
交通システムとこれに用いるコンピュータプログラム、並びに異常事象の判定処理装置

【課題】 他車両2Bとの関係で発生し得る事故の危険性を、自車両2Aの搭乗者に正確に報知できるようにする。
【解決手段】 本発明は、他車両2Bに生じた異常事象を自車両2Aの搭乗者に報知する交通システムに関する。このシステムは、他車両2Bの車両情報に基づいて、他車両2Bに関する異常事象の有無を判定する判定手段(車載コンピュータ31)と、判定手段による判定結果が異常事象ありの場合に、他車両2Bに異常事象が発生したことを自車両2Aの搭乗者に報知する報知手段(ディスプレイ36又はスピーカー37)と、を備える。
【解決手段】 本発明は、他車両2Bに生じた異常事象を自車両2Aの搭乗者に報知する交通システムに関する。このシステムは、他車両2Bの車両情報に基づいて、他車両2Bに関する異常事象の有無を判定する判定手段(車載コンピュータ31)と、判定手段による判定結果が異常事象ありの場合に、他車両2Bに異常事象が発生したことを自車両2Aの搭乗者に報知する報知手段(ディスプレイ36又はスピーカー37)と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、他車両に生じた異常事象を自車両の搭乗者に報知する交通システムと、このシステムに用いるコンピュータプログラム、並びに異常事象の判定処理装置に関する。
【背景技術】
【0002】
自車両の進行方向の下流側に存在する道路障害や、自車両の近隣の他車両が遭遇した交通事故などの、走行中に生じた異常事象を短時間(数秒以内)で検知する方策は、現状では、ドライバーの視覚と聴覚に依存するところが大きい。
また、近年、人身事故を防止するため、夜間の歩行者の検知を目的とした車載カメラ型の人センサ等が一部で実用化されているが、これ以外の異常検出手段は未だ実用化されていない。
【0003】
そこで、ドライバーの安全運転支援の目的から、現在位置や速度などを含む車両情報(プローブ情報)を車車間通信によって近隣の車両間で交換し、他車両の現在位置を自車両のディスプレイに表示したり、自車両に接近しつつある他車両を検出した場合に衝突の危険性をドライバーに通報したりする、車車間通信を利用した交通安全のための交通システムが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−182207号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載の交通システムでは、他車両が自車両に接近しつつある場合に両者の衝突の危険性を予測する方法であり、他車両が異常な走行を行っているか否かを判定していない。
このため、他車両が比較的安全な挙動である場合でも、自車両のドライバーに衝突の危険性が通報されてしまい、ドライバーに誤った通報がされ易いという欠点がある。
【0006】
本発明は、かかる従来の問題点に鑑み、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知できる交通システム等を提供することを目的とする。
また、車両同士が直接的に通信しない場合であっても、ある車両との関係で発生し得る事故の危険性を別の車両の搭乗者等に正確に報知できる異常事象の判定処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1) 道路上を走行する車両のドライバーは、前方の危険を察知した場合、急ブレーキをかけるか又は急ハンドルを切るなどの通常と大きく異なる動作をする。すなわち、事故に直面する車両には、短時間の間に進行方向に向かった大きな減速が発生したり、進行方向から大きく異なる方向への方向変化が発生したりする。
【0008】
また、実際に車両が事故を起こす(或いは、巻き込まれる)場合も、短時間の間に、急減速や進行方向から大きく異なる方向への方向変化が発生してから、突然に停止して更に進行方向の変化が発生する。
更に、ドライバーが危険を察知せずに事故を起こす場合には、車両には、突然の停止や進行方向の変化が発生し、場合によってはエンジンや電源が急に停止する。本発明の交通システムは、これらの経験則を踏まえて創出されたものである。
【0009】
すなわち、本発明の第1の観点に係る交通システムは、他車両に生じた異常事象を自車両の搭乗者に報知する交通システムであって、前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定する判定手段と、前記判定手段の判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知する報知手段と、を備えていることを特徴とする。
【0010】
本発明の交通システムによれば、判定手段が、他車両の車両情報に基づいて、他車両に関する異常事象の有無を判定し、報知手段が、その判定結果が異常事象ありの場合に、他車両に異常事象が発生したことを自車両の搭乗者に報知するので、例えば、上記に例示したような、事故に繋がる可能性が高い異常事象が他車両に発生した場合に、その発生が自車両の搭乗者に報知される。
このため、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【0011】
(2) 本発明の交通システムは、前記他車両の車両情報又は前記異常事象ありの情報を、前記他車両から前記自車両に送信する車車間通信手段をさらに備えていることが好ましい。
【0012】
このような構成によって、車車間通信を介して他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【0013】
(3) 本発明の交通システムにおいて、具体的には、前記異常事象には、前記自車両から見て前記他車両の速度が異常に高速である異常高速走行を含めることができる。
この場合、前記判定手段が、前記他車両の速度から前記自車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも大きい場合に、前記異常高速走行があったと判定すれば、当該異常高速走行の発生を正確に判定することができる。
【0014】
(4) 本発明の交通システムにおいて、前記異常事象には、更に、前記自車両から見て前記他車両の速度が異常に低速である異常低速走行が含まれることが好ましい。
この場合、前記判定手段が、前記自車両の速度から前記他車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも小さい場合に、前記異常低速走行があったと判定すれば、当該異常低速走行の発生を正確に判定することができる。
【0015】
(5) 本発明の交通システムにおいて、前記異常事象には、前記他車両が異常に大きい加速度で急加速する異常速度上昇が含まれていてもよい。
この場合、前記判定手段が、前記他車両の絶対加速度が所定値よりも大きく、前記他車両の絶対加速度から前記自車両の絶対加速度を引いた相対加速度が所定値よりも大きい場合に、前記異常速度上昇があったと判定すれば、当該異常速度上昇を正確に判定することができる。
【0016】
(6) 本発明の交通システムにおいて、前記異常事象には、更に、前記他車両が異常に大きい減速度で急減速する異常速度低下が含まれることが好ましい。
この場合、前記判定手段は、前記他車両の絶対減速度が所定値よりも大きい場合に、前記異常速度低下があったと判定すれば、当該異常速度低下の発生を正確に判定することができる。
【0017】
(7) 本発明の交通システムにおいて、前記異常事象には、前記他車両が異常に大きい速度で進行方向を変化させる異常方向変化が含まれていてもよい。
この場合、前記判定手段は、前記他車両の進行方向変化速度の絶対値が所定値よりも大きく、前記他車両のタイヤ方向変化速度の絶対値が所定値よりも大きい場合に、前記異常方向変化があったと判定すれば、当該異常方向変化の発生を正確に判定することができる。
【0018】
(8)(9) 本発明の交通システムにおいて、前記異常事象には、更に、前記他車両についての異常事態発生が含まれていることが好ましい。
この場合、前記判定手段は、前記自車両の監視エリア内にある前記他車両のシステム情報が異常である場合に、前記異常事態発生があったと判定することができる。或いは、前記判定手段は、前記自車両の監視エリア内にある前記他車両から正常終了を受信せずに、車両情報を受信できなくなった場合に、前記異常事態発生があったと判定してもよい。これらのいずれも場合も、当該異常事態発生を正確に判定することができる。
【0019】
(10) 本発明の第2の観点に係るコンピュータプログラムは、他車両に生じた異常事象を自車両の搭乗者に報知する処理を、車載コンピュータに実行させるためのコンピュータプログラムであって、上述の(1)〜(8)に記載した交通システムと実質同一の発明である。
このため、本発明のコンピュータプログラムは、上述の(1)〜(9)に記載した交通システムと同様の作用効果を奏する。
【0020】
(11) 本発明の第3の観点に係る異常事象の判定処理装置は、道路を走行する車両から送信された車両情報を受信する受信部と、受信した車両情報に基づいて、当該車両に関する異常事象の有無を判定する判定手段と、前記判定手段の結果が異常事象ありの場合、当該車両に異常事象が発生したことを所定の対象に対して出力する出力手段と、を備えていることを特徴とする。
【0021】
本発明の第3の観点に係る異常事象の判定処理装置によれば、判定手段が、道路を走行する車両から送信された車両情報に基づいて、当該車両に関する異常事象の有無を判定し、出力手段が、その判定結果が異常事象ありの場合に、当該車両に異常事象が発生したことを所定の対象に出力する。そのため、所定の対象を車両(自車両)とした場合には、事故に繋がる可能性が高い異常事象が他車両に発生したときに、その発生を自車両の搭乗者に報知することができる。また、判定処理装置は、道路交通に関する情報の収集、分析等を行う交通管制センターに設置することができ、この場合、車両に発生した異常事象を所定の対象としての交通管理者や道路管理者に報知し、信号制御や道路管理のために異常事象の判定結果を活用することができる。また、判定処理装置は、異常事象が発生したことを路上に設置されている交通信号制御機に出力することができ、その情報をもとに信号制御を実行させることができる。
なお、判定処理装置と車両との間の通信は、両者の間で直接的に行われてもよいし、道路に設置された路側通信機を介して行われてもよい。出力手段は、判定結果についての情報を車両の車載装置に送信し、この車載装置におけるディスプレイやスピーカー等の出力装置を介して搭乗者に報知する構成であってもよい。
【0022】
(12) 本発明の第4の観点に係る交通システムにおいて、前記異常事象には、前記車両が渋滞状態にあることが含まれることが好ましい。
この場合、前記判定手段が、前記車両が異常に低速で走行し、かつ走行方向下流側の信号が通行可能な現示である場合に、当該車両が渋滞状態にあると判定すれば、当該渋滞状態を信号の現示の状態に応じてリアルタイムに判定することができる。
【発明の効果】
【0023】
以上の通り、本発明によれば、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【図面の簡単な説明】
【0024】
【図1】交差点において交差する道路の斜視図である。
【図2】車載装置の構成例を示すブロック図である。
【図3】車車間通信の有効範囲と通信内容を示す道路平面図である。
【図4】車載コンピュータによる異常予告処理のフローチャートである。
【図5】監視対象車両と走行リンクとの位置関係を示す道路平面図である。
【図6】図5の各車両が送信する車両情報の一例を示す表である。
【図7】車両の渋滞状態を示す道路平面図である。
【発明を実施するための形態】
【0025】
以下、図面を参照しつつ、本発明の実施形態を説明する。
〔用語の定義〕
本発明の実施形態を説明するに当たり、まず、本明細書で用いる用語の定義を行う。
「車両」:道路を通行する車両全般、具体的には、道路交通法上の車両のことをいう。同法上には、自動車、原動機付自転車、軽車両及びトロリーバスが含まれる。
【0026】
「自車両」:車両通行に障害を与え得る事象(以下、「障害事象」という。)を搭乗者に報知する側の車両のことをいう。
「他車両」:自車両にとって障害事象の原因となり得る他の車両のことをいう。
「流入リンク」「流出リンク」:ある交差点から見て、当該交差点に向かって流入する方向のリンクのことを流入リンクといい、ある交差点から見て、当該交差点から流出する方向のリンクのことを流出リンクという。
【0027】
「プローブ情報」:実際に道路を走行する車両から得られる、当該車両に関する各種の車両情報のことをいう。この車両情報は、フローティングカーデータ(Floating Car Data :FCD)と言われる場合もあり、車両2の絶対位置、瞬間速度、進行方位及びこれらの発生時刻のデータが含まれる。
なお、後述の通り、本実施形態のプローブ情報には、車両種別、タイヤ方向及びシステム状態などの情報も含まれる。
【0028】
〔第1の実施形態〕
〔システムの全体構成〕
図1は、交差点Jにおいて交差する道路R1,R2の斜視図である。
図1において、上り下り各2車線の道路R1と、同じく上り下り各2車線の道路R2とは、交差点Jで互いに交差している。なお、2つの道路R1,R2の車線数は片側2車線に限られるものではない。
【0029】
図1に示すように、交差点Jのコーナー部の近傍には、各道路R1,R2に通行権を与える信号灯器が設置されている。また、当該交差点Jと図示しない他の交差点の近傍に、車両2と無線通信が可能な路側通信機(ITS無線機)1が設置されている。
本実施形態の交通システムは、複数の車両2の車載装置3(図2参照)と、この車載装置3の車載通信機39と無線通信する路側通信機1とを含む。なお、車両2と無線通信を行う路側通信機1は、赤外線信号を利用した光ビーコン(図示せず)であってもよい。
【0030】
本実施形態の交通システムでは、他の交差点に設置された路側通信機1との無線通信(路路間通信)に無線通信が用いられ、路側通信機1と車載通信機39との間(「路」から「車」への路車間通信と「車」から「路」への車路間通信との双方を含む。)と車載通信機39同士(車車間通信)についても、無線通信が用いられている。
なお、交通管制センターに設けられた中央装置50(図2参照)は、各路側通信機1と有線または無線での双方向通信が可能となっている。
【0031】
路側通信機1は、自身が無線送信するための専用のタイムスロットをTDMA(Time Division Multiple Access )方式で割り当てており、このタイムスロット以外の時間帯には無線送信を行わない。従って、路側専用のタイムスロット以外の時間帯は、車載通信機39のためのCSMA方式による送信時間として開放されている。
なお、路側通信機1は、自身の送信タイミングを制御するために、例えば、自身の時計をGPS時刻に合わせて他の路側通信機1と時刻同期を図る機能を有している。
【0032】
〔車載装置の構成〕
図2は、車載装置3の構成例を示すブロック図である。
図2に示すように、本実施形態の車載装置3は、車載コンピュータ31、GPS受信機32、車速センサ33、ジャイロセンサ34、記憶装置35、ディスプレイ36、スピーカー37、入力デバイス38及び車載通信機39を備えている。
【0033】
車載コンピュータ31は、車両2の経路探索と車内の他の電子機器32〜39の動作制御とを行う電子制御装置である。この車載コンピュータ31は、GPS受信機32が定期的に取得するGPS信号により自車の絶対位置を求めるとともに、車速センサ33及びジャイロセンサ34から随時入力される入力信号に基づいて、その位置及び方位を補完し、車両2の正確な現在位置及び方位を常に把握している。
GPS受信機32、車速センサ33及びジャイロセンサ34は、車両2の走行位置、速度及び向きを把握するセンサ類である。
【0034】
記憶装置35は、地図データベースを備える。この地図データベースは、車載コンピュータ31に道路地図データを提供するものであり、この道路地図データはリンクデータやノードデータを含み、DVDなどの記録媒体に格納されている。
記憶装置35は、車載コンピュータ31からの指令に応じて記録媒体から必要な道路地図データを読み出して当該コンピュータ31に提供する。記録媒体としては、DVD以外にも、CD−ROMやメモリカード、ハードディスク等の種々の記録媒体を採用できる。
【0035】
ディスプレイ36とスピーカー37は、車載コンピュータ31が生成した各種情報を車両2の搭乗者に提示するための出力装置である。
具体的には、ディスプレイ36は、経路探索の際の入力設定画面、自車周辺の地図画像及び目的地までの経路情報等を表示し、スピーカー37は、車両2を目的地に誘導するためのアナウンスを音声出力する。また、これらの出力装置は、ダウンリンク情報に含まれる中央装置50などからの交通情報をドライバーに提示することもできる。
【0036】
入力デバイス38は、車両2のドライバーが経路探索に関する各種入力を行うためのものであり、操舵ハンドルに設けられた操作スイッチ、ジョイスティック、或いは、ディスプレイ36に設けたタッチパネル等の各種入力手段の組み合わせよりなる。
なお、ドライバーの音声認識によって入力を受け付ける音声認識装置を、入力デバイス38とすることもできる。この入力デバイス38にドライバー等の搭乗者が行った入力信号は車載コンピュータ31に送られる。
【0037】
車載通信機39は、ITS無線機(光ビーコンでもよい。)よりなる路側通信機1との間の路車間通信を通じて、車載コンピュータ31が生成したアップリンク情報をその路側通信機1に送信し、信号灯器を制御する交通信号制御機が中央装置50から取得した、所定の交通情報を含むダウンリンク情報を、路側通信機1から受信する。
【0038】
車載コンピュータ31は、各種の制御プログラムを実装したマイクロコンピュータなどの演算処理装置より構成されている。
車載コンピュータ31は、上記制御プログラムを実行することにより、ディスプレイ36に地図画像を表示させる機能、出発地から目的地までの経路(中継地がある場合はその位置を含む。)を算出する機能、その経路に従って車両2を目的地まで誘導する機能等、各種のナビゲーション機能を実行可能である。
【0039】
また、車載コンピュータ31は、自車両2の車両情報と他車両2から取得した車両情報とを用いて他車両2の異常事象を判定し、判定した異常事象を自車両2の搭乗者に報知する、異常予告処理を実行可能であるが、この処理の詳細は後述する。
なお、以下においては、「自車両」と「他車両」の識別を容易にするため、自車両2の符号を「2A」とし、他車両2の符号を「2B」とする。
【0040】
〔車両情報のデータ収集〕
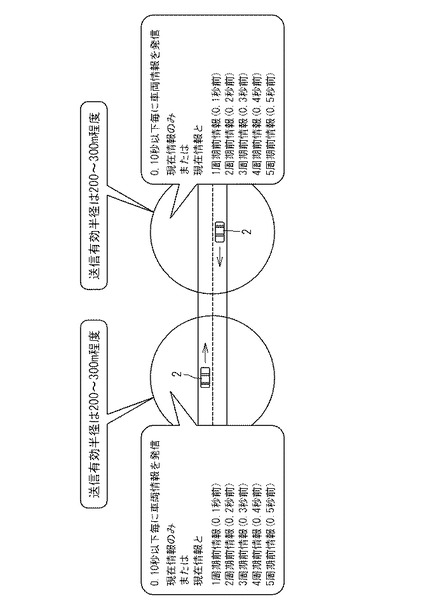
図3は、車車間通信の有効範囲と通信内容を示す道路平面図である。
図3に示すように、各車両2が車車間通信する場合の有効範囲は、送信元の車両2を中心とした200〜300m程度の送信有効半径の円内の範囲である。
また、垂直方向の伝達有効範囲は、仰角で水平方向から±6〜10度程度(実用的な道路の最大勾配に対して余裕を考慮した値)に設定すればよい。この数値は、道路構造令における道路の最大勾配12%のうち、設計速度60km/h以上の実用的な勾配8%を対象とした場合の道路勾配(=約5度)に対して、余裕を考慮した値である。
【0041】
このように、垂直方向の伝達有効範囲を限定すれば、自車両2Aが走行する平面とは別の平面を走行する車両(例えば、自車両2Aが平地の道路を走行しているときに、高架道路を走行する車両)からの車両情報を誤って受信するのを防止できる利点がある。
ただし、垂直方向の伝達有効範囲が設定されていると、横転や逆立ち等をした他車両2Bからの車両情報を自車両2Aが受信できない可能性がある。そこで、かかる不都合の回避策として、次の2つの方策(これらの方策を組み合わせてもよい)が考えられる。
【0042】
すなわち、第1の方策は、垂直方向の伝達有効範囲を原則的に設定するが、異常事象が発生した場合に、垂直方向の伝達有効範囲を解除し、垂直方向に無指向性で電波を送信する方策である。
また、第2の方策は、垂直方向の伝達有効範囲を原則として設定せず、垂直方向に無指向性で電波を送信するが、異常事象が生じた他車両2Bが走行していたリンクと、自車両2Aのリンクとの関連性を自車両2Aが判断し、自車両2Aと関連のあるリンク上の他車両2Bについてのみ異常事象の判定対象とする方策である。
【0043】
本実施形態では、各車両2の車載コンピュータ31は、次のa)〜h)のデータを含む車両情報(プローブ情報)を生成し、車載通信機39に所定時間ごとに送信させる。従って、車車間通信の有効範囲内にある車両2は、通信の相手方の車両2から送信されたa)〜h)のデータ含む車両情報をお互いに取得する。
走行中に他車両2Bの異常事象を正確に検知するためには、車両情報を送信する時間間隔はできるだけ短い間隔が望ましく、例えば、1.0秒より短い間隔であることが好ましい。なお、本実施形態では、当該時間間隔を0.1秒とする。
【0044】
a)現在時刻
時、分、秒(0.1秒単位)
b)車両ID
車両2の識別情報である。車両IDは必ずしも含まれていなくてもよいが、含める場合には、ランダムな数値が望ましい。ただし、表現形式は問わない。
c)車両種別
原付2輪、自動2輪、軽自動車、普通自動車、貨物自動車、大型乗合自動車、大型貨物自動車等の種別を表す情報である。
【0045】
d)瞬間速度
車両2の絶対速度を表す情報である。
e)絶対位置
車両2の位置を表す情報である。緯度経度、或いは、走行リンク番号とそのリンクの位置等によって表現される。
f)進行方向
車両2の方位を表す情報である。
【0046】
g)タイヤ方向(蛇角方向)
進行方向と主タイヤの方向とのなす角度を表す情報である。
h)システム状態
車両2のシステム状態を表す情報である。システム情報の種別には、「正常」、「異常」及び「正常停止」がある。このうち、「正常」は、車両2の駆動系統や電気系統がすべて正常に動作していることを示す情報であり、「異常」は、走行に支障を来す異常事態が車両2に発生したことを示す情報である。
【0047】
また、「正常停止」は、ドライバーの操作で車両2の駆動系統と電気系統を正常に停止させる場合に、車載通信機39が電源停止前に最後に送信する情報である。
なお、システム状態の異常の具体例としては、車両2が急傾斜で走行不能となる異常停止の場合や、異常な電源の喪失の場合がある。電源の喪失の場合には、車両情報を送信する車載通信機39が、最終情報送信用の予備バッテリー(発信は数回分でよい)により、システム状態が「異常」であることを送信すればよい。
【0048】
上記のa)〜h)の各データは、現在時刻に、当該現在時刻におけるリアルタイムの車両情報(単一情報)として送信される。
或いは、a)〜h)の各データは、現在時刻に、複数周期分の車両情報を纏めた複数情報(例えば、現時刻の、1周期前(0.1秒前)、2周期前(0.2秒前)……5周期前(0.5秒前)など)として送信することもできる。車両情報の送信間隔は、単一情報であれ複数情報であれ、0.1秒ごとに個々の車両2から送信される。
【0049】
なお、ジャイロセンサなどの方向検出装置で自車両2Aの姿勢を判定しておき、自車両2Aが通常と大きく異なる傾斜状態(例えば、異常な急傾斜や車両転倒などの状態)になった場合に、垂直方向の伝達有効範囲(本実施形態では、仰角15度)を解除し、システム状態の「異常」を送信することにしてもよい。
また、車両情報を無指向で発信してもよい。この場合、受信した車両情報に含まれる絶対位置と自車両2Aの絶対位置とから、自車両2Aが走行する平面とは別の平面を走行する他車両2Bからの車両情報かどうかを判定し、別の平面の他車両2Bからの車両情報を破棄することにより、自車両2Aの事故と無縁な他車両2Bの車両情報を排除できる。
【0050】
〔異常予告処理のフローチャート〕
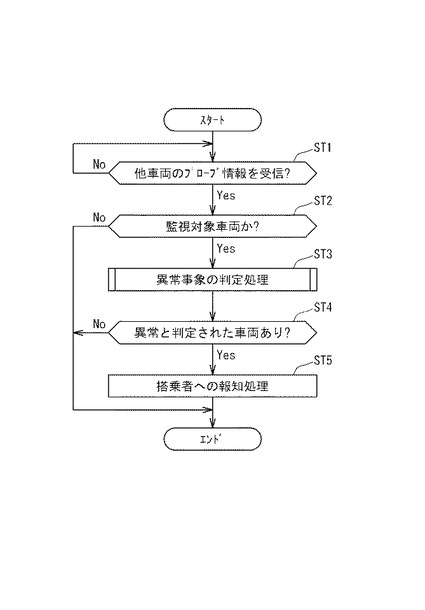
図4は、車載コンピュータ31による異常予告処理のフローチャートである。
自車両2Aの車載コンピュータ31は、図4に示す処理を所定の制御周期(例えば、0.1秒)ごとに行う。
まず、車載コンピュータ31は、他車両2Bのプローブ情報(車両情報)を受信したか否かを繰り返し判定する(ステップST1)。
【0051】
次に、車載コンピュータ31は、他車両2Bのプローブ情報(車両情報)を受信した場合には、その他車両2Bが監視対象車両か否かを探索する「監視対象処理」を行い(ステップST2)、他車両2Bが監視対象車両ではない場合は処理を終了する。
車載コンピュータ31は、他車両2Bが監視対象車両である場合は、その車両について「異常事象の判定処理」を行う(ステップST3)。なお、かかる監視対象処理と異常事象の判定処理の詳細については、後述する。
【0052】
車載コンピュータ31は、上記判定処理において異常と判定された車両2があるか否かを判断し(ステップST4)、異常と判定された車両2がある場合は、搭乗者への報知処理を行い(ステップST5)、異常と判定された車両2がない場合は、その報知処理を行わずに処理を終了する。
上記報知処理は、自車両2Aのドライバーを含む搭乗者に、例えば、「近隣に異常事象あり。注意してください。」などの旨をディスプレイ36やスピーカー37から出力したり、チャイム等の警告音を発したりすることによって行われる。
【0053】
〔監視対象処理〕
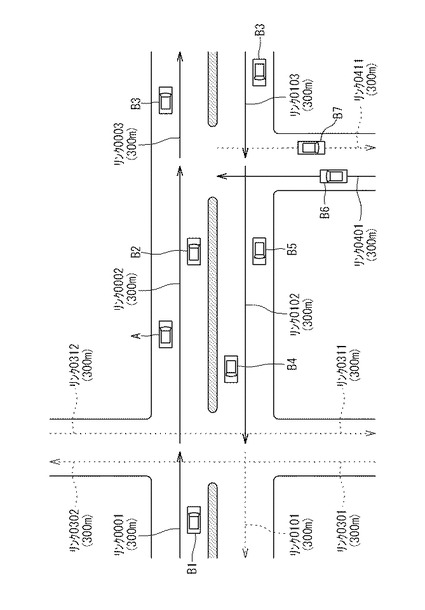
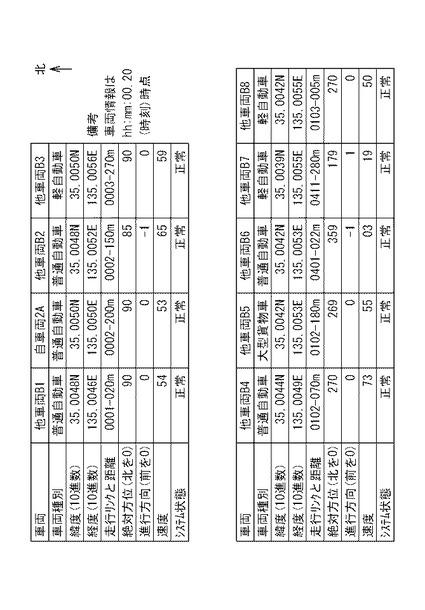
図5は、監視対象車両と走行リンクとの位置関係を示す道路平面図である。また、図6は、図5の各車両が送信する車両情報の一例を示す表である。
なお、図5及び図6では、自車両2Aの符号を「A」と記載し、合計7台の他車両2Bの符号をそれぞれ「B1」〜「B7」と記載している。
【0054】
自車両Aの車載コンピュータ31は、他車両B1〜B7からそれぞれ取得した車両情報の位置情報に基づいて、他車両B1〜B7が次の条件1〜6に該当するか否かを判定し、その条件1〜6を満たす他車両を監視対象車両とし、その条件1〜6を満たさない他車両については、監視対象車両から外す。これが、車載コンピュータ31が行う監視対象処理である。
なお、条件1〜5は、これらのうちのいずれかが充足されれば足りるOR条件であり、条件6は、必ず充足されるべき必要条件である。
【0055】
条件1:
自車両Aと同じリンク(図5のリンク0002)を走行する車両であること。図5の車両B2がこれに相当する。
条件2:
自車両Aのリンク(図5のリンク0002)と同じ方向でかつその上流ノードに接続する流入リンク(図5のリンク0001)、或いは、自車両Aのリンクと同じ方向でかつその下流ノードに接続する流出リンク(図5のリンク0003)を走行する車両であること。図5の車両B1,B3がこれに相当する。
【0056】
条件3:
自車両Aのリンク(図5のリンク0002)の下流ノードに接続する流入リンク(図5のリンク0401)を走行する車両であること。図5の車両B6がこれに相当する。
条件4:
自車両Aのリンク(図5のリンク0002)に対向するペアリンク(図5のリンク0102)を走行する車両であること。図5の車両B4,B5がこれに相当する。
【0057】
条件5:
自車両Aのリンク(図5のリンク0002)に対向するペアリンク(図5のリンク0102)と同じ方向でかつその上流ノードに接続する流入リンク(図5のリンク0103)を走行する車両であること。図5の車両B8がこれに相当する。
条件6:
「監視エリア」又は「移行エリア」内の車両であること。
例えば、自車両Aから半径100〜200m以内の円形エリアを「監視エリア」とし、監視エリアの外側50mの程度の範囲を「移行エリア」とする。
【0058】
図5では、条件1〜5に対応するリンクを実線の矢印で示し、条件1〜5に対応しないリンクを破線の矢印で示している。従って、他車両B7については、条件1〜5のいずれにも該当しないので、監視対象車両から外される。
もっとも、監視対象車両を選定する条件設定としては、自車両Aが走行中のリンクとの関係を考慮する条件1〜5を設定せずに条件6のみとし、監視エリアと移行エリア内の全方位に位置する他車両B1〜B8を監視対象車両とすることにしてもよい。
【0059】
なお、「リンク」は各車両2が情報共有できるリンク番号であればよく、例えばVICS(「VICS」は登録商標である。)リンクやDRMリンクが該当する。
また、車車間通信は自車両Aを基準とする場合、最大で200〜300mの範囲で通信することになるが、他車両B1〜B7が死角にあって直接的に把握できない可能性もある。このような場合の他車両B1〜B7の車両情報は、他の車両2や路側通信機1を中継して間接的に受信することにすればよい。
【0060】
〔異常事象の種類と監視理由〕
上述の通り、自車両2Aの車載コンピュータ31は、自車両2Aから見て監視対象車両に該当する他車両2Bについて、所定の異常事象の有無を所定の制御周期(例えば0.1秒)で判定する。
その異常事象の種類は、「異常高速走行」、「異常低速走行」、「異常速度上昇」、「異常速度低下」、「異常方向変化」及び「異常事態発生」の6種類がある。その種類ごとの簡単な内容と、その種類を監視する理由を列挙すると、次の通りである。
【0061】
1)異常高速走行:自車両2Aから見て他車両2Bの速度が異常に高速である事象である。例えば、高速道路においてこのような他車両2Bが自車両2Aの後方にあると、自車両2Aが他車両2Bに追突される可能性があるからである。
2)異常低速走行:自車両2Aから見て他車両2Bの速度が異常に低速である事象である。例えば、高速道路においてこのような他車両2Bが自車両2Aの前方にあると、自車両2Aが他車両2Bに追突する可能性があるからである。
【0062】
3)異常速度上昇:他車両2Bが異常に大きい加速度で急加速する事象である。このような他車両2Bは、事故を発生させる可能性が高いからである。
4)異常速度低下:他車両2Bが異常に大きい減速度で急減速する事象である。このような他車両2Bは、障害物による急制動や事故を誘発しかねない制動と考えられるからである。
【0063】
5)異常方向変化:他車両2Bが異常に大きい速度で進行方向を変化させる事象である。このような他車両2Bは、障害物の回避行動として急ハンドルを切ったと推定でき、後続車の事故を誘発し易いからである。
6)異常事態発生:他車両2Bの異常状態を示すシステム情報を取得したり、他車両2Bの車両情報を正常でなく喪失したりする事象である。このような他車両2Bは、緊急事態による情報発信のために停止、或いは、事故により停止したと考えられるからである。
【0064】
なお、自車両2Aの車載コンピュータ31は、0.1秒周期で車両情報を自車から送信及び受信するが、他車両2Bの異常事象を監視する場合、これらを現在情報と過去数周期分(過去5周期の場合、1周期=0.1秒なので0.6秒分)の車両情報を保持し、受信ごとに最も古い車両情報を破棄して最新情報に更新する。
以下、車載コンピュータ31が行う各種の異常事象の判定方法と、その異常事象を判定する場合の効果を説明する。
【0065】
〔異常高速走行〕
(判定方法)
自車両2Aの車載コンピュータ31は、自車両2Aと他車両2Bの相対速度の相違に基づいて、異常高速走行を判定する。本実施形態では、この判定を、異なる複数周期の車両速度を比較することによって行う。
一例として、自車両2Aと他車両2Bの、現在、1周期前及び2周期前の3つの時点の車両速度を用いる場合の条件を、以下に示す。
【0066】
すなわち、車載コンピュータ31は、次の条件a1及びa2の双方を満たす場合に、異常高速走行の異常事象が発生したと判定する。
条件a1:
現在時刻において、他車両速度−自車両速度>A1
1周期前の時刻において、他車両速度−自車両速度>A1
2周期前の時刻において、他車両速度−自車両速度>A1
条件a2:
他車両速度−制限速度(指定最高速度又は法定最高速度)>B1
【0067】
ここで、上記の設定値A1,B1の設定は、人手による設定でもよく、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、情報受信範囲内の平均速度、道路種別などに応じて動的に変化させてもよい。
例えば、受信範囲での車両平均速度が低速の場合(例えば、渋滞の場合)は、B1を小さくし(0又は負値)、高速の場合はB1を大きくする(0又は正値)ことにより、設定値B1を変化させるようにすればよい。
【0068】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常高速走行の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが高速で走行していても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常高速走行の判定を行うようにしてもよい。自車両2Aの後方から走行してくる他車両2Bがほとんどブレーキをかけることなく高速で追突するケース等があり得るからである。
【0069】
(異常高速走行を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、自車両2Aよりも異常に高速で走行する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの後方にある場合は、自車両2Aが追突される可能性を報知でき、他車両2Bが自車両2Aの前方にある場合は、他車両2Bが追突事故を起こす可能性を報知でき、交通事故の低減に貢献できる。また、自車両2Aが追い越し車線を走行中は、走行車線への移行を推奨でき、交通の円滑化にも寄与できる。
【0070】
〔異常低速走行〕
(判定方法)
自車両2Aの車載コンピュータ31は、自車両2Aと他車両2Bの相対速度の相違に基づいて、異常高速走行を判定する。本実施形態では、この判定についても、異なる複数周期の車両速度を比較することによって行われる。
一例として、自車両2Aと他車両2Bの、現在、1周期前及び2周期前の3つの時点での車両速度を用いる場合の条件を、以下に示す。
【0071】
すなわち、車載コンピュータ31は、次の条件b1及びb2の双方を満たす場合に、異常低速走行の異常事象が発生したと判定する。
条件b1:
現在時刻において、自車両速度−他車両速度>A2
1周期前の時刻において、自車両速度−他車両速度>A2
2周期前の時刻において、自車両速度−他車両速度>A2
条件b2:
他車両速度−制限速度(指定最高速度または法定最高速度)<B2
【0072】
ここで、上記の設定値A2,B2の設定も、人手による設定でもよいが、自車両2Aの速度、最高速度(指定最高速度又は法定最高速度)、道路種別などに応じて動的に変化させてもよい。
例えば、受信範囲での車両平均速度が低速の場合(渋滞の場合)は、B2を小さくし(0又は負値)、高速の場合はB2を大きくする(0又は正値)ことにより、設定値B1を変化させるようにすればよい。
【0073】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常低速走行の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが低速で走行していても、自車両2Aの事故に繋がる可能性が少ないからである。
【0074】
(異常低速走行を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、自車両2Aよりも異常に低速で走行する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方にある場合は、自車両2Aが他車両2Bに追突する可能性を報知でき、交通事故の低減に貢献できる。
【0075】
〔異常速度上昇〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両速度の変化に基づいて、他車両2Bについての異常速度上昇を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
【0076】
すなわち、車載コンピュータ31は、次の条件c1及びc2の双方を満たす場合に、異常速度上昇の異常事象が発生したと判定する。
条件c1:絶対加速度比較
他車両2Bの現在速度−他車両2Bの1周期前速度>A3
他車両2Bの1周期前速度−他車両2Bの2周期前速度>A3
他車両2Bの2周期前速度−他車両2Bの3周期前速度>A3
【0077】
条件c2:相対加速度比較
(他車両2Bの現在速度−他車両2Bの1周期前速度)−(自車両2Aの現在速度−自車両2Aの1周期前速度)>B3
(他車両2Bの1周期前速度−他車両2Bの2周期前速度)−(自車両2Aの1周期前速度−自車両2Aの2周期前速度)>B3
(他車両2Bの2周期前速度−他車両2Bの3周期前速度)−(自車両2Aの2周期前速度−自車両2Aの3周期前速度)>B3
【0078】
ここで、上記の設定値A3,B3の設定も、人手による設定でもよいが、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、或いは、受信範囲内の平均速度などに応じて動的に変化させてもよい。
例えば、受信範囲内の車両平均速度が低速の場合(渋滞の場合)は、B3を小さくし(0又は正値)、低速の場合はB3を大きくする(0又は正値)することにより、設定値B3を変化させるようにすればよい。
【0079】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常速度上昇の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが急加速を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常速度上昇の判定を行うようにしてもよい。自車両2Aに後続する他車両2Bが急加速することによって自車両2Aに追突するケース等があり得るからである。
【0080】
(異常速度上昇を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な加速度で急加速する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの後方にある場合は、自車両2Aが追突される可能性を報知でき、他車両2Bが自車両2Aの前方にある場合は、他車両2Bが追突事故を起こす可能性を報知でき、交通事故の低減に貢献できる。
【0081】
なお、上記の異常速度上昇の判定方法において、他車両2Bの絶対加速度についての条件c1だけでなく、他車両2Bと自車両2Aの相対加速度についての条件c2を含める理由は、例えば、信号待ちの自車両2Aと他車両2Bが青開始時点で同時に発進を行うような場合は、交通事故に繋がる可能性が低いため、このような場合を異常事象から外すためである。
【0082】
〔異常速度低下〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両速度の変化に基づいて、他車両2Bについての異常速度低下を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
【0083】
すなわち、車載コンピュータ31は、次の条件d1を満たす場合に、異常速度低下の異常事象が発生したと判定する。
条件d1:絶対減速度比較
他車両2Bの1周期前速度−他車両2Bの現在速度>A4
他車両2Bの2周期前速度−他車両2Bの1周期前速度>A4
他車両2Bの3周期前速度−他車両2Bの2周期前速度>A4
【0084】
ここで、上記の設定値A4の設定も、人手による設定でもよいが、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、受信範囲内での平均速度などに応じて動的に変化させてもよい。
例えば、他車両2Bの車両速度が比較的大きい場合は、A4を小さくし、小さい場合はA4を大きくすることにより、設定値A4を変化させるようにすればよい。
【0085】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常速度低下の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bが急減速を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常速度低下の判定を行うようにしてもよい。自車両2Aに後続する他車両2Bが急ブレーキをかけて急減速しつつ自車両2Aに追突するケース等があり得るからである。
【0086】
(異常速度低下を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な減速度で急減速する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合は、自車両2Aの前方に交通障害となる事象(例えば、事故、落下物又は渋滞など)が存在する可能性があることを報知でき、交通事故の低減に貢献できる。
【0087】
なお、上記の例では、現在から3周期前(0.1秒周期の場合は0.3秒前)の速度情報を用いて減速度を判定したが、これより多い速度情報を用いてもよい。
もっとも、例えば、時速100km/hで走行中の場合に急制動をかけた場合は制動時間が約2秒と短いことから、判定する周期数を余り多くしても、却って判定精度が悪くなる場合がある。
【0088】
〔異常方向変化〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの進行方向の変化に基づいて、他車両2Bについての異常方向変化を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の進行方向を用いる場合の条件を以下に示す。
【0089】
すなわち、車載コンピュータ31は、次の条件e1及びe2の双方を満たす場合に、異常進行方向変化の異常事象が発生したと判定する。
なお、「進行方向」は、車両2の「絶対方向」又は「緯度経度」のいずれから求めることにしてもよい。また、下記の条件において、||は絶対値を表す。
【0090】
条件e1:絶対方向比較
|他車両2Bの1周期前進行方向−他車両2Bの現在進行方向|>A5
|他車両2Bの2周期前進行方向−他車両2Bの1周期前進行方向|>A5
|他車両2Bの3周期前進行方向−他車両2Bの2周期前進行方向|>A5
【0091】
条件e2:相対方向比較
|他車両2Bの1周期前のタイヤ方向−他車両2Bの現在のタイヤ方向|>B5
|他車両2Bの2周期前のタイヤ方向−他車両2Bの1周期前のタイヤ方向|>B5
|他車両2Bの3周期前のタイヤ方向−他車両2Bの2周期前のタイヤ方向|>B5
【0092】
ここで、上記の設定値A5,B5の設定も、人手による設定でもよいが、他車両2Bの車両速度に応じて動的に変化させてもよい。
例えば、他車両2Bの車両速度が比較的大きい場合は、A5を小さくし、小さい場合はA5を大きくすることにより、設定値A5を変化させるようにすればよい。
【0093】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常方向変化の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bが急な方向変化を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
また、車載コンピュータ31は、受信範囲内の車両2の平均速度が比較的低速の場合(渋滞の場合)にも、異常方向変化の判定を行わない。その理由は、交通渋滞の場合には、他車両2Bの異常方向変化による事故の可能性が殆どないからである。
【0094】
(異常方向変化を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な大きさで急に進行方向が変化する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合には、自車両2Aの前方に交通障害となる事象(例えば、事故、落下物又は渋滞など)が存在する可能性があることを報知でき、交通事故の低減に貢献できる。
【0095】
〔異常事態発生〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両情報の受信状態と、その車両情報に含まれるシステム状態とに基づいて、他車両2Bについての異常事態発生を判定する。
具体的には、車載コンピュータ31は、以下の開始条件S1〜S3を満たす他車両2Bを検出した場合に、その他車両2Bを異常事態発生の監視対象とする。
【0096】
開始条件S1:
自車両2Aの停止時(又は渋滞時)に監視エリア内に存在する他車両2Bであって、自車両2Aが走行を開始した時(非渋滞状態になった時)に、監視エリア内に存在する他車両2B
【0097】
開始条件S2:
自車両2Aの走行時に移行エリアに存在(又は出現)し、監視エリアに移動した他車両2B
開始条件S3:
自車両2Aが走行している場合に監視エリアに出現した他車両2B(理由は不明でも、移行エリアを経由しない場合も含む。)
【0098】
また、車載コンピュータ31は、自車両2Aが以下の終了条件E1を満たす場合、或いは、以下の終了条件E2又はE3のいずれかを満たす他車両2Bを、異常事態発生の監視対象から除外する。
【0099】
終了条件E1:
自車両2Aが停止した場合(又は渋滞になった場合)
終了条件E2:
自車両2Aの走行時に監視エリアに存在(又は出現)し、移行エリアに移動した他車両2B
終了条件E3:
自車両2Aの監視エリア又は移行エリアに存在する他車両2Bであって、システム状態が「正常終了」である車両情報を送信した他車両2B
【0100】
そして、自車両2Aの車載コンピュータ31は、上記開始条件S1〜S3のいずれかを満たす監視対象の他車両2Bが、次の条件f1,f2のいずれかを満たす場合に、当該他車両2Bに異常事態発生の異常事象が生じた判定をする。
【0101】
条件f1:
システム状態が「異常」である車両情報を他車両2Bから受信した場合。現時点でのシステム状態が「正常」であり、次周期以後に監視エリア内でのシステム状態が「異常」となった場合を含む。
条件f2:
監視エリア内において、他車両2Bから「正常終了」を受信せずに、車両情報を受信できなくなった場合。なお、この条件f1,f2の判定は、単一周期又は連続した複数周期のいずれで判定してもよい。
【0102】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常事態発生の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bからシステム情報が異常である車両情報を取得したり、他車両2Bの車両情報が不正常に消失したりしても、事故に繋がる可能性が少ないからである。
また、車載コンピュータ31は、移行エリア内でシステム状態が変化した場合や、他車両2Bの受信状態が未確認の場合も、異常事態発生の判定を行わない。
【0103】
(異常事態発生を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、システム情報が異常である或いは正常終了ではなく車両情報を送信しなくなった近隣の他車両2Bの有無を検出し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合は、自車両2Aの前方に陥没等の道路障害が存在する可能性があることを報知でき、道路障害に伴う二次災害の低減に貢献できる。
【0104】
〔第2の実施形態〕
上記第1の実施形態では、自車両2Aの車載通信機39が、他車両2Bの車載通信機39との間で「車車間通信」を行うことによって、自車両2Aの車載コンピュータ31が他車両2Bの異常事象の有無を判定し、かつ搭乗者に報知する異常予告処理を実行することについて説明した。
これに対して、本実施形態においては、道路を走行している車両2の車載通信機39と、交差点等に設置された路側通信機1との間で「路車間通信」を行うことによって、路側通信機1に通信可能に接続された交通管制センターの中央装置50(図2参照)において、車両2の異常事象の有無を判定し、その情報を種々の用途に活用する。なお、中央装置50は、車両2の異常事象の有無を判定する制御部51のほか、表示部、通信部、記憶部、操作部等を備えたワークステーションやパーソナルコンピュータ等からなる。そして、中央装置50の制御部51は、路側通信機1から受信した各種の情報、例えば、車両のプローブ情報や、道路に設置された車両感知器等の情報等を収集して処理し、各種の情報提供や信号制御等を統括的に行うことができる。
【0105】
異常事象の情報は、所定の対象に出力される。例えば、異常事象の情報は、交通管制センターにおける交通管理者や道路管理者に対する報知(情報提供)され、交通信号灯器の制御、道路管理などに利用することができる。また、異常事象の情報は、中央装置50から路側通信機1を介して道路を走行している車両2の車載通信機39に送信され、当該車両2における出力装置(ディスプレイ36,スピーカー37等)を介して搭乗者に報知することができる。この場合、第1の実施形態と同様に、障害事象の原因となりうる車両(他車両2B)に生じた異常事象を、障害事象の被害を受け得る車両(自車両2A)の搭乗者に報知することによって、他車両2Bとの関係で発生しうる事故の危険性を、自車両2Aの搭乗者に正確に報知することができる。
【0106】
本実施形態において、各車両2の車載コンピュータは、第1の実施形態と同様に、次のa)〜h)のデータを含む車両情報(プローブ情報)を生成し、車載通信機39に所定時間ごとに送信させる。したがって、路車間通信の通信範囲にある路側通信機1は、車両2から送信されたa)〜h)のデータを含む車両情報を受信する。車両情報を送信する時間間隔は、例えば1秒間隔とすることができる。また、各データの具体的な内容は、第1の実施形態と同様であるため、詳細な説明は省略する。
a)現在時刻、b)車両ID、c)車両種別、d)瞬間速度、e)絶対位置、f)進行方向、g)タイヤ方向(蛇角方向)、h)システム状態。
【0107】
上記のa)〜h)の各データは、現在時刻に、当該現在時刻におけるリアルタイムの車両情報(単一情報)として送信される。
或いは、a)〜h)の各データは、現在時刻に、複数周期分の車両情報を纏めた複数情報(例えば、現時刻の、1周期前(1秒前)、2周期前(2秒前)……5周期前(5秒前)など)として送信することもできる。車両情報の送信間隔は、単一情報であれ複数情報であれ、1秒ごとに個々の車両2から送信される。
【0108】
路側通信機1は、車両2の車載通信機から送信された車両情報を受信し、さらにその情報を交通管制センターの中央装置50に有線(又は無線)によりでリアルタイムに送信する。
中央装置50は、リンク(VICSリンクやDRMリンク等)に基づいた道路ネットワークを管理しており、受信した「車両情報」を道路ネットワーク上に展開し、各車両2の動きを追跡し解析する。そして、中央装置50は、各車両2の車両情報から、「異常速度低下」、「異常進行方向変化」、及び「車両の渋滞状態」の3つの異常事象について判定を行う。
【0109】
異常速度低下及び異常進行方向変化を判定(監視)する理由については、第1の実施形態と同様である。すなわち、車両2の異常な速度低下は、障害物による急制動や事故を誘発しかねない制動と考えられるからであり、車両2の異常な方向変化は、障害物の回避行動として急ハンドルを切ったと推定でき、後続車の事故を誘発し易いからである。また、車両の渋滞状態を判定する理由は、渋滞が生じる原因として、自然渋滞だけでなく事故や障害物の存在が考えられ、渋滞が生じている区間に新たに車両2が進入すると、二次的な事故等が誘発される可能性があるからである。また、車両の渋滞状態を検出することで、その情報を中央装置50が行う中央感応制御等の信号制御、交通情報(渋滞情報等)の作成や提供、道路管理のために有効に活用することができる。以下、第1の実施形態と一部重複する説明もあるが、各異常事象についての判定方法とその効果について説明する。
【0110】
〔異常速度低下〕
(判定方法)
中央装置50は、所定時間ごとの車両2の車両速度の変化に基づいて、車両2についての異常速度低下を判定する。
一例として、車両2の、現在、1周期前、2周期前、及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
中央装置50は、次の条件を満たす場合に、当該車両2に異常速度低下の異常事象が発生したと判定する。
【0111】
条件g1:絶対減速度比較
車両の1周期前速度−車両の現在速度>A7
車両の2周期前速度−車両の1周期前速度>A7
車両の3周期前速度−車両の2周期前速度>A7
【0112】
条件g2:
特定範囲C7において条件g1を満たした車両数>D7
【0113】
ここで、上記の設定値A7は、人手による設定でもよいし、車両の速度、制限速度(指定最高速度又は法定最高速度)等に応じて動的に変化させてもよい。例えば、車両の車両速度が比較的大きい場合は、A7を小さくし、小さい場合は、A7を大きくすることにより、設定値A7を変化させるようにすればよい。また、設定値C7,D7についても、時刻、道路種別、現時点における単位時間交通量等に応じて動的に変化させてもよい。
【0114】
(異常速度低下を判定する場合の効果)
中央装置50は、特定の範囲において所定数を超える車両2が異常な速度低下をしているか否かを判定し、これを検出した場合に交通管理者や道路管理者に報知し、また、路側通信機1を介して当該車両(他車両2B)の近隣を走行する車両(自車両2A)や当該範囲に進入する可能性のある車両(自車両2A)の搭乗者等に報知する。そのため、中央装置50は、その範囲に交通障害となる事象(事故、落下物、渋滞等)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0115】
〔異常方向変化〕
(判定方法)
中央装置50は、所定時間(ここでは1.0秒)ごとの車両2の進行方向の変化に基づいて、車両2についての異常方向変化を判定する。
一例として、車両2の、現在、1周期前、2周期前、及び3周期前の4つの時点の進行方向を用いる場合の条件を以下に示す。
【0116】
中央装置50は、次の条件h1及びh2、条件h3及びh4の双方を満たす場合に、異常進行方向変化の異常事象が発生したと判定する。なお、「進行方向」は、車両2の絶対方向又は緯度経度のいずれか求めることにしてもよい。また、下記条件において、||は絶対値を表す。
【0117】
条件h1:絶対方向比較
|車両2の1周期前進行方向−車両2の現在進行方向|>A8
|車両2の2周期前進行方向−車両2の1周期前進行方向|>A8
|車両2の3周期前進行方向−車両2の2周期前進行方向|>A8
【0118】
条件h2:
特定範囲C8で条件h1を満たしている車両数>D8
【0119】
条件h3:相対方向比較
|車両2の1周期前のタイヤ方向−車両2の現在のタイヤ方向|>B8
|車両2の2周期前のタイヤ方向−車両2Bの1周期前のタイヤ方向|>B8
|車両2の3周期前のタイヤ方向−車両2Bの2周期前のタイヤ方向|>B8
【0120】
条件h4:
特定範囲C8で条件h3を満たしている車両数>D8
【0121】
ここで、上記設定値A8,B8,C8,D8の設定も、人手による設定でもよいが、車両2の車両速度等に応じて動的に変化させてもよい。例えば、車両2の車両速度が比較的大きい場合はA8、B8を小さくし、小さい場合はA8、B8を大きくすることにより、設定値A8、B8を変化させるようにすればよい。また、車両2の車両速度が比較的大きい場合や高速道路ではC8を大きくし、小さい場合や一般道路ではC8を小さくすることにより、C8を変化させるようにすればよい。
【0122】
(異常方向変化を判定する場合の効果)
中央装置50は、特定の範囲において所定数を超える車両2が異常な大きさで進行方向を変化させているか否かを判定し、これを検出した場合に交通管理者や道路管理者に報知し、また、路側通信機1を介して当該車両(他車両2B)の近隣の車両(自車両2A)や当該範囲に進入する可能性のある車両(自車両2A)の搭乗者等に報知する。そのため、中央装置50は、その範囲に交通障害となる事象(事故、落下物、渋滞等)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0123】
〔渋滞状態〕
(判定方法)
中央装置50は、所定時間(ここでは1.0秒)ごとの車両2の位置と速度、及び信号灯器が有る場合には通行権の有無に基づいて、道路の渋滞の有無を判定する。
すなわち、中央装置50は、次の条件j1及びj2を満たす場合に、ある区間において各車両2が渋滞状態にあると判定する。
【0124】
条件j1:
リンクの任意の位置に存在する各車両2の速度<A9
条件j2:
車両2が存在するリンクの下流側に位置する信号灯器が通行可能な現示であること
【0125】
このように、現在の時点における車両の速度と信号灯器の現示とから、その車両2が渋滞状態にあるか否かをリアルタイムに判定する。
さらに、現実の道路の渋滞区間においては、条件j1,j2を満たすことで渋滞状態にある車両2と、設定値A9以上の車両速度ではあるがトロトロと走行している車両2とが混在している場合があるため、以下の条件j3及びj4を満たす区間を渋滞区間と判定する。
条件j3:
同一リンク又は互いに接続されるリンクにおいて条件1を満たす複数の車両2が連続していること
条件j4:
同一リンク又は互いに接続されるリンクにおいて条件1を満たさない連続車両数<B9
【0126】
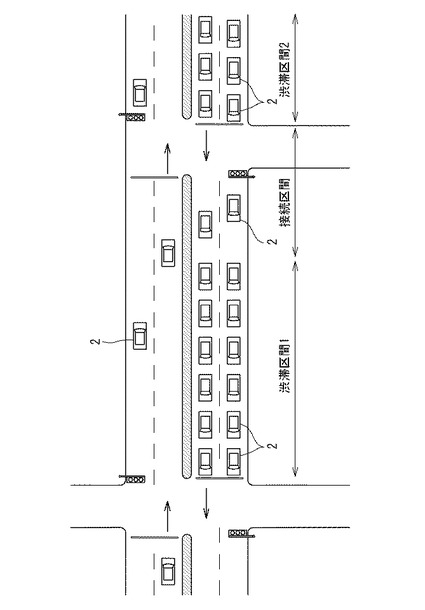
また、条件j3及びj4によって複数の渋滞区間が求められた場合、隣接する渋滞区間を一つの渋滞区間として接続するか、別々の渋滞区間として扱うかの判定を行ってもよい。この判定は、次の条件j5及びj6を満たすか否かによって行うことができる。すなわち、条件j5及びj6を満たす場合に、隣接する渋滞区間を一つの渋滞区間として接続する。なお、以下の条件に含まれる渋滞区間1及び渋滞区間2は、図7に示されるように車両進行方向に互いに隣接する渋滞区間である。
条件j5:接続区間の距離
|下流側の渋滞区間1の最後尾位置−上流側の渋滞区間2の最前列位置|<C9
条件j6:
接続区間における車線当たりの車両台数N<D9
【0127】
設定値C9の値は、好ましくは300m〜500mに設定されるが、これに限られるものではなく、時刻、道路種別、交通量等に応じて適宜変更することができる。
また、設定値D9は、上流側の渋滞区間2の最下流に位置する交差点の処理台数(当該交差点の青時間に停止線を通過しうる車線当たりの最大の車両数)である。例えば、車線当たりの飽和交通流率が、0.5台/秒であり、交差点の青時間が60秒である場合には、処理台数D9は、0.5×60=30(台)となる。そして、接続区間における車両台数Nが、処理台数D9よりも多い場合(N>D9)、当該交差点を青で通過した車両が全て接続区間内に収容できると考えられるので、渋滞区間1と渋滞区間2とを接続しない。接続区間における車両台数Nが、処理台数D9よりも少ない場合(N<D9)は、当該交差点を青で通過した全ての車両が接続区間内に収納しきれないと考えられるので、渋滞区間1と渋滞区間2とを接続し、一つの渋滞区間として取り扱う。
【0128】
(渋滞状態を検出することによる効果)
中央装置50は、同一リンク又は相互に接続されるリンクを走行する車両2が渋滞状態にあるか否かを判定し、これを検出した場合にリンク内の渋滞区間を求め、交通管理者や道路管理者に報知し、また、路側通信機1を介して当該リンクにおける渋滞区間に進入する可能性のある車両2の搭乗者等に報知する。そのため、中央装置50は、渋滞区間の周辺に交通障害となる事象(事故、落下物)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0129】
中央装置50から路側通信機1を介して車両2に送信された各異常事象についての情報は、車両2の車載通信機39によって受信される。各車両2の車載コンピュータ31は、車載通信機39によって受信された情報が、自身が監視の対象とする他車両(監視対象車両)についての情報であるか否かを判断する。受信した情報が監視対象車両についての情報である場合には、その情報を搭乗者に報知し、監視対象車両以外についての情報である場合には、その情報を破棄すればよい。異常事象が発生した車両2(他車両2B)が、当該異常事象による被害を受け得る車両2(自車両2A)の監視対象車両であるか否かは、上記第1の実施形態において図5を参照して説明した条件1〜6を満たすか否かによって判断することができる。
【0130】
〔その他の変形例〕
今回開示した各実施形態はすべての点で例示であって制限的なものではない。本発明の権利範囲は、上述の実施形態ではなく、特許請求の範囲と均等の範囲内でのすべての変更が含まれる。
【0131】
例えば、上述の第1の実施形態では、他車両2Bについての異常事象の判定処理を自車両2Aの車載コンピュータ31が行っているが、その異常事象の判定処理を他車両2Bの車載コンピュータ31が行い、その判定結果を自車両2Aに無線送信することにしてもよい。
もっとも、上述の6種類の異常事象のうち、「異常事態発生」については他車両2Bが自身で判定できないので、自車両2Aの車載コンピュータ31が判定する必要がある。
【0132】
また、上述の第2の実施形態では、車両2の異常事象の判定処理を中央装置50が行っているが、路側通信機1の制御部が行い、その結果を中央装置50や車両2に有線又は無線で送信することにしてもよい。また、第2の実施形態においても、異常速度上昇や異常事態発生を判定対象(監視対象)に加えてもよい。また、中央装置50等が判定した異常事象有りの情報は、交通管制センターにおける信号管理者や道路管理者に報知するに限らず、路上に設置された交通信号制御機、情報提供装置、又はその他の通信手段等に出力することによって信号制御や情報提供のために活用してもよい。
【符号の説明】
【0133】
1 路側通信機
2 車両
2A 自車両
2B 他車両
3 車載装置
31 車載コンピュータ(判定手段)
36 ディスプレイ(報知手段)
37 スピーカー(報知手段)
39 車載通信機(車車間通信手段)
50 中央装置(判定処理装置;判定手段、出力(報知)手段)
【技術分野】
【0001】
本発明は、他車両に生じた異常事象を自車両の搭乗者に報知する交通システムと、このシステムに用いるコンピュータプログラム、並びに異常事象の判定処理装置に関する。
【背景技術】
【0002】
自車両の進行方向の下流側に存在する道路障害や、自車両の近隣の他車両が遭遇した交通事故などの、走行中に生じた異常事象を短時間(数秒以内)で検知する方策は、現状では、ドライバーの視覚と聴覚に依存するところが大きい。
また、近年、人身事故を防止するため、夜間の歩行者の検知を目的とした車載カメラ型の人センサ等が一部で実用化されているが、これ以外の異常検出手段は未だ実用化されていない。
【0003】
そこで、ドライバーの安全運転支援の目的から、現在位置や速度などを含む車両情報(プローブ情報)を車車間通信によって近隣の車両間で交換し、他車両の現在位置を自車両のディスプレイに表示したり、自車両に接近しつつある他車両を検出した場合に衝突の危険性をドライバーに通報したりする、車車間通信を利用した交通安全のための交通システムが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−182207号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載の交通システムでは、他車両が自車両に接近しつつある場合に両者の衝突の危険性を予測する方法であり、他車両が異常な走行を行っているか否かを判定していない。
このため、他車両が比較的安全な挙動である場合でも、自車両のドライバーに衝突の危険性が通報されてしまい、ドライバーに誤った通報がされ易いという欠点がある。
【0006】
本発明は、かかる従来の問題点に鑑み、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知できる交通システム等を提供することを目的とする。
また、車両同士が直接的に通信しない場合であっても、ある車両との関係で発生し得る事故の危険性を別の車両の搭乗者等に正確に報知できる異常事象の判定処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1) 道路上を走行する車両のドライバーは、前方の危険を察知した場合、急ブレーキをかけるか又は急ハンドルを切るなどの通常と大きく異なる動作をする。すなわち、事故に直面する車両には、短時間の間に進行方向に向かった大きな減速が発生したり、進行方向から大きく異なる方向への方向変化が発生したりする。
【0008】
また、実際に車両が事故を起こす(或いは、巻き込まれる)場合も、短時間の間に、急減速や進行方向から大きく異なる方向への方向変化が発生してから、突然に停止して更に進行方向の変化が発生する。
更に、ドライバーが危険を察知せずに事故を起こす場合には、車両には、突然の停止や進行方向の変化が発生し、場合によってはエンジンや電源が急に停止する。本発明の交通システムは、これらの経験則を踏まえて創出されたものである。
【0009】
すなわち、本発明の第1の観点に係る交通システムは、他車両に生じた異常事象を自車両の搭乗者に報知する交通システムであって、前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定する判定手段と、前記判定手段の判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知する報知手段と、を備えていることを特徴とする。
【0010】
本発明の交通システムによれば、判定手段が、他車両の車両情報に基づいて、他車両に関する異常事象の有無を判定し、報知手段が、その判定結果が異常事象ありの場合に、他車両に異常事象が発生したことを自車両の搭乗者に報知するので、例えば、上記に例示したような、事故に繋がる可能性が高い異常事象が他車両に発生した場合に、その発生が自車両の搭乗者に報知される。
このため、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【0011】
(2) 本発明の交通システムは、前記他車両の車両情報又は前記異常事象ありの情報を、前記他車両から前記自車両に送信する車車間通信手段をさらに備えていることが好ましい。
【0012】
このような構成によって、車車間通信を介して他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【0013】
(3) 本発明の交通システムにおいて、具体的には、前記異常事象には、前記自車両から見て前記他車両の速度が異常に高速である異常高速走行を含めることができる。
この場合、前記判定手段が、前記他車両の速度から前記自車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも大きい場合に、前記異常高速走行があったと判定すれば、当該異常高速走行の発生を正確に判定することができる。
【0014】
(4) 本発明の交通システムにおいて、前記異常事象には、更に、前記自車両から見て前記他車両の速度が異常に低速である異常低速走行が含まれることが好ましい。
この場合、前記判定手段が、前記自車両の速度から前記他車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも小さい場合に、前記異常低速走行があったと判定すれば、当該異常低速走行の発生を正確に判定することができる。
【0015】
(5) 本発明の交通システムにおいて、前記異常事象には、前記他車両が異常に大きい加速度で急加速する異常速度上昇が含まれていてもよい。
この場合、前記判定手段が、前記他車両の絶対加速度が所定値よりも大きく、前記他車両の絶対加速度から前記自車両の絶対加速度を引いた相対加速度が所定値よりも大きい場合に、前記異常速度上昇があったと判定すれば、当該異常速度上昇を正確に判定することができる。
【0016】
(6) 本発明の交通システムにおいて、前記異常事象には、更に、前記他車両が異常に大きい減速度で急減速する異常速度低下が含まれることが好ましい。
この場合、前記判定手段は、前記他車両の絶対減速度が所定値よりも大きい場合に、前記異常速度低下があったと判定すれば、当該異常速度低下の発生を正確に判定することができる。
【0017】
(7) 本発明の交通システムにおいて、前記異常事象には、前記他車両が異常に大きい速度で進行方向を変化させる異常方向変化が含まれていてもよい。
この場合、前記判定手段は、前記他車両の進行方向変化速度の絶対値が所定値よりも大きく、前記他車両のタイヤ方向変化速度の絶対値が所定値よりも大きい場合に、前記異常方向変化があったと判定すれば、当該異常方向変化の発生を正確に判定することができる。
【0018】
(8)(9) 本発明の交通システムにおいて、前記異常事象には、更に、前記他車両についての異常事態発生が含まれていることが好ましい。
この場合、前記判定手段は、前記自車両の監視エリア内にある前記他車両のシステム情報が異常である場合に、前記異常事態発生があったと判定することができる。或いは、前記判定手段は、前記自車両の監視エリア内にある前記他車両から正常終了を受信せずに、車両情報を受信できなくなった場合に、前記異常事態発生があったと判定してもよい。これらのいずれも場合も、当該異常事態発生を正確に判定することができる。
【0019】
(10) 本発明の第2の観点に係るコンピュータプログラムは、他車両に生じた異常事象を自車両の搭乗者に報知する処理を、車載コンピュータに実行させるためのコンピュータプログラムであって、上述の(1)〜(8)に記載した交通システムと実質同一の発明である。
このため、本発明のコンピュータプログラムは、上述の(1)〜(9)に記載した交通システムと同様の作用効果を奏する。
【0020】
(11) 本発明の第3の観点に係る異常事象の判定処理装置は、道路を走行する車両から送信された車両情報を受信する受信部と、受信した車両情報に基づいて、当該車両に関する異常事象の有無を判定する判定手段と、前記判定手段の結果が異常事象ありの場合、当該車両に異常事象が発生したことを所定の対象に対して出力する出力手段と、を備えていることを特徴とする。
【0021】
本発明の第3の観点に係る異常事象の判定処理装置によれば、判定手段が、道路を走行する車両から送信された車両情報に基づいて、当該車両に関する異常事象の有無を判定し、出力手段が、その判定結果が異常事象ありの場合に、当該車両に異常事象が発生したことを所定の対象に出力する。そのため、所定の対象を車両(自車両)とした場合には、事故に繋がる可能性が高い異常事象が他車両に発生したときに、その発生を自車両の搭乗者に報知することができる。また、判定処理装置は、道路交通に関する情報の収集、分析等を行う交通管制センターに設置することができ、この場合、車両に発生した異常事象を所定の対象としての交通管理者や道路管理者に報知し、信号制御や道路管理のために異常事象の判定結果を活用することができる。また、判定処理装置は、異常事象が発生したことを路上に設置されている交通信号制御機に出力することができ、その情報をもとに信号制御を実行させることができる。
なお、判定処理装置と車両との間の通信は、両者の間で直接的に行われてもよいし、道路に設置された路側通信機を介して行われてもよい。出力手段は、判定結果についての情報を車両の車載装置に送信し、この車載装置におけるディスプレイやスピーカー等の出力装置を介して搭乗者に報知する構成であってもよい。
【0022】
(12) 本発明の第4の観点に係る交通システムにおいて、前記異常事象には、前記車両が渋滞状態にあることが含まれることが好ましい。
この場合、前記判定手段が、前記車両が異常に低速で走行し、かつ走行方向下流側の信号が通行可能な現示である場合に、当該車両が渋滞状態にあると判定すれば、当該渋滞状態を信号の現示の状態に応じてリアルタイムに判定することができる。
【発明の効果】
【0023】
以上の通り、本発明によれば、他車両との関係で発生し得る事故の危険性を、自車両の搭乗者に正確に報知することができる。
【図面の簡単な説明】
【0024】
【図1】交差点において交差する道路の斜視図である。
【図2】車載装置の構成例を示すブロック図である。
【図3】車車間通信の有効範囲と通信内容を示す道路平面図である。
【図4】車載コンピュータによる異常予告処理のフローチャートである。
【図5】監視対象車両と走行リンクとの位置関係を示す道路平面図である。
【図6】図5の各車両が送信する車両情報の一例を示す表である。
【図7】車両の渋滞状態を示す道路平面図である。
【発明を実施するための形態】
【0025】
以下、図面を参照しつつ、本発明の実施形態を説明する。
〔用語の定義〕
本発明の実施形態を説明するに当たり、まず、本明細書で用いる用語の定義を行う。
「車両」:道路を通行する車両全般、具体的には、道路交通法上の車両のことをいう。同法上には、自動車、原動機付自転車、軽車両及びトロリーバスが含まれる。
【0026】
「自車両」:車両通行に障害を与え得る事象(以下、「障害事象」という。)を搭乗者に報知する側の車両のことをいう。
「他車両」:自車両にとって障害事象の原因となり得る他の車両のことをいう。
「流入リンク」「流出リンク」:ある交差点から見て、当該交差点に向かって流入する方向のリンクのことを流入リンクといい、ある交差点から見て、当該交差点から流出する方向のリンクのことを流出リンクという。
【0027】
「プローブ情報」:実際に道路を走行する車両から得られる、当該車両に関する各種の車両情報のことをいう。この車両情報は、フローティングカーデータ(Floating Car Data :FCD)と言われる場合もあり、車両2の絶対位置、瞬間速度、進行方位及びこれらの発生時刻のデータが含まれる。
なお、後述の通り、本実施形態のプローブ情報には、車両種別、タイヤ方向及びシステム状態などの情報も含まれる。
【0028】
〔第1の実施形態〕
〔システムの全体構成〕
図1は、交差点Jにおいて交差する道路R1,R2の斜視図である。
図1において、上り下り各2車線の道路R1と、同じく上り下り各2車線の道路R2とは、交差点Jで互いに交差している。なお、2つの道路R1,R2の車線数は片側2車線に限られるものではない。
【0029】
図1に示すように、交差点Jのコーナー部の近傍には、各道路R1,R2に通行権を与える信号灯器が設置されている。また、当該交差点Jと図示しない他の交差点の近傍に、車両2と無線通信が可能な路側通信機(ITS無線機)1が設置されている。
本実施形態の交通システムは、複数の車両2の車載装置3(図2参照)と、この車載装置3の車載通信機39と無線通信する路側通信機1とを含む。なお、車両2と無線通信を行う路側通信機1は、赤外線信号を利用した光ビーコン(図示せず)であってもよい。
【0030】
本実施形態の交通システムでは、他の交差点に設置された路側通信機1との無線通信(路路間通信)に無線通信が用いられ、路側通信機1と車載通信機39との間(「路」から「車」への路車間通信と「車」から「路」への車路間通信との双方を含む。)と車載通信機39同士(車車間通信)についても、無線通信が用いられている。
なお、交通管制センターに設けられた中央装置50(図2参照)は、各路側通信機1と有線または無線での双方向通信が可能となっている。
【0031】
路側通信機1は、自身が無線送信するための専用のタイムスロットをTDMA(Time Division Multiple Access )方式で割り当てており、このタイムスロット以外の時間帯には無線送信を行わない。従って、路側専用のタイムスロット以外の時間帯は、車載通信機39のためのCSMA方式による送信時間として開放されている。
なお、路側通信機1は、自身の送信タイミングを制御するために、例えば、自身の時計をGPS時刻に合わせて他の路側通信機1と時刻同期を図る機能を有している。
【0032】
〔車載装置の構成〕
図2は、車載装置3の構成例を示すブロック図である。
図2に示すように、本実施形態の車載装置3は、車載コンピュータ31、GPS受信機32、車速センサ33、ジャイロセンサ34、記憶装置35、ディスプレイ36、スピーカー37、入力デバイス38及び車載通信機39を備えている。
【0033】
車載コンピュータ31は、車両2の経路探索と車内の他の電子機器32〜39の動作制御とを行う電子制御装置である。この車載コンピュータ31は、GPS受信機32が定期的に取得するGPS信号により自車の絶対位置を求めるとともに、車速センサ33及びジャイロセンサ34から随時入力される入力信号に基づいて、その位置及び方位を補完し、車両2の正確な現在位置及び方位を常に把握している。
GPS受信機32、車速センサ33及びジャイロセンサ34は、車両2の走行位置、速度及び向きを把握するセンサ類である。
【0034】
記憶装置35は、地図データベースを備える。この地図データベースは、車載コンピュータ31に道路地図データを提供するものであり、この道路地図データはリンクデータやノードデータを含み、DVDなどの記録媒体に格納されている。
記憶装置35は、車載コンピュータ31からの指令に応じて記録媒体から必要な道路地図データを読み出して当該コンピュータ31に提供する。記録媒体としては、DVD以外にも、CD−ROMやメモリカード、ハードディスク等の種々の記録媒体を採用できる。
【0035】
ディスプレイ36とスピーカー37は、車載コンピュータ31が生成した各種情報を車両2の搭乗者に提示するための出力装置である。
具体的には、ディスプレイ36は、経路探索の際の入力設定画面、自車周辺の地図画像及び目的地までの経路情報等を表示し、スピーカー37は、車両2を目的地に誘導するためのアナウンスを音声出力する。また、これらの出力装置は、ダウンリンク情報に含まれる中央装置50などからの交通情報をドライバーに提示することもできる。
【0036】
入力デバイス38は、車両2のドライバーが経路探索に関する各種入力を行うためのものであり、操舵ハンドルに設けられた操作スイッチ、ジョイスティック、或いは、ディスプレイ36に設けたタッチパネル等の各種入力手段の組み合わせよりなる。
なお、ドライバーの音声認識によって入力を受け付ける音声認識装置を、入力デバイス38とすることもできる。この入力デバイス38にドライバー等の搭乗者が行った入力信号は車載コンピュータ31に送られる。
【0037】
車載通信機39は、ITS無線機(光ビーコンでもよい。)よりなる路側通信機1との間の路車間通信を通じて、車載コンピュータ31が生成したアップリンク情報をその路側通信機1に送信し、信号灯器を制御する交通信号制御機が中央装置50から取得した、所定の交通情報を含むダウンリンク情報を、路側通信機1から受信する。
【0038】
車載コンピュータ31は、各種の制御プログラムを実装したマイクロコンピュータなどの演算処理装置より構成されている。
車載コンピュータ31は、上記制御プログラムを実行することにより、ディスプレイ36に地図画像を表示させる機能、出発地から目的地までの経路(中継地がある場合はその位置を含む。)を算出する機能、その経路に従って車両2を目的地まで誘導する機能等、各種のナビゲーション機能を実行可能である。
【0039】
また、車載コンピュータ31は、自車両2の車両情報と他車両2から取得した車両情報とを用いて他車両2の異常事象を判定し、判定した異常事象を自車両2の搭乗者に報知する、異常予告処理を実行可能であるが、この処理の詳細は後述する。
なお、以下においては、「自車両」と「他車両」の識別を容易にするため、自車両2の符号を「2A」とし、他車両2の符号を「2B」とする。
【0040】
〔車両情報のデータ収集〕
図3は、車車間通信の有効範囲と通信内容を示す道路平面図である。
図3に示すように、各車両2が車車間通信する場合の有効範囲は、送信元の車両2を中心とした200〜300m程度の送信有効半径の円内の範囲である。
また、垂直方向の伝達有効範囲は、仰角で水平方向から±6〜10度程度(実用的な道路の最大勾配に対して余裕を考慮した値)に設定すればよい。この数値は、道路構造令における道路の最大勾配12%のうち、設計速度60km/h以上の実用的な勾配8%を対象とした場合の道路勾配(=約5度)に対して、余裕を考慮した値である。
【0041】
このように、垂直方向の伝達有効範囲を限定すれば、自車両2Aが走行する平面とは別の平面を走行する車両(例えば、自車両2Aが平地の道路を走行しているときに、高架道路を走行する車両)からの車両情報を誤って受信するのを防止できる利点がある。
ただし、垂直方向の伝達有効範囲が設定されていると、横転や逆立ち等をした他車両2Bからの車両情報を自車両2Aが受信できない可能性がある。そこで、かかる不都合の回避策として、次の2つの方策(これらの方策を組み合わせてもよい)が考えられる。
【0042】
すなわち、第1の方策は、垂直方向の伝達有効範囲を原則的に設定するが、異常事象が発生した場合に、垂直方向の伝達有効範囲を解除し、垂直方向に無指向性で電波を送信する方策である。
また、第2の方策は、垂直方向の伝達有効範囲を原則として設定せず、垂直方向に無指向性で電波を送信するが、異常事象が生じた他車両2Bが走行していたリンクと、自車両2Aのリンクとの関連性を自車両2Aが判断し、自車両2Aと関連のあるリンク上の他車両2Bについてのみ異常事象の判定対象とする方策である。
【0043】
本実施形態では、各車両2の車載コンピュータ31は、次のa)〜h)のデータを含む車両情報(プローブ情報)を生成し、車載通信機39に所定時間ごとに送信させる。従って、車車間通信の有効範囲内にある車両2は、通信の相手方の車両2から送信されたa)〜h)のデータ含む車両情報をお互いに取得する。
走行中に他車両2Bの異常事象を正確に検知するためには、車両情報を送信する時間間隔はできるだけ短い間隔が望ましく、例えば、1.0秒より短い間隔であることが好ましい。なお、本実施形態では、当該時間間隔を0.1秒とする。
【0044】
a)現在時刻
時、分、秒(0.1秒単位)
b)車両ID
車両2の識別情報である。車両IDは必ずしも含まれていなくてもよいが、含める場合には、ランダムな数値が望ましい。ただし、表現形式は問わない。
c)車両種別
原付2輪、自動2輪、軽自動車、普通自動車、貨物自動車、大型乗合自動車、大型貨物自動車等の種別を表す情報である。
【0045】
d)瞬間速度
車両2の絶対速度を表す情報である。
e)絶対位置
車両2の位置を表す情報である。緯度経度、或いは、走行リンク番号とそのリンクの位置等によって表現される。
f)進行方向
車両2の方位を表す情報である。
【0046】
g)タイヤ方向(蛇角方向)
進行方向と主タイヤの方向とのなす角度を表す情報である。
h)システム状態
車両2のシステム状態を表す情報である。システム情報の種別には、「正常」、「異常」及び「正常停止」がある。このうち、「正常」は、車両2の駆動系統や電気系統がすべて正常に動作していることを示す情報であり、「異常」は、走行に支障を来す異常事態が車両2に発生したことを示す情報である。
【0047】
また、「正常停止」は、ドライバーの操作で車両2の駆動系統と電気系統を正常に停止させる場合に、車載通信機39が電源停止前に最後に送信する情報である。
なお、システム状態の異常の具体例としては、車両2が急傾斜で走行不能となる異常停止の場合や、異常な電源の喪失の場合がある。電源の喪失の場合には、車両情報を送信する車載通信機39が、最終情報送信用の予備バッテリー(発信は数回分でよい)により、システム状態が「異常」であることを送信すればよい。
【0048】
上記のa)〜h)の各データは、現在時刻に、当該現在時刻におけるリアルタイムの車両情報(単一情報)として送信される。
或いは、a)〜h)の各データは、現在時刻に、複数周期分の車両情報を纏めた複数情報(例えば、現時刻の、1周期前(0.1秒前)、2周期前(0.2秒前)……5周期前(0.5秒前)など)として送信することもできる。車両情報の送信間隔は、単一情報であれ複数情報であれ、0.1秒ごとに個々の車両2から送信される。
【0049】
なお、ジャイロセンサなどの方向検出装置で自車両2Aの姿勢を判定しておき、自車両2Aが通常と大きく異なる傾斜状態(例えば、異常な急傾斜や車両転倒などの状態)になった場合に、垂直方向の伝達有効範囲(本実施形態では、仰角15度)を解除し、システム状態の「異常」を送信することにしてもよい。
また、車両情報を無指向で発信してもよい。この場合、受信した車両情報に含まれる絶対位置と自車両2Aの絶対位置とから、自車両2Aが走行する平面とは別の平面を走行する他車両2Bからの車両情報かどうかを判定し、別の平面の他車両2Bからの車両情報を破棄することにより、自車両2Aの事故と無縁な他車両2Bの車両情報を排除できる。
【0050】
〔異常予告処理のフローチャート〕
図4は、車載コンピュータ31による異常予告処理のフローチャートである。
自車両2Aの車載コンピュータ31は、図4に示す処理を所定の制御周期(例えば、0.1秒)ごとに行う。
まず、車載コンピュータ31は、他車両2Bのプローブ情報(車両情報)を受信したか否かを繰り返し判定する(ステップST1)。
【0051】
次に、車載コンピュータ31は、他車両2Bのプローブ情報(車両情報)を受信した場合には、その他車両2Bが監視対象車両か否かを探索する「監視対象処理」を行い(ステップST2)、他車両2Bが監視対象車両ではない場合は処理を終了する。
車載コンピュータ31は、他車両2Bが監視対象車両である場合は、その車両について「異常事象の判定処理」を行う(ステップST3)。なお、かかる監視対象処理と異常事象の判定処理の詳細については、後述する。
【0052】
車載コンピュータ31は、上記判定処理において異常と判定された車両2があるか否かを判断し(ステップST4)、異常と判定された車両2がある場合は、搭乗者への報知処理を行い(ステップST5)、異常と判定された車両2がない場合は、その報知処理を行わずに処理を終了する。
上記報知処理は、自車両2Aのドライバーを含む搭乗者に、例えば、「近隣に異常事象あり。注意してください。」などの旨をディスプレイ36やスピーカー37から出力したり、チャイム等の警告音を発したりすることによって行われる。
【0053】
〔監視対象処理〕
図5は、監視対象車両と走行リンクとの位置関係を示す道路平面図である。また、図6は、図5の各車両が送信する車両情報の一例を示す表である。
なお、図5及び図6では、自車両2Aの符号を「A」と記載し、合計7台の他車両2Bの符号をそれぞれ「B1」〜「B7」と記載している。
【0054】
自車両Aの車載コンピュータ31は、他車両B1〜B7からそれぞれ取得した車両情報の位置情報に基づいて、他車両B1〜B7が次の条件1〜6に該当するか否かを判定し、その条件1〜6を満たす他車両を監視対象車両とし、その条件1〜6を満たさない他車両については、監視対象車両から外す。これが、車載コンピュータ31が行う監視対象処理である。
なお、条件1〜5は、これらのうちのいずれかが充足されれば足りるOR条件であり、条件6は、必ず充足されるべき必要条件である。
【0055】
条件1:
自車両Aと同じリンク(図5のリンク0002)を走行する車両であること。図5の車両B2がこれに相当する。
条件2:
自車両Aのリンク(図5のリンク0002)と同じ方向でかつその上流ノードに接続する流入リンク(図5のリンク0001)、或いは、自車両Aのリンクと同じ方向でかつその下流ノードに接続する流出リンク(図5のリンク0003)を走行する車両であること。図5の車両B1,B3がこれに相当する。
【0056】
条件3:
自車両Aのリンク(図5のリンク0002)の下流ノードに接続する流入リンク(図5のリンク0401)を走行する車両であること。図5の車両B6がこれに相当する。
条件4:
自車両Aのリンク(図5のリンク0002)に対向するペアリンク(図5のリンク0102)を走行する車両であること。図5の車両B4,B5がこれに相当する。
【0057】
条件5:
自車両Aのリンク(図5のリンク0002)に対向するペアリンク(図5のリンク0102)と同じ方向でかつその上流ノードに接続する流入リンク(図5のリンク0103)を走行する車両であること。図5の車両B8がこれに相当する。
条件6:
「監視エリア」又は「移行エリア」内の車両であること。
例えば、自車両Aから半径100〜200m以内の円形エリアを「監視エリア」とし、監視エリアの外側50mの程度の範囲を「移行エリア」とする。
【0058】
図5では、条件1〜5に対応するリンクを実線の矢印で示し、条件1〜5に対応しないリンクを破線の矢印で示している。従って、他車両B7については、条件1〜5のいずれにも該当しないので、監視対象車両から外される。
もっとも、監視対象車両を選定する条件設定としては、自車両Aが走行中のリンクとの関係を考慮する条件1〜5を設定せずに条件6のみとし、監視エリアと移行エリア内の全方位に位置する他車両B1〜B8を監視対象車両とすることにしてもよい。
【0059】
なお、「リンク」は各車両2が情報共有できるリンク番号であればよく、例えばVICS(「VICS」は登録商標である。)リンクやDRMリンクが該当する。
また、車車間通信は自車両Aを基準とする場合、最大で200〜300mの範囲で通信することになるが、他車両B1〜B7が死角にあって直接的に把握できない可能性もある。このような場合の他車両B1〜B7の車両情報は、他の車両2や路側通信機1を中継して間接的に受信することにすればよい。
【0060】
〔異常事象の種類と監視理由〕
上述の通り、自車両2Aの車載コンピュータ31は、自車両2Aから見て監視対象車両に該当する他車両2Bについて、所定の異常事象の有無を所定の制御周期(例えば0.1秒)で判定する。
その異常事象の種類は、「異常高速走行」、「異常低速走行」、「異常速度上昇」、「異常速度低下」、「異常方向変化」及び「異常事態発生」の6種類がある。その種類ごとの簡単な内容と、その種類を監視する理由を列挙すると、次の通りである。
【0061】
1)異常高速走行:自車両2Aから見て他車両2Bの速度が異常に高速である事象である。例えば、高速道路においてこのような他車両2Bが自車両2Aの後方にあると、自車両2Aが他車両2Bに追突される可能性があるからである。
2)異常低速走行:自車両2Aから見て他車両2Bの速度が異常に低速である事象である。例えば、高速道路においてこのような他車両2Bが自車両2Aの前方にあると、自車両2Aが他車両2Bに追突する可能性があるからである。
【0062】
3)異常速度上昇:他車両2Bが異常に大きい加速度で急加速する事象である。このような他車両2Bは、事故を発生させる可能性が高いからである。
4)異常速度低下:他車両2Bが異常に大きい減速度で急減速する事象である。このような他車両2Bは、障害物による急制動や事故を誘発しかねない制動と考えられるからである。
【0063】
5)異常方向変化:他車両2Bが異常に大きい速度で進行方向を変化させる事象である。このような他車両2Bは、障害物の回避行動として急ハンドルを切ったと推定でき、後続車の事故を誘発し易いからである。
6)異常事態発生:他車両2Bの異常状態を示すシステム情報を取得したり、他車両2Bの車両情報を正常でなく喪失したりする事象である。このような他車両2Bは、緊急事態による情報発信のために停止、或いは、事故により停止したと考えられるからである。
【0064】
なお、自車両2Aの車載コンピュータ31は、0.1秒周期で車両情報を自車から送信及び受信するが、他車両2Bの異常事象を監視する場合、これらを現在情報と過去数周期分(過去5周期の場合、1周期=0.1秒なので0.6秒分)の車両情報を保持し、受信ごとに最も古い車両情報を破棄して最新情報に更新する。
以下、車載コンピュータ31が行う各種の異常事象の判定方法と、その異常事象を判定する場合の効果を説明する。
【0065】
〔異常高速走行〕
(判定方法)
自車両2Aの車載コンピュータ31は、自車両2Aと他車両2Bの相対速度の相違に基づいて、異常高速走行を判定する。本実施形態では、この判定を、異なる複数周期の車両速度を比較することによって行う。
一例として、自車両2Aと他車両2Bの、現在、1周期前及び2周期前の3つの時点の車両速度を用いる場合の条件を、以下に示す。
【0066】
すなわち、車載コンピュータ31は、次の条件a1及びa2の双方を満たす場合に、異常高速走行の異常事象が発生したと判定する。
条件a1:
現在時刻において、他車両速度−自車両速度>A1
1周期前の時刻において、他車両速度−自車両速度>A1
2周期前の時刻において、他車両速度−自車両速度>A1
条件a2:
他車両速度−制限速度(指定最高速度又は法定最高速度)>B1
【0067】
ここで、上記の設定値A1,B1の設定は、人手による設定でもよく、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、情報受信範囲内の平均速度、道路種別などに応じて動的に変化させてもよい。
例えば、受信範囲での車両平均速度が低速の場合(例えば、渋滞の場合)は、B1を小さくし(0又は負値)、高速の場合はB1を大きくする(0又は正値)ことにより、設定値B1を変化させるようにすればよい。
【0068】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常高速走行の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが高速で走行していても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常高速走行の判定を行うようにしてもよい。自車両2Aの後方から走行してくる他車両2Bがほとんどブレーキをかけることなく高速で追突するケース等があり得るからである。
【0069】
(異常高速走行を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、自車両2Aよりも異常に高速で走行する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの後方にある場合は、自車両2Aが追突される可能性を報知でき、他車両2Bが自車両2Aの前方にある場合は、他車両2Bが追突事故を起こす可能性を報知でき、交通事故の低減に貢献できる。また、自車両2Aが追い越し車線を走行中は、走行車線への移行を推奨でき、交通の円滑化にも寄与できる。
【0070】
〔異常低速走行〕
(判定方法)
自車両2Aの車載コンピュータ31は、自車両2Aと他車両2Bの相対速度の相違に基づいて、異常高速走行を判定する。本実施形態では、この判定についても、異なる複数周期の車両速度を比較することによって行われる。
一例として、自車両2Aと他車両2Bの、現在、1周期前及び2周期前の3つの時点での車両速度を用いる場合の条件を、以下に示す。
【0071】
すなわち、車載コンピュータ31は、次の条件b1及びb2の双方を満たす場合に、異常低速走行の異常事象が発生したと判定する。
条件b1:
現在時刻において、自車両速度−他車両速度>A2
1周期前の時刻において、自車両速度−他車両速度>A2
2周期前の時刻において、自車両速度−他車両速度>A2
条件b2:
他車両速度−制限速度(指定最高速度または法定最高速度)<B2
【0072】
ここで、上記の設定値A2,B2の設定も、人手による設定でもよいが、自車両2Aの速度、最高速度(指定最高速度又は法定最高速度)、道路種別などに応じて動的に変化させてもよい。
例えば、受信範囲での車両平均速度が低速の場合(渋滞の場合)は、B2を小さくし(0又は負値)、高速の場合はB2を大きくする(0又は正値)ことにより、設定値B1を変化させるようにすればよい。
【0073】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常低速走行の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが低速で走行していても、自車両2Aの事故に繋がる可能性が少ないからである。
【0074】
(異常低速走行を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、自車両2Aよりも異常に低速で走行する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方にある場合は、自車両2Aが他車両2Bに追突する可能性を報知でき、交通事故の低減に貢献できる。
【0075】
〔異常速度上昇〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両速度の変化に基づいて、他車両2Bについての異常速度上昇を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
【0076】
すなわち、車載コンピュータ31は、次の条件c1及びc2の双方を満たす場合に、異常速度上昇の異常事象が発生したと判定する。
条件c1:絶対加速度比較
他車両2Bの現在速度−他車両2Bの1周期前速度>A3
他車両2Bの1周期前速度−他車両2Bの2周期前速度>A3
他車両2Bの2周期前速度−他車両2Bの3周期前速度>A3
【0077】
条件c2:相対加速度比較
(他車両2Bの現在速度−他車両2Bの1周期前速度)−(自車両2Aの現在速度−自車両2Aの1周期前速度)>B3
(他車両2Bの1周期前速度−他車両2Bの2周期前速度)−(自車両2Aの1周期前速度−自車両2Aの2周期前速度)>B3
(他車両2Bの2周期前速度−他車両2Bの3周期前速度)−(自車両2Aの2周期前速度−自車両2Aの3周期前速度)>B3
【0078】
ここで、上記の設定値A3,B3の設定も、人手による設定でもよいが、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、或いは、受信範囲内の平均速度などに応じて動的に変化させてもよい。
例えば、受信範囲内の車両平均速度が低速の場合(渋滞の場合)は、B3を小さくし(0又は正値)、低速の場合はB3を大きくする(0又は正値)することにより、設定値B3を変化させるようにすればよい。
【0079】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常速度上昇の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、近隣の他車両2Bが急加速を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常速度上昇の判定を行うようにしてもよい。自車両2Aに後続する他車両2Bが急加速することによって自車両2Aに追突するケース等があり得るからである。
【0080】
(異常速度上昇を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な加速度で急加速する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの後方にある場合は、自車両2Aが追突される可能性を報知でき、他車両2Bが自車両2Aの前方にある場合は、他車両2Bが追突事故を起こす可能性を報知でき、交通事故の低減に貢献できる。
【0081】
なお、上記の異常速度上昇の判定方法において、他車両2Bの絶対加速度についての条件c1だけでなく、他車両2Bと自車両2Aの相対加速度についての条件c2を含める理由は、例えば、信号待ちの自車両2Aと他車両2Bが青開始時点で同時に発進を行うような場合は、交通事故に繋がる可能性が低いため、このような場合を異常事象から外すためである。
【0082】
〔異常速度低下〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両速度の変化に基づいて、他車両2Bについての異常速度低下を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
【0083】
すなわち、車載コンピュータ31は、次の条件d1を満たす場合に、異常速度低下の異常事象が発生したと判定する。
条件d1:絶対減速度比較
他車両2Bの1周期前速度−他車両2Bの現在速度>A4
他車両2Bの2周期前速度−他車両2Bの1周期前速度>A4
他車両2Bの3周期前速度−他車両2Bの2周期前速度>A4
【0084】
ここで、上記の設定値A4の設定も、人手による設定でもよいが、自車両2Aの速度、制限速度(指定最高速度又は法定最高速度)、受信範囲内での平均速度などに応じて動的に変化させてもよい。
例えば、他車両2Bの車両速度が比較的大きい場合は、A4を小さくし、小さい場合はA4を大きくすることにより、設定値A4を変化させるようにすればよい。
【0085】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常速度低下の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bが急減速を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
ただし、自車両2Aの速度が0の場合や極めて停止に近い速度以下の場合であっても、異常速度低下の判定を行うようにしてもよい。自車両2Aに後続する他車両2Bが急ブレーキをかけて急減速しつつ自車両2Aに追突するケース等があり得るからである。
【0086】
(異常速度低下を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な減速度で急減速する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合は、自車両2Aの前方に交通障害となる事象(例えば、事故、落下物又は渋滞など)が存在する可能性があることを報知でき、交通事故の低減に貢献できる。
【0087】
なお、上記の例では、現在から3周期前(0.1秒周期の場合は0.3秒前)の速度情報を用いて減速度を判定したが、これより多い速度情報を用いてもよい。
もっとも、例えば、時速100km/hで走行中の場合に急制動をかけた場合は制動時間が約2秒と短いことから、判定する周期数を余り多くしても、却って判定精度が悪くなる場合がある。
【0088】
〔異常方向変化〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの進行方向の変化に基づいて、他車両2Bについての異常方向変化を判定する。
一例として、他車両2Bの、現在、1周期前、2周期前及び3周期前の4つの時点の進行方向を用いる場合の条件を以下に示す。
【0089】
すなわち、車載コンピュータ31は、次の条件e1及びe2の双方を満たす場合に、異常進行方向変化の異常事象が発生したと判定する。
なお、「進行方向」は、車両2の「絶対方向」又は「緯度経度」のいずれから求めることにしてもよい。また、下記の条件において、||は絶対値を表す。
【0090】
条件e1:絶対方向比較
|他車両2Bの1周期前進行方向−他車両2Bの現在進行方向|>A5
|他車両2Bの2周期前進行方向−他車両2Bの1周期前進行方向|>A5
|他車両2Bの3周期前進行方向−他車両2Bの2周期前進行方向|>A5
【0091】
条件e2:相対方向比較
|他車両2Bの1周期前のタイヤ方向−他車両2Bの現在のタイヤ方向|>B5
|他車両2Bの2周期前のタイヤ方向−他車両2Bの1周期前のタイヤ方向|>B5
|他車両2Bの3周期前のタイヤ方向−他車両2Bの2周期前のタイヤ方向|>B5
【0092】
ここで、上記の設定値A5,B5の設定も、人手による設定でもよいが、他車両2Bの車両速度に応じて動的に変化させてもよい。
例えば、他車両2Bの車両速度が比較的大きい場合は、A5を小さくし、小さい場合はA5を大きくすることにより、設定値A5を変化させるようにすればよい。
【0093】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常方向変化の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bが急な方向変化を行っても、自車両2Aの事故に繋がる可能性が少ないからである。
また、車載コンピュータ31は、受信範囲内の車両2の平均速度が比較的低速の場合(渋滞の場合)にも、異常方向変化の判定を行わない。その理由は、交通渋滞の場合には、他車両2Bの異常方向変化による事故の可能性が殆どないからである。
【0094】
(異常方向変化を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、異常な大きさで急に進行方向が変化する近隣の他車両2Bの有無を判定し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合には、自車両2Aの前方に交通障害となる事象(例えば、事故、落下物又は渋滞など)が存在する可能性があることを報知でき、交通事故の低減に貢献できる。
【0095】
〔異常事態発生〕
(判定方法)
自車両2Aの車載コンピュータ31は、所定時間(ここでは0.1秒)ごとの他車両2Bの車両情報の受信状態と、その車両情報に含まれるシステム状態とに基づいて、他車両2Bについての異常事態発生を判定する。
具体的には、車載コンピュータ31は、以下の開始条件S1〜S3を満たす他車両2Bを検出した場合に、その他車両2Bを異常事態発生の監視対象とする。
【0096】
開始条件S1:
自車両2Aの停止時(又は渋滞時)に監視エリア内に存在する他車両2Bであって、自車両2Aが走行を開始した時(非渋滞状態になった時)に、監視エリア内に存在する他車両2B
【0097】
開始条件S2:
自車両2Aの走行時に移行エリアに存在(又は出現)し、監視エリアに移動した他車両2B
開始条件S3:
自車両2Aが走行している場合に監視エリアに出現した他車両2B(理由は不明でも、移行エリアを経由しない場合も含む。)
【0098】
また、車載コンピュータ31は、自車両2Aが以下の終了条件E1を満たす場合、或いは、以下の終了条件E2又はE3のいずれかを満たす他車両2Bを、異常事態発生の監視対象から除外する。
【0099】
終了条件E1:
自車両2Aが停止した場合(又は渋滞になった場合)
終了条件E2:
自車両2Aの走行時に監視エリアに存在(又は出現)し、移行エリアに移動した他車両2B
終了条件E3:
自車両2Aの監視エリア又は移行エリアに存在する他車両2Bであって、システム状態が「正常終了」である車両情報を送信した他車両2B
【0100】
そして、自車両2Aの車載コンピュータ31は、上記開始条件S1〜S3のいずれかを満たす監視対象の他車両2Bが、次の条件f1,f2のいずれかを満たす場合に、当該他車両2Bに異常事態発生の異常事象が生じた判定をする。
【0101】
条件f1:
システム状態が「異常」である車両情報を他車両2Bから受信した場合。現時点でのシステム状態が「正常」であり、次周期以後に監視エリア内でのシステム状態が「異常」となった場合を含む。
条件f2:
監視エリア内において、他車両2Bから「正常終了」を受信せずに、車両情報を受信できなくなった場合。なお、この条件f1,f2の判定は、単一周期又は連続した複数周期のいずれで判定してもよい。
【0102】
なお、車載コンピュータ31は、自車両2Aの速度が0(停止中)の場合や、極めて停止に近い速度以下の場合には、異常事態発生の判定を行わない。
その理由は、自車両2Aが停止又は殆ど停止している場合は、他車両2Bからシステム情報が異常である車両情報を取得したり、他車両2Bの車両情報が不正常に消失したりしても、事故に繋がる可能性が少ないからである。
また、車載コンピュータ31は、移行エリア内でシステム状態が変化した場合や、他車両2Bの受信状態が未確認の場合も、異常事態発生の判定を行わない。
【0103】
(異常事態発生を判定する場合の効果)
上記の通り、自車両2Aの車載コンピュータ31は、システム情報が異常である或いは正常終了ではなく車両情報を送信しなくなった近隣の他車両2Bの有無を検出し、これを検出した場合に搭乗者に報知する。
このため、他車両2Bが自車両2Aの前方(斜め前方を含む。)にある場合は、自車両2Aの前方に陥没等の道路障害が存在する可能性があることを報知でき、道路障害に伴う二次災害の低減に貢献できる。
【0104】
〔第2の実施形態〕
上記第1の実施形態では、自車両2Aの車載通信機39が、他車両2Bの車載通信機39との間で「車車間通信」を行うことによって、自車両2Aの車載コンピュータ31が他車両2Bの異常事象の有無を判定し、かつ搭乗者に報知する異常予告処理を実行することについて説明した。
これに対して、本実施形態においては、道路を走行している車両2の車載通信機39と、交差点等に設置された路側通信機1との間で「路車間通信」を行うことによって、路側通信機1に通信可能に接続された交通管制センターの中央装置50(図2参照)において、車両2の異常事象の有無を判定し、その情報を種々の用途に活用する。なお、中央装置50は、車両2の異常事象の有無を判定する制御部51のほか、表示部、通信部、記憶部、操作部等を備えたワークステーションやパーソナルコンピュータ等からなる。そして、中央装置50の制御部51は、路側通信機1から受信した各種の情報、例えば、車両のプローブ情報や、道路に設置された車両感知器等の情報等を収集して処理し、各種の情報提供や信号制御等を統括的に行うことができる。
【0105】
異常事象の情報は、所定の対象に出力される。例えば、異常事象の情報は、交通管制センターにおける交通管理者や道路管理者に対する報知(情報提供)され、交通信号灯器の制御、道路管理などに利用することができる。また、異常事象の情報は、中央装置50から路側通信機1を介して道路を走行している車両2の車載通信機39に送信され、当該車両2における出力装置(ディスプレイ36,スピーカー37等)を介して搭乗者に報知することができる。この場合、第1の実施形態と同様に、障害事象の原因となりうる車両(他車両2B)に生じた異常事象を、障害事象の被害を受け得る車両(自車両2A)の搭乗者に報知することによって、他車両2Bとの関係で発生しうる事故の危険性を、自車両2Aの搭乗者に正確に報知することができる。
【0106】
本実施形態において、各車両2の車載コンピュータは、第1の実施形態と同様に、次のa)〜h)のデータを含む車両情報(プローブ情報)を生成し、車載通信機39に所定時間ごとに送信させる。したがって、路車間通信の通信範囲にある路側通信機1は、車両2から送信されたa)〜h)のデータを含む車両情報を受信する。車両情報を送信する時間間隔は、例えば1秒間隔とすることができる。また、各データの具体的な内容は、第1の実施形態と同様であるため、詳細な説明は省略する。
a)現在時刻、b)車両ID、c)車両種別、d)瞬間速度、e)絶対位置、f)進行方向、g)タイヤ方向(蛇角方向)、h)システム状態。
【0107】
上記のa)〜h)の各データは、現在時刻に、当該現在時刻におけるリアルタイムの車両情報(単一情報)として送信される。
或いは、a)〜h)の各データは、現在時刻に、複数周期分の車両情報を纏めた複数情報(例えば、現時刻の、1周期前(1秒前)、2周期前(2秒前)……5周期前(5秒前)など)として送信することもできる。車両情報の送信間隔は、単一情報であれ複数情報であれ、1秒ごとに個々の車両2から送信される。
【0108】
路側通信機1は、車両2の車載通信機から送信された車両情報を受信し、さらにその情報を交通管制センターの中央装置50に有線(又は無線)によりでリアルタイムに送信する。
中央装置50は、リンク(VICSリンクやDRMリンク等)に基づいた道路ネットワークを管理しており、受信した「車両情報」を道路ネットワーク上に展開し、各車両2の動きを追跡し解析する。そして、中央装置50は、各車両2の車両情報から、「異常速度低下」、「異常進行方向変化」、及び「車両の渋滞状態」の3つの異常事象について判定を行う。
【0109】
異常速度低下及び異常進行方向変化を判定(監視)する理由については、第1の実施形態と同様である。すなわち、車両2の異常な速度低下は、障害物による急制動や事故を誘発しかねない制動と考えられるからであり、車両2の異常な方向変化は、障害物の回避行動として急ハンドルを切ったと推定でき、後続車の事故を誘発し易いからである。また、車両の渋滞状態を判定する理由は、渋滞が生じる原因として、自然渋滞だけでなく事故や障害物の存在が考えられ、渋滞が生じている区間に新たに車両2が進入すると、二次的な事故等が誘発される可能性があるからである。また、車両の渋滞状態を検出することで、その情報を中央装置50が行う中央感応制御等の信号制御、交通情報(渋滞情報等)の作成や提供、道路管理のために有効に活用することができる。以下、第1の実施形態と一部重複する説明もあるが、各異常事象についての判定方法とその効果について説明する。
【0110】
〔異常速度低下〕
(判定方法)
中央装置50は、所定時間ごとの車両2の車両速度の変化に基づいて、車両2についての異常速度低下を判定する。
一例として、車両2の、現在、1周期前、2周期前、及び3周期前の4つの時点の車両速度を用いる場合の条件を以下に示す。
中央装置50は、次の条件を満たす場合に、当該車両2に異常速度低下の異常事象が発生したと判定する。
【0111】
条件g1:絶対減速度比較
車両の1周期前速度−車両の現在速度>A7
車両の2周期前速度−車両の1周期前速度>A7
車両の3周期前速度−車両の2周期前速度>A7
【0112】
条件g2:
特定範囲C7において条件g1を満たした車両数>D7
【0113】
ここで、上記の設定値A7は、人手による設定でもよいし、車両の速度、制限速度(指定最高速度又は法定最高速度)等に応じて動的に変化させてもよい。例えば、車両の車両速度が比較的大きい場合は、A7を小さくし、小さい場合は、A7を大きくすることにより、設定値A7を変化させるようにすればよい。また、設定値C7,D7についても、時刻、道路種別、現時点における単位時間交通量等に応じて動的に変化させてもよい。
【0114】
(異常速度低下を判定する場合の効果)
中央装置50は、特定の範囲において所定数を超える車両2が異常な速度低下をしているか否かを判定し、これを検出した場合に交通管理者や道路管理者に報知し、また、路側通信機1を介して当該車両(他車両2B)の近隣を走行する車両(自車両2A)や当該範囲に進入する可能性のある車両(自車両2A)の搭乗者等に報知する。そのため、中央装置50は、その範囲に交通障害となる事象(事故、落下物、渋滞等)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0115】
〔異常方向変化〕
(判定方法)
中央装置50は、所定時間(ここでは1.0秒)ごとの車両2の進行方向の変化に基づいて、車両2についての異常方向変化を判定する。
一例として、車両2の、現在、1周期前、2周期前、及び3周期前の4つの時点の進行方向を用いる場合の条件を以下に示す。
【0116】
中央装置50は、次の条件h1及びh2、条件h3及びh4の双方を満たす場合に、異常進行方向変化の異常事象が発生したと判定する。なお、「進行方向」は、車両2の絶対方向又は緯度経度のいずれか求めることにしてもよい。また、下記条件において、||は絶対値を表す。
【0117】
条件h1:絶対方向比較
|車両2の1周期前進行方向−車両2の現在進行方向|>A8
|車両2の2周期前進行方向−車両2の1周期前進行方向|>A8
|車両2の3周期前進行方向−車両2の2周期前進行方向|>A8
【0118】
条件h2:
特定範囲C8で条件h1を満たしている車両数>D8
【0119】
条件h3:相対方向比較
|車両2の1周期前のタイヤ方向−車両2の現在のタイヤ方向|>B8
|車両2の2周期前のタイヤ方向−車両2Bの1周期前のタイヤ方向|>B8
|車両2の3周期前のタイヤ方向−車両2Bの2周期前のタイヤ方向|>B8
【0120】
条件h4:
特定範囲C8で条件h3を満たしている車両数>D8
【0121】
ここで、上記設定値A8,B8,C8,D8の設定も、人手による設定でもよいが、車両2の車両速度等に応じて動的に変化させてもよい。例えば、車両2の車両速度が比較的大きい場合はA8、B8を小さくし、小さい場合はA8、B8を大きくすることにより、設定値A8、B8を変化させるようにすればよい。また、車両2の車両速度が比較的大きい場合や高速道路ではC8を大きくし、小さい場合や一般道路ではC8を小さくすることにより、C8を変化させるようにすればよい。
【0122】
(異常方向変化を判定する場合の効果)
中央装置50は、特定の範囲において所定数を超える車両2が異常な大きさで進行方向を変化させているか否かを判定し、これを検出した場合に交通管理者や道路管理者に報知し、また、路側通信機1を介して当該車両(他車両2B)の近隣の車両(自車両2A)や当該範囲に進入する可能性のある車両(自車両2A)の搭乗者等に報知する。そのため、中央装置50は、その範囲に交通障害となる事象(事故、落下物、渋滞等)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0123】
〔渋滞状態〕
(判定方法)
中央装置50は、所定時間(ここでは1.0秒)ごとの車両2の位置と速度、及び信号灯器が有る場合には通行権の有無に基づいて、道路の渋滞の有無を判定する。
すなわち、中央装置50は、次の条件j1及びj2を満たす場合に、ある区間において各車両2が渋滞状態にあると判定する。
【0124】
条件j1:
リンクの任意の位置に存在する各車両2の速度<A9
条件j2:
車両2が存在するリンクの下流側に位置する信号灯器が通行可能な現示であること
【0125】
このように、現在の時点における車両の速度と信号灯器の現示とから、その車両2が渋滞状態にあるか否かをリアルタイムに判定する。
さらに、現実の道路の渋滞区間においては、条件j1,j2を満たすことで渋滞状態にある車両2と、設定値A9以上の車両速度ではあるがトロトロと走行している車両2とが混在している場合があるため、以下の条件j3及びj4を満たす区間を渋滞区間と判定する。
条件j3:
同一リンク又は互いに接続されるリンクにおいて条件1を満たす複数の車両2が連続していること
条件j4:
同一リンク又は互いに接続されるリンクにおいて条件1を満たさない連続車両数<B9
【0126】
また、条件j3及びj4によって複数の渋滞区間が求められた場合、隣接する渋滞区間を一つの渋滞区間として接続するか、別々の渋滞区間として扱うかの判定を行ってもよい。この判定は、次の条件j5及びj6を満たすか否かによって行うことができる。すなわち、条件j5及びj6を満たす場合に、隣接する渋滞区間を一つの渋滞区間として接続する。なお、以下の条件に含まれる渋滞区間1及び渋滞区間2は、図7に示されるように車両進行方向に互いに隣接する渋滞区間である。
条件j5:接続区間の距離
|下流側の渋滞区間1の最後尾位置−上流側の渋滞区間2の最前列位置|<C9
条件j6:
接続区間における車線当たりの車両台数N<D9
【0127】
設定値C9の値は、好ましくは300m〜500mに設定されるが、これに限られるものではなく、時刻、道路種別、交通量等に応じて適宜変更することができる。
また、設定値D9は、上流側の渋滞区間2の最下流に位置する交差点の処理台数(当該交差点の青時間に停止線を通過しうる車線当たりの最大の車両数)である。例えば、車線当たりの飽和交通流率が、0.5台/秒であり、交差点の青時間が60秒である場合には、処理台数D9は、0.5×60=30(台)となる。そして、接続区間における車両台数Nが、処理台数D9よりも多い場合(N>D9)、当該交差点を青で通過した車両が全て接続区間内に収容できると考えられるので、渋滞区間1と渋滞区間2とを接続しない。接続区間における車両台数Nが、処理台数D9よりも少ない場合(N<D9)は、当該交差点を青で通過した全ての車両が接続区間内に収納しきれないと考えられるので、渋滞区間1と渋滞区間2とを接続し、一つの渋滞区間として取り扱う。
【0128】
(渋滞状態を検出することによる効果)
中央装置50は、同一リンク又は相互に接続されるリンクを走行する車両2が渋滞状態にあるか否かを判定し、これを検出した場合にリンク内の渋滞区間を求め、交通管理者や道路管理者に報知し、また、路側通信機1を介して当該リンクにおける渋滞区間に進入する可能性のある車両2の搭乗者等に報知する。そのため、中央装置50は、渋滞区間の周辺に交通障害となる事象(事故、落下物)が存在する可能性があることを報知でき、交通事故の低減等に貢献できる。
【0129】
中央装置50から路側通信機1を介して車両2に送信された各異常事象についての情報は、車両2の車載通信機39によって受信される。各車両2の車載コンピュータ31は、車載通信機39によって受信された情報が、自身が監視の対象とする他車両(監視対象車両)についての情報であるか否かを判断する。受信した情報が監視対象車両についての情報である場合には、その情報を搭乗者に報知し、監視対象車両以外についての情報である場合には、その情報を破棄すればよい。異常事象が発生した車両2(他車両2B)が、当該異常事象による被害を受け得る車両2(自車両2A)の監視対象車両であるか否かは、上記第1の実施形態において図5を参照して説明した条件1〜6を満たすか否かによって判断することができる。
【0130】
〔その他の変形例〕
今回開示した各実施形態はすべての点で例示であって制限的なものではない。本発明の権利範囲は、上述の実施形態ではなく、特許請求の範囲と均等の範囲内でのすべての変更が含まれる。
【0131】
例えば、上述の第1の実施形態では、他車両2Bについての異常事象の判定処理を自車両2Aの車載コンピュータ31が行っているが、その異常事象の判定処理を他車両2Bの車載コンピュータ31が行い、その判定結果を自車両2Aに無線送信することにしてもよい。
もっとも、上述の6種類の異常事象のうち、「異常事態発生」については他車両2Bが自身で判定できないので、自車両2Aの車載コンピュータ31が判定する必要がある。
【0132】
また、上述の第2の実施形態では、車両2の異常事象の判定処理を中央装置50が行っているが、路側通信機1の制御部が行い、その結果を中央装置50や車両2に有線又は無線で送信することにしてもよい。また、第2の実施形態においても、異常速度上昇や異常事態発生を判定対象(監視対象)に加えてもよい。また、中央装置50等が判定した異常事象有りの情報は、交通管制センターにおける信号管理者や道路管理者に報知するに限らず、路上に設置された交通信号制御機、情報提供装置、又はその他の通信手段等に出力することによって信号制御や情報提供のために活用してもよい。
【符号の説明】
【0133】
1 路側通信機
2 車両
2A 自車両
2B 他車両
3 車載装置
31 車載コンピュータ(判定手段)
36 ディスプレイ(報知手段)
37 スピーカー(報知手段)
39 車載通信機(車車間通信手段)
50 中央装置(判定処理装置;判定手段、出力(報知)手段)
【特許請求の範囲】
【請求項1】
他車両に生じた異常事象を自車両の搭乗者に報知する交通システムであって、
前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定する判定手段と、
前記判定手段の判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知する報知手段と、
を備えていることを特徴とする交通システム。
【請求項2】
前記他車両の車両情報又は前記異常事象ありの情報を、前記他車両から前記自車両に送信する車車間通信手段をさらに備えていることを特徴とする請求項1記載の交通システム。
【請求項3】
前記異常事象には、前記自車両から見て前記他車両の速度が異常に高速である異常高速走行が含まれており、
前記判定手段は、前記他車両の速度から前記自車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも大きい場合に、前記異常高速走行があったと判定する請求項1又は2に記載の交通システム。
【請求項4】
前記異常事象には、前記自車両から見て前記他車両の速度が異常に低速である異常低速走行が含まれており、
前記判定手段は、前記自車両の速度から前記他車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも小さい場合に、前記異常低速走行があったと判定する請求項1〜3のいずれか1項に記載の交通システム。
【請求項5】
前記異常事象には、前記他車両が異常に大きい加速度で急加速する異常速度上昇が含まれており、
前記判定手段は、前記他車両の絶対加速度が所定値よりも大きく、前記他車両の絶対加速度から前記自車両の絶対加速度を引いた相対加速度が所定値よりも大きい場合に、前記異常速度上昇があったと判定する請求項1〜4のいずれか1項に記載の交通システム。
【請求項6】
前記異常事象には、前記他車両が異常に大きい減速度で急減速する異常速度低下が含まれており、
前記判定手段は、前記他車両の絶対減速度が所定値よりも大きい場合に、前記異常速度低下があったと判定する請求項1〜5のいずれか1項に記載の交通システム。
【請求項7】
前記異常事象には、前記他車両が異常に大きい速度で進行方向を変化させる異常方向変化が含まれており、
前記判定手段は、前記他車両の進行方向変化速度の絶対値が所定値よりも大きく、前記他車両のタイヤ方向変化速度の絶対値が所定値よりも大きい場合に、前記異常方向変化があったと判定する請求項1〜6のいずれか1項に記載の交通システム。
【請求項8】
前記異常事象には、前記他車両についての異常事態発生が含まれており、
前記判定手段は、前記自車両の監視エリア内にある前記他車両のシステム情報が異常である場合に、前記異常事態発生があったと判定する請求項1〜7のいずれか1項に記載の交通システム。
【請求項9】
前記異常事象には、前記他車両についての異常事態発生が含まれており、
前記判定手段は、前記自車両の監視エリア内にある前記他車両から正常終了を受信せずに、車両情報を受信できなくなった場合に、前記異常事態発生があったと判定する請求項1〜8のいずれか1項に記載の交通システム。
【請求項10】
他車両に生じた異常事象を自車両の搭乗者に報知する処理を、車載コンピュータに実行させるためのコンピュータプログラムであって、
前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定するステップと、
その判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知するステップと、
を含むこと特徴とするコンピュータプログラム。
【請求項11】
道路を走行する車両から送信された車両情報を受信する受信部と、
受信した車両情報に基づいて、当該車両に関する異常事象の有無を判定する判定手段と、
前記判定手段の結果が異常事象ありの場合、当該車両に異常事象が発生したことを所定の対象に対して出力する出力手段と、を備えていることを特徴とする異常事象の判定処理装置。
【請求項12】
前記異常事象には、前記車両が渋滞状態にあることが含まれており、
前記判定手段は、前記車両が異常に低速で走行し、かつ走行方向下流側の信号が通行可能な現示である場合に、前記渋滞状態にあると判定する請求項11に記載の異常事象の判定処理装置。
【請求項1】
他車両に生じた異常事象を自車両の搭乗者に報知する交通システムであって、
前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定する判定手段と、
前記判定手段の判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知する報知手段と、
を備えていることを特徴とする交通システム。
【請求項2】
前記他車両の車両情報又は前記異常事象ありの情報を、前記他車両から前記自車両に送信する車車間通信手段をさらに備えていることを特徴とする請求項1記載の交通システム。
【請求項3】
前記異常事象には、前記自車両から見て前記他車両の速度が異常に高速である異常高速走行が含まれており、
前記判定手段は、前記他車両の速度から前記自車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも大きい場合に、前記異常高速走行があったと判定する請求項1又は2に記載の交通システム。
【請求項4】
前記異常事象には、前記自車両から見て前記他車両の速度が異常に低速である異常低速走行が含まれており、
前記判定手段は、前記自車両の速度から前記他車両の速度を引いた減算値が所定値よりも大きく、前記他車両の速度から制限速度を引いた減算値が所定値よりも小さい場合に、前記異常低速走行があったと判定する請求項1〜3のいずれか1項に記載の交通システム。
【請求項5】
前記異常事象には、前記他車両が異常に大きい加速度で急加速する異常速度上昇が含まれており、
前記判定手段は、前記他車両の絶対加速度が所定値よりも大きく、前記他車両の絶対加速度から前記自車両の絶対加速度を引いた相対加速度が所定値よりも大きい場合に、前記異常速度上昇があったと判定する請求項1〜4のいずれか1項に記載の交通システム。
【請求項6】
前記異常事象には、前記他車両が異常に大きい減速度で急減速する異常速度低下が含まれており、
前記判定手段は、前記他車両の絶対減速度が所定値よりも大きい場合に、前記異常速度低下があったと判定する請求項1〜5のいずれか1項に記載の交通システム。
【請求項7】
前記異常事象には、前記他車両が異常に大きい速度で進行方向を変化させる異常方向変化が含まれており、
前記判定手段は、前記他車両の進行方向変化速度の絶対値が所定値よりも大きく、前記他車両のタイヤ方向変化速度の絶対値が所定値よりも大きい場合に、前記異常方向変化があったと判定する請求項1〜6のいずれか1項に記載の交通システム。
【請求項8】
前記異常事象には、前記他車両についての異常事態発生が含まれており、
前記判定手段は、前記自車両の監視エリア内にある前記他車両のシステム情報が異常である場合に、前記異常事態発生があったと判定する請求項1〜7のいずれか1項に記載の交通システム。
【請求項9】
前記異常事象には、前記他車両についての異常事態発生が含まれており、
前記判定手段は、前記自車両の監視エリア内にある前記他車両から正常終了を受信せずに、車両情報を受信できなくなった場合に、前記異常事態発生があったと判定する請求項1〜8のいずれか1項に記載の交通システム。
【請求項10】
他車両に生じた異常事象を自車両の搭乗者に報知する処理を、車載コンピュータに実行させるためのコンピュータプログラムであって、
前記他車両の車両情報に基づいて、前記他車両に関する前記異常事象の有無を判定するステップと、
その判定結果が前記異常事象ありの場合に、前記他車両に前記異常事象が発生したことを前記自車両の搭乗者に報知するステップと、
を含むこと特徴とするコンピュータプログラム。
【請求項11】
道路を走行する車両から送信された車両情報を受信する受信部と、
受信した車両情報に基づいて、当該車両に関する異常事象の有無を判定する判定手段と、
前記判定手段の結果が異常事象ありの場合、当該車両に異常事象が発生したことを所定の対象に対して出力する出力手段と、を備えていることを特徴とする異常事象の判定処理装置。
【請求項12】
前記異常事象には、前記車両が渋滞状態にあることが含まれており、
前記判定手段は、前記車両が異常に低速で走行し、かつ走行方向下流側の信号が通行可能な現示である場合に、前記渋滞状態にあると判定する請求項11に記載の異常事象の判定処理装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−109746(P2013−109746A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−67968(P2012−67968)
【出願日】平成24年3月23日(2012.3.23)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成24年3月23日(2012.3.23)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]