
二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法
【課題】構成を簡略化することができる二次監視レーダ装置を提供する。
【解決手段】二次監視レーダ装置1は、受信した信号から生成されるΣ信号SΣを振幅情報Σa及び位相情報Σpを含むLog増幅信号SΣLogに増幅するLog増幅器41と、Log増幅信号SΣLogをデジタル信号SΣdにデジタル変換するA/D変換器42とを有するΣ信号処理部32と、受信した信号から生成されるΔ信号SΔを振幅情報Δa及び位相情報Δpを含むLog増幅信号SΔLogに増幅するLog増幅器51と、Log増幅信号SΔLogをデジタル信号SΔdにデジタル変換するA/D変換器52とを有するΔ信号処理部33と、振幅情報Σa、位相情報Σp、振幅情報Δa及び位相情報Δpから航空機91の方位角度θを演算するモノパルス演算部37とを備えている。
【解決手段】二次監視レーダ装置1は、受信した信号から生成されるΣ信号SΣを振幅情報Σa及び位相情報Σpを含むLog増幅信号SΣLogに増幅するLog増幅器41と、Log増幅信号SΣLogをデジタル信号SΣdにデジタル変換するA/D変換器42とを有するΣ信号処理部32と、受信した信号から生成されるΔ信号SΔを振幅情報Δa及び位相情報Δpを含むLog増幅信号SΔLogに増幅するLog増幅器51と、Log増幅信号SΔLogをデジタル信号SΔdにデジタル変換するA/D変換器52とを有するΔ信号処理部33と、振幅情報Σa、位相情報Σp、振幅情報Δa及び位相情報Δpから航空機91の方位角度θを演算するモノパルス演算部37とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動体の方位を測定する二次監視レーダ(SSR:Secondary Surveillance Radar)装置及び二次監視レーダ装置によるモノパルス測角方法に関する。
【背景技術】
【0002】
モードSトランスポンダまたはATCRBSトランスポンダを搭載した航空機の方位角度を測角して監視する二次監視レーダ装置が知られている。
【0003】
二次監視レーダ装置は、航空機に搭載されているトランスポンダにオールコール質問またはロールコール質問を送信する。また、二次監視レーダ装置は、その質問に対する様々な情報を含む応答を受信する。そして、二次監視レーダ装置は、受信した応答から航空管制の監視のために必要な情報を取得する。
【0004】
一般に、二次監視レーダ装置は、航空機が存在する方位角度を測角する。この方位角度を測角するための技術として、モノパルス測角方法が知られている(例えば、非特許文献1参照)。モノパルス測角方法には、振幅モノパルス測角方法や位相モノパルス測角方法等が知られている。
【0005】
従来の二次監視レーダ装置に用いられたモノパルス測角方法では、受信信号から生成されるΣ信号(和信号)及びΔ信号(差信号)のそれぞれの振幅情報及び位相情報とを別々に処理していた。具体的には、Σ信号から検波器によってΣ信号の振幅情報を検出するとともに、Δ信号から検波器によってΔ信号の振幅情報を検出する。また、リミッタを介して、Σ信号を位相検波器に入力してΣ信号の位相情報を検出するとともに、リミッタを介して、Δ信号を位相検波器に入力してΔ信号の位相情報を検出する。この後、方位角度演算部によって、アナログ信号のまま、Σ信号の振幅情報、位相情報、及びΔ信号の振幅情報、位相情報を用いてモノパルス信号を生成し、その信号を基にA/D変換器等を用いてモノパルス値を算出し、モノパルス値より航空機の方位角度が算出される。
【0006】
更に、Σ信号及びΔ信号をアナログ信号で処理するので、ケーブル等による遅延及び減衰を抑制するために、Σ信号及びΔ信号の位相調整が、受信器に設けられたRF部によって行われている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】吉田孝監修 「改訂 レーダ技術」社団法人電子情報通信学会、平成8年10月1日発行、p260-p264
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来の二次監視レーダ装置によるモノパルス測角方法では、Σ信号の振幅情報及び位相情報と、Δ信号の振幅情報及び位相情報とを別々に処理するため、構成が複雑になるといった課題がある。更に、従来の二次監視レーダ装置は、Σ信号及びΔ信号をアナログ信号によって処理するために、より構成が複雑になるといった課題がある。
【0009】
本発明は、上述した課題を解決するために創案されたものであり、構成を簡略化することができる二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明に係る二次監視レーダ装置は、移動体のトランスポンダから送信される信号を受信して、モノパルス測角方式によって移動体の方位角度を測角する二次監視レーダ装置において、受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するΣ増幅手段と、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するΣA/D変換手段とを有するΣ信号処理部と、受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するΔ増幅手段と、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するΔA/D変換手段とを有するΔ信号処理部と、前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するモノパルス演算部とを備えていることを特徴とする。
【0011】
また、本発明に係る二次監視レーダ装置によるモノパルス測角方法は、移動体のトランスポンダから送信される信号を受信して、移動体の方位角度を演算する二次監視レーダ装置によるモノパルス測角方法において、受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するステップと、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するステップと、受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するステップと、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するステップと、前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するステップとを備えていることを特徴とする。
【発明の効果】
【0012】
本発明によれば、Σ信号及びΔ信号を振幅情報及び位相情報を含んだ状態で、増幅した増幅信号をデジタル変換して方位角度を演算するので、構成を簡略化することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態による二次監視レーダ装置と航空機との関係を示す概略図である。
【図2】二次監視レーダ装置のブロック図である。
【図3】第1実施形態によるモノパルス測角部のブロック図である。
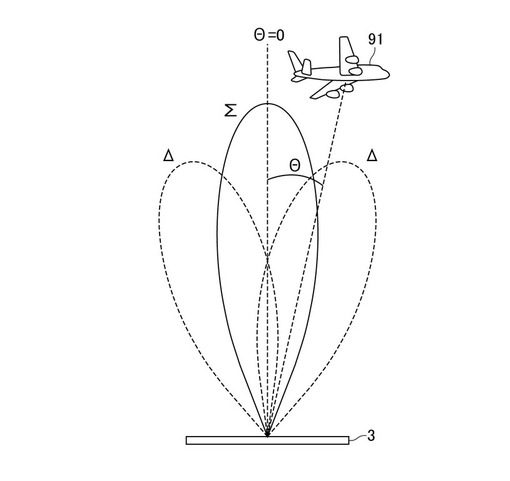
【図4】アンテナに対する航空機の位置と信号の関係を説明する図である。
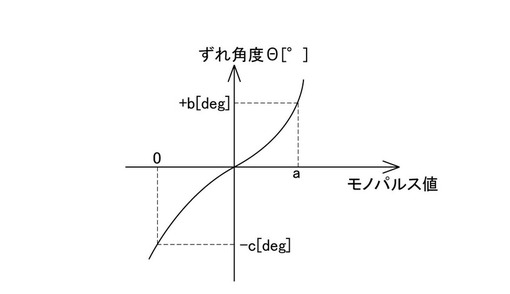
【図5】モノパルス値と航空機のずれ角度との関係を示すルックアップテーブルを説明する図である。
【発明を実施するための形態】
【0014】
(第1実施形態)
以下、図面を参照して、本発明の第1実施形態について説明する。図1は、第1実施形態による二次監視レーダ装置と航空機との関係を示す概略図である。図2は、二次監視レーダ装置のブロック図である。図3は、第1実施形態によるモノパルス測角部のブロック図である。図4は、アンテナに対する航空機の位置と信号の関係を説明する図である。図5は、モノパルス値と航空機のずれ角度との関係を示すルックアップテーブルを説明する図である。
【0015】
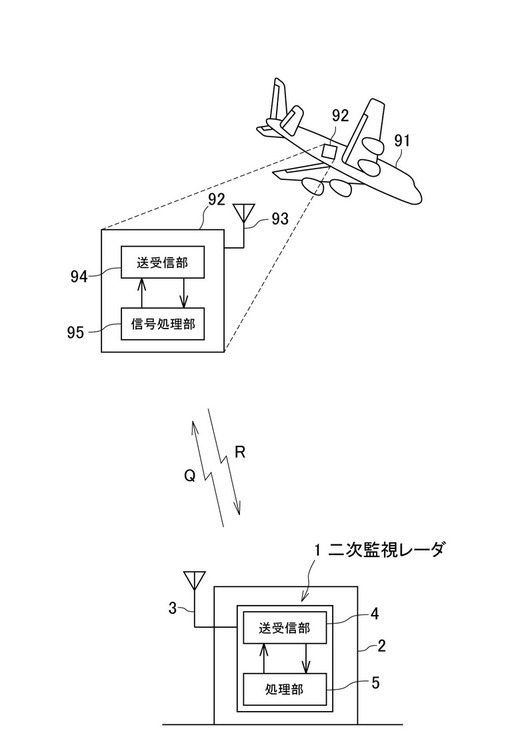
図1に示すように、第1実施形態による二次監視レーダ装置1は、トランスポンダ92が搭載された航空機91と質問Q及び応答Rを送受信して、種々の情報を得て監視するためのものである。二次監視レーダ装置1は、航空機91のトランスポンダ92から送信される応答Rを受信して、振幅モノパルス測角方式によって航空機91の方位角度を測角する。
【0016】
二次監視レーダ装置1は、地上局2に設置される。二次監視レーダ装置1は、アンテナ3と、送受信部4と、処理部5とを備えている。
【0017】
アンテナ3は、航空機91へ質問Qを送信する。また、アンテナ3は、応答Rを受信する。アンテナ3は、応答RからΣ信号(和信号)SΣ及びΔ信号(差信号)SΔを生成して、出力する。
【0018】
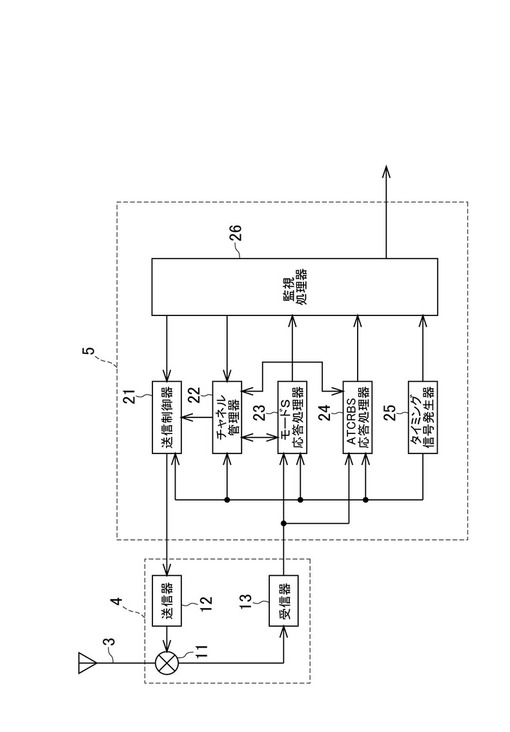
図2に示すように、送受信部4は、ミキサー11と、送信器12と、受信器13とを備えている。
【0019】
ミキサー11は、アンテナ3と、送信器12及び受信器13とを中継する。ミキサー11は、送信器12から送られる質問Qをアンテナ3へと送信する。また、ミキサー11は、アンテナ3から送られる応答Rを受信器13へと送信する。
【0020】
送信器12は、処理部5から入力された質問Qをミキサー11及びアンテナ3を介して、航空機91へと送信する。送信器12は、メインビームから送信されるINTパルスを出力する主送信器(図示略)と、オムニビームから送信されるサイドローブ抑圧(SLS)パルスを出力する副送信器(図示略)とを含む。
【0021】
受信器13は、質問Qに対する航空機91からの応答Rを、アンテナ3及びミキサー11を介して受信する。受信器13は、受信した応答RのΣ信号SΣ及びΔ信号SΔのRF信号からIF(Intermediate Frequency)受信信号を生成するとともに、処理してLogΣビデオ信号及びLogΔビデオ信号に変換した後、モードS応答処理器23及びATCRBS応答処理器24に供給する。
【0022】
また、受信器13は、モノパルス測角部31を備えている。モノパルス測角部31は、応答Rを送信してきた航空機91の方位角度θを振幅モノパルス測角方法によって測角するためのものである。
【0023】
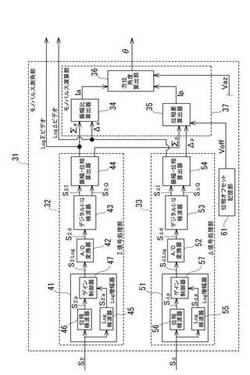
図3に示すように、モノパルス測角部31は、IF信号化されたΣ信号SΣを処理するΣ信号処理部32と、IF信号化されたΔ信号SΔを処理するΔ信号処理部33と、モノパルス演算部37とを備えている。
【0024】
Σ信号処理部32は、アンテナ3の複数個所で受信された応答Rを足したΣ信号SΣを処理するものである。Σ信号処理部32は、Log増幅器41と、A/D変換器42と、デジタルI/Q検波器43と、振幅・位相算出器44とを備えている。
【0025】
Log増幅器41は、入力されるΣ信号SΣを振幅情報及び位相情報を含むLog増幅信号SΣLogへと増幅するものである。Log増幅器41は、Log検波器45と、位相検波器46と、ゲイン制御器47とを備えている。
【0026】
Log検波器45は、受信器13から入力するΣ信号SΣから振幅情報を表すLog波形SΣaを検出し、ゲイン制御器47へと出力する。
【0027】
位相検波器46は、受信器13から入力するΣ信号SΣから周波数と位相情報を表す位相波形SΣpを検出し、ゲイン制御器47に出力する。
【0028】
ゲイン制御器47は、Log検波器45から入力するLog波形SΣaで特定される振幅に応じて、位相検波器46から入力する位相波形SΣpの振幅を増幅する。このとき、ゲイン制御器47は、A/D変換器42の最大入力レベルを最大値として、位相波形SΣpの振幅をリアルタイムで制御して、Log波形SΣa及び位相波形SΣpをLog増幅信号SΣLogへと変換する。また、ゲイン制御器47は、Log増幅信号SΣLogをA/D変換器42に出力する。
【0029】
A/D変換器42は、ゲイン制御器47から入力する周波数情報、位相情報及び振幅情報を含むLog増幅信号SΣLogをデジタル信号SΣdにデジタル変換してデジタルI/Q検波器43へと出力する。
【0030】
デジタルI/Q検波器43は、直交検波するためのものである。デジタルI/Q検波器43は、A/D変換器42から入力するデジタル信号SΣdをI(同相)信号SΣIとQ(直交)信号SΣQとに直交検波する。デジタルI/Q検波器43は、分離したI信号SΣI及びQ信号SΣQを振幅・位相算出器44へと出力する。
【0031】
振幅・位相算出器44は、デジタルI/Q検波器43から入力するI信号SΣI及びQ信号SΣQを用いて、信号の強度を示す振幅情報Σaと、信号の位相を示す位相情報Σpとを算出する。振幅・位相算出器44は、振幅情報Σaを振幅比算出器34へと出力する。振幅・位相算出器44は、LogΣビデオ信号を2値化するための応答処理器23、24へと出力する。また、振幅・位相算出器44は、位相情報Σpを位相差算出器35へと出力する。
【0032】
Δ信号処理部33は、アンテナ3の複数個所で受信された応答Rを引き算したΔ信号SΔを処理するものである。Δ信号処理部33は、Log増幅器51と、A/D変換器52と、デジタルI/Q検波器53と、振幅・位相算出器54とを備えている。
【0033】
Log増幅器51は、入力されるΔ信号SΔを振幅情報及び位相情報を含むLog増幅信号SΔLogへと増幅するものである。Log増幅器51は、Log検波器55と、位相検波器56と、ゲイン制御器57とを備えている。
【0034】
Log検波器55は、受信器13から入力するΔ信号SΔから振幅情報を表すLog波形SΔaを検出し、ゲイン制御器57へと出力する。
【0035】
位相検波器56は、受信器13から入力するΔ信号SΔから周波数と位相情報を表す位相波形SΔpを検出し、ゲイン制御器57に出力する。
【0036】
ゲイン制御器57は、Log検波器55から入力するLog波形SΔaで特定される振幅に応じて、位相検波器56から入力する位相波形SΔpの振幅を増幅する。このとき、ゲイン制御器57は、A/D変換器52の最大入力レベルを最大値として、位相波形SΔpの振幅をリアルタイムで制御して、Log波形SΔa及び位相波形SΔpをLog増幅信号SΔLogへと変換する。また、ゲイン制御器57は、Log増幅信号SΔLogをA/D変換器52に出力する。
【0037】
A/D変換器52は、ゲイン制御器57から入力する周波数情報、位相情報及び振幅情報を含むLog増幅信号SΔLogをデジタル信号SΔdにデジタル変換してデジタルI/Q検波器53へと出力する。
【0038】
デジタルI/Q検波器53は、直交検波するためのものである。デジタルI/Q検波器53は、A/D変換器52から入力するデジタル信号SΔdをI(同相)信号SΔIとQ(直交)信号SΔQとに直交検波する。デジタルI/Q検波器53は、分離したI信号SΔI及びQ信号SΔQを振幅・位相算出器54へと出力する。
【0039】
振幅・位相算出器54は、デジタルI/Q検波器53から入力するI信号SΔI及びQ信号SΔQを用いて、信号の強度を示す振幅情報Δaと、信号の位相を示す位相情報Δpとを算出する。振幅・位相算出器54は、振幅情報Δaを振幅比算出器34へと出力する。振幅・位相算出器54は、LogΔビデオ信号を2値化するための応答処理器23、24へと出力する。また、振幅・位相算出器54は、位相情報Δpを位相差算出器35へと出力する。
【0040】
モノパルス演算部37は、振幅情報Σa、位相情報Σp、振幅情報Δa、位相情報Δpから航空機91の方位角度θを演算する。モノパルス演算部37は、振幅比算出器34と、位相差算出器35と、方位角度算出部36とを含む。
【0041】
振幅比算出器34は、振幅・位相算出器44、54から入力された振幅情報Σa、Δaを以下の式に代入して、図4に示すアンテナ3正面からの航空機91のずれ角度(オフボアサイト角度)Θに対応する振幅比情報Iaを算出する。
Ia=k×arctan(Δa/Σa) ・・・(1)
【0042】
位相差算出器35は、振幅・位相算出器44、54から入力された位相情報Σp、Δpを以下の式に代入して、航空機91がアンテナ3の正面に対して右、左のいずれに位置しているかを示す位相差情報Ipを算出する。
Ip=Σp−Δp ・・・(2)
尚、位相差算出器35には、位相オフセット記憶部61に記憶された位相オフセット値Voffが入力される。位相差算出器35では、位相情報Σp、Δpが位相オフセット値Voffによってオフセットされる。これにより、アンテナ3の略正面(即ち、ずれ角度Θが略「0」)の航空機91の位相差情報Ipを正確に算出することができる。
【0043】
方位角度算出部36は、振幅比情報Ia及び位相差情報Ipからモノパルス値MPを算出する。方位角度算出部36は、図5に示すルックアップテーブルから演算したモノパルス値MPに対応するずれ角度Θを算出する。方位角度算出部36は、前述したずれ角度Θとアンテナ3のアジマス値Vazから航空機91の方位角度θを演算する。方位角度算出部36は、演算した方位角度θを応答処理器23、24へと出力する。
【0044】
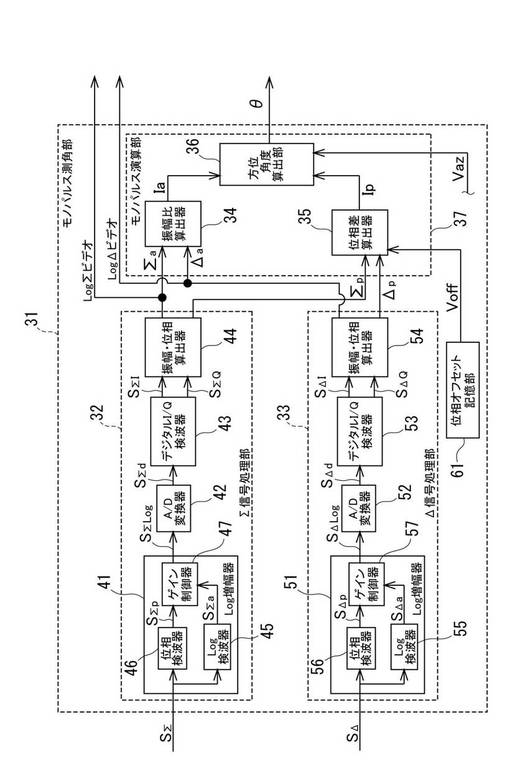
図2に示すように、処理部5は、送信制御器21と、チャネル管理器22と、モードS応答処理器23と、ATCRBS応答処理器24と、タイミング信号発生器25と、監視処理器26とを備えている。
【0045】
送信制御器21は、監視処理器26から供給される情報に基づき、質問Qを生成する。送信制御器21は、送信器12及びミキサー11を介して、生成した質問Qをアンテナ3から送信する。
【0046】
チャネル管理器22は、タイミング信号発生器25からの信号に基づき、質問や応答のスケジューリングを行う。
【0047】
モードS応答処理器23は、モードS用のトランスポンダ92を搭載した航空機91からのモードS用の応答Rを検出して、処理する。
【0048】
ATCRBS応答処理器24は、ATCRBS用のトランスポンダ92を搭載した航空機91からのモードA/C用の応答Rを検出して、処理する。
【0049】
タイミング信号発生器25は、処理部5全体のシステムを統括制御すべく、アンテナ3の方位方向におけるシステムの動作や質問信号形成等のためのタイミングを形成して供給する。
【0050】
監視処理器26では、航空機91との間の質問Q及び応答Rに必要な情報が記憶され、相関処理等の種々の処理を実行している。監視処理器26では、航空機91の方位角度θの情報によって、次の応答Rを受信する際の当該航空機91の位置を予測する。
【0051】
次に、二次監視レーダ装置1による航空機91の方位角度を測角するモノパルス測角処理について説明する。
【0052】
図1に示すように、二次監視レーダ装置1が、航空機91に質問Qを送信する。航空機91は、質問Qを受信すると、質問Qに対応した応答Rを送信する。二次監視レーダ装置1では、アンテナ3によって応答Rを受信する。この後、アンテナ3で受信された応答Rから生成されたΣ信号SΣ及びΔ信号SΔが、受信器13へと送信される。この後、受信器13のモノパルス測角部31では、モノパルス測角処理が行われる。
【0053】
まず、図3に示すように、モノパルス測角部31には、ミキサー11を介して、アンテナ3で受信された応答Rから生成されたΣ信号SΣ及びΔ信号SΔが入力される。
【0054】
Σ信号SΣは、Log増幅器41のLog検波器45及び位相検波器46へと入力される。Log検波器45は、Σ信号SΣから振幅情報を表すLog波形SΣaを検出し、ゲイン制御器47へと出力する。一方、位相検波器46は、Σ信号SΣから周波数と位相を表す位相波形SΣpを検出し、ゲイン制御器47へと出力する。ゲイン制御器47は、A/D変換器42の最大入力レベル以下に振幅がなるように、Log波形SΣaに基づいて位相波形SΣpの振幅を増幅して、Σ信号SΣの振幅情報及び位相情報を含むLog増幅信号SΣLogへと変換する。ゲイン制御器47は、Log増幅信号SΣLogをA/D変換器42へと出力する。
【0055】
A/D変換器42は、Log増幅信号SΣLogをデジタル信号SΣdへと変換した後、デジタルI/Q検波器43へと出力する。デジタルI/Q検波器43は、デジタル信号SΣdをI信号SΣIとQ信号SΣQとに分離して、それぞれを振幅・位相算出器44へと出力する。振幅・位相算出器44は、I信号SΣI及びQ信号SΣQから振幅情報Σa及び位相情報Σpを算出する。振幅・位相算出器44は、振幅情報Σaを振幅比算出器34へと出力するとともに、位相情報Σpを位相差算出器35へと出力する。
【0056】
一方、Δ信号処理部33でも、Σ信号処理部32と略同様の処理が行われる。以下、簡単に、Δ信号処理部33での処理について説明する。まず、Δ信号処理部33のLog増幅器51では、Δ信号SΔをΔ信号SΔの振幅情報及び位相情報を含むLog増幅信号SΔLogへと増幅する。次に、A/D変換器52では、Log増幅信号SΔLogをデジタル信号SΔdへとデジタル変換する。その後、デジタルI/Q検波器53では、デジタル信号SΔdをI信号SΔI及びQ信号SΔQへと直交検波する。次に、振幅・位相算出器54では、I信号SΔI及びQ信号SΔQから振幅情報Δa及び位相情報Δpを算出する。そして、振幅・位相算出器54は、振幅情報Δaを振幅比算出器34へと出力するとともに、位相情報Δpを位相差算出器35へと出力する。
【0057】
振幅比算出器34は、入力された振幅情報Σa、Δaと式(1)とに基づいて、ずれ角度Θに対応する振幅比情報Iaを算出して、方位角度算出部36へと出力する。位相差算出器35は、入力された位相情報Σp、Δpと式(2)とに基づいて、位相差情報Ipを算出して、方位角度算出部36へと出力する。
【0058】
方位角度算出部36では、振幅比情報Ia及び位相差情報Ipに基づいて、モノパルス値MPを算出する。その後、方位角度算出部36は、図5に示すルックアップテーブルにモノパルス値MPを適用して、ずれ角度Θを算出する。例えば、モノパルス値MP=aの時は、ずれ角度Θ=+b[deg]となり、モノパルス値MP=0の時は、ずれ角度Θ=−c[deg]となる。方位角度算出部36は、ずれ角度Θとアジマス値Vazから航空機91の方位角度θを算出して、応答処理器23、24へと出力する。
【0059】
上述したように第1実施形態による二次監視レーダ装置1では、Log増幅器41(51)によって、振幅情報を示すLog波形SΣa(SΔa)及び位相波形SΣp(SΔp)を含んだままでΣ信号SΣ(Δ信号SΔ)をLog増幅信号SΣLog(SΔLog)に増幅した後、A/D変換器42(52)によりデジタル変換している。この結果、振幅情報と位相情報とを別々に処理する従来のモノパルス測角方法に比べて、二次監視レーダ装置1の構成を簡略化することができる。
【0060】
また、従来のように振幅情報と位相情報とを別々にアナログ信号の状態で処理した場合、ケーブル等による遅延や減衰が生じていた。このため、受信器13が有するRF部(図示略)での位相調整に多大な時間を必要としていた。一方、第1実施形態による二次監視レーダ装置1では、Log波形SΣa(SΔa)と位相波形SΣp(SΔp)とを含むLog増幅信号SΣLog(SΔLog)をA/D変換器42(52)によって、デジタル信号SΣd(SΔd)に変換している。これにより、RF部での位相調整を必要としないので、容易に二次監視レーダ装置1を設定することができる。
【0061】
以上、実施形態を用いて本発明を詳細に説明したが、本発明は本明細書中に説明した実施形態に限定されるものではない。本発明の範囲は、特許請求の範囲の記載及び特許請求の範囲の記載と均等の範囲により決定されるものである。以下、上記実施形態を一部変更した変更形態について説明する。
【0062】
上述した実施形態の数値、構成等は適宜変更及び省略可能である。
【0063】
上述した実施形態では、振幅モノパルス方法を採用した二次監視レーダ装置に本発明を適用したが、位相モノパルスを採用した二次監視レーダ装置に本発明を適用してもよい。
【符号の説明】
【0064】
1 二次監視レーダ装置
2 地上局
3 アンテナ
4 送受信部
5 処理部
11 ミキサー
12 送信器
13 受信器
21 送信制御器
22 チャネル管理器
23 モードS応答処理器
24 ATCRBS応答処理器
25 タイミング信号発生器
26 監視処理器
31 モノパルス測角部
32 Σ信号処理部
33 Δ信号処理部
34 振幅比算出器
35 位相差算出器
36 方位角度演算部
41、51 Log増幅器
42、52 A/D変換器
43、53 デジタルI/Q検波器
44、54 振幅・位相算出器
45、55 Log検波器
46、56 位相検波器
47、57 ゲイン制御器
61 位相オフセット記憶部
91 航空機
92 トランスポンダ
Ia 振幅比情報
Ip 位相差情報
MP モノパルス値
Q 質問
R 応答
SΣ Σ信号
SΔ Δ信号
SΣa、SΔa Log波形
SΣp、SΔp 位相波形
SΣLog、SΔLog Log増幅信号
SΣd、SΔd デジタル信号
SΣI、SΔI I信号
SΣQ、SΔQ Q信号
Vaz アジマス値
Voff 位相オフセット値
Σa、Δa 振幅情報
Σp、Δp 位相情報
Θ ずれ角度
θ 方位角度
【技術分野】
【0001】
本発明は、移動体の方位を測定する二次監視レーダ(SSR:Secondary Surveillance Radar)装置及び二次監視レーダ装置によるモノパルス測角方法に関する。
【背景技術】
【0002】
モードSトランスポンダまたはATCRBSトランスポンダを搭載した航空機の方位角度を測角して監視する二次監視レーダ装置が知られている。
【0003】
二次監視レーダ装置は、航空機に搭載されているトランスポンダにオールコール質問またはロールコール質問を送信する。また、二次監視レーダ装置は、その質問に対する様々な情報を含む応答を受信する。そして、二次監視レーダ装置は、受信した応答から航空管制の監視のために必要な情報を取得する。
【0004】
一般に、二次監視レーダ装置は、航空機が存在する方位角度を測角する。この方位角度を測角するための技術として、モノパルス測角方法が知られている(例えば、非特許文献1参照)。モノパルス測角方法には、振幅モノパルス測角方法や位相モノパルス測角方法等が知られている。
【0005】
従来の二次監視レーダ装置に用いられたモノパルス測角方法では、受信信号から生成されるΣ信号(和信号)及びΔ信号(差信号)のそれぞれの振幅情報及び位相情報とを別々に処理していた。具体的には、Σ信号から検波器によってΣ信号の振幅情報を検出するとともに、Δ信号から検波器によってΔ信号の振幅情報を検出する。また、リミッタを介して、Σ信号を位相検波器に入力してΣ信号の位相情報を検出するとともに、リミッタを介して、Δ信号を位相検波器に入力してΔ信号の位相情報を検出する。この後、方位角度演算部によって、アナログ信号のまま、Σ信号の振幅情報、位相情報、及びΔ信号の振幅情報、位相情報を用いてモノパルス信号を生成し、その信号を基にA/D変換器等を用いてモノパルス値を算出し、モノパルス値より航空機の方位角度が算出される。
【0006】
更に、Σ信号及びΔ信号をアナログ信号で処理するので、ケーブル等による遅延及び減衰を抑制するために、Σ信号及びΔ信号の位相調整が、受信器に設けられたRF部によって行われている。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】吉田孝監修 「改訂 レーダ技術」社団法人電子情報通信学会、平成8年10月1日発行、p260-p264
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来の二次監視レーダ装置によるモノパルス測角方法では、Σ信号の振幅情報及び位相情報と、Δ信号の振幅情報及び位相情報とを別々に処理するため、構成が複雑になるといった課題がある。更に、従来の二次監視レーダ装置は、Σ信号及びΔ信号をアナログ信号によって処理するために、より構成が複雑になるといった課題がある。
【0009】
本発明は、上述した課題を解決するために創案されたものであり、構成を簡略化することができる二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明に係る二次監視レーダ装置は、移動体のトランスポンダから送信される信号を受信して、モノパルス測角方式によって移動体の方位角度を測角する二次監視レーダ装置において、受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するΣ増幅手段と、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するΣA/D変換手段とを有するΣ信号処理部と、受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するΔ増幅手段と、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するΔA/D変換手段とを有するΔ信号処理部と、前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するモノパルス演算部とを備えていることを特徴とする。
【0011】
また、本発明に係る二次監視レーダ装置によるモノパルス測角方法は、移動体のトランスポンダから送信される信号を受信して、移動体の方位角度を演算する二次監視レーダ装置によるモノパルス測角方法において、受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するステップと、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するステップと、受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するステップと、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するステップと、前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するステップとを備えていることを特徴とする。
【発明の効果】
【0012】
本発明によれば、Σ信号及びΔ信号を振幅情報及び位相情報を含んだ状態で、増幅した増幅信号をデジタル変換して方位角度を演算するので、構成を簡略化することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態による二次監視レーダ装置と航空機との関係を示す概略図である。
【図2】二次監視レーダ装置のブロック図である。
【図3】第1実施形態によるモノパルス測角部のブロック図である。
【図4】アンテナに対する航空機の位置と信号の関係を説明する図である。
【図5】モノパルス値と航空機のずれ角度との関係を示すルックアップテーブルを説明する図である。
【発明を実施するための形態】
【0014】
(第1実施形態)
以下、図面を参照して、本発明の第1実施形態について説明する。図1は、第1実施形態による二次監視レーダ装置と航空機との関係を示す概略図である。図2は、二次監視レーダ装置のブロック図である。図3は、第1実施形態によるモノパルス測角部のブロック図である。図4は、アンテナに対する航空機の位置と信号の関係を説明する図である。図5は、モノパルス値と航空機のずれ角度との関係を示すルックアップテーブルを説明する図である。
【0015】
図1に示すように、第1実施形態による二次監視レーダ装置1は、トランスポンダ92が搭載された航空機91と質問Q及び応答Rを送受信して、種々の情報を得て監視するためのものである。二次監視レーダ装置1は、航空機91のトランスポンダ92から送信される応答Rを受信して、振幅モノパルス測角方式によって航空機91の方位角度を測角する。
【0016】
二次監視レーダ装置1は、地上局2に設置される。二次監視レーダ装置1は、アンテナ3と、送受信部4と、処理部5とを備えている。
【0017】
アンテナ3は、航空機91へ質問Qを送信する。また、アンテナ3は、応答Rを受信する。アンテナ3は、応答RからΣ信号(和信号)SΣ及びΔ信号(差信号)SΔを生成して、出力する。
【0018】
図2に示すように、送受信部4は、ミキサー11と、送信器12と、受信器13とを備えている。
【0019】
ミキサー11は、アンテナ3と、送信器12及び受信器13とを中継する。ミキサー11は、送信器12から送られる質問Qをアンテナ3へと送信する。また、ミキサー11は、アンテナ3から送られる応答Rを受信器13へと送信する。
【0020】
送信器12は、処理部5から入力された質問Qをミキサー11及びアンテナ3を介して、航空機91へと送信する。送信器12は、メインビームから送信されるINTパルスを出力する主送信器(図示略)と、オムニビームから送信されるサイドローブ抑圧(SLS)パルスを出力する副送信器(図示略)とを含む。
【0021】
受信器13は、質問Qに対する航空機91からの応答Rを、アンテナ3及びミキサー11を介して受信する。受信器13は、受信した応答RのΣ信号SΣ及びΔ信号SΔのRF信号からIF(Intermediate Frequency)受信信号を生成するとともに、処理してLogΣビデオ信号及びLogΔビデオ信号に変換した後、モードS応答処理器23及びATCRBS応答処理器24に供給する。
【0022】
また、受信器13は、モノパルス測角部31を備えている。モノパルス測角部31は、応答Rを送信してきた航空機91の方位角度θを振幅モノパルス測角方法によって測角するためのものである。
【0023】
図3に示すように、モノパルス測角部31は、IF信号化されたΣ信号SΣを処理するΣ信号処理部32と、IF信号化されたΔ信号SΔを処理するΔ信号処理部33と、モノパルス演算部37とを備えている。
【0024】
Σ信号処理部32は、アンテナ3の複数個所で受信された応答Rを足したΣ信号SΣを処理するものである。Σ信号処理部32は、Log増幅器41と、A/D変換器42と、デジタルI/Q検波器43と、振幅・位相算出器44とを備えている。
【0025】
Log増幅器41は、入力されるΣ信号SΣを振幅情報及び位相情報を含むLog増幅信号SΣLogへと増幅するものである。Log増幅器41は、Log検波器45と、位相検波器46と、ゲイン制御器47とを備えている。
【0026】
Log検波器45は、受信器13から入力するΣ信号SΣから振幅情報を表すLog波形SΣaを検出し、ゲイン制御器47へと出力する。
【0027】
位相検波器46は、受信器13から入力するΣ信号SΣから周波数と位相情報を表す位相波形SΣpを検出し、ゲイン制御器47に出力する。
【0028】
ゲイン制御器47は、Log検波器45から入力するLog波形SΣaで特定される振幅に応じて、位相検波器46から入力する位相波形SΣpの振幅を増幅する。このとき、ゲイン制御器47は、A/D変換器42の最大入力レベルを最大値として、位相波形SΣpの振幅をリアルタイムで制御して、Log波形SΣa及び位相波形SΣpをLog増幅信号SΣLogへと変換する。また、ゲイン制御器47は、Log増幅信号SΣLogをA/D変換器42に出力する。
【0029】
A/D変換器42は、ゲイン制御器47から入力する周波数情報、位相情報及び振幅情報を含むLog増幅信号SΣLogをデジタル信号SΣdにデジタル変換してデジタルI/Q検波器43へと出力する。
【0030】
デジタルI/Q検波器43は、直交検波するためのものである。デジタルI/Q検波器43は、A/D変換器42から入力するデジタル信号SΣdをI(同相)信号SΣIとQ(直交)信号SΣQとに直交検波する。デジタルI/Q検波器43は、分離したI信号SΣI及びQ信号SΣQを振幅・位相算出器44へと出力する。
【0031】
振幅・位相算出器44は、デジタルI/Q検波器43から入力するI信号SΣI及びQ信号SΣQを用いて、信号の強度を示す振幅情報Σaと、信号の位相を示す位相情報Σpとを算出する。振幅・位相算出器44は、振幅情報Σaを振幅比算出器34へと出力する。振幅・位相算出器44は、LogΣビデオ信号を2値化するための応答処理器23、24へと出力する。また、振幅・位相算出器44は、位相情報Σpを位相差算出器35へと出力する。
【0032】
Δ信号処理部33は、アンテナ3の複数個所で受信された応答Rを引き算したΔ信号SΔを処理するものである。Δ信号処理部33は、Log増幅器51と、A/D変換器52と、デジタルI/Q検波器53と、振幅・位相算出器54とを備えている。
【0033】
Log増幅器51は、入力されるΔ信号SΔを振幅情報及び位相情報を含むLog増幅信号SΔLogへと増幅するものである。Log増幅器51は、Log検波器55と、位相検波器56と、ゲイン制御器57とを備えている。
【0034】
Log検波器55は、受信器13から入力するΔ信号SΔから振幅情報を表すLog波形SΔaを検出し、ゲイン制御器57へと出力する。
【0035】
位相検波器56は、受信器13から入力するΔ信号SΔから周波数と位相情報を表す位相波形SΔpを検出し、ゲイン制御器57に出力する。
【0036】
ゲイン制御器57は、Log検波器55から入力するLog波形SΔaで特定される振幅に応じて、位相検波器56から入力する位相波形SΔpの振幅を増幅する。このとき、ゲイン制御器57は、A/D変換器52の最大入力レベルを最大値として、位相波形SΔpの振幅をリアルタイムで制御して、Log波形SΔa及び位相波形SΔpをLog増幅信号SΔLogへと変換する。また、ゲイン制御器57は、Log増幅信号SΔLogをA/D変換器52に出力する。
【0037】
A/D変換器52は、ゲイン制御器57から入力する周波数情報、位相情報及び振幅情報を含むLog増幅信号SΔLogをデジタル信号SΔdにデジタル変換してデジタルI/Q検波器53へと出力する。
【0038】
デジタルI/Q検波器53は、直交検波するためのものである。デジタルI/Q検波器53は、A/D変換器52から入力するデジタル信号SΔdをI(同相)信号SΔIとQ(直交)信号SΔQとに直交検波する。デジタルI/Q検波器53は、分離したI信号SΔI及びQ信号SΔQを振幅・位相算出器54へと出力する。
【0039】
振幅・位相算出器54は、デジタルI/Q検波器53から入力するI信号SΔI及びQ信号SΔQを用いて、信号の強度を示す振幅情報Δaと、信号の位相を示す位相情報Δpとを算出する。振幅・位相算出器54は、振幅情報Δaを振幅比算出器34へと出力する。振幅・位相算出器54は、LogΔビデオ信号を2値化するための応答処理器23、24へと出力する。また、振幅・位相算出器54は、位相情報Δpを位相差算出器35へと出力する。
【0040】
モノパルス演算部37は、振幅情報Σa、位相情報Σp、振幅情報Δa、位相情報Δpから航空機91の方位角度θを演算する。モノパルス演算部37は、振幅比算出器34と、位相差算出器35と、方位角度算出部36とを含む。
【0041】
振幅比算出器34は、振幅・位相算出器44、54から入力された振幅情報Σa、Δaを以下の式に代入して、図4に示すアンテナ3正面からの航空機91のずれ角度(オフボアサイト角度)Θに対応する振幅比情報Iaを算出する。
Ia=k×arctan(Δa/Σa) ・・・(1)
【0042】
位相差算出器35は、振幅・位相算出器44、54から入力された位相情報Σp、Δpを以下の式に代入して、航空機91がアンテナ3の正面に対して右、左のいずれに位置しているかを示す位相差情報Ipを算出する。
Ip=Σp−Δp ・・・(2)
尚、位相差算出器35には、位相オフセット記憶部61に記憶された位相オフセット値Voffが入力される。位相差算出器35では、位相情報Σp、Δpが位相オフセット値Voffによってオフセットされる。これにより、アンテナ3の略正面(即ち、ずれ角度Θが略「0」)の航空機91の位相差情報Ipを正確に算出することができる。
【0043】
方位角度算出部36は、振幅比情報Ia及び位相差情報Ipからモノパルス値MPを算出する。方位角度算出部36は、図5に示すルックアップテーブルから演算したモノパルス値MPに対応するずれ角度Θを算出する。方位角度算出部36は、前述したずれ角度Θとアンテナ3のアジマス値Vazから航空機91の方位角度θを演算する。方位角度算出部36は、演算した方位角度θを応答処理器23、24へと出力する。
【0044】
図2に示すように、処理部5は、送信制御器21と、チャネル管理器22と、モードS応答処理器23と、ATCRBS応答処理器24と、タイミング信号発生器25と、監視処理器26とを備えている。
【0045】
送信制御器21は、監視処理器26から供給される情報に基づき、質問Qを生成する。送信制御器21は、送信器12及びミキサー11を介して、生成した質問Qをアンテナ3から送信する。
【0046】
チャネル管理器22は、タイミング信号発生器25からの信号に基づき、質問や応答のスケジューリングを行う。
【0047】
モードS応答処理器23は、モードS用のトランスポンダ92を搭載した航空機91からのモードS用の応答Rを検出して、処理する。
【0048】
ATCRBS応答処理器24は、ATCRBS用のトランスポンダ92を搭載した航空機91からのモードA/C用の応答Rを検出して、処理する。
【0049】
タイミング信号発生器25は、処理部5全体のシステムを統括制御すべく、アンテナ3の方位方向におけるシステムの動作や質問信号形成等のためのタイミングを形成して供給する。
【0050】
監視処理器26では、航空機91との間の質問Q及び応答Rに必要な情報が記憶され、相関処理等の種々の処理を実行している。監視処理器26では、航空機91の方位角度θの情報によって、次の応答Rを受信する際の当該航空機91の位置を予測する。
【0051】
次に、二次監視レーダ装置1による航空機91の方位角度を測角するモノパルス測角処理について説明する。
【0052】
図1に示すように、二次監視レーダ装置1が、航空機91に質問Qを送信する。航空機91は、質問Qを受信すると、質問Qに対応した応答Rを送信する。二次監視レーダ装置1では、アンテナ3によって応答Rを受信する。この後、アンテナ3で受信された応答Rから生成されたΣ信号SΣ及びΔ信号SΔが、受信器13へと送信される。この後、受信器13のモノパルス測角部31では、モノパルス測角処理が行われる。
【0053】
まず、図3に示すように、モノパルス測角部31には、ミキサー11を介して、アンテナ3で受信された応答Rから生成されたΣ信号SΣ及びΔ信号SΔが入力される。
【0054】
Σ信号SΣは、Log増幅器41のLog検波器45及び位相検波器46へと入力される。Log検波器45は、Σ信号SΣから振幅情報を表すLog波形SΣaを検出し、ゲイン制御器47へと出力する。一方、位相検波器46は、Σ信号SΣから周波数と位相を表す位相波形SΣpを検出し、ゲイン制御器47へと出力する。ゲイン制御器47は、A/D変換器42の最大入力レベル以下に振幅がなるように、Log波形SΣaに基づいて位相波形SΣpの振幅を増幅して、Σ信号SΣの振幅情報及び位相情報を含むLog増幅信号SΣLogへと変換する。ゲイン制御器47は、Log増幅信号SΣLogをA/D変換器42へと出力する。
【0055】
A/D変換器42は、Log増幅信号SΣLogをデジタル信号SΣdへと変換した後、デジタルI/Q検波器43へと出力する。デジタルI/Q検波器43は、デジタル信号SΣdをI信号SΣIとQ信号SΣQとに分離して、それぞれを振幅・位相算出器44へと出力する。振幅・位相算出器44は、I信号SΣI及びQ信号SΣQから振幅情報Σa及び位相情報Σpを算出する。振幅・位相算出器44は、振幅情報Σaを振幅比算出器34へと出力するとともに、位相情報Σpを位相差算出器35へと出力する。
【0056】
一方、Δ信号処理部33でも、Σ信号処理部32と略同様の処理が行われる。以下、簡単に、Δ信号処理部33での処理について説明する。まず、Δ信号処理部33のLog増幅器51では、Δ信号SΔをΔ信号SΔの振幅情報及び位相情報を含むLog増幅信号SΔLogへと増幅する。次に、A/D変換器52では、Log増幅信号SΔLogをデジタル信号SΔdへとデジタル変換する。その後、デジタルI/Q検波器53では、デジタル信号SΔdをI信号SΔI及びQ信号SΔQへと直交検波する。次に、振幅・位相算出器54では、I信号SΔI及びQ信号SΔQから振幅情報Δa及び位相情報Δpを算出する。そして、振幅・位相算出器54は、振幅情報Δaを振幅比算出器34へと出力するとともに、位相情報Δpを位相差算出器35へと出力する。
【0057】
振幅比算出器34は、入力された振幅情報Σa、Δaと式(1)とに基づいて、ずれ角度Θに対応する振幅比情報Iaを算出して、方位角度算出部36へと出力する。位相差算出器35は、入力された位相情報Σp、Δpと式(2)とに基づいて、位相差情報Ipを算出して、方位角度算出部36へと出力する。
【0058】
方位角度算出部36では、振幅比情報Ia及び位相差情報Ipに基づいて、モノパルス値MPを算出する。その後、方位角度算出部36は、図5に示すルックアップテーブルにモノパルス値MPを適用して、ずれ角度Θを算出する。例えば、モノパルス値MP=aの時は、ずれ角度Θ=+b[deg]となり、モノパルス値MP=0の時は、ずれ角度Θ=−c[deg]となる。方位角度算出部36は、ずれ角度Θとアジマス値Vazから航空機91の方位角度θを算出して、応答処理器23、24へと出力する。
【0059】
上述したように第1実施形態による二次監視レーダ装置1では、Log増幅器41(51)によって、振幅情報を示すLog波形SΣa(SΔa)及び位相波形SΣp(SΔp)を含んだままでΣ信号SΣ(Δ信号SΔ)をLog増幅信号SΣLog(SΔLog)に増幅した後、A/D変換器42(52)によりデジタル変換している。この結果、振幅情報と位相情報とを別々に処理する従来のモノパルス測角方法に比べて、二次監視レーダ装置1の構成を簡略化することができる。
【0060】
また、従来のように振幅情報と位相情報とを別々にアナログ信号の状態で処理した場合、ケーブル等による遅延や減衰が生じていた。このため、受信器13が有するRF部(図示略)での位相調整に多大な時間を必要としていた。一方、第1実施形態による二次監視レーダ装置1では、Log波形SΣa(SΔa)と位相波形SΣp(SΔp)とを含むLog増幅信号SΣLog(SΔLog)をA/D変換器42(52)によって、デジタル信号SΣd(SΔd)に変換している。これにより、RF部での位相調整を必要としないので、容易に二次監視レーダ装置1を設定することができる。
【0061】
以上、実施形態を用いて本発明を詳細に説明したが、本発明は本明細書中に説明した実施形態に限定されるものではない。本発明の範囲は、特許請求の範囲の記載及び特許請求の範囲の記載と均等の範囲により決定されるものである。以下、上記実施形態を一部変更した変更形態について説明する。
【0062】
上述した実施形態の数値、構成等は適宜変更及び省略可能である。
【0063】
上述した実施形態では、振幅モノパルス方法を採用した二次監視レーダ装置に本発明を適用したが、位相モノパルスを採用した二次監視レーダ装置に本発明を適用してもよい。
【符号の説明】
【0064】
1 二次監視レーダ装置
2 地上局
3 アンテナ
4 送受信部
5 処理部
11 ミキサー
12 送信器
13 受信器
21 送信制御器
22 チャネル管理器
23 モードS応答処理器
24 ATCRBS応答処理器
25 タイミング信号発生器
26 監視処理器
31 モノパルス測角部
32 Σ信号処理部
33 Δ信号処理部
34 振幅比算出器
35 位相差算出器
36 方位角度演算部
41、51 Log増幅器
42、52 A/D変換器
43、53 デジタルI/Q検波器
44、54 振幅・位相算出器
45、55 Log検波器
46、56 位相検波器
47、57 ゲイン制御器
61 位相オフセット記憶部
91 航空機
92 トランスポンダ
Ia 振幅比情報
Ip 位相差情報
MP モノパルス値
Q 質問
R 応答
SΣ Σ信号
SΔ Δ信号
SΣa、SΔa Log波形
SΣp、SΔp 位相波形
SΣLog、SΔLog Log増幅信号
SΣd、SΔd デジタル信号
SΣI、SΔI I信号
SΣQ、SΔQ Q信号
Vaz アジマス値
Voff 位相オフセット値
Σa、Δa 振幅情報
Σp、Δp 位相情報
Θ ずれ角度
θ 方位角度
【特許請求の範囲】
【請求項1】
移動体のトランスポンダから送信される信号を受信して、モノパルス測角方式によって移動体の方位角度を測角する二次監視レーダ装置において、
受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するΣ増幅手段と、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するΣA/D変換手段とを有するΣ信号処理部と、
受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するΔ増幅手段と、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するΔA/D変換手段とを有するΔ信号処理部と、
前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するモノパルス演算部とを備えていることを特徴とする二次監視レーダ装置。
【請求項2】
前記Σ増幅手段は、
前記Σ信号のΣ振幅情報を表すΣLog波形を検出するΣLog検波手段と、
前記Σ信号のΣ位相情報を表すΣ位相波形を検出するΣ位相検波手段と、
前記ΣLog波形で表されるΣ振幅情報に応じて、前記Σ位相検波手段から入力されるΣ位相波形の振幅を制御して前記Σ増幅信号に変換するΣゲイン制御手段とを備え、
前記Δ増幅手段は、
前記Δ信号のΔ振幅情報を表すΔLog波形を検出するΔLog検波手段と、
前記Δ信号のΔ位相情報を表すΔ位相波形を検出するΔ位相検波手段と、
前記ΔLog波形で表されるΔ振幅情報に応じて、前記Δ位相検波手段から入力されるΔ位相波形の振幅を制御して前記Δ増幅信号に変換するΔゲイン制御手段とを備えていることを特徴とする請求項1に記載の二次監視レーダ装置。
【請求項3】
前記モノパルス演算部に入力される位相オフセット値であって、前記Σ位相情報と前記Δ位相情報とをオフセットする位相オフセット値が記憶される位相オフセット記憶部を備えていることを特徴とする請求項1または請求項2に記載の二次監視レーダ装置。
【請求項4】
前記Σ信号処理部は、前記Σデジタル信号をΣ同相信号とΣ直交信号とに直交検波するΣ直交検波手段と、前記Σ同相信号とΣ直交信号とからΣ振幅情報とΣ位相情報とを算出するΣ振幅・位相算出手段とを有し、
前記Δ信号処理部は、前記Δデジタル信号をΔ同相信号とΔ直交信号とに直交検波するΔ直交検波手段と、前記Δ同相信号とΔ直交信号とからΔ振幅情報とΔ位相情報とを算出するΔ振幅・位相算出手段とを有することを特徴とする請求項1〜請求項3のいずれか1項に記載の二次監視レーダ装置。
【請求項5】
移動体のトランスポンダから送信される信号を受信して、移動体の方位角度を演算する二次監視レーダ装置によるモノパルス測角方法において、
受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するステップと、
前記Σ増幅信号を前記Σデジタル信号にデジタル変換するステップと、
受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するステップと、
前記Δ増幅信号を前記Δデジタル信号にデジタル変換するステップと、
前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するステップとを備えていることを特徴とする二次監視レーダ装置によるモノパルス測角方法。
【請求項1】
移動体のトランスポンダから送信される信号を受信して、モノパルス測角方式によって移動体の方位角度を測角する二次監視レーダ装置において、
受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するΣ増幅手段と、前記Σ増幅信号を前記Σデジタル信号にデジタル変換するΣA/D変換手段とを有するΣ信号処理部と、
受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するΔ増幅手段と、前記Δ増幅信号を前記Δデジタル信号にデジタル変換するΔA/D変換手段とを有するΔ信号処理部と、
前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するモノパルス演算部とを備えていることを特徴とする二次監視レーダ装置。
【請求項2】
前記Σ増幅手段は、
前記Σ信号のΣ振幅情報を表すΣLog波形を検出するΣLog検波手段と、
前記Σ信号のΣ位相情報を表すΣ位相波形を検出するΣ位相検波手段と、
前記ΣLog波形で表されるΣ振幅情報に応じて、前記Σ位相検波手段から入力されるΣ位相波形の振幅を制御して前記Σ増幅信号に変換するΣゲイン制御手段とを備え、
前記Δ増幅手段は、
前記Δ信号のΔ振幅情報を表すΔLog波形を検出するΔLog検波手段と、
前記Δ信号のΔ位相情報を表すΔ位相波形を検出するΔ位相検波手段と、
前記ΔLog波形で表されるΔ振幅情報に応じて、前記Δ位相検波手段から入力されるΔ位相波形の振幅を制御して前記Δ増幅信号に変換するΔゲイン制御手段とを備えていることを特徴とする請求項1に記載の二次監視レーダ装置。
【請求項3】
前記モノパルス演算部に入力される位相オフセット値であって、前記Σ位相情報と前記Δ位相情報とをオフセットする位相オフセット値が記憶される位相オフセット記憶部を備えていることを特徴とする請求項1または請求項2に記載の二次監視レーダ装置。
【請求項4】
前記Σ信号処理部は、前記Σデジタル信号をΣ同相信号とΣ直交信号とに直交検波するΣ直交検波手段と、前記Σ同相信号とΣ直交信号とからΣ振幅情報とΣ位相情報とを算出するΣ振幅・位相算出手段とを有し、
前記Δ信号処理部は、前記Δデジタル信号をΔ同相信号とΔ直交信号とに直交検波するΔ直交検波手段と、前記Δ同相信号とΔ直交信号とからΔ振幅情報とΔ位相情報とを算出するΔ振幅・位相算出手段とを有することを特徴とする請求項1〜請求項3のいずれか1項に記載の二次監視レーダ装置。
【請求項5】
移動体のトランスポンダから送信される信号を受信して、移動体の方位角度を演算する二次監視レーダ装置によるモノパルス測角方法において、
受信した信号から生成されるΣ信号をΣ振幅情報及びΣ位相情報を含むΣ増幅信号に増幅するステップと、
前記Σ増幅信号を前記Σデジタル信号にデジタル変換するステップと、
受信した信号から生成されるΔ信号をΔ振幅情報及びΔ位相情報を含むΔ増幅信号に増幅するステップと、
前記Δ増幅信号を前記Δデジタル信号にデジタル変換するステップと、
前記Σ振幅情報、前記Σ位相情報、前記Δ振幅情報及び前記Δ位相情報から移動体の方位角度を演算するステップとを備えていることを特徴とする二次監視レーダ装置によるモノパルス測角方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−159992(P2010−159992A)
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願番号】特願2009−821(P2009−821)
【出願日】平成21年1月6日(2009.1.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願日】平成21年1月6日(2009.1.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]