
交通カメラ画像を表示する方法及び交通カメラ画像表示システム
【課題】必要なときに、交通カメラ画像が表示できるようにすること。
【解決手段】車両の挙動をモニタリングし、当該車両の挙動に基づいて交通事象の存在を判定し、交通カメラによる道路の画像を受信し、交通事象が検出された場合に、その交通カメラ画像をディスプレイに表示する。
【解決手段】車両の挙動をモニタリングし、当該車両の挙動に基づいて交通事象の存在を判定し、交通カメラによる道路の画像を受信し、交通事象が検出された場合に、その交通カメラ画像をディスプレイに表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交通カメラ画像を表示する方法、及び交通カメラ画像表示システムに関する。
【背景技術】
【0002】
このセクションでは、必ずしも公知技術に当らない、本発明に関連する背景技術を説明する。現代の車両は、工場で据え付けられた、組み込みのナビゲーションシステムや、持ち運び可能であり、車両のフロントガラスの内側面などに簡単に着脱することができる市販のナビゲーションシステムを備えているものがある。そのような車両のナビゲーションシステムのなかには、車両の正面又は周囲の道路の交通カメラから与えられるリアルタイムな交通カメラ画像を表示できるものがある。ナビゲーションシステムのディスプレイ上でアイコンを選択することによって、特定のカメラ画像が選択される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
上述したナビゲーションのディスプレイに表示される交通カメラ画像は、その目的に対して満足できるものであるが、そのようなシステムは、いくつかの制約を受けることを免れない。
【0004】
一つの制約として、ナビゲーションシステムのディスプレイ上に、読み取り可能に表示されるアイコンの数がある。より具体的には、運転者が、都会のような人口稠密な都市圏を運転しているとすると、そのような都会では、ほぼ交通信号機毎に、交通カメラ画像が利用可能となる。与えられた交通カメラ画像のどれかを選択することは、ナビゲーションシステムのディスプレイ上で、アイコンを選択することを意味するが、そのディスプレイは、交通カメラ画像のアイコンのみでなく、“興味のある場所(point of interest)”のアイコンや“建物(building)”のアイコンなどの他のアイコンによって非常に混み合ったものとなる。
【0005】
従って、必要とされるものは、アイコンでナビゲーションシステムのディスプレイが過密となることを避けるべく、交通カメラ画像を選択的にナビゲーションシステムのディスプレイ上に表示するためのシステム及び方法である。
【課題を解決するための手段】
【0006】
このセクションでは、本発明の概要を述べる。すなわち、本発明の最大限の範囲を網羅的に開示したものではない。方法の発明の各ステップは、記載された順序に従って実行されても良いし、記載された順序からずれた順序で実行されても良い。
【0007】
車両内のディスプレイに、交通カメラによる道路の画像を表示する方法は、車両の挙動をモニタリングし、車両の挙動に基づいて交通事象の存在を判定し、交通カメラによる道路の画像を受信し、交通事象が検出された場合に、その交通カメラ画像をディスプレイに表示することを含むものである。
【0008】
さらに、交通カメラ画像を表示する方法は、車両の挙動と、メモリに格納された運転データのような予め記録された運転データとの比較に基づいて、交通事象の存在を判定することを含む。
【0009】
また、交通カメラ画像を表示する方法は、車両の挙動として、例えば車両速度をモニタリングするなど、車両をモニタリングすることを含む。そして、予め記録された運転データは、道路に対応付けられた運転速度データを含み、交通カメラ画像を表示する方法は、車両速度が、予め記録された運転速度データよりも低いかどうかに基づいて、交通事象の存在を判定することを含むものであっても良い。
【0010】
また、予め記録された運転データは、道路に対応付けられた公示速度を含むものであっても良い。そして、交通カメラ画像を表示する方法は、車両速度が、所定の期間、公示速度よりも低いかどうかに基づいて、交通事象の存在を判定することを含む。
【0011】
道路に対応付けられる予め記録された速度は、時刻及び日付の少なくとも一方に基づいて決定されても良い。さらに、道路に対応付けられる予め記録された速度は、道路の分類によって決定されても良い。
【0012】
他の例において、車両の挙動は、車両のブレーキ操作を含むことができる。交通カメラ画像を表示する方法は、少なくとも所定期間の間、車両ブレーキがかけられたかどうかに基づいて、交通事象の存在を判定することを含む。
【0013】
さらに続けると、交通カメラ画像を表示する方法は、車両が、その車両が接近している交通信号機から所定距離になったかを判定することを含むものであっても良い。交通カメラ画像を表示する方法は、さらに、車両が、接近している交通信号機から所定距離内にいる場合に所定時間待機し、その後、再び、車両が交通信号機から所定距離内にいるかを判定し、それにより、車両が走行する道路上に交通事象が存在するかどうかを判定することを含むものであっても良い。
【0014】
また、交通カメラ画像を表示する方法は、車両の前方の道路に存在する交通カメラを選択するステップを含むものであっても良い。別の例において、方法は、ナビゲーションシステムによって与えられた案内経路上に存在する交通カメラを選択するステップを含むものであっても良い。さらに、選択するステップは、車両に最も近い交通カメラを選択すること、あるいは、複数のカメラを選択することを含むものであっても良い。
【0015】
また、交通カメラ画像を表示する方法は、ディスプレイ上に、選択されたカメラの位置を示す地図とともに交通カメラ画像を表示することを含むものであっても良い。
【0016】
車両用交通カメラ画像表示システムは、車両の挙動をモニタリングするモニタリング手段と、交通事象の存在を検出する電気的なコンピューティングシステムと、その交通事象と関連する交通カメラ画像を受信する受信手段と、車両内に配置され、交通カメラ画像を表示する表示部とを備える。電気的なコンピューティングシステムは、車両の挙動に基づいて交通事象の存在を検出することができ、表示部は、電気的なコンピューティングシステムによって交通事象が検出されたときに、交通カメラ画像を表示する。さらに、電気的なコンピューティングシステムは、車両の挙動に基づいて、車両の制動期間を計算し、その制動期間が所定時間よりも長い場合に、交通事象を検出することもできる。
【0017】
また、交通カメラ画像表示システムは、各々の道路分類に対する基準速度データを記憶した速度データベースを備えていても良い。電気的なコンピューティングシステムは、車両が走行している道路の等級を決定し、車両の挙動に基づいて当該車両の速度を算出する。そして、電気的なコンピューティングシステムは、車両の速度が、その道路分類の基準速度データよりも低ければ、交通事象の存在を検出するようにしても良い。さらに、車両用表示システムが、車両の挙動をモニタリングするモニタリング手段と、車両の挙動に基づいて交通事象の存在を判定する判定手段と、道路上の交通カメラから画像を受信する受信手段と、本明細書に記載された方式で、交通カメラ画像に従いカメラ画像を表示する表示手段とを備えるようにしても良い。
【0018】
本願発明が適用できる更なる範囲が、以下の説明から明らかになる。この「発明の概要」における記載及び特定の例示内容は、説明の目的のみを意図したものであり、本願発明の範囲を限定するものではない。
【0019】
また、本願において開示される図面は、可能な全ての実施形態ではなく、厳選された実施形態を説明することを目的とするもので、本願発明の保護範囲を限定する意図を有するものではない。
【図面の簡単な説明】
【0020】
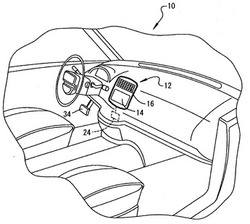
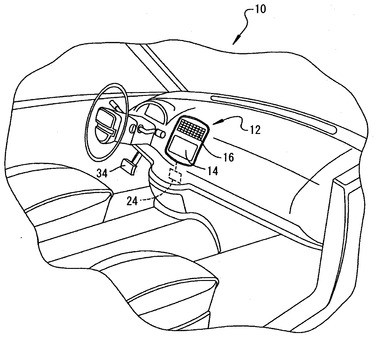
【図1】ナビゲーションシステムの配置を示す車両の室内を表した斜視図である。
【図2】実施形態における、車両用ナビゲーションシステムの制御方法を示すフローチャートである。
【図3】信号機に接近するにつれて、速度を低下させ、そして停止する車両の状況を示す図である。
【図4】信号機を中心とする所定半径外の車両を示す図である。
【図5】信号機を中心とする所定判定内の車両を示す図である。
【図6】交通事象、建物、目盛りなどを示す、例示としての表示画面の画像を示す図である。
【図7】運転者の速度行動データベースを示すテーブルである。
【図8】工場出荷時のデフォルト速度データベースを示すテーブルである。
【図9】実施形態における、データベースを選択するための方法を示すフローチャートである。
【図10】学習下限値からはずれ値を除外するために用いられる釣鐘状の曲線の例を示すグラフである。
【図11】実施形態において、ドライバーの行動の学習方法を示すフローチャートである。
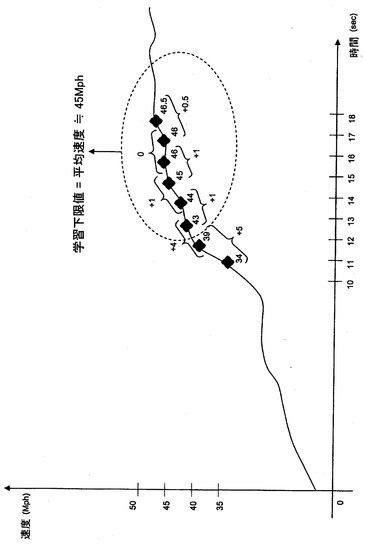
【図12】サンプリング速度と、そのサンプリング速度を用いた学習下限値の計算の一例を示すグラフである。
【発明を実施するための形態】
【0021】
以下の実施形態の説明で参照する図面において、共通の参照番号は、同じ部品を示している。
【0022】
添付図面の図1〜図12を参照して、本発明の実施形態が詳細に説明される。図1は、工場で据え付けられたナビゲーションシステム12を備えた車両の室内の様子を示している。しかしながら、本発明は、持ち運び可能であり、車両のフロントガラスの内側面などに簡単に着脱することができる市販のナビゲーションシステムを除外するものではない。
【0023】
ナビゲーションシステム12は、ディスプレイ14及びボタン16を有し、それらはナビゲーションシステム12の機能を操作するために用いられる。また、ディスプレイ14はタッチディスプレイであっても良く、この場合、ナビゲーションシステム12の機能を操作するために、ディスプレイ14が指で直接タッチされる。ディスプレイ14におけるタッチディスプレイの機能は、ナビゲーションシステム12のオペレーティングソフトウェアと共同して動作する。ナビゲーションシステム12のオペレーティングソフトウェアは、ナビゲーションシステム12の電気的なコンピューティングシステムによって実行される。そのような電気的なコンピューティングシステムは、車両に取り付けられた電気的なコンピューティングユニットと、外部のリモートサーバーとから構成することができる。この実施形態においては、オペレーティングソフトウェアは、車両の電気的なコンピューティングユニットによって実行されるが、他の実施形態では、処理の一部又は全部を車両外において実行することも可能である。
【0024】
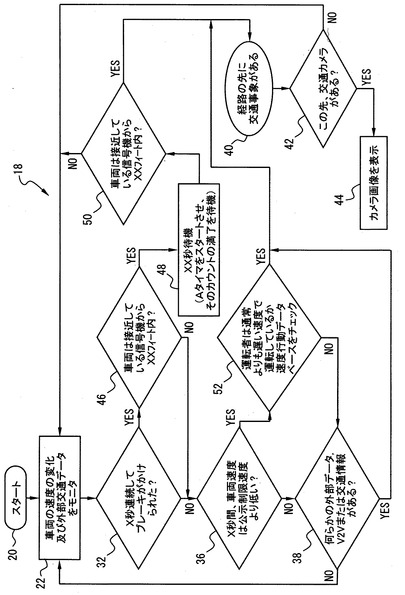
図2を参照して、ナビゲーションシステム12のようなナビゲーションシステムを制御する方法としての処理ロジックを示すフローチャートについて説明する。ブロック20におけるロジックの開始に続いて、処理ロジック18は、ブロック22に進み、ナビゲーションシステム12の制御モジュール24が、例えば、車両速度及び外部サーバを介して外部の交通データをモニタする。なお、本実施形態では、ナビゲーションシステム12と直接結合され、通信を行う制御モジュール24を用いる例について説明するが、ナビゲーションシステム12にデータを供給したり、他の機能を実行したり、特定の機能に特化した追加の制御モジュールが用いられても良い。
【0025】
ブロック22と関連づけられた機能に続いて、車両10の運転者が車両を走行させる速度が、車両が走行している道路の種別と対応付けてモニタされる。例えば、車両10の速度は制御モジュール24によってモニタされ、その制御モジュール24は、車両のスピードメーター、車両の速度を受信するエンジン制御モジュール、同じく車両速度を受信するトランスミッション制御モジュール、あるいは、例えばGPSを備えた携帯型のナビゲーションシステムなどの車両の速度をモニタする他の車両装置に直接連結されている。
【0026】
道路の分類に関して、ナビゲーションシステムの地図データを提供している会社が、走行する道路を選択する際に運転者に役立つようにするため、及びどの種別の道路が利用可能であるかを運転者に知らせるために、道路を分類する。例えば、4レーン若しくは6レーンの出入り口が制限されたハイウェイは、道路種別“L1”として分類される。例えばビジネス地区において、多様なアクセスが可能な道路のような、出入り口が制限されていない4レーンの道路は、道路種別“L2”として分類される。郊外地域の2レーンの道路(すなわち、各々の方向に1レーンずつ)は“L3”として分類され、居住地域の通りは“L4”として分類され、地方の田舎道は“L5”として分類される。
【0027】
交通データや情報を収集する際に、種々の方法やデバイスが使用可能である。例えば、道路下に設置されたセンサが、どのぐらいの頻度でそのセンサ上を走行する車両を検知したかに基づいて、交通状況を送信するようにしても良い。あるいは、単位時間当たりの車両の数が、閾値に対応する車両の数よりも多いことを検知したとき、交通渋滞のような交通事象の発生を知らせるようにしても良い。一方、単位時間当たりの車両の数が、閾値に対応する車両の数よりも少ないことを検知したときには、交通渋滞のような交通事象の発生を知らせることはない。別の例として、交通データは、交通の状況に関する交通情報を提供するために予め規定された道路を運転される“ライブフィールド車両”によって収集されても良い。さらに、パーソナルナビゲーション装置(“PND”)や携帯電話からのプローブデータが、交通データとして収集されても良い。GPS位置と一緒に、そのような交通データ収集手法を用いることにより、1台以上の車両の位置及び速度を、例えば、初めに交通データを受信する周囲の通信タワーから、中央監視センターへ与えることができる。中央監視センターは、NavTEQ,TeleAtlas,INRIXなどであり、送信手法として、XM radio又はHD radioのようなサービスを用いて、端末装置(車両)に対して交通メッセージチャンネル(“TMC”)上で交通データを一斉に放送すれば良い。そのような交通データの供給は、例として、FM周波数の形態でHD radioにより行なわれたり、衛星信号として、XMから行なわれたりする。
【0028】
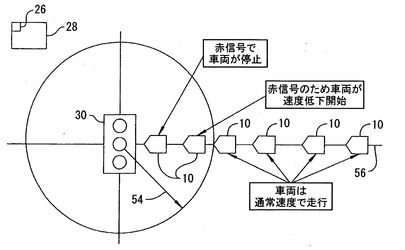
ブロック22について図3を参照して説明を続けると、車両の挙動をモニタリングする手段、あるいは車両における操作をモニタリングする手段である、制御モジュール24が、車両の速度行動のような車両挙動又は操作をモニタリングするとき、外部交通データも同じくモニタリングされる。より具体的には、外部交通データは、特定の時間間隔でダウンロードされ、取り込まれた交通データのような交通情報から、制御モジュール24によって最新情報が受け取られたり、あるいは実況情報(例えば、ビデオ)を介して制御モジュール24に与えられたりする。交通データは、オフィスビル28に居を構える交通データ収集会社によって管理されているサーバ26から供給されるもので、例えば実時間ビデオカメラから取得されたものである。交通情報は、無線又は有線にて、カメラ又は交通信号30(例えば、交通信号灯)からサーバ26に送信される。サーバ26は、その交通情報を車両10の制御モジュール24に通信し、それにより、交通情報は、運転者や乗員によって要求された場合に、ディスプレイ14に表示される。交通情報は、車両10が動いている間は、継続的に更新される。
【0029】
図2について説明を続けると、本実施形態では、ブロック22に続いて、制御ロジックが判定ブロック32に進み、そこにおいて、制御モジュール24は、少なくとも例えば4秒程度の所定の時間、ブレーキペダル34に力がかけられ、踏み込まれたか判定するために、車両のブレーキペダル34をモニタリングすることにより、車両のブレーキシステムを継続的にモニタする(つまり、車両の挙動あるいは操作が継続的にモニタされる)。ただし、所定の時間は、いかなる所定時間であっても良い。ブレーキペダル34が、少なくとも所定の時間、踏み込まれていないならば、ロジックはブロック36に進む。ブロック36では、ロジックは、車両速度が、例えば10秒間のような所定時間の間、公示速度よりも低いかを尋ねる。公示速度は、予め記録された運転データとして記憶されている。本実施形態においては、公示速度は、工場出荷時のデフォルト速度データベース、もしくは運転者の速度行動データベースに記憶される。道路に対応付けられる公示速度が、時刻や日付に基づいて決定されても良い。また、道路に対応付けられる公示速度は、道路分類によって決定されても良い(すなわち、本実施形態においては、“道路に対応付けられる公示速度”との用語は、対象となる同じ道路そのものにおける公示速度を意味するのではなく、同じ道路分類における公示速度を意味するのである。)。
【0030】
ブロック36の質問に対する応答が“NO”であった場合、ロジックはブロック38に進み、何らかの外部データ、車車間通信データ、又は交通情報があるかを尋ねる。質問ブロック38における応答が“NO”であると、ロジックはブロック22に戻り、再び各ブロックの処理を開始する。一方、ブロック38での質問の応答が“YES”である場合には、ロジックはブロック40に進み、ロジックは、車両が走行している道路の前方に交通事象が存在すると決定する。制御モジュール24によって動作され、交通事象に関連する交通カメラ画像を受信する手段であるロジックは、ブロック42に進み、そこで、車両10の前方に交通カメラがあるかどうかを尋ねる。カメラが車両10の前方、あるいは車両10が走行している道路の近傍に存在するならば(すなわち、交通カメラは、ナビゲーションシステム12によって与えられた案内経路上に存在するか、もしくは車両10の前方の案内経路から、例えば2ブロック程度の所定距離範囲内に存在するならば)、ロジックはブロック44に進む。そこにおいて、交通カメラ画像を受信する手段であり、かつ交通カメラ画像を表示する手段である、制御モジュール24は、カメラ画像を受信し、車両10内のナビゲーションシステム12のディスプレイ14に表示する。この際、ロジックは、車両10の前方の道路に存在する交通カメラを選択するステップを含んでも良い。他の例においては、ロジックは、ナビゲーションシステム12によって与えられた、案内経路上に存在する交通カメラを選択するステップを含んでいても良い。さらに、ロジックは、車両から最も近い交通カメラを選択しても良いし、もしくは複数のカメラを選択しても良い。また、ロジックは、選択されたカメラの位置を示す地図と一緒に、カメラ画像をディスプレイに表示しても良い。
【0031】
しかしながら、交通カメラが存在しない場合、上述したように、ロジックはブロック22に戻り、その後、ブロック32に進む。このとき、ブレーキペダル34に、少なくとも所定時間の間、継続的に力が加えられており、ブロック32における質問に対する応答が“YES”になると、ロジックはブロック46に進む。そこにおいて、ロジックは、車両10が、接近しつつある交通信号から所定距離範囲内であるかどうかを尋ねる。ブロック46における質問の結果が“NO”である場合、ロジックは質問ブロック36に進む。しかしながら、質問ブロック46の結果が“YES”であると、ロジックはブロック48に進んで所定時間だけ待機し、その後、ロジックは質問ブロック50に進む。そこにおいて、ロジックは、再び、車両10が、接近しつつある交通信号から所定距離範囲内であるかどうかを尋ねる。ブロック50における質問の結果が“NO”であると、ロジックはブロック22に戻る。一方、ブロック50における質問の結果が“YES”であると、ロジックはブロック40に進み、車両が走行している道路上の前方に交通事象が発生していると決定し、その後、質問ブロック42において、前方に交通カメラが存在しているかどうかを尋ねる。このとき、交通カメラが存在しているならば、ロジックはブロック44に進み、ナビゲーションシステム12が車両10の前方の交通カメラ画像を表示する。一方、車両10の前方にカメラは存在しないならば、ロジックは再びブロック22に戻る。
【0032】
質問ブロック36に関して、質問の結果が“YES”であったならば、そのとき、ロジックは質問ブロック52に進む。そこにおいて、ロジックは、運転者が通常よりも遅い速度で運転しているか尋ねる。運転者が通常よりも遅い速度で運転しているか否かのチェックは、交通事象の存在を判定する手段であり、かつ制御モジュール24によって行なわれる。制御モジュール24は、現在の運転者及び/又は現在の車両速度をチェックし、それを運転者の速度行動データベースと比較する。運転者の速度行動データベースは、車両が使用される間に取得され記録された、事前に記録された運転データ(つまり、基準速度データとして使用される通常の速度データ)を有する。道路に対応づけられた運転者の速度行動は、時刻と日付の少なくとも一方に基づいて決定されても良い。つまり、運転データを時刻や日付により分類して記憶しておき、過去の同じ時刻帯や日付の運転データを抽出したりしても良い。また、道路に対応付けられた運転者の速度行動は、道路分類によって決定されても良い(すなわち、本実施形態においては、“道路に対応付けられる運転者の速度行動”との言葉は、対象となる同じ道路そのものにおける運転者の速度行動を意味するのではなく、同じ道路分類における運転者の速度行動を意味する。)。
【0033】
車両の挙動に基づいて交通事象の存在を判定することは、車両の操作に基づいて交通事象を予測することを含む。交通事象の例には、道路上で停止している交通(車両)や、公示制限速度又は他の所定速度よりも遅い速度で前方を移動している車両などを含む。車両の操作の例には、ブレーキペダルを踏み込むことを含む。
【0034】
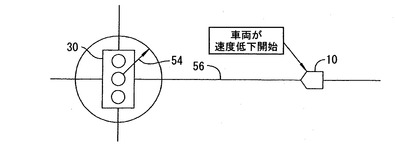
図3を参照すると、交通信号に接近しつつある車両10のシナリオが描かれている。より詳細に説明すると、図3は、車両10が交通信号30から所定半径、つまり所定距離54の範囲外であるときには、通常の速度、又は公示制限速度のような一定の速度で走行する車両10を示している。図3はまた、交通信号30から所定半径、つまり所定距離54の範囲内を移動する車両10も示している。交通信号30から所定半径、つまり所定距離54の範囲内に進入する地点において、車両10は、交通信号30によって表示される黄色信号又は赤信号のために、減速して、よりゆっくりとした速度での移動を開始する。
【0035】
図4は、図3のシナリオにおける可能性のある変化をさらに説明するために用いられるものであり、交通信号30から所定距離54の範囲内ではなく、むしろかなり離れている車両10を示している。しかしながら、図4に示される位置においてさえ、車両は減速を開始し、よりゆっくりとした速度での移動を開始するかもしれない。そのような状況において、制御モジュール24は、1つ以上の特定の“トリガ”又は警告によって、起こりうる交通状態について気付き、知らされることになる。可能性がある警告は、車両速度又は車両の制動である。これは、前方に存在する交通状態が、単に、例えば赤信号のために車両が速度を低下した結果ではなく、起こりうる交通上の障害が、道路の前方に存在していることを示す。この場合、車両10が交通信号30から所定距離54の範囲外であるので、制御モジュール24は、前方に存在する交通状態が、図3に示されるような交通信号の結果ではないことを理解する。トリガとしての車両の制動は、制動時間であり、それは、ブレーキペダル34に力が加えられ、ブレーキペダル34が踏み込まれた時間の長さである。
【0036】
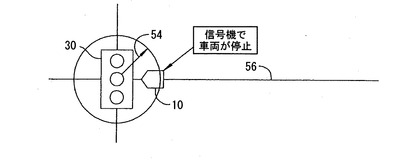
図5は、車両10が、交通信号30から処理距離54の範囲内にいるときのシナリオを示しており、ロジックは、車両速度やブレーキペダル34が踏み込まれた時間のようなトリガの1つによって、起こりうる交通状態を知らされる。ただし、図5に示されるシナリオにおいて、車両10が、単に信号30における赤信号のために停止したのか、それとも何らかの他の交通状態が存在するのかは分かっていない。それゆえ、ロジックは、交通信号30から所定半径54によって囲まれる範囲内にて費やした、あるいは留まっている時間をモニタする。もし、車両10が所定時間以上(例えば、120秒つまり2分間)、そのようなエリア内に留まっているならば、それは、車両10が単に交通信号30が赤から青に変わることを待っているのではなく、むしろ交通上の障害が、車両10が走行している道路56の前方に存在する可能性があることを意味する。交通信号は、停止を意味する赤信号から、発進を意味する青信号に、120秒よりも少ない時間以内に変化するものと思われる。しかしながら、そのような、120秒の所定時間は、交通信号30が動作するかもしれないいかなる所定時間に変更されても良い。
【0037】
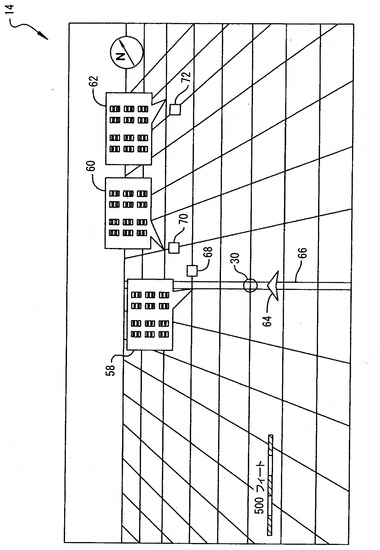
図6は、ナビゲーションシステムのディスプレイであって、外部交通データである種々の交通事象58,60,62の例を図示している、ディスプレイ14の拡大画像である。交通事象は、車両の速度低下又は停止を含み、所定の道路において交通の流れを公示制限速度よりも遅くさせる、車両の衝突、パレード、コンサート、スポーツイベント、降雨、降雪、あるいは他の気候的な出来事などによって引き起こされる。そして、図2のフローチャート18の各ステップでの、質問及びそれに対する結果から、位置64に居る車両の運転者は、ブレーキ34をかけること、又は道路66の公示制限速度以下で運転することによってディスプレイ14上で交通事象58を見ることができる。交通事象58の映像は、交通事象58の視認距離内に配置された、カメラ68によってディスプレイ14に提供される。さらなる例として、カメラ70は、都市内の異なる位置における交通事象60を映し出し、カメラ72は交通事象62を映し出す。
【0038】
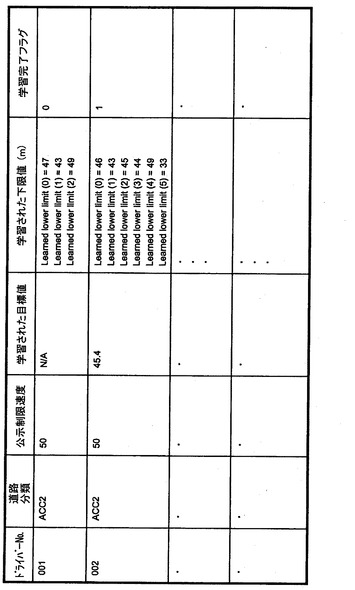
図7から図12は、運転者の速度行動データベースの構築方法を説明するためのものである。図7は、運転者の速度行動データベースである、「学習値テーブル」を示している。この「学習値テーブル」は、車両内又は外部のサーバに記憶される。「学習値テーブル」は、複数の欄を持ち、そこに、「運転者ナンバー」、「道路分類」、「学習目標値」、「学習下限値」、及び「学習完了フラグ」などの複数のパラメータを保持する。すなわち、「学習値テーブル」において、第1欄は少なくとも1つの「運転者ナンバー」を保持し、第2欄は少なくとも1つの「道路分類」を保持し、第3欄は少なくとも1つの「公示制限速度」を保持し、第4欄は少なくとも1つの「学習目標値」を保持し、第5欄は少なくとも1つの「学習下限値」を保持し、及び第6欄は少なくとも1つの「学習完了フラグ」を保持する。運転者ナンバーは、個々の運転者を表す。本実施形態において、個々の運転者の認識は、電子キーのコード、運転者の体重、シートポジション、指紋、声紋、瞳の虹彩、静脈認証、又は運転者の顔認証の中の1つ以上によって実現される。
【0039】
上述したように、道路分類は、私道、市道、一般国道、州間高速道路など、道路のグループを表すものである。本実施形態では、道路分類として、幹線分類コードを用いる。幹線分類コードは、ACC1:北米大陸全州間高速道路、ACC2:大都市圏間高速道路、ACC3:州間高速道路、ACC4:都市/郊外/地方道路、及びACC5:街路である。「道路分類」は、また、ある特定の道路区分を表すものであっても良い。さらに、他の分類が、幹線分類コードに代えて、「道路分類」として使用されても良い。一つの実施形態において、「I696W 1600 1900」は、「州間高速道路696号線西行き 16時から19時」を表す。そのような、ある特定の道路区分の分類において、システムは、通常、頻繁に交通渋滞が発生するポイントにおいて、交通カメラ画像が表示されることを回避するようにしても良い。
【0040】
「学習目標値」は、学習下限値と統計的な釣鐘状の曲線とに基づいて算出された、道路における運転者の通常の運転速度を表すものである。学習下限値は、各々の道路における、サンプリングされた運転者の実際の平均運転速度を示すものである。学習完了フラグは、学習目標値が、該当する道路分類に対して算出されたか否かに対する、肯定的又は否定的な応答を示すものである。この実施形態では、学習官僚フラグのデフォルト値は「0」である。
【0041】
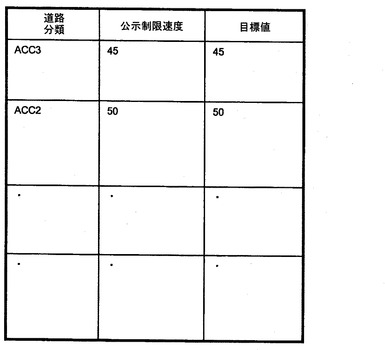
図8は、車両のナビゲーションシステムにプリインストールされたり、外部サーバに格納されたりする、工場出荷時のデフォルト速度データベースである、「デフォルト工場値テーブル」を示している。第1欄は、「道路分類」を含んでいる。第2欄は、「公示制限速度」を含んでいる。第3欄は、「目標値」を含んでいる。
【0042】
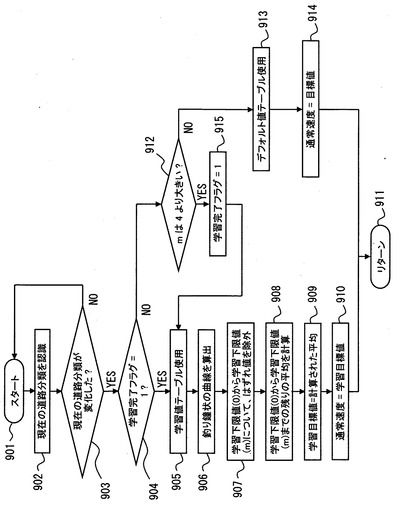
図9は、運転者の通常の運転速度を決定するために、いずれのデータベースが使用されるべきかを決定するためのフローチャートを示している。処理は、ブロック901からスタートし、ブロック902に進んで、現在の道路分類を認識する。道路分類の認識は、少なくとも車両のGPS装置と、ナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。そして、処理はブロック903に進み、現在の道路分類が、道路分類の認識に関して、前回の結果から変化したか否かを判定する。現在の道路分類が変化していないならば、処理はブロック901に戻る。一方、現在の道路分類が変化している場合、又は車両のイグニッションスイッチがまさに投入されたところである場合には、処理はブロック904に進む。そして、ブロック904において、認識された道路分類に対応する「学習完了フラグ」が1であるか否かを判定する(すなわち、認識された道路分類に対応する「学習完了フラグ」が、デフォルト値から変化されたかを判定する)。「学習完了フラグ」が1である場合、処理はブロック905に進む。一方、「学習完了フラグ」が1ではない場合、処理はブロック912に進む。
【0043】
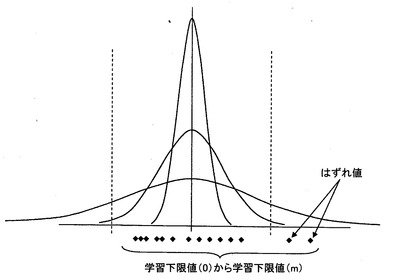
ブロック905では、図7に示される学習値テーブルより、「学習下限値(0)」から「学習下限値(m)」までを読み込む。このように複数の学習下限値がある。パラメータ「m」は、各々の「学習下限値」を特定するために用いられる。そして、処理はブロック906に進み、該当する道路分類に対する「学習下限値(0)」から「学習下限値(m)」に基づいて、釣鐘状の曲線を計算する。そして、処理はブロック907に進む。ブロック907では、計算された釣鐘状の曲線を用いて、はずれ値を定義する。そして、「学習下限値(0)」から「学習下限値(m)」までから、はずれ値を除外する(釣鐘状の曲線の例が、図10に示されている)。処理は、ブロック908に進み、はずれ値を除外した、「学習下限値(0)」から「学習下限値(m)」までの平均値の計算を実行する。そして、ブロック909に進んで、「学習下限値(0)」から「学習下限値(m)」の計算された平均値を、道路分類の「学習目標値」として保存する。処理はブロック910に進み、図2のブロック52において運転者の通常の運転速度の値として、計算された「学習目標値」を使用するようにし、ブロック911を介してブロック901に戻る。
【0044】
ブロック912では、カウンター「m」が、所定値「x」よりも大きいかどうかを判定し、カウンター「m」が「x」より大きくない場合、ブロック913に進む。一方、カウンター「m」が「x」より大きい場合、処理はブロック915に進む。この実施形態では、「x」は4である。ブロック913では、「デフォルト工場値テーブル」から該当する道路分類の「目標値」を読み込み、ブロック914に進む。このブロック914では、処理は、図2のブロック52において運転者の通常の運転速度の値として「目標値」を使用するようにし、ブロック901に戻る。ブロック915では、「学習完了フラグ」を1に設定し、その後、ブロック905に進む。
【0045】
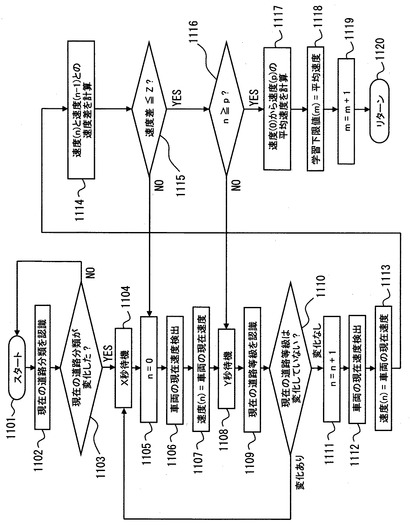
図11は、「学習下限値」を記憶する手法に関するフローチャートを示している。処理は、ブロック1101からスタートし、ブロック1102において、現在の道路分類の認識を実行する。図9に示すフローチャートと同様に、道路分類の認識は、少なくとも車両のGPS装置とナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。次に、ブロック1103において、現在の道路分類が、最新の(つまり、以前の)道路分類認識から変化したか否かを判定する。現在の道路分類が変化していなければ、処理はブロック1101に戻る。現在の道路分類が変化している場合、又は車両のイグニッションスイッチがまさに投入されたところである場合には、処理はブロック1104に進む。ブロック1104では、「x」秒間、カウントを行って待機する。この実施形態では、「x」は、10秒間である。「x」秒間カウントした後、処理はブロック1105に進む。ブロック1105では、カウンター「n」を0にセットし、ブロック1106に進む。ブロック1106では、車両速度センサ又はGPS装置によって、車両の現在の速度が検出される。そして、処理はブロック1107に進み、検出された現在の速度を「速度(n)」として記憶する。処理は、ブロック1108に進み、今度は「y」秒間、カウントを行って待機する。本実施形態では、「y」は1秒間である。「y」秒間カウントした後、処理はブロック1109に進む。ブロック1109では、現在の道路分類が認識される。ブロック1102と同様に、道路分類の認識は、少なくとも車両のGPS装置とナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。
【0046】
続くブロック1110において、現在の道路分類が、ブロック1102にて認識された道路分類から変化していないか判定される。現在の道路分類が変化していない場合には、処理はブロック1111に進む。一方、現在の道路分類が変化した場合には、処理はブロック1104に進む。ブロック1111では、カウンター「n」が1だけインクリメントされる。そして、処理はブロック1112に進み、再度、車両の現在の速度の検出が行なわれる。ブロック113では、検出された現在の車速が「速度(n)」としてメモリに記憶される。ブロック1114では、「速度(n)」と「速度(n−1)」との速度差が計算される。処理はブロック1115に進み、その速度差は、所定値「z」以下であるかの判定が行なわれる。速度差が所定値「z」よりも大きければ、処理はブロック1105に進む。この実施形態では、所定値「z」は2である。ブロック1116において、カウンター「n」が所定値「p」以上であるかの判定が行なわれる。「n」が所定値「p」以上であれば、処理はブロック1117に進む。「n」が所定値「p」より小さければ、処理はブロック1108に進む。この実施形態において、所定値「p」は5である。ブロック1117において、速度(0)から速度(p)までの平均速度が計算される。ブロック1118に進んで、計算された平均速度が、「学習下限値(m)」として保存される。処理はブロック1119に進み、「m」がインクリメントされる。そして、処理はブロック1120を介して、ブロック1101に戻る。「m」の工場出荷時のデフォルト値は0である。この実施形態では、個々の運転者を認識することによって、速度行動データベースは、各運転者に対して個別に学習下限値を記憶する。それにより、本実施形態では、システムが、個々の運転者の通常の運転速度を計算することができ、不要な交通カメラ画像がポップアップ表示されることを回避することができる。
【0047】
図12は、「学習下限値」がどのように計算されるかの例を示したグラフである。水平軸は、車両が新しい道路分類の道路を走行している経過時間を表している。垂直軸は、車両速度を表している。このグラフの原点は、システムが道路分類の変化を認識した時点を表している。その例に示されるように、初期の期間において、車両の速度は徐々に増加している。本実施形態では、システムは、道路分類の変化後10秒経過すると、車両速度のサンプリングを開始する。また、システムは毎秒ごとに速度差の計算を開始する。速度差が、5秒間の間、毎時2マイル以内に落ち着いているならば(6個の速度データある)、システムは、その6個の速度データの平均速度を計算する。図12に示す例では、6個の速度データは、43、44,45,46,46.5であり、平均速度は毎時45マイルとなる。この平均速度は「学習下限値(m)」としてシステムに記憶される。
【0048】
実施形態に関する前述の記載は、発明の説明の目的のために提供されたものであり、発明を完全に網羅したり、発明を制限したりすることを意図するものでもない。特定の実施形態及び/又は方法における個々の特徴事項は、その特定の実施形態に対して限定されるものではなく、互換性のあるものであり、特別な記載がなくとも、適当な実施形態において利用可能なものである。また、それらは色々な方法において変形されることも可能である。そのような変形は、本願発明から逸脱するものとみなされず、全ての変形例は本発明の範囲に含まれるものであることを意図している。
【0049】
具体的な細部は必ずしも採用される必要はなく、実施形態が色々な形で具体化され、また本願発明の範囲を限定するものと解釈されるべきものではないことについて、当該技術分野の技術者にとって明らかなことである。実施形態の説明においては、周知のプロセス、周知の装置構造、及び周知の技術については、詳細に記載していない。
【0050】
さらに、ここに説明された方法における工程、処理、および操作は、それらの実行順序が具体的に特定されている場合を除いて、ここに説明され、図示された特定の順序でのそれらの実行が必ず要求されるものとしては解釈されるべきではない。さらに、追加的な、または代替的な工程を採用することができることも理解されるべきである。
【符号の説明】
【0051】
10 車両
12 ナビゲーションシステム
14 ディスプレイ
24 制御モジュール
34 ブレーキペダル
【技術分野】
【0001】
本発明は、交通カメラ画像を表示する方法、及び交通カメラ画像表示システムに関する。
【背景技術】
【0002】
このセクションでは、必ずしも公知技術に当らない、本発明に関連する背景技術を説明する。現代の車両は、工場で据え付けられた、組み込みのナビゲーションシステムや、持ち運び可能であり、車両のフロントガラスの内側面などに簡単に着脱することができる市販のナビゲーションシステムを備えているものがある。そのような車両のナビゲーションシステムのなかには、車両の正面又は周囲の道路の交通カメラから与えられるリアルタイムな交通カメラ画像を表示できるものがある。ナビゲーションシステムのディスプレイ上でアイコンを選択することによって、特定のカメラ画像が選択される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
上述したナビゲーションのディスプレイに表示される交通カメラ画像は、その目的に対して満足できるものであるが、そのようなシステムは、いくつかの制約を受けることを免れない。
【0004】
一つの制約として、ナビゲーションシステムのディスプレイ上に、読み取り可能に表示されるアイコンの数がある。より具体的には、運転者が、都会のような人口稠密な都市圏を運転しているとすると、そのような都会では、ほぼ交通信号機毎に、交通カメラ画像が利用可能となる。与えられた交通カメラ画像のどれかを選択することは、ナビゲーションシステムのディスプレイ上で、アイコンを選択することを意味するが、そのディスプレイは、交通カメラ画像のアイコンのみでなく、“興味のある場所(point of interest)”のアイコンや“建物(building)”のアイコンなどの他のアイコンによって非常に混み合ったものとなる。
【0005】
従って、必要とされるものは、アイコンでナビゲーションシステムのディスプレイが過密となることを避けるべく、交通カメラ画像を選択的にナビゲーションシステムのディスプレイ上に表示するためのシステム及び方法である。
【課題を解決するための手段】
【0006】
このセクションでは、本発明の概要を述べる。すなわち、本発明の最大限の範囲を網羅的に開示したものではない。方法の発明の各ステップは、記載された順序に従って実行されても良いし、記載された順序からずれた順序で実行されても良い。
【0007】
車両内のディスプレイに、交通カメラによる道路の画像を表示する方法は、車両の挙動をモニタリングし、車両の挙動に基づいて交通事象の存在を判定し、交通カメラによる道路の画像を受信し、交通事象が検出された場合に、その交通カメラ画像をディスプレイに表示することを含むものである。
【0008】
さらに、交通カメラ画像を表示する方法は、車両の挙動と、メモリに格納された運転データのような予め記録された運転データとの比較に基づいて、交通事象の存在を判定することを含む。
【0009】
また、交通カメラ画像を表示する方法は、車両の挙動として、例えば車両速度をモニタリングするなど、車両をモニタリングすることを含む。そして、予め記録された運転データは、道路に対応付けられた運転速度データを含み、交通カメラ画像を表示する方法は、車両速度が、予め記録された運転速度データよりも低いかどうかに基づいて、交通事象の存在を判定することを含むものであっても良い。
【0010】
また、予め記録された運転データは、道路に対応付けられた公示速度を含むものであっても良い。そして、交通カメラ画像を表示する方法は、車両速度が、所定の期間、公示速度よりも低いかどうかに基づいて、交通事象の存在を判定することを含む。
【0011】
道路に対応付けられる予め記録された速度は、時刻及び日付の少なくとも一方に基づいて決定されても良い。さらに、道路に対応付けられる予め記録された速度は、道路の分類によって決定されても良い。
【0012】
他の例において、車両の挙動は、車両のブレーキ操作を含むことができる。交通カメラ画像を表示する方法は、少なくとも所定期間の間、車両ブレーキがかけられたかどうかに基づいて、交通事象の存在を判定することを含む。
【0013】
さらに続けると、交通カメラ画像を表示する方法は、車両が、その車両が接近している交通信号機から所定距離になったかを判定することを含むものであっても良い。交通カメラ画像を表示する方法は、さらに、車両が、接近している交通信号機から所定距離内にいる場合に所定時間待機し、その後、再び、車両が交通信号機から所定距離内にいるかを判定し、それにより、車両が走行する道路上に交通事象が存在するかどうかを判定することを含むものであっても良い。
【0014】
また、交通カメラ画像を表示する方法は、車両の前方の道路に存在する交通カメラを選択するステップを含むものであっても良い。別の例において、方法は、ナビゲーションシステムによって与えられた案内経路上に存在する交通カメラを選択するステップを含むものであっても良い。さらに、選択するステップは、車両に最も近い交通カメラを選択すること、あるいは、複数のカメラを選択することを含むものであっても良い。
【0015】
また、交通カメラ画像を表示する方法は、ディスプレイ上に、選択されたカメラの位置を示す地図とともに交通カメラ画像を表示することを含むものであっても良い。
【0016】
車両用交通カメラ画像表示システムは、車両の挙動をモニタリングするモニタリング手段と、交通事象の存在を検出する電気的なコンピューティングシステムと、その交通事象と関連する交通カメラ画像を受信する受信手段と、車両内に配置され、交通カメラ画像を表示する表示部とを備える。電気的なコンピューティングシステムは、車両の挙動に基づいて交通事象の存在を検出することができ、表示部は、電気的なコンピューティングシステムによって交通事象が検出されたときに、交通カメラ画像を表示する。さらに、電気的なコンピューティングシステムは、車両の挙動に基づいて、車両の制動期間を計算し、その制動期間が所定時間よりも長い場合に、交通事象を検出することもできる。
【0017】
また、交通カメラ画像表示システムは、各々の道路分類に対する基準速度データを記憶した速度データベースを備えていても良い。電気的なコンピューティングシステムは、車両が走行している道路の等級を決定し、車両の挙動に基づいて当該車両の速度を算出する。そして、電気的なコンピューティングシステムは、車両の速度が、その道路分類の基準速度データよりも低ければ、交通事象の存在を検出するようにしても良い。さらに、車両用表示システムが、車両の挙動をモニタリングするモニタリング手段と、車両の挙動に基づいて交通事象の存在を判定する判定手段と、道路上の交通カメラから画像を受信する受信手段と、本明細書に記載された方式で、交通カメラ画像に従いカメラ画像を表示する表示手段とを備えるようにしても良い。
【0018】
本願発明が適用できる更なる範囲が、以下の説明から明らかになる。この「発明の概要」における記載及び特定の例示内容は、説明の目的のみを意図したものであり、本願発明の範囲を限定するものではない。
【0019】
また、本願において開示される図面は、可能な全ての実施形態ではなく、厳選された実施形態を説明することを目的とするもので、本願発明の保護範囲を限定する意図を有するものではない。
【図面の簡単な説明】
【0020】
【図1】ナビゲーションシステムの配置を示す車両の室内を表した斜視図である。
【図2】実施形態における、車両用ナビゲーションシステムの制御方法を示すフローチャートである。
【図3】信号機に接近するにつれて、速度を低下させ、そして停止する車両の状況を示す図である。
【図4】信号機を中心とする所定半径外の車両を示す図である。
【図5】信号機を中心とする所定判定内の車両を示す図である。
【図6】交通事象、建物、目盛りなどを示す、例示としての表示画面の画像を示す図である。
【図7】運転者の速度行動データベースを示すテーブルである。
【図8】工場出荷時のデフォルト速度データベースを示すテーブルである。
【図9】実施形態における、データベースを選択するための方法を示すフローチャートである。
【図10】学習下限値からはずれ値を除外するために用いられる釣鐘状の曲線の例を示すグラフである。
【図11】実施形態において、ドライバーの行動の学習方法を示すフローチャートである。
【図12】サンプリング速度と、そのサンプリング速度を用いた学習下限値の計算の一例を示すグラフである。
【発明を実施するための形態】
【0021】
以下の実施形態の説明で参照する図面において、共通の参照番号は、同じ部品を示している。
【0022】
添付図面の図1〜図12を参照して、本発明の実施形態が詳細に説明される。図1は、工場で据え付けられたナビゲーションシステム12を備えた車両の室内の様子を示している。しかしながら、本発明は、持ち運び可能であり、車両のフロントガラスの内側面などに簡単に着脱することができる市販のナビゲーションシステムを除外するものではない。
【0023】
ナビゲーションシステム12は、ディスプレイ14及びボタン16を有し、それらはナビゲーションシステム12の機能を操作するために用いられる。また、ディスプレイ14はタッチディスプレイであっても良く、この場合、ナビゲーションシステム12の機能を操作するために、ディスプレイ14が指で直接タッチされる。ディスプレイ14におけるタッチディスプレイの機能は、ナビゲーションシステム12のオペレーティングソフトウェアと共同して動作する。ナビゲーションシステム12のオペレーティングソフトウェアは、ナビゲーションシステム12の電気的なコンピューティングシステムによって実行される。そのような電気的なコンピューティングシステムは、車両に取り付けられた電気的なコンピューティングユニットと、外部のリモートサーバーとから構成することができる。この実施形態においては、オペレーティングソフトウェアは、車両の電気的なコンピューティングユニットによって実行されるが、他の実施形態では、処理の一部又は全部を車両外において実行することも可能である。
【0024】
図2を参照して、ナビゲーションシステム12のようなナビゲーションシステムを制御する方法としての処理ロジックを示すフローチャートについて説明する。ブロック20におけるロジックの開始に続いて、処理ロジック18は、ブロック22に進み、ナビゲーションシステム12の制御モジュール24が、例えば、車両速度及び外部サーバを介して外部の交通データをモニタする。なお、本実施形態では、ナビゲーションシステム12と直接結合され、通信を行う制御モジュール24を用いる例について説明するが、ナビゲーションシステム12にデータを供給したり、他の機能を実行したり、特定の機能に特化した追加の制御モジュールが用いられても良い。
【0025】
ブロック22と関連づけられた機能に続いて、車両10の運転者が車両を走行させる速度が、車両が走行している道路の種別と対応付けてモニタされる。例えば、車両10の速度は制御モジュール24によってモニタされ、その制御モジュール24は、車両のスピードメーター、車両の速度を受信するエンジン制御モジュール、同じく車両速度を受信するトランスミッション制御モジュール、あるいは、例えばGPSを備えた携帯型のナビゲーションシステムなどの車両の速度をモニタする他の車両装置に直接連結されている。
【0026】
道路の分類に関して、ナビゲーションシステムの地図データを提供している会社が、走行する道路を選択する際に運転者に役立つようにするため、及びどの種別の道路が利用可能であるかを運転者に知らせるために、道路を分類する。例えば、4レーン若しくは6レーンの出入り口が制限されたハイウェイは、道路種別“L1”として分類される。例えばビジネス地区において、多様なアクセスが可能な道路のような、出入り口が制限されていない4レーンの道路は、道路種別“L2”として分類される。郊外地域の2レーンの道路(すなわち、各々の方向に1レーンずつ)は“L3”として分類され、居住地域の通りは“L4”として分類され、地方の田舎道は“L5”として分類される。
【0027】
交通データや情報を収集する際に、種々の方法やデバイスが使用可能である。例えば、道路下に設置されたセンサが、どのぐらいの頻度でそのセンサ上を走行する車両を検知したかに基づいて、交通状況を送信するようにしても良い。あるいは、単位時間当たりの車両の数が、閾値に対応する車両の数よりも多いことを検知したとき、交通渋滞のような交通事象の発生を知らせるようにしても良い。一方、単位時間当たりの車両の数が、閾値に対応する車両の数よりも少ないことを検知したときには、交通渋滞のような交通事象の発生を知らせることはない。別の例として、交通データは、交通の状況に関する交通情報を提供するために予め規定された道路を運転される“ライブフィールド車両”によって収集されても良い。さらに、パーソナルナビゲーション装置(“PND”)や携帯電話からのプローブデータが、交通データとして収集されても良い。GPS位置と一緒に、そのような交通データ収集手法を用いることにより、1台以上の車両の位置及び速度を、例えば、初めに交通データを受信する周囲の通信タワーから、中央監視センターへ与えることができる。中央監視センターは、NavTEQ,TeleAtlas,INRIXなどであり、送信手法として、XM radio又はHD radioのようなサービスを用いて、端末装置(車両)に対して交通メッセージチャンネル(“TMC”)上で交通データを一斉に放送すれば良い。そのような交通データの供給は、例として、FM周波数の形態でHD radioにより行なわれたり、衛星信号として、XMから行なわれたりする。
【0028】
ブロック22について図3を参照して説明を続けると、車両の挙動をモニタリングする手段、あるいは車両における操作をモニタリングする手段である、制御モジュール24が、車両の速度行動のような車両挙動又は操作をモニタリングするとき、外部交通データも同じくモニタリングされる。より具体的には、外部交通データは、特定の時間間隔でダウンロードされ、取り込まれた交通データのような交通情報から、制御モジュール24によって最新情報が受け取られたり、あるいは実況情報(例えば、ビデオ)を介して制御モジュール24に与えられたりする。交通データは、オフィスビル28に居を構える交通データ収集会社によって管理されているサーバ26から供給されるもので、例えば実時間ビデオカメラから取得されたものである。交通情報は、無線又は有線にて、カメラ又は交通信号30(例えば、交通信号灯)からサーバ26に送信される。サーバ26は、その交通情報を車両10の制御モジュール24に通信し、それにより、交通情報は、運転者や乗員によって要求された場合に、ディスプレイ14に表示される。交通情報は、車両10が動いている間は、継続的に更新される。
【0029】
図2について説明を続けると、本実施形態では、ブロック22に続いて、制御ロジックが判定ブロック32に進み、そこにおいて、制御モジュール24は、少なくとも例えば4秒程度の所定の時間、ブレーキペダル34に力がかけられ、踏み込まれたか判定するために、車両のブレーキペダル34をモニタリングすることにより、車両のブレーキシステムを継続的にモニタする(つまり、車両の挙動あるいは操作が継続的にモニタされる)。ただし、所定の時間は、いかなる所定時間であっても良い。ブレーキペダル34が、少なくとも所定の時間、踏み込まれていないならば、ロジックはブロック36に進む。ブロック36では、ロジックは、車両速度が、例えば10秒間のような所定時間の間、公示速度よりも低いかを尋ねる。公示速度は、予め記録された運転データとして記憶されている。本実施形態においては、公示速度は、工場出荷時のデフォルト速度データベース、もしくは運転者の速度行動データベースに記憶される。道路に対応付けられる公示速度が、時刻や日付に基づいて決定されても良い。また、道路に対応付けられる公示速度は、道路分類によって決定されても良い(すなわち、本実施形態においては、“道路に対応付けられる公示速度”との用語は、対象となる同じ道路そのものにおける公示速度を意味するのではなく、同じ道路分類における公示速度を意味するのである。)。
【0030】
ブロック36の質問に対する応答が“NO”であった場合、ロジックはブロック38に進み、何らかの外部データ、車車間通信データ、又は交通情報があるかを尋ねる。質問ブロック38における応答が“NO”であると、ロジックはブロック22に戻り、再び各ブロックの処理を開始する。一方、ブロック38での質問の応答が“YES”である場合には、ロジックはブロック40に進み、ロジックは、車両が走行している道路の前方に交通事象が存在すると決定する。制御モジュール24によって動作され、交通事象に関連する交通カメラ画像を受信する手段であるロジックは、ブロック42に進み、そこで、車両10の前方に交通カメラがあるかどうかを尋ねる。カメラが車両10の前方、あるいは車両10が走行している道路の近傍に存在するならば(すなわち、交通カメラは、ナビゲーションシステム12によって与えられた案内経路上に存在するか、もしくは車両10の前方の案内経路から、例えば2ブロック程度の所定距離範囲内に存在するならば)、ロジックはブロック44に進む。そこにおいて、交通カメラ画像を受信する手段であり、かつ交通カメラ画像を表示する手段である、制御モジュール24は、カメラ画像を受信し、車両10内のナビゲーションシステム12のディスプレイ14に表示する。この際、ロジックは、車両10の前方の道路に存在する交通カメラを選択するステップを含んでも良い。他の例においては、ロジックは、ナビゲーションシステム12によって与えられた、案内経路上に存在する交通カメラを選択するステップを含んでいても良い。さらに、ロジックは、車両から最も近い交通カメラを選択しても良いし、もしくは複数のカメラを選択しても良い。また、ロジックは、選択されたカメラの位置を示す地図と一緒に、カメラ画像をディスプレイに表示しても良い。
【0031】
しかしながら、交通カメラが存在しない場合、上述したように、ロジックはブロック22に戻り、その後、ブロック32に進む。このとき、ブレーキペダル34に、少なくとも所定時間の間、継続的に力が加えられており、ブロック32における質問に対する応答が“YES”になると、ロジックはブロック46に進む。そこにおいて、ロジックは、車両10が、接近しつつある交通信号から所定距離範囲内であるかどうかを尋ねる。ブロック46における質問の結果が“NO”である場合、ロジックは質問ブロック36に進む。しかしながら、質問ブロック46の結果が“YES”であると、ロジックはブロック48に進んで所定時間だけ待機し、その後、ロジックは質問ブロック50に進む。そこにおいて、ロジックは、再び、車両10が、接近しつつある交通信号から所定距離範囲内であるかどうかを尋ねる。ブロック50における質問の結果が“NO”であると、ロジックはブロック22に戻る。一方、ブロック50における質問の結果が“YES”であると、ロジックはブロック40に進み、車両が走行している道路上の前方に交通事象が発生していると決定し、その後、質問ブロック42において、前方に交通カメラが存在しているかどうかを尋ねる。このとき、交通カメラが存在しているならば、ロジックはブロック44に進み、ナビゲーションシステム12が車両10の前方の交通カメラ画像を表示する。一方、車両10の前方にカメラは存在しないならば、ロジックは再びブロック22に戻る。
【0032】
質問ブロック36に関して、質問の結果が“YES”であったならば、そのとき、ロジックは質問ブロック52に進む。そこにおいて、ロジックは、運転者が通常よりも遅い速度で運転しているか尋ねる。運転者が通常よりも遅い速度で運転しているか否かのチェックは、交通事象の存在を判定する手段であり、かつ制御モジュール24によって行なわれる。制御モジュール24は、現在の運転者及び/又は現在の車両速度をチェックし、それを運転者の速度行動データベースと比較する。運転者の速度行動データベースは、車両が使用される間に取得され記録された、事前に記録された運転データ(つまり、基準速度データとして使用される通常の速度データ)を有する。道路に対応づけられた運転者の速度行動は、時刻と日付の少なくとも一方に基づいて決定されても良い。つまり、運転データを時刻や日付により分類して記憶しておき、過去の同じ時刻帯や日付の運転データを抽出したりしても良い。また、道路に対応付けられた運転者の速度行動は、道路分類によって決定されても良い(すなわち、本実施形態においては、“道路に対応付けられる運転者の速度行動”との言葉は、対象となる同じ道路そのものにおける運転者の速度行動を意味するのではなく、同じ道路分類における運転者の速度行動を意味する。)。
【0033】
車両の挙動に基づいて交通事象の存在を判定することは、車両の操作に基づいて交通事象を予測することを含む。交通事象の例には、道路上で停止している交通(車両)や、公示制限速度又は他の所定速度よりも遅い速度で前方を移動している車両などを含む。車両の操作の例には、ブレーキペダルを踏み込むことを含む。
【0034】
図3を参照すると、交通信号に接近しつつある車両10のシナリオが描かれている。より詳細に説明すると、図3は、車両10が交通信号30から所定半径、つまり所定距離54の範囲外であるときには、通常の速度、又は公示制限速度のような一定の速度で走行する車両10を示している。図3はまた、交通信号30から所定半径、つまり所定距離54の範囲内を移動する車両10も示している。交通信号30から所定半径、つまり所定距離54の範囲内に進入する地点において、車両10は、交通信号30によって表示される黄色信号又は赤信号のために、減速して、よりゆっくりとした速度での移動を開始する。
【0035】
図4は、図3のシナリオにおける可能性のある変化をさらに説明するために用いられるものであり、交通信号30から所定距離54の範囲内ではなく、むしろかなり離れている車両10を示している。しかしながら、図4に示される位置においてさえ、車両は減速を開始し、よりゆっくりとした速度での移動を開始するかもしれない。そのような状況において、制御モジュール24は、1つ以上の特定の“トリガ”又は警告によって、起こりうる交通状態について気付き、知らされることになる。可能性がある警告は、車両速度又は車両の制動である。これは、前方に存在する交通状態が、単に、例えば赤信号のために車両が速度を低下した結果ではなく、起こりうる交通上の障害が、道路の前方に存在していることを示す。この場合、車両10が交通信号30から所定距離54の範囲外であるので、制御モジュール24は、前方に存在する交通状態が、図3に示されるような交通信号の結果ではないことを理解する。トリガとしての車両の制動は、制動時間であり、それは、ブレーキペダル34に力が加えられ、ブレーキペダル34が踏み込まれた時間の長さである。
【0036】
図5は、車両10が、交通信号30から処理距離54の範囲内にいるときのシナリオを示しており、ロジックは、車両速度やブレーキペダル34が踏み込まれた時間のようなトリガの1つによって、起こりうる交通状態を知らされる。ただし、図5に示されるシナリオにおいて、車両10が、単に信号30における赤信号のために停止したのか、それとも何らかの他の交通状態が存在するのかは分かっていない。それゆえ、ロジックは、交通信号30から所定半径54によって囲まれる範囲内にて費やした、あるいは留まっている時間をモニタする。もし、車両10が所定時間以上(例えば、120秒つまり2分間)、そのようなエリア内に留まっているならば、それは、車両10が単に交通信号30が赤から青に変わることを待っているのではなく、むしろ交通上の障害が、車両10が走行している道路56の前方に存在する可能性があることを意味する。交通信号は、停止を意味する赤信号から、発進を意味する青信号に、120秒よりも少ない時間以内に変化するものと思われる。しかしながら、そのような、120秒の所定時間は、交通信号30が動作するかもしれないいかなる所定時間に変更されても良い。
【0037】
図6は、ナビゲーションシステムのディスプレイであって、外部交通データである種々の交通事象58,60,62の例を図示している、ディスプレイ14の拡大画像である。交通事象は、車両の速度低下又は停止を含み、所定の道路において交通の流れを公示制限速度よりも遅くさせる、車両の衝突、パレード、コンサート、スポーツイベント、降雨、降雪、あるいは他の気候的な出来事などによって引き起こされる。そして、図2のフローチャート18の各ステップでの、質問及びそれに対する結果から、位置64に居る車両の運転者は、ブレーキ34をかけること、又は道路66の公示制限速度以下で運転することによってディスプレイ14上で交通事象58を見ることができる。交通事象58の映像は、交通事象58の視認距離内に配置された、カメラ68によってディスプレイ14に提供される。さらなる例として、カメラ70は、都市内の異なる位置における交通事象60を映し出し、カメラ72は交通事象62を映し出す。
【0038】
図7から図12は、運転者の速度行動データベースの構築方法を説明するためのものである。図7は、運転者の速度行動データベースである、「学習値テーブル」を示している。この「学習値テーブル」は、車両内又は外部のサーバに記憶される。「学習値テーブル」は、複数の欄を持ち、そこに、「運転者ナンバー」、「道路分類」、「学習目標値」、「学習下限値」、及び「学習完了フラグ」などの複数のパラメータを保持する。すなわち、「学習値テーブル」において、第1欄は少なくとも1つの「運転者ナンバー」を保持し、第2欄は少なくとも1つの「道路分類」を保持し、第3欄は少なくとも1つの「公示制限速度」を保持し、第4欄は少なくとも1つの「学習目標値」を保持し、第5欄は少なくとも1つの「学習下限値」を保持し、及び第6欄は少なくとも1つの「学習完了フラグ」を保持する。運転者ナンバーは、個々の運転者を表す。本実施形態において、個々の運転者の認識は、電子キーのコード、運転者の体重、シートポジション、指紋、声紋、瞳の虹彩、静脈認証、又は運転者の顔認証の中の1つ以上によって実現される。
【0039】
上述したように、道路分類は、私道、市道、一般国道、州間高速道路など、道路のグループを表すものである。本実施形態では、道路分類として、幹線分類コードを用いる。幹線分類コードは、ACC1:北米大陸全州間高速道路、ACC2:大都市圏間高速道路、ACC3:州間高速道路、ACC4:都市/郊外/地方道路、及びACC5:街路である。「道路分類」は、また、ある特定の道路区分を表すものであっても良い。さらに、他の分類が、幹線分類コードに代えて、「道路分類」として使用されても良い。一つの実施形態において、「I696W 1600 1900」は、「州間高速道路696号線西行き 16時から19時」を表す。そのような、ある特定の道路区分の分類において、システムは、通常、頻繁に交通渋滞が発生するポイントにおいて、交通カメラ画像が表示されることを回避するようにしても良い。
【0040】
「学習目標値」は、学習下限値と統計的な釣鐘状の曲線とに基づいて算出された、道路における運転者の通常の運転速度を表すものである。学習下限値は、各々の道路における、サンプリングされた運転者の実際の平均運転速度を示すものである。学習完了フラグは、学習目標値が、該当する道路分類に対して算出されたか否かに対する、肯定的又は否定的な応答を示すものである。この実施形態では、学習官僚フラグのデフォルト値は「0」である。
【0041】
図8は、車両のナビゲーションシステムにプリインストールされたり、外部サーバに格納されたりする、工場出荷時のデフォルト速度データベースである、「デフォルト工場値テーブル」を示している。第1欄は、「道路分類」を含んでいる。第2欄は、「公示制限速度」を含んでいる。第3欄は、「目標値」を含んでいる。
【0042】
図9は、運転者の通常の運転速度を決定するために、いずれのデータベースが使用されるべきかを決定するためのフローチャートを示している。処理は、ブロック901からスタートし、ブロック902に進んで、現在の道路分類を認識する。道路分類の認識は、少なくとも車両のGPS装置と、ナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。そして、処理はブロック903に進み、現在の道路分類が、道路分類の認識に関して、前回の結果から変化したか否かを判定する。現在の道路分類が変化していないならば、処理はブロック901に戻る。一方、現在の道路分類が変化している場合、又は車両のイグニッションスイッチがまさに投入されたところである場合には、処理はブロック904に進む。そして、ブロック904において、認識された道路分類に対応する「学習完了フラグ」が1であるか否かを判定する(すなわち、認識された道路分類に対応する「学習完了フラグ」が、デフォルト値から変化されたかを判定する)。「学習完了フラグ」が1である場合、処理はブロック905に進む。一方、「学習完了フラグ」が1ではない場合、処理はブロック912に進む。
【0043】
ブロック905では、図7に示される学習値テーブルより、「学習下限値(0)」から「学習下限値(m)」までを読み込む。このように複数の学習下限値がある。パラメータ「m」は、各々の「学習下限値」を特定するために用いられる。そして、処理はブロック906に進み、該当する道路分類に対する「学習下限値(0)」から「学習下限値(m)」に基づいて、釣鐘状の曲線を計算する。そして、処理はブロック907に進む。ブロック907では、計算された釣鐘状の曲線を用いて、はずれ値を定義する。そして、「学習下限値(0)」から「学習下限値(m)」までから、はずれ値を除外する(釣鐘状の曲線の例が、図10に示されている)。処理は、ブロック908に進み、はずれ値を除外した、「学習下限値(0)」から「学習下限値(m)」までの平均値の計算を実行する。そして、ブロック909に進んで、「学習下限値(0)」から「学習下限値(m)」の計算された平均値を、道路分類の「学習目標値」として保存する。処理はブロック910に進み、図2のブロック52において運転者の通常の運転速度の値として、計算された「学習目標値」を使用するようにし、ブロック911を介してブロック901に戻る。
【0044】
ブロック912では、カウンター「m」が、所定値「x」よりも大きいかどうかを判定し、カウンター「m」が「x」より大きくない場合、ブロック913に進む。一方、カウンター「m」が「x」より大きい場合、処理はブロック915に進む。この実施形態では、「x」は4である。ブロック913では、「デフォルト工場値テーブル」から該当する道路分類の「目標値」を読み込み、ブロック914に進む。このブロック914では、処理は、図2のブロック52において運転者の通常の運転速度の値として「目標値」を使用するようにし、ブロック901に戻る。ブロック915では、「学習完了フラグ」を1に設定し、その後、ブロック905に進む。
【0045】
図11は、「学習下限値」を記憶する手法に関するフローチャートを示している。処理は、ブロック1101からスタートし、ブロック1102において、現在の道路分類の認識を実行する。図9に示すフローチャートと同様に、道路分類の認識は、少なくとも車両のGPS装置とナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。次に、ブロック1103において、現在の道路分類が、最新の(つまり、以前の)道路分類認識から変化したか否かを判定する。現在の道路分類が変化していなければ、処理はブロック1101に戻る。現在の道路分類が変化している場合、又は車両のイグニッションスイッチがまさに投入されたところである場合には、処理はブロック1104に進む。ブロック1104では、「x」秒間、カウントを行って待機する。この実施形態では、「x」は、10秒間である。「x」秒間カウントした後、処理はブロック1105に進む。ブロック1105では、カウンター「n」を0にセットし、ブロック1106に進む。ブロック1106では、車両速度センサ又はGPS装置によって、車両の現在の速度が検出される。そして、処理はブロック1107に進み、検出された現在の速度を「速度(n)」として記憶する。処理は、ブロック1108に進み、今度は「y」秒間、カウントを行って待機する。本実施形態では、「y」は1秒間である。「y」秒間カウントした後、処理はブロック1109に進む。ブロック1109では、現在の道路分類が認識される。ブロック1102と同様に、道路分類の認識は、少なくとも車両のGPS装置とナビゲーションシステム又は外部サーバに格納された地図データとに基づいて実行される。
【0046】
続くブロック1110において、現在の道路分類が、ブロック1102にて認識された道路分類から変化していないか判定される。現在の道路分類が変化していない場合には、処理はブロック1111に進む。一方、現在の道路分類が変化した場合には、処理はブロック1104に進む。ブロック1111では、カウンター「n」が1だけインクリメントされる。そして、処理はブロック1112に進み、再度、車両の現在の速度の検出が行なわれる。ブロック113では、検出された現在の車速が「速度(n)」としてメモリに記憶される。ブロック1114では、「速度(n)」と「速度(n−1)」との速度差が計算される。処理はブロック1115に進み、その速度差は、所定値「z」以下であるかの判定が行なわれる。速度差が所定値「z」よりも大きければ、処理はブロック1105に進む。この実施形態では、所定値「z」は2である。ブロック1116において、カウンター「n」が所定値「p」以上であるかの判定が行なわれる。「n」が所定値「p」以上であれば、処理はブロック1117に進む。「n」が所定値「p」より小さければ、処理はブロック1108に進む。この実施形態において、所定値「p」は5である。ブロック1117において、速度(0)から速度(p)までの平均速度が計算される。ブロック1118に進んで、計算された平均速度が、「学習下限値(m)」として保存される。処理はブロック1119に進み、「m」がインクリメントされる。そして、処理はブロック1120を介して、ブロック1101に戻る。「m」の工場出荷時のデフォルト値は0である。この実施形態では、個々の運転者を認識することによって、速度行動データベースは、各運転者に対して個別に学習下限値を記憶する。それにより、本実施形態では、システムが、個々の運転者の通常の運転速度を計算することができ、不要な交通カメラ画像がポップアップ表示されることを回避することができる。
【0047】
図12は、「学習下限値」がどのように計算されるかの例を示したグラフである。水平軸は、車両が新しい道路分類の道路を走行している経過時間を表している。垂直軸は、車両速度を表している。このグラフの原点は、システムが道路分類の変化を認識した時点を表している。その例に示されるように、初期の期間において、車両の速度は徐々に増加している。本実施形態では、システムは、道路分類の変化後10秒経過すると、車両速度のサンプリングを開始する。また、システムは毎秒ごとに速度差の計算を開始する。速度差が、5秒間の間、毎時2マイル以内に落ち着いているならば(6個の速度データある)、システムは、その6個の速度データの平均速度を計算する。図12に示す例では、6個の速度データは、43、44,45,46,46.5であり、平均速度は毎時45マイルとなる。この平均速度は「学習下限値(m)」としてシステムに記憶される。
【0048】
実施形態に関する前述の記載は、発明の説明の目的のために提供されたものであり、発明を完全に網羅したり、発明を制限したりすることを意図するものでもない。特定の実施形態及び/又は方法における個々の特徴事項は、その特定の実施形態に対して限定されるものではなく、互換性のあるものであり、特別な記載がなくとも、適当な実施形態において利用可能なものである。また、それらは色々な方法において変形されることも可能である。そのような変形は、本願発明から逸脱するものとみなされず、全ての変形例は本発明の範囲に含まれるものであることを意図している。
【0049】
具体的な細部は必ずしも採用される必要はなく、実施形態が色々な形で具体化され、また本願発明の範囲を限定するものと解釈されるべきものではないことについて、当該技術分野の技術者にとって明らかなことである。実施形態の説明においては、周知のプロセス、周知の装置構造、及び周知の技術については、詳細に記載していない。
【0050】
さらに、ここに説明された方法における工程、処理、および操作は、それらの実行順序が具体的に特定されている場合を除いて、ここに説明され、図示された特定の順序でのそれらの実行が必ず要求されるものとしては解釈されるべきではない。さらに、追加的な、または代替的な工程を採用することができることも理解されるべきである。
【符号の説明】
【0051】
10 車両
12 ナビゲーションシステム
14 ディスプレイ
24 制御モジュール
34 ブレーキペダル
【特許請求の範囲】
【請求項1】
車両内のディスプレイに、交通カメラによる道路の画像を表示する方法であって、
前記車両の挙動をモニタリングし、
前記車両の挙動に基づいて交通事象の存在を判定し、
前記交通カメラによる道路の画像を受信し、
前記交通事象が存在する場合に、その交通カメラの画像をディスプレイに表示することを特徴とする交通カメラ画像を表示する方法。
【請求項2】
前記交通事象の存在は、前記車両の挙動と、予め記録された運転データとの比較に基づいて、判定されることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項3】
前記車両の挙動は、道路上における車両の速度を含み、
予め記憶された運転データは、前記道路に対応付けられ、予め記録された速度を含み、
車両速度が、予め記録された速度よりも低い場合に、前記交通事象の存在が判定されることを特徴とする請求項2に記載の交通カメラ画像を表示する方法。
【請求項4】
前記道路に対応付けられ、予め記録された速度は、時刻及び日付の少なくとも一方に基づいて決定されることを特徴とする請求項3に記載の交通カメラ画像を表示する方法。
【請求項5】
前記道路に対応付けられ、予め記録された速度は、道路分類によって決定されることを特徴とする請求項3に記載の交通カメラ画像を表示する方法。
【請求項6】
前記車両の挙動は、道路上における車両の速度を含み、
予め記録された運転データは、前記道路に対応付けられた公示速度を含み、
車両速度が、所定時間の間、前記公示速度よりも低い場合に、前記交通事象の存在が判定されることを特徴とする請求項2に記載の交通カメラ画像を表示する方法。
【請求項7】
前記道路に対応付けられた公示速度は、道路分類によって決定されることを特徴とする請求項6に記載の交通カメラ画像を表示する方法。
【請求項8】
前記車両の挙動は、前記車両のブレーキ操作を含み、
所定期間の間、前期車両のブレーキがかけられた場合に、前記交通事象の存在が判定されることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項9】
前記車両が、その車両が接近している交通信号から所定距離内となったかを判定し、
前記車両が、前記交通信号から所定距離内にいる場合に所定時間待機し、
再度、前記車両が前記交通信号から所定距離内にいるかを判定し、
前記車両が、依然として前記交通信号から所定距離内にいる場合に、前記車両が走行している道路上に前記交通状態が存在すると判定することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項10】
前記車両の前方の道路に存在する交通カメラを選択し、
前記交通事象が存在する場合に、選択されたカメラの画像をディスプレイに表示することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項11】
ナビゲーションシステムによって与えられる案内経路上に存在する、または前記車両の前方の案内経路から所定距離以内に存在する交通カメラを選択し、
前記交通事象が存在する場合に、選択されたカメラの画像をディスプレイに表示することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項12】
案内経路上に存在する交通カメラの選択は、前記車両に最も近い交通カメラを選択するものであることを特徴とする請求項11に記載の交通カメラ画像を表示する方法。
【請求項13】
案内経路上に存在する交通カメラの選択は、複数の交通カメラを選択するものであることを特徴とする請求項11に記載の交通カメラ画像を表示する方法。
【請求項14】
前記交通事象が存在する場合に、交通カメラの画像をディスプレイに表示することは、選択されたカメラの地理的な位置を示す地図とともに、カメラ画像を表示するものであることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項15】
車両の挙動をモニタリングするモニタリング手段と、
交通事象の存在を検出する電気的なコンピューティングシステムと、
前記交通事象と関連する交通カメラ画像を受信する受信手段と、
前記車両内に配置され、交通カメラ画像を表示する表示部と、を備え、
前記電気的なコンピューティングシステムは、前記車両の挙動に基づいて交通事象の存在を検出し、前記表示部は、前記電気的なコンピューティングシステムによって前記交通事象が検出されたときに、交通カメラ画像を表示することを特徴とする交通カメラ画像表示システム。
【請求項16】
前記電気的なコンピューティングシステムは、前記車両の挙動に基づいて、前記車両の制動期間を計算し、その制動期間が所定時間よりも長い場合に、前記交通事象を検出することを特徴とする請求項15に記載の交通カメラ画像表示システム
【請求項17】
各々の道路分類に対する基準速度データを記憶した運転速度データベースを備え、
前記電気的なコンピューティングシステムは、前記車両が走行している道路の分類を決定し、前期車両の挙動に基づいて当該車両の速度を算出し、そして、前記車両の速度が、道路分類の基準速度データよりも低ければ、前記交通事象の存在を検出することを特徴とする請求項15に記載の交通カメラ画像表示システム
【請求項18】
車両の挙動をモニタリングするモニタリング手段と、
前記車両の挙動に基づいて交通事象の存在を判定する判定手段と、
道路上の交通カメラによる複数の画像から少なくとも1つの画像を受信する受信手段と、
前記交通事象が検出された場合に、交通カメラ画像を表示する表示手段と、を備えたことを特徴とする交通カメラ画像表示システム。
【請求項19】
車両内のディスプレイに、道路の交通情報を表示する方法であって、
前記車両の操作をモニタリングし、
前記車両の操作に基づいて、交通事象の存在を予測し、
前記車両の前方のカメラから交通カメラ画像を受信し、
前記交通カメラ画像をディスプレイに表示することを特徴とする道路の交通情報を表示する方法。
【請求項20】
前記交通事象の存在の予測は、前期車両の挙動と、予め記録された運転データとの比較に基づいて、判定されるものであることを特徴とする請求項19に記載の交通情報を表示する方法。
【請求項1】
車両内のディスプレイに、交通カメラによる道路の画像を表示する方法であって、
前記車両の挙動をモニタリングし、
前記車両の挙動に基づいて交通事象の存在を判定し、
前記交通カメラによる道路の画像を受信し、
前記交通事象が存在する場合に、その交通カメラの画像をディスプレイに表示することを特徴とする交通カメラ画像を表示する方法。
【請求項2】
前記交通事象の存在は、前記車両の挙動と、予め記録された運転データとの比較に基づいて、判定されることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項3】
前記車両の挙動は、道路上における車両の速度を含み、
予め記憶された運転データは、前記道路に対応付けられ、予め記録された速度を含み、
車両速度が、予め記録された速度よりも低い場合に、前記交通事象の存在が判定されることを特徴とする請求項2に記載の交通カメラ画像を表示する方法。
【請求項4】
前記道路に対応付けられ、予め記録された速度は、時刻及び日付の少なくとも一方に基づいて決定されることを特徴とする請求項3に記載の交通カメラ画像を表示する方法。
【請求項5】
前記道路に対応付けられ、予め記録された速度は、道路分類によって決定されることを特徴とする請求項3に記載の交通カメラ画像を表示する方法。
【請求項6】
前記車両の挙動は、道路上における車両の速度を含み、
予め記録された運転データは、前記道路に対応付けられた公示速度を含み、
車両速度が、所定時間の間、前記公示速度よりも低い場合に、前記交通事象の存在が判定されることを特徴とする請求項2に記載の交通カメラ画像を表示する方法。
【請求項7】
前記道路に対応付けられた公示速度は、道路分類によって決定されることを特徴とする請求項6に記載の交通カメラ画像を表示する方法。
【請求項8】
前記車両の挙動は、前記車両のブレーキ操作を含み、
所定期間の間、前期車両のブレーキがかけられた場合に、前記交通事象の存在が判定されることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項9】
前記車両が、その車両が接近している交通信号から所定距離内となったかを判定し、
前記車両が、前記交通信号から所定距離内にいる場合に所定時間待機し、
再度、前記車両が前記交通信号から所定距離内にいるかを判定し、
前記車両が、依然として前記交通信号から所定距離内にいる場合に、前記車両が走行している道路上に前記交通状態が存在すると判定することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項10】
前記車両の前方の道路に存在する交通カメラを選択し、
前記交通事象が存在する場合に、選択されたカメラの画像をディスプレイに表示することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項11】
ナビゲーションシステムによって与えられる案内経路上に存在する、または前記車両の前方の案内経路から所定距離以内に存在する交通カメラを選択し、
前記交通事象が存在する場合に、選択されたカメラの画像をディスプレイに表示することを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項12】
案内経路上に存在する交通カメラの選択は、前記車両に最も近い交通カメラを選択するものであることを特徴とする請求項11に記載の交通カメラ画像を表示する方法。
【請求項13】
案内経路上に存在する交通カメラの選択は、複数の交通カメラを選択するものであることを特徴とする請求項11に記載の交通カメラ画像を表示する方法。
【請求項14】
前記交通事象が存在する場合に、交通カメラの画像をディスプレイに表示することは、選択されたカメラの地理的な位置を示す地図とともに、カメラ画像を表示するものであることを特徴とする請求項1に記載の交通カメラ画像を表示する方法。
【請求項15】
車両の挙動をモニタリングするモニタリング手段と、
交通事象の存在を検出する電気的なコンピューティングシステムと、
前記交通事象と関連する交通カメラ画像を受信する受信手段と、
前記車両内に配置され、交通カメラ画像を表示する表示部と、を備え、
前記電気的なコンピューティングシステムは、前記車両の挙動に基づいて交通事象の存在を検出し、前記表示部は、前記電気的なコンピューティングシステムによって前記交通事象が検出されたときに、交通カメラ画像を表示することを特徴とする交通カメラ画像表示システム。
【請求項16】
前記電気的なコンピューティングシステムは、前記車両の挙動に基づいて、前記車両の制動期間を計算し、その制動期間が所定時間よりも長い場合に、前記交通事象を検出することを特徴とする請求項15に記載の交通カメラ画像表示システム
【請求項17】
各々の道路分類に対する基準速度データを記憶した運転速度データベースを備え、
前記電気的なコンピューティングシステムは、前記車両が走行している道路の分類を決定し、前期車両の挙動に基づいて当該車両の速度を算出し、そして、前記車両の速度が、道路分類の基準速度データよりも低ければ、前記交通事象の存在を検出することを特徴とする請求項15に記載の交通カメラ画像表示システム
【請求項18】
車両の挙動をモニタリングするモニタリング手段と、
前記車両の挙動に基づいて交通事象の存在を判定する判定手段と、
道路上の交通カメラによる複数の画像から少なくとも1つの画像を受信する受信手段と、
前記交通事象が検出された場合に、交通カメラ画像を表示する表示手段と、を備えたことを特徴とする交通カメラ画像表示システム。
【請求項19】
車両内のディスプレイに、道路の交通情報を表示する方法であって、
前記車両の操作をモニタリングし、
前記車両の操作に基づいて、交通事象の存在を予測し、
前記車両の前方のカメラから交通カメラ画像を受信し、
前記交通カメラ画像をディスプレイに表示することを特徴とする道路の交通情報を表示する方法。
【請求項20】
前記交通事象の存在の予測は、前期車両の挙動と、予め記録された運転データとの比較に基づいて、判定されるものであることを特徴とする請求項19に記載の交通情報を表示する方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−216090(P2011−216090A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2011−68287(P2011−68287)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(500164385)デンソー インターナショナル アメリカ インコーポレーテッド (49)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(500164385)デンソー インターナショナル アメリカ インコーポレーテッド (49)
【Fターム(参考)】
[ Back to top ]