
二重光通信を提供する方法およびそのための光変調器
二重自由空間光通信を提供する方法であって、タイムシフトキーイング(TSK)によってエンコードされた信号を受信すること、およびオン−オフキーイング(OOK)信号を送信するために、受信したTSKパルスを選択的に再変調し、場合によっては逆反射させること、を備える方法。関連の装置および信号も提供される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光通信、特には自由空間光通信(これに限られるわけではないが)のための装置、方法、信号、および他の関連の態様、ならびにそれらを取り入れてなるシステムに関する。
【背景技術】
【0002】
自由空間光通信システムの可能性は、視線上の2点の間に広帯域のデータリンクをもたらすための手段として、広く認知されている。そのようなシステムについて、大都市地域における通信リンクの構成要素としての用途、および開いた間取りの事務所(open plan office)におけるローカルエリアネットワークの構成要素としての用途など、いくつかの用途が考えられている。
【0003】
本出願と同時に係属中である米国特許出願第10/483,738号(A.M.Scottら)が、間隔を制御することができるエタロンとエタロンを介して受信される光を再びエタロンを通って光源に向かって反射させるように構成された逆反射器とを組み合わせて使用する動的な光反射器およびインタロゲーションシステムを開示している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、一般的には光通信、特には自由空間光通信のための優れた方法、装置、および信号を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の態様によれば、二重光通信を提供する方法であって、タイムシフトキーイングによってエンコードされた信号を受信すること、およびオン−オフ信号を送信するために、受信したパルスを選択的に変調すること、を備える方法が提供される。
【0006】
変調器が、受信したパルスを選択的に透過させることができる。
【0007】
透過したパルスを、逆反射させることができる。
【0008】
さらに本発明は、通信の目的のためのシステムであって、本発明を具現化する装置の1つ以上の実例を、他のさらなる装置とともに備えるシステムに関する。
【0009】
特には、本発明のさらなる態様によれば、選択的に透過性となる素子であって、動作時に、タイムシフトキーイングによってエンコードされた入射信号の連続するパルスを選択的に変調して、オン−オフエンコードされた信号をもたらすように構成された素子、を備える光信号変調器が提供される。
【0010】
光変調器は、連続するパルスを選択的に逆反射させるように構成された逆反射器を備えることができる。
【0011】
変調器は、変調された連続するパルスを反射させるための反射器を備えることができる。
【0012】
反射器は、逆反射器であってよい。
【0013】
さらに本発明は、本発明の他の態様によって使用される信号にも向けられている。
【0014】
特には、本発明のさらなる態様によれば、オン−オフのパルスによってエンコードされた信号であって、タイムシフトキーイングによってエンコードされた第2の光信号に応答して生成された信号を備え、信号のオンパルスが、タイムシフトキーイングによってエンコードされた第2の光信号の時間シフトの特徴を呈している光通信信号が提供される。
【0015】
本発明のさらなる態様によれば、タイムシフトキーイングによってエンコードされた第1の信号と、オン−オフによってエンコードされた第2の信号とを備え、オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号の対応するパルスを時間遅延させてなる導出物であり、オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号のパルスから派生した時間シフトの特徴を呈している複合光信号が提供される。
【0016】
さらに本発明は、機械で読み取ることができる形式のコンピュータソフトウェアであって、動作時に上記装置および/または方法のすべての機能を実行するように構成されたコンピュータソフトウェアを提供する。
【0017】
当業者にとって明らかであるとおり、好ましい特徴を適宜に組み合わせることができ、本発明の任意の態様に組み合わせることができる。
【0018】
次に、本発明をどのように実行に移すことができるかを示すため、本発明の実施形態を、以下で添付の図面を参照しつつ、あくまで例として説明する。
【発明を実施するための最良の形態】
【0019】
図1aから図1cを参照すると、(1つ以上の)光ビームの強度を制御するために使用できる変調器が、単一の素子10にもとづいており、あるいは1つ以上のマイクロミラー10が基板13の上方に支持12されているMOEMSミラー構造のアレイ11にもとづいている。この構成を、基板(例えば、シリコン)が光学的に透過性である波長の透過に使用することができ、実質的により広い範囲の波長の反射に使用することができる。
【0020】
個々の素子は、1ミクロン未満から数ミクロンの間の間隔にて基板13の上方に支持されたマイクロミラー10を有する。マイクロミラーは、基板とマイクロミラーとの間に電圧が加えられたときに、静電気力によってマイクロミラーが平衡位置(電圧が加えられていない)から基板に向かって引かれるように、ばね14によって支持されている。
【0021】
電圧駆動の静電気デバイスにおいては、所与のしきい値未満であれば、静電気力がデバイスの変位に起因する機械的な復帰力と平衡して、デバイスが安定な平衡状態となる。このしきい値を超えると、静電気力が復帰力を超え、マイクロミラーが基板に向かって制御不能に移動する(一般に「ラッチ」、「プルイン」、または「プルダウン」として知られている状態)ため、デバイスは不安定になる。しきい値を超える電圧を加えることで、所与の駆動電圧においてより大きな範囲(典型的には、しきい値未満の仕組みに対して約3倍)でミラーを動かすことができる。
【0022】
マイクロミラーは、任意の平面形状であってよいが、実質的に平坦かつ基板に平行でなくてはならない。マイクロミラーは、有利には正方形であってよいが、他の形状であってもよい。アレイにおいて密に密集させることができる形状(例えば、三角形、長方形、および六角形)が、特に好ましい。
【0023】
このデバイスへと光15aが導かれると、光の一部は反射15bされ、一部は基板へと透過15cして、反対側から出る(基板が透過性であるような波長の場合)。支持ミラーによる反射および透過光が、基板による反射および透過光と干渉し、したがってデバイスの実際の透過および反射は、デバイスへの光の入射の角度、支持ミラーと基板との間の間隔、ならびに支持マイクロミラーの厚さ、マイクロミラーの素材の屈折率、および入射光の波長などといったシステムの他の所定の特性に応じて、高低の値の間でさまざまである。
【0024】
動作時、マイクロミラーと基板との間の間隔が変化するにつれ、透過が高低の値の間で変化し、すなわち入射光の変調手段がもたらされる。変調は、透過または反射モードにて機能することができる。マイクロミラーが、典型的には厚さが1ミクロン未満であって、シリコンが高度に吸収性である可視の領域においても半透明であり、したがってシリコンから製作される変調器を、可視の帯域において反射に使用できることに留意されたい。当業者にとって明らかであると考えられるが、例えば二酸化シリコンまたはチッ化シリコンなど、シリコン以外の材料も使用可能である。この場合、基板は、透明でなければならない(例えば、二酸化シリコンまたはチッ化シリコンであってよい)と考えられ、マイクロミラーおよび底層は、二酸化シリコンまたはチッ化シリコン、あるいはシリコンの薄い層または材料の組み合わせであると考えられる。
【0025】
変調器の透過および反射特性を、本明細書の式2に提示されるように、ファブリーペローエタロンによる透過および反射についての既知の式を使用して、説明することができる。反射および透過光が、位相のシフトならびに振幅の変化を受けることに、留意されたい。これを、光ビームの位相の変調が求められるデバイスにおいて利用することも可能である。
【0026】
マイクロミラーは、ミラーを密にタイル状に並べることによって広い領域を覆うアレイとして製造される場合、空間光変調器(SLM)となる。SLMにおいて、マイクロミラーを、個々に制御することができ、グループにて制御することができ、あるいはすべてをまとめて制御することができる。好ましくは、マイクロミラーアレイの素子が、コヒーレントに動くように構成または操作され、すなわち得られる光の位相がアレイの全体にわたって一様であるように、同じタイミングおよび振幅で同期して動くように構成され、多数の(おそらくはすべての)マイクロミラーのグループにおいて、デバイスへと入射する波面の各部に実質的に一様な効果をもたらすために、素子が一緒に動く。これは、変調された光の回折特性が、広がった波面によって決定され、単一のマイクロミラー素子による回折によって決定されるわけではないという利益を有する。小さなミラーからなるアレイは、より大きなデバイスと比べたとき、ミラーの平坦性を良好に保ちつつ、高い速度の達成を可能にする。
【0027】
マイクロミラーはそれぞれ、2つの電圧状態を使用して制御されたときのミラーの位置を確証できる2つの安定位置の間で操作される。その第1は、ミラーと基板との間に電圧が加えられていない(あるいは、所与のしきい値を下回る電圧が加えられている)ときに、マイクロミラー10が基板の上方に動かずに支持されている「平衡位置」である。電圧が加えられない実施形態においては、支持ばね14の伸びは存在しない。別の実施形態においては、変調器の状態が変化するときに電池を充電することによって変調器の全体としての電力消費を低減するために、しきい値未満の電圧が加えられる。ミラーは、静電気力と機械的な力とが平衡するより下方の平衡位置(元の平衡位置(電圧が加えられていない)と基板との間)に位置することになる。
【0028】
第2の位置は、しきい値を超える電圧が加えられ、マイクロミラーが基板に向かって強く引き下げられた「プルダウン」位置である。
【0029】
絶縁ストッパ(例えば、ボスまたは他の隆起した電気絶縁性のフィーチャ)16を、基板とマイクロミラーとの間に設けることができ、したがって電圧がしきい値を超えたとき、ミラーがストッパへと引き寄せられて当接するが、それ以上基板に向かって引き寄せられることはない。したがって、このようなプルダウンストッパによれば、望ましくないマイクロミラーと基板との間の電気的接触を防止することができる。そのような電気的接触は、短絡および電気的損傷につながりかねない。さらに、1つ以上の終端ストッパを取り入れることで、プルダウン位置にあるときのミラーと基板との間に、所定のオフセットを定めることができる。さらに、機械的な減衰がもたらされ、静止までの時間が短くなる。有利なことに、このオフセットを、幅広い角度範囲にわたって透過が少ない状態に対応するように、特定的に設計することができる。好ましくは、終端ストッパは、機械的な接触の付着エネルギーに打ち勝つべく追加のエネルギーをもたらすために、プルダウン位置のミラーにわずかな湾曲をもたらすことができるように構成される。考えられる一実施形態においては、実質的に正方形または矩形のミラーが、ミラーのそれぞれの角またはその付近、ならびにミラーの中央またはその付近に、終端ストッパを取り入れている。
【0030】
ミラーは、MEMSプロセス、好ましくは多結晶シリコン表面マイクロマシニングプロセスを使用して実現できる。好ましくは、終端ストッパが、基板上の1つ以上のブシュ16(絶縁されたアイランド)およびミラーの下方のくぼみ17を使用して実現される。さらに好ましくは、ブシュを、チッ化シリコンおよび/または多結晶シリコンで構成でき、ミラーおよびくぼみを、多結晶シリコンで構成できる。
【0031】
小さな電圧が加えられたとき、マイクロミラーは、平衡位置からわずかな量だけ移動する。電圧が特定のしきい値を超えると、この移動が不安定になり、マイクロミラーが「プルダウン位置」へとぱたりと落ち込む(snap down)。アナログの制御電圧を加えて、マイクロミラーを基板からの任意の距離へと動かすことは、電圧について微細な制御が必要であり、アレイ内のミラー間で経路長が相違するがために電圧降下に左右されやすいことから、困難である。通常または単純な制御システムにおいては、アナログ制御のもとでのマイクロミラーの移動は、平衡位置とプルダウン位置との間の道程のうちの約3分の1に限られ、その後にマイクロミラーは、勢いよく完全なプルダウン位置へと移動してしまう。実際には、本発明においては、このスナップダウン位置が好ましく使用され、2つの不連続な電圧状態を使用してマイクロミラーが平衡位置とプルダウン位置との間で好ましく切り替えられる。
【0032】
マイクロミラーに印加電圧信号からもたらされる力が加えられるとき、その運動は、ミラーの機械的な共振周波数および大気の減衰効果によって決定される。ミラーならびにミラーのばね系が、通常の市販のソフトウェアツールで割り出すことができる共振周波数にて、古典的な共振器として挙動する。所与の構成における正確な共振周波数は、ばねの強さおよびミラーの質量ならびに減衰の程度に依存する。例えば、2つの直線ばねおよびサイズが25ミクロン×25ミクロンであるミラーからなる典型的な構造においては、この共振周波数は、300kHz程度であり得る。より大きなミラーは、これよりも大幅に低い共振周波数を有し得る。より剛なばねを備えるデバイスは、これよりも大幅に高い共振周波数を有し得る。
【0033】
大気圧および数十ミリバールまでの圧力においては、空気がマイクロミラーの運動を大きく減衰させ、状態間の変化に要する時間が、この減衰プロセスによって支配される。数ミリバール以下の圧力においては、マイクロミラーは、高Q共振器として挙動し、すなわち強い振動の形式で運動する。この振動は、ミラーが引き下げられて、プルダウンストッパに当接して保持されるときには、プルダウンストッパが機械的な減衰をもたらすがゆえに生じないが、マイクロミラーが印加電圧をゼロ(または、プルダウン位置への保持に必要なしきい値を下回る電圧)へと切り替えることによってプルダウン位置から解放されるときに明白である。
【0034】
マイクロミラーが真空中で解放される場合、マイクロミラーは、平衡位置に向かって跳ね上がり、次いでこの位置を中心にして、各周期の後にプルダウン位置の近くへと戻るように振動する。これに対する減衰は、おそらくはきわめて弱く、したがって運動が、きわめて予測可能な形式で継続し、振幅および周波数は、正確な真空の程度や最初にマイクロミラーを保持するために使用されていた絶対的な電圧に比較的無関係である。
【0035】
基板の上方のマイクロミラーの変位は、
x(t)=x0−(x0−x1)cos(Ωt)exp(−βt) (1)
によって与えられ、
ここでxは、基板からマイクロミラーまでの距離であり、x0は、平衡位置であり、x1は、プルダウン位置であり、tは、マイクロミラーの解放からの時間であり、Ωは、共振周波数であり、βは、減衰係数である。
【0036】
低い圧力においては、振動の減衰係数が小さく、したがって振動がオーバーシュートを呈するため、例えばプレートに必要とされる最大の離間(マイクロミラーと基板との間の離間)が1.5ミクロンである場合、平衡位置を0.75ミクロンの付近となるように設計し、必要とされる最大の離間を達成するためにオーバーシュートに頼ることが可能である。プレートの離間の全範囲が、エタロンが基板からの最小の離間から最大の離間まで移動する第1の半サイクルにおいて対処される。半周期と全周期との間の或る時刻の後で、基板の電圧が再び印加され、プレートが振動を続けているため、再び基板に向かって移動し、マイクロミラーが印加電界によって再び拘束され、最初の「プルダウン」位置へと復帰する。1周期における典型的なプレートの離間は、時間に対して、図2に示したとおりであり、水平軸が時間を(任意単位で)示し、垂直軸がマイクロミラーの基板からの隔たりを示している。この図示の例では、平衡位置は1ミクロンである。代案として、マイクロミラーを所定の回数(1、2、または3以上)だけ振動させ、その後に電圧を再印加して、マイクロミラーをプルダウン位置に再拘束することも可能である。
【0037】
このやり方でマイクロミラーの解放のタイミングを制御することによって、運動の全範囲にわたってミラー位置の制御を、細かな電圧の制御にではなく、タイミング制御に依存して行うことができる。そのような細かいタイミングの制御は、高速なデジタル電子機器(例えば、0.35ミクロンのCMOS)を使用して達成することができる。
【0038】
次に、図3aおよび図3bを参照すると、ファブリーペローエタロンにおける透過および反射の式(式2が透過を示している)を、時間とともに変化するマイクロミラーと基板との間の間隔の式に組み合わせて使用して、エタロンミラーの間隔が図3aおよび図3bに示すような時間依存に従うときのマイクロミラーの透過の時間変化を割り出すことができる。図3aが、垂直入射についての実験による透過のデータを示す一方で、図3bは、60度の入射角度の場合の該当のデータを示している。やはり、水平軸が、時間を示す一方で、垂直軸は、マイクロミラーの光の透過を示している。
【0039】
図示の第1の例においては、エタロンの面に垂直に入射する光について、マイクロミラーが上昇して基板から離れるときに2つの透過のピークが生じ、これに対応する2つのピークが、マイクロミラーが基板に向かって引き戻されるときに生じる。第2の例は、60度の場合には、マイクロミラーが最大変位へと移動するときに透過のピークが1つ存在し、プルダウン位置へと戻るときに第2のピークが存在することを示している。しかしながら、ピークのタイミングおよび数は、光ビームの入射の角度とともに変化し、したがってエタロンのタイミングを最適化するためには、入射の角度を知ることが強く望まれる。それぞれのグラフは、2つの温度(約20度および70度)における透過特性を示しており、これら2つの動作値の間に良好な度合いの一貫性が見られている。
【0040】
あるいは、振動パターンの測定を、変調器への光の入射の角度を割り出すために使用することができる(実際には、cos(θ)についての測定(θは入射の角度)がもたらされる)。
【0041】
このデバイスを、検出器システムが変調器によって生み出される動的な変調を解像できるのであれば、連続波(CW)レーザ(または、予測可能なパルスパターンを有するレーザ)を制御するために使用することができる(図9bおよび図9c)。あるいは、パルスの継続時間がマイクロミラーの振動の周期よりも有意に短いならば、繰り返しパルスレーザを制御するために使用することができる(図9a)。この場合、インタロゲータシステム(新たな図10または図9c)の検出器は、必ずしも変調器の動的な挙動を解像できる必要はなく、インタロゲータの個々のパルスを解像できればよい。入射パルスの到着時刻を検出する検出器からなるタイミング回路を使用することができ、入射パルスのタイミングが、次のパルスの正確な到着時刻を予測するために使用される。マイクロミラーをプルダウン位置に保持し、レーザパルスの到着予定時刻においてマイクロミラーシステムがパルスに所望の量の変調を加えるための位置にあるように、計算された時刻に解放することができる。
【0042】
次に図4を参照すると、エタロンの動的な応答が、時間(クロックパルス)に対して示されている。最も上部の軌跡41は、入射するレーザパルスを示しており(任意単位)、中央の軌跡42は、マイクロミラーへと加えられる電圧(プルダウン電圧が、「2.5×10−6」に対応し、0Vが、「2×10−6」に対応している)を示しており、最も下方の軌跡43は、基板とMEOMSミラーとの間の間隔を示している(目盛りはメートル)。
【0043】
レーザパルスが、最大変位の付近において到着した場合(第1および第3のパルス)、透過が最大であり、論理1が伝達される。レーザパルスが、ミラーが基板に近いときに到着した場合(第2のパルス)、透過は最小であり、論理0(ゼロ)が伝達される。
【0044】
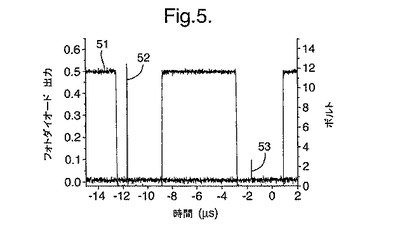
次に図5を参照すると、軌跡51が、マイクロミラーの駆動電圧を示しており、軌跡52、53が、2つのレーザパルスの透過パワーを示している場合について、実験データを示している。マイクロミラーの解放と第1のパルスの到着との間の遅延は、透過が大52であるようにされている。マイクロミラーの解放と第2のパルスの到着との間の遅延は、透過が小52であるようにされている。
【0045】
変調器を、逆反射器、検出器、および駆動用電子機器と一緒に使用して、図9cに示されているように遠方のインタロゲータシステムと通信できるトランスポンダを形成することができる。右側に、トランスポンダが図示される一方で、左側には、コリメータレンズ98を備えたレーザ95および集光レンズ96を備えた検出器97が示されている。トランスポンダが充分に遠く、トランスポンダからの光が回折および拡散して、レーザインタロゲータへと戻るだけでなく、広がって受信光学系にも進入する場合、検出器が、どの光がトランスポンダから反射されて戻されたのかを検出する。この場合、インタロゲータが、遠方のトランスポンダによって生み出された変調を検出する。
【0046】
受信されるパルスに加えられる変調は、振幅変調、または移動変調、あるいは両者であってよい。
【0047】
真にCWであるインタロゲータにおいては、トランスポンダが、必ずしも検出器を必要とせず、単純にインタロゲータによって検出される変調パターンを送り出すことができる。あるいは、インタロゲータの光の存在を検出するために、検出器を使用してもよい。擬似CW変調インタロゲータにおいては、トランスポンダの検出器が、インタロゲータのビーム内のタイミング情報(例えば、強度の急上昇または強度の中断)を使用し、変調をタイミング情報に同期させることができる。一連の短いパルスを生成するインタロゲータの場合には、トランスポンダが、1つのパルスの到着を検出し、このタイミング情報を、次のパルスの変調を生成するための最適なタイミングを割り出すために使用することができる。最適な解放時刻を、例えば1つのパルスの到着を検出し、到着の角度についての情報を集め、最適な遅延を割り出すべくルックアップテーブルを使用することによって決定できる。例として、システムを、パルスの透過または反射を最大値と最小値との間で切り替えるために使用することができ、もしくはパルスの振幅を、すべてが同じ強度になるように、あるいは何らかのやり方で符号化されるように、制御するために使用することができる。これを、振動の最初の半周期において行うことができる。また、これを、機械的振動の際の任意の予測可能な点において行うことも可能であり、あるいはマイクロミラーを2回振動させ、第2の振動においてパルスの変調を達成することも可能である(全二重の通信を達成したい場合に重要である)。
【0048】
次に図6を参照すると、上述のように、1つのパルスの到着を検出し、この情報を使用して、次のパルスを変調すべくマイクロミラーを解放することができるよう、変調器61に検出器62を組み合わせることができる。
【0049】
次に図7を参照すると、上述の仕組みの変種において、遠方のレーザ発光体を、繰り返しの短パルスレーザシステムを長パルスまたは連続波のレーザシステムに組み合わせて構成することができる。この構成において、短パルスを、タイミングパルスとして使用することが可能である。変調器が、タイミングのための短パルスを使用し、光の連続波部分または長パルス部分に変調を加えることができる。したがって、変調されるビームを、例えばタイミングパルスに対する変調の時間シフトによってエンコードすることができる。インタロゲータが、充分に高速な検出器または敏感な検出器を有する場合には、インタロゲータのビームにタイミング情報を持たせる必要、およびトランスポンダに検出器を持たせる必要は、必ずしもないかもしれない。インタロゲータの検出器が、時間分解された変調を検出でき、あるいは平均の逆反射パワーの小さくかつ高速な変化を検出できる。
【0050】
図7は、タイミングパルス71と擬似CWレーザパルス72とを含むレーザパルスによる変調器61のインタロゲーションを示している。擬似CW部分が変調73されている。各パルスを変調するか、あるいは変調しないかによって、ビームをエンコードすることができ、あるいは変調または時間遅延の変調の適用を選択することができる。最初のタイミングパルスを使用することができ、あるいは矩形波インタロゲーションパルスの立ち上がり縁を使用することができる(左下の例を参照)。変調されたパルスの例は、右の中ほどに示されている。
【0051】
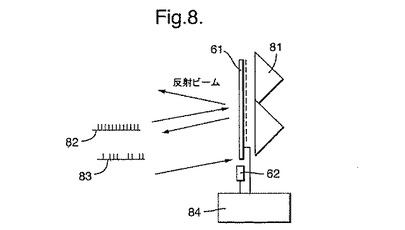
次に図8を参照すると、変調器61を逆反射器81に組み合わせ、変調逆反射器として機能させることができる。変調器のマイクロミラー素子は、例えば差し渡しが25μm程度であってよく、逆反射器の素子は、大幅に大きくてよく、例えば差し渡しが5〜15mmであってよい。個々のマイクロミラーがコヒーレントに動く場合、変調器を通過する光のダイバージェンスは、アレイの全体サイズによって決定され、単一のマイクロミラーによる回折に起因するダイバージェンスによっては決定されない。比較的大きな逆反射素子を使用することは、きわめて平行な反射光ビームを形成する上で役に立つ。したがって、変調逆反射デバイスを、パルスのパターン82を送信するレーザインタロゲータによって照射することができる。変調逆反射デバイスが、到着するパルスを変調し、パルス83をインタロゲータへと逆反射させる。ここで、インタロゲータのパルスは、基本的にパルス状であり、逆反射される光は、完全に逆反射され、あるいは完全に減衰させられる。したがって、インタロゲータは、逆反射されたパルスを受信して、一連の「1」および「0」としてデコードできる。この変調器の構成は、パルスを検出するために検出器62を使用することができ、1つのパルスの検出を使用して次のパルスの到着時刻を予測し、次のパルスを変調すべくマイクロミラーの解放時刻を決定するために、制御ユニット84を使用することができる。この場合、逆反射器への到着の角度が、管理されていなければならず、あるいは逆反射システムが、マイクロミラーの最適な解放のタイミングを決定するために、何らかの形式の角度検出を使用することができる。
【0052】
あるいは、インタロゲータおよび逆反射変調器システムの組み合わせのシステムが、性能を最適化することができる。変調器を、固定の時間遅延で動作させることができ、インタロゲータが、到着の角度を決定し、最適な変調が生じるようにパルスのタイミングを変化させることができる。
【0053】
最大または最小の信号を生み出すための変調器の最適なタイミングは、角度に依存する。上述のシステムが、任意の角度で入射する光について機能すべき場合には、最適なミラーのタイミングが入射光の入射角度に依存して決まるため、検出器が、好ましくは、到着の角度を割り出す手段を取り入れるべきである。あるいは、インタロゲータが、タグへの入射の角度を推定する手段を備え、最大の変調が保証されるようにタグへのパルスのタイミングを変化させてもよい。
【0054】
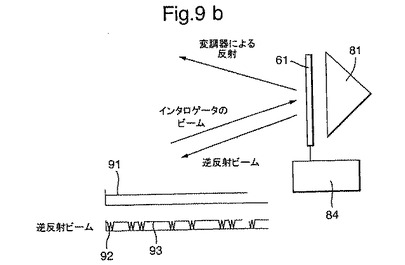
次に、図9aおよび図9bを参照すると、選択肢として、変調逆反射デバイスを、一式の短いタイミングパルスをより強度の低い擬似連続のパルスとともに送信できる(あるいは、送信しなくてもよい)インタロゲータとともに使用することができる。変調逆反射デバイスが、低強度の擬似連続のパルスを、タイミングパルスの後の或る制御された時点において変調できる。デバイスは、このパワーをインタロゲータへと逆反射させる。この構成において、インタロゲータのパルスは、擬似CW周期での変調を含み、逆反射される光は、インタロゲータのパルス状の要素に同期されるが、変調は、インタロゲータの光の擬似CW領域へと加えられる。
【0055】
インタロゲータによって受信される正確な変調パターンは、逆反射デバイスへの到着の角度に依存するが、インタロゲータが、特定のパターンを認識できてもよく、そこから、タイミングパルスに対する最適な時間遅延、および所望であれば入射の角度を決定することができる。
【0056】
擬似連続の波形およびそのタイミングパルスに対するタイミングを測定することによって、インタロゲータは、波形へと加えられた時間シフトの大きさを割り出すことができ、これを1片のデータとして解釈することができる。この後者の手法の利点は、変調装置に角度検出器を取り入れる必要がなく、変調装置を、より小型にでき、より安価に製造できる点にある。
【0057】
次に、図9bを参照すると、インタロゲータが、連続的な光91を生み出すことができ、逆反射される光を、インタロゲータに関連付けられた同期を持たずに、変調92、93することが可能である。
【0058】
次に、図9cを参照すると、全体としてのシステムが、1つ以上の上述のような変調装置を、送信器95と検出器97に組み合わせられた受信テレスコープ96とを備えるインタロゲータレーザシステムとともに備える。
【0059】
第1の角度測定モードにおいて、インタロゲータが、連続波ビームを送信し、トランスポンダから逆反射される光を測定する。トランスポンダは、おそらくはインタロゲータからのいかなる合図も使用せず、「解放および拘束」モードで動作する。「解放および拘束」の各サイクルにおいて、逆反射検出器は、図3に示した信号に定性的に類似した信号、すなわち一連の比較的はっきりした最大値および最小値を含む信号を検出する。いくつかのパルスにわたって測定を行い、積分を行うことで、検出器は、良好に解像された曲線を蓄積することができる。それらの曲線のピークのタイミングは、中央のピークまたは谷の深さまたは高さ同様、トランスポンダへの入射の角度の余弦の関数であり、データについて適切なフィッティングおよび処理を行うことによって、変調器への入射の角度の余弦を割り出すことが可能である。
【0060】
角度測定モードの第2の実施形態においては、インタロゲータが、一連のパルスを送信し、トランスポンダから逆反射される光を測定する。トランスポンダは、「解放および拘束」モードで動作し、インタロゲータからのパルスの検出の後に、所定の時間だけ遅延させて解放時間を開始させる。「解放および拘束」の各サイクルにおいて、逆反射検出器は、トランスポンダからのパルスを検出し、各パルスの振幅を記録できる。インタロゲータが、パルスNとパルスN+1との間の時間遅延が、パルスN−1とパルスNとの間の時間遅延にいくらかの増分Dtを加えた値に等しくなるように、パルス間のタイミングをゆっくりと変化させる場合、結果として、各パルスが、変調器の応答曲線の異なる部分によって変調されることになり、数パルスの期間にわたり、インタロゲータは、変調器の透過プロファイルの全体をストロボ状に採取することになる。このデータによって、インタロゲータは、トランスポンダへの入射の角度を推定することができる。
【0061】
第1の通信モードにおいて、インタロゲータは、変調装置のインタロゲートのために、パルスの列を使用する。変調装置が、到着する信号のタイミングおよび角度検出器からの角度を検出する。過去のパルス列の時間履歴から、変調装置は、次のパルスの到着時刻を予測することができる。変調装置は、内部のクロックおよびルックアップテーブルを使用し、次のパルスが到着するときに変調器によってもたらされる透過が最大または最小のとなるような時点で、マイクロミラーアレイを解放する。あるいは、最小の透過を、単にマイクロミラーをプルダウン位置に保持することによって得てもよい。受信器が、パルスを検出し、論理1であるか、あるいは論理0であるかを判断する。このモードは、最大の範囲にわたって性能をもたらす。
【0062】
第2の通信モードにおいては、インタロゲータが、一連のタイミングパルス(あるいは、タイミングの目的に使用できる鋭い縁を有する一連の矩形パルス)を送信できる(送信しなくてもよい)。これを、インタロゲーション用の擬似連続パワーに重ねることができる。変調装置は、タイミングパルスを検出するが、到着角度の割り出しは試みない。変調装置は、2つのやり方のうちの一方で、「解放および拘束」機構を動作させる。すなわち、論理「1」を示すためにパルスを変調し、論理「0」を示すために変調を行わない(あるいは、この反対)。あるいは、2つの所定の時間遅延のうちの一方において、論理「1」または論理「0」を示すべく変調を行う。前者の利点は、低帯域の検出器で、変調が加えられたか否かを示す小さな透過の変化を検出できる点にある。後者の技法の利点は、論理「1」および論理「0」の検出が能動的に示される点にある。
【0063】
あるいは、真のCWインタロゲーション91において、変調の存在92または非存在93を検出することができ、あるいはインタロゲータが、信号積分時間が変調信号の高周波積分に比べて遅い場合に予想される信号強度の小さな変化を検出できるのであれば、タイムキーシフト変調の存在を検出することができる。
【0064】
インタロゲータは、タイミングパルスおよびアナログの戻りを受信する。到着の角度にかかわらず、逆反射されたタイミングパルスを参照することによって、アナログの戻りのタイミングを認識することができる。
【0065】
遠隔角度検出モードにおいて、目標は、遠方の変調装置への入射の角度を割り出すことにある。これは、例えば、変調装置からの信号を最大にするためにインタロゲータがどの方向に移動すべきかを判断するために、あるいは変調器の向きを割り出すために、有用であると考えられる。インタロゲータが、擬似CWビームで変調器を照らし、マイクロミラーが解放および拘束されるときの時間分解された逆反射を検出する。検出された信号をテンプレートに照らし合わせることによって、プロセッサは、特定の入射角度に一致するテンプレートを特定できる。
【0066】
強度安定化モードにおいて、目標は、(例えばシンチレーションに起因して)入力ビームが繰り返し速度に比べて遅い時間軸において変動しているときに、出力ビームの平均を安定させることにある。入射パワーが、特定の程度の減衰をもたらすように同期させられた変調器に入射する。入射パワーに変動が存在する場合、減衰を調節して、全体としてのレーザパワーが一定の値に保たれるように保証するため、マイクロミラーの解放時刻に小さなタイミングの変化を加えることができる。到着するビームが、例えば論理「1」および論理「0」のパルス列であって、シンチレーションによって生じるよりゆっくりとした強度の変動を有する場合、システムを、このゆっくりと変化する変動が安定化によって取り除かれるが、より高速な論理「1」と論理「0」除との間の変化は残されて、後に検出できるように、変調することができる。この手法を、自由空間光レーザ通信システムにおいて信号を検出するために、大きなダイナミックレンジの検出器の代わりに用いることができる。
【0067】
空間光変調モードにおいては、アレイ上のマイクロミラーのグループが、ビームを横切る空間パターンを生み出すように解放される。これを、例えば信号処理およびビームの操縦など、他の空間光変調器が現在使用されているさまざまな用途に使用することができる。
【0068】
ビーム操縦モードにおいて、個々の素子のそれぞれの解放時刻が制御される場合、マイクロミラーアレイの各素子の位相を効果的に制御することが可能である。各素子の位相を制御することによって、伝搬方向を制御することができる。したがって、これを、それぞれのマイクロミラーを個々に制御できる場合に、レーザビームを所定の方向に操縦するために使用することができる。
【0069】
ファブリーペローエタロンの特徴をさらに詳しく検討すると、MOEMSミラー−基板変調器の透過を、反射率がシリコンへと適用されるフレネル反射の式によって決定される2つの反射面を有する単純な構造としてのシステムを検討することによってモデル化できる。ファブリーペローエタロンの透過は、
【数1】
によって与えられ、ここでφ=(4π/λ)Lcosθである。ここで、プレート間の間隔が、Lによって与えられ、入射の角度が、θによって与えられ、波長は、λである。各表面の反射率が、Rによって与えられ、透過が、Tによって与えられる。
【0070】
変調器およびコーナーキューブ逆反射器の組み合わせを考えると、反射される光が、2つの偏光成分の組み合わせによって決定される点が、注目される。インタロゲータが円偏光または非偏光である場合を考えると、到着の角度にかかわらず、2つの偏光の等しい強度が存在する。入射光が、等しい量の「s」偏光(Eベクトルが表面に平行)および「p」偏光(Eベクトルが透過および反射ビームの平面内にある)の光を有する。それぞれの偏光が異なる量だけ透過し、部分偏光のビームが、コーナーキューブ逆反射器へと進入する。この偏光が、逆反射器の性質に応じて、さまざまな量で解消される。コーナーキューブ逆反射器が金属でコートされている場合には、偏光特性は保存される。コーナーキューブ逆反射器が誘電体に拠る場合には、特定の角度について偏光が大きく解消される。後者の場合、近似として、ビームの偏光がコーナーキューブによって完全に解消されると仮定される。偏光が解消されたビームが、エタロンを通過して第2の経路を、光源へと戻る。
【0071】
したがって、変調された逆反射は、
【数2】
となると考えられ、ここで、Cretroは、逆反射の成分であり、TsおよびTpは、それぞれsおよびp偏光の透過であり、Rccは、コーナーキューブの反射率である。
【0072】
通過において、透過光の位相Ψは、
【数3】
なる関係によって与えられる。ここでφ=(4π/λ)Lcosθである。
【0073】
次に、図10を参照すると、変調器のマイクロミラーの制御の論理図が示されている。ローカルレジスタが初期化101され、タイミングパルスが検出102されたとき、タイミングカウンタが開始103される。パルスが、予想の時間窓に到着104した場合、角度または角度範囲(あるいは、角度範囲または「ビン」)の割り出し106から109が行われる。次いで、明らかにされた入射角度に応答して、マイクロミラーの解放時刻111および次のパルスの予想到着時刻112が決定される。これは、有利には、ルックアップテーブル110を利用することができる。次いで、プロセスが、新たな予想窓について繰り返し113される。変調器は、予想窓内のパルスの受信に繰り返し失敗する場合には、終了105でき、あるいは他の適切な動作をとることができる。
【0074】
次に、図11を参照すると、上述のシステムのさらなる増強において、2方向(二重)通信に対応するための方法、すなわちインタロゲータから変調装置へとデータを伝送すると同時に、変調装置からインタロゲータへとデータを伝送するための能力が提案される。この方法は、連続するパルス間の時間の変化がデータをエンコードするために使用されるタイムシフトキーイング(TSK)として知られる技法を使用する。
【0075】
上述のシステムにおいて、インタロゲータのレーザが、規則的な時間間隔の一連のパルスを送信する。一実施形態においては、パルスは、長さが7nsであって、200kHzの繰り返し速度で発せられる(5マイクロ秒ごとに1パルス)。変調装置は、各パルスの到着を記録する光検出器を備える。
【0076】
変調装置は、パルス間の時間の長さを知り、この情報を各パルスの到着時に正しい透過率(「1」については高い透過率、「0」については低い透過率)をもたらすようにMEOMS変調器を設定するために使用する。反射されたパルスが、インタロゲータに位置する光検出器によって受信される。変調器は、インタロゲータとの通信のためにオンオフキーイング(OOK)を使用する。すなわち、インタロゲータによって受信される信号が、パルスのピーク高さに関して2値に符号化された一様な間隔のパルス列を含む。変調器の透過率は、典型的には100ns以上の時間的尺度にて変化する。
【0077】
しかしながら、本発明者らは、変調装置におけるパルス到着時刻の測定を、インタロゲータから変調装置へとデータを伝送する手段として使用できることに気が付いた。情報を、パルス114間の時間の長さを変化させることによるタイムシフトキーイング(TSK)を使用することによって送信することができる。
【0078】
第1の実施形態においては、パルス間の間隔の変化が、各パルスが依然として変調器の動作の正しい「時間窓」に到着して、正しく「1」についての高い透過率および「0」についての低い透過率を見るように、充分に小さくされる。このためには、ダウンリンク信号(インタロゲータから変調装置への信号)の時間シフトが100ns未満でなければならないと考えられる。変調器が、OOKを使用して信号を変調し、インタロゲータから受信された信号に与えられていたタイムシフトキーイングに依存したパルスタイミングの特徴を有するオン−オフのパルス列115を生成する。このやり方で、両方向について同時にデータ伝送を行うことができる。
【0079】
次に図12aおよび図12bを参照すると、第2の実施形態においては、変調装置による検出がより容易であると考えられるより大きなタイミングの変化を使用することができる。この実施形態においては、データの伝送が、タグからインタロゲータへのデータ伝送とインタロゲータからタグへのデータ伝送との間で交互する。この動作モードにおいては、インタロゲータが、タグからのデータを欲するときに等間隔の「論理1」パルスを送信し、その後に送信を停止して受信を開始するようにタグへと合図するため、パルス間の時間を変化させる。このモードでの動作において、「論理0」のインタロゲータパルスの場合は、トランスポンダにトランスポンダにおける到着角度に依存する変調の生成を生じさせ、したがってこのトランスポンダパルスは、インタロゲータへのデータの源として適さない。受信したパルスにOOK変調を確実に加えることは、現実的でない。
【0080】
単純な手法が、半二重の通信をもたらし、すなわち一度に一方向の通信のみが生じる。この構成においては、インタロゲータからのパルスが、トランスポンダによって、時間間隔Q1に入る場合に論理「1」として解釈され、時間間隔Q2に入る場合に論理「0」として解釈される。これは、インタロゲータによって発せられるパルス間の時間間隔t0、t1を変化させることに対応する。時間間隔Q1は、マイクロミラーがプルダウン位置から基板から最大の距離の位置へと移動するときの期間をカバーし、時間間隔が、マイクロミラーがこの位置に達した後の短い期間をカバーする。期間Q1におけるインタロゲータパルスの正確なタイミングは、トランスポンダからの逆反射がインタロゲータへとデータを送信するための最適なコントラストを有するように保証する較正モードによって決定される。インタロゲータからのパルスが、時間間隔Q2において到着するとき、逆反射係数は、主として変調器への入射角度に依存し、したがって逆反射信号には有用な情報は含まれない。したがって、インタロゲータがトランスポンダへとデータを通信できるが、そのようにしているとき、トランスポンダからインタロゲータへとデータを通信する能力は損なわれる。インタロゲータは、通信を終えたときに、「論理1」のパルス列を送信し、タグがこれを変調して、インタロゲータへと返すことができる。
【0081】
第3の実施形態においては、大きな時間シフトが、しかしながらトランスポンダからインタロゲータへの通信が「論理0」のパルスを送信するインタロゲータによって中断されないようなやり方で使用される。インタロゲータは、論理「1」のパルスを通常のやり方で送信する一方で、トランスポンダのマイクロミラー素子の振動の周期に正確に等しい量だけ遅延させることによって論理「0」のパルスを示す。トランスポンダは、論理「1」のパルスが検出されるときは常に通常のやり方で動作するが、論理「1」のパルスが検出できない場合は、マイクロミラーをホールドダウンシステムに拘束するために電子システムを使用する前に、マイクロミラーに第2の振動を生成させる。この場合、論理「1」のインタロゲータパルスについて生み出される変調が、論理「0」のインタロゲータパルスにも複製される。これの利点は、トランスポンダからインタロゲータへのデータストリームが、インタロゲータからトランスポンダへのデータの送信によって中断されることがない点にあるが、欠点は、データレートが低下する点にある。このような仕組みが図13に示されており、インタロゲータからの論理「1」の受信の結果として、変調器が、受信したパルスを、マイクロミラーの第1の振動の際に変調している。第1の振動の際に到着する論理「1」のパルスを検出し、トランスポンダは、ただ1回の振動の後にマイクロミラーを保持する。
【0082】
第1の振動の際の所定の時間間隔132の間に論理「1」が受信130されない場合、マイクロミラーは、第2の振動への続行を許され、第2の振動の際に到着する論理「0」を受信することができる。第2の振動の際の所定の時間間隔133の間に論理「0」が受信131される場合、それが変調され、マイクロミラーが第2の振動の完了時にのみプルダウンされる。図13は、論理「1」が受信されない場合の2つの完全な振動を示している。
【0083】
図14は、マイクロミラーの1つの振動周期の2つの半分を、第1の半分Q1がインタロゲータの論理「1」のパルスによってインタロゲートされ、第2の半分Q2がインタロゲータの論理「0」のパルスによってインタロゲートされるように使用できる方法を説明している。
【0084】
そのような通信の実施形態の1つにおいて、インタロゲータが、タグへのインタロゲーション信号の入射の角度に関する情報を割り出す「時間較正モード」を開始する。インタロゲータは、適切なデータを取得した後で、「通信モード」へと移行し、時間較正モードにおいて得たデータを通信プロセスを最適化するために使用する。「時間較正モード」において、インタロゲータは、上述した角度測定モードと同様に、隣接パルス間にいくつかの異なるタイミングを有する一連のタイミングパルスを送信する。トランスポンダの検出器が、タイミングパルスの到着時刻を検出するが、到着角度の割り出しは試みない。トランスポンダ駆動回路が、固定の時間遅延の後に変調器について解放および拘束のプロセスを開始して、後続のパルスを変調し、インタロゲータへと逆反射させる。インタロゲータの受信器が、異なる時間遅延のそれぞれについて信号強度を測定し、どの時間間隔が最強の信号をもたらすかを特定する。この間隔が、トランスポンダからの論理「1」の信号が最大の信号強度を有するようなタイミングに相当し、インタロゲータは、このパルス間のタイミングを後の通信モードにおいて使用する。この結果、通信モードにおけるパルス繰り返し速度が、トランスポンダの変調器への入射の角度の変化に従って変化することに留意されたい。
【0085】
通信モードにおいて、トランスポンダは、2つのやり方のうちの一方で、「解放および拘束」機構を動作させる。第1のやり方においては、固定の時間遅延の後で解放および拘束のプロセスを開始させ、論理「1」を示すためにパルスを変調し、論理「0」を示すために変調を行わない(あるいは、この反対)。第2のやり方においては、論理「1」を示すために標準の時間遅延にて変調を行い、論理「0」を示すために異なる時間遅延にて変調を行う。タグは、インタロゲータから到着するパルスの間隔を測定でき、そこから、タグへの入射の角度についての情報を導出することができる。したがって、変調器が論理「0」について最小の信号強度をもたらすように、最適な時間遅延を計算することができる。前者の利点は、実現が最も簡単である点にある。後者の技法の利点は、最大の角度範囲にわたって論理「1」と論理「0」との間に最大のコントラストがもたらされる点にある。
【0086】
第3の通信の実施形態においては、インタロゲータが、第2の通信の実施形態において述べたやり方と同じやり方で機能するが、さらにインタロゲータレーザが、タイムシフトキーイングを使用してトランスポンダへとメッセージを送信すると同時に、オン−オフキーイングによってトランスポンダからメッセージを受信する。
【0087】
明確な区別のために必要とされる時間シフトが200ナノ秒よりも大きい場合を検討すると、トランスポンダへのメッセージの送信にタイムシフトキーイングを使用するインタロゲータおよびインタロゲータへのメッセージの送信にタイムシフトキーイングを使用するトランスポンダによって、インタロゲータおよびトランスポンダが双方向の通信に関与できる少なくとも3つのやり方が存在する。
【0088】
さらに図14を参照し、変調周期におけるキー時間を検討する。マイクロミラーが、時刻tRにおいて解放され、最初の最大透過率が、解放時刻の時間tx後に生じる。マイクロミラーは、振動周期tcを有し、第2の最大値は、マイクロミラーがホールドダウンへと戻るときに生じる。対称ゆえ、これは解放時刻の時間tc−tx後に生じる。振動周期tcは、マイクロミラーに固定のパラメータであり、透過時間txは、角度に依存し、通信モードが開始される前の動作の較正モードによって割り出されている。
【0089】
変調器は、透過の最大の前の時間tmにおいて生じる透過の最小を有する。対称ゆえ、マイクロミラーの解放時刻の時間tc−tx+tm後に生じる第2の透過の最小が存在する。時間tmも角度にのみ依存し、時間txが較正モードから割り出される場合、例えばルックアップテーブルを使用することによって値tmを割り出すことが可能である。トランスポンダは、txのすべての異なる値についてtmの知られている値が存在するようにルックアップテーブルを有することができる。
【0090】
さらに図14を参照し、変調器がインタロゲータへと論理「1」を送信すべく先のインタロゲータパルスの時間tR後に解放され、論理「0」を送信すべく先のインタロゲータパルスの時間tR+tm後に解放されるトランスポンダを検討する。インタロゲータは、トランスポンダへと論理「1」を送信する場合には、先のインタロゲータパルスの時間tR+tx後にパルスを送信し、トランスポンダへと論理「0」を送信する場合には、先のインタロゲータパルスの時間tR+tm+tc−tx後にパルスを送信するように時間を決めている。
【0091】
トランスポンダの変調器は、論理「1」のインタロゲータパルスによってインタロゲートされた場合、論理「1」についてはマイクロミラーの解放の時間tx後にパルスを変調し、論理「0」については解放時刻に対する時間tx−tmにおいてパルスを変調する。これは、時間間隔Q1の機械的振動の第1の半分において生じ、インタロゲータパルスがトランスポンダによって論理「1」として解釈される。インタロゲータへの論理「1」の信号は、最大の逆反射であり、論理「0」の信号は、最小の逆反射である。
【0092】
インタロゲータが論理「0」のデータビットを含む場合、それは時刻tR+tm+tc−txにおいて送信される。変調器がインタロゲータへと論理「1」のパルスを送信している場合、マイクロミラーが時間tRにおいて解放され、インタロゲータパルスは、解放時刻に対する時間tc+tm−txにおいて到着する。上述のように、変調器は、最小強度の逆反射をインタロゲータの検出器へと送信する。変調器が論理「0」のパルスを送信している場合、マイクロミラーは先のインタロゲータパルスの時間tR+tm後に解放され、インタロゲータパルスは、マイクロミラーの解放の時間tc−tx後に変調器に到着する。上述のように、インタロゲータパルスが最大の透過を通過し、インタロゲータにおける論理「0」信号は最大値を有する。
【0093】
したがって、インタロゲータパルスがトランスポンダへと論理「1」を送信しているとき、トランスポンダは、論理「1」について最大強度の信号である信号を送り返し、論理「0」について最小強度の信号を送り返す。インタロゲータパルスがトランスポンダへと論理「0」を送信しているとき、トランスポンダは、論理「1」について最小強度の信号である信号を送り返し、論理「0」について最大強度の信号を送り返す。インタロゲータの検出器が、論理「0」のインタロゲータパルスを論理「1」のインタロゲータパルスから区別する時間シフトを検出し、したがって全二重モードにおいてトランスポンダへとデータを送信しているときに、インタロゲータが到着する信号を論理「1」または論理「0」として正しく解釈するように保証するアルゴリズムを単刀直入に実現できる。
【0094】
上述のタイミングが、tc、tR、tm、およびtxに依存することに注目できる。パラメータtcおよびtRは、トランスポンダの設計によって固定され、txは、通信に先立って何らかの方法で測定される。さらに、ルックアップテーブルなどの方法によって、ユーザは、設定プロセスにおいて測定されたtxの値をtmの値を割り出すために使用することができる。したがって、インタロゲータおよびトランスポンダは、すべてのパラメータを推定でき、全二重モードの通信リンクの最大の性能をもたらすことができる。
【0095】
次に、図15を参照し、トランスポンダが論理「1」について変調器を駆動し、論理「0」について変調器をホールドダウンに保つように構成されている場合の最適なタイミングを検討する。変調器が、先のインタロゲータパルスの時間tR後に解放され、インタロゲータパルスが論理「1」でエンコードされている場合には、最大の透過がもたらされるよう、時間tR+txにおいてトランスポンダに到着するように時間を決めている。インタロゲータパルスが論理「0」でエンコードされている場合には、透過のための最良の時間は、時間tR+tc−txにあり、マイクロミラーがプルダウン位置へと戻るときの最大の透過が存在する時刻に一致する。この場合、トランスポンダによって発せられる論理状態は、図14の構成によって例示される状況と対照的に、インタロゲータパルスの論理状態に左右されない。
【0096】
当然ながら、インタロゲータの動作モードは、効果的な通信を保証するため、トランスポンダの動作モード(すなわち、図14の動作モードまたは図15の動作モード)に適合していなければならない。
【0097】
このようなシステムに使用されるレーザは、タイムシフトキーイングを実現するように容易に構成することが可能である。ダイオードレーザは、短い光パルスの放射をもたらす短い電気パルスによって駆動される。パルスのエネルギーを、エルビウムをドープしたファイバ増幅器に通すことによって高める。レーザパルスのタイミングを、単に電気駆動パルスのタイミングを変えることによって変化させることができる。
【0098】
この手法の1つの応用は、変調装置へと「ハンドシェイク」メッセージを提供することにある。変調装置が、インタロゲータが認証された通信相手であるか否かを判断するために、時間シフトパルスの特定のパターンまたは符号を要求することができる。他の応用は、変調装置からのデータの流れをインタロゲータによって制御できるようにすることにある。例えば、変調装置がデータをブロックで送信する場合、インタロゲータが、各ブロックの送信をいつ開始すべきかを伝えることができる。データの流れの制御を、大気の乱れによって引き起こされるレーザ強度の変動(シンチレーション)によって生じるエラーを克服するために使用することができる。エラー補正コードまたはピーク強度の単純な測定が、データ喪失の可能性を示している場合、インタロゲータが、データの再送信を求めるべく変調装置と通信することができる。インタロゲータが、戻りの信号が特定のレベルを下回るときに、時間シフトされたパルスを送信でき、変調装置が、先のデータのブロックを速やかに再送信することができる。
【0099】
他の用途は、取得システムがより効率的にトランスポンダからの光を集めることができるよう、レーザインタロゲータがビーム位置決めシステムを最適化させているときにトランスポンダに特定のパルスのパターンを発するように指示することにある。
【0100】
さらなる用途は、変調装置の初期の較正にあると考えられる。インタロゲータが変調装置を照射し、変調装置が、自身の設定について微細な調節を実行する。インタロゲータが、最適な性能が達成されたときにその旨を伝えるべく、変調装置と通信できる。
【0101】
本明細書の教示を理解しようとする当業者にとって明らかであるとおり、本明細書に提示したあらゆる範囲および装置の意義は、求める効果を失うことなく拡張または変更が可能である。
【図面の簡単な説明】
【0102】
【図1a】本発明による典型的なマイクロミラー素子および典型的なばね構造の斜視図を示している(基板は示されていない)。
【図1b】本発明によるマイクロミラー素子および典型的なばね構造の側面図を示している。
【図1c】本発明によるマイクロミラー素子のアレイの平面図を示している。
【図2】本発明によるマイクロミラーと基板との間の離間の時間変化の概略のグラフを示している。
【図3a】垂直な入射角度について、本発明による光変調器の透過特性の概略のグラフを示している。
【図3b】60度の入射角度について、本発明による光変調器の透過特性の概略のグラフを示している。
【図4】本発明による変調器の時間に対する動的応答の概略のグラフを示している。
【図5】本発明による印加電圧を透過信号と比較する概略のグラフを示している。
【図6】本発明による第1の変調装置の概略図を示している。
【図7】本発明による第2の変調装置の概略図を示している。
【図8】逆反射器を取り入れてなる本発明による第3の変調装置の概略図を示している。
【図9a】逆反射器を取り入れてなる本発明による第4の変調装置の概略図を示している。
【図9b】逆反射器を取り入れてなる本発明による第5の変調装置の概略図を示している。
【図9c】本発明によるシステムの概略図を示している。
【図10】本発明による変調方法のフロー図を示している。
【図11】本発明に従い、タイムシフトキーイングによってエンコードされている受信パルス、および変調されて送信されるオン−オフキーイングパルスの概略のグラフを示している。
【図12a】本発明によるインタロゲータパルスのタイミングの第1の例の概略のグラフを示している。
【図12b】本発明によるインタロゲータパルスのタイミングの第2の例の概略のグラフを示している。
【図13】本発明による通信の第2の例の概略図を示している。
【図14】本発明による通信の第3の例の概略図を示している。
【図15】本発明による通信の第4の例の概略図を示している。
【技術分野】
【0001】
本発明は、光通信、特には自由空間光通信(これに限られるわけではないが)のための装置、方法、信号、および他の関連の態様、ならびにそれらを取り入れてなるシステムに関する。
【背景技術】
【0002】
自由空間光通信システムの可能性は、視線上の2点の間に広帯域のデータリンクをもたらすための手段として、広く認知されている。そのようなシステムについて、大都市地域における通信リンクの構成要素としての用途、および開いた間取りの事務所(open plan office)におけるローカルエリアネットワークの構成要素としての用途など、いくつかの用途が考えられている。
【0003】
本出願と同時に係属中である米国特許出願第10/483,738号(A.M.Scottら)が、間隔を制御することができるエタロンとエタロンを介して受信される光を再びエタロンを通って光源に向かって反射させるように構成された逆反射器とを組み合わせて使用する動的な光反射器およびインタロゲーションシステムを開示している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、一般的には光通信、特には自由空間光通信のための優れた方法、装置、および信号を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の態様によれば、二重光通信を提供する方法であって、タイムシフトキーイングによってエンコードされた信号を受信すること、およびオン−オフ信号を送信するために、受信したパルスを選択的に変調すること、を備える方法が提供される。
【0006】
変調器が、受信したパルスを選択的に透過させることができる。
【0007】
透過したパルスを、逆反射させることができる。
【0008】
さらに本発明は、通信の目的のためのシステムであって、本発明を具現化する装置の1つ以上の実例を、他のさらなる装置とともに備えるシステムに関する。
【0009】
特には、本発明のさらなる態様によれば、選択的に透過性となる素子であって、動作時に、タイムシフトキーイングによってエンコードされた入射信号の連続するパルスを選択的に変調して、オン−オフエンコードされた信号をもたらすように構成された素子、を備える光信号変調器が提供される。
【0010】
光変調器は、連続するパルスを選択的に逆反射させるように構成された逆反射器を備えることができる。
【0011】
変調器は、変調された連続するパルスを反射させるための反射器を備えることができる。
【0012】
反射器は、逆反射器であってよい。
【0013】
さらに本発明は、本発明の他の態様によって使用される信号にも向けられている。
【0014】
特には、本発明のさらなる態様によれば、オン−オフのパルスによってエンコードされた信号であって、タイムシフトキーイングによってエンコードされた第2の光信号に応答して生成された信号を備え、信号のオンパルスが、タイムシフトキーイングによってエンコードされた第2の光信号の時間シフトの特徴を呈している光通信信号が提供される。
【0015】
本発明のさらなる態様によれば、タイムシフトキーイングによってエンコードされた第1の信号と、オン−オフによってエンコードされた第2の信号とを備え、オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号の対応するパルスを時間遅延させてなる導出物であり、オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号のパルスから派生した時間シフトの特徴を呈している複合光信号が提供される。
【0016】
さらに本発明は、機械で読み取ることができる形式のコンピュータソフトウェアであって、動作時に上記装置および/または方法のすべての機能を実行するように構成されたコンピュータソフトウェアを提供する。
【0017】
当業者にとって明らかであるとおり、好ましい特徴を適宜に組み合わせることができ、本発明の任意の態様に組み合わせることができる。
【0018】
次に、本発明をどのように実行に移すことができるかを示すため、本発明の実施形態を、以下で添付の図面を参照しつつ、あくまで例として説明する。
【発明を実施するための最良の形態】
【0019】
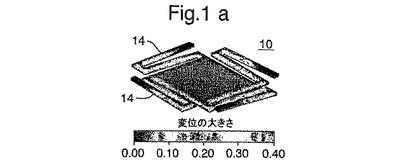
図1aから図1cを参照すると、(1つ以上の)光ビームの強度を制御するために使用できる変調器が、単一の素子10にもとづいており、あるいは1つ以上のマイクロミラー10が基板13の上方に支持12されているMOEMSミラー構造のアレイ11にもとづいている。この構成を、基板(例えば、シリコン)が光学的に透過性である波長の透過に使用することができ、実質的により広い範囲の波長の反射に使用することができる。
【0020】
個々の素子は、1ミクロン未満から数ミクロンの間の間隔にて基板13の上方に支持されたマイクロミラー10を有する。マイクロミラーは、基板とマイクロミラーとの間に電圧が加えられたときに、静電気力によってマイクロミラーが平衡位置(電圧が加えられていない)から基板に向かって引かれるように、ばね14によって支持されている。
【0021】
電圧駆動の静電気デバイスにおいては、所与のしきい値未満であれば、静電気力がデバイスの変位に起因する機械的な復帰力と平衡して、デバイスが安定な平衡状態となる。このしきい値を超えると、静電気力が復帰力を超え、マイクロミラーが基板に向かって制御不能に移動する(一般に「ラッチ」、「プルイン」、または「プルダウン」として知られている状態)ため、デバイスは不安定になる。しきい値を超える電圧を加えることで、所与の駆動電圧においてより大きな範囲(典型的には、しきい値未満の仕組みに対して約3倍)でミラーを動かすことができる。
【0022】
マイクロミラーは、任意の平面形状であってよいが、実質的に平坦かつ基板に平行でなくてはならない。マイクロミラーは、有利には正方形であってよいが、他の形状であってもよい。アレイにおいて密に密集させることができる形状(例えば、三角形、長方形、および六角形)が、特に好ましい。
【0023】
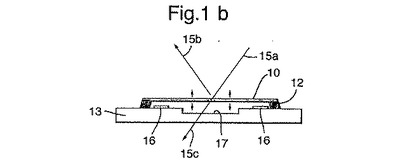
このデバイスへと光15aが導かれると、光の一部は反射15bされ、一部は基板へと透過15cして、反対側から出る(基板が透過性であるような波長の場合)。支持ミラーによる反射および透過光が、基板による反射および透過光と干渉し、したがってデバイスの実際の透過および反射は、デバイスへの光の入射の角度、支持ミラーと基板との間の間隔、ならびに支持マイクロミラーの厚さ、マイクロミラーの素材の屈折率、および入射光の波長などといったシステムの他の所定の特性に応じて、高低の値の間でさまざまである。
【0024】
動作時、マイクロミラーと基板との間の間隔が変化するにつれ、透過が高低の値の間で変化し、すなわち入射光の変調手段がもたらされる。変調は、透過または反射モードにて機能することができる。マイクロミラーが、典型的には厚さが1ミクロン未満であって、シリコンが高度に吸収性である可視の領域においても半透明であり、したがってシリコンから製作される変調器を、可視の帯域において反射に使用できることに留意されたい。当業者にとって明らかであると考えられるが、例えば二酸化シリコンまたはチッ化シリコンなど、シリコン以外の材料も使用可能である。この場合、基板は、透明でなければならない(例えば、二酸化シリコンまたはチッ化シリコンであってよい)と考えられ、マイクロミラーおよび底層は、二酸化シリコンまたはチッ化シリコン、あるいはシリコンの薄い層または材料の組み合わせであると考えられる。
【0025】
変調器の透過および反射特性を、本明細書の式2に提示されるように、ファブリーペローエタロンによる透過および反射についての既知の式を使用して、説明することができる。反射および透過光が、位相のシフトならびに振幅の変化を受けることに、留意されたい。これを、光ビームの位相の変調が求められるデバイスにおいて利用することも可能である。
【0026】
マイクロミラーは、ミラーを密にタイル状に並べることによって広い領域を覆うアレイとして製造される場合、空間光変調器(SLM)となる。SLMにおいて、マイクロミラーを、個々に制御することができ、グループにて制御することができ、あるいはすべてをまとめて制御することができる。好ましくは、マイクロミラーアレイの素子が、コヒーレントに動くように構成または操作され、すなわち得られる光の位相がアレイの全体にわたって一様であるように、同じタイミングおよび振幅で同期して動くように構成され、多数の(おそらくはすべての)マイクロミラーのグループにおいて、デバイスへと入射する波面の各部に実質的に一様な効果をもたらすために、素子が一緒に動く。これは、変調された光の回折特性が、広がった波面によって決定され、単一のマイクロミラー素子による回折によって決定されるわけではないという利益を有する。小さなミラーからなるアレイは、より大きなデバイスと比べたとき、ミラーの平坦性を良好に保ちつつ、高い速度の達成を可能にする。
【0027】
マイクロミラーはそれぞれ、2つの電圧状態を使用して制御されたときのミラーの位置を確証できる2つの安定位置の間で操作される。その第1は、ミラーと基板との間に電圧が加えられていない(あるいは、所与のしきい値を下回る電圧が加えられている)ときに、マイクロミラー10が基板の上方に動かずに支持されている「平衡位置」である。電圧が加えられない実施形態においては、支持ばね14の伸びは存在しない。別の実施形態においては、変調器の状態が変化するときに電池を充電することによって変調器の全体としての電力消費を低減するために、しきい値未満の電圧が加えられる。ミラーは、静電気力と機械的な力とが平衡するより下方の平衡位置(元の平衡位置(電圧が加えられていない)と基板との間)に位置することになる。
【0028】
第2の位置は、しきい値を超える電圧が加えられ、マイクロミラーが基板に向かって強く引き下げられた「プルダウン」位置である。
【0029】
絶縁ストッパ(例えば、ボスまたは他の隆起した電気絶縁性のフィーチャ)16を、基板とマイクロミラーとの間に設けることができ、したがって電圧がしきい値を超えたとき、ミラーがストッパへと引き寄せられて当接するが、それ以上基板に向かって引き寄せられることはない。したがって、このようなプルダウンストッパによれば、望ましくないマイクロミラーと基板との間の電気的接触を防止することができる。そのような電気的接触は、短絡および電気的損傷につながりかねない。さらに、1つ以上の終端ストッパを取り入れることで、プルダウン位置にあるときのミラーと基板との間に、所定のオフセットを定めることができる。さらに、機械的な減衰がもたらされ、静止までの時間が短くなる。有利なことに、このオフセットを、幅広い角度範囲にわたって透過が少ない状態に対応するように、特定的に設計することができる。好ましくは、終端ストッパは、機械的な接触の付着エネルギーに打ち勝つべく追加のエネルギーをもたらすために、プルダウン位置のミラーにわずかな湾曲をもたらすことができるように構成される。考えられる一実施形態においては、実質的に正方形または矩形のミラーが、ミラーのそれぞれの角またはその付近、ならびにミラーの中央またはその付近に、終端ストッパを取り入れている。
【0030】
ミラーは、MEMSプロセス、好ましくは多結晶シリコン表面マイクロマシニングプロセスを使用して実現できる。好ましくは、終端ストッパが、基板上の1つ以上のブシュ16(絶縁されたアイランド)およびミラーの下方のくぼみ17を使用して実現される。さらに好ましくは、ブシュを、チッ化シリコンおよび/または多結晶シリコンで構成でき、ミラーおよびくぼみを、多結晶シリコンで構成できる。
【0031】
小さな電圧が加えられたとき、マイクロミラーは、平衡位置からわずかな量だけ移動する。電圧が特定のしきい値を超えると、この移動が不安定になり、マイクロミラーが「プルダウン位置」へとぱたりと落ち込む(snap down)。アナログの制御電圧を加えて、マイクロミラーを基板からの任意の距離へと動かすことは、電圧について微細な制御が必要であり、アレイ内のミラー間で経路長が相違するがために電圧降下に左右されやすいことから、困難である。通常または単純な制御システムにおいては、アナログ制御のもとでのマイクロミラーの移動は、平衡位置とプルダウン位置との間の道程のうちの約3分の1に限られ、その後にマイクロミラーは、勢いよく完全なプルダウン位置へと移動してしまう。実際には、本発明においては、このスナップダウン位置が好ましく使用され、2つの不連続な電圧状態を使用してマイクロミラーが平衡位置とプルダウン位置との間で好ましく切り替えられる。
【0032】
マイクロミラーに印加電圧信号からもたらされる力が加えられるとき、その運動は、ミラーの機械的な共振周波数および大気の減衰効果によって決定される。ミラーならびにミラーのばね系が、通常の市販のソフトウェアツールで割り出すことができる共振周波数にて、古典的な共振器として挙動する。所与の構成における正確な共振周波数は、ばねの強さおよびミラーの質量ならびに減衰の程度に依存する。例えば、2つの直線ばねおよびサイズが25ミクロン×25ミクロンであるミラーからなる典型的な構造においては、この共振周波数は、300kHz程度であり得る。より大きなミラーは、これよりも大幅に低い共振周波数を有し得る。より剛なばねを備えるデバイスは、これよりも大幅に高い共振周波数を有し得る。
【0033】
大気圧および数十ミリバールまでの圧力においては、空気がマイクロミラーの運動を大きく減衰させ、状態間の変化に要する時間が、この減衰プロセスによって支配される。数ミリバール以下の圧力においては、マイクロミラーは、高Q共振器として挙動し、すなわち強い振動の形式で運動する。この振動は、ミラーが引き下げられて、プルダウンストッパに当接して保持されるときには、プルダウンストッパが機械的な減衰をもたらすがゆえに生じないが、マイクロミラーが印加電圧をゼロ(または、プルダウン位置への保持に必要なしきい値を下回る電圧)へと切り替えることによってプルダウン位置から解放されるときに明白である。
【0034】
マイクロミラーが真空中で解放される場合、マイクロミラーは、平衡位置に向かって跳ね上がり、次いでこの位置を中心にして、各周期の後にプルダウン位置の近くへと戻るように振動する。これに対する減衰は、おそらくはきわめて弱く、したがって運動が、きわめて予測可能な形式で継続し、振幅および周波数は、正確な真空の程度や最初にマイクロミラーを保持するために使用されていた絶対的な電圧に比較的無関係である。
【0035】
基板の上方のマイクロミラーの変位は、
x(t)=x0−(x0−x1)cos(Ωt)exp(−βt) (1)
によって与えられ、
ここでxは、基板からマイクロミラーまでの距離であり、x0は、平衡位置であり、x1は、プルダウン位置であり、tは、マイクロミラーの解放からの時間であり、Ωは、共振周波数であり、βは、減衰係数である。
【0036】
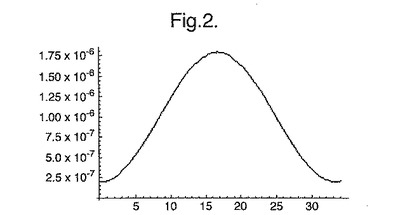
低い圧力においては、振動の減衰係数が小さく、したがって振動がオーバーシュートを呈するため、例えばプレートに必要とされる最大の離間(マイクロミラーと基板との間の離間)が1.5ミクロンである場合、平衡位置を0.75ミクロンの付近となるように設計し、必要とされる最大の離間を達成するためにオーバーシュートに頼ることが可能である。プレートの離間の全範囲が、エタロンが基板からの最小の離間から最大の離間まで移動する第1の半サイクルにおいて対処される。半周期と全周期との間の或る時刻の後で、基板の電圧が再び印加され、プレートが振動を続けているため、再び基板に向かって移動し、マイクロミラーが印加電界によって再び拘束され、最初の「プルダウン」位置へと復帰する。1周期における典型的なプレートの離間は、時間に対して、図2に示したとおりであり、水平軸が時間を(任意単位で)示し、垂直軸がマイクロミラーの基板からの隔たりを示している。この図示の例では、平衡位置は1ミクロンである。代案として、マイクロミラーを所定の回数(1、2、または3以上)だけ振動させ、その後に電圧を再印加して、マイクロミラーをプルダウン位置に再拘束することも可能である。
【0037】
このやり方でマイクロミラーの解放のタイミングを制御することによって、運動の全範囲にわたってミラー位置の制御を、細かな電圧の制御にではなく、タイミング制御に依存して行うことができる。そのような細かいタイミングの制御は、高速なデジタル電子機器(例えば、0.35ミクロンのCMOS)を使用して達成することができる。
【0038】
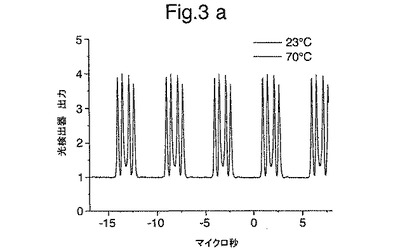
次に、図3aおよび図3bを参照すると、ファブリーペローエタロンにおける透過および反射の式(式2が透過を示している)を、時間とともに変化するマイクロミラーと基板との間の間隔の式に組み合わせて使用して、エタロンミラーの間隔が図3aおよび図3bに示すような時間依存に従うときのマイクロミラーの透過の時間変化を割り出すことができる。図3aが、垂直入射についての実験による透過のデータを示す一方で、図3bは、60度の入射角度の場合の該当のデータを示している。やはり、水平軸が、時間を示す一方で、垂直軸は、マイクロミラーの光の透過を示している。
【0039】
図示の第1の例においては、エタロンの面に垂直に入射する光について、マイクロミラーが上昇して基板から離れるときに2つの透過のピークが生じ、これに対応する2つのピークが、マイクロミラーが基板に向かって引き戻されるときに生じる。第2の例は、60度の場合には、マイクロミラーが最大変位へと移動するときに透過のピークが1つ存在し、プルダウン位置へと戻るときに第2のピークが存在することを示している。しかしながら、ピークのタイミングおよび数は、光ビームの入射の角度とともに変化し、したがってエタロンのタイミングを最適化するためには、入射の角度を知ることが強く望まれる。それぞれのグラフは、2つの温度(約20度および70度)における透過特性を示しており、これら2つの動作値の間に良好な度合いの一貫性が見られている。
【0040】
あるいは、振動パターンの測定を、変調器への光の入射の角度を割り出すために使用することができる(実際には、cos(θ)についての測定(θは入射の角度)がもたらされる)。
【0041】
このデバイスを、検出器システムが変調器によって生み出される動的な変調を解像できるのであれば、連続波(CW)レーザ(または、予測可能なパルスパターンを有するレーザ)を制御するために使用することができる(図9bおよび図9c)。あるいは、パルスの継続時間がマイクロミラーの振動の周期よりも有意に短いならば、繰り返しパルスレーザを制御するために使用することができる(図9a)。この場合、インタロゲータシステム(新たな図10または図9c)の検出器は、必ずしも変調器の動的な挙動を解像できる必要はなく、インタロゲータの個々のパルスを解像できればよい。入射パルスの到着時刻を検出する検出器からなるタイミング回路を使用することができ、入射パルスのタイミングが、次のパルスの正確な到着時刻を予測するために使用される。マイクロミラーをプルダウン位置に保持し、レーザパルスの到着予定時刻においてマイクロミラーシステムがパルスに所望の量の変調を加えるための位置にあるように、計算された時刻に解放することができる。
【0042】
次に図4を参照すると、エタロンの動的な応答が、時間(クロックパルス)に対して示されている。最も上部の軌跡41は、入射するレーザパルスを示しており(任意単位)、中央の軌跡42は、マイクロミラーへと加えられる電圧(プルダウン電圧が、「2.5×10−6」に対応し、0Vが、「2×10−6」に対応している)を示しており、最も下方の軌跡43は、基板とMEOMSミラーとの間の間隔を示している(目盛りはメートル)。
【0043】
レーザパルスが、最大変位の付近において到着した場合(第1および第3のパルス)、透過が最大であり、論理1が伝達される。レーザパルスが、ミラーが基板に近いときに到着した場合(第2のパルス)、透過は最小であり、論理0(ゼロ)が伝達される。
【0044】
次に図5を参照すると、軌跡51が、マイクロミラーの駆動電圧を示しており、軌跡52、53が、2つのレーザパルスの透過パワーを示している場合について、実験データを示している。マイクロミラーの解放と第1のパルスの到着との間の遅延は、透過が大52であるようにされている。マイクロミラーの解放と第2のパルスの到着との間の遅延は、透過が小52であるようにされている。
【0045】
変調器を、逆反射器、検出器、および駆動用電子機器と一緒に使用して、図9cに示されているように遠方のインタロゲータシステムと通信できるトランスポンダを形成することができる。右側に、トランスポンダが図示される一方で、左側には、コリメータレンズ98を備えたレーザ95および集光レンズ96を備えた検出器97が示されている。トランスポンダが充分に遠く、トランスポンダからの光が回折および拡散して、レーザインタロゲータへと戻るだけでなく、広がって受信光学系にも進入する場合、検出器が、どの光がトランスポンダから反射されて戻されたのかを検出する。この場合、インタロゲータが、遠方のトランスポンダによって生み出された変調を検出する。
【0046】
受信されるパルスに加えられる変調は、振幅変調、または移動変調、あるいは両者であってよい。
【0047】
真にCWであるインタロゲータにおいては、トランスポンダが、必ずしも検出器を必要とせず、単純にインタロゲータによって検出される変調パターンを送り出すことができる。あるいは、インタロゲータの光の存在を検出するために、検出器を使用してもよい。擬似CW変調インタロゲータにおいては、トランスポンダの検出器が、インタロゲータのビーム内のタイミング情報(例えば、強度の急上昇または強度の中断)を使用し、変調をタイミング情報に同期させることができる。一連の短いパルスを生成するインタロゲータの場合には、トランスポンダが、1つのパルスの到着を検出し、このタイミング情報を、次のパルスの変調を生成するための最適なタイミングを割り出すために使用することができる。最適な解放時刻を、例えば1つのパルスの到着を検出し、到着の角度についての情報を集め、最適な遅延を割り出すべくルックアップテーブルを使用することによって決定できる。例として、システムを、パルスの透過または反射を最大値と最小値との間で切り替えるために使用することができ、もしくはパルスの振幅を、すべてが同じ強度になるように、あるいは何らかのやり方で符号化されるように、制御するために使用することができる。これを、振動の最初の半周期において行うことができる。また、これを、機械的振動の際の任意の予測可能な点において行うことも可能であり、あるいはマイクロミラーを2回振動させ、第2の振動においてパルスの変調を達成することも可能である(全二重の通信を達成したい場合に重要である)。
【0048】
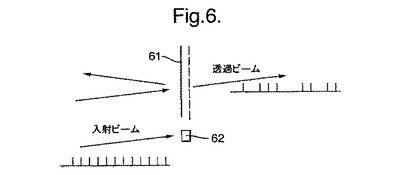
次に図6を参照すると、上述のように、1つのパルスの到着を検出し、この情報を使用して、次のパルスを変調すべくマイクロミラーを解放することができるよう、変調器61に検出器62を組み合わせることができる。
【0049】
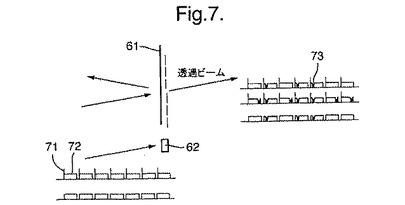
次に図7を参照すると、上述の仕組みの変種において、遠方のレーザ発光体を、繰り返しの短パルスレーザシステムを長パルスまたは連続波のレーザシステムに組み合わせて構成することができる。この構成において、短パルスを、タイミングパルスとして使用することが可能である。変調器が、タイミングのための短パルスを使用し、光の連続波部分または長パルス部分に変調を加えることができる。したがって、変調されるビームを、例えばタイミングパルスに対する変調の時間シフトによってエンコードすることができる。インタロゲータが、充分に高速な検出器または敏感な検出器を有する場合には、インタロゲータのビームにタイミング情報を持たせる必要、およびトランスポンダに検出器を持たせる必要は、必ずしもないかもしれない。インタロゲータの検出器が、時間分解された変調を検出でき、あるいは平均の逆反射パワーの小さくかつ高速な変化を検出できる。
【0050】
図7は、タイミングパルス71と擬似CWレーザパルス72とを含むレーザパルスによる変調器61のインタロゲーションを示している。擬似CW部分が変調73されている。各パルスを変調するか、あるいは変調しないかによって、ビームをエンコードすることができ、あるいは変調または時間遅延の変調の適用を選択することができる。最初のタイミングパルスを使用することができ、あるいは矩形波インタロゲーションパルスの立ち上がり縁を使用することができる(左下の例を参照)。変調されたパルスの例は、右の中ほどに示されている。
【0051】
次に図8を参照すると、変調器61を逆反射器81に組み合わせ、変調逆反射器として機能させることができる。変調器のマイクロミラー素子は、例えば差し渡しが25μm程度であってよく、逆反射器の素子は、大幅に大きくてよく、例えば差し渡しが5〜15mmであってよい。個々のマイクロミラーがコヒーレントに動く場合、変調器を通過する光のダイバージェンスは、アレイの全体サイズによって決定され、単一のマイクロミラーによる回折に起因するダイバージェンスによっては決定されない。比較的大きな逆反射素子を使用することは、きわめて平行な反射光ビームを形成する上で役に立つ。したがって、変調逆反射デバイスを、パルスのパターン82を送信するレーザインタロゲータによって照射することができる。変調逆反射デバイスが、到着するパルスを変調し、パルス83をインタロゲータへと逆反射させる。ここで、インタロゲータのパルスは、基本的にパルス状であり、逆反射される光は、完全に逆反射され、あるいは完全に減衰させられる。したがって、インタロゲータは、逆反射されたパルスを受信して、一連の「1」および「0」としてデコードできる。この変調器の構成は、パルスを検出するために検出器62を使用することができ、1つのパルスの検出を使用して次のパルスの到着時刻を予測し、次のパルスを変調すべくマイクロミラーの解放時刻を決定するために、制御ユニット84を使用することができる。この場合、逆反射器への到着の角度が、管理されていなければならず、あるいは逆反射システムが、マイクロミラーの最適な解放のタイミングを決定するために、何らかの形式の角度検出を使用することができる。
【0052】
あるいは、インタロゲータおよび逆反射変調器システムの組み合わせのシステムが、性能を最適化することができる。変調器を、固定の時間遅延で動作させることができ、インタロゲータが、到着の角度を決定し、最適な変調が生じるようにパルスのタイミングを変化させることができる。
【0053】
最大または最小の信号を生み出すための変調器の最適なタイミングは、角度に依存する。上述のシステムが、任意の角度で入射する光について機能すべき場合には、最適なミラーのタイミングが入射光の入射角度に依存して決まるため、検出器が、好ましくは、到着の角度を割り出す手段を取り入れるべきである。あるいは、インタロゲータが、タグへの入射の角度を推定する手段を備え、最大の変調が保証されるようにタグへのパルスのタイミングを変化させてもよい。
【0054】
次に、図9aおよび図9bを参照すると、選択肢として、変調逆反射デバイスを、一式の短いタイミングパルスをより強度の低い擬似連続のパルスとともに送信できる(あるいは、送信しなくてもよい)インタロゲータとともに使用することができる。変調逆反射デバイスが、低強度の擬似連続のパルスを、タイミングパルスの後の或る制御された時点において変調できる。デバイスは、このパワーをインタロゲータへと逆反射させる。この構成において、インタロゲータのパルスは、擬似CW周期での変調を含み、逆反射される光は、インタロゲータのパルス状の要素に同期されるが、変調は、インタロゲータの光の擬似CW領域へと加えられる。
【0055】
インタロゲータによって受信される正確な変調パターンは、逆反射デバイスへの到着の角度に依存するが、インタロゲータが、特定のパターンを認識できてもよく、そこから、タイミングパルスに対する最適な時間遅延、および所望であれば入射の角度を決定することができる。
【0056】
擬似連続の波形およびそのタイミングパルスに対するタイミングを測定することによって、インタロゲータは、波形へと加えられた時間シフトの大きさを割り出すことができ、これを1片のデータとして解釈することができる。この後者の手法の利点は、変調装置に角度検出器を取り入れる必要がなく、変調装置を、より小型にでき、より安価に製造できる点にある。
【0057】
次に、図9bを参照すると、インタロゲータが、連続的な光91を生み出すことができ、逆反射される光を、インタロゲータに関連付けられた同期を持たずに、変調92、93することが可能である。
【0058】
次に、図9cを参照すると、全体としてのシステムが、1つ以上の上述のような変調装置を、送信器95と検出器97に組み合わせられた受信テレスコープ96とを備えるインタロゲータレーザシステムとともに備える。
【0059】
第1の角度測定モードにおいて、インタロゲータが、連続波ビームを送信し、トランスポンダから逆反射される光を測定する。トランスポンダは、おそらくはインタロゲータからのいかなる合図も使用せず、「解放および拘束」モードで動作する。「解放および拘束」の各サイクルにおいて、逆反射検出器は、図3に示した信号に定性的に類似した信号、すなわち一連の比較的はっきりした最大値および最小値を含む信号を検出する。いくつかのパルスにわたって測定を行い、積分を行うことで、検出器は、良好に解像された曲線を蓄積することができる。それらの曲線のピークのタイミングは、中央のピークまたは谷の深さまたは高さ同様、トランスポンダへの入射の角度の余弦の関数であり、データについて適切なフィッティングおよび処理を行うことによって、変調器への入射の角度の余弦を割り出すことが可能である。
【0060】
角度測定モードの第2の実施形態においては、インタロゲータが、一連のパルスを送信し、トランスポンダから逆反射される光を測定する。トランスポンダは、「解放および拘束」モードで動作し、インタロゲータからのパルスの検出の後に、所定の時間だけ遅延させて解放時間を開始させる。「解放および拘束」の各サイクルにおいて、逆反射検出器は、トランスポンダからのパルスを検出し、各パルスの振幅を記録できる。インタロゲータが、パルスNとパルスN+1との間の時間遅延が、パルスN−1とパルスNとの間の時間遅延にいくらかの増分Dtを加えた値に等しくなるように、パルス間のタイミングをゆっくりと変化させる場合、結果として、各パルスが、変調器の応答曲線の異なる部分によって変調されることになり、数パルスの期間にわたり、インタロゲータは、変調器の透過プロファイルの全体をストロボ状に採取することになる。このデータによって、インタロゲータは、トランスポンダへの入射の角度を推定することができる。
【0061】
第1の通信モードにおいて、インタロゲータは、変調装置のインタロゲートのために、パルスの列を使用する。変調装置が、到着する信号のタイミングおよび角度検出器からの角度を検出する。過去のパルス列の時間履歴から、変調装置は、次のパルスの到着時刻を予測することができる。変調装置は、内部のクロックおよびルックアップテーブルを使用し、次のパルスが到着するときに変調器によってもたらされる透過が最大または最小のとなるような時点で、マイクロミラーアレイを解放する。あるいは、最小の透過を、単にマイクロミラーをプルダウン位置に保持することによって得てもよい。受信器が、パルスを検出し、論理1であるか、あるいは論理0であるかを判断する。このモードは、最大の範囲にわたって性能をもたらす。
【0062】
第2の通信モードにおいては、インタロゲータが、一連のタイミングパルス(あるいは、タイミングの目的に使用できる鋭い縁を有する一連の矩形パルス)を送信できる(送信しなくてもよい)。これを、インタロゲーション用の擬似連続パワーに重ねることができる。変調装置は、タイミングパルスを検出するが、到着角度の割り出しは試みない。変調装置は、2つのやり方のうちの一方で、「解放および拘束」機構を動作させる。すなわち、論理「1」を示すためにパルスを変調し、論理「0」を示すために変調を行わない(あるいは、この反対)。あるいは、2つの所定の時間遅延のうちの一方において、論理「1」または論理「0」を示すべく変調を行う。前者の利点は、低帯域の検出器で、変調が加えられたか否かを示す小さな透過の変化を検出できる点にある。後者の技法の利点は、論理「1」および論理「0」の検出が能動的に示される点にある。
【0063】
あるいは、真のCWインタロゲーション91において、変調の存在92または非存在93を検出することができ、あるいはインタロゲータが、信号積分時間が変調信号の高周波積分に比べて遅い場合に予想される信号強度の小さな変化を検出できるのであれば、タイムキーシフト変調の存在を検出することができる。
【0064】
インタロゲータは、タイミングパルスおよびアナログの戻りを受信する。到着の角度にかかわらず、逆反射されたタイミングパルスを参照することによって、アナログの戻りのタイミングを認識することができる。
【0065】
遠隔角度検出モードにおいて、目標は、遠方の変調装置への入射の角度を割り出すことにある。これは、例えば、変調装置からの信号を最大にするためにインタロゲータがどの方向に移動すべきかを判断するために、あるいは変調器の向きを割り出すために、有用であると考えられる。インタロゲータが、擬似CWビームで変調器を照らし、マイクロミラーが解放および拘束されるときの時間分解された逆反射を検出する。検出された信号をテンプレートに照らし合わせることによって、プロセッサは、特定の入射角度に一致するテンプレートを特定できる。
【0066】
強度安定化モードにおいて、目標は、(例えばシンチレーションに起因して)入力ビームが繰り返し速度に比べて遅い時間軸において変動しているときに、出力ビームの平均を安定させることにある。入射パワーが、特定の程度の減衰をもたらすように同期させられた変調器に入射する。入射パワーに変動が存在する場合、減衰を調節して、全体としてのレーザパワーが一定の値に保たれるように保証するため、マイクロミラーの解放時刻に小さなタイミングの変化を加えることができる。到着するビームが、例えば論理「1」および論理「0」のパルス列であって、シンチレーションによって生じるよりゆっくりとした強度の変動を有する場合、システムを、このゆっくりと変化する変動が安定化によって取り除かれるが、より高速な論理「1」と論理「0」除との間の変化は残されて、後に検出できるように、変調することができる。この手法を、自由空間光レーザ通信システムにおいて信号を検出するために、大きなダイナミックレンジの検出器の代わりに用いることができる。
【0067】
空間光変調モードにおいては、アレイ上のマイクロミラーのグループが、ビームを横切る空間パターンを生み出すように解放される。これを、例えば信号処理およびビームの操縦など、他の空間光変調器が現在使用されているさまざまな用途に使用することができる。
【0068】
ビーム操縦モードにおいて、個々の素子のそれぞれの解放時刻が制御される場合、マイクロミラーアレイの各素子の位相を効果的に制御することが可能である。各素子の位相を制御することによって、伝搬方向を制御することができる。したがって、これを、それぞれのマイクロミラーを個々に制御できる場合に、レーザビームを所定の方向に操縦するために使用することができる。
【0069】
ファブリーペローエタロンの特徴をさらに詳しく検討すると、MOEMSミラー−基板変調器の透過を、反射率がシリコンへと適用されるフレネル反射の式によって決定される2つの反射面を有する単純な構造としてのシステムを検討することによってモデル化できる。ファブリーペローエタロンの透過は、
【数1】
によって与えられ、ここでφ=(4π/λ)Lcosθである。ここで、プレート間の間隔が、Lによって与えられ、入射の角度が、θによって与えられ、波長は、λである。各表面の反射率が、Rによって与えられ、透過が、Tによって与えられる。
【0070】
変調器およびコーナーキューブ逆反射器の組み合わせを考えると、反射される光が、2つの偏光成分の組み合わせによって決定される点が、注目される。インタロゲータが円偏光または非偏光である場合を考えると、到着の角度にかかわらず、2つの偏光の等しい強度が存在する。入射光が、等しい量の「s」偏光(Eベクトルが表面に平行)および「p」偏光(Eベクトルが透過および反射ビームの平面内にある)の光を有する。それぞれの偏光が異なる量だけ透過し、部分偏光のビームが、コーナーキューブ逆反射器へと進入する。この偏光が、逆反射器の性質に応じて、さまざまな量で解消される。コーナーキューブ逆反射器が金属でコートされている場合には、偏光特性は保存される。コーナーキューブ逆反射器が誘電体に拠る場合には、特定の角度について偏光が大きく解消される。後者の場合、近似として、ビームの偏光がコーナーキューブによって完全に解消されると仮定される。偏光が解消されたビームが、エタロンを通過して第2の経路を、光源へと戻る。
【0071】
したがって、変調された逆反射は、
【数2】
となると考えられ、ここで、Cretroは、逆反射の成分であり、TsおよびTpは、それぞれsおよびp偏光の透過であり、Rccは、コーナーキューブの反射率である。
【0072】
通過において、透過光の位相Ψは、
【数3】
なる関係によって与えられる。ここでφ=(4π/λ)Lcosθである。
【0073】
次に、図10を参照すると、変調器のマイクロミラーの制御の論理図が示されている。ローカルレジスタが初期化101され、タイミングパルスが検出102されたとき、タイミングカウンタが開始103される。パルスが、予想の時間窓に到着104した場合、角度または角度範囲(あるいは、角度範囲または「ビン」)の割り出し106から109が行われる。次いで、明らかにされた入射角度に応答して、マイクロミラーの解放時刻111および次のパルスの予想到着時刻112が決定される。これは、有利には、ルックアップテーブル110を利用することができる。次いで、プロセスが、新たな予想窓について繰り返し113される。変調器は、予想窓内のパルスの受信に繰り返し失敗する場合には、終了105でき、あるいは他の適切な動作をとることができる。
【0074】
次に、図11を参照すると、上述のシステムのさらなる増強において、2方向(二重)通信に対応するための方法、すなわちインタロゲータから変調装置へとデータを伝送すると同時に、変調装置からインタロゲータへとデータを伝送するための能力が提案される。この方法は、連続するパルス間の時間の変化がデータをエンコードするために使用されるタイムシフトキーイング(TSK)として知られる技法を使用する。
【0075】
上述のシステムにおいて、インタロゲータのレーザが、規則的な時間間隔の一連のパルスを送信する。一実施形態においては、パルスは、長さが7nsであって、200kHzの繰り返し速度で発せられる(5マイクロ秒ごとに1パルス)。変調装置は、各パルスの到着を記録する光検出器を備える。
【0076】
変調装置は、パルス間の時間の長さを知り、この情報を各パルスの到着時に正しい透過率(「1」については高い透過率、「0」については低い透過率)をもたらすようにMEOMS変調器を設定するために使用する。反射されたパルスが、インタロゲータに位置する光検出器によって受信される。変調器は、インタロゲータとの通信のためにオンオフキーイング(OOK)を使用する。すなわち、インタロゲータによって受信される信号が、パルスのピーク高さに関して2値に符号化された一様な間隔のパルス列を含む。変調器の透過率は、典型的には100ns以上の時間的尺度にて変化する。
【0077】
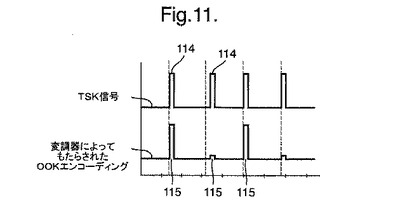
しかしながら、本発明者らは、変調装置におけるパルス到着時刻の測定を、インタロゲータから変調装置へとデータを伝送する手段として使用できることに気が付いた。情報を、パルス114間の時間の長さを変化させることによるタイムシフトキーイング(TSK)を使用することによって送信することができる。
【0078】
第1の実施形態においては、パルス間の間隔の変化が、各パルスが依然として変調器の動作の正しい「時間窓」に到着して、正しく「1」についての高い透過率および「0」についての低い透過率を見るように、充分に小さくされる。このためには、ダウンリンク信号(インタロゲータから変調装置への信号)の時間シフトが100ns未満でなければならないと考えられる。変調器が、OOKを使用して信号を変調し、インタロゲータから受信された信号に与えられていたタイムシフトキーイングに依存したパルスタイミングの特徴を有するオン−オフのパルス列115を生成する。このやり方で、両方向について同時にデータ伝送を行うことができる。
【0079】
次に図12aおよび図12bを参照すると、第2の実施形態においては、変調装置による検出がより容易であると考えられるより大きなタイミングの変化を使用することができる。この実施形態においては、データの伝送が、タグからインタロゲータへのデータ伝送とインタロゲータからタグへのデータ伝送との間で交互する。この動作モードにおいては、インタロゲータが、タグからのデータを欲するときに等間隔の「論理1」パルスを送信し、その後に送信を停止して受信を開始するようにタグへと合図するため、パルス間の時間を変化させる。このモードでの動作において、「論理0」のインタロゲータパルスの場合は、トランスポンダにトランスポンダにおける到着角度に依存する変調の生成を生じさせ、したがってこのトランスポンダパルスは、インタロゲータへのデータの源として適さない。受信したパルスにOOK変調を確実に加えることは、現実的でない。
【0080】
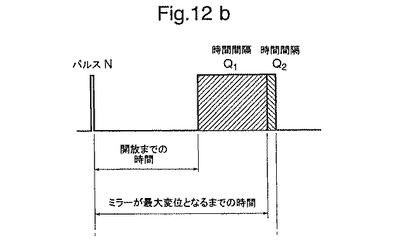
単純な手法が、半二重の通信をもたらし、すなわち一度に一方向の通信のみが生じる。この構成においては、インタロゲータからのパルスが、トランスポンダによって、時間間隔Q1に入る場合に論理「1」として解釈され、時間間隔Q2に入る場合に論理「0」として解釈される。これは、インタロゲータによって発せられるパルス間の時間間隔t0、t1を変化させることに対応する。時間間隔Q1は、マイクロミラーがプルダウン位置から基板から最大の距離の位置へと移動するときの期間をカバーし、時間間隔が、マイクロミラーがこの位置に達した後の短い期間をカバーする。期間Q1におけるインタロゲータパルスの正確なタイミングは、トランスポンダからの逆反射がインタロゲータへとデータを送信するための最適なコントラストを有するように保証する較正モードによって決定される。インタロゲータからのパルスが、時間間隔Q2において到着するとき、逆反射係数は、主として変調器への入射角度に依存し、したがって逆反射信号には有用な情報は含まれない。したがって、インタロゲータがトランスポンダへとデータを通信できるが、そのようにしているとき、トランスポンダからインタロゲータへとデータを通信する能力は損なわれる。インタロゲータは、通信を終えたときに、「論理1」のパルス列を送信し、タグがこれを変調して、インタロゲータへと返すことができる。
【0081】
第3の実施形態においては、大きな時間シフトが、しかしながらトランスポンダからインタロゲータへの通信が「論理0」のパルスを送信するインタロゲータによって中断されないようなやり方で使用される。インタロゲータは、論理「1」のパルスを通常のやり方で送信する一方で、トランスポンダのマイクロミラー素子の振動の周期に正確に等しい量だけ遅延させることによって論理「0」のパルスを示す。トランスポンダは、論理「1」のパルスが検出されるときは常に通常のやり方で動作するが、論理「1」のパルスが検出できない場合は、マイクロミラーをホールドダウンシステムに拘束するために電子システムを使用する前に、マイクロミラーに第2の振動を生成させる。この場合、論理「1」のインタロゲータパルスについて生み出される変調が、論理「0」のインタロゲータパルスにも複製される。これの利点は、トランスポンダからインタロゲータへのデータストリームが、インタロゲータからトランスポンダへのデータの送信によって中断されることがない点にあるが、欠点は、データレートが低下する点にある。このような仕組みが図13に示されており、インタロゲータからの論理「1」の受信の結果として、変調器が、受信したパルスを、マイクロミラーの第1の振動の際に変調している。第1の振動の際に到着する論理「1」のパルスを検出し、トランスポンダは、ただ1回の振動の後にマイクロミラーを保持する。
【0082】
第1の振動の際の所定の時間間隔132の間に論理「1」が受信130されない場合、マイクロミラーは、第2の振動への続行を許され、第2の振動の際に到着する論理「0」を受信することができる。第2の振動の際の所定の時間間隔133の間に論理「0」が受信131される場合、それが変調され、マイクロミラーが第2の振動の完了時にのみプルダウンされる。図13は、論理「1」が受信されない場合の2つの完全な振動を示している。
【0083】
図14は、マイクロミラーの1つの振動周期の2つの半分を、第1の半分Q1がインタロゲータの論理「1」のパルスによってインタロゲートされ、第2の半分Q2がインタロゲータの論理「0」のパルスによってインタロゲートされるように使用できる方法を説明している。
【0084】
そのような通信の実施形態の1つにおいて、インタロゲータが、タグへのインタロゲーション信号の入射の角度に関する情報を割り出す「時間較正モード」を開始する。インタロゲータは、適切なデータを取得した後で、「通信モード」へと移行し、時間較正モードにおいて得たデータを通信プロセスを最適化するために使用する。「時間較正モード」において、インタロゲータは、上述した角度測定モードと同様に、隣接パルス間にいくつかの異なるタイミングを有する一連のタイミングパルスを送信する。トランスポンダの検出器が、タイミングパルスの到着時刻を検出するが、到着角度の割り出しは試みない。トランスポンダ駆動回路が、固定の時間遅延の後に変調器について解放および拘束のプロセスを開始して、後続のパルスを変調し、インタロゲータへと逆反射させる。インタロゲータの受信器が、異なる時間遅延のそれぞれについて信号強度を測定し、どの時間間隔が最強の信号をもたらすかを特定する。この間隔が、トランスポンダからの論理「1」の信号が最大の信号強度を有するようなタイミングに相当し、インタロゲータは、このパルス間のタイミングを後の通信モードにおいて使用する。この結果、通信モードにおけるパルス繰り返し速度が、トランスポンダの変調器への入射の角度の変化に従って変化することに留意されたい。
【0085】
通信モードにおいて、トランスポンダは、2つのやり方のうちの一方で、「解放および拘束」機構を動作させる。第1のやり方においては、固定の時間遅延の後で解放および拘束のプロセスを開始させ、論理「1」を示すためにパルスを変調し、論理「0」を示すために変調を行わない(あるいは、この反対)。第2のやり方においては、論理「1」を示すために標準の時間遅延にて変調を行い、論理「0」を示すために異なる時間遅延にて変調を行う。タグは、インタロゲータから到着するパルスの間隔を測定でき、そこから、タグへの入射の角度についての情報を導出することができる。したがって、変調器が論理「0」について最小の信号強度をもたらすように、最適な時間遅延を計算することができる。前者の利点は、実現が最も簡単である点にある。後者の技法の利点は、最大の角度範囲にわたって論理「1」と論理「0」との間に最大のコントラストがもたらされる点にある。
【0086】
第3の通信の実施形態においては、インタロゲータが、第2の通信の実施形態において述べたやり方と同じやり方で機能するが、さらにインタロゲータレーザが、タイムシフトキーイングを使用してトランスポンダへとメッセージを送信すると同時に、オン−オフキーイングによってトランスポンダからメッセージを受信する。
【0087】
明確な区別のために必要とされる時間シフトが200ナノ秒よりも大きい場合を検討すると、トランスポンダへのメッセージの送信にタイムシフトキーイングを使用するインタロゲータおよびインタロゲータへのメッセージの送信にタイムシフトキーイングを使用するトランスポンダによって、インタロゲータおよびトランスポンダが双方向の通信に関与できる少なくとも3つのやり方が存在する。
【0088】
さらに図14を参照し、変調周期におけるキー時間を検討する。マイクロミラーが、時刻tRにおいて解放され、最初の最大透過率が、解放時刻の時間tx後に生じる。マイクロミラーは、振動周期tcを有し、第2の最大値は、マイクロミラーがホールドダウンへと戻るときに生じる。対称ゆえ、これは解放時刻の時間tc−tx後に生じる。振動周期tcは、マイクロミラーに固定のパラメータであり、透過時間txは、角度に依存し、通信モードが開始される前の動作の較正モードによって割り出されている。
【0089】
変調器は、透過の最大の前の時間tmにおいて生じる透過の最小を有する。対称ゆえ、マイクロミラーの解放時刻の時間tc−tx+tm後に生じる第2の透過の最小が存在する。時間tmも角度にのみ依存し、時間txが較正モードから割り出される場合、例えばルックアップテーブルを使用することによって値tmを割り出すことが可能である。トランスポンダは、txのすべての異なる値についてtmの知られている値が存在するようにルックアップテーブルを有することができる。
【0090】
さらに図14を参照し、変調器がインタロゲータへと論理「1」を送信すべく先のインタロゲータパルスの時間tR後に解放され、論理「0」を送信すべく先のインタロゲータパルスの時間tR+tm後に解放されるトランスポンダを検討する。インタロゲータは、トランスポンダへと論理「1」を送信する場合には、先のインタロゲータパルスの時間tR+tx後にパルスを送信し、トランスポンダへと論理「0」を送信する場合には、先のインタロゲータパルスの時間tR+tm+tc−tx後にパルスを送信するように時間を決めている。
【0091】
トランスポンダの変調器は、論理「1」のインタロゲータパルスによってインタロゲートされた場合、論理「1」についてはマイクロミラーの解放の時間tx後にパルスを変調し、論理「0」については解放時刻に対する時間tx−tmにおいてパルスを変調する。これは、時間間隔Q1の機械的振動の第1の半分において生じ、インタロゲータパルスがトランスポンダによって論理「1」として解釈される。インタロゲータへの論理「1」の信号は、最大の逆反射であり、論理「0」の信号は、最小の逆反射である。
【0092】
インタロゲータが論理「0」のデータビットを含む場合、それは時刻tR+tm+tc−txにおいて送信される。変調器がインタロゲータへと論理「1」のパルスを送信している場合、マイクロミラーが時間tRにおいて解放され、インタロゲータパルスは、解放時刻に対する時間tc+tm−txにおいて到着する。上述のように、変調器は、最小強度の逆反射をインタロゲータの検出器へと送信する。変調器が論理「0」のパルスを送信している場合、マイクロミラーは先のインタロゲータパルスの時間tR+tm後に解放され、インタロゲータパルスは、マイクロミラーの解放の時間tc−tx後に変調器に到着する。上述のように、インタロゲータパルスが最大の透過を通過し、インタロゲータにおける論理「0」信号は最大値を有する。
【0093】
したがって、インタロゲータパルスがトランスポンダへと論理「1」を送信しているとき、トランスポンダは、論理「1」について最大強度の信号である信号を送り返し、論理「0」について最小強度の信号を送り返す。インタロゲータパルスがトランスポンダへと論理「0」を送信しているとき、トランスポンダは、論理「1」について最小強度の信号である信号を送り返し、論理「0」について最大強度の信号を送り返す。インタロゲータの検出器が、論理「0」のインタロゲータパルスを論理「1」のインタロゲータパルスから区別する時間シフトを検出し、したがって全二重モードにおいてトランスポンダへとデータを送信しているときに、インタロゲータが到着する信号を論理「1」または論理「0」として正しく解釈するように保証するアルゴリズムを単刀直入に実現できる。
【0094】
上述のタイミングが、tc、tR、tm、およびtxに依存することに注目できる。パラメータtcおよびtRは、トランスポンダの設計によって固定され、txは、通信に先立って何らかの方法で測定される。さらに、ルックアップテーブルなどの方法によって、ユーザは、設定プロセスにおいて測定されたtxの値をtmの値を割り出すために使用することができる。したがって、インタロゲータおよびトランスポンダは、すべてのパラメータを推定でき、全二重モードの通信リンクの最大の性能をもたらすことができる。
【0095】
次に、図15を参照し、トランスポンダが論理「1」について変調器を駆動し、論理「0」について変調器をホールドダウンに保つように構成されている場合の最適なタイミングを検討する。変調器が、先のインタロゲータパルスの時間tR後に解放され、インタロゲータパルスが論理「1」でエンコードされている場合には、最大の透過がもたらされるよう、時間tR+txにおいてトランスポンダに到着するように時間を決めている。インタロゲータパルスが論理「0」でエンコードされている場合には、透過のための最良の時間は、時間tR+tc−txにあり、マイクロミラーがプルダウン位置へと戻るときの最大の透過が存在する時刻に一致する。この場合、トランスポンダによって発せられる論理状態は、図14の構成によって例示される状況と対照的に、インタロゲータパルスの論理状態に左右されない。
【0096】
当然ながら、インタロゲータの動作モードは、効果的な通信を保証するため、トランスポンダの動作モード(すなわち、図14の動作モードまたは図15の動作モード)に適合していなければならない。
【0097】
このようなシステムに使用されるレーザは、タイムシフトキーイングを実現するように容易に構成することが可能である。ダイオードレーザは、短い光パルスの放射をもたらす短い電気パルスによって駆動される。パルスのエネルギーを、エルビウムをドープしたファイバ増幅器に通すことによって高める。レーザパルスのタイミングを、単に電気駆動パルスのタイミングを変えることによって変化させることができる。
【0098】
この手法の1つの応用は、変調装置へと「ハンドシェイク」メッセージを提供することにある。変調装置が、インタロゲータが認証された通信相手であるか否かを判断するために、時間シフトパルスの特定のパターンまたは符号を要求することができる。他の応用は、変調装置からのデータの流れをインタロゲータによって制御できるようにすることにある。例えば、変調装置がデータをブロックで送信する場合、インタロゲータが、各ブロックの送信をいつ開始すべきかを伝えることができる。データの流れの制御を、大気の乱れによって引き起こされるレーザ強度の変動(シンチレーション)によって生じるエラーを克服するために使用することができる。エラー補正コードまたはピーク強度の単純な測定が、データ喪失の可能性を示している場合、インタロゲータが、データの再送信を求めるべく変調装置と通信することができる。インタロゲータが、戻りの信号が特定のレベルを下回るときに、時間シフトされたパルスを送信でき、変調装置が、先のデータのブロックを速やかに再送信することができる。
【0099】
他の用途は、取得システムがより効率的にトランスポンダからの光を集めることができるよう、レーザインタロゲータがビーム位置決めシステムを最適化させているときにトランスポンダに特定のパルスのパターンを発するように指示することにある。
【0100】
さらなる用途は、変調装置の初期の較正にあると考えられる。インタロゲータが変調装置を照射し、変調装置が、自身の設定について微細な調節を実行する。インタロゲータが、最適な性能が達成されたときにその旨を伝えるべく、変調装置と通信できる。
【0101】
本明細書の教示を理解しようとする当業者にとって明らかであるとおり、本明細書に提示したあらゆる範囲および装置の意義は、求める効果を失うことなく拡張または変更が可能である。
【図面の簡単な説明】
【0102】
【図1a】本発明による典型的なマイクロミラー素子および典型的なばね構造の斜視図を示している(基板は示されていない)。
【図1b】本発明によるマイクロミラー素子および典型的なばね構造の側面図を示している。
【図1c】本発明によるマイクロミラー素子のアレイの平面図を示している。
【図2】本発明によるマイクロミラーと基板との間の離間の時間変化の概略のグラフを示している。
【図3a】垂直な入射角度について、本発明による光変調器の透過特性の概略のグラフを示している。
【図3b】60度の入射角度について、本発明による光変調器の透過特性の概略のグラフを示している。
【図4】本発明による変調器の時間に対する動的応答の概略のグラフを示している。
【図5】本発明による印加電圧を透過信号と比較する概略のグラフを示している。
【図6】本発明による第1の変調装置の概略図を示している。
【図7】本発明による第2の変調装置の概略図を示している。
【図8】逆反射器を取り入れてなる本発明による第3の変調装置の概略図を示している。
【図9a】逆反射器を取り入れてなる本発明による第4の変調装置の概略図を示している。
【図9b】逆反射器を取り入れてなる本発明による第5の変調装置の概略図を示している。
【図9c】本発明によるシステムの概略図を示している。
【図10】本発明による変調方法のフロー図を示している。
【図11】本発明に従い、タイムシフトキーイングによってエンコードされている受信パルス、および変調されて送信されるオン−オフキーイングパルスの概略のグラフを示している。
【図12a】本発明によるインタロゲータパルスのタイミングの第1の例の概略のグラフを示している。
【図12b】本発明によるインタロゲータパルスのタイミングの第2の例の概略のグラフを示している。
【図13】本発明による通信の第2の例の概略図を示している。
【図14】本発明による通信の第3の例の概略図を示している。
【図15】本発明による通信の第4の例の概略図を示している。
【特許請求の範囲】
【請求項1】
二重光通信を提供する方法であって、
タイムシフトキーイングによってエンコードされた信号を受信すること、および
オン−オフ信号を送信するために、受信したパルスを選択的に変調すること
を備える方法。
【請求項2】
変調器が、受信したパルスを選択的に反射させる、請求項1に記載の方法。
【請求項3】
反射されるパルスが、逆反射される、請求項1または2に記載の方法。
【請求項4】
選択的に透過性となる素子であって、動作時に、タイムシフトキーイングによってエンコードされた入射信号の連続するパルスを選択的に変調して、オン−オフエンコードされた信号をもたらすように構成された素子
を備える、光信号変調器。
【請求項5】
連続するパルスを選択的に変調したパルスを反射させるように構成された反射器
をさらに備える、請求項4に記載の光変調器。
【請求項6】
反射器が、逆反射器である、請求項5に記載の光変調器。
【請求項7】
オン−オフのパルスによってエンコードされた信号であって、第2のタイムシフトキーイングによってエンコードされた光信号に応答して生成された信号を備え、
信号のオンパルスが、第2のタイムシフトキーイングによってエンコードされた光信号の時間シフトの特徴を呈している、光通信信号。
【請求項8】
タイムシフトキーイングによってエンコードされた第1の信号と、オン−オフによってエンコードされた第2の信号とを備え、
オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号の対応するパルスを時間遅延させてなる導出物であり、
オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号のパルスから派生した時間シフトの特徴を呈している、複合光信号。
【請求項1】
二重光通信を提供する方法であって、
タイムシフトキーイングによってエンコードされた信号を受信すること、および
オン−オフ信号を送信するために、受信したパルスを選択的に変調すること
を備える方法。
【請求項2】
変調器が、受信したパルスを選択的に反射させる、請求項1に記載の方法。
【請求項3】
反射されるパルスが、逆反射される、請求項1または2に記載の方法。
【請求項4】
選択的に透過性となる素子であって、動作時に、タイムシフトキーイングによってエンコードされた入射信号の連続するパルスを選択的に変調して、オン−オフエンコードされた信号をもたらすように構成された素子
を備える、光信号変調器。
【請求項5】
連続するパルスを選択的に変調したパルスを反射させるように構成された反射器
をさらに備える、請求項4に記載の光変調器。
【請求項6】
反射器が、逆反射器である、請求項5に記載の光変調器。
【請求項7】
オン−オフのパルスによってエンコードされた信号であって、第2のタイムシフトキーイングによってエンコードされた光信号に応答して生成された信号を備え、
信号のオンパルスが、第2のタイムシフトキーイングによってエンコードされた光信号の時間シフトの特徴を呈している、光通信信号。
【請求項8】
タイムシフトキーイングによってエンコードされた第1の信号と、オン−オフによってエンコードされた第2の信号とを備え、
オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号の対応するパルスを時間遅延させてなる導出物であり、
オン−オフ信号のパルスが、タイムシフトキーイングによってエンコードされた第1の信号のパルスから派生した時間シフトの特徴を呈している、複合光信号。
【図1a】

【図1b】
【図1c】
【図2】
【図3a】
【図3b】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9a】

【図9b】
【図9c】

【図10】

【図11】
【図12a】

【図12b】
【図13】

【図14】

【図15】

【図1b】
【図1c】
【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9a】
【図9b】
【図9c】
【図10】
【図11】
【図12a】
【図12b】
【図13】
【図14】
【図15】
【公表番号】特表2009−512890(P2009−512890A)
【公表日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願番号】特願2008−536120(P2008−536120)
【出願日】平成18年10月19日(2006.10.19)
【国際出願番号】PCT/GB2006/003884
【国際公開番号】WO2007/045872
【国際公開日】平成19年4月26日(2007.4.26)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
【公表日】平成21年3月26日(2009.3.26)
【国際特許分類】
【出願日】平成18年10月19日(2006.10.19)
【国際出願番号】PCT/GB2006/003884
【国際公開番号】WO2007/045872
【国際公開日】平成19年4月26日(2007.4.26)
【出願人】(501352882)キネテイツク・リミテツド (93)
【Fターム(参考)】
[ Back to top ]