜めに移動したときの状態を示す。点S1での角度、垂直距離検出がθs1、Ls1,点S2での角度、垂直距離検出がθs2、Ls2であったとき、角度変化量Δθ、垂直距離変化量ΔLは下式で表すことができる。
Δθ=θs2−θs1
ΔL=Ls2−Ls1
【0025】
図9は本発明の第二の実施例であり、本発明の二次元位置検出装置1は操作範囲10中で指を水平方向、垂直方向に移動させることで、例えばカーエアコンの設定温度と風量との双方をそれぞれ独立に調整可能とするものである。
【0026】
しかしながら、上記にも説明したように、本発明の二次元位置検出装置1は発光素子2aからの光が指で反射し、受光素子2b、2cに達したときの光の強さで、受光素子2b、2cからの出力電流が決定され、その出力電流に基づいて指などの移動量を演算するものであるので、例えば、指の太さの違い、反射率の違いなどにより演算結果に相違を生じる可能性がある。
【0027】
よって、本発明の二次元位置検出装置1においては、例えば、略扇状とされたは操作範囲10中の発光素子2aの正面で且つ中央近傍を指示する指標10aなどを設けておき、使用を開始する前に、前記指標10aに合わせて指Qを挿入すれば、受光素子2b、2cに規定の出力が得られるように前記演算部3の発光強度調整部3aによって発光素子2aに印加する電流を調整してキャリブレーションを行う、若しくは、受光素子2b、2cから出力される電流を調整してキャリブレーションを行う。
【0028】
図10は本発明の第三の実施例であり、例えば、操作範囲10の中心線近傍、即ち、発光素子2aの正面の外端、若しくは、外端寄りに指Q(位置QOと称す)を置いたときと、前記発光素子2a寄りに指Q(位置QIと称す)を置いたときの2つの出力電流値が、例えば、外部記憶部3eに記憶されている。尚、前記2つの出力電流値は受光素子2bのものでも受光素子2cのものであっても良く、また、両受光素子2b、2cの合算値であっても良い。
【0029】
このときに、前記操作範囲10の外端寄りに指Q(位置QO)を置いたときの出力電流値は低いレベルであり、前記発光素子2a寄りに指Q(位置QI)を置いたときの出力電流値は高いレベルであることは言うまでもない。また、前記演算部3の演算処理部3dには、レベル検出を行うプログラムと、タイマー・プログラムとが組み込まれている。
【0030】
そして、外端寄り(位置QO)に指を入れると、先ず、レベル検出が行われ低い方のレベルであることが確認され、タイマーが起動される。そして所定時間(例えば2〜3秒間)、低い方のレベルの出力電流値(閾値1)が継続されていることが確認されると、信号出力部3fはカーエアコンのメインスイッチを投入する。
【0031】
また、前記発光素子2a寄りの所定位置に指Q(位置QI)を入れると、より強い反射光が受光素子2b、2cに受光されるものとなり、上記のようにレベル検出が行われ、例えばカーエアコンなどの操作を行うために設定されたレベルより高い出力電流(閾値2)であることが確認され、そして、上記と同様にタイマーにより持続時間が計測される。そして、高レベルの出力が所定時間(例えば2〜3秒間)継続されたことが確認されるとカーエアコンのメインスイッチは開放される。なお、位置QIにおいては、受光素子2b、2cの出力が位置QIに達する以前に飽和する可能性もあるので、その飽和信号をもって開放信号としても良い。
【0032】
更に、本発明の二次元位置検出装置1においては、上記のように、指Qなどが前記操作範囲10内に使用開始後の最初に挿入された位置により、前記操作範囲10が検出する範囲を設定することも可能であり、例えば、自動車のイグニッションキーが投入された時点で本発明の二次元位置検出装置1の発光素子2aの点灯も行われるが、点灯電流は未だ一定値に設定されていない。
【0033】
この状態で、前記操作範囲10に最初に指が挿入されると、挿入された位置に応じて受光素子2b、2cから出力される電流は異なるものとなる。この第四の実施例においては、例えば、発光素子2aに近い位置に指が挿入される程、前記発光素子2aに印加される駆動電流は少なく設定され、よって、図11中に実線で示すように操作範囲10は狭く設定される。
【0034】
また、発光素子2aから遠い位置に最初に指が挿入されると、前記発光素子2aに印加される駆動電流は大きく設定され、受光素子2b、2cに設定されている検出レベルが同一であれば、操作範囲10は図11中に破線で示すように広く設定される。よって、調整内容が粗くても良い場合には、操作範囲10は狭く設定し、微細な調整が望まれるときには調整範囲10を広く設定すれば調整などが容易となり利便性が向上する。
【0035】
以上に説明したように、本発明によれば、1つの発光素子2aと、2つの受光素子2b、2cとで二次元の動作が検出できるものとなり、この検出に従ってカーエアコンなど機器の操作も可能なものとなる。更には、適宜な閾値値の設定などにより操作を行う機器の電源のON/OFFも可能とし、より簡便な構成で多機能なコントロールの実行を可能とするものである。
【図面の簡単な説明】
【0036】
【図1】本発明に係る二次元位置検出装置の検出部を示す説明図である。
【図2】発光素子の発光用光学部品を含む配光分布の例を示す説明図である。
【図3】一方の受光素子の受光用光学部品を含む感度の例を示す説明図である。
【図4】他方の受光素子の受光用光学部品を含む感度の例を示す説明図である。
【図5】発光用光学部品から放射される光の配布状態を側面から見た状態で示す説明図である。
【図6】本発明に係る二次元位置検出装置の演算部、出力部を示すブロック図である。
【図7】指の水平方向への移動時の、演算部で行われる移動量の演算手順を模式的に表すグラフである。
【図8】操作範囲内での各方向への指の移動と、それに応じる出力状況を示すグラフである。
【図9】本発明に係る二次元位置検出装置の第二の実施例を要部で示す説明図である。
【図10】本発明に係る二次元位置検出装置の第三の実施例を要部で示す説明図である。
【図11】本発明に係る二次元位置検出装置の第四の実施例を要部で示す説明図である。
【図12】従来例の光学検出部を示す斜視図である。
【図13】従来例の演算部を示すブロック図である。
【図14】従来例の動作例を示す説明図である。
【符号の説明】
【0037】
1…二次元位置検出装置
2…検出部
2a…発光素子
2b、2c…受光素子
2d…発光用光学部品
2e、2f…受光用光学部品
2g…スリット
3…演算部
3a…発光強度調整部
3b…感度調整部
3c…感度調整部
3d…演算処理部
3e…外部記憶部
3f…信号出力部
4…駆動機器
10…操作範囲
10a…指標
【特許請求の範囲】
【請求項1】
略扇状の照射範囲を有し、この照射範囲をもって操作範囲とし、光学部品を有する少なくとも1つの発光素子と、前記発光素子からの照射範囲と受光範囲を重ね、光学部品を有する少なくとも2つの受光素子とからなり、前記照射範囲内に挿入された所定の物体からの反射光により前記物体の移動、若しくは、位置検出を行う二次元位置検出装置であって、前記受光素子の少なくとも一方には、前記発光素子を中心とする略扇状とした前記照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性をもたせ、他方の受光素子の受光感度特性との演算により、前記照射範囲内での前記発光素子からの遠近方向への移動量、および、これと直交する方向への移動量の二次元方向の移動、若しくは、位置検出を可能とすることを特徴とする二次元位置検出装置。
【請求項2】
前記操作範囲内の適宜の位置には基準点が設定され、この基準点に前記所定の物体を挿入することで反射率を測定し、前記発光素子の明るさ、若しくは、受光素子の感度の少なくとも一方を調整して前記受光素子に達する反射光の光量を一定化するキャリブレーション機能を有することを特徴とする請求項1記載の二次元位置検出装置。
【請求項3】
前記操作範囲内に最初に挿入される前記所定の物体の位置により前記発光素子に印加される駆動電流は可変とされ、前記所定の物体が最初に挿入されたときの距離が前記発光素子から離れるに従い前記駆動電流は大きく設定される構成とされて前記操作範囲が大きく設定され、前記発光素子から近づくに従い前記発光素子に印加される駆動電流は小さく設定されて前記操作範囲が狭く設定されることを特徴とする請求項1または請求項2記載の二次元位置検出装置。
【請求項4】
前記発光素子により形成される前記操作範囲は任意波長の光線であり、且つ、操作方向と直角方向には薄面として形成されていることを特徴とする請求項1〜請求項3記載の二次元位置検出装置。
【請求項1】
略扇状の照射範囲を有し、この照射範囲をもって操作範囲とし、光学部品を有する少なくとも1つの発光素子と、前記発光素子からの照射範囲と受光範囲を重ね、光学部品を有する少なくとも2つの受光素子とからなり、前記照射範囲内に挿入された所定の物体からの反射光により前記物体の移動、若しくは、位置検出を行う二次元位置検出装置であって、前記受光素子の少なくとも一方には、前記発光素子を中心とする略扇状とした前記照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性をもたせ、他方の受光素子の受光感度特性との演算により、前記照射範囲内での前記発光素子からの遠近方向への移動量、および、これと直交する方向への移動量の二次元方向の移動、若しくは、位置検出を可能とすることを特徴とする二次元位置検出装置。
【請求項2】
前記操作範囲内の適宜の位置には基準点が設定され、この基準点に前記所定の物体を挿入することで反射率を測定し、前記発光素子の明るさ、若しくは、受光素子の感度の少なくとも一方を調整して前記受光素子に達する反射光の光量を一定化するキャリブレーション機能を有することを特徴とする請求項1記載の二次元位置検出装置。
【請求項3】
前記操作範囲内に最初に挿入される前記所定の物体の位置により前記発光素子に印加される駆動電流は可変とされ、前記所定の物体が最初に挿入されたときの距離が前記発光素子から離れるに従い前記駆動電流は大きく設定される構成とされて前記操作範囲が大きく設定され、前記発光素子から近づくに従い前記発光素子に印加される駆動電流は小さく設定されて前記操作範囲が狭く設定されることを特徴とする請求項1または請求項2記載の二次元位置検出装置。
【請求項4】
前記発光素子により形成される前記操作範囲は任意波長の光線であり、且つ、操作方向と直角方向には薄面として形成されていることを特徴とする請求項1〜請求項3記載の二次元位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−85799(P2009−85799A)
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願番号】特願2007−256878(P2007−256878)
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
【Fターム(参考)】
【公開日】平成21年4月23日(2009.4.23)
【国際特許分類】
【出願日】平成19年9月28日(2007.9.28)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
【Fターム(参考)】
[ Back to top ]