
交通ハザードマップ生成装置
【解決手段】交通ハザードマップ生成装置は、第1群運転者および第2群運転者の個々の頭部動きデータおよび位置データを運転データして記憶し、頭部動きデータを積分して時系列データを得る(S117)。時系列の頭部動きデータに基づいて、それぞれの運転者が首振り確認動作を実行した場所のデータを確認場所データとして記憶する(S119)。ステップS123で第1群運転者が共通して首振り確認動作をした場所の第1群運転者確認場所データを抽出し、ステップS125で第2群運転者が共通して首振り確認動作をした場所の第2群運転者確認場所データを抽出する。そして、第1群運転者確認場所データおよび第2群運転者確認場所データを比較して顕在的危険箇所および潜在的危険箇所を特定する。
【効果】顕在的危険箇所だけでなく潜在的危険箇所も特定されるので、危険認知が不十分な一般運転者にも有効な交通ハザードマップを生成することができる。
【効果】顕在的危険箇所だけでなく潜在的危険箇所も特定されるので、危険認知が不十分な一般運転者にも有効な交通ハザードマップを生成することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は交通ハザードマップ生成装置に関し、特に、自動車の運転者にとって真に危険な危険箇所を示す交通ハザードマップを生成する、新規な交通ハザードマップ生成装置に関する。
【背景技術】
【0002】
この種のものとして、交通安全地図(非特許文献1)がある。交通安全マップは過去の交通事故データをもとにして作成されている。
【非特許文献1】http://www.kotsu-anzen.jp/
【発明の開示】
【発明が解決しようとする課題】
【0003】
非特許文献1の地図の粒度は粗い(たとえば、京田辺市では1箇所のみ表示)ため、自動車運転者に対するものとしては不十分である。
【0004】
それゆえに、この発明の主たる目的は、新規な、交通ハザードマップ生成装置を提供することである。
【0005】
この発明の他の目的は、自動車運転者に有効な交通ハザードマップを生成することができる、交通ハザードマップ生成装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0007】
第1の発明は、複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段を備える、交通ハザードマップ生成装置である。
【0008】
第1の発明では、交通ハザードマップ生成装置(100:実施例において相当する要素を例示する参照符号。以下、同じ。)は、実施例では、運転行動自動評価システム(10)に含まれる頭部動き検出手段(12,14)および位置検出手段(12,20)を利用する。動き検出手段は、運転者の頭部の動きデータを検出するためのものであり、たとえば頭部に装着された角速度センサを含む。位置検出手段は、自動車の位置データを検出するためのものであり、たとえばGPS受信機を含む。運転データ記憶手段(102)は、頭部の動きデータおよび自動車の位置データを含む運転データを記憶する。危険箇所特定手段(102,S119‐S127)は、第1群に属する複数の運転者の運転データに基づいて、たとえば第1群運転者が共通して首振り確認動作を行なった場所を危険箇所として特定する。
【0009】
明らかに見通しが悪い場所、明らかに危険そうな場所では、危険認知があまりできない運転者であっても、事故を未然に防ぐための予防動作(減速、左右確認)をする。つまり、見るからに危険だと判断できる箇所では、多くの運転者が予防動作を自発的にとるため、潜在的な危険度は、実はそれほど高くないとも考えられる。少なくとも、このような場所では、各運転者はほぼ全員が予防動作を実行するので、運転者毎の技能差はでにくい。他方、一見なんでもないように見えて、実は見通しが悪い交差点(たとえば、十字交差点において、一方は見通しがよいが、もう一方にブロック塀などの遮蔽物があって見通しが悪くなっている箇所、など)などでは、危険認知ができる運転者であれば予防動作を実行するものの、危険認知があまりできない運転者は、警戒を忘れ、速度も落とさずに進入してしまうことがある。このような交差点こそ、潜在的に危険であり、また、各運転者の技能差が出やすい場所と考えられる。そこで、危険認知が十分できる第1群運転者が全員たとえば首振り確認動作のような予防動作を実行した場所を真に危険な危険箇所として特定する。
【0010】
第1の発明によれば、第1群運転者の運転データに基づいて危険箇所を特定するので、運転者にとって真に危険な危険箇所を示す交通ハザードマップが生成できる。
【0011】
第2の発明は、第1の発明に従属し、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段をさらに備え、危険箇所特定手段は、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段を含み、第1群運転者確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0012】
第2の発明では、確認場所特定手段(102,S119)は、運転データに含まれる頭部動きデータおよび位置データに基づいて、運転者が所定以上の首振り角度で首振り確認動作を実行した場所(確認場所)を特定する。確認場所を示す確認場所データは、適宜の記憶手段に記憶される。そして、危険箇所特定手段に含まれる第1抽出手段(102,S123)は、適宜の記憶手段に記憶している確認場所データを参照して、第1群運転者の全員が首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する。この第1群運転者確認場所データが示す場所を危険箇所として特定する。複数の第1群運転者が共通して首振り確認動作をした場所を抽出するようにすれば、周囲の交通状況に起因する動き、たとえば、対向車がきたのでそちらを見たときなどの首振り確認動作をした場所を排除し、地形的要因による首振り確認動作をした場所のみを抽出できる。つまり、たまたま1人の第1群運転者が交通状況の関係で首振り確認動作をしただけであると、多人数の第1群運転者の首振り確認動作の生起場所を比較すれば、このような「たまたま」の首振り確認動作を除外できる。したがって、第2の発明によれば、危険認知が十分できる第1群運転者が全員首振り確認動作を実行した場所を危険箇所として特定するので、特定された危険箇所は十分信頼することができる。
【0013】
第3の発明は、第2の発明に従属し、危険箇所特定手段は、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段をさらに含み、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0014】
第3の発明では、危険箇所特定手段に含まれる第2抽出手段(102,S125)は、適宜の記憶手段に記憶している確認場所データを参照して、第2群運転者の全員が首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する。そして、危険箇所特定手段(102,S127)は、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者確認場所データが示す場所を危険箇所として特定する。第2群運転者は第1群運転者に比べて危険認知が十分できない運転手であるとする。このような第2群運転者が全員首振り確認動作をするということは、その場所は明らかな危険箇所(顕在的な危険箇所)である。他方、危険認知が十分できる第1群運転者が全員首振り確認した場所は、顕在的な危険箇所だけでなく、一見何でもないが実は危険な潜在的な危険箇所も含むと推定できる。したがって、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、少なくとも第1群運転者が首振り確認を実行した場所を潜在的な危険箇所として特定するようにしている。第3の発明によれば、一見何でもないように見えて実は危険な場所である、真に危険な場所を危険箇所として特定することができる。
【0015】
第4の発明は、第3の発明に従属し、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0016】
第4の発明では、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する。上述のように、第1群運転者および第2群運転者が全員共通して首振り確認動作を行う場所は明らかな危険箇所であるので、第4の発明によれば、第3の発明で特定した潜在的な危険箇所に加えて、顕在的な危険箇所も特定することができる。
【0017】
第5の発明は、複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転データを記憶する運転データ記憶手段、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段を備える、交通ハザードマップ生成装置である。
【0018】
第5の発明では、交通ハザードマップ生成装置(100)は、一例として、運転行動自動評価システム(10)に含まれる頭部動き検出手段(12,14)および位置検出手段(12,20)を利用する。動き検出手段は、たとえば頭部に装着された角速度センサを含み、運転者の頭部の動きデータを検出する。位置検出手段は、たとえばGPS受信機を含み、自動車の位置データを検出する。運転データ記憶手段(102)は、頭部の動きデータおよび自動車の位置データを含む運転データを記憶する。危険箇所特定手段(102,S119‐S127)は、第1群に属する複数の運転者の運転データに基づいて、たとえば第1群運転者が共通して首振り確認動作を行なった場所を危険箇所として特定する。
【0019】
詳しくいうと、確認場所特定手段(102,S119)は、運転データに含まれる頭部動きデータおよび位置データに基づいて、運転者が所定以上の首振り角度で首振り確認動作を実行した場所(確認場所)を特定する。確認場所を示す確認場所データは、適宜の記憶手段に記憶される。第1抽出手段(102,S123)は、記憶手段に記憶している確認場所データを参照して、第1群運転者の全員が首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する。第2抽出手段(102,S125)は、適宜の記憶手段に記憶している確認場所データを参照して、第2群運転者の全員が首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する。そして、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者確認場所データが示す場所を危険箇所として特定する。
【0020】
第5の発明によれば、顕在的な危険箇所だけでなく潜在的な危険箇所も特定できるので、運転者にとって極めて有効な交通ハザードマップが生成できる。
【0021】
つまり、第2群運転者が全員首振り確認動作をするということは、その場所は明らかな危険箇所(顕在的な危険箇所)である。他方、危険認知が十分できる第1群運転者が全員首振り確認した場所は、顕在的な危険箇所だけでなく、一見何でもないが実は危険な潜在的な危険箇所も含むと推定できる。このような潜在的危険箇所では第2群運転者は注意を怠り、速度も落とさずに進入してしまうことがある。つまり、潜在的危険箇所では第2群運転者は首振り確認動作をしないことが容易に推測できる。したがって、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者が首振り確認を実行した場所を潜在的な危険箇所として特定するようにしたのである。
【0022】
第6の発明は、第5の発明に従属し、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0023】
第6の発明では、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する。つまり、第1群運転者および第2群運転者が全員共通して首振り確認動作を行う場所は明らかな危険箇所であるので、第6の発明によれば、第5の発明で特定した潜在的な危険箇所に加えて、顕在的な危険箇所も特定することができる。
【0024】
第7の発明は、第1ないし第6の発明に従属し、所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶する動作定義データ記憶手段、および動きデータ、位置データおよび動作定義データに基づいて、事故予防動作が正しくなされたか否かを評価して評価点を算出する評価手段をさらに備え、評価点が閾値を超えた運転者を第1群運転者とし、それ以外の運転者を第2群運転者とする、交通ハザードマップ生成装置である。
【0025】
第7の発明では、動作定義データ記憶手段(22)は、所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶している。所定箇所としては典型的には三叉路以上の交差点が評価対象箇所として採用されてよい。評価手段(22、S27、S33、S39、S45、S51、S57)は、頭部動きデータ、位置データおよび動作定義データに基づいて、事故予防動作が正しくなされたか否かを評価する。事故予防動作は、少なくとも左右確認動作に関する評価項目および車速に関する評価項目を用いて定義されており、したがって、評価項目が満足されたかどうかを判断することによって、運転者の事故予防動作が評価され、その結果が評価点として採点(算出)される。危険箇所特定手段(S127)は、運転データ記憶手段に記憶されている、評価手段によって算出した評価点が閾値を超えた運転者を第1群運転者と認定し、それ以外の運転者を第2群運転者として区分する。
【0026】
第7の発明によれば、第1群運転者および第2群運転者を客観的に区分することができるので、得られた交通ハザードマップの信頼性が担保できる。
【0027】
第8の発明は、第1ないし第7の発明に従属し、頭部動きデータ検出手段は、運転者の頭部に装着され、左右への首振り角度を検出する首振り角度センサを含む、交通ハザードマップ生成装置である。
【0028】
第8の発明では、首振り角度センサによって頭部の首振り角度を直接検出することができるので、たとえば画像処理によって頭部の首振り角度を計算する場合に比べて、複雑な処理や計算が不要であり、簡単であるとともに高速に処理できるので、危険箇所を確実に特定または検出することができる。
【0029】
第9の発明は、複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、コンピュータを、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段として機能させる、交通ハザードマップ生成プログラムである。
【0030】
第9の発明によれば、第1の発明と同じ効果が期待できる。
【0031】
第10の発明は、複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、コンピュータを、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転データを記憶する運転データ記憶手段、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定し、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段して機能させる、交通ハザードマップ生成プログラムである。
【0032】
第10の発明によれば、第5の発明と同様の効果が期待できる。
【発明の効果】
【0033】
この発明によれば、顕在的に危険箇所だけでなく潜在的な危険箇所も特定できるので、危険認知が十分でない運転者にとって有効な交通ハザードマップを生成することができる。
【0034】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0035】
【図1】図1はこの発明の一実施例の交通ハザードマップ生成装置を示すブロック図である。
【図2】図2はこの発明の一実施例の交通ハザードマップ生成装置の一部を形成する運転行動自動評価システムの構成を示すブロック図である。
【図3】図3は運転者の帽子に装着された角速度センサの一例を示す図解図である。
【図4】図4は運転者の右足先に装着された角速度センサの一例を示す図解図である。
【図5】図5は運転者の右足がアクセルペダルからブレーキペダル側に移動された様子を示す図解図である。
【図6】図6は危険箇所情報の一例を示す図解図である。
【図7】図7は運転行動自動評価システムの動作の一例の一部を示すフロー図である。
【図8】図8は図7の続きの一部を示すフロー図である。
【図9】図9は図8の続きの一部を示すフロー図である。
【図10】図10は図8および図9の続きの一部を示すフロー図である。
【図11】図11は図10の続きの一部を示すフロー図である。
【図12】図12は図11の続きを示すフロー図である。
【図13】図13は評価結果表示画面の一例を示す図解図である。
【図14】図14は実施例の交通ハザードマップ生成装置のコンピュータの動作を示すフロー図である。
【図15A】図15Aは実験において複数の第1群運転者画像それぞれ首振り確認動作をした場所を示す地図の左半分を示す図解図である。
【図15B】図15Bは実験において複数の第1群運転者画像それぞれ首振り確認動作をした場所を示す地図の右半分を示す図解図である。
【図16A】図16Aは実験において第1群運転者全員が首振り確認動作をした場所と第1群運転者が手動的に危険箇所であると指摘した場所を示す地図の左半分を示す図解図である。
【図16B】図16Bは実験において第1群運転者全員が首振り確認動作をした場所と第1群運転者が手動的に危険箇所であると指摘した場所を示す地図の右半分を示す図解図である。
【図17A】図17Aは実験において第1群運転者全員が首振り確認動作をした場所と第2群運転者全員が首振り確認動作をした場所を示す地図の左半分を示す図解図である。
【図17B】図17Bは実験において第1群運転者全員が首振り確認動作をした場所と第2群運転者全員が首振り確認動作をした場所を示す地図の右半分を示す図解図である。
【発明を実施するための最良の形態】
【0036】
図1に示すこの発明の一実施例の交通ハザードマップ生成装置100は、図2に示す運転行動自動評価システム(以下、単に「システム」という。)10を含む。したがって、以下の説明では、図2‐図13を参照してまずこのシステム10を詳細に説明し、ついで、交通ハザードマップ生成装置100を説明する。
【0037】
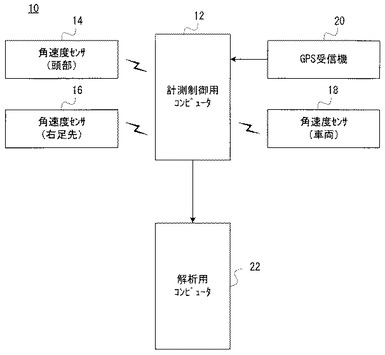
システム10は、危険箇所に対する自動車の運転者の運転行動を評価するためのものであり、計測部(計測装置)と解析部(解析装置)とを含む。具体的には、システム10は、計測部として、計測制御用コンピュータ12、角速度センサ14,16および18、およびGPS受信機20を含み、解析部として解析用コンピュータ22を含む。
【0038】
なお、この実施例では、計測制御用コンピュータ12と解析用コンピュータ22として、別個のコンピュータを使用するようにしているが、1つのコンピュータが両者の機能を備えるようにしてもよい。
【0039】
計測制御用コンピュータ12は、データ計測を行うためのものである。計測制御用コンピュータ12としては、この実施例ではPDA(携帯情報端末)が用いられるが、他の実施例では、パーソナルコンピュータ、自動車の電子制御ユニットのコンピュータ、カーナビゲーションシステムのコンピュータ等であってもよい。
【0040】
計測制御用コンピュータ12は、図示は省略するが、CPU、ROM、RAMおよび通信装置等を備えている。ROMは制御プログラムおよび必要なデータを予め記憶している。RAMはワークメモリおよびバッファメモリとして使用され、生成したデータや取得したデータ等を一時記憶する。通信装置は、この計測制御用コンピュータ12に接続される角速度センサ14、16、18等のような各装置との間でデータを送受信する。
【0041】
この実施例では、運転者の頭部の動きを検出する動き検出手段として、角速度センサ14が適用され、また、運転者の右足先の動きを検出する動き検出手段としても、角速度センサ16が適用される。後述するように、角速度センサ14は運転者の左右の目視確認動作(左右確認動作)の検出のためのものであり、角速度センサ16は運転者のブレーキの構えの検出のためのものであるから、角速度センサ14および角速度センサ16としては、少なくとも1軸の角速度を検出可能なものが使用されればよい。したがって、1軸角速度センサ、2軸角速度センサまたは3軸角速度センサが使用され得る。また、角速度センサ14および角速度センサ16としては同一のものが使用されてよい。角速度センサ14、16は、所定周期(たとえば100Hz)で(一定時間ごとに)所定軸回りの角速度を検出する。また、角速度センサ14、16は通信機能を備えており、検出した角速度データをたとえば一定時間ごとにまたは所定タイミングで計測制御用コンピュータ12に送信する。また、この実施例では、角速度センサ14、16は、たとえばBluetooth(登録商標)のような近距離無線通信によって計測制御用コンピュータ12との間でデータを送受信する。なお、他の実施例では、角速度センサ14、16は有線で計測制御用コンピュータ12に接続されてもよいが、運転者の運転操作を妨げないようにするために無線で接続されるのが望ましい。
【0042】
角速度センサ14は、運転者の目視確認の動作を検出するために、運転者の頭部に装着される。左右への目視確認動作の際には、眼球だけが動くことはなく、一般的には多少なりとも頭部にも動きが生じる。そのため、頭部の動きを計測することで、視線方向の変化を運転者にさほど負荷をかけることなく推測することが可能となる。
【0043】
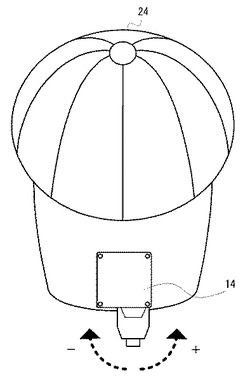
また、頭部への装着を簡単にするために、この実施例では図3に示すように帽子24が使用されており、角速度センサ14は帽子24のたとえば鍔の部分に取り付けられる。図3は帽子24を上から見た場面を示している。この角速度センサ14は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように、帽子24に取り付けられる。この角速度センサ14の取り付けられた帽子24を運転者が被れば、運転者の頭部の左右方向への回転(旋回)に応じた角速度データを計測することができ、つまり、運転者の頭部の回転すなわち目視確認動作を検出・計測することができる。この角速度センサ14の鉛直方向軸回りの角速度の検出方向については、図3で反時計回りが正方向に、時計回りが負方向に設定されている。帽子24を被った運転者が左方向を向けば正の角速度データが検出され、右方向を向けば負の角速度データが検出される。したがって、計測制御用コンピュータ12では、角速度センサ14の角速度データを解析することによって、運転者が左右に顔を向けたか否か、つまり、左右への目視確認動作を行ったか否かを判定することができる。
【0044】
なお、角速度センサ14は、たとえばヘアバンド,ヘアピン,バンダナ,カチューシャなど他の方法で頭部に装着されてよい。さらに、頭部に直接装着する以外に、ピアス,イヤリング,眼鏡,マスク,鼻輪などの手段を用いて頭部に装着するようにしてもよい。
【0045】
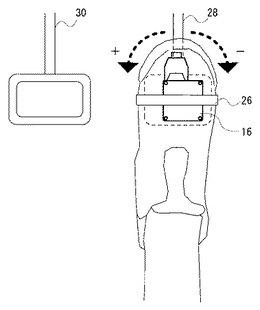
また、角速度センサ16は、運転者のブレーキの構えを検出するために、図4に示すように、運転者の右足先に装着される。ブレーキの構えは、運転者が危険の予測をしているか否か、万一の場合への備えができているか否かを知るための指標になり得ると考えられるので、角速度センサ16を右足先に装着することによって、ブレーキの構えの計測を可能にする。
【0046】
角速度センサ16は、たとえばバンド26を用いて運転者の右足先に取り付けられる。なお、角速度センサ16は他の方法で右足先に装着されてもよく、たとえば運転用靴のつま先の部分に角速度センサ16を内蔵させるようにしてもよい。さらに、アンクレット(足首に装着する足輪),靴下,ネイル(付け爪)などの手段を用いて足に装着することも考えられる。
【0047】
また、図4は、運転者からみた角速度センサ16を示している。角速度センサ16は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように、運転者の右足先に取り付けられる。角速度センサ16の鉛直方向軸回りの角速度の検出方向については、この実施例では、図4で反時計回りが正方向に、時計回りが負方向に設定されている。
【0048】
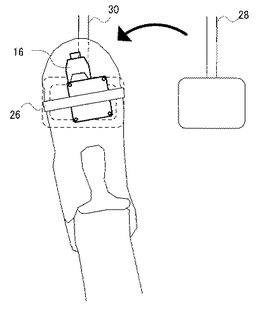
自動車が走行中には、図4に示すように、運転者の右足はアクセルペダル28上に置かれる。ブレーキの構えをしたり、減速をしたりする場合、図5に示すように、運転者の右足はブレーキペダル30側に移動され、その後、速度を維持したり加速をしたりする場合、図4に示すように、右足はアクセルペダル28側に戻される。このアクセルペダル28とブレーキペダル30間の移動には、左右方向への回転を伴うので、角速度センサ16によって、右足の回転を検出することによって、運転者がブレーキの構えをしているか否かを判定することができる。
【0049】
図1に戻って、角速度センサ18は、自動車(車両)の挙動を検出するためのものである。角速度センサ18としては、上述の角速度センサ14および16と同様のものが使用される。この実施例では、角速度センサ18は、粘着テープ等の固定部材を用いてダッシュボード上の所定の位置に装着される。角速度センサ18は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように取り付けられる。したがって、自動車の左右方向への回転(旋回)に応じた角速度データを計測することができ、つまり、自動車の旋回すなわち右左折を検出・計測することができる。この角速度センサ18の鉛直方向軸回りの角速度の検出方向については、角速度センサ14および16と同様に、反時計回りが正方向に、時計回りが負方向に設定される。自動車が左方向に旋回すれば正の角速度データが検出され、右方向に旋回すれば負の角速度データが検出される。したがって、計測制御用コンピュータ12では、角速度センサ18の角速度データを解析することによって、自動車が右折または左折したか否かを判定することができる。
【0050】
GPS受信機20は、自動車の現在の位置を検出するための位置検出装置であり、たとえば自動車の屋根に取り付けられている。GPS受信機は、GPS衛星からの信号を所定周期(たとえば1Hz)で(一定時間ごとに)受信して、現在地の座標(緯度、経度、高度)を算出し、現在位置の座標を含む位置データを計測制御用コンピュータ12に出力する。
【0051】
なお、システム10は、GPS衛星からの信号を受信できない場所での位置推定のために、自動車に搭載された加速度センサ、車速センサ、角速度センサ18等を用いるようにしてもよい。また、GPS受信機20は、自動車に搭載されたカーナビゲーションシステムのGPS受信機を利用してもよい。
【0052】
計測制御用コンピュータ12は、角速度センサ14,16および18から受信した角速度データ、およびGPS受信機20から受信した位置データを、計測データとしてメモリに記録する。なお、角速度データおよび位置データでは、角速度値および座標は、それぞれ検出時刻または取得時刻に対応付けて記憶されている。
【0053】
自動車走行中に記録された計測データは、計測制御用コンピュータ12から解析用コンピュータ22に送信されて解析用コンピュータ22に取り込まれる。なお、計測データは、記憶媒体を介して解析用コンピュータ22に取り込まれてもよい。解析用コンピュータは、計測データを解析して、運転者の運転行動を評価し、評価結果を出力するためのものである。解析用コンピュータ22としては、この実施例では、パーソナルコンピュータが用いられる。解析用コンピュータ22は、図示は省略するが、CPU、ROM、RAM、HDD、通信装置および入力装置等を備え、さらに評価結果を出力するために出力装置(表示装置またはプリンタ等)を備えている。ROMは制御プログラム(解析プログラムを含む)および必要なデータを予め記憶している。RAMはワークメモリおよびバッファメモリとして使用され、生成したデータや取得したデータ等を一時記憶する。通信装置は、計測制御用コンピュータ12との間でデータを送受信する。
【0054】
運転行動を自動的に評価するためには、まず「満点」の基準を定める必要がある。指導員の模範運転を満点とし、そこからの差分で評点をつける方式も考えられるが、その場合、模範運転データが存在しない箇所での評価を行うことができない。そこで、この実施例では、ある地点において最低限なすべき安全確認・確保動作(事故予防動作)を定義し、それらの達成度でもって当該箇所における運転行動を評価する手法を採用する。すなわち、理想運転を満点とするのではなく、危険を事前に回避できる最低限度の運転を満点とする。
【0055】
自動車教習所の指導員に面接調査を行った結果、指導員は以下の点に着目して運転評価を行っているという知見を得た。すなわち、左右確認動作について、(1)確認の方向(左右)、(2)確認の回数、(3)確認の深さ(ミラー確認程度、より深い目視、振り返り確認(巻き込み確認))、(4)確認の持続時間(ちらりと見ただけなのか、じっくり見ているのか)、(5)確認を行うタイミング(危険箇所進入前、進入直前、進入中)。(6)危険箇所における車両速度、そして、(7)右足がどのペダル上にあるべきか(ブレーキの構えがなされているか)である。
【0056】
この知見に基づき、この実施例では危険箇所ごとに、当該箇所で最低限なすべき事故予防動作を上記(1)−(7)の評価項目を用いて各々定義し、その達成度でもって評価を行う。なお、事故予防動作の定義は、指導暦25年の教習所指導員によってなされた。運転行動評価の際には、(1)−(7)の評価項目がすべて満たされたときのみ、事故予防動作が正しくなされたものとみなす。
【0057】
解析用コンピュータ22には、運転者に走行させる所定のコース上に設定された危険箇所に関する情報が予め記憶されている。危険箇所は、典型的には事故多発地点である。所定のコースを公道上に設定する場合、当該公道上の危険箇所がコースに含まれるように運転行動評価のためのコースを設定する。また、運転行動評価のためのコースは、たとえば教習所や施設等に設けられてもよく、その場合、事故多発地点の形状をコース上に再現することによって、危険箇所を設ける。
【0058】
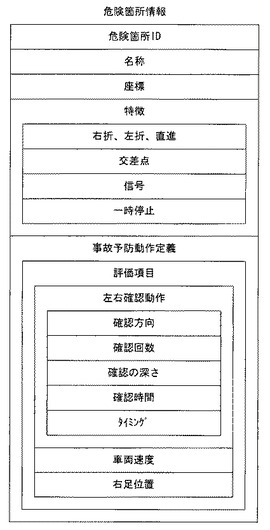
図6に危険箇所情報の一例が示される。危険箇所の識別情報(危険箇所ID)に対応付けて、当該危険箇所に関する種々の情報とともに、当該危険箇所に設定された事故予防動作の定義データが記憶されている。
【0059】
この実施例では、危険箇所の情報は、名称、座標および特徴等を含む。名称は、危険箇所に設定された名称である。たとえば、危険箇所が旧道3から旧道4に左折する交差点である場合、「旧道3→旧道4 左折」といった名称が設定されている。座標は、当該危険箇所の位置を示し、GPS受信機20で検出される自動車の位置データと同様に、緯度、経度および高度で表される。また、危険箇所は、実際には1点ではなく面積または幅をもった領域であるから、当該領域を示す座標データが記憶される。特徴は、当該危険箇所の運転に関わる特徴を示し、たとえば、当該危険箇所の通過の仕方が右折、左折または直進のいずれであるか、当該危険箇所が交差点であるか否か、当該危険箇所に信号が設置されているか否か、当該危険箇所に一時停止が義務付けられているか否か等が記憶されている。
【0060】
また、当該危険箇所に設定された事故予防動作の定義データが記憶されている。危険箇所には、1または複数の事故予防動作が設定される。評価項目として、左右確認動作の(1)確認方向、(2)確認回数、(3)確認の深さ、(4)確認時間、(5)確認のタイミング、(6)車両速度、および(7)右足位置に関する情報が記憶されている。
【0061】
たとえば、事故予防動作として、左折前の左側巻き込み確認動作の場合、(1)確認方向として左、(2)確認回数として1回、(3)確認の深さとして左後方振り返り確認、(4)確認時間として、ちらりと見るだけの動作は不可、(5)確認タイミングとして、左折開始直前、(6)車両速度として、20km/h以下、そして、(7)右足位置として、定義せず、といった定義が行われる。評価を行わない項目には、定義せず(定義無し)を示すデータが設定される。
【0062】
続いて、図7から図12に示すフロー図を参照しながら、このシステム10の具体的な動作の一例を説明する。
【0063】
まず、ステップS1では、計測制御用コンピュータ12によってデータ計測を行う。運転者に角速度センサ14および16を取り付けた状態で、所定のコース上を走行させて、データ計測を行う。頭部の角速度センサ14の角速度データ、右足先の角速度センサ16の角速度データ、および車両の角速度センサ18の角速度データは、たとえば100Hzでサンプリングされ、GPS受信機20の位置データは、たとえば1Hzでサンプリングされて、それぞれのデータが計測制御用コンピュータ12に記録される。
【0064】
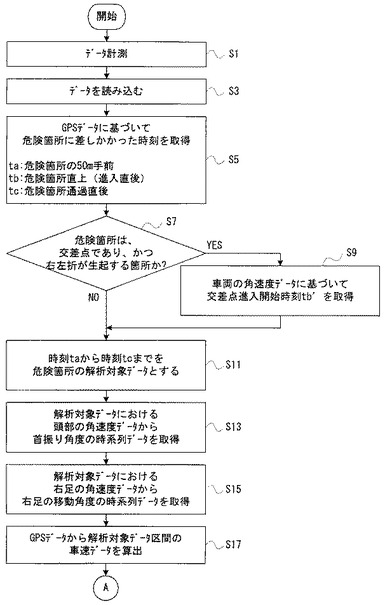
次に、ステップS3で、計測データを解析用コンピュータ22に読み込む。このデータの取り込みは、走行後に計測制御用コンピュータ12から解析用コンピュータ22に計測データを送信することによって行われ、あるいは、計測データをメモリカードのような記憶媒体に記憶し、当該記憶媒体から計測データを解析用コンピュータ22に読み込む。続くステップS5以降の処理は解析用コンピュータ22で実行される。危険箇所ごとにステップS5以降の処理が実行される。
【0065】
ステップS5では、GPSデータに基づいて、自動車が危険箇所に差し掛かった時刻を取得する。具体的には、GPSデータの緯度情報,経度情報と危険箇所の座標データに基づいて、事前に設定した危険箇所に差し掛かった時刻を取得する。この際、この実施例では、危険箇所の50m手前の時刻ta,危険箇所直上(進入直後)の時刻tb,危険箇所通過直後の時刻tcの3つの時刻を取得する。なお、時刻taは、危険箇所における運転行動を評価するための解析対象データの開始位置を決めるためのものであり、この実施例では危険箇所から50m手前を開始位置としているが、この所定距離は適宜変更されてよい。
【0066】
また、ステップS7で、当該危険箇所が交差点であり、かつ、右左折が生起する箇所であるか否かを危険箇所情報に基づいて判断する。ステップS7で、“YES”であれば、ステップS9で、車両の角速度データに基づいて、交差点進入開始時刻tb´を取得する。つまり、車両が右左折を開始した時刻の推定を行う。具体的には、GPSによって取得した危険箇所の50m手前の時刻taから、角速度センサ出力の積分を開始し、積分値が所定の閾値(この実施例では5度)を越えた時刻を交差点進入開始時刻tb´とする。なお、この実施例では、角速度センサ18のサンプリングレートは100Hzであり、GPS受信機20のそれよりも密であるため、GPSデータによって推定した危険箇所直上(進入直後)の時刻tbよりも、角速度センサ出力の積分によって推定した交差点進入開始時刻tb´を優先する。一方、ステップS7で“NO”の場合、処理はそのままステップS11へ進む。
【0067】
ステップS11では、時刻taから時刻tcまでの計測データを当該危険箇所の解析対象データとして設定する。
【0068】
続いて、ステップS13では、解析対象データにおける頭部の角速度データから首振り角度の時系列データを取得する。つまり、頭部の角速度センサ出力を積分し、或る時刻における首振り角度を推定する。ただし、角速度データを単純に積分しただけでは、誤差が蓄積し、実際の値とは大きく異なる推定値となることが知られている。これに対処するため、この実施例では、次の方策を採る。走行中、すなわち自動車の速度が0km/hでないとき、運転者の頭は基本的に正面を向いていると考えられる。そこで、走行中に時間theadの間、ωhead以上の角速度が検出されない場合には首振り角度を0にリセットする。累積誤差のリセットを決定するためのパラメータは、実験的に求められ、この実施例では、時刻theadは3.0sであり、ωheadは30.0deg(度)/sである。
【0069】
また、ステップS15では、解析対象データにおける右足の角速度データから右足の移動角度の時系列データを取得する。つまり、右足先の角速度センサ出力を積分し、或る時刻における右足の位置を推定する。上述の首振り角度の場合と同様に、積分の際の誤差を除去するために、次の方策を採る。ビデオ検証による知見では、走行中、運転者の右足は基本的にアクセルペダル28を踏んでおり、必要に応じてブレーキペダル30上に足を移動させることが多い。そこで、走行中に時間ttoe の間、ωtoe 以上の角速度が検出されない場合には、足の位置をアクセル位置にリセットする。この実施例では、実験的に求めた時刻ttoe は15.0sであり、ωtoe は30.0deg/sである。
【0070】
また、ステップS17では、GPSデータから解析対象データ区間の車速データを算出する。車速は、たとえば1秒間の移動距離から算出される。
【0071】
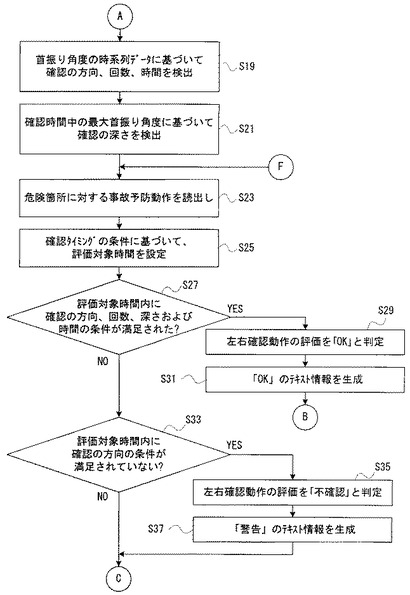
続いて、図8のステップS19で、首振り角度の時系列データに基づいて、左右確認の方向、回数、および時間を検出する。具体的には、首振り角度の時系列データにおいて、絶対値15度以上の角度が生じた場合、左右確認行動が生起したものとみなす。つまり、評価項目(2)の確認回数が+1となる。また、それ以降連続して15度以上の角度が生じている間は、1回の左右確認行動が継続しているものとみなす。この継続時間を、評価項目(5)の確認時間とする。また、図3に示したように、首振り角度の符号が正の場合、評価項目(1)の確認方向は左方向であり、負の場合、評価項目(1)の確認方向は右方向である。
【0072】
さらに、ステップS21で、確認時間中の最大首振り角度を算出し、その大きさに基づいて、評価項目(3)の左右確認の深さを検出する。この実施例では、確認の深さを3段階に分けて評価するようにしている。具体的には、最大首振り角度が15deg以上35deg未満の場合、浅い確認動作と評価し、最大首振り角度が35deg以上55deg未満の場合、普通の確認動作と評価し、最大首振り角度が55deg以上の場合、振り返り確認動作であると評価する。これらの確認動作の分類の閾値は、実験の計測データとビデオ分析によって取得された。
【0073】
続いて、ステップS23で、当該危険箇所に対して設定されている事故予防動作の定義データをROMまたはHDDからメモリ(RAM)に読み出す。危険箇所に対しては、複数の事故予防動作を設定することが可能であり、事故予防動作ごとに、当該動作が正しくなされたかどうかをチェックする。
【0074】
まず、ステップS25で、左右確認動作の確認タイミングの条件に基づいて、評価対象時間を設定する。たとえば、確認タイミングが「左折開始直前」と設定されている場合、交差点進入開始時刻tb´の一定時間前(この実施例では3秒前)から、交差点進入開始時刻tb´までの時間のみを評価対象とする。
【0075】
そして、ステップS27で、評価対象時間内に、確認の方向、回数、深さおよび時間の条件が満足されているか否かを判断する。ステップS27で“YES”の場合、つまり、左右確認動作の(1)から(5)の評価項目が満足された場合には、ステップS29で、左右確認動作の評価を「OK」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS31で、当該左右確認動作について「OK」のテキスト情報をメモリに生成する。このテキスト情報は、評価結果画面において、左右確認動作の評価結果を表示するためのものである。ここでは、左右確認動作が正しく行われたことを表示するためのテキスト情報が生成される。ステップS31を終了すると、つまり、左右確認動作の評価を終了すると、処理は図10のステップS57に進む。
【0076】
一方、ステップS27で“NO”の場合、つまり、評価対象時間内に左右確認動作が正しく達成されていない場合には、さらにその達成度を調べる。つまり、ステップS33で、評価対象時間内に確認方向の条件が満足されていないか否かを判断する。ステップS33で“YES”の場合には、つまり、評価時間内に確認すべき方向の確認動作が全く生じていない場合には、ステップS35で、左右確認動作の評価を「不確認」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS37で、当該左右確認動作について、「警告」のテキスト情報をメモリに生成する。左右確認動作が全く行われていないので、当該事項を警告するためのテキスト情報が生成される。ステップS37を終了し、またはステップS33で“NO”の場合、処理はステップS39に進む。
【0077】
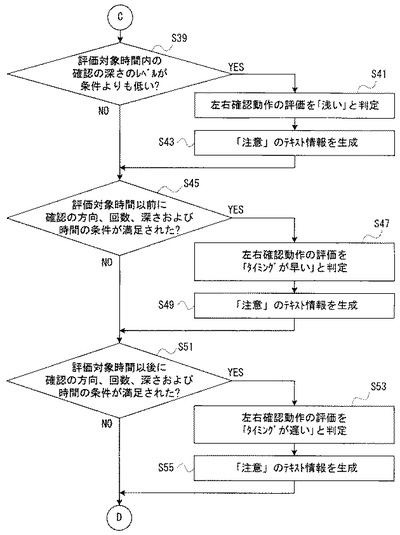
図9のステップS39では、評価対象時間内の確認の深さのレベルが条件よりも低いか否かを判断する。つまり、評価時間内に確認方向の確認動作は生じたものの、最大首振り角度が条件を満足していない場合には、ステップS41で、左右確認動作の評価を「浅い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS43で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりも浅い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS43を終了し、またはステップS39で“NO”の場合、処理はステップS45に進む。
【0078】
ステップS45では、評価対象時間以前に、確認の方向、回数、深さおよび時間の条件が満足されたか否かを判断する。ステップS45で“YES”の場合、つまり、評価対象時間直前の所定時間の間に、左右確認動作が行われたと判断される場合には、ステップS47で、左右確認動作の評価を「タイミングが早い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS49で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりもタイミングの早い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS49を終了し、またはステップS45で“NO”の場合、処理はステップS51に進む。
【0079】
ステップS51では、評価対象時間以後に、確認の方向、回数、深さおよび時間の条件が満足されたか否かを判断する。ステップS51で“YES”の場合、つまり、評価対象時間直後の所定時間の間に、左右確認動作が行われたと判断される場合には、ステップS53で、左右確認動作の評価を「タイミングが遅い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS55で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりもタイミングの遅い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS55を終了し、またはステップS51で“NO”の場合、処理はステップS57に進む。
【0080】
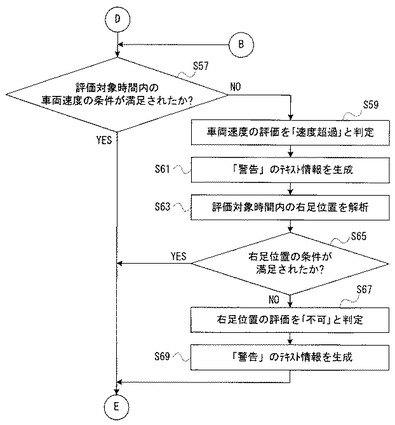
図10のステップS57では、評価対象時間内の車両速度の条件が満足されたか否かを判断する。ステップS57で“NO”の場合、つまり、車速データを参照して、条件を超える車両速度が検出された場合には、ステップS59で、車両速度の評価を「速度超過」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS61で、当該車両速度について、「警告」のテキスト情報をメモリに生成する。車速が安全確認および安全確保のために必要とされる速度を超えているので、当該事項を警告するためのテキスト情報が生成される。
【0081】
なお、危険箇所が一時停止の必要な場所であって、事故予防動作が一時停止である場合には、たとえば車両速度の条件が0km/hに設定され、評価対象時間内に車両速度が0km/hになったか否かが判断される。そして、満足されなかった場合、車両速度の評価が「一時停止不履行」と判定されるとともに、当該一時停止不履行を警告するためのテキスト情報が生成される。
【0082】
続いて、ステップS63で、右足の移動角度の時系列データに基づいて、評価対象時間内の右足位置を解析する。そして、ステップS65で、右足位置の条件が満足されたか否かを判断する。ステップS65で“NO”の場合、つまり、右足の位置が条件とは逆の位置であると判断される場合には、ステップS67で、右足位置の評価を「不可」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS69で、当該右足位置について、「警告」のテキスト情報をメモリに生成する。右足が条件とは異なる位置に存在するので、当該事項を警告するためのテキスト情報が生成される。ステップS69を終了したとき、または、ステップS65で“YES”の場合、またはステップS57で“YES”の場合には、処理はステップS71に進む。
【0083】
なお、この実施例では、車両速度の条件が満足されない場合に、右足位置の条件を判定するようにしている。これは、基本的には、車両速度が十分に減速されていない場合に、すぐに減速可能なように、ブレーキの構えができているかどうかを確認するためである。つまり、車両速度が既に十分に減速されている場合には、特にブレーキの構えをしていなくとも、安全確保に支障がないとの考え方によっている。たとえば、危険箇所が交差点であり、かつ右左折行動が生起される場合、安全確認および安全確保のために速度が十分に減速される必要があり、したがって、車両速度の条件に適切な値を設定することによって、安全を確保することが考えられる。一方、危険箇所が直進されるような場合、右左折が生起される場合よりも速度が高めに設定され得るので、右足位置の条件としてブレーキ位置を設定し、ブレーキの構えによって安全度を高めるようにすることが考えられる。ただし、他の実施例では、右足位置を車両速度に関係なく判断するようにしてもよく、その場合には、ステップS63からステップS69の処理を、ステップS57で“YES”の場合に続けて実行されるようにすればよい。
【0084】
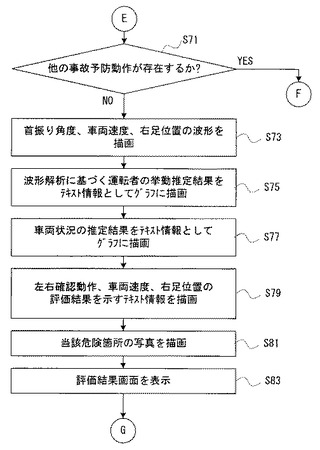
図11のステップS71では、他の事故予防動作が存在するか否かを判断する。ステップS71で“YES”の場合、つまり、当該危険箇所に対して、他の事故予防動作が設定されている場合には、処理は、図8のステップS23に戻る。
【0085】
一方、ステップS71で“NO”の場合には、当該危険箇所に対する運転行動の評価結果の出力を行う。この実施例では、図13に示すような評価結果画面が表示装置に表示され、またはプリンタで用紙に印刷される。
【0086】
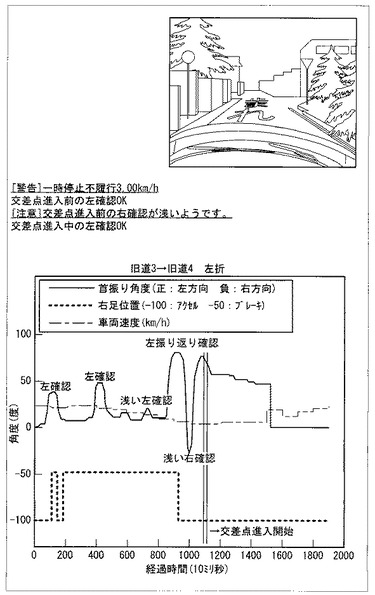
具体的には、ステップS73で、首振り角度、車両速度、右足位置の波形(時間変化)を描画する。これによって、図13の画面の下部に示すように、それぞれの波形のグラフが描画される。
【0087】
なお、図13のグラフの縦軸は角度(度)を表し、ほぼ中央に0が設定され、上方向が正、下方向が負である。首振り角度が正の場合は、左方向への首振りを示し、首振り角度が負の場合は、右方向への首振りを示す。また、横軸は経過時間(10ミリ秒)を表し、左端が0(危険箇所の50m手前の時刻ta)に設定される。この枠内に、首振り角度、車両速度および右足位置の波形が描画される。なお、枠の上側には、当該危険箇所の名称が表示されている。図13では、首振り角度の波形は実線で描かれ、車両速度の波形は破線で描かれ、右足位置の波形は点線で描かれている。右足位置については、角度の目盛−100がアクセルペダル28側を示し、−50がブレーキペダル30側を示すように調整されている。また、車両速度については、角度の目盛がそのまま速度(km/h)を示している。なお、図では表現できないが、各波形は互いに異なる色を用いて描画されることによって区別可能にされてもよい。
【0088】
続くステップS75で、波形解析に基づく運転者の挙動推定結果をテキスト情報としてグラフに描画する。これにより、どの時点でどのような確認動作を実行したかが表示される。具体的には、ステップS19およびS21の解析結果から、実行された左右確認動作を特定し、各確認動作の方向と深さとを示すテキストを、首振り角度の波形の対応する位置に描画する。首振り角度の波形とともに、確認動作を示すテキストが表示されるので、つまり、頭部の挙動を示す波形のグラフに、左右確認動作の注釈を付与することができるので、運転者の左右確認の挙動を簡単に把握することができる。
【0089】
また、ステップS77で、車両状況の推定結果をテキスト情報としてグラフに描画する。これにより、どの時点で危険箇所(交差点など)に進入したか等が表示される。図13では、危険箇所直上(進入直後)の時刻tb、または交差点進入開始時刻tb’に対応する位置に、上下方向に延びる2重線が描画される。さらに、「危険箇所(交差点)進入開始」を示すテキストが表示されている。首振り角度、右足位置および車両速度の各波形とともに危険箇所に進入した時点が明示されるので、危険箇所の手前、直前、直後などでの挙動の違いや変化などを容易に把握することができる。
【0090】
ステップS79では、左右確認動作、車両速度、右足位置の評価結果を示すテキスト情報を描画する。これにより、事故予防動作が正しくなされたかどうかが明示されるとともに、運転者の行動に予防安全の観点からみて改善すべき点がある場合には、当該事項が示される。図13では、グラフの上側に、評価結果を示すテキストが表示されている。当該危険箇所に複数の事故予防動作が設定されている場合、設定された順に、各事故予防動作の評価結果が示される。図13の例で、一番上の文は、「警告」のテキスト情報であり、警告は事故予防動作が行われなかったときの判定結果である。「警告」のテキスト情報は、たとえば赤色の文字によって表示される。この事故予防動作は一時停止であり、評価結果として、一時停止不履行であることと、そのときの車速とが示されている。上から2番目の文は、「OK」のテキスト情報である。交差点進入前の左確認が正しく行われたことが示されている。「OK」のテキスト情報は、たとえば青色の文字で表示される。3番目の文は、「注意」のテキスト情報である。交差点進入前の右確認が浅いことが示されている。「注意」のテキスト情報は、たとえばオレンジ色で表示される。4番目の文は「OK」のテキスト情報である。交差点進入中の左確認が正しく行われたことが示されている。
【0091】
ステップS81では、当該危険箇所の写真を描画する。写真データはROMまたはHDDに予め記憶されている。図13では、画面の上部右側に示されている。危険箇所の写真を表示することによって、当該危険箇所がどのように危険なのかを認識させることができ、したがって、どのような事故予防動作が必要であるかを容易に説明することができる。
【0092】
ステップS83では、描画した評価結果画面を出力する。この実施例では、表示装置に表示する。これによって、図13に示すような評価結果画面が表示される。これにより、このシステム10の使用者は、運転者の運転行動を容易に把握することができる。運転者は、当該危険箇所に対する自分の運転行動(左右確認動作、右足位置、車両速度)の時間変化を波形グラフによって一目で確認することができるとともに、評価結果を示すテキストによって事故予防動作の正否や達成度、改善点等も容易に知ることができる。この評価結果画面は、運転者に対して気づきを与えることができるので、教育上有用である。また、運転者だけでなく、教習所指導員等も、運転者の運転行動を容易に把握することができるので、指導や助言等をより的確に行うことができる。
【0093】
なお、この実施例では、定義された事故予防動作に対する運転者の運転行動の評価結果と一緒に、首振り角度(頭部の挙動)の波形、車速の波形、および右足位置(右足先の挙動)の波形をグラフで表示するようにしているが、他の実施例では、評価結果のみを出力するようにしてもよい。また、グラフ上には、必ずしも首振り角度の波形、車速の波形、および右足位置の波形のすべてを同時に出力しなくてもよく、いずれか1つまたはいずれかの組合せが出力されるようにしてもよい。
【0094】
ステップS83を終了すると、処理はステップS85に進み、評価結果に基づいて運転者の運転行動の採点が行われる。
【0095】
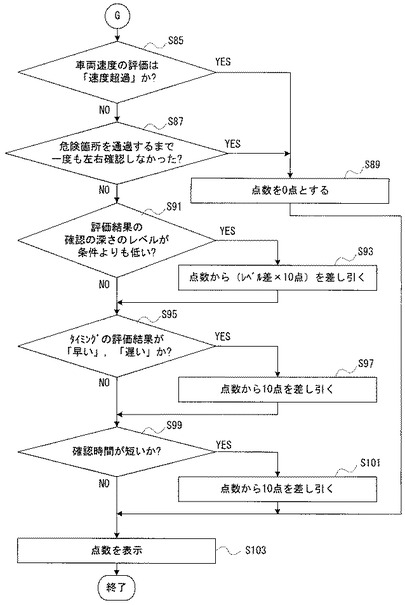
図12のステップS85では、車両速度の評価が「速度超過」であるか否かを判断する。ステップS85で“YES”の場合、処理はステップS89へ進む。一方、ステップS85で“NO”の場合、ステップS87で、危険箇所を通過するまで一度も左右確認をしなかったか否かを判断する。ステップS87で“YES”の場合、つまり、左右確認動作の評価結果が「不確認」である場合には、処理はステップS89へ進む。
【0096】
ステップS89では、運転者の点数を0点とする。このシステム10では、運転者の首振り角度によって左右確認動作が行われたか否かを判断するようにしており、厳密に運転者の視線が左右方向に向けられたかどうかを検出するようなことはない。左右確認を行おうとする際に車速が速過ぎると、よく見えないので、しっかりとした確認がなされるためには、車速は十分に減速される必要がある。そのため、この実施例では、左右に首振りを行ったことが検出される場合であっても、車両速度が超過していれば、目視による十分な確認が行われたとはみなさないこととした。したがって、速度超過の場合には、他の評価項目の結果に関係なく、0点とする。このように車速を評価項目に加えることによって、運転者の首振り確認動作が本来の左右確認の意図を持ったものであるかどうかを把握することができる。したがって、このシステム10を運転教習や再教育等に利用する場合に、運転者(受講者)の形だけの左右確認(確認する振り)に対して、合格点が与えられないようにすることができる。また、危険箇所を通過する際に一度も左右確認を行わないのは、運転者に事故予防意識がないと判断されるので、その場合にも、他の評価項目の結果に関わらず、0点とする。ステップS89を終了すると、処理はステップS103に進む。
【0097】
一方、ステップS87で“NO”の場合には、減点法によって採点を行う。なお、点数の初期値は満点(たとえば100点)である。具体的には、ステップS91で、評価結果の確認の深さのレベルが条件よりも低いか否かを判断する。確認レベルは、確認の深さに応じて設定されており、振り返り確認動作の場合、確認レベルは3、普通の確認動作の場合、確認レベルは2、浅い確認動作の場合、確認レベルは1、確認無しの場合、確認レベルは0である。ステップS91で“YES”の場合、つまり、評価項目に定義されている確認の深さのレベルよりも、評価結果の確認の深さのレベルが低かった場合には、ステップS93で、(レベル差×所定値(たとえば10点))を点数から差し引く。
【0098】
ステップS91で“NO”の場合には、処理はそのままステップS95に進む。ステップS95では、タイミングの評価結果が「早い」または「遅い」であるか否かを判断する。ステップS95で“YES”の場合には、ステップS97で、点数から所定値(たとえば10点)を差し引く。
【0099】
ステップS95で“NO”の場合には、処理はそのままステップS99に進む。ステップS99では、確認時間が短いか否かを判断する。具体的には、確認時間が所定の閾値(たとえば0.3s)未満であるか否かを判断する。ステップS99で“YES”の場合には、ステップS101で、点数から所定値(たとえば10点)を差し引く。ステップS99で“NO”の場合には、処理はそのままステップS103に進む。
【0100】
ステップS103では、点数を出力する。この実施例では、点数を表示装置に表示する。これにより、当該危険箇所に対する運転者の運転行動の点数が表示される。なお、当該危険箇所に対して複数の事故予防動作が設定されている場合、事故予防動作ごとにステップS91−S101の減点処理が行われる。また、点数は、コース上の他の危険箇所に対する点数と合算されてよく、その場合、コースに対する点数が得られる。点数は、教習や再教育等の運営者が受講者(運転者)のたとえば合否、教育過程、成長過程などの管理をするのに有用である。
【0101】
発明者らは、このシステム10の精度を定量的に評価するため、路上実車実験を行った。実験は、ある自動車教習所が主催するタクシー運転者再教育講習(事故を起こしたタクシー運転者を対象とした再教育プログラム)の参加者を対象に実施した。実験の際には安全のため、自動車教習所の教習車を使用し、教習員が助手席に同乗した。被験者はプロのタクシー運転者23名(男性21名,女性2名)である。各被験者は一人、あるいは二人一組となり、再教育講習カリキュラムで定められた所定の2コースのいずれか(コース1は京都府南部の公道10.9km、コース2は京都府南部の公道3.6km)を角速度センサ14および16を装着した状態で走行した。
【0102】
こうして計測したデータのうち、(A)幹線道路から信号交差点を右折して生活道路へ入る区間、(B)幹線道路から無信号交差点を左折して生活道路へ入る区間、(C)生活道路から別の生活道路へと無信号交差点を左折する区間、(D)生活道路から別の生活道路へと無信号交差点を右折する区間、(E)人通りの多い無信号交差点を直進する区間に特に着目し、重点的に解析を行った。なお、これら5区間は、再教育講習において、教習員が運転者の動きを重点的に観察する箇所でもある。
【0103】
まず、実験の様子を収録したビデオを指導員に全編目視でチェックしてもらい、被験者23人の各地点における運転行動を評価項目に基づいて評価してもらった。なお、今回の実験では、解析対象とした運転行動の総数は85である。85行動のうち、指導員によって良い運転と評価されたのは25行動であり、60行動は最低限なされるべき事故予防動作のいずれかを欠く、あるいはなされていたとしても上述の(1)〜(7)の評価項目の基準を完全には満たしていない、改善を要する運転行動であるとされた。
【0104】
次に、システム10による自動評価結果が、どの程度指導員評価と一致するのか検証した。システム10では、全85行動のうち24行動が良い運転と判定され、そのうち指導員評価と一致したのは22行動であった(適合率91.7%、再現率88.0%)。同様に、61行動がシステム10によって改善を要する運転行動と判定され、そのうち、(1)〜(7)のどの評価項目が満たされていないか(要改善ポイントは何か)という情報までが指導員と完全に一致したのは51行動であった(適合率83.6%、再現率85.0%)。
【0105】
このように、実験により、このシステム10によれば、指導員による評価結果と80%以上の精度で一致する評価を行うことができることが確認されている。
【0106】
なお、上述の実施例では、事故予防動作の評価項目として右足位置を含めており、右足位置の評価が不要な事故予防動作については、右足位置の評価項目を定義無しとして対応するようにしているが、他の実施例では、評価項目として右足位置を含まない事故予防動作定義がなされてもよい。右足位置の評価が必須となる危険箇所は、典型的には、直進される場所であり、走行上、十分な減速が必要ないような場所である。そのような危険箇所では、ブレーキの構えが行われている必要があり、したがって、右足位置の評価項目が必要となる。しかし、コース上の危険箇所として、すべて右左折行動を生起させる場所が採用されるような場合であれば、右足位置の評価項目は設けられなくてよい。
【0107】
また、上述の各実施例では、運転者の頭部および右足先の動きを検出するために、角速度センサ14および16を使用したが、他の実施例では、別の検出装置が使用されてもよい。たとえば、加速度センサを使用することも可能である。運転者の左右確認動作および右足の移動に応じて加速度が変化するので、動きデータとしての頭部の加速度データおよび右足先の加速度データを解析することによって、左右確認動作および右足の位置を解析することができる。
【0108】
ここまでで実施例の交通ハザードマップ生成装置100の一部を構成する運転行動自動評価システム10を説明したので、続いて交通ハザードマップ生成装置100の実施例の全体を説明する。
【0109】
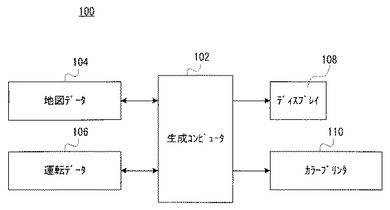
この実施例では、交通ハザードマップ生成装置100は、生成コンピュータ102を含み、この生成コンピュータ102は、地図データを記憶する地図データ記憶装置104および図2‐図13を参照して説明した運転行動自動評価システム10における頭部角速度センサ14(図3)やGPS受信機20を利用して頭部角速度データおよび位置データを含む運転データを記憶する運転データ記憶装置106に結合される。地図データ記憶装置104は、電子道路地図などの地図データを蓄積し、さらには生成コンピュータ102で特定した危険箇所をそのような道路地図上に図示した交通ハザードマップ(のデータ)を必要に応じて保存する。
【0110】
なお、運転データ記憶装置106は、各運転者の頭部角速度センサ14(図3)で計測した角速度データ(運転者の頭部動きデータ)やGPS受信機20で獲得したGPSデータなどを含む全ての運転データを、各運転者毎に、運転開始から終了まで記憶しておく。運転行動自動評価システム10では先に説明したように所定箇所として設定した交差点付近だけでこれらの運転データを取得して運転行動を評価するだけであったが、交通ハザードマップ生成装置100では、運転開始から終了まで連続する角速度データや位置データとして取得し、運転データ記憶装置106に記憶しておく。そして、このとき、運転データ記憶装置106には、図2の解析用コンピュータ22が図12に従って算出した各運転者の評価点のデータも併せて記憶する。評価点データを記憶する理由は、後述のステップS113で、この評価点データを利用して各運転者を第1群運転者または第2群運転者のどちらかに区分するためである。したがって、第1群運転者および第2群運転者を事前に区分けするようにすれば、評価点データを記憶させておく必要はない。たとえば、発明者等が実験で行なったように、自動車教習所の指導員および一般運転者に試験走行をしてもらうような場合には、前者が第1群運転者として、後者が第2群運転者として事前に区分できる。
【0111】
なお、運転データ記憶装置106に運転データや評価点データを記憶させる方法は、たとえば、ネットワーク(図示せず)を使って解析用コンピュータ22から生成コンピュータ102に転送して記憶させる方法、USBメモリや光ディスク媒体などの可搬記憶装置を用いて記憶させる方法などが考えられるが、任意の方法が採用されてよい。
【0112】
生成コンピュータ102はまた、生成した交通ハザードマップを、地図データ記憶装置104に記憶している交通ハザードマップデータに基づいて、ディスプレイ108で表示したり、必要に応じて、カラープリンタ110で印刷出力したりする。さらに、図示していないが、生成した交通ハザードマップ(のデータ)は、ネットワークを介して他所へ転送されてもよい。
【0113】
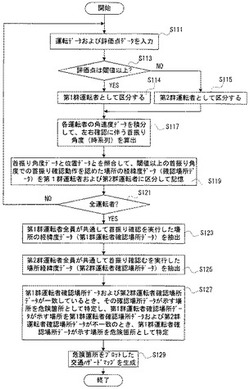
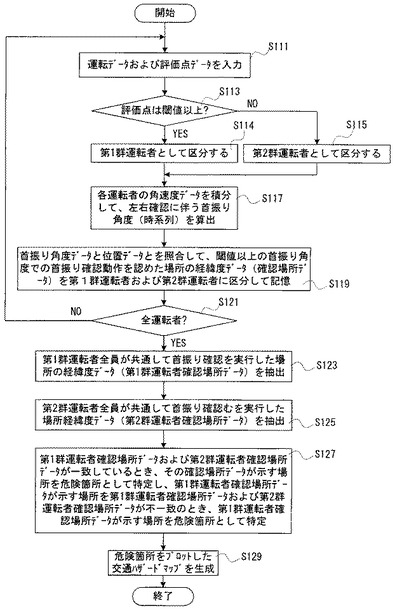
図14を参照して、最初のステップS111で、生成コンピュータ102は、運転データ記憶装置104から、運転者1人ずつ、当該運転者の運転データ、少なくとも、頭部角速度センサ14(図2)で検出した角速度データ(頭部動きデータ)およびGPS受信機20(図2)によって検出した位置データ、ならびに必要な場合に評価点データを取り込む。
【0114】
ついで、ステップS113において、生成コンピュータ102は、そのときの運転者の評価点が閾値を超えているかどうか判断する。“YES”なら、生成コンピュータ102は次のステップS114において当該運転者を第1群に属する運転者(第1群運転者)に区分する。第1群とは、運転技術が優れた優良運転者もしくは熟練運転者が属するグループを意味し、第1群運転者とはしたがって、優良運転者もしくは熟練運転者を意味する。ステップS113の判断が“NO”なら、生成コンピュータ102は次のステップS115において当該運転者を第2群に属する運転者(第2群運転者)に区分する。第2群とは、第1群に区分できない運転技術が優れているとは言い難い運転者もしくは熟練しているとは言い難い運転者が属するグループを意味し、第2群運転者とはしたがって、非優良運転者もしくは非熟練運転者を意味する。
【0115】
ただし、上述のように事前に第1群運転者および第2群運転者が区分されるのであれば、このステップS113,S114およびS115は不要であるし、ステップS111で評価点データを取り込む必要もない。この場合には、ステップS111において、第1群運転者か第2群運転者かのラベル付で個々の運転者の運転データを入力する必要がある。
【0116】
次のステップS117において、生成コンピュータ102は、ステップS111で入力した運転データに含まれる頭部角速度データを積分して左右確認時の頭部動き角度(首振り角度)を、たとえば図13における波形図のような時系列データとして算出する。ただし、運転行動評価システム10からそのまま運転データを取り込む実施例であれば、運転データには既に運転者の首振り角度が含まれる(ステップS113)が、ここで再び首振り角度を計算する理由は、ステップS113では運転行動評価のために危険箇所として予め設定された場所での時刻ta‐tcの限られた範囲での首振り角度を計算するだけであるので、顕在的な危険箇所だけでなく潜在的な危険箇所を検出する交通ハザードマップ装置100の目的のためには、評価のために予め設定した場所以外でも首振り角度データが必要だからである。
【0117】
そして、ステップS119において、生成コンピュータ102は、ステップS117で計算した時系列首振り角度データと位置データ(GPSデータ)とを照合して、所定の閾値以上の首振り角度が生起した場所の経緯度データないし位置データを、確認場所データとして第1群運転者と第2群運転者とに分けて記憶する。この経緯度データの記憶場所は、生成コンピュータ102の内部メモリである。ただし、運転データ記憶装置106など任意の記憶場所であってよい。
【0118】
ステップS111‐S119は、ステップS121で全運転者分の処理が終了したかどうかの判断において“YES”が判断されるまで繰り返し実行される。
【0119】
ステップS121で“YES”が判断されたとき、生成コンピュータ102は、ステップS123において、ステップS119で記憶した経緯度データ(確認場所データ)を参照して、第1群運転者全員が共通して一定以上の角度で首振り(頭部動き)を実行した場所の経緯度データ(第1群運転者確認地点データ)を抽出する。つまり、ステップS123ではステップS119で記憶手段に格納されている第1群運転者の確認場所データを全ての第1群運転者について論理積(AND)をとることによって、全第1群運転者が共通して首振り確認動作を行なった確認場所を特定する。ただし、各運転者の位置データがたとえばGPSの受信状況などで微妙にずれていることも考えられる。そこで、この実施例では、GPSの分解能に相当する誤差を除くために、たとえば、最初の第1群運転者の第1群確認場所データが示す場所から後続の第1群運転者の第1群確認場所データが示す場所が10m以下の近傍を示している場合には、同じ第1運転者確認場所データあるとみなすようにした。
【0120】
続くステップS125において、生成コンピュータ102は、ステップS119で記憶した経緯度データを参照して、第2群運転者全員が共通して一定以上の角度で首振り(頭部動き)を実行した場所の経緯度データ(第2群運転者確認場所データ)を抽出する。このステップS125での抽出方法はステップS123での抽出方法と同じでよい。つまり、ステップS125では、第2群運転者確認場所データの論理積(AND)をとることによって、全第2群運転者が共通して首振り確認動作を行なった場所(経緯度)を特定する。
【0121】
そして、ステップS127において、生成コンピュータ102は、第1群運転者確認場所データと第2群運転者確認場所データとが一致している場合には、それらの確認場所データが示す場所を危険箇所として特定するとともに、第1群運転者確認場所データと第2群運転者確認場所データとが不一致の場合、第1群運転者確認場所データが示す場所を危険箇所として特定する。それは次のような発明者等の知見に基づく。
(1)明らかに見通しが悪いような場所、明らかに危険そうな場所では、危険認知があまりできない人(第2群運転者)であっても、事故を未然に防ぐための防御的行動ないし予防動作(減速、左右確認)を行なう。つまり、見るからに危険だと判断できる箇所では、多くの人が防御的行動(事故予防動作)を自発的に実行するため、潜在的な危険度は、実はそれほど高くないとも考えられる。少なくとも、このような場所では、各運転者の技能差が出にくい(皆が防御的行動をとるため)。
(2)見通しのよい場所において、(対向車などが来ていないにもかかわらず)減速し左右確認することは、周囲の交通を乱すことにつながる。たとえ、自動車教習所の指導員であっても、見晴らしのよい場所では、外乱がないときには減速や左右確認は行わない。
(3)「一見」なんでもないように見えて、実は見通しが悪い交差点(たとえば、十宇交差点において、一方は見通ししがよいが、もう一方にブロック塀などの遮蔽物があって見通しが悪くなっている箇所、など)などでは、危険認知ができる人(第1群運転者)であれば防御的行動(事故予防動作)をとるものの、危険認知があまりできない人(第2群運転者)では、警戒を忘れ、速度も落とさずに進入してしまうことがある。このような交差点こそ、潜在的に危険であり、また、各運転者の技能差が出やすい場所と考えられる。
(4)運転技能評価システム10を利用して運転データを取得した場合、各運転者が、どこで、どのような頭部の動きをしていたのかが分かる。言い換えると、その運転者が、どこで、本来すべきであった防御的行動または予防動作をしなかったのかが分かる。
(5)そこで、図1に示す実施例の交通ハザードマップ生成装置100においては、危険認知ができる運転者グループ(第1群)および危険認知ができない運転者グループ(第2群)ごとに運転データを取得し、第1群運転者(危険認知ができる運転者)が「共通して見る」箇所を地図上にプロットする。多人数の第1群運転者確認場所データの「AND」をとることで、周囲の交通状況に起因する動き(対向車がきたのでそちらを見た、など)を排除し、地形的要因による防御行動(確認行動)のみを抽出する。1人か2人だけの第1群運転者が「たまたま見た」のであれば、全員の第1群運転者確認場所データのANDをとった場合、たまたま生起した第1群運転者確認場所データは残らなくなる。「見通しが悪いから」「危険だと思ったので」見た、のであれば、全員の第1群運転者確認場所データのANDをとっても残る。したがって、危険認知ができる第1群運転者が(首振り確認動作によって)共通して見る箇所をプロットすれば、(1)の明らかに危険そうな箇所(顕在的危険箇所)と、(3)の「一見」なんでもないように見えて、実は見通しが悪い場所(潜在的危険箇所)とを抽出できると期待できる。
(6)次に、危険認知があまりできない第2群運転者の頭部の動きを(5)の上にプロットする。第1群運転者とで第2群運転者が共通して首振り確認動作を行なう場所は、(1)の明らかに危険そうな場所と推察できる。また、第1群運転者は見るものの、そうでない第2群運転者は見ない箇所は(3)の「一見」なんでもないように見えて、実は見通しが悪い場所と推測できる。つまり、第1群運転者確認場所データと第2群運転者確認場所データとの排他的論理和(NOR)を取ることによって、潜在的危険箇所を特定することができる。
(7)以上の手順により、(3)の「一見」なんでもないように見えて、実は危険な場所を危険箇所(潜在的危険箇所)として特定することができる。
【0122】
つまり、ステップS127で、第1群運転者確認場所データと第2群運転者確認場所データとが一致している場合には、それらの確認場所データが示す場所を顕在的危険箇所として特定する。一方で、第1群運転者確認場所データと第2群運転者確認場所データとが不一致の場合、第1群運転者確認場所データが示す場所を潜在的危険箇所として特定する。
【0123】
ステップS129において、ステップS127で特定した危険箇所をプロットした交通ハザードマップを生成し、地図データ記憶装置104に保存する。必要に応じて、ディスプレイ108に表示したり、カラープリンタ110で印刷したりするようにしてもよい。
【0124】
この場合、ステップS127を実行した結果判明した、顕在的危険箇所と潜在的危険箇所とは区別できるように地図上にプロットすることが望ましい。
【0125】
しかしながら、顕在的危険箇所と潜在的危険箇所とを区別する必要ないなら、ステップS127では、第2群運転者確認場所データとの比較なしに、第1群運転者確認場所データだけを参照して危険箇所を特定するようにしてもよい。
【0126】
発明者等が行なった実験では、実施例の交通ハザードマップ生成装置100の有効性が確認できた。実験では、第1群運転者(熟練者)としての自動車教習所の指導員4名と、第2群運転者としての一般運転者3名に、京田辺市のコース3.6kmを走行してもらった。
【0127】
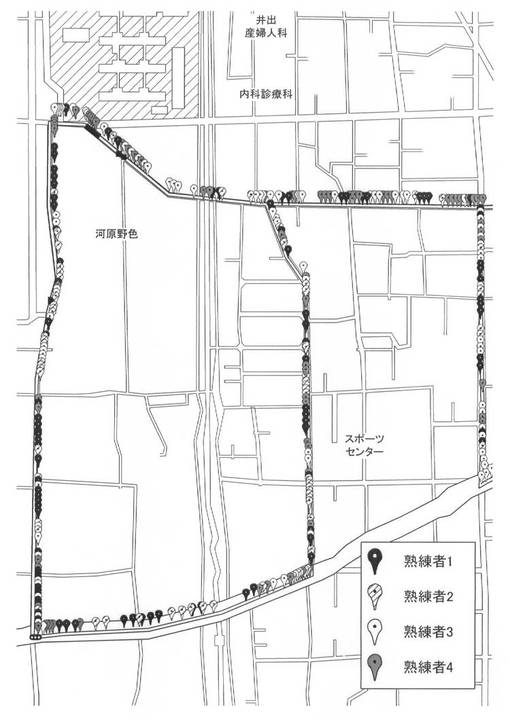
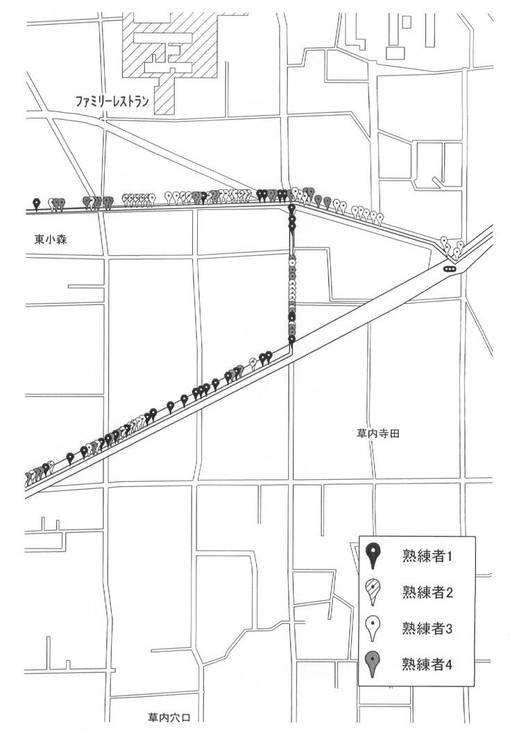
図15Aおよび図15Bは、ステップS117で得た時系列運転データに従って、どの指導員(熟練者1‐4)が、どの場所で確認行動すなわち首振り確認動作をしたのかを、地図上に色の違うバルーン図形を使ってプロットしたものである。ただし、頭部角速度センサ14によって±50deg/s以上の頭部の動きがあったと認められた場合、首振り確認行動をしたとみなすものとし、指導員(第1群運転者)の少なくとも一人が首振り確認した場所を全てプロットしている。ただし、図15Aおよび図15Bで1枚の地図を示し、図15Aが左半分であり、図15Bが右半分である。図16Aおよび図16B、図17Aおよび図17Bも同様である。
【0128】
図15を見ると、地形的要因による事故予防動作と、周囲の交通状況に起因する動き(対向車がきたのでそちらを見た、など)が混在し、コース上のほぼ全ての地点にプロットがなされていることが分かる。
【0129】
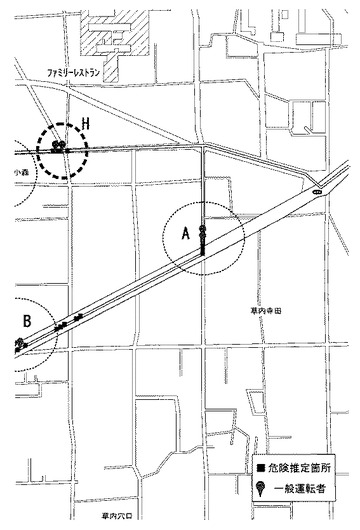
次に、図15のプロットを整理し、全ての指導員(第1群運転者)が共通して見た箇所のみを抽出した地図を図16(図16Aおよび図16B)に示す。GPSの誤差はおおよそ半径10m以内といわれているため、まず熟練者1(第1群運転者)の任意のプロットを選択し、周囲10m以内に他の熟練者(第1群運転者)の首振り確認動作があるもののみを残した。
【0130】
図16において、黒の四角で表示されているのが、全部の指導員(第1群運転者)が共通して首振り確認動作を実行した場所である。なお、図中の破線円は、指導員が手動で設定した危険箇所である。太い破線円はそのなかでも特に重視している危険箇所である。四角と破線円を比較すると、実際の第1群運転者確認場所と第1群運転者が危険と感じている場所とがかなり共通していることが見て取れる。
【0131】
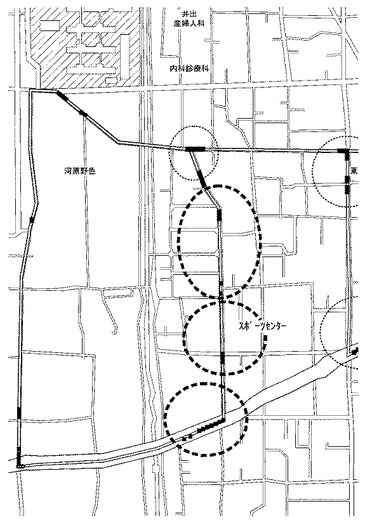
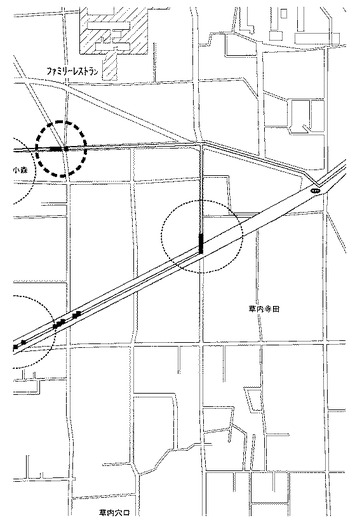
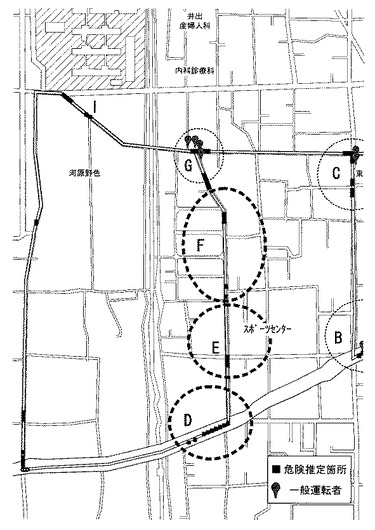
さらに、図16に、一般運転者(第2群運転者)3名が共通して首振り確認動作をした箇所を重畳してプロットした地図が図17Aおよび図17Bに示される。図17で、バルーン図形で示されているのが一般運転者(第2群運転者)が共通して首振り確認動作をした場所、つまり第2群運転者確認場所である。これを見ると、指導員(第1群運転者)が共通して首振り確認動作をする箇所と、一般運転者(第2群運転者)が共通して首振り確認動作をする箇所には、かなりの違いが認められる。
【0132】
第1群運転者である指導員と、第2群運転者である一般運転者が共通して首振り確認動作を行なった場所(図17中の場所A,B,C,G,H)は、信号交差点であったり、みるからに見通しの悪い交差点であったりするので、顕在的な危険箇所と考えられる。他方で、第1群運転者である指導員は首振り確認動作を実行したが第2群運転者である一般運転者は首振り確認動作を実行しなかった場所(図17中の場所D,E,F)は、無信号交差点が殆どであり、潜在的な危険箇所と考えられる。
【0133】
さらに、図17において太い破線円で示される重点危険箇所(指導員が手動で設定)を見ると、4箇所中の3箇所において、指導員は見ているものの、一般運転者は見ていないことが分かる。なお、本実験においては、指導員4名中、3名は、どの地点に危険箇所が設定されているか事前に知らされず走行している。
【0134】
このように、実験の結果より、図1および図14に示す実施例の交通ハザードマップ生成装置100によれば、自動的に危険箇所(特に、予防安全の観点から、各運転者の技能差が出やすい箇所)の推定が、或る程度できたと考えられる。
【0135】
また、図17において「I」で示す場所は、指導員(第1群運転者)が指摘していないにも拘らず、実際の走行実験では潜在的な危険箇所として抽出された場所である。この場所Iでは道路構造上、交通渋滞が頻繁に発生する。実験の様子を撮影したビデオで確認してみると、この場所に限らず、赤信号や渋滞などで車両が停止している際には、安全確認とは無関係に首振り確認動作が頻繁に生起していることが確認できた。しかしながら、実施例では、頭部の動きの生起は検出可能だが、その動きが首振り確認動作として生起したのか、単なるわき見として生起したのかは判断で着ない。そのため、首振り角速度から首振り角度を求め、首振り角度から確認行動なのかどうかを識別する必要がある。そのためには、自動車の速度も考慮して停車中と走行中を区別するなどの方法が考えられる。
【0136】
なお、上述の実施例では、交通ハザードマップ生成装置100は、運転行動自動評価システム10とは別のコンピュータ102で構成するように説明した。しかしながら、運転行動自動評価システムのコンピュータ、たとえば図2に示す解析用コンピュータ22が生成コンピュータ102と兼用されてもよい。したがって、特許請求の範囲で「コンピュータ」というときは、生成コンピュータ102、解析用コンピュータ22あるいは両者を指す場合があるものと理解されたい。
【符号の説明】
【0137】
10 …運転行動自動評価システム
12 …計測制御用コンピュータ
14 …角速度センサ(頭部)
18 …角速度センサ(車両)
20 …GPS受信機
22 …解析用コンピュータ
100 …交通ハザードマップ生成装置
102 …生成コンピュータ
104 …地図データ記憶装置
106 …運転データ記憶装置
【技術分野】
【0001】
この発明は交通ハザードマップ生成装置に関し、特に、自動車の運転者にとって真に危険な危険箇所を示す交通ハザードマップを生成する、新規な交通ハザードマップ生成装置に関する。
【背景技術】
【0002】
この種のものとして、交通安全地図(非特許文献1)がある。交通安全マップは過去の交通事故データをもとにして作成されている。
【非特許文献1】http://www.kotsu-anzen.jp/
【発明の開示】
【発明が解決しようとする課題】
【0003】
非特許文献1の地図の粒度は粗い(たとえば、京田辺市では1箇所のみ表示)ため、自動車運転者に対するものとしては不十分である。
【0004】
それゆえに、この発明の主たる目的は、新規な、交通ハザードマップ生成装置を提供することである。
【0005】
この発明の他の目的は、自動車運転者に有効な交通ハザードマップを生成することができる、交通ハザードマップ生成装置を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施の形態との対応関係を示したものであって、本発明を何ら限定するものではない。
【0007】
第1の発明は、複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段を備える、交通ハザードマップ生成装置である。
【0008】
第1の発明では、交通ハザードマップ生成装置(100:実施例において相当する要素を例示する参照符号。以下、同じ。)は、実施例では、運転行動自動評価システム(10)に含まれる頭部動き検出手段(12,14)および位置検出手段(12,20)を利用する。動き検出手段は、運転者の頭部の動きデータを検出するためのものであり、たとえば頭部に装着された角速度センサを含む。位置検出手段は、自動車の位置データを検出するためのものであり、たとえばGPS受信機を含む。運転データ記憶手段(102)は、頭部の動きデータおよび自動車の位置データを含む運転データを記憶する。危険箇所特定手段(102,S119‐S127)は、第1群に属する複数の運転者の運転データに基づいて、たとえば第1群運転者が共通して首振り確認動作を行なった場所を危険箇所として特定する。
【0009】
明らかに見通しが悪い場所、明らかに危険そうな場所では、危険認知があまりできない運転者であっても、事故を未然に防ぐための予防動作(減速、左右確認)をする。つまり、見るからに危険だと判断できる箇所では、多くの運転者が予防動作を自発的にとるため、潜在的な危険度は、実はそれほど高くないとも考えられる。少なくとも、このような場所では、各運転者はほぼ全員が予防動作を実行するので、運転者毎の技能差はでにくい。他方、一見なんでもないように見えて、実は見通しが悪い交差点(たとえば、十字交差点において、一方は見通しがよいが、もう一方にブロック塀などの遮蔽物があって見通しが悪くなっている箇所、など)などでは、危険認知ができる運転者であれば予防動作を実行するものの、危険認知があまりできない運転者は、警戒を忘れ、速度も落とさずに進入してしまうことがある。このような交差点こそ、潜在的に危険であり、また、各運転者の技能差が出やすい場所と考えられる。そこで、危険認知が十分できる第1群運転者が全員たとえば首振り確認動作のような予防動作を実行した場所を真に危険な危険箇所として特定する。
【0010】
第1の発明によれば、第1群運転者の運転データに基づいて危険箇所を特定するので、運転者にとって真に危険な危険箇所を示す交通ハザードマップが生成できる。
【0011】
第2の発明は、第1の発明に従属し、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段をさらに備え、危険箇所特定手段は、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段を含み、第1群運転者確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0012】
第2の発明では、確認場所特定手段(102,S119)は、運転データに含まれる頭部動きデータおよび位置データに基づいて、運転者が所定以上の首振り角度で首振り確認動作を実行した場所(確認場所)を特定する。確認場所を示す確認場所データは、適宜の記憶手段に記憶される。そして、危険箇所特定手段に含まれる第1抽出手段(102,S123)は、適宜の記憶手段に記憶している確認場所データを参照して、第1群運転者の全員が首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する。この第1群運転者確認場所データが示す場所を危険箇所として特定する。複数の第1群運転者が共通して首振り確認動作をした場所を抽出するようにすれば、周囲の交通状況に起因する動き、たとえば、対向車がきたのでそちらを見たときなどの首振り確認動作をした場所を排除し、地形的要因による首振り確認動作をした場所のみを抽出できる。つまり、たまたま1人の第1群運転者が交通状況の関係で首振り確認動作をしただけであると、多人数の第1群運転者の首振り確認動作の生起場所を比較すれば、このような「たまたま」の首振り確認動作を除外できる。したがって、第2の発明によれば、危険認知が十分できる第1群運転者が全員首振り確認動作を実行した場所を危険箇所として特定するので、特定された危険箇所は十分信頼することができる。
【0013】
第3の発明は、第2の発明に従属し、危険箇所特定手段は、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段をさらに含み、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0014】
第3の発明では、危険箇所特定手段に含まれる第2抽出手段(102,S125)は、適宜の記憶手段に記憶している確認場所データを参照して、第2群運転者の全員が首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する。そして、危険箇所特定手段(102,S127)は、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者確認場所データが示す場所を危険箇所として特定する。第2群運転者は第1群運転者に比べて危険認知が十分できない運転手であるとする。このような第2群運転者が全員首振り確認動作をするということは、その場所は明らかな危険箇所(顕在的な危険箇所)である。他方、危険認知が十分できる第1群運転者が全員首振り確認した場所は、顕在的な危険箇所だけでなく、一見何でもないが実は危険な潜在的な危険箇所も含むと推定できる。したがって、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、少なくとも第1群運転者が首振り確認を実行した場所を潜在的な危険箇所として特定するようにしている。第3の発明によれば、一見何でもないように見えて実は危険な場所である、真に危険な場所を危険箇所として特定することができる。
【0015】
第4の発明は、第3の発明に従属し、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0016】
第4の発明では、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する。上述のように、第1群運転者および第2群運転者が全員共通して首振り確認動作を行う場所は明らかな危険箇所であるので、第4の発明によれば、第3の発明で特定した潜在的な危険箇所に加えて、顕在的な危険箇所も特定することができる。
【0017】
第5の発明は、複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転データを記憶する運転データ記憶手段、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段を備える、交通ハザードマップ生成装置である。
【0018】
第5の発明では、交通ハザードマップ生成装置(100)は、一例として、運転行動自動評価システム(10)に含まれる頭部動き検出手段(12,14)および位置検出手段(12,20)を利用する。動き検出手段は、たとえば頭部に装着された角速度センサを含み、運転者の頭部の動きデータを検出する。位置検出手段は、たとえばGPS受信機を含み、自動車の位置データを検出する。運転データ記憶手段(102)は、頭部の動きデータおよび自動車の位置データを含む運転データを記憶する。危険箇所特定手段(102,S119‐S127)は、第1群に属する複数の運転者の運転データに基づいて、たとえば第1群運転者が共通して首振り確認動作を行なった場所を危険箇所として特定する。
【0019】
詳しくいうと、確認場所特定手段(102,S119)は、運転データに含まれる頭部動きデータおよび位置データに基づいて、運転者が所定以上の首振り角度で首振り確認動作を実行した場所(確認場所)を特定する。確認場所を示す確認場所データは、適宜の記憶手段に記憶される。第1抽出手段(102,S123)は、記憶手段に記憶している確認場所データを参照して、第1群運転者の全員が首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する。第2抽出手段(102,S125)は、適宜の記憶手段に記憶している確認場所データを参照して、第2群運転者の全員が首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する。そして、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者確認場所データが示す場所を危険箇所として特定する。
【0020】
第5の発明によれば、顕在的な危険箇所だけでなく潜在的な危険箇所も特定できるので、運転者にとって極めて有効な交通ハザードマップが生成できる。
【0021】
つまり、第2群運転者が全員首振り確認動作をするということは、その場所は明らかな危険箇所(顕在的な危険箇所)である。他方、危険認知が十分できる第1群運転者が全員首振り確認した場所は、顕在的な危険箇所だけでなく、一見何でもないが実は危険な潜在的な危険箇所も含むと推定できる。このような潜在的危険箇所では第2群運転者は注意を怠り、速度も落とさずに進入してしまうことがある。つまり、潜在的危険箇所では第2群運転者は首振り確認動作をしないことが容易に推測できる。したがって、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき、第1群運転者が首振り確認を実行した場所を潜在的な危険箇所として特定するようにしたのである。
【0022】
第6の発明は、第5の発明に従属し、危険箇所特定手段は、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、交通ハザードマップ生成装置である。
【0023】
第6の発明では、第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する。つまり、第1群運転者および第2群運転者が全員共通して首振り確認動作を行う場所は明らかな危険箇所であるので、第6の発明によれば、第5の発明で特定した潜在的な危険箇所に加えて、顕在的な危険箇所も特定することができる。
【0024】
第7の発明は、第1ないし第6の発明に従属し、所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶する動作定義データ記憶手段、および動きデータ、位置データおよび動作定義データに基づいて、事故予防動作が正しくなされたか否かを評価して評価点を算出する評価手段をさらに備え、評価点が閾値を超えた運転者を第1群運転者とし、それ以外の運転者を第2群運転者とする、交通ハザードマップ生成装置である。
【0025】
第7の発明では、動作定義データ記憶手段(22)は、所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶している。所定箇所としては典型的には三叉路以上の交差点が評価対象箇所として採用されてよい。評価手段(22、S27、S33、S39、S45、S51、S57)は、頭部動きデータ、位置データおよび動作定義データに基づいて、事故予防動作が正しくなされたか否かを評価する。事故予防動作は、少なくとも左右確認動作に関する評価項目および車速に関する評価項目を用いて定義されており、したがって、評価項目が満足されたかどうかを判断することによって、運転者の事故予防動作が評価され、その結果が評価点として採点(算出)される。危険箇所特定手段(S127)は、運転データ記憶手段に記憶されている、評価手段によって算出した評価点が閾値を超えた運転者を第1群運転者と認定し、それ以外の運転者を第2群運転者として区分する。
【0026】
第7の発明によれば、第1群運転者および第2群運転者を客観的に区分することができるので、得られた交通ハザードマップの信頼性が担保できる。
【0027】
第8の発明は、第1ないし第7の発明に従属し、頭部動きデータ検出手段は、運転者の頭部に装着され、左右への首振り角度を検出する首振り角度センサを含む、交通ハザードマップ生成装置である。
【0028】
第8の発明では、首振り角度センサによって頭部の首振り角度を直接検出することができるので、たとえば画像処理によって頭部の首振り角度を計算する場合に比べて、複雑な処理や計算が不要であり、簡単であるとともに高速に処理できるので、危険箇所を確実に特定または検出することができる。
【0029】
第9の発明は、複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、コンピュータを、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段として機能させる、交通ハザードマップ生成プログラムである。
【0030】
第9の発明によれば、第1の発明と同じ効果が期待できる。
【0031】
第10の発明は、複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、コンピュータを、運転者の頭部の動きデータを検出する頭部動き検出手段、自動車の位置データを検出する位置検出手段、それぞれが頭部動き検出手段によって検出された頭部の動きデータおよび位置検出手段によって検出された自動車の位置データを含む運転データを記憶する運転データ記憶手段、頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および第1群運転者確認場所データと第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定し、第1群運転者確認場所データと第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段して機能させる、交通ハザードマップ生成プログラムである。
【0032】
第10の発明によれば、第5の発明と同様の効果が期待できる。
【発明の効果】
【0033】
この発明によれば、顕在的に危険箇所だけでなく潜在的な危険箇所も特定できるので、危険認知が十分でない運転者にとって有効な交通ハザードマップを生成することができる。
【0034】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0035】
【図1】図1はこの発明の一実施例の交通ハザードマップ生成装置を示すブロック図である。
【図2】図2はこの発明の一実施例の交通ハザードマップ生成装置の一部を形成する運転行動自動評価システムの構成を示すブロック図である。
【図3】図3は運転者の帽子に装着された角速度センサの一例を示す図解図である。
【図4】図4は運転者の右足先に装着された角速度センサの一例を示す図解図である。
【図5】図5は運転者の右足がアクセルペダルからブレーキペダル側に移動された様子を示す図解図である。
【図6】図6は危険箇所情報の一例を示す図解図である。
【図7】図7は運転行動自動評価システムの動作の一例の一部を示すフロー図である。
【図8】図8は図7の続きの一部を示すフロー図である。
【図9】図9は図8の続きの一部を示すフロー図である。
【図10】図10は図8および図9の続きの一部を示すフロー図である。
【図11】図11は図10の続きの一部を示すフロー図である。
【図12】図12は図11の続きを示すフロー図である。
【図13】図13は評価結果表示画面の一例を示す図解図である。
【図14】図14は実施例の交通ハザードマップ生成装置のコンピュータの動作を示すフロー図である。
【図15A】図15Aは実験において複数の第1群運転者画像それぞれ首振り確認動作をした場所を示す地図の左半分を示す図解図である。
【図15B】図15Bは実験において複数の第1群運転者画像それぞれ首振り確認動作をした場所を示す地図の右半分を示す図解図である。
【図16A】図16Aは実験において第1群運転者全員が首振り確認動作をした場所と第1群運転者が手動的に危険箇所であると指摘した場所を示す地図の左半分を示す図解図である。
【図16B】図16Bは実験において第1群運転者全員が首振り確認動作をした場所と第1群運転者が手動的に危険箇所であると指摘した場所を示す地図の右半分を示す図解図である。
【図17A】図17Aは実験において第1群運転者全員が首振り確認動作をした場所と第2群運転者全員が首振り確認動作をした場所を示す地図の左半分を示す図解図である。
【図17B】図17Bは実験において第1群運転者全員が首振り確認動作をした場所と第2群運転者全員が首振り確認動作をした場所を示す地図の右半分を示す図解図である。
【発明を実施するための最良の形態】
【0036】
図1に示すこの発明の一実施例の交通ハザードマップ生成装置100は、図2に示す運転行動自動評価システム(以下、単に「システム」という。)10を含む。したがって、以下の説明では、図2‐図13を参照してまずこのシステム10を詳細に説明し、ついで、交通ハザードマップ生成装置100を説明する。
【0037】
システム10は、危険箇所に対する自動車の運転者の運転行動を評価するためのものであり、計測部(計測装置)と解析部(解析装置)とを含む。具体的には、システム10は、計測部として、計測制御用コンピュータ12、角速度センサ14,16および18、およびGPS受信機20を含み、解析部として解析用コンピュータ22を含む。
【0038】
なお、この実施例では、計測制御用コンピュータ12と解析用コンピュータ22として、別個のコンピュータを使用するようにしているが、1つのコンピュータが両者の機能を備えるようにしてもよい。
【0039】
計測制御用コンピュータ12は、データ計測を行うためのものである。計測制御用コンピュータ12としては、この実施例ではPDA(携帯情報端末)が用いられるが、他の実施例では、パーソナルコンピュータ、自動車の電子制御ユニットのコンピュータ、カーナビゲーションシステムのコンピュータ等であってもよい。
【0040】
計測制御用コンピュータ12は、図示は省略するが、CPU、ROM、RAMおよび通信装置等を備えている。ROMは制御プログラムおよび必要なデータを予め記憶している。RAMはワークメモリおよびバッファメモリとして使用され、生成したデータや取得したデータ等を一時記憶する。通信装置は、この計測制御用コンピュータ12に接続される角速度センサ14、16、18等のような各装置との間でデータを送受信する。
【0041】
この実施例では、運転者の頭部の動きを検出する動き検出手段として、角速度センサ14が適用され、また、運転者の右足先の動きを検出する動き検出手段としても、角速度センサ16が適用される。後述するように、角速度センサ14は運転者の左右の目視確認動作(左右確認動作)の検出のためのものであり、角速度センサ16は運転者のブレーキの構えの検出のためのものであるから、角速度センサ14および角速度センサ16としては、少なくとも1軸の角速度を検出可能なものが使用されればよい。したがって、1軸角速度センサ、2軸角速度センサまたは3軸角速度センサが使用され得る。また、角速度センサ14および角速度センサ16としては同一のものが使用されてよい。角速度センサ14、16は、所定周期(たとえば100Hz)で(一定時間ごとに)所定軸回りの角速度を検出する。また、角速度センサ14、16は通信機能を備えており、検出した角速度データをたとえば一定時間ごとにまたは所定タイミングで計測制御用コンピュータ12に送信する。また、この実施例では、角速度センサ14、16は、たとえばBluetooth(登録商標)のような近距離無線通信によって計測制御用コンピュータ12との間でデータを送受信する。なお、他の実施例では、角速度センサ14、16は有線で計測制御用コンピュータ12に接続されてもよいが、運転者の運転操作を妨げないようにするために無線で接続されるのが望ましい。
【0042】
角速度センサ14は、運転者の目視確認の動作を検出するために、運転者の頭部に装着される。左右への目視確認動作の際には、眼球だけが動くことはなく、一般的には多少なりとも頭部にも動きが生じる。そのため、頭部の動きを計測することで、視線方向の変化を運転者にさほど負荷をかけることなく推測することが可能となる。
【0043】
また、頭部への装着を簡単にするために、この実施例では図3に示すように帽子24が使用されており、角速度センサ14は帽子24のたとえば鍔の部分に取り付けられる。図3は帽子24を上から見た場面を示している。この角速度センサ14は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように、帽子24に取り付けられる。この角速度センサ14の取り付けられた帽子24を運転者が被れば、運転者の頭部の左右方向への回転(旋回)に応じた角速度データを計測することができ、つまり、運転者の頭部の回転すなわち目視確認動作を検出・計測することができる。この角速度センサ14の鉛直方向軸回りの角速度の検出方向については、図3で反時計回りが正方向に、時計回りが負方向に設定されている。帽子24を被った運転者が左方向を向けば正の角速度データが検出され、右方向を向けば負の角速度データが検出される。したがって、計測制御用コンピュータ12では、角速度センサ14の角速度データを解析することによって、運転者が左右に顔を向けたか否か、つまり、左右への目視確認動作を行ったか否かを判定することができる。
【0044】
なお、角速度センサ14は、たとえばヘアバンド,ヘアピン,バンダナ,カチューシャなど他の方法で頭部に装着されてよい。さらに、頭部に直接装着する以外に、ピアス,イヤリング,眼鏡,マスク,鼻輪などの手段を用いて頭部に装着するようにしてもよい。
【0045】
また、角速度センサ16は、運転者のブレーキの構えを検出するために、図4に示すように、運転者の右足先に装着される。ブレーキの構えは、運転者が危険の予測をしているか否か、万一の場合への備えができているか否かを知るための指標になり得ると考えられるので、角速度センサ16を右足先に装着することによって、ブレーキの構えの計測を可能にする。
【0046】
角速度センサ16は、たとえばバンド26を用いて運転者の右足先に取り付けられる。なお、角速度センサ16は他の方法で右足先に装着されてもよく、たとえば運転用靴のつま先の部分に角速度センサ16を内蔵させるようにしてもよい。さらに、アンクレット(足首に装着する足輪),靴下,ネイル(付け爪)などの手段を用いて足に装着することも考えられる。
【0047】
また、図4は、運転者からみた角速度センサ16を示している。角速度センサ16は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように、運転者の右足先に取り付けられる。角速度センサ16の鉛直方向軸回りの角速度の検出方向については、この実施例では、図4で反時計回りが正方向に、時計回りが負方向に設定されている。
【0048】
自動車が走行中には、図4に示すように、運転者の右足はアクセルペダル28上に置かれる。ブレーキの構えをしたり、減速をしたりする場合、図5に示すように、運転者の右足はブレーキペダル30側に移動され、その後、速度を維持したり加速をしたりする場合、図4に示すように、右足はアクセルペダル28側に戻される。このアクセルペダル28とブレーキペダル30間の移動には、左右方向への回転を伴うので、角速度センサ16によって、右足の回転を検出することによって、運転者がブレーキの構えをしているか否かを判定することができる。
【0049】
図1に戻って、角速度センサ18は、自動車(車両)の挙動を検出するためのものである。角速度センサ18としては、上述の角速度センサ14および16と同様のものが使用される。この実施例では、角速度センサ18は、粘着テープ等の固定部材を用いてダッシュボード上の所定の位置に装着される。角速度センサ18は、少なくとも鉛直方向軸回りの回転に応じた角速度を検出するように取り付けられる。したがって、自動車の左右方向への回転(旋回)に応じた角速度データを計測することができ、つまり、自動車の旋回すなわち右左折を検出・計測することができる。この角速度センサ18の鉛直方向軸回りの角速度の検出方向については、角速度センサ14および16と同様に、反時計回りが正方向に、時計回りが負方向に設定される。自動車が左方向に旋回すれば正の角速度データが検出され、右方向に旋回すれば負の角速度データが検出される。したがって、計測制御用コンピュータ12では、角速度センサ18の角速度データを解析することによって、自動車が右折または左折したか否かを判定することができる。
【0050】
GPS受信機20は、自動車の現在の位置を検出するための位置検出装置であり、たとえば自動車の屋根に取り付けられている。GPS受信機は、GPS衛星からの信号を所定周期(たとえば1Hz)で(一定時間ごとに)受信して、現在地の座標(緯度、経度、高度)を算出し、現在位置の座標を含む位置データを計測制御用コンピュータ12に出力する。
【0051】
なお、システム10は、GPS衛星からの信号を受信できない場所での位置推定のために、自動車に搭載された加速度センサ、車速センサ、角速度センサ18等を用いるようにしてもよい。また、GPS受信機20は、自動車に搭載されたカーナビゲーションシステムのGPS受信機を利用してもよい。
【0052】
計測制御用コンピュータ12は、角速度センサ14,16および18から受信した角速度データ、およびGPS受信機20から受信した位置データを、計測データとしてメモリに記録する。なお、角速度データおよび位置データでは、角速度値および座標は、それぞれ検出時刻または取得時刻に対応付けて記憶されている。
【0053】
自動車走行中に記録された計測データは、計測制御用コンピュータ12から解析用コンピュータ22に送信されて解析用コンピュータ22に取り込まれる。なお、計測データは、記憶媒体を介して解析用コンピュータ22に取り込まれてもよい。解析用コンピュータは、計測データを解析して、運転者の運転行動を評価し、評価結果を出力するためのものである。解析用コンピュータ22としては、この実施例では、パーソナルコンピュータが用いられる。解析用コンピュータ22は、図示は省略するが、CPU、ROM、RAM、HDD、通信装置および入力装置等を備え、さらに評価結果を出力するために出力装置(表示装置またはプリンタ等)を備えている。ROMは制御プログラム(解析プログラムを含む)および必要なデータを予め記憶している。RAMはワークメモリおよびバッファメモリとして使用され、生成したデータや取得したデータ等を一時記憶する。通信装置は、計測制御用コンピュータ12との間でデータを送受信する。
【0054】
運転行動を自動的に評価するためには、まず「満点」の基準を定める必要がある。指導員の模範運転を満点とし、そこからの差分で評点をつける方式も考えられるが、その場合、模範運転データが存在しない箇所での評価を行うことができない。そこで、この実施例では、ある地点において最低限なすべき安全確認・確保動作(事故予防動作)を定義し、それらの達成度でもって当該箇所における運転行動を評価する手法を採用する。すなわち、理想運転を満点とするのではなく、危険を事前に回避できる最低限度の運転を満点とする。
【0055】
自動車教習所の指導員に面接調査を行った結果、指導員は以下の点に着目して運転評価を行っているという知見を得た。すなわち、左右確認動作について、(1)確認の方向(左右)、(2)確認の回数、(3)確認の深さ(ミラー確認程度、より深い目視、振り返り確認(巻き込み確認))、(4)確認の持続時間(ちらりと見ただけなのか、じっくり見ているのか)、(5)確認を行うタイミング(危険箇所進入前、進入直前、進入中)。(6)危険箇所における車両速度、そして、(7)右足がどのペダル上にあるべきか(ブレーキの構えがなされているか)である。
【0056】
この知見に基づき、この実施例では危険箇所ごとに、当該箇所で最低限なすべき事故予防動作を上記(1)−(7)の評価項目を用いて各々定義し、その達成度でもって評価を行う。なお、事故予防動作の定義は、指導暦25年の教習所指導員によってなされた。運転行動評価の際には、(1)−(7)の評価項目がすべて満たされたときのみ、事故予防動作が正しくなされたものとみなす。
【0057】
解析用コンピュータ22には、運転者に走行させる所定のコース上に設定された危険箇所に関する情報が予め記憶されている。危険箇所は、典型的には事故多発地点である。所定のコースを公道上に設定する場合、当該公道上の危険箇所がコースに含まれるように運転行動評価のためのコースを設定する。また、運転行動評価のためのコースは、たとえば教習所や施設等に設けられてもよく、その場合、事故多発地点の形状をコース上に再現することによって、危険箇所を設ける。
【0058】
図6に危険箇所情報の一例が示される。危険箇所の識別情報(危険箇所ID)に対応付けて、当該危険箇所に関する種々の情報とともに、当該危険箇所に設定された事故予防動作の定義データが記憶されている。
【0059】
この実施例では、危険箇所の情報は、名称、座標および特徴等を含む。名称は、危険箇所に設定された名称である。たとえば、危険箇所が旧道3から旧道4に左折する交差点である場合、「旧道3→旧道4 左折」といった名称が設定されている。座標は、当該危険箇所の位置を示し、GPS受信機20で検出される自動車の位置データと同様に、緯度、経度および高度で表される。また、危険箇所は、実際には1点ではなく面積または幅をもった領域であるから、当該領域を示す座標データが記憶される。特徴は、当該危険箇所の運転に関わる特徴を示し、たとえば、当該危険箇所の通過の仕方が右折、左折または直進のいずれであるか、当該危険箇所が交差点であるか否か、当該危険箇所に信号が設置されているか否か、当該危険箇所に一時停止が義務付けられているか否か等が記憶されている。
【0060】
また、当該危険箇所に設定された事故予防動作の定義データが記憶されている。危険箇所には、1または複数の事故予防動作が設定される。評価項目として、左右確認動作の(1)確認方向、(2)確認回数、(3)確認の深さ、(4)確認時間、(5)確認のタイミング、(6)車両速度、および(7)右足位置に関する情報が記憶されている。
【0061】
たとえば、事故予防動作として、左折前の左側巻き込み確認動作の場合、(1)確認方向として左、(2)確認回数として1回、(3)確認の深さとして左後方振り返り確認、(4)確認時間として、ちらりと見るだけの動作は不可、(5)確認タイミングとして、左折開始直前、(6)車両速度として、20km/h以下、そして、(7)右足位置として、定義せず、といった定義が行われる。評価を行わない項目には、定義せず(定義無し)を示すデータが設定される。
【0062】
続いて、図7から図12に示すフロー図を参照しながら、このシステム10の具体的な動作の一例を説明する。
【0063】
まず、ステップS1では、計測制御用コンピュータ12によってデータ計測を行う。運転者に角速度センサ14および16を取り付けた状態で、所定のコース上を走行させて、データ計測を行う。頭部の角速度センサ14の角速度データ、右足先の角速度センサ16の角速度データ、および車両の角速度センサ18の角速度データは、たとえば100Hzでサンプリングされ、GPS受信機20の位置データは、たとえば1Hzでサンプリングされて、それぞれのデータが計測制御用コンピュータ12に記録される。
【0064】
次に、ステップS3で、計測データを解析用コンピュータ22に読み込む。このデータの取り込みは、走行後に計測制御用コンピュータ12から解析用コンピュータ22に計測データを送信することによって行われ、あるいは、計測データをメモリカードのような記憶媒体に記憶し、当該記憶媒体から計測データを解析用コンピュータ22に読み込む。続くステップS5以降の処理は解析用コンピュータ22で実行される。危険箇所ごとにステップS5以降の処理が実行される。
【0065】
ステップS5では、GPSデータに基づいて、自動車が危険箇所に差し掛かった時刻を取得する。具体的には、GPSデータの緯度情報,経度情報と危険箇所の座標データに基づいて、事前に設定した危険箇所に差し掛かった時刻を取得する。この際、この実施例では、危険箇所の50m手前の時刻ta,危険箇所直上(進入直後)の時刻tb,危険箇所通過直後の時刻tcの3つの時刻を取得する。なお、時刻taは、危険箇所における運転行動を評価するための解析対象データの開始位置を決めるためのものであり、この実施例では危険箇所から50m手前を開始位置としているが、この所定距離は適宜変更されてよい。
【0066】
また、ステップS7で、当該危険箇所が交差点であり、かつ、右左折が生起する箇所であるか否かを危険箇所情報に基づいて判断する。ステップS7で、“YES”であれば、ステップS9で、車両の角速度データに基づいて、交差点進入開始時刻tb´を取得する。つまり、車両が右左折を開始した時刻の推定を行う。具体的には、GPSによって取得した危険箇所の50m手前の時刻taから、角速度センサ出力の積分を開始し、積分値が所定の閾値(この実施例では5度)を越えた時刻を交差点進入開始時刻tb´とする。なお、この実施例では、角速度センサ18のサンプリングレートは100Hzであり、GPS受信機20のそれよりも密であるため、GPSデータによって推定した危険箇所直上(進入直後)の時刻tbよりも、角速度センサ出力の積分によって推定した交差点進入開始時刻tb´を優先する。一方、ステップS7で“NO”の場合、処理はそのままステップS11へ進む。
【0067】
ステップS11では、時刻taから時刻tcまでの計測データを当該危険箇所の解析対象データとして設定する。
【0068】
続いて、ステップS13では、解析対象データにおける頭部の角速度データから首振り角度の時系列データを取得する。つまり、頭部の角速度センサ出力を積分し、或る時刻における首振り角度を推定する。ただし、角速度データを単純に積分しただけでは、誤差が蓄積し、実際の値とは大きく異なる推定値となることが知られている。これに対処するため、この実施例では、次の方策を採る。走行中、すなわち自動車の速度が0km/hでないとき、運転者の頭は基本的に正面を向いていると考えられる。そこで、走行中に時間theadの間、ωhead以上の角速度が検出されない場合には首振り角度を0にリセットする。累積誤差のリセットを決定するためのパラメータは、実験的に求められ、この実施例では、時刻theadは3.0sであり、ωheadは30.0deg(度)/sである。
【0069】
また、ステップS15では、解析対象データにおける右足の角速度データから右足の移動角度の時系列データを取得する。つまり、右足先の角速度センサ出力を積分し、或る時刻における右足の位置を推定する。上述の首振り角度の場合と同様に、積分の際の誤差を除去するために、次の方策を採る。ビデオ検証による知見では、走行中、運転者の右足は基本的にアクセルペダル28を踏んでおり、必要に応じてブレーキペダル30上に足を移動させることが多い。そこで、走行中に時間ttoe の間、ωtoe 以上の角速度が検出されない場合には、足の位置をアクセル位置にリセットする。この実施例では、実験的に求めた時刻ttoe は15.0sであり、ωtoe は30.0deg/sである。
【0070】
また、ステップS17では、GPSデータから解析対象データ区間の車速データを算出する。車速は、たとえば1秒間の移動距離から算出される。
【0071】
続いて、図8のステップS19で、首振り角度の時系列データに基づいて、左右確認の方向、回数、および時間を検出する。具体的には、首振り角度の時系列データにおいて、絶対値15度以上の角度が生じた場合、左右確認行動が生起したものとみなす。つまり、評価項目(2)の確認回数が+1となる。また、それ以降連続して15度以上の角度が生じている間は、1回の左右確認行動が継続しているものとみなす。この継続時間を、評価項目(5)の確認時間とする。また、図3に示したように、首振り角度の符号が正の場合、評価項目(1)の確認方向は左方向であり、負の場合、評価項目(1)の確認方向は右方向である。
【0072】
さらに、ステップS21で、確認時間中の最大首振り角度を算出し、その大きさに基づいて、評価項目(3)の左右確認の深さを検出する。この実施例では、確認の深さを3段階に分けて評価するようにしている。具体的には、最大首振り角度が15deg以上35deg未満の場合、浅い確認動作と評価し、最大首振り角度が35deg以上55deg未満の場合、普通の確認動作と評価し、最大首振り角度が55deg以上の場合、振り返り確認動作であると評価する。これらの確認動作の分類の閾値は、実験の計測データとビデオ分析によって取得された。
【0073】
続いて、ステップS23で、当該危険箇所に対して設定されている事故予防動作の定義データをROMまたはHDDからメモリ(RAM)に読み出す。危険箇所に対しては、複数の事故予防動作を設定することが可能であり、事故予防動作ごとに、当該動作が正しくなされたかどうかをチェックする。
【0074】
まず、ステップS25で、左右確認動作の確認タイミングの条件に基づいて、評価対象時間を設定する。たとえば、確認タイミングが「左折開始直前」と設定されている場合、交差点進入開始時刻tb´の一定時間前(この実施例では3秒前)から、交差点進入開始時刻tb´までの時間のみを評価対象とする。
【0075】
そして、ステップS27で、評価対象時間内に、確認の方向、回数、深さおよび時間の条件が満足されているか否かを判断する。ステップS27で“YES”の場合、つまり、左右確認動作の(1)から(5)の評価項目が満足された場合には、ステップS29で、左右確認動作の評価を「OK」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS31で、当該左右確認動作について「OK」のテキスト情報をメモリに生成する。このテキスト情報は、評価結果画面において、左右確認動作の評価結果を表示するためのものである。ここでは、左右確認動作が正しく行われたことを表示するためのテキスト情報が生成される。ステップS31を終了すると、つまり、左右確認動作の評価を終了すると、処理は図10のステップS57に進む。
【0076】
一方、ステップS27で“NO”の場合、つまり、評価対象時間内に左右確認動作が正しく達成されていない場合には、さらにその達成度を調べる。つまり、ステップS33で、評価対象時間内に確認方向の条件が満足されていないか否かを判断する。ステップS33で“YES”の場合には、つまり、評価時間内に確認すべき方向の確認動作が全く生じていない場合には、ステップS35で、左右確認動作の評価を「不確認」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS37で、当該左右確認動作について、「警告」のテキスト情報をメモリに生成する。左右確認動作が全く行われていないので、当該事項を警告するためのテキスト情報が生成される。ステップS37を終了し、またはステップS33で“NO”の場合、処理はステップS39に進む。
【0077】
図9のステップS39では、評価対象時間内の確認の深さのレベルが条件よりも低いか否かを判断する。つまり、評価時間内に確認方向の確認動作は生じたものの、最大首振り角度が条件を満足していない場合には、ステップS41で、左右確認動作の評価を「浅い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS43で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりも浅い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS43を終了し、またはステップS39で“NO”の場合、処理はステップS45に進む。
【0078】
ステップS45では、評価対象時間以前に、確認の方向、回数、深さおよび時間の条件が満足されたか否かを判断する。ステップS45で“YES”の場合、つまり、評価対象時間直前の所定時間の間に、左右確認動作が行われたと判断される場合には、ステップS47で、左右確認動作の評価を「タイミングが早い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS49で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりもタイミングの早い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS49を終了し、またはステップS45で“NO”の場合、処理はステップS51に進む。
【0079】
ステップS51では、評価対象時間以後に、確認の方向、回数、深さおよび時間の条件が満足されたか否かを判断する。ステップS51で“YES”の場合、つまり、評価対象時間直後の所定時間の間に、左右確認動作が行われたと判断される場合には、ステップS53で、左右確認動作の評価を「タイミングが遅い」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS55で、当該左右確認動作について、「注意」のテキスト情報をメモリに生成する。条件よりもタイミングの遅い確認動作が行われたので、当該事項を注意するためのテキスト情報が生成される。ステップS55を終了し、またはステップS51で“NO”の場合、処理はステップS57に進む。
【0080】
図10のステップS57では、評価対象時間内の車両速度の条件が満足されたか否かを判断する。ステップS57で“NO”の場合、つまり、車速データを参照して、条件を超える車両速度が検出された場合には、ステップS59で、車両速度の評価を「速度超過」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS61で、当該車両速度について、「警告」のテキスト情報をメモリに生成する。車速が安全確認および安全確保のために必要とされる速度を超えているので、当該事項を警告するためのテキスト情報が生成される。
【0081】
なお、危険箇所が一時停止の必要な場所であって、事故予防動作が一時停止である場合には、たとえば車両速度の条件が0km/hに設定され、評価対象時間内に車両速度が0km/hになったか否かが判断される。そして、満足されなかった場合、車両速度の評価が「一時停止不履行」と判定されるとともに、当該一時停止不履行を警告するためのテキスト情報が生成される。
【0082】
続いて、ステップS63で、右足の移動角度の時系列データに基づいて、評価対象時間内の右足位置を解析する。そして、ステップS65で、右足位置の条件が満足されたか否かを判断する。ステップS65で“NO”の場合、つまり、右足の位置が条件とは逆の位置であると判断される場合には、ステップS67で、右足位置の評価を「不可」と判定し、当該判定結果を示すデータをメモリに記憶する。また、ステップS69で、当該右足位置について、「警告」のテキスト情報をメモリに生成する。右足が条件とは異なる位置に存在するので、当該事項を警告するためのテキスト情報が生成される。ステップS69を終了したとき、または、ステップS65で“YES”の場合、またはステップS57で“YES”の場合には、処理はステップS71に進む。
【0083】
なお、この実施例では、車両速度の条件が満足されない場合に、右足位置の条件を判定するようにしている。これは、基本的には、車両速度が十分に減速されていない場合に、すぐに減速可能なように、ブレーキの構えができているかどうかを確認するためである。つまり、車両速度が既に十分に減速されている場合には、特にブレーキの構えをしていなくとも、安全確保に支障がないとの考え方によっている。たとえば、危険箇所が交差点であり、かつ右左折行動が生起される場合、安全確認および安全確保のために速度が十分に減速される必要があり、したがって、車両速度の条件に適切な値を設定することによって、安全を確保することが考えられる。一方、危険箇所が直進されるような場合、右左折が生起される場合よりも速度が高めに設定され得るので、右足位置の条件としてブレーキ位置を設定し、ブレーキの構えによって安全度を高めるようにすることが考えられる。ただし、他の実施例では、右足位置を車両速度に関係なく判断するようにしてもよく、その場合には、ステップS63からステップS69の処理を、ステップS57で“YES”の場合に続けて実行されるようにすればよい。
【0084】
図11のステップS71では、他の事故予防動作が存在するか否かを判断する。ステップS71で“YES”の場合、つまり、当該危険箇所に対して、他の事故予防動作が設定されている場合には、処理は、図8のステップS23に戻る。
【0085】
一方、ステップS71で“NO”の場合には、当該危険箇所に対する運転行動の評価結果の出力を行う。この実施例では、図13に示すような評価結果画面が表示装置に表示され、またはプリンタで用紙に印刷される。
【0086】
具体的には、ステップS73で、首振り角度、車両速度、右足位置の波形(時間変化)を描画する。これによって、図13の画面の下部に示すように、それぞれの波形のグラフが描画される。
【0087】
なお、図13のグラフの縦軸は角度(度)を表し、ほぼ中央に0が設定され、上方向が正、下方向が負である。首振り角度が正の場合は、左方向への首振りを示し、首振り角度が負の場合は、右方向への首振りを示す。また、横軸は経過時間(10ミリ秒)を表し、左端が0(危険箇所の50m手前の時刻ta)に設定される。この枠内に、首振り角度、車両速度および右足位置の波形が描画される。なお、枠の上側には、当該危険箇所の名称が表示されている。図13では、首振り角度の波形は実線で描かれ、車両速度の波形は破線で描かれ、右足位置の波形は点線で描かれている。右足位置については、角度の目盛−100がアクセルペダル28側を示し、−50がブレーキペダル30側を示すように調整されている。また、車両速度については、角度の目盛がそのまま速度(km/h)を示している。なお、図では表現できないが、各波形は互いに異なる色を用いて描画されることによって区別可能にされてもよい。
【0088】
続くステップS75で、波形解析に基づく運転者の挙動推定結果をテキスト情報としてグラフに描画する。これにより、どの時点でどのような確認動作を実行したかが表示される。具体的には、ステップS19およびS21の解析結果から、実行された左右確認動作を特定し、各確認動作の方向と深さとを示すテキストを、首振り角度の波形の対応する位置に描画する。首振り角度の波形とともに、確認動作を示すテキストが表示されるので、つまり、頭部の挙動を示す波形のグラフに、左右確認動作の注釈を付与することができるので、運転者の左右確認の挙動を簡単に把握することができる。
【0089】
また、ステップS77で、車両状況の推定結果をテキスト情報としてグラフに描画する。これにより、どの時点で危険箇所(交差点など)に進入したか等が表示される。図13では、危険箇所直上(進入直後)の時刻tb、または交差点進入開始時刻tb’に対応する位置に、上下方向に延びる2重線が描画される。さらに、「危険箇所(交差点)進入開始」を示すテキストが表示されている。首振り角度、右足位置および車両速度の各波形とともに危険箇所に進入した時点が明示されるので、危険箇所の手前、直前、直後などでの挙動の違いや変化などを容易に把握することができる。
【0090】
ステップS79では、左右確認動作、車両速度、右足位置の評価結果を示すテキスト情報を描画する。これにより、事故予防動作が正しくなされたかどうかが明示されるとともに、運転者の行動に予防安全の観点からみて改善すべき点がある場合には、当該事項が示される。図13では、グラフの上側に、評価結果を示すテキストが表示されている。当該危険箇所に複数の事故予防動作が設定されている場合、設定された順に、各事故予防動作の評価結果が示される。図13の例で、一番上の文は、「警告」のテキスト情報であり、警告は事故予防動作が行われなかったときの判定結果である。「警告」のテキスト情報は、たとえば赤色の文字によって表示される。この事故予防動作は一時停止であり、評価結果として、一時停止不履行であることと、そのときの車速とが示されている。上から2番目の文は、「OK」のテキスト情報である。交差点進入前の左確認が正しく行われたことが示されている。「OK」のテキスト情報は、たとえば青色の文字で表示される。3番目の文は、「注意」のテキスト情報である。交差点進入前の右確認が浅いことが示されている。「注意」のテキスト情報は、たとえばオレンジ色で表示される。4番目の文は「OK」のテキスト情報である。交差点進入中の左確認が正しく行われたことが示されている。
【0091】
ステップS81では、当該危険箇所の写真を描画する。写真データはROMまたはHDDに予め記憶されている。図13では、画面の上部右側に示されている。危険箇所の写真を表示することによって、当該危険箇所がどのように危険なのかを認識させることができ、したがって、どのような事故予防動作が必要であるかを容易に説明することができる。
【0092】
ステップS83では、描画した評価結果画面を出力する。この実施例では、表示装置に表示する。これによって、図13に示すような評価結果画面が表示される。これにより、このシステム10の使用者は、運転者の運転行動を容易に把握することができる。運転者は、当該危険箇所に対する自分の運転行動(左右確認動作、右足位置、車両速度)の時間変化を波形グラフによって一目で確認することができるとともに、評価結果を示すテキストによって事故予防動作の正否や達成度、改善点等も容易に知ることができる。この評価結果画面は、運転者に対して気づきを与えることができるので、教育上有用である。また、運転者だけでなく、教習所指導員等も、運転者の運転行動を容易に把握することができるので、指導や助言等をより的確に行うことができる。
【0093】
なお、この実施例では、定義された事故予防動作に対する運転者の運転行動の評価結果と一緒に、首振り角度(頭部の挙動)の波形、車速の波形、および右足位置(右足先の挙動)の波形をグラフで表示するようにしているが、他の実施例では、評価結果のみを出力するようにしてもよい。また、グラフ上には、必ずしも首振り角度の波形、車速の波形、および右足位置の波形のすべてを同時に出力しなくてもよく、いずれか1つまたはいずれかの組合せが出力されるようにしてもよい。
【0094】
ステップS83を終了すると、処理はステップS85に進み、評価結果に基づいて運転者の運転行動の採点が行われる。
【0095】
図12のステップS85では、車両速度の評価が「速度超過」であるか否かを判断する。ステップS85で“YES”の場合、処理はステップS89へ進む。一方、ステップS85で“NO”の場合、ステップS87で、危険箇所を通過するまで一度も左右確認をしなかったか否かを判断する。ステップS87で“YES”の場合、つまり、左右確認動作の評価結果が「不確認」である場合には、処理はステップS89へ進む。
【0096】
ステップS89では、運転者の点数を0点とする。このシステム10では、運転者の首振り角度によって左右確認動作が行われたか否かを判断するようにしており、厳密に運転者の視線が左右方向に向けられたかどうかを検出するようなことはない。左右確認を行おうとする際に車速が速過ぎると、よく見えないので、しっかりとした確認がなされるためには、車速は十分に減速される必要がある。そのため、この実施例では、左右に首振りを行ったことが検出される場合であっても、車両速度が超過していれば、目視による十分な確認が行われたとはみなさないこととした。したがって、速度超過の場合には、他の評価項目の結果に関係なく、0点とする。このように車速を評価項目に加えることによって、運転者の首振り確認動作が本来の左右確認の意図を持ったものであるかどうかを把握することができる。したがって、このシステム10を運転教習や再教育等に利用する場合に、運転者(受講者)の形だけの左右確認(確認する振り)に対して、合格点が与えられないようにすることができる。また、危険箇所を通過する際に一度も左右確認を行わないのは、運転者に事故予防意識がないと判断されるので、その場合にも、他の評価項目の結果に関わらず、0点とする。ステップS89を終了すると、処理はステップS103に進む。
【0097】
一方、ステップS87で“NO”の場合には、減点法によって採点を行う。なお、点数の初期値は満点(たとえば100点)である。具体的には、ステップS91で、評価結果の確認の深さのレベルが条件よりも低いか否かを判断する。確認レベルは、確認の深さに応じて設定されており、振り返り確認動作の場合、確認レベルは3、普通の確認動作の場合、確認レベルは2、浅い確認動作の場合、確認レベルは1、確認無しの場合、確認レベルは0である。ステップS91で“YES”の場合、つまり、評価項目に定義されている確認の深さのレベルよりも、評価結果の確認の深さのレベルが低かった場合には、ステップS93で、(レベル差×所定値(たとえば10点))を点数から差し引く。
【0098】
ステップS91で“NO”の場合には、処理はそのままステップS95に進む。ステップS95では、タイミングの評価結果が「早い」または「遅い」であるか否かを判断する。ステップS95で“YES”の場合には、ステップS97で、点数から所定値(たとえば10点)を差し引く。
【0099】
ステップS95で“NO”の場合には、処理はそのままステップS99に進む。ステップS99では、確認時間が短いか否かを判断する。具体的には、確認時間が所定の閾値(たとえば0.3s)未満であるか否かを判断する。ステップS99で“YES”の場合には、ステップS101で、点数から所定値(たとえば10点)を差し引く。ステップS99で“NO”の場合には、処理はそのままステップS103に進む。
【0100】
ステップS103では、点数を出力する。この実施例では、点数を表示装置に表示する。これにより、当該危険箇所に対する運転者の運転行動の点数が表示される。なお、当該危険箇所に対して複数の事故予防動作が設定されている場合、事故予防動作ごとにステップS91−S101の減点処理が行われる。また、点数は、コース上の他の危険箇所に対する点数と合算されてよく、その場合、コースに対する点数が得られる。点数は、教習や再教育等の運営者が受講者(運転者)のたとえば合否、教育過程、成長過程などの管理をするのに有用である。
【0101】
発明者らは、このシステム10の精度を定量的に評価するため、路上実車実験を行った。実験は、ある自動車教習所が主催するタクシー運転者再教育講習(事故を起こしたタクシー運転者を対象とした再教育プログラム)の参加者を対象に実施した。実験の際には安全のため、自動車教習所の教習車を使用し、教習員が助手席に同乗した。被験者はプロのタクシー運転者23名(男性21名,女性2名)である。各被験者は一人、あるいは二人一組となり、再教育講習カリキュラムで定められた所定の2コースのいずれか(コース1は京都府南部の公道10.9km、コース2は京都府南部の公道3.6km)を角速度センサ14および16を装着した状態で走行した。
【0102】
こうして計測したデータのうち、(A)幹線道路から信号交差点を右折して生活道路へ入る区間、(B)幹線道路から無信号交差点を左折して生活道路へ入る区間、(C)生活道路から別の生活道路へと無信号交差点を左折する区間、(D)生活道路から別の生活道路へと無信号交差点を右折する区間、(E)人通りの多い無信号交差点を直進する区間に特に着目し、重点的に解析を行った。なお、これら5区間は、再教育講習において、教習員が運転者の動きを重点的に観察する箇所でもある。
【0103】
まず、実験の様子を収録したビデオを指導員に全編目視でチェックしてもらい、被験者23人の各地点における運転行動を評価項目に基づいて評価してもらった。なお、今回の実験では、解析対象とした運転行動の総数は85である。85行動のうち、指導員によって良い運転と評価されたのは25行動であり、60行動は最低限なされるべき事故予防動作のいずれかを欠く、あるいはなされていたとしても上述の(1)〜(7)の評価項目の基準を完全には満たしていない、改善を要する運転行動であるとされた。
【0104】
次に、システム10による自動評価結果が、どの程度指導員評価と一致するのか検証した。システム10では、全85行動のうち24行動が良い運転と判定され、そのうち指導員評価と一致したのは22行動であった(適合率91.7%、再現率88.0%)。同様に、61行動がシステム10によって改善を要する運転行動と判定され、そのうち、(1)〜(7)のどの評価項目が満たされていないか(要改善ポイントは何か)という情報までが指導員と完全に一致したのは51行動であった(適合率83.6%、再現率85.0%)。
【0105】
このように、実験により、このシステム10によれば、指導員による評価結果と80%以上の精度で一致する評価を行うことができることが確認されている。
【0106】
なお、上述の実施例では、事故予防動作の評価項目として右足位置を含めており、右足位置の評価が不要な事故予防動作については、右足位置の評価項目を定義無しとして対応するようにしているが、他の実施例では、評価項目として右足位置を含まない事故予防動作定義がなされてもよい。右足位置の評価が必須となる危険箇所は、典型的には、直進される場所であり、走行上、十分な減速が必要ないような場所である。そのような危険箇所では、ブレーキの構えが行われている必要があり、したがって、右足位置の評価項目が必要となる。しかし、コース上の危険箇所として、すべて右左折行動を生起させる場所が採用されるような場合であれば、右足位置の評価項目は設けられなくてよい。
【0107】
また、上述の各実施例では、運転者の頭部および右足先の動きを検出するために、角速度センサ14および16を使用したが、他の実施例では、別の検出装置が使用されてもよい。たとえば、加速度センサを使用することも可能である。運転者の左右確認動作および右足の移動に応じて加速度が変化するので、動きデータとしての頭部の加速度データおよび右足先の加速度データを解析することによって、左右確認動作および右足の位置を解析することができる。
【0108】
ここまでで実施例の交通ハザードマップ生成装置100の一部を構成する運転行動自動評価システム10を説明したので、続いて交通ハザードマップ生成装置100の実施例の全体を説明する。
【0109】
この実施例では、交通ハザードマップ生成装置100は、生成コンピュータ102を含み、この生成コンピュータ102は、地図データを記憶する地図データ記憶装置104および図2‐図13を参照して説明した運転行動自動評価システム10における頭部角速度センサ14(図3)やGPS受信機20を利用して頭部角速度データおよび位置データを含む運転データを記憶する運転データ記憶装置106に結合される。地図データ記憶装置104は、電子道路地図などの地図データを蓄積し、さらには生成コンピュータ102で特定した危険箇所をそのような道路地図上に図示した交通ハザードマップ(のデータ)を必要に応じて保存する。
【0110】
なお、運転データ記憶装置106は、各運転者の頭部角速度センサ14(図3)で計測した角速度データ(運転者の頭部動きデータ)やGPS受信機20で獲得したGPSデータなどを含む全ての運転データを、各運転者毎に、運転開始から終了まで記憶しておく。運転行動自動評価システム10では先に説明したように所定箇所として設定した交差点付近だけでこれらの運転データを取得して運転行動を評価するだけであったが、交通ハザードマップ生成装置100では、運転開始から終了まで連続する角速度データや位置データとして取得し、運転データ記憶装置106に記憶しておく。そして、このとき、運転データ記憶装置106には、図2の解析用コンピュータ22が図12に従って算出した各運転者の評価点のデータも併せて記憶する。評価点データを記憶する理由は、後述のステップS113で、この評価点データを利用して各運転者を第1群運転者または第2群運転者のどちらかに区分するためである。したがって、第1群運転者および第2群運転者を事前に区分けするようにすれば、評価点データを記憶させておく必要はない。たとえば、発明者等が実験で行なったように、自動車教習所の指導員および一般運転者に試験走行をしてもらうような場合には、前者が第1群運転者として、後者が第2群運転者として事前に区分できる。
【0111】
なお、運転データ記憶装置106に運転データや評価点データを記憶させる方法は、たとえば、ネットワーク(図示せず)を使って解析用コンピュータ22から生成コンピュータ102に転送して記憶させる方法、USBメモリや光ディスク媒体などの可搬記憶装置を用いて記憶させる方法などが考えられるが、任意の方法が採用されてよい。
【0112】
生成コンピュータ102はまた、生成した交通ハザードマップを、地図データ記憶装置104に記憶している交通ハザードマップデータに基づいて、ディスプレイ108で表示したり、必要に応じて、カラープリンタ110で印刷出力したりする。さらに、図示していないが、生成した交通ハザードマップ(のデータ)は、ネットワークを介して他所へ転送されてもよい。
【0113】
図14を参照して、最初のステップS111で、生成コンピュータ102は、運転データ記憶装置104から、運転者1人ずつ、当該運転者の運転データ、少なくとも、頭部角速度センサ14(図2)で検出した角速度データ(頭部動きデータ)およびGPS受信機20(図2)によって検出した位置データ、ならびに必要な場合に評価点データを取り込む。
【0114】
ついで、ステップS113において、生成コンピュータ102は、そのときの運転者の評価点が閾値を超えているかどうか判断する。“YES”なら、生成コンピュータ102は次のステップS114において当該運転者を第1群に属する運転者(第1群運転者)に区分する。第1群とは、運転技術が優れた優良運転者もしくは熟練運転者が属するグループを意味し、第1群運転者とはしたがって、優良運転者もしくは熟練運転者を意味する。ステップS113の判断が“NO”なら、生成コンピュータ102は次のステップS115において当該運転者を第2群に属する運転者(第2群運転者)に区分する。第2群とは、第1群に区分できない運転技術が優れているとは言い難い運転者もしくは熟練しているとは言い難い運転者が属するグループを意味し、第2群運転者とはしたがって、非優良運転者もしくは非熟練運転者を意味する。
【0115】
ただし、上述のように事前に第1群運転者および第2群運転者が区分されるのであれば、このステップS113,S114およびS115は不要であるし、ステップS111で評価点データを取り込む必要もない。この場合には、ステップS111において、第1群運転者か第2群運転者かのラベル付で個々の運転者の運転データを入力する必要がある。
【0116】
次のステップS117において、生成コンピュータ102は、ステップS111で入力した運転データに含まれる頭部角速度データを積分して左右確認時の頭部動き角度(首振り角度)を、たとえば図13における波形図のような時系列データとして算出する。ただし、運転行動評価システム10からそのまま運転データを取り込む実施例であれば、運転データには既に運転者の首振り角度が含まれる(ステップS113)が、ここで再び首振り角度を計算する理由は、ステップS113では運転行動評価のために危険箇所として予め設定された場所での時刻ta‐tcの限られた範囲での首振り角度を計算するだけであるので、顕在的な危険箇所だけでなく潜在的な危険箇所を検出する交通ハザードマップ装置100の目的のためには、評価のために予め設定した場所以外でも首振り角度データが必要だからである。
【0117】
そして、ステップS119において、生成コンピュータ102は、ステップS117で計算した時系列首振り角度データと位置データ(GPSデータ)とを照合して、所定の閾値以上の首振り角度が生起した場所の経緯度データないし位置データを、確認場所データとして第1群運転者と第2群運転者とに分けて記憶する。この経緯度データの記憶場所は、生成コンピュータ102の内部メモリである。ただし、運転データ記憶装置106など任意の記憶場所であってよい。
【0118】
ステップS111‐S119は、ステップS121で全運転者分の処理が終了したかどうかの判断において“YES”が判断されるまで繰り返し実行される。
【0119】
ステップS121で“YES”が判断されたとき、生成コンピュータ102は、ステップS123において、ステップS119で記憶した経緯度データ(確認場所データ)を参照して、第1群運転者全員が共通して一定以上の角度で首振り(頭部動き)を実行した場所の経緯度データ(第1群運転者確認地点データ)を抽出する。つまり、ステップS123ではステップS119で記憶手段に格納されている第1群運転者の確認場所データを全ての第1群運転者について論理積(AND)をとることによって、全第1群運転者が共通して首振り確認動作を行なった確認場所を特定する。ただし、各運転者の位置データがたとえばGPSの受信状況などで微妙にずれていることも考えられる。そこで、この実施例では、GPSの分解能に相当する誤差を除くために、たとえば、最初の第1群運転者の第1群確認場所データが示す場所から後続の第1群運転者の第1群確認場所データが示す場所が10m以下の近傍を示している場合には、同じ第1運転者確認場所データあるとみなすようにした。
【0120】
続くステップS125において、生成コンピュータ102は、ステップS119で記憶した経緯度データを参照して、第2群運転者全員が共通して一定以上の角度で首振り(頭部動き)を実行した場所の経緯度データ(第2群運転者確認場所データ)を抽出する。このステップS125での抽出方法はステップS123での抽出方法と同じでよい。つまり、ステップS125では、第2群運転者確認場所データの論理積(AND)をとることによって、全第2群運転者が共通して首振り確認動作を行なった場所(経緯度)を特定する。
【0121】
そして、ステップS127において、生成コンピュータ102は、第1群運転者確認場所データと第2群運転者確認場所データとが一致している場合には、それらの確認場所データが示す場所を危険箇所として特定するとともに、第1群運転者確認場所データと第2群運転者確認場所データとが不一致の場合、第1群運転者確認場所データが示す場所を危険箇所として特定する。それは次のような発明者等の知見に基づく。
(1)明らかに見通しが悪いような場所、明らかに危険そうな場所では、危険認知があまりできない人(第2群運転者)であっても、事故を未然に防ぐための防御的行動ないし予防動作(減速、左右確認)を行なう。つまり、見るからに危険だと判断できる箇所では、多くの人が防御的行動(事故予防動作)を自発的に実行するため、潜在的な危険度は、実はそれほど高くないとも考えられる。少なくとも、このような場所では、各運転者の技能差が出にくい(皆が防御的行動をとるため)。
(2)見通しのよい場所において、(対向車などが来ていないにもかかわらず)減速し左右確認することは、周囲の交通を乱すことにつながる。たとえ、自動車教習所の指導員であっても、見晴らしのよい場所では、外乱がないときには減速や左右確認は行わない。
(3)「一見」なんでもないように見えて、実は見通しが悪い交差点(たとえば、十宇交差点において、一方は見通ししがよいが、もう一方にブロック塀などの遮蔽物があって見通しが悪くなっている箇所、など)などでは、危険認知ができる人(第1群運転者)であれば防御的行動(事故予防動作)をとるものの、危険認知があまりできない人(第2群運転者)では、警戒を忘れ、速度も落とさずに進入してしまうことがある。このような交差点こそ、潜在的に危険であり、また、各運転者の技能差が出やすい場所と考えられる。
(4)運転技能評価システム10を利用して運転データを取得した場合、各運転者が、どこで、どのような頭部の動きをしていたのかが分かる。言い換えると、その運転者が、どこで、本来すべきであった防御的行動または予防動作をしなかったのかが分かる。
(5)そこで、図1に示す実施例の交通ハザードマップ生成装置100においては、危険認知ができる運転者グループ(第1群)および危険認知ができない運転者グループ(第2群)ごとに運転データを取得し、第1群運転者(危険認知ができる運転者)が「共通して見る」箇所を地図上にプロットする。多人数の第1群運転者確認場所データの「AND」をとることで、周囲の交通状況に起因する動き(対向車がきたのでそちらを見た、など)を排除し、地形的要因による防御行動(確認行動)のみを抽出する。1人か2人だけの第1群運転者が「たまたま見た」のであれば、全員の第1群運転者確認場所データのANDをとった場合、たまたま生起した第1群運転者確認場所データは残らなくなる。「見通しが悪いから」「危険だと思ったので」見た、のであれば、全員の第1群運転者確認場所データのANDをとっても残る。したがって、危険認知ができる第1群運転者が(首振り確認動作によって)共通して見る箇所をプロットすれば、(1)の明らかに危険そうな箇所(顕在的危険箇所)と、(3)の「一見」なんでもないように見えて、実は見通しが悪い場所(潜在的危険箇所)とを抽出できると期待できる。
(6)次に、危険認知があまりできない第2群運転者の頭部の動きを(5)の上にプロットする。第1群運転者とで第2群運転者が共通して首振り確認動作を行なう場所は、(1)の明らかに危険そうな場所と推察できる。また、第1群運転者は見るものの、そうでない第2群運転者は見ない箇所は(3)の「一見」なんでもないように見えて、実は見通しが悪い場所と推測できる。つまり、第1群運転者確認場所データと第2群運転者確認場所データとの排他的論理和(NOR)を取ることによって、潜在的危険箇所を特定することができる。
(7)以上の手順により、(3)の「一見」なんでもないように見えて、実は危険な場所を危険箇所(潜在的危険箇所)として特定することができる。
【0122】
つまり、ステップS127で、第1群運転者確認場所データと第2群運転者確認場所データとが一致している場合には、それらの確認場所データが示す場所を顕在的危険箇所として特定する。一方で、第1群運転者確認場所データと第2群運転者確認場所データとが不一致の場合、第1群運転者確認場所データが示す場所を潜在的危険箇所として特定する。
【0123】
ステップS129において、ステップS127で特定した危険箇所をプロットした交通ハザードマップを生成し、地図データ記憶装置104に保存する。必要に応じて、ディスプレイ108に表示したり、カラープリンタ110で印刷したりするようにしてもよい。
【0124】
この場合、ステップS127を実行した結果判明した、顕在的危険箇所と潜在的危険箇所とは区別できるように地図上にプロットすることが望ましい。
【0125】
しかしながら、顕在的危険箇所と潜在的危険箇所とを区別する必要ないなら、ステップS127では、第2群運転者確認場所データとの比較なしに、第1群運転者確認場所データだけを参照して危険箇所を特定するようにしてもよい。
【0126】
発明者等が行なった実験では、実施例の交通ハザードマップ生成装置100の有効性が確認できた。実験では、第1群運転者(熟練者)としての自動車教習所の指導員4名と、第2群運転者としての一般運転者3名に、京田辺市のコース3.6kmを走行してもらった。
【0127】
図15Aおよび図15Bは、ステップS117で得た時系列運転データに従って、どの指導員(熟練者1‐4)が、どの場所で確認行動すなわち首振り確認動作をしたのかを、地図上に色の違うバルーン図形を使ってプロットしたものである。ただし、頭部角速度センサ14によって±50deg/s以上の頭部の動きがあったと認められた場合、首振り確認行動をしたとみなすものとし、指導員(第1群運転者)の少なくとも一人が首振り確認した場所を全てプロットしている。ただし、図15Aおよび図15Bで1枚の地図を示し、図15Aが左半分であり、図15Bが右半分である。図16Aおよび図16B、図17Aおよび図17Bも同様である。
【0128】
図15を見ると、地形的要因による事故予防動作と、周囲の交通状況に起因する動き(対向車がきたのでそちらを見た、など)が混在し、コース上のほぼ全ての地点にプロットがなされていることが分かる。
【0129】
次に、図15のプロットを整理し、全ての指導員(第1群運転者)が共通して見た箇所のみを抽出した地図を図16(図16Aおよび図16B)に示す。GPSの誤差はおおよそ半径10m以内といわれているため、まず熟練者1(第1群運転者)の任意のプロットを選択し、周囲10m以内に他の熟練者(第1群運転者)の首振り確認動作があるもののみを残した。
【0130】
図16において、黒の四角で表示されているのが、全部の指導員(第1群運転者)が共通して首振り確認動作を実行した場所である。なお、図中の破線円は、指導員が手動で設定した危険箇所である。太い破線円はそのなかでも特に重視している危険箇所である。四角と破線円を比較すると、実際の第1群運転者確認場所と第1群運転者が危険と感じている場所とがかなり共通していることが見て取れる。
【0131】
さらに、図16に、一般運転者(第2群運転者)3名が共通して首振り確認動作をした箇所を重畳してプロットした地図が図17Aおよび図17Bに示される。図17で、バルーン図形で示されているのが一般運転者(第2群運転者)が共通して首振り確認動作をした場所、つまり第2群運転者確認場所である。これを見ると、指導員(第1群運転者)が共通して首振り確認動作をする箇所と、一般運転者(第2群運転者)が共通して首振り確認動作をする箇所には、かなりの違いが認められる。
【0132】
第1群運転者である指導員と、第2群運転者である一般運転者が共通して首振り確認動作を行なった場所(図17中の場所A,B,C,G,H)は、信号交差点であったり、みるからに見通しの悪い交差点であったりするので、顕在的な危険箇所と考えられる。他方で、第1群運転者である指導員は首振り確認動作を実行したが第2群運転者である一般運転者は首振り確認動作を実行しなかった場所(図17中の場所D,E,F)は、無信号交差点が殆どであり、潜在的な危険箇所と考えられる。
【0133】
さらに、図17において太い破線円で示される重点危険箇所(指導員が手動で設定)を見ると、4箇所中の3箇所において、指導員は見ているものの、一般運転者は見ていないことが分かる。なお、本実験においては、指導員4名中、3名は、どの地点に危険箇所が設定されているか事前に知らされず走行している。
【0134】
このように、実験の結果より、図1および図14に示す実施例の交通ハザードマップ生成装置100によれば、自動的に危険箇所(特に、予防安全の観点から、各運転者の技能差が出やすい箇所)の推定が、或る程度できたと考えられる。
【0135】
また、図17において「I」で示す場所は、指導員(第1群運転者)が指摘していないにも拘らず、実際の走行実験では潜在的な危険箇所として抽出された場所である。この場所Iでは道路構造上、交通渋滞が頻繁に発生する。実験の様子を撮影したビデオで確認してみると、この場所に限らず、赤信号や渋滞などで車両が停止している際には、安全確認とは無関係に首振り確認動作が頻繁に生起していることが確認できた。しかしながら、実施例では、頭部の動きの生起は検出可能だが、その動きが首振り確認動作として生起したのか、単なるわき見として生起したのかは判断で着ない。そのため、首振り角速度から首振り角度を求め、首振り角度から確認行動なのかどうかを識別する必要がある。そのためには、自動車の速度も考慮して停車中と走行中を区別するなどの方法が考えられる。
【0136】
なお、上述の実施例では、交通ハザードマップ生成装置100は、運転行動自動評価システム10とは別のコンピュータ102で構成するように説明した。しかしながら、運転行動自動評価システムのコンピュータ、たとえば図2に示す解析用コンピュータ22が生成コンピュータ102と兼用されてもよい。したがって、特許請求の範囲で「コンピュータ」というときは、生成コンピュータ102、解析用コンピュータ22あるいは両者を指す場合があるものと理解されたい。
【符号の説明】
【0137】
10 …運転行動自動評価システム
12 …計測制御用コンピュータ
14 …角速度センサ(頭部)
18 …角速度センサ(車両)
20 …GPS受信機
22 …解析用コンピュータ
100 …交通ハザードマップ生成装置
102 …生成コンピュータ
104 …地図データ記憶装置
106 …運転データ記憶装置
【特許請求の範囲】
【請求項1】
複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および
前記複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段を備える、交通ハザードマップ生成装置。
【請求項2】
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段をさらに備え、
前記危険箇所特定手段は、前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段を含み、前記第1群運転者確認場所データが示す場所を危険箇所として特定する、請求項1記載の交通ハザードマップ生成装置。
【請求項3】
前記危険箇所特定手段は、前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段をさらに含み、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する、請求項2記載の交通ハザードマップ生成装置。
【請求項4】
前記危険箇所特定手段は、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、請求項3記載の交通ハザードマップ生成装置。
【請求項5】
複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転データを記憶する運転データ記憶手段、
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、
前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、
前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および
前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段を備える、交通ハザードマップ生成装置。
【請求項6】
前記危険箇所特定手段は、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、請求項5記載の交通ハザードマップ生成装置。
【請求項7】
所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶する動作定義データ記憶手段、および
前記動きデータ、前記位置データおよび前記動作定義データに基づいて、前記事故予防動作が正しくなされたか否かを評価して評価点を算出する評価手段をさらに備え、
前記評価点が閾値を超えた運転者を前記第1群運転者とし、それ以外の運転者を前記第2群運転者とする、請求項1ないし6のいずれかに記載の交通ハザードマップ生成装置。
【請求項8】
前記頭部動きデータ検出手段は、運転者の頭部に装着され、左右への首振り角度を検出する首振り角度センサを含む、請求項1ないし7のいずれかに記載の交通ハザードマップ生成装置。
【請求項9】
複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、前記コンピュータを、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および
前記複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段
として機能させる、交通ハザードマップ生成プログラム。
【請求項10】
複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、前記コンピュータを、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転データを記憶する運転データ記憶手段、
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、
前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、
前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および
前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定し、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段
として機能させる、交通ハザードマップ生成プログラム。
【請求項1】
複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および
前記複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段を備える、交通ハザードマップ生成装置。
【請求項2】
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段をさらに備え、
前記危険箇所特定手段は、前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段を含み、前記第1群運転者確認場所データが示す場所を危険箇所として特定する、請求項1記載の交通ハザードマップ生成装置。
【請求項3】
前記危険箇所特定手段は、前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段をさらに含み、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する、請求項2記載の交通ハザードマップ生成装置。
【請求項4】
前記危険箇所特定手段は、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、請求項3記載の交通ハザードマップ生成装置。
【請求項5】
複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置であって、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転データを記憶する運転データ記憶手段、
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、
前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、
前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および
前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段を備える、交通ハザードマップ生成装置。
【請求項6】
前記危険箇所特定手段は、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定する、請求項5記載の交通ハザードマップ生成装置。
【請求項7】
所定箇所ごとに最低限なすべき事故予防動作を、少なくとも左右確認動作および車速に関する評価項目を用いて定義した動作定義データを記憶する動作定義データ記憶手段、および
前記動きデータ、前記位置データおよび前記動作定義データに基づいて、前記事故予防動作が正しくなされたか否かを評価して評価点を算出する評価手段をさらに備え、
前記評価点が閾値を超えた運転者を前記第1群運転者とし、それ以外の運転者を前記第2群運転者とする、請求項1ないし6のいずれかに記載の交通ハザードマップ生成装置。
【請求項8】
前記頭部動きデータ検出手段は、運転者の頭部に装着され、左右への首振り角度を検出する首振り角度センサを含む、請求項1ないし7のいずれかに記載の交通ハザードマップ生成装置。
【請求項9】
複数の第1群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、前記コンピュータを、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転者毎の運転データを記憶する運転データ記憶手段、および
前記複数の第1群運転者毎の運転データに基づいて危険箇所を特定する危険箇所特定手段
として機能させる、交通ハザードマップ生成プログラム。
【請求項10】
複数の第1群運転者および複数の第2群運転者が同じ道路上で自動車を運転した結果に基づいて交通ハザードマップを生成する交通ハザードマップ生成装置のコンピュータに実行される交通ハザードマップ生成プログラムであって、前記コンピュータを、
運転者の頭部の動きデータを検出する頭部動き検出手段、
自動車の位置データを検出する位置検出手段、
それぞれが前記頭部動き検出手段によって検出された前記頭部の動きデータおよび前記位置検出手段によって検出された前記自動車の位置データを含む運転データを記憶する運転データ記憶手段、
前記頭部動きデータに基づいて首振り確認動作を実行した確認場所を特定する確認場所特定手段、
前記複数の第1群運転者が全員首振り確認動作を実行した場所の位置データである第1群運転者確認場所データを抽出する第1抽出手段、
前記複数の第2群運転者が全員首振り確認動作を実行した場所の位置データである第2群運転者確認場所データを抽出する第2抽出手段、および
前記第1群運転者確認場所データと前記第2群運転者確認場所データとが一致したときそれらの確認場所データが示す場所を危険箇所として特定し、前記第1群運転者確認場所データと前記第2群運転者確認場所データとが不一致のとき第1群運転者確認場所データが示す場所を危険箇所として特定する危険箇所特定手段
として機能させる、交通ハザードマップ生成プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図16A】
【図16B】
【図17A】
【図17B】
【図15A】
【図15B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図16A】
【図16B】
【図17A】
【図17B】
【図15A】
【図15B】
【公開番号】特開2011−118601(P2011−118601A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−274659(P2009−274659)
【出願日】平成21年12月2日(2009.12.2)
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(596027988)学校法人帝塚山学園 (3)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月2日(2009.12.2)
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【出願人】(596027988)学校法人帝塚山学園 (3)
【Fターム(参考)】
[ Back to top ]